Embed Size (px)
Citation preview

本当は役に立つ (??)代数トポロジー2016/11/05 PhilomathClub@ サイエンスアゴラ
s.t.@simizut22

自己紹介• s.t.@simizut22
• 某会社勤務の数理計画屋さん / プログラマ• 代数トポロジーが好き• s.t. は such that または subject to (as you like)

本日の内容• Robotics と topology• その他応用

1. Robotics & Topology• 次の問題を考える
N 台のロボットが地点 にいる。時刻 T の後に各ロボットは地点 に移るとする。各ロボットは障害物やお互いのぶつかってはいけないとする ( )※
Q1. 上記のような移動は可能か??Q2. そのような計画を algorithmic に計算することは可能か??Q3. 複雑度はどのくらいか?? (現実的な時間で計算できるか )
※ 耐久性に難があり故障してしまうのだ

例 1 :線分• 線分 I 上の 2 台のロボットを入れ替えることはできない
𝐴1=𝐵2 𝐴2=𝐵1

例 2 : Y 字のグラフ• 直線から分岐を作ってあげた Y 字のグラフだと、任意の 2 点を交換することが可能
𝐴 𝐵 𝐴 𝐵 𝐴𝐵

Configuration Space• 空間 X 上の N 点が互いにぶつからずに移動できるか、先のよ…うな簡単な例なら分かるが一般的に考えるには
•全体をひとつの空間と見よう i.e.
• N 台のロボットがぶつからずに進む⇔ 内の道を選択するということ

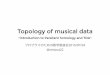
例:平面上の n 点• 各点の軌跡をちょっと動かすことで、衝突を避けられる• 右図は、 平面内の 3 点が互いにぶつかることなく移動している様子
( )※
• 実用で現れる場合、ロボットは rail の上など→ base space はグラフ※ 画像は Wikipedia(組み紐) より抜粋

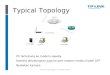
線分の 2 点配置空間
• 2 点の入れ替えができないことは、左上の三角形から右下の三角形への path がとれないことに対応

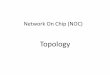
Y 字グラフの配置空間• cell structure は以下で表される

Y 字グラフの配置空間• の変位レトラクト ( 連続変形できる部分空間 )

Discretization Method• Y 字グラフでは変位レトラクトを配置空間の記述から考えた• より一般的には ??• Consider
• remark:
• 先の Y 字グラフの例は 連続変形での同値

例: Q 字グラフ
𝐶2(𝑄) 𝐷2(𝑄)
≄h .𝑒 .

例: X 字グラフ
𝐶2(𝑋 ) 𝐷2(𝑋 )
≈h .𝑒 .

Discretization Method• はいつホモトピー同値を与えるか ?? がホモトピー同値 ( 連続変形で同値 )
Q 字グラフには非自明な長さ 1 のループが存在するので、ホモトピー同値でない

例:• は次のデータを持つ 2 次元の向き付られた連結な曲面
• 従って特に euler 標数完全グラフ

例:• 曲面の分類定理から、• Euler 標数を比べると• 上の等式を解くと• また、先の定理の仮定を満たすことはあきらか

例:
Σ6≈𝐷2 (𝐾 5 )∼h .𝑒 .𝐶2 (𝐾 5 )

Motion Planning 問題 空間 Y に対し元問題N 台のロボットがぶつからずに進む⇔ 内の道を選択するということというあるクラスの写像を構成する ( 連続と限らない )

Topological Complexity• continuous motion planning とは、
𝜋 (𝜎 )=(𝐴 ,𝐵)

Topological Complexity continuous motion planning algorithm が存在が可縮 ( 連続的に 1 点につぶせる )
• 上の定理より全空間で連続な motion planning algorithm → が一般的に設計できるわけではない どの程度の不連続度を持つかを知りたい• Topological Complexity とはその不連続度を測る数値

Topological Complexity の topological complexity …とは , なる n の最小値※連続なアルゴリズムが存在する始点・終点ペアの分割方法のうち、最小のもの

Topological Complexity は X の homotopy 不変量
従って、特にグラフ 、 ならば

Main Theorem のとき1.
2.
Rem: 具体的な algorithm の設計は論文を参考の事

まとめ ( for motion planning)• optimal path planning( 特定の 始点、終点の集合が与えられたときに、最適の移動戦略 ) とは、動機が異なる ( これはこれで NP-
complete • 最適 planning では始点と終点をちょっと動かすことで、全く異なる道を選択するかもしれない• Topological な解析の目的は stable な motion Planner を設計すること• どうしても不安定な path の存在を理論的に保障できる ( 無理なものは無理 )

その他応用• Sensor Network 問題• Euler Integral• Persistent Homology
• タンパク質の構造解析• Persistent Homology• knot • Discrete Configuration space
• ガラスの構造解析• Persistence weighted Gaussian kernel

その他応用• Neural network 解析 → 医学へ• 遺伝子解析 → 創薬へ• 系統樹解析• 民主主義の分類•言語学 etcetc (ほとんど今日話さなかった Persistent の応用 )