Embed Size (px)
Citation preview

1
DEPARTMENT OF MECHANICAL ENGINEERING
ME 250 DESIGN AND MANUFACTURING I Fall 2013
ME 250 Final Report Team Ro-‐block
ME 250 Section #6, Team#3
Team Members
Stephen Barch: sbarch Kevin Dulic: kdulic
David Henderlong: dhenderl Chi Qiu: chiqiu

2
TABLE OF CONTENTS
ABSTRACT……………………………………………………………………………………………………………………………… 3 INTRODUCTION…………………………………………………………………………………………………………………….. 3 VEHICLE DESIGN Squad Strategy Selection……………………………………………………………………………………………. 4 Vehicle Objectives and Requirements……………………………………………………………………….. 6 Player Concept Design………………………………………………………………………………………………. 6 Detailed Design…………………………………………………………………………………………………………. 8 PRODUCT MANUFACTURING………………………………………………………………………………………………… 13 BILL OF MATERIALS………………………………………………………………………………………………………………. 13 PROTOTYPE TESTING Preliminary Test Results……………………………………………………………………………………………. 14 Redesign Based on Preliminary Tests……………………………………………………………………….. 15 Discussion of Competition Results……………………………………………………………………………. 15 DISCUSSION AND RECOMMENDATIONS Project Summary……………………………………………………………………………………………………….. 16 Future Project Idea……………………………………………………………………………………………………. 17 REFERENCES………………………………………………………………………………………………………………………… 17 ACKNOWLEDGEMENTS………………………………………………………………………………………………………… 17 APPENDICES
Strategies…………………………………………………………………………………………………………………. 18 Concept Sketches……………………………………………………………………………………………………… 19 Dimensioned Drawings and Manufacturing Plans…………………………………………………….. 20 Purchased and Traded Items…………………………………………………………………………………….. 58

3
1. ABSTRACT
This report contains a summary of Team 63’s ME 250 Project. It reports on our team and overall squad strategy. It details the selection of various strategies and vehicle designs, through concept selection charts and sketches. It describes our motivations for certain design characteristics through objectives and constraints of our robot. A detailed description of our analysis prior to manufacturing is also presented, along with a solid model using CAD software, engineering drawings, manufacturing plans, and a bill of materials. These items were the most critical in the design and manufacturing process. Additionally, we discuss the progression of our robot (including design changes or modifications), a critique on our performance at the M-‐Ball completion, and a summary of our entire project. We also speculate what we could have done better and a brief discussion on future projects and how ME 250 will help us. We acknowledge the help that faculty of the University of Michigan and other outside resources have provided us, in order to complete our project. The attached appendix includes resources such as individual strategies, concepts sketches, detailed engineering drawings, manufacturing plans, and an inventory list of purchased or traded materials. 2. INTRODUCTION All students in ME 250 class are divided into 8 sections and each section is a squad. Each squad is divided into 4 teams. We work in a team of four teammates to create a remote-‐controlled machine. Each team will design and build its own machine. Each squad (consisting of 4 machines) will compete against squads from other sections in the M-‐Ball competition which will use the North Campus arena shown below. Our team will collaborate with other teams from our section to score and prevent opponents from scoring. We can score by using machines to drop balls of different weights (but all approximately the size of a ping pong ball) in either the basket or the scoring hole located on the same side as your starting zone (shown in the figure). Our squad could get an additional 75 points if we place a Wolverine statue over the opponent’s scoring hole at the end of the round. After discussion, our team was assigned to be the ground defensive robot, which means we are responsible with coming up with and manufacturing a machine that can effectively stop opponents’ robots scoring by dropping balls on the ground to the hole.

4
Model of the actual M-‐Ball arena
3. VEHICLE DESIGN
3.1 Squad (Section) Strategy Selection
Stephen: Have three offensive robots, and one defensive robot. Two offensive robots will work together to score the more valuable (red and black) balls into the basket. One will focus on retrieving them from the ground and the tower, and the other will lift them into the basket. The third offensive robot will score the balls at the base of the tower into the hole. The defensive robot will focus on blocking our opponents from scoring in their hole and basket interfering with their offensive zone. This strategy is good because of its potential for a high amount of scoring; however, its weakness is that the offensive area may become too crowded. If the opposing squad prevents the “high offense” robots from working together, we will not be able to score as many points. (Appendix A.1) Kevin: Have three offensive bots, and one defensive bot. The three offensive bots consist of two hole-‐scoring, and one basket-‐scoring bot. The defensive bot is responsible for getting the wolverine and pushing opponents away from balls. This strategy is effective because it allows us to score quickly. Its main weakness is sacrificing defense for offense, as we only have one bot to protect our team. (Appendix A.2) David: As all the other teams are coming up with ways to capture the most balls and score the most points, they will surely be surprised when their bots are immobilized. #1 bot puts the

5
wolverine on top of the opponent’s goal. #2 puts the tower on top of the scoring hole. #3 puts a barrier on top of the opponent’s basket. Lastly #4 blocks the basket with a chained plate. I believe this is the best strategy because it is creative and law abiding. Not only does it guarantee success it provides great engineering, planning, and building. This strategy could be defeated if the ref believes we are cheating. (Appendix A.3) Chi: Have two defensive robots and two offensive robots. One of the defensive robots is responsible for blocking the hole. Another defensive bot would be designed to prevent opponents’ bots to score with basket. One of the offensive bot would be the basket-‐scoring bot with another one scoring by the hole. I consider this strategy very effective because blocking the hole would be the best option to defend the hole. And having two defensive bots can create enough space for offensive bots to score. The weakness would be that we couldn’t stop opponents’ bots keeping annoying our own offensive bots. (Appendix A.4) To select the final squad strategy, each team came up with their best strategy between the team members. Then the team leaders met and decided on the best of four strategies from each team. Our squad strategy consisted of a two bots devoted to offense, one for defense, and one for the wolverine. This strategy could be countered if the other team is able to score with all their bots, so that our squad could not compete with their high offense. To prevent this, we made the defensive bot capable of scoring as well as playing defense. From the squad strategy selection process, the two offensive robots decided to work together to score in the basket; one bot would use a conveyor belt to deposit balls in the basket, while the other robot would feed the conveyor belt balls from the ground. Once the teams were assigned a strategy, they were able to begin designing the player vehicles around design objectives and requirements.
Team 63’s final strategy: Disrupting opponents and some hole-‐scoring

6
3.2 Vehicle Objectives and Constraints
Characteristics Objectives Constraints
Forklift Immobilize robots Enough torque to lift bots
Large Leverage Immobilize robots Want the weight to be 10lb and ensure the center of mass
is at the rear
Ball Container Score loose ground-‐balls Bigger than 3x3 in^2
Tank Tread High Traction Enough Friction and Torque to push bots
Low Center of Mass Stability Keep the center of mass lower than 2’’ in front the ground
Large Footprint Stability Maximize size to be 10x12 in^2
Bumper Push robots Hard and big enough to prevent robot being damaged
We consider those are important because once we have those we can manipulate other bots effectively, we can completely prevent at least one of opponents’ offensive bot, so that we could have higher possibility to win the game.
3.3 Player Concept Design Using a concept selection chart we were able to determine the best possible design that meets our objectives and requirements. We ranked each category 1 through 10 (10 being the best) on how well each concept accomplished that characteristic. Also, we weighted each category based on importance to our strategy. Seen from the table below, we felt that torque and ability to manipulate other bots were the most essential. The various concepts may be found in Appendix B.

