Embed Size (px)
Citation preview
期末專題競賽體感機械手臂
指導教授:劉日新教授組員: 1013606 蔡宜君 1013626 謝志易 1013653 簡肇杙
摘要機械手臂現今廣泛運用在自動化產業中,可減少人力成本,大幅提高經濟效益且機械手臂定位精準也可大大減少人為疏失及不可預知的問題。
研究動機
本專題將 kinect 感測器與五自由度機械手臂做整合,打造自然體感的控制平台,並使用 Labview 寫入myrio 透過遠端遙控做控制自然體感主要強調人就是控制器的概念,其優勢為不需使用任何控制器即可操縱此機械手臂
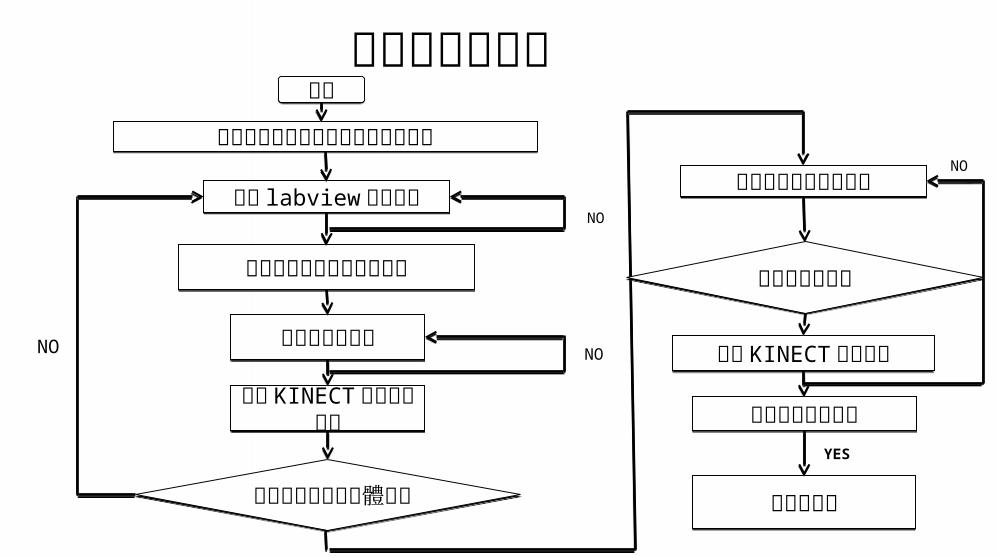
研究方法與步驟開始開始
設計機器人手臂運作方式與馬達數量設計機器人手臂運作方式與馬達數量
模擬 labview 程式參數模擬 labview 程式參數
手臂運作是否達到預期效果手臂運作是否達到預期效果
NO
調整馬達運算式調整馬達運算式
連接 KINECT 測試是否成功
連接 KINECT 測試是否成功
NO
運作模式是否像人體手臂
運作模式是否像人體手臂
NO
微調馬達配合手臂運作微調馬達配合手臂運作
加上第二隻手臂加上第二隻手臂
連接 KINECT 測試動作連接 KINECT 測試動作
是否達到預期效果是否達到預期效果
最後的改造最後的改造
YES
NO
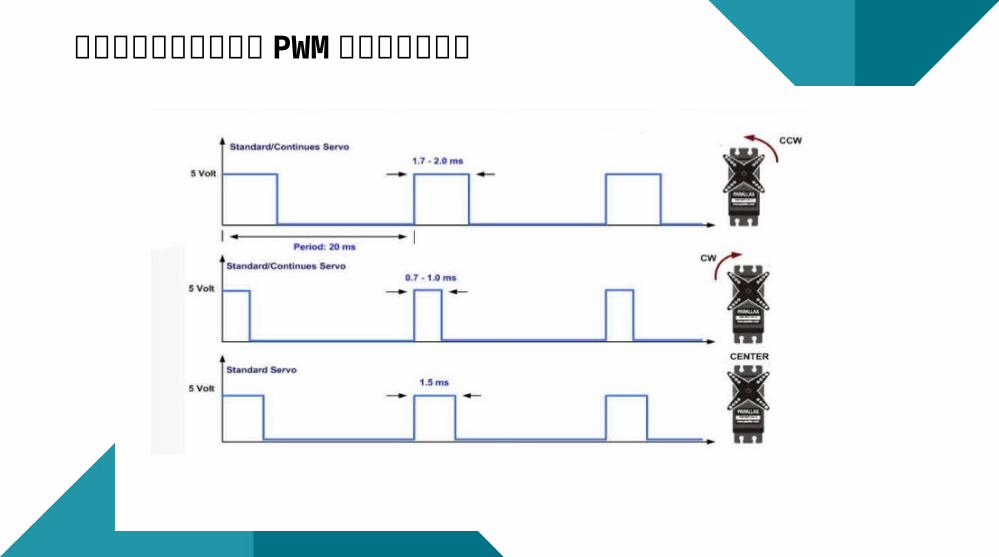
伺服馬達控制主要利用 PWM控制轉速與方向
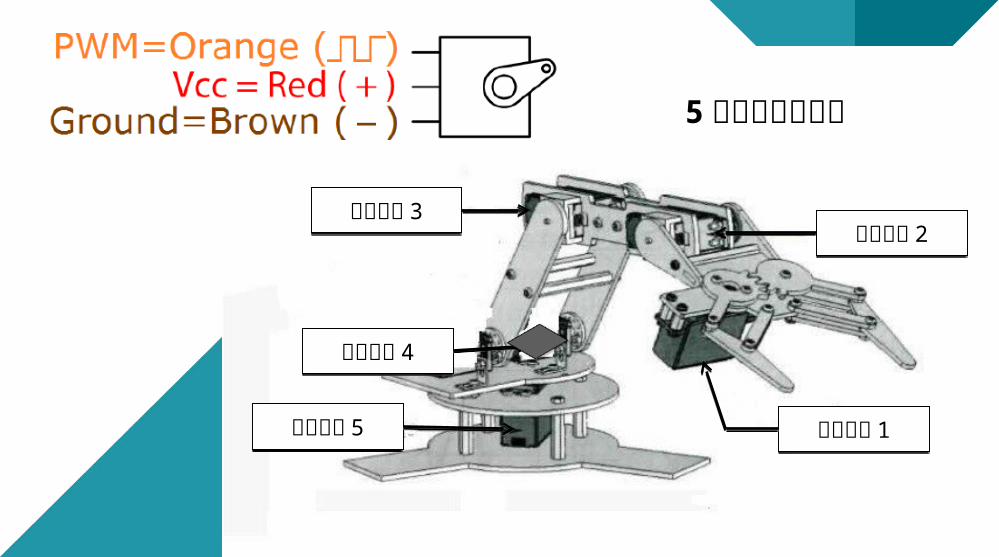
伺服馬達 1伺服馬達 1
伺服馬達 2伺服馬達 2伺服馬達 3伺服馬達 3
伺服馬達 5伺服馬達 5
伺服馬達 4伺服馬達 4
5自由度機械手臂
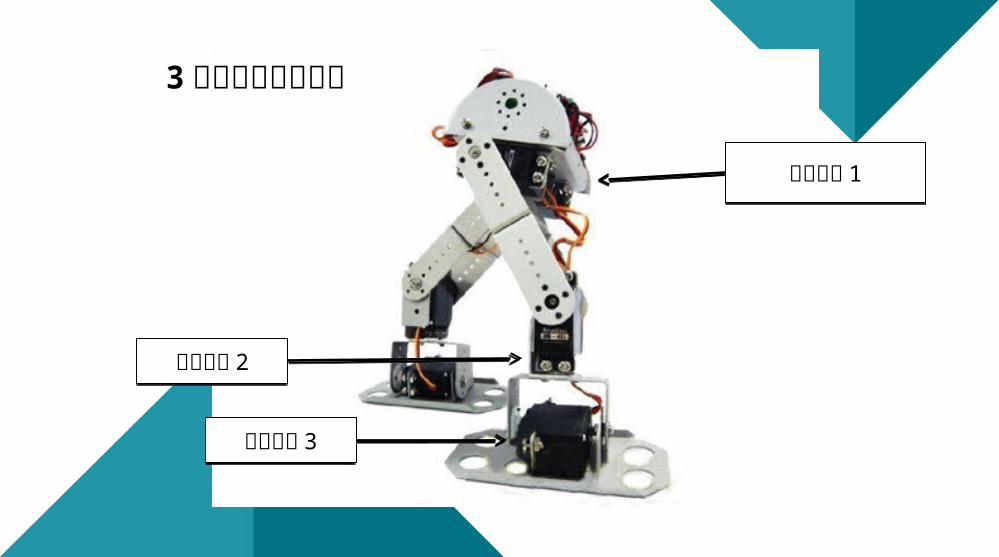
伺服馬達 1伺服馬達 1
伺服馬達 3伺服馬達 3
伺服馬達 2伺服馬達 2
3自由度機械競步足

馬達控制
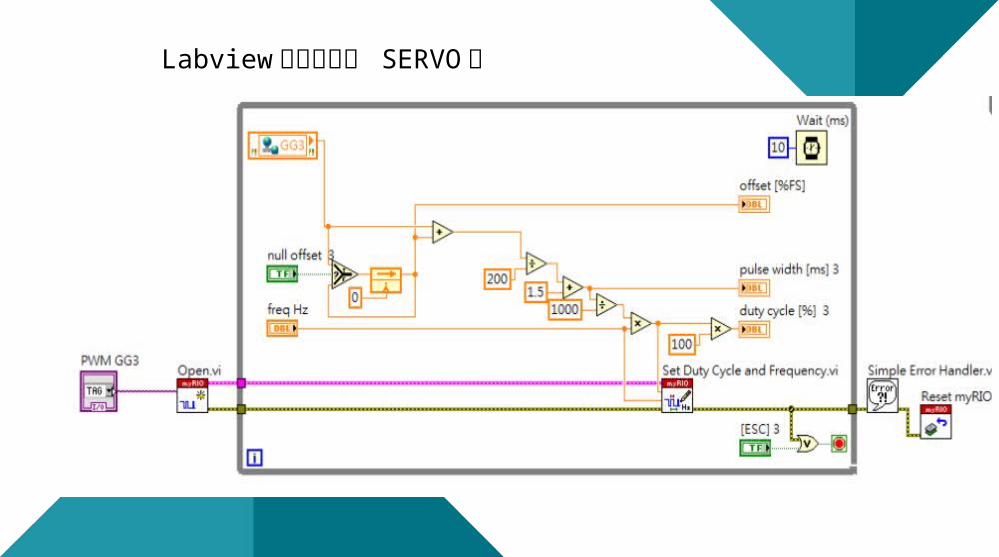
Labview 模擬與設計 SERVO 端
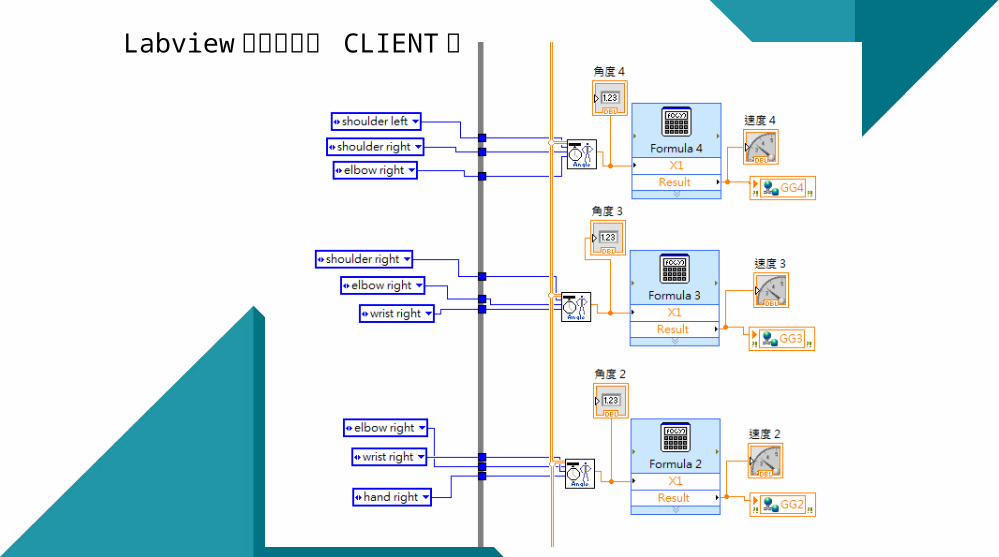
Labview 模擬與設計 CLIENT 端
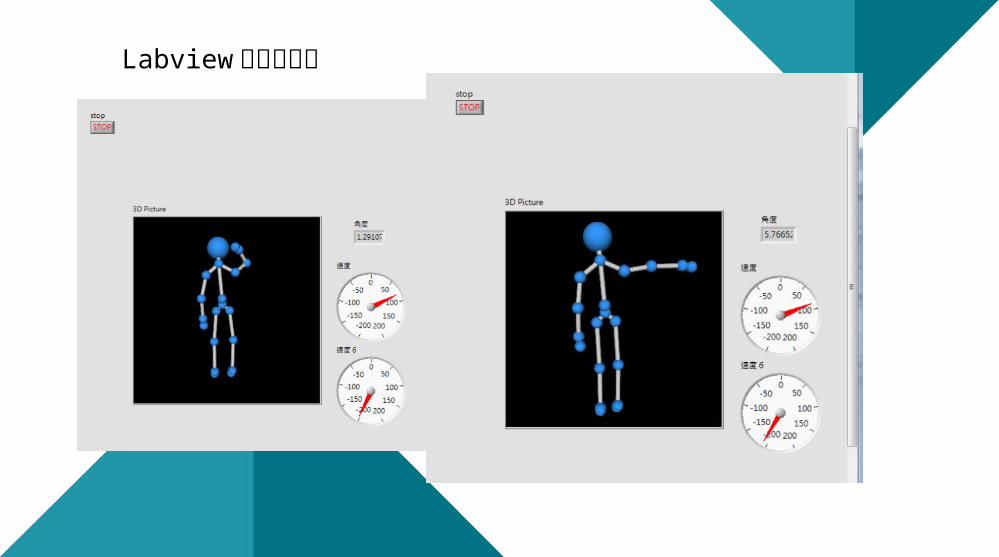
Labview 模擬與設計
THANKS FOR LISTENING





























