Embed Size (px)
DESCRIPTION
В сборнике опубликованы статьи ученых, аспирантов, магистров и инженеров ведущих предприятий и высших учебных заведений Украины, в которых приведены результаты научных исследований и разработок, выполненных в 2013-2014 годах согласно направлений: автоматизация технологических процессов, компьютерные информационные технологии, информационно-измерительные системы, электронные и микропроцессорные приборы.
Citation preview

ISSN 2075-4272
МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
НАУКОВІ ПРАЦІ ДОНЕЦЬКОГО НАЦІОНАЛЬНОГО
ТЕХНІЧНОГО УНІВЕРСИТЕТУ
Серія: “Обчислювальна техніка та автоматизація”
№ 1(26)’2014
Донецьк 2014

МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
НАУКОВІ ПРАЦІ ДОНЕЦЬКОГО НАЦІОНАЛЬНОГО
ТЕХНІЧНОГО УНІВЕРСИТЕТУ
Серія: “Обчислювальна техніка та автоматизація”
Всеукраїнський науковий збірник
Заснований у липні 1998 року
Виходить 2 рази на рік
№ 1(26)’2014
Донецьк 2014

УДК 681.5: 658.5: 621.3 Друкується за рішенням Вченої ради державного вищого навчального закладу «Донецький національний технічний університет» (протокол № 6 від 20.06.2014).
У збірнику опубліковано статті науковців, аспірантів, магістрів та інженерів провідних підприємств і вищих навчальних закладів України, в яких наведено результати наукових досліджень та розробок, виконаних у 2013-2014 роках згідно напрямків: автоматизація технологічних процесів, комп'ютерні інформаційні технології, інформаційно-вимірювальні системи, електронні і мікропроцесорні прилади.
Матеріали збірника призначено для викладачів, наукових співробітників, інженерно-технічних робітників, аспірантів та студентів, що займаються питаннями розробки і використання автоматичних, комп'ютерних і електронних систем.
Засновник та видавець – Донецький національний технічний університет Редакційна колегія: О.А. Мінаєв, чл-кор. НАН України, д-р техн. наук, проф., головний редактор; Є.О. Башков, д-р техн. наук, проф., заступник головного редактора; Є.Б. Ковальов, д-р техн. наук, проф., відп. секретар випуску; Ахім Кінлє д-р техн. наук, проф.; Іван Тауфер д-р техн. наук, проф.; А.А. Зорі, д-р техн. наук, проф.; О.Г. Воронцов, д-р техн. наук, проф.; Ю.О. Скобцов, д-р техн. наук, проф.; Н.І. Чичикало, д-р техн. наук, проф.; М.М. Заблодський, д-р техн. наук, проф.; В.В. Турупалов, канд. техн. наук, проф.; К.М. Маренич, канд. техн. наук, проф.; О.В. Хорхордін, канд. техн. наук, доц.; М.Г. Хламов, канд. техн. наук, доц.; Б.В. Гавриленко, канд. техн. наук, доц.
Свідоцтво про державну реєстрацію друкованого засобу масової інформації: серія КВ № 7376 від 03.06.2003.
Збірник включено до переліку наукових фахових видань України, в яких можуть
публікуватися результати дисертаційних робіт на здобуття наукових ступенів доктора і кандидата наук (затверджено постановою президії ВАК України № 1-05/5 від 01. 07. 2010 р., надруковано в бюлетені ВАК №7, 2010).
Збірник включено до бібліографічної бази даних наукових публікацій Російський індекс
наукового цитування (РІНЦ) (http://elibrary.ru/title_about.asp?id=38108) ISSN 2075-4272 © Донецький національний технічний університет, 2014

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
3
ЗМІСТ Стор.
Розділ 1 Автоматизація технологічних процесів 5
Борисов А.А. Применение FF-, FB-, MFC-AGC регуляторов в концепции управления приводами клетей прокатного стана по мощности. 6
Воротникова З.Е. Формирование и использование архивной базы данных в системе «советчик оператора доменной печи» 14 Суздаль В.С., Тавровский И.И., Соболев А.В., Кобылянский Б.Б Система с параметрической инвариантностью для процессов кристализации 24
Лапта C.C., Масолова Н.В., Зиновьева Я.В. Развитие теории моделирования переходного процесса в сложной гомеостатической системе 29
Мироненко Л.П., Петренко И.В., Власенко А.Ю. Интеграл Ньютона-Лейбница и вторая интегральная теорема о среднем 36
Найденова Т.В., Федюн Р.В. Синтез САУ процессом биохимической водоочистки 41
Федюн Р.В. Автоматичне управління занурювальними насосами водовідливу ліквідованих шахт 51
Гарматенко А.М. Алгоритм поиска кратковременной памяти в данных акустической эмиссии угольных пластов 61
Розділ 2 Інформаційні технології та телекомунікації 69 Воропаєва А.О. Розробка методу керування безпроводовими телекомунікаційними мережами нового покоління на основі застосування підходу максимізації завантаженості мережі 70
Гостев В.И., Кунах Н.И., Артющик А.С. Аппроксимация звена чистого запаздывания для AQM-систем комплексной передаточной функцией звена Паде 77
Дегтяренко И.В., Лозинская В.Н. Динамические модели средств управления трафиком в сетевом узле 85
Дмитриева О.А. Оптимизация выполнения матрично-векторных операция при параллельном моделировании динамических процессов 94
Євсеєва О.Г. Використання комп'ютерно-орієнтованих засобів проектування і організації навчання математики на засадах діяльнісного підходу в технічному університеті 101 Воропаєва В.Я., Жуковська Д.О. Оцінка впливу алгоритмів обробки черг на показники QOS 111
Воропаева В.Я., Кабакчей В.И. Выбор методов оценки количества меток в рабочей зоне RFID-ридера для достижения максимальной пропускной способности 119
Кануннікова К.П., Червинський В.В. Алгоритм динамічного регулювання споживаної потужності мікростільниками гетерогенної мережі LTE 126
Klymash M.M., Haider Abbas Al-Zayadi, Lavriv O.A. Improving thoughput using channel quality indicator in LTE technology
134

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
4
Мірошкін О.М. Модифікація системи адресації мікрокоманд у пристрої керування при його реалізації у базисі гібридних FPGA 144
Молоковский И.А. Моделирование процессов распространения радиоволн в подземной части угледобывающего предприятия 152
Пасічник В.В., Назарук М.В. Інформаційно-технологічний супровід системних трансформацій вітчизняної освітньої галузі 160
Батыр С.С., Хорхордин А.В. Особенности оценки эффективности методов управления очередью маршрутизатора 169
Розділ 3 Інформаційно-вимірювальні системи, електронні та мікропроцесорні прилади 177
Вовна А.В., Зори А.А. Оптический измеритель концентрации метана с аппаратно-программной компенсацией температурного дрейфа 178
Жукова Н.В., Литвинов В.И., Голиков В.В. Лабораторный стенд регулируемого линейного асинхронного электропривода – аналога электропривода постоянного тока 189
Кузнецов Д.Н., Чупис Д.А. Исследование физической модели ступенчатого испытательного воздействия для определения динамических характеристик термопреобразователей 202 Куценко В.П. Математичне моделювання властивостей діелектричних матеріалів при використанні мікрохвильових експертних систем 210
Лыков А.Г., Косарев Н.П. Исследование влияния ширины спектра излучения источника на чувствительность измерительных каналов газоанализаторов выхлопных газов автомобильного транспорта 218
Штепа А.А. Обоснование концепции структурно алгоритмической организации модульной компьютеризированной информационно-измерительной системы электрофизиологических сигналов 226

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
5
Розділ 1 Автоматизація технологічних процесів

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
© Борисов А.А., 2014 6
УДК 621.771.2:681.513.6
А.А. Борисов (канд. техн. наук, доц.), ГВУЗ «Донецкий национальный технический университет», г. Донецк
кафедра автоматики и телекоммуникаций e-mail: [email protected]
ПРИМЕНЕНИЕ FF-, FB-, MFC-AGC РЕГУЛЯТОРОВ В КОНЦЕПЦИИ УПРАВЛЕНИЯ ПРИВОДАМИ КЛЕТЕЙ ПРОКАТНОГО СТАНА ПО МОЩНОСТИ
Выполнен анализ целесообразности применения FF-AGC, FB-AGC, MFC-AGC регуляторов в системах регулирования процесса холодной листопрокатки при управлении главными приводами клетей прокатного стана по мощности. Рассмотрена концепция комбинированного управления толщиной листа по возмущению с помощью FF-AGC регулятора и межклетевым натяжением по отклонению с помощью FB-AGC регулятора. MFC-AGC регулятор используется как регулятор верхнего уровня, так как он наиболее полно охватывает динамику всего прокатного стана. Ключевые слова: прокатный стан, гидравлическое нажимное устройство, математическая модель, давление, закон управления, передаточная функция.
Актуальность темы и общая постановка проблемы Улучшение качественных параметров листопроката является одной из актуальнейших
проблем металлургической промышленности. Реконструкция цехов непрерывной холодной прокатки листа с целью производства продукции, удовлетворяющей современным требованиям автомобильной, электротехнической и т.д. отраслей, позволит украинским предприятиям эффективно конкурировать с мировыми производителями. Получить качество металлического листа, которое удовлетворяло бы современным требованиям, без эффективной системы автоматического управления прокатным станом невозможно. Это, в первую очередь, связано с необходимостью согласования работы нескольких клетей, которые влияют одна на другую через металлическую полосу. Совершенствование математического описания непрерывной прокатки с точки зрения автоматизации, методов управления непрерывным станом и создание таких систем, которые, учитывая специфические особенности непрерывного стана, повышают эффективность его функционирования и качество производимой продукции, является важной научной задачей.
Одним из перспективных способов управления станами непрерывной холодной прокатки является регулированием по мощности главного привода. В [1] было рассмотрено, что мощность электродвигателя клети может быть определена как электрическими, так и механическими величинами: vFwMuiP , где P - мощность электродвигателя, u - напряжение на двигателе, i - ток двигателя, w - угловая скорость двигателя, M - нагрузочный момент двигателя, v - линейная скорость проката, F - сила деформации металла. Мощность двигателя главного привода клети прокатного стана определяют следующие составляющие:
10 ТТДИНДХХГП РРРРРP , где ГПP - полная мощность двигателя главного привода,
ХХР - мощность холостого хода валковой системы, ДР - мощность деформации проката,
ДИНР - динамическая мощность сил инерции, 10 , ТТ РР - мощности, обусловленные наличием натяжений проката соответственно до и после клети.
Идея управления непрерывным станом заключается в поддержании в клетях соответствующих мощностей деформации прокатываемого материала ДР с целью

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
7
стабилизации толщины выхода проката за счёт максимального использования самовыравнивающих свойств многоклетевого непрерывного стана.
В системах автоматического управления прокатными станами получили широкое распространение FF-AGC, FB-AGC, MFC-AGC регуляторы. Их сравнительный анализ и соответствующие выводы о целесообразности применения в тех или иных локальных системах регулирования процесса листопрокатки являются актуальным направлением исследования при создании современной концепции управления многоклетевыми станами непрерывной холодной прокатки по мощности главных приводов.
Одной из проблем рассматриваемого управления является проблема достаточно точного выделения мощности деформации прокатываемого материала
10 ТТДИНХХГПД РРРРРP . Если мощность холостого хода валковой системы ХХР практически является постоянной величиной и может быть измерена как мощность потребляемая ненагруженной клетью, ДИНР определяется моментом инерции валковой системы и также является известной величиной, то 10 , ТТ РР , которые возможно вычислить на основе измерения соответствующих натяжений, могут вносить основную погрешность как внешние возмущения от соседних клетей. В [1,2] был предложен способ холодной прокатки листа, при котором разнотолщинность подката максимально устраняется первой клетью непрерывного стана, а в последующих клетях достигается его необходимое обжатие. Таким образом, возмущение на входе стана практически не распространяется по всему стану. Было показано, что при увеличении толщины подката на входе в первую клеть, данную клеть целесообразно по определённому закону замедлять. Это позволяет стабилизировать скорость проката на выходе клети и его натяжение между первой и второй клетью стана. Необходимо отметить, что у первой клети практически отсутствует заднее натяжение листа (т.е. на её натяжение на её входе можно принять равным 0). Таким образом, 0ТР для первой клети можно не учитывать. Таким образом, в модели целесообразно учитывать только два переменных выходных параметра - толщину подката и натяжение между смежными клетями, т.е. она должна быть двухсвязной. Так как быстродействие контуров управления главными приводами как правило значительно ниже быстродействия контуров нажимных устройств, целесообразно
Постановка задач исследования Для построения концепции системы автоматизированного управления непрерывным
прокатным станом необходимо решить следующие основные задачи: - разработать двусвязную модель клети прокатного стана как объекта управления; - проанализировать особенности применения FF-AGC, FB-AGC, MFC-AGC
регуляторов в схемах локальных системах регулирования процесса листопрокатки; - разработать методы управления прокатным станом исходя из вышеизложенных
положений. Решение задач и результаты исследований Исходя из системного анализа процессов обжатия листа в клети, соответствующая
двумерная модель клети, учитывающая, что при увеличении момента прокатки вследствие увеличения толщины подката скорость привода падает по определённому закону, соответствующему закону управления, предусматривающему определённое уменьшение скорости, и, наоборот, при уменьшении момента прокатки вследствие уменьшения толщины подката скорость привода возрастает по такому же закону, представлена на рис. 1. Здесь
)( pK Hi - передаточная функция замкнутой системы управления нажимным устройством, )( puHi - значение управляющего сигнала на входе системы управления нажимным
устройством, )( pK wi - передаточная функция замкнутой системы управления скоростью

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
8
двигателя главного привода, )( puwi - задание на систему управления скоростью двигателя главного привода, )( pK Mi - передаточная функция двигателя главного привода по моменту нагрузки, )( pM Ci - момент нагрузки двигателя главного привода, iR - радиус валков,
TMH kkk ,, - подстраиваемые коэффициенты соответственно в каналах изменения толщины, момента прокатки и натяжения полосы, )( pi - переменное межклетевое запаздывание, p – оператор Лапласа.
Рисунок 1 - Модель клети прокатного стана как двусвязного объекта управления
Определены возможные способы управления двигателями главного привода прокатного стана:
- скорость двигателя каждой последующей клети изменяется относительно скорости двигателя предыдущей клети, а скорость первой клети неизменна;
- в зависимости от толщины подката изменяется только скорость двигателя первой клети, а скорости двигателей всех последующих клетей практически постоянны;
- относительно неизменна скорость какого-либо промежуточного двигателя главного привода, а скорости предыдущих и последующих двигателей удовлетворяют условию сплошности.
Выполнен анализ данных способов управления и показаны существенные преимущества второго из них:
- транспортное запаздывание в межклетевых промежутках, начиная со второй клети, здесь в отличие от других способов практически инвариантно относительно возмущения толщины листа на входе стана, что позволяет достаточно просто реализовать систему компенсации эксцентриситета валков в смежных клетях;
- значительно упрощается задача верхнего уровня, так как возмущение толщины листа на входе стана не проходит в последующие клети;
- значительно уменьшаются требования к динамическим характеристикам систем главного привода и нажимных устройств, начиная со второй клети, что позволяет снизить стоимость технологического оборудования;
)( pТ i
)( pu)( puwi
)(1 pH i
)( pM ci
)( pH i
)( pKHi
)( pKwi
),( iiMi Pk
iR
)( puHi
),,( 1 pwHk iiTi
)( pH i
)( pu
))(( iiHi TPk
)( pKMi
ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
9
- повышается надёжность работы системы управления за счёт упрощения алгоритмов и уменьшения объёмов вычислений.
Таким образом, целесообразно максимально подавлять возмущения толщины входящего листа уже первой клетью стана, а не "исправлять" разнотолщинность во всех последующих клетях. В них достигается только требуемое обжатие листа и максимально используются самовыравнивающие свойства прокатного стана.
Анализ различных схем управления показал, что в данном случае для управления скоростью первой клети наиболее эффективно применение FF-AGC регулятора по возмущению толщины поступающей в клеть полосы, действующего в функции показаний толщиномера перед клетью в сочетании с режимом "жёсткая клеть" системы управления гидронажимным устройством клети. При этом необходимо обеспечить максимально эффективную компенсацию эксцентриситета валков, так как известно, что в режиме "жёсткая клеть" влияние эксцентриситета наиболее выражено. Также необходимо обеспечить компенсацию скоростного эффекта и других возмущений определяемых конкретной технологией производства. К конструктивным особенностям клети при данном способе регулирования предъявляется требование минимального момента инерции валковой системы, так как именно этот параметр определяет максимальную величину мгновенной мощности требуемой для обеспечения необходимого быстродействия в контуре управления главным приводом. Таким образом минимизация момента инерции валковой системы позволяет уменьшить требования к пиковой мощности электрооборудования и определить ещё при проектировании меньшие ограничения.
Для стабилизации натяжения между первой и последующей клетью целесообразно использовать FВ-AGC регулятор, так как он практически мгновенно реагирует на изменение натяжения, что невозможно при использовании данного регулятора для стабилизации толщины листа на выходе клети с прямым её измерением. Таким образом, фактически целесообразно использовать комбинированное управление толщиной листа по возмущению и межклетевым натяжением по отклонению.
Исходя из вышеизложенного и модели на рис. 1, двусвязная модель первой клети имеет вид:
)),()(()();()()(
);()()()(
10212,12,1
111
2,11111
pwHwpHkppTpupKpw
pTkpupKpH
T
ww
НHH
или
).()()()(
);()()()(
1102,1
122,1
2,1
2,11111
pupKp
HkpH
pwk
pT
pTkpupKpH
wwTT
НHH
Анализируя данную систему можно заметить, что толщина на выходе клети зависит от натяжения листа, которое, в свою очередь зависит от скорости последующей клети. Дальнейшее совершенствование динамической модели возможно путём учёта менее влияющих факторов на процесс прокатки.
Аналогичную модель целесообразно применить и для последней клети многоклетевого стана, но с тем отличием, что здесь необходимо для стабилизации межклетевого натяжения с предыдущей клетью при увеличении толщины подката ускорять клеть. Конструктивно здесь также должна быть предусмотрена минимизация момента инерции валковой системы.
Промежуточные клети обеспечивают только необходимое обжатие листа и, поэтому, никаких специфических требований к ним не предъявляется.
В параметрах состояния, с учётом упругих свойств трансмиссии от двигателя до прокатных валков [3], соответствующее матрично-векторное уравнение, описывающее промежуточные клети, как объект управления по мощности имеет вид:

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
10
)()(
10
00
0
00
0
)(
)()(
)()(
00100
0010
0
001
00001
)(
)()(
)()(
tutu
J
J
TK
tТtwtM
tItU
J
JJK
JJJK
LС
LR
L
Т
tТ
twtM
tItU
T
w
В
В
П
Д
C
Д
ВД
M
ВДД
M
Д
C
,
где MK - конструктивная постоянная двигателя,
ТK П , - соответственно коэффициент усиления и постоянная времени тиристорного преобразователя,
ВД JJ , - моменты инерции двигателя и валковой системы (включая редуктор), - жёсткость упругого звена двигатель-валок, - коэффициент вязкого трения в упругом звене.
Общая концепция предложенного управления для 4-х клетевого прокатного стана представлена на рис. 2.
Рисунок 2 - Концепция управления 4-х клетевым станом по мощности MFC-AGC регулятор в данной концепции управления целесообразно использовать как
регулятор верхнего уровня, так как он наиболее полно охватывает динамику всего прокатного стана и является наиболее гибким. Данный закон регулирования может использоваться и в составе эталонной модели.
v0
H4 w1 T1H1 w3 w2 T3
MFC-AGC регулятор
Задание распределения обжатий по клетям и межклетевых натяжений
Двусвязная САУ
1-й клетью
11
0 vНН
САУ мощностью 2-й клети
22
1 vНН
САУ мощностью 3-й клети
33
2 vНН
Двусвязная САУ
4-й клетью
w
P2 P1
w1
v1 T1H0
P4
H4
w4
P3
v3
w3
T3T2 v2
H3 H2 w4
w4 w2 w3
T2

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
11
Моделирование динамики прокатного стана (рис. 3) с вышеизложенной концепцией управления показало соответствие его результатов положениям освещённым в данной работе. Из графиков видно, что наибольшим возмущениям подвержена первая клеть прокатного стана, а в остальных возмущения параметров значительно ниже.
Рисунок 3 – Реакция моментов главных приводов М и межклетевых натяжений Т на
случайное изменение толщины подката 4-х клетевого прокатного стана Выводы 1. Анализ различных схем управления показал, что при управлении по мощности
главных приводов прокатного стана для первой клети наиболее эффективно применение FF-AGC регулятора по возмущению толщины поступающей в клеть полосы, действующего в функции показаний толщиномера перед клетью в сочетании с режимом "жёсткая клеть" системы управления гидронажимным устройством клети.
2. Для первой клети необходимо обеспечить эффективную компенсацию эксцентриситета валков, так как известно, что в режиме "жёсткая клеть" влияние эксцентриситета наиболее выражено. Также необходимо обеспечить компенсацию скоростного эффекта и других возмущений определяемых конкретной технологией производства.
3. К конструктивным особенностям первой клети при данном способе регулирования предъявляется требование минимального момента инерции валковой системы, так как именно этот параметр определяет максимальную величину мгновенной мощности требуемой для обеспечения необходимого быстродействия в контуре управления главным приводом. Таким образом минимизация момента инерции валковой системы позволяет уменьшить требования к пиковой мощности электрооборудования и определить при проектировании меньшие ограничения.
4. Для стабилизации натяжения между первой и последующей клетью целесообразно использовать FВ-AGC регулятор, так как он практически мгновенно реагирует на изменение натяжения, что невозможно при использовании данного регулятора для стабилизации толщины листа на выходе клети с прямым её измерением. Таким образом, фактически целесообразно использовать комбинированное управление толщиной листа по возмущению и межклетевым натяжением по отклонению.
5. MFC-AGC регулятор в данной концепции управления целесообразно использовать как регулятор верхнего уровня, так как он наиболее полно охватывает динамику всего
0 5 10 15-0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0 5 10 150
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Т
1-2 2-3 3-4
1 3
t
M
t
2 4

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
12
прокатного стана и является наиболее гибким. Данный закон регулирования может использоваться и в составе эталонной модели.
6. Модель управления аналогичную первой клети целесообразно применить и для последней клети многоклетевого стана, но с тем отличием, что здесь необходимо для стабилизации межклетевого натяжения с предыдущей клетью при увеличении толщины подката ускорять клеть. Конструктивно здесь также должна быть предусмотрена минимизация момента инерции валковой системы.
Список использованной литературы 1. Борисов А.А. Разработка двумерной системы управления клетью непрерывного
листопрокатного стана / А.А. Борисов // Наукові праці Донецького національного технічного університету. Серія: Електротехніка та енергетика. – 2003. – Випуск 67. – С. 195–198.
2. Борисов А.А. Управление прокатным станом как многосвязным объектом с переменным межклетевым запаздыванием / А.А. Борисов, Г.В. Мокрый, С.С. Батыр // Наукові праці Донецького національного технічного університету. Серія: «Обчислювальна техніка та автоматизація». – 2007. – Випуск 112 (118). – С. 11-17.
3. Башарин А.В. Управление электроприводами: [Учебное пособие для вузов] / А.В. Башарин, В.А. Новиков, Г.Г. Соколовский. – Л.: Энергоатомиздат. Ленинградское отделение, 1982. – 392 с.
4. Тимошенко Э.В. Синтез систем управления параметрами полос при холодной прокатке / Э.В. Тимошенко, А.А. Самецкий. – К.: НВК «КІА», 1999. – 264 с.
5. Чернышев Н.Н. Синтез компенсаторов для комбинированных систем автоматического регулирования / Н.Н. Чернышев // Збірник наукових праць ДонІЗТ. Серія: «Автоматика, телемеханика, зв’язок». – 2012. – Випуск 32. – С. 52-56.
6. Жукова Н.В. Линейный асинхронный регулируемый електропривод с возможностью измерения электромагнитного момента / Н.В. Жукова, В.И. Литвинов, В.В. Голиков. - Київ: Видавництво КНУХТ, Автоматика, 2012. - С. 179-180.
References 1. Borisov, A.A. (2003), Razrabotka dvumernoy sistemy upravleniya kletiu nepreryvnogo
listoprokatnogo stana, DonNTU, Donetsk, vol. 67, pp. 195-198. 2. Borisov, A.A., Mokry, G.V. and Batyr, S.S. (2007), Upravleniye prokatnym stanom kak
mnogosvyaznym obektom s peremennym mezhkletevym zapazdyvaniem, DonNTU, Donetsk, vol. 112(118), pp. 11-17.
3. Basharin, A.V., Novikov, V.A. and Sokolovskij, G.G. (1982), Upravlenie elektroprivodami, Jenergoizdat, Leningrad, USSR.
4. Timoshenko, E.V. and Sametskiy A.A. (1999), Sintez sistem uprauleniya parametrami polos pri holodnoy prokatke, NVK "KIA", Kiev.
5. Chernyshev, N. N. Sintez kompensatorov dlya kombinirovannyh sistem avtomaticheskogo regulirovaniya, DonIZT, Donetsk, vol. 32, pp. 52-56.
6. Zhukova, N.V., Litvinov, V.I., Golikov V.V. (2012) Lineiny asinhronny reguliruemy elektroprivod s vozmojnostyu izmereniya elektpomagnitnogo momenta, Kiev, pp. 179-180.
Надійшла до редакції: Рецензент: 22.04.2014 д-р техн. наук, проф. Ткаченко В.М.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
13
О.О. Борисов ДВНЗ «Донецький національний технічний університет» Застосування FF- , FB- , MFC- AGC регуляторів в концепції управління приводами клітей прокатного стану за потужністю. Виконаний аналіз доцільності застосування FF- AGC, FB- AGC, MFC-AGC регуляторів у системах регулювання процесу холодного листопрокатування при управлінні головними приводами клітей прокатного стану за потужністю. Розглянуто концепцію комбінованого управління товщиною листа за збуренням за допомогою FF-AGC регулятора і міжклітьовим натягом по відхиленню за допомогою FB-AGC регулятора. MFC-AGC регулятор використовується як регулятор верхнього рівня, тому що він найбільш повно охоплює динаміку всього прокатного стану. Ключові слова: прокатний стан, гідравлічний натискний пристрій, математична модель, тиск, закон управління, передавальна функція. A.A. Borisov Donetsk National Technical University Application of FF-, FB-, MFC-AGC regulators in the concept rolling stands actuator contol by power. The analysis of different rolling mill control schemes showed that in the management of power for the main drives of the first stand the most effective is application of FF-AGC control of perturbation of thickness of the strip entering the cage acting as a function of the gauge readings before the cage in combination with the " rigid cage " control system of a hydropressure device. For the first stand it is necessary to provide effective compensation of the eccentricity of the rolls, since it is known that in the "rigid cage" eccentricity effect is most pronounced. We also need to provide compensation for the effect of speed and other disturbances defined by a particular production technology. The design principle of the first stand in this method requires regulatory minimum moment of inertia of the roll system, since this parameter determines the maximum value of the instantaneous power required to provide the required performance in the main drive control circuit. Thus minimizing the moment of inertia of the roller allows to reduce the peak power requirements of the electrical equipment and to determine the design lower limit. To stabilize the tension between the first and the next cage it is advisable to use FB-AGC controller because it reacts almost instantaneously to changes in the tension that is not possible when using the current control for stabilization of the plate thickness at the outlet of the cage with its direct measurement. So actually it is advisable to use combined control of sheet thickness by the perturbation and of interstand tension by the deviation. MFC-AGC controller in the control concept is expedient to use as a top-level controller, since it most fully encompasses the dynamics of the rolling mill and is the most flexible. This control law can be used as part of the reference model. Management model similar to the first stand is to be applied for the last stand of a multistand camp, but with the difference that here to stabilize the tension from the previous interstand cage with increasing thickness tackle it is necessary to accelerate the crate. Minimization roller inertia should also be presupposed. Keywords: rolling mill, hydraulic pressure device, mathematical model, pressure control law, transfer function.
Борисов Александр Алексеевич, Украина, закончил Донецкий политехнический институт, Донецкую государственную академию управления, канд. тех. наук, доцент кафедры автоматики и телекоммуникаций ГВУЗ «Донецкий национальный технический университет» (ул. Артема, 58, г. Донецк, 83001, Украина). Основные направления научной деятельности – автоматическое управление сложными технологическими процессами, идентификация систем, совершенствование устройств автоматики.
ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
© Воротникова З.Е., 2014 14
УДК 621.7-52
З.Е. Воротникова (канд. техн. наук) ГВУЗ «Приазовский технический университет», г. Мариуполь
кафедра автоматизации и компьютерных технологий e-mail: [email protected]
ФОРМИРОВАНИЕ И ИСПОЛЬЗОВАНИЕ АРХИВНОЙ БАЗЫ ДАННЫХ В СИСТЕМЕ «СОВЕТЧИК ОПЕРАТОРА ДОМЕННОЙ ПЕЧИ»
В статье изложены сведения о существующих системах поддержки принятия решений в доменном производстве и о разработанной автором методике формирования архивной базы данных, контролируемых технологических параметров доменной плавки. Структуризация данных проводится с целью применения для них методов интеллектуального анализа. Полученная из «сырых» данных информация о течении доменного процесса может быть использована при принятии управленческих решений в режиме реального времени. Изложена методика проведения анализа и оптимизации объема оперативной базы данных с целью прогнозирования течения доменной плавки в режиме реального времени. Ключевые слова: база данных, технологические параметры, интеллектуальный анализ данных, группирование параметров, оценка качества управления, критерий качества чугуна.
Постановка проблемы В соответствии с принятой классификацией доменная печь относится к разряду
уникальных технических объектов, обладающих сложной многоэлементной структурой [1]. Закрытость процесса, высокие температуры, отсутствие адекватных математических моделей и необходимость постоянного контроля текущего состояния доменного процесса, вынуждает технологов использовать косвенные методы диагностики. Следствием этого является оснащение доменных печей целым комплексом метрологического оборудования (число контролируемых параметров составляет несколько сотен). Полученные данные передаются на пульт управления в виде графиков изменения значений контролируемых параметров и сигнализацией критических зон. На основании этой информации технолог в реальном времени должен оценить состояние технологического процесса и принять решение о способе управления. Возможности человека по адекватному восприятию и оценке информации весьма ограничены, поэтому, разработка методов автоматической обработки и визуализации полученной с датчиков информации, является актуальной задачей.
На данный момент достаточно отработаны информационные системы доменного процесса, но роль субъективного фактора опытного оператора-технолога в управлении доменной печью является все еще ключевой. Среди существующих на доменных печах мира интегрированных компьютерных систем контроля и управления лишь некоторые включают в свои состав модельные системы управления технологическим режимом доменной плавки. Очень редко эти сложные системы оперативного управления доменным процессом тиражируются, так как для эффективной их эксплуатации они должны быть адаптированы к условиям работы конкретной печи.
К тому же, одна из главных проблем математического моделирования доменного процесса связана с разрешением противоречия между сложностью моделируемого процесса и необходимостью решения технологических задач в одном темпе с процессом за заданный интервал времени, с использованием реально имеющейся информации. Применение полных моделей доменного процесса, решить эту проблему, не позволяет [2].

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Oбчислювальна техніка та автоматизація №1 (26)’2014
15
В связи с этим, остаются актуальными системы поддержки принятия решений, работающие в режиме советчика оператора доменной печи.
Анализ последних исследований и публикаций Системы поддержки принятия решений и соответствующие им информационные
технологии появились в основном в 80-е годы, чему способствовали развитие теории моделирования, математики, в особенности численных методов решения, широкое распространение персональных компьютеров, пакетов прикладных программ. Эти системы нашли применение при поиске путей компенсации возмущений, влияющих на развитие основных процессов доменной плавки, и при решении задач минимизации затрат материальных и энергетических ресурсов на выплавку чугуна [2].
Модельные системы поддержки принятия решений применяются на третьем и четвертом уровнях АСУ ТП и представляют собой вид компьютерных информационных систем, помогающих лицу, принимающему решение, в принятии решении при наличии плохо структурированных задач посредством прямого диалога с компьютером с использованием данных и математических моделей.
В состав модельной системы поддержки принятия решений входят три главных компонента (см. рис. 1.): база данных; база моделей; система управления интерфейсом между пользователем и компьютером.
Рисунок 1 Основные компоненты модельной системы поддержки принятия решений
База моделей (комплекс различных моделей) используется для описания и
оптимизации процесса. Комплекс математических моделей является основой системы поддержки принятия решения. Пользователь имеет возможность получить недостающую ему информацию для принятия решения путем установления диалога с моделью, что облегчает выработку и оценку альтернатив решения. Система управления базой моделей (СУБМ) должна обладать следующими возможностями: создавать новые модели или изменять существующие, поддерживать и обновлять параметры моделей (осуществлять идентификацию параметров), манипулировать моделями.
Анализ особенностей построения математических моделей показал, что их адекватность реальным процессам зависит от степени изученности процессов. Поскольку параметрическая идентификация в реальных условиях по параметрам внутреннего состояния возможна лишь приближенно, ее производят по выходным параметрам (расход кокса, производительность, параметры чугуна и шлака и колошникового газа), что не позволяет дать однозначную оценку адекватности модели реальным процессам.
К настоящему времени верхний уровень управления АСУ ТП практически не реализован на доменных печах. В том числе, не отработаны модели, которые могут работать в режиме реального времени, оценивать достоверность собираемой информации и решать задачи интеллектуального уровня с использованием человеко-машинных интерфейсов.
Современные вычислительные средства дают возможность задействовать при принятии решений ресурсоемкие интеллектуальные технологии и получать из большого объема

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Oбчислювальна техніка та автоматизація №1 (26)’2014
16
накопленных данных о технологическом процессе полезную информацию в виде различных закономерностей. В связи с этим, разработка моделей хранения и обработки, накопленных объемов данных о технологических процессах, является актуальной задачей.
Цель статьи Разработка системы формирования и анализа архивной базы данных,
автоматизированной системы управления технологическим процессом выплавки чугуна, с целью оперативного использования при принятии решений.
Изложение основного материала Задача разрабатываемой системы состоит в структуризации и систематизации данных,
полученных в АСУ ТП. Проводится статистический анализ данных; прогнозирование хода плавки в реальном времени на основании анализа текущего состояния процесса и архивной БД; визуализация информации о возможном протекании технологического процесса на основании сделанного прогноза.
На первом этапе исследований рассматривались контролируемые параметры состояния технологического процесса выплавки чугуна при нормальном ходе печи. Данные поступают с датчиков контроля технологических параметров, установленных на доменной печи, на сервер АСУ ТП.
В системе контролируются следующие параметры: температуры холодного и горячего дутья, колошникового газа в газоотводах и по
радиусу колошника, огнеупорной кладки печи и ее фундамента, поступающей и отходящей из охладительной арматуры воды и воздуха, охлаждающего лещадь, купола воздухонагревателя и продуктов горения, отходящих из воздухонагревателя;
давление холодного и горячего дутья, давление газа на колошнике, перепады давления газа в нижней, средней и верхней части шахты, природного газа, воды, поступающей в охладительную арматуру, пара;
расход дутья, природного газа, кислорода, подаваемого в печь на каждую фурму; состав колошникового газа, продуктов горения воздухонагревателей, содержание в
дутье кислорода, влажность дутья; уровень шихтовых материалов в печи; число подач, загруженных в печь, число скипов в подаче, угол поворота вращающегося
распределителя шихты; масса и химический состав агломерата, кокса и добавок к каждой подаче.
Эти данные достаточно полно характеризуют текущее состояние системы, которое зависит от предыдущего состояния и управляющих воздействий. Управляющие воздействия, в свою очередь складываются из качества и способа загрузки шихтовых материалов, состава и режима дутья, времени слива чугуна и шлака.
Способ загрузки шихтовых материалов, их количество и состав определяют регулирование доменного процесса сверху. Возможность изменения параметров шихтовых материалов в широких пределах отсутствует — работа ведется с теми материалами, которые поступают. Существует возможность «доводки» материалов с помощью различных добавок (известняк, богатые рудой присадки). Качественные и количественные характеристики шихтовых материалов оцениваются технологами по мере прихода сырья и формирования подач, на основе проведенных на предприятии анализов.
Оценка состояния технологического процесса проводится при помощи статистических характеристик временных рядов контролируемых технологических параметров, которые рассчитываются для каждого цикла плавки. В качестве цикла плавки выбрано время от начала слива чугуна до следующего слива. Для анализа состояния технологического процесса был определен репрезентативный набор из 26 параметров. Список параметров определяется технологическими специалистами и может изменяться по ходу наработки системы с целью уточнения общих характеристик.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Oбчислювальна техніка та автоматизація №1 (26)’2014
17
Данные, поступают на сервер с контроллеров каждые 3 секунды. Временные ряды значений контролируемых параметров, полученные за цикл плавки, сглаживаются (например: с помощью экспоненциального алгоритма с выбором оптимального параметра [3]), аппроксимируются (например: на базе модулированных гармоник Фурье [4]) и их модели хранятся в базе данных. Так как обработка данных в виде моделей требует большого объема вычислительной работы и, следовательно, машинного времени, что затрудняет использование их в системах реального времени, модели задействуются лишь на этапе визуализации результатов прогноза.
В базу данных для каждого цикла плавки записываются значения «характерных показателей» для временных рядов контролируемых технологических параметров. Набор таких показателей должен обеспечивать формирование критериев подобия (близости) циклов плавки или отличия.
В качестве «характерных показателей» могут быть выбраны следующие статистические характеристики временных рядов технологических параметров [5]: среднеквадратичное отклонение контролируемых параметров от их математического ожидания; смещение математического ожидания от нормативного значения; вероятности отклонения контролируемой величины в определенный момент времени от ее математического ожидания на нормативное значение; относительное числу отклонений контролируемой величины, находящихся в фиксированной области или соответствующее время; максимальное непрерывное время нахождения значений в некоторой области; суммарное непрерывное время нахождения контролируемого параметра в некоторой области дольше заданного порога.
Выбор вида «характерного показателя», для каждого контролируемого параметра должен осуществляться экспертом исходя из накопленного опыта. В зависимости от нормативного характера поведения конкретного контролируемого параметра или группы параметров, строится частный критерий качества регулирования как взвешенная аддитивная свертка, включающая один или несколько видов статистических характеристик [6]. Так как в качестве «характерных показателей» выступают величины, показывающие степень отклонения контролируемого параметра от желаемого, следовательно, чем меньше значения частных критериев, тем лучше реализовано управление технологическим процессом. При проведении экспериментов с системой были использованы нормативные данные из технологической инструкции и рекомендации обслуживающего персонала домны №2 МК «Азовсталь» г. Мариуполя.
Частные критерии качества регулирования по каждому технологическому параметру рассчитываются динамически и их значения записываются в БД в контрольных точках в течение каждого цикла плавки. Предусмотрена возможность задания контрольных точек (например: каждые 10 минут). В каждой контрольной точке качество управления по каждому технологическому параметру рассчитывается по следующим выборкам: суточной (24 часа), за смену (8 часов), за цикл плавки, за час, за 30 минут, за 15 минут, за 5 минут
В БД (см. рис. 2) также записываются данные по каждому циклу плавки о качестве выплавленного чугуна, полученные из лаборатории [7]: В лаборатории контролируются следующие параметры: общий вес чугуна при сливе; содержание кремния в чугуне (%); содержание марганца в чугуне(%); содержание серы в чугуне(%); содержание фосфора в чугуне(%); основность чугуна (отношение содержания оксида кальция к кремнию); содержание титана в чугуне (%); температура чугуна (ºС); содержание оксида магния в шлаке(%); содержание оксида алюминия в шлаке (%).
Сформированная, выше описанным способом, БД хранит достаточно полную информацию о технологическом процессе и может использоваться в оперативном режиме для принятия решений в ходе управления.
Обработка информации о технологическом процессе происходит в несколько этапов:
ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Oбчислювальна техніка та автоматизація №1 (26)’2014
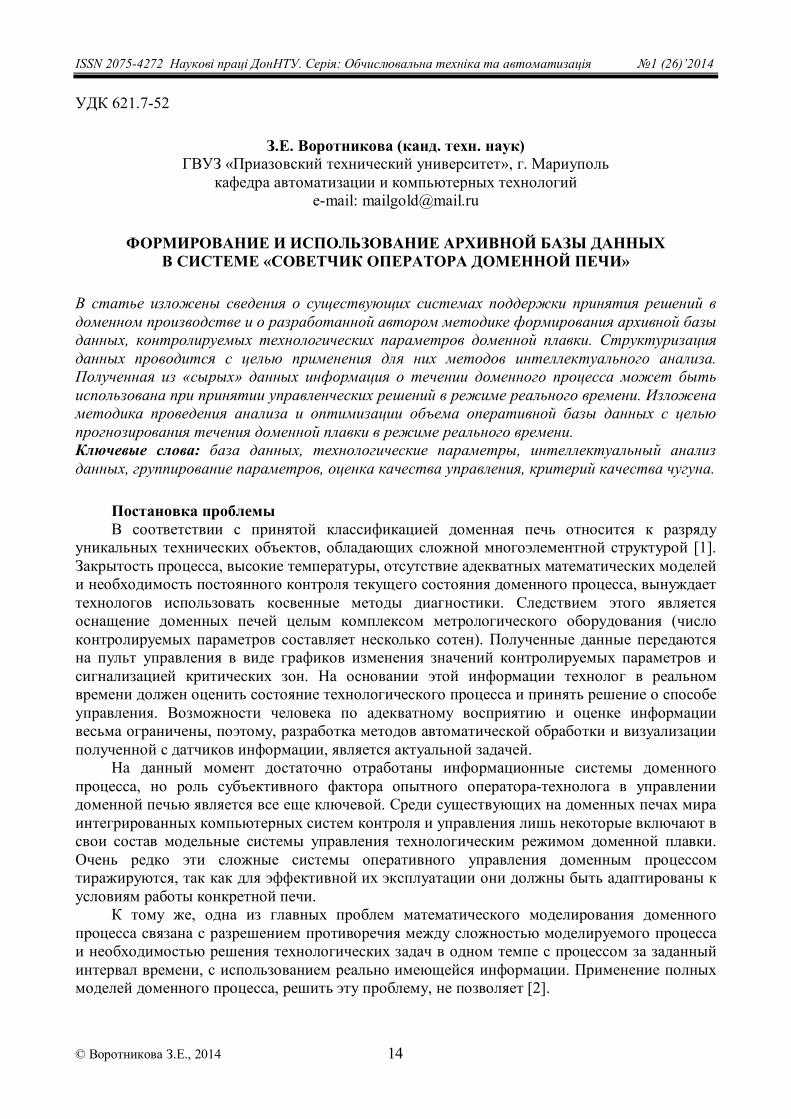
18
формирование БД характерных параметров для каждого цикла плавки; обработка записей БД – группирование циклов плавок и запись в БД номера
материнской и дочерней плавки; формирование записи для текущего цикла плавки. Динамический расчет характерных
параметров и запись их в БД; прогноз, по мере поступления новых данных, о принадлежности цикла плавки к
некоторому классу; выбор из спрогнозированного класса «лучшего», «худшего» и «типичного» циклов
плавки из некоторой окрестности текущего цикла; визуализация возможных сценариев развития событий; перегруппирование циклов плавок в БД по мере поступления новой информации; оценка качества прогноза; оптимизация состава БД (расчет степени типичности записей и удаление шумовых и
неинформативных).
Рисунок 2 – Схема данных
Формирование записи в БД для текущего цикла плавки ведется динамически по мере
получения необходимой информации. При этом, через некоторые промежутки времени, в имеющейся БД проводится поиск циклов, некоторым образом «схожих» с текущим, и выводятся данные о режимах управления для лучшего и худшего сценария развития событий. Данные о текущем цикле плавки на этом этапе являются не полными: часть данных (например: о шихтовых материалах и режимах дутья) могут быть сформированы до начала цикла и в процессе лишь корректироваться, часть (например: о выплавленном чугуне)– будут известны лишь после окончания цикла, а основная часть – вычисляется динамически по мере получения данных, что создает сложности на стадии идентификации плавки. Каждый последующий прогноз будет более точным, т.к. он использует более полные данные о ходе плавки.
Очевидно, что решение указанной задачи существенно облегчается, если предварительно сгруппировать записи БД в группы, содержащие циклы плавки, в определенном смысле близкие по структуре. Для решения этой вспомогательной задачи

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Oбчислювальна техніка та автоматизація №1 (26)’2014
19
можно использовать известные методы кластеризации, такие, как перегруппированная кластеризация (relocation clustering), агломеративная иерархическая кластеризация, метод k-среднего, метод нечеткого c-среднего и другие [8, 9].
При проектировании системы, для решения этой задачи использовалась иерархическая кластеризация (метод Ланса-Уильямса), которая не требует задания исходного числа кластеров, а позволяет найти их в процессе выполнения процедуры кластеризации. Была выбрана формула Варда и Евклидова метрика [10], «характерные показатели» предварительно нормировались (см. рис.3).
Рисунок 3 – Дендрограмма групп для фрагмента БД (за 20 суток)
Отдельно проводится группирование циклов плавки по качеству и температуре
выплавленного чугуна и шлака. Эти данные используются при настройке порогов для разделения множества циклов плавки на классы.
По результатам кластеризации для каждого цикла плавки в БД вносятся данные о том, к какому классу он принадлежит, и к какому классу отнесен предшествующий цикл. По мере формирования данных о текущем цикле в каждой контрольной течке, независимо, проводится прогнозирование принадлежности цикла к некоторому классу с использованием метрической классификации. Притяжение осуществляется к тому кластеру расстояние от объекта до центра масс которого, наименьшее.
В качестве прогнозного значения выбирается класс, наиболее часто встречающийся в предшествующих контрольных точках текущего цикла. Данные о прогнозе записываются во вспомогательную таблицу и используются для оценки качества прогнозирования. Качество прогноза напрямую зависит от представительности данных в БД. В таблице приведены данные о качестве прогноза на модельной БД.
Таблица 1 Количество правильно классифицированных объектов в каждой контрольной точке (%)
Номер контрольной точки Номер класса 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
1 40 43 56 55 59 62 68 75 77 87 87 88 90 92 95 96 2 65 55 60 67 68 67 69 73 76 78 90 91 91 93 93 97 3 90 90 91 90 91 92 91 93 94 94 93 95 95 97 97 97 4 65 66 66 65 68 67 70 77 79 85 86 86 90 92 94 95 5 70 77 81 80 82 82 81 88 89 89 88 90 91 92 92 95