7
Concept Selection Chart
We combined the best aspects of all of our concepts to create the final concept, with an emphasis on manipulating other robots, torque, and traction.
Final Concept Sketch: Has tank treads, forklift, bumper, and ball container.

8
3.4 Detailed Design
3.4.1 Analysis Model

9
Motor Selection Analysis: Motor shaft stall torque @ 3V: 0.5 oz in Torque required to move 15 lb robot: T = Fs*r = µs*N*r = (1.035)*(60 oz.)*(1.75 in.) = 108.675 oz-‐in Maximum torque: Tmax = (0.5 oz-‐in) * (gearbox ratio) [from Polulu Website] Gearbox Efficiency: # of gear contacts = 2 ɳ = (0.95)2 = .9025
Gearbox Ratio Maximum Torque Theoretical Max Torque
115:1 57.5 oz-‐in 51.89 oz-‐in
344:1 172 oz-‐in 155.23 oz-‐in
344:1 Gearbox ratio gives up 38 rpm to the wheels.

10
Motion and Time Analysis: Use kinematic equations: x=x1 + v1*t + .5at^2 Assume the following: v1 = .33 ft/s and a = .164 ft/s^2
Step Distance (ft) Drive Time (s) Other Time (s)
Drive to opponent’s bot 8.43 8.33
Push opponent’s bot 0 0 10
Drive to another bot 3 4.36
Lift opponent’s bot 0 0 5
Drive to loose balls 1 2.08
Collect loose balls 10
Deposit balls into hole 4.2 5.42
Total 16.63 20.19 25
Total Time needed: 45 seconds

11
3.4.2 Solid Model
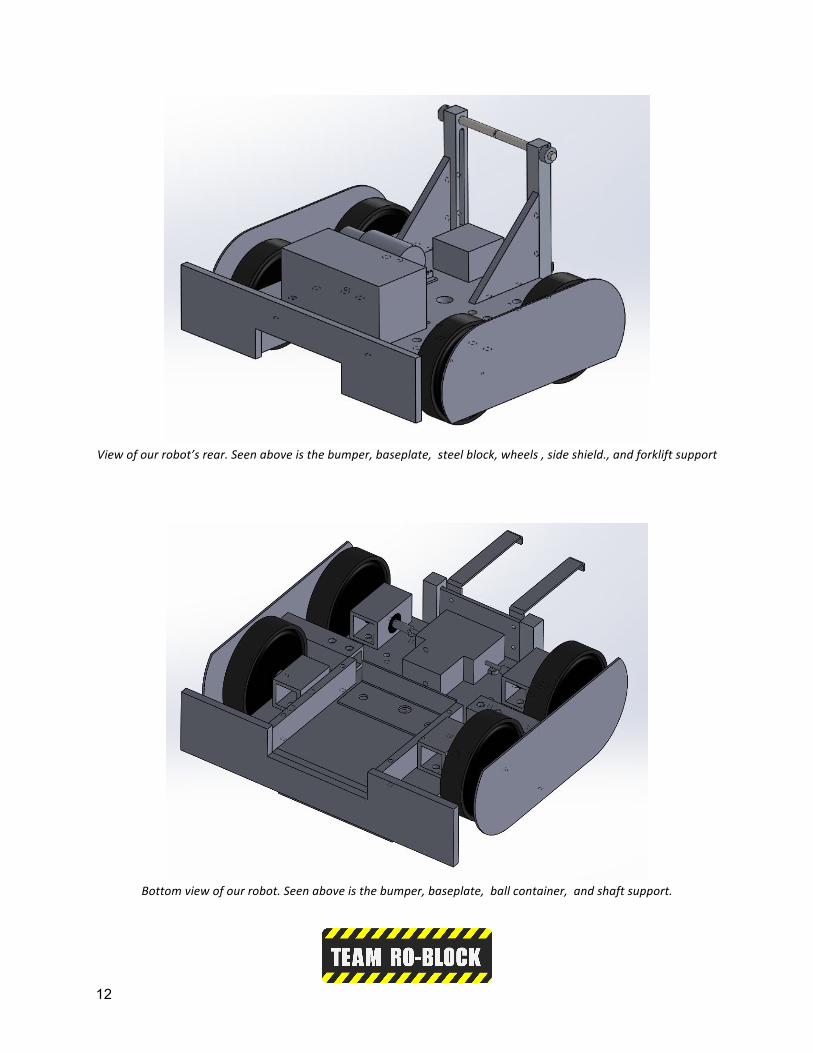
Design changes from our final sketch to our solid model include: pulley system for the forklift operation, driving wheels instead of treads, steel block, side shield, and bent forks. We chose the simpler design when deciding to make a pulley system for the forklift, and the wheels. The alternatives: rack and pinion, and treads were more complicated and since we were under a time constraint, we switched the design. The steel block was to add much needed weight to our robot, and bending the forks at the end allowed us to hook onto other robots. The side shields were to protect our robot from other’s bumping into us.
View of our robot’s front. Seen above is the forklift, baseplate, steel block, wheels and side shield.
12
View of our robot’s rear. Seen above is the bumper, baseplate, steel block, wheels , side shield., and forklift support
Bottom view of our robot. Seen above is the bumper, baseplate, ball container, and shaft support.

13
4. PRODUCT MANUFACTURING
4.1 Manufacturing Resource Description
GG Brown Machine Shop: Drill Press, Lathe, Mill, Band Saw, Brake GG Brown Lab: Soldering Iron, various hand tools, fasteners Wilson Student Multidisciplinary Project Center: Mill DH Fab: Welding, Lathe, Mill, Band saw
5. BILL OF MATERIALS
# Description Use Dimensions
(in) Supplier Part # Quantity Other Details Assembly
1 Aluminum Plate 1/8'' thick
Forklift Plate 3.5 x 2 Alro Stock 1 -‐ Forklift
2 Aluminum 1/2'' Square Stock
Vertical Supports 6 Kit 2 -‐ Forklift
3 Steel Shaft 1/4'' diameter Pulley Shaft 4.5 Kit 8893K36 1 -‐ Forklift
4 Stock Fasteners Set Screw #4-‐48 Crib 2
For Shaft Stop Forklift
5 Kevlar Thread -‐ 28lb Tensile,
0.014'' diameter Pulley Thread 15 Crib 8800K41 1 -‐ Forklift
6 Aluminum Round Stock 1/2'' diameter Shaft Stop
0.5 OD, 0.257 ID, 1/4 L Crib Stock 2
Uses set screw Forklift
7 Aluminium Plate, 1/8'' thick Forks 5x0.5 Alro Stock 2
Angle 90 degrees Forklift
8 1/8 Aluminum Rivets
Attaches Forklift + Forklift Plate 1/8 x 1/2 Crib Stock 4 -‐ Forklift
9 Steel Plate 1/4'' thick
Attaches Forklift + Baseplate 2.75 x 2.75 Kit Stock 2 Triangle Forklift
10 Tamiya 72001 Planetary Gearbox Kit
Forklift Motor -‐ Kit 70 1 -‐ Forklift

