Embed Size (px)
Citation preview
Controller Principles
19AEI-406.9

29AEI-406.9
Control System parameters
Control system parameters are
• Error
• Controller output
• Control lag
• Dead time
• Cycling
39AEI-406.9
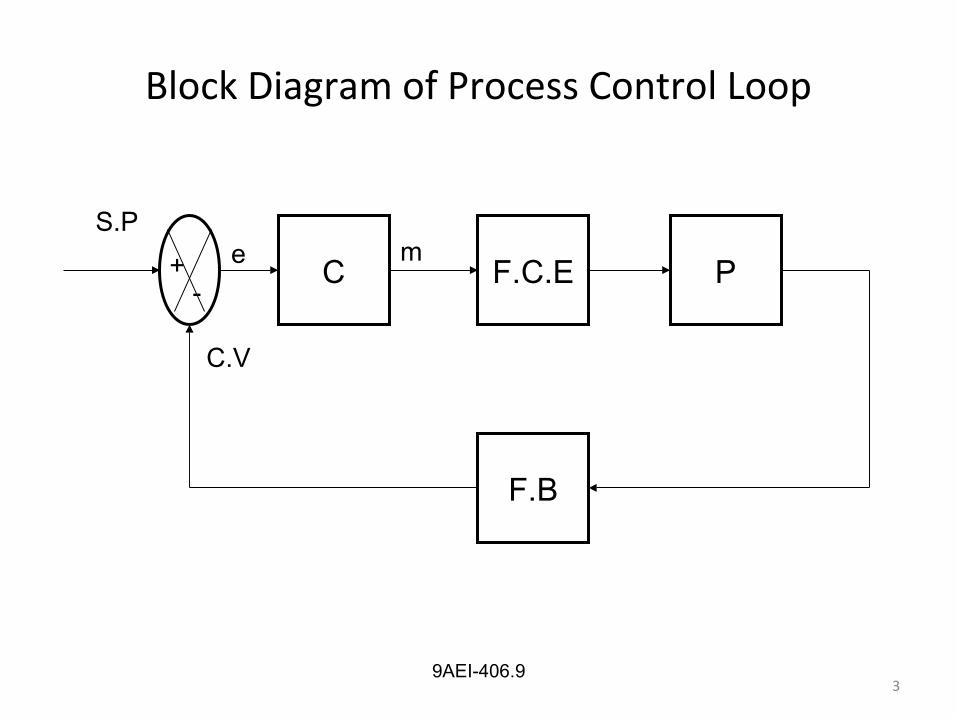
C F.C.E P
F.B
+-
S.P
C.V
e m
Block Diagram of Process Control Loop
49AEI-406.9
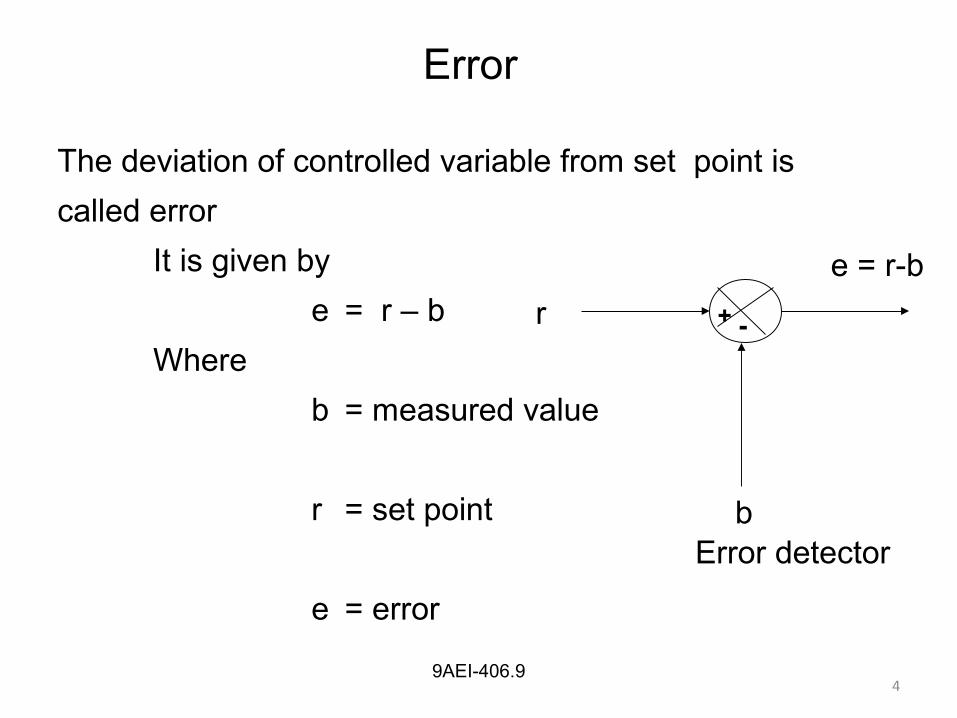
The deviation of controlled variable from set point is
called error
It is given by
e = r – b
Where
b = measured value
r = set point
e = error
Error
+ -r
b
e = r-b
Error detector
59AEI-406.9
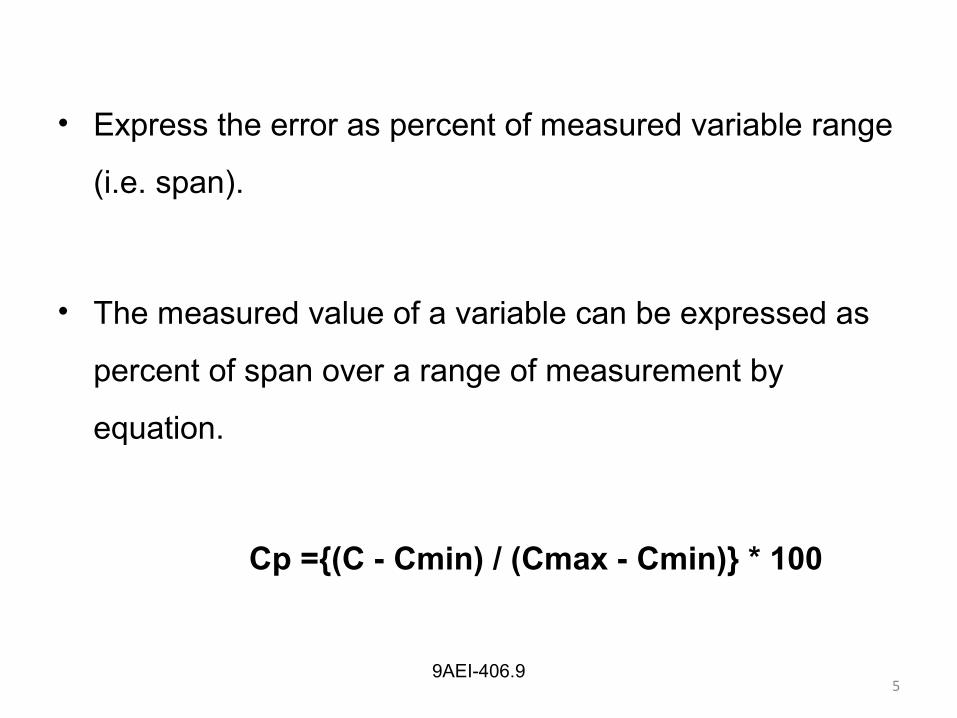
• Express the error as percent of measured variable range
(i.e. span).
• The measured value of a variable can be expressed as
percent of span over a range of measurement by
equation.
Cp ={(C - Cmin) / (Cmax - Cmin)} * 100
69AEI-406.9
Where
Cp = Measured value as percent of measurement range
C = Actual measured value
Cmax = Maximum of measured value
Cmin = Minimum of measured value
79AEI-406.9
Error
To express error as a percent of span, the measured
indication of minimum and maximum can be used as below.
ep ={ (r - b) / bmax – bmin} * 100
where ep = error expressed as percent of span.
89AEI-406.9
Variable range
• The variable under control has a range of values within which
control is maintained.
• This range can be expressed as the minimum and maximum
value of the variable or the nominal value plus and minus the
spread about this nominal.
• If a standard 4-20mA signal transmission is employed, then
4mA represents the minimum value of the variable and 20mA
the maximum.
8
99AEI-406.9
Control parameter range
• The controller output range is the translation of output to the
range of possible values of the final control element.
• This range also is expressed as the 4-20mA standard signal
again with the minimum and maximum effects in terms of the
minimum and maximum current.
9
109AEI-406.9
Control lag
• The control system also has a lag associated with its operation
that must be compared to the process lag.
• When a controlled variable experiences a sudden change, the
process-control loop reacts by outputting a command to the
final control element to adopt a new value to compensate for
the detected change.

