Embed Size (px)
Citation preview

И2’2004
СОДЕРЖАНИЕ
Редактор Э. К. Долгатов
Комп. верстка С. Ю. Кравченко
Подписано в печать 00.12.04 г.
Формат 60х84 1/8.
Бумага офсетная.
Гарнитура «Таймс».
Печать: ризограф.
Печ. л. 7,5.
Тираж 100 экз. Заказ .
Издательство
СПбГЭТУ «ЛЭТИ»
197376, Санкт-Петербург,
ул. Проф. Попова, 5
© СПбГЭТУ «ЛЭТИ», 2004
Редакционная коллегия:Н. В. Лысенко (председатель
редакционной коллегии)
А. М. Мончак (ответственный
секретарь)
В. В. Леонтьев, И. С. Минченко,
К. П. Наумов,
В. Ю. Суходольский,
Ю. С. Юрченко
СЕРИЯ «Радиоэлектроника и телекоммуникации
Вьюнг Х. Т., Давыдов В. С., Нгуен Т. Т., Тарасов С. П. Результаты
распознавания рыбных скоплений на фоне донных отражений
по гидролокационным сигналам ........................................................... 3
Аникин А. П. Модельно-параметрическая обработка многополосных
сигналов ................................................................................................. 6
Смирнов М. А., Сергиенко А. Б. Модификации алгоритма различения
речи и цифровых сигналов передачи данных ....................................... 10
Степанов В. А., Щербакова О. В. Падение плоской волны на границу
раздела сред с положительными и отрицательными материальными
параметрами........................................................................................ 16
Капитанова П. В., Симин А. В., Холодняк Д. В., Вендик И. Б.
Пассивные компоненты интегральных схем СВЧ, выполненные
по многослойной «сэндвич»-технологии ............................................ 22
Джамалудинов Д. М. Обнаружительная способность матричных ПЗС
в ближнем инфракрасном диапазоне .................................................. 26
Фальк Я. Формирование и обработка сигнала изображения
в цифровых
рентгенотелевизионных системах ........................................................ 30
Г. А. Костиков, М. И. Сугак. Характеристики плоских
слабонаправленных импульсных излучателей ..................................... 34
В. Н. Малышев, Б. Е. Лавренко Синтез и электродинамическое
моделирование встречно-штыревых фильтров .................................... 40
Нгуен Тхань Хынг. Повышение угловой точности фазово-фазовых
моноимпульсных РЛС
при сопровождении низколетящих над морем целей на проходе ........ 46
Буй Нгок Ми, Мамруков А. В. Моделирование изменения параметров
СВЧ-антенн, расположенных вблизи колеса паровой турбины ............ 53
Толоконников С. В., Рогова А. А., Соболев С. П. Свойства алгоритма
автономного контроля целостности спутниковой навигационной
информации для бортового оборудования навигации и посадки ........ 55

3
УДК 639.2.081.7; 681.883.41
Х. Т. Вьюнг, В. С. Давыдов, Т. Т. Нгуен, С. П. Тарасов
РЕЗУЛЬТАТЫ РАСПОЗНАВАНИЯ РЫБНЫХ СКОПЛЕНИЙ
НА ФОНЕ ДОННЫХ ОТРАЖЕНИЙ
ПО ГИДРОЛОКАЦИОННЫМ СИГНАЛАМ
Приведены результаты обработки гидролокационных сигналов от рыбных скопле-ний и дна, полученные в результате проведения морских испытаний в Каспийском море. Результаты подтвердили возможность распознавания гидролокационных сигналов, рассеянных на рыбных скоплениях и отраженных от участков дна, по методу между-цикловой корреляционной обработки сигналов.
Огибающая гидролокационного сигнала (эхосигнала), классификационные признаки, междуцикловая корреляционная обработка сигналов, знаковая корреляционная функция, гистограммы распределения
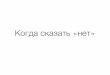
Морские испытания по распознаванию рыбных скоплений проводились в акватории
Каспийского моря с помощью гидролокационной приемно-излучающей аппаратуры Та-
ганрогского государственного радиотехнического университета (ТГРТУ) под руково-
дством д-ра техн. наук, профессора С. П. Тарасова. Использовался гидролокатор бокового
обзора (ГБО) с узкой характеристикой направленности в горизонтальной плоскости
и достаточно широкой характеристикой направленности в вертикальной плоско-
сти ( )50°∼ (рис. 1). Излучались короткие тональные зондирующие импульсы длительно-
стью з 50 мксτ = , пространственная длина которых 2
з з 2 3.75 10 мL c−= τ ≈ ⋅ (с – скорость
звука) была достаточна для разрешения отражений от неровностей грунта и рассеяний на
отдельных экземплярах рыбных скоплений. Принимаемые гидролокационные сигналы
( )s t детектировались, их огибающие ( )S t в цифровом виде регистрировались в памяти
компьютера и на магнитном носителе. В процессе испытаний предварительно были уста-
новлены гидролокационные сигналы от дна и появляющиеся в результате наведения ГБО
на рыбный косяк гидролокационные сигналы от рыб.
Обработка гидролокационных сигналов проводилась по методу междуцикловой кор-
реляционной обработки (МКО) сигналов, разработанному д-ром техн. наук, профессором
В. С. Давыдовым при участии канд. техн. наук Ю. С. Иванова [1]. В огибающих принятых
Дно
Антенна
эхолота
s Эхосигнал
от дна
Эхосигнал
от рыб
t
Рис. 1
© Х. Т. Вьюнг, В. С. Давыдов, Т. Т. Нгуен, С. П. Тарасов, 2004

4
гидролокационных сигналов ( )S t выделялись существенные локальные максимумы maxS
по специальному алгоритму, разработанному В. С. Давыдовым [2]. Выполнялась совмест-
ная обработка огибающих гидролокационных сигналов от рыб ( )рS t и от дна ( )дS t , при-
нятых в двух соседних циклах облучения подводной акватории (рис. 2).
На основе выделенных существенных максимумов формировались последователь-
ности равноамплитудных прямоугольных импульсов ( )д iq t и ( )р iq t соответственно для
огибающих гидролокационных сигналов от дна и от рыбных скоплений для первого цикла
облучения акватории и ( )д kq t и ( )р kq t – для второго цикла. Наличие импульса представ-
ляется единичным, а отсутствие – нулевым уровнем [3]. Затем между последовательно-
стями ( )д iq t и ( )д kq t , а также ( )р iq t и ( )р kq t в двух соседних циклах облучения вычис-
лялись знаковые корреляционные функции ( )дr j и ( )рr j по формуле
( ) ( ) ( )1
, 1
N
k i jk j
r j N q t q t−
−=
= ∑ ∩ .
За счет устойчивости временных положений { }iτ существенных максимумов maxS в
огибающих гидролокационных сигналов от дна ( )дS t и неустойчивости { }iτ в огибаю-
щих гидролокационных сигналов от рыб ( )рS t вследствие их подвижности ( )дr j превы-
шает ( )рr j . Однако ( )дr j также подвержены случайным флуктуациям за счет колебания
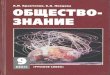
и движения судна. Гистограммы распределения случайных величин ( )дr j и ( )рr j пере-
крываются (рис. 3). Область перекрытия данных гистограмм можно уменьшать, манипу-
лируя пороговыми значениями, устанавливаемыми при выделении существенных локаль-
д r
S
р s
1
q t
1-й цикл облучения 2-й цикл облучения
ζ
r
р r
д s
0 t
t
р s ζд s
Рис. 2

5
ных максимумов maxS в огибающих гидролокационных сигналов ( )S t , и длительностью
прямоугольных импульсов ( )д iq t и ( )д kq t .
Для повышения точности распознавания рыбных скоплений на фоне донных отра-
жений необходимо использовать не две, а большее количество зондирующих посылок
(10…20). Тогда усредненные за несколько циклов обучения акватории ( )дr j и ( )рr j по-
зволяют с большей вероятностью распознавать рыбные скопления (рис. 3).
Выбор количества циклов облучения акватории для усреднения ( )дr j и ( )рr j зави-
сит от конкретных условий акватории (видов рыб, неровностей дна, волнения моря, водо-
измещения судна и т. д.). Полученные результаты обработки гидролокационных сигналов
для акватории Каспийского моря подтвердили возможность распознавания рыбных скоп-
лений на фоне донных отражений по методу междуцикловой корреляционной обработки
сигналов с усреднением за несколько циклов облучения.
СПИСОК ЛИТЕРАТУРЫ
1. Давыдов В. С., Иванов Ю. Г. Распознавание эхо-сигналов от тел сложной геометрической формы на
фоне случайных реверберационных помех // Тр. 6-й Междунар. конф. "Прикладные технологии гидроакусти-
ки и гидрофизики", СПб., 28-31 мая 2002 / ФГУП ЦНИИ "Гидроприбор". СПб., 2002. С. 75–77.
2. Давыдов В. С. Алгоритм выделения существенных максимумов в огибающей эхо-сигнала // Тез. II
Всесоюз. акуст. сем. "Методы, алгоритмы принятия решений". Л.: Судостроение, 1988. С. 65–66.
3. Давыдов В. С., Нгуен Т. Т., Хренов М. Ю. Взаимно корреляционная обработка гидролокационных
сигналов для повышения дальности распознавания рыбных скоплений на фоне донных отражений // Изв.
СПбГЭТУ "ЛЭТИ". Сер. "Радиоэлектроника и телекоммуникации". 2003. Вып. 2. С. 19–21.
T. H. Viewng, V. S. Davidov, T. T. Nguen, S. P. Tarasov
RESULTS OF RECOGNITION FISH CROWDS AT BACKGROUND REFLECTED SIGNALS BY MEANS OF HYDROLOCATION SIGNALS.
Results of processing hydrolocation signals from fish crowds and seabed, got at sea prov-ing in the Caspian Sea are described in this article. The possibility of identification hydroloca-tion signals dispersed at the fish crowds and seabed by means of between cycles correlation signal processing signals are confirmed by results.
Hydrolocation waveform signals envelope, classification characteristic, between cycles correlation signal processing, signum correlation function, density histogram
Статья поступила в редакцию 6 апреля 2004 г.
Рис. 3
W
0
0.25
20 30 40 50 60 70 80 r10
0 0 0 0
0.267 0.267
0.4
0.0670
Донные отражения
0.61r = .
Число циклов
обработки – 16
W
0
0.25
20 30 40 50 60 70 80 r10
0 0
0.417
0.083
0.125
0.083
0.1250.125
0.042
Рыбные скопления
0.25r = .
Число циклов
обработки – 25

6
УДК 621.396.62
А. П. Аникин
МОДЕЛЬНО-ПАРАМЕТРИЧЕСКАЯ ОБРАБОТКА
МНОГОПОЛОСНЫХ СИГНАЛОВ∗
Описываются основные принципы и характеристики обработки многополосных сигналов методом собственных векторов.
Амплитудно-частотно-манипулированный сигнал, задержка, статистические характеристики
Радиолокаторы метрового и декаметрового диапазонов работают в условиях сильной
загруженности и взаимовлияния радиоэлектронных средств (РЭС) различного назначения,
приводящих к высокому уровню непреднамеренных активных помех и обострению про-
блемы электромагнитной совместимости (ЭМС). Одним из путей улучшения ЭМС являет-
ся рациональное использование частотных ресурсов, в частности, за счет оптимального
размещения спектра зондирующего сигнала радиолокационной системы. В условиях не-
стационарности и существенной спектральной неравномерности помехового фона, дости-
гающей десятков децибел, целесообразно адаптивно распределять спектры сигналов РЭС
в участках диапазона (окнах) с пониженным уровнем помехового фона [1]. При этом де-
централизованное управление рабочими частотами в пределах выделенных участков или
сеток частот по результатам анализа электромагнитной обстановки (ЭМО), как правило,
эффективнее формального назначения частот, особенно для подвижных РЭС.
Обычно пределы перестройки несущей частоты зондирующего сигнала РЛС ограни-
чены организационными, технологическими или физическими факторами, поэтому оты-
скание свободных частотных окон для размещения спектров широкополосных зондирую-
щих сигналов более проблематично, чем для сигналов с относительно узким спектром.
Это приводит к известному противоречию, возникающему при выборе ширины спектра
зондирующего сигнала морских РЛС метрового и декаметрового диапазонов. С одной
стороны, для надежного обнаружения надводных целей на фоне взволнованной морской
поверхности необходимо разрешение по дистанции порядка 1 3 кмR∆ = … [1], для чего
требуется ширина спектра порядка 50 150 кГцf∆ = … . С другой стороны, для сигналов с
такой шириной спектра при существующих ограничениях практически невозможно оты-
скать свободный от помех участок диапазона.
Для преодоления этого противоречия следует распределять энергию широкополосного
зондирующего сигнала в случайно возникающих сравнительно узкополосных участках диапа-
зона с пониженным уровнем помехового фона. Эффективное использование частотных ресур-
сов достигается адаптивным распределением спектра сигнала с учетом информации панорам-
ного анализатора спектра помехового фона с многопороговой логикой выбора частотных окон.
Известны различные способы формирования и приема многополосных сигналов, до-
пускающие адаптивное распределение спектра в заданных участках частотного диапазона.
∗ Работа поддержана грантом Минобразования РФ по фундаментальным исследованиям в области электро-ники и радиотехники Т02-03.1-1533.
© А. П. Аникин, 2004

7
Остановимся на импульсном сигнале с последовательным изменением частоты на интерва-
ле когерентной обработки, хотя на практике возможно использование сигналов со слож-
ными законами модуляции. Длительность импульсов иτ положим равной максимальной
задержке полезного сигнала maxτ , период повторения импульсов и и2Т = τ , а минималь-
ный шаг перестройки по частоте (шаг частотной сетки) max1fδ = τ . При этом общая экви-
валентная ширина спектра сигнала fF N f∆ = δ , где fN – количество частот, используе-
мых для формирования многополосного сигнала. При согласованной обработке это число
составляет maxfN = τ ∆τ , где ∆τ – разрешение по задержке. Заметим, что при эквиди-
стантном заполнении спектрального диапазона без пропусков отклик согласованной обра-
ботки имеет форму периодической последовательности импульсов вида ( )sin x x с перио-
дом по оси τ, равным 1 fδ , и длительностью ( )1 fN fδ . Таким образом может быть сфор-
мирован многополосный сигнал, состоящий из сегментов с эквидистантно расположенны-
ми с шагом fδ поднесущими частотами внутри каждого сегмента, а сами сегменты распо-
лагаются по частоте неэквидистантно с учетом распределения частотных окон. Очевидно,
что минимальный шаг адаптации по времени, связанный с перераспределением частот по
спектру, должен быть не менее интервала анализа отраженных сигналов в приемнике РЛС.
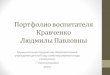
На рис. 1 изображен модуль спектра
типичного многополосного сигнала в от-
сутствие помех. В данном случае имеем
три полосы, расположенные неэквиди-
стантно друг относительно друга. Модели-
рование производилось при условии рав-
номерного помехового фона во всем диа-
пазоне частот, поэтому амплитуды всех трех сигнальных полос одинаковы. Помеха моде-
лировалась аддитивным белым гауссовским шумом с единичной дисперсией.
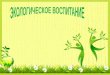
Целью обработки являлась оценка задержки сигнала. Обработка осуществлялась мо-
дельно-параметрическим методом собственных векторов. Структурная схема обработки
приведена на рис. 2 [2].
Очевидно, что последовательность данных [ ]прF nɺ будет иметь три сегмента, при-
годных для обработки в блоке "Метод собственных векторов". Можно обрабатывать все
три сегмента последовательно друг за другом, а на выходе получать некую среднюю
оценку ( ) ( )1
1 K
kk
P PK =
τ = τ∑⌢ ⌢
, где K – количество сегментов данных:
0.5
0 250 750 , кГцf500
F
Рис. 1
Прямое
преобразование
Фурье
Инверсно-
сопряженный
фильтр
Анализ
собственных
значений
[ ]вхS nɺ [ ]F nɺ [ ]прF nɺ [ ]P τ⌢
Рис. 2

8
( ) ( ) ( ) ( ) ( )1
1нн
p
k i ik ki L
P
−−
=
τ = τ τ ∑e v v e
⌢.
Здесь ( ) ( ) ( ){ }т1, exp 2 1 , , exp 2 1j f j N fτ = πτ ∆ πτ − ∆ e … – вектор гармонического сиг-
нала; iv – оценка i-го собственного вектора сегмента данных; индекс k означает принад-
лежность к k-му сегменту данных; L – предполагаемое количество сигналов с различны-
ми задержками и амплитудами во входном процессе [ ]вхS nɺ ; p – общее число собствен-
ных векторов сегмента данных; символы "н" "т"
и означают операции эрмитового сопря-
жения и транспонирования соответственно.
Такой подход к многосегментной обработке допустим, однако очень неэффективен,
поскольку все вычисления требуется повторять для каждого сегмента данных (в данном
случае – три раза).
Из анализа свойств многополосного сигнала видно [3], что сегменты данных, распо-
ложенные в последовательности [ ]прF nɺ и соответствующие полосам сигнала, взаимно
синфазны несмотря на неэквидистантное расположение самих полос. Поэтому все сегмен-
ты данных можно усреднить между собой либо усреднить составленные для них матрицы
данных:
1
1 K
kk
K =
= ∑R R ( kR – матрица данных, составленная для k-го сегмента). Тогда в
блоке "Метод собственных векторов" будет обрабатываться всего один сегмент данных,
что снизит время и сложность обработки в K раз по сравнению с первым подходом.
Этот подход к многосегментной обработке как наиболее эффективный и был под-
вергнут исследованию. Были построены некоторые статистические характеристики и про-
ведено сравнение с аналогичными характеристиками односегментной обработки много-
полосного сигнала, когда обрабатывалась только одна полоса сигнала (см. рис. 1).
В качестве рабочей статистики обнаружения была выбрана статистика превышения поро-
га оценкой ( )P τ⌢
. Перед статистическим моделированием для построения характеристик обна-
ружения необходимо было построить зависимость вероятности ошибки (ложной тревоги) ошP
от значения порога γ для каждого из сравниваемых алгоритмов (рис. 3).
Кривая 1 соответствует многосегментному методу обработки сигнала, кривая 2 – одно-
сегментному. Из рис. 3 видно, что применение многосегментного метода позволяет несколь-
ко снизить значение порога γ при фиксированной вероятности ложной тревоги по сравне-
нию с односегментным методом. Например, для обеспечения вероятности ложной тревоги
210
− значения порогов обнаружения для рассматриваемых методов отличаются в 1.395 раз.
Получив зависимость ( )ошP γ и установив γ обеспечивающим вероятность ложной
тревоги заданного уровня (в данном случае – 210
− ), можно получить набор зависимостей
вероятности обнаружения обнP от отношения сигнал/шум q (рис. 4). При проведении ста-
тистического моделирования во всех рассмотренных случаях были использованы следую-