14
11 Tamiya 70168 Double Gearbox
Kit Driving Motor -‐ Kit 114 1 -‐ Wheel
12 Pololu 1576 99:1 Metal Gearbox -‐ 0.98 x 2.13 Kit 1576 1 -‐
13 Polypropylene Wheels
Driving Wheels
3 Diameter, 1/4 Bore Kit 2781T72 4 -‐ Wheel
14
Aluminum Square Tube Stock, 1''x1'', 1/8'' Wall
Wheel Shaft Support 3 Kit Stock 4 -‐ Wheel
15 Flanged SS Bearing
Wheel Bearings
1/4 ID, 1/2 OD, 1/8 Thick Kit 57155K304 4 $9.16 Wheel
16 Flanged brass bushing
Wheel Bushings 1/4 ID. 3/8 OD Kit 2938T1 4 -‐ Wheel
17 Steel Rod 1/4'' Diameter Wheel Shaft 4 Kit Stock 2 -‐ Wheel
17 Steel Plate 1/4'' thick
Attaches Bumper + Baseplate 4.25 x .88 Kit Stock 2 -‐ Bumper
18 Aluminum Plate 1/4'' thick Bumper 8 x 2 Kit Stock 1 -‐ Bumper
19 Aluminum Plate 1/16'' thick
Ball Container 4 x 2 Kit Stock 3
Angle 90 degrees
Ball Container
20 Acrylic Plate 1/4'' Baseplate 8 x 8 Kit Stock 1 -‐ Baseplate
21 Stock Fasteners
Attaches Elements to Baseplate -‐ Crib Stock as needed -‐
-‐
6. PROTOTYPE TESTING
6.1 Preliminary Test Results
Upon testing our robot on the arena for the first time, we discovered a few small flaws in our robot’s design. Our robot would tip over forward when we used the forklift to lift a heavy object. This issue was due to the fact that our robot was very light at first (about 3.5 lbs) and that the weight was not distributed properly. Lifting a heavy robot would add a relatively
15
significant amount of weight to the front of our robot, and the entire chassis would then pivot on the front wheels due to the increased moment. We also experienced trouble with having the lifted robot slide off of the metal forks. This was caused by the smoothness of the material (aluminum) that we used to make our forks. Trying to manipulate other robots became difficult since our forks did not have enough friction to hold onto them. 6.2 Redesign Based on Preliminary Tests
To correct our robot’s weight issue, we decided to fabricate two weights to add to the chassis. We added a large weight to the back of the robot to prevent it from tipping forward when we lifted heavy robots. We also included a smaller weight to the front of the robot to maintain weight over our front wheels, since these are the driven wheels and they must stay on the ground in order to drive properly. This was a simple fix because we attached steel blocks with velcro to the base plate. We solved the slippage problem of our forks by adding rubber strips to the top surfaces. This gave our forklift the extra friction that it needed in order to maintain control of other robots. This was another quick design improvement because we only needed epoxy to attach the rubber strips to the aluminum forks. We tested our robot on the arena again, and this time it was successful. We lifted several different heavy robots without tipping or losing hold of them. The results of our quick additions were positive, and they solved the issues that we had when we tested it on the arena beforehand. 6.3 Discussion of Competition Results
At the M-‐Ball competition, our team’s robot functioned properly and we performed very well. All of our motors ran smoothly, and the robot drove without any hiccups. Our forklift succeeded in lifting and manipulating several of our opponents. We prevented the other squad’s main offensive robot from scoring by lifting its wheels off of the table and dragging it away from the scoring hole. We also lifted an opponent from our squad’s scoring hole because it was preventing our teammates from scoring balls. In the end, we successfully performed our role as the defensive robot of the squad.

16
Unfortunately, our squad lost our first match, so we were not able to continue playing defense in the competition. Our squad’s strategy was not successful since some of our squad’s robots encountered mechanical and electrical problems during the match. Our overall squad performance could have been improved if we would have had two offensive robots scoring balls instead of one. We succeeded in preventing the other squad from scoring a high number of balls; however, our squad scored fewer points.
7. DISCUSSION AND RECOMMENDATIONS 7.1 Project Summary At the beginning of the semester, we were divided into 8 squads with 4 teams in each squad. We were first asked to come up with our own squad strategies. After discussion within the squad, our team was assigned to be the defensive robot to stop opponents from scoring. Within our team, we came up with different concepts and designs for our machine, and chose the one we thought would be the best. We did this by discussion and evaluation of each concept by using the concept selection chart. We concluded that a bot with a combination of forklift, bumper, and ball container was to be our final design. We calculated and analyzed the necessary torque, speed, and traction to perform our task. We also created a CAD solid model for our initial design. After presenting our design to the squad we refined our design to come up with a detailed design for the forklift, which is the most critical part of our robot. After we finalized the design of our forklift, we began manufacturing. During the manufacturing process, we changed and adjusted a few details. For example, during the manufacturing and assembly process, two non-‐driving wheels could not rotate because the shaft was sticking, so we have to turn the shaft down by 0.01’’ and grease it. After about three weeks of manufacturing, we completed our machine. Our completed robot functioned properly: it lifted a 15 lb robot, moved around the arena, scored balls, and could push other robots. At the competition, we were able to effectively play defense by manipulating two robots, by using the forklift and dragging them around the arena. Our robot performed very well, but unfortunately our squad was not able to score enough points. Reflecting on our design and strategy, we would have liked to have more robots that could score ground balls, as we were unable to keep up with the other team. Also we would have another defensive robot similar to our design that could lift the other team. The best aspect of our design was our forklift as it was able to lift anything on the arena. The worst aspect of our design was our wheels, which would have been better if we used treads.

17
7.2. Future project idea Upon completing this project, we have gained experience and knowledge to help us in future projects and classes. Designing this machine, especially the forklift, will translate well into our projects for ME 350 and 450. We have learned design and manufacturing techniques that will help us in future courses, projects, and in industry.
8. REFERENCES Chris Lindstrom, How to Write A Problem Statement. Retrieved from http://www.ceptara.com/blog/how-‐to-‐write-‐problem-‐statement 9. ACKNOWLEDGEMENTS We would like to thank the University of Michigan faculty who helped us complete our project, especially: Professor Panos Papalambros and Mike Umbriac for their lectures, advice, and organization of the M-‐Ball competition. Bobby Eastman for his hands on help and advice during lab hours. Bob Coury and Mark Stock for their instruction in operating machining equipment. Toby Donajkowski, and our guest lecturers.

