Embed Size (px)
Citation preview
Појам ,врста и намена робота.
Конструкција робота.
Роботика
Роботика је наука која :
* се бави конструисањем, производњом и применом робота.
*обухвата области: механике, информатике
и електронике

ПОЈАМ И ВРСТЕ РОБOТА
Појам робот преузет је из романа Р.У.Р. чешког писца Кaрeлa Чepeka.
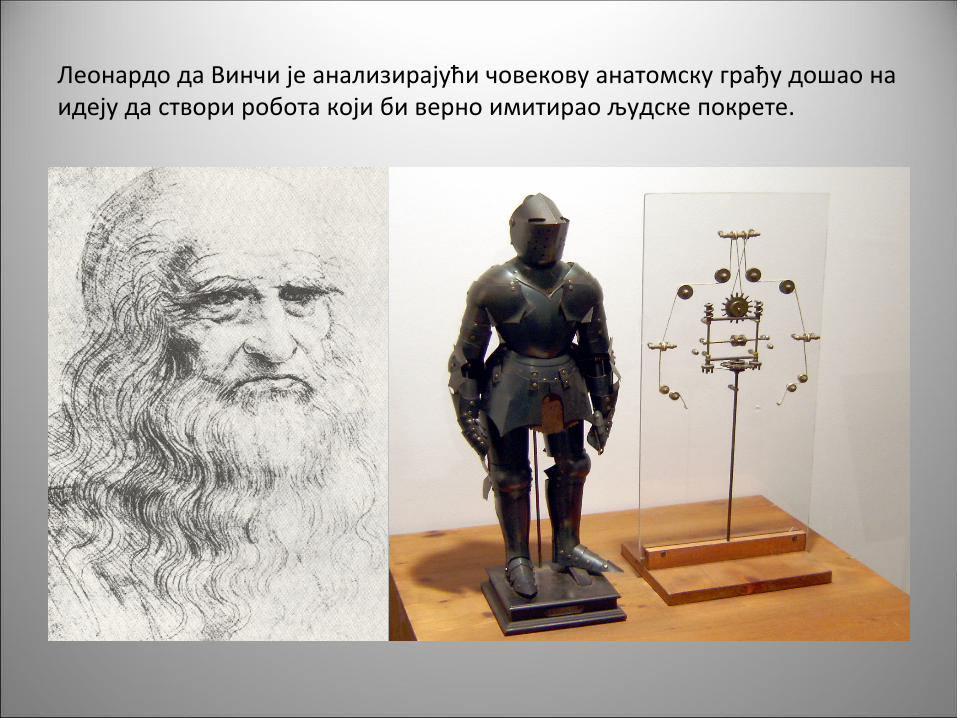
