Embed Size (px)
Citation preview

Robot Upgrade School
講師 :チーフアシスタント 出村 賢聖
アシスタント 赤沢 秀斗
ブロック長 出村 公成

タイムスケジュール
13:30 ~ 14:00 オムニサイエンスレクチャー
14:00 ~ 15:30 Robot Upgrade School
16:30 ~ 17:30 強化試合

オムニを使いこなそう!

ボールを追う

オムニの長所
自由自在に動ける

長所を活かす
戦術だ!

回り込み

自陣に戻る

回り込みについて

回り込み、どうすればできるの?
①ボールの方向がわかる
②オウンゴールしないよう動ける
③常にゴールの方向を向いている
方向

①ボールの方向検出
さあ、どうする?
ボールセンサは複数
ボールが近いほど値も大

最大値を求める
ボールが最も近い赤のセンサ
↓
値が最も大きい
赤 > 青 > 紫

②オウンゴールしないよう動く

横にあるボールは??

回り込みの軌跡 : 長方形型
簡単

回り込みの軌跡 : 多角形型
ボール誘導が速い

回り込みの軌跡 : 楕円,円型
ボール誘導は最速
難しい

Training Time(プログラミング修行)
1. ボールの方向をボールセンサ数と同じ数の方位で検出してLCDに表示
(if文を多く使う、例: 8個 →8方位, 3個 → 3方位)
2. ボール方向を検出して回り込み
3. ボール方向をできるだけ細かくLCDに表示
(ヒント : センサ値の比;
1距離 : 2距離 = 2値 : 1値, 数値は値の比)

最大値を求めるプログラム例

方位修正
ダイセンのコマンド

ダイセンのコマンドの欠点
1方向にしか回転できないから遅い

On-Off制御
目標と現在の方位の差を見る
向きたい方位 0°
今の方位 40°
方位の差0° - 40° = -40°
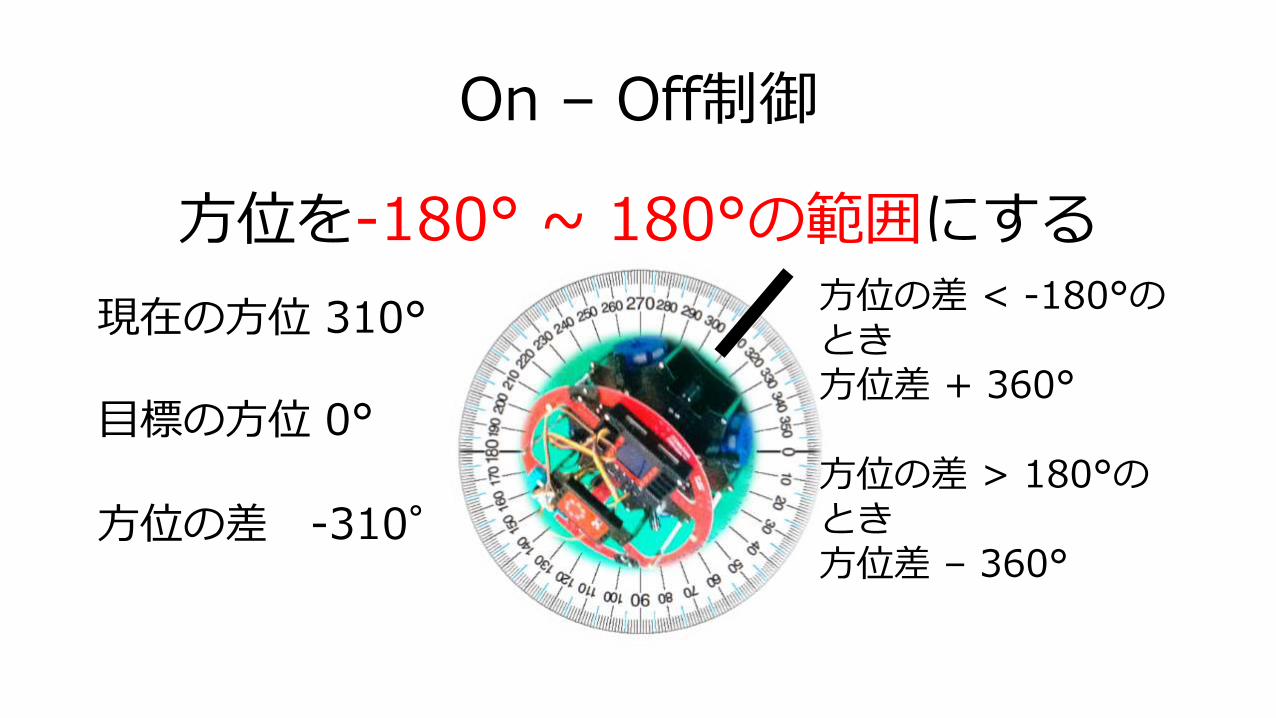
On – Off制御
方位を-180° ~ 180°の範囲にする
現在の方位 310°
目標の方位 0°
方位の差 -310°
方位の差 < -180°のとき方位差 + 360°
方位の差 > 180°のとき方位差 – 360°

On – Off制御
方位差の符号を見よう!
符号で回転方向が決まる
どっちに回転すれば??