18
APPENDICES A. STRATEGIES A.1 Stephen’s Strategy
Figure A.1: 3 offensive robots (1 basket scoring, 1 ball retrieving, 1 hole scoring) and 1 defensive robot
A.2 Kevin’s Strategy
Figure A.2: 3 offensive robots (1 basket scoring, 2 hole scoring) and 1 defensive robot
A.3 David’s Strategy
Figure A.3: 4 Defensive robots (2 Basket, 1 Wolverine and 1 Tower defense)

19
A.4 Chi’s Strategy
Figure A.4: 2 offensive robots (1 basket scoring, 1 hole scoring) and 2 defensive robots (1 basket and 1 hole).
B. CONCEPT SKETCHES B.1 Stephen’s Concept Sketch
Figure B.1: Has ball container, wheels, and bumper.
B.2 Kevin’s Concept Sketch
Figure B.2: Has ball container, bumper, forklift, and tank treads.

20
B.3 David’s Concept Sketch
Figure B.3: Has bumper, tank treads, forklift, and protective enclosure.
B.4 Chi’s Concept Sketch
Figure B.4: Has ramps surrounding robot, and wheels.
C. DIMENSIONED DRAWINGS AND MANUFACTURING PLANS The following pages contain our engineering drawings and manufacturing plans. C.1 Dimensioned Drawings of Individual Parts

4.13
2.000 STK
2.000 STK
DO NOT SCALE DRAWING
Back Weight
SHEET 1 OF 1
Steve Barch
UNLESS OTHERWISE SPECIFIED:
SCALE: 1:2 WEIGHT:
REVDWG. NO.
ASIZE
TITLE:
NAME DATE
COMMENTS:
Q.A.
MFG APPR.
ENG APPR.
CHECKED
DRAWN
FINISH
MATERIAL
INTERPRET GEOMETRICTOLERANCING PER:
DIMENSIONS ARE IN INCHESTOLERANCES:FRACTIONALANGULAR: MACH BEND TWO PLACE DECIMAL .02THREE PLACE DECIMAL .005
APPLICATION
USED ONNEXT ASSY
PROPRIETARY AND CONFIDENTIALTHE INFORMATION CONTAINED IN THISDRAWING IS THE SOLE PROPERTY OF<INSERT COMPANY NAME HERE>. ANY REPRODUCTION IN PART OR AS A WHOLEWITHOUT THE WRITTEN PERMISSION OF<INSERT COMPANY NAME HERE> IS PROHIBITED.
5 4 3 2 1
Steel
12/10/13
SolidWorks Student Edition. For Academic Use Only.

.500 1.875
1.000
2.500 3.500 3.725
4.475
4.550
1.575
5.675
5.969
1.250
6.825 6.925
.375 .750 1.438
.625
1.500 1.273
1.945
.625
2.250 2.194
2.188
14X .266
6X .134
.500
8X .177
.250 STK 6.750
7.675
DO NOT SCALE DRAWING
Base Plate
SHEET 1 OF 1
12/9/13Steve Barch
UNLESS OTHERWISE SPECIFIED:
SCALE: 2:5 WEIGHT:
REVDWG. NO.
ASIZE
TITLE:
NAME DATE
COMMENTS:
Q.A.
MFG APPR.
ENG APPR.
CHECKED
DRAWN
FINISH
MATERIAL
INTERPRET GEOMETRICTOLERANCING PER:
DIMENSIONS ARE IN INCHESTOLERANCES:FRACTIONALANGULAR: MACH BEND THREE PLACE DECIMAL .005
APPLICATION
USED ONNEXT ASSY
PROPRIETARY AND CONFIDENTIALTHE INFORMATION CONTAINED IN THISDRAWING IS THE SOLE PROPERTY OF<INSERT COMPANY NAME HERE>. ANY REPRODUCTION IN PART OR AS A WHOLEWITHOUT THE WRITTEN PERMISSION OF<INSERT COMPANY NAME HERE> IS PROHIBITED.
5 4 3 2 1
AcrylicSolidWorks Educational Edition. For Instructional Use Only.

1.75
1.000 STK
.45
.88 .624
1.000 STK
.125 STK
.125 STK
.125 STK .125 STK
1.25 .25
2X 1/4-20 Tapped Hole
.50
DO NOT SCALE DRAWING
Bearing Block
SHEET 1 OF 1
11/18/13CQ
UNLESS OTHERWISE SPECIFIED:
SCALE: 1:1 WEIGHT:
REVDWG. NO.
ASIZE
TITLE:
NAME DATE
COMMENTS:
Q.A.
MFG APPR.
ENG APPR.
CHECKED
DRAWN
AluminumFINISH
MATERIAL
INTERPRET GEOMETRICTOLERANCING PER:
DIMENSIONS ARE IN INCHESTOLERANCES:FRACTIONALANGULAR: MACH BEND TWO PLACE DECIMAL 0.02THREE PLACE DECIMAL 0.005
APPLICATION
USED ONNEXT ASSY
PROPRIETARY AND CONFIDENTIALTHE INFORMATION CONTAINED IN THISDRAWING IS THE SOLE PROPERTY OF<INSERT COMPANY NAME HERE>. ANY REPRODUCTION IN PART OR AS A WHOLEWITHOUT THE WRITTEN PERMISSION OF<INSERT COMPANY NAME HERE> IS PROHIBITED.
5 4 3 2 1
SolidWorks Student Edition. For Academic Use Only.

R.09 90 Bend
.063 STK
1.31
.50
1.53
2.38
.38
2X .27
.63
.85
3.38
.81
DO NOT SCALE DRAWING
Bottom Wall C
SHEET 1 OF 1
12/10/13Steve Barch
UNLESS OTHERWISE SPECIFIED:
SCALE 4:5 WEIGHT:
REVDWG. NO.
ASIZE
TITLE:
NAME DATE
COMMENTS:
Q.A.
MFG APPR.
ENG APPR.
CHECKED
DRAWN
AluminumFINISH
MATERIAL
INTERPRET GEOMETRICTOLERANCING PER:
DIMENSIONS ARE IN INCHESTOLERANCES:FRACTIONALANGULAR: MACH BEND TWO PLACE DECIMAL .02THREE PLACE DECIMAL .005
APPLICATION
USED ONNEXT ASSY
PROPRIETARY AND CONFIDENTIALTHE INFORMATION CONTAINED IN THISDRAWING IS THE SOLE PROPERTY OF<INSERT COMPANY NAME HERE>. ANY REPRODUCTION IN PART OR AS A WHOLEWITHOUT THE WRITTEN PERMISSION OF<INSERT COMPANY NAME HERE> IS PROHIBITED.
5 4 3 2 1
SolidWorks Student Edition. For Academic Use Only.