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Oбчислювальна техніка та автоматизація №1 (26)’2014
20
Для каждой контрольной точки по результатам прогноза выбираются «лучший», «худший» и «типичный» циклы, которые выводятся на экран. «Лучший» и «худший» циклы выбираются в зависимости от величины критерия качества чугуна по спрогнозированной группе (чем меньше критерий качества, тем «лучше» цикл). «Типичный» цикл – выбирается случайным образом по гистограмме из диапазона значений критериев качества чугуна, в который попало наибольшее количество циклов.
Для расчета качества чугуна используются данные о химическом составе чугуна и шлака полученные из лаборатории и хранящиеся в БД. Критерий качества вводится, как расстояние от точки, образованной нормированными значениями параметров, характеризующих химический состав чугуна для заданного цикла плавки до центра диапазонов норм по химическому составу для чугуна необходимого качества.
),( axK ii , (1) где a – координаты центра диапазонов нормы параметров качества чугуна;
ix – координаты i-го цикла плавки в пространстве параметров качества чугуна. Каждые сутки рассчитывается качество группирования циклов в БД по формуле [8]:
max),(1:
20
yyiii
Yy y i
xK
Ф , (2)
где yyXxK il
iy - кластер у,
i - центр масс кластера у.
max),(21
YyyФ , (3)
где - центр масс всей выборки у. min/ 10 ФФФ . (4)
Если качество группирования ухудшается более чем на 10 % (параметр может регулироваться) агломеративная иерархическая процедура группирования запускается снова, чтобы уточнить границы классов.
Для улучшения качества классификации и уменьшения объема обрабатываемой БД целесообразно вести идентификацию циклов плавки как эталонных, не информативных и шумовых в виде соответствующего маркера [10]. Эталоны – это типичные представители классов, неинформативные объекты – плотно окружены другими объектами того же класса, шумовые – находятся в толще чужого класса. Удаление шумовых объектов из БД, исключение из обработки неинформативных объектов и перебор только минимального достаточного количества эталонов, позволяет повысить качество устойчивости классификации, сократить объём обрабатываемых данных и уменьшить время классификации (алгоритм STOLP [11]). Кроме того, выделение небольшого числа эталонов в каждом классе позволяет лучше понять структуру класса.
Степень типичности объекта (насколько глубоко он погружен в свой класс) показывает отступ – равный разности суммарного веса объектов своего класса в некоторой окрестности и максимального суммарного веса объектов из других классов в этой окрестности, вес пропорционален расстоянию до объекта.
)(max)()(\
iyyYy
iyi xГxГxMi
i , (5)
где )( iy xГi
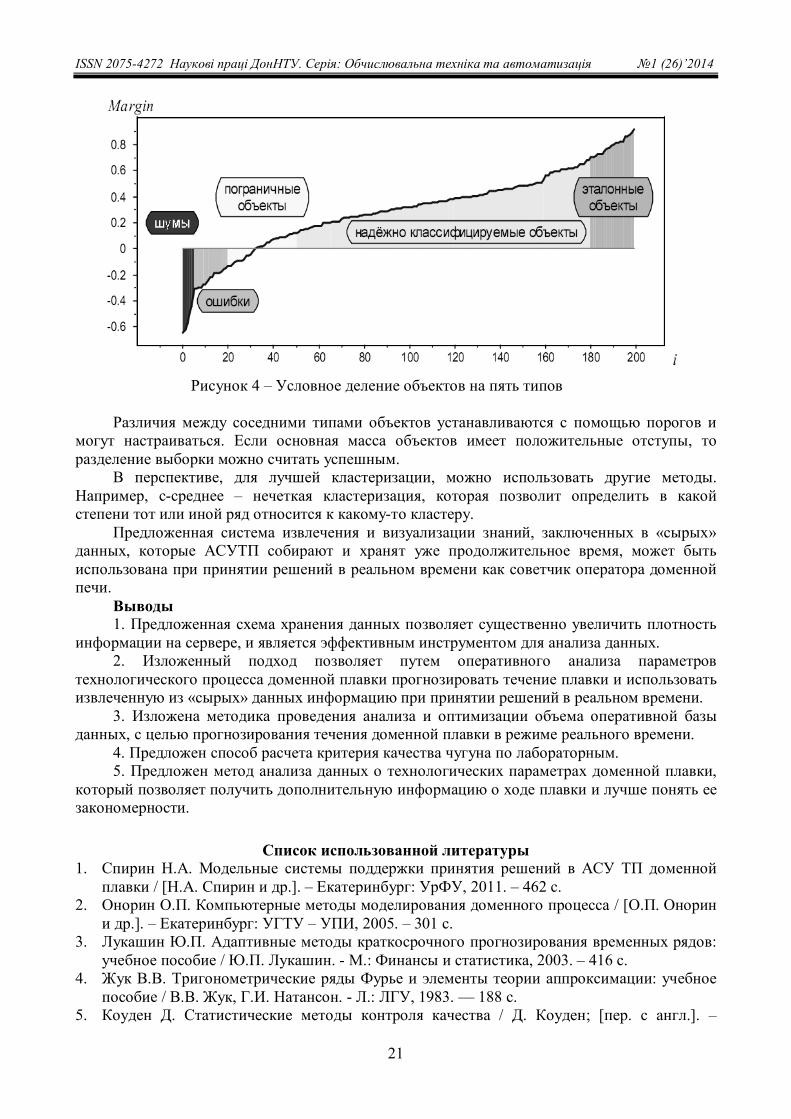
- оценка близости объекта ix к классу iy . В зависимости от значений отступа обучающие объекты условно делятся на пять типов,
в порядке убывания отступа: эталонные, неинформативные, пограничные, ошибочные, шумовые (см. рис. 4).
ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Oбчислювальна техніка та автоматизація №1 (26)’2014
21
Рисунок 4 – Условное деление объектов на пять типов
Различия между соседними типами объектов устанавливаются с помощью порогов и
могут настраиваться. Если основная масса объектов имеет положительные отступы, то разделение выборки можно считать успешным.
В перспективе, для лучшей кластеризации, можно использовать другие методы. Например, c-среднее – нечеткая кластеризация, которая позволит определить в какой степени тот или иной ряд относится к какому-то кластеру.
Предложенная система извлечения и визуализации знаний, заключенных в «сырых» данных, которые АСУТП собирают и хранят уже продолжительное время, может быть использована при принятии решений в реальном времени как советчик оператора доменной печи.
Выводы 1. Предложенная схема хранения данных позволяет существенно увеличить плотность
информации на сервере, и является эффективным инструментом для анализа данных. 2. Изложенный подход позволяет путем оперативного анализа параметров
технологического процесса доменной плавки прогнозировать течение плавки и использовать извлеченную из «сырых» данных информацию при принятии решений в реальном времени.
3. Изложена методика проведения анализа и оптимизации объема оперативной базы данных, с целью прогнозирования течения доменной плавки в режиме реального времени.
4. Предложен способ расчета критерия качества чугуна по лабораторным. 5. Предложен метод анализа данных о технологических параметрах доменной плавки,
который позволяет получить дополнительную информацию о ходе плавки и лучше понять ее закономерности.
Список использованной литературы 1. Спирин Н.А. Модельные системы поддержки принятия решений в АСУ ТП доменной
плавки / [Н.А. Спирин и др.]. – Екатеринбург: УрФУ, 2011. – 462 с. 2. Онорин О.П. Компьютерные методы моделирования доменного процесса / [О.П. Онорин
и др.]. – Екатеринбург: УГТУ – УПИ, 2005. – 301 с. 3. Лукашин Ю.П. Адаптивные методы краткосрочного прогнозирования временных рядов:
учебное пособие / Ю.П. Лукашин. - М.: Финансы и статистика, 2003. – 416 с. 4. Жук В.В. Тригонометрические ряды Фурье и элементы теории аппроксимации: учебное
пособие / В.В. Жук, Г.И. Натансон. - Л.: ЛГУ, 1983. — 188 с. 5. Коуден Д. Статистические методы контроля качества / Д. Коуден; [пер. с англ.]. –

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Oбчислювальна техніка та автоматизація №1 (26)’2014
22
М.: Физматлит, 1961. – 623 с. 6. Воротникова З. Е. Система операционного контроля качества чугуна в процессе плавки /
З. Е. Воротникова, М. А. Новосельцев // Вісник Приазовського державного технічного університету : зб. наукових праць. - 2013. - Вип. 26. - С. 221-227.
7. Технологическая инструкция. Производство чугуна: ТИ 232-1-2007 / ОАО «МК «Азовсталь». – Мариуполь, 2007. – 73 с.
8. Айвазян С. А. Прикладная статистика: Классификация и снижение размерности / [С. А. Айвазян и др.]. - М.: Финансы и статистика, 1989. - 607 с.
9. Вятченин Д. А. Нечёткие методы автоматической классификации / Д. А. Вятченин. - Минск: Технопринт, 2004. - 219 с.
10. Профессиональный информационно-аналитический ресурс [Электронный ресурс] // Ведется при поддержке РФФИ и компании Forecsys. - Режим доступа: http://www.MachineLearning.ru.
11. Загоруйко Н. Г. Прикладные методы анализа данных и знаний / Н. Г. Загоруйко. - Новосибирск: ИМ СО РАН, 1999. - 270 с.
References 1. Spirin, N.A., Lavrov, V.V., Rybolovlev, V.YU., Krasnobaev, A.V., Onorin, O.P.
and Kosachenko I.E. (2011), Model'nye sistemy podderzhki prinyatiya reshenii v ASU TP domennoj plavki [The model systems of support of making decision are in АСУ of ТП of the domain melting], UrFU, Ekaterinburg, Russia.
2. Spirin, N.A. (ed.) (2005), Komp'yuternye metody modelirovaniya domennogo processa [Computer methods of design of domain process], UGTU – UPI, Ekaterinburg, Russia.
3. Lukashin, YU.P. (2003), Adaptivnye metody kratkosrochnogo prognozirovaniya vremennyh ryadov: uchebnoe posobie [Adaptive Methods of a time series short-term forecasting: teaching aid], Finansy i statistika, Moscow, Russia.
4. ZHuk, V.V. and Natanson, G.I. (1983), Trigonometricheskie ryady Fur'e i e'lementy teorii approksimacii [Trigonometric rows of Fourier and elements of theory of approximation], LGU, Leningrad, Russia.
5. Cowden, D. J. (1961), Statisticheskie metody kontrolya kachestva [Statistical Methods in Quality Control], Translated by Bruhanskoj, O.V., Solovejchika, F.S., Trofimova, K.N. in Levin, B.R. (ed.), Fizmatlit, Moscow, Russia.
6. Vorotnikova, Z. E. and Novosel'cev, M. A. (2013), “Operating checking of quality of cast-iron system in the process of melting”, Bulletin of the priazovskyi state technical university: collection of scientific works, vol. 26, no. Technical sciences, pp. 221-227.
7. PJSC “AZOVSTAL IRON & STEEL WORKS” (2007), TI 232-1-2007: Technological instruction: Ironmaking, PJSC “AZOVSTAL IRON & STEEL WORKS”, Mariupol, Ukraine.
8. Ajvazyan, S.A., Buhtshtaber, V.M., Enyukov, I.S. and Meshalkin, L.D. (1989), Prikladnaya statistika: Klassifikaciya i snizhenie razmernosti [Is Applied statistics: Classification and decline of dimension], Finansy i statistika, Moscow, Russia.
9. Vyatchenin, D. A. (2004), Nechyotkie metody avtomaticheskoj klassifikacii [Unclear methods of automatic classification], Tehnoprint, Minsk, Belarus.
10. Professional research and information resource (2011), “Computer-aided instruction, recognition of patterns and intellectual analysis of data”, available at: http://www.MachineLearning.ru (Accessed 4 April 2014).
11. Zagorujko, N. G. (1999), Prikladnye metody analiza dannyh i znanii [The Applied methods of analysis of data and knowledge], IM SO RAN, Novosibirsk, Russia.
Надійшла до редакції: Рецензент: 24.04.2014 канд. техн. наук, проф. Маренич К.М.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Oбчислювальна техніка та автоматизація №1 (26)’2014
23
З.Є. Воротнікова ДВНЗ «Приазовський технічний університет» Формування та використання архівної бази даних у системі «Радник оператора доменної печі». У статті викладені відомості про існуючі системи підтримки ухвалення рішень в доменному виробництві і про розроблену автором методику формування архівної бази даних, контрольованих технологічних параметрів доменної плавки. Структуризація даних проводиться з метою застосування для них методів інтелектуального аналізу. Отримана з «сирих» даних інформація про протікання доменного процесу може бути використана при ухваленні управлінських рішень в режимі реального часу. Викладена методика проведення аналізу і оптимізації об'єму оперативної бази даних з метою прогнозування протікання доменної плавки в режимі реального часу. Ключові слова: база даних технологічних параметрів, інтелектуальний аналіз даних, оцінювання якості керування, групування.
Z. Ye. Vorotnikova Priazovsky Technical University Forming and use of an archived database in the system “Adviser of a blast furnace operator”. The article provides information about the existent systems of support of decision making in blast-furnace production and about the methodology of forming the archived database, controlled technological parameters of blast-furnace melting. Data structuring is conducted with the purpose of application of methods of intellectual analysis of data. The information obtained from "raw" data about the melting process can be used for making administrative decisions in real-time. Methodology of realization of analysis and optimization of volume of operative database is expounded with the purpose of prognostication of melting in real-time. A method of calculation of the criterion of quality of cast-iron by laboratory data and method of its use for tuning of thresholds in the agglomeration procedure of grouping of values of "Characteristic indexes" of the controlled parameters of the blast-furnace melting is offered. Keywords: database, technological parameters, intellectual analysis of data, grouping of parameters, estimation of management quality, criterion of quality of cast-iron.
Воротникова Злата Евгеньевна, Украина, закончила Харьковский национальный политехнический университет, канд. тех. наук, доцент кафедры автоматизации и компьютерных технологий ГВУЗ «Приазовский технический университет» (ул. Университетская 7, г. Мариуполь, 87557, Украина). Основное направление научной деятельности – интеллектуальный анализ данных, моделирование и управление технологическими процессами в промышленности.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
© Суздаль В.С., Тавровский И.И., Соболев А.В., Кобылянский Б.Б., 2014 24
УДК 621.3.078.3+681.543
В.С. Суздаль ( д-р техн. наук, ст. науч. сотр.), И.И. Тавровский ( канд. техн. наук), А.В. Соболев ( канд. техн. наук), Б.Б. Кобылянский ( канд. техн. наук)
«Институт сцинтилляционных материалов» НАН Украины, г. Харьков лаборатория систем управления e-mail: [email protected]
СИСТЕМА С ПАРАМЕТРИЧЕСКОЙ ИНВАРИАНТНОСТЬЮ ДЛЯ ПРОЦЕССОВ КРИСТАЛЛИЗАЦИИ
Проведен синтез системы с параметрической инвариантностью выхода для управления процессом выращивания монокристалла. Показано, что синтезированная система управления в состоянии подавлять возмущения характерные для ростовых систем. Ключевые слова: инвариантные системы, ростовые системы, синтез регуляторов.
Общая постановка проблемы Решение задачи инвариантности подразумевает определение такой структуры и
параметров системы управления, при которых качество функционирования системы не зависит от возмущений. В [1] получены необходимые и достаточные условия инвариантности по выходу для линейных стационарных динамических систем к произвольным внешним возмущениям.
Процессы выращивания крупногабаритных сцинтилляционных монокристаллов относятся к классу многомерных многосвязных объектов управления (ОУ), параметры которых в условиях промышленного производства подвержены изменениям. Поэтому для процессов кристаллизации необходима система управления, которая обеспечивает сохранение основных ее характеристик при изменении параметров объекта управления в достаточно широких пределах, т.е. системы с параметрической инвариантностью [2].
Постановка задачи синтеза регулятора Пусть задана математическая модель объекта управления в пространстве состояний в
виде линейной стационарной системы без запаздывания и ограничений на управление ,)0(),()()()( 0xxtwtButAxtx (1)
)()( tCxty . (2)
где nRtx )( – n-мерный вектор состояния системы, lRtu )( – l-мерный вектор управления
и mRty )( – m-мерный вектор контролируемых координат, sRtw )( – s-мерный вектор возмущений. Компоненты вектора w принадлежат к классу произвольных непрерывных функций.
Реализацию в пространстве состояний (1), (2) обозначим четверкой матриц (A, B, C, ) соответствующих размеров с постоянными числовыми элементами.
Введем в рассмотрение регулятор )(tKxu , (3)
где К – постоянная матрица коэффициентов усиления. Пусть BKA , где A и B – параметрические возмущения матриц А и В
соответственно. Известно, что система (1) – (3) обладает параметрической инвариантностью выхода к параметрическим возмущениям , если выполняется тождество
110 )()()( BKApICBKApICpW nny , (4)
где )(0 pWy – передаточная матрица от начальных условий к выходу.
ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Oбчислювальна техніка та автоматизація №1 (26)’2014
25
Задача синтеза регулятора заключается в определении условий существования и описания всех регуляторов, обеспечивающих выполнение тождества (4) при фиксированных
матрицах A, B, C и . Если обозначить через LM ,
RM и M~ левый и правый делители нуля и
сводный канонизатор максимального ранга для некоторой матрицы М [3], то эти условия определяются следующим выражением для соответствующих матриц [1]
0LRC , (5)
где – матрица максимального столбцового ранга, удовлетворяющая условию
0RLR
LLRCACBC (6)
и система замкнута любым регулятором из множества LR
LLRRRLRLR CBCCCACBCK )~()~(}{ , (7) где и – матрицы заданных размеров с произвольными числовыми элементами.
Алгоритм формирования матрицы максимального ранга, удовлетворяющую условию (6) приведен в [1]:
1. Проверяется условие
0RL
CCACB . (8) Если это условие выполняется, то принимается )(0 rankCnI .
2. Если условие (8) не выполняется, то определяется матрица RRL CCACB1 .
Если 01 , то система не обладает инвариантностью, а алгоритм останавливается. В противном случае проверяется условие (6) при 1 .
3. Если условие (6) на предыдущем шаге не выполняется, то i увеличивается на единицу и определяется матрица i–й итерации.
R
RL
iR
LL
iR
i CACBC 11 . (9) Если 0i , то система не обладает инвариантностью, а алгоритм останавливается. В
противном случае проверяется условие (6) при i . 4.Алгоритм останавливается на к-ом шаге при первом выполнении условия (6).
Матрица максимального ранга имеет значение k . Регулятор для процесса выращивания Моделирование процесса выращивания, как объекта управления, проводилось на
примере получения крупногабаритных активированных монокристаллов GsJ методом Чохральского. Процесс выращивания рассматривался как двумерный линейный стационарный объект управления с двумя входными величинами – температура Td основного и температура Tb дополнительного нагревателя и двумя выходами – диаметр кристалла Ds и температура подпиточного расплава Tp [4].
Модель ОУ в пространстве состояний имеет следующие матрицы
124.35.00044322.0000300453.51200548.1014321
xxxx
xxxx
A ,

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Oбчислювальна техніка та автоматизація №1 (26)’2014
26
8284.0699.143939.02915.03573.52637.02142.25019.0121
xxxx
uu
B ,
20002004014321
yy
xxxxC .
Модель ОУ устойчива, полностью управляема и наблюдаема. Условие (5) выполняется на первом шаге для )2(I . Так как для рассматриваемого
ОУ 0
LLRBC , то из (7) находим класс регуляторов по выражению
LRRRLRLR CCCACBCK )~()~( .
К=
22211211
00136.001754.002877.000855.0
1000
0010 .
Если выбрать 00;977.069.5 , то получим конкретную реализацию регулятора
К=
00136.001754.09770.02877.0690.50855.0 .
Переходной процесс в замкнутой системе с регулятором К по каналу: температура Td основного нагревателя – диаметр кристалла Ds приведен на рисунке 1.
0 2 4 6 8 10 12 14 16 180
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1Step Response
Time (sec)
Ampl
itude
Рисунок 1 – Переходной процесс в замкнутой системе по каналу: температура Td основного нагревателя – диаметр кристалла Ds
Длительность переходного режима для замкнутой системы – 5 секунд. Это стандартное
отображение качества управления для инерционных ОУ, какими является процесс выращивания крупногабаритных монокристаллов, позволяет сделать вывод, что синтезированный регулятор может быть использован для управления выращиванием активированных монокристаллов.
Множество параметрических возмущений , для которых при любом регуляторе из множества (7) обеспечивается параметрическая инвариантность, определяется выражением
RC , (10)
где – матрица соответствующего размера с произвольными числовыми элементами.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Oбчислювальна техніка та автоматизація №1 (26)’2014
27
Для рассматриваемого ОУ имеем R
C =[0 1;0 0;1 0;0 0], т.е. в синтезированной системе подавляются параметрические возмущения, определяемые матрицей
0000
0000
00010010
14131211
24232221
2423222114131211
. (11)
Выводы В системах выращивания крупногабаритных монокристаллов методом Чохральского
параметры объекта управления подвержены изменениям при изменении условий выращивания, а также с течением времени, что можно интерпретировать как параметрические возмущения в системе. Проведен синтез системы с параметрической инвариантностью выхода для управления процессом выращивания. Синтезированная система управления, как показывает выражение (11), в состоянии подавлять такие возмущения при соответствующем выборе матрицы .
Список использованной литературы 1. Буков В.Н. Условия инвариантности выхода линейных систем / В. Н. Буков, А. М.
Бронников // Автоматика и телемеханика. – 2005. – №2. – С.21–35. 2. Рост кристаллов / [В. И. Горилецкий, Б. В. Гринев, Б. Г. Заславский и др.]. – Харьков:
АКТА, 2002. – 535 с. 3. Решение матричных уравнений методом канонизации / [В.Н. Буков, В.Н. Рябченко, В.В.
Косъянчук, Е.Ю. Зыбин] // Вестник Киевского ун-та. Сер. Физ.-мат. науки. – 2002. – Вып. 1. – С. 19-28.
4. Параметрическая идентификация VARMAX моделей процесса кристаллизации крупногабаритных монокристаллов / [В. С. Суздаль, Ю. М. Епифанов, А. В. Соболев, И. И. Тавровский] // Нові технології: науковий вісник Кременчуцького університету економіки, інформаційних технологій і управління. – 2009. – №4(26). – С. 23–29.
References 1. Bukov, V.N. and Bronnikov, A.M., (2005), “Invariance condition of output linear systems”,
Avtomatika i telemehanika, no. 2, pp. 21–35. 2. Gorileckij, V.I., Grinev, B.V. and Zaslavskij, B.G. (2002), Rost kristallov [Crystal Growth],
AKTA, Har'kov, Ukraine. 3. Bukov, V.N., Rjabchenko, V.N. and Zybin, E.Ju. (2002), “Solution of matrix equations by
canonization”, Vestnik Kievskogo un-ta. Ser. Fiz..-matem. Nauki, no. 1, pp. 19-28. 4. Suzdal, V.S., Epifanov, Ju.M. and Tavrovskij, I.I. (2009), “Parametric identification VARMAX
models crystallization process large single crystals”, Novі tehnologії. Naukovij vіsnik Kremenchuc'kogo unіversitetu ekonomіki, іnformacіjnih tehnologіj і upravlіnnja, no. 4(26), pp. 23–29.
Надійшла до редакції: Рецензент: 20.05.2014 канд. техн. наук, проф. Маренич К.М.
В.С. Суздаль, І.І. Тавровський, О.В. Соболєв, Б.Б. Кобилянський «Інститут сцинтиляційних матеріалів» НАН України Система з параметричною інваріантністю для процесів кристалізації. Проведено синтез системи з параметричною інваріантністю виходу для управління процесом вирощування

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Oбчислювальна техніка та автоматизація №1 (26)’2014
28
монокристалів. Синтезована система управління в стані пригнічувати збурення, що в цілому характерні для ростових систем. Ключові слова: інваріантні системи, ростові системи, синтез регуляторів.
V. Suzdal, I. Tawrovskiy, O. Sobolev, B. Kobilyanskiy Institute for Scintillation Materials, NAS of Ukraine System with parametric invariance for crystallization processes. The synthesis of system for control process of crystal growth with parametric invariance of the output variable was carried out. The synthesized control system is able to suppress the disturbances generally typical of growing plants. Keywords: invariance system, system for growing crystals, synthesis of regulators.
Суздаль Виктор Семенович, Украина, закончил Харьковский политехнический институт, доктор технических наук, старший научный сотрудник, заведующий лабораторией систем управления «Института сцинтилляционных материалов» НАН Украины (просп. Ленина, 60, г. Харьков, 64001, Украина). Основное направление научной деятельности – идентификация, моделирование и развитое управление технологическими процессами. Тавровский Игорь Игоревич, Украина, закончил Харьковский авиационный институт, кандидат технических наук, научный сотрудник лаборатории систем управления «Института сцинтилляционных материалов» НАН Украины (просп. Ленина, 60, г. Харьков, 64001, Украина). Основное направление научной деятельности – программно-аппаратные комплексы для управление технологическими процессами. Соболев Александр Викторович, Украина, закончил Харьковский национальный университет радиоэлектроники, кандидат технических наук, научный сотрудник лаборатории систем управления «Института сцинтилляционных материалов» НАН Украины (просп. Ленина, 60, г. Харьков, 64001, Украина). Основное направление научной деятельности – идентификация и моделирование процессов кристаллизации. Кобылянский Борис Борисович, Украина, закончил Украинскую инженерно-педагогическую академию, кандидат технических наук, доцент, кафедра электроники и компьютерных технологий систем управления (ул. Носакова 9а, г. Артемовск, 84500, Украина). Основное направление научной деятельности – моделирование и управление современными технологическими процессами.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
© Лапта C.C., Масолова Н.В., Зиновьева Я.В., 2014 29
УДК 531.1
C.C. Лапта (канд. техн. наук, доц.), Н.В. Масолова (канд. физ.-мат. наук, доц.), Я.В. Зиновьева (канд. физ.-мат. наук)
Учебно-научный профессионально педагогический институт ГВУЗ «Украинская инженерно педагогическая академия», г. Артемовск кафедра электроники и компьютерных технологий систем управления,
ГВУЗ «Харьковский национальный университет радиоэлектроники» г. Харьков кафедра микроэлектроники, электронных приборов и устройств
ГВУЗ «Донецкий национальный технический университет», г. Донецк кафедра высшей математики им. В.В. Пака
e-mail: [email protected], [email protected], [email protected]
РАЗВИТИЕ ТЕОРИИ МОДЕЛИРОВАНИЯ ПЕРЕХОДНОГО ПРОЦЕССА В СЛОЖНОЙ ГОМЕОСТАТИЧЕСКОЙ СИСТЕМЕ
Статья посвящена развитию теории математического моделирования реальных сложных систем с недостаточной структурированностью, обладающих гомеостатическим свойством с локальным последействием на примере наиболее исследованной на концептуальном уровне физиологической системы регуляции углеводного обмена. Предложен новый подход, который отличается тем, что структурная идентификация сложной гомеостатической системы проводится в функциональном аспекте. Получены новые математические модели, улучшены методы и средства математического компьютерного моделирования, а также вычислительные методы. Ключевые слова: математические модели, гомеостаз, медицинская диагностика, дифференциальные уравнения с запаздывающим аргументом.
Введение Широкая распространенность в различных областях природы, техники и общественных
отношений сложных динамических систем, наиболее важным свойством которых является гомеостатическое самосохранение равновесных состояний, обусловила актуальность их эффективного математического описания [1, 2]. Однако в большинстве случаев детальное структурирование таких систем или недостижимо на современном уровне развития науки, или является просто нецелесообразным. При этом оба предложенных до последнего времени подхода к их математическому моделированию оказались неудовлетворительными: поверхностный функциональный - является недостаточным для решения многих теоретических и практических задач, номинально содержательный структурно функциональный - неэффективен вследствие гипотетичности и громоздкости. Поэтому возникла проблема разработки нового подхода к математическому моделированию гомеостатических систем, в определенном смысле промежуточного между этими двумя подходами (подобного физическому макроскопическому подходу), который, как можно полагать, позволит объединить их преимущества и минимизировать их недостатки.
Анализ литературных источников В настоящее время среди разнообразных гомеостатических систем наиболее изученной
на концептуальном уровне, наиболее удобной и доступной для экспериментального исследования, проверки теоретических выводов является физиологическая система регуляции углеводного обмена [1-3]. Поэтому большинство из до сих пор предложенных математических моделей гомеостатических систем были разработаны именно в этой области. При этом все они оказались ограниченно адекватными, как в воспроизведении динамики

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
30
экспериментальных данных, так и в отсутствии у них инвариантности относительно характера выведения системы из равновесного состояния.
Цель работы В связи с выше изложенным представляется целесообразной следующая постановка
задачи исследования: развитие теории математического моделирования гомеостатических систем на примере наиболее изученной на концептуальном уровне физиологической системы регуляции углеводного обмена, нацеленное на получение принципиально новых видов математических моделей, на совершенствование методов и средств математического компьютерного моделирования, а также вычислительных методов, что помимо несомненной непосредственной актуальности в научном и в техническом отношении в перспективе имеет значительно более широкий спектр возможных научно-технических приложений.
Материалы, методы и результаты исследования Саморегуляция гомеостатической системы состоит в наличии у нее устойчивого
равновесного состояния и в стремлении возврата к нему после прекращения возмущающих воздействий, выводящих из него. При этом характер этого устойчивого равновесного состояния системы и факторы, приводящие ее к нему, могут быть различными: хорошо известными или еще не вполне изученными. Кроме того, саморегулирующаяся система может быть замкнутой,, изолированной от внешней среды после воздействия возмущения, и открытой, непрерывно связанной с окружающим пространством вещественными и энергетическими потоками. В первом случае равновесное состояние в системе определяется только ее внутренними факторами, во втором - оно является результатом динамического равновесия различных противоположно направленных внутренних процессов и внешних потоков.
В случае, если состав и структура саморегулирующейся системы, а также законы функционирования ее элементов исчерпывающе известны, в принципе допустимо ее полное аналитическое интегрально-синтетическое описание, из которого, в частности, будет следовать и ее свойство саморегуляции. Однако для очень сложных технических систем такое детальное описание затруднительно и нецелесообразно. Еще более проблемной является ситуация в физиологии, в экологии и в экономике, где элементарные законы еще не достаточно исследованы и поэтому носят гипотетический характер. Более того, даже состав такой системы может быть не вполне детализирован. Безотносительно данных различий общим для всех этих саморегулирующихся систем является само свойство саморегуляции. Оно состоит в том, что динамика возвращения системы к некоторому стабильному равновесному ее состоянию определяется ее же текущим состоянием, вернее его отклонением от этого равновесного состояния.
При этом характер переходного процесса возвращения динамической системы к равновесному состоянию может быть монотонным, апериодическим либо осцилляционным. Осцилляционный переходный процесс, имеющий большое познавательное и практическое значение, давно привлекает внимание исследователей. Он нашел широкое применение в различных технических устройствах, прежде всего, в виде механического маятника и в виде радиотехнического колебательного контура. Саморегулирующиеся системы с осцилляционным возвращением к равновесному, состоянию встречаются часто в технике (в том числе в системах автоматического управления), в экологии, в экономике, а также и в физиологии [4].
Как следует из наблюдений, осцилляционный переходный процесс возвращения саморегулирующейся системы к равновесному состоянию после прекращения действия внешних возмущающих факторов в свою очередь может быть двух принципиально разных видов (рис. 1).

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
31
а) б)
Рисунок 1 - Переходный процесс возвращения системы в равновесное состояние: а)
механического (электрического) осциллятора с затуханием; б) физиологической системы регуляции углеводного обмена
В первом случае, который наблюдается для простых механических и электрических
осцилляционных систем, на протяжении всего переходного процесса его кривая отклонения от равновесного состояния близка к синусоиде с экспоненциально убывающей амплитудой (рис. 1.а)). Во втором случае, присущем сложным гомеостатическим системам (рис. 1.6)), - характер кривой комбинированный: с течением времени и уменьшением отклонения от равновесного состояния он постепенно изменяется от чисто экспоненциально убывающего до осцилляционно убывающего.
Наблюдаемые при гомеостатической саморегуляции слабые осцилляции уровня сохраняемой переменной (рис. 1.6)) означают некоторую инерционность ее механизма. Она приводит к тому, что динамика стремления этой переменной к равновесному значению определяется ее рассогласованием с ним, но не в данный текущий момент времени, а несколько ранее. Характер такой инерционности может быть, вообще говоря, различным: локальным и интегральным. В первом случае динамика изменения уровня сохраняемой переменной )(tu в данное время t зависит от ее же значения в какой-либо предшествующий момент времени, который был на минут раньше, что аналитически можно записать уравнением для ее отклонения 0)()( ututy от равновесного уровня 0u с учетом внешнего поступления сохраняемой переменной с интенсивностью )(tf :
0,)()(/ ttftkydtdy . Это уравнение является дифференциально-разностным уравнением с запаздывающим
аргументом. На временном интервале 0 t оно требуют задания, так называемой, начальной функции )(t , которую для упрощения положим равной нулю.
Т.е. в случае локальной инерционности механизма саморегуляции уровня сохраняемой переменной (локального последействия) соответствующая минимальная математическая модель имеет вид дифференциального уравнения 1-го порядка с запаздыванием, которое, как известно [5], может иметь осцилляционное решение, Его график представлен на рис. 1.6).
Возможно, что характер инерционности механизма саморегуляции уровня сохраняемой переменной более сложный - интегральный (интегральное последействие) [6]. Тогда динамика изменения уровня этой переменной в данный момент времени t зависит от всех его предшествующих значений на протяжении целого временного интервала ],[ ta :

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
32
t
atftkydssysgdtdy )()()()(/ , (1)
где ta – некоторое число, )(sg – положительная функция своего аргумента. Уравнение (1) является интегро-дифференциальным уравнением. Продифференцировав
его по t , получим обыкновенное дифференциальное уравнение 2-го порядка, осцилляционное решение которого имеет график вида, показанного на рис. 1.а).
Последействие, приводящее к инерционности, может быть, вообще говоря, и более сложным, например двойным:
t
a
t
b
s
ctftkydssysgdzzyzvdsdtdy )()()()()()(/
тройным и т.д. Соответствующее ему обыкновенное дифференциальное уравнение динамики гомеостатической саморегуляции (ее минимальная математическая модель) при этом будет иметь третий, четвертый порядок и т.д.
Известно, что традиционная модель колебаний – дифференциальное уравнение 2-го порядка, в принципе, может иметь решение, как экспоненциально убывающего, так и синусоидально убывающего вида. Однако смена его характера требует изменения значений параметров модели, что приводит к ее ограниченной локальной адекватности. С другой стороны, .из содержательных соображений в экологии, экономике и физиологии нет никаких оснований для порядка этой модели выше, чем первого [7-10]. Кроме того, экспериментальные данные свидетельствуют о наличии некоторого запаздывания в работе системы гомеостатической саморегуляции.
До последнего времени переходные процессы в сложных системах при их функциональном моделировании на уровне "черного ящика" пытались описывать в классе обыкновенных дифференциальных уравнений и их систем, в частности присущие им осцилляции обычно, описывали динамическими моделями 2-го порядка. При этом или осознанно получали ограниченно адекватные модели, или для исправления этого повышали степень дифференциальных уравнений соответственно применению формальных методов аппроксимации или структурно-функционального подхода с непременной гипотетичностью и чрезмерным уровнем детализации, неадекватными возможностям экспериментальной проверки и методов идентификации параметров моделей.
Таким образом, оба известные до последнего времени подходы к математическому моделированию сложных гомеостатических систем оказались неудовлетворительными. Поэтому возникла проблема устранения их недостатков путем проведения содержательной структурной идентификации соответствующих моделей в новом классе уравнений, присущем гомеостатическим системам.
В соответствии с отмеченными факторами была предложена новая модель динамики гомеостатически сохраняемой переменной в крови в виде дифференциального уравнения 1-го порядка с запаздывающим аргументом, в котором участие в ее регуляции всех промежуточных факторов учтено косвенно через ее же значения:
.0,)()(;0,
)(1)(22
1111
tttytutuEsk
utuEsktyEsatyEsatftyпор
пор
где , 1a , 2,1k – некоторые числовые параметры, имеющие содержательный смысл, ,
– время запаздывания, 2,1порu – некоторые пороговые уровни, )()( zezzEs – пороговая функция, причем )(ze – единичная функция Хевисайда.
Ранее к численному анализу таких уравнений с запаздыванием применяли те же методы, что и для обыкновенных дифференциальных уравнений. При этом лишь
ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
33
усугублялись известные проблемы сходимости и устойчивости их решений. Вместо усилий по их преодолению эти проблемы были устранены за счет использования имеющегося запаздывания и применения числового аналога на сетке метода шагов, известного ранее для получения аналитического решения этих уравнений.
Структура предложенной модели позволяет проведение ее параметрической идентификации с практически точным воспроизведением динамики гомеостатически сохраняемой переменной, показанной на рис. 1.6). Оказалось, что худшая, но достаточная для практики адекватность этой модели сохраняется даже при ее упрощении путем повышения степени ее агрегации.
Была проведена содержательная конкретизация математической модели гомеостатической саморегуляции для физиологической системы регуляции углеводного обмена. Известно, что в функционировании этой регуляционной системы, которая гомеостатически поддерживает уровень глюкозы в крови на равновесном уровне, принимают участие множество физиологических факторов, детально описать которые не представляется возможным. Поэтому для математического описания такой системы естественным является уровень общей математической модели саморегуляции гомеостатически сохраняемой переменной выхода, всем элементам и структуре которой был придан содержательный смысл. Для этого был применен компартментно-функциональный подход, в соответствии с которым вместо бесперспективных попыток описания многофункциональных органов организма с учетом их морфологии и тонкой структуры моделируются только процессы, обеспечивающие гомеостатические свойства, с выделением среди них главных, определяющих факторов и физиологических переменных, доступных для измерения.
Из всех характеристик углеводного обмена, представляющих диагностический интерес, сейчас действительно доступным для измерения в клинических условиях является лишь уровень гликемии на периферии [10]. Поэтому поначалу в модели углеводного обмена целесообразно было ограничиться только этой переменной выхода, предусматривая при дальнейшей поэтапной декомпозиции и усложнении модели выделение в явном виде и эндогенного инсулина, измерение которого проблематично, но в принципе возможно.
При этом, игнорируя сложность кровеносной системы и неоднородность распределения в ней глюкозы и инсулина, ее целесообразно рассматривать как единый компартмент с их значениями такими, какими они в действительности являются на периферии, и записать уравнение баланса для них для всего компартмента. При таком подходе, однако, учитываются все потоки глюкозы и инсулина в компартмент крови и из него: внешние, которые возбуждают систему регуляции уровня глюкозы и выводят ее из состояния динамического равновесия, и внутренние, которые гомеостатически приводят к нему.
С этой моделью были проведены подробные численные эксперименты. Она впервые воспроизвела целиком всю временную зависимость уровня глюкозы в крови при любой глюкозной и инсулиновой нагрузке. Числовые параметры предложенной модели идентифицируются .в соответствии с клиническими данными обследуемого пациента. Они имеют физиологический смысл и характеризуют процессы именно у данного пациента. Отклонения их значений от нормы несут новую диагностическую информацию, которую можно использовать в медицине при решении широкого круга задач диагностики и терапии сахарного диабета.
Выводы В классе математических моделей с саморегуляцией по параметру с последействием
локального типа разработана конкретная содержательная модель физиологической системы регуляции углеводного обмена. На ее основе построены алгоритмы, реализованные в виде программных модулей, которые разрешают актуальные вопросы клинической медицины по диагностике и терапии сахарного диабета.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
34
Список использованной литературы 1. Харди Р. Гомеостаз / Р. Харди; [Пер. с англ.]. - М.: Мир, 1986. - 81 с. 2. Гомеостатика живого, технических, социальных и экологических систем: Сб. научн.
труд. - Новосибирськ: Наука, Сиб. отд., 1990. - 350 с. 3. Гомеостаз на различных уровнях организации биосистем / [В.И. Нефедов, А.А. Ясайтис,
В.И. Новосельцев и др.] / Под ред. В.И. Новосельцева. - Новосибирск: Наука, 1991. - 232 с.
4. Ферстер Г. О самоорганизующихся системах и их окружении / Г. Ферстер // Самоорганизующиеся системы; [Пер. с англ. Под ред. Т.Н.Соколова]. - М.: Мир, 1964. - С. 5-23.
5. Марри Дж. Нелинейные дифференциальные уравнения в биологии. Лекции о моделях / Дж. Марри; [Пер. с англ.]. - М.: Мир, 1983. - 397 с.
6. Лапта С.И. Динамика ауторегуляции уровня гликемии: запаздывание или последействие? / С.И. Лапта // Радиоэлектроника и информатика. - 2003. - №2. - С. 143-147.
7. Федоров В. Д. Экология / В. Д. Федоров, Т. Г. Гильманов. - М.: Изд-во МГУ, 1980. - 464 с.
8. Смит Дж.М. Модели в экологии / Дж.М. Смит; [Пер. с англ.]. - М.: Мир, 1976. - 184 с. 9. Экономическая теория / Под ред. А.И. Добрынина, Л.С. Тарасевича. - Спб.: Питер, 2001.
- 544 с. 10. Endocrinology and metabolism I Editors: P. Felig, J.D. Baxter, L.A. Frohman. - 3d ed. -
McGraw-Hill, INC., 1995. - 1940 p.
References 1. Hardy, P. (1986), Gomeostaz [Homeostasis], Translated by English, Mir, Moscow, Russia. 2. Gomeostatika zhivogo, tehnicheskih, social'nyh i jekologicheskih sistem, (1990), Nauka,
Novosibirsk, Russia. 3. Nefedov, V.I., Jasajtis, A.A. and Novosel'cev, V.I. (1991), Gomeostaz na razlichnyh urovnjah
organizacii biosistem [Homeostasis at different levels of biological systems], ], in Novosel'cev, V.I. (ed.), Nauka, Novosibirsk, Russia.
4. Ferster, G. (1964), “Self-organizing systems”, Samoorganizujushhiesja sistemy, pp. 5-23. 5. Marri, Dzh. (1983), Nelinejnye differencial'nye uravnenija v biologii. Lekcii o modeljah,
Translated by English, Mir, Moscow, Russia. 6. Lapta, S.I. (2003), “Dynamics of autoregulation of blood glucose levels: lag or aftereffect?”,
Radiojelektronika i informatika, no. 2, pp. 143-147. 7. Fedorov, V. D. and Gil'manov, T. G. (1980), Jekologija, Publishing MSU, Moscow, Russia. 8. Smit, Dzh.M. (1976), Modeli v jekologii, Translated by English, Mir, Moscow, Russia. 9. Dobrynin, A.I. and Tarasevich, L.S. (2001), Jekonomicheskaja teorija, Piter, St. Peterburg,
Russia. 10. Felig, P., Baxter, J.D. and Frohman, L.A. (1995), Endocrinology and metabolism, McGraw-
Hill, INC., USA.
Надійшла до редакції: Рецензент: 29.04.2014 д-р техн. наук, проф. Улітін Г.М.
C.C. Лапта, Н.В. Масолова, Я.В. Зинов’єва Навчально-науковий професійно педагогічний інститут ДВНЗ «Українська інженерно педагогічна академія», ДВНЗ «Харківський національний університет радіоелектроніки», ДВНЗ «Донецький національний технічний університет» Розвиток теорії моделювання перехідного процесу в складній гомеостатичній системі. Стаття присвячена розвитку теорії математичного моделювання реальних складних систем з

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
35
недостатньою структурованістю, що володіють гомеостатичною властивістю з локальною післядією на прикладі найбільш дослідженої на концептуальному рівні фізіологічної системи регуляції вуглеводного обміну. Запропоновано новий підхід, який відрізняється тим, що структурна ідентифікація складної гомеостатичної системи проводиться в функціональному аспекті. Отримано нові математичні моделі, поліпшені методи і засоби математичного комп'ютерного моделювання, а також обчислювальні методи. Ключові слова: математичні моделі, гомеостаз, медична діагностика, диференціальні рівняння з затримкою аргументів.
S.S. Lapta, N.V. Mosolova, Y.V. Zinovieva Ukrainian Engineering and Pedagogical Academy, Kharkiv National University of Radio Electronics, Donetsk National Technical University Development of the theory of modeling a transition process in a complex homeostatic system. The article is devoted to the development of the theory of mathematical modeling of real complex systems with insufficient structuring that have homeostatic properties of local aftereffect on the example of the most studied (at the conceptual leve) physiological system of regulation of carbohydrate metabolism. The paper presents a new approach, which is characterized by the fact that the structural identification of a complex homeostatic system is conducted in a functional sense. New mathematical models were obtained, methods and tools of mathematical computer modeling and computational methods were improved . Keywords: mathematical models, homeostasis, medical diagnostics, differential equations with delayed arguments.
Лапта Станислав Сергеевич, Украина, закончил Харьковский университет радиоэлектроники, канд. техн. наук, доцент, доцент кафедры электроники и компьютерных технологий систем управления УНППИ Украинской инженерно-педагогической академии (ул. Артема, 5, г. Артёмовск, 662951, Украина). Основное направление научной деятельности – моделирование сложных гомеостатических систем.
Масолова Наталья Витальевна, Украина, закончила Харьковский государственный технический университет радиоэлектроники, канд. техн. наук, доцент кафедры микроэлектроники, электронных приборов и устройств Харьковского национального университета радиоэлектроники (пр-т Ленина 14, г. Харьков, 61166, Украина). Основное направление научной деятельности – физические основы сенсорики, электронных приборов.
Зиновьева Яна Владимировна, Украина, закончила Донецкий национальный университет, канд. физ.-мат. наук, ассистент кафедры высшей математики им. В.В. Пака Донецкого национального технического университета (ул. Артема, 96, г. Донецк, Украина). Основное направление научной деятельности – математическое моделирование.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Oбчислювальна техніка та автоматизація №1 (26)’2014
© Мироненко Л.П., Петренко И.В., Власенко А.Ю.,2014 36
УДК 51 (071)
Л.П. Мироненко (канд. физ.-мат. наук) И.В. Петренко (канд. физ.-мат. наук), А.Ю. Власенко
ГВУЗ «Донецкий национальный технический университет», г. Донецк кафедра высшей математики,
кафедра радиотехники и защиты информации e-mail: [email protected]
ИНТЕГРАЛ НЬЮТОНА-ЛЕЙБНИЦА И ВТОРАЯ ИНТЕГРАЛЬНАЯ ТЕОРЕМА О СРЕДНЕМ
В статье рассматривается определение интеграла в более узком смысле, чем интеграл Римана. Можно считать новое определение, в некотором смысле, частным случаем интеграла Римана. В интегральной сумме Римана функция вычисляется в левых (или правых) точках разбиения отрезка интегрирования. В основе интеграла Ньютона-Лейбница лежит определение первообразной, дифференциала функции и специальный способ выбора точек на частичных отрезках разбиения. Преимуществом такого подхода является формула Ньютона-Лейбница и вторая интегральная теорема о среднем, которые следуют из нашей теории. Предложенная схема углубляет понимание природы интеграла. Ключевые слова: методика, интеграл, интегрирование, дифференциал, формула Ньютона-Лейбница, разбиение.
Введение В курсе математического анализа определенный интеграл обычно вводится по Риману
на основе интегральной суммы (Римана) [1-3]. Определение интеграла по Риману является самым широким определением интеграла, не считая интеграла Лебега, Стилтьеса, функционального интегрирования. В более узком смысле, с большими ограничениями интеграл может быть определен другими способами. Одним из примеров этого определения является интеграл Лагранжа, когда функция в интегральной сумме Римана вычисляется в специально выбранных точках (удовлетворяющих теореме Лагранжа [1]) [4].
Мы рассмотрим еще один способ выбора – левые или правые концы частичных отрезков и покажем еще один вариант формулировки интеграла. Этот вариант мы назвали интегралом Ньютона-Лейбница.
Определение интеграла через дифференциал функции. Формула Ньютона-Лейбница.
Пусть функция )(xF дифференцируема на некотором отрезке ],[ ba . Ее дифференциал в произвольной точке отрезка dxxFxdF )()( . Обозначим )()( xfxF . Тогда
dxxfxdF )()( , а в произвольной фиксированной точке ix
iii xxfxdF )()( , (1) где ii xxx , ],[ bax i .
Произведем разбиение отрезка ],[ ba точками nixi ,...,1,0 , , расположив их на отрезке, как это обычно делается при определении разбиения отрезка
bxxxxa nno 11 ... . Обозначим длину каждого из отрезков разбиения ,01 jjj xxx

37
nj ,...,2,1 , а jx max - наибольший по длине из отрезков jx . Применим формулу (1) к каждой точке отрезка разбиения, начиная с точки oxa . Построим сумму
nj jj
nj j xxfxdF 1 11 )()( . (2)
Рассмотрим отдельно левую и правую части равенства. Выразим дифференциал )( jxdF через конечное приращение )( jxF , используя
определение дифференциала [2]: jjj xoxdFxF )()( ,
где jxo - бесконечно малая более высокого порядка малости, чем jx . Теперь левая часть
равенства (2)
n
j jn
j j xoxF11
)( .
Первая сумма, равная )()( aFbF - разность первообразных функции )(xf . В самом деле,
)()()()(...)()()()()( 1211211 ппппоnj j xFxFxFxFxFxFxFxFxF
).()()()( aFbFxFxF оп
Все внутренние слагаемые суммы nj jxF1 )( взаимно уничтожаются.
Предел второй суммы должен вычисляться при условиях 0, n . При этом
0lim 10
nj j
nxo
.
Доказательство ограничим случаем равностоящих точек разбиения отрезка ],[ ba . В этом случае nabx j /)( . Поэтому величина jxo есть бесконечно малая более высокого
порядка малости, чем n/1 . Число слагаемых в сумме nj jxo1 равно n . Фактически, речь
идет о вычислении предела nonn
/1lim
, который равен нулю.
Правая часть равенства (2) называется интегральной суммой Ньютона-Лейбница для
функции )(xf , а предел
n
jjj
nxxf
11
0
)(lim
- определенным интегралом в смысле Ньютона-
Лейбница. Итак, в формулировке Ньютона-Лейбница определенный интеграл может быть
определен двояко:
как предел
n
jj
nxdF
10
)(lim
или
n
jjj
nxxf
11
0
)(lim
. (3)
В любом из этих вариантов имеем формулу Ньютона-Лейбница
)()()( aFbFdxxfba . (4)
При этом функция )(xf называется интегрируемой по Ньютону-Лейбницу. Как ясно из

38
рассуждений, основным требованием к функции )(xf является существование первообразной )(xF на ],[ ba . Это условие гарантирует существование интеграла Ньютона-Лейбница.
Сравнение с интегралом Римана.
В интегральной сумме Римана
n
jjj xf
1)( точки j выбираются произвольно на
частичных отрезках jx разбиения , а определение интеграла Римана имеет следующие особенности:
1. Разбиение отрезка ],[ ba произвольное - разбиение. 2. Выбор точек ],[ 1 iij xx произвольный. 3. Существует конечный предел интегральной суммы , при условиях n и 0 . В формулировке Ньютона-Лейбница первое и третье условия остаются прежними, а вот
точки 1 jj x - левые концы частичных отрезков jx . Во втором условии точки j не произвольные, а выбираются специальным образом. Безусловно, это сужает определение определенного интеграла, но дает формулу Ньютона-Лейбница, что невозможно в формулировке Римана.
Вторая интегральная теорема о среднем Применим определение интеграла Ньютона-Лейбница к трем точкам bxxaxo 21,,
разбиения отрезка ],[ ba
121111 ))(())(()( xboaxobxbfaxafdxxfba .
Обратим внимание на то, что )()( aFaf и )()( bFbf . Если функция )(xf монотонная и непрерывная на ],[ ba , то найдется точка ],[ ba , такая, что boao 21 . В таком случае имеем равенство, выражающее вторую теорему о
среднем в интегральном исчислении ))(())(()( bbfaafdxxfb
a . Обобщение теоремы о среднем простое, если переписать формулу в виде
dxbfdxafdxxf ba
ba
)()()( , и применить элементы теории меры [5-6]:
dxxgbfdxxgafdxxgxf ba
ba
ba )()()()()()( .
Подчеркнем, что функция )(xg достаточно произвольная, основное требование к ней – интегрируемость, а функция )(xf должна быть непрерывной и монотонной на ],[ ba .
В формулировке определенного интеграла по Лагранжу точки j на частичных отрезках jx –разбиения выбираются согласно теореме Лагранжа
jjjjj xfxFxF )()()( . Применение к интегральной сумме Лагранжа разбиения отрезка на три точки приводит к первой интегральной теореме о среднем
))(()( abfdxxfba . А обобщенная теорема имеет вид
dxxgfdxxgxf ba
ba )()()()( .
Мы приходим к следующему заключению. Формулировка определенного интеграла по Лагранжу легко приводит к первой интегральной теореме о среднем, а формулировка по Ньютону-Лейбницу – ко второй теореме о среднем.