Леонардо да Винчи је анализирајући човекову анатомску грађу дошао на идеју да створи робота који би верно имитирао људске покрете.
Употреба робота
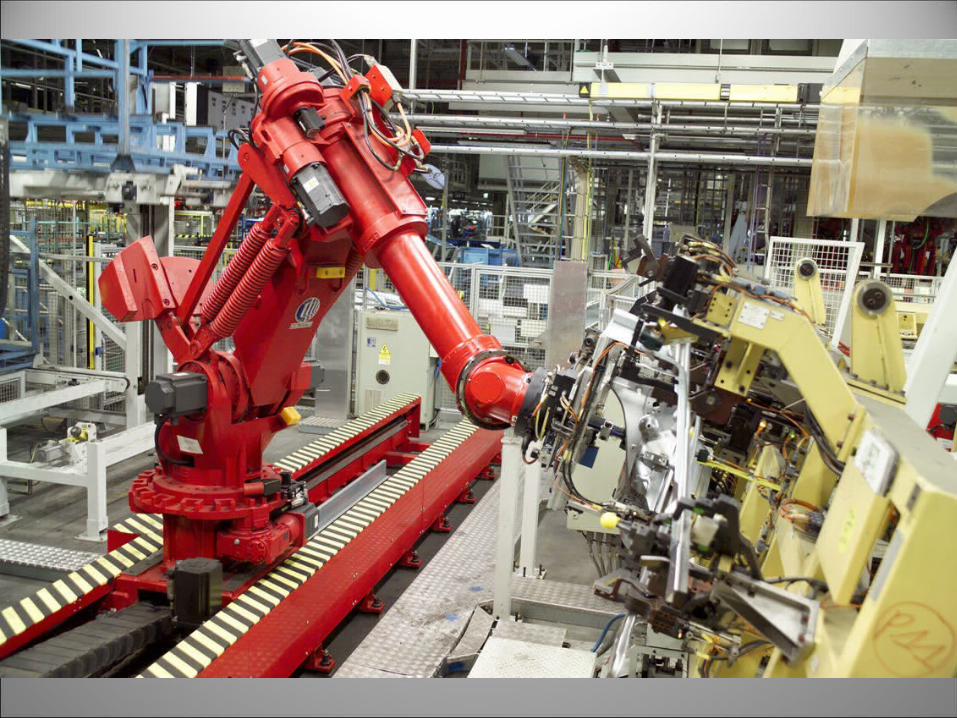
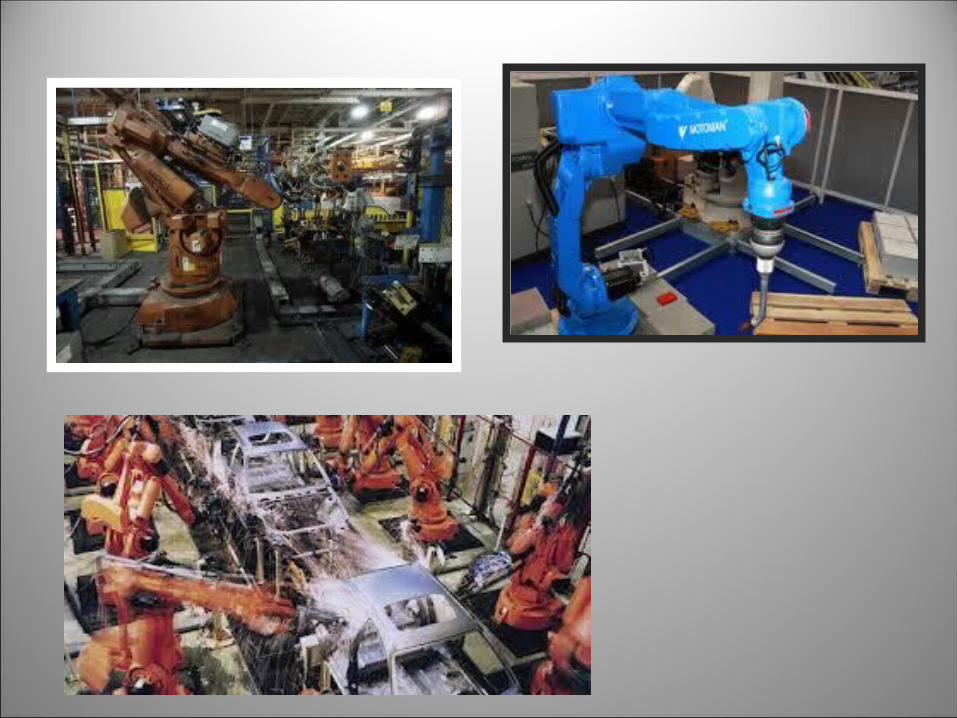
У индустрији, роботи се користе за различите послове:
*опслужују машине
*изводе низове операција у серијској производњи
*спајају делове
*учествују у процесу бојења,…
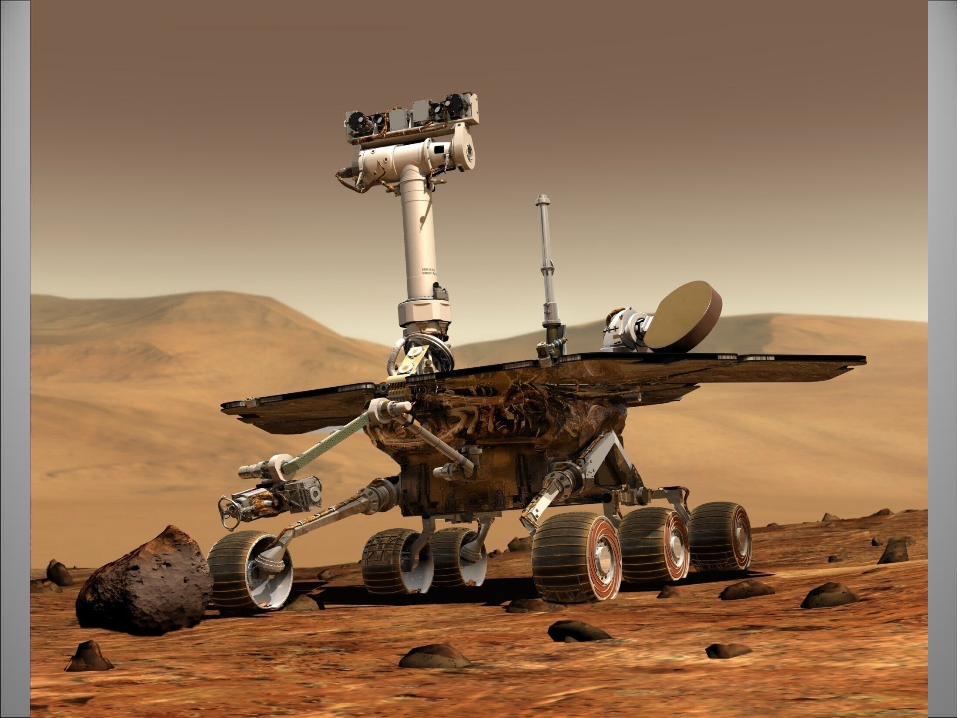