On – Off制御プログラム例

On-Off制御の改良版・発展形
P(比例)制御 : 方位修正の速度を上げる
方位差が大きい
↓
回転の速度を上げる
I(積分)制御 : 障害物対策
方位差が変化しない
↓
回転パワーを増加する

Training Time
1. ダイセンのコマンドで方位制御
2. On-Off制御
3. P(比例)制御
(モータの値 = 方位差 * ゲイン)

自陣に戻る

超音波センサとは
超音波で距離をcm単位で測る
PINGの場合3~360cmまで計測
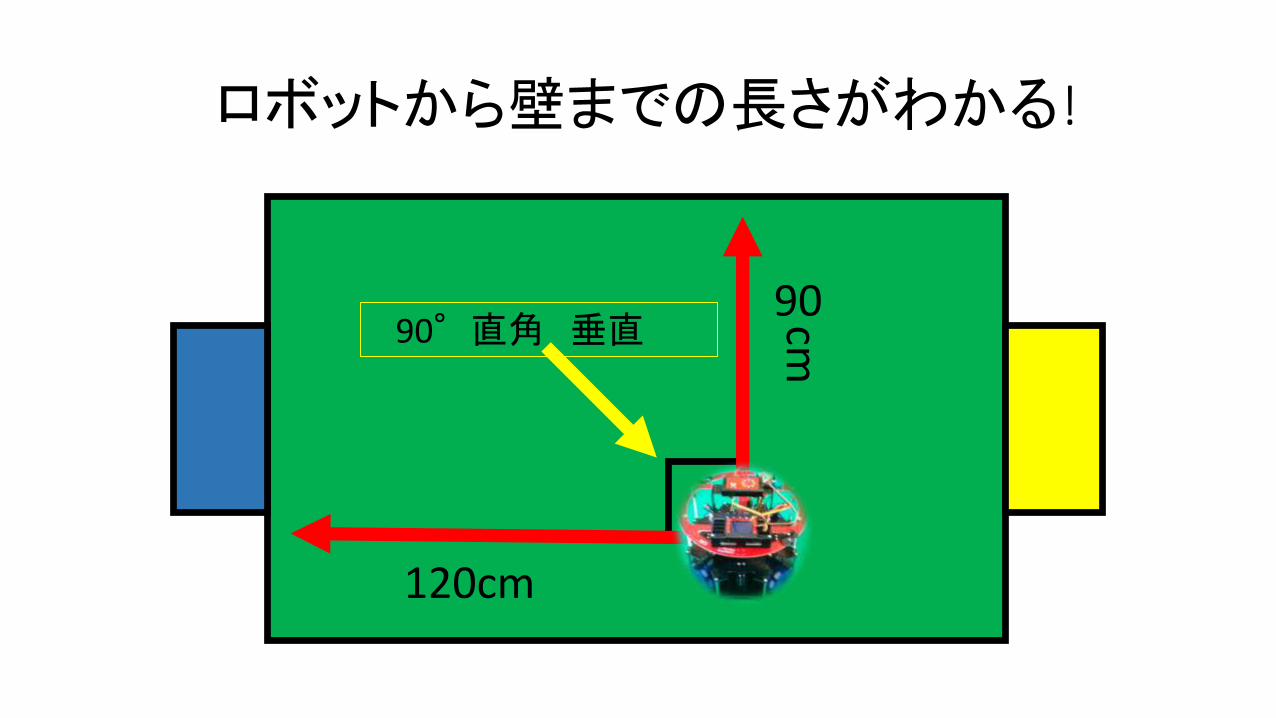
ロボットから壁までの長さがわかる!
90°直角 垂直90cm
120cm

Training Time1. ロボットと壁までの距離をLCDに表示
2. ボールが発見できなかったとき、ゴールに戻る
3. 掻きだしをする
4. ゴールに最短距離で戻る

サブプログラム ・ 関数
長いプログラムを一つのプログラムに!

早速試合プログラム制作!