9
щие параметры для метода собственных векторов: матрица данных имела размерность 5
столбцов на 18 строк, общее число собственных векторов 5, из которых 3 соответствуют
подпространству сигнала, а остальные – подпространству шума. Спектр сигнала приведен
на рис. 1. Сигнал имел случайную фазу, распределенную равномерно на интервале от 0 до
2π, и детерминированную амплитуду, численно равную q (белый шум имел единичную
дисперсию). По результатам моделирования, приведенным на рис. 4, можно утверждать,
что многосегментный алгоритм обнаружения сигнала (кривая 1) несколько проигрывает
односегментному (кривая 2) при указанных параметрах моделирования.
Несмотря на отмеченные недостатки многосегментной обработки она обладает от-
носительной простотой реализации и высоким быстродействием. Поэтому можно наде-
яться, что она найдет свое применение в задачах радиолокации и радионавигации.
В заключение следует сделать несколько замечаний относительно обобщенной схе-
мы обработки сигнала, изображенной на рис. 2. В [3] было отмечено, что при обработке
многополосных сигналов со спектрами, подобными рассмотренному в данной статье, мо-
жет быть опущен блок "Инверсно-сопряженный фильтр" и при этом внешний вид оценки
( )P τ⌢
не изменится. Это заключение справедливо лишь в том случае, если задача обработ-
ки ограничивается обнаружением сигнала либо оцениванием его задержки. Однако если
требуется произвести как обнаружение, так и оценку амплитуды (мощности) сигнала на-
личие блока "Инверсно-сопряженный фильтр" необходимо.
СПИСОК ЛИТЕРАТУРЫ
1. Кутузов В. М., Рябухов И. Р., Безуглов А. В. Многосегментная авторегрессионная обработка про-
странственно-временных сигналов // Изв. вузов России. Радиоэлектроника. 1998. Вып. 2. С. 75–88.
2. Аникин А. П. Оценивание задержек сложных сигналов методом анализа собственных значений матри-
цы данных // Изв. СПбГЭТУ "ЛЭТИ". Сер. Радиоэлектроника и телекоммуникации. 2003. Вып. 1. С. 13–17.
3. Рябухов И. Р., Аникин А. П. Амплитудно-частотно-манипулированные сигналы, их свойства и харак-теристики // Изв. СПбГЭТУ "ЛЭТИ". Сер. Радиоэлектроника и телекоммуникации. 2003. Вып. 2. С. 3–6.
A. P. Anikin
MODEL-PARAMETRICAL USING OF MULTI-BAND SIGNALS
General principles and characteristics of multi-band signals processing with eigenvectors method using are described.
Amplitude-frequency-manipulated signal, time delay, statistical characteristics
Статья поступила в редакцию 27 сентября 2004 г.
ошP
0.5
0 25 50 γ
2
1
Рис. 3
обнP
0
0.5
0.3 0.6 q
2
1
Рис. 4
2ош 10P −=

10
УДК 621.391.037.372
М. А. Смирнов, А. Б. Сергиенко
МОДИФИКАЦИИ АЛГОРИТМА РАЗЛИЧЕНИЯ РЕЧИ
И ЦИФРОВЫХ СИГНАЛОВ ПЕРЕДАЧИ ДАННЫХ
На примере алгоритма, предложенного Н. Бенвенуто, рассматривается вопрос классификации сигналов в современных телефонных сетях, а также предлагается спо-соб модификации указанного алгоритма с целью повышения помехоустойчивости и уменьшения вычислительных затрат.
Речь, цифровые данные, классификация, автокорреляция, моменты высоких порядков, четырехфазная дискретизация
Для анализа загрузки телефонных сетей важной задачей является автоматизация разли-
чения сигналов передачи данных (СПД) и человеческой речи. Актуальность этой проблемы
определяется тем, что в современных телефонных сетях сигнал часто подвергается кодирова-
нию для цифровой передачи с использованием различных технологий сжатия с потерями.
Однако в телефонных сетях могут присутствовать оба типа сигналов (речь и СПД), и СПД
может существенно исказиться, если его пропустить через типичный речевой кодер.
В 1993 г. Н. Бенвенуто был предложен классификатор [1], отличающий человече-
скую речь от низкоскоростных СПД (с битовыми скоростями до 9 600 бит/с и символьны-
ми скоростями до 2 400 бод). Далее в статье будут рассмотрены результаты тестирования
этого алгоритма на записях сигналов современных высокоскоростных модемов. Кроме то-
го, предлагается несколько модификаций исходного алгоритма, позволяющих повысить
качество его работы и уменьшить вычислительные затраты.
Описание основного алгоритма. Алгоритм Бенвенуто работает с сигналами, оциф-
рованными с частотой дискретизации 8 000 Гц. Время принятия решения, согласно [1],
составляет около 32 мс.
Алгоритм основан на том факте, что спектр человеческой речи сконцентрирован
между частотами 300 и 900 Гц, а спектр СПД – около частоты 2 кГц [2], [4]. Это значение
близко к значению несущей частоты, используемой в наиболее распространенных прото-
колах модуляции, и, кроме того, соотношение 1:4 между этой частотой и частотой дискре-
тизации может быть использовано для уменьшения вычислительных затрат. Также ис-
пользуется различие свойств корреляционных функций (КФ) СПД и человеческой речи.
Согласно [2], [3], при сдвиге, равном двум отсчетам, на частоте дискретизации 8 кГц ве-
щественная часть коэффициента корреляции комплексной огибающей речевого сигнала
отрицательна, а у цифрового сигнала – положительна. Также в [1] отмечается тот факт,
что речь – это нестационарный процесс, поэтому оценка КФ с использованием временно-
го усреднения для разных фрагментов сигнала даст разный результат. Однако, несмотря
на это, в большинстве случаев знак ее вещественной части будет отрицательным. Для
уменьшения времени классификации совместно с КФ предлагается использовать один или
несколько параметров, определяющих величину вариаций амплитуды сигнала. В качестве
такого параметра Бенвенуто предлагает использовать центральный момент второго по-
рядка для амплитудной огибающей. Все вычисления производятся над низкочастотным
комплексным сигналом, квадратурно демодулированным на несущей частоте 2 кГц.
© М. А. Смирнов, А. Б. Сергиенко, 2004

11
Сигнал разбивается на сегменты с длиной 128N = или 256 отсчетов (основное ок-
но), а каждый из сегментов в свою очередь – на субокна длиной 16L = отсчетов. Для ка-
ждого из субокон вычисляются второй коэффициент автокорреляционной функции и мо-
мент второго порядка для амплитудной огибающей, затем результаты усредняются по су-
бокнам в пределах сегмента. Кроме того, вычисляется средняя мощность сегмента, что
позволяет, используя энергетический порог, исключить из сигнала паузы.
В качестве корреляционного параметра используется вещественная часть коэффициента
корреляции комплексной огибающей сигнала, определяемая следующим образом:
( ) ( ) ( )2 Re 2 0dR R Rγ γ = − , (1)
где ( )R kγ – значение КФ при сдвиге сигнала на k отсчетов, вычисленное по формуле
( ) ( ) ( )( )1
1 n
i n N
R k i k iN
∗γ
= − −
= γ + γ∑ . (2)
Здесь ( )iγ – комплексный сигнал после квадратурной демодуляции; знак " "∗
означает
комплексное сопряжение.
Нормированный момент второго порядка для ( )iγ определяется как
( )22 2 1 1m mη = − , (3)
где ( )( )1
1 nk
ki n N
m iN = − −
= γ∑ .
Так как ( )nγ – комплексный сигнал, он может быть записан как ( ) ( ) ( )n u n jv nγ = + ,
а числитель и знаменатель в (1) принимают вид:
( ) ( ) ( ) ( ) ( )( )1
1Re 2 2 2
n
i n N
R u i u i v i v iN
γ= − −
− = − + + + ∑
и
( ) ( ) ( )( )
2 2
1
10
n
i n N
R u i v iN
γ= − −
= + ∑ .
Из результатов, представленных в [1], следует, что значения корреляционных стати-
стик для ЦСПД распределены между –1 и 0, а для речи они в основном располагаются в
диапазоне от 0 до 1. Статистики, вычисленные
по нормированному моменту второго порядка,
занимают интервалы [ ]0;0.3 и [ ]0;0.5 для
ЦСПД и речи соответственно.
Распределение решающих статистик на
плоскости ( )( )22 ,dR η показано на рис. 1.
Было проведено моделирование описанного
алгоритма в пакете MATLAB, полученные резуль-
Речь
ЦСПД
0
0.25
–1
Речь
Речь
0 ( )2dR
2η
Рис. 1

12
таты показаны на рис. 2. Для тестов использовались записи сигналов современных высокоско-
ростных модемов с двумя различными скоростями передачи (протокол V.34, битовая скорость
28 800 и 33 600 бит/с, квадратурная амплитудная модуляция (КАМ) с созвездиями, содержа-
щими 960 и 1664 точки соответственно) и различные записи человеческой речи. Тестирование
проводилось при размерах окон 256N = и 128 и постоянном размере субокна 16L = .
Результаты тестов в целом совпадают с данными, представленными в [1] для низкоско-
ростных сигналов. Статистики, полученные для цифровых сигналов, имеют тенденцию груп-
пироваться в левом нижнем углу графика, в то время как статистики для человеческой речи
занимают правую часть (рис. 2).
Модифицированный алгоритм. Для увеличения помехоустойчивости в алгоритм
предлагается внести два изменения. Во-первых, вместо нормированного центрального момен-
Рис. 2
( )2dR
2η
0
0.75
–0.5 –1
0.5
KАМ-1664
Речь
KАМ-640
0.25
0
0.5
25616
NL==
( )2dR
2η
0
0.75
–0.5 –1
0.5
KАМ-1664
Речь
KАМ-640
0.25
0
0.5
12816
NL==
Рис. 3
та второго порядка предлагается использовать
статистику более высокого порядка, опреде-
ляемую следующим образом:
2
2k
k km mη = . (4)
Результаты, полученные при 4,k = 8 и
16 для тех же сигналов, что и ранее, показаны
на рис. 3. Из графиков хорошо видно, что с
увеличением k разница между значениями ста-
тистик для речи и ЦСПД заметно возрастает. ( )2dR
4η
0 –0.5–1
10
KАМ-1664
Речь
KАМ-640
1
0.5
0.1
4k =
( )2dR
8η
0 –0.5 –1
KАМ-1664
Речь
KАМ-640
410
−
210−
010
210
410
8k =
0.5 ( )2dR
16η
–0.2
KАМ-1664
Речь
KАМ-640
0.4
510
−
010
510
–0.8
16k =

13
Вторая из предлагаемых модификаций заключается в усреднении обеих статистик на
протяжении некоторого интервала усреднения уt для уменьшения влияния аномальных зна-
чений. Рис. 4 показывает влияние длины интервала на поведение используемых статистик.
Применение четырехфазной дискретизации. Для уменьшения вычислительных
затрат при нахождении комплексной огибающей можно воспользоваться тем фактом, что
частота дискретизации сигнала в рассматриваемой задаче ровно в 4 раза превышает часто-
ту несущего колебания, для которого нужно получить комплексную огибающую.
Представим входной сигнал в виде ( ) ( ) ( )coss t A t t t= ω +ϕ . Комплексная огибаю-
щая этого сигнала ( ) ( ) ( )expmS t A t j t= ϕ ɺ .
Дискретизируем сигнал с шагом T, таким, что на период колебания приходится 4 от-
счета ( )2Tω = π : ( ) ( ) ( )cos 2s kT A kT k kT= π +ϕ .
В зависимости от остатка, получаемого при делении k на 4, дискретизация дает сле-
дующие значения:
( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
cos Re , 4 ;
sin Im , 4 1;
cos Re , 4 2;
sin Im , 4 3.
m
m
m
m
A kT kT S kT k m
A kT kT S kT k ms kT
A kT kT S kT k m
A kT kT S kT k m
ϕ = = − ϕ = − = +
= − ϕ = − = +
ϕ = = +
ɺ
ɺ
ɺ
ɺ
Рис. 4
( )2dR
4η
0 –0.5–1
KАМ-1664
Речь
KАМ-640
0.5
0
0.7
1.4
2.1
2.8у
256164100 мс
NLkt
====
( )2dR
8η
0.1 –0.25 –0.6
KАМ-1664
Речь
KАМ-640
0.45
0
10
20
30
40 у
256168100 мс
NLkt
====
( )2dR
4η
–0.2 –0.8 0.4
0
1
2
KАМ-1664
Речь
KАМ-640
у
256164200 мс
NLkt
====
( )2dR
8η
0.1 –0.25 –0.6
KАМ-1664
Речь
KАМ-640
0.45
0
10
20
30
40 у
256168100 мс
NLkt
====

14
Таким образом, отсчеты исходного сигнала представляют собой отсчеты веществен-
ной и мнимой частей комплексной огибающей, взятые с чередующимися знаками и вдвое
меньшей частотой дискретизации (4 кГц). При этом фазы моментов дискретизации для
последовательностей отсчетов вещественной и мнимой частей различны – они сдвинуты
друг относительно друга на один отсчет исходной частоты (т. е. на 125 мкс).
Для получения недостающих отсчетов можно произвести интерполяцию, но для
оценки вещественной части КФ при сдвиге на два отсчета это не обязательно. Действи-
тельно, вещественную часть корреляционной функции комплексной огибающей можно
представить как
( ) ( ) ( ) ( ) ( )1
1Re 2 2 2
n
i n N
R u i u i v i v iN
γ= − +
= + + + ∑ɺ . (5)
Из (2) видно, что ( ) ( )( ) ( )( ) ( )
2 при 4 или 4 2;2
2 при 4 1 или 4 3.
u k u k k m k ms k s k
v k v k k m k m
− + = = ++ =
− + = + = +
Таким образом, ( ) ( ) ( )1
2Re 2 2
n
i n N
R s i s iN
γ= − +
≈ − + ∑ɺ .
Знак приближенного равенства и умножение на два обусловлены здесь тем, что при
каждом i в нашем распоряжении оказывается лишь одно из двух суммируемых в (5) про-
изведений отсчетов, а второе соответствует предыдущему значению i.
Аналогично получаем, что ( ) ( ) 2
1
20
n
i n N
R s iN
γ= − +
≈ ∑ .
Итак, благодаря соотношению 1:4 между несущей частотой и частотой дискретизации
коэффициент корреляции комплексной огибающей при сдвиге на два отсчета с точностью
до знака совпадает с коэффициентом корреляции исходного вещественного сигнала.
При вычислении второй статистики (3) нужно проводить интерполяцию для приведе-
ния отсчетов вещественной и мнимой частей к одним и тем же моментам времени. Однако
эксперимент показал, что использование мнимой и вещественной частей, сдвинутых по вре-
мени на один отсчет, лишь незначительно изменяет распределение данной статистики и не
требует модификации порогов, используемых дискриминатором. Это хорошо видно, если
сравнить рис. 1 и 5, на котором показано распределение решающих статистик при использо-
вании метода четырехфазной дискретиза-
ции. Пороги для ( )Re 2rγ ɺ и 2η не изме-
нялись и остались равными 0 и 0.3 соответ-
ственно. В таблице представлены параметры
распределения статистики 2η для цифрово-
го сигнала (КАМ-1664) и речи при исполь-
зовании четырехфазной дискретизации и
точного расчета комплексной огибающей с
помощью преобразования Гильберта.
( )2dR
2η
0
3.0
–0.5 –1
Речь
KАМ
1.5
0
0.5
Рис. 5

15
Полученные результаты позволяют сделать вывод, что рассматриваемый алгоритм
применим для современных высокоскоростных модемов, что, несомненно, расширяет
круг возможных его применений. Предложенная статистика (4) позволяет усилить разли-
чия между результатами тестов для речи и СПД. Усреднение статистик на интервале дли-
тельностью 100 мс и более делает упомянутые различия еще более очевидными, но увели-
чивает время анализа. При использовании модифицированного алгоритма для 4k = реко-
мендуется принимать значение порога 0.45, для 6k = – 0.2.
Рассмотренный метод получения комплексной огибающей при решении данной кон-
кретной задачи позволяет существенно снизить вычислительные затраты. За счет проре-
живания вдвое уменьшается количество операций сложения и умножения при вычислении
КФ. Однако основной выигрыш в вычислительных затратах получается за счет отказа от
гетеродинирования и последующей фильтрации квадратурных составляющих, поскольку
затраты на фильтрацию при использовании рекурсивного фильтра порядка M в 2M раз
превышают затраты на вычисление одного отсчета КФ.
СПИСОК ЛИТЕРАТУРЫ
1. Benvenuto N. A Speech/Voiceband Data Discriminator // IEEE Trans. Commun. 1993. Vol. COM-41, № 4.
P. 539–543.
2. O’Neal-Jr. J. B., Stroh R. W. Differential PCM for speech and data signals // IEEE Trans. Commun. 1972.
Vol. COM-20, № 10. P. 900–912.
3. Irvin D. R. Voice/Data detector and discriminator for use in transform speech coders // IBM Tech. Disclo-
sure Bull. 1983, June. Vol. 26. P. 363–365.
4. Benvenuto N., Daumer W. R. Classification of voiceband data signals //Proc. Int. Conf. Commun., Atlanta,
GA, April, 1990. Vol. 3. P. 1010–1013.
M. A. Smirnov, A. B. Sergienko
MODIFICATIONS OF SPEECH AND VOICEBAND DATA SIGNAL DISCRIMINATION ALGORITHM
Speech/voiceband data classification algorithm proposed by N. Benvenuto for modern telephone systems is presented. In addition, several modifications of the original algorithm to improve of its quality and decrease computational complexity are suggested.
Speech, voiceband data, discrimination, autocorrelation, higher-order moments, 4-phase sampling
Статья поступила в редакцию 4 октября 2004 г.
Четырехфазная дискретизация Расчет комплексной огибающей с использованием преобразования Гильберта
Статистический параметр величины
2ηɶ КАМ Речь КАМ Речь
Минимум 0.1426 0.2006 0.07155 0.02847
Максимум 0.2999 4.14 0.3271 3.584
Среднее 0.2389 0.8994 0.2102 0.4064
Дисперсия 0.03144 0.6294 0.05042 0.3341

16
УДК 537.868:535
В. А. Степанов, О. В. Щербакова
ПАДЕНИЕ ПЛОСКОЙ ВОЛНЫ НА ГРАНИЦУ РАЗДЕЛА
СРЕД С ПОЛОЖИТЕЛЬНЫМИ И ОТРИЦАТЕЛЬНЫМИ
МАТЕРИАЛЬНЫМИ ПАРАМЕТРАМИ
Получены аналитические выражения законов Снеллиуса и формул Френеля для случая, когда одна из двух сред имеет отрицательные материальные параметры. Рассмотрена поверхностная волна в среде с отрицательными параметрами, возникающая при полном внутреннем отражении, которая распространяется навстречу источнику. Обсуждается возможность возбуждения поверхностной волны, затухающей в обе стороны от границы раздела, волной, падающей под углом, большим угла полного внутреннего отражения.
Поверхностные волны, среды с отрицательными материальными параметрами, левосторонние материалы, полное внутреннее отражение
Реализация искусственных сред с отрицательными материальными параметрами [1]
диктует необходимость получения аналитических выражений законов Снеллиуса и формул
Френеля и рассмотрения новых интересных свойств, которые вытекают из этих законов для
таких искусственных сред.
Пусть имеется плоская граница раздела двух полубесконечных сред (см. рисунок).
Среда 1 обладает положительными материальными параметрами: диэлектрической ( )1ε и
магнитной ( )1µ проницаемостями, а среда 2 имеет отрицательные материальные парамет-
ры ( 2− ε и )2− µ . В среде 2 волновой вектор направлен противоположно вектору Пой-
тинга. Составляющие волновых векторов вдоль оси x в обеих средах равны. Для просто-
ты будем считать, что обе среды не имеют потерь. Плоская волна падает на границу раз-
дела из первой среды. Плоскостью падения будем считать плоскость, содержащую нор-
маль к границе раздела и вектор Пойтинга падающей волны S . Углы падения ϕ , отраже-
ния оϕ и преломления пϕ являются углами между нормалью к границе раздела и векто-
рами Пойтинга падающей волны S , отраженной волны оS и преломленной волны пS со-
ответственно; о п, , l l l – координаты вдоль направлений распространения падающей, от-
раженной и преломленной волн соответственно.
Рассмотрим лишь два случая поляризации векто-
ра электрического поля E , так как суперпозици-
ей результатов можно получить любую ориента-
цию этого вектора и, соответственно, вектора
магнитного поля H .
Параллельная поляризация. При парал-
лельной поляризации вектор E расположен в
плоскости падения xz (см. рисунок). Для вектора
H падающей волны справедливо соотношение
( )1expy yC jk l H= − =H e e , (1)
© В. А. Степанов, О. В. Щербакова, 2004
оH
оS
x
ϕ1
2
l
оE
S
E
H
оϕ
оl
пH
пEпS
пl
пϕz

17
где C – комплексная амплитуда падающей волны; ye – орт, направленный вдоль оси y ;
1 1 1k = ω ε µ – волновое число в первой среде; ( )1expH C jk l= − – проекция вектора H на
собственный орт ( )ye .
Так как в результате падения электромагнитной волны на границу сред векторы маг-
нитного поля отраженной и преломленной волн сохраняют направление вдоль оси у , от-
личаясь только амплитудами и фазами, можно записать:
( )о о 1 оexp ;H CM jk l= − (2)
( )п п 2 пexpH CM j k l = − − , (3)
где о оM H H= и п пM H H= – в общем случае комплексные коэффициенты отражения
и преломления составляющих поля H для данной поляризации; 2 2k k= − =
( )( )2 2 = ω − − ε − µ – волновое число во второй среде [2]. Знак минус перед квадрат-
ным корнем означает, что волновой вектор и вектор Пойнтинга во второй среде противо-
положны друг другу, что следует из уравнений Максвелла. Коэффициент преломления
( ) ( )2 2 2 2n n= − = − − ε − µ во второй среде, как будет показано далее, также необходи-
мо брать со знаком минус [2].
Переходя из системы координат о п, , l l l в декартовую систему, (1)–(3) можно пере-
писать так:
( )( )
( ) ( ){ }
1
о о 1 о о
п п 2 п п
exp cos sin ;
exp cos sin ;
exp cos sin .
H C jk z x
H CM jk z x
H CM j k z x
= − ϕ+ ϕ
= − − ϕ + ϕ
= − − ϕ − ϕ
Для касательных составляющих векторов магнитных полей, направленных вдоль оси
y, граничные условия при 0z = записываются как о пH H H+ = , т. е.
( ) ( ) ( )( )1 о 1 о п 2 пexp sin exp sin exp sinC jk x CM jk x СM j k x − ϕ + − ϕ = − − − ϕ .
Это равенство возможно при соблюдении условий:
1) ( )( )1 1 о 2 пsin sin sink x k x k xϕ = ϕ = − − ϕ ;
2) о п1 M M+ = , (4)
откуда следуют аналитические записи первого и второго законов Снеллиуса: оϕ = ϕ и
( )( )п 1 2 1 2 1 1 2 2sin sin k k n n− ϕ ϕ = − = − = ε µ − − ε − µ .
Для нахождения неизвестных коэффициентов оM и пM в (4) необходимо вывести из
граничных условий для тангенциальных составляющих вектора E дополнительное урав-
нение. Найдем составляющие вектора E из уравнений Максвелла:
( ) ( )1;x zE j H z
−= ωε ∂ ∂ (5)

18
( ) ( )z xE j H x= − ωε ∂ ∂ (6)
Запишем тангенциальные составляющие xE падающей, отраженной и преломлен-
ной волн:
( ) ( )1 1 1cos exp cos sinxE C k jk z x= ωε ϕ − ϕ+ ϕ ;
( ) ( ) о о 1 1 1cos exp cos sinxE CM k jk z x= − ωε ϕ − − ϕ+ ϕ ;
( ) ( ){ } ( )( ) п п 2 2 п 2 п пcos exp cos sinxE CM k j k z x = − ω − ε ϕ − − ϕ − ϕ .
Из граничных условий для касательных составляющих вектора E следует дополни-
тельное уравнение для неизвестных коэффициентов отражения и преломления:
( ) ( ){ }( )о 2 1 2 1 п п1 cos cosM k k M − = − ε − ε ϕ ϕ . (7)
Решая систему уравнений (4) и (7), получим формулы, аналогичные формулам Френеля:
( ) ( ) ( )о
2 2 21 2 1 2 2 1 1
21
sin 1 sin 1
M = −ε ε µ µ ε −µ ε ϕ − ϕ +
(8)
( ) ( ) ( )п
2 2 21 2 1 2 2 1 1
2
sin 1 sin 1
M =ε ε µ µ ε −µ ε ϕ − ϕ +
(9)
Эти формулы можно переписать по аналогии с формулами для длинных линий в бо-
лее удобном виде:
( ) ( )о э2 э1 э2 э1M Z Z Z Z= − − + ; (10)
( )п э1 э1 э22M Z Z Z= +
где э1 1 1 cosZ = µ ε ϕ и э2 2 2 пcosZ = µ ε ϕ – эквивалентные волновые сопротивления
для падающей и преломленной волн соответственно.
Угол падения, при котором о 0M = , называется углом Брюстера. Из (10) видно, что,
по аналогии с длинными линиями, для согласования двух сред, т. е. для отсутствия отра-
жения, необходимо равенство эквивалентных волновых сопротивлений:
2 2 п 1 1cos cosµ ε ϕ = µ ε ϕ .
Отсюда угол Брюстера Брϕ можно определить как
( ) ( )Бр п 2 2 1 1 п 2 1cos cos cos z zϕ = ϕ µ ε µ ε = ϕ ,
либо
( ) ( )2 2Бр 2 2 1 1 2 1 2 1sin ϕ = ε ε µ − ε µ µ ε − ε ,
где 1 2 и z z – волновые сопротивления первой и второй сред, соответственно.
Перпендикулярная поляризация. При перпендикулярной поляризации вектор H
расположен в плоскости падения xz . Пользуясь принципом перестановочной двойствен-
ности, можно получить формулы для коэффициентов отражения и преломления касатель-
ной составляющей вектора E в случае перпендикулярной поляризации:

19
( ) ( ) ( )о
2 2 21 2 1 2 2 1 1
21
sin 1 sin 1
M = −µ µ ε µ ε − ε µ ϕ − ϕ +
; (11)
( ) ( ) ( )п
2 2 21 2 1 2 2 1 1
2
sin 1 sin 1
M =µ µ ε ε µ − ε µ ϕ − ϕ +
.
Используя определения коэффициентов отражения и преломления можно легко най-
ти любые другие составляющие полей при любой поляризации. Приравнивая (11) к нулю,
вычислим угол Брюстера для перпендикулярной поляризации:
( ) ( )2 2Бр 2 2 1 1 2 1 2 1sin ϕ = µ ε µ − ε µ ε µ −µ .
Полное внутреннее отражение (ПВО). Из второго закона Снеллиуса видно, что,
если первая среда относительно второй оптически более плотная, т. е.
1 1 2 2µ ε > µ ε , (12)
то можно подобрать такой угол падения ϕ , при котором пsin 1ϕ = и п 2ϕ = π .
Этот угол называется углом полного внутреннего отражения ПВОϕ .
( )ПВО 2 2 1 1sinϕ = µ ε µ ε .
Если ПВОϕ > ϕ и выполняется (12), то
пsin 1ϕ > . (13)
При действительных значениях пϕ удовлетворить (12) невозможно, поэтому пϕ
представляют в виде комплексного угла [3]: п п1 п2jϕ = ϕ + ϕ . Тогда (13) будет удовлетво-
рено, так как при п1 2ϕ = π п п1 п2 п1 п2 п2sin sin ch cos sh chjϕ = ϕ ϕ + ϕ ϕ = ϕ .
Найдем поля для параллельной поляризации в случае ПВОϕ > ϕ .
Учитывая (13):
2п пcos sin 1jϕ = ϕ − . (14)
Перепишем выражение для пH в соответствии с (14):
( ) ( )2п п 2 п 2 пexp sin 1 exp sinH CM k z j k x
= − ϕ − − ϕ . (15)
Учитывая (5), (11) и (15), выражения для составляющих вектора пE будут иметь вид:
( )( ) ( ) ( )2 2 2
п п п 2 п 2 п2
sin 1exp sin 1 exp sinx
kE CM k z j k x
j
− = − ϕ − − ϕ − − ϕ ω − ε;
( )( ) ( ) ( )2 2
п п п 2 п 2 п2
sin exp sin 1 exp sinz
kE CM k z j k x
− = ϕ − ϕ − − ϕ ω − ε.
Вещественные значения векторов Пойтинга во второй среде вдоль осей x и z , ус-
редненные по времени, определяются следующим образом:
( ) ( ){ } ( )22 22 п 2 п 2 2 пsin 2 exp 2 sin 1x xC M k k z
= − − ϕ ω − ε − ϕ − S e (16)

20
( )
( ) ( )2
2 2 п2 22 п 2 п
2
sin 1Re exp 2 sin 1 0
2z z
kC M k z
j
− ϕ − = − − ϕ − = ω − ε S e , (17)
где и x ze e – орты, направленные вдоль осей и x y соответственно.
В рассматриваемом случае модули коэффициентов преломления и отражения:
п 2M = ; (18)
о 1M = . (19)
Из (16) видно, что во второй среде поток мощности направлен вдоль отрицательно-
го направления оси x , а волновой вектор – вдоль положительного направления этой оси.
Из (17) следует, что вектор Пойтинга вдоль оси z имеет только мнимую составляющую.
Таким образом, вдоль оси z электромагнитная волна не распространяется, но происходит
пульсация мощности в этом направлении. Среднее за период колебания значение вектора
Пойтинга вдоль оси z равно нулю.
Итак, в случае полного отражения на границе раздела сред, одна из которых имеет по-
ложительные, а другая – отрицательные материальные параметры, существуют три значе-
ния вектора Пойтинга, отличные от нуля. Они соответствуют падающей и отраженной вол-
нам в первой среде и поверхностной волне во второй среде. Последняя, в отличие от по-
верхностной волны на границе двух сред с положительными материальными параметрами
при полном внутреннем отражении [3], распространяется (ее средний вектор Пойтинга пS )
по направлению не от источника, а к источнику, в то время как волновой вектор этой волны
направлен противоположно вектору Пойтинга. Стоит отметить, что поверхностная волна во
второй среде, как в первом, так и во втором случаях, является частью единого волнового
процесса, существующего на границе раздела двух сред, т. е. существует только при нали-
чии падающей волны, распространяющейся под углом, бóльшим угла полного внутреннего
отражения. Однако есть основания полагать [4], что в рассмотренном ранее случае, в отли-
чие от случая с положительными материальными параметрами, поверхностная волна такого
рода может возбудить новую ТМ- или ТЕ-поверхностную волну, экспоненциально зату-
хающую в обе стороны от границы раздела, которая продолжит свое существование и после
исчезновения падающей волны. Это заявление основано на том факте, что в рассмотренном
случае удовлетворяются все условия существования ТМ- или ТЕ-поверхностной волны,
экспоненциально затухающей в обе стороны от границы раздела [4].
Рассмотрим случай ПВОϕ = ϕ . Тогда выражение для пH будет следующим:
( )п п 2expH CM j k x = − . (20)
Используя (20) и (6), получим выражение для среднего вектора Пойтинга вдоль оси x :
( )* 2 * п п п 2 20.5Re 2x z xC k = = − ω ε S E H e M , (21)
где "*"
– знак комплексного сопряжения.
Подставляя в (8) и (9) условие ПВОϕ = ϕ , получим значения для коэффициентов
преломления и отражения:

21
п 2M = ; (22)
о 1M = . (23)
Из (21) видно, что в случае ПВОϕ = ϕ во второй среде вдоль границы раздела в отрица-
тельном направлении оси x распространяется обычная плоская волна. Из (19) и (23) ясно, что
происходит полное отражение, а (18) и (22) показывают, что поля во второй среде удваивают-
ся, как того требуют граничные условия. Выражения (16) и (21) показывают, что в обоих слу-
чаях существует прошедшая мощность, несмотря на то что баланс мощностей свидетельствует
об обратном. Дело в том, что в балансе мощностей под прошедшей мощностью подразумева-
ют ту мощность, которая проходит через границу раздела, т. е. создает вещественный поток
мощности через границу раздела, удаляющийся от границы. В рассматриваемых же случаях
вещественный поток мощности через границу раздела отсутствует, но существует поток мощ-
ности, который движется параллельно границе раздела во второй среде. В случае ПВОϕ = ϕ
это обычная плоская волна, а при ПВОϕ > ϕ плоская волна переходит в поверхностную.
Проведенный анализ показал, что циркуляция мгновенных потоков мощности для слу-
чая полного внутреннего отражения, когда ПВОϕ > ϕ , аналогична циркуляции мгновенных
потоков мощности для поверхностных волн [4], что также указывает на возможность возбу-
ждения последних косым падением под углом, бóльшим угла полного внутреннего отраже-
ния. Это свойство, несомненно, может быть использовано при создании новых узлов или
устройств, использующих новые среды с отрицательными материальными параметрами.
СПИСОК ЛИТЕРАТУРЫ
1. Shelby R., Smith D., Schultz S. Experimental Verification of a Negative Index of Refraction // Science.
2001. Vol. 292. P. 77–79.
2. Ziolkowski R. W. Wave propagation in media having negative permittivity and permeability // Phys. Rev. E. 2001. Vol. 64. P. 056625-1–056625-15.
3. Никольский В. В. Электродинамика и распространение радиоволн. М.: Наука, 1978. С. 161–164.
4. Степанов В. А., Щербакова О. В. Поверхностные волны на границе раздела двух сред // Изв. вузов
России. Радиоэлектроника. 2004. Вып. 3. С. 10–18.
V. A. Stepanov, O. V. Scherbakova
INCIDENT OF PLANE WAVE ON THE INTERFACE OF MEDIA WITH POSITIVE AND NEGATIVE MATERIAL PARAMETERS
Snell's law and Frenel's formulas are verified for case, when one of two media have nega-tive material parameters. Surface wave in medium with negative material parameters, arising in case of total internal reflection and propagation towards source, is considered. Excitation opportunity of surface wave, decaying in both sides away from interface, by angle of incidence larger them angle of total internal reflection.
Surface waves, medium with negative material parameters, total internal reflection.
Статья поступила в редакцию 5 октября 2004 г.

22
УДК 621.3.049.77:621.372.54
П. В. Капитанова, А. В. Симин, Д. В. Холодняк, И. Б. Вендик
ПАССИВНЫЕ КОМПОНЕНТЫ ИНТЕГРАЛЬНЫХ СХЕМ
СВЧ, ВЫПОЛНЕННЫЕ ПО МНОГОСЛОЙНОЙ
"СЭНДВИЧ"-ТЕХНОЛОГИИ
Исследуются возможности многослойной "сэндвич"-технологии для реализации интегральных схем СВЧ. Представлены варианты реализации пассивных СВЧ-компо-нентов и полосно-пропускающего фильтра на их основе. Приведены расчетные харак-теристики и результаты экспериментального исследования тестовых структур.
Многослойные интегральные схемы СВЧ, фильтры
Пассивные СВЧ-устройства традиционно реализуются в виде гибридных интегральных
схем (ИС) на основе планарных линий передачи: полосковых, микрополосковых (МПЛ), ко-
планарных, которые выполняются на диэлектрических подложках методами тонкопленочной
технологии. К недостаткам таких устройств можно отнести их сравнительно большие габари-
ты (особенно в нижней части СВЧ-диапазона) и паразитные резонансы высших гармоник.
В последнее время наблюдается повышенный интерес к применению многослойных ИС
СВЧ на основе керамики с низкой температурой обжига (КНТО) (Low Temperature Cofired Ce-
ramics – LTCC) [1]–[5], обусловленный способностью обеспечить высокую степень интегра-
ции схемы за счет размещения элементов в нескольких слоях, а также технологичностью изго-
товления и низкой себестоимостью благодаря использованию толстопленочной технологии.
Технологический процесс изготовления КНТО-модулей состоит в нанесении на тон-
кие диэлектрические листы рисунка топологии проводящих слоев, после чего листы соби-
рают в "стек" и производят обжиг [6]. Готовые КНТО-модули в дальнейшем монтируются
на керамическую подложку с другими элементами СВЧ-тракта.
Значительный интерес может представлять также технология, сочетающая в себе
достоинства как гибридных, так и многослойных ИС СВЧ.
В низкочастотном диапазоне (до 100 МГц) в течение длительного времени успешно
применяются многослойные керамические платы с многоуровневой коммутацией, выпол-
няемые на основе толстопленочной технологии [7]. При этом, в отличие от КНТО-техно-
логии, используется "толстая" диэлектрическая подложка, являющаяся основанием, на ко-
торое методом трафаретной печати поочередно наносятся проводящие и диэлектрические
слои с последующим обжигом каждого нанесенного слоя. Эта технология позволяет фор-
мировать с каждой стороны подложки многослойную "сэндвич"-образную структуру из не-
скольких проводящих и диэлектрических слоев в тех местах подложки, где это необходимо.
Применение многослойной "сэндвич"-технологии для создания СВЧ-устройств
впервые было описано в [8].
В настоящей статье приведены результаты моделирования и экспериментального
исследования нескольких вариантов реализации распределенных и сосредоточенных пас-
сивных компонентов ИС СВЧ. Представлены топология и расчетные характеристики по-
© П. В. Капитанова, А. В. Симин, Д. В. Холодняк, И. Б. Вендик, 2004

23
лосно-пропускающего СВЧ-фильтра на квазисосредоточенных элементах для стандартов
беспроводной связи Bluetooth и IEEE 802.11.
Реализация пассивных СВЧ-компонентов на основе многослойной "сэндвич"-
технологии. С применением многослойной "сэндвич"-технологии были изготовлены и
экспериментально исследованы следующие тестовые структуры: отрезки МПЛ с волно-
вым сопротивлением 50 Ом, полуволновые резонаторы с емкостными связями, а также
квазисосредоточенные емкостные и индуктивные элементы.
В качестве основания для "сэндвич"-структуры использовалась подложка из полико-
ра толщиной 0.5 мм с относительной диэлектрической проницаемостью 9.8rε = . Для на-
несения проводящих слоев толщиной 15 мкм применялась паста на основе серебра
( )dc 0.02 ОмR ≈ . Дополнительные диэлектрические слои ( )10.2rε = имели толщину 45 мкм.
В ходе экспериментального исследования измерялись коэффициенты передачи и от-
ражения тестовых структур в диапазоне частот 2…4 ГГц. Экспериментальные данные
сравнивались с результатами численного электродинамического моделирования. На
рис. 1, a показана МПЛ на поликоровой подложке с дополнительным диэлектрическим
слоем сверху. Ширина линии с волновым сопротивлением 50 Ом составила 450 мкм.
Верхний слой диэлектрика частично отсутствовал на краях, открывая доступ ко входам
линии, ширина которой на этих участках была выбрана с учетом компенсации изменения
волнового сопротивления. Расстояние между входами равнялось 48 мм.
Измеренные коэффициенты отражения ( )11S и передачи ( )12S многослойной струк-
туры, показанной на рис. 1, а приведены на рис. 1, б для пяти образцов, изготовленных в
разных производственных циклах. Наблюдается хорошая повторяемость характеристик.
Все исследованные структуры продемонстрировали согласование по входу не хуже
15 дБ− . Среднее значение вносимых потерь на частоте 3 ГГц составило 1 дБ, что соответ-
ствует погонному затуханию 0.02 дБ/мм.
На основе исследованной МПЛ был разработан резонатор на частоту 3 ГГц с емко-
стными связями, которые реализованы за счет перекрытия концов полуволнового отрезка
МПЛ 1 линиями возбуждения 2, размещенными в другом слое (рис. 2, а). Эксперимен-
тальные характеристики резонатора приведены на рис. 2, б. Там же штриховыми линиями
показаны результаты численного электродинамического моделирования многослойной
структуры. Наблюдается хорошее совпадение между расчетными и экспериментальными
данными и малый разброс параметров для серии протестированных образцов.
, дБS
– 24
– 12
0
2.0 2.5 3.0 3.5 , ГГцf
12S
11S
а б
Рис. 1