Од посебног је значајa њихова примена за рaд у условима опасним по човека, као што је рад са рaдиоактивним материјалимa.
Роботи су нашли своју примену у* научноистраживачком раду* медицини* пољопривреди* домаћинствуи другим областима људског рада и живота

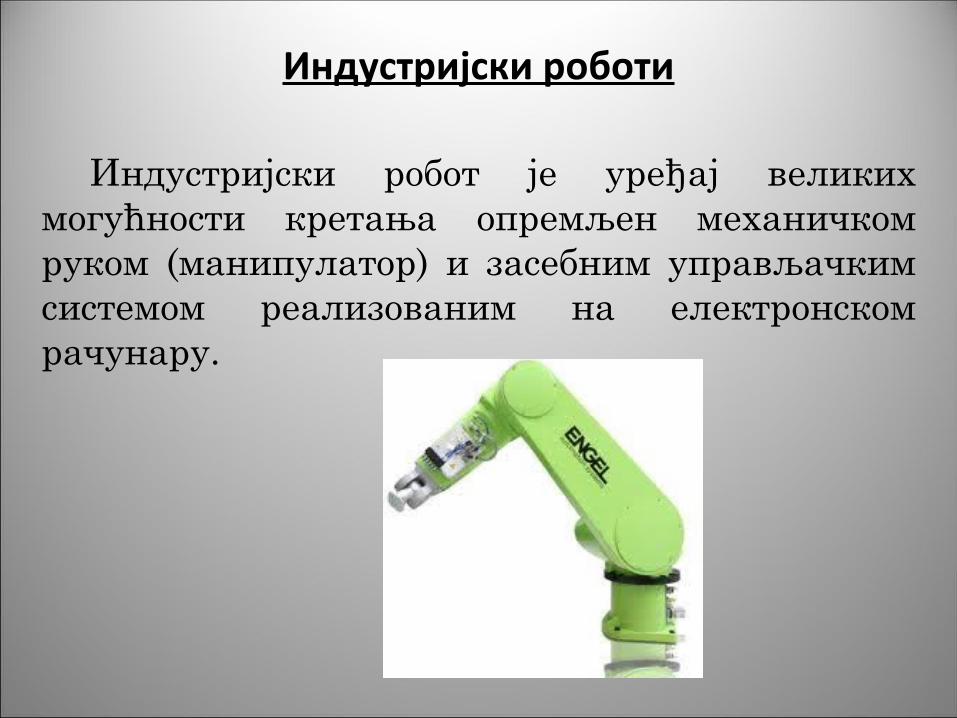
Индустријски робот је уређај великих могућности кретања опремљен механичком руком (манипулатор) и засебним управљачким системом реализованим на електронском рачунару.