119AEI-406.9
Example

129AEI-406.9
Control lag
• “Control lag refers to the time for the process-control loop
to make necessary adjustments to the final control element”.
• If a sudden change in liquid temperature occurs, it
requires some finite time for the control system to physically
actuate the steam control value.
12
139AEI-406.9
Dead time
• Time variable associated with process control is both a
function of the process-control system and the process.
• “This is the elapsed time between the instant deviation
(error) occurs and the correction action first occurs”.
149AEI-406.9
• An example of dead time occurs in the control of a
chemical reaction by varying reactant flow rate through a
long pipe.
• When a deviation is detected, a control system quickly
changes a value setting to adjust flow rate. but if pipe is
quite long, there is a period of time during which no
effect is felt in the reaction vessel.
159AEI-406.9
Dead Time
• This is the time required for the new flow rate to move
down the length of the pipe.
• Such dead times can have a very profound effect on the
performance of control operations on a process.
15
169AEI-406.9
Cycling
• Cycling the behavior of the dynamic variable error under various modes of control.
• One of the most important modes is an oscillation of the error about zero.
• This means the variable is cycling above and below the set point value.
• Such cycling may continue indefinitely, in which case we have ‘steady-state cycling’.
16
179AEI-406.9
Cycling
• Here interested in both the peak amplitude of the ‘error
‘and the ‘period of the oscillation’.
• If the cycling amplitude decays to zero, however, we
have a cyclic transient error.
• Here we are interested in the ‘initial error’, the period of
the cyclic oscillation, and ‘decay time’ for the error to reach
zero.
Controller Modes
9AEI-406.1018
9AEI-406.1019
Controller Modes
Two modes of control action
• Discontinuous control mode
• Continuous controller
9AEI-406.1020
Discontinuous control mode
• In Discontinuous mode the controller command
intimates a discontinuous change in in the controller
parameters.
9AEI-406.1021
Different types of discontinuous modes
•Two position mode
•Multi position mode
•Floating control mode
9AEI-406.1022
Continuous mode
• In continuous mode, smooth variation of the control
parameters is possible
9AEI-406.1023
Different types of continuous modes
• Proportional controller (P)
• Integral controller (I)
• Derivative controller (D)
• Composite control modes
9AEI-406.1024
Composite controller modes
Composite controller modes combine the continuous control modes
Proportional – Integral (PI)
Proportional – Derivative (PD)
Proportional – Integral – Derivative (PID)
9AEI-406.1025
Control actions
• The error that result from the measurement of the
controlled variable may be positive or negative.
Types of control action
• Direct action
• Reverse action

9AEI-406.1026
Direct action
• A controller is said to be operated with direct action when
an increasing value of the controller output.
• Example level control system.
• If the level rises (controlled variable increases) the control
output should increase to open the valve more to keep the
level under control.

9AEI-406.1027
Reverse action
• A control is said to be operating with reverse action when
an increasing value of the controlled variable causes a
decreasing value of the controller output.
• Example a simple temperature control of furnace with
fuel as heat energy.
• If the temperature increases, the control output should
decrease to close the valve for decreasing the fuel input
to bring the temperature under control
289AEI-406.11 & 12
ON - OFF Controller
• Two position control is a position type of a controller action in
which manipulated variable is quickly changed to either
maximum (or) minimum value depending upon whether the
controlled variable is greater or less than the set point
• Two position control mode is also called ON – OFF control
mode
28
299AEI-406.11 & 12
P = 0% Cp > Sp
= 100% Cp < Sp
P = controller output
Cp = controlling parameter
Sp = set point
The controller output in two position Mode can be expressed as
Two position mode
309AEI-406.11 & 12
ON - OFF Controller
• The minimum value of manipulated variable is zero (off)
• The maximum value is the full amount possible (on)

319AEI-406.11 & 12 31

329AEI-406.11 & 12
ON - OFF Controller
The relation ship shows that
• When the measured value is less than set point, full control
output result.
• When is more than set point, the controller output is zero.
339AEI-406.11 & 12
• Liquid bath temperature control
• Level control
• Room heating System
• Air conditioners
Applications
349AEI-406.11 & 12
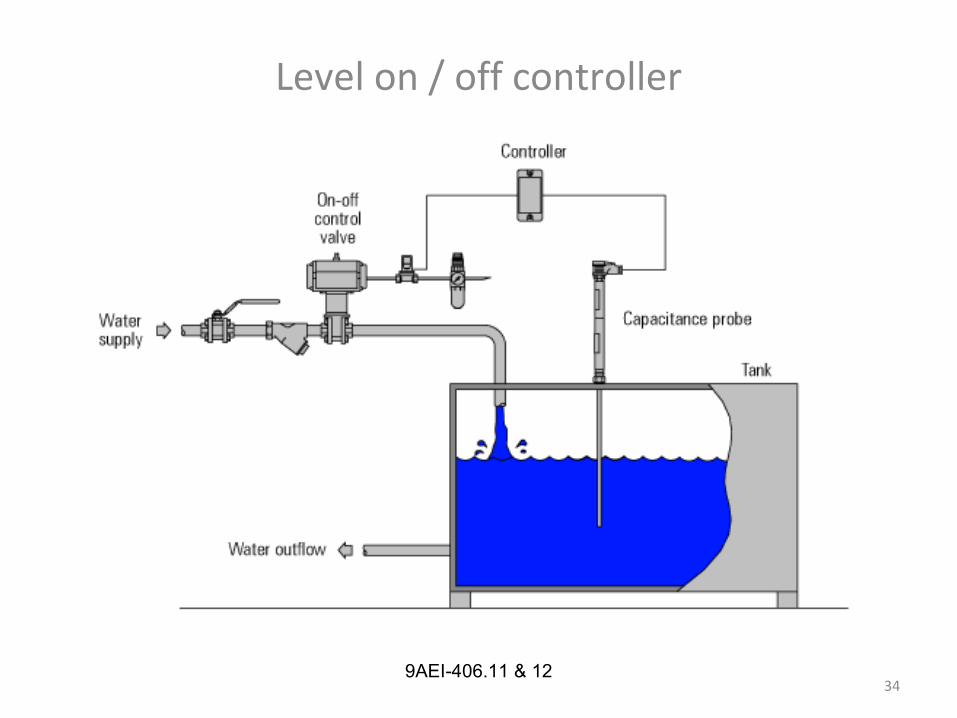
Level on / off controller
359AEI-406.11 & 12
369AEI-406.11 & 12

379AEI-406.11 & 12
Advantages
• Simplest and cheapest.
• Two position controller is suitable for system with slow
process rates.