1.00
3.63 3.13
9.88
0.250 STK
2.13
DO NOT SCALE DRAWING
Bumper Plate
SHEET 1 OF 1
11/18/13SteveBarch
UNLESS OTHERWISE SPECIFIED:
SCALE: 1:2 WEIGHT:
REVDWG. NO.
ASIZE
TITLE:
NAME DATE
COMMENTS:
Q.A.
MFG APPR.
ENG APPR.
CHECKED
DRAWN
FINISH
MATERIAL
INTERPRET GEOMETRICTOLERANCING PER:
DIMENSIONS ARE IN INCHESTOLERANCES:FRACTIONALANGULAR: MACH BEND TWO PLACE DECIMAL .02THREE PLACE DECIMAL .005
APPLICATION
USED ONNEXT ASSY
PROPRIETARY AND CONFIDENTIALTHE INFORMATION CONTAINED IN THISDRAWING IS THE SOLE PROPERTY OF<INSERT COMPANY NAME HERE>. ANY REPRODUCTION IN PART OR AS A WHOLEWITHOUT THE WRITTEN PERMISSION OF<INSERT COMPANY NAME HERE> IS PROHIBITED.
5 4 3 2 1
AluminumSolidWorks Educational Edition. For Instructional Use Only.

4.25
.88
.75 3.00
.125
2X #8-32 Tapped Hole
.250 STK
DO NOT SCALE DRAWING
Bumper Support
SHEET 1 OF 1
12/10/13Steve Barch
UNLESS OTHERWISE SPECIFIED:
SCALE: 1:1 WEIGHT:
REVDWG. NO.
ASIZE
TITLE:
NAME DATE
COMMENTS:
Q.A.
MFG APPR.
ENG APPR.
CHECKED
DRAWN
AluminumFINISH
MATERIAL
INTERPRET GEOMETRICTOLERANCING PER:
DIMENSIONS ARE IN INCHESTOLERANCES:FRACTIONALANGULAR: MACH BEND TWO PLACE DECIMAL .02THREE PLACE DECIMAL .005
APPLICATION
USED ONNEXT ASSY
PROPRIETARY AND CONFIDENTIALTHE INFORMATION CONTAINED IN THISDRAWING IS THE SOLE PROPERTY OF<INSERT COMPANY NAME HERE>. ANY REPRODUCTION IN PART OR AS A WHOLEWITHOUT THE WRITTEN PERMISSION OF<INSERT COMPANY NAME HERE> IS PROHIBITED.
5 4 3 2 1
SolidWorks Student Edition. For Academic Use Only.

.500 STK
.257
.25
.13
.25
#4-48 Tapped Hole
DO NOT SCALE DRAWING
Coupling
SHEET 1 OF 1
11/18/13CQ
UNLESS OTHERWISE SPECIFIED:
SCALE: 1:1 WEIGHT:
REVDWG. NO.
ASIZE
TITLE:
NAME DATE
COMMENTS:
Q.A.
MFG APPR.
ENG APPR.
CHECKED
DRAWN
AluminumFINISH
MATERIAL
INTERPRET GEOMETRICTOLERANCING PER:
DIMENSIONS ARE IN INCHESTOLERANCES:FRACTIONALANGULAR: MACH BEND TWO PLACE DECIMAL 0.02THREE PLACE DECIMAL 0.005
APPLICATION
USED ONNEXT ASSY
PROPRIETARY AND CONFIDENTIALTHE INFORMATION CONTAINED IN THISDRAWING IS THE SOLE PROPERTY OF<INSERT COMPANY NAME HERE>. ANY REPRODUCTION IN PART OR AS A WHOLEWITHOUT THE WRITTEN PERMISSION OF<INSERT COMPANY NAME HERE> IS PROHIBITED.
5 4 3 2 1
SolidWorks Educational Edition. For Instructional Use Only.

1.47
2.94
0.063 STK
0.31
2X R0.09 90 Bends
2 X 0.125
0.75
0.25
0.56
1.56
0.50
3.13
DO NOT SCALE DRAWING
ForkSHEET 1 OF 1
11/3/13
11/3/13Stephen
Chi Qiu
UNLESS OTHERWISE SPECIFIED:
SCALE: 1:2 WEIGHT:
REVDWG. NO.
ASIZE
TITLE:
Fork
NAME DATE
COMMENTS:
Q.A.
MFG APPR.
ENG APPR.
CHECKED
DRAWN
FINISH
MATERIAL
Aluminum
INTERPRET GEOMETRICTOLERANCING PER:
DIMENSIONS ARE IN INCHESTOLERANCES:FRACTIONALANGULAR: MACH BEND TWO PLACE DECIMAL 0.02THREE PLACE DECIMAL 0.005
APPLICATION
USED ONNEXT ASSY
PROPRIETARY AND CONFIDENTIALTHE INFORMATION CONTAINED IN THISDRAWING IS THE SOLE PROPERTY OF<INSERT COMPANY NAME HERE>. ANY REPRODUCTION IN PART OR AS A WHOLEWITHOUT THE WRITTEN PERMISSION OF<INSERT COMPANY NAME HERE> IS PROHIBITED.
5 4 3 2 1
SolidWorks Student Edition. For Academic Use Only.

2.25
45.00°
AA
2.75
.250 STK
.75
1.25
.125
.75 1.25 .125
SECTION A-A4X #8-32 Tapped Hole 0.50" Deep
DO NOT SCALE DRAWING
Forklift Support A
SHEET 1 OF 1
12/10/13Steve Barch
UNLESS OTHERWISE SPECIFIED:
SCALE: 1:1 WEIGHT:
REVDWG. NO.
ASIZE
TITLE:
NAME DATE
COMMENTS:
Q.A.
MFG APPR.
ENG APPR.
CHECKED
DRAWN
AluminumFINISH
MATERIAL
INTERPRET GEOMETRICTOLERANCING PER:
DIMENSIONS ARE IN INCHESTOLERANCES:FRACTIONALANGULAR: MACH BEND TWO PLACE DECIMAL .02THREE PLACE DECIMAL .005
APPLICATION
USED ONNEXT ASSY
PROPRIETARY AND CONFIDENTIALTHE INFORMATION CONTAINED IN THISDRAWING IS THE SOLE PROPERTY OF<INSERT COMPANY NAME HERE>. ANY REPRODUCTION IN PART OR AS A WHOLEWITHOUT THE WRITTEN PERMISSION OF<INSERT COMPANY NAME HERE> IS PROHIBITED.
5 4 3 2 1
SolidWorks Student Edition. For Academic Use Only.