Индустријски роботи
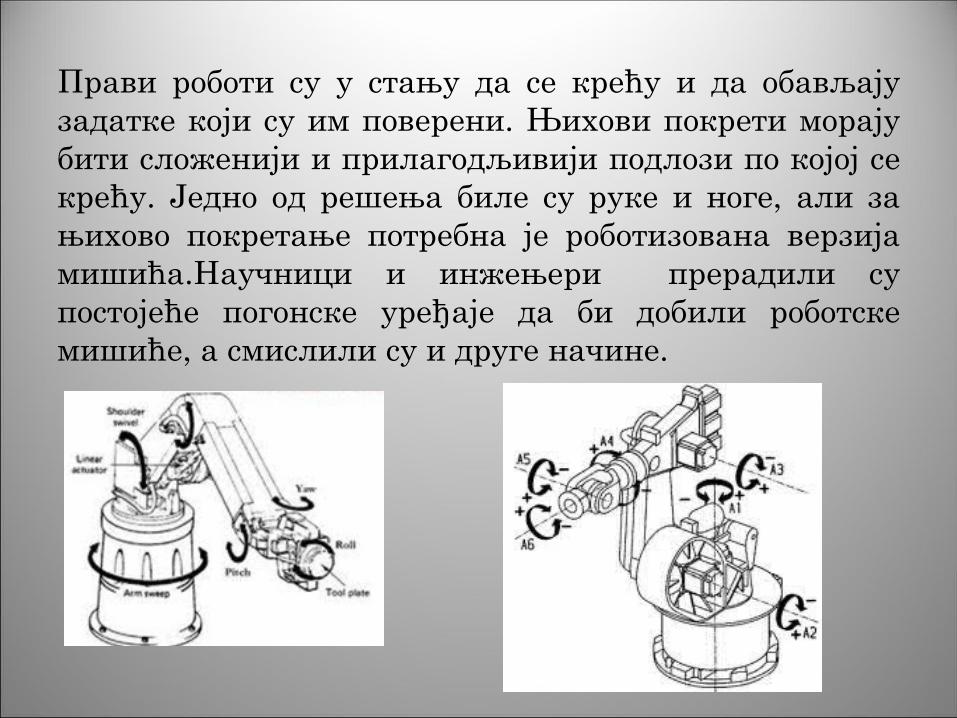
Прави роботи су у стању да се крећу и да обављају задатке који су им поверени. Њихови покрети морају бити сложенији и прилагодљивији подлози по којој се крећу. Једно од решења биле су руке и ноге, али за њихово покретање потребна је роботизована верзија мишића.Научници и инжењери прерадили су постојеће погонске уређаје да би добили роботске мишиће, а смислили су и друге начине.
Механичка основа робота
Робот је састављен из делова који су повезани механичким зглобовима. Таква два узајамно повезана дела која омогућују померање чине кинематски пар. Број слободних – могућих независних кретања назива се степен слободе. Ако повеежмо два дела робота тако да један улази у други, крећући се унутар њега, добијамо кретање звано транслација, а ако се делови окрећу око заједничког зглоба, онда се такво кретање назива ротација. Кинематски ланац представља више међусобно повезаних кинематских парова.
