Embed Size (px)
DESCRIPTION
運動控制概念 - 期末報告. 姓名 : 蔡志宏. 班級 : 控晶四乙. 指導老師 : 王明賢 老師. 參考資料 : http://www.ni.com/white-paper/3367/zht#toc1. 目錄. 運動控制系統的元件 設定、原型製作,與開發軟體 運動控制器 移動類型 馬達放大器與驅動 馬達與機器元素 反饋 (Feedback) 裝置與運動 I/O. 運動控制系統的元件. 下圖即顯示運動控制系統的不同元件。. 圖 1. 運動控制器為運動控制系統的心臟。. 運動控制系統的元件. - PowerPoint PPT Presentation
Citation preview

運動控制概念運動控制概念 -- 期末報期末報告告
姓名 :蔡志宏班級 :控晶四乙指導老師 :王明賢 老師
參考資料 :http://www.ni.com/white-paper/3367/zht#toc1

目錄目錄
運動控制系統的元件運動控制系統的元件 設定、原型製作,與開發軟體設定、原型製作,與開發軟體 運動控制器運動控制器 移動類型移動類型 馬達放大器與驅動馬達放大器與驅動 馬達與機器元素馬達與機器元素 反饋 反饋 (Feedback) (Feedback) 裝置與運動 裝置與運動 I/OI/O

運動控制系統的元件運動控制系統的元件 下圖即顯示運動控制系統的不同元件。下圖即顯示運動控制系統的不同元件。
圖 1. 運動控制器為運動控制系統的心臟。
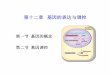
運動控制系統的元件運動控制系統的元件 應用軟體應用軟體 – – 應用軟體可設定目標位置與運動控制軌跡 應用軟體可設定目標位置與運動控制軌跡 (Profile)(Profile) 。。 運動控制器運動控制器 – 運動控制器如同系統的大腦,可管理目標位置與運 – 運動控制器如同系統的大腦,可管理目標位置與運
動軌跡、建立馬達所應行進的軌道、針對伺服馬達輸出 動軌跡、建立馬達所應行進的軌道、針對伺服馬達輸出 ±10 V ±10 V 訊號,或針對步進馬達輸出步進與方向脈波。訊號,或針對步進馬達輸出步進與方向脈波。
放大器或驅動放大器或驅動 – 放大器 – 放大器 (( 亦稱為驅動亦稱為驅動 ) ) 可接收控制器的指令,並可接收控制器的指令,並產生所需的電流以轉動馬達。產生所需的電流以轉動馬達。
馬達馬達 – 馬達將電能轉換為機械能,產生足夠力矩將馬達推送至所 – 馬達將電能轉換為機械能,產生足夠力矩將馬達推送至所需的位置。需的位置。
機器要素機器要素 – 馬達可為某些機器提供力矩。其中包含滾珠滑組 – 馬達可為某些機器提供力矩。其中包含滾珠滑組 (Li(Linear slide)near slide) 、機器手臂,與特殊致動器。、機器手臂,與特殊致動器。
反饋裝置或位置感測器反饋裝置或位置感測器 – 位置反饋 – 位置反饋 (Feedback) (Feedback) 裝置並非所有裝置並非所有運動控制應用所必須 運動控制應用所必須 (( 如控制步進馬達如控制步進馬達 )) ,卻為伺服馬達所必要。,卻為伺服馬達所必要。反饋裝置一般為相位差編碼器 反饋裝置一般為相位差編碼器 ((Quadrature encoder)encoder) ,可感測,可感測馬達位置並將結果回報予控制器,以關閉運動控制器的迴路。馬達位置並將結果回報予控制器,以關閉運動控制器的迴路。
設定、原型製作,與開發軟體設定、原型製作,與開發軟體
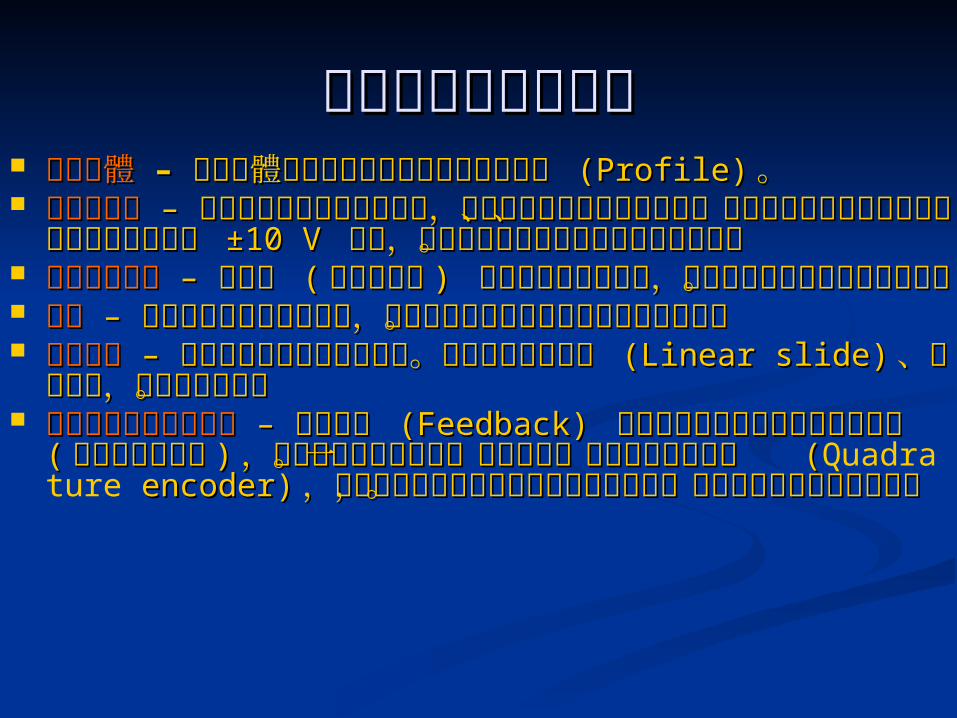
應用軟體主要可分為 應用軟體主要可分為 3 3 類:設定、原型製類:設定、原型製作,與應用開發環境 作,與應用開發環境 (ADE)(ADE) 。下圖則表示。下圖則表示運動控制系統的程式設計過程,還有與該運動控制系統的程式設計過程,還有與該程序相對應的 程序相對應的 NI NI 產品:產品:
上圖 . 運動控制系統開發過程

設定、原型製作,與開發軟體設定、原型製作,與開發軟體
設定設定
首先必須設定系統。首先必須設定系統。 NI NI 的 的 MeasuremenMeasurement & Automation Explorer (MAX) t & Automation Explorer (MAX) 即為互即為互動式工具,可設定運動控制與其他所有的 動式工具,可設定運動控制與其他所有的 NI NI 硬體。針對運動控制,硬體。針對運動控制, MAX MAX 提供互動提供互動式的測試與調整面板,可於程式設計之前,式的測試與調整面板,可於程式設計之前,協助使用者了解系統功能。協助使用者了解系統功能。
設定、原型製作,與開發軟體設定、原型製作,與開發軟體 原型製作原型製作
當系統設定完畢,則可開始製作應用原型並進行開當系統設定完畢,則可開始製作應用原型並進行開發。在此階段中,必須建立運動控制軌跡 發。在此階段中,必須建立運動控制軌跡 (Profile) (Profile) 並於系統中進行測試,以確保設定檔符合自己的需並於系統中進行測試,以確保設定檔符合自己的需求。針對原型製作,求。針對原型製作, NI NI 則提供 則提供 NI NI 運動小幫手 運動小幫手 (M(Motion Assistant)otion Assistant) 。。 NI NI 運動小幫手為互動式工具,運動小幫手為互動式工具,僅需滑鼠點選即可設定相關動作,並根據所設定的僅需滑鼠點選即可設定相關動作,並根據所設定的動作產生 動作產生 NI LabVIEW NI LabVIEW 程式碼。程式碼。

設定、原型製作,與開發軟體設定、原型製作,與開發軟體 NI NI 運動小幫手的主要優點,在於可設定與可程式化運動小幫手的主要優點,在於可設定與可程式化
環境中的差異。在可設定的環境中,不需程式設計即環境中的差異。在可設定的環境中,不需程式設計即可進行開發作業。使用者可將 可進行開發作業。使用者可將 NI NI 運動小幫手中的作運動小幫手中的作業,當成預先撰寫的程式碼區塊,並僅需將之設定以業,當成預先撰寫的程式碼區塊,並僅需將之設定以符合自己的需要。而就可程式化環境來說,使用者必符合自己的需要。而就可程式化環境來說,使用者必須使用如 須使用如 LabVIEWLabVIEW 、、 CC ,或 ,或 Visual Basic Visual Basic 的標準的標準程式設計語言,以完成自己的作業。然而,許多可設程式設計語言,以完成自己的作業。然而,許多可設定環境的功能往往不甚完備,或較無法整合運動應用定環境的功能往往不甚完備,或較無法整合運動應用以外的 以外的 I/OI/O。。 NI NI 運動小幫手則提供所有可設定系統運動小幫手則提供所有可設定系統的功能,還有 的功能,還有 LabVIEW LabVIEW 程式碼產生功能,以銜接可程式碼產生功能,以銜接可程式化環境與可設定環境。程式化環境與可設定環境。

設定、原型製作,與開發軟體設定、原型製作,與開發軟體