39
В заключении мы предлагаем методическую схему изучения определенного интеграла (рис. 1).
Рисунок 1 – Методическая схема более углубленного изучения определенного интеграла в
курсе математического анализа Выводы 1. Главным результатом работы является еще одна формулировка определенного
интеграла, которую мы назвали интегралом Ньютона-Лейбница. Формулировка основана на формуле связи между приращением функции и ее дифференциалом. Подход сразу приводит к формуле Ньютона-Лейбница – основной теореме интегрального исчисления. Формула Ньютона-Лейбница получается за счет специального выбора точек на частичных отрезках разбиения.
2. Отметим два важных достоинства нашего подхода, не считая формулы Ньютона-Лейбница. Первое из них – вторая интегральная теорема о среднем является простым следствием построения интегральной суммы Ньютона-Лейбница. В интеграле Римана доказательство второй теоремы о среднем весьма сложное и не является простым следствием интегральной суммы Римана.
3. Второе достоинство нашего подхода состоит в том, что формулировка и доказательство многих свойств определенного интеграла проще проводить, используя формулу Ньютона-Лейбница, а не с помощью интегральной суммы Римана и предельным переходом в ней, как это делается в стандартном курсе анализа и учебных пособиях [1-3]. В стандартных курсах анализа формула Ньютона-Лейбница обычно рассматривается после свойств интеграла.
Список использованной литературы 1. Кудрявцев Л.Д. Математический анализ. Т. 1 / Л.Д. Кудрявцев. - М.: Наука, 1970. - 571 с. 2. Ильин В.А. Основы математического анализа. Т. 1 / В.А. Ильин, Э.Г. Поздняк. - М.: Изд-
во ФМЛ, Москва, 1956. - 472 с. 3. Фихтенгольц Г.М. Курс дифференциального и интегрального исчисления. Т. 1 / Г.М.
Фихтенгольц. - М.: Наука, Изд-во ФМЛ, 1972. - 795 с. 4. Мироненко Л.П. Интегральная форма теоремы Лагранжа и ее применение к
определенному интегралу / Л.П. Мироненко, Н.А. Прокопенко // Сб. науково-методичних робіт. – 2009. - вип. 6. - С. 119-126.
5. Мироненко Л.П. Интегральные теоремы о среднем. Подход, основанный на свойствах интегральной меры. / Л.П. Мироненко, И.В. Петренко, О.А.Рубцова // Искусственный интеллект. – 2010. – 4. - С. 617-622.
6. Мироненко Л.П. Простой способ доказательства теоремы о среднем в интегральном исчислении / Л.П. Мироненко, О.А. Рубцова, Т. И. Табаленкова // Материалы

40
региональной студенческой конференции «Математическая культура инженера». – Донецк, 2010. - С. 233-237.
References 1. Kudrjavstev, L.D. (1970), Matematichesky analiz. Tom 1. [Mathematical analysis. Vol.1.],
Nauka, Moskow, Russia. 2. Ilyn, V.А. and Pozdnjak, E.G. (1956), Osnovy matematicheskogo analiza. Tom 1. [The bases of
mathematical analysis. Vol.1.], FML, Moskow, Russia. 3. Fihtengolts, G.М. (1972), Kurs differentsialnogo i integralnogo ischislenia. Tом 1. [A course of
differential and integral calculus. Vol.1.], Nauka, FML, Moskow, Russia. 4. Mironenko, L.P. and Prokopenko, N.А. (2009), “Integralnja forma teoremy Lagranga i
primenenie k opredelennomu integralu”, sbоrnic naukovo-metodichnih robot DonNTU, vol, 6, pp. 119-126.
5. Mironenko, L.P., Petrenko, I.V., and Rubtsova, О.А. (2010), “Integralnie teoremy o srednem. Podhod, osnovanniy na svojstvah integralnoj meri”, Iskustvenniy intelekt [Artificial intelligence], no. 4, pp. 617-622.
6. Mironenko, L.P., Rubtsova, О.А. and Tabalenkova, Т., (2010), “A simple prove of the theorems in the integral calculus”, Proc. of regionaly student conference “Mathematical culture engineer”, National Technical University, Donetsk, pp. 233-238.
Надійшла до редакції: Рецензент: 18.05.2014 д-р фіз.-мат. наук, проф. Малашенко В.В.
Л.П. Мироненко, І.В. Петренко, А.Ю.Власенко ДВНЗ «Донецький національний технічний університет» Інтеграл Ньютона-Лейбниця та друга інтегральна теорема про середнє. У статті розглядається визначення інтеграла в більш вузькому сенсі, ніж інтеграл Рімана. Можна вважати нове визначення, в деякому розумінні, окремим випадком інтеграла Рімана. В інтегральний сумі Рімана функція обчислюється в лівих (або правих) точках розбиття відрізка інтегрування. В основі інтеграла Ньютона-Лейбніца лежить визначення первісної, диференціала функції і спеціальний спосіб вибору точок на часткових відрізках розбиття. Перевагою такого підходу є формула Ньютона-Лейбніца і друга інтегральна теорема про середню, які випливають з нашої теорії. Запропонована схема поглиблює розуміння природи інтегралу. Ключові слова: методика, інтеграл, інтегрування, диференціал, формула Ньютона-Лейбниця, дроблення відрізку.
L.P.Mironenko, I.V. Petrenko, A.Yu. Vlasenko Donetsk National Technical University Newton-Leibnitz’s integral and the second mean value theorem. The paper considers an integral in a more narrow sense than Riemann’s integral. The integral is a case of Riemann’s integral when values of the integral function in the Riemann’s integral sum are taken at left (right) points on the partial intervals of a breaking of the total integration interval. Newton-Leibnitz’s integral is based on the definitions of a primitive function and differential and, as was pointed above, by special choice of points in partial intervals. Advantages of the approach are Newton-Leibnitz’s formula and the second mean value theorem, which follow right from our theory. Also we proposed a method of more deep studying of the definite integral in the course of mathematical analysis. Keywords: methods, integral, integration, differential, Newton-Leibnitz’s formula, mean value.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
© Найденова Т.В., Федюн Р.В., 2014 41
УДК 628.33
Т.В. Найденова, Р.В. Федюн (канд. техн. наук, доц.) ГВУЗ «Донецкий национальный технический университет», г. Донецк
кафедра автоматики и телекоммуникаций e-mail: [email protected], [email protected]
СИНТЕЗ САУ ПРОЦЕССОМ БИОХИМИЧЕСКОЙ ВОДООЧИСТКИ
Выполнен синтез САУ процессом биохимической водоочистки. Поскольку процесс биохимической водоочистки включает несколько сложных процессов, то синтез САУ был проведен для трех основных контуров. Были определены управляющие величины – подача активного ила и воздуха, а также определены возмущающие факторы: количество сточных вод, которые поступают в аэротенк Q , объем сточных вод в аэраторе V , концентрация загрязняющих веществ во входном потоке вод iS . Выполнен синтез системы управления компрессорной и насосной установками. Выбраны регуляторы и определены их настроечные параметры. Выполненное моделирование динамических процессов в САУ подтвердило эффективность предложенных законов управления. Ключевые слова: биохимическая очистка сточных вод, синтез САУ, система автоматического управления, ПИД-регулятор, регулятор Ресвика, упредитель Смита, математическое моделирование.
Общая постановка проблемы Для очистных сооружений больших городов, на которых осуществляется
биохимическая очистка сточных вод в аэротенке, до сих пор важной практической задачей остается оптимизация процесса технологического процесса водоочистки. Скорости аэробного окисления при биохимической очистке производственных и бытовых сточных вод изменяются в широких пределах и являются функцией видового и количественного состава активного ила, начальной концентрации загрязнений, требуемой степени очистки, биохимической структуры загрязнений, а также физических параметров процесса (интенсивности перемешивания, рН, температуры и т. д.). Чем выше исходная концентрация загрязнений (до определенных пределов) и чем меньше требуемая степень очистки, тем выше скорость окисления.
Построение эффективной системы автоматического управления становится невозможной без глубокого исследования характеристик и процессов, которые протекают в аэротенке (объекте управления).
Постановка задач исследования Для исследования системы автоматического управления необходимо решить
следующие задачи: 1. Определить управляемые величины процесса водоочистки, выделить
возмущающие факторы; 2. Выполнить синтез системы управления компрессорной и насосной установками; 3. Выполнить синтез САУ процессом биохимической водоочистки. Решение задач и результаты исследований Качественный контроль процесса очистки сточных вод и управление им могут быть
обеспечены при измерении параметров, которые нельзя определить путем измерения (степень токсичности сточной воды для микроорганизмов активного ила, интенсивность биоокисления, активность ила и др.).

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Oбчислювальна техніка та автоматизація №1 (26)’2014
42
Процесс биохимической водоочистки можно зарделись на 4 фазы: первое уравнение описывает баланс загрязнений в аэротенке; второе уравнение – баланс массы растворенного в аэротенке кислорода; третье уравнение – зависимость скорости потребления кислорода от изменения относительной нагрузки на ил; четвертое уравнение – кинетику илового баланса при изменении нагрузки на ил [1,2]. Процесс биохимической водоочистки является нелинейным и описывается совокупностью взаимозависимых нелинейных уравнений:
2)(09,063,035,1)(
)(
)()(
віднS
віднSкис
SкисВозд
кис
xYмулмулidtds
xxxИлxrИлdtdc
LLccQdt
dc
cVsQQsQsQV
cbcVcQQcQV x
,
где V - объем сточных вод, xc - концентрация микроорганизмов в аэраторе, xrc - концентрация микроорганизмов во возвратном иле; Q - входной поток сточных вод, ИлQ - поток возвратного ила, b - удельный показатель гибели микроорганизмов, - удельный показатель роста микроорганизмов, который зависит от концентрации загрязнений, ̂ - максимальное значение показателя роста микроорганизмов, K - постоянный параметр, который зависит от конструкции аератора, s - концентрация загрязнений в аэраторе, is - концентрация загрязнений во входом потоке сточных вод, Y - коэффициент восстановления,
кисc - концентрация растворенного кислорода, - коэффициент растворенного кислорода, Sкисc - концентрация насыщения, sL - загрузка на ил, Z - зольность ила.
Управляемыми величинами являются подачи активного ила и воздуха, то есть возможно изменение их количества при помощи подачи в аэротенки. На процесс очистки воды действуют возмущающие факторы, а именно количество сточных вод, которые поступают в аэротенк Q , объем сточных вод в аэраторе V , концентрация загрязняющих веществ во входном потоке вод iS .
При синтезе алгоритмической структуры СУ необходимо выполнить следующие главные требования;
1) система должна как можно лучше, точнее воспроизводить любые изменения задающего воздействия x(t) на выходе y(t) объекта управления;
2) система должна максимально лучше устранять влияние возмущений (как внешних, так и внутренних) на управляемую координату y(t);
3) система должна быть устойчивой. Первым двум главным целям синтеза соответствуют следующие математические
условия: - передаточная функция САУ по каналу задания должна быть равна единице:
1)()()(
pXpYpWЗ ,
- передаточная функция по каналам возмущений, например, по возмущению f(p), приложенному на выходе объекта, равна нулю:
0)(1)()()( pW
pFpYpW ВВ .
Для решения задачи синтеза алгоритмической структуры должны быть известны передаточная функция )( pWO объекта управления, возмущения вхf и выхf действующие на входе и выходе объекта, а также помеха g возникающая в каналах задания и измерения [3,4].

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Oбчислювальна техніка та автоматизація №1 (26)’2014
43
Внешнее воздействие на объект управления довольно долгое время имеют одно и тоже значение, таким образом очевидно, что объект является инерционным с запаздыванием.
)( pW)( px
)(3 pg
)(4 pg
)( pf
)( py
)()()( pWpWpW ОУУ
)( pW
)( pf
)( py)(px)( pg
)( pe
)()()( 3 pgpgpg и Рисунок 1 – Алгоритмическая структура системы управления
Определим структуру и передаточную функцию идеального регулятора для
инерционных объектов с запаздыванием, которые можно описать следующей обобщенной передаточной функцией
opoo epWpW )()( ' , (1)
где )(' pWo - дробно-рациональная функция, характеризующая инерционную часть объекта, 0 - чистое запаздывание объекта.
Учтем, что при подстановке передаточной функции (1) в формулу
)(1
)(1)(
)()()(
1. pWpф
pфppypW
oопт
оптир
, (2)
в передаточной функции регулятора появится сомножитель ope который соответствует идеальному упредителю и точная реализация которого технически невозможна. Поэтому с целью упрощения искомой структуры регулятора и облегчения его технической реализации целесообразно допустить, чтобы для объектов, содержащих чистое запаздывание 0 , идеальная система воспроизводила задающее воздействие с запаздыванием 0 т. е. Чтобы
opоптоптX eppp )(')()( , (3)
где )(' pопт - оптимальный фильтр для сигналов x(p) и g(p). Тогда, согласно (2) получим идеальный регулятор для объектов с запаздыванием
)('1
)('1)('
)(. pWepp
pWo
pопт
оптир
o
, (4)
который называется регулятором Ресвика.
)( px
)(pg
)( p )(1 p )(pp)( pf
)( py)(pu)( pФопт )(
1pW o
opo epW )(
opo epW )(
Рисунок 2 – Структурная схема идеального регулятора Ресвика
для объектов с запаздыванием

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Oбчислювальна техніка та автоматизація №1 (26)’2014
44
Внутренняя обратная связь регулятора Ресвика, содержащая звено чистого запаздывания, прогнозирует, какой сигнал должен появиться на выходе объекта после очередного изменения управляющего воздействия u. Так как эта связь положительная, то прогнозируемый сигнал постоянно компенсирует (нейтрализует) равный ему реальный выходной сигнал объекта. Результирующий сигнал εр(p) появляется только в первые моменты времени после изменения внешних воздействий. Таким образом, благодаря дополнительной обратной связи, моделирующей динамику объекта, из основного контура как бы исключается чистое запаздывание 0 , которое всегда ухудшает устойчивость системы и затрудняет решение задачи синтеза.
Как и в общем случае, практическая реализация идеальной системы управления объектом с запаздыванием связана с определенными техническими трудностями. Существенным недостатком системы с регулятором (4) является ее критичность или сильная чувствительность к малым вариациям запаздывания объекта: система устойчива только при точном равенстве запаздывания объекта 0 и запаздывания М0 , моделируемого в объекте, т. е.
М00 . (5) При несовпадении запаздываний система может стать неустойчивой. Можно показать,
что в случае, когда Фопт(р) =kопт, для устойчивости замкнутой системы необходимо kопт < 0,5. При kопт > 0,5 малейшее нарушение равенства (5) ведет к потере устойчивости, хотя при точном совпадении запаздываний коэффициент kопт может быть сколь угодно большим.
Для повышения запаса устойчивости систем с регулятором (4) в их контур вводят дополнительные корректирующие звенья или ограничиваются неполной компенсацией инерционной части объекта. Естественно, что динамическая точность управления при этом ухудшается.
Идея нейтрализации запаздывания объекта реализуется также с помощью упредителя Смита, которым охватывают типовые регуляторы. Нетрудно убедиться, что при большом передаточном коэффициенте ( рk ) регулятор с упредителем Смита эквивалентен регулятору Ресвика с Фопт(р) =1.
opo epW )()(pWp
)1)(( opo epW
)( pf
)( py)(px )( p )(pu
Рисунок 3 - Структурная схема идеального регулятора с упредителем Смита для
объектов с запаздыванием Систему с упредителем Смита технически реализовать легче, так как не требуется
моделировать обратную передаточную функцию объекта. Хотя регулятор Ресвика (4) практически осуществить никогда не удается, анализ его
свойств позволяет оценить предельные возможности управления объектами с запаздыванием. Так, для наилучшего воспроизведения задающего воздействия x(p) при отсутствии помехи (т. е. при Фопт(р) =1) регулятор (4) принимает вид:
)1)(('1)(.
opo
ирepW
pW
, (6)
а передаточные функции замкнутой системы по каналу задания (x(p)-y(p))

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Oбчислювальна техніка та автоматизація №1 (26)’2014
45
opЗ epW )( , (7)
и по каналу возмущения (f(p)-y(p)) op
В epW 1)( (8) Функциям (7) и (8) соответствуют идеальные переходные процессы прямоугольной
формы, заканчивающиеся за минимально возможное время 0пt . Применим регулятор Ресвика для широко используемых приближенных моделей
промышленных объектов с запаздыванием: - без инерционной составляющей
opOO ekpW )( , (9)
- с инерционной частью первого порядка op
О
OO e
рТkpW
1)( , (10)
- с инерционной частью второго порядка op
ОО
OO e
рТрТkpW
)1)(1()(
21. (11)
Наиболее трудно управляемыми являются объекты, содержащие только чистое запаздывание
opOO ekpW )( , (12)
и для них лучше всего применять именно регулятор Ресвика или упредитель Смита, обеспечивающие структурную компенсацию запаздывания. Регулятор, (6) для объекта (12) принимает вид
)1(1
)()()(
opO
ри ekpepupW
. (13)
При медленных (низкочастотных) внешних воздействиях ( 01 CВ ), для которых допустима приближенная замена
pe op 1 , (14) идеальный регулятор эквивалентен И-регулятору:
рkpW и
ри )( , (15)
где kи = 1/kо 0 . При высокочастотных воздействиях регулятор (13) действует как дискретный: после
каждого очередного изменения управляющего воздействия u он выжидает в течение интервала 0, благодаря этому контур системы оказывается как бы разомкнутым, а устойчивость ее улучшается.
Для инерционного объекта 1-го порядка с запаздыванием идеальный регулятор (6) с учетом условия (14) становится эквивалентным ПИ-регулятору
рTk
pkk
рkpT
pWИ
pИ
Пoo
ори
111
)( , (16)
где oooРП kTkk , ooИРИ kTkk 1 , что дает еще дополнительные соотношения: oooР Tkk и оИ TT .
Наконец, для инерционного объекта 2-го порядка с запаздыванием (17) регулятор Ресвика на низких частотах эквивалентен ПИД-регулятору
рТ
рTkрk
pkk
рkpTpTpW Д
ИpД
ИП
oo
оори
11)1)(1()( 21
, (18)

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Oбчислювальна техніка та автоматизація №1 (26)’2014
46
0 1 2 3 4 5 6 7 8 9 100
500
1000
1500
t, с
n,об
/хв
где ooooРП kTTkk )( 21 , ooИРИ kTkk 1 , ooooДРД kTTТkk )( 21 . Для выполнения главных требований к синтезу системы управления, рассмотрим
контуры, в которых протекают сложные технологические процессы отдельно. Регулирование подач в аэротенк воздуха и ила осуществляется изменением продуктивности компрессора и насоса. Внешние влияние на объект довольно длительное время имеют одно и тоже значение, поэтому для таких контуров используют ПИ-регуляторы. Передаточная функция ПИ-регулятора имеет вид
pTKpW
ИpПИ
1)( .
Для оценки качества регулирования в замкнутой системе с регулятором обычно используют ряд критериев качества, в данном случае критерием качества для регулятора с учетом его предназначения, для компрессорной установки будет максимум ошибки регулирования
)(max0
max teet
.
Вид компрессорной установки в терминах Matlab Simulink приведена на рис. 1.
ob/minтис.м^3/год
n
Частотa обертання AD
P
Тиск
T
Температураповітря
t
Pxi
Розрахунок питомої щільності повітря
xi
nQr
Компресор
1000/60
КQ
Qvozd
Витрата повітря
1.204
xi
0
n
F Fk
SHIM1
Qyst
Qповіт_уст
0
Qповіт
PI(s)
PI Control ler
max
MinMax
4250/1500
Kr
0
Emax_KS
|u|
Abs
f n
AD1
Рисунок 4 – Схема моделирования компрессорной установки
После настройки ПИ-регулятора и проведенном регулировании полученны следующие
результаты:
0 1 2 3 4 5 6 7 8 9 100
100
200
300
400
500
600
700
800
t, с
Qпо
віт,
м3 /х
в
а) б)
Рисунок 5 – а) частота вращения двигателя, б) подача (расход) воздуха

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Oбчислювальна техніка та автоматизація №1 (26)’2014
47
0 1 2 3 4 5 6 7 8 9 100
100
200
300
400
500
600
700
800
t, с
n, о
б/хв
.
0 1 2 3 4 5 6 7 8 9 100
20
40
60
80
100
120
t, с
Qil,
м3 /хв
0 1 2 3 4 5 6 7 8 9 100
1000
2000
3000
4000
5000
6000
7000
8000
t,с
Pt,
мм
. вод
. ст.
Рисунок 6 – Теоритическое давление мм.вод.ст 4616
встtР Таким образом, ПИ-регулятор имеет положительные стороны: коэффициент усиления
на может быть меньше 01,0pK , поэтому увеличивается динамическая точность регулирования; модуль коэффициента пропорциональности регулятора стремится к бесконечности, обеспечивая тем самым нулевую ошибку в установившемся режиме.
Рассмотрим насосную установку в терминах Matlab Simulink, приведенную на рис. 7. Регулирование расхода ила косвенно зависит от изменения скорости вращения
асинхронного двигателя, который регулируется ПИ-регулятором. Для контура подачи активного ила критерий максимума ошибки регулирования не подходит, потому что привод работает с запасом, номинальное значение расхода ила достигается раньше, чем двигатель разгонится до номинальной частоты вращения, что обусловлено технической реализацией.
м^3/хвтис .м^3/год
582.6
п
n_nas
Частота обертання AD1
-K-
Коэффициент преобразования
Qil
Витарата мулу
TransportDelay
10.47
0.0975s+1
Transfer Fcn2
F Fn
SHIM2
101.7
Qil
PI(s)
PI Controller2
n_yst
Max_oborot
Kos
Kос
1/60
Gain8
f n
AD2
Рисунок 7 – Схема моделирования насосной установки
Как и для компрессорной установки настраиваем ПИ-регулятор и проводим
моделирование. Результаты моделирования приведены на рис. 8.
а) б)
Рисунок 8 – а) частота вращения двигателя; б) подача активного ила.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Oбчислювальна техніка та автоматизація №1 (26)’2014
48
Рассмотрим общую схему управления очистными сооружениями. Реальная САУ очистных сооружений управляется автоматически при помощи встроенного в преобразователь частоты программируемого логического контроллера. Так как на вход по обратной связи в синтезированную беспрерывную систему управления поступает цифровой сигнал от датчика, который измеряет концентрацию растворенного кислорода, необходимо организовать цифровое управление для цифрового сигнала и его обработки. Для регулирования используется дискретный ПИД-регулятор. Передаточная функция которого в дискретной форме имеет вид:
)1()(
2210
zz
zkzkkzWПИД .
Схема моделирования САУ очистными сооружениями приведена на рис. 9 [5,6].
Компрес орна ус тановкаподачі повітря
Насосна ус тановкаподачі активного мулу
Аєротенок
ob/mi nтис .м^3/год
м^3/хв
м^3/хвтис.м^3/год
589.2
п
n_nas
Час тота обертання AD1
n
Частотa обертання AD
P
Тиск
T
Температураповітря
t
Pxi
Розрахунок питомої щі льнос ті повітря
-K-
Коэффициент преобразования
xi
n
Qr
Компрес ор
1000/60
КQ
Qvozd
Витрата повітря
Qil
Витарата мулу
1.204
xi
1354
n
1.399
dQkis/dt
12.4
aQil /dt
T ransportDelay
10.47
0.0975s+1
Transfer Fcn2
Qв озд
Qil
Cx
S
Ck is
Ls
dQk is/dt
dQil/ dt
Subsystem1
F Fn
SHIM2
F Fk
SHIM1
87.64
S,mg/l
45
Qповіт_ус т
745.5
Qповіт
Quantizer
102.8
Qil
PI(s)
PI Control ler2
PI(s)
PI Controll er
max
MinMax
750
Max_oborot
0.07943
Ls
Kos
Kос
4250/1500
Kr
1/60
Gain8
0.267
Emax_KS
PID(z)
Discrete PID Controller
24.03
Cx,mg/l
3.33
Ckis,mg/l
|u|
Abs
f n
AD2
f n
AD1
Рисунок 9 – Схема моделирования САУ очистными сооружениями
После настройки коэффициентов и проведенном моделировании можно сделать
выводы: - концентрация микроорганизмов в аэротенке начинает увеличиваться, поскольку есть
благоприятные условия для жизнедеятельности микроорганизмов (воздух и загрязнения); - концентрация растворенного кислорода сначала увеличивается, благодаря тому, что
поступает водух в аэротенк, а потом уменьшается, что обусловленно потреблением растворенного кислорода активным илом;
- нагрузка на ил и скорость потребления кислорода находяться в переделах нормы. Выводы 1. Были определены управляемые величины (подача активного ила и воздуха),
выделены вомущающие фокторы, влияющие на процесс вооочистки. 2. При помощи выбранного ПИ-регулятора для управления компрессорной и насосной
установоками, получены неоходимые апериодические процессы, перерегулирование приведено к нулю, нет статической ошибки.
3. Анализ общей схемы управления очистными сооружениями показал, что САУ работает в пределах заданных диапазонов. Чистое запаздывание объекта, отрицательно влияющее на устойчивость системы управления, можно устранить из замкнутого контура системы с помощью регулятора, наилучшими для нашей системы являются ПИ- и ПИД-регуляторы, при этом передаточный коэффициент регулятора должен быть прямо пропорционален постоянным времени объекта и обратно пропорционален передаточному коэффициенту объекта и времени запаздывания.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Oбчислювальна техніка та автоматизація №1 (26)’2014
49
Список использованной литературы 1. Федюн Р.В. Принципы построения динамической модели процесса биохимической
водоочистки / Р.В. Федюн, В.А. Попов, Т.В. Найденова // Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація. - 2010. - Випуск 20 (158). – С. 30 – 37.
2. Федюн Р.В. Математична модель технологічного процесу біохімічного водоочищення / Р.В. Федюн , Т.В. Найдьонова , Р.В. Юрченко // Наукові праці Донецького національного технічного університету. Серія: Обчислювальна техніка та автоматизація. - 2012. - Випуск 22(200). - С. 48-55.
3. Дорф Р. Современные системы управления / Р. Дорф, Р. Бишоп. - М.: Лаборатория Базовых знаний, 2002. - 832 с.
4. Лукас В.А. Теория управления техническими системами: у[чебный курс для вузов]. - Екатеринбург: Издательство УГГГА, 2002. - 675 с.
5. Федюн Р.В. Дослідження динаміки САУ процесом біохімічного водоочищення / Р.В. Федюн, Т.В. Найдьонова // Наукові праці Донецького національного технічного університету. Серія: Обчислювальна техніка та автоматизація. - 2013. - Випуск 2(25). - С. 64-71.
6. Брагинский Л.Н. Моделирование аэрационных сооружений для очистки сточных вод / Л.Н. Брагинский, М.А. Евилевич. – Л.: Химия, 1980. – 144 с.
References 1. Fedyun, R.V., Popov, V.A. and Naydyenova,T.V. (2010), “Principles of construction of the
dynamic model of the process a biochemical water treatment”, Naukovi praci DonNTU. Serija: Obchysljuval'na tehnika ta avtomatyzacija, Donetsk, DonNTU, vol. 20 (158), pp. 30 – 37.
2. Fedyun, R.V., Naydyenova,T.V. and Yurchenko, R.V. (2012), “A mathematical model of the process of biochemical water treatment”, Naukovi praci DonNTU. Serija: Obchysljuval'na tehnika ta avtomatyzacija, Donetsk, DonNTU, vol. 22 (200), pp. 48 – 55.
3. Dorf, R. and Bishop, R. (2002), “Sovremennye sistemy upravlenija”, Moscow, Laboratorija Bazovyh znanij, Russia.
4. Lukas, V.A. (2002), “Teorija upravlenija tehnicheskimi sistemami”, Ekaterinburg, Izdatel'stvo UGGGA, Russia.
5. Fedyun, R.V., Naydyenova,T.V. (2013), “Research of dynamics of SAU by the process of biochemical waste water treatment”, Naukovi praci DonNTU. Serija: Obchysljuval'na tehnika ta avtomatyzacija, Donetsk, DonNTU, vol. 2 (25), pp. 64 – 71.
6. Bruginskij, L.N. and Evilevich, M.A. (1980), “Modelirovanie aeracionnih sooruzhenij for ochistki stochnih vod”, Leningrad, Himija, USSR.
Надійшла до редакції: Рецензент: 20.05.2014 д-р техн. наук, проф. Скобцов Ю.О.
Т.В. Найдьонова, Р.В.Федюн ДВНЗ «Донецький національний технічний університет» Синтез САУ процесом біохімічного водоочищення. Виконано синтез САУ процесом біохімічного водоочищення. Оскільки процес біохімічного водоочищення включає декілька складних процесів, то синтез САУК був проведений для трьох контурів. Були виявлені регульовані параметри – подача активного мулу та повітря, а також визначені збурюючи фактори: кількість стічних вод, які надходять до аеротенку, об’єм стічних вод в аеротенку, концентрація забруднень у вхідному потоці вод. Виконаний синтез системи управління компресорної та насосної установки. Обрані регулятори та визначено їх

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Oбчислювальна техніка та автоматизація №1 (26)’2014
50
параметри настройки. Виконане моделювання динамічних процесів в САУ підтвердило ефективність запропонованих законів управління. Ключові слова: біохімічне очищення стічних вод, синтез САУ, система автоматичного управління, ПІД- регулятор, регулятор Ресвіка, предікатор Сміта, математичне моделювання.
R.Fedyun, T.Naydyenova Donetsk National Technical University Synthesis of automatic control system of water biofiltration process. The control object is aerotank, where essential consumption of electric power is occurred. The water purification is carried out by microorganisms (active silt) and air, which is accordingly given by powerful compressors and pumps. Design of the effective automatic control system is impossible without deep research of characteristics and processes that flow in the control object. The synthesis of ACS of water biofiltration was performed. As the process of water biofiltration includes several complex processes, the synthesis of ACS was conducted for three basic contours. Control variables were defined: feed of active silt and air; perturbing factors were also defined: amount of effluent water coming to aerotank, volume of effluent water in aerator, concentration of contaminents in the input water stream. The synthesis of control system of compressor and pump installation was performed. The ideal regulators were considered for objects with a delay: Resvik regulator and Smith ideal regulator with preceding. For compressor and pump installation control PI-regulators are chosen and their tuning parameters are defined. For control in the whole control system of water biofiltration process PID-regulator was chosen.The analysis of general control circuit of treating facility showed that ACS works within the limits of specified bands. Object pure time delay that negatively influences on stability of control system is possible to remove from the system closed contour by means of regulator. PI- and PID-regulators are the most appropriate for the considered system, the transmission ratio of regulator must be directly proportional to time constant of object and inversely proportional to the ratio of object and delay time.The executed simulation of dynamic processes in ACS confirmed the efficiency of offered control laws. Keywords: effluent water biofiltration, synthesis of ACS, automatic control system, PID-regulator, Resvik regulator, Smith preceding, mathematic modeling.
Федюн Роман Валерьевич, Украина, закончил Донецкий национальный технический университет, канд. тех. наук, доцент, доцент кафедры автоматики и телекоммуникаций ГВУЗ «Донецкий национальный технический университет» (ул. Артема, 58, г. Донецк, 83001, Украина). Основное направление научной деятельности – моделирование и автоматическое управление технологическими процессами в промышленности.
Найденова Татьяна Владимировна, Украина, закончила Донецкий национальный технический университет, асистент кафедры автоматики и телекоммуникаций ГВУЗ «Донецкий национальный технический университет» (ул. Артема, 58, г. Донецк, 83001, Украина). Основное направление научной деятельности – моделирование и автоматическое управление технологическими процессами в промышленности.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
© Федюн Р.В., 2014 51
УДК 628.440.22
Р.В. Федюн (канд. техн. наук, доц.) ДВНЗ «Донецький національний технічний університет», м. Донецьк
кафедра автоматики та телекомунікацій e-mail: [email protected]
АВТОМАТИЧНЕ УПРАВЛІННЯ ЗАНУРЮВАЛЬНИМИ НАСОСАМИ ВОДОВІДЛИВУ ЛІКВІДОВАНИХ ШАХТ
Виконано аналіз особливостей водовідливу ліквідованих шахт із занурювальними насосами. Обґрунтовано необхідність роботи водовідливної установки в режимі стабілізації рівня в водозбірнику . Запропоновано модель водовідливної установки із занурювальними насосами, яка працює в режимі стабілізації рівня в водозбірнику - робота «на приплив». Виконаний аналіз результатів моделювання показав неможливість використання П- регуляторів і регуляторів, що містять інтегруючу складову. Показано, що необхідної якості управління можна досягти при використанні внутрішнього контуру стабілізації подачі насоса і використанні ПД- регулятора в основному контурі управління. Ключові слова: водовідлив, занурювальний насос, математична модель, стабілізація продуктивності, водозбірник, ПД-регулятор, коригувальний пристрій, стабілізація рівня, САУ.
Загальна постановка проблеми У цей час дуже гостро стоїть проблема закриття вугільних шахт – як економічно
неефективних, так і тих, що відпрацювала всі запаси вугілля. Однак не завжди ліквідацію шахти можна починати відразу з її фізичного закриття. Підземні води з ліквідованої шахти після її затоплення можуть мігрувати в сусідні шахти (якщо вони пов'язані з ліквідованою гірничими роботами), або виходити на поверхню.
Експлуатація водовідливних комплексів шахт, що закриваються, має свої особливості й відмінності, які необхідно враховувати при автоматизації даного технологічного процесу.
Принципова відмінність водовідливних комплексів шахт, що закриваються від працюючих в тому, що вони мають невеликий (у порівнянні з величиною припливу) об'єм водозбірника. Це приводить до необхідності організації роботи водовідливної установки з регульованою подачею для стабілізації рівня води у водозбірнику - робота «на приплив».
Ще однією особливістю даного об’єкту є застосування занурювальних насосів з необхідністю контролю підпору насосів та виключення їх роботи «на суху».
Необхідність розробки та дослідження системи автоматичного управління занурювальними насосами водовідливу пов’язана по-перше, із необхідністю організації роботи водовідливу «на приплив», по-друге, з необхідністю управління водовідливною установкою в перехідних режимах для виключення гідроударів та кидків тиску, по-третє, з неспроможністю існуючих САУ водовідливним комплексом забезпечити всі необхідні функції по контролю та управління водовідливним комплексом в умовах шахт, які закриваються [1,2].
Постановка задач дослідження Для розробки та дослідження системи автоматичного управління занурювальними
насосами водовідливу необхідно вирішити наступні завдання: - проаналізувати технічні та технологічні особливості занурювальних насосів, у тому
числі при використанні їх в умовах водовідливів вугільних шахт, які ліквідуються та вже ліквідовані;

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
52
- розробити математичну модель водовідливу занурювальними насосами та виконати дослідження динамічних процесів в об’єктів управління;
- виконати синтез необхідних алгоритмів управління з урахуванням динамічних властивостей занурювальних насосів та технологічних обмежень на процес водовідливу в умовах вугільних шахт, які ліквідуються та вже ліквідовані;
- оцінити ефективність запропонованих алгоритмів управління. Вирішення задач та результати досліджень. Розв’язання запропонованої науково-технічної задачі пропонується зробити на
прикладі ліквідованої шахти № 9 «Капітальна». Водовідливний комплекс розташовано на колишньому основному промисловому майданчику шахти № 9 «Капітальна». Шахти № 9 «Капітальна», № 6 «Червона Зірка», № 12 «Похила», «Лівенська-Заперевальна» і ім. 60-річчя Радянської України зв'язані між собою системою гірничих виробок, які при їхньому затопленні утворять єдиний водний басейн. Очікуваний приплив по шахті № 9 «Капітальна» - 340 м3/год. Комплекс водовідливу шахти № 9 «Капітальна» розрахований на можливість відкачки як власного максимального припливу, так і максимального припливу із шахти № 6 «Червона Зірка» з урахуванням надходження води із шахти ім. 60-річчя Радянської України (140 м3/год) – 290 м3/год: 340+290 = 630 м3/год. Геодезична висота нагнітання 170,5 м.
Позначка верхнього робочого рівня +10 м, нижнього робочого рівня +9 м, позначка критичного рівня +30 м. Відповідно до вимог «Правила безпеки у вугільних шахтах» для відкачки вищевказаного припливу в скіповому стовбурі встановлено три насосних агрегати типу АНПШ 375-250: два агрегати - робочі, один - резервний, відкачка здійснюється по 3-м напірних трубопроводах діаметром 273х11,4 які підвішені в стовбурі (рис.1).
Рисунок 1 - Автоматичне управління робочим режимом водовідливної установки
Розглянувши технологічну схему водовідливного комплексу шахти № 9 «Капітальна»
(рис.1) можна відзначити наступні особливості, які необхідно враховувати при розробці та дослідженні системи автоматичного управління.
Відповідно до інструкції на експлуатацію насосного агрегату заводу-виготовлювача оптимальним режимом роботи агрегату є тривалий режим без зупинок, за умови експлуатації в робочому діапазоні подач агрегату. Найбільш кращою є робота водовідливу в режимі безперервної відкачки води – «робота на приплив» з відповідним регулюванням подачі насосних агрегатів. Для умов водовідливу шахти № 9 «Капітальна» необхідність даного

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
53
режиму роботи також обґрунтовується невеликим об'ємом води, що може поміститися між позначками верхнього й нижнього рівня. Об'єм води між позначками верхнього й нижнього рівнів становить усього 8 % від годинного припливу. Таке співвідношення між об'ємом водозбірника й величиною припливу при управлінні водовідливом у функції рівня води у водозбірнику призведе до частих пусків і зупинок насосного агрегату, що негативно відіб'ється на роботі водовідливної установки.
За рекомендацією заводу-виготовлювача насосів при організації водовідливу за схемою періодичної роботи агрегатів необхідно збільшувати тривалість циклу безперервної роботи агрегату, експлуатуючи його при менших значеннях витрати в межах робочого діапазону. При цьому необхідно врахувати, що число вмикань агрегату не повинне становити більше 3-х у добу з інтервалом не менш 60 хв.
При розробці моделі об'єкта управління й побудові системи автоматичного управління водовідливним комплексом необхідно врахувати можливість застосування двох способів управління - зміна частоти обертання приводного електродвигуна і дроселювання нагнітального трубопроводу керованою засувкою [1,2].
З урахуванням вищевикладених особливостей організації водовідливу занурювальними насосами пропонується схема автоматичного управління робочим режимом водовідливної установки, яка приведена на рис.1. Перший контур призначений для регулювання подачі насосної установки при стабілізації рівня води у водозбірнику. Він включає наступні елементи (рис.1): датчик рівня ДР, датчик витрати ДВ, тиристорний перетворювач частоти ТПЧ і регулятор у блоці управління БУ, що реалізує необхідний алгоритм. Управління реалізоване по відхиленню рівня води у водозбірнику, інформацію про яке видає датчик рівня. Також реалізовано внутрішній зворотний зв'язок для стабілізації витрати води.
Другий контур призначений для плавного запуску (зупинки) насосного агрегату на закриту засувку, а також плавного, що виключає гідроудари й кидки тиску відкриття (закриття) керованої засувки. Він складається з датчика тиску ДТ, керованої засувки КЗ і регулятора в блоці управління БУ, що реалізує необхідний алгоритм управління керованою засувкою.
На підставі рис.1 і принципу роботи контуру регулювання подачі насоса отримана його структурна схема, що приведена на рис.2. Об'єкт регулювання в САУ водовідливною установкою – водозбірник з передаточною функцією WВ(р), а його вихідний параметр – рівень води НР(t), який необхідно підтримувати постійним шляхом зміни подачі QH(t) насоса WН(р). Збурюючим впливом являється приплив води QП(t). Диференціальне рівняння даного об'єкта має вигляд:
))()(()( tQtQk
dttdH
HПВУ , (1)
де dttdHУ )( – швидкість зміни рівня у водозбірнику, м/с; QП(t) – приплив води, м3/год; QH(t) – подача насоса, м3/год; kВ – коефіцієнт передачі об'єкта управління:
FkВ
1 , (2)
де F – площа водозбірника, м2. З огляду на, те що площа водозбірника складає 12 м2, kВ = 0.1. Застосувавши перетворення Лапласа до рівняння (1), отримано рівняння динаміки
об'єкта управління - водозбірника в операторній формі:
))()(()( pQpQp
kpH HПВ
У . (3)