Погон робота
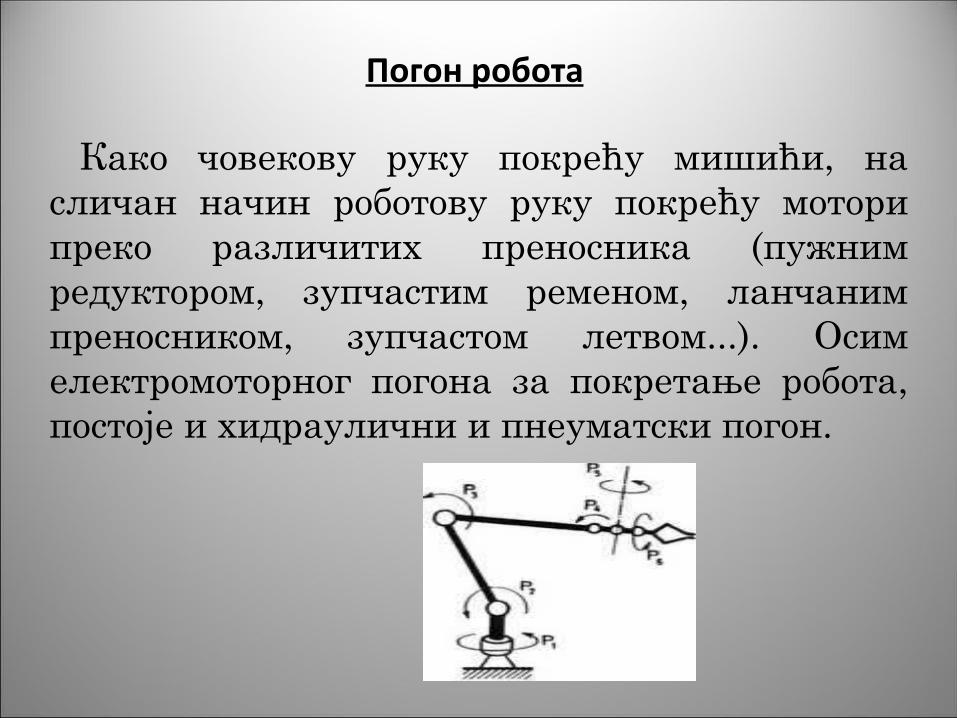
Како човекову руку покрећу мишићи, на сличан начин роботову руку покрећу мотори преко различитих преносника (пужним редуктором, зупчастим ременом, ланчаним преносником, зупчастом летвом...). Осим електромоторног погона за покретање робота, постоје и хидраулични и пнеуматски погон.
Управљање роботима
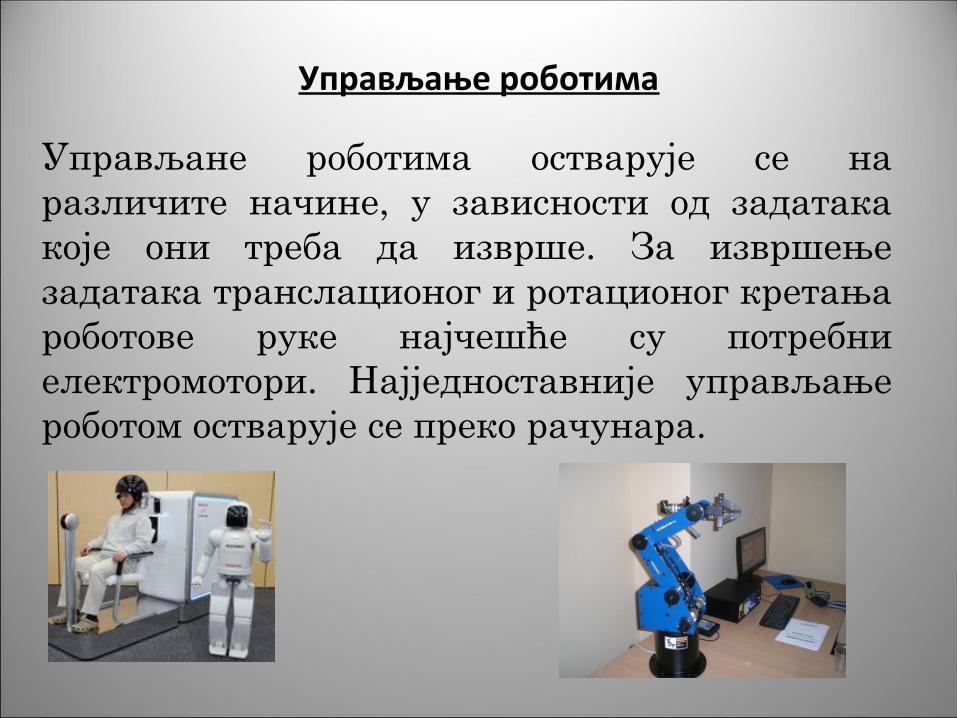
Управљане роботима остварује се на различите начине, у зависности од задатака које они треба да изврше. За извршење задатака транслационог и ротационог кретања роботове руке најчешће су потребни електромотори. Најједноставније управљање роботом остварује се преко рачунара.