45.00°
BB
.75
1.25 2.75
.250 STK
.125
.75 1.25 .125
4X #8-32 Tapped Hole 0.50" DeepSECTION B-B
DO NOT SCALE DRAWING
Forklift Support B
SHEET 1 OF 1
12/10/13Steve Barch
UNLESS OTHERWISE SPECIFIED:
SCALE: 1:1 WEIGHT:
REVDWG. NO.
ASIZE
TITLE:
NAME DATE
COMMENTS:
Q.A.
MFG APPR.
ENG APPR.
CHECKED
DRAWN
AluminumFINISH
MATERIAL
INTERPRET GEOMETRICTOLERANCING PER:
DIMENSIONS ARE IN INCHESTOLERANCES:FRACTIONALANGULAR: MACH BEND TWO PLACE DECIMAL .02THREE PLACE DECIMAL .005
APPLICATION
USED ONNEXT ASSY
PROPRIETARY AND CONFIDENTIALTHE INFORMATION CONTAINED IN THISDRAWING IS THE SOLE PROPERTY OF<INSERT COMPANY NAME HERE>. ANY REPRODUCTION IN PART OR AS A WHOLEWITHOUT THE WRITTEN PERMISSION OF<INSERT COMPANY NAME HERE> IS PROHIBITED.
5 4 3 2 1
SolidWorks Student Edition. For Academic Use Only.

1.500 STK
1.00
1.500 STK
DO NOT SCALE DRAWING
Front Weight
SHEET 1 OF 1
12/10/13Steve Barch
UNLESS OTHERWISE SPECIFIED:
SCALE: 1:1 WEIGHT:
REVDWG. NO.
ASIZE
TITLE:
NAME DATE
COMMENTS:
Q.A.
MFG APPR.
ENG APPR.
CHECKED
DRAWN
SteelFINISH
MATERIAL
INTERPRET GEOMETRICTOLERANCING PER:
DIMENSIONS ARE IN INCHESTOLERANCES:FRACTIONALANGULAR: MACH BEND TWO PLACE DECIMAL .02THREE PLACE DECIMAL .005
APPLICATION
USED ONNEXT ASSY
PROPRIETARY AND CONFIDENTIALTHE INFORMATION CONTAINED IN THISDRAWING IS THE SOLE PROPERTY OF<INSERT COMPANY NAME HERE>. ANY REPRODUCTION IN PART OR AS A WHOLEWITHOUT THE WRITTEN PERMISSION OF<INSERT COMPANY NAME HERE> IS PROHIBITED.
5 4 3 2 1
SolidWorks Student Edition. For Academic Use Only.

.25
.75
.62
2.88
1.75
.25
4X .125
3.50
.05
4X R.1
2.00
.125 STK
DO NOT SCALE DRAWING
Plate
SHEET 1 OF 1
12/10/13Steve Barch
UNLESS OTHERWISE SPECIFIED:
SCALE: 1:1 WEIGHT:
REVDWG. NO.
ASIZE
TITLE:
NAME DATE
COMMENTS:
Q.A.
MFG APPR.
ENG APPR.
CHECKED
DRAWN
AluminumFINISH
MATERIAL
INTERPRET GEOMETRICTOLERANCING PER:
DIMENSIONS ARE IN INCHESTOLERANCES:FRACTIONALANGULAR: MACH BEND ONE PLACE DECIMAL .05TWO PLACE DECIMAL .02THREE PLACE DECIMAL .005
APPLICATION
USED ONNEXT ASSY
PROPRIETARY AND CONFIDENTIALTHE INFORMATION CONTAINED IN THISDRAWING IS THE SOLE PROPERTY OF<INSERT COMPANY NAME HERE>. ANY REPRODUCTION IN PART OR AS A WHOLEWITHOUT THE WRITTEN PERMISSION OF<INSERT COMPANY NAME HERE> IS PROHIBITED.
5 4 3 2 1
SolidWorks Student Edition. For Academic Use Only.

2.35 0.06
4.75
BB
0.250 STK
0.03
SECTION B-B
DO NOT SCALE DRAWING
Pulley ShaftSHEET 1 OF 1
11/3/13
11/3/13Stephen
Chi Qiu
UNLESS OTHERWISE SPECIFIED:
SCALE: 1:1 WEIGHT:
REVDWG. NO.
ASIZE
TITLE:
Pulley Shaft
NAME DATE
COMMENTS:
Q.A.
MFG APPR.
ENG APPR.
CHECKED
DRAWN
FINISH
MATERIAL
Steel
INTERPRET GEOMETRICTOLERANCING PER:
DIMENSIONS ARE IN INCHESTOLERANCES:FRACTIONALANGULAR: MACH BEND TWO PLACE DECIMAL 0.02THREE PLACE DECIMAL .005
APPLICATION
USED ONNEXT ASSY
PROPRIETARY AND CONFIDENTIALTHE INFORMATION CONTAINED IN THISDRAWING IS THE SOLE PROPERTY OF<INSERT COMPANY NAME HERE>. ANY REPRODUCTION IN PART OR AS A WHOLEWITHOUT THE WRITTEN PERMISSION OF<INSERT COMPANY NAME HERE> IS PROHIBITED.
5 4 3 2 1
SolidWorks Student Edition. For Academic Use Only.

9.550
.750
.063 STK
DO NOT SCALE DRAWING
Rubber Strip(Wheel)
SHEET 1 OF 1
12/10/13Steve Barch
UNLESS OTHERWISE SPECIFIED:
SCALE: 1:2 WEIGHT:
REVDWG. NO.
ASIZE
TITLE:
NAME DATE
COMMENTS:
Q.A.
MFG APPR.
ENG APPR.
CHECKED
DRAWN
RubberFINISH
MATERIAL
INTERPRET GEOMETRICTOLERANCING PER:
DIMENSIONS ARE IN INCHESTOLERANCES:FRACTIONALANGULAR: MACH BEND THREE PLACE DECIMAL .005
APPLICATION
USED ONNEXT ASSY
PROPRIETARY AND CONFIDENTIALTHE INFORMATION CONTAINED IN THISDRAWING IS THE SOLE PROPERTY OF<INSERT COMPANY NAME HERE>. ANY REPRODUCTION IN PART OR AS A WHOLEWITHOUT THE WRITTEN PERMISSION OF<INSERT COMPANY NAME HERE> IS PROHIBITED.
5 4 3 2 1
SolidWorks Student Edition. For Academic Use Only.

2.63
AA .250 STK
SECTION A-A
DO NOT SCALE DRAWING
Shaft (Back Wheel)
SHEET 1 OF 1
12/10/13Steve Barch
UNLESS OTHERWISE SPECIFIED:
SCALE: 1:1 WEIGHT:
REVDWG. NO.
ASIZE
TITLE:
NAME DATE
COMMENTS:
Q.A.
MFG APPR.
ENG APPR.
CHECKED
DRAWN
SteelFINISH
MATERIAL
INTERPRET GEOMETRICTOLERANCING PER:
DIMENSIONS ARE IN INCHESTOLERANCES:FRACTIONALANGULAR: MACH BEND TWO PLACE DECIMAL .02THREE PLACE DECIMAL .005
APPLICATION
USED ONNEXT ASSY
PROPRIETARY AND CONFIDENTIALTHE INFORMATION CONTAINED IN THISDRAWING IS THE SOLE PROPERTY OF<INSERT COMPANY NAME HERE>. ANY REPRODUCTION IN PART OR AS A WHOLEWITHOUT THE WRITTEN PERMISSION OF<INSERT COMPANY NAME HERE> IS PROHIBITED.
5 4 3 2 1
SolidWorks Educational Edition. For Instructional Use Only.