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
54
)(tQf ПQП
)(tHP)(tu
Рисунок 2 – Структурна схема САУ стабілізації рівня
Насос WН(р) (рис.2) характеризується кутовою швидкістю робочого колеса на вході й
подачею QH(t) на виході. Він може бути представлений аперіодичною ланкою першого порядку з передаточною функцією [3,4]:
1)(
pTkpW
H
H , (4)
де kН – коефіцієнт передачі насоса:
ном
номH
HQk
,
де номHQ – номінальна подача насоса, м3/з; ном – номінальна кутова швидкість робочого колеса, рад/с.
Постійна часу ТН шахтних відцентрових насосів розглянутої потужності становить 5 сек [5,6].
Робочий режим приводного трифазного асинхронного електродвигуна з короткозамкненим ротором можна змінювати різними способами. Найбільш прийнятним способом управління асинхронним електродвигуном виступає зміна частоти живлячої напруги. Виходячи із цього способу управління визначено математичний опис, передаточні функції й структурна схема моделі приводного електродвигуна WЕД(p). Необхідно відзначити те, що механічна характеристика має нелінійний характер, але для малих прирощень на робочій ділянці механічної характеристики рівняння можна лінеаризовати [7]:
;1)(
)(
pTh
pwpM
ýë
u (5)
;1)()(
)(ðTpMpM
pwìc
(6)
де kном
ku sw
Mh
1
2 , kном
эл swT
1
1 , JTì , (7)
kM - критичний момент; ks - критичне сковзання; J - момент інерції;
номw1 - кутова частота статора при номінальній частоті живлячої напруги номf1 ; Якщо навантаженням для ротора електродвигуна є відцентровий насос, то
)()()()(
2 pwpPpQpM c
(8)
де )( pQ - зміна подачі насоса,
)( pP - тиск насосу,
)(2 pw - кругова частота обертання вала насоса.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
55
Використовуючи отримані рівняння (5) і (6), отримуємо структурну схему моделі приводного електродвигуна [7], що приведена на рис.3.
Рисунок 3 – Структурна схема асинхронного електродвигуна
Тиристорний перетворювач частоти по своїх динамічних властивостях відповідає
підсилювальній ланці з передаточною функцією: ТПЧ)( kpWТПЧ . (9)
Водовідливна установка як об'єкт регулювання рівня води у водозбірнику є інтегруючою ланкою. Відомо, що застосування законів регулювання, що містять інтегральну складову (І, ПІ, ПІД) на такому об'єкті неприйнятно за умовами стійкості. Добрі результати з погляду стійкості процесу регулювання забезпечуються пропорційним П-регулятором. Єдиним параметром настроювання П-регулятора є коефіцієнт підсилення kП.
Підставивши в структурну схему (рис.2) отримані передаточні функції (3) – (9) одержимо модель САУ водовідливної установки при роботі на «приплив» із пропорційним управлінням, якщо WР(p)=kР, WКУ(p)=kКУ (рис.4). Зміна припливу моделюється зміною параметрів блоку Step 1.
Моделювання перехідних процесів у САУ водовідливної установки здійснювалося в пакеті simulink програмного комплексу Matlab. На рис.5,а. приведена крива зміни рівня у водозбірнику при ступінчастому збільшенні припливу на 30% у момент часу t=100 сек, на рис.5,б. при ступінчастому зменшенні припливу на 30%.
Рисунок 4 - Модель САУ водовідливною установкою при роботі «на приплив» із
пропорційним управлінням
Аналіз приведених кривих (рис.5) показує незадовільну якість управління. Згідно з вимогами заводу-виготовлювача насосів та «Правилам безпеки у вугільних шахтах» рівень у водозбірнику повинен підтримуватися в межах від +9 м до +10 м. У запропонованій САУ це не виконується ні при збільшенні припливу, ні при його зменшенні. Особливо небезпечне зменшення рівня води менше +8 м, тому що при цьому не витримується необхідний для нормальної роботи заглибного насоса підпір +5м. Таким чином, дана САУ має незадовільну точність у сталому режимі. Зміна настроювання пропорційного закону управління kП не дає необхідних результатів. Для вирішення даної проблеми пропонується ввести в САУ внутрішній контур стабілізації подачі насоса, а також вибрати та налаштувати інший закон управління.
- сМ
рT М
1
1 рTh
ЭЛ
u 1
-
М

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
56
а) б)
Рисунок 5 - Зміна рівня у водозбірнику при збільшенні припливу на 30% (а) та при зменшені припливу на 30% (б) в момент часу t=100 сек і пропорційному управлінні
Структурна схема САУ водовідливною установкою при роботі «на приплив» з
контуром стабілізації подачі приведена на рис.6. Внутрішній контур стабілізації подачі насоса складається із трьох ланок: датчика витрати води WДВ(p), трубопроводу WТР(p), корегуючого пристрою WКП(p).
Датчик витрати WДВ(p) можна представити підсилювальною ланкою, тому що його постійна часу дуже мала в порівнянні з постійними часу інших елементів САУ.
)(tQf ПQП
)(tH P)(tu
Рисунок 6 - Структурна схема САУ водовідливною установкою при роботі на «приплив» с
внутрішнім контуром стабілізації подачі насоса
Особливість технологічної схеми водовідливу заглибними насосами полягає в тому, що датчики витрати й тиску встановлюють не на виході насоса, а на трубопроводі на відстані 40 м від насоса. Ділянка трубопроводу між насосом і точкою установки датчика витрати води в динамічному відношенні є інерційною ланкою першого порядку з передаточною функцією WТР(p) [6]:
11)(
pT
pWTP
ТР . (10)
При такій довжині трубопроводу постійна часу становить 8 сек [6]. Для поліпшення показників якості пропонується ввести складову, що диференціює, у
закон управління й таким чином, отримати ПД-регулятор з наступною передаточною функцією:

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
57
pTkpW Дpp )( , (11) де kp і ТД – настроювальні параметри ПД-регулятора.
Створення ПД-регулятора вимагає реалізованої передаточної функції, тому зазвичай до диференціювання додається полюс:
1)(
pрТ
kpWД
ДpP
. (12)
Застосувавши метод оптимізації амплітудної характеристики для розрахунку настроювальних параметрів ПД-регулятора [8], одержали наступну передаточну функцію регулятора:
12,0301,1)(
pрpWP . (13)
Коригувальний пристрій у контурі стабілізації подачі насоса (рис.6) пропонується реалізувати у вигляді ланки з наступною передаточною функцією:
11)(
2
1
pTpTkpW kКУ , (14)
де kk , 1T і 2T - настроювальні параметри коригувального пристрою. На підставі методики синтезу коригувальних пристроїв [9] отримана наступна
передаточна функція коригувального пристрою:
111,04,0)(
p
ppWКУ . (15)
Підставивши в структурну схему (рис.6) отримані передаточні функції (3) - (9), (13), (15) отримаємо модель САУ водовідливної установки при роботі на «приплив» із внутрішнім контуром стабілізації подачі й ПД-регулятором (рис.7).
Рисунок 7 - Модель САУ водовідливної установки при роботі на «приплив» із внутрішнім
контуром стабілізації подачі й ПД-регулятором На рис.8,а приведена крива зміни рівня у водозбірнику при ступінчастому збільшенні
припливу на 30% у момент часу t=100 сек, на рис.8,б при зменшенні припливу на 30%. Аналіз приведених кривих (рис.8) показує задовільну якість управління. Стала помилка дорівнює нулю, як при збільшенні, так і при зменшенні збурюючої дії припливу, що повністю відповідає вимогам заводу-виготовлювача насосів та «Правил безпеки у вугільних шахтах». У перехідних режимах коливання рівня не виходять за необхідні межі від +9 м до +10 м.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
58
а) б)
Рисунок 8 - Зміна рівня у водозбірнику при збільшенні припливу на 30% (а) та при зменшені припливу на 30% (б) в момент часу t=100 сек із внутрішнім контуром стабілізації подачі й
ПД-регулятором Висновки 1. Виконаний аналіз характеристик занурювальних насосів, що працюють в умовах
водовідливів вугільних шахт, які ліквідуються та вже ліквідовані дозволив визначити технічні й технологічні особливості, які впливають на розробку та дослідження системи автоматичного управління даним об’єктом.
2. Запропонована математична модель водовідливної установки із занурювальними насосами, яка працює з регулюванням продуктивності – робота «на приплив», дозволила виконати дослідження динамічних режимів в об’єкті управління та формалізувати процеси синтезу регуляторів й корегувальних пристроїв.
3. Проведений на основі результатів моделювання аналіз динамічних властивостей розглянутого об’єкта показав неможливість використання П-регуляторів та регуляторів, що містять інтегруючу складову в алгоритмі управління.
4. Проведені дослідження показали, що для досягнення потрібних показників якості управління необхідно ввести в САУ внутрішній контур стабілізації продуктивності та використовувати ПД-регулятор в основному контурі стабілізації рівня.
Список використаної літератури 1. Бессараб В.И. Проблемы автоматизации водоотлива глубоких шахт с повышенной
водообильностью / В.И. Бессараб , Р.В. Федюн , В.В. Турупалов // Вестник НТУ „ХПИ”. Сборник научных трудов. Тематический выпуск „Системный анализ, управление и информационные технологии”. - 2005. - №54. - С. 106-111.
2. Бессараб В.И. Управление шахтной водоотливной установкой в аварийных и аномальных режимах работы / В.И. Бессараб, Р.В. Федюн, В.А. Попов // Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація. - 2006. - Випуск 106. - С. 26 – 33.
3. Федюн Р.В. Автоматичне управління гідравлічними параметрами системи водопостачання / Р.В. Федюн, В.О. Попов, В.О. Бунєєв // Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація. - 2008. - Випуск 14 (129). – С. 54 – 63.
4. Федюн Р.В. Система автоматического управления электронасосом водопроводного узла. / Р.В. Федюн, В.А. Бунеев // Наукові праці ДонНТУ. Серія: Електротехніка і енергетика. - 2008. - Випуск 8 (140). – С. 187 – 190.
5. Бессараб В.И. Динамическая модель многоступенчатого водоотлива угольных шахт / В.И. Бессараб , Р.В. Федюн // Наукові праці ДонДТУ. Серія: Гірнича електромеханіка. - 2000. - Випуск 16. – С. 19 – 25.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
59
6. Тимошенко Г.М. Научные основы проектирования и эксплуатации насосных установок в переходных режимах / Г.М. Тимошенко. - Киев; Донецк: Вища шк. Головное изд-во, 1986. - 127с.
7. Жукова Н. В. Асинхронный регулируемый электропривод на основе его линейной модели / Н. В. Жукова // Наукові праці Донецького національного технічного університету. Серія "Електротехніка і енергетика". – 2011. - № 11 (186). – С. 125-132.
8. Лукас В. А. Теория автоматического управления / В. А. Лукас. – М.: Недра, 1990. – 416 с. 9. Чернышев Н.Н. Синтез компенсаторов для комбинированных систем автоматического
регулирования / Н.Н. Чернышев // Збірник наукових праць Донецького інституту залізничного транспорту. Серія Автоматика, телемеханіка, зв'язок. – 2012. – Випуск 32. – С. 52-57.
10. Червинский В.В. Многоуровневая система управления комплексом водоотлива горнодобывающего предприятия / В.В. Червинский, В.И. Бессараб, Н.В. Червинская // Наукові праці Донецького національного технічного університету. Серія: “Обчислювальна техніка та автоматизація”. - 2008. - Випуск 129(14). - С. 53-58.
References 1. Bessarab, V.I., Fedyun, R.V. and Turupalov, V.V. (2005), “Automation Problems drainage
deep mines with increased watery”, Vestnik NTU „HPI”. Sbornik nauchnyh trudov. Tematicheskij vypusk „Sistemnyj analiz, upravlenie i informacionnye tehnologii”, Kharkiv, vol. 54, pp. 106-111.
2. Bessarab, V.I., Fedyun, R.V. and Popov, V.A. (2006), “Control mine drainage installation in emergency and abnormal operating conditions”, Naukovi praci DonNTU. Serija: Obchysljuval'na tehnika ta avtomatyzacija, Donetsk, DonNTU, vol. 106, pp. 26-33.
3. Fedyun, R.V., Popov, V.A. and Buneev, V.A. (2008), ”Automatic control by hydraulic parameters of the water supply system”, Naukovi praci DonNTU. Serija: Obchysljuval'na tehnika ta avtomatyzacija, Donetsk, DonNTU, vol. 14 (129), pp. 54 – 63.
4. Fedyun, R.V. and Buneev, V.A. (2008), “Automatic control system of the electric pump plumbing node”, Naukovi praci DonNTU. Serija: Elektrotehnika i energetyka, Donetsk, DonNTU, vol. 8 (140), pp. 187 – 190.
5. Bessarab, V.I. and Fedyun, R.V. (2000), “Dynamic model of multistage water drainage coal mines”, Naukovi praci DonSTU. Serija: Girnycha elektromehanika, Donetsk, DonSTU, vol. 16, pp. 19 – 25.
6. Tymoshenko, G.M. (1986), Nauchnye osnovy proektirovanija i jekspluatacii nasosnyh ustanovok v perehodnyh rezhimah, Kiev; Donetsk: Vishha shk. Golovnoe izd-vo.
7. Zhukova, N.V. (2011), “Asynchronous Regulated Electric Drive Based on Its Linear Modal”, Naukovi praci DonNTU. Serija: Elektrotehnika i energetyka, Donetsk, DonNTU, vol. 11 (186), pp. 125-132.
8. Lukas, V.A. (1990) “Teorija avtomaticheskogo upravlenija”, Nedra, Moscow. 9. Chernyshev, N.N. (2012), “Synthesis compensators for combined automatic control systems”,
Zbirnyk naukovyh prac' Donec'kogo instytutu zaliznychnogo transportu. Serija; Avtomatyka, telemehanika, zv'jazok, Donec'k: DonIZT, vol. 32, pp. 52-57.
10. Chervinskij, V.V., Bessarab, V.I. and Chervinskaja, N.V. (2008), “Multilevel control system for the water drainage of the mining enterprise”, Naukovi praci DonNTU. Serija: Obchysljuval'na tehnika ta avtomatyzacija, Donetsk, DonNTU, vol. 129(14), pp.53-58.
Надійшла до редакції: Рецензент: 28.03.2014 д-р техн. наук, проф. Скобцов Ю.О.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
60
Р.В. Федюн ГВУЗ «Донецкий национальный технический университет» Автоматическое управление погружными насосами водоотлива ликвидированных шахт. Выполнен анализ особенностей водоотлива ликвидированных шахт с погружными насосами. Обоснована необходимость работы водоотливной установки в режиме стабилизации уровня в водосборнике. Предложена модель водоотливной установки с погружными насосами, которая работает в режиме стабилизации уровня в водосборнике – работа «на приток». Выполненный анализ результатов моделирования показал невозможность использования П-регуляторов и регуляторов, содержащих интегрирующую составляющую. Показано, что необходимое качество управления можно достичь при использовании внутреннего контура стабилизации подачи насоса и использовании ПД-регулятора в основном контуре управления. Ключевые слова: водоотлив, погружной насос, математическая модель, стабилизация производительности, водосборник, ПД-регулятор, корректирующее устройство, стабилизация уровня, САУ.
R.V. Fedyun Donetsk National Technical University Automatic control of submersible pumps for abandoned mines drainage. The analysis of the features of abandoned mine drainage with submersible pumps was made. The differences in dewatering of operating and abandoned mines were considered. The principal difference of closing mines drainage systems from operating mines is that they have small (compared to the inflow) header volume. This leads to the need to organize the work of a sump installation with adjustable supply to stabilize the water level in the sump - the work "on the inflow". Another feature of this facility is using submersible pumps with the need to control pumps backwater and exception of their work "on dry". The necessity of drainage installation work in the mode of stabilization of the level in the sump was proved. We offer a model of a drainage installation with submersible pumps, which operates in the stabilization mode - the work "on the inflow". We obtained models of drive induction motor, submersible pump, pipeline. The modeling of dynamic processes in ACS drainage installation during the work "on the inflow" was made. The simulation resulted in diagrams of changes in the level of sump under influx changes. The analysis of the simulation results demonstrated the impossibility of using P-controllers and regulators containing an integrating component to obtain the required quality parameters. We propose to introduce the inner loop of pump stabilization into the system of automatic control. Synthesis of a correcting device was carried out for this circuit. In the main loop of ACS-level stabilization in the sump it is proposed to use PD-controller. The desired settings for this controller were selected. The modeling of the process of the level change in the sump in a two-ACS with PD-controller was made. Analysis of simulation results showed the effect of these decisions. The change in the sump level corresponds to technical and technological requirements. Keywords: dewatering, submersible pump, mathematical model, stabilization performance header, PD-controller, correcting device, stabilization level, ACS.
Федюн Роман Валерьевич, Украина, закончил Донецкий национальный технический университет, канд. техн. наук, доцент, доцент кафедры автоматики и телекоммуникаций ГВУЗ «Донецкий национальный технический университет» (ул. Артема, 58, г. Донецк, 83001, Украина). Основное направление научной деятельности – моделирование и автоматическое управление технологическими процессами в промышленности
.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
61
УДК 622; 519.2
А.М. Гарматенко (аспирант) ГВУЗ «Донецкий национальный технический университет», г. Донецк
кафедра автоматики и телекоммуникаций e-mail: [email protected]
АЛГОРИТМ ПОИСКА КРАТКОВРЕМЕННОЙ ПАМЯТИ В ДАННЫХ АКУСТИЧЕСКОЙ ЭМИССИИ УГОЛЬНЫХ ПЛАСТОВ
Исследуется вопрос обеспечения безопасности ведения мероприятий по добыче угля. Обоснована причина модернизации существующих или разработка новых технических средств прогноза безопасности ведения горных работ. Обоснована причина поиска кратковременной памяти в данных об активности импульсов акустической эмиссии (АЭ) угольных пластов. Предложен алгоритм поиска кратковременной памяти в импульсах АЭ. Поставлен критерий оптимальности работы алгоритма для решаемой задачи. Получены и проанализированы результаты работы алгоритма. Ключевые слова: АЭ, безопасность, шахта, кратковременная память.
Постановка проблемы В настоящее время главной проблемой горнодобывающих предприятий Украины
является вопрос обеспечения безопасности ведения мероприятий по добыче угля, который до сих пор является нерешенным. Весомой причиной существования данной проблемы является увеличение объемов выработки угля и увеличение глубины горных работ [1], что в свою очередь приводит к возникновению в призабойной части пласта газодинамических явлений. Следствием существования газодинамических явлений при подземной выработке угля является постоянное и быстрое изменение (как правило, увеличение) горного давления и газоносности массива [2]. Так, по данным Госдепартамента промышленной безопасности, охраны труда и горного надзора МЧС за последние пять лет (с 2008 по 2013 гг.) на украинских горнодобывающих предприятиях в результате проявления газодинамических явлений пострадали 105 человек (90 из которых погибли) [3].
Низкий уровень безопасности на шахтах Украины напрямую определяет несовершенство используемых в данное время методик прогноза, которые используют специальные службы прогноза. Следует заметить, что качество прогноза выбросов горных пород также зависит и от эффективности технических средств контроля состояния призабойной части массива. Несовершенство последних ставит главным модернизацию существующих или разработку новых [4], с помощью которых можно будет повысить уровень безопасности ведения мероприятий по добыче угля.
Газодинамические процессы, которые возникают в угольных пластах, постоянно влияют на их прочностные характеристики, результатом чего является возникновение трещин [5]. Следует принимать во внимание тот факт, что сила, с которой верхний слой Земли давит на угольный пласт, достигает огромных значений, а давление газа между слоистыми структурами угольного пласта, накопившегося за миллионы лет формирования угленосного слоя Земли, также велико. Поэтому любое воздействие на угольный пласт в процессе добычи угля приводит к тому, что из огромного количества меньших по размеру трещин возникают трещины нового энергетического уровня (трещины большего размера). Тут можно наблюдать иерархическую структуру. Одним из средств, с использованием которого можно проследить процесс формирования трещин, является метод АЭ [6, 7]. Метод АЭ позволяет улавливать упругие акустические импульсы, возникающие при образовании

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
62
трещин. Таким образом, основываясь на данных, полученных с использованием данного метода, можно говорить о прочностных характеристиках массива.
Характерной особенностью набора данных о количестве зафиксированных акустических импульсов является их корреляционная зависимость на определенных интервалах времени [8]. Другими словами, характер изменения прочностных характеристик угледобывающего участка массива подчиняется некой закономерности, то есть имеет своего рода память. С точки зрения физики и динамики процесса добычи угля [9], ценной информацией является кратковременное ее проявление (кратковременная память). Это обусловлено большими значениями мгновенной скорости, сложностью и нестационарностью газодинамических процессов, происходящих в шахте. И поиск корреляционных зависимостей на больших интервалах времени не является корректным.
Цель работы Повышение эффективности анализа данных АЭ угольных пластов за счет разработки
алгоритма поиска кратковременной памяти. Постановка задачи Разработать алгоритм поиска кратковременной памяти на основе анализа данных АЭ
угольных пластов; проанализировать его работу при разной степени активности импульсов АЭ.
Решение задачи и результаты исследований Основу алгоритма составляет корреляционный анализ и математические основы теории
вероятности и математической статистики. Общая структура алгоритма представлена в виде трех этапов.
Первый этап получения данных состоит в следующем: задается скользящее окно длиной А, и внутри каждого окна в течение всего исходного набора данных (для достижения максимальной разрешающей способности результатов шаг смещения равен 1) рассчитывается интервал корреляции (1) [10]. При достижении конца исследуемого ряда выполняется агрегирование набора данных по формуле 2 [11]. Процесс будет выполняться до тех пор, пока не достигнут предельно заданный уровень агрегирования.
N
iii r
1 , (1)
где ir - значение автокорреляционной функции в i -й точке; N - длины автокорреляционной функции;
i - интервал корреляции в i -м скользящем окне.
1
,nm
mi
ij n
yY (2)
где iy - i -е значение в данных о количестве зафиксированных импульсов АЭ; m - начальная точка скользящего окна; n - уровень агрегирования;
jY - j -е значение в агрегированных данных о количестве зафиксированных импульсов АЭ.
Второй этап: рассчитываются два коэффициента вариации интервалов корреляции по формулам 3, 4 [11]. Отличия результатов двух коэффициентов небольшие, однако при неравномерном распределении величин интервалов корреляции ценность для анализа представляет коэффициент вариации, рассчитанный по формуле 4.
,
:1:1NМОNСКОKМО
(3)

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
63
где . - i -е значение интервала корреляции; N - длина массива интервалов корреляции;
NСКО :1 - среднеквадратическое отклонение интервала корреляции; NМО :1 - математическое ожидание интервала корреляции;
МОK - коэффициент вариации интервала корреляции.
,
:1:1NP
NСКОKP
(4)
где NР :1 - медиана интервала корреляции;
PK - коэффициент вариации интервала корреляции. Третий этап состоит в анализе полученных результатов и будет показан ниже. Следует отметить, что проявление кратковременной памяти следует производить на
интервалах данных от 30 минут до 12 часов / 720 мин. Это обусловлено сложностью и нестационарностью газодинамических процессов, происходящих в шахте. Также следует брать во внимание скорость выработки угля, иными словами, за период 12 часов место выработки угля существенно изменяется. А искусственно рассчитанная корреляционная зависимость в данных на интервале больше 12 часов будет представлять собой ни что иное, как проявление ложных зависимостей и ничего общего с процессом, происходящим сейчас, представлять не будет.
Задача агрегирования данных состоит в удалении производственных шумов или ошибок снятия данных. Это работает следующим образом: внося некую задержку в данные, повышается доля в них низкочастотной составляющей и уменьшается доля высокочастотной, то есть мы имеем дело с фильтром низких частот. Величина уровня агрегирования, как правило, зависит от частоты дискретизации исходных данных, но также следует учитывать тот факт, что процедура агрегирования приводит к искажению данных. Таким образом, критерием оптимальности работы алгоритма для решаемой задачи является минимум значения коэффициентов вариации при:
- минимально возможном значении уровня агрегирования; - минимально возможном значении длина скользящего окна; - максимально возможном значении интервала корреляции. В исследовании задействованы данные об импульсах АЭ, зафиксированных на одной
из угольных шахт Украины за период 30 дней (см. рис. 1).
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 310
5
10
15
20
25
Время получения данных, дни
Коли
чест
во и
мпул
ьсов
АЭ
Точка 1
Точка 2
Точка 3
Рисунок 1 – Исходные данные об активности импульсов АЭ
Для анализа в исходном ряде данных будут выделены 3 точки старта (см. рис. 1). Точка
1 будет завершать 13-й день получения данных, точка 2 – 17-й день и точка 3 – 20-й день.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
64
Логика выбора точек состоит в следующем: конец 13-го дня (точка 1) характеризуется началом увеличения активности фиксируемых импульсов АЭ, что приводит к формированию длительного участка с большой активностью импульсов АЭ (точка 2). В точке 3 (конец 20-го дня) завершается период высокой активности фиксируемых импульсов и начинается период, схожий по характеру изменения активности с тем, который наблюдался до точки 1. Задачи исследования:
1) зафиксировать наличие кратковременной памяти в импульсах АЭ при разных характерах изменения активности импульсов АЭ;
2) определить минимально необходимый объем данных (импульсов АЭ), которого будет достаточно для решения задачи 1.
Одним из требований проведения прогноза выбросоопасностей в угольном массиве является максимально быстрое вовлечение системы прогнозирования в технологический процесс, что явно зависит от объема входных данных. Поэтому, требования для решения этих задач будут сводиться к не только поставленному выше критерию оптимальности, но и минимизации выходных данных, получаемых при решении задачи 2.
В результате работы алгоритма были получены следующие результаты (см. табл. 1, 2, 3).
Таблица 1
Результаты работы алгоритма поиска кратковременной памяти для точки 1 объем входных
данных, дни / мин интервал корреляции,
мин уровень
агрегирования длина скользящего
окна, мин 1 / 1440 60 3 580 2 / 2880 60 3 670 3 / 4320 60 4 720 4 / 5760 60 4 650 5 / 7200 60 4 620
Таблица 2
Результаты работы алгоритма поиска кратковременной памяти для точки 2 объем входных
данных, дни / мин интервал корреляции,
мин уровень
агрегирования длина скользящего
окна, мин 1 / 1440 90 4 700 2 / 2880 100 4 720 3 / 4320 80 4 720 4 / 5760 70 4 720
Таблица 3
Результаты работы алгоритма поиска кратковременной памяти для точки 3 объем входных
данных, дни / мин интервал корреляции,
мин уровень
агрегирования длина скользящего
окна, мин 1 / 1440 80 4 680 2 / 2880 70 4 690 3 / 4320 70 4 720 4 / 5760 70 4 720
В таблицах выше показаны результаты работы алгоритма, а именно: объем входных
данных, в которых осуществляется поиск кратковременной памяти; интервал корреляции, под которых подразумевается в решаемой задаче величина кратковременной памяти; уровень агрегирования данных, позволяющий модифицировать данные в наиболее
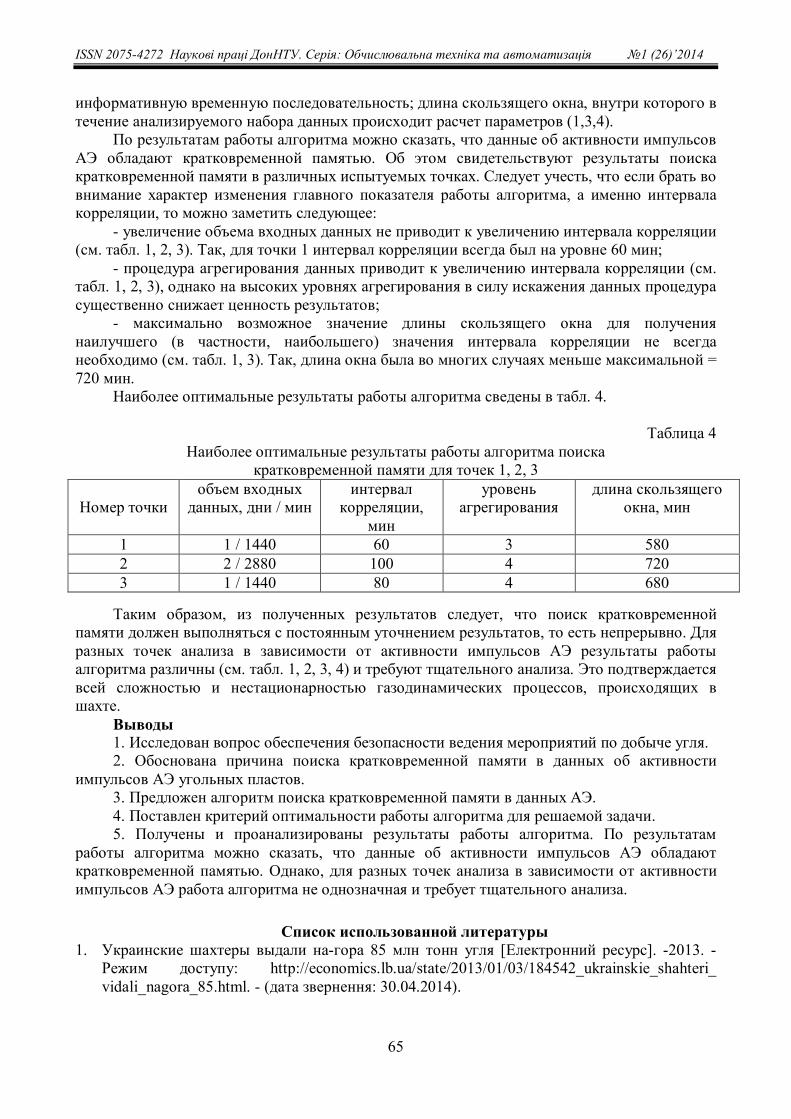
ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
65
информативную временную последовательность; длина скользящего окна, внутри которого в течение анализируемого набора данных происходит расчет параметров (1,3,4).
По результатам работы алгоритма можно сказать, что данные об активности импульсов АЭ обладают кратковременной памятью. Об этом свидетельствуют результаты поиска кратковременной памяти в различных испытуемых точках. Следует учесть, что если брать во внимание характер изменения главного показателя работы алгоритма, а именно интервала корреляции, то можно заметить следующее:
- увеличение объема входных данных не приводит к увеличению интервала корреляции (см. табл. 1, 2, 3). Так, для точки 1 интервал корреляции всегда был на уровне 60 мин;
- процедура агрегирования данных приводит к увеличению интервала корреляции (см. табл. 1, 2, 3), однако на высоких уровнях агрегирования в силу искажения данных процедура существенно снижает ценность результатов;
- максимально возможное значение длины скользящего окна для получения наилучшего (в частности, наибольшего) значения интервала корреляции не всегда необходимо (см. табл. 1, 3). Так, длина окна была во многих случаях меньше максимальной = 720 мин.
Наиболее оптимальные результаты работы алгоритма сведены в табл. 4.
Таблица 4 Наиболее оптимальные результаты работы алгоритма поиска
кратковременной памяти для точек 1, 2, 3
Номер точки объем входных
данных, дни / мин интервал
корреляции, мин
уровень агрегирования
длина скользящего окна, мин
1 1 / 1440 60 3 580 2 2 / 2880 100 4 720 3 1 / 1440 80 4 680
Таким образом, из полученных результатов следует, что поиск кратковременной
памяти должен выполняться с постоянным уточнением результатов, то есть непрерывно. Для разных точек анализа в зависимости от активности импульсов АЭ результаты работы алгоритма различны (см. табл. 1, 2, 3, 4) и требуют тщательного анализа. Это подтверждается всей сложностью и нестационарностью газодинамических процессов, происходящих в шахте.
Выводы 1. Исследован вопрос обеспечения безопасности ведения мероприятий по добыче угля. 2. Обоснована причина поиска кратковременной памяти в данных об активности
импульсов АЭ угольных пластов. 3. Предложен алгоритм поиска кратковременной памяти в данных АЭ. 4. Поставлен критерий оптимальности работы алгоритма для решаемой задачи. 5. Получены и проанализированы результаты работы алгоритма. По результатам
работы алгоритма можно сказать, что данные об активности импульсов АЭ обладают кратковременной памятью. Однако, для разных точек анализа в зависимости от активности импульсов АЭ работа алгоритма не однозначная и требует тщательного анализа.
Список использованной литературы 1. Украинские шахтеры выдали на-гора 85 млн тонн угля [Електронний ресурс]. -2013. -
Режим доступу: http://economics.lb.ua/state/2013/01/03/184542_ukrainskie_shahteri_ vidali_nagora_85.html. - (дата звернення: 30.04.2014).

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
66
2. Маловичко А.А. Горные удары / А.А. Маловичко // Природные опасности России. - М.: Крук, 2000. - 296 с.
3. Список: Аварии на шахтах Украины [Електронний ресурс]. - 2014. - Режим доступу: http://miningwiki.ru/wiki/%D0%A1%D0%BF%D0%B8%D1%81%D0%BE%D0%BA:%D0%90%D0%B2%D0%B0%D1%80%D0%B8%D0%B8_%D0%BD%D0%B0_%D1%88%D0%B0%D1%85%D1%82%D0%B0%D1%85_%D0%A3%D0%BA%D1%80%D0%B0%D0%B8%D0%BD%D1%8B. - (дата звернення: 30.04.2014).
4. Дегтяренко І.В. Розробка та дослідження методів автоматизованого аналізу даних акустичної емісії вугільних пластів / І.В. Дегтяренко, О.М. Гарматенко // Науково-практична конференція Всеукраїнського конкурсу студентських наукових робіт за напрямом «Інформатика, обчислювальна техніка та автоматизація». – Севастопіль: СевНТУ, 2012. – С. 46-50.
5. Кулаков Г.И. Акустическая эмиссия и стадии процесса трещинообразования горных пород / Г.И. Кулаков, Г.Е. Яковицкий // Физико-технические проблемы разработки полезных ископаемых. - 1993. - № 2. - С. 11-15.
6. Деглин Б.М. Испытания экспериментального образца звукоулавливающей аппаратуры «ЗУА-98» / Б.М. Деглін, А.А. Мелконян, В.Л. Овчаренко // Журнал «Уголь Украины». - 1999. - № 1 - С. 26-34.
7. Виноградов С.Д. Акустические наблюдения процессов разрушения горных пород / С.Д. Виноградов. - М.: Наука, 1964. - 84 с.
8. Дегтяренко І.В. Оцінка показника Херста даних акустичної емісії вугільних пластів / І.В. Дегтяренко, О.М. Гарматенко // Материалі 16 международного молодежного форума «Радиоэлектроника и молодеж в 21 веке». Международная конференция «Радиоэлектронное приборостроение как основа высокотехнологического обновления всех отраслей производства». – Харків: ХНУРЕ, 2012. – С. 216-217.
9. Гарматенко А.М. Алгоритм поиска кратковременной памяти в данных акустической эмиссии / А.М. Гарматенко // Тринадцята міжнародна науково-технічна конференція [«Вимірювальна та обчислювальна техніка в технологічних процесах»]. – Одеса: Одеська національна академія зв’язку ім. О.С. Попова, 2014.
10. Autocorrelation [Електронний ресурс]. - 2013. - Режим доступу: http://en.wikipedia.org/wiki/Autocorrelation. - (дата звернення: 30.04.2014).
11. Крамер Г. Математические методы статистики / под ред. А.Н. Колмогорова; пер. с англ. - М.: Мир, 1975. - 648 с.
References 1. LB.ua (2013), “Ukrainskiye shakhtery vydali na-gora 85 mln tonn uglya”, available at: http://economics.lb.ua/state/2013/01/03/184542_ukrainskie_shahteri_vidali_nagora_85.html,
(Accessed 30 Apr 2014). 2. Malovichko, A.A. (2000), Gornyye udary [Prirodnyye opasnosti Rossii], Kruk, Moscow,
Russia. 3. MiningWiki (2014), “Spisok: Avarii na shakhtakh Ukrainy”, available at:
http://miningwiki.ru/wiki/%D0%A1%D0%BF%D0%B8%D1%81%D0%BE%D0%BA:%D0%90%D0%B2%D0%B0%D1%80%D0%B8%D0%B8_%D0%BD%D0%B0_%D1%88%D0%B0%D1%85%D1%82%D0%B0%D1%85_%D0%A3%D0%BA%D1%80%D0%B0%D0%B8%D0%BD%D1%8B, (Accessed 30 Apr 2014).
4. Degtyarenko, Í.V., Garmatenko O.M. (2012), “ Development and research the methods of automated analysis of acoustic emission data in coal beds”, Naukovo-praktichna konferentsíya Vseukraí̈ns'kogo konkursu students'kikh naukovikh robít za napryamom «Ínformatika, obchislyuval'na tekhníka ta avtomatizatsíya», pp. 46-50.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
67
5. Kulakov, G.I. (1993), Akusticheskaya emissiya i stadii protsessa treshchinoobrazovaniya gornykh porod [Fiziko-tekhnicheskiye problemy razrabotki poleznykh iskopayemykh], no. 2, pp. 11-15.
6. Deglin, B.M. (1999), “Ispytaniya eksperimental'nogo obraztsa zvukoulavlivayushchey apparatury «ZUA-98»”, Zhurnal «Ugol' Ukrainy», no. 1, pp. 26-34.
7. Vinogradov, S.D. (1964), Akusticheskiye nablyudeniya protsessov razrusheniya gornykh porod, Nauka, Moscow, 84 p.
8. Degtyarenko, Í.V., Garmatenko A.M. (2012), “Hurst parameter estimation of acoustic emission data in coal beds”, Mezhdunarodnaya konferentsiya «Radioelektronnoye priborostroyeniye kak osnova vysokotekhnologicheskogo obnovleniya vsekh otrasley proizvodstva», pp. 216-217.
9. Garmatenko A.M. (2014), “Search algorithm of short-term memory in the acoustic emission data”, Trynadtsyata mizhnarodna naukovo-tekhnichna konferentsiya «Vymiryuvalʹna ta obchyslyuvalʹna tekhnika v tekhnolohichnykh protsesakh».
10. MiningWiki (2014), “Autocorrelation”, available at: http://en.wikipedia.org/wiki/ Autocorrelation, (Accessed 30 Apr 2014).
11. Cramer, H. (1975), Matematicheskiye metody statistiki [Mathematical methods of statistics], Mir, Moscow, Russia.
Надійшла до редакції: Рецензент: 20.05.2014 . д-р техн. наук, проф. Воронцов О.Г.
О.М. Гарматенко ДВНЗ «Донецький національний технічний університет» Алгоритм пошуку короткочасної пам’яті в даних акустичної емісії вугільних пластів. Досліджується питання забезпечення безпеки ведення заходів з видобутку вугілля. Обґрунтована причина модернізації існуючих або розробка нових технічних засобів прогнозу безпеки ведення гірничих робіт. Обґрунтована причина пошуку короткочасної пам'яті в даних про активність імпульсів АЕ вугільних пластів. Запропоновано алгоритм пошуку короткочасної пам'яті в імпульсах АЕ. Поставлено критерій оптимальності роботи алгоритму для розв'язуваної задачі. Отримано і проаналізовано результати роботи алгоритму. Ключові слова: АЕ, безпека, шахта, короткочасна пам'ять.
A.M. Garmatenko Donetsk National Technical University Search algorithm of short-term memory in the acoustic emission data of coal beds. Article is devoted to the search of short-term memory in the acoustic emission data of coal beds. The aim of the article is to increase the effectiveness of acoustic emission data analysis by developing search algorithm of short-term memory. To formation the aim of article influenced existence the main problem of coal mining companies in Ukraine - the question of ensuring a high level of safety in coal mining. Thus, according to the State Service of Mining Supervision and Industrial Safety of Ukraine for the last five years (from 2009 to 2014) in the Ukrainian mining companies, as a result of gas-dynamic phenomena manifestations, 105 people have suffered (90 of whom died). Low level of safety in coal mines directly determines the imperfection of the currently used tools for the forecasting dangerous situations. It should be noted that coal beds’ cracks are occurred in coal mining. Formation of cracks directly determines the strength characteristics of coal beds. One of the methods to trace the formation of cracks is the AE method. From the viewpoint of physics and dynamics of coal mining, valuable information is short-term memory as the main feature of the formation of cracks. This is due to large values of the instantaneous velocity, complexity and

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
68
unsteady of gasdynamic processes occurring in the mines. And the searching long-term correlations are not correct. To search short-term memory in AE impulses the algorithm for finding short-term memory is proposed. For the most correct and informative results the optimality criterion of the algorithm was set. The results of the algorithm were obtained and analyzed. According to the results of the algorithm the AE impulses have short-term memory. However, finding the short-term memory in real time data must be performed with permanent refinement of the results (when adding new activities of AE impulses to the original series), i.e. continuously. According to the activity of AE impulses the results of algorithm in different data sections are different and required careful analysis. Keywords: AE, safety, mine, short-term memory.
Гарматенко Александр Михайлович, Украина, окончил Донецкий национальный технический университет, аспирант кафедры автоматики и телекоммуникаций, ГВУЗ «Донецкий национальный технический университет» (ул. Артема, 58, г. Донецк, 83001, Украина). Основное направление научной деятельности - разработка и модернизация современных методов и алгоритмов прогнозирования данных акустической эмиссии угольных пластов.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
69
Розділ 2 Інформаційні технології та телекомунікації

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
© Воропаєва А.О., 2014 70
УДК 621.391
А.О. Воропаєва (аспірант) ДВНЗ «Донецький національний технічний університет», м. Донецьк
кафедра автоматики та телекомунікацій e-mail: [email protected]
РОЗРОБКА МЕТОДУ КЕРУВАННЯ БЕЗПРОВОДОВИМИ ТЕЛЕКОМУНІКАЦІЙНИМИ МЕРЕЖАМИ НОВОГО ПОКОЛІННЯ НА ОСНОВІ
ЗАСТОСУВАННЯ ПІДХОДУ МАКСИМІЗАЦІЇ ЗАВАНТАЖЕНОСТІ МЕРЕЖІ
В статті розглянуто варіант вирішення задачі максимізації завантаженості мережі при використанні абонентами сервісів, зі змінними вимогами щодо швидкості передачі. Пропонується застосовувати функції корисності для оптимізації роботи мережі, на основі яких розроблено алгоритм, який сходиться до оптимального розподілу швидкості передачі. Ключові слова: функція корисності, функція Лагранжа, оптимальний розподіл.
Загальна постановка питання В умовах стрімкого розвитку інфокомунікаційних технологій для операторов зв’язку
важливим стає питання економії та ефективного перерозподілу існуючих ресурсів, особливо обмежених в мережах безпроводового зв’язку в умовах переходу до стандартів нового покоління [1]. При цьому важливо враховувати рівень задоволеності абонента сервісом, яким він користується. В загальному випадку, при підвищенні якості ресурсів, що виділяються користувачу, його задоволеність теж підвищується. Однак, загальна кількість ресурсів мережі обмежена, та має бути розподілена між всіма абонентами мережі [2].
Зрозуміло, що неможливо забезпечити задоволеність всіх користувачів мережі одночасно. Відповідно, мережа потребує вірної стратегії розподілу ресурсів, яка буде базуватися на задоволеності кожного абонента та враховувати умови роботи мережі. Одним з підходів до рішення такої задачі є підхід максимізації завантаженості мережі (МЗМ) [3, 4].
Постановка задачі максимізації завантаженості мережі Розглядається наступна задача оптимізації для управління потоком в мережі:
max)( i
ii xU ,
при обмеженнях на пропускну здатність та QoS
,,
,,
min
)(
ixx
lcx
ii
lTili
(1)
де )( ii xU - функція корисності (ФК) абонента і, від аргументу швидкості ix , )(lT - набір абонентів, які використовують канал l, lc - пропускна спроможність каналу, min
ix - мінімальна необхідна абонентові швидкість передачі.
Дану задачу автори [5, 6] розглядали як статистичну, тобто умови мережі (кількість абонентів, маршрути передачі, вимоги до швидкості обміну даними) вважались незмінними.
На практиці, такі умови можуть динамічно змінюватись, та цю динаміку потрібно враховувати для адекватного моделювання мережі. Таким чином, доцільно розглядати стохастичні задачі МЗМ. Вони можуть бути поділені на 3 класи в залежності від динаміки мережі:
1) стохастичний МЗМ з динамікою на сеансовому рівні (потоки повідомлень вважаються стохастичними). Для цього випадку питання розподілу ресурсів та стійкості
ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
71
були досліджені в [7], де було розглянуто задачу обчислення максимуму очікуваної завантаженості для ТКМ зі змінною кількістю стохастичних потоків на сеансовому рівні;
2) стохастичний МЗМ з динамічними змінами довжини пакетів та змінними вимогами до швидкості сервісу. Для таких задач використовують імітаційне моделювання випадкової довжини пакетів;
3) стохастичний МЗМ з динамічними змінами обмежень. Набір обмежень для МЗМ задач також може мати динамічні характеристики. Наприклад, змінний набір обмежень може бути використаний для моделювання зміни станів каналу для бездротових мереж.
Окрім розглянутих типів задач можна розглядати змішані МЗМ, які включають в себе більш ніж одну стохастичність [8].
На практиці існує ще один тип задач, де динаміка довжини пакетів обумовлена ефектом пачечності прикладного рівня, тобто змінюються вимоги користувача щодо швидкості передачі. На протязі такого з’єднання кожний абонент чергує час передачі та час очікування. Тобто, його потреби щодо швидкості змінюються випадковим образом. Така поведінка може бути змодельована за допомогою переривчастих TCP з’єднань, в котрих користувач передає данні через TCP-з’єднання.
Розглянемо задачу керування потоком для сервісів зі змінними вимогами до швидкості передачі, аналогічними до HTTP сервісу. Фактично більшість мультимедійних сервісів (потокове відео, відео-виклик) мають змінні вимоги до швидкості передачі. В таких сервісах задоволеність користувача рівнем QoS залежить не тільки від виділеної йому швидкості. Вона може змінюватися при зміні вимог до швидкості передачі інформації. Тобто при одній й тій самій швидкості передачі, рівень задоволеності може бути високим в період, коли користувачеві потрібна нижча швидкість, та низьким ,коли вимоги до швидкості зростають.
Задоволеність користувачем QoS повинна моделюватися з урахуванням зміни вимог до швидкості передачі. Це не може здійснюватися за допомогою статичної ФК, тому доцільно застосовувати динамічну ФК.
Розглянемо HTTP-подібний сервіс зі змінними вимогами до швидкостей передачі. Динамічна ФК для такого сервісу може бути записана як:
.очікуваннястанудля0,
t,моментвпередчістанудля),(),(U
xUsx
Більш того, оскільки стани передачі та очікування передуються випадковим чином, ),( txU слід формулювати як стохастичну функцію. Таким чином, сервіс з вимогами до
швидкості, які змінюються стохастично буде змодельовано за допомогою стохастичної ФК. Постановка задачі МЗМ для сервісів, що динамічно змінюються Розглянемо мережу з N користувачами та L каналами. Кожний канал l має пропускну
здатність lc . Припускається, що наскрізний момент кожного користувача фіксований.
Позначимо )(iL
- набір каналів, котрий користувач і проходить при своєму наскрізному
з’єднанні, )(iN
- набір шляхів, котрі використовує канал l. Набір станів обмежений, він назначає різні ФК для різних станів користувача. ФК конкретного стану відображає міру задоволеності користувачем назначеною йому швидкістю в цьому стані. Стани користувача змінюються із часом ,тому в усі моменти часу йому має бути призначено ФК, яка відповідає рівню швидкості передачі в даному стані.
Припустимо, що зміна станів всіх користувачів, а відповідно і рівень їх вимог до швидкостей передачі, описано стаціонарним стохастичним процесом, при чому стан системи визначається комбінацією станів всіх користувачів в даний момент часу. Відповідно, не тільки кожен користувач, але і система в цілому може бути описана стаціонарним стохастичним процесом.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
72
Позначимо чисто станів системи К, та імовірність, що система знаходиться в k-му стані - kP . За відомим станом системи можна знайти стани та ФК всіх користувачів та навпаки. Тому далі буде використовуватися стан системи для моделювання вимог до швидкості, які змінюються стохастично, для всіх користувачів замість того, щоб розглядати поведінку кожного користувача окремо. Позначимо )(, ,,, kikiki SS відповідно швидкість передачі та ФК для і-го користувача в k-му стані. ФК вважається строго вогнутою та зростаючою.
Розглянемо 3 обмеження на управління потоком: за пропускною здатністю каналів, та два за вимогами QoS. Перше обмеження потребує ,щоб сумарна швидкість по каналу не перевищувала його пропускну спроможність:
lcSPk
k lNi
lkik
,1 )(
, . (2)
Якщо середня сума швидкостей по комунікаційній ланці наближується до його пропускної здатності, то середня затримка по каналу наближується до нескінченності. Тому, середня сума швидкостей для каналу повинна бути меншою, ніж його пропускна здатність на величину ll c* . Де l - бажаний трафік каналу 10 l .
Друге обмеження враховує необхідність гарантованого мінімального рівня задоволеності всіх користувачів сеансом:
iqSP i
k
kikikk
,)(1
, (3)
де iq - нижня границя значення СФК для і-го користувача. Третє обмеження враховує те, що користувач вимагає швидкість передачі не нижче
деякого мінімального рівня: kiSS ikik ,,min . (4)
Таким чином, задача оптимізації формулюється:
max)(1 )(
k
k
S
lNi
ikikkkSPF ,
при обмеженнях:
lcSPk
k lNi
lkik
,1 )(
, ,
iqSP i
k
kikikk
,)(1
,
kiSS ikik ,,min . Рішення даної задачі дає розподіл швидкості всіх користувачів для всіх станів, яке буде
максимізувати завантаженість мережі при урахуванні обмежень на пропускну спроможність та вимоги QoS.
При відомій кількості станів k та імовірностей kP задача зводиться до детерміністичної задачі випуклої оптимальності. Однак, таку інформацію доволі тяжко отримати апріорі.
Тому пропонується розробити розподілений алгоритм, котрий буде вирішувати дану задачу без апріорної інформації про імовірності станів мережі.
Функція Лагранжа для цільової функції має вигляд:
k
k
N
i
L
l
k
kiikikk
N
ii
k
k lNi
kikllikikk qSPSPcSPSL1 1 1 111 )(
, ))(()()(),,( ,
де