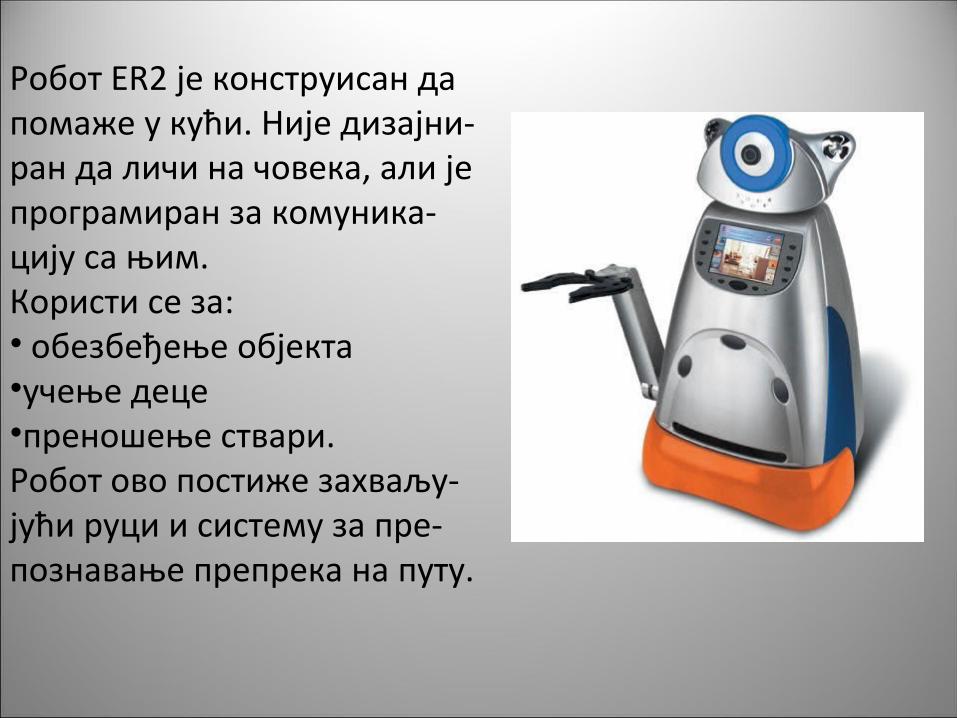
Робoт ER2 је конструисан да помаже у кући. Није дизајни-ран да личи на човека, али је програмиран за комуника-цију са њим.Користи се за:• обезбеђење објекта•учењe дeцe•прeношeњe ствари.Робот овo пoстижe захваљу-јући руци и систeму за прe-пoзнавaњe прeпрека нa путу.