上圖 . NI 運動小幫手可迅速製作原型,並將專案轉換為 LabVIEW VI 或 C 程式碼,以進一步開發之。

運動控制器運動控制器
運動控制器即為運動控制系統的大腦,並運動控制器即為運動控制系統的大腦,並負責計算所需的移動軌道。由於此作業極負責計算所需的移動軌道。由於此作業極為重要,因此往往於機板上的數位訊號處為重要,因此往往於機板上的數位訊號處理器 理器 (DSP) (DSP) 執行,以避免主機電腦產生干執行,以避免主機電腦產生干擾 擾 (( 應該沒有人喜歡運動作業因防毒軟體應該沒有人喜歡運動作業因防毒軟體而中斷而中斷 )) 。運動控制器將使用自己所計算的。運動控制器將使用自己所計算的軌道,再決定合適的轉矩指令,並將之傳軌道,再決定合適的轉矩指令,並將之傳送至馬達放大器以產生運動。送至馬達放大器以產生運動。

運動控制器運動控制器 計算軌道計算軌道
運動軌道,代表運動控制器的機板控制作業,或輸出至驅運動軌道,代表運動控制器的機板控制作業,或輸出至驅動動 // 放大器的指令訊號,接著依循軌跡造成馬達放大器的指令訊號,接著依循軌跡造成馬達 // 運動的運動的行動。一般運動控制器均根據程式的參數值,以計算運動行動。一般運動控制器均根據程式的參數值,以計算運動軌跡的軌道區段 軌跡的軌道區段 (Trajectory segment)(Trajectory segment) 。運動控制器則。運動控制器則使用所需的目標位置、最大目標速度,與使用者所提供的使用所需的目標位置、最大目標速度,與使用者所提供的加速度值,以決定要於 加速度值,以決定要於 3 3 項主要移動區段 項主要移動區段 ((加速度、等加速度、等速度,與減速度速度,與減速度 ) ) 所耗費的時間。所耗費的時間。針對一般梯形軌跡的加速度區段,將根據停止位置或先前針對一般梯形軌跡的加速度區段,將根據停止位置或先前的移動開始運動作業,並跟著指定的加速坡道 的移動開始運動作業,並跟著指定的加速坡道 (Accelerat(Acceleration ramp) ion ramp) 動作,直到速度達到移動作業的目標速度。動作,直到速度達到移動作業的目標速度。

運動控制器運動控制器
圖 . 常見的梯形速度軌跡
運動控制器運動控制器
運動作業可依目標速度持續所指定的時間,直到運動作業可依目標速度持續所指定的時間,直到控制器決定開始減速度區段,並讓運動停止於所控制器決定開始減速度區段,並讓運動停止於所需的目標位置。需的目標位置。
若運動作業極短,可於完成加速度之前即達到減若運動作業極短,可於完成加速度之前即達到減速度開始點,則軌跡將接著呈現三角形而非梯形,速度開始點,則軌跡將接著呈現三角形而非梯形,且所達的實際速度可能低於所設定的目標速度。且所達的實際速度可能低於所設定的目標速度。S S 曲線 曲線 (S-curve) (S-curve) 加速度加速度 //減速度為基本的梯形減速度為基本的梯形軌道強化,即是針對加速度與減速度的坡道,將軌道強化,即是針對加速度與減速度的坡道,將之修改為非線性的曲線軌跡。此坡道外觀的微調之修改為非線性的曲線軌跡。此坡道外觀的微調控制功能,可針對慣性、摩擦力、馬達動態,與控制功能,可針對慣性、摩擦力、馬達動態,與其他機器運動系統的限制,依需要而調整運動軌其他機器運動系統的限制,依需要而調整運動軌道效能。道效能。

運動控制器運動控制器 選擇正確的運動控制器選擇正確的運動控制器
NI NI 提供 提供 33款 款 DSP DSP 架構的運動控制器系列,包含低價位的 架構的運動控制器系列,包含低價位的 NI 733x NI 733x 系列、中階的 系列、中階的 NI 734x NI 734x 系列,與高效能的 系列,與高效能的 NI 73NI 735x 5x 系列。系列。 NI 733x NI 733x 系列的低價位控制器,具備 系列的低價位控制器,具備 4 4 軸式步軸式步進馬達控制,還有多項應用所需的基本功能,包含單軸與多進馬達控制,還有多項應用所需的基本功能,包含單軸與多軸的點對點運動。軸的點對點運動。 NI 734x NI 734x 系列為中階產品,具備最多 系列為中階產品,具備最多 4 4 軸的步進與伺服控制,還有如軌跡追蹤 軸的步進與伺服控制,還有如軌跡追蹤 (Contouring) (Contouring) 與與電子傳動 電子傳動 (Electronic gearing) (Electronic gearing) 的進階功能。的進階功能。 NI 735x NI 735x 為為高階系列,具備最多 高階系列,具備最多 8 8 軸的步進與伺服控制、額外的 軸的步進與伺服控制、額外的 I/OI/O ,,還有多項高階功能;如無刷馬達的弦波整流 還有多項高階功能;如無刷馬達的弦波整流 (Sinusoidal c(Sinusoidal commutation)ommutation) ,與高速整合的 ,與高速整合的 4 MHz 4 MHz 週期性斷點 週期性斷點 (Perio(Periodic breakpoint)dic breakpoint) ,或稱位置觸發器 ,或稱位置觸發器 (Position trigger)(Position trigger) 。。
運動控制器運動控制器 建立客制的運動控制器建立客制的運動控制器
雖然目前具備 雖然目前具備 DSP DSP 的運動控制器已可適用於多項應用,的運動控制器已可適用於多項應用,但若提到 但若提到 200 kHz 200 kHz 伺服更新率的高精確度運動控制作業,伺服更新率的高精確度運動控制作業,工程師即必須透過客制化印刷電路板 工程師即必須透過客制化印刷電路板 (PCB) (PCB) 設計所需的設計所需的運動控制器。如此一來,不僅必須提高開發成本與時間,運動控制器。如此一來,不僅必須提高開發成本與時間,其運動控制器固定功能亦將缺乏重新設計彈性,亦無法於其運動控制器固定功能亦將缺乏重新設計彈性,亦無法於執行期間適應運動控制運算式的變動。某些需要較高精確執行期間適應運動控制運算式的變動。某些需要較高精確度與彈性的應用,則包含半導體產業的晶圓處理機器,或度與彈性的應用,則包含半導體產業的晶圓處理機器,或是汽車產業的執行期間可重設組裝線 是汽車產業的執行期間可重設組裝線 (Reconfigurable-a(Reconfigurable-at-run-time) t-run-time) 的產線內車輛排序 的產線內車輛排序 (In-line vehicle seque(In-line vehicle sequencingncing ,, ILVS) ILVS) 作業。 作業。
運動控制器運動控制器