24
Многослойная "сэндвич"-технология предоставляет возможности для реализации СВЧ-
устройств на сосредоточенных и квазисосредоточенных элементах, что позволяет умень-
шить габариты устройств и решить проблему паразитных резонансов кратных гармоник.
На рис. 3, а изображена структура плоскопараллельного конденсатора емкостью
40 пФ, выполненного по многослойной "сэндвич"-технологии. Один из электродов распо-
лагается на поверхности поликоровой подложки, а другой отделен от него слоем диэлек-
трика толщиной 45 мкм. Минимальная толщина диэлектрического слоя позволяет сделать
компоненты максимально компактными.
Расчетные характеристики емкостного элемента, полученные при помощи электро-
динамического моделирования, показаны на рис. 3, б в сравнении с результатами экспе-
риментального исследования нескольких образцов.
Спиральная индуктивность с номинальным значением 2 нГн показана на рис. 4, а.
Ширина проводников составляет 450 мкм, а расстояние между ними – 550 мкм. Подводя-
щие линии выполнены поверх тонкого (45 мкм) слоя диэлектрика и соединены с вывода-
, дБS
– 24
– 12
0
2.0 2.5 3.0 3.5 , ГГцf
11S 12S
а б Рис. 2
2
1
, дБS
– 6
– 2
0
2.0 2.5 3.0 3.5 , ГГцf
11S
12S
а б
Рис. 3
, дБS
– 12
– 6
0
2.0 2.5 3.0 3.5 , ГГцf
12S
11S
а б Рис. 4

25
ми индуктивности через переходные отверстия. Результаты моделирования и эксперимен-
тального исследования такой структуры приведены на рис. 4, б.
Реализация многослойной интегральной схемы СВЧ-фильтра для беспроводной связи. С применением "сэндвич"-технологии был разработан малогабаритный СВЧ-
фильтр для стандартов беспроводной связи Bluetooth и IEEE 802.11b [9]. Эквивалентная
схема трехзвенного полосно-пропускающего фильтра с Чебышевской характеристикой,
выполненного на квазисосредоточенных параллельных контурах с емкостными связями,
приведена на рис. 5. Фильтр был реализо-
ван в виде многослойной ИС, состоящей из
поликоровой подложки, двух тонких ди-
электрических слоев и трех слоев металли-
зации. Размеры фильтра составляют
6.5 6.0 0.65 мм× × (рис. 6, а).
Емкости параллельных контуров ( 3C , 4C ) выполнены в виде плоскопараллельных
конденсаторов, образованных электродом, находящимся между диэлектрическими слоя-
ми, и металлическим экраном. Емкостные элементы связи ( 1C , 2C ) реализованы за счет
частичного перекрытия электродов конденсаторов, расположенных в разных слоях. Ин-
дуктивные элементы ( 1L , 2L ) выполнены в виде узких отрезков линий передачи (250 мкм)
и заземлены с помощью переходных отверстий.
Результаты электродинамического моделирования многослойной структуры фильтра
в отсутствие потерь (сплошные линии) и с учетом потерь (штриховые линии) представле-
ны на рис. 6, б. Потери в полосе пропускания фильтра не превышают 4 дБ− при исполь-
зовании слоев металлизации толщиной 15 мкм с dc 0.002 ОмR ≈ и диэлектрических слоев
с tg 0.002δ = . Коэффициент отражения по входу фильтра не хуже 17 дБ− .
Экспериментальное исследование тестовых структур пассивных компонентов СВЧ
ИС, реализованных на основе многослойной "сэндвич"-технологии, выявило малый раз-
брос параметров структур с одинаковой геометрией, изготовленных в разных производст-
венных циклах, и хорошее совпадение характеристик с результатами электродинамиче-
ского моделирования.
Таким образом, продемонстрировано, что данная технология может успешно приме-
няться для изготовления ИС СВЧ-диапазона.
1L
3C
1L
3C
2L
4C
1C 1C2C 2C
Рис. 5
, дБS
– 40
– 20
0
2.0 2.25 2.5 2.75 , ГГцf
12S
11S
а б
Рис. 6

26
В качестве примера реализации пассивных СВЧ-устройств был разработан миниатюрный
полосно-пропускающий фильтр 3-го порядка. По результатам электродинамического модели-
рования фильтра можно сделать вывод о хороших перспективах применения СВЧ-устройств,
выполненных по многослойной "сэндвич"-технологии, в системах связи и телекоммуникаций.
СПИСОК ЛИТЕРАТУРЫ
1. Sheen J. LTCC-MLS duplexer for DCS-1800 // IEEE Trans. on Microwave Theory Tech. 1999.
Vol. MTT-47, № 9. P. 1883–1889.
2. Design of resonators and filters based on LTCC lumped components / E. Loskot, V. Kondratiev, I. Vendik,
et al. // Proc. of 30th European Microwave Conf., Paris, France, October 2000, Vol. 3. Paris, France: Miller–
Freeman, 2000. P. 208–211.
3. Highly-Integrated LTCC Frontend-Modules for Bluetooth and Wireless-LAN Applications / P. Heide,
A. Chernyakov, K. Markov et al. // Proc. of European Wireless Technologies Conf. Munich, 7–9 October, 2003.
London: Horizon House, 2003. P. 359–362.
4. Лапшин A. В., Симин A. В., Вендик И. Б. Миниатюрные СВЧ-фильтры в виде многослойной интеграль-
ной схемы // Известия СПбГЭТУ "ЛЭТИ". Сер. Радиоэлектроника и телекоммуникации. 2002. Вып. 2. С.31–33.
5. Design of quasi-lumped-element LTCC filters and duplexers for wireless communications / A. Simine, V. Piatnitsa, A. Lapshin et al. // Proc. of 33d European Microwave Conf., Munich, 7–9 October 2003. Vol. 3. Lon-
don: Horizon House, 2003. P. 911–914.
6. Cahn R. W., Haasen P., Kramer E. J. Materials science and technology. A comprehensive treatment // Proc-
essing of ceramics. 1996, Vol. 17A. New York: VCH Publishers Inc., 478 p.
7. ОСТII.027.904-83. Платы многослойные керамические. Общие технические условия. Ввод в действие
1986. М.: Изд-во стандартов, 1986.
8. Investigations of microwave passive components based on multilayer "sandwich" technology / P. Kapitano-
va, A. Simine, D. Kholodnyak // Proc. of 11th Int. Student Seminar on Microwave Application of Novel Physical
Phenomena, SPb., 7–9 June, 2004. SPb.: Publishing house SPb.GETU "LETI", 2004. P. 48–50.
9. A novel design of multilayer front-end devices for bluetooth and WLAN applications / A. Simine, I. Fich-
shuk, J. Shakulo, et al. // Proc. of 11th Int. Student Seminar on Microwave Application of Novel Physical Phenom-ena, SPb., 7–9 June, 2004. SPb.: Publishing house SPb.GETU "LETI", 2004. P. 51–54.
P. V. Kapitanova, A. V. Simine, D. V. Kholodnyak, I. B. Vendik
PASSIVE COMPONENTS OF MICROWAVE INTEGRATED CIRCUITS BASED ON THE MULTILAYER "SANDWICH" TECHNOLOGY
Possibilities of using multilayer "sandwich" technology for microwave applications are investigated. Designs of various passive microwave components and a bandpass filter are dis-cussed. Simulated characteristics and experimental data are presented.
Multilayer microwave integrated circuits, filters
Статья поступила в редакцию 1 октября 2004 г.
УДК 621.397:539.21
Д. М. Джамалудинов
ОБНАРУЖИТЕЛЬНАЯ СПОСОБНОСТЬ МАТРИЧНЫХ ПЗС
В БЛИЖНЕМ ИНФРАКРАСНОМ ДИАПАЗОНЕ
Получены количественные оценки обнаружительной способности (пороговой тем-пературы и пороговой мощности) матричных ПЗС с красной границей 1.1 мкм в ближ-нем инфракрасном диапазоне в отсутствие внешнего фона.
Матричные ПЗС, ближний инфракрасный диапазон, оценка обнаружительной способности
Телекамеры на массово выпускаемых кремниевых матричных приборах с зарядовой
связью (ПЗС) широко используются в системах наблюдения не только в видимом, но и в © Д. М. Джамалудинов, 2004

27
ближнем инфракрасном (ИК) диапазоне, так как имеют красную границу 1.1 мкм, превы-
шающую красную границу зрения. Освоение ближнего ИК-диапазона с помощью видико-
нов известно [1]. Однако в связи с перспективностью твердотельной технологии далее
рассматриваются только матричные фотоприемники. Применение ПЗС тем более обосно-
вано, что видиконы обладают нестабильностью растра и инерционностью.
Так как в сфере ИК-техники обнаружительная способность оценивалась только в
средней (2…5 мкм) и дальней (8…14 мкм) областях инфракрасного диапазона, была по-
ставлена задача оценить чувствительность матричных ПЗС в ближнем инфракрасном диа-
пазоне. Вне видимого диапазона использование единицы освещенности люкс∗ невозмож-
но и практические приложения нуждаются в корректной оценке обнаружительной спо-
собности ПЗС. Согласно развитым методам оценки обнаружительной способности ИК-фо-
топриемников принято различать три меры чувствительности: обнаружительную способ-
ность (detectivity) D∗
[2], пороговую разность температур [3], [4] и пороговую мощность,
воспринимаемую элементом разложения [2], [4].
В статье рассматривается первое приближение к решению задачи оценки обнаружи-
тельной способности, когда обнаружение полезного сигнала осуществляется в отсутствие
внешнего фона, только на фоне темнового тока фотоприемной матрицы. В качестве полезно-
го сигнала рассматривается ИК-излучение абсолютно черного тела (АЧТ), нагретого до не-
которой температуры Т, плотность мощности которого описывается формулой Планка [3].
Задача оценки обнаружительной способности соответствует поиску такой минимальной
мощности излучения или минимальной температуры, при которой отношение сигнал/шум
ψ превышает пороговое значение порψ (в расчетах было принято типовое значение
пор 5ψ = [5]). При оценке было принято, что для типовых матриц ПЗС с емкостью потенци-
альной ямы элемента порядка 510
электронов значение темнового заряда элемента при ком-
натной температуре составляет около 1% от сигнала насыщения, т. е. 310 электронов [4]. Известно, что при наличии фона чувствительность телевизионной системы опреде-
ляется флуктуациями потока фотонов в сигнале и в фоне. Из-за независимости этих флук-
туаций отношение сигнал/шум определится средними числами накопленных сигнальных
фотонов сN и фоновых фотонов фN [4]:
( )2 2 2с с ф ш порN N N kψ = + ≥ ψ , (1)
где шk – коэффициент шума ПЗС (для вещательной телекамеры ш 3)k = .
В качестве фонового тока примем сигнал ф 1000N = электронов, а количество сигналь-
ных электронов на выходе фотоприемника, накопленных за кадр, с учетом зависящего от дли-
ны волны излучения λ квантового выхода ( )η λ , времени накопления нT и площади элемента
разложения 2∆ матрицы ПЗС найдем по формуле [3], [6] ( ) ( )гр
2с н
0
,N T N T d
λ
= ∆ λ η λ λ∫
∗С помощью которой обычно задается чувствительность матричных ПЗС.

28
( гр 1.1 мкмλ = – красная граница чувствительности кремниевого матричного фотоприемни-
ка; ( ),N Tλ – плотность излучения АЧТ). По результатам расчетов построены кривые зави-
симости отношения сигнал/шум на выходе матричных фотоприемников от температуры АЧТ (рис. 1) для разного времени накопления излучения, а также кривая чувствительности
глаза (штриховая линия, граничная длина волны гр 0.78 мкмλ ≈ ). По кривым видно, что
для излучения АЧТ при температуре 700 KT = на выходе вещательной телекамеры с вре-
менем накопления, равным 20 мс, пороговое отношение сигнал/шум порψ , вычисляемое по
формуле (1), достигает значения пор 5ψ = . Для иллюстрации работы телекамеры в этих ус-
ловиях на рис. 2 приведено изображение жала паяльника, нагретого до 700 К. С увеличением времени накопления чувствительность ПЗС повышается. Так, при
н 1 сT = обнаружение излучения нагретого тела происходит при температуре 600 KT =
(разность температур объекта и фона 300 K). Эта температура превосходит пороговое зна-
чение для обнаружения глазом на 230 K. Дальнейшее увеличение времени накопления тре-
бует охлаждения фотоприемника. Незначительное увеличение чувствительности ПЗС при
повышении нT до 10 с объясняется тем, что, как известно [7], при снижении температуры
охлаждения матричных ПЗС чувствительность в ближней инфракрасной области падает.
Определим в соответствии с [2] обнаружительную способность приемника D∗ на
длине волны λ :
* 1 2эл нD P T−= ∆ , (2)
где ( )эл н фP c T N= λ ηℏ – требуемая мощность излучения, приходящаяся на элемент
разложения (ℏ – постоянная Планка; c – скорость света).
На рис. 3 приведена зависимость ( )элP λ для матричного фотоприемника вещательной
телекамеры с н 20 мсT = . Как следует из нее, с увеличением длины волны возрастает тре-
буемая элP . Так, при 1.08 мкмλ ≈ 13эл 1.5 10 Вт элP
−= ⋅ . С учетом порогового значения
отношения сигнал/шум и коэффициента шума получаем пороговую мощность излучения на
элемент: 12пор эл пор ш 2.2 10 Вт элP P k
−= Ψ = ⋅ , что примерно в 100 раз больше, чем порого-
вая мощность на длине волны 0.6 мкм, где ПЗС имеет максимальный квантовый выход. Из-
лучение с длиной волны, большей гр 1.1 мкмλ ≈ , не обнаруживается. Для длины волны
Рис. 2
Рис. 1
ψ
, KT0
450 550 650 750
2
4
5 с
н 10 сT =
1 с 20 мс
пор 5ψ =

29
0.9 мкм (типичное значение максимума мощности излучения светодиодных излучателей, ис-
пользуемых в системах наблюдения совместно с матричными ПЗС) 14пор 6 10 Вт элP
−= ⋅ .
Зная значение элP , по (2) найдем обнаружительную способность элемента разложе-
ния матричных ПЗС D∗ (рис. 4). Из зависимости следует, что при продвижении в длинно-
волновую область обнаружительная способность фотоприемника падает. На гр 1.1 мкмλ ≈
11 0.5 11.6 10 см Гц ВтD∗ −= ⋅ ⋅ ⋅ .
Эксперимент, произведенный с помощью вещательной видеокамеры, дал результаты,
практически совпадающие с расчетными. Таким образом, при расчете обнаружительной
способности телекамер на матричных ПЗС с красной границей гр 1.1 мкмλ ≈ в ближнем
инфракрасном диапазоне можно пользоваться оценками, представленными на рис. 1, 3, 4.
Так как в настоящее время фотоприемники, используемые для средневолнового ин-
фракрасного диапазона, весьма дороги, то применение массово выпускаемых матричных
ПЗС с красной границей около 1 мкм, несмотря на их меньшую обнаружительную спо-
собность, представляется весьма актуальным. Полученные количественные оценки позво-
ляют корректно рассчитывать эффективность систем наблюдения в условиях, когда в
ближнем инфракрасном диапазоне контраст объекта выше, чем в видимом диапазоне.
Особое значение корректность таких расчетов имеет для проектирования систем скрытого
наблюдения, когда освещение контролируемой зоны видимым светом отсутствует.
СПИСОК ЛИТЕРАТУРЫ:
1. Телевизионный передающий прибор для области спектра 0.4–2.0 мкм / Г. И. Коршунова, Р. М. Сте-панов, Ю. В. Наумов, К. П. Андреева // Прикладная физика. 1999. № 3. С. 96–101.
2. Йесперс П. Г., де Виле Ф. В. Полупроводниковые формирователи сигналов изображения. М.: Мир, 1979. 575 с.
3. Ллойд Дж. Системы тепловидения. М.: Мир, 1978. 415 с. 4. Цыцулин А.К. Телевидение и космос: Учеб. пособие для вузов. СПб.: Изд-во СПбГЭТУ "ЛЭТИ", 2003. 225 с. 5. Роуз А. Зрение человека и электронное зрение. М.: Мир, 1977. 215 с. 6. Криксунов Л. З. Справочник по основам инфракрасной техники. М.: Сов. радио, 1978. 400 с. 7. Формозов Б. Н. Введение в криогенную микроэлектронику. СПб.: Наука, 2001. 328 с.
Рис. 3
эл , Вт элP
, мкмλ
1310−
1410−
1510−
0.6 0.7 0.8 0.9 1.0 0.8 0.9 1.0 , мкмλ
* 0.5 1, см Гц ВтD −⋅ ⋅
115 10⋅
105 10⋅
Рис. 4

30
D. М. Dzhamaludinov
CCD-MATRIX DETECTIVITY IN A NIAR INFRA-RED RANGE
Quantitative estimates of detectivity (threshold temperature and threshold capacity) CCD-matrix with red border 1.1 μm in a near infra-red range in absence of an external back-ground are derived.
CCD-matrix, a near infra-red range, estimate of detectivity
Статья поступила в редакцию 4 октября 2004 г.
УДК 615.471.03:616-072/073
Я. Фальк
ФОРМИРОВАНИЕ И ОБРАБОТКА СИГНАЛА
ИЗОБРАЖЕНИЯ В ЦИФРОВЫХ
РЕНТГЕНОТЕЛЕВИЗИОННЫХ СИСТЕМАХ
Рассмотрены принципы построения современных цифровых рентгенотелевизион-ных преобразователей изображений. Анализируются факторы, ответственные за их основные характеристики, определяются перспективные направления исследований в этой области, а также пути создания высокоэффективных телевизионных преобразо-вателей рентгеновских изображений.
Рентгенотелевизионные системы, преобразователи изображений, качество изображения
Формирование изображений высокого качества в цифровых телевизионных систе-
мах, применение дискретных преобразователей типа матриц ПЗС и КМОП, фотодиодных
матриц и других привели к широкому их внедрению в системы телевизионной (ТВ) рент-
генодиагностики. Многочисленные разработки таких систем, построенных на разных
структурных принципах, делают необходимым анализ состояния парка цифровых рентге-
нотелевизионных систем (РТС), принципов построения, а также факторов, определяющих
их основные характеристики. На базе такого анализа могут быть определены перспектив-
ные направления исследований в этой области и пути создания высокоэффективных РТС.
В литературе имеется достаточное количество сведений о рабочих характеристиках
РТС и принципах их построения [1]–[3]. Разработаны основы анализа прохождения сигна-
ла и шума в тракте усиления и обработки цифровых сигналов, однако цифровая ТВ-техни-
ка и способы формирования цифровых сигналов развиваются так стремительно, что тре-
буют постоянного обновления технического анализа в этой области.
Следует отметить, что разработка РТС для медицинской диагностики подчинена ре-
шению двух главных и принципиальных задач: снижению лучевой нагрузки на пациента и
улучшению качества (дешифрируемости) изображения с целью повышения эффективно-
сти диагностики [4]–[6].
Экран – оптика – ПЗС. Системы, основанные на съемке изображения с флюороскопи-
ческого экрана с помощью ТВ-преобразователя на ПЗС-матрице, получили широкое распро-
странение в аппаратуре ряда российских и зарубежных фирм. Принципы построения таких
систем очевидны: рентгеновское изображение преобразуется в видимое флюороскопическим
экраном; с помощью светосильного объектива это изображение проецируется на ПЗС-матри-
© Я. Фальк, 2004