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
73
],[ ,21 L
, ],[ ,21 N
, ].,[ ,21 kSSSS
Тоді двоїста задача визначається:
),(min0,0
G , (6)
де ),,(max),(
SLG .
Для рішення задачі (6) визначається вектор, який максимізує L для даних
, .
)],(),,(),,([),( 21
LSSSS . А кожній kS відповідає
)],(),,(),,([),( ,2,1,
Lkkkk SSSS . Отже ,функція Лагранжу приймає вигляд:
,),,(),,(111
N
iii
L
lllk
k
kkk qcSLPSL
де
kSSSLlLi
iikikik
N
iikk
),)()1((),,()(1 . (7)
Задача оптимізації може бути вирішена без апріорної інформації про kP шляхом
максимізації ),,( kk SL
по k. Оптимальне рішення (7):
N
i iLllikikiki
SS
k lSSSkk
1 )(
*
],)(*)1[(maxarg),,(min
. (8)
Задача (/) має рішення:
)(iLl
li .
Оскільки )( ikik S - вогнута та диференційована функція, то ),,(
iiikS можна обчислити із (8).
Тепер розглянемо двоїсту задачу, в котрій необхідно мінімізувати двоїсту цільову
функцію ),(
G . Внаслідок випуклості функції двоїста задача є задачею випуклої стохастичної оптимальності. Однак, внаслідок відсутності інформації про стани системи, вона не може бути вирішена напряму. Тому повинен бути використаний стохастичний градієнтний алгоритм [9], який дозволяє вирішити цю проблему.
Даний алгоритм задається ітераційною процедурою: lx n
lnn
lnl ],[1 , .],[1 iy n
inn
ini
де n - розмір кроку на n-й ітерації; ni
nl yx , - випадкові величини, котрі є елементами послідовності стохастичного градієнту
),(
G в точках n
та n
. Значення змінних n
inl yx , отримують із
lScx ni
n
ilNi
iklnl n
),,(
)( , .,)),(( iqSy i
ni
n
iikikni nn

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
74
де nk - стан системи на n-й ітерації. Тоді nn , сходяться з імовірністю 1 до оптимальних
рішень ** , , якщо розмір кроку задовольняє умовам:
00)(,,0
n
ln
n
nn . (9)
Крім того, оскільки задача є задачею випуклої оптимальності, при суворо вогнутій цільовій функції, вектор рішення (8) є оптимальним.
Розробка методу керування потоком безпроводової телекомунікаційної мережі нового покоління
Пропонуються наступний метод керування потоком:
1. Задати початкові значення векторів
, . 2. Для кожної n-ї ітерації виконувати наступні дії:
- для кожного і-го користувача: - розраховується його швидкість передачі даних, базуючись на його множину Лагранжа n
j та множину каналів, яку він використовує: n
iikikikin
SS
ni
n
iik SSSikik
n
)()1(maxarg),(min
,
- розраховується значення його множини Лагранжа для наступної ітерації, ґрунтуючись на поточному значенні ФК ,та з урахуванням обмеження на QoS (4):
ini
n
iikikni qSy nn
)),(( , ][1 ni
nni
ni y ,
- для кожного каналу розраховується значення його множини Лагранжу для наступної ітерації, базуючись на сумарній швидкості користувачів, що використовують цей канал.
lScx ni
n
ilNi
iklnl n
),,(
)( , ][1 n
lnn
lnl x .
Запропонований алгоритм може бути реалізований окремо для кожного користувача та кожного каналу, ґрунтуючись тільки на локальній інформації. Кожному абонентові не потрібно мати інформацію про поточний стан усієї системи ,а лише знати суму множин Лагранжа усіх каналів ,які він використовує та поточне значення своєї ФК. Також кожний користувач має змінювати власний стан та ФК відповідно до змін своїх швидкісних вимог.
Сума множників Лагранжу може передаватися через канали його маршруту у службових пакетах. Також кожний канал має знати миттєву сумарну вхідну швидкість на поточній ітерації, яка може надходити до вузлів-джерел, що використовують цей канал у службових пакетах, або спеціальних полях пакетів даних, або шляхом вимірювань.
Висновки В статті розглянуто задачу управління потоком в беспроводових телекомунікаційних
мережах нового покоління на основі ФК. Зазначено, що раніше ФК розглядалися як детермінована функція, тобто справедливо, якщо потреби користувача до швидкості обміну даними є фіксованими на протязі всього сеансу зв’язку.
Задача управління потоком формулюється як стохастична задача оптимізації за критерієм максимізації середньої ФК мережі при обмеженнях на пропускну здатність комунікаційних ланок та вимог QoS. Для рішення даної задачі оптимізації пропонується розподілений метод керування безпроводовими телекомунікаційнии мережами нового покоління, котрий сходиться до оптимального розподілу швидкості передачі.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
75
Список використаної літератури 1. Модель розвитку мережі мобільного оператора при використанні технології LTE/SON /
[І.В. Дегтяренко, Д.С. Шахов, Д.О. Кнерцер, О.О. Орехов] // Наукові праці Донецького національного технічного університету. Серія: “Обчислювальна техніка та автоматизація”. - 2011. - Випуск 20 (182). - С. 130 – 136.
2. Зорі А.А. Оптимізація розподілу ресурсів телекомунікаційної системи з урахуванням функції корисності / А.А. Зорі, А.О. Воропаєва // Збірник наукових праць Донецького інституту залізничного транспорту Української державної академії залізничного транспорту. – 2012. – Випуск 32. – С. 106-108.
3. F. Kelly. Charging and rate control for elastic traffic, EuropeanTransactions on Telecommunications, 8 (1) (1997), РР. 33–37.
4. F. Kelly, A. Maulloo, D. Tan, Rate control in communication networks: shadow prices, proportional fairness and stability, Journal of the Operational Research Society, 49 (3) (1998), РР. 237–252.
5. Воропаєва А.О. Оптимальне управління режимами прийому та передачі телекомунікаційних мереж / А.О. Воропаєва // Наукові праці Донецького національного технічного університету. Серія: Обчислювальна техніка та автоматизація. - 2013. - Випуск 1 (24). - С 89-95.
6. J. Cho, S. Chong, Utility max-min flow control using slope-resricted utility functions, IEEE Transactions on Communications, 55 (5) (2007), РР. 963–972.
7. K. Ma, R. Mazumdar, J. Luo, On the performance of primal/dual schemes for congestion control in networks with dynamic flows, in: Proceedings of IEEE INFOCOM, 2008.
8. Y. Yi, M. Chiang, Stochastic network utility maximization, European Transactions on Telecommunications, 19 (4) (2008), РР. 421–442.
9. P. Kall, S.W. Wallace, Stochastic Programming, Wiley, 1994. References
1. Degtyarenko, I., Shahov D., Knertser D., Orehov O. (2011) “Model of development of the mobile operator’s network based on LTE/SON technology”, Proceedings of Donetsk National Technical University. Series: "Computers and Automation" vol. 20 no 182, 2011 pp/130-136.
2. Zori A., Voropaeva A., (2012) “Optimization of resource allocation telecommunication system based on the utility function”, Scientific Papers of Donetsk Institute of Railway Transport Ukrainian State Academy of Railway Transport vol 32 pp/ 106-108.
3. F. Kelly, Charging and rate control for elastic traffic, EuropeanTransactions on Telecommunications 8 (1) (1997) 33–37.
4. F. Kelly, A. Maulloo, D. Tan, Rate control in communication networks: shadow prices, proportional fairness and stability, Journal of the Operational Research Society 49 (3) (1998) 237–252.
5. Voropaeva A., (2013) “Optimal control modes of reception and transmission of telecommunications networks”, Proceedings of Donetsk National Technical University. Series: "Computers and Automation" vol. 1 no 24, 2013 pp 89-95.
6. Cho, S. Chong, Utility max-min flow control using slope-resricted utility functions, IEEE Transactions on Communications 55 (5) (2007) 963–972.
7. K. Ma, R. Mazumdar, J. Luo, On the performance of primal/dual schemes for congestion control in networks with dynamic flows, in: Proceedings of IEEE INFOCOM, 2008.
8. Y. Yi, M. Chiang, Stochastic network utility maximization, European Transactions on Telecommunications 19 (4) (2008) 421–442.
9. P. Kall, S.W. Wallace, Stochastic Programming, Wiley, 1994.
Надійшла до редакції: Рецензент: 20.03.2014 д-р техн. наук, проф. Зорі А.А.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
76
А.А. Воропаева ГВУЗ «Донецкий национальный технический университет» Разработка метода управления беспроводными телекоммуникационными сетями нового поколения на основе применения подхода максимизации загруженности сети. В статье рассмотрен вариант решения задачи максимизации загруженности сети при использовании абонентами сервисов с изменяющимися требованиями скорости передачи. Предлагается применение функций полезности для оптимизации работы сети, на основе которых разработан алгоритм, который сходится к оптимальному распределению скорости передачи. Ключевые слова: функция полезности, функция Лагранжа, оптимальное распределение.
A. Voropaeva Donetsk National Technical University A method of next-generation wireless telecommunication network control based on the approach of network congestion maximization. The framework of network utility maximization (NUM) has become an important part of resource allocation in communication networks due to its broad adaptability to various problems and network protocols. In this framework, each user is assigned a utility function that represents its satisfaction to the quality of service (QoS) of its communication service according to the amount of resource allocation. Then, resource allocation is performed such that network utility, which is defined as the sum of utilities of all users in the network, is maximized while satisfying some constraints on resource allocation, such as the total amount of the available resource. In this paper a utility based flow control problem for a wireless communication network is developed. The article presents an option for solving the problem of maximizing network utilization using subscriber services with the changing requirements of the transmission rate. In wireless communication networks, many services are variable rate services, i.e., the degree of their rate requirement varies over time, which cannot be modeled with traditional static utility functions. The author proposes to solve this problem via stochastic utility function that varies stochastically according to the variation of the degree of the rate requirement of a service. A flow control problem as a stochastic optimization problem with stochastic utility functions that aims at maximizing the average network utility while satisfying the constraint on link capacity and QoS requirement is solved. A distributed flow control algorithm tha tconverges to the optimal rate allocation is developed in the article. Keywords: utility function, Lagrange function, optimal allocation.
Воропаева Анна Александровна, Украина, закончила Донецкий национальный технический университет, аспирант третьего года обучения, ассистент ГВУЗ «Донецкий национальный технический университет» (ул. Артема, 58, г. Донецк, 83001, Украина). Основное направление научной деятельности – методы исследования и оптимизации беспроводных телекоммуникационных сетей.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
© Гостев В.И., Кунах Н.И., Артющик А.С., 2014 77
УДК 004.715
В.И. Гостев (д-р техн. наук, проф.), Н.И. Кунах (д-р техн. наук, проф.), А.С. Артющик (аспирант)
Государственный университет телекоммуникаций, г. Киев кафедра коммутационных систем
e-mail:[email protected]
АППРОКСИМАЦИЯ ЗВЕНА ЧИСТОГО ЗАПАЗДЫВАНИЯ ДЛЯ AQM-СИСТЕМ КОМПЛЕКСНОЙ ПЕРЕДАТОЧНОЙ ФУНКЦИЕЙ ЗВЕНА ПАДЕ
В работе исследованы комплексные передаточные функции звена Паде 1,2, 3 и 4-го порядка, которые аппроксимирует звено чистого запаздывания в системах активного управления очередью пакетов сетей TCP/IP. Функции, аппроксимирующие звено чистого запаздывания, достаточно простые и позволяют исследовать систему с высокой точностью. Ключевые слова: система активного управления очередью, передаточная функция, маршрутизатор, звено Паде.
Общая постановка проблемы В последние годы непредсказуемый рост Интернета все более и более указывает на
проблему борьбы с перегрузками. Явление перегрузок сети происходит, когда количество данных, введенных в сеть, больше чем количество данных, которые доставляются по назначению. При пакетной передаче источники данных должны уменьшать скорость передачи при наличии потери пакетов. Такой подход борьбы с перегрузками принят протоколом ТСР (Transmission Control Protocol).
Для решения проблем уменьшения высокой задержки из-за полных очередей служит стратегия Активное Управление Очередью – Active Queue Management (AQM). При AQM уведомления о перегрузке производятся отбрасыванием (или маркировкой) поступающих пакетов прежде, чем очереди маршрутизаторов станут полными. Другими словами, AQM-системы используют принцип обратной связи: оконечные хосты реагируют на отбрасывание/маркировку пакетов в очередях маршрутизатора, уменьшая их скорость передачи. Длина очереди в маршрутизаторах уменьшается и непрерывная задержка, испытываемая пакетами, также уменьшается. В AQM-системе всегда имеется запаздывание, которое отображается на структурной схеме звеном чистого запаздывания. Для анализа AQM-системы весьма удобно это звено аппроксимировать звеном Паде. Во многих работах (см. например [1-4]) системы активного управления очередью пакетов (AQM-системы) в сетях TCP/IP исследуются как системы автоматического управления с обратной связью.
Решение задачи Динамическая модель поведения (режима работы) ТСР получена путем использования
протекающих потоков информации и анализа стохастических дифференциальных уравнений в работах [1-3]. Результаты моделирования показывают, что эта модель точно охватывает динамику ТСР. Используя упрощенную модель ТСР, динамику AQM-системы можно описать следующими алгебраическими уравнениями:
)(2
)()2( 2
2
2 speNCRsW
CRNs osRo
o , )()()1( sW
RNsq
Rs
oo , (1)
где δW - переменная составляющая предполагаемого размера окна ТСР (пак.), R0=q/C+Tp - время следования туда и обратно – round trip time RTT (с), C - емкость связи (пак/с), Tp - задержка распространения (с), q - переменная составляющая предполагаемой длины

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
78
очереди (пак), N - коэффициент нагрузки (число ТСР сессий), p - переменная составляющая вероятности маркировки/отбрасывания пакетов. Блок схема линеаризованной AQM-системы управления показана на рис.1.
Рисунок 1 – Блок схема линеаризованной AQM-системы управления
Передаточную функцию объекта управления AQM-системы, используя выражение (1),
записывают в виде
ooo sRsR
oo
o
sR
oo
esPsGesRs
NCR
NCR
e
Rs
CRNs
NC
sG
)()()1)(1
2(
)2()(
)1)(2(
2)( 2
2
3
2
2
. (2)
Как показывает практика эксплуатации линий связи, R0 находится в пределах от 0,25 до 1секунды, а существенные частоты для AQM-систем находятся в диапазоне от 0 до 10 Гц. Таблица 1 в диапазоне частот от 0.01 до 10 радиан/с и значениях R0, равных 0,25, 0,5, 0,75 и 1 с дает значения сдвига фазы звеном e-sR0. Значение R0=0,246 с использовано в работах [1-3].
Таблица 1
Значение сдвига фаз звеном osRe φ (ω)= -(R0xω)×57.3, град., -1800φ00
ω, рад/с. R0=0.246 R0=0.25 R0=0.5 R0=0.75 R0=1 0.01 0.02 0.03 0.04 0.06 0.08 0.1
- 0.14 - 0.28
- 0.423 - 0.56 - 0.85
- 1.135 - 1.41
-0.14 - 0.287 -0.429 -0.573 -0.859 -1.146 -1.432
-0.287 -0.573 -0.860 -1.146 -1.719 -2.292 -2.865
-0.430 -0.8595 -1.289 -1.719 -2.579 -3.438 -4.29
-0,573 -1,146 -1,719 -2,292 -3,438 -4,584 -5,73
0.2 0.3 0.4 0.6 0.8 1
- 2.82 - 4.23 - 5.64 - 8.46
- 11.28 - 14.1
-2.87 -4.29 -5.73 -8.59 -11.46 -14.32
-5.73 -8.60 -11.46 -17.19 -22.92 -28.65
-8.59 -12.89 -17.19 -25.79 -34.38 -42.9
-11,46 -17,19 -22,92 -34,38 -45,84 -57,3
2 3 4 6 8
10
- 28.2 - 42.3 - 56.4 - 84.6
- 112.8 - 141
-28.7 -42.9 -57.3 -85.9 -114.6 -143.2
-57.3 -86.0 -114.6 -171.9
-85.9 -128.9 -171.9
-114,6 -171,9

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
79
Аппроксимируем звено чистого запаздывания с передаточной функцией osRe звеном Паде к-го порядка. Обозначим передаточную функцию звена Паде любого порядка как
).(sKкpade Тогда можно записать для звена чистого запаздывания: - приближение Паде первого порядка
)2
1/()2
1()(1 sRsRsKe oopade
sRo , (3)
- приближение Паде второго порядка
)122
1/()122
1()( 22
22
2 sR
sR
sR
sR
sKe oooopade
sRo , (4)
- приближение Паде третьего порядка
33
22
33
22
3
1201021
1201021
)(sRsRsR
sRsRsR
sKeooo
ooo
padesRo
, (5)
- приближение Паде четвертого порядка
44
33
22
44
33
22
4
168084283
21
168084283
21
)(sRsRsRsR
sRsRsRsR
sKeoooo
oooo
padesRo
. (6)
Чтобы определить передаточную функцию звена Паде порядка N, т.е. )(sKnpade ,можно
использовать программу MATLAB: Rdelay=1; N=;
[humpade,denpade]=pade(Rdelay,N); tfpade=tf(humpade,denpade).
Например, для N=2 эта программа MATLAB дает следующий результат: Transfer function:
s^2 - 6 s + 12 --------------
s^2 + 6 s + 12. Теперь числитель и знаменатель полученной передаточной функции надо разделить на
свободный член 12 и произвести замену переменной s на sRo . В результате получим
1212
1212)(
22
22
2
sRsR
sRsR
sKoo
oo
pade .
Для N=3 эта программа MATLAB дает следующий результат: Transfer function:
-s^3 + 12 s^2 - 60 s + 120 -------------------------- . s^3 + 12 s^2 + 60 s + 120
Числитель и знаменатель полученной передаточной функции делим на свободный член 120 и производим замену переменной s на sRo . В результате получим

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
80
1210120
1210120)(
22
33
22
33
3
sRsRsR
sR
sR
sR
sKooo
ooo
pade .
Для N=4 эта программа MATLAB дает следующий результат: Transfer function:
-s^4-20s^3 + 180s^2 -840 s + 1680 --------------------------------------------. s^4-20s^3 + 180s^2 +840 s + 1680
Числитель и знаменатель полученной передаточной функции делим на свободный член 1680 и производим замену переменной s на sRo . В результате получим
1228
3841680
1228
3841680)(
22
33
42
22
33
42
4
sRsRsRsR
sR
sR
sR
sR
sKoooo
oooo
pade .
На основании полученных формул запишем комплексные передаточные функции звена Паде 1,2,3 и 4 порядков с учетом того, что j2 = -1; j3 = -j; j4 =1 для приближения Паде первого порядка
)2
1/()2
1()(1 jR
jR
jK oopade , (7)
для приближение Паде второго порядка
)22
1/()22
1()( 22
22
2 jRRjRRjK oooopade , (8)
для приближение Паде третьего порядка
)1202
(10
1
)1202
(10
1)(
33
22
33
22
3
ooo
ooo
padeRR
jR
RRj
R
jK
, (9)
для приближение Паде четвертого порядка
)842
(168028
31
)842
(168028
31
)(3
34
42
2
33
44
22
4
oooo
oooo
padeRR
jRR
RRjs
RR
jK
. (10)
Аргумент комплексной передаточной функции звена Паде 1,2,3 и 4 порядков, т.е. частотная характеристика звена Паде 1,2,3 и 4 порядка определяется для приближения Паде первого порядка
))2
()2
((3,57)( oo Rarctg
Rarctg , градусов. (11)
Для звена Паде второго порядка частотная характеристика определяется как
))
121
2()
121
2((3,57)(2
22
2
o
o
o
o
R
R
arctgR
R
arctg
. (12)
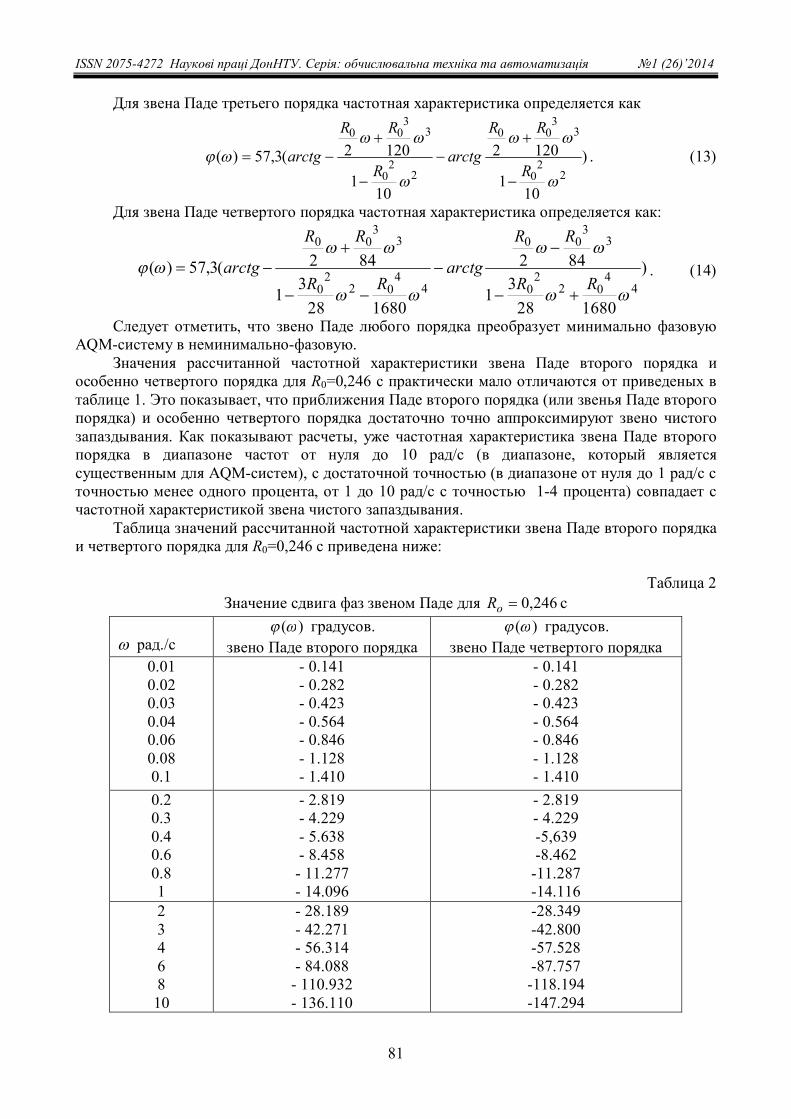
ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
81
Для звена Паде третьего порядка частотная характеристика определяется как
)
101
1202
101
1202(3,57)(2
20
33
00
22
0
33
00
R
RR
arctgR
RR
arctg
. (13)
Для звена Паде четвертого порядка частотная характеристика определяется как:
)
1680283
1
842
1680283
1
842(3,57)(4
402
20
33
00
44
022
0
33
00
RR
RR
arctgRR
RR
arctg
. (14)
Следует отметить, что звено Паде любого порядка преобразует минимально фазовую AQM-систему в неминимально-фазовую.
Значения рассчитанной частотной характеристики звена Паде второго порядка и особенно четвертого порядка для R0=0,246 с практически мало отличаются от приведеных в таблице 1. Это показывает, что приближения Паде второго порядка (или звенья Паде второго порядка) и особенно четвертого порядка достаточно точно аппроксимируют звено чистого запаздывания. Как показывают расчеты, уже частотная характеристика звена Паде второго порядка в диапазоне частот от нуля до 10 рад/с (в диапазоне, который является существенным для AQM-систем), с достаточной точностью (в диапазоне от нуля до 1 рад/с с точностью менее одного процента, от 1 до 10 рад/с с точностью 1-4 процента) совпадает с частотной характеристикой звена чистого запаздывания.
Таблица значений рассчитанной частотной характеристики звена Паде второго порядка и четвертого порядка для R0=0,246 c приведена ниже:
Таблица 2
Значение сдвига фаз звеном Паде для 246,0oR с рад./с
)( градусов. звено Паде второго порядка
)( градусов. звено Паде четвертого порядка
0.01 0.02 0.03 0.04 0.06 0.08 0.1
- 0.141 - 0.282 - 0.423 - 0.564 - 0.846 - 1.128 - 1.410
- 0.141 - 0.282 - 0.423 - 0.564 - 0.846 - 1.128 - 1.410
0.2 0.3 0.4 0.6 0.8 1
- 2.819 - 4.229 - 5.638 - 8.458 - 11.277 - 14.096
- 2.819 - 4.229 -5,639 -8.462
-11.287 -14.116
2 3 4 6 8 10
- 28.189 - 42.271 - 56.314 - 84.088
- 110.932 - 136.110
-28.349 -42.800 -57.528 -87.757 -118.194 -147.294

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
82
Использование передаточной функции звена Паде второго порядка вместо передаточной функции звена чистого запаздывания позволяет весьма просто определять логарифмические амплитудные и фазо-частотные характеристики AQM-систем, используя пакет Control System Toobox 5.0 интерактивной системы MATLAB, что значительно облегчает анализ AQM-систем
На рис.2 приведены фазо-частотные характеристики звена Паде: а) первого порядка, б) второго порядка и в) третьего порядка и г) четвертого порядка, полученные в системе MATLAB.
а)
б)
в)
г)
Рисунок 2 – Фазо-частотные характеристики звена Паде: а) первого порядка, б) второго порядка, в) третьего порядка и г) четвертого порядка

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
83
Выводы На основании данной работы можно заключить, что при исследовании AQM-систем
наиболее целесообразной заменой передаточной функции звена чистого запаздывания является передаточная функция звена Паде второго порядка с точки зрения получения достаточной точности результатов и упрощения анализа характеристик систем.
Список использованной литературы 1. Hollot C.V., Misra V., Towsley D., Gong W.B. “A Control Theoretic Analysis of RED,” in
Proceedings of IEEE/INFOCOM, April, 2001, pp. 1510-1519. 2. Hollot C.V., Misra V., Towsley D., Gong W.B. “Analysis and design of controllers for AQM
routers supporting TCP flows”. IEEE/ACM Transactions on Automatic Control, vol. 47, no.6, pp. 945-959, June 2002.
3. Hollot C.V., Misra V., Towsley D., Gong W.B., “On Designing Improved Controllers for Routers Supporting TCP Flows”, in Proceedings of IEEE INFOCOM’2001, April 2001, 1726-1734.
4. Гостев В.И. Фаззи–системы активного управления очередью в сетях TCP/IP: монография / В.И. Гостев, С.Н. Скуртов. – Нежин: ООО “Видавництво “Аспект-Поліграф”, 2011. – 464 с.
5. Дорф Р. Современные системы управления / Р. Дорф, Р. Бишоп; пер. с англ. - М.: Лаборатория Базовых Знаний, 2002. - 832 с.
References 1. Hollot, C.V., Misra, V., Towsley, D. and Gong, W.B. (2001), “A Control Theoretic Analysis of
RED,” in Proceedings of IEEE/INFOCOM, April, 2001, pp. 1510-1519. 2. Hollot, C.V., Misra, V., Towsley, D. and Gong, W.B. (2002) “Analysis and design of
controllers for AQM routers supporting TCP flows”. IEEE/ACM Transactions on Automatic Control, vol. 47, no.6, pp. 945-959, June 2002.
3. Hollot, C.V., Misra, V., Towsley, D. and Gong, W.B. (2001), “On Designing Improved Controllers for Routers Supporting TCP Flows”, in Proceedings of IEEE INFOCOM’2001, April 2001, 1726-1734.
4. Gostev, V.I. and Skurtov, S.N. (2011), Fuzzy–system active management a turn in the networks of TCP/IP, “Aspekt-Poligraf”, Nejin, Ukraine.
5. Dorf, R. and Bishop, R. (2002) Modern control system, Translate. with English, Laboratory of Base Knowledges, Moscow, Russia.
Надійшла до редакції: Рецензент: 24.04.2014 канд. техн. наук, проф. Турупалов В.В.
В.І. Гостєв, Н.І. Кунах, А.С. Артющик Державний університет телекомунікацій Апроксимація ланки чистого запізнювання для AQM-систем комплексною передавальною функцією ланки Паде. В роботі досліджені комплексні передавальні функції ланки Паде 1 ,2, 3 та 4-го порядку, які апроксимують ланку чистого запізнювання в системах активного управління чергою пакетів в мережах TCP/IP. Функції, які апроксимують ланку чистого запізнювання, достатньо прості та дозволяють досліджувати систему з високою точністю. Ключові слова: система активного управління чергою, передавальна функція, маршрутизатор, ланка Паде.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
84
V.I. Gostev, N.I. Kunakh, A.S. Artyuschik State University of Telecommunications Approximation of a pure delay link for AQM-systems by the complex transmission function of the link of Pade. In the work a complex transfer function of Pade link of 1 ,2, 3 and 4th order which approximates a link of pure delay in the systems of active queue management(AQM) of packages of networks TCP/IP is investigated. Functions which approximate the link of pure delay are simple enough and allow to probe the system with high exactness. Keywords: system of active management of a queue, transmission function, router, link of Pade.
Гостев Владимир Иванович, Украина, закончил Киевское высшее радиотехническое училище ПВО, докт. техн. наук, профессор, заведующий кафедрой коммутационных систем Государственного университета телекоммуникаций (ул. Соломенская,7, г. Киев, 03110, Украина). Основное направление научной деятельности -системы автоматического управления с нечеткими регуляторами, в том числе системы активного управления очередью в сетях TCP/IP.
Кунах Наталия Игоревна, Украина, закончила Одесский электротехнический институт связи им. А.С.Попова, докт. техн. наук, профессор, профессор кафедры коммутационных систем Государственного университета телекоммуникаций (ул. Соломенская,7, г. Киев, 03110, Украина). Основное направление научной деятельности – радиотехнические устройства и средства телекоммуникаций.
Артющик Александр Сергеевич, Украина, закончил Киевское высшее инженерное радиотехническое училище ПВО имени маршала авиации Покрышкина А.И., аспирант кафедры коммутационных систем Государственного университета телекоммуникаций (ул. Соломенская,7, г. Киев, 03110, Украина). Основное направление научной деятельности - системы активного управления очередью в сетях TCP/IP.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
© Дегтяренко И.В., Лозинская В.Н., 2014 85
УДК 621.39
И.В. Дегтяренко (канд. техн. наук, доц.), В.Н. Лозинская ГВУЗ «Донецкий национальный технический университет», г. Донецк
кафедра «Автоматика и телекоммуникации» e-mail: [email protected], [email protected]
ДИНАМИЧЕСКИЕ МОДЕЛИ СРЕДСТВ УПРАВЛЕНИЯ ТРАФИКОМ В СЕТЕВОМ УЗЛЕ
Разработаны динамические модели планировщика, как средства управления трафиком в сетевом узле. Представленные модели позволяют повысить эффективность использования сетевых ресурсов за счет управления размерами буферного пространства каждой из очередей планировщика. Предложенные математические модели отражают динамику работы планировщиков в пространстве состояний, а переход в базис Max-plus алгебры позволяет получить заданные оценки, с учетом необходимых параметров качества обслуживания. Ключевые слова: параметры качества обслуживания, средства управления трафиком, дисциплина обслуживания очереди, Max-plus алгебра, дискретно-событийная система, пространство состояний.
Общая постановка проблемы Обеспечение необходимого уровня качества предлагаемых услуг является основополагающей функцией общей системы управления в современных телекоммуникационных сетях (ТКС) [1]. Одним из средств обеспечения заданного качества обслуживания (QoS) [2] является концепция Traffic Engeneering, в рамках которой «заложены» средства управления трафиком, как на отдельном сетевом узле, так и в сети в целом. Иерархичность и мультисервисность современных ТКС стали причиной усложнения задач управления сетью в целом, переместив при этом часть функций управления в управляемый сетевой узел (коммутатор, маршрутизатор). На данный момент в рамках сетевого узла, в зависимости от модели качества обслуживания предоставляемых услуг (Integrated Service, Differentiated Service), реализованы такие средства управления как: функции «управления допустимостью соединения», классификация пакетов, планировщик, протокол резервирования ресурсов [3]. Особенностью многих видов сетевого оборудования является ограниченность всех вышеперечисленных функций. Это связанно с невозможностью перенастройки алгоритмов и введения новых, если это потребуется. Однако, с появлением концепции открытых программно-конфигурируемых сетей (SDN) [4], у поставщиков телекоммуникационных услуг появилась возможность перенастраивать политики планирования с целью повышения эффективности использования сетевых ресурсов. Так как задачи управления трафиком с учетом эффективности использования сетевых ресурсов, при заданном качестве обслуживания, стали основополагающими в русле управления ресурсами ТКС, то разработка математических моделей алгоритма эффективного управления трафиком, является актуальной проблемой для исследований. Целью данной работы является разработка динамических моделей работы планировщиков в современных ТКС для нахождения оптимальной величины буферного пространства очередей планировщика, при обеспечении заданных параметров качества обслуживания.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
86
Анализ существующих алгоритмов планировщиков Алгоритмы планирования обслуживания очередей, как было упомянуто выше, относятся к классу средств, реализованных непосредственно в сетевых узлах. За счет основной функции планировщика, сглаживания профиля трафика, можно достичь таких целей как уменьшение пачечности трафика, повышение эффективности использования канальных ресурсов, осуществление защиты от перегрузки, при обеспечении заданных параметров QoS. Наибольшее распространение в телекоммуникационных сетях получили следующие алгоритмы как DRR, PQ, CQ, LLQ, WFQ, CWFQ и др. Все эти алгоритмы можно разделить на несколько классов [5-8]: - без приоритетного обслуживания (DRR); - приоритетного обслуживания (CQ, PQ); - взвешенного обслуживания (WFQ, PGPS, W2FQ); - гибридные (LLQ, CWFQ). На данный момент планировщики без приоритетного обслуживания «трансформировались» в средства циклического обслуживания очередей в сетевом устройстве. Именно поэтому данный класс не будет подробно рассматриваться. Алгоритмы приоритетного обслуживания - обслуживают очереди, согласно их приоритетам. Существует 4 класса очередей при приоритетном обслуживании: High, Medium, Normal, Low. Пакеты попадают в очереди соответственно значению класса обслуживания в поле ToS. Логика работы такого класса планировщиков в следующем: если активна более приоритетная очередь, то из нее обслуживаются все пакеты, затем обслуживание получает очередь, приоритет у которой ниже и т.д. Из логики работы данного алгоритма, очевидно, что постоянное наличие высокоприоритетного трафика в очереди приведет к значительным потерям низкоприоритетного трафика. Исключение данного недостатки возможно путем применения алгоритмов взвешенного обслуживания очередей. Алгоритмы взвешенного обслуживания очередей на данный момент является самым распространенным классом планировщиков, реализованных в сетевых устройствах. Логика работы данных планировщиков сводится к определению так называемых весов для обслуживания пакетов. Фактически вес определяет долю пропускной способности выходного интерфейса, которую необходимо предоставить для обслуживания каждой из очередей, формируемых согласно договору о предоставления обслуживания (SLA). В итоге, каждый из пакетов, находящихся в любой из очередей, получает обслуживание. К недостаткам данного класса планировщика можно отнести низкую скорость обработки, что является достаточно критичным для приложений, чувствительных к временным задержкам. Для устранения этого недостатка разработчики предложили ряд гибридных алгоритмов. Наиболее известным гибридным алгоритмом, который реализован в сетевом оборудовании большинства производителей, остается алгоритм очередей с малыми задержками (Low Latency Queue - LLQ). В данном алгоритме для трафика, чувствительного к задержкам, выделяется одна очередь, для обслуживания которой резервируется определенная пропускная способность исходящего интерфейса, а все остальные очереди обслуживаются в соответствии с алгоритмом взвешенного обслуживания. В этом случае также настраиваются доли пропускных способностей исходящего интерфейса для каждой очереди. Рассмотрим детально алгоритм взвешенного обслуживания очередей и алгоритм очереди с малыми задержками. Алгоритм взвешенного обслуживания очередей
Реализация алгоритмов планировщиков с взвешенным обслуживанием очередей основана на вычисление значения функции «виртуального времени» ( )(tV ) Функция «виртуальное время» отображает количество циклов, пройденных планировщиком к моменту времени t . Исходя из значений этой функции, вычисляется значение параметра «время окончания обслуживания»:
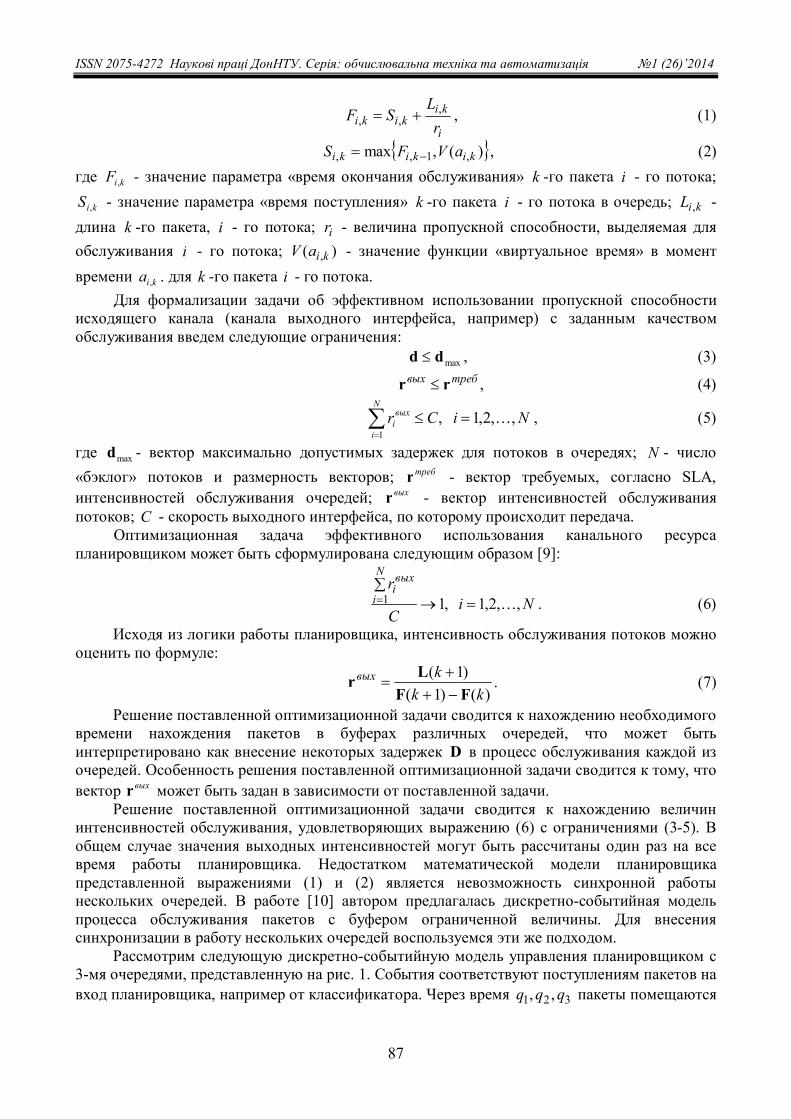
ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
87
i
kikiki r
LSF ,
,, , (1)
)(,max ,1,, kikiki aVFS , (2) где kiF , - значение параметра «время окончания обслуживания» k -го пакета i - го потока;
kiS , - значение параметра «время поступления» k -го пакета i - го потока в очередь; kiL , - длина k -го пакета, i - го потока; ir - величина пропускной способности, выделяемая для обслуживания i - го потока; )( ,kiaV - значение функции «виртуальное время» в момент времени kia , . для k -го пакета i - го потока.
Для формализации задачи об эффективном использовании пропускной способности исходящего канала (канала выходного интерфейса, например) с заданным качеством обслуживания введем следующие ограничения:
,maxdd (3)
,требвых rr (4)
NiCrN
i
выхi ,,2,1,
1
, (5)
где maxd - вектор максимально допустимых задержек для потоков в очередях; N - число «бэклог» потоков и размерность векторов; требr - вектор требуемых, согласно SLA, интенсивностей обслуживания очередей; выхr - вектор интенсивностей обслуживания потоков; C - скорость выходного интерфейса, по которому происходит передача.
Оптимизационная задача эффективного использования канального ресурса планировщиком может быть сформулирована следующим образом [9]:
NiC
rN
i
выхi
,,2,1,11 . (6)
Исходя из логики работы планировщика, интенсивность обслуживания потоков можно оценить по формуле:
)()1()1(
kkkвых
FFLr
. (7)
Решение поставленной оптимизационной задачи сводится к нахождению необходимого времени нахождения пакетов в буферах различных очередей, что может быть интерпретировано как внесение некоторых задержек D в процесс обслуживания каждой из очередей. Особенность решения поставленной оптимизационной задачи сводится к тому, что вектор выхr может быть задан в зависимости от поставленной задачи. Решение поставленной оптимизационной задачи сводится к нахождению величин интенсивностей обслуживания, удовлетворяющих выражению (6) с ограничениями (3-5). В общем случае значения выходных интенсивностей могут быть рассчитаны один раз на все время работы планировщика. Недостатком математической модели планировщика представленной выражениями (1) и (2) является невозможность синхронной работы нескольких очередей. В работе [10] автором предлагалась дискретно-событийная модель процесса обслуживания пакетов с буфером ограниченной величины. Для внесения синхронизации в работу нескольких очередей воспользуемся эти же подходом. Рассмотрим следующую дискретно-событийную модель управления планировщиком с 3-мя очередями, представленную на рис. 1. События соответствуют поступлениям пакетов на вход планировщика, например от классификатора. Через время 321 ,, qqq пакеты помещаются

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
88
в соответствующие буфера емкостью 321 ,, NNN . По мере формирования управляющих воздействий 321 ,, uuu пакеты извлекаются из буферов и обслуживаются с временами обслуживания 321 ,, eee . По мере поступления управляющих воздействий 654 ,, uuu пакет поступает в сеть, а планировщик начинает обслуживать следующую очередь. Для описания динамики работы модели перейдем к уравнениям в пространстве состояний.
Рисунок 1 - Временно-событийный граф с несколькими управляемыми переходами Моменты k -х запусков it переходов соответствуют переменным )(kxi . В соответствии с представленным временно-событийным графом уравнения состояний системы примут вид:
).1()1()1(),1()1()1(
),1()1()1()1()1()1(
),1()1()1(),1()1()1(
)1()1()1(),1()1()1(
),1()1()1(
6389
378
63387
5256
245
32254
4123
112
91121
kuekxkxkukxkx
kxqNkxkxkuekxkx
kukxkxkxqNkxkx
kuekxkxkukxkx
kxqNkxkx
(8)
Или в матрично-векторной форме:
10
)1()1(
3
2
1
N
e
k
ee
qe
eq
ee
q
k
AA
xx

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
89
32
)1()1( 21
NN
e
Nke
Nk
AA
xx
)1()1(
0
3
2
1
3
k
ee
eee
e
Nk
B
ux
,
где Tkxkxkxkxkxkxkxkxkxk ))()()()()()()()()(()( 987654321x , а все
матрицы 3,2,1,1,2, lNi li NA . Изначально буферы каждой из очередей равны. Перепишем (8) в явном виде и для удобства представления разделим вектора управления на два различных следующим образом ( )1( ku , )1(1 ku ):
))1()1()1()(()1( 1210 kukukxkxk 10 BBAAAx . (9)
Введем обозначения: TTq
TT Nkkkk ))1()1()(()(~ xxxx , )1()(~ kuku , )1()(~
11 kuku для 3iN тогда из (9):
),(~)(~
)8()7()6()5()4()3()2()1(
)(
)7()6()5()4()3()2()1(
)()1(
1
10
8
7
5
4
2
1
10
3
2
1
kuku
kkkkkkkkk
kkkkkkkkk
N
N
N
BBA
NNNNNNNNB
NNNNNNNNB
xxxxxxxxx
ANNNNNNNNNANNNNNNNNNANNNNNNNNNANNNNNNNNNANNNNNNNNNANNNNNNNNNANNNNNNNNNANNNNNNNNNA
xxxxxxxxx
а в пространстве состояний (9) будет иметь вид:

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
90
)()()(~)1(~110 kukukk BBxAx . (10)
Данная математическая модель описывает динамику работы планировщика со взвешенным обслуживанием очередей. Однако, как представлено выше, также в сетевых устройствах используются гибридные алгоритмы планировщика. Алгоритм гибридного обслуживания очередей Гибридный алгоритм планировщика подразумевает наличие одной очереди, при появлении в которой пакеты сразу же начинают обслуживаться. Т.е. пакеты не попадают в буфер, а сразу же передаются. Условно можно считать, что буфер в одной из очередей отсутствует. Т.к. модель (рис.1) составлена т.о., что номер по порядку очереди соответствует приоритету трафика в ней, то модель планировщика с гибридным алгоритмом обслуживания очередей будет с нулевым размером буферного пространства впервой очереди. Тогда (8) можно переписать в следующем виде:
).1()1()1(),1()1()1(
),1()1()1()1()1()1(
),1()1()1(),1()1()1(
)1()1()1(),1()1()1(
),1()1()1(
6389
378
63287
5256
245
32154
4123
112
9121
kuekxkxkukxkx
kxqNkxkxkuekxkx
kukxkxkxqNkxkx
kuekxkxkukxkx
kxqkxkx
(11)
Сделаем аналогичные преобразования и, учитывая (9), перепишем (11) в явном виде со следующими обозначениями: TT
qTT Nkkkk ))1()1()(()(~ xxxx , )1()(~ kuku ,
)1()(~11 kuku для 3iN .
).(~)(~
)5()4()3()2()1(
)(
)4()3()2()1(
)()1(
1
10
5
4
2
1
10
2
1
kuku
kkkkkk
kkkk
kk
N
N
BBA
NNNNNB
NNNNNB
xxxxxx
ANNNNNNANNNNNNANNNNNNANNNNNNANNNNNNA
xxxx
xx
Общее уравнение в пространстве состояний для (11) имеет вид, аналогичный (10). Представленная математическая модель позволяет наиболее точно описывать работу планировщика, т.к. здесь учтены такие параметры, как: вносимые задержки при поступлении пакетов в очередь, времена обслуживания пакетов в очередях, буферное пространство каждой очереди; синхронизацию работы очередей. Для осуществления функций управления в представленные математические модели внесены вектора q и e . Ограничение (3) учтено в векторе q , а ограничение (4) – в векторе e соответственно. Вектор e , характеризующий время, затрачиваемое на обслуживание, вносит некоторую долю задержки в ее значение «из конца-в-конец» и фактически «замедляет» поток. В представленных математических моделях логика такова, что вектор управления «корректирует» эти задержки. Следовательно, решив обратную задачу можно найти вектор

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
91
необходимых корректировок для получения оптимального решения согласно (6). Введем следующую переменную:
)()(~0 kuk BxAW , (12)
тогда (11) перепишется в )()1(~
11 kuk BWx . (13) Решая уравнение (13) относительно W можно получить две оценки:
точную, если )1(~ kxW , то );1(~)(11 kxkuB
)1(~)( 11 kxku ТB ; (14) грубую, если )1(~ kxW , то );1(~)(11 kxkuB вектор корректировок вычисляется
согласно (14). Элементы рассчитанного вектора корректировок показывают, какой объем буферного пространства необходимо выделить для пакетов определенной очереди (при наличии в ней такового). Оцененный объем буферного пространства выделяется на время, затрачиваемое планировщиком для обслуживания по одному пакету из каждой очереди.
Выводы В представленной статье произведен анализ средств управления трафиком. На его основе сформулирована задача оптимального использования сетевого ресурса для планировщика с заданными качествами обслуживания. Проанализированы существующие алгоритмы планировщиков. Выявлено, что существующие алгоритмы обладают рядом недостатков, основным из которых является статическое представление их математических моделей. В статье впервые разработаны дискретно-событийные модели работы планировщиков сетевого устройства в базисе Max-Plus алгебры, которые учитывают задержки на обработку запросов и позволяют формализовать процесс синтеза алгоритма управления в пространстве состояний. На основе разработанных моделей и сформулированной задачи оптимального использования ресурсов представлен метод управления трафиком, позволяющий улучшать эффективность использования сетевых ресурсов при заданном уровне качества обслуживания.
Список использованной литературы 1. Дымарский Я.С. Управление сетями связи: принципы, протоколы, прикладные задачи /
Я.С. Дымарский, Н.П.Крутякова, Г.Г.Яновский // Серия изданий «Связь и бизнес». - М.: ИТЦ «Мобильные коммуникации», 2003. – 384 с.
2. ITU-T E.800 (09/2008): Определение терминов, относящихся к качеству обслуживания [Электронный ресурс] / ITU-T. – Режим доступа: http://handle.itu.int/11.1002/1000/9524.
3. Кучерявый Е.А. Управление трафиком и качество обслуживания в сети Интернет / Е.А. Кучерявый. – СПб.: Наука и Техника, 2004. – 336 с.: ил.
4. Aditya Akella. CS 5114 Network Programming Languages Software-Defned Networking [Электронный ресурс] / Aditya Akella, Aaron Gember, Nick McKeown. - Режим доступа: http://www.cs.cornell.edu/courses/CS5114/2013sp/lectures/lec05.pdf.
5. Adan Ivo, Queueing Theory [Электронный ресурс] / Ivo Adan, Jacques Resing. - Режим доступа: http://www.win.tue.nl/~iadan/queueing.pdf.
6. Feng Lu, Weighted Fair Queuing with Differential Dropping [Электронный ресурс] / Lu Feng, Geoffrey M. Voelker, Alex C. Snoeren. – Режим доступа: http://cseweb.ucsd.edu/~snoeren/papers/ewfq-infocom12.pdf.
7. Markaki M. Comparison of packet schedulers for differentiated services in the Internet / M. Marakaki, M.P. Saltouros, I.S. Venieris // Proc. ATM&IP 2000. – U.K., 2000. – РР. 120-125.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
92
8. Braden R., RFC 2309. Recommendations on queue management and congestion avoidance in the Internet [Электронный ресурс] / D. Clark, J. Crowcroft, B. Davie, S. Deering, D. Estrin, S. Floyd, V. Jacobson, G. Minshall, C. Partridge, L.Peterson, K. Ramakrishnan, S.Shenker, J. Wroclawski, and L. Zhang. – Режим доступа: http://tools.ietf.org/pdf/rfc2309.pdf.
9. Лемешко О.В. Модель динамічного балансування мережних ресурсів у телекомунікаційній мережі / О.В. Лемешко, О.Ю. Євсеєва, Д.В. Симоненко // Системи обробки інформації. - 2008. - № 5(72). - С. 71 – 74.
10. Лозинская В.Н. Математические модели компонентов телекоммуникационніх систем / В.Н. Лозинская // Наукові праці Донецького національного технічного університету. Серія: Обчислювальна техніка та автоматизація. - 2013. - Випуск 1 (24). – С. 121-126.
References 1. Dimarskii, J.S., Krutjakova, N.P. and Janovskii, G.G. (2003), Upravlenie setjami svjazi:
principi, protokoli, prikladnie zadachi [Telecommunication Networks menegemant: principles, protocols, applied tasks], Mobilnie kommunikatsii, Moscow, Russia.
2. International Telecommunication Union (2008), “ITU-T E.800 (09/2008): Quality of telecommunication services: concepts, models, objectives and dependability planning – Terms and definitions related to the quality of telecommunication services”, available at: http://handle.itu.int/11.1002/1000/9524 (Accessed 29 April 2014).
3. Kutcherjavii, E.A. (2004), Upravlenie trafikom i kachestvo obslugivanija v seti Internet [Traffic management and quality of service at Internet], Nauka i tehnika, Saint-Petersburb, Russia.
4. Aditya Akella, Aaron Gember and Nick McKeown (2013), “Network Programming Languages Software-Defned Networking”, available at: http://www.cs.cornell.edu/courses/CS5114/2013sp /lectures/lec05.pdf (Accessed 29 April 2014)
5. Adan Ivo and Jacques Resing (2002), “Queueing Theory”, available at: http://www.win.tue.nl/~iadan/queueing.pdf (Accessed 29 April 2014).
6. Feng Lu, Voelker M., Geoffrey and Snoeren C., Alex, “Weighted Fair Queuing with Differential Dropping”, available at: http://cseweb.ucsd.edu/~snoeren/papers/ewfq-infocom12.pdf (Accessed 29 April 2014)
7. Markaki, M., Saltouros, M.P. and Venieris, I.S. (2000) “Comparison of packet schedulers for differentiated services in the Internet”, IFIP ATM&IP 2000, Procedings of the IFIP ATN&IP 2000, U.K., pp 120-125.
8. Lemeshko O.V., Evseeva, O.J. and Simonenko D.V. (2008), “Dynamic balancing network resources model at telecommunication network”, Systems of information processing, vol. 5, no. 72, pp. 71-74.
9. Lozinskaya, V.N. (2013), “Mathematical models of telecommunication network components”, Naukovi pratsi Donetskogo natsionalnogo tehnichnogo univercitety. Ser.:Obchysljuvalna technika ta avtomatyzatsija, vol.1, no. 24, pp. 121-126.
Надійшла до редакції: Рецензент: 30.04.2014 д-р техн. наук, проф. Скобцов Ю.О.
І.В. Дегтяренко, В.М. Лозинська ДВНЗ «Донецький національний технічний університет» Динамічні моделі засобів управління трафіком в мережевому вузлі. Розроблено математичні моделі планувальника, як засобу управління трафіком в мережевому вузлі. Моделі, що надані, дозволяють підвищити ефективність використання мережевих ресурсів за рахунок управління розміром буферного простору кожної з черг планувальника. Запропоновані математичні моделі відтворюють динаміку роботи планувальника в

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
93
просторі станів, а перехід до базису Max-plus алгебри дозволяє отримати задані оцінки, з урахуванням необхідних параметрів якості обслуговування. Ключові слова: параметри якості обслуговування, засоби управління трафіком, дисципліна обслуговування черги, Max-plus алгебра, дискретно-подієва система, простір станів.
I.V. Degtiarenko, V.M. Lozinskaya Donetsk National Technical University Dynamic models of traffic control means in a network node. We developed a mathematical model of a scheduler as a tool of traffic control in a network node. These models allow increasing the performance of network resources through the control of buffer space size for each scheduler queue. The mathematical models reflect the dynamics of the scheduler’s work in state space, and transition to Max-plus algebra basis allows obtaining given estimates taking into account the required parameters of service quality. Keywords: service quality parameters, traffic controls, queue service discipline, Max-plus algebra, discrete-event system, state space.
Дегтяренко Илья Вячеславович, Украина, закончил Донецкий национальный технический университет, канд. техн. наук, доцент, доцент кафедры автоматики и телекоммуникаций ГВУЗ «Донецкий национальный технический университет» (ул. Артема, 58, г. Донецк, 83001, Украина). Основное направление научной деятельности – методы анализа нестационарных сигналов, методы управления ресурсами телекоммуникационных сетей.
Лозинская Виктория Николаевна, Украина, закончила Донецкий национальный технический университет, ассистент кафедры автоматики и телекоммуникаций ГВУЗ «Донецкий национальный технический университет» (ул. Артема, 58, г. Донецк, 83001, Украина). Основное направление научной деятельности – разработка и модернизация современных методов и алгоритмов управления трафиком, повышение эффективности использования сетевых ресурсов телекоммуникационных сетей.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
© Дмитриева О.А., 2014 94
УДК 004.272.2:519.63
О.А. Дмитриева (д-р техн. наук, проф.) ГВУЗ «Донецкий национальный технический университет», г. Донецк
кафедра прикладной математики и информатики e-mail: [email protected]
ОПТИМИЗАЦИЯ ВЫПОЛНЕНИЯ МАТРИЧНО-ВЕКТОРНЫХ ОПЕРАЦИЙ ПРИ ПАРАЛЛЕЛЬНОМ МОДЕЛИРОВАНИИ ДИНАМИЧЕСКИХ ПРОЦЕССОВ
Рассматриваются вопросы параллельной организации процессов моделирования динамических задач большой размерности, которые описываются системами обыкновенных дифференциальных уравнений. Учет разреженности матриц коэффициентов позволяет значительно сократить трудоемкость численной реализации динамических моделей, так как каждый шаг интегрирования таких задач, по обыкновению, сводится к выполнению матричных или матрично-векторных операций, от оптимальной реализации которых зависит возможность получения эффективного решения с применением параллельных ЭВМ. Особое внимание уделено способам компактного размещения элементов матриц в памяти, выполнению матричных операций, а также распределению ресурсов многопроцессорных систем при работе с разреженными матрицами. Ключевые слова: задача Коши, разреженные матрицы, параллельный метод, упаковочный формат, альтернативный формат, ускорение.
Общая постановка проблемы Рассматривая особенности моделирования линейных динамических систем (1), нельзя
не признать, что в параллельных вычислительных системах с распределенной памятью наиболее трудоёмкими с вычислительной и коммуникационной точек зрения являются операции вычисления матричного и матрично-векторного произведений [1]. Поэтому ускорение параллельного выполнения этих базовых операции линейной алгебры определяет сокращение времени реализации метода решения линейной задачи в целом.
)()(' tftDxx , TN txtxtxtx ))(),...,(),(()( 002010 , (1)
где D – матрица размерностью N×N с постоянными коэффициентами. Необходимо отметить, что моделирование сложных динамических систем в механике,
теплотехнике, электродинамике и других отраслях связано с составлением и решением систем дифференциальных и интегро-дифференциальных уравнений, порядок которых может быть очень большим в зависимости от сложности системы и требований к получаемым результатам [2]. Кроме того, отличительной чертой моделей большой размерности, как и вообще больших систем разной природы, является разреженная структура технологических матриц [3-4]. Примером могут служить решение уравнений в частных производных методами конечных разностей или конечных элементов, неявные разностные схемы, которые описывают решение краевых задач или задач Коши [2,5]. При работе с матрицами большой размерности ресурсные затраты на представление одной большой системы как совокупности подсистем, каждая из которых характеризуется активным взаимодействием составных компонентов и имеет сравнительно незначительную плотность внешних связей с другими подсистемами, могут быть неоправданными. Кроме того, несмотря на значительную разреженность, технологические матрицы не всегда структурированные, что не позволяет применять для их расчета эффективные методы анализа [6].

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
95
Постановка задач исследования Использование известных на сегодняшний день высокоэффективных алгоритмов
Штрассена [7], Копперсмита и Винограда [8], ориентированных на заполненные матрицы коэффициентов, позволяет значительно сократить трудоемкость численной реализации динамических моделей, которые описываются системами обыкновенных дифференциальных уравнений, так как каждый шаг интегрирования таких задач, по обыкновению, сводится к выполнению матричных или матрично-векторных операций [1, 9]. Но эти алгоритмы не учитывают разреженный характер матриц и особенности параллельной реализации. Существует класс специальных блочных алгоритмов умножения матрицы на матрицу или на вектор, которые являются модификацией классических параллельных алгоритмов, а именно, алгоритмов Кеннона и Фокса [10]. Но и эти алгоритмы не дают преимуществ на разреженных матрицах, в которых число элементов отличных от нуля незначительно в сравнении с количеством нулевых элементов. В то же время, разреженная матричная структура динамических моделей является важной предпосылкой для построения алгоритмов, которые наиболее полно, исходя из критериев вычислительной эффективности, используют разреженность.
Среди множества определений разреженной матрицы в данной работе принято то, которое утверждает, что приписывание матрице свойства разреженности эквивалентно утверждению о существовании алгоритма, использующего ее разреженность и делающего вычисления с ней дешевле по сравнению со стандартными алгоритмами [11]. Поэтому основное внимание в работе уделяется созданию эффективных алгоритмов, учитывающих разреженность используемых матриц, которые представляются в упакованном виде, а также распределению ресурсов многопроцессорных систем при работе с разреженными матрицами.
Генерация альтернативного формата для представления разреженных матриц Несмотря на то, что вопросы выполнения матричных или матрично-векторных
операций сравнительно редко представляют самостоятельный интерес для применений, от эффективной реализации таких задач часто зависит результативность математического моделирования, поскольку значительная часть численных методов включает в себя выполнение операций такого типа как элементарный шаг соответствующего алгоритма [11–12]. Кроме того, отличительной особенностью матричных операций при моделировании реальных объектов, является, как правило, большая размерность и разреженность. В работе для решения проблемы большой размерности и высокой степени разреженности матрицы разработан формат хранения разреженных матриц, преимущество которого состоит в возможности параллельного выполнения любых матричных операций без распаковывания, что значительно сокращает время выполнения операций и объем занимаемой памяти.
1 2 3 4 5 6 7 8 9 101 0 1 0 3 0 0 0 5 0 0
A 2 0 0 2 0 0 0 0 0 0 03 0 0 0 0 0 3 0 1 0 0
Строка 1 1,2 , 3,4 , 5,8
Строка 2 2,3
Строка 3 3,6 , 1,8
Рисунок 1 – Представление матрицы в альтернативном формате Альтернативой известному и наиболее часто используемому формату хранения
разреженных матриц RR(C)O (row — wise representation complete and ordered) [11–12] в работе предлагается формат, схема хранения данных в котором изображена на рис. 1. В этом случае все ненулевые элементы исходной разреженной матрицы сохраняются в одном

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
96
массиве. Каждый элемент массива представляет, в свою очередь, двухэлементный вектор, первый элемент которого содержит ненулевое значение исходной матрицы, второй - номер столбца исходной матрицы, в котором он находился. Номер строки каждого элемента нового массива соответствует номеру той строки, в которой он находился в исходной матрице.
Согласно алгоритму, приведенному в [11], для упаковки разреженной матрицы в формат RR(C)O нужно осуществить подсчет количества ненулевых элементов, при этом для матрицы N N с количеством ненулевых элементов z нужно выполнить N N сравнений, z N N операций сложения и непосредственную упаковку матрицы. Это действие требует N N операций сравнения, N 2z операций переприсваивания, 2z N N операций сложения. Для представления разреженной матрицы в альтернативном формате нужно создать маску нового массива, для чего выполнить N N сравнений, 2z N N сложений, 2N присваиваний, и осуществить упаковку матрицы, на которую потребуется N N сравнений, 2z N N сложений, 2N присваиваний. Исходя из приведенных данных видно, что второй этап для создания альтернативного упаковочного формата требует меньше операций, что приводит к снижению временных затрат на подготовительный этап. Данные выводы подкрепляются практическими результатами. Сравнительная характеристика затрат времени на упаковку разреженной матрицы разных размеров представлена на рис. 2.
Рисунок 2 – Зависимость затрат времени на упаковку от размерности матрицы
Итак, с ростом мерности матрицы время, необходимое на ее упаковку, растет, однако
уже на этом этапе использование альтернативного формата дает преимущество во времени, тем большее, чем больше размерность матрицы. Затраты времени на упаковку матрицы в специальные форматы зависят от степени разреженности матрицы, поэтому при фиксированной размерности данные затраты можно считать постоянными. В дальнейшем затраты на упаковку упоминаться не будут, поскольку целью является минимизация переменных затрат, которые будут увеличиваться с ростом размерности матрицы и интервала поиска решения. Анализ соотношения временных постоянных и переменных затрат проводился на примере реализации стадийного метода для систем дифференциальных уравнений размерностью 100, 1000 и 5000 со степенями разреженности 128, 256 и 512. Работа с матрицей в упаковочном формате осуществлялась в 3 этапа. Проводился подсчет количества ненулевых элементов исходной матрицы коэффициентов, осуществлялась упаковка матрицы и проведение вычислительных операций.
С ростом степени разреженности матрицы увеличивается часть постоянных затрат на реализацию метода. К ним отнесены затраты на подсчет количества ненулевых элементов матрицы и затраты времени на упаковку матрицы. Кроме того, поскольку с ростом степени разреженности матрицы снижается время вычислений (переменные затраты, поскольку прямо зависят от длины интервала поиска решения и шага, с которым осуществляется поиск), то часть постоянных затрат с ростом разреженности матрицы также растет.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
97
Моделирование динамических процессов с представлением разреженных матриц в альтернативном формате
В работе для моделирования динамических процессов используется частный случай системы дифференциальных уравнений с особой правой частью (1), которая представляет собой линейную зависимость от x(t).
Матрица коэффициентов D характеризуется большой размерностью и является разреженной. В таких случаях временные затраты на получение численного решения стадийными методами без предварительной подготовки матрицы можно считать неоправданно высокими [13]. Для их снижения был использованный предложенный в работе упаковочный формат хранения матрицы коэффициентов. Исследование эффективности использования данных форматов проводилось на линейной модели вида (1) со случайно сгенерированными коэффициентами матрицы D различной степени разреженности.
Поскольку целью хранения разреженной матрицы в упаковочном формате было не только сокращение объемов используемой памяти, но и повышение скорости выполнения вычислительных операций, то главным критерием эффективности использования формата считалось соотношение экономии затрат времени и памяти на реализацию явных и неявных стадийных методов, с помощью которых в работе осуществлялся поиск решения системы уравнений (1). Базовыми для сравнения эффективности упаковочных форматов хранения считались ресурсные затраты, необходимые для реализации стадийных методов без использования специальных алгоритмов.
Рисунок 3 – Затраты времени на поиск решения системы мерностью 1000 на интервале 0-2 Задачей первого эксперимента было выяснение зависимости экономии времени и
памяти, которая достигается благодаря использованию упаковочных форматов для системы дифференциальных уравнений размерностью 1000 на интервале от 0 до 2 с фиксированным шагом интегрирования, от разной степени разреженности матрицы коэффициентов. На рис. 3 приведено время, которое затрачено на поиск решения (1) диагонально неявным параллельным стадийным методом [13] для матриц с разреженностью 128, 256 и 512 соответственно, которые представлялись в форматах RR(C)O и предложенном в работе альтернативном. Итак, благодаря использованию разработанного формата, удалось сократить время на выполнение задачи в среднем на 10%. Что касается памяти, то для данного эксперимента необходимо было от 60000 до 24000 байт памяти в зависимости от степени разреженности матрицы. Чем она выше, тем меньше были ресурсные затраты, которые можно увидеть на рис. 4. При этом благодаря использованию альтернативного формата размер необходимой памяти удалось снизить, по меньшей мере, на 30% в сравнении с форматом RR(C)O. Для работы с системой без упаковки элементов понадобилось, в среднем, в два раза больше памяти, чем для работы с использованием специальных алгоритмов.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
98
Рисунок 4 – Затраты памяти на поиск решения системы мерностью 1000 на интервале 0-2
С ростом размерности системы дифференциальных уравнений до 5000 время,
израсходованное на поиск решения в упаковочном формате, увеличилось в среднем в 20 раз, но благодаря использованию альтернативного формата удалось сэкономить время получения результата приблизительно на 10% в сравнении со стандартным форматом RR(C)O. Экономия памяти составляла в среднем 35% и зависела от степени разреженности матрицы коэффициентов системы. Такие зависимости сохранялись и при увеличении интервала поиска решения.
Выводы 1. Исходя из того факта, что большие линейные системы дифференциальных
уравнений, которые описывают поведение динамических объектов, как правило, имеют разреженные матрицы коэффициентов, для их описания и численной реализации в работе предложено использование альтернативного упаковочного формата. При этом выигрыш времени прямо зависит от степени разреженности матрицы исходной системы. Сокращение количества выполняемых операций происходит за счет невыполнения операций с нулевыми элементами, а сокращение объема памяти за счет хранения только отличных от нуля элементов и информации об их расположении. Преимущество данного подхода растет с увеличением интервала поиска решения и со снижением длины шага.
2. Разработанный альтернативный упаковочный формат хранения матриц, который используется в работе в качестве альтернативы стандартному упаковочному формату RR(C)O, позволил сократить время реализации моделирования динамических систем большой размерности и объем используемой памяти. Благодаря использованию альтернативного формата удалось сократить время получения результата примерно на 10% по сравнению со стандартным форматом RR(C)O. Экономия памяти достигала, в среднем, 35% и зависела от степени разреженности матрицы коэффициентов системы. Такая зависимость сохранялась и при расширении интервала поиска решения.
3. Показано, что относительная доля ресурсных затрат на операции, которые выполняются параллельно, в общем количестве израсходованных времени и памяти возрастает с ростом степени разреженности матрицы коэффициентов. Это связано с тем, что общее количество затрат уменьшается за счет сокращения ресурсных затрат на использование многократных операций, а размер затрат, необходимых на упаковку матрицы остается неизменным.
Список использованной литературы 1. Дмитрієва О.А. Організація високопродуктивних обчислень в динамічних задачах з
розрідженими матрицями / О. А. Дмитриева, О.М. Григор’єва // Вісник Східноукраїнського національного університету ім. В.Даля. –2012. – № 2(173). – С. 85–89. – ISSN 1998-7927

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
99
2. Dmitrieva O., Firsova A. Parallel Algorithms of Simulation. Increase of simulation of dynamic objects with the lumped parameters into parallel computer systems. - Lambert Academic Publishing. – 2012. – 192 p.
3. Баландин М. Ю. Методы решения СЛАУ большой размерности / М. Ю. Баландин, Э. П. Шурина. – Новосибирск: Изд-во НГТУ, 2000. – 70 с.
4. Yuster R. Fast sparse matrix multiplication [Электронный ресурс] / R. Yuster, U. Zwick.. – 2007. – Режим доступа: http://www.cs.tau.ac.il/~zwick/ papers/sparse.pdf.
5. Raz R. On the complexity of matrix product / R. Raz // SIAM Journal on Computing. – 2003. – Vol.32. – P.1356–1369.
6. Genseberger M. Improving the parallel performance of a domain decomposition preconditioning technique in the Jacobi–Davidson method for large scale eigenvalue problems / M. Genseberger // Applied Numerical Mathematics – 2010. – Vol. 60, № 11. – P. 1083–1099.
7. Strassen V. Gaussian elimination is not optimal / V. Strassen // Numerische Mathematik. – 1999. – Vol.13. – P.354–356.
8. Coppersmith D. Matrix multiplication via arithmetic progressions / D. Coppersmith, S. Winograd // Journal of Symbolic Computation. – 1990. – Vol.9. – Р. 251–280.
9. Голуб Д. Матричные вычисления / Д. Голуб, Ч. Ван Лоун; пер. с англ. – М.: Мир, 1999 – 548 с. – ISBN 5-03-002406-9
10. Solving Problems on Concurrent Processors / [G. Fox, M. Johnson, G. Lyzenga, S. Otto, J. Salmon, D. Walker]. – Prentice Hall, 1990. – 350 p. – ISBN 978-0138297145.
11. Писсанецки С. Технология разреженных матриц / С. Писсанецки; пер. с англ. – М. Мир, 1988. – 410 с. – ISBN 5-03-000960-4.
12. Davis T. Direct Methods for Sparse Linear Systems / T. Davis. – Philadelphia: SIAM, 2006. – 217 p. – ISBN 0-89871-613-6.
13. Дмитрієва О.А. Паралельні різницеві методи розв'язання задачі Коші / О. А. Дмитрієва. – Донецьк: ДонНТУ, 2011. – 265 с. – ISBN 978-966-377-104-5.
References 1. Dmitrіеva, O. A. and Grigoryeva, O. M., (2012), “Organisation of highly productive
calculations in dynamic problems with sparse matrices”, Vіsnik Shіdnoukrainskogo nacіonalnogo unіversitetu іm. V. Dalja, vol. 2(173), pp. 85–89.
2. Dmitrieva and O., Firsova, A., (2012), Parallel Algorithms of Simulation. Increase of simulation of dynamic objects with the lumped parameters into parallel computer systems, Lambert Academic Publishing, Saarbrücken, Germany.
3. Balandin, M. Ju. and Shurina, P., (2002), Metody reshenija SLAU bolshoj razmernosti [Methods of the decision of SLAE of big dimension], Novosibirsk, NSTU, Rossija.
4. Yuster, R., and Zwick, U., (2007), Fast sparse matrix multiplication, available at: http://www.cs.tau.ac.il/~zwick/ papers/sparse.pdf.
5. Raz, R., (2003), “On the complexity of matrix product”, SIAM Journal on Computing, vol.32, pp.1356–1369.
6. Genseberger, M., (2010), “Improving the parallel performance of a domain decomposition preconditioning technique in the Jacobi–Davidson method for large scale eigenvalue problems”, Applied Numerical Mathematics, vol. 60, № 11, pp. 1083–1099.
7. Strassen, V., (1999), “Gaussian elimination is not optimal”, Numerische Mathematik, vol.13, pp.354–356.
8. Coppersmith, D. and Winograd, S., (1990), “Matrix multiplication via arithmetic progressions”, Journal of Symbolic Computation, vol.9, pp. 251–280.
9. Golub, D. and Loun, Van Ch. (1999), Matrichnye vychislenija [Matrix computations], Translated by Voevodin V. V., Mir, Moscow, Russia.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
100
10. Fox, G., Johnson, M., Lyzenga, G., Otto, S., Salmon, J. and Walker, D., (1990), Solving Problems on Concurrent Processors, Prentice Hall.
11. Pissanecki, S., (1988), Tehnologija razrezhennyh matric [Sparse Matrix Technology], Translated by Ikramov X. D. and Kaporin I. E., Mir, Moscow, USSR.
12. Davis, T., (2006), Direct Methods for Sparse Linear Systems, SIAM, Philadelphia. 13. Dmitrіeva, O. A., (2011), Paralel'nі rіznicevі metodi rozv'jazannja zadachі Caushі [Parallel
differential methods of the solution of Cauchy problem], DonNTU, Donetsk, Ukraine.
Надійшла до редакції: Рецензент: 12.05.2014 д-р техн. наук, проф. Фельдман Л.П.
О.А. Дмитрієва ДВНЗ «Донецький національний технічний університет» Оптимізація виконання матрично-векторних операцій при паралельному моделюванні динамічних процесів. Розглядаються питання паралельної організації процесів моделювання динамічних задач великої розмірності, які описуються системами звичайних диференціальних рівнянь. Урахування розрідженості матриць коефіцієнтів дозволяє значно скоротити трудомісткість чисельної реалізації динамічних моделей, тому що кожний крок інтегрування таких задач, зазвичай, зводиться до виконання матричних або матрично-векторних операцій, від оптимальної реалізації яких залежить можливість одержання ефективного розв’язку із застосуванням паралельних ЕОМ. Особлива увага приділена способам компактного розміщення елементів матриць у пам'яті, виконанню матричних операцій, а також розподілу ресурсів багатопроцесорних систем при роботі з розрідженими матрицями. Ключові слова: задача Коші, розріджені матриці, паралельний метод, пакувальний формат, альтернативний формат, прискорення. О.А. Dmitrieva Donetsk National Technical University Optimization of performance of matrix and vector operations in parallel simulation of dynamic processes. The paper considers the questions of parallel organization of processes of big dimension dynamic problems modeling described by systems of ordinary differential equations. Accounting of sparseness of coefficient matrixes allows reducing considerably the labor input of numerical realization of dynamic models, as each step of integration of such tasks is usually reduced to the performance of matrix or matrix-vector operations, the optimum realization of which provides a possibility of obtaining an effective solution using parallel computers. Special attention is paid to the ways of compact placement of matrix elements in the memory, to performance of matrix operations, and to distribution of resources of multiprocessor systems during the work with sparse matrixes. Key words: Cauchy problem, sparse matrixes, parallel method, packing format, alternative format, acceleration.
Дмитриева Ольга Анатольевна, Украина, докт. техн. наук, профессор кафедры прикладной математики и информатики ГВУЗ «Донецкий национальный технический университет» (ул. Артема, 58, г. Донецк, 83001, Украина). Основное направление научной деятельности – параллельное моделирование сложных динамических объектов с сосредоточенными параметрами.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Oбчислювальна техніка та автоматизація №1 (26)’2014
© Євсеєва О. Г., 2014 101
УДК 372.851:[378.4+621]:004
О. Г. Євсеєва (д-р педагогічних наук, доцент) ДВНЗ «Донецький національний технічний університет», м. Донецьк
кафедра вищої математики e-mail: [email protected]
ВИКОРИСТАННЯ КОМП’ЮТЕРНО ОРІЄНТОВАНИХ ЗАСОБІВ ПРОЕКТУВАННЯ І ОРГАНІЗАЦІЇ НАВЧАННЯ МАТЕМАТИКИ НА ЗАСАДАХ
ДІЯЛЬНІСНОГО ПІДХОДУ В ТЕХНІЧНОМУ УНІВЕРСИТЕТІ
Розглянуто компю‘терно-орієнтовані засоби навчання математики у технічному університеті. Запропоновано авторський програмний засіб «Автоматизоване робоче місце викладача математики у ВТНЗ». Особливістю технології проектування навчання, що реалізується у розробленій програмі, є використання п‘ятикомпонентної предметної моделі студента, яка уможливлює створення навчально-методичних матеріалів, спрямованих на покрокове опанування навчальними діями. Ключові слова: навчання математики, діяльнісний підхід, компю‘терно-орієнтовані засоби навчання, автоматизоване робоче місце викладача математики.
Постановка проблеми в загальному вигляді та її зв'язок з важливими науковими і практичними завданнями
Питання розвитку математичного складника вищої інженерної освіти проаналізовано в роботах таких вітчизняних учених, як: Н. А. Вірченко, К. В. Власенко, В. І. Клочко, В. В. Корнещук, Т. В. Крилова, О. Я. Кучерук, Л. І. Нічуговська, В. А. Петрук, М. В. Працьовитий, І. М. Реутова, С. О. Семеріков, В. Г. Скатецький, О. І. Скафа, П. О. Стеблянко та ін. У дослідженнях цих вчених увага зосереджена на фундаменталізації, диференціації, інтенсифікації, комп’ютеризації та професійній спрямованості навчання математики у ВНЗ, на розробленні методичних систем і технологій формування прийомів професійно орієнтованої діяльності майбутніх інженерів.
Водночас для сучасної інженерної освіти характерна низка негативних тенденцій. Скорочення кількості годин, передбачених для вивчення математичних дисциплін, суперечить посиленим вимогам до якості фундаментальної підготовки випускника ВТНЗ. Домінування традиційних методів і форм організації навчання математики ускладнює діяльність викладачів з підвищення якості навчання математичних дисциплін, із наповнення його елементами, що мають професійно значущий характер.
Аналіз стану проблеми забезпечення якості навчання математики у ВТНЗ показує, що більш ніж 80% студентів сприймають математику як суто абстрактну дисципліну, не відчувають потреби в розширенні й поглибленні математичної підготовки і не можуть використовувати знання і вміння з математики при вивченні спеціальних дисциплін, орієнтованих на майбутню професію.
Вище викладене підтверджує необхідність розробки такої методичної системи навчання математики, яка б дала можливість викладачам ВТНЗ в реаліях сьогодення здійснювати науково-обґрунтовану модернізацію навчання, забезпечити формування професійної компетентності майбутніх інженерів. Така методична система може бути розроблена на засадах діяльнісного підходу.
Базою для розвитку діяльнісного підходу до навчання є психологічна теорія діяльності, започаткована О. М. Леонтьєвим [5]. Навчання на засадах діяльнісного підходу відбувається на основі концептуального положення теорії діяльності про те, що розвиток

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
102
студента, а значить і результати його навчання, залежать від діяльності, яку він виконує у навчанні. При цьому цілями навчання є опанування навчальними діями, які складають основу способів дій майбутньої професійної діяльності фахівців [3].
Важливим елементом методичної системи навчання є засоби проектування і організації навчання, серед яких на сучасному етапі розвитку суспільства головне місце мають посягати комп‘ютерно-орієнтовані засоби. В той же час, якщо засоби організації навчання використовуються достатньо широко, то засобів проектування навчання математики студентів ВТНЗ практично не представлено в сучасних освітніх технологіях.
Аналіз останніх досліджень і публікацій Під засобами навчання розуміються об’єкти будь-якої природи, що формують
навчальне середовище і використовуються викладачем і студентами в процесі навчальної діяльності [9] та ін.
Дидактична мета засобів навчання: зменшення витрат часу; передача необхідної для навчання інформації; розгляд об’єкта або явища, що вивчається, частинами і загалом; забезпечення діяльності студентів і викладачів.
Функції засобів навчання багатогранні: виховні, розвивальні, навчальні, коригувальні і контролюючі. За допомогою відповідних засобів навчання можна розкривати зміст і обсяг нових понять, демонструвати різні підходи до доведення теорем і розв’язування задач, формувати вміння і здійснювати керування різними видами навчальної діяльності, в тому числі й професійно орієнтованої діяльності, підвищувати і підтримувати інтерес до вивчення предмета.
У навчанні математики студентів ВТНЗ, побудованому на засадах діяльнісного підходу, діяльністю викладача полягає у проектуванні і організації професійно орієнтованої навчальної діяльності студентів, тому дамо характеристику тим засобам, які, поряд із традиційними, необхідно використовувати в процесі організації й керування такою діяльністю.
Аналіз сучасної науково-методичної літератури свідчить про тенденцію широкого застосування інформаційно-комунікаційних технологій навчання (ІКТ) у навчальному процесі. Інформаційно-комунікаційні технології навчання – це система загально-педагогічних, психологічних та дидактичних процедур взаємодії викладачів і студентів з використанням технічних ресурсів, яка спрямована на реалізацію змісту, методів, форм та засобів навчання, адекватних цілям освіти, індивідуальним особливостям студентів та вимогам до формування інформаційно орієнтованих якостей грамотної людини [7].
Використання ІКТ у навчанні математики можливо за рахунок створення і використання комп’ютерно-орієнтованих засобів навчання, до складу яких ми відносимо програмні педагогічні засоби (ППЗ), такі як навчальні програми і програмні комплекси, та прикладні програмні засоби, такі як програми комп’ютерної математики, пакети прикладних програм тощо. Комп’ютерно-орієнтовані засоби навчання забезпечують:
– індивідуалізацію і диференціацію навчання; – здійснення контролю зі встановленням зворотного зв’язку, діагностикою та більш об’єктивним і
швидшим оцінюванням результатів; – здійснення самоконтролю і самокорекції; – можливості здійснення за його допомогою самопідготовки; – наочність; – моделювання та імітацію процесів і явищ, що досліджуються; – посилення мотивації навчання; – озброєння студентів стратегією засвоєння навчального матеріалу; – формування логічного мислення, вміння приймати варіативні рішення; – розвиток творчих здібностей особистості. Проте використання комп’ютерно-орієнтованих засобів навчання в процесі навчання
математики не повинно стати самометою, воно має бути педагогічно доцільним і виправданим.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
103
Метою статті є аналіз комп’ютерно-орієнтованих засобів навчання математики у технічному вищому навчальному закладі та опис структури і можливостей авторської програми проектування навчання математики «Автоматизоване робоче місце викладача математики у ВТНЗ».
Результати У навчальному процесі з математики вже на першому курсі має бути передбачена робота з
такими програмними педагогічними засобами, як DERIVE, NUMERI, Maple, Mathematica, EUREKA, MathCAD, GRAN тощо [8]. Використовуючи сучасні комп’ютерні пакети, викладач може ефективно реалізувати принцип залучення студентів до навчальної діяльності незалежно від рівня їх попередніх знань з окремих розділів курсу вищої математики, і студенти зможуть нарівні з іншими опанувати матеріал теми.
Наприклад, при вивченні розділу «Лінійна алгебра» можна використовувати демонстраційні програми (авторські, мультимедіа, CD-енциклопедії, довідники), комп’ютерні навчальні системи, практикуми, засновані на маніпуляційних взаємодіях студента і програми, тренажери, тестові програми відео і аудіо фрагменти. Так, для контролю знань з теми «Системи n-лінійних рівнянь з n-невідомими» можна використовувати програму «My test», за допомогою якої проводиться комп’ютерне тестування студентів. Програма «My test» це – система програм (програма тестування студентів, редактор тестів і журнал результатів) для створення і проведення комп’ютерного тестування, збору та аналізу результатів, виставляння оцінок за певною шкалою. У програмі є багаті можливості форматування тексту питань і варіантів відповідей. До кожного завдання можна задати складність (кількість балів за правильну відповідь), прикріпити підказку (яка може показуватися за штрафні бали) і пояснення правильної відповіді (виводиться у випадку помилки у навчальному режимі), настроїти інші параметри. Є можливість використовувати кілька варіантів питань до завдання, зручно створювати вибірку завдань для студентів, перемішувати завдання і варіанти відповідей [7].
Для проведення лабораторних занять пропонуємо використовувати систему комп’ютерної математики Mathcad. Наприклад, Mathcad викладачеві можна застосовувати для швидкого знаходження визначників і обернених матриць при розв’язанні систем лінійних алгебраїчних рівнянь, для перевірки відповідей, які отримали студенти, тощо.
Труднощі обчислення у курсі вищої математики можуть бути вирішені за допомогою системи Derive, повна назва якої Derive a Mathematical Assistant (математичний помічник Derive), фірми Soft Warehouse. Ця програма належить до класу комп’ютерних систем для автоматизації математичних обчислень і, перш за все, символьних (аналітичних) перетворень. Derive – система символьної математики, тобто вона вміє працювати з символами, розкладати многочлени на множники, обчислювати невизначені інтеграли тощо.
Організації навчальної діяльності й керуванню нею у курсі вищої математики сприяють і такі ППЗ як GRAN, а саме: підтримці знаходження циклів «відкриття» шляхом діалогу зі студентами, висуванню гіпотез і їх перевірки з опорою на наочність (графіки), а також підготовці умов для нового розуміння задачі. Студент таким чином усвідомлює потребу доводити і розуміє з якою метою і навіщо він це робить. У зв’язку з цим він освоює відповідні навчальні дії.
У процесі навчання важливо не лише обґрунтовано визначити обсяг навчального матеріалу, який необхідно вивчити, а й створити умови для достатньої мотивації щодо створення власного навчального продукту діяльності. Засобом формування такої діяльності можуть слугувати GRAN-2D, GRAN-3D [4].
Дуже корисним є розроблений С.А. Раковим [6] пакет динамічної геометрії (DG) для підтримки конструктивного підходу до вивчення геометрії. Пакет DG забезпечує можливості інтерактивної побудови геометричних об’єктів за допомогою електронних аналогів циркуля і лінійки, інтерактивного маніпулювання ними з динамічним відображенням результатів

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
104
вимірювання їх характеристик. Усе це дозволяє значно знизити трудомісткість побудов і створює реальні умови для впровадження його у практику математичної освіти.
Методичною вимогою до засобів сучасних інформаційних технологій освіти є орієнтація на операційні середовища, ППЗ модельного типу, за допомогою яких можна реалізувати ідеї діяльнісного підходу до навчання математики. Операційні середовища – це інтерактивні програми, орієнтовані на організацію навчально-пізнавальної діяльності на основі комп’ютерних програм. Вони забезпечують умови для осмислення задач, дослідження закономірностей на підставі формулювання гіпотез із їх подальшою перевіркою. Операційні середовища сприяють залученню студентів до навчальної діяльності, під час якої формуються предметні вміння. Діяльнісний підхід дозволяє наочно й ефективно організувати діяльність студентів, оскільки моделює реальну навчальну діяльність.
На тих же принципах застосування діяльнісного підходу до навчання побудовані комп’ютерні навчальні програми із системи евристико-дидактичних конструкцій (ЕДК) [7], що розробляються в Донецькому національному університеті.
На відміну від існуючих програмних засобів розроблені програми із системи ЕДК поступово наближають студентів до пошуку розв’язування задачі через організацію їх навчальної діяльності. Знаходження відповідей відбувається, наприклад, під час евристичного діалогу, коли увага акцентується на деяких методах розв’язування задачі, пропонується «розмите наведення» на пошук розв’язку і надається можливість самостійно знайти «свій шлях» до відкриття, розв’язування і перевірки результатів.
Організовуючи самостійну навчальну діяльність нами на основі поетапного опанування математичних дій розроблені комп’ютерні програми «Задача-метод», «Задача-софізм» за деякими темами курсу вищої математики для ВТНЗ, засновані на принципах побудови ЕДК. Наприклад, за темою «Системи n-лінійних рівнянь з n-невідомими» у програмі «Задача-метод» пропонується система завдань, до кожної з яких студент повинен знайти правильний і раціональний, на його погляд, спосіб розв’язування. Отже, на екрані з’являється перше завдання із запропонованими способами розв’язування. При правильному і раціональному виборі способу розв’язування випливає тригер з відомостями про те, що задача розв’язана правильно. В іншому випадку програма надає корекцію.
Програма «Задача-софізм» представляє собою ланцюжок виконаних дій з розв’язування завдання, де на якомусь етапі припущено помилку. Мета завдання – знайти помилку в міркуванні. Кожне завдання, що входить у систему завдань за темою, надається з покроковим розв’язанням. При правильному виборі помилкового кроку у розв’язанні випливає тригер з відомостями про те, що помилку знайдено правильно, і з’являється кнопка «Переглянути правильне розв’язання» і перейти до наступної вправи. У протилежному випадку програма надає корекцію і повертає до вибору кроків розв’язання.
На основі різного роду ППЗ, що рекомендуються для організації навчання математики у ВТНЗ створюються різноманітні електронні підручники та комп’ютерні навчальні комплекси. У системі навчання на засадах діяльнісного підходу найбільш доцільними, на наш погляд, є комп’ютерний навчальний комплекс «1С: Вища школа. Лінійна алгебра і аналітична геометрія». Доцільним також буде використання електронних підручників «Вища математика для майбутніх інженерів», розробленого К. В. Власенко [1] і «Курс лекцій. Вища математика», розробниками якого є П. О. Стеблянко, Т. В. Крилова, І. О. Давидов [10], та ін.
Ці програмні засоби дозволяють студентам освоїти прийоми розв’язування задач з різних розділів курсу вищої математики. Призначення їх у тому, щоб активізувати самостійну роботу студентів, допомогти неформальному засвоєнню предмета. Упровадження таких комп’ютерних комплексів сприяє принциповим змінам у структурі й змісті завдань для аудиторної і самостійної роботи, дає можливість регулярно контролювати вміння, підвищувати мотивацію студентів до навчання, створюючи умови поліпшення організації і збільшення ефективності самостійної аудиторної і домашньої роботи. Тому, викладачу при