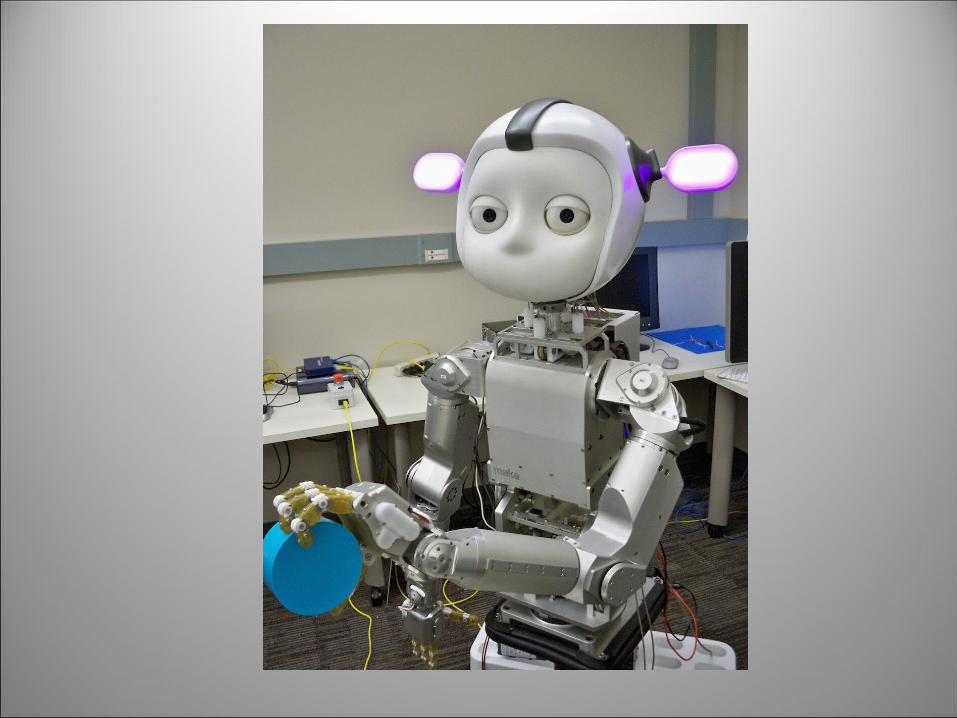
ASIMO је робот такође конструисан за помоћ у кући, али човеколиког изгледа.Има могућност ходања, што је посебан изазов за конструкторе.Највише се користи за:•помоћ старим лицима•послуживање•учење са децом

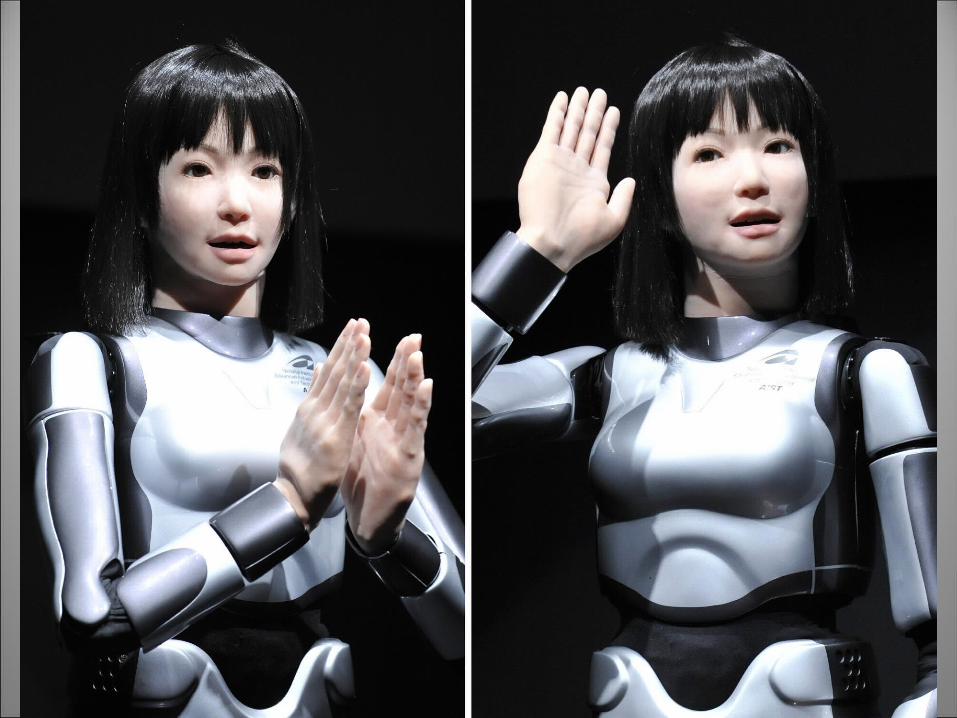
Робот манекенка припада новијој генерацији робота.Осим кретања које је усавршено у односу на претхо-дне моделе, овај робот се изгледом највише прибли-жио човеку.
Пресвучен вештачком кожом, уграђена му је коса и изведена мимика лица-може да се смеши, показује кад је тужан.