Embed Size (px)
Citation preview

ЛАБОРАТОРНА РОБОТА 1
З ДИСЦИПЛІНИ
«ОСНОВИ РОЗРАХУНКУ Й КОНСТРУЮВАННЯ ТИПОВИХ МАШИН»


3
1. Метричний синтез та кінематичний аналіз кривошипно-коромислового чотириланкового механізму.
Завдання 1: Спроектувати кривошипно-коромисловий чотириланковий
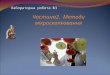
механізм, в якому обертальний рух кривошипа перетворюється в коливальний рух коромисла за гармонічним законом ψі = k·sin (φi + φ0). При цьому потрібно забезпечити, щоб пряма лінія, що з’єднує крайні точки траєкторії коромисла, проходила б через вісь обертання кривошипа. Прийняти, що вісь обертання кривошипа знаходиться в точці 1, а вісь коливання коромисла – в точці 4 (рис. 1.1). Кривошип здійснює рівномірний обертальний рух проти годинникової стрілки. Коромисло при повороті у крайнє (дальнє від осі кривошипа) положення складає з віссю абсцис кут β, який відраховується від осі абсцис проти годинникової стрілки. Допустимий кут тиску в кінематичній парі шатун-коромисло [Θ] ≤ 40°. Перевірити синтезований механізм за теоремою Ґрасґофа. Визначити функцію положення, аналоги кутової швидкості та кутового прискорення, кутові швидкості та кутові прискорення точок 2 та 3 синтезованого механізму за допомогою програми, створеної в середовищі математичного процесора MathCAD для розрахунку циклових механізмів. Результати кінематичного розрахунку механізму привести у вигляді таблиці даних та у вигляді графіків. Виконати анімацію (візуалізацію) кінематичної схеми механізму в MathCAD.
Таблиця 1.1. Вихідні дані для метричного синтезу та кінематичного аналізу
Координати стояків, мм Ва-рі-ант
Початко-вий кут повороту кривошипа
(φ0), радіани
Кут крайнього положення коромисла
(β), радіани
Амплітуда коливань
(k), радіани
Варіант складан-ня меха-нізму (W)
Кутова швид-кість криво-шипа
(ω1), с-1 Х1 Y1 Х4 Y4 1 0 3,4034 0,2182 +1 52,4 –5 –30 25 100 2 0,2618 4,7997 0,2618 +1 57,6 140 10 25 30 3 0,5236 5,1487 0,2618 +1 62,8 90 80 –35 65 4 0,7854 4,1888 0,1309 –1 68,1 10 5 100 45 5 1,0472 4,1015 0,1745 –1 73,3 15 20 115 25 6 1,3090 3,8397 0,2182 –1 78,5 20 10 125 –25 7 1,5708 1,3963 0,1745 +1 83,8 10 25 110 –75 8 1,8362 0,8727 0,3054 +1 89,0 –10 85 50 –15 9 2,0944 5,4105 0,2618 +1 94,2 75 5 –50 –15
10 2,3562 2,5307 0,3491 –1 99,5 25 65 –30 –45 11 2,6180 1,1345 0,1745 –1 104,7 5 25 –90 –15 12 2,8798 0,3491 0,3054 –1 110,0 5 15 –40 95 13 3,1416 2,0944 0,3054 +1 115,2 –15 10 135 5 14 3,4034 4,0143 0,1309 +1 120,4 30 –110 45 35 15 3,6652 2,0944 0,0873 +1 125,7 –30 40 115 –65 16 3,9270 3,4034 0,2182 –1 130,9 –10 50 80 –35 17 4,1888 0,0873 0,1309 –1 136,1 90 –50 –20 65 18 4,4506 0,8727 0,1745 –1 141,4 80 10 –50 15 19 4,7124 1,7453 0,3054 +1 146,6 –70 10 50 –15 20 4,9742 0,5236 0,1745 +1 151,8 –10 70 –30 –45 21 5,2360 3,9270 0,2182 +1 157,1 –10 –40 –30 55