31
цу; сигнал изображения после АЦП подвергается дальнейшей обработке и консервации. Одна
из главных причин широкого внедрения систем такого типа состоит в потенциальной воз-
можности формирования изображения качества выше получаемого на рентгенограмме. Од-
нако чувствительность такой системы ограничивается большими потерями света в оптиче-
ском звене: например, при использовании полудюймовой матрицы, экрана 400 × 400 мм и
объектива с относительным отверстием 1:0.75 эффективность использования светового пото-
ка составляет 5~ 4 10−⋅ . Повысить чувствительность РТС такого типа можно с использовани-
ем крупногабаритных матриц, например, 24.6 × 24.6 мм. Эффективность использования све-
тового потока при этом может составить 3~ 10− .
Существенное увеличение чувствительности РТС может быть достигнуто созданием
оптического узла на базе нескольких объективов (четырех и более) с последующей
"сшивкой" сформированных изображений. Эта идея реализована, например, в РТС фирмы
SwissRay: рабочее поле экрана разделено на четыре части, каждая из которых отдельным
объективом проецируется на свою ПЗС-матрицу. Изображение экрана формируется
"сшивкой" четырех составляющих. Нетрудно видеть, что с увеличением числа фрагмен-
тов, на которые делится поле изображения, преобразователь становится более плоским.
В качестве примера системы рассматриваемого типа приведем основные характери-
стики цифровой системы фирмы "Электрон" (Россия), построенной по описанной схеме [2]:
• размер рабочего поля...................................................................................... 390 × 390 мм;
• количество ПЗС-матриц ................................................................................. 1;
• число элементов изображения........................................................................ 2000 × 2000;
• контрастная чувствительность ....................................................................... 1.0…1.5 %;
• динамический диапазон.................................................................................. 180;
• доза на кадр (в плоскости детектора)............................................................. 1.0 мР;
• дисторсия изображения .................................................................................. 5 %.
РТС позволяет получать изображения с дозами не более 1 мР, что не превышает дозу
при рентгенографии на пленку. Исследования и разработку систем рассмотренного типа
можно считать перспективными.
Люминофор с вынужденной люминесценцией. Метод основан на использовании
люминесцентных экранов с запоминанием рентгеновских изображений и последующей их
визуализацией. Детектор рентгеновского изображения представляет собой люминесцент-
ный экран с вынужденной фотостимуляцией. Для визуализации рентгеновского изображе-
ния, сформированного в процессе экспонирования экрана, он активируется внешним ис-
точником света. С этой целью используется хорошо известная в телевидении система бе-
гущего светового луча. Сигнал изображения с выхода фотоэлектронного умножителя по-
ступает на АЦП и последующие каскады цифровой ТВ-системы. После считывания изо-
бражения экран засвечивается световым потоком видимой области спектра, восстанавлива-
ет свои начальные свойства и может быть использован для получения следующего снимка.
Подобные экраны имеют линейную амплитудную характеристику и большой динамиче-
ский диапазон (до 410 ) [7]. В системе считывания применяются акустооптический дефлек-

32
тор (по строке) и электромагнитный гальванометр (по кадру). При считывании используют
лазер с длиной волны 0.5105 мкм. Элементы остальной части цифровой РТС достаточно
традиционны. Построенная с использованием экрана с вынужденной фотостимуляцией
система фирмы "Фуджи Медикал" имеет следующие основные характеристики [2]:
• разрешающая способность (на объекте) .........................................3 1мм− ;
• контрастная чувствительность ........................................................1.0…2.0 %;
• динамический диапазон................................................................... 310 ;
• доза на кадр (в плоскости детектора).............................................. 1.0 мР< ;
• производительность.........................................................................20…60 снимков в час. К главным преимуществам рассмотренного метода относят возможность использования
его в традиционной рентгеновской аппаратуре, предназначенной для съемки на пленку. Вто-
рым важным преимуществом является возможность достаточно свободного выбора необходи-
мого рабочего поля приемника. Принципы построения систем этого типа находятся в поле по-
стоянного внимания фирм, занимающихся разработкой РТС медицинского назначения.
Матричные детекторы. Матричные детекторы рентгеновского изображения по-
строены по принципам преобразования рентгеновского излучения в световое или прямого
преобразования, например, на основе использования аморфного селена. Световое излуче-
ние преобразуется в электрический сигнал непосредственно на каждом элементе изобра-
жения, представляющем собой фотодиод. Эти элементы объединяются в матрицу (иголь-
чатый экран), а считывание сигнала производится их коммутацией по закону ТВ-разверт-
ки. При таком построении преобразователя существенно снижаются потери света после
визуализации изображения. Появляется возможность увеличения толщины преобразова-
теля без ухудшения его разрешающей способности. Несмотря на кажущуюся простоту
рассмотренного принципа создание РТС на его базе связано с большими технологически-
ми трудностями (подбор материала, обладающего большим коэффициентом поглощения
рентгеновского излучения и высокой квантовой эффективностью, синтез экрана, комму-
тация элементов и др.). Интенсивные разработки подобных РТС проводятся фирмами
Франции, США и других стран. Например, плоский приемник Pixium 4600 фирмы
TRIXELL имеет следующие рабочие характеристики [2]:
• размер рабочего поля...................................................................................... 426 × 432 мм;
• число элементов матрицы............................................................................... 2981 × 3021;
• разрешающая способность ............................................................................. 3.5 1мм− ;
• динамический диапазон..................................................................................410 .
Элементы матрицы собраны в панель толщиной 45 мм, что позволяет использовать
ее в стандартных пленочных аппаратах. Исследования в области создания устройств рас-
смотренного типа, безусловно, можно отнести к перспективным, однако возможность их
внедрения определяется уровнем развития современной электроники и технологии.
Обработка изображений. Цифровая обработка позволяет улучшить качество изо-
бражения, предъявляемого для анализа рентгенологу, а также выделить признаки, которые
несут наибольшую информационную нагрузку. Эффективность рассмотренных ранее, на

33
взгляд автора, перспективных РТС может быть повышена за счет использования цифро-
вой обработки сигналов изображения:
• нелинейных преобразований сигналов с целью улучшения качества воспроизведения
градаций плотности в информативных участках изображения;
• коррекции частотных искажений;
• коррекции сигнала по полю изображения с целью уменьшения влияния неравномерно-сти рентгеновского потока и искажений, возникающих в процессе преобразования;
• сегментации изображения с целью выделения информативных участков;
• оптимизации контраста изображения;
• обострения контуров деталей изображения и др.
Важным составным элементом процедуры рентгенодиагностики является архивирова-
ние. При архивировании статических изображений могут использоваться достаточно про-
стые программные средства кодирования сигнала, например предусмотренные стандартом
JPEG, основанном на дискретном косинусном преобразовании (ДКП) – одном из наиболее
эффективных методов кодирования сигналов изображений [8]. Его дальнейшее развитие
осуществлено в стандарте сжатия статических изображений JPEG-2000 (ISO/IEC
JTC1/SC29/WG1 N1583), базирующемся на дискретном вейвлет-преобразовании. Этот стан-
дарт обеспечивает эффективное кодирование, возможность сжатия без потерь, прогрессив-
ное представление с пошаговым увеличением разрешения, достаточно высокую устойчи-
вость к ошибкам в канале связи, возможность избирательного доступа к отдельным частям
изображения. В отличие от кодирования с использованием ДКП вейвлет-преобразование
применяется к изображению в целом, а не к отдельным блокам. При кодировании сигнал
подвергается фильтрации по частотным полосам с последующей децимацией каждого вто-
рого отсчета, при декодировании отброшенные отсчеты восстанавливаются интерполяцией.
Используя эти процедуры, можно реализовать многоуровневую декомпозицию изображения.
При проектировании РТС одной из важнейших характеристик, подлежащих оптими-
зации, является характер преобразования сигнала и шума в отдельных каскадах формиро-
вания, передачи и обработки сигнала изображения. Отношение сигнал/шум влияет на про-
странственную и градационную разрешающие способности, контрастную чувствитель-
ность, квантовую эффективность системы. В связи с этим при разработке РТС анализиру-
ется прохождение сигнала и шума через отдельные звенья [4], [9], что позволяет выявить
узкие звенья системы и наметить пути их совершенствования. Анализ прохождения сиг-
нала и шума в системах для рентгеноскопии, работающих при дозах на кадр не более
4 мкР, рассмотрен в [4].
Анализ упомянутых работ позволяет сформировать общий взгляд на перспективы
разработок в рассматриваемой области и отнести к числу актуальных:
• исследования с целью повышения квантовой эффективности РТС;
• анализ преобразований сигнала и шума в системе с целью уменьшения потерь в про-
цессе усиления и обработки сигнала;
• разработку методов цифровой обработки видеосигналов с целью повышения дешифри-руемости и архивации результатов диагностики.

34
СПИСОК ЛИТЕРАТУРЫ
1. Блинов Н. Н., Мазуров А. И. Современная роль рентгеновской техники в медицинской интроскопии
// Медицинская техника. 1998. № 6. С. 3–5. 2. Рентгеновские диагностические аппараты: В 2 т. / Под ред. Н. Н. Блинова, Б. И. Леонова. М.:
ВНИИИМТ, НПО "Экран", 2001. Т. 1 220 с.; Т. 2 208 с. 3. Stender, H.-S. Bildqualitaet in Roentgentechnik. Koeln: Deutscher Aerzteverlag, 1990. 248 s.
4. Телевизионные методы обработки рентгеновских и гамма-изображений / Н. Н. Блинов, Е. М. Жуков, Э. Б. Козловский, А. И. Мазуров. М.: Энергоатомиздат, 1982. 232 с.
5. Вейп Ю. А., Мазуров А. И., Элинсон М. Б. Усилители рентгеновского изображения с цифровым вы-ходом // Медицинская техника. 1998. № 6. С. 10–13.
6. Кантер Б. М. Методы и средства малодозовой цифровой флюорографии // Медицинская техника. 1999. № 5. С. 10–13.
7. Козловский Э. Б. Измерение динамического диапазона цифровых систем визуализации рентгенов-ских изображений // Медицинская техника. 2000. № 5. С. 26–28.
8. Цифровое преобразование изображений: Учеб. пособие для вузов / Р. Е. Быков, Р. Фрайер, К. В. Ива-нов, А. А. Манцветов; Под ред. проф. Р. Е. Быкова. М.: Горячая линия – Телеком, 2003. 228 с.
9. Мазуров А. И., Фальк Я. Я. Квантовая эффективность цифровых рентгенотелевизионных камер // Те-левидение: передача и обработка изображений: Материалы 3-й междунар. конф., СПб., 5–6 июня 2003 г.
СПб.: Изд-во СПбГЭТУ "ЛЭТИ", 2003. С. 82–83.
J. Falk
FORMATION AND PROCESSING OF THE PICTURE SIGNAL IN DIGITAL X-RAY TV SYSTEMS
Principles of construction modern digital X-Ray TV-converters of images are considered. Factors responsible for their basic characteristics are analyzed and perspective directions of researches in this area, and also a way of creation of highly effective television converters of X-Ray images are defined.
X-ray TV-systems, image converters, image quality
Статья поступила в редакцию 10 ноября 2004 г.
УДК 621.396.67.01
Г. А. Костиков, М. И. Сугак
ХАРАКТЕРИСТИКИ ПЛОСКИХ СЛАБОНАПРАВЛЕННЫХ
ИМПУЛЬСНЫХ ИЗЛУЧАТЕЛЕЙ
Представлены результаты теоретического и экспериментального исследования плоских слабонаправленных широкополосных антенн, предназначенных для работы в импульсном режиме. Выполнена сравнительная оценка энергетических коэффициентов усиления этих антенн.
Печатные антенны, импульсный режим, возбуждение СКИ, электродинамический анализ во временной области
При проектировании сверхширокополосных систем различного назначения часто возни-
кает потребность в слабонаправленных компактных, технологичных антеннах, удобных в экс-
плуатации. данному требованию в значительной степени удовлетворяют печатные антенны,
однако в этом случае достижение качественных электрических характеристик является серьез-
ной проблемой. Так, например, в работах [1], [2] с этой целью в плоскую печатную антенну
© Г. А. Костиков, М. И. Сугак, 2004

35
"bow-tie" введены резистивные элементы. К сожалению, авторы этих исследований не приводят
данных о влиянии искусственных потерь в антеннах на их энергетические характеристики.
В настоящей статье представлены результаты теоретического и экспериментального
исследования двух типов передающих импульсных антенн, обладающих различными га-
баритами и характеристиками. Представленные материалы в своей расчетно-теоретичес-
кой части основаны на численном электродинамическом методе анализа непосредственно
во временной области, применявшемся авторами ранее в работах [3]–[6]. Для объективной
сравнительной оценки свойств различных антенн определялись энергетический коэффи-
циент направленного действия (ЭКНД) и коэффициент полезного действия (КПД) при
конкретной форме возбуждающего импульса.
В качестве объектов исследований были выбраны два варианта печатных антенн:
• Вариант 1 – малогабаритная антенна, обеспечивающая излучение части энергии сигнала со спектром, лежащим в интервале частот 1…2 ГГц. Здесь упор делается на умень-шение размеров антенны, поэтому следует ожидать низкого КПД в фидерном тракте.
• Вариант 2 – антенна, обеспечивающая излучение части энергии сигнала со спек-тром, лежащим в интервале частот 0.5…1.0 ГГц (желательно до 2.0 ГГц). В этом варианте допустимы бóльшие размеры раскрыва.
Конструктивно антенны выполнены плоскими, причем они допускают возможность
работы без развитой земляной плоскости значительных размеров. Из практики использо-
вания импульсных систем понятно, что эти варианты антенн являются в значительной
степени компромиссом между требуемыми электрическими характеристиками и габари-
тами, так как очень часто исходный сигнал имеет существенно более широкий спектр, чем
заявленная ранее полоса рабочих частот антенн. По энергетическому коэффициенту уси-
ления (ЭКУ), равному произведению ЭКНД на КПД, оба варианта должны уступать ан-
теннам существенно бóльших размеров, например антенне Вивальди [3], [6], рассчитан-
ной для той же длительности импульса.
Целью настоящей статьи является представление результатов оценки энергетиче-
ских характеристик этих сравнительно малогабаритных конструкций антенн.
Рис. 1, а представляет геометрию антенн, рис. 1, б – их топологию; на рис. 2 показаны
экспериментальные макеты. Излучатели выполнены по схеме несимметричного вибратора,
в одно из плеч которого включена последовательно емкостная нагрузка для расширения
полосы рабочих частот [7]. В данном случае роль такой нагрузки выполняют плоские пе-
рекрывающиеся отрезки верхнего плеча антенны и пассивного элемента. Размеры подлож-
ки первого варианта составляют 120 100 мм× , 80 ммL = , 13 ммa = , 65 ммh = , материал
подложки FR-4 толщиной 2 мм; для второго варианта использована подложка из того же
материала размером 168 207 мм× , 160 ммL = , 45 ммa = , 110 мм.h =
Такое решение можно трактовать и как вибраторную антенну с распределенным эле-ментом связи в одном плече [8], [9]. Степень связи между одним из плеч вибратора и пас-
сивным элементом регулируется размером взаимной площади перекрытия, пропорцио-
нальной z∆ , соответствующей величине перекрытия металлических пластин с разных
сторон диэлектрика (рис. 1, б). При малой площади (малая емкость) пассивный элемент
возбуждается слабо и не влияет существенно на частотную характеристику; большая

36
площадь эквивалентна короткому замыканию и сдвигает резонансную частоту вибратора
в сторону низких частот. Оптимальная емкость позволяет реализовать частотную характе-
ристику антенны с максимальной рабочей полосой.
Рис. 3 иллюстрирует это положение. Здесь представлена частотная зависимость (рас-
четные данные) коэффициента отражения антенны 11S (вариант 1) для разных величин пе-
рекрытия пластин (емкости элемента связи). Отчетливо просматривается оптимальное зна-
чение величины этого элемента. Так слабой связи ( )10 ммz∆ = соответствует полоса частот
1.3…1.75 ГГц по критерию 11 10 дБS < − . Для сильной связи ( )20 ммz∆ = входное сопро-
тивление существенно отличается от вы-
бранного волнового сопротивления питаю-
щего фидера (50 Ом) и уровень согласования
в требуемой полосе частот неудовлетвори-
тельный, а резонансная частота около
1.1 ГГц. Оптимум достигается для параметра
z∆ , лежащего в интервале от 0 до 10 мм.
Экспериментальное исследование выполня-
лось для 10 ммz∆ = .
Рис. 3
, ГГцf0.5 1.0 1.5 2.0
11, дБS
– 15
– 5
0 10 ммz∆ = −
20
0
– 10
– 20 10
x
y
z
θ
ϕ
r
Пассивный элемент
z∆
h
L
a
Металли-зация
Диэлектрическая подложка
Излучающий элемент
а б
Рис. 1
Рис. 2
Вариант 1 Вариант 2

37
Полученные частотные зависимости коэффициента стоячей волны (КСВ) для первого
варианта антенны (рис. 4) показывают хорошее согласие между расчетными и экспери-
ментальными результатами. Требуемая полоса частот реализуется по критерию
КСВ 2.5< . По уровню КСВ 2= обеспечивается полоса частот 1.05…1.85 ГГц.
На рис. 5 приведена частотная зависимость КСВ для варианта 2 передающей антенны,
оптимизированной на максимум полосы при ограничении на размеры (экспериментальные
и теоретические данные). Здесь по критерию КСВ 2< достигнута полоса частот 0.46…1.05
ГГц. Размеры этого варианта передающей антенны 168 207 мм× , 160 ммL = , 45 ммa = ,
110 ммh = , материал FR-4 толщиной 2 мм. Все измерения проводились на приборе Net-
work Analyser HP8720B.
Расчетные угловые зависимости ЭКНД излучателя (вариант 1) для сигнала длитель-
ностью 1 нс по уровню 0.1 (гауссовский импульс) представлены на рис. 6, а (азимутальная
плоскость) и рис. 6, б (угломестная плоскость для азимутальных углов 0 и 90ϕ = ° ° ). За-
метная асимметрия в азимутальной плоскости обусловлена плоской конструкцией излуча-
теля и влиянием диэлектрической подложки. Несимметричность плеч излучателя приво-
дит к отклонению максимума ЭКНД в угломестной плоскости. Расчет производился чис-
ленно, непосредственно во временной области в строгом соответствии с определением
ЭКНД, представленным в работе [10].
Рис. 4 Рис. 5
, ГГцf0.2 0.8
Расчет
1
2
3
КСВ
1.4
Эксперимент
, ГГцf0.8 1.2
Расчет
1
2
3
КСВ
1.6
Эксперимент
1
0 30
60
90
120
150 180
210
240
270
300
330 D
, ϕ °…
0
1
0 30
60
90
120
150 180
210
240
270
300
330 D
, θ °…
0
90ϕ = °
0ϕ = °
а б
Рис. 6

38
Рис. 7, 8 дают представление о временных характеристиках антенны∗ (вариант 1). На рис. 7 показано изменение амплитуды вектора напряженности электрического поля в дальней
зоне ( )E t для двух азимутальных направлений и угла места 90θ = ° . Видно, что изменение
азимутального угла наблюдения практически не сказывается на форме сигнала и приводит лишь к малому изменению амплитуды излучаемого импульса. Форма сигнала слабо меняется и при изменении угла места (рис. 8), но это изменение все-таки значительно заметнее.
Перейдем к рассмотрению переходных процессов в тракте питания антенны. На
рис. 9 показаны формы падающего ( )пU и
отраженного сигналов ( )отрU (антенна по
варианту 1) в фидере с волновым сопротив-лением 50 Ом. Для антенны столь малых размеров по сравнению с пространственной длительностью импульса уровень отражен-ного сигнала весьма велик и КПД фидера (отношение энергии отраженного сигнала к
энергии возбуждающего импульса) составил 9.4 %. Следует заметить, что здесь не учтены тепловые потери в подложке и металлической части антенны.
Для варианта 2 расчетные временные зависимости представлены на рис. 10, 11. Вид-но, что интервал между нулями временных функций этого варианта антенны существенно больше, чем для варианта 1 (рис. 7, 8).
∗ Здесь и далее временные зависимости поля рассчитаны на расстоянии 10 м от центра антенны, что соот-
ветствует условию дальней зоны.
Рис. 7 Рис. 8
90ϕ = °
0°
, нсt34
, В мE
0
0.1
– 0.1
– 0.2
– 0.335 36 37
90θ = °
30θ = °
60°
, нсt34
, В мE
0
0.1
– 0.1
– 0.2
– 0.335 36 37
90ϕ = °
90°
0 – 0.2
0.2
0.6
п maxU U
2 , нсt
пU отрU
Рис. 9
Рис. 10 Рис. 11
90ϕ = °
0°
, нсt34
, В мE
0.2
– 0.2
– 0.435 36 37
90θ = °
0
90θ = °60°
, нсt34
, В мE
0.1
– 0.1
– 0.3
– 0.535 36 37
90ϕ = °
30°

39
Угловые зависимости ЭКНД (антенна по варианту 2) даны на рис. 12 для того же
возбуждающего импульса. Здесь наблюдается более заметный подъем максимума в угло-
местной плоскости, вызванный большей электрической длиной антенны.
На основе кривых, приведенных на
рис. 13, можно сделать вывод, что КПД фи-
дерного тракта низкочастотной антенны
(вариант 2) больше, чем у высокочастотно-
го. Действительно, расчет показывает, что
КПД фидера в этом случае составляет 28 %.
Представленные данные позволяют
говорить о расчетных значениях энергети-
ческого коэффициента усиления
( )ЭКУ КПД ЭКНД= ⋅ антенн в нормальном
направлении, равных 0.16 ( )7.97 дБ− и 0.476 ( )3.22 дБ− для первого и второго вариантов
антенн соответственно. Для второго варианта антенны в направлении 75θ = ° ЭКУ со-
ставляет 0.56 ( )2.5 дБ− . Заметим, что увеличение ЭКУ второго варианта по сравнению с
первым (примерно на 4.7 дБ) следует отнести, главным образом, за счет улучшения его
согласования с фидером, так как из приведенного ранее материала видно, что ЭКНД в
обоих случаях отличаются незначительно.
СПИСОК ЛИТЕРАТУРЫ
1. Максимович Е. С., Михнев В. А., Вайникайнен П. Использование модифицированной дипольной ан-тенны в подповерхностных радарах со ступенчатой перестройкой частоты // 14-я Междунар. Крымская конф. "СВЧ-техника и телекоммуникационные технологии" (Крымико 2004), Севастополь, 13–17 сентября 2004 г. Севастополь: Вебер, 2004. C. 331–333.
2. Clarke R. W. A High Efficiency Bow-tie antenna for impulse propogation // Microwave Journal. 2001. Vol. 44, № 8. P. 94–105.
3. Экспериментальное исследование антенны Вивальди в импульсном режиме / А. А. Головков, Д. А. Ка-линикос, Г. А. Костиков, М. И. Сугак // Изв. СПбГЭТУ "ЛЭТИ". Сер. "Радиоэлектроника и телекоммуника-ции", 2003. Вып. 2. С. 13–16.
0 – 0.2
0.2
0.6
п maxU U
2 , нсt
пU
отрU
4
Рис. 13
0 30
60
90
120
150 180
210
240
270
300
330 D
, ϕ °…
0
1
0 30
60
90
120
150180
210
240
270
300
330 D
, θ °…
90ϕ = °
0ϕ = °
1
0
а б
Рис. 12

40
4. Костиков Г. А., Лавренко Б. Е., Сугак М. И. Кроссполяризационные эффекты при импульсном излучении ТЕМ-рупора // Изв. СПбГЭТУ "ЛЭТИ". Сер. "Радиоэлектроника и телекоммуникации". 2003, Вып. 2. С. 29–32.
5. Костиков Г. А., Сугак М. И. Энергетические характеристики длинного монополя при импульсном возбуждении // Изв. вузов России. Радиоэлектроника. 2003. Вып.4. С. 12–19.
6. Характеристики антенны Вивальди в импульсном режиме / А. А. Головков, Д. А. Калиникос, Г. А. Кости-ков, М. И. Сугак // 14-я Междунар. Крымская конф. "СВЧ-техника и телекоммуникационные технологии" (Кры-мико 2004), Севастополь, 13–17 сентября 2004 г. Севастополь: Вебер, 2004. C. 334–335.
7. Сугак М. И., Юров Ю. Я. Приближенный метод синтеза широкополосного нагруженного вибратора // Изв. вузов. Радиоэлектроника. 1985. Т. 28, № 5. С. 20–23.
8. Степанов В. В., Сугак М. И. Математическое моделирование вибраторных антенн с распределенными элементами связи // Обработка сигналов в радиотехнических и телевизионных устройствах и системах СПб, 1996. С. 86–90. (Изв. ГЭТУ. Вып. 499)
9. Степанов В. В., Сугак М. И. Исследование частотных характеристик вибратора с распределенным элементом связи // Обработка сигналов и полей в информационных радиосистемах. СПб, 1994. С. 82–87. (Изв. ГЭТУ. Вып. 473)
10. Авдеев В. Б. Энергетические характеристики направленности антенн и антенных систем при излучении и приеме сверхширокополосных сигналов и сверхкоротких импульсов // Антенны. 2002. Вып. 7 (62). С. 5–27.
G.A. Kostikov, M. I. Sugak
CHARACTERISTICS OF THE PLANAR NEAR OMNI-DIRECTIONAL IMPULSE RADIATOR
Results of the theoretical and experimental investigation planar near omni-directional ul-tra-wideband antennas are produced. The comparisons quantitative assessments of the ener-getic gain these antennas are realized.
Planar antennas, impulse mode, ultra-short impulse excitation, electrodynamic analysis
Статья поступила в редакцию 15 октября 2004 г.
УДК 621.372.54
В. Н. Малышев, Б. Е. Лавренко
СИНТЕЗ И ЭЛЕКТРОДИНАМИЧЕСКОЕ МОДЕЛИРОВАНИЕ
ВСТРЕЧНО-ШТЫРЕВЫХ ФИЛЬТРОВ
Представлена методика проектирования встречно-штыревых фильтров по задан-ным рабочим характеристикам с использованием цепной и электродинамической моде-лей. Сопоставлены результаты моделирования различными методами, получена оценка допустимой рабочей мощности по критерию электропрочности.
Встречно-штыревые фильтры, АЧХ, ГВЗ, мощность, полоса пропускания, вносимое затухание, электродинамическое моделирование
Встречно-штыревые фильтры представляют одну из удачных реализаций полосно-
пропускающих фильтров СВЧ и позволяют получить характеристики, близкие к характе-
ристикам соответствующего прототипа. Наилучшим типом линии для встречно-штыревых
фильтров можно считать симметричную полосковую с воздушным заполнением, с прямо-
угольными или круглыми штырями. Используемая обычно процедура приближенного
синтеза встречно-штыревых фильтров [1] основана на целом ряде упрощающих допуще-
ний, погрешность которых трудно оценить заранее. Чаще всего реализуется чебышевская
(равноволновая в полосе пропускания) амплитудно-частотная характеристика (АЧХ).
Наибольшую проблему представляет обеспечение необходимого затухания в полосе про-
пускания, которое при использовании воздушного заполнения определяется потерями в
© В. Н. Малышев, Б. Е. Лавренко, 2004

41
металле. Существенным также может оказаться ограничение на мощность, связанное с
возможным пробоем из-за высоких градиентов поля на ребрах элементов фильтра.
Однако при сравнительно высоких порядках (5…11) приближенный синтез встреч-
но-штыревых фильтров не гарантирует получение приемлемого результата. Характери-
стика фильтра оказывается полностью разрушенной из-за различия свойств реальной кон-
струкции и ее упрощенной модели, принимаемой при синтезе. Настройка же подобного
фильтра представляет весьма сложную многопараметрическую задачу. В связи с этим
чрезвычайно важно построить методику, обеспечивающую достаточную точность проек-
тирования встречно-штыревых фильтров с заданными характеристиками, позволяющую
оптимизировать фильтр по вносимому затуханию с учетом свойств реального металла и
дающую возможность оценить электропрочность фильтра.
Предлагаемая методика проектирования встречно-штыревых фильтров проиллюст-
рирована на примере синтеза полосно-пропускающих фильтров 7-го порядка для веща-
тельных ТВ-передатчиков с полосой пропускания 7.2 МГц, очень жесткими требованиями
по согласованию (КСВ < 1.1) и вносимому затуханию (лучше 1 дБ) в полосе пропускания.
Синтез встречно-штыревых фильтров в пакете Microwave Office. Пакет Micro-
wave Office включает универсальную встроенную процедуру фильтров, которая позволяет
синтезировать фильтры с различными типами АЧХ (Баттерворта и Чебышева; ФНЧ, ППФ
и ФВЧ) на базе разнообразных типов линий и вариантов реализации. В частности, можно
задать основные требования к характеристике фильтра, выбрать порядок аппроксимации
АЧХ, выбрать вариант реализации, тип и свойства линий.
После выполнения процедуры синтеза встречно-штыревого фильтра пакет формирует
схемное представление фильтра (рис. 1, а) на базе квазистатической модели многосвязной
симметричной полосковой линии. Здесь 1 9W W… – многополюсник, замещающий при
моделировании реальную электродинамическую структуру, состоящий из отрезков двух-
проводной линии (stripline); 10 16W W… – отрезки разомкнутых линий; цифрами 1…18
обозначены выходы многополюсника. Топология элементов фильтра показана на рис. 1, б,
где 1 и 5 – слои металлизации; 2 и 4 – слои диэлектрика (в частности, воздух); 3 – штырь.
К сожалению, данная модель учитывает лишь концевые эффекты на свободных концах
штырей, влияние же боковых стенок фильтра не учитывается. Для удобства последующей
оптимизации фильтра модель параметризируется.
а б
Рис. 1
1
2
3 4
5

42
Результаты анализа, представленные на рис. 2 (S1.1 – коэффициент отражения; S2.1
– АЧХ) показывают, что характеристики синтезированного фильтра (точнее, его модели)
оказываются далеки от желаемых. Для достижения "грубых" результатов можно восполь-
зоваться опцией "Tune", которая позволяет пользователю оперативно менять значения па-
раметров и контролировать АЧХ. В частности, регулировкой длины штырей можно скор-
ректировать рабочую частоту фильтра. Можно также проанализировать влияние всех па-
раметров фильтра на АЧХ.
Благодаря сравнительно малому времени анализа квазистатической модели много-
связной линии пакет Microwave Office позволяет организовать эффективную параметри-
ческую оптимизацию, варьируя геометрические параметры линий, образующих фильтр.
Для этого необходимо сформировать целевую функцию из набора критериев. В данном
случае это требования к согласованию и вносимому затуханию в полосе пропускания, а
также требования по затуханию вне полосы пропускания. В ходе процесса оптимизации
программа находит наилучшую геометрию в рамках заданной маски АЧХ (рис. 2, 1). Сто-
ит отметить, что успешная оптимизация возможна лишь в том случае, когда предвари-
тельно были грубо определены номиналы параметров.
Детально исследовалось влияние различных параметров фильтра на итоговую харак-
теристику. Такие параметры, как расстояние между широкими стенками, толщина и ши-
рина штырей сравнительно слабо влияют на АЧХ, а расстояние между штырями – очень
сильно, и допуск можно оценить в десятые доли миллиметра. Именно изменением зазоров
между штырями можно настраивать фильтр.
Толщину стержней представляется разумным выбрать по критерию минимума вноси-
мого затухания в полосе пропускания. Ширину стержней можно сделать одинаковой и за-
фиксировать, что выгодно по конструктивно-технологическим соображениям. Также целе-
сообразно при варьировании зазоров между штырями поддерживать постоянной длину всей
конструкции и, соответственно, расстояние между входным и выходным разъемами.
Ввиду того, что фильтры проектируются для использования на высоких уровнях
мощности, вносимое фильтром затухание в полосе пропускания должно быть минималь-
но. У оптимизированного фильтра при использовании в качестве материала металлизации
серебра, а в качестве диэлектрика – воздуха оно лежит в пределах 0.5...0.8 дБ (рис. 2).
Представляет значительный практический интерес поиск путей снижения затухания, а
также оценка его предельного значения.
Рис. 2 Рис. 3
1

43
Одной из важных характеристик фильтров такого порядка является групповое время
задержки (ГВЗ) как функция частоты (рис. 3). У проектируемого фильтра вариация ГВЗ в
полосе пропускания составляет 250 нс, что вполне приемлемо.
Однако ожидать достаточной точности от схемного моделирования столь сложной
структуры, как встречно-штыревой фильтр, априори не следует, поэтому было предприня-
то полномасштабное электродинамическое моделирование проектируемых фильтров.
Электродинамическое моделирование встречно-штыревых фильтров в пакете
Microwave Studio. Электродинамическое моделирование встречно-штыревых фильтров,
особенно при высоких порядках, представляет сложную задачу даже для современных
ЭВМ. Заметные относительные размеры (длина – в несколько длин волн), сочетание срав-
нительно больших и сравнительно малых зазоров между штырями, необходимость учета
особенностей геометрии узлов ввода-вывода осложняют моделирование. Схемное моде-
лирование показало, что чувствительность характеристик фильтра к изменению отдель-
ных размеров (в первую очередь, зазоров между штырями) очень высока – речь идет о
точности в десятые доли миллиметра. В вязи с этим к модели, используемой при электро-
динамическом моделировании предъявляются очень самые жесткие требования. Необхо-
дим также учет влияния омических потерь в металле.
Трехмерная электродинамическая модель синтезированного фильтра была реализо-
вана в пакете Microwave Studio (рис. 4). Элементы конструкции сформированы из мате-
риала, соответствующего реальному металлу, а диэлектрик (воздух) идеализирован.
Модель возбуждается коаксиальными портами с последующим контролем их свойств
(как по структуре поля, так и по волновому сопротивлению, равному 50 Ом) и далее пара-
метризуется по всем геометрическим размерам. Для сокращения времени моделирования
используется плоскость симметрии (в среднем сечении штырей и портов).
Анализ полученной структуры в частотной области показывает, что АЧХ, хоть в це-
лом и сформирована, значительно отличается от требуемой – по центральной частоте, по
ширине полосы пропускания, а особенно по недостаточному согласованию в полосе про-
пускания. В результате моделирования выявлено, что основная причина этих отличий – на-
личие конструктивного смещения штырей по отношению друг к другу, не учтенное в квази-
статической модели многосвязной линии на предыдущем этапе, а также влияние торцевых
и боковых стенок корпуса. Смещение штырей можно приближенно учесть в схемной моде-
ли, введя отрезки линий между торцами связанных линий и короткозамыкателями (рис. 5,
Рис. 4

44
17 25W W… ) и соответственно уменьшив длину области связи. Повторные расчеты в пакете
Microwave Office показывают, что параметрическая оптимизация с варьированием только
зазоров между штырями позволяет вернуть АЧХ в требуемые пределы, что означает прин-
ципиальную возможность практической настройки фильтра, однако можно убедиться, что
ручная настройка ("Tune") даже при эффективном анализе чрезвычайно трудоемка.
Повторное электродинамическое моделирование показывает, что оптимизированный
с учетом эффекта продольного смещения штырей фильтр демонстрирует удовлетвори-
тельное согласие полученных схемным и электродинамическим моделированиями харак-
теристик с заданными требованиями. Возможно, требуется небольшая (1...2 %) коррекция
длины штырей для уточнения настройки рабочей частоты. Однако необходим тщательный
выбор шага сетки, используемой в электродинамической модели. Фактически приходится
выбирать до 100...120 отсчетов на длину волны, и режим адаптивного выбора шага сетки
приводит к такому же результату.
Моделирование в частотной области в пакете Microwave Studio не позволяет учесть по-
тери в металле, и потому вносимое затухание фильтра таким образом оценить невозможно.
Моделирование во временной области решает эту проблему, хотя и занимает значительно
больше времени. Рис. 6 демонстрирует результаты такого расчета. Видно, что значения зату-
хания в полосе пропускания остаются в допустимых пределах. Из сравнения рис. 2 и 6 следу-
ет, что результаты, полученные обоими методами моделирования, хорошо согласуются между
собой. Стоит отметить весьма высокую степень совпадения результатов расчетов во времен-
ной и частотной областях, исключая, разумеется, вносимое затухание в полосе пропускания.
Электродинамическое моделирование позволяет получить представление о распреде-
лении поля, найти области с наибольшими его значениями (это зоны вблизи свободных тор-
цов штырей) и определить максимальное значение напряженности электрического поля, свя-
зав его с мощностью на входе фильтра. На рис. 7 представлено электрическое поле в самой
критичной области фильтра – в районе свободных торцов штырей. Аналогично исследуется
распределение тока по стенкам конструкции и выявляются зоны максимального нагрева. Все
эти результаты необходимы для оценки максимальной рабочей мощности фильтра.
Рис. 5 Рис. 6

45
Результаты и выводы. Представлен-
ная методика обеспечивает достаточную
точность проектирования встречно-
штыревых фильтров с заданными характе-
ристиками, позволяет оптимизировать
фильтр по вносимому затуханию с учетом
свойств реального металла и дает возмож-
ность оценить электропрочность фильтра.
Заметим, что эффективная настройка
и/или оптимизация структуры фильтра при
сравнительно продолжительном (десятки минут – часы) электродинамическом моделировании
практически невозможна и без предварительного синтеза в режиме схемного моделирования
поставленную задачу решить было бы сложно. В связи с этим предлагается итерационная
многоступенчатая методика, включающая приближенный синтез, параметрическую оптими-
зацию на квазистатической модели с фиксацией некоторых размеров, электродинамическое
моделирование и, возможно, повтор процедур синтеза и оптимизации.
Приведенные результаты показывают, что при учете важнейших особенностей кон-
струкции электродинамическая модель встречно-штыревого фильтра демонстрирует ха-
рактеристики, близкие к характеристикам фильтра, синтезированного на этапе схемного
проектирования.
Методика может быть использована при построении фильтров для вещательных
ТВ-передатчиков. Она может быть также модифицирована для проведения настройки из-
готовленных фильтров.
СПИСОК ЛИТЕРАТУРЫ
1. Маттей Д. Л., Янг Д., Джонс Е. М. Т. Фильтры СВЧ, согласующие цепи и цепи связи. М.: Связь, 1972. 494 с.
2. Роудз Дж. Д. Теория электрических фильтров. М.: Сов. радио, 1980. 240 с.
V. N. Malyshev, B. E. Lavrenko
SYNTHESIS AND ELECTRODYNAMICS MODELING OF THE INTERDIGITAL FILTERS
Iinterdigital filters design using schematic and electromagnetic models is presented. Computer simulation results with different techniques are compared. Maximum operation power of designed filters is evaluated.
Interdigital filter, frequency response, group delay, power, passband, attenuation, electromagnetic simulation
Статья поступила в редакцию 29 октября 2004 г.
Рис. 7

46
УДК 621.396.62
Нгуен Тхань Хынг
ПОВЫШЕНИЕ УГЛОВОЙ ТОЧНОСТИ ФАЗОВО-ФАЗОВЫХ
МОНОИМПУЛЬСНЫХ РЛС ПРИ СОПРОВОЖДЕНИИ
НИЗКОЛЕТЯЩИХ НАД МОРЕМ ЦЕЛЕЙ НА ПРОХОДЕ
Теоретически и методом математического моделирования проведен анализ влия-ния отражений от морской поверхности на угловую ошибку фазово-фазовых моноим-пульсных РЛС. Для повышения точности определения по углу места низколетящих це-лей предложено использовать алгоритм коррекции результата измерения угломестной координаты. Приведена оценка качества синтезированного алгоритма.
Квазинепрерывная моноимпульсная РЛС, низколетящие цели, сопровождение на проходе, угловая точность, антипод
Расширение использования на судах вертолетов и самолетов ледовой разведки, со-
вместное применение судов и самолетов в спасательных и производственных работах на
море делают актуальным для судовых трехкоординатных РЛС обеспечение высокой точ-
ности пеленгации воздушных целей по углу места. Одним из технических решений про-
блемы одновременного повышения темпа обзора и точности пеленгации по углу места
моноимпульсных (МИ) РЛС является применение фазового пеленгатора, основное пре-
имущество которого по сравнению с амплитудным пеленгатором заключается в использо-
вании моноимпульсного метода пеленгации для РЛС, имеющих произвольную (несим-
метричную) форму амплитудной диаграммы направленности (ДН) антенны. В настоящей
статье рассматривается трехкоординатная РЛС, измеряющая дальность, азимут и угол
места цели и имеющая два широких луча антенн в вертикальной плоскости ( )εF [1].
При обнаружении и сопровождении низколетящих целей (НЛЦ) над морем приходится
учитывать влияние отражений от границы раздела двух сред – атмосферы и морской по-
верхности (рис. 1). Эти отражения способствуют возникновению антипода (рис. 1, точка Ц′ ),
что приводит к неоднозначности измерений угла места и снижению угловой точности об-
зорных МИ РЛС морского базирования. Цель статьи – анализ ошибок измерения угла места
НЛЦ (рис. 1, точка Ц ) в фазово-фазовых квазинепрерывных РЛС, работающих в режиме со-
провождения на проходе (СНП), и разработ-
ка алгоритма коррекции, повышающего
точность пеленгации по углу места.
Рассмотрим точность определения
угла места (УМ) ε НЛЦ в фазово-фазовой
РЛС при режиме СНП. В данном случае
сигналы, отраженные от НЛЦ и ее антипо-
да, могут быть представлены следующими
выражениями [2]:
( ) ( ) ( ) ( )1 пр пр отр отр, ε exp ω ε exp ω α ;E t E F i t E F i tε = + +ɺ
аh
цh
прR
отрR
прε
отрε
РЛС
Морская поверхность
Ц
Ц′
Рис. 1
© Нгуен Тхань Хынг, 2004

47
( ) ( ) ( ) ( ) ( )2 пр пр пр отр отр отр, ε exp ω ε exp ω α ,E t E F i t E F i tε = + ϕ + + +ϕɺ
где ( )1 ,E t εɺ и ( )2 ,E t εɺ – сигналы первой и второй антенн соответственно ( t – время); прE ,
отрE – амплитуды напряженности электромагнитного поля, приходящего от НЛЦ и ее ан-
типода соответственно; ( )прεF , ( )отрεF – коэффициент усиления антенн в направлении
на НЛЦ ( )прε и ее антипод ( )отрε соответственно; α – взаимный фазовой сдвиг сигналов
НЛЦ и ее антипода, обусловленный их разносом по дальности; ( )пр пр2π λ sin ε ,ϕ =
( )отр отр2π λ sin εϕ = – фазовые сдвиги сигналов, обусловленные угловыми ошибками пе-
ленгации НЛЦ и ее антипода соответственно (λ – длина волны лоцирования).
На выходе идентичных по характеристикам приемных каналов с точностью до по-
стоянного коэффициента соответственно получим
( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )1 1 пр пр отр
2 2 пр пр пр отр отр
, ε exp ω ε exp ω α ;
, ε exp ω ε exp ω α ,
u t k E F i t aF i t
u t k E F i t aF i t
ε = + +
ε = + ϕ + + +ϕ
ɺ
ɺ
где 1 2, k k – коэффициенты передачи сигнала в каналах приемника РЛС; отр прa E E= .
На выходе фазового детектора имеем пеленгационную характеристику
( ) ( ) ( ) ( ) ( ){
( ) ( ) ( ) ( ) ( ) }
2 21 2 1 2 пр пр пр
2 2пр отр пр отр отр отр
ε Re , , exp π 2 ε sin
ε ε sin α sin α ε sin ,
S u t u t i k k E F
aF F a F
∗ = ε ε = ϕ +
+ ϕ − + ϕ + + ϕ
ɺ ɺ
(1)
где " "∗
– знак комплексного сопряжения.
Фазовый сдвиг α в реальных условиях быстро изменяется, поэтому можно считать
ошибки, порождаемые изменениями фазы колебания сигнала, полностью отфильтрован-
ными. Тогда (1) упрощается: ( ) ( ){ ( ) }2 2 2 21 2 пр пр пр отр отрε ε sin ε sin .S k k E F a F= ϕ + ϕ
Большой интерес представляет анализ угловой точности ∆ε фазово-фазовой РЛС
при измерении УМ НЛЦ, находящейся близко к равносигнальному направлению (РСН) в
вертикальной плоскости. При этом прε ε∆ = , ( ) ( )прε 0F F≈ , прsin ε ε≈ ∆ и
( ) ( ) ( ) ( ) ( ) ( )22 2 21 2 пр ф отр ф отрε 0 sin ε ε 0 sin sin ε .S k k E F kd a F F kd
= ∆ + (2)
где 2π λk = ; фd – база фазовой антенной системы; ( )0F – коэффициент усиления ан-
тенн в РСН.
Приравнивая (2) нулю, найдем условие пеленгации при наличии антипода НЛЦ
( ) ( ) ( ) ( )22ф отр ф отрsin ε ε 0 sin sin ε 0.kd a F F kd ∆ + =
При малых значениях ε∆ ( )ф фsin 2π ε λ 2π ε λd d∆ ≈ ∆ . Отсюда

48
( ) ( ) ( ) ( )22ф отр ф отрε ε 0 sin sin ε .a kd F F kd ∆ = (3)
Выражение (3) полностью совпадает с описанным в [2] выражением погрешности
определения УМ НЛЦ в фазовой суммарно-разностной РЛС по измеренному отрε . Это
объясняется тем, что при зеркальном отражении радиоволн от моря погрешность измере-
ния УМ НЛЦ зависит практически лишь от метода пеленгации (амплитудного или фазо-
вого), а не от типа дискриминатора.
В судовых и корабельных трехкоординатных РЛС для измерения высоты низколе-
тящей цели целесообразно применить антенны с двухкосекансным или симметричным
лучом. В первом случае коэффициент усиления антенны по мощности в РСН ( )20F =
( )2 20 0ε 1 cos εF= = , а погрешность пеленгации по УМ определяется выражением
( )
( )
( ) ( )
2 22
ф отр 3 0 отр 2 02ф отр 0
2
ф отр 2 0 отр2ф отр 0
tg εsin sin ε при ε ε ε ε ε ;
sin ε εε
sin sin ε при ε ε ε 0,cos ε ε
akd
kd
akd
kd
− ≤ ≤ −
+∆ =
− < ≤
+
(4)
где 0ε – угол подъема оси ДН над плоскостью горизонта; 1ε , 2ε , 3ε – углы, определяющие
форму ДН в вертикальной плоскости.
Из формулы (4) видно, что нелинейность характеристики направленности двухкосе-
кансного луча в области, близкой к РСН, вызывает дополнительную ошибку определения
УМ НЛЦ. Для уменьшения этой ошибки можно использовать симметричный луч, ДН ко-
торого в вертикальной плоскости по мощности определяется выражением ( )2εF =
( )20.5exp 2.8 ε ε = − ( 0.5ε – ширина ДН в вертикальной плоскости по половинной мощ-
ности). Тогда
( ) ( ) ( )2 2отр ф ф отрε ε sin sin εa F kd kd ∆ =
. (5)
Симметричный луч, с одной стороны, позволяет исключить указанную ошибку, но с
другой – не обеспечивает равномерную мощность сигналов, отраженных от одинаковых
точечных целей независимо от их удаления. Поэтому такой луч целесообразно применять
в тех случаях, когда МИ РЛС преимущественно предназначена для обнаружения НЛЦ и
определения их угловых координат.
При большом волнении моря при сопровождении НЛЦ появляются сильные знако-
переменные флуктуации ошибок по УМ, основная причина которых заключается в диф-
фузионном (а не зеркальном) характере отражений сигналов от моря [3]. Диффузия отра-
женных сигналов не только снижает угловую точность фазово-фазовой РЛС, но и увели-
чивает помеху при обнаружении НЛЦ и измерении ее дальности. Для широких в верти-
кальной плоскости и довольно узких в горизонтальной плоскости ДН антенны влиянием
диффузии по азимуту можно пренебречь, а влияние диффузии по УМ – оценивать по так
называемой блестящей поверхности или "лунной дорожке". Применяя четырехлучевую

49
модель отраженных сигналов [4] при количественной оценке точности рассматриваемой
РЛС по углу места, достаточно включить в выражения (3)–(5) комплексный коэффициент
отражения радиоволн от статистически шероховатой поверхности моря ( )отрρ ε .
Тогда отношение амплитуд a определится выражением
( ) ( )
( )
2 2 2 2отр ц a a пр пр отр
2 2 2ц a a пр пр отр
ρ ε exp 2 cos ε ρ ε
exp 2 cos ε ρ ε
i kh h h R
a
i kh h h R
+ + =
+ +
, (6)
где a ц, h h – высота антенны РЛС и высота полета НЛЦ соответственно; прR – дальность
цели по прямой траектории (см. рис. 1).
Когерентная и некогерентная компоненты комплексного коэффициента отражения влия-
ют на угловую точность МИ РЛС по-разному. Когерентная компонента, связанная со средним
значением амплитуды напряженности электромагнитного поля, отраженного взволнованной
поверхностью моря в зеркальном направлении, при заданных параметрах волнения имеет ста-
бильную во времени амплитуду и постоянный (по отношению к падающему полю) фазовый
сдвиг, поэтому именно ее воздействие в квазинепрерывных МИ РЛС оказывается основной
причиной систематической ошибки пеленгации. Амплитуда и фазовый сдвиг некогерентной
компоненты случайны, в силу чего может появляться флуктуационная ошибка пеленгации.
Предварительное накопление полезных сигналов в квазинепрерывных МИ РЛС ведет к ликви-
дации аномально больших ошибок, поэтому влиянием флуктуационной составляющей на точ-
ность пеленгации этих РЛС по сравнению к когерентной составляющей можно пренебречь.
Для когерентных РЛС с низким расположением антенны над морем коэффициент
отражения определяется выражением [4]
( ) ( ) ( )2 2 2 2 2 2отр 0 отр 0ρ ε ρ exp 8π σ sin ε λ ρ exp 8π κ ,z= − = − (7)
где 0ρ – коэффициент отражения Френеля; σz – среднеквадратичное отклонение ординат
волнового профиля; отрκ σ sin ε λz= .
В зависимости от вида поляризации (горизонтальной или вертикальной) сигналов
РЛС коэффициент отражения Френеля определяется выражениями:
2 20 отр д отр отр д отрρ sin ε ε cos ε sin ε ε cos ε
= − − + −
(8)
– для горизонтальной поляризации и
2 20 д отр д отр д отр д отрρ ε cos ε ε sin ε ε cos ε ε sin ε
= − − − +
(9)
– для вертикальной поляризации. Здесь дε 55 29.7i= + – относительная диэлектрическая
проницаемость морской воды.
Влияние состояния морской поверхности на точность определения УМ НЛЦ исследо-
валось математическим моделированием. Исходные данные для моделирования следую-
щие. Антенная система фазово-фазовой РЛС состоит из двух симметричных лучей с шири-

50
ной ДН в вертикальной плоскости 20° , a 10 м,h = ц 5 мh = . Среднеквадратичное отклоне-
ние высоты морских волны zσ , необходимое для описания морского волнения, определяет-
ся через среднюю высоту волн H или их высоту 3%-й обеспеченности 3%H по формуле
3%σ 2π 5.29z H H= = . (10)
Ошибки определения УМ НЛЦ в данной РЛС рассчитывались по формуле (5) с уче-
том (6)–(10) при двух и семи баллах морского волнения (рис. 2, мε ; R – расстояние до цели
по линии горизонта). Результаты моделирования показывают, что при усилении волнения
моря ошибка определения УМ НЛЦ уменьшается (так, значения мε при волнении 7 баллов
практически совпадают с прε ). Это объяс-
няется тем, что при сильном волнении коге-
рентная компонента, вызывающая система-
тическую ошибку пеленгации, менее устой-
чива и ее действие на угловую точность,
благодаря большому времени накопления
полезных сигналов в квазинепрерывных МИ
РЛС обзора, уменьшается. При сближении
НЛЦ с наблюдающей РЛС точность опреде-
ления УМ НЛЦ уменьшается, поскольку повышение угла скольжения усиливает уровень
сигналов антипода, образованных множеством отражателей взволнованного моря.
Следует отметить, что работа судовых МИ РЛС при усилении волнения моря все же
ухудшается, поскольку сильные помехи от взволнованной поверхности оказывают боль-
шое вредное действие на процесс обнаружения НЛЦ.
Проведенное исследование показывает, что при нахождении цели вблизи РСН нали-
чие сигнала-антипода может приводить к большой ошибке определения УМ НЛЦ. Для
уменьшения этой ошибки необходимо разрабатывать новые алгоритмы определения УМ
(высоты) целей с повышенной точностью.
Поскольку вероятности приема сигнала по прямому, переотраженному лучу или по обо-
им лучам неизвестны, то целесообразно использовать алгоритм коррекции результата измере-
ния угломестной координаты или высоты. Из рис. 1 видно, что значения дальности точечной
цели по прямой прR и переотраженной отрR траекториям определяются выражениями:
( ) ( )2 2пр а ц пр ц a ц a отр отрsin ε 2 cos 2ε sin ε ;R h h h h h h= − = + − (11)
( )отр а ц отрsin ε .R h h= + (12)
Для некоторого значения прR УМЦ при ц 0h = прε достигает максимального значения
( )max a прε arcsin .h R= (13)
Во всяком случае, неравенство пр max отрε ε ε≤ < выполняется, поэтому прε и отрε
можно различить, сравнивая их с рассчитанным значением maxε .
Радиолокатор, работающий в режиме СНП, может измерить УМ только целей, летящих
на высотах, при которых разность хода сигналов отрR∆ больше разрешающей способности
РЛС по дальности ΔR . При зеркальном отражении эта разность определяется выражением
, ε °…
– 2
– 4
– 6
0 5 10 15 , кмR
отрε , действительное значение
прε , действительное
значение
мε , волнение
2 балла
Рис. 2

51
( ) ( )отр ц a отр а ц прsin ε sin ε .R h h h h∆ = + − −
Если разрешающая способность рассмотренной РЛС по УМ намного меньше изме-
ренных значений УМ целей по прямой и по переотраженной траекториям (т. е. прΔε ε ,<<
отрΔε ε<< ), то для НЛЦ имеем ( )отр пр прsin ε sin ε Δε sin ε= + ≈ . Отсюда можно опреде-
лить минимальную высоту полета НЛЦ
( )ц min прΔ 2 sin ε .h R≥ (14)
С учетом того, что сигнал, принятый по прямой траектории, всегда доходит до РЛС
раньше, чем принятый по переотраженной траектории, при условии ц ц minh h< принятие
измеренного УМ за прε является более достоверным.
Таким образом, предлагаемый алгоритм определения УМ (высоты) НЛЦ при режиме
СНП включает следующие операции (рис. 3):
• По заранее известной высоте подъема
антенны ah и измеренным значениям
дальности измR вычисляется макси-
мально возможный угол места НЛЦ
maxε по формуле (13) и сравнивается
с измеренным значением УМЦ измε .
• При изм maxε ε≤ :
o принимается изм прε ε= , изм прR R= и
вычисляется цh по формуле (11);
o по известным значениям прΔ , εR по
формуле (14) вычисляется ц minh ;
o при ц ц minh h≥ цh и прε окончатель-
но принимаются для дальнейшего ис-
пользования. В противном случае
( )ц ц minh h< при необходимости
можно принять те же данные, но с до-
пущением больших ошибок опреде-
ления УМ или высоты НЛЦ.
• При изм maxε ε≥ :
o предварительно принимаются изм отрε ε= , отр измR R= и по формуле (12) вычисляется цh ;
o по полученным значениям maxS , цh и аh рассчитывается прε по формуле
( ) ( ){ }2 2пр а ц отр ц а а ц отрε arcsin sinε 2 cos 2εh h h h h h = − + − ; (15)
Начало
Определение maxε (13) Ввод а изм, , h R R∆
изм maxε ≤ ε
изм отр изм отр, R Rε = ε =
Определение цh (12)
Определение прε (15)
Вывод ц пр, h ε
Конец
изм пр изм пр, R Rε = ε =
Определение цh (11)
Определение ц minh (14)
ц ц minh h≥
Да
Да
Нет
Нет
Рис. 3

52
o по формуле (14) определяется ц minh
и проверяется условие ц ц minh h≥ для
окончательного принятия значения
прε и цh .
На рис. 4 представлены оценки вы-
соты НЛЦ в зависимости от дальности
(результат моделирования). Исходные
данные: время накопления полезных сиг-
налов н 24 мсT = ; число импульсов в
пачке 50n = ; a ц10 м; 5 мh h= = ; среднеквадратичные ошибки определения фазы сигна-
лов фσ 0.01= ° и оценки дистанции дσ 2 30 мD= ∆ = .
Как показано на рис. 4, при удалении НЛЦ от наблюдающей РЛС точность измерения
УМ НЛЦ уменьшается, так как уменьшение угла скольжения и разности хода между пря-
мым и переотраженным сигналами воздействуют на моноимпульсный пеленгатор.
По результатам проведенного анализа можно сделать следующие выводы.
При сопровождении низколетящих над морем целей основной причиной возникно-
вения больших систематических ошибок по углу места является когерентная компонента
мешающего сигнала-антипода, увеличивающаяся при уменьшении волнения моря. При
сильном волнении влияние этих ошибок снижается, но работа морских МИ РЛС все же
ухудшается из-за трудности обнаружения НЛЦ.
Предложенный алгоритм коррекции оценок позволяет повысить точность оценки
УМ (высоты) НЛЦ при работе фазово-фазовых РЛС в режиме СНП.
СПИСОК ЛИТЕРАТУРЫ
1. Авласенок А. В., Григорян Д. С., Деркач С. Н. Фазовой пеленгатор с полуволновой базой для обзор-
ной моноимпульсной РЛС // Изв. вузов. Радиоэлектроника. 2003. № 4. С. 3–10.
2. Леонов А. И., Фомичев К. И. Импульсная радиолокация. М.: Радио и связь, 1984 312 с.
3. Мизрохи В. Я. Определение дальности разрешения радиолокационной головкой самонаведения низ-
колетящей над морем цели // Радиотехника. 2001. № 12. С. 79–85.
4. Леонтьев В. В. Характеристики радиолокационного рассеяния морских объектов: Учеб. пособие.
СПб.: Изд-во СПбГЭТУ "ЛЭТИ", 1999. 160 с.
Nguyen Thanh Hung
THE ANGULAR PRECISION OF THE PHASE-COMPARISON MONOPULSE RADARS IN THE TRACKING-WHILE-SCANING REGIME OF THE LOW-ALTITUDE TARGETS
Theoretically and by the method of mathematical modeling it was made analysis of the in-fluencing of the sea-clutter on the angular errors of the phase-comparison monopulse radars. To increase the angular precision of the low-altitude targets the using of the elevation correct-ing algorithm was offered. The estimation of the synthesized algorithm is given.
Quasi-continuous monopulse radar, low-altitude target, tracking-while scanning, angular precision
Статья поступила в редакцию 5 ноября 2004 г.
Рис. 4
0 2 4 6 , кмR8
4.4
4.8
5.2
5.6
ц , мh

53
УДК 621.396.67.01
Буй Нгок Ми, А. В. Мамруков
МОДЕЛИРОВАНИЕ ИЗМЕНЕНИЯ ПАРАМЕТРОВ
СВЧ-АНТЕНН, РАСПОЛОЖЕННЫХ ВБЛИЗИ КОЛЕСА
ПАРОВОЙ ТУРБИНЫ
Представлены результаты моделирования характеристик антенн, расположен-ных вблизи лопаток рабочего колеса паровой турбины, для оценки явления затягивания частоты СВЧ-автогенератора, работающего на эту антенну. Показано, что для полу-чения полной информации о радиальных и осевых биениях лопаток целесообразно ис-пользовать двухчастотные режимы работы генератора и в качестве стабилизирую-щего частоту элемента применять резонатор антенны.
Вибрации лопаток, антенна Вивальди, пакет ANSOFT HFSS, коэффициент отражения
Точные измерения параметров вибраций лопаток рабочих колес паровых турбин
представляют сложную задачу, успешно решить которую можно радиотехническими или
оптическими методами. Традиционно используемые индукционные датчики и датчики на
основе эффекта Холла не обеспечивают требуемой точности измерений, особенно для ис-
пытательных стендов.
Для определения параметров вибраций предлагается использовать СВЧ-автогенера-
торы, нагруженные на антенны-излучатели, так что изменение условий работы антенны за
счет прохождения мимо излучателя лопатки турбинного колеса будет приводить к изме-
нению частоты и амплитуды сигнала автогенератора [см. лит]. Дальнейшая обработка вре-
менных зависимостей явления затягивания автогенератора позволяет определить парамет-
ры вибраций лопаток. При этом излучающему элементу приходится работать в сложной
обстановке, как с точки зрения окружения движущимися и неподвижными металлически-
ми поверхностями, так и из-за агрессивности среды.
Для оценки возможности применения такого метода моделировались условия рабо-
ты комплекса "СВЧ-антенна – автогенератор" в кожухе турбины вблизи ее рабочего коле-
са. Схема моделирования показана на рис. 1, где 1 – движущаяся лопатка колеса паровой
турбины; 2 – направляющие пар решетки в
кожухе турбины; 3 – стенка кожуха турби-
ны; 4 – антенна.
На начальном этапе моделирования
для поиска общих закономерностей и оп-
тимальных рабочих частот датчиков ис-
пользовалась не резонансная, а широкопо-
лосная антенна Вивальди. Моделирование
выполнялось с помощью пакета ANSOFT
HFSS. Результаты моделирования пред-
ставлены на рис. 2–4.
На первом этапе было выполнено мо-
делирование, позволившее оценить влияние
12
3
4
x
z y
Рис. 1
© Буй Нгок Ми, А. В. Мамруков, 2004

54
на характеристики антенны расстояния от плоскости лопаток до ее раскрыва. Полученные
результаты позволяют найти оптимальное положение радиочастотных датчиков в кожухе
рабочего колеса турбины, а малые смещения относительно этого положения имитируют
осевые биения турбины. На рис. 2 показаны полученные в результате моделирования зави-
симости модуля и фазы коэффициента отражения 11S на входном порте антенны от частоты
для трех различных положений лопатки относительно антенны (сдвиг по оси x турбины на
рис. 1). На рис. 2 кривые 1 соответствуют центральному положению лопатки, кривые 2 –
сдвигу лопатки вдоль оси на 15 мм, а кривые 3 – сдвигу на –15 мм.
На рис. 3 приведены результаты моделирования изменения характеристик антенны
при вращении лопаток турбинного колеса. Вращение имитировалось сдвигом лопаток
вдоль образующей кожуха турбины (оси y на рис. 1). На рис. 3 кривые 1 соответствуют
центральному положению лопаток, кривые 2 – сдвигу лопаток вдоль образующей кожуха
на 15 мм, а кривые 3 – сдвигу на –15 мм.
0
11S
0.1
1 2 , ГГцf3
0.3
0.2
0.4
1
2
3
0
11arg , S °…
– 100
1 2 , ГГцf3
0
– 50
50 2
1
3
Рис. 2
Рис. 3
0
11S
0.1
1 2 , ГГцf3
0.3
0.2
0.4
1
3
2
0
11arg , S °…
– 80
1 2 , ГГцf3
0
– 40
2
1
3
Рис. 4
0
11S
0.1
1 2 , ГГцf3
0.3
0.2
0.4 1
3
2 0.5
0
11arg , S °…
– 100
1 2 , ГГцf3
0
– 50
50
2
1
– 150
3

55
Изменение модуля и фазы входного коэффициента отражения антенны при радиаль-
ных биениях лопатки имитировалось смещением лопатки вдоль оси z. Результаты моде-
лирования частично представлены на рис. 4. Здесь кривые 1 соответствуют центральному
положению лопатки, кривые 2 – смещению лопатки вдоль оси z на 15 мм, а кривые 3 –
смещению на –15 мм.
Как следует из анализа приведенных результатов, для получения полной информа-
ции о радиальных и осевых биениях лопаток целесообразно использовать два измеритель-
ных автогенератора, работающих на частотах 2.4 и 4 ГГц. Результаты моделирования
также показывают, что использование широкополосных антенн в измерительных автоге-
нераторах нецелесообразно. Более разумно применять резонансные узкополосные антен-
ны, излучающий резонатор которых является одновременно элементом, задающим часто-
ту автогенератора. В качестве таких антенн можно рекомендовать печатные Patch-антен-
ны или антенны на основе диэлектрических резонаторов.
СПИСОК ЛИТЕРАТУРЫ
Арш Э. И. Автогенераторные методы и средства измерений. М.: Машиностроение, 1979. 251 с.
Bui Ngoc My, A. V. Mamroukov
SIMULATION CHANGES OF PARAMETERS OF SHF ANTENAS LOCATED NEAR TO A WHEEL OF THE STEEM TURBINES
Results of antennas characteristic modeling, located close to the shovel of the driving wheel of the steam turbine, and the frequency tightening phenomenon of the super high fre-quency of the self-oscillator, working on this antenna, are presented.
Vibration shovels, antenna Vivaldi, software ANSOFT HFSS, factor of reflection
Статья поступила в редакцию 25 октября 2004 г.
УДК 621.396.96:629.783; 529.735.083
С. В. Толоконников, А. А. Рогова, С. П. Соболев
СВОЙСТВА АЛГОРИТМА АВТОНОМНОГО КОНТРОЛЯ
ЦЕЛОСТНОСТИ СПУТНИКОВОЙ НАВИГАЦИОННОЙ
ИНФОРМАЦИИ ДЛЯ БОРТОВОГО ОБОРУДОВАНИЯ
НАВИГАЦИИ И ПОСАДКИ
Рассматривается алгоритм автономного контроля целостности, основанный на использовании данных, полученных в результате решения навигационной задачи мето-дом наименьших квадратов в аппаратуре потребителей спутниковых навигационных систем. Приводятся результаты моделирования, выполненного с использованием на-турных данных, полученных от нескольких навигационных спутников.
RAIM, СНС, GPS, GLONASS, безопасность полетов, контроль целостности, моделирование, диагностика
Главное свойство навигационной системы – способность непрерывно определять коор-
динаты объекта с заданной точностью. Поэтому одним из основных и сложно реализуемых
© С. В. Толоконников, А. А. Рогова, С. П. Соболев, 2004

56
требований к системе контроля и диагностики навигационной системы является своевремен-
ное выявление ситуации, в которой происходит потеря заданной точности местоопределения.
Во время эксплуатации спутниковой навигационной системы (СНС) могут возникать
дефекты измерения, вызванные отказами спутников, аномальным искривлением пути рас-
пространения радиоволн, искажением эфемеридной информации, помехами при переот-
ражении сигнала от местных предметов и другими причинами∗. Такие дефекты могут
привести к погрешностям определения координат объекта, превышающим тактико-техни-
ческие характеристики системы. Для оценки состояния СНС, в том числе для контроля и
диагностики, используется понятие целостности.
Под контролем целостности понимают способность системы обеспечить своевре-
менное предупреждение о том, что она не в состоянии удовлетворить требованиям к за-
данной точности. Поэтому одна из задач поддержания целостности в условиях информа-
ционной избыточности и при наличии неконтролируемого отказа одного из спутников∗∗
заключается в выявлении неисправного спутника и исключении его данных из алгоритмов
вычисления навигационных параметров.
В связи с тем, что в настоящее время орбитальная группировка СНС ГЛОНАСС
(глобальная навигационная спутниковая система, разработанная в СССР) практически не
развернута, особый интерес для потребителей представляет система GPS (Global Position-
ing System – глобальная система местоопределения, разработанная в США).
Система GPS была создана в 80-х гг. по заказу министерства обороны США (военно-
воздушных сил) и находится под его управлением. Сигналы GPS стандартного режима
предоставляются без ограничения для гражданского, коммерческого и научного использо-
вания [2].
В связи с возможными катастрофическими последствиями при использовании сис-
темы GPS для навигации морских и воздушных судов исследователи в течение последних
15 лет уделяли значительное внимание проблеме целостности GPS, поскольку данная сис-
тема стремится занять центральное место при обеспечении навигации. Усилия были на-
правлены как на усовершенствование системы управления GPS, так и на проектирование
независимых средств определения целостности GPS с помощью аппаратуры потребите-
лей, т. е. на реализацию концепции, известной как автономный мониторинг целостности
приемника (Receiver Autonomous Integrity Monitoring – RAIМ).
В данной статье исследуется влияние ошибок измерений на точностные характери-
стики бортового оборудования спутниковой навигации (БОСН) в интересах задач контро-
ля и диагностики.
Основные понятия и определения. RAIM – автономный контроль целостности в
аппаратуре потребителей (приемниках СНС) – это метод, посредством которого приемник
определяет целостность навигационных сигналов без ссылки на показания датчиков и
всех других систем контроля целостности, кроме самого приемника. Различные аспекты
контроля целостности спутниковой информации рассматриваются в работе [3].
Чаще всего целостность контролируется проверкой состава избыточных измерений
псевдодальностей [4].
∗ Результаты наблюдения за СНС в различных условиях приведены в монографии [1]. ∗∗ Одновременный отказ двух или более спутников обычно не рассматривается ввиду крайне малой вероят-
ности этого события.

57
Краткая характеристика RAIM устанавливает, прежде всего, что единственной ин-
формацией, на основе которой принимается решение о целостности, является состав из-
быточных измерений псевдодальностей ( )пдR , полученных приемником для некоторой
пространственно-временной точки. Задачей RAIM является определение целостности это-
го состава измерений, т. е. обеспечение возможности решения навигационной задачи с
требуемой точностью и надежностью по результатам полученных измерений.
Под дефектом измерения понимается дополнительная ошибка в одном из измерений
пдR , которая может нарушить целостность общего состава измерений. Заметим, что зада-
чей RAIM является не только и не столько обнаружение неисправности спутника, сколько
обнаружение частных дефектов измерения, которые в разных ситуациях могут принадле-
жать разным спутникам.
Алгоритм RAIM с порогом сигнализации, определяемым характеристиками нор-
мально функционирующей системы, обеспечивает предупреждение при превышении за-
данного значения радиальной ошибки.
Метод наименьших квадратов невязок. Для практической реализации RAIM было
предложено несколько различных методов. В статье Р. Брауна [5] были рассмотрены три ме-
тода RAIM: метод сравнения дальностей, метод паритета и метод наименьших квадратов невя-
зок (Least Squares Residuals Method – LSRM). В основе всех трех методов RAIM лежит оценка
остаточных разностей между измеренными псевдодальностями и найденными в процессе ре-
шения навигационной задачи прогнозируемыми расстояниями до навигационных спутников.
Разница заключается в подходе к выбору параметров и критериев оценки целостности.
Проведенный Р. Брауном теоретический анализ различных параметров оценки пока-
зал, что разница в структуре параметров оценки носит чисто внешний характер, и некото-
рыми преобразованиями все предложенные параметры оценки могут быть сведены к не-
которому общему виду, которым является сумма квадратов невязок (Sum of Squares of Er-
rors – SSE). Из этого сделан вывод об эквивалентности рассмотренных методов RAIM и
равной их эффективности.
В этом случае на выбор метода и алгоритма RAIM могут влиять только такие факто-
ры, как простота реализации алгоритма и его взаимосвязь с существующими алгоритмами
работы приемника сигналов СНС. По этим признакам большинство авторов [5]–[9] отда-
ют предпочтение алгоритму LSRM.
К числу достоинств LSRM относят следующие:
1. SSE является неотрицательной скалярной величиной. Скалярность SSE приводит
к простому правилу решения.
2. Алгоритм LSRM непосредственно связан с алгоритмом решения навигационной
задачи по методу наименьших квадратов (МНК), который используется в современных
приемниках сигналов СНС. Усложнение работы процессора приемника в этом случае не
требует больших затрат вычислительных ресурсов.
3. Возможность использования LSRM для решения дополнительной задачи RAIM –
изоляции дефекта (при достаточной избыточности измерений 6n ≥ ).
Задача изоляции дефекта решается проверкой целостности всех n укороченных со-
ставов измерений, состоящих из ( )1n− элемента и полученных последовательным по по-
рядку номеров исключением из общего состава одного из измерений. Удачное решение ука-

58
занной задачи обеспечивает непрерывность нахождения координат потребителя. Однако
изоляция дефекта требует существенного увеличения вычислительных ресурсов процессора
и затрат времени для перебора всех n вариантов решения навигационной задачи.
Теоретическое обоснование LSRM и статистическая проверка основных результатов
анализа представлена в [8]. Краткое описание LSRM содержится также в [5], [7].
В результате решения навигационной задачи методом LSRM получается решение
( )т тLS€
−=
1x G G G y , где LS€x – вектор поправок к номинальным (априорно заданным) зна-
чениям параметров (искомых координат) размерностью [ ]4 1× ; G – матрица коэффициен-
тов линеаризованных уравнений (матрица наблюдений, матрица направляющих косину-
сов) размерностью [ ]4n× ; "т"
– символ транспонирования; y – вектор разностей между
измеренными и прогнозируемыми значениями псевдодальностей размерностью [ ]1n× .
Из уравнения LSˆ ˆ= +y Gx ε может быть найден вектор невязок LSˆ ˆ= − =ε y Gx
( ) 1т т
−= −y G G G G y . Значение суммы квадратов невязок
т€ €SSE = ε ε . (1)
Выбор вектора невязок по минимуму SSE определяет принцип решения избыточной
системы уравнений по методу наименьших квадратов.
Б. Паркинсоном и П. Аксельрадом показано [8], что нормированная величина 2SSE σ
подчиняется распределению χ-квадрат с числом степеней свободы ( )4n− , если ошибки из-
мерений распределены по нормальному закону с нулевым средним, а дисперсия 2σ ошибок
всех полученных в данный момент измерений одинакова. Это логически следует из опреде-
ления указанного распределения [10]. При этом SSE относительно нечувствительна к геомет-
рическому расположению спутников в зоне обзора.
Если же в каком-либо измерении появляется дефект, закон распределения и дисперсия
ошибки в этом измерении изменяются, а значение SSE, определенное по (1), будет подчи-
няться смещенному (нецентральному) распределению χ-квадрат. В этом случае влияние гео-
метрической ситуации на величину смещения будет более сильным, но с увеличением дефек-
та смещение распределения всегда будет возрастать. Указанное обстоятельство обосновывает
пригодность SSE для оценки целостности сигналов СНС. Однако мерой оценки должен быть
параметр, зависящий от избыточности системы уравнений – числа степеней свободы ( )4n−
в распределении χ-квадрат. Таким параметром является значение ( )ε SSE 4r n= − , а крите-
рием оценки целостности – результат сравнения rε с порогом trε : при tr rε ε≤ состав изме-
рений полагается целостным, а при tr rε ε> регистрируется дефект.
Значения порога trε определены в [5] и сведены в таблицу.
Моделирование решения навигационной задачи и проверка работы алгоритма
RAIM. Экспериментальные данные для моделирования – измеренные псевдодальности и
Число спутников в зоне обзора n 5 6 7 8 9≥
Число степеней свободы распределения χ -квадрат ( )4n − 1 2 3 4 5≥
Значение порога ,trε м 132 102 90 82 77

59
координаты спутников в прямоугольной системе координат с началом в центре Земли –
были получены в результате сеанса измерений. При проведении эксперимента в зоне ви-
димости находилось 10 спутников. Измерения проводились ежесекундно в течение 88 с.
Моделирование производилось в программной среде MatLab 6.5. При моделирова-
нии навигационная задача решалась методом наименьших квадратов.
При исследовании в измерение псевдодальности одного из спутников вносился де-
фект v . Для каждого конкретного спутника были получены различные ошибки местооп-
ределения и различные значения параметра rε . Ошибка местоопределения вычислялась на
основании измеренных координат. Результаты моделирования приведены на рис. 1–4∗.
Анализ представленных зависимостей показывает:
• зависимости параметра rε от величины дефекта v (рис. 1), радиальной ошибки местооп-
ределения R от величины дефекта v (рис. 2) и от rε (рис. 3) практически линейны;
• порог trε для 10 спутников, равный 77 м (см. таблицу) позволяет выявить радиальную
ошибку местоопределения ,R большую, чем 300 м (рис. 3).
По рис. 4, на котором представлены результаты измерений ( )R rε в течение всего се-
анса (88 с) для всех спутников созвездия, можно сделать вывод, что параметр rε и ошибка
местоопределения R мало меняются с течением времени: это следует из того, что пучок
прямых для каждого спутника узок, т. е. ошибка изменяется незначительно.
Зная допустимую радиальную ошибку местоопределения R , по рис. 3 можно опреде-
лить необходимое значение порога trε для данной геометрической ситуации. Например,
∗ Каждая линия соответствует одному спутнику, в псевдодальность которого вносится дефект.
0
100
, мrε
, мv
200
300
250 500 750 0
250
, мR
, мv
500
750
250 500 750
Рис. 1 Рис. 2
Рис. 3 Рис. 4
, мrε0
250
, мR
500
750
100 200 300 0
250
, мR
500
750
100 200 300 , мrε

60
при максимально допустимой ошибке местоопределения 555 м (применяется в авиации при
выполнении "неточного" захода на посадку) порог необходимо установить равным 150 м.
На основании изложенного можно заключить:
1. Все предложенные параметры могут быть сведены к общему виду, которым является
параметр SSE, поэтому рассмотренные методы RAIM эквивалентны и равно эффективны.
2. Зависимости параметра rε от величины дефекта, радиальной ошибки местоопре-
деления от величины дефекта и радиальной ошибки местоопределения от rε практически
линейны. При внесении дефектов в данные от различных спутников изменяются наклоны
прямых, определяющих указанные зависимости. Причина этого в расположении спутни-
ков в пространстве, которое влияет на точность определения координат.
3. При использованной для получения экспериментальных данных геометрической
конфигурации набора спутников в данной точке пространства максимальная ошибка ме-
стоопределения при внесении в псевдодальность наименее благоприятно расположенного
спутника дефекта величиной 1 000 м достигает 910 м.
4. Параметр rε и ошибка местоопределения при проведении эксперимента практи-
чески не менялись с течением времени.
Полученные результаты показывают целесообразность использования алгоритма
RAIM для целей контроля и диагностики в спутниковых навигационных системах.
СПИСОК ЛИТЕРАТУРЫ
1. Соловьев Ю. А. Спутниковая навигация и ее приложения. М.: Эко-Трендз, 2003. 326 с.
2. Сетевые спутниковые радионавигационные системы / В. С. Шебшаевич, П. П. Дмитриев, Н. В. Иван-
цевич и др. М.: Радио и связь, 1993. 408 с.
3. Brown A. K. Civil Aviation Integrity Requirements for the Global Positioning System // Navigation. 1988.
Vol. 35, № 1. P. 23–40.
4. Minimum Operational Performance Standards For Global Positioning System/Wide Area Augmentation Sys-
tem Airborne Equipment // Document RTCA/DO 229, prepared by SC-159. Washington: RTCA, 1996. 280 p. 5. Brown R. G. A Baseline GPS RAIM Scheme and a Note on the Equivalence of Three RAIM Methods
// Navigation. 1992. Vol. 39, № 3. P. 301–316.
6. Chin G. Y., Kraemer J. H., Brown R. G. GPS RAIM: Screening Out Bad Geometries Under Worst-Case
Bias Conditions // Navigation. 1992. Vol. 39, № 4. P. 407–427.
7. Kozel B. J., Cardoza A. Evalution of GPS Positioning Service Autonomous Integrity Monitoring Perform-
ance for Military Applications // Proc. of the 1996 IEEE Position Location and Navigation Symposium, Atlanta,
Georgia, 1996. http://www.tridentresearch.com/pubs/papr2.pdf
8. Parkinson B. W. Axelrad P. Autonomous GPS Integrity Monitoring Using the Pseudorange Residual
// Navigation. 1988. Vol. 35, № 2. P. 255–271.
9. Van Dyke K. L. RAIM Availability for Supplemental GPS Navigation // Navigation. 1992. Vol. 39, № 4.
P. 429–443.
10. Справочник по вероятностным расчетам. М.: Воениздат, 1970. 436 с.
S. V. Tolokonnikov, A. A. Rogova, S. P. Sobolev
PROPERTIES OF THE AUTONOMOUS INTEGRITY MONITORING OF GPS NAVIGATION INFORMATION FOR AIRBORNE EQUIPMENT OF NAVIGATION AND APPROACH
Algorithm of autonomous integrity monitoring is described. Algorithm bases on data, taken as a result of navigation task solving with the aid of least square technique. Modeling results are given. Modeling was made using in-SITU measurements, taken from several navigation satellites.
RAIM, SNS, GPS, GLONASS, flight safety, integrity control, modeling, diagnostics
Статья поступила в редакцию 1 октября 2004 г.