2.79
1.31 AA
.375 STK
.250 .118
.125
.13
.38
#4-48 Tapped Hole
SECTION A-A
DO NOT SCALE DRAWING
Shaft (Front Wheel)
SHEET 1 OF 1
12/10/13Steve Barch
UNLESS OTHERWISE SPECIFIED:
SCALE: 1:1 WEIGHT:
REVDWG. NO.
ASIZE
TITLE:
NAME DATE
COMMENTS:
Q.A.
MFG APPR.
ENG APPR.
CHECKED
DRAWN
AluminumFINISH
MATERIAL
INTERPRET GEOMETRICTOLERANCING PER:
DIMENSIONS ARE IN INCHESTOLERANCES:FRACTIONALANGULAR: MACH BEND TWO PLACE DECIMAL .02THREE PLACE DECIMAL .005
APPLICATION
USED ONNEXT ASSY
PROPRIETARY AND CONFIDENTIALTHE INFORMATION CONTAINED IN THISDRAWING IS THE SOLE PROPERTY OF<INSERT COMPANY NAME HERE>. ANY REPRODUCTION IN PART OR AS A WHOLEWITHOUT THE WRITTEN PERMISSION OF<INSERT COMPANY NAME HERE> IS PROHIBITED.
5 4 3 2 1
SolidWorks Educational Edition. For Instructional Use Only.

1.50
.75
.55
.249
1.000 STK
.125 STK .125 STK
.125 STK
.125 STK 1.000 STK
.25 1.00
.50
2X 1/4-20 Tapped Hole
DO NOT SCALE DRAWING
Shaft Support
SHEET 1 OF 1
12/10/13Steve Barch
UNLESS OTHERWISE SPECIFIED:
SCALE: 1:1 WEIGHT:
REVDWG. NO.
ASIZE
TITLE:
NAME DATE
COMMENTS:
Q.A.
MFG APPR.
ENG APPR.
CHECKED
DRAWN
AluminumFINISH
MATERIAL
INTERPRET GEOMETRICTOLERANCING PER:
DIMENSIONS ARE IN INCHESTOLERANCES:FRACTIONALANGULAR: MACH BEND TWO PLACE DECIMAL .02THREE PLACE DECIMAL .005
APPLICATION
USED ONNEXT ASSY
PROPRIETARY AND CONFIDENTIALTHE INFORMATION CONTAINED IN THISDRAWING IS THE SOLE PROPERTY OF<INSERT COMPANY NAME HERE>. ANY REPRODUCTION IN PART OR AS A WHOLEWITHOUT THE WRITTEN PERMISSION OF<INSERT COMPANY NAME HERE> IS PROHIBITED.
5 4 3 2 1
SolidWorks Student Edition. For Academic Use Only.

2.75
.25 .63
.38
2X 1/4-20 Tapped Hole
.750 STK
.750 STK
.125 STK .125 STK
.125 STK
.125 STK
DO NOT SCALE DRAWING
Side Shield Support
SHEET 1 OF 1
12/10/13Steve Barch
UNLESS OTHERWISE SPECIFIED:
SCALE: 1:1 WEIGHT:
REVDWG. NO.
ASIZE
TITLE:
NAME DATE
COMMENTS:
Q.A.
MFG APPR.
ENG APPR.
CHECKED
DRAWN
FINISH
MATERIAL
INTERPRET GEOMETRICTOLERANCING PER:
DIMENSIONS ARE IN INCHESTOLERANCES:FRACTIONALANGULAR: MACH BEND TWO PLACE DECIMAL .02THREE PLACE DECIMAL .005
APPLICATION
USED ONNEXT ASSY
PROPRIETARY AND CONFIDENTIALTHE INFORMATION CONTAINED IN THISDRAWING IS THE SOLE PROPERTY OF<INSERT COMPANY NAME HERE>. ANY REPRODUCTION IN PART OR AS A WHOLEWITHOUT THE WRITTEN PERMISSION OF<INSERT COMPANY NAME HERE> IS PROHIBITED.
5 4 3 2 1
AluminumSolidWorks Student Edition. For Academic Use Only.

4.25
2X R1.75
1.75 2.88
7.75
.063 STK
DO NOT SCALE DRAWING
Side Shield
SHEET 1 OF 1
12/10/13Steve Barch
UNLESS OTHERWISE SPECIFIED:
SCALE: 1:2 WEIGHT:
REVDWG. NO.
ASIZE
TITLE:
NAME DATE
COMMENTS:
Q.A.
MFG APPR.
ENG APPR.
CHECKED
DRAWN
AluminumFINISH
MATERIAL
INTERPRET GEOMETRICTOLERANCING PER:
DIMENSIONS ARE IN INCHESTOLERANCES:FRACTIONALANGULAR: MACH BEND TWO PLACE DECIMAL .02THREE PLACE DECIMAL .005
APPLICATION
USED ONNEXT ASSY
PROPRIETARY AND CONFIDENTIALTHE INFORMATION CONTAINED IN THISDRAWING IS THE SOLE PROPERTY OF<INSERT COMPANY NAME HERE>. ANY REPRODUCTION IN PART OR AS A WHOLEWITHOUT THE WRITTEN PERMISSION OF<INSERT COMPANY NAME HERE> IS PROHIBITED.
5 4 3 2 1
SolidWorks Student Edition. For Academic Use Only.

0.251
5.13 0.25 0.25
2X R 0.09
0.25 AA
0.500 STK
0.500 STK
2.25 1.250
0.25
0.38
6.00
2X #8-32 Tapped Hole
SECTION A-A
DO NOT SCALE DRAWING SHEET 1 OF 1
11/3/13
11/3/13Stephen
Chi Qiu
UNLESS OTHERWISE SPECIFIED:
SCALE: 1:2 WEIGHT:
REVDWG. NO.
ASIZE
TITLE:
Square Slot
NAME DATE
COMMENTS:
Q.A.
MFG APPR.
ENG APPR.
CHECKED
DRAWN
AluminumFINISH
MATERIAL
INTERPRET GEOMETRICTOLERANCING PER:
DIMENSIONS ARE IN INCHESTOLERANCES:FRACTIONALANGULAR: MACH BEND TWO PLACE DECIMAL 0.02THREE PLACE DECIMAL 0.005
APPLICATION
USED ONNEXT ASSY
PROPRIETARY AND CONFIDENTIALTHE INFORMATION CONTAINED IN THISDRAWING IS THE SOLE PROPERTY OF<INSERT COMPANY NAME HERE>. ANY REPRODUCTION IN PART OR AS A WHOLEWITHOUT THE WRITTEN PERMISSION OF<INSERT COMPANY NAME HERE> IS PROHIBITED.
5 4 3 2 1
SolidWorks Student Edition. For Academic Use Only.

41
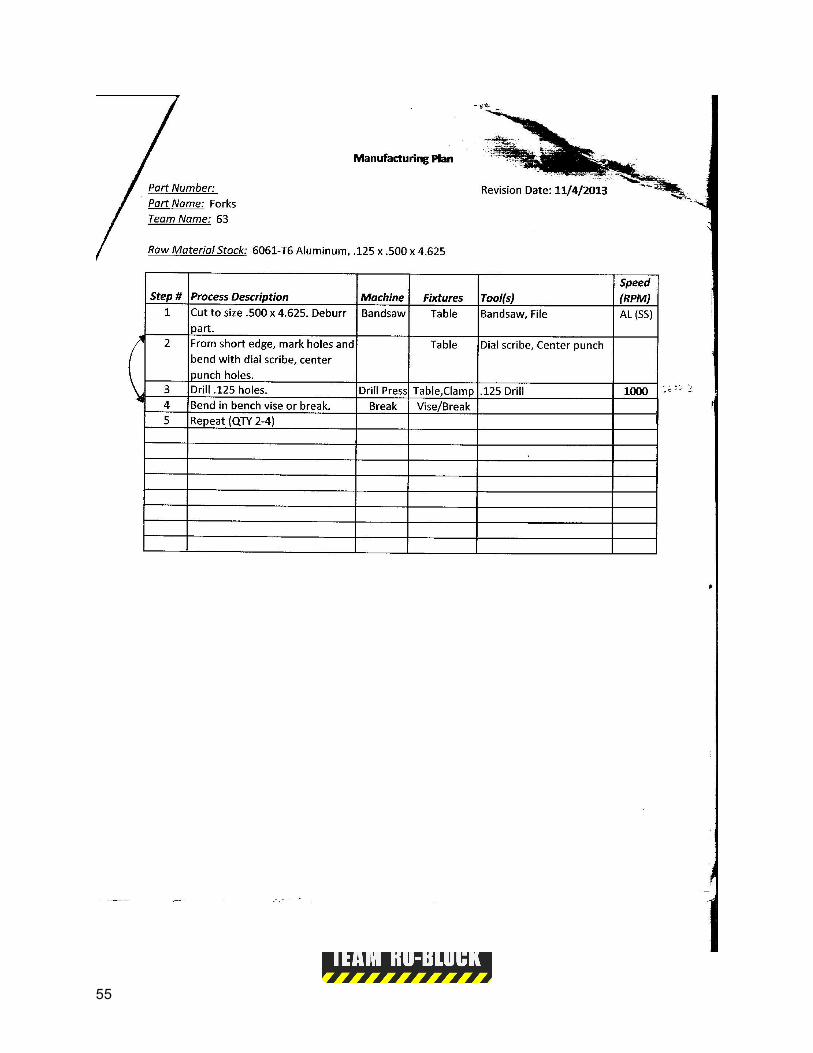
C.2 Manufacturing Plans

42
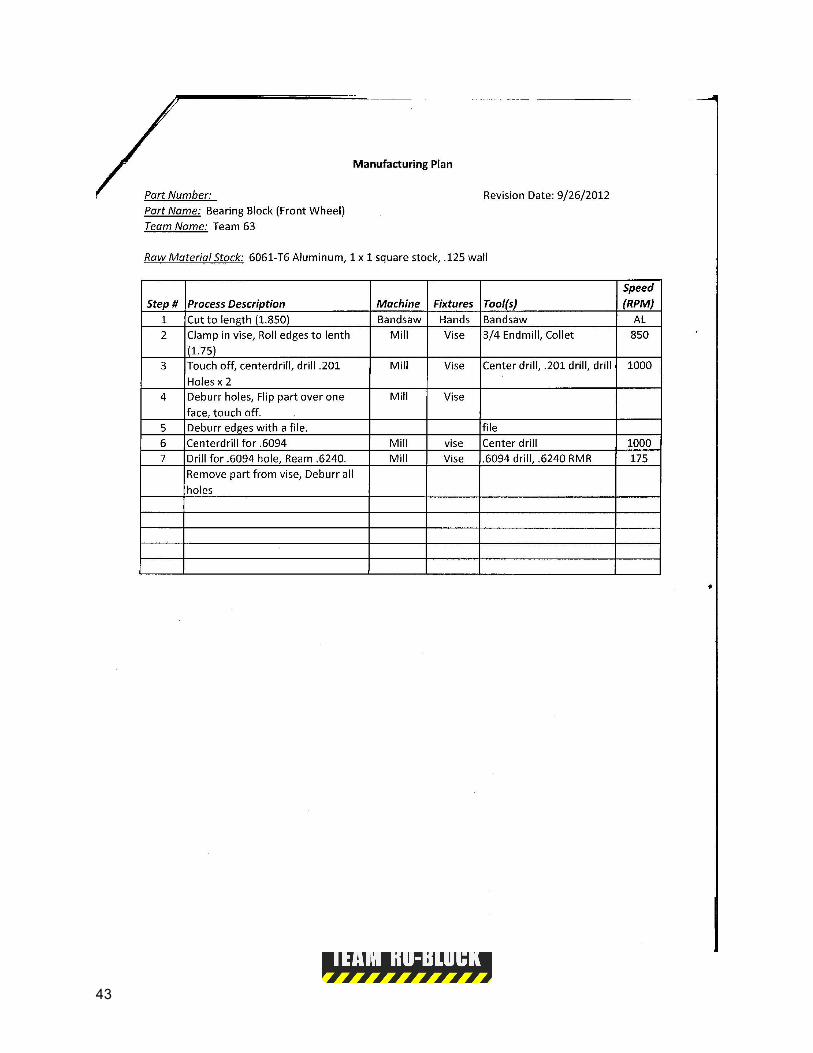
43

44

45

46

47

48

49

50

51

52

53

54
55

56

57

58
D. PURCHASED AND TRADED ITEMS D.1 Purchased Items We purchased: -‐ 4 Flanged SS Bearings from Ebay ($7.90). We needed these bearing for our wheels to operate properly. -‐ ⅛” Aluminum Plate from “DH Fab” ($1.00). We needed this to use as our forklift plate, where we attach the forks using rivets to it. -‐ Steel block from “DH Fab” ($0.65). We needed steel to weigh our machine down and change it’s center of mass so we would not tip over. D.2 Traded Items We traded: -‐ Aluminum Angle Stock ($3.40) with Team 64 for a Buna-‐N sheet ($0.20). We needed the rubber to cover our wheels to increase our traction, and to cover our forklifts to prevent them from slipping off of the robots we’re trying to lift.