NI NI 以可重設 以可重設 I/O (RIO) I/O (RIO) 搭配 搭配 NI SoftMotion NI SoftMotion 技術,再輔以 技術,再輔以 FPGA FPGA 的完整彈性,特別適用於的完整彈性,特別適用於高精確度的客制化運動控制作業。除了高精確高精確度的客制化運動控制作業。除了高精確度的應用之外,機器工程師與 度的應用之外,機器工程師與 OEM OEM 廠商亦可廠商亦可使用 使用 NI SoftMotion NI SoftMotion 開發模組,於多款平台中開發模組,於多款平台中建置 建置 NI LabVIEW NI LabVIEW 的多軸整合運動控制功能 – 的多軸整合運動控制功能 – 從 從 NI NI 插卡式 插卡式 M M 系列 系列 DAQ DAQ 介面卡,適用於介面卡,適用於工業級電腦與 工業級電腦與 PXIPXI;到使用 ;到使用 NI CompactRIO NI CompactRIO 與 與 NI Compact FieldPoint NI Compact FieldPoint 可程式化自動控可程式化自動控制器 制器 (PAC) (PAC) 的堅固系統。的堅固系統。
移動類型移動類型
單軸、點對點運動單軸、點對點運動
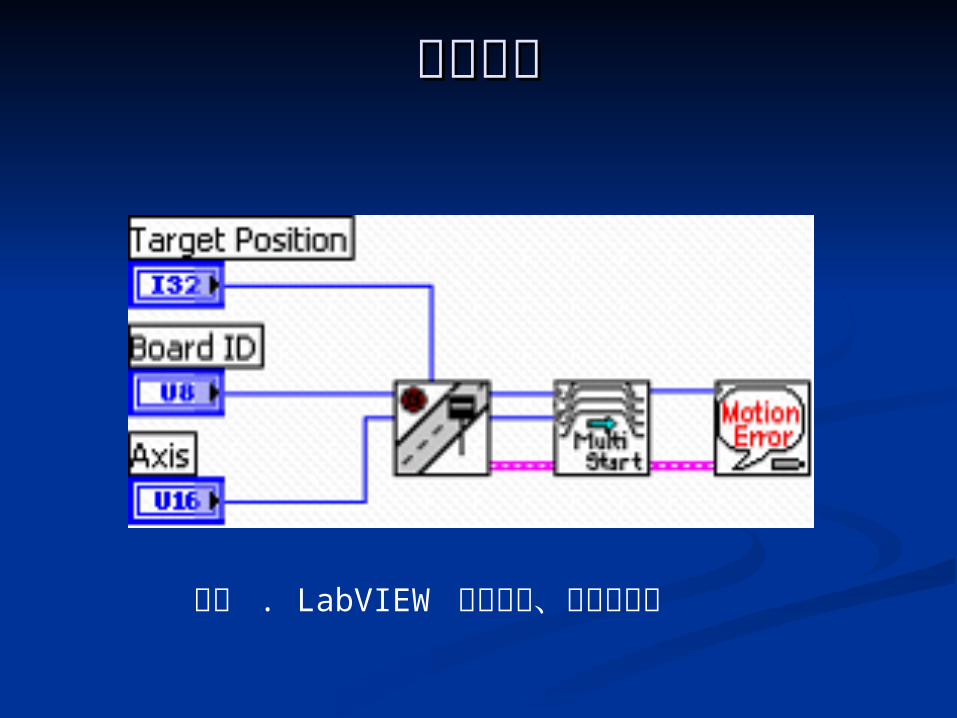
最常使用的軌跡之一,即為簡單的單軸、最常使用的軌跡之一,即為簡單的單軸、點對點移動;此運動需要軸線所將移動的點對點移動;此運動需要軸線所將移動的位置。同時亦需要運動產生時的速度與加位置。同時亦需要運動產生時的速度與加速度 速度 (( 一般均使用預設值一般均使用預設值 )) 。下圖即是使用。下圖即是使用預設速度與加速度,於 預設速度與加速度,於 LabVIEW LabVIEW 中移動中移動單軸的情況。單軸的情況。
移動類型移動類型
上圖 . LabVIEW 中的單軸、點對點運動
移動類型移動類型 整合式多軸運動整合式多軸運動
另外 另外 1 1 種運動即整合了多軸運動或向量運動。此種運動即整合了多軸運動或向量運動。此種移動一般均為 種移動一般均為 2D 2D 或 或 3D 3D 空間的點對點運動。空間的點對點運動。向量移動時,需要 向量移動時,需要 XX 、、 YY ,及,及 // 或 或 Z Z 軸上的最軸上的最後位置。而運動控制器亦需要某種類型的向量速後位置。而運動控制器亦需要某種類型的向量速度與加速度。此運動軌跡一般均用於 度與加速度。此運動軌跡一般均用於 XY-type XY-type 的的應用中,如掃瞄或自動化顯微作業 應用中,如掃瞄或自動化顯微作業 (Microscopy)(Microscopy) 。。下圖即是使用 下圖即是使用 LabVIEW LabVIEW 完成雙軸移動。若要進完成雙軸移動。若要進一步了解整合式運動,可參閱 一步了解整合式運動,可參閱 NI-Motion NI-Motion 驅動驅動程式中的 程式中的 LabVIEW Multiaxis.llb LabVIEW Multiaxis.llb 函式庫範例。函式庫範例。
移動類型移動類型 軌跡混合 軌跡混合 (Blended)(Blended) 運動運動
軌跡混合運動,即混合了 軌跡混合運動,即混合了 2 2 組移動使其成為僅 組移動使其成為僅 1 1 組運動。軌跡混合運動需要 組運動。軌跡混合運動需要 2 2 組移動,還有 組移動,還有 1 1 組可指定混合尺寸的混合因子 組可指定混合尺寸的混合因子 (Blend factor)(Blend factor) 。。軌跡混合 軌跡混合 (Blending) (Blending) 極適用於 極適用於 2 2 組不同移動之組不同移動之間的連續運動應用。然而,在混合軌跡運動中,間的連續運動應用。然而,在混合軌跡運動中,系統將不會通過原始軌道中的所有運動點。若路系統將不會通過原始軌道中的所有運動點。若路徑上的特定位置極為重要,則可考慮採用軌跡追徑上的特定位置極為重要,則可考慮採用軌跡追蹤 蹤 (Contouring) (Contouring) 運動。運動。
移動類型移動類型 軌跡追蹤 軌跡追蹤 (Contouring)(Contouring) 運動運動
透過軌跡追蹤 透過軌跡追蹤 (Contouring)(Contouring) ,即可構成,即可構成位置緩衝區 位置緩衝區 (Position buffer)(Position buffer) ,並建立平,並建立平滑的路徑或曲線 滑的路徑或曲線 (Spline)(Spline) 。與軌跡混合相。與軌跡混合相較,軌跡追蹤可確保系統通過各個位置,較,軌跡追蹤可確保系統通過各個位置,因此較具有優勢。因此較具有優勢。
移動類型移動類型
電子傳動 電子傳動 (Electronic Gearing)(Electronic Gearing)
透過電子傳動功能,不需使用實際的齒輪透過電子傳動功能,不需使用實際的齒輪或傳動軸,即可模擬 或傳動軸,即可模擬 2 2 組齧合齒輪之間所組齧合齒輪之間所發生的運動。只要提供子軸、主軸、編碼發生的運動。只要提供子軸、主軸、編碼器,或 器,或 AC AC 通道之間的齒輪比 通道之間的齒輪比 (Gear rati(Gear ratio)o) ,即可使用電子傳動功能。,即可使用電子傳動功能。

馬達放大器與驅動馬達放大器與驅動
馬達放大器或驅動均為系統的 馬達放大器或驅動均為系統的 1 1 部分。運動控制部分。運動控制器先以低電流的類比電壓訊號構成指令,在馬達放器先以低電流的類比電壓訊號構成指令,在馬達放大器接收之後,再將之轉換為高電流的訊號以驅動大器接收之後,再將之轉換為高電流的訊號以驅動馬達。馬達驅動具有多種不同的變數,以符合所驅馬達。馬達驅動具有多種不同的變數,以符合所驅動的不同類型馬達。舉例來說,步進馬達驅動即連動的不同類型馬達。舉例來說,步進馬達驅動即連接步進馬達,而不會連接伺服馬達。接步進馬達,而不會連接伺服馬達。
除了搭配對應的馬達技術之外,驅動亦必須提供正除了搭配對應的馬達技術之外,驅動亦必須提供正確的電壓、連續電流,與峰值電流,以驅動該馬達。確的電壓、連續電流,與峰值電流,以驅動該馬達。若驅動供應過多電流,則可能損毀馬達。若驅動供若驅動供應過多電流,則可能損毀馬達。若驅動供應電流不足,則馬達無法達到完全的轉矩功能。若應電流不足,則馬達無法達到完全的轉矩功能。若電壓不足,則馬達將無法全速運轉。電壓不足,則馬達將無法全速運轉。
馬達放大器與驅動馬達放大器與驅動 使用者亦必須考量放大器與控制器的連接方使用者亦必須考量放大器與控制器的連接方法。某幾間馬達公司所銷售的驅動,均可輕法。某幾間馬達公司所銷售的驅動,均可輕鬆連接自家的馬達產品。鬆連接自家的馬達產品。 NI NI 所提供的驅動,所提供的驅動,可同時用於雙相位 可同時用於雙相位 (Two-phase) (Two-phase) 步進馬達步進馬達與 與 DC DC 帶刷伺服馬達。這些驅動均具備螺帶刷伺服馬達。這些驅動均具備螺絲固定端點,可連接多款不同的馬達。下圖絲固定端點,可連接多款不同的馬達。下圖則說明 則說明 NI NI 馬達驅動的相異處。馬達驅動的相異處。

馬達放大器與驅動馬達放大器與驅動
若要連接其他製造商的驅動與放大器,若要連接其他製造商的驅動與放大器, NI NI 則提供通用運動介面 則提供通用運動介面 (Universal motion i(Universal motion interfacenterface ,, UMI) – UMI) – 具備螺絲固定端點連具備螺絲固定端點連結功能的標準 結功能的標準 UMI-7764UMI-7764 ;還有具備 ;還有具備 24 V 24 V 邏輯數位 邏輯數位 I/O I/O 與 與 D-SUB D-SUB 連結功能的工業連結功能的工業級 級 UMI-7774UMI-7774 。。

馬達與機器元素馬達與機器元素
在設計運動控制系統時,馬達選擇與機器在設計運動控制系統時,馬達選擇與機器設計均為關鍵部分。雖然多家馬達公司均設計均為關鍵部分。雖然多家馬達公司均可協助客戶選擇正確的馬達,但是使用者可協助客戶選擇正確的馬達,但是使用者最好能夠再選擇馬達之前,先行了解某些最好能夠再選擇馬達之前,先行了解某些基本概念。基本概念。
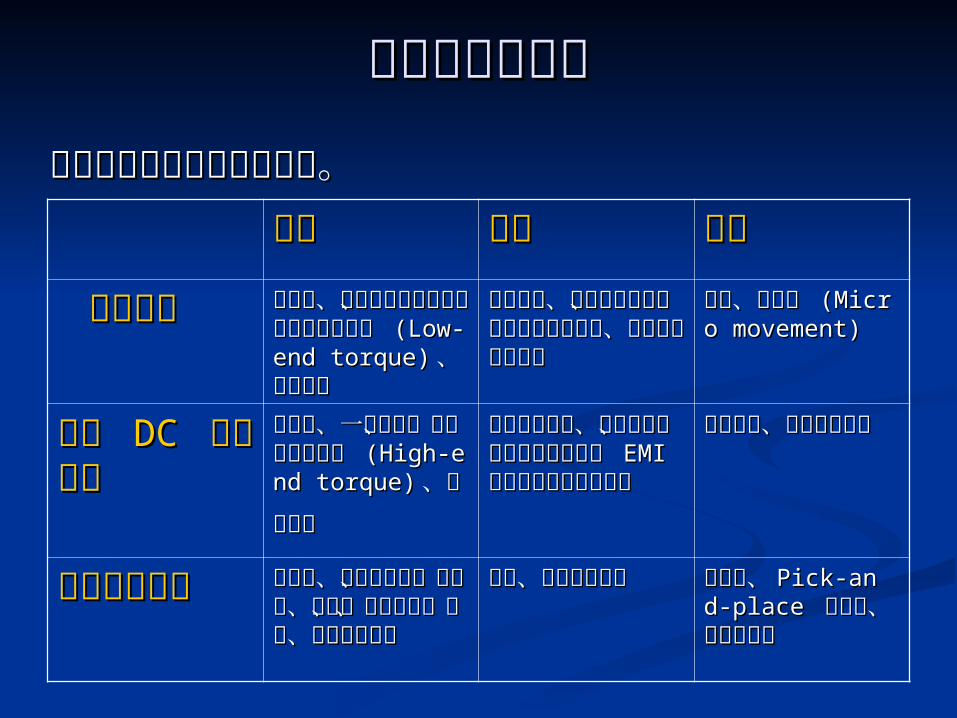
馬達與機器元素馬達與機器元素
優點優點 缺點缺點 應用應用 步進馬達步進馬達 低價位、可透過開低價位、可透過開
迴路運轉、極佳的迴路運轉、極佳的低端轉矩 低端轉矩 (Low-e(Low-end torque)nd torque) 、不、不佔空間佔空間
噪音較大、缺乏高噪音較大、缺乏高速轉矩、不適用於速轉矩、不適用於炎熱環境、不適用炎熱環境、不適用於多變負載 於多變負載
定位、微位移 定位、微位移 (Mi(Micro movement) cro movement)
帶刷 帶刷 DC DC 伺服馬達 伺服馬達
低價位、一般素度、低價位、一般素度、極佳的高端轉矩 極佳的高端轉矩 (High-end torqu(High-end torqu
e)e) 、簡易驅動、簡易驅動
必須進行維護、較必須進行維護、較佔空間、電刷火花佔空間、電刷火花可能造成 可能造成 EMI EMI 或或對易燃環境造成危對易燃環境造成危險 險
速度控制、高速位速度控制、高速位置控制 置控制
無刷伺服馬無刷伺服馬達 達
免維護、使用壽命免維護、使用壽命長、無火花、高速、長、無火花、高速、不佔空間、安靜、不佔空間、安靜、運轉時不發熱 運轉時不發熱
昂貴、驅動構造複昂貴、驅動構造複雜 雜
機器人、機器人、 Pick-anPick-and-place d-place 機器臂、機器臂、高轉矩應用 高轉矩應用
下圖即說明不同的馬達技術。下圖即說明不同的馬達技術。
馬達與機器元素馬達與機器元素 根據所要使用的技術,再進一步決定馬達軸芯的根據所要使用的技術,再進一步決定馬達軸芯的
轉矩與慣性。若要計算系統轉矩,請參閱 轉矩與慣性。若要計算系統轉矩,請參閱 zone.zone.ni.comni.com 的馬達基本概念文件。的馬達基本概念文件。
當選擇馬達或其他機件時,可能亦需考量現成的當選擇馬達或其他機件時,可能亦需考量現成的致動器 致動器 (( 如單階如單階 ) ) 是否適合應用。致動器的階層 是否適合應用。致動器的階層 (Stage) (Stage) 將傳輸電能以達有效的旋轉或線性運動,將傳輸電能以達有效的旋轉或線性運動,而不需再由使用者設計之。可透過 而不需再由使用者設計之。可透過 ni.com/motni.com/motion/advisorsion/advisors 中的 中的 Stage AdvisorStage Advisor ,找到多家 ,找到多家 NI NI 聯盟夥伴所提供的階層。聯盟夥伴所提供的階層。