4
Рис. 1.1. Схема кривошипно-коромислового механізму
ПРИКЛАД ВИКОНАННЯ ЗАВДАННЯ 1
1.1. Виконаємо метричний синтез механізму Задані умови для метричного синтезу: 1. Закон руху коромисла 3-4: ψі = k·sin (φi + φ0). 2. Початковий кут повороту кривошипа 1-2: φ0 = 1,5708 рад = 90°. 3. Кут, який відповідає крайньому положенню коромисла 3-4: β = 1,3963 рад = 80°. 4. Амплітуда коливального руху коромисла: k = 0,2182 рад = 12,5°. Обмеження на умови для метричного синтезу: 1. Допустимий кут тиску в кінематичній парі шатун-коромисло: [Θ] ≤ 40°. 2. Варіант складання механізму: W = +1. 3. Координати стояка 1: Х1 = 5 мм; Y1 = 20 мм. 4. Координати стояка 4: Х4 = 100 мм; Y4 = –75 мм. 5. Працездатність (провертаємість) механізму 34231412 llll +≤+ ; min12 =l ; max14 =l У результаті метричного синтезу необхідно визначити: довжину кривошипа 1-
2, довжину шатуна 2-3 та довжину коромисла 3-4. При цьому згідно із завданням обертальний рух кривошипа 1-2 повинен
перетворюватися на коливальний рух коромисла 3-4. Для цього потрібно забезпечити виконання умови теореми Ґрасґофа: сума довжин найменшої та найбільшої ланок повинна бути менше або дорівнювати сумі довжин двох інших ланок. При цьому найменшою ланкою є кривошип 1-2, найбільшою – стояк 1-4, тобто:
34231412 llll +≤+ ; min12 =l ; max14 =l ; (1.1)

5
де l12 – довжина кривошипа 1-2; l23 – довжина шатуна 2-3; l34 – довжина коромисла 3-4; l14 – довжина стояка 1-4.
Послідовність виконання метричного синтезу 1. Визначаємо повний кут коливання ψmax коромисла 3-4. Для цього будуємо
графік залежності ψ = f (φ) згідно з гармонічним законом руху коромисла ψі = k·sin (φi + φ0) (рис. 1.2), приймаючи крок кута повороту кривошипа Δφ = 30°. Згідно з цим графіком:
ψmax = 2·k = 2·0,2182 рад = 0,4364 рад = 25°. (1.2)
φi , град. ψі , град.
90 12,5120 10,8150 6,3180 0,0210 -6,3240 -10,8270 -12,5300 -10,8330 -6,3360 0,0390 6,3420 10,8450 12,5 -15
-10
-5
0
5
10
15
90 120 150 180 210 240 270 300 330 360 390 420 450
φ, градуси
ψ, градуси
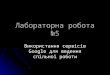
Рис. 1.2. Графік закону руху коромисла 3-4 2. Довільно вибираємо початок координат та будуємо стояки 1 та 2 за заданими
координатами X1, Y1 та X4, Y4 (рис. 1.3). 3. З точки 4 під кутом β = 80° від осі Х проти годинникової стрілки відкладаємо
промінь 4-31, на якому буде лежати точка 31 коромисла 3-4 при його першому заданому крайньому положенні. З точки 4 під кутом ψmax = 25° від променя 4-31 проти годинникової стрілки відкладаємо промінь 4-32, на якому буде лежати точка 32 коромисла 3-4 при його другому крайньому положенні. З точки 4 відкладаємо бісектрису 4-3' кута ψmax. З точки 1 проводимо перпендикуляр до бісектриси 4-3'. Продовжуємо цей перпендикуляр до перетину з променем 4-31. Отримані таким чином відрізки 314 = 324 визначають довжину коромисла 3-4 механізму. Відрізок 1-31 дорівнює сумі довжин шатуна та кривошипа, а відрізок 1-32 – їхній різниці, тобто:
1223131lll += ; 1223132
lll −= . (1.3)

6
Оскільки синтезований механізм відтворює симетричний закон руху коромисла, при якому лінії, що проведені з точки 1 через точки 32 та 31, співпадають одна з одною, то довжина кривошипа дорівнює половині відрізка 3132, тобто:
96,21292,43
22133
12 ===l
l мм. (1.4)
Довжину шатуна визначаємо за однією з формул (1.3):
77,9096,2173,112121323 1=−=−= lll мм. (1.5)
Записуємо параметри синтезованого механізму у таблицю 1.2. 4. Вимірюємо довжину коромисла, тобто відстань між точкою 31 (або 32) та
точкою 4 (рис. 1.3); l34 = 101,46 мм.
Рис. 1.3. Розрахункова схема до метричного синтезу кривошипно-коромислового механізму

