Embed Size (px)
Citation preview

Copyright © 2016 TIS Inc. All rights reserved.
ROS の紹介と Pepper での活用例
TIS 株式会社戦略技術センターAI 技術推進室
古賀 勇多
2016 年 4 月 26 日 ロボアプリパートナーオフ会 LT

Copyright © 2016 TIS Inc. All rights reserved. 2
自己紹介
名前:古賀 勇多(こがゆうた)
所属: TIS 株式会社 戦略技術センター
AI 技術推進室
業務:自律移動ロボット、機械学習の技術検証

Copyright © 2016 TIS Inc. All rights reserved. 3
本日の内容
・ ROS の紹介
・ Pepper + ROS 活用例の紹介

Copyright © 2016 TIS Inc. All rights reserved. 4
本日の内容
・ ROS の紹介
・ Pepper + ROS 活用例の紹介

Copyright © 2016 TIS Inc. All rights reserved. 5
ROS とは
・ロボット開発のためのオープンソースのフレームワーク
・欧米を中心に利用者・開発者数が急速に増加中( 2010 年位〜)
・活用例)産業用ロボット、サービスロボット、自動運転研究 (移動、操作、認識が絡む分野)
参考: ROS 8 Year Montage https://vimeo.com/146183080

Copyright © 2016 TIS Inc. All rights reserved. 6
ROS を使うメリット
ROS の膨大な資産を使って、
高性能なロボットを素早く開発できる

Copyright © 2016 TIS Inc. All rights reserved. 7
機能と開発ツール
機能 開発ツール
• 幅広い HW 対応、ライブラリやツールとの連携、高度なアルゴリズムをもった機能の提供
• 可視化、デバッグ、起動、デプロイ
• ロボット開発に必要なものは大体揃っている
数千にのぼる追加機能・ツールを世界中の大学・企業・研究機関がオープンソースで公開している

Copyright © 2016 TIS Inc. All rights reserved. 8
本日の内容
・ ROS の紹介
・ Pepper + ROS 活用例の紹介

Copyright © 2016 TIS Inc. All rights reserved. 9
Pepper の機能拡張
Web API (クラウドサービス)を使う
Microsoft Oxford, Google Speech API, Google Cloud Vision API, ...
ROS の機能群(パッケージ)を使う 今回はココを紹介
Choregraphe のボックスや、配布されているボックスライブラリを使う

Copyright © 2016 TIS Inc. All rights reserved. 10
2015/06/15 のニュースリリース
2015 年 6 月 15 日 Pepper が ROS に正式対応!http://www.softbank.jp/robot/news/developer/20150615a/

Copyright © 2016 TIS Inc. All rights reserved. 11
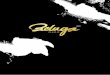
Pepper が ROS に対応?
Pepper 自体が何か変わったわけではない
Naoqi-ROS ブリッジにより、ROS の資産 = 豊富な機能群・ツール etcを利用できるようになった
Naoqi-ROSブリッジノード群
ROS の豊富な機能群
Naoqi-API アクセス

Copyright © 2016 TIS Inc. All rights reserved. 12
注意
・ Pepper ノードは Naoqi-API の一部機能しかブリッジできていない
・ Pepper の ROS 対応は、まだまだはじまったばかり

Copyright © 2016 TIS Inc. All rights reserved. 13
現在 Pepper + ROS で
できること/できないこと

Copyright © 2016 TIS Inc. All rights reserved. 14
できること
・センサデータ取得、移動、発話、モーション
・ MoveIt! 、 Gazebo 利用 ( 一部問題あり?)

Copyright © 2016 TIS Inc. All rights reserved. 15
応用例
・ Pepper のレーザーセンサを利用して
移動のための2次元地図を作成する
・ディープラーニングを利用して、 Pepper が見た物体の名前を喋らせる
http://tech-sketch.jp/2016/01/ros-docker-2.html

Copyright © 2016 TIS Inc. All rights reserved. 16
できないこと
・センサ系に難あり(デプスカメラ、レーザーセンサ)
・対話や音声認識(今後できる可能性あり)

Copyright © 2016 TIS Inc. All rights reserved. 17
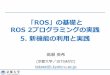
センサ系に難あり
精度が向上すれば室内を Pepper がより自由に動ける可能性あり
レーザスキャンデータ デプスカメラデータ
曲がっている 天井が歪んでいる

Copyright © 2016 TIS Inc. All rights reserved. 18
まとめ
Pepper でこんなこともできるようになる .. かも
Nao humanoid navigates autonomously using a depth camera (Xtion / Kinect)
・ ROS の資産を活用することで、 Pepper の機能を拡張できる
・ Pepper の今後の ROS 対応に乞うご期待

THANK YOU