389AEI-406.11 & 12
Disadvantages
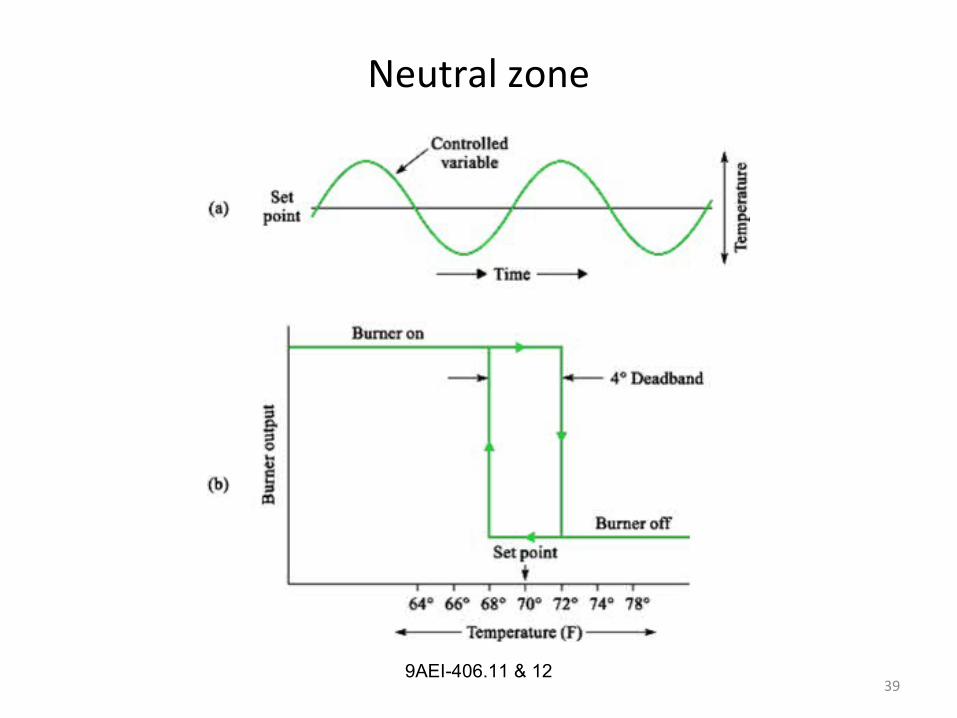
• Over shoot and Under shoot resultant continuous oscillation
• Neutral zone
399AEI-406.11 & 12
Neutral zone
409AEI-406.11 & 12
Neutral zone
• In practical implementation of the two position controller
• There is an overlap as ep increases through zero or
decreases through zero
• In this span, no change in controller output occurs fig.1
419AEI-406.11 & 12
Two position mode controller
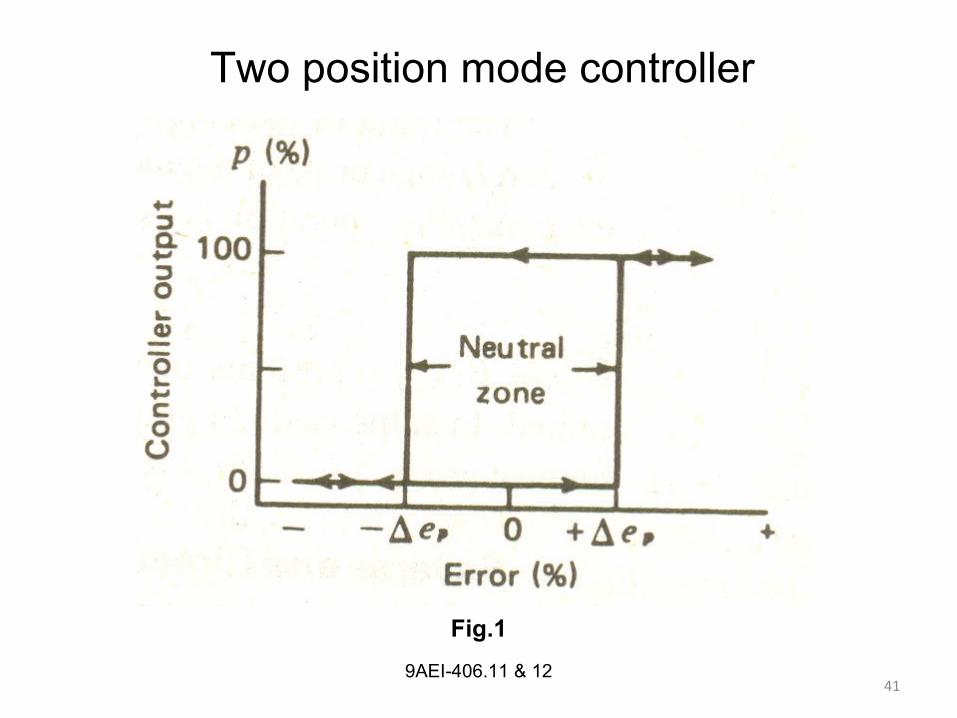
Fig.1
429AEI-406.11 & 12
• The controller output changes to 100% when the error
changes above Δ ep
• The controller output changes to 0% when the error
changes below Δ ep
Neutral zone
439AEI-406.11 & 12
Neutral zone
• The range 2 Δ ep is called as the neutral zone
• This is also called as differential gap
• This is purposefully designed above a certain level
• This prevents excessive cycling
• This is a desirable Hysteresis in a system
9AEI-406.1344
Multi position mode
• A logical extension of two position control is to provide
several inter mediate rather than only two settings of the
controller output.
• Multi position mode is used to reduce the cycling behavior
and over shoot & undershoot inherent in two position
mode.
9AEI-406.1345
• A three position mode is one in which the manipulated
variable takes one of three value.
• High
• Medium
• Low
9AEI-406.1346
Multi position mode
p = pi , e p > ei i = 1,2,3,4---------n
• As Error exceeds ± e i,
Controller output is adjusted to preset values of pi .
• This mode is represented by following equation

9AEI-406.1347
• Three - position controller is best example for multi
position controller
• The controller output in 3- position controller is
P = 100 % e p > e2
= 50 % - e1< e p < e2
= 0 % ep < - e1
Example for multi position controller
9AEI-406.1348
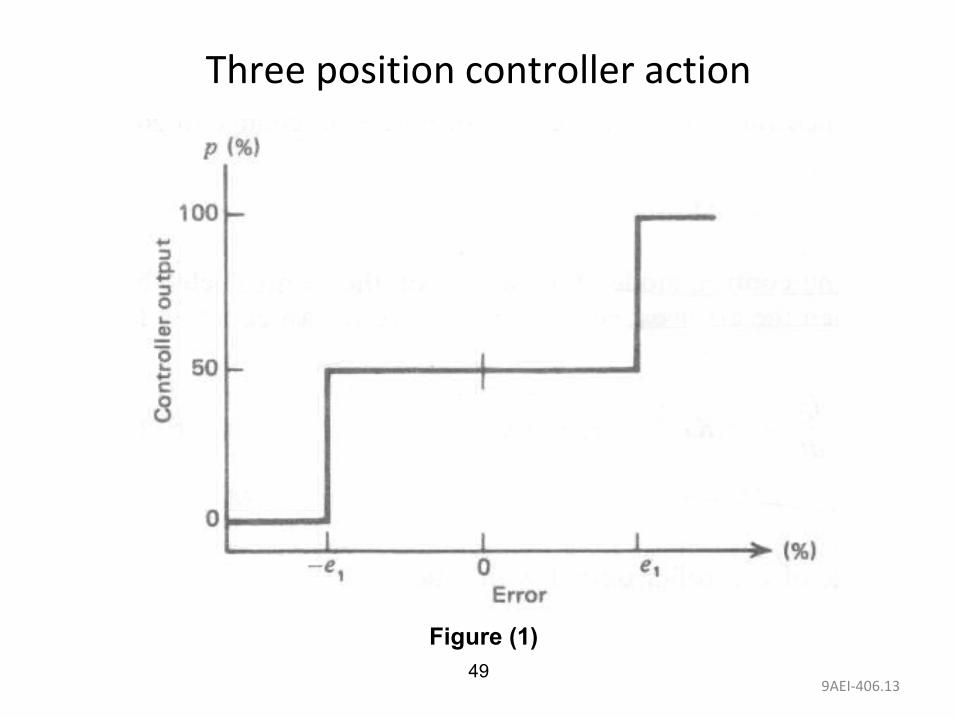
• As long as the error is between e2 and e1 of the set point
the controller stays at some nominal setting indicated by a
controller output as 50%.
• If the error exceeds the set point by e2 or more then the
output is increased to 100%.
• If the error is less than set point by -e1or more , the
controller output is zero.
• Three position controller action can be shown in figure (1)
9AEI-406.1349
Three position controller action
Figure (1)
9AEI-406.1350
Advantages
• Reduce the cycling behavior
• Reduce the overshoots
• Reduce the undershoots
9AEI-406.1351
Disadvantages
• It requires more complicated final control element (It
requires more than two settings).
529AEI-406.14 TO 16
Proportional control
• A proportional control system is a type of linear feedback
control system.
• Two classic mechanical examples are the toilet bowl float
proportioning valve and the fly-ball governor.

539AEI-406.14 TO 16 53

549AEI-406.14 TO 16
Proportional controller
• Proportional action is a mode of controller action in
which there is a continuous linear relation exist between the
controller and error.
54
559AEI-406.14 TO 16
• Proportion action is mode of control action In which there is
a continuous linear relation between value of the deviation
and manipulated variable.
• The action of control variable is repeated and amplified in
the action of the control element.
55
569AEI-406.14 TO 16
Proportional controller
Proportional controller also called
• Correspondence controller
• Droop control
• Modulating controller
579AEI-406.14 TO 16
• In the proportional control algorithm, the controller output is
proportional to the error signal, which is the difference
between the set point and the process variable.
• In other words, the output of a proportional controller is the
multiplication product of the error signal and the proportional
gain.
589AEI-406.14 TO 16
•In this control mode a linear relationship exists between
the controller output and error.
P = k p e p + p0
•K p = proportional gain between error and controller
output
•P0 = controller output with no error
•e p = error
•p= controller output.
Proportional control mode
599AEI-406.14 TO 16
Proportional Band (PB)
•It is defined as the range of error to cover 0% to 100%
controlled output.

609AEI-406.14 TO 16 60
•PB can be expressed by the equation
PB =
K p = proportional gain
PB = proportional band
• PB is dependent on gain. High gain means large
response to an error
100
Kp

619AEI-406.14 TO 16 61
Fig.1
629AEI-406.14 TO 16
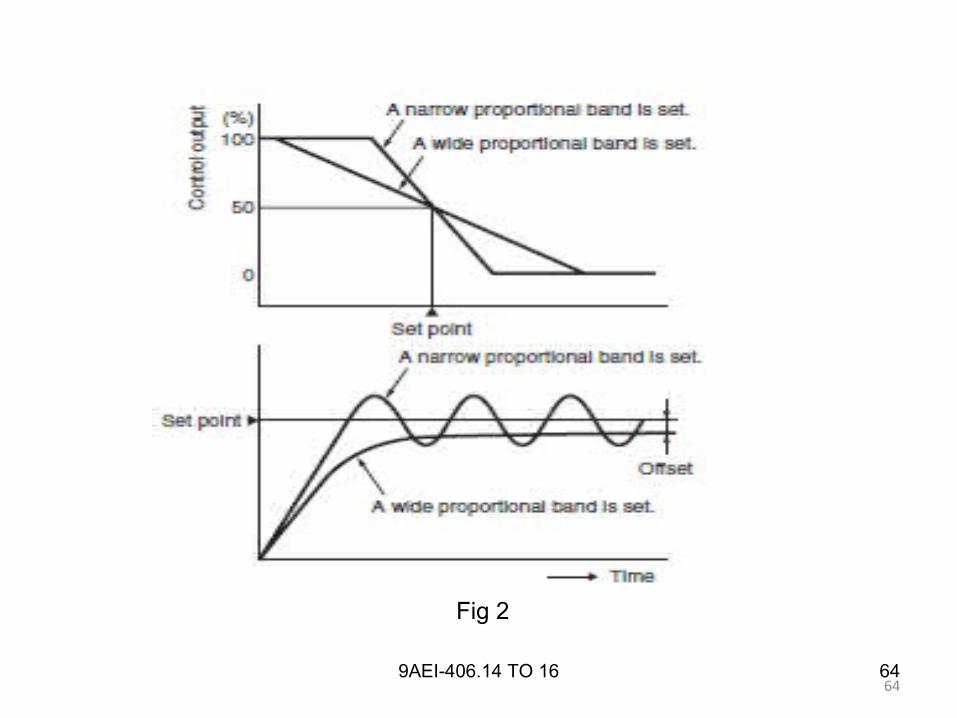
A plot of the proportional mode output verses error shown in fig.
• Po has been set to 50% and two different gains have been used.
• Proportional band is depend on the gain.
• A High gain means large response to an error but also a narrow error band with in which output is not saturated.
• A High percentage of PB (Wide band ) correspond to less sensitive controller settings.
639AEI-406.14 TO 16 63
a) If the error is zero, the output is constant equal to Po.
b) If there is error, for every 1 % of error a correction of Kp
percent is added to or subtracted from Po. depending on
the reverse or direct action of the controller.
The characteristics of proportional mode
649AEI-406.14 TO 16 64
Fig 2

659AEI-406.14 TO 16 65
Fig.3
669AEI-406.14 TO 16
Advantages of Proportional Control
• Does not require precise analytical model of the system
being controlled.
• Simple implementation.
• Proper for Applications with simple requirement (Overshoot,
settling time, oscillation and so on).

679AEI-406.14 TO 16
Disadvantages of Proportional Control
• Inaccurate model may cause steady-state error nonzero
• Disturbance input is non zero
• Reference input is non zero
• Noise input
• Inaccurate model may cause oscillations.
67
689AEI-406.14 TO 16
Applications
• Proportional control generally used in processes where
large load changes are unlikely or with moderate to small
process lag.
699AEI-406.14 TO 16
• Offset is a permanent ‘residual error’ in the operating
point of the controlled variable when load change occurs
• Offset can be minimized by a larger value of Kp
(proportional gain).
OFFSET

709AEI-406.14 TO 16
Fig.4
719AEI-406.14 TO 16
OFFSET
• consider a system under nominal load with the controller at
50%and the error zero as shown in Fig 2.
• If the transient error occurs the system respond by changing
controller out put in correspondence with the transient to
effect return to zero error
729AEI-406.14 TO 16
• If the transient error occurs the system respond by changing controller out put in correspondence with the transient to effect return to zero error.
• A load change error that requires a permanent change in controller output to produce the zero error state.
• One to one correspondence exist between controller out put and error , it is clear that a new zero controller out put never be achieved.
• The system produces a small permanent offset in reaching a compromise position of controller output under new load
739AEI-406.14 TO 16
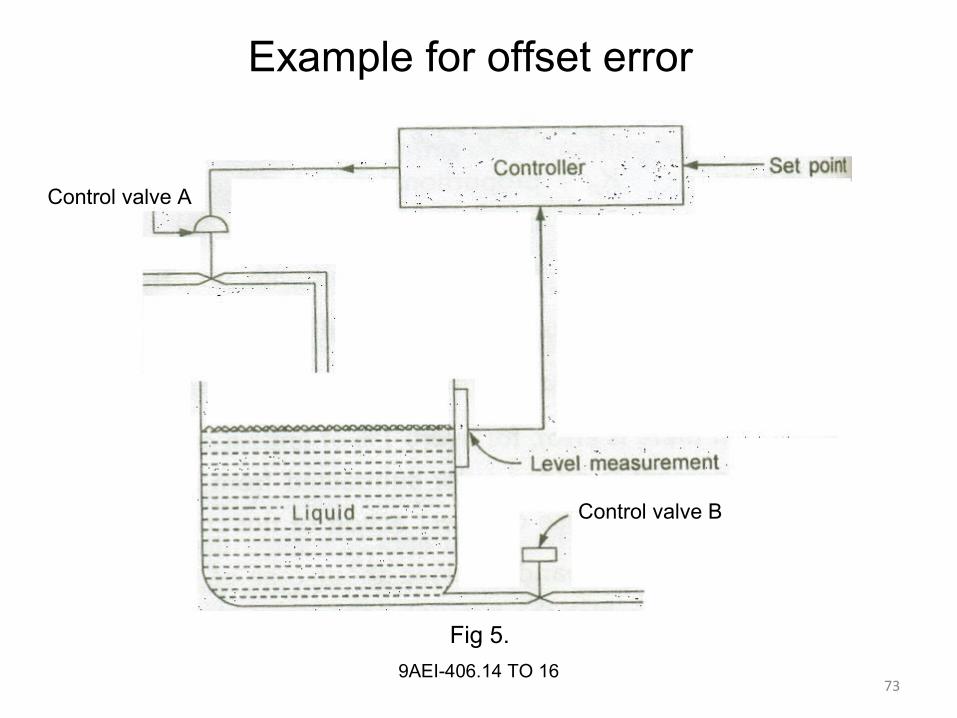
Example for offset error
Fig 5.
Control valve A
Control valve B
749AEI-406.14 TO 16
• Consider the proportional mode level control system as
shown in fig 1.
• For understanding the offset error some of the numerical
values regarding proportional controller output and gain
values are assumed.
759AEI-406.14 TO 16
LET
• Valve A is linear with a flow scale factor
= 10 m3/hour/%
• Controller output P = 50%
• Proportional gain Kp=10%
• When load change occurs through B valve ,output
changes from 500m3/hr to 600m3/hr
• Then A valve moves to new position 600m3/hr
• There fore P= 60 %
769AEI-406.14 TO 16
• In proportional controller we have
• P = k p e p + p0
• ep =
=1%
So,1% OFF set error occurs when load changed
0
P
P-P 60 - 50= %
K 10
779AEI-406.14 TO 16
• Offset is eliminated by increase in the proportional gain
which result produces oscillations.
• Fig shows the effect of Kp on the offset.

789AEI-406.14 TO 16
799AEI-406.14 TO 16
9AEI-406.17 & 1880
Integral controller
• Integral action is a mode of action in which the value of the
manipulated variable is changed at rate proporonal to the
derivation.
• Integral controller can also be called as Reset Controller.

9AEI-406.17 & 1881
• If the deviation is double over a previous value , the final
control element is moved twice as faster.
• When the controlled variable is at the set point (zero
deviation), the final control element is stationary.
9AEI-406.17 & 1882
Integral control mode
•Analytically reset action can be expressed as
= KI ep ……( 1 )
= rate of controller output change (%/s)
KI = constant relating the rate of the
ep = error(%/s/%)
Because of process lags it is used for small process capacities
dt
dp
dt
dp

9AEI-406.17 & 1883
• The inverse of K I, called the integral time Ti =1/Ki,
Expressed in seconds or minutes, is used to describe the
integral mode.
• Ti is defined as the time of change of controlled variable
caused by unit change of deviation.

9AEI-406.17 & 1884 84
• For actual controller output equation 1 can be integrated
and is given by
Where p (0) = the controller output at t = 0.
• This equation shows that present controller output p(t)
depends upon the history of error from when obserervation
started at t=0
t
t p
0
p(t) = k e ( t)dt +p(0)∫
9AEI-406.17 & 1885
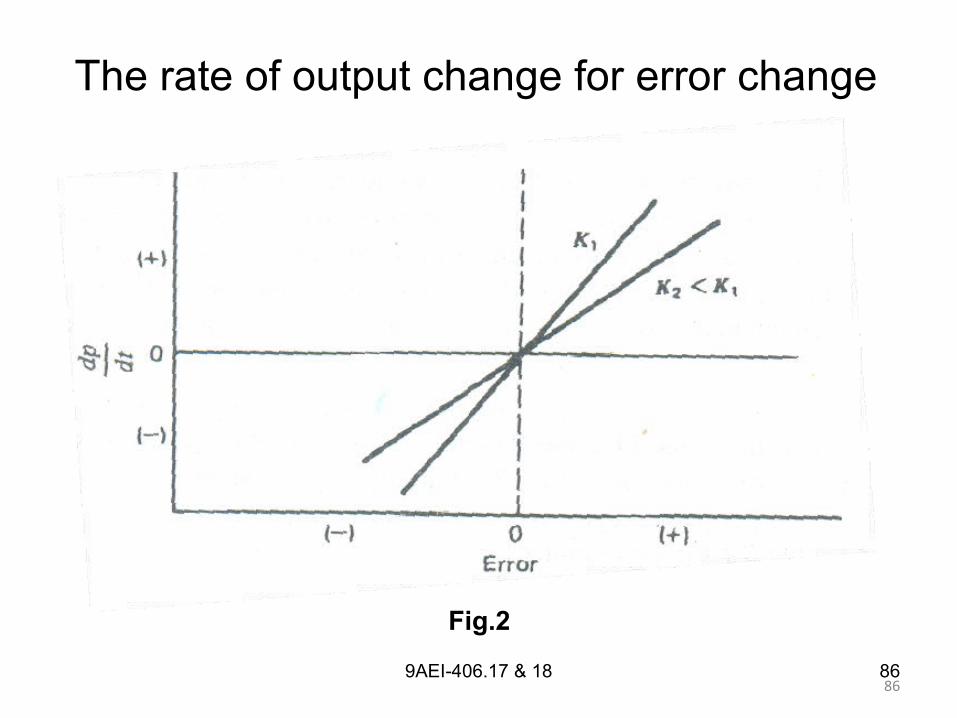
• If the error doubles ,the rate of controller output change also
doubles.
• The constant ki expressed the scaling between error and
controller output.
• A larger value of ki means that small error produces large
rate of change of p and vice versa.
869AEI-406.17 & 18 86
The rate of output change for error change
Fig.2
879AEI-406.17 & 18 87
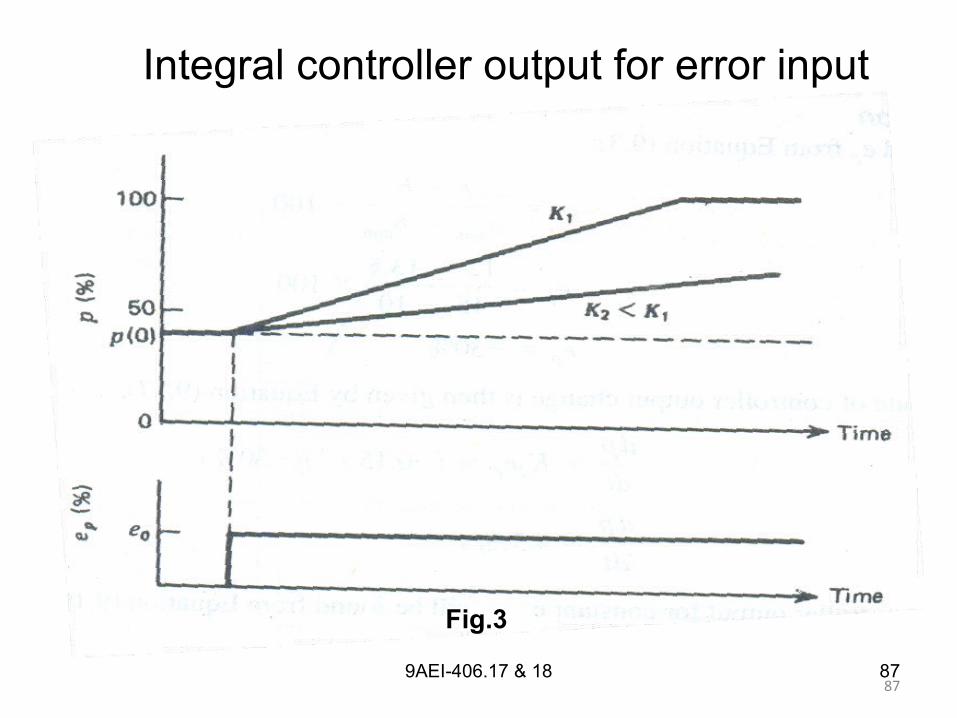
Integral controller output for error input
Fig.3
889AEI-406.17 & 18
• We see that the faster rate provided by Ki cause s much
greater control output at a particular time after the error is
generated.

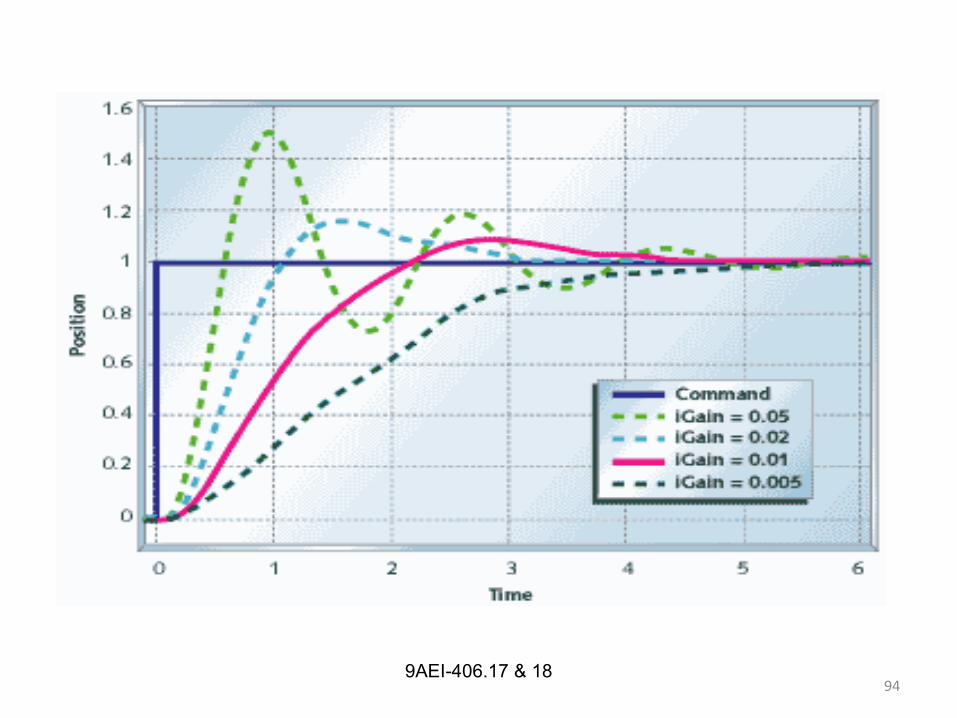
899AEI-406.17 & 18
Characteristics of integral controller
• If the error is zero, the output stay fixed at a value to what it
was when error went to zero.
• If the error is not zero, the output will begin to increase or
decrease at a rate of ki percent per second for every one
percentage of error.

909AEI-406.17 & 18 90
Integral mode output for error with effect of process and control lag
Fig. 4

919AEI-406.17 & 18
Advantages
• Eliminate the offset.
• Produces sluggish and log oscillation responses.
• If increase gain Kp to produce faster response the system
become more oscillatory and may be led to instability.
91
929AEI-406.17 & 18
Disadvantages
• Slow response
• Process lag is to large cyclic response

939AEI-406.17 & 18
Applications
• The integral control mode is not used alone but can be for
systems with small process lags and correspondingly small
capacities.
949AEI-406.17 & 18
9AEI-406.19 & 2095
Derivative controller
• The derivative mode of controller operation provides that the
controller output depends on the rate of change of error.

9AEI-406.19 & 2096
Other Terms of Derivative controller
• Rate response
• Lead component
• Anticipatory controller
9AEI-406.19 & 2097
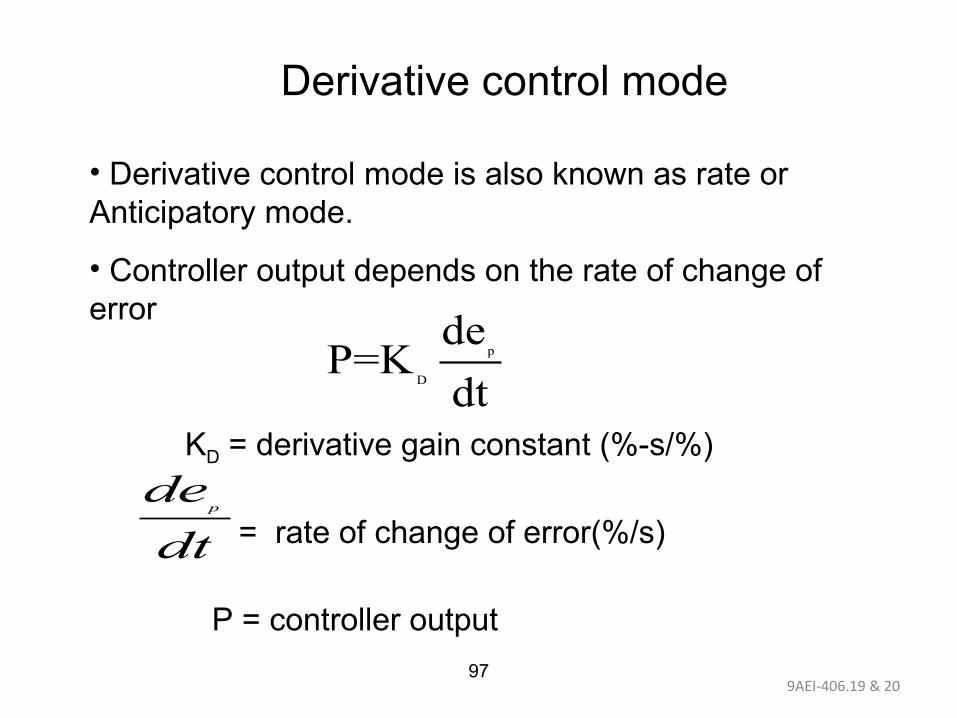
Derivative control mode
• Derivative control mode is also known as rate or Anticipatory mode.
• Controller output depends on the rate of change of error
KD = derivative gain constant (%-s/%)
= rate of change of error(%/s)
P = controller output
p
D
deP=K
dt
pde
dt

9AEI-406.19 & 2098
9AEI-406.19 & 2099
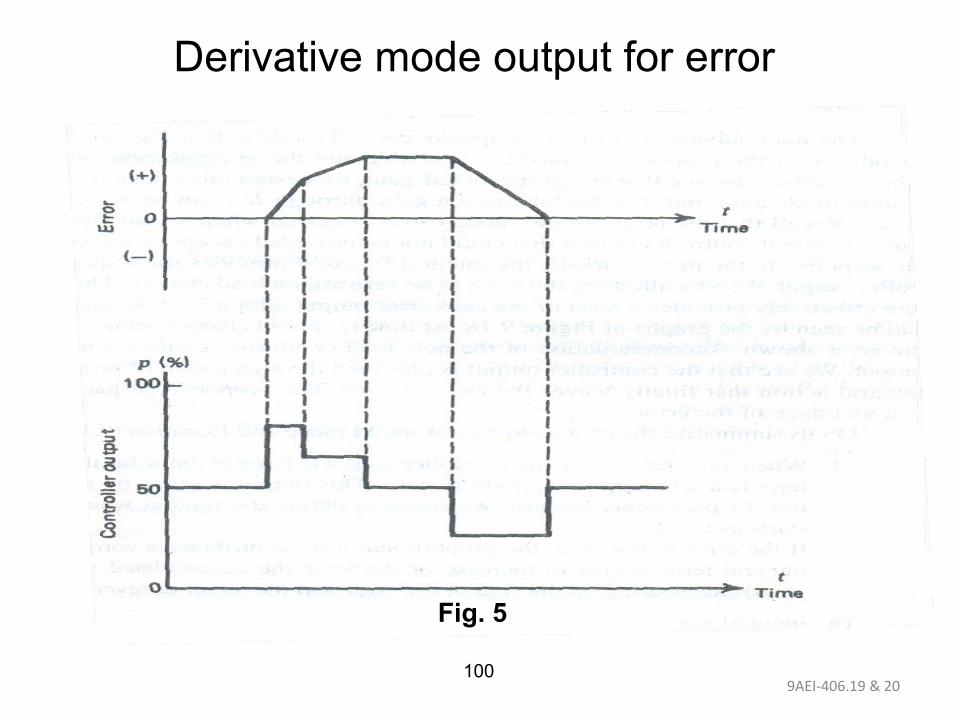
9AEI-406.19 & 20100
Derivative mode output for error
Fig. 5

9AEI-406.19 & 20101 101
• The characteristics of the derivative control mode
are:
a) If the error is zero, the mode provides no output.
b) If the error is constant in time, the mode provides no
output.

9AEI-406.19 & 20102 102
c) If the error is changing in time, the mode contributes an
output of KD percent for every 1% per second rate of
change of error.
d) For direct action, a positive rate of change of error
produces a positive derivative mode output.
9AEI-406.19 & 20103
Advantages
• The derivative term the controller anticipate what the error
will be in the immediate future and applies control action
which is proportional to the current rate of change of error.
• Fast response (Derivative mode predict process error before
they have evolved and take corrective action in advance of
that occurrence).
9AEI-406.19 & 20104
Disadvantages
• Noisy response with almost zero error it can compute large
derivatives and thus yield large control action, although it is
not needed.
9AEI-406.19 & 20105
Flow controlling
• Chemical reactors
• Petroleum industries
• Power production
Applications
1069AEI-406.21
• This mode is also called as proportional plus reset action
controller.
• Combination of proportional controller and integral
controller is called PI controller.
Proportional + integral control
1079AEI-406.21
• Proportional control mode provides a stabilizing
influence.
• Integral control mode provide corrective action when
deviation in controlled variable from set point.
• Integral control mode has a phase lag of 90º over
proportional control.
• Small process lag permits the use of a large amount of
integral action.
1089AEI-406.21
Analytical expression for controller output in PI
controller
P = Kp ep +Kp KI ∫ep dt +pI(0)
PI(0) = integral term value at t = 0(initial value))
1099AEI-406.21
1109AEI-406.21
Advantages
• Smooth controlling by one to one correspondence of proportional controller.
• Eliminates the offset by integral action.
• It shows a maximum overshoot and settling time similar to the P controller but no steady-state error.
• PI mode can be used in a system with frequent or large load change.
1119AEI-406.21
Disadvantages
• Integration time ,the process must have relatively slow
changes in load to prevent oscillations induced by the integral
overshoot.
• During the start up of a batch process the integral action
causes considerable overshoot error.
1129AEI-406.21
Application
• PI controller can be used in systems with frequent (or)
large load charges.
• Overshoot and cycling often result when PI mode Control is
used in startup of batch process.
112

1139AEI-406.21
Characteristics of PI controller
• When the error is zero the controller out put is fixed at the
value that the integral term had when the error went to zero.
• If the error is not zero, the proportional term contribute a
correction and the integral term begin to increase or decrease
the accumulation value depends on the sign of error and
direct or reverse action
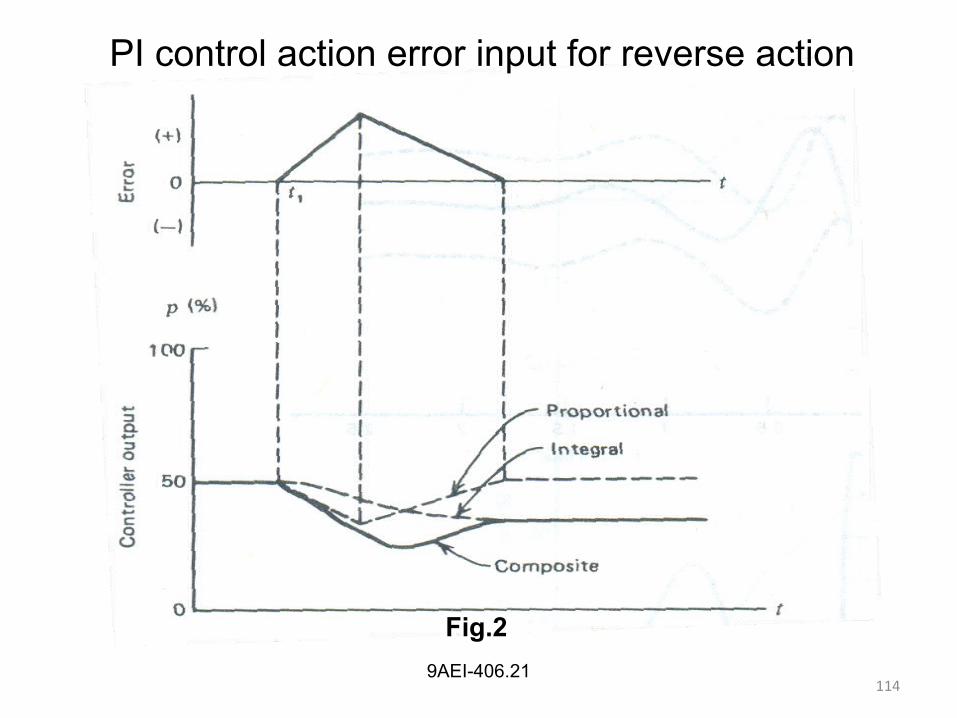
1149AEI-406.21
PI control action error input for reverse action
Fig.2
1159AEI-406.22 115
• This mode is also called as proportional plus reset action
controller.
• Combination of proportional controller and Derivative
controller is called PD controller.
Proportional + integral control
1169AEI-406.22
• Derivative action provides the boost necessary to
counter act the time delay associated with such control
systems.
• Derivative control leads proportional control by 90º
Proportional + derivative control

1179AEI-406.22
Analytical expression for PD controller is:
P = Kp ep +Kp KD dep +p0
dt

1189AEI-406.22

1199AEI-406.22
Advantages
• Handled fast process load changes as long as the load
change offset error is acceptable.
• Reduce the magnitude of offset because of narrow
proportional band.
• Properly fits and adjusts to a process and prevent
controlled variable deviation.
• Reduces the time required to stabilize.

1209AEI-406.22
• Used in multi capacity process applications.
• Flow process
• Batching operations like periodic shutdown, emptying
and refilling.
Applications
1219AEI-406.22
Disadvantages
• Does not eliminate offset after a load disturbance.
• It cannot be used where the system lags are less.
1229AEI-406.22 122
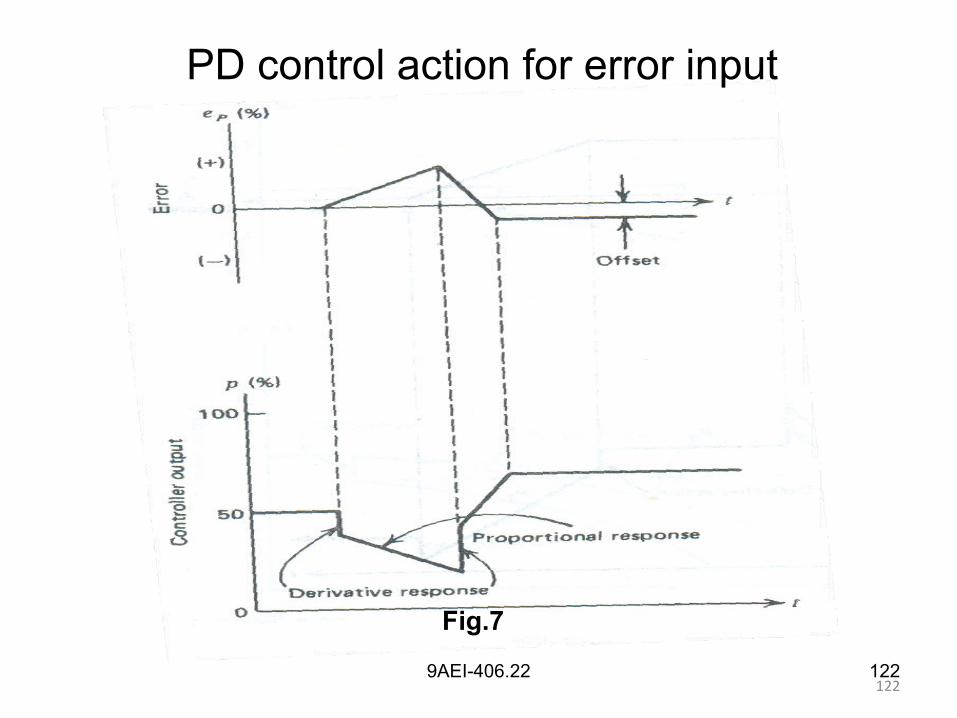
PD control action for error input
Fig.7
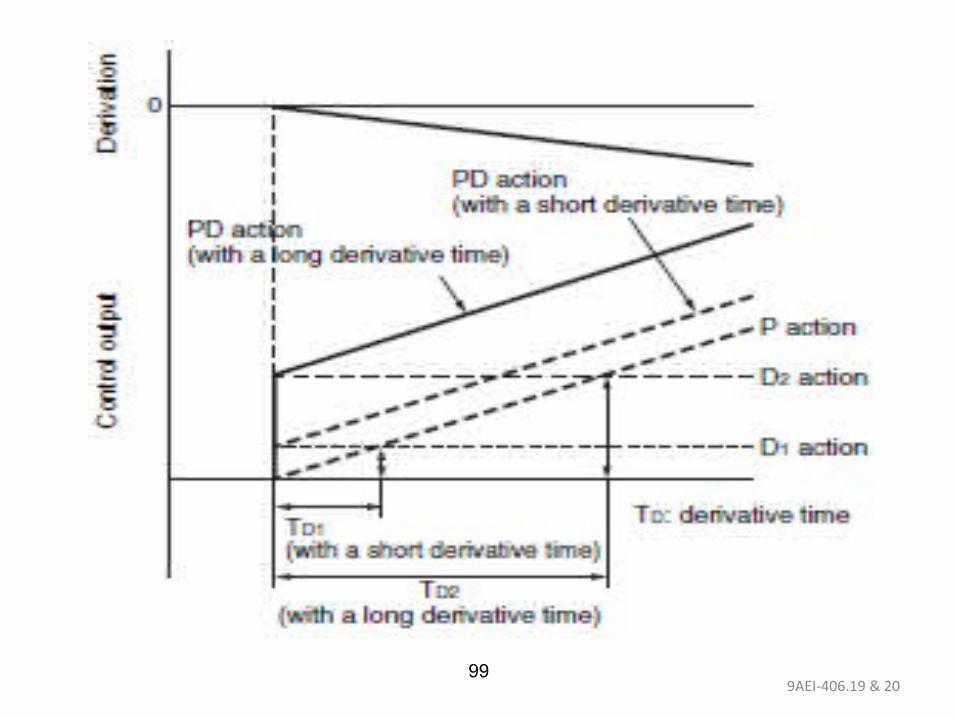
1239AEI-406.22
• The effect of derivative action in moving the controller
output in relations to the error rate change.










![[CM2015] Chapter 6 - Land Surface Process Modeling](https://img.pdfslide.tips/doc/110x75/589f959c1a28ab1b198b6269/cm2015-chapter-6-land-surface-process-modeling.jpg)