7
Таблиця 1.2. Параметри кривошипно-коромислового механізму
Параметр Позначення Значення Абсциса точки 1 Х1 5 мм Ордината точки 1 Y1 20 мм Довжина кривошипа l12 21,96 мм Довжина шатуна l23 90,77 мм Довжина коромисла l34 101,46 мм Абсциса точки 4 X4 100 мм Ордината точки 4 Y4 –75 мм Варіант складання W +1
Виконуємо перевірку отриманого механізму за теоремою Ґрасґофа згідно з
виразами (1.1):
34231412 llll +≤+ ; 46,10177,9035,13496,21 +<+ ;
23,19231,156 < . Таким чином, теорема Ґрасґофа виконується і синтезований механізм
задовольняє всім умовам завдання 1. Виконаємо перевірку кута тиску в кінематичні парі шатун-коромисло (точка 3)
за один оберт кривошипа. Для цього необхідно побудувати 12 положень механізму.
1.2. Виконаємо кінематичний аналіз синтезованого механізму Вихідні дані для кінематичного аналізу: 1. Абсциса кінематичної пари 1: Х1 = 5 мм 2. Ордината кінематичної пари 1: Y1 = 20 мм 3. Довжина кривошипа 1-2: l12 = 21,96 мм 4. Початкове положення кривошипа 1-2: φ0 = 90° 5. Кутова швидкість кривошипа 1-2: ω1 = 78,5 с-1 6. Кутове прискорення кривошипа: ε1 = 0 с-2 7. Довжина шатуна 2-3: l23 = 90,77 мм 8. Довжина коромисла 3-4: l34 = 101,46 мм 9. Варіант складання механізму: W = +1 10. Абсциса кінематичної пари 4: Х4 = 100 мм 11. Ордината кінематичної пари 4: Y4 = –75 мм 12. Загальна кількість точок (центів кінематичних пар (КП) для дослідження: КП 2 (кривошип-шатун); КП 3 (шатун-коромисло). 13. Кількість положень механізму: 12 У результаті кінематичного аналізу механізму визначимо функції положення
характерних його точок, їхні аналоги кутової швидкості та кутового прискорення,

8
кутову швидкість та кутове прискорення за один оберт кривошипу. Кінематичний розрахунок проводитимемо за допомогою програми, створеної в
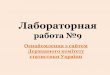
середовищі процесора MathCAD для розрахунку циклових механізмів. Скористаємося методом Зинов’єва В. А. для кінематичного аналізу механізмів. Позначимо кінематичні пари та характерні точки досліджуваного механізму
(рис. 1.4) арабськими цифрами, а саме: 1 – стояк-кривошип, 2 – кривошип-шатун, 3 – шатун-коромисло, 4 – коромисло-стояк. Таким чином, досліджуваний механізм складається з чотирьох обертальних кінематичних пар та містить такі рухомі ланки: 1-2 – кривошип, 2-3 – шатун, 3-4 – коромисло.
Функція положення φ2(φ1) шатуна 2-3 (рис. 1.4), що відраховується від осі Х, визначається за формулою:
( ) ( )( )
( )( )( ) 1
12423
2124
234
223
141112
111212 2
arccoscos
sinarctg SS
Sll
lllWll
lϕ+
⎥⎥⎦
⎤
⎢⎢⎣
⎡
ϕ⋅ϕ+−
⋅+⎥⎦
⎤⎢⎣
⎡−ϕ−ϕ
ϕ−ϕ=ϕϕ , (1.6)
де ( ) ( )111412
214
212124 cos2 Slllll ϕ−ϕ−+=ϕ ,
ϕ1 – кут повороту кривошипа 1-2, що відраховується від осі Х (додатний
напрямок проти годинникової стрілки); ϕS1 – кут нахилу вектора 1-4 до осі Х,
⎪⎪
⎩
⎪⎪
⎨
⎧
<−⎟⎟⎠
⎞⎜⎜⎝
⎛ −
≥−⎟⎟⎠
⎞⎜⎜⎝
⎛ −
=ϕ
.0якщоarccos-
,0якщоarccos
1414
14
1414
14
1
YYl
XX
YYl
XX
S . (1.7)
l14 – відстань між стояками 1 і 4, м, ( ) ( )214
21414 YYXXl −+−= ;
W – коефіцієнт, який визначає варіант складання механізму. Якщо обхід двоповодкової групи першого виду 2-3-4 (що утворена шатуном 2-3 та коромислом 3-4) (рис. 1.3) здійснюється від точки 2 через точку 3 до точки 4 за годинниковою стрілкою, то 1+=W , якщо проти, – то 1−=W ;
Х1, Y1 – координати точки 1 відносно початку координат ХY. Для визначення кута ϕS1 зручно користуватися у MathCAD вбудованою
функцією atan2(x,y), де x та у – координати точки, яка визначає кут, що відраховується від осі ОХ до точки (x,y). Таким чином, можемо записати:
( ) ( )[ ]14141 ,2: YYXXataпS −−=ϕ .
Функція положення φ3(φ1) коромисла 3-4 (рис. 1.4), що відраховується від осі Х,
визначається за формулою:

9
( ) ( )( )
( )( )( ) 1
12434
2124
234
223
141112
111213 2
arccoscos
sinarctg SS
Sll
lllWll
lϕ+
⎥⎥⎦
⎤
⎢⎢⎣
⎡
ϕ⋅ϕ−−
⋅+⎥⎦
⎤⎢⎣
⎡−ϕ−ϕ
ϕ−ϕ=ϕϕ . (1.8)
Рис. 1.4. Розрахункова схема до кінематичного аналізу кривошипно-
коромислового механізму Кут тиску θ в кінематичній парі шатун-коромисло (точка 3) залежить від кута
повороту (φ1) кривошипа й визначається як різниця кутів повороту шатуна 2-3 (φ2), коромисла 3-4 (φ3) та кута π/2, тобто:
( )2323π
−ϕ−ϕ=θT для π=ϕ 2...01 ( 12,...1,301 ==°=ϕΔ nni ). (1.9)
Кутові швидкості (ωі) будь-якої ланки механізму:
111
ω⋅=ω⋅ϕϕ
=ω Ii
ii i
dd , (1.10)
де I
ii – перша передаточна функція (передаточне відношення веденої до ведучої

10
ланки) або аналог швидкості і-ої ланки; ω1 – кутова швидкість кривошипа. Кутові прискорення (εі) будь-якої ланки механізму:
1211
1
212
1
2ε⋅+ω⋅=ε⋅
ϕϕ
+ω⋅ϕϕ
=ε Ii
IIi
iii ii
dd
dd , (1.11)
де II
ii – друга передаточна функція (аналог прискорення і-ої ланки); ε1 – кутове прискорення кривошипа. Координати будь-якої точки ланки механізму зручно представляти в матричній
формі:
i
i
ii
ii
i
i
i
i
yx
YX
YX
⋅ϕϕϕ−ϕ
+=cossinsincos
0
0 , (1.12)
де Xi, Yi – координати точок, що досліджуються, які належать i-ланці, в нерухомій системі координат XY;
X0i, Y0i – координати точок ланки, що приймаються за початок координат рухомої системи координат xy, в нерухомій системі координат XY;
xi, yi – координати точок ланки, що досліджуються, в рухомій системі координат xy;
ii
ii
ϕϕϕ−ϕ
cossinsincos
– матриця повороту;
φі – кут нахилу рухомої системи координат xy відносно нерухомої XY. Тоді координати точки 2 у системі координат XY запишуться так:
0cossinsincos 12
11
11
1
1
2
2 lYX
YX
⋅ϕϕϕ−ϕ
+= , (1.13)
Координати точки 3 у системі координат XY:
0cossinsincos 23
33
33
4
4
3
3 lYX
YX
⋅ϕϕϕ−ϕ
+= . (1.14)
! Як відомо швидкість – це перша похідна по часу від переміщення, а прискорення – друга похідна по часу. При розрахунку в програмі MathCAD для відшукання похідних використовується вбудована функція диференціювання.
Лінійні швидкості точок механізму в проекціях на осі координат XY:
11ω⋅
ϕ=
ddXV i
Xi ; (1.15)

11
11ω⋅
ϕ=
ddYV i
Yi . (1.16)
Лінійні прискорення точок механізму в проекціях на осі координат XY:
11
212
1
2ε⋅
ϕ+ω⋅
ϕ=
ddX
dXda ii
Xi ; (1.17)
11
212
1
2ε⋅
ϕ+ω⋅
ϕ=
ddY
dYda ii
Yi . (1.18)
Створення функцій користувача у програмі MathCAD Незважаючи на досить широкий набір вбудованих функцій у програмі
MathCAD, дуже часто виникає необхідність розширити його новими функціями, що мають інтерес для користувача.
Так звані «функції користувача» вводяться відповідно до виразу (1.19):
Ім’я функції (Список аргументів) : = Вираз, (1.19)
де Ім’я функції – будь-який ідентифікатор; Список аргументів – перелік змінних, які використані у виразі і записані через
кому; Вираз – будь-який вираз, що містить доступні системі оператори й функції з
операндами й аргументами, зазначеними в списку параметрів. Визначимо в програмі MathCAD низку так званих «функцій користувача»,
використання яких значно прискорить процес створення математичних моделей важільних механізмів у звичній для інженерних розрахунків формі.
Для виводу проекцій будь-якого вектора по осях обраної декартової системи координат уведемо наступні параметри:
Х:= ORІGІN; Y:= ORІGІN + 1; Z:= ORІGІN + 2, (1.20)
де ORІGІN – в MathCAD вбудована функція, від якої залежить порядковий номер першого елемента у векторі.
! Як відомо програма MathCAD (як і багато аналогічних математичних пакетів) при роботі з кутовими величинами вимагають введення величини кута в радіанах, що трохи ускладнює звичні математичні розрахунки. Крім того, у програмі MathCAD є ряд вбудованих тригонометричних функцій, що також відрізняються від звичного математичного запису.
Визначимо звичні математичні записи тригонометричних функцій, які будуть
використані в подальших розрахунках:
( ) ( ) 1degacos:arccos −⋅= xx ; ( ) ( )degcos:cos ⋅= xx ;

12
( ) ( ) 1degasin:arcsin −⋅= xx ; ( ) ( )degsin:sin ⋅= xx ; (1.21) ( ) ( ) 1degatan:arctg −⋅= xx ; ( ) ( )degtan:tg ⋅= xx ;
де deg – в MathCAD вбудована функція для переведення градусів у радіани й назад.
Згідно з (1.19) запишемо в якості функцій користувача функції положення шатуна та коромисла, виражені через кути повороту шатуна (φCHATUN) та коромисла (φKOROMYSLO):
( ) ( )( )
4444 34444 21444 3444 2143421
Виразаргументів Списокфункції яІм'
cossinarctg:,,,,,, +⎥
⎦
⎤⎢⎣
⎡−ϕ−ϕ⋅
ϕ−ϕ⋅=ϕϕϕ
drrWdcLr
S
SSCHATUN (1.22)
( )( )( )
44444444444 344444444444 21Вираз
22
2222
cos22
cos2arccos SS
S
drdrL
drdrcLW ϕ+⎥⎥⎦
⎤
⎢⎢⎣
⎡
ϕ−ϕ⋅⋅⋅−+⋅⋅
ϕ−ϕ⋅⋅⋅−++−⋅+
( ) ( )( )
( )( )( )
44444444444 344444444444 21
44444 344444 21444 3444 214434421
Вираз
22
2222
Виразаргументів Списокфункції яІм'
cos22
cos2arccos
cossinarctg:,,,,,,
SS
S
S
SSKOROMYSLO
drdrc
drdrcLW
drrWdcLr
ϕ+⎥⎥⎦
⎤
⎢⎢⎣
⎡
ϕ−ϕ⋅⋅⋅−+⋅⋅
ϕ−ϕ⋅⋅⋅−+−−⋅+
+⎥⎦
⎤⎢⎣
⎡−ϕ−ϕ⋅
ϕ−ϕ⋅=ϕϕϕ
(1.23)
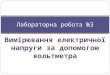
Позначення параметрів φ, r, L, c, d та φS відповідають позначенням на рис. 1.5. Запишемо в якості функцій користувача координати будь-якої точки механізму
залежно від кута повороту головного вала (1.12):
( ) ( ) ( )( ) ( ) y
xYX
yxYXS ⋅ϕϕϕ−ϕ
+=ϕcossinsincos
,,,, . (1.24)
! Оскільки тригонометричні функції, які використовуються для розрахунків, позначені з кутовими величинами, що виражені в градусах, то кутові швидкості та кутові прискорення, розмірність яких в [рад/с] та [рад/с2], необхідно перевести в розмірність [град/с] та [град/с2].
Кутова швидкість ведучої ланки:
1deg30
: −⋅⋅π
=ωn [град/с], (1.25)
де п – частота обертання ведучої ланки в [об/хв].

13
Рис. 1.5. Розрахункова кінематична схема механізму з параметрами (списком аргументів) φ, r, L, c, d, φS та W для визначення «функцій користувача» Кутове прискорення ведучої ланки:
1deg: −⋅ε=ε [град/с2]. (1.26)
! Для того, щоб отримати дійсні значення кутової швидкості та кутового прискорення відповідно в [рад/с] та [рад/с2] необхідно отримані значення в [град/с] та [град/с2] помножити та вбудовану в MathCAD функцію deg. Для визначення дійсного значення аналогів кутових прискорень потрібно їхні отримані значення помножити на deg–1.
Як узагальнена координата виступатиме кут повороту ведучого кривошипа (φ1),
тоді крок (Δφ1) зміни узагальненої координати для положень механізму, що розраховуються, можна знайти як:
POLN0max
1 : ϕ−ϕ=ϕΔ , (1.27)
де φmax – кінцеве значення кута повороту ведучого кривошипа;

14
NPOL = 12 – кількість положень механізму, для яких здійснюється кінематичний аналіз.
Задаємося границями зміни узагальненої координати (визначаємо так звану ранжирувану змінну):
max1001 ..,: ϕϕΔ+ϕϕ=ϕ . (1.28)
Відповідно до кінематичної схеми, наведеної на рис. 1.5, прив’язка кута
повороту ведучої ланки здійснюється до осі X, а сам поворот здійснюється проти ходу годинникової стрілки, тоді, використовуючи функції користувача, можна записати:
( ) ( )1114342312112 ,,,,,,: WLLLL SCHATUN ϕϕϕ=ϕϕ ; (1.29) ( ) ( )1114342312113 ,,,,,,: WLLLL SKOROMYSLO ϕϕϕ=ϕϕ ; (1.30)
( ) ( )mLYXSS 0,,,,: 1211112 ϕ=ϕ ; (1.31) ( ) ( )( )mLYXSS 0,,,,: 34441313 ϕϕ=ϕ . (1.32)
Результати розрахунку завдання 1 Результати кінематичного розрахунку кривошипно-коромислового механізму
представлені в табл. 1.3. За результатами кінематичного розрахунку будуємо графіки траєкторій точок 2
та 3, їхніх функцій положення, функції кутових швидкостей та функції кутових прискорень ланок, які представлені на рис. 1.6., рис. 1.7, рис. 1.8 та рис. 1.9, відповідно. При побудові графіків за нульове положення прийняте положення кривошипа, що відповідає його повороту на кут φ0.
Таблиця 1.3. Результати кінематичного розрахунку кривошипно-
коромислового механізму
Координати точок Функція положення
ланок
Кутові швидкості
Кутові прискорення φ1
θт3 X2, мм
Y2, мм
X3, мм
Y3, мм φ2 φ3 ω2, с-1 ω3, с-1 ε2, c-2 ε2, c-2
90° 13° 5,00 41,96 94,41 26,31 -12,43° 13,16° -1,074 17,182 1189,201 -166,450 120° 18° -5,98 39,02 83,72 25,15 -11,29° 19,23° 7,082 13,926 1221,593 -768,398 150° 18° -14,02 30,98 76,46 23,69 -7,11° 23,42° 14,507 7,662 940,027 -1049,963 180° 13° -16,96 20,00 73,76 23,01 -0,60° 24,99° 18,835 0,578 312,983 -1042,668 210° 5° -14,02 9,02 75,59 23,48 6,67° 23,92° 18,311 -6,063 -483,481 -946,786 240° 5° -5,98 0,98 81,61 24,78 12,70° 20,44° 12,362 -12,014 -1287,737 -824,499 270° 13° 5,00 -1,96 91,33 26,09 15,50° 14,91° 1,667 -16,591 -1840,272 -484,628 300° 18° 15,98 0,98 103,11 26,41 13,77° 8,24° -10,512 -17,357 -1651,235 338,828 330° 18° 24,02 9,02 113,26 25,59 8,02° 2,49° -18,453 -11,608 -647,265 1342,799 360° 13° 26,96 20,00 117,60 24,92 0,61° 0,02° -19,203 -0,946 350,223 1705,867 390° 5° 24,02 30,98 114,62 25,40 -6,02° 1,72° -14,959 9,416 846,021 1309,259 420° 5° 15,98 39,02 105,85 26,29 -10,56° 6,70° -8,561 15,814 1049,944 586,635 450° 13° 5,00 41,96 94,41 26,31 -12,43° 13,16° -1,074 17,182 1189,201 -166,450

15
-20
-10
0
10
20
30
40
50
-20 -10 0 10 20 30 40 50 60 70 80 90 100 110 120 130
X, мм
Y, мм
точка 2 точка 3
Рис. 1.6. Графік траєкторій точок 2 та 3
-15
-10
-5
0
5
10
15
20
25
30
90 120 150 180 210 240 270 300 330 360 390 420 450
Кут повороту кривошипа, градуси
Функція
пол
оження
ланок
, градуси
шатун 2-3 коромисло 3-4
Рис. 1.7. Графік функції положення шатуна 2-3 та коромисла 3-4

16
-25
-20
-15
-10
-5
0
5
10
15
20
25
90 120 150 180 210 240 270 300 330 360 390 420 450
Кут повороту кривошипа, градуси
Кутова
шви
дкість
ланок
, 1/с
шатун 2-3 коромисло 3-4
Рис. 1.8. Графік кутових швидкостей шатуна 2-3 та коромисла 3-4
-2500
-2000
-1500
-1000
-500
0
500
1000
1500
2000
90 120 150 180 210 240 270 300 330 360 390 420 450
Кут повороту кривошипа, градуси
Кутове
при
скор
ення
ланок
, 1/с
2
шаун 2-3 коромисло 3-4
Рис. 1.9. Графік кутових прискорень шатуна 2-3 та коромисла 3-4

17
Для перевірки правильності визначення функцій положення в програмі MathCAD виконаємо анімацію кінематичних схем.
Анімація (візуалізація) кінематичних схем Під візуалізацією будемо розуміти побудову кінематичних схем важільних
механізмів на 2D або 3D графіках програми MathCAD у статичному стані, а під анімацією – створення послідовності анімаційних кадрів кінематичної схеми важільного механізму в процесі автоматичної зміни узагальненої координати.
! Анімація (або «оживлення») графіків – нова можливість, що введена в останні версії MathCAD. Раніше таку можливість забезпечували більш потужніші та громіздкі програми MathLab та Mathematica. У MathCAD анімація використовується більш удало – тут задіяна стандартна технологія створення анімаційних файлів із розширенням *.avi і їхнє відтворення за допомогою програмної системи Microsoft Video.
Як відомо, на кінематичних схемах важільних механізмів усі ланки
представляються у вигляді відрізків, що з’єднують дві характерні точки важільного механізму. Тому для управління подальшою анімацією (візуалізацією) кінематичних схем важільних механізмів у програмі MathCAD уведемо функцію користувача, яку назвемо «функцією анімації (візуалізації)». Ця функція користувача дозволить здійснювати побудову на 2D графіках програми MathCAD лінії між двома відомими векторами-точками:
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛=
K
K
VV
KVVLine2
121 :,, , (1.33)
де V1 та V2 – два вектори-точки між якими потрібно провести лінію; К – параметр, який управляє виводом координати Х або Y на 2D графіку (матричний індекс).
Візуалізація кінематичної схеми досліджуваного кривошипно-коромислового механізму представлена на рис. 1.10.
Для проведення анімації кінематичних схем важільних механізмів потрібно деякій допоміжній ранжируваній змінній присвоїти значення вбудованій в програму MathCAD функції FRAME. Апріорі значення параметра FRAME дорівнює нулю й змінюється з кроком 1. Але воно може мати будь-яке значення або входити до функціональної залежності. Бажано, щоб допоміжна ранжирувана змінна, яка вводиться для анімації, не використовувалася ніде в математичній моделі, що формується, наприклад:
°+°⋅= 9010: FRAMEF . (1.34)
Потім задається функція, в якій змінна FRAME повинна визначати її вигляд для
кожного кадру графіка, що анімується. При анімації (візуалізації) кінематичних схем важільного механізму у вигляді такої функції буде виступати так званий блок «анімації (візуалізації)» важільного механізму.
Блок анімації (візуалізації) є набором одиничних функцій анімації (візуалізації) (див. вираз (1.35)), що об’єднані по горизонталі в єдиний блок-матрицю. Причому

18
кожна одинична функція анімації (візуалізації) описує тільки одну лінію між двома точками кінематичної схеми важільного механізму, яку необхідно анімувати (візуалізувати). Так, використовуючи кінематичну схему важільного механізму (рис. 1.3), блок анімації (візуалізації) можна представити як:
( ) ( )( )KFPPLineKFL ,,:, 211 = ; ( ) ( ) ( )( )KFPFPLineKFL ,,:, 322 = ; (1.35) ( ) ( )( )KPFPLineKFL ,,:, 433 = ,
Як видно з виразів (1.35) при складанні блоку анімації (візуалізації) замість
використовуваної в математичній моделі узагальненої координати (у цьому випадку φ1 – кута повороту кривошипа 1-2) для кожної рухомої точки важільного механізму підставляється введена заздалегідь допоміжна ранжирувана змінна F. Таким чином допоміжна ранжирувана змінна F по суті є узагальненою координатою важільного механізму, що моделюється, границі якої задаються тільки при анімації (візуалізації). Тому при введенні допоміжної ранжируваної змінної у виразі (1.34) повинна бути узгоджена її розмірність із розмірністю дійсної узагальненої координати. Оскільки в нашому прикладі як узагальнена координата виступає кут повороту кривошипа в градусах, то допоміжна змінна повинна вводиться також у градусах.
Крім того, додаючи у виразі (1.34) до функції FRAME додаткове числове значення (що рівноцінно збільшенню узагальненої координати) можна змінити початкове положення кінематичної схеми важільного механізму в процесі її анімації (візуалізації) (в нашому прикладі початковий кут установки кривошипа φ0 = 90°).
Після складання блоку анімації (візуалізації) відповідно до виразу (1.35) його ліва частина розташовується по осях X й Y викликаного заздалегідь у програмі MathCAD декартового графіка, а параметр К заміняється відповідно до осі графіка на X або Y. Таким чином у результаті виконання вищенаведених дій на 2D графіку сформується умовна кінематична схема важільного механізму для одного (обумовленого виразом (1.34)) початкового положення (рис. 1.10).
Тепер щоб провести анімацію побудованої на 2D графіку кінематичної схеми важільного механізму необхідно вибрати команду Vіew → Anіmate. У результаті на екрані з’явиться діалогове вікно для завдання параметрів анімації. У вікні можна задати три основних параметри: початкове значення змінної FRAME, кінцеве значення змінної FRAME і частоту зміни кадрів. Як правило, початкове й кінцеве значення змінної FRAME відповідають границям зміни узагальненої координати (у нашому випадку – кута установки кривошипа φ1: від φ0 = 90° до φmax = 90°+360° = 450°) і повинні задаватися в цілих числах.
Далі слід виділити мишею потрібний фрагмент зображення (можна також виділити будь-яку частину графіка й навіть розташовані біля нього об’єкти, наприклад формули) і, клацнувши на кнопці Anіmate вікна анімації, почати створення послідовності анімаційних кадрів. При цьому анімаційні кадри будуть видні в області перегляду вікна Anіmate, а під цією областю можна спостерігати зміну змінної FRAME. По закінченні серії кадрів для перегляду з’явиться програвач анімаційних кадрів, після чого можна починати їхній перегляд.

19
! Переглядати можна не тільки графік, але й результати розрахунку. Для цього в зону анімації (візуалізації) повинні бути поміщені виведені розрахункові параметри, які нас цікавлять, а використовувана в них узагальнена координата повинна бути замінена на визначену виразом (1.34) допоміжну ранжирувану змінну F.
Рис. 1.10. Візуалізація кінематичної схеми механізму в програмі MathCAD