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
105
проектуванні навчання математики на засадах діяльнісного підходу для майбутніх інженерів доцільно розробляти тематичне планування курсу з виокремленням тих ППЗ, які у найбільшій мірі уможливлюють організацію навчальної діяльності (табл. 1).
Таблиця 1
Застосування ППЗ до розділу “Лінійна алгебра”
Тема Назва педагогічного програмного засобу Системи лінійних алгебраїчних рівнянь
Програми зі складу «Евристико-дидактичних конструкцій»; «My test»; MS Power Poіnt; комп’ютерний навчальний комплекс «Лінійна алгебра й аналітична геометрія»; електронний методичний посібник «Вища математика для майбутніх інженерів»
Визначники п-го порядку
Програми зі складу «Евристико-дидактичних конструкцій»; «My test»; MS Power Poіnt; комп’ютерний навчальний комплекс «Лінійна алгебра й аналітична геометрія»; Excel; Derіve; електронний методичний посібник “Вища математика для майбутніх інженерів”
Алгебра матриць
Програми зі складу «Евристико-дидактичних конструкцій»; «My test»; MS Power Poіnt; комп’ютерний навчальний комплекс «Лінійна алгебра й аналітична геометрія»; ; Excel; Derіve; електронний методичний посібник «Вища математика для майбутніх інженерів»; MATCAD; «Програма для розв’язання визначника»
Комплексні числа
MS Power Poіnt; програми зі складу «Евристико-дидактичних конструкцій»; «My test»;MS Power Poіnt; комп’ютерний навчальний комплекс «Лінійна алгебра й аналітична геометрія»; електронний методичний посібник «Вища математика для майбутніх інженерів»
Многочлени від одного невідомого
Програми зі складу “«Евристико-дидактичних конструкцій»; «My test»;MS Power Poіnt; комп’ютерний навчальний комплекс «Лінійна алгебра й аналітична геометрія»; Excel; Derіve; електронний методичний посібник «Вища математика для майбутніх інженерів»; MATCAD; «Програма для розв’язання визначника»
Лінійні простори
MS Power Poіnt; програми зі складу «Евристико-дидактичних онструкцій»; «My test»; MS Power Poіnt; комп’ютерний навчальний комплекс «Лінійна алгебра й аналітична геометрія»; електронний методичний посібник «Вища математика для майбутніх інженерів»
Евклідові простори.
Програми зі складу «Евристико-дидактичних конструкцій»; «My test»; MS Power Poіnt; комп’ютерний навчальний комплекс «Лінійна алгебра й аналітична геометрія»; Excel; Derіve; електронний методичний посібник «Вища математика для майбутніх інженерів»; MATCAD; «Програма для розв’язання визначника».
Квадратичні форми.
Програми зі складу «Евристико-дидактичних конструкцій»; «My test»; MS Power Poіnt; комп’ютерний навчальний комплекс «Лінійна алгебра й аналітична геометрія»; Excel; Derіve; електронний методичний посібник «Вища математика для майбутніх інженерів»; MATCAD; «Програма для розв’язання визначника».
Лінійні оператори
MS Power Poіnt; програми зі складу «Евристико-дидактичних конструкцій»; «My test»; MS Power Poіnt; комп’ютерний навчальний комплекс «Лінійна алгебра й аналітична геометрія»; електронний методичний посібник «Вища математика для майбутніх інженерів».
Навчальний матеріал, який міститься у комп’ютерних комплексах з вищої математики
для майбутніх інженерів допомагає викладачеві змінювати структуру лекцій, модернізувати практичні заняття, моделювати евристичні бесіди, організовувати проблемні ситуації тощо.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
106
В той же час, проектування навчання як створення узгодженого, послідовного комплексу навчальних матеріалів, які дозволяють здійснювати організацію навчальної діяльності з математики, як на аудиторних заняттях, так і самостійної роботи студентів ці комплекси забезпечити не в змозі.
Особливе значення у навчанні математики на засадах діяльнісного підходу мають засоби проектування навчання, серед яких особливе місце займають предметна модель студента програмний засіб «Автоматизоване робоче місце викладача математики у ВТНЗ» [2] (рис.1).
Рисунок 1 - Головна сторінка інтерфейсу програми «Aвтоматизоване робоче місце викладача математики»
Включення до змісту навчання математики системи навчальних дій, що задана характером
майбутньої професійної діяльності і тільки тих знань, що забезпечують виконання цих дій, дало змогу оптимізувати змістову частину навчальної діяльності. Враховуючи, що засвоювати знання можна, тільки застосовуючи їх, оперуючи ними в перебігу навчальної діяльності, а механізмом здійснення навчальної діяльності при навчанні математики є розв’язання задач, доцільним є включення до засобів навчання системи задач, що спрямована на послідовне формування вмінь. Крім того, введення у навчальну діяльність з математичних дисциплін діяльність з розв’язування задач за допомогою процедури орієнтування, дає змогу сформувати у студентів повну орієнтувальну основу діяльності, що сприяє освоєнню математичних дій.
Розробка п’ятикомпонентної предметної моделі студента технічного університету з вищої математики, яка складається з тематичного, семантичного, функціонального, процедурного і операційного компонентів, дає змогу поповнити засоби навчання потужним інструментом. Всі компоненти цієї моделі, а особливо її семантичний компонент, який подається у вигляді семантичного конспекту, є засобами проектування й організації навчання математики [3].
Призначення програми «Автоматизоване робоче місце викладача математики у ВТНЗ» полягає у наданні викладачу математичних дисциплін у ВТНЗ можливості здійснювати науково-обґрунтоване проектування навчальної діяльності з математики.
ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
107
Мета комп’ютерно-орієнтованої системи «Автоматизоване робоче місце викладача математики у ВТНЗ» полягає у проектуванні різноманітних етапів навчання математики на засадах діяльнісного підходу для кожного напряму підготовки бакалаврів вищих технічних закладів.
Зупинімося на основних характеристиках програми. До структури програми входять: – перелік галузей знань; – розділи і теми курсу вищої математики; – предметна модель студента як основа для проектування діяльнісно-орієнтованої
технології навчання; – види навчальної діяльності, які можливо спроектувати для організації навчального
процесу. На прикладі теми “Алгебра матриць” опишемо роботу викладача з програмою з
проектування навчальної діяльності на лекції. Перше, що треба зробити викладачу при роботі з програмою, це обрати галузь знань,
для якої буде проводитися проектування навчання. Обравши напрям підготовки, необхідно визначитися з розділом і темою курсу вища
математика, для яких буде проводитися проектування. Після того, як обрана тема, необхідно визначитися з видом проектування діяльності для проектування:
– начальної діяльності на лекціях; – начальної діяльності на практичних заняттях; – самостійної науково-дослідної роботи студентів; – контролю результатів навчальної діяльності. У будь який момент роботи з програмою можна, нажавши кнопку “Help”, отримати
інформацію про предметну модель студента, на якій базується технологія проектування навчання.
– проектуючи, наприклад, навальну діяльність на лекції, можна скласти: – цілі лекції; – план лекції; – опорний конспект лекції; – набор тестових завдань з теорії для експрес контролю; – завдання евристичного характеру; – завдання для самостійної роботи для опанування матеріалу лекції; – приклади для опорного конспекту лекції; – професійно-спрямовані завдання за темою лекції.
Для практичного заняття може бути запроектовано його цілі, план, системи завдань для розв’язування в аудиторії, системи завдань для самостійного розв’язування, набору тестових завдань практичного характеру для експрес контролю, індивідуальних домашніх завдань.
При проектуванні самостійної науково-дослідницької роботи студентів викладач може обрати вид самостійної роботи, її цілі, план, тематику, сформувати правила оформлення результатів роботи і список рекомендованої літератури. Ще одним видом проектування є проектування контролю результатів навчальної діяльності. Воно передбачає вибір цілей контролю, структури білету, набору тестових завдань з теорії, практичних завдань білету.
Проектування багатьох видів діяльності відбувається на основі компонентів предметної моделі студента. Так, для проектування цілей лекції, або практичного заняття використовується операційний компонент предметної моделі студента, який містить опис математичних навчальних дій, що мають бути освоєні. Для визначення плану лекції або практичного заняття буде у нагоді тематичний компонент, а опорний конспект лекції формується за допомогою семантичного компоненту предметної моделі студента.
У програмі міститься велика база задач теоретичного і практичного характеру, які дозволяють формувати різноманітні системи завдань, як для аудиторної, так і для

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
108
самостійної роботи студентів. Всі задачі пов’язані з операційним компонентом предметної моделі студента, за допомогою якого встановлюється спектр дій задачі. А оскільки кожна математична предметна дія, що описана у операційному компоненті має зв’язки з функціональним компонентом, а через нього з семантичним компонентом, то автоматично встановлюється і спектр знань задачі.
Результатом роботи викладача з комп’ютерно-орієнтованою системою “Автомати-зоване робоче місце викладача математики у ВТНЗ” є розробка комплексу навчально-методичних матеріалів, необхідних для проведення лекційних або практичних занять, організації самостійної роботи студентів, або проведення контрольних заходів.
Програма може бути рекомендована викладачам математики вищих технічних навчальних закладів, студентам магістратури, а також науковцям та аспірантам галузі теорії та методики навчання математики у вищій школі.
Висновки Розглянуто компю‘терно-орієнтовані засоби навчання математики у технічному
університеті. Більшість з розглянутих засобів призначено для організації як навчальної діяльності на аудиторних заняттях, так і для самостійної роботи студентів. Для проектування навчання необхідна розробка спеціальних програмних засобів, які дозволять створювати повний комплекс навчально-методичних матеріалів, необхідних для організації навчання. Запропоновано авторський програмний засіб «Автоматизоване робоче місце викладача математики у ВТНЗ». Особливістю технології проектування навчання, що реалізується у розробленій програмі, є використання п‘ятикомпонентної предметної моделі студента, яка уможливлює створення навчально-методичних матеріалів, спрямованих на покрокове опанування навчальними діями. Перевагами таких навчально-методичних матеріалів є їх варіативність, повнота спектру знань і вмінь побудованих систем завдань, можливість використання евристичних, професійно-спрямованих, особистісно-орієнтованих, диференційованих систем завдань у навчанні на засадах діяльнісного підходу.
Список використаної літератури 1. Власенко К. В. Вища математика: елементи лінійної і векторної алгебри: електрон. навч.-метод.
посіб. для студ. техн. ВНЗ [Електронний ресурс] / К. В. Власенко. – 1,28 Гб. – Краматорськ, ДДМА, 2010. – 1 електрон. опт. диск (DVD–ROM) ; 12 см. – Систем. вимоги : Pentium ; 32 Mb RAM ; Windows XP ; Internet Explorer 7, Sun Java, Adobe Flash Player. – Назва з контейнера.
2. Євсеєва О. Г. Автоматизоване робоче місце викладача математики у ВТНЗ: комп’ютерно-орієнтована система [Електронний ресурс] / О. Г. Євсеєва. – 1,28 Гб. – Донецьк, ДонНТУ, 2012. – 1 електрон. опт. диск (DVD–ROM); 12 см. – Систем. вимоги: Pentium ; 32 Mb RAM ; Windows XP ; Internet Explorer 7, Sun Java, Adobe Flash Player. – Назва з контейнера.
3. Євсеєва О. Г. Теоретико-методичні основи діяльнісного підходу до навчання математики студентів вищих технічних закладів освіти: монографія / О. Г. Євсеєва. – Донецьк: ДонНТУ, 2012. – 455 с.
4. Жалдак М. І. Комп’ютер на уроках геометрії / М. І. Жалдак, О. В. Вітюк. – К.: РННЦ „ДІНІТ”, 2004. – 154 с.
5. Леонтьев А. Н. Деятельность. Сознание. Личность / А. Н. Леонтьев. – М.: Политиздат, 1977. – 304 с.
6. Раков С. А. Компьютерные эксперименты в геометрии / С. А. Раков, В. П. Горох.– Харьков: РЦНИТ, 1996. – 176 с.
7. Скафа О. І. Комп’ютерно-орієнтовані уроки в системі евристичного навчання математики / О. І. Скафа, О. В. Тутова. – Донецьк: Ноулідж, 2009. – 320 с.
8. Співаковський О. В. Теоретико–методичні основи навчання вищої математики майбутніх вчителів математики з використанням інформаційних технологій : автореф. дис. на здобуття

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
109
наук. ступеня доктора пед. наук: 13.00.02 «Теорія та методика навчання (математика)» / О. В. Співаковський. – К., 2004. – 42 с.
9. Средства обучения математике: сб. статей / сост. А. М. Пышкало. – М.: Просвещение, 1980. – 208 с.
10. Стеблянко П. О. Курс лекцій. Вища математика. Електронний підручник / П. О. Стеблянко, Т. В. Крилова, І. О. Давидов. – Україна, МОН України, Державний департамент інтелектуальної власності, 2005. – 708 с.
References 1. Vlasenko К. V. (2010), Vischa matematika : еlеmеnti lіnіynoyi і vеktоrnоyi аlgеbri : elektron. navch.-
metod. posib. dlya stud. tehn. VNZ – 1,28 Гb. – Kramatorsk, DDМА. – 1 elektron. оpt. disk (DVD–ROM) ; 12 sm. – System. vimogi : Pentium ; 32 Mb RAM ; Windows XP ; Internet Explorer 7, Sun Java, Adobe Flash Player.
2. Yevsyeyeva O. G. (2012), Avtomatizovane roboche mistce vikladacha matematiki u VTNZ : kompyuterno-оrientovana systema– 1,28 Гб. – Donetsk, DonNTU, 2012. – 1 elektron. оpt. disk (DVD–ROM) ; 12 sm. – System. vimogi : Pentium ; 32 Mb RAM ; Windows XP ; Internet Explorer 7, Sun Java, Adobe Flash Player.
3. Yevsyeyeva O. G. (2012), Теоrеtikо–metodіchni оsnovi diyalynisnogo pidhodu dо navchаnnya matematiki studentiv vischih tehnichnih zakladiv osviti : monografiya. – Donetsk, DоnNTU.
4. Zhaldak М. І., Vityuk O. V. (2004), Kompyuter nа urokah geometrii. – Кiyiv, RNNC „DІNІТ”. 5. Lеоntyev А. N. (1977), Deyatelynost. Soznaniye. Lichnost. – Мoskva, Politizdat. 6. Rakov С. А., Goroh V. P. (1996), Kompyuternie experimenti v geometrii.– Harkov, RCNIТ. 7. Skafa О. І., Tutova O. V. (2009), Kompyuterno-оrіentovani uroki v sistemi еvristichnogo navchаnnya matematiki. – Donetsk,
Nоulidzh. 8. Spivakovskiy О. V. (2004), Теоrеtikо–metodіchni оsnovi navchаnnya vischoyi matematiki maybutnih vchiteliv matematiki z
vikoristannyam іnformaciynih tehnologiy : avtoref. dis. nа zdobuttya nauk. stupenya doktorа ped. nauk : 13.00.02 «Teoriya tа metodikа navchаnnya (matematikа)». – Кiyiv.
9. Pishkalo А. М. (1980), Sredstva оbucheniya matematike: sb. statey. – Мoskva, Prosvescheniye. 10. Steblyanko P. О., Krilova T. V., Davidof I. O. (2005), Кurs lеkciy. Vischa matematika.
Elektronniy pіdruchnik.– Ukraine, МОN, Derzhavniy departament intelektualynoyi vlasnosty.
Надійшла до редакції: Рецензент: 02.04.2014 д-р техн. наук, проф. Улітін Г.М.
Е. Г. Евсеева ГУВЗ «Донецкий национальный технический университет» Использование компьютерно-ориентированных средств проектирования и организации обучения математике на основе деятельностного подхода в техническом университете. Рассмотрены компьютерно-ориентированные средства обучения математике в техническом университете на основе деятельностного подхода. Предложено авторское программное средство «Автоматизированное рабочее место преподавателя математики во ВТУЗ». Особенностью технологии проектирования обучения, которая реализуется в разработанной программе, является использование пятикомпонентной предметной модели студента, которая делает возможным создание учебно-методических материалов, направленных на пошаговое овладение учебными действиями. Ключевые слова: обучение математике, деятельностный подход, компьютерно-ориентированные средства обучения, автоматизированное рабочее место преподавателя математики.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
110
E. G. Yevsyeyeva Donetsk National Technical University The use of computer-oriented design and training tools for mathematics teaching on the basis of the activity approach at a technical university. In connection with the trend of wide application of information-communication technologies in the training process the concept of information-communication technologies of training is considered. This concept is treated as a system of general pedagogical, psychological and didactical procedures of interaction of teachers and students with the use of technical resources, which aims to implement the content, methods, forms and means of training, adequate to the aims of education, the individual needs of students and the requirements to the formation of information competences. The necessity of using information-communication technologies of teaching is demonstrated. The computer-oriented tools for teaching mathematics on the basis of the activity approach at a technical university are considered. The software “Automated workplace of a mathematics teacher at a technical university” is proposed. The feature of the implemented in the program technology of training designing is the use of five components, which make educational-metodical materials aimed at step-by-step mastering of educational action. The result of Professor's work with the program is the development of a set of teaching and methodical materials necessary for lectures or practical classes, organization of independent work of students. The advantages of such teaching materials are their variability, weight spectrum of knowledge and skills task systems, heuristic, professionally-designed, student-oriented, differentiated systems of tasks in training on the basis of activity approach. The program contains a large database of problems of theoretical and practical nature, which can generate a variety of challenges, both for the classroom or for self-study. The program can be recommended for teachers of mathematics of higher technical educational institutions, graduate students, and research staff and postgraduate students of theory and methodology of teaching mathematics in higher school. Keywords: mathematics, activity approach, computer-oriented teaching tools, automated workplace of a mathematics teacher.
Евсеева Елена Геннадиевна, Украина, закончила Донецкий государственный университет, доктор пед. наук, доцент, профессор кафедры высшей математики ГВУЗ «Донецкий национальный технический университет» (ул. Артема, 58, г. Донецк, 83001, Украина). Основное направление научной деятельности – методика обучения математике, деятельностный поход к обучению, оптимизация, идентификация гидрологических параметров открытых русел, вариационные задачи нестационарной гидродинамики.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
© Воропаєва В.Я., Жуковська Д.О., 2014 111
УДК 681.5.03
В.Я. Воропаєва (канд. техн. наук, доц.), Д.О. Жуковська ДВНЗ «Донецький національний технічний університет», м. Донецьк
кафедра автоматики і телекомунікацій e-mail: [email protected], Voropayeva@Donntu.еdu.ua
ОЦІНКА ВПЛИВУ АЛГОРИТМІВ ОБРОБКИ ЧЕРГ НА ПОКАЗНИКИ QOS
Вирішена задача розробки моделі алгоритму обробки пріоритетних черг з урахуванням факторів впливу методів управління смугою пропускання, методів визначення розмірів буфера пам'яті, методу оцінки сумарної затримки. Проведений аналіз існуючих алгоритмів обробки пріоритетних черг в комутаційному обладнанні. Описаний вибір засобу реалізації програмної моделі та середовища моделювання, планування експерименту, розробка та налаштування алгоритму моделі обробки пріоритетних черг. Проведенні експерименти з використанням імітаційного моделювання GPSS World та оцінка впливу різних алгоритмів на показники QoS. Ключові слова: модель, алгоритм, QoS, черга, пріоритет, GPSS World.
Загальна постановка проблеми При роботі IP-мережі з використанням різних алгоритмів обробка черг відсоток
втрачених пакетів становить чималу частину від усього переданого трафіку, оскільки обладнання не здатне обробити абсолютно всі пакети.
Отже, необхідно кожен раз при прийомі пакету робити вибір, приймати його на обробку або видалити з черги. Для здійснення даного вибору для кожного пакета необхідний один або кілька критеріїв, за якими буде здійснюватися вибір. Слід взяти до уваги технічну можливість комутаційного устаткування, тобто маршрутизаторів і комутаторів 2 і 3 рівня, оскільки від неї залежить продуктивність обробки трафіку [1].
Мета роботи – розробка моделі обробки черг в комутаційному обладнанні, оцінка продуктивності алгоритмів обробки черг та впливу моделей алгоритмів на показники Qos.
Постановка задач дослідження Для досягнення поставленної мети необхідне вирішення наступних задач: 1. Провести аналіз існуючих алгоритмів обробки черг в комутаційному обладнанні. 2. Сформувати вимоги до моделі обробки пріоритетних черг. 3. Розробити, реалізувати і експериментально перевірити модель обробки пріоритетних
черг. 4. Оцінити вплив даного алгоритму обробки черг на показники Qos методом
порівняння з іншими алгоритмами. Вирішення задач і результати досліджень Більшість сучасних маршрутизаторів мають вбудовані функції організації пріоритетних
черг, які дозволяють обслуговувати в першу чергу певні види трафіку. Метод пріоритетних черг найбільш часто використовується для надання часових гарантій чутливим до затримок сервісам. Даний метод може застосовуватися для передачі аудіо- та відеоінформації, коли не потрібна висока якість. Для доставки аудіо- та відеоінформації з високою якістю необхідно гарантувати низьку затримку і невеликий ефект тремтіння. Цього важко домогтися в мережах без значних накладних витрат при резервуванні буферного простору маршрутизаторів і без реалізації складних алгоритмів обробки черг [2]. Окремі частини методу описані в різних стандартах. Кожен виробник мережного устаткування реалізує в своїх виробах власні алгоритми обробки черг. Проаналізуємо основні з них.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
112
Алгоритм Drop Tail – задається максимальний розмір черги (в пакетах або в байтах), пакет, що знову прибув поміщається в кінець черги, а якщо черга вже повна – відкидається [3]. Алгоритм FIFO ( First In, First Out). Якщо маршрутизатор отримує пакети швидше, ніж він може відправити їх через даний порт, він поміщає пакети в чергу. Потім, в простому випадку, вони відправляються в порядку надходження, тобто реалізується принцип «першим прийшов, першим пішов». Алгоритм RED (Random Early Detection) – випадкове раннє виявлення. Метод дозволяє пом'якшити ефект від втрати пакетів навіть при дуже великих навантаженнях. Алгоритми пріоритетних черг – це алгоритми, при використані яких кілька черг FIFO або RED утворюють одну чергу. Трафік розподіляється між цими чергами у відповідності із заданим критерієм. При цьому трафік відправляється в порядку чіткої черговості: першим – трафік з високим пріоритетом, другим – з середнім і т. д.тЧерги на основі класів (Class-Based Queuing, CBQ) – це алгоритм, при якому трафік ділиться на декілька класів. Кожен клас має власну чергу і йому виділяється деяка частина пропускної здатності каналу. Зважена справедлива черга (Weighted Fair Queuing, WFQ) – окремий випадок CBQ, коли класам відповідають незалежні потоки. Кожному класу відповідає одна черга FIFO і їй відводиться деяка частина пропускної здатності каналу. При цьому відбувається перерозподіл пропускної здатності між потоками [4].
Для вирішення поставлених задач може використовуватися наступне обладнання – маршрутизатори та комутатори 2 і 3 рівня. У ролі маршрутизатора може виступати робоча станція або сервер, що мають кілька мережних інтерфейсів і забезпечені спеціальним програмним забезпеченням. Маршрутизатори верхнього класу – це, як правило, спеціалізовані пристрої, що поєднують в окремому корпусі безліч маршрутизуючих модулів [5].
Основою для моделі, що розробляється обрана модель «зважена справедлива черга» (WFQ), тому що її перевагою є міжплатформенність комутаційного обладнання 2-го і 3-го рівнів.
У багатьох мережних пристроях механізм WFQ є одним з основних для підтримки якості обслуговування. WFQ як узагальнення алгоритму чесних планувальників (Fair Queuing - FQ). Обидва планувальника мають окремі FIFO-черги для кожного потоку даних. Так, якщо канал зі швидкістю R використовується для N потоків, то швидкість обробки кожного з них буде R/N при використанні чесного планувальника. Чесний планувальник з пріоритетними коефіцієнтами дозволяє регулювати частку кожного потоку. Якщо є N активних потоків, з пріоритетами w1,w2,…wn, то i-й потік буде мати швидкість:
Ni wwwRwfrac ...21 (1) Кожному пакету, що надходить k
ip присвоюється віртуальний час початку kiS і кінця
обробки kiF , де k – номер пакета, а i –номер потоку. Час початку і кінця обчислюються за
такими формулами:
ikaVikFikS ,,,1max, , 0,0,,,, iFir
ikLikSikF (2, 3)
де ika , та ikL , – час приходу пакета та його довжина відповідно; tv – віртуальна функція часу, яка визначається за формулою:
jrSigmafracdt
tdV 1 (4)
де j – всі активні сесії. Під вагою пріоритетного класу розуміється відсоток наданої класу трафіку пропускної
здатності від повної пропускної здатності вихідного інтерфейсу. Як при зваженому, так і при пріоритетному обслуговуванні, трафік ділиться на кілька класів для кожного з яких ведеться окрема черга пакетів. Але з кожною чергою зв'язується не її пріоритет, а відсоток пропускної

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
113
здатності вихідного інтерфейсу, що гарантується даному класу трафіку при перевантаженнях цього інтерфейсу (рис 1).
Рисунок 1 – Зважені черги, що настроюються
Механізм пріоритетної обробки трафіку передбачає поділ всього мережного трафіку на
невелику кількість класів з призначенням кожному класу деякої числової ознаки – пріоритету. Поділ на класи (класифікація) може вироблятися різними способами. Пакети можуть розбиватися на класи за пріоритетами відповідно до типу мережного протоколу. Правила класифікації пакетів на пріоритетні класи є складовою частиною політики управління мережею, тому класом для проектованої моделі вважається тип змішаного трафіку (даних, транзакцій, реального часу) [7].
У моделі, що розробляється пакети приймаються з i-го порту, потім розбиваються на пріоритетні класи (високий, середній, низький) відповідно до типу мережного протоколу на підставі адрес призначення й джерела.
Вступивши в період перевантаження пакет поміщається в чергу згідно його пріоритетом. Черги обслуговуються послідовно і циклічно, і в кожному циклі з кожної черги забирається таке число байт, яке відповідає вазі черги. Пріоритети черг мають абсолютний характер переваги при обробці: поки з більш пріоритетною черги не будуть вибрані всі пакети, пристрій не переходить до обробки наступної, менш пріоритетної. Пакети з найвищим пріоритетом завжди отримують ту пропускну здатність, яка їм необхідна. Що ж до інших класів пріоритетів, то якість їх обслуговування нижче, ніж у пакетів з найвищим пріоритетом.
При перевантаженнях в маршрутизаторі недолік розміру черги призводить до необхідності відкидання пакетів. Пакет обробляється протягом певного часу, що задається системним годинником. Розпізнавання пріоритету, розміщення в одну з 3х черг і обробка виконується протягом заданого часу.
Для побудови даної моделі найбільше підходить мова моделювання GPSS, оскільки це засіб моделювання дозволяє організовувати роботу в реальному часі дискретно-стохастичних систем. Альтернативним варіантом могло б служити написання програми моделі мовою C++, але основною проблемою при цьому підході є завдання реального часу.
Суть методу статистичного моделювання зводиться до побудови для процесу функціонування досліджуваної системи S деякого моделюючого алгоритму, що імітує поведінку і взаємодію елементів системи з урахуванням випадкових вхідних впливів і впливів зовнішнього середовища Е, і реалізації цього алгоритму з використанням програмно-технічних засобів ЕОМ [8].
На рисунку 2 представлена Q-схема обслуговування проектованої моделі, для комутатора з процесорами портів введення/виведення і центральним процесором обробки комутації, де Г – генератор заявок, Qj – буфер j-го порту, ПРj – обробка процесором j-го

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
114
порту, Пр сорт – обробка пріоритетних черг, Пр ц – обробка пакета центральним процесором, Vl, Vc, Vh – визначення смуги пропускання для черг з високим пріоритетом, середнім і низьким.
Рисунок 2 – Q-схема обслуговування проектованої моделі
У мові GPSS World можливість завдання функцій розподілу випадкових величин
обмежена завданням їх у табличному вигляді шляхом апроксимації безперервними функціями. Тому можна задати тільки ті функції, які легко перетворити для нових значень параметрів. До таких функцій, наприклад, відноситься функція експоненціального розподілу з параметром λ = 1, а також функція стандартного нормального розподілу з математичним очікуванням m= 0 і стандартним відхиленням σ = 1.
Пуассонівський вхідний потік описується таким чином: імовірність надходження k заявок пуассонівського потоку протягом інтервалу t становить:
...3,2,1,!
kk
tetpkt
k
(5)
де λ – інтенсивність потоку. Інтервали часу між сусідніми заявками пуассонівського потоку розподілені за
експоненціальним законом [9]. Згідно з методом зворотної функції, можна отримати ряд чисел, які мають експоненційний розподіл, якщо ряд випадкових чисел R, рівномірно розподілених на інтервалі [0,1], перетворити відповідно до функції, зворотної до експоненційної функції розподілу:
jj rxFt ln11
, (6)
де jt – j-й розіграний інтервал часу надходження; 1 – середній інтервал часу надходження;
jr - j-е число в послідовності випадкових чисел R з рівномірним розподілом на інтервалі [0, 1].
Розробниками GPSS була здійснена апроксимація функції xF 1 , зворотної до експоненційної функції розподілу з параметром λ = 1. Таким чином, функція xF 1 була замінена 23 відрізками, які використовуються для перетворення значень RNj в значення -ln( RNj ).
Функція XPDIS визначає експоненціальне розподіл з інтенсивністю λ=1. Пуассонівський вхідний потік з інтенсивністю λ, відмінний від одиниці, моделюється за допомогою блоку GENERATE, таким чином: як операнд А використовують середнє значення інтервалів часу 1/λ, де λ – інтенсивність пуассонівського потоку; як операнд В використовують ВЧА – значення функції XPDIS, оператори визначення і опису якої наведені нижче.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
115
XPDIS FUNCTION RN1,C24 0,0/.100,.104/.2,.222/.300,.355/.400,.509/.500,.690/.600,.915/ .700,1.200.750,1.380/.800,1.600/.840,1.830/.880,2.120/.900,2.30/.920,2.520/.940,2.810.950,2.990/.960,3.200/.970,3.500/.980,3.90/.990,4.600/.995,5.300/.998,6.200.999,7/1,8
При імітаційному моделюванні виділяють три подання часу: реальне, модельне (системне) і машинний час. Система моделювання GPSS заснована на переході вимог (транзактів) від блоку до блоку (від оператора до оператора) у визначені моменти часу. Вихідними параметрами є величини, що характеризують властивості системи – якість її функціонування: коефіцієнти використання каналів обслуговування; максимальна і середня довжина черг в системі; час знаходження вимог у чергах і каналах обслуговування [10].
Модель включає наступні GPSS-блоки: Створення транзактів: Generate // вхід транзактів в модель; Вхід транзактів у чергу: Queue Joeqv // транзакти займають чергу ВП; Queue Joeqs // транзакти займають чергу СП; Queue Joeqn // транзакти займають чергу НП; Зайняття пристрою: Seize Joe // транзакти займають пристрій; Вихід транзактів з черги: Depart Joeqv // транзакти звільняють чергу ВП; Depart Joeqs // транзакти звільняють чергу СП; Depart Joeqn // транзакти звільняють чергу НП; Затримка транзактів на обслуговуванні: Advance // обслуговування транзакта; Звільнення пристрою: Release Joe // транзакти звільняють пристрій; Знищення транзактів: Terminate // транзакти залишають модель; В якості транзактів імітуються пакети.
Використовується модель з організацією 3-х черг: високого, середнього та низького пріоритетів. В якості пристрою, що обробляє пакети, виступає трьох-канальний комутатор третього рівня. Вхідні дані моделювання: середній інтервал між пакетами даних – 25 од. часу; ємність накопичувачів –20; час передачі пакету даних – 20 од. часу; час передачі підтвердження – 1 од. часу; час обробки пакету в ЦП – 2 од. часу.
Ціль моделювання: оцінка продуктивності алгоритму обробки пріоритетних черг. Для визначення діапазонів врахованих факторів слід провести ряд експериментів.
Експеримент 1. Максимальна інтенсивність вхідного високопріоритетного трафіку, при середній інтенсивності середньопріоритетного і низькопріоритетного трафіку. Експеримент 2: Середня інтенсивність вхідного високопріоритетного трафіку, при середній інтенсивності середньопріоритетного і низькопріоритетного трафіку. Експеримент 3: Максимальна інтенсивність вхідного середньопріоритетного трафіку, при середній інтенсивності високопріоритетного і низькопріоритетного трафіків. На ряду з описаними експериментами в роботі були проведені експерименти для інших алгоритмів обробки черг в комутаційному обладнанні, а саме, Drop Tail та CBQ. Результати моделювання приведені у вигляді гістограми, де вказана кількість пакетів, що не отримали обслуговування (рис. 3), де В – трафік високого пріоритету, С – середнього і Н – низького.
Рисунок 3 – Результати моделювання алгоритмів в середовищі GPSS World

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
116
З рисунка видно, що при використанні алгоритму Drop Tail кількість пакетів, які не отримали обслуговування, становить 162. Для алгоритму CBQ (розподілення пропускної здатності в відсотках) маємо: при відведені 50% пропускної здатності на першу чергу та по 25% на другу і третю втрати становлять 18 пакетів, при відведені 50% для другої черги та по 25% для першої і третьої – 44 пакети, якщо призначити 50% для третьої та по 25% для першої і другої – 36 пакетів. Найкращий результат показав алгоритм пріоритетних черг: при максимальній інтенсивності вхідного високопріоритетного та середній інтенсивності середньопріоритетного і низькопріоритетного трафіку не обслугованими лишилось 14 пакетів, при середній інтенсивності вхідного високопріоритетного, середньопріоритетного і низькопріоритетного трафіку – 37 пакетів, при максимальній інтенсивності вхідного середньопріоритетного та середній інтенсивності високопріоритетного і низькопріоритетного трафіків – 24 пакети.
Висновки 1. Проведений аналіз існуючих алгоритмів обробки черг в комутаційному обладнанні. 2. Розроблена модель обробки пріоритетних черг, яка була реалізована за допомогою
імітаційного моделювання в середовищі GPSS World. 3. Шляхом проведення різних експериментів визначено, що використання алгоритму
пріоритетних черг дає змогу зменшити втрати важливої інформації, що чутлива до затримок. Цим самим доведено, що даний алгоритм значно підвищує показники якості при передачі аудіо- та відеоінформації.
Список використаної літератури 1. Моделирование и синтез оптимальной структуры сети Ethernet / А.В. Благодаров, А.Н.
Пылькин, Д.М. Скуднев, А.П. Шибанов. – М.: Издательство "Гор. линия-Телеком", 2011. - 112 с.
2. Алексеев Е.Б. Проектирование и техническая эксплуатация цифровых телекоммуникационных систем и сетей / Е.Б. Алексеев, В.Н. Гордиенко, В.В. Крухмалев; под ред. В.Н. Гордиенко и М.С. Тверецкого. - [2-е изд., испр.]. – М.: Издательство "Горячая линия-Телеком", 2012. - 392 с.
3. Ashish Kumar , Ajay K Sharma , Arun Singh Comparison and Analysis of Drop Tail and RED Queuing Methodology in PIM-DM Multicasting Network [Електронний ресурс]. – Режим доступу: http://www.ijcsit.com/docs/Volume%203/Vol3Issue2/ijcsit20120302108.pdf.
4. Демидов А.С. Анализ динамики загруженности корневых маршрутизаторов информационных систем при внедрении мультимедийных услуг / А.С. Демидов, А.В. Косиор, В.Я. Воропаева // ІV міжнародна науково-технічна конференція «Проблеми телекомунікацій»: збірник тез, (м. Київ, 20 – 23 квітня 2010 р.). - К.: НТУУ «КПІ», 2010. С. 141.
5. Фролов А.В. Локальные сети персональных компьютеров: монтаж сети, установка программного обеспечения / А.В. Фролов, Г.В. Фролов. – [3-е изд., стер.]. – М.: Диалог-мифи, 2011. - 169 с.
6. Корячко В. П. Корпоративные сети: технологии, протоколы, алгоритмы / В. П. Корячко, Д. А. Перепелкин. – М.: Издательство "Горячая линия-Телеком", 2011. - 216 с.
7. Воропаева В.Я. Исследование характеристик фрактальных процессов потоков данных мультисервисных сетей / В.Я. Воропаева, Е.В. Жалейко // Наукові праці Донецького національного технічного університету. Серія: Обчислювальна техніка та автоматизація. – 2011. - Випуск 21 (183). – 2012. - С. 77 – 81.
8. Шрайбер Т. Дж. Моделирование на GPSS / Т. Дж. Шрайбер; пер. с англ. В. И. Гаргера, И. Л. Шмуйловича; под ред. М. А. Файнберг. - М.: Машиностроение, 1980. - 592 с.
9. Теорія телетрафіку: навч. посіб. / В.Я. Воропаєва, В.І. Бессараб, В.В. Турупалов, В.В. Червинський. – Донецьк: ДВНЗ «ДонНТУ», 2011. – 202 с.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
117
10. Кудрявцев Е. М. GPSS World. Основы имитационного моделирования различных систем / Е. М. Кудрявцев. – М.: ДМК Пресс, 2004. – 320 с.
References 1. Blagodarov, A.V., Pyl'kin, A.N. and Skudnev, D.M., Shibanov, A.P. (2011), Modelirovanie i
sintez optimal'noj struktury seti Ethernet [Modeling and synthesis of the optimal structure of an Ethernet network], Gorjachaja linija-Telekom, Moscow, Russia.
2. Alekseev, E.B., Gordienko, V.N. and Kruhmalev, V.V. (2012), Proektirovanie i tehnicheskaja jekspluatacija cifrovyh telekommunikacionnyh sistem i setej [Design and technical maintenance of digital telecommunication systems and networks], in Gordienko, V.N., Tvereckogo, M.S. (ed.), 2nd ed., Gorjachaja linija-Telekom, Moscow, Russia.
3. Ashish Kumar, Ajay K Sharma and Arun Singh (2012) “Comparison and Analysis of Drop Tail and RED Queuing Methodology in PIM-DM Multicasting Network”, available at: http://www.ijcsit.com/docs/Volume%203/Vol3Issue2/ijcsit20120302108.pdf. (Accessed 25 March 2014).
4. Demidov, A.S., Kosior, A.V. and Voropaeva, V.Y. (2010), “Analysis of the dynamics of core routers utilization of information systems in the implementation of multimedia services”, Zbіrnik tez. K.: NTUU “KPІ” [Abstracts. K.: NTU "KPI"], ІV mіzhnarodna naukovo-tehnіchna konferencіja “Problemi telekomunіkacіj” [IV International Scientific Conference "Problems of Telecommunications"], Kiev, Ukraine, 2010, p. 141.
5. Frolov, A.V. and Frolov, G.V. (2011), Lokal'nye seti personal'nyh komp'juterov: Montazh seti, ustanovka programmnogo obespechenija [Networks of personal computers: Installing network, software installation], 3nd ed., Dialog-mifi, Moscow, Russia.
6. Korjachko, V.P. and Perepelkin, D.A. (2011), Korporativnye seti: tehnologii, protokoly, algoritmy [Corporate networks: technology, protocols, algorithms], Gorjachaja linija-Telekom, Moscow, Russia.
7. Voropaeva, V.Y. and Zhalejko, E.V. (2011), “Investigation of the characteristics of fractal processes data streams multiservice networks”, Naukovі pracі Donec'kogo nacіonal'nogo tehnіchnogo unіversitetu. Serіja: Obchisljuval'na tehnіka ta avtomatizacіja, no. 21 (183), pp. 77-81.
8. Shrajber, T.Dzh.(1980), Modelirovanie na GPSS [GPSS simulation], Translated by Gargera, V.I., Shmujlovicha, I.L., in Fajnberg, M.A. (ed.), Mashinostroenie, Moscow, Russia.
9. Voropayeva, V.Y. (2011), Teoriya teletrafiku: navch. posib., [Teletraffic theory: a tutorial], № 1/11-7538, in Voropayeva, V.Y., Bessarab, V.I., Turupalov, V.V., Chervyns'kyy, V.V. (ed.), DVNZ “DonNTU”, Donets'k, Ukraine.
10. Kudrjavcev, E.M. (2004), GPSS World. Osnovy imitacionnogo modelirovanija razlichnyh system [GPSS World. Fundamentals of simulation of different systems], DMK Press, Moscow, Russia.
Надійшла до редакції: Рецензент: 11.04.2014 канд. техн. наук, проф. Маренич К.М.
В.Я. Воропаева, Д.А. Жуковская ГВУЗ «Донецкий национальный технический университет» Оценка влияния алгоритмов обработки очередей на показатели Qos. Решена задача разработки модели алгоритма обработки приоритетных очередей с учетом факторов влияния методов управления полосой пропускания, методов определения размеров буфера памяти, метода оценки суммарной задержки. Проведен анализ существующих алгоритмов обработки приоритетных очередей в коммутационном оборудовании. Описан выбор

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
118
средства реализации программной модели и среды моделирования, планирования эксперимента, разработка и настройка алгоритма модели обработки приоритетных очередей. Проведены эксперименты с использованием имитационного моделирования GPSS World и оценено влияния различных алгоритмов на показатели QoS. Ключевые слова: модель, алгоритм, QoS, очередь, приоритет, GPSS World.
V.Y. Voropaeva, D.A. Zhukovskaya Donetsk National Technical University Assessing the impact of queue processing algorithms on indicators QoS. In a computer network using different technologies the percentage of lost packets is a large part of the total data traffic as the equipment is not capable to handle all packages. Therefore, each time a packet is received it is necessary to make a choice whether to accept it on processing or remove from the queue. To implement this choice each packet must have one or more criteria, on which the choice will be carried out. Also it is necessary to take into consideration technical possibility of the switching equipment, i.e. routers and switchboards 2 and 3 levels as performance of processing of the traffic depends on it. The job purpose is the development of model of processing queues in the switching equipment, performance evaluation of algorithms of processing queues and influence models of algorithms on the QoS. Most modern routers have built-in organization priority queues, which enable them to serve in the first place certain types of traffic. Priority queues method is most often used to provide temporary guarantees for delay-sensitive applications. For transmitting audio and video with high quality it is necessary to ensure low delay and low jitter effect. This is difficult in networks without significant overhead to reserve buffer space routers and without the implementation of complex algorithms for processing queues. We developed the model of algorithm processing priority queues considering factors of the influence of methods of bandwidth management, methods for determining the size of the memory buffer, the method of estimation the total delay. The analysis of existing algorithms for priority queues in the switching equipment is carried out. The choice of an implementer of program model and the environment of modelling, experiment planning, working out and adjustment of algorithm of model of processing of priority queues is described. Experiments were carried out using simulation GPSS World and the influenceof various algorithms on QoS was estimated. Keywords: model, algorithm, QoS, queue, priority, GPSS World.
Воропаєва Вікторія Яківна, Україна, закінчила Донецький національний технічний університет, канд. техн. наук, доцент, професор кафедри автоматики та телекомунікацій ДВНЗ «Донецький національний технічний університет» (вул. Артема, 58, м. Донецк, 83001, Україна). Основний напрямок наукової діяльності – сучасна теорія телетрафіку, оптимізація телекомунікаційних та інформаційно-комунікаційних систем та мереж.
Жуковська Дар’я Олександрівна, Україна, магістр кафедри автоматики і телекомунікацій ДВНЗ «Донецький національній технічний університет» (вул. Артема, 58, м. Донецьк, 83001, Україна). Основний напрямок наукової діяльності – оптимальне управління трафіком в гібридних телекомунікаційних мережах.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
© Воропаева В.Я., Кабакчей В.И., 2014 119
УДК 621.396
В.Я. Воропаева (канд. техн. наук, доц.), В.И. Кабакчей ГВУЗ «Донецкий национальный технический университет», г. Донецк
кафедра автоматики и телекоммуникаций e-mail: [email protected], [email protected]
ВЫБОР МЕТОДОВ ОЦЕНКИ КОЛИЧЕСТВА МЕТОК В РАБОЧЕЙ ЗОНЕ RFID-РИДЕРА ДЛЯ ДОСТИЖЕНИЯ МАКСИМАЛЬНОЙ ПРОПУСКНОЙ СПОСОБНОСТИ
Проведен сравнительный анализ антиколлизионных алгоритмов с целью достижения максимальной пропускной способности системы радиочастотной идентификации. Выбран метод, который позволяет увеличить среднюю пропускную способность RFID-системы и повысить точность оценки количества неидентифицированных меток. Результаты моделирования показывают, что данный алгоритм может также уменьшить общее количество слотов, используемых для идентификации меток, и увеличить скорость их идентификации. Ключевые слова: RFID-метка, антиколлизионный алгоритм, считыватель, радиочастотная идентификация.
Общая постановка проблемы В последние годы технология радиочастотной идентификации (Radio Frequency
IDentification – RFID) стала быстро развивающейся бесконтактной технологией автоматической идентификации. Типичная система RFID состоит из меток, считывателя (ридера), а также программного обеспечения для обработки данных [1]. У каждой метки есть свой уникальный идентификатор (UID), который фиксируется в ней на стадии производства [2]. Каждый UID будет передан считывателю автоматически, когда метка окажется в его рабочей зоне. После этого процесс коммуникации между меткой и ридером заканчивается. Тем не менее, во многих приложениях, например, на складах, в супермаркетах или платных автодорогах, большое количество меток может одновременно находиться в рабочей зоне считывателя. Когда две или более меток обращаются к ридеру одновременно, их сигналы интерферируют друг с другом и считыватель обнаруживает коллизию. Коллизия резко снижает эффективность идентификации системы RFID. Поэтому одной из важнейших задач для RFID-систем является максимизация скорости идентификации метки при сохранении низкой вычислительной сложности.
Для решения этой задачи используются различные алгоритмы, одним из которых является динамический алгоритм ALOHA (DFSA). Благодаря своей высокой пропускной способности в условиях большой нагрузки он широко применяется в системе RFID для уменьшения коллизий во время процесса коммуникации между метками и ридером[ 3]. Он регулирует размер параметра (число слотов, доступных для меток) динамически в соответствии с оценкой количества не идентифицированных меток, за счет чего достигается относительно высокая пропускная способность. Максимальная пропускная способность системы RFID может быть достигнута, когда число слотов, доступных для меток, равно числу не идентифицированных меток [4]. Таким образом, возникает задача точного определения количества меток, находящихся в рабочей зоне считывателя.
Решение задачи и результаты исследований Предположим, что имеется n не идентифицированных меток и параметр содержит N
слотов, и что каждая метка случайным образом выбирает слот параметра с вероятностью 1/N. Вероятность того, что k меток одновременно передадут информацию в один слот:

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
120
.111)(knk
NNkn
kP
(1)
Из выражения (1) вероятность того, что метки идентифицируются после одного цикла
передачи параметра, может быть получена следующим образом:
.111
1111
)1(*111
nn
Nn
NNn
NPN (2)
В целом, пропускная способность RFID-системы с N слотами и nидент
идентифицированными метками определяется:
.1111
)1(),(11
nидент
NNn
PN
nNnT (3)
Максимальная пропускная способность достигается при ∂T/∂N=0. В соответствии с (2)
и (3), это условие может быть выражено как:
.
1ln
1
NN
n (4)
На практике длина параметра всегда больше, чем 1. Поэтому когда N » 1, из (4)
получаем n ≈ N. Соответственно, максимальная пропускная способность может быть вычислена из формулы (3).
Методы оценивания количества меток, находящихся в рабочей зоне считывателя Существующие методы оценивания количества меток, находящихся в рабочей зоне
считывателя, базируются на различных алгоритмах. Алгоритм Вогта. Вогт представил схему оценивания количества меток,
минимизирующую ошибку между имеющимся числом пустых, однократно занятых, слотов, в которых произошла коллизия и их ожидаемым значением[5].
В уравнении оценивания (1) 210 ,, aaa являются ожидаемым количеством пустых, успешных и слотов с коллизией в параметре, а значения E, S, C - количеством пустых, успешных и слотов с коллизией после очередного цикла чтения. Значение n, которое минимизирует расстояние между двумя векторами, будет оценкой количества не идентифицированных меток.
.
min2
1
0
CSE
aaa
(5)
Алгоритм Шута. Предполагая, что пропускная способность достигнет максимума
ожидаемое количество меток, содержащихся в каждом слоте с коллизией можно рассчитать по формуле (6). Ps и Pc – это вероятность успешной идентификации и коллизии в одном слоте соответственно. Количество меток оценивается как S + 2,39C [6].