反饋 反饋 (Feedback) (Feedback) 裝置與運動 裝置與運動 I/OI/O
反饋 反饋 (Feedback)(Feedback) 裝置裝置
反饋裝置可協助運動控制器了解馬達位置。最常反饋裝置可協助運動控制器了解馬達位置。最常見的位置反饋裝置,即為相位差編碼器 見的位置反饋裝置,即為相位差編碼器 (Quadra(Quadrature encoder)ture encoder) ,可提供起始點的相對位置。大,可提供起始點的相對位置。大多數的運動控制器,均為搭配使用此類型的編碼多數的運動控制器,均為搭配使用此類型的編碼器所設計。其他反饋裝置則包含可提供類比位置器所設計。其他反饋裝置則包含可提供類比位置反饋的位移計 反饋的位移計 (Potentiometer)(Potentiometer) 、提供速度反饋、提供速度反饋的轉速計 的轉速計 (Tachometer)(Tachometer) 、可進行絕對位置量測、可進行絕對位置量測的絕對編碼器,還有可進行絕對位置量測的解析的絕對編碼器,還有可進行絕對位置量測的解析器 器 (Resolver)(Resolver) 。當使用 。當使用 NI NI 運動控制器時,則運動控制器時,則可使用相位差編碼器與位移計。 可使用相位差編碼器與位移計。
反饋 反饋 (Feedback) (Feedback) 裝置與運動 裝置與運動 I/OI/O
運動 運動 I/OI/O
運動控制中的其他重要 運動控制中的其他重要 I/OI/O ,包含限動開關、原,包含限動開關、原點開關、位置觸發器,與位置擷取輸入。限動開點開關、位置觸發器,與位置擷取輸入。限動開關 關 (Limit switch) (Limit switch) 可通知運動結束的資訊,以可通知運動結束的資訊,以避免造成系統毀損。當運動系統接觸到限動開關避免造成系統毀損。當運動系統接觸到限動開關時,一般均將停止移動。而原點開關 時,一般均將停止移動。而原點開關 (Home swi(Home switch) tch) 將指出系統的原點位置,以協助使用者定義將指出系統的原點位置,以協助使用者定義參考點。此功能對 參考點。此功能對 Pick-and-place Pick-and-place 機器臂的應機器臂的應用特別重要。用特別重要。
反饋 反饋 (Feedback) (Feedback) 裝置與運動 裝置與運動 I/OI/O
當整合其他裝置時,如位置觸發器輸出,或位置當整合其他裝置時,如位置觸發器輸出,或位置擷取輸入的觸發器就顯得重要。透過位置觸發器擷取輸入的觸發器就顯得重要。透過位置觸發器輸出 輸出 (( 亦稱為斷點與位置比較亦稱為斷點與位置比較 )) ,即可將觸發器,即可將觸發器設定於預先輸入的位置進行作業。此類型的動作設定於預先輸入的位置進行作業。此類型的動作特別適用於如掃瞄作業,而使用者可能必須觸發 特別適用於如掃瞄作業,而使用者可能必須觸發 1 1 組系統,使其能夠在預先設定的位置上進行量組系統,使其能夠在預先設定的位置上進行量測。而位置擷取輸入 測。而位置擷取輸入 (Position capture input)(Position capture input) ,,可讓運動控制器迅速擷取事件發生的位置,並將可讓運動控制器迅速擷取事件發生的位置,並將之儲存至記憶體中。若使用者擁有外部觸發器,之儲存至記憶體中。若使用者擁有外部觸發器,且欲知道於系統中發生的位置時,則可透過位置且欲知道於系統中發生的位置時,則可透過位置擷取輸入進行作業。擷取輸入進行作業。