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
121
.3922.21
lim1
c
sn
rateметок P
PC
C (6)
Результаты моделирования Моделирование проводилось с целью изучения эффективности исследуемых
алгоритмов. Начальная длина кадра была установлена 70 слотов. Метки, в количестве от 10 до 100, 1000 раз были введены в зону опроса считывателя, а затем был выполнен алгоритм.
Пусть общN - общее количество слотов для полной идентификации меток, тогда средняя пропускная способность RFID системы определяется по (7):
.общ
ср NnT (7)
Как видно из рисунка 1, когда количество меток ниже 50, средняя пропускная
способность алгоритма Шута близка к пропускной способности алгоритма Вогта.
Рисунок 1 – Зависимость средней пропускной способности от количества меток
Но, когда количество меток превышает 50, алгоритм Вогта поддерживает среднюю
пропускную способность около 34%. Когда количество меток равно начальной длине параметра 70, средняя пропускная способность алгоритма Вогта наиболее близка к теоретической максимальной пропускной способности динамического алгоритма ALOHA.
Рисунок 2 показывает зависимость общего времени считывания от количества меток, находящихся в рабочей зоне считывателя.
Алгоритм Вогта идентифицирует все метки в рабочей зоне ридера быстрее, чем алгоритм Шута. На рисунке 3 и 4 показано время идентификации наборов меток при разных начальных значениях N для алгоритма Вогта и алгоритма Шута соответственно.
10 20 30 40 50 60 70 80 90 100
0.16
0.18
0.2
0.22
0.24
0.26
0.28
0.3
0.32
0.34
Количество меток
Сре
дня
проп
ускн
ая с
посо
бнос
ть
Метод ВогтаМетод Шута
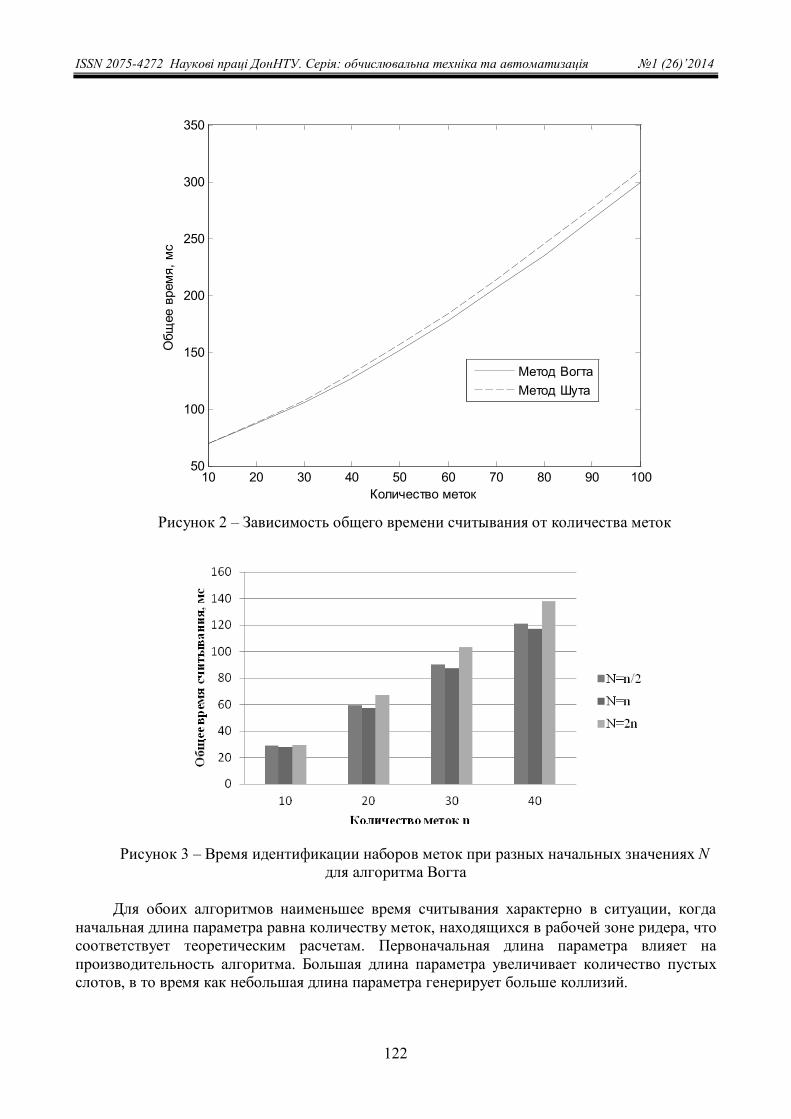
ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
122
Рисунок 2 – Зависимость общего времени считывания от количества меток
Рисунок 3 – Время идентификации наборов меток при разных начальных значениях N для алгоритма Вогта
Для обоих алгоритмов наименьшее время считывания характерно в ситуации, когда
начальная длина параметра равна количеству меток, находящихся в рабочей зоне ридера, что соответствует теоретическим расчетам. Первоначальная длина параметра влияет на производительность алгоритма. Большая длина параметра увеличивает количество пустых слотов, в то время как небольшая длина параметра генерирует больше коллизий.
10 20 30 40 50 60 70 80 90 10050
100
150
200
250
300
350
Количество меток
Общ
ее в
рем
я, м
с
Метод ВогтаМетод Шута

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
123
Рисунок 4 – Время идентификации наборов меток при разных начальных значениях N для алгоритма Шута
Выводы Проведен сравнительный анализ алгоритмов разрешения коллизий с целью достижения
максимальной пропускной способности RFID-системы. В результате исследований предложено усовершенствование динамического алгоритма Slotted-ALOHA с использованием метода Вогта, что позволяет увеличить среднюю пропускную способность системы радиочастотной идентификации и повысить точность оценки количества не идентифицированных меток. Результаты анализа показывают, что этот алгоритм может также уменьшить общее время идентификации меток.
Полученные результаты могут быть использованы для реализации RFID-систем в таких сферах: платежные системы, системы сортировки, контроля технических процессов, складские системы, а также библиотечные системы.
Список использованной литературы 1. Воропаева В.Я. Проблема выбора системы автоматизации библиотечной деятельности
для библиотечно-информационного центра ДонНТУ / В.Я. Воропаєва, А.Ю. Клочко // Система обслуговування користувачів у вузівській бібліотеці: матеріали Всеукраїнської наукової ювілейної конференції, (1-3 жовт. 2009 р., Дніпропетровськ). - Дніпропетровськ, НГУ, 2009. - С. 50-53
2. Ткаченко, Н.О. Комунікаційно-технологічна інфраструктура бібліотечно-інформаційного центру ДонНТУ / Н.О.Ткаченко, В.Я.Воропаєва // Міжнародна науково-практична конференція "Бібліотека ВНЗ на новому етапі розвитку соціальних комунікацій" ДНУЗТ, (22-23 квітня 2010 р.). – 2010. - С. 97.
3. ISO/IEC FCD 14443-3 Identification cards — Contactless integrated circuit(s) cards - Proximity cards — Part 3: Initialization and anticollision
4. B. Zhen, M. Kobayashi (Eds.), Framed ALOHA for multiple RFID objects identification, IEICE T. Commun. 88 (3) (2005), 991–999.
5. H. Vogt, Efficient object identification with passive RFID tags, Proc. IEEE Int. Conf. Pervasive Computing (2002) 98–113.
6. J. Cha, J. Kim, Novel anti-collision algorithms for fast object identification in RFID system, Proc. 11thInt. Conf. Parallel Distributed Syst. (2005) 63–67.
7. Q. Tonga, Q. Zhangb, R. Mina, X. Zoua Bayesian estimation in dynamic framed slotted ALOHA algorithm for RFID system, Comput. Math. Appl. 64 (2012) 1179–1192.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
124
8. W.T. Chen, An accurate tag estimate method for improving the performance of an RFID anti-collision algorithm based on dynamic frame length ALOHA, IEEE T. Automat. Sci. Eng. 6 (1) (2009) 9–15.
9. L.J. Yan, N. Cercone, Bayesian network modeling for evolutionary genetic structures, Comput. Math. Appl. 59 (8) (2010) 2541–2551.
10. Yang, Y. Mei, D. She, J. Li, Chaotic Bayesian optimal prediction method and its application in hydrological time series, Comput. Math. Appl. 61 (8) (2011) 1975–1978.
References 1. Voropaeva, V.Y. and Klochko, A.U. (2009), “The problem of the choice of automation of
library activities for Library and Information Center DonNTU”, Sistema obslugovuvannya koristuvachiv u vuzivskiy bibliotetsi [The user service system at the University Library], Vseukrayinska naukova yuvileyna konferentsiya [All Ukrainian scientific Anniversary Conference], Dnipropetrovsk, Ukraine, 1-3 October 2009, pp. 50-53.
2. Voropaeva, V.Y. and Tkachenko, N.O. (2010), “Communication technology infrastructure of Library and Information Center DonNTU”, Mizhnarodna naukovo-praktichna konferentsiya "Biblioteka VNZ na novomu etapi rozvitku sotsialnih komunikatsiy" [International Scientific Conference "Universities Library in a new stage of social communications"], Dnipropetrovsk, Ukraine, 22-23 April, pp. 97.
3. ISO/IEC (2010) 14443-3: Identification cards — Contactless integrated circuit(s) cards - Proximity cards — Part 3: Initialization and anticollision, APACS, London, England.
4. Zhen, B. and Kobayashi, M. (2005), “Framed ALOHA for multiple RFID objects identification”, IEICE T. Commun., vol. 88, no. 3, pp. 991–999.
5. Vogt, H. (2002), “Efficient object identification with passive RFID tags”, Int. Conf. Pervasive Computing, Budapest, Hungary, 24-28 Mar 2002, pp. 98–113.
6. Cha, J. and Kim, J. (2005), “Novel anti-collision algorithms for fast object identification in RFID system”, 11thInt. Conf. Parallel Distributed Syst., Las Vegas, Nevada, USA, 12-14 September 2005, pp. 63–67.
7. Tonga, Q., Zhangb, Q., Mina, R. and Zoua, X. (2012), “Bayesian estimation in dynamic framed slotted ALOHA algorithm for RFID system”, Comput. Math. Appl., vol. 64, pp. 1179–1192.
8. Chen, W.T. (2009), “An accurate tag estimate method for improving the performance of an RFID anti-collision algorithm based on dynamic frame length ALOHA”, IEEE T. Automat. Sci. Eng., vol.6, no. 1, pp. 9–15.
9. Yang, X., Mei, Y., She, D. and Li, J. (2011), “Chaotic Bayesian optimal prediction method and its application in hydrological time series”, Comput. Math. Appl., vol. 61, no. 8, pp. 1975–1978.
10. Yan, L.J. and Cercone N. (2010), ”Bayesian network modeling for evolutionary genetic structures”, Comput. Math. Appl., vol. 59, no. 8, pp. 2541–2551.
Надійшла до редакції: Рецензент: 28.04.2014 д-р техн. наук, проф. Зорі А.А.
В. Я. Воропаєва, В.І. Кабакчей ДВНЗ «Донецький національний технічний університет» Вибір методів оцінки кількості міток в робочій зоні RFID-рідера для досягнення максимальної пропускної здатності. Виконаний порівняльний аналіз антиколізійних алгоритмів з метою досягнення максимальної пропускної здатності системи радіочастотної ідентифікації. Обрано метод, який дозволяє збільшити середню пропускну здатність RFID-системи. У порівнянні з існуючими алгоритмами, цей алгоритм може оцінити кількість неідентифікованих міток більш

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
125
точно. Результати аналізу показують, що даний алгоритм може також зменшити загальну кількість слотів, які використовуються для ідентифікації міток і збільшити швидкість їх ідентифікації. Ключові слова: мітка, антиколізійний алгоритм, зчитувач, радіочастотна ідентифікація.
V.Y. Voropaeva, V.I. Kabakchey Donetsk National Technical University Choice of methods estimating the number of tags in the operational range of the reader to maximize the throughput. A typical RFID system consists of tags, a reader as well as data processing parts. Each tag has its own ID called unique ID (UID) which is fixed at the manufacturing stage. Each UID will be transmitted to the reader by itself when the tag is in the operational range of the reader. If the tag is identified successfully, the reader will send commands to this specific tag. After this, the communication process between tags and reader finishes. However, under many application conditions, such as in a warehouse, a supermarket or at a motorway tollbooth, there could be a large number of tags within the operational range of reader at the same time. When two or more tags communicate with the reader simultaneously, signals will interfere with each other and the reader will detect a collision. The collision will reduce the identification efficiency of the RFID system dramatically. One of the critical challenges for RFID systems is maximizing the tag identification speed while maintaining low computational complexity. Due to its high throughput under high load conditions DFSA was widely applied in RFID system to reduce the collisions during the communication process between the tags and reader. It adjusts the frame length dynamically according to the estimation of the backlog, and it obtained a relatively high throughput under heavy load conditions. Thus, there is a problem of exact definition of number of tags in the operational range of the reader. The maximum throughput of the RFID system can be reached when the number of slots in a frame equals the number of unidentified tags The comparative analysis of anti-collision algorithms to achieve maximum throughput of radio frequency identification system is carried out. Selected a method that allows to increase the average throughput of RFID system. Compared with existing algorithms, this algorithm can estimate the number of unidentified tags more precisely. Analysis results show that this algorithm can also reduce the total slots used to identify tags and increase the tag identification speed. Keywords: tag, anti-collision algorithm, reader, radio frequency identification.
Кабакчей Виктория Ивановна, Украина, Донецкий национальный технический университет, магистр кафедры автоматики и телекоммуникаций ГВУЗ «Донецкий национальный технический университет» (ул. Артема, 58, г. Донецк, 83001, Украина). Основное направление научной деятельности – исследование характеристик RFID-систем.
Воропаєва Вікторія Яківна, Україна, закінчила Донецький національний технічний університет, канд. техн. наук, доцент, професор кафедри автоматики та телекомунікацій ДВНЗ «Донецький національний технічний університет» (вул. Артема, 58, м. Донецк, 83001, Україна). Основний напрямок наукової діяльності – сучасна теорія телетрафіку, оптимізація телекомунікаційних та інформаційно-комунікаційних систем та мереж.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
© Кануннікова К.П., Червинський В.В., 2014 126
УДК 621.396
К.П. Кануннікова, В.В. Червинський (канд. техн. наук, доц.) ДВНЗ «Донецький національний технічний університет», м. Донецьк
кафедра автоматики та телекомунікацій e-mail: [email protected]
АЛГОРИТМ ДИНАМІЧНОГО РЕГУЛЮВАННЯ СПОЖИВАНОЇ ПОТУЖНОСТІ МІКРОСТІЛЬНИКАМИ ГЕТЕРОГЕННОЇ МЕРЕЖІ LTE
У роботі проаналізовано питання підвищення енергоефективності базових станцій мобільних мереж зв’язку на базі технології LTE, показано що одним з варіантів його вирішення є використання динамічного енергозбереження. Розроблено імітаційну модель гетерогенної LTE мережі, яка включає макростільники, мікростільники та Wi-Fi зони. Розроблено алгоритм динамічного регулювання споживаної потужності сайту на основі інформації про місцезнаходження активних абонентів. Проведено моделювання режимів роботи гетерогенної мережі. Ключові слова: гетерогенна мережа, LTE, Wi-Fi, місцезнаходження активних абонентів, споживана потужність базової станції, макростільник, мікростільник.
Загальна постановка проблеми Зі значним зростанням вимог абонентів до швидкості передачі даних у змозі впоратися
технологія LTE стандарту 3GPP, яка здатна забезпечити швидкість передачі даних від 100 Мбіт/с та вище. Такого напрямку слід дотримуватись і українським операторам. Але в процесі проектування оператор стикається с такою проблемою, як нерівномірність розміщення абонентів у мережі. Використання в мережі лише макростільників не дозволяє ефективно регулювати пропускну здатність об’єкта проектування. Одним з шляхів рішення такої задачі є впровадження гетерогенної мережі, яка використовує мікро- та макрос тільники [9].
В такій мережі за рахунок одночасної роботи багатьох стільників різного рівня значно збільшується споживана потужність мережі. Таким чином, виникає проблема скорочення енергоспоживання обладнання, а саме базових станцій, оскільки вони споживають до 80% всієї енергії, що потрібна для роботи мережі Скорочення енергоспоживання мережею дає можливість як зниження експлуатаційних витрат оператора зв’язку, так і покращення екологічної обстановки.
Ця проблема характерна не тільки для гетерогенних мереж стандарту LTE. Основними заходами щодо зниження споживаної потужності базовими станціями є використання альтернативних джерел енергії, оптимізація числа базових станцій, зниження споживаної потужності за рахунок більш сучасного обладнання, гнучка (динамічна) зміна ємності мережі в залежності від її завантаженості [5].
Постановка задач дослідження Основним завданням даної роботи є дослідження можливостей динамічного зміни
ємності гетерогенної мережі в залежності від її завантаженості з метою зменшення енергоспоживання мережею в цілому і базовими станціями зокрема.
Для дослідження динамічного регулювання споживаної потужності сайту гетерогенної мережі LTE/Wi-Fi, яка будується за принципом поєднання макро- та макрорівнів мережі, необхідно вирішити наступні задачі:
1. Проаналізувати методи динамічної зміни ємності гетерогенної мережі в залежності від її завантаженості.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
127
2. Розробити алгоритм динамічного регулювання вживаної потужності сайта на основі пеленгування активних абонентських терміналів.
3. розробити імітаційну модель гетерогенної мережі, перевірити за її допомогою функціональність запропонованих рішень.
Рішення задачі і результати досліджень Досягнення якісного обслуговування абонентів вимагатиме збільшення продуктивності
сайту мережі. При цьому найбільш проблемними місцями залишаються: краї стільника, закриті приміщення та відкриті площі, де спостерігається велике скупчення абонентів. Саме в таких «проблемних зонах» пропонується встановлювати мікростільники та точки доступу AP Wi-Fi [8]. З іншого боку, оператори стикаються з більш високими витратами за кіловат-годину і збільшується вплив на навколишнє середовище. Скорочення енергоспоживання обладнання стільникового зв'язку дозволяє не тільки скоротити операційні витрати оператора, але і знизити викид CO2. Динамічне регулювання вживаної потужності мережі – це інтелектуальний спосіб знизити енергоспоживання мережі. Основна ідея полягає в зниженні потужності мережевого елемента у разі зміни навантаження у мережі. Це може бути зроблено за рахунок відключення малих стільників та точок доступу Wi-Fi або зниження швидкості передачі даних у сайті. Ключові підходи до керування тригерами вимкнення/увімкнення стільників та AP Wi-Fi:
- розподілений підхід, який не вимагає залучання OAM; - централізований підхід, тобто, центральна система управління OAM (SON) відповідає за диспетчеризацію мережі і за її режим роботи; - гібридна архітектура поєднує розподілені і централізовані підходи.
Звичайно, більш функціональним є варіант впровадження гібридної архітектури мережі SON [3]. Не заважаючи на всі переваги цього підходу, він не є оптимальним. Оскільки його реалізація вплине на показники CAPEX, OPEX та значно ускладнить архітектуру гетерогенної мережі. Тому пропонується впровадження централізованої системи SON. У централізованій OAM системі eNB буде інформувати, наприклад, через кожні 5 хв. про поточну ситуацію з навантаженням. Остаточне рішення для відключення проводиться системою OAM. Перевага централізованої системи стає відразу очевидною, OAM має повне картину всіх стільників у мережі. У гібридній архітектурі еNB можуть самостійно виходити/входити у сплячий режим. У разі, якщо QoS не досягає зазначеного рівня за рахунок активного макрорівня, можуть бути активовані мікростільники. Повне відключення мікростільника в періоди низького навантаженням або відсутності навантаження можливе, оскільки покриття підтримується макрорівнем. OAM визначає навантаження на мікростільник та приймає рішення, щодо його відключення. Після цього мікростільник вже не може аналізувати навантаження у його радіусі покриття. Тому задача ввімкнення мікростільника стає важливим питанням. Для цього використовуються такі методи: згідно статистичних даних встановлюється час включення та відключення стільника; всі стільники включені, режим відключення стільника заборонено; сплячий режим; мікростільники вмикаються з певною частотою.
У всіх цих методів є один значний недолік – відсутня можливість динамічного регулювання режиму роботи мережі залежно від навантаження на неї. Замість відключення мікростільника пропонується динамічне регулювання вживаної потужності малими стільниками відповідно до зміни навантаження у мережі. Макростільник виконує диспетчеризацію сайта: визначає місце знаходження абонентів та навантаження, яке вони створюють. Отримані дані eNB передає до блоку OAM (SON). Там відбувається вибір способу підключення UE: макростільник, мікростільник, AP Wi-Fi. UE може знаходитись у двох станах: UE обслуговується AP доти, доки UE знаходиться у зоні покриття АР та на UE увімкнено модуль Wi-Fi; UE обслуговується eNB або HeNB доти, доки UE знаходиться поза зоною покриття АР та на UE не увімкнено модуль Wi-Fi.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
128
Таким чином, АР володіє більшим пріоритетом для UE, завдяки більш високої пропускної здатності та більш низької вартості трафіку у порівнянні з мережею LTE. Якщо UE знаходиться у зоні покриття декількох АР, то OAM буде обирати АР виходячи з таких показників, як вартість та продуктивність, враховуючи при цьому розподіл навантаження. При позиціонуванні UE виникають складності, оскільки зараз оператори мобільного зв'язку не забезпечують високої точності позиціонування абонентських станцій, що істотно ускладнює завдання регулювання потужності мікростільника. У зв'язку з цим необхідна розробка і впровадження нових підходів систем позиціонування, тому рішення на основі спільно функціонуючих мереж мобільного зв'язку та спеціальної пеленгаційної мережі представляється актуальним. Існуючі технології позиціонування в мережах мобільного зв'язку дають велику похибку позиціонування UE або вимагають значних витрат на їх реалізацію. У зв'язку з цим більшість операторів мобільного зв'язку на практиці використовують найпростіший і дешевий метод позиціонування, заснований на визначенні ідентифікатора стільника (Cell-ID), в якому знаходиться UE. Але його точність позиціонування не є достатньою для впровадження гетерогенних рішень. У мережах третього покоління перспективною технологією є визначення місця розташування по напрямку прийому і виміру різниці часу прийому сигналів. Завдання позиціонування вирішується у кілька етапів [5]:
1 Процедура визначення Cell-ID мереж, в якому знаходиться абонентська станція. 2 Процедура визначення списку вимірювальних пунктів ВП. На даному етапі після
надходження у пульті керування інформації про Cell-ID, в якому знаходиться UE, далі відбувається зіставлення «Cell-ID - ВП». Пульт управління містить базу даних відповідності «Cell-ID-ВП, які обслуговують даний Cell-ID». Інформація про зону знаходження UE надходить з пульта управління через контролер базових станцій на відповідні ВП для позиціонування UE з більш високою точністю.
3 Алгоритм виходу абонентської станції на максимальну потужність передачі. У процесі позиціонування, коли UE наближається до БС, її потужність зменшується і виникає проблема електромагнітної доступності по висхідній лінії від UE до ВП, що в свою чергу суттєво зменшує точність позиціонування. Для цього пропонується використовувати алгоритм примусового виведення на максимальну потужність передавача UE на короткий проміжок часу.
4 Процедура позиціонування абонентської станції засобами пеленгаційної мережі. Вимірюваними параметрами є кути напрямку приходу випромінювання UE щодо лінії (бази), що з'єднує два ВП мережі.
Вимірювальні пункти пеленгаційної мережі розташовуються в позиційних районах базових станцій (eNB) і мають у своєму складі приймачі LTE та антенні пристрої, що є прийомними фазованими антенами решітки (ФАР) з електронним управлінням. Управління та обробка результатів роботи пеленгаційної мережі проводиться в спеціальному пульті управління, який взаємодіє з контролерами і системою комутації мережі мобільного зв'язку.
Отже, підведемо підсумки, щодо алгоритму динамічного регулювання потужності. Допустимо, що А={a1,..,an}, B={b1,..,bn} та C={c1,..,cm} – це AP Wi-Fi, та HeNB та eNB відповідно. При цьому m=1, або значно менше за n, так як множина точок доступу розгортається в середині зон покриття мобільної мережі. ОАМ зберігає список А, В та С, як список можливих кандидатів для підключення, також зберігає інформацію щодо завантаженості кожного з них. U={u1,..,uk} – це АС. Кожний АС вимагає підключення, кожна АР та HeNB або eNB можуть забезпечити певну максимальну пропускну здатність (Ymacro_max, Ymicro_max, Ywifi_max). Таким чином, після знаходження точного місця знаходження абонента у мережі, відбувається визначення способу підключення абонента у мережу, це може здійснитися через макростільник, мікростільник та AP Wi-Fi. Пріоритетним є підключення абонента до АР, це відбувається, якщо абонент знаходиться у зоні покриття АР,

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
129
та на пристрої, з якого здійснюється запит на підключення до Інтернету, увімкнений модуль Wi-Fi. Якщо абонент підключився через АР Wi-Fi, то перераховується навантаження на АР Wi-Fi, якщо ж ні, то перевіряється можливість підключення до мікростільника. За умови, що абонент знаходиться у зоні покриття мікростільника і на нього вистачає пропускної здатності, абонент підключається до мікрорівня. У іншому випадку абонент підключається до макростільника. Тепер залежно від навантаження на макрорівень розраховується необхідну зону покриття мікростільника:
max_
maxmicro
micromicro Y
YRR , (1)
де Rmax – максимальний радіус зони покриття мікростільника, Rmicro – розрахований необхідний за даним навантаженням на мережу радіус зони покриття стільника, Ymicro – навантаження на мікростільник у даний момент, Ymicro_max – максимальна пропускна здатність мікростільника. Таким чином, радіус зони покриття стільника залежить від поточного навантаження на мережу. Блок-схему алгоритму наведено на рис. 1.
Рисунок 1 – Блок-схема алгоритму динамічного регулювання потужності мережі

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
130
Задля спостереження ефективності гетерогенних мереж створено імітаційну модель. Модель забезпечена сучасним графічним інтерфейсом та використовує мову програмування Javascript. Модель дозволяє змінюючи конфігурацію мережі досліджувати зміну пропускної здатності мережі, її завантаження, кількість абонентів, що обслуговуються. Також модель реалізує алгоритм динамічного регулювання потужності мікростільника. Моделювання проводиться для умов міста, для місць, де спостерігається перевантаження мережі, внаслідок великої кількості абонентів. Вхідні дані моделі: радіуси, споживані потужності, максимальні пропускні здатності макростільника, мікростільника та АР
Моделювання проводиться для діапазону 1800 МГц, для умов міста, для яких найбільш підходить модель згасання сигналу Cost231-Hata. Радіуси макро- та мікросот розраховуються з обліком основних витрат сигналу на трасі [4]:
,lg)lg(55,69,44)()lg(87,13)lg(26,2655,69 RhhahfL bmbH (2) де f – частота, МГц; hb - висота антени базової станції, м; d – відстань від передавача до приймальника, км; a(hm) - поправочний коефіцієнт:
.8,0)lg(56,17,0)lg(1,1)( fhfha mm (3) Стани мережі при моделюванні: - працює лише макростільник; - працює макростільник та одна/дві мікростільники (режим динамічного регулювання
вимкнено/увімкнено); - працює макростільник, одна/дві мікростільники та точки доступу Wi-Fi (режим
динамічного регулювання вимкнено/увімкнено). Для стану, коли працює макростільник, спостерігається перевантаження макрос
тільника. Це означає, що частин абонентів отримають відмову у доступі до мережі. Для стану, коли працює макростільник та два мікростільник, макромережа розвантажилась, та ємність сайта значно зросла. Але незначне перевантаження одного мікростільника також може призвести до відмови доступу до Інтернет. При вмиканні АР Wi-Fi всі абоненти забезпеченні якісним зв’язком, імовірність відмови у з’єднанні значно знизилась. Зростання пропускної здатності в 2 рази призводить до непомірного зростання споживаної потужності стільниками. Але мережа мікростільників не завантажені, мережа в цілому працює не ефективно. Для вирішення цієї проблеми застосовується алгоритм динамічного регулювання споживаної потужності мікростільниками. Результати моделювання наведено на рис. 2, 3.
0
200
400
600
800
1000
1400
1
2
1200
Рисунок 2 –Залежність споживаної потужності мережі залежно від її стану: 1 - режим динамічного регулювання мікростільника вимкнений, 2 - увімкнений)

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
131
Рисунок 3 –Залежність пропускної здатності мережі від її стану
Висновки 1. Проаналізовано засоби зменшення споживаної потужності гетерогенною мережею
LTE. Розглянуто можливість достовірного визначення місцезнаходження абонента. 2. Розроблено алгоритм динамічного регулювання споживаної потужності
мікростільниками. 3. Проведено моделювання режимів роботи гетерогенної мережі. Результати
моделювання підтвердили ефективність впровадження гетерогенних рішень сумісно з алгоритмом динамічного регулювання вживаної потужності мікростільниками.
Список використаної літератури 1. 4G Americas. Developing Integrating High Performance HET-NET, 2012. Спосіб доступу:
http://www.4gamericas.org/documents/4G%20Americas%20-Developing%20Integrating %20High%20Performance%20HET-NET%20October%202012.pdf
2. 4G Americas. 4G Mobile Broadband Evolution. 3GPP Release 11 & Realease 12 and Beyond, 2014. Спосіб доступу: http://www.4gamericas.org/documents/4G%20Mobile%20 Broadband%20 Evolution%20Rel-11%20%20Rel%2012%20and%20Beyond%20Feb%202014 %20-%20FINAL.pdf
3. Hämäläinen S. LTE self-organising networks (SON): network management automation for operational efficiency / S. Hämäläinen, H. Sanneck, C. Sartori. - United Kingdom: John Wiley & Sons Ltd, – 2012. – 428 p.
4. Rumney M. LTE and the Evolution to 4G Wireless: Design and Measurement Challenges. / Moray Runney. – Agilent Technologies. – 2008. – 557 p.
5. Бабков В.Ю. Повышение точности позиционирования в сетях мобильной связи / В.Ю. Бабков, А.Н. Степутин // Нацчно-технические ведомости СПбГПУ. – 2011. - Вип. 4 (128). – С. 14-20.
6. Модель розвитку мережі мобільного оператора при використанні технології LTE/SON / И.В. Дегтяренко, Д.С. Шахов, Д.А. Кнерцер, А.А. Орехов // Наукові праці Донецького національного технічного університету. Серія: Обчислювальна техніка та автоматизація. – 2011. - Вип. 20 (182). – С. 130-136.
7. Воропаєва В.Я. Алгоритм вертикального хендовера у гетерогенній бездротовій мережі / В.Я. Воропаєва, А.Д. Гришаєва // Наукові праці Донецького національного технічного університету. Серія: Обчислювальна техніка та автоматизація. – 2013. - Вип. 2 (25). - С. 96-103.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
132
8. Емельянов А.К. Пути повышения энергоэффективности подсистемы базовых станций сетей сотовой связи [Электронный ресурс] / А.К. Емельянов // Интернет-журнал «Науковедение». - 2013. - №4 (17). - Режим доступа: http://naukovedenie.ru/PDF/30evn413.pdf.
9. Мисар П. Как lte повлияет на инфраструктуру сети и энергопотребление базовых станций [Электронный ресурс] / П. Мисар. - 2011. - Режим доступа: http://www.iksmedia.ru/articles/3928664-Kak-LTE-povliyaet-na-infrastrukturu.html.
References 1. 4G Americas (2012), “Developing Integrating High Performance HET-NET”, available at:
http://www.4gamericas.org/documents/4G%20Americas%20-Developing%20Integrating%20High %20Performance%20HET-NET%20October%202012.pdf (Accessed 25 January 2014).
2. 4G Americas (2014), “4G Mobile Broadband Evolution. 3GPP Release 11 & Realease 12 and Beyond”, available at: http://www.4gamericas.org/documents/4G%20Mobile%20 Broadband%20 Evolution%20Rel-11%20%20Rel%2012%20and%20Beyond%20Feb%20 2014%20-%20FINAL.pdf
3. Babkov, V.Yu. and Steputin, A.N. (2011) “Increasing the accuracy of positioning in mobile networks”, Nauchno-tekhnicheskie vedomosti SPbGPU, no. 4 (128), pp.14-20.
4. Degtyarenko, I.V., Shakhov, D.S., Knertser, D.O. and Orekhov, O.O. (2011) “Model of development of the mobile operator’s network based on LTE/SON technology”, Naukovi pratsi Donetskoho natsionalnohо tekhnichnoho universytetu. Seria: Obchyslyuvalna tekhnika ta avtomatyzatsiya , no 20 (182), pp. 130-136.
5. Emeyanov, A.K. (2013) Ways to improve the energy efficiency of base station subsystem mobile networks”, Internet-magazine «Naukovedenie», no. 4 (17). available at: http://naukovedenie.ru/PDF/30evn413.pdf
6. Hämäläinen, S., Sanneck, H. and Sartori, C. (2012), LTE self-organising networks (SON): network management automation for operational efficiency, John Wiley & Sons Ltd, United Kingdom
7. Misar P. (2011), “How LTE affects the network infrastructure and the consumption of base stations”, available at: http://www.iksmedia.ru/articles/3928664-Kak-LTE-povliyaet-na-infrastrukturu.html
8. Rumney, M. (2008), LTE and the Evolution to 4G Wireless: Design and Measurement Challenges, Agilent Technologies. UK
9. Voropayeva, V. and Grishaeva A. (2013) “A Vertical Handover Algorithm for Heterogeneous Wireless Networks”, Naukovi pratsi Donetskoho natsionalnohо tekhnichnoho universytetu. Seria: Obchyslyuvalna tekhnika ta avtomatyzatsiya , no 2 (25), pp. 96-103.
Надійшла до редакції: Рецензент: 12.05.2014 д-р техн. наук, проф. Скобцов Ю.О.
К.П. Канунникова, В.В. Червинский ГВУЗ «Донецкий национальный технический университет» Алгоритм динамического регулирования потребляемой мощности микросотами гетерогенной сети LTE. В работе проанализированы вопросы повышения энергоэффективности базовых станций мобильных сетей связи на базе технологии LTE, показано, что одним из вариантов их решения является использование динамического энергосбережения. Разработана имитационная модель гетерогенной LTE сети, включающей макросоты, микросоты и Wi - Fi зоны. Разработан алгоритм динамического регулирования потребляемой мощности

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
133
сайта на основе информации о местонахождении активных абонентов. Проведено моделирование режимов работы гетерогенной сети. Ключевые слова: гетерогенная сеть, LTE, Wi-Fi, местонахождение активных абонентов, потребляемая мощность базовой станции, макросота, микросота.
K.P. Kanunnikova, V.V. Chervinskiy Donetsk National Technical University Power consumption dynamic adjustment algorithm for microcells of heterogeneous LTE network. This paper analyzes the issues of energy consumption efficiency increase for base stations and access points in heterogeneous mobile networks based on technology LTE. It is considered that one way to reduce the power consumption of a heterogeneous network is the temporary shutdown of separate microcells in the periods of reduced network loading, that is, the use of dynamic energy savings. It is shown that the implementation of this approach is the most appropriate with the use of centralized control system OAM (SON) with the ability to obtain current information about the location of active subscribers. The use of promising technologies in determining the location of the subscriber in the direction of receiving and measuring the time difference in signal reception is proposed. The dynamic adjustment algorithm of the site power consumption based on information about the location of active subscribers and the required bandwidth is developed. The conditions are given according to which the selection of the connection method (by macrocell, microcell or Wi-Fi access point) for the active subscriber to the network is made. Correspondingly the conditions are determined for including the base stations and access points. In order to evaluate the effectiveness of the solutions the simulation model of heterogeneous LTE network for large cities is developed including macrocells, microcells and Wi - Fi zones. The simulation is conducted for operation modes of heterogeneous LTE network. The significant decrease (20-30% ) of the power consumption of a heterogeneous LTE network is shown using the proposed algorithm. Keywords: heterogeneous network, LTE, Wi-Fi, location of active subscribers, power consumption of base station, macrocell, microcell.
Кануннікова Катерина Павлівна, Україна, навчається у Донецькому національному технічному університеті (вул. Артема, 58, м. Донецьк, 83001, Украйна). Основний напрямок наукової діяльності – розробка та дослідження гетерогенної мережі на базі технологій LTE/Wi-Fi. Червинський Володимир Володимирович, Україна, закінчив Донецький національний технічний університет, канд. техн. наук, доцент, доцент кафедри автоматики та телекомунікацій ДВНЗ «Донецький національний технічний університет» (вул.. Артема, 58, м. Донецьк .83001, Україна). Основний напрямок наукової діяльності – автоматизація складних технологічних процесів, промислові системи телекомунікацій.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
© Klymash M.M., Haider Abbas Al-Zayadi, Lavriv O.A., 2014 134
УДК 621.396
M.M. Klymash, Haider Abbas Al-Zayadi, O.A. Lavriv Lviv Polytechnic National University, Lviv,
Department of Telecommunications, e-mail: [email protected], [email protected], [email protected]
IMPROVING THOUGHPUT USING CHANNEL QUALITY INDICATOR IN LTE TECHNOLOGY
This article focuses on the downlink performance of LTE physical layer on MIMO antenna with Channel Quality Indicator (CQI) Feedback. The other parameter used in this article is Pedestrian A (PedA) channel and Pedestrian B (PedB) channel models for several transmission modes which is Transmit Diversity, Open Loop Spatial Multiplexing and Closed Loop Spatial Multiplexing. Multiple Input Multiple Output (MIMO) systems form an essential part of LTE in order to achieve the ambitious requirements for throughput and spectral efficiency [1]. Adaptive transmission schemes that adjust transmission parameters with respect to time-varying channels enable robust and spectrally efficient communications. In this paper we deal with developing the CQI by using feedback for the data transmitting, Open Loop Spatial Multiplexing and Closed Loop Spatial Multiplexing by using multiple antennas in the transmitter and receiver (MIMO). Key words: LTE, CQI, throughput improving.
Introduction The LTE base stations are called Evolved NodeBs (eNodeBs) which is the main component
of the LTE radio access network (RAN) architecture. The mobile terminals are commonly referred to as user equipments (UEs). The functionalities of eNodeB and UEs are divided into different protocol layers. The Figure 1 shows a simplified diagram showing the different layers and the data flow for downlink transmission [1, 2].
Figure 1 – LTE protocol stack
The IP packets enter the protocol stack at Packet Data Convergence Protocol (PDCP) layer
and flows through the protocol stack down to the Physical layer before entering the radio interface.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
135
In cellular communication systems, the quality of the signal received by a UE depends on the channel quality from the serving cell, the level of interference from other cells, and the noise level. To optimize system capacity and coverage for a given transmission power, the transmitter should try to match the information data rate for each user to the variations in the received signal [3]. This is commonly referred to as link adaptation and is typically based on Adaptive Modulation and Coding (AMC).
For the downlink data transmissions in LTE, the eNodeB typically selects the Modulation and Coding Scheme (MCS) depending on the Channel Quality Indicator (CQI) feedback transmitted by the UE in the uplink. In general, in response to the CQI feedback the eNodeB can select between QPSK, 16-QAM and 64-QAM schemes with a wide range of code rates. For the LTE uplink transmissions, the link adaptation process is similar to that for the downlink, with the selection of MCS also being under the control of the eNodeB. But the eNodeB can directly make its own estimate of the supportable uplink data rate by channel sounding. An identical channel coding structure is used for the uplink, while the modulation scheme may be selected between QPSK and 16QAM. The 64QAM is optional for the LTE UL. A simple method by which a UE can choose an appropriate CQI value could be based on a set of Block Error Rate (BLER) thresholds. The UE would report the CQI value corresponding to the MCS that ensures BLER ≤ 10% based on the measured received signal quality. The list of modulation schemes and code rates with CQI values supported by 3GPP LTE standards is shown in Table 1.
Table 1
CQI table for modulation schemes
CQI index Modulation Approximate code rate Efficiency(information bits per symbol)
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
No transmission QPSK QPSK QPSK QPSK QPSK QPSK QPSK
16QAM 16QAM 16QAM 64QAM 64QAM 64QAM 64QAM 64QAM
― 0,076 0,120 0,190 0,300 0,440 0,590 0,370 0,480 0,600 0,450 0,550 0,650 0,750 0,850 0,930
― 0,1523 0,2344 0,3770 0,6016 0,8770 1,1758 1,4766 1,9141 2,4063 2,7305 3,3223 3,9023 4,5234 5,1152 5,5547
Main part In LTE, MIMO technologies have been widely used to improve downlink peak rate, cell
coverage, as well as average cell throughput. To achieve this diverse set of objectives, LTE adopted various MIMO technologies including transmit diversity, single user (SU)-MIMO, multiuser (MU)-MIMO, closed-loop rank-1 precoding, and dedicated beamforming. The transmit diversity scheme is specified for the configuration with two or four transmit antennas in the downlink, and with two transmit antennas in the uplink. The closed-loop rank-1 precoding scheme is used to improve data coverage utilizing SU-MIMO technology based on the cell-specific common reference signal while introducing a control signal message that has lower overhead. The dedicated beamforming scheme is used for data coverage extension when the data demodulation based on dedicated reference signal is supported by the UE [4].

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
136
Figure 2 – SU-MIMO and MU-MIMO
a) Transmit Diversity
SFBC with two transmit antennas on downlink:
Subcarrier
SSSS
AntennaAntenna
*0
*1
10
1_0_
(1) SFBC + FSTD with four transmit antennas on downlink:
0 1
2 3* *1 0
* *3 2
0 0_ 00 0_1
0 0_ 20 0_ 3
Subcarrier
S SAntennaS SAntenna
s sAntennas sAntenna
(2)
Modified SFBC + FSTD for PHICH with four transmit antennas on downlink:
0 1 2 3 0 1 2 3
0 1 2 3* * * * * * * *1 0 3 2 1 0 3 2
* * * *1 0 3 2
1 2
0 0 0 0_ 0_1 0 0 0 0 0 0 0 0
_1:0 0 0 0_ 2
_ 3 0 0 0 0
Subcarrier
st ndrepetition repetition
Antenna S S S S S S S SS S S SAntenna
TypeAntenna S S S S S S S S
S S S SAntenna
3
0 1 2 3
0 1 2 3* * * *1 0 3 2
* * * *1 0 3 2
21
0 0 0 0
0 0 0 0_ 0_1 0 0 0 0
_ 2 :0 0 0 0_ 2
_ 3 0 0 0 0
rd
Subcarrier
ndst
repetition
repetitiorepetition
Antenna S S S SS S S SAntenna
TypeAntenna S S S S
S S S SAntenna
0 1 2 3
* * * *1 0 3 2
3
0 0 0 0
0 0 0 0
rdn repetition
S S S S
S S S S
(3)
Once the number of transmit antennas at eNodeB is detected, a specific transmit diversity scheme applicable to the other physical downlink channels is determined. Transmit diversity schemes defined for LTE downlinks are illustrated in (1) – (3). The space-frequency block code (SFBC) as shown in (1) is used if the eNodeB has two transmit antennas. For the eNodeB with four transmit antennas, a combination of the SFBC and the frequency switched transmit diversity (FSTD) as shown in (2) is used to provide robustness against the correlation between channels from different transmit antennas and for easier UE receiver implementation. The transmit diversity scheme shown in (2) can be used for all downlink channels other than PHICH. The transmit diversity scheme used for PHICH is shown in (3). When there are multiple PHICHs transmitted, using type 1 or type 2 alternatively for different PHICHs would be helpful to keep uniform power distribution over eNodeB transmit antennas [4].
b) Open Loop Spatial Multiplexing The eNodeB sends the scheduled UE the information about what precoding matrix is used as
a part of downlink control information, using a three-bit information field for two transmit antennas and a six-bit information field for four transmit antennas. This information field is denoted transmit precoding matrix indication (TPMI). To support frequency-selective precoding without excessive downlink signaling overhead, the TPMI can also indicate that the precoding matrices reported in the most recent PMI report from the scheduled UE are used for their corresponding frequency

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
137
resources. Use of the transmit diversity is indicated by TPMI. The open-loop spatial multiplexing may be operated when reliable PMI feedback is not available at the eNodeB, for example, when the UE speed is not slow enough or when the feedback overhead on uplink is too high. The open-loop spatial multiplexing with M layers and N transmit antennas (N≥M) is illustrated in Figure 3. The feedback consists of the RI and the CQI in open-loop spatial multiplexing. In contrast to the closed-loop spatial multiplexing, the eNodeB only determines the transmission rank and a fixed set of precoding matrices are applied cyclically across all the scheduled subcarriers in the frequency domain [4].
Figure 3 – Open-loop spatial multiplexing with N antennas and M layers
c) Closed Loop Spatial Multiplexing
The base station (also known as eNodeB) applies the spatial domain precoding on the transmitted signal taking into account the precoding matrix indicator (PMI) reported by the UE so that the transmitted signal matches with the spatial channel experienced by the UE. The closed-loop spatial multiplexing with M layers and N transmit antennas N M is illustrated in Figure 4. To support the closed-loop spatial multiplexing in the downlink, the UE needs to feedback the rank indicator (RI), the PMI, and the channel quality indicator (CQI) in the uplink. The CQI feedback indicates a combination of modulation scheme and channel coding rate that the eNodeB should use to ensure that the block error probability experienced at the UE will not exceed 10% [4].
Figure 4 – Closed-loop spatial multiplexing with N antennas and M layers
In our article, both Pedestrian A and Pedestrian B channel models was used. The mobile
speed considered to be 3km/h in each of these cases .The number of taps incase of Pedestrian A model is 4 while Pedestrian B has 6 taps. The average powers and relative delays for the taps of multipath channels based on ITU recommendations are given in table 2.
Table 2
ITU Pedestrian Channel Model Channel A Channel B Tap Relative delay (ns) Average power (dB) Relative delay (ns) Average power (dB)
1 0 0 0 0 2 110 -9,7 200 -0,9 3 190 -19,2 800 -4,9 4 410 -22,8 1200 -8,0 5 ― ― 2300 -7,8 6 ― ― 3700 -23,9
ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
138
In LTE downlink, the quality of channel is measured in the UE and sent to the eNodeB in the form of so-called CQIs (Channel Quality Indicator). The quality of the measured signal depends not only on the channel, the noise and the interference level but also on the quality of the receiver, e.g. on the noise figure of the analog front end and performance of the digital signal processing modules. That means a receiver with better front end or more powerfull signal processing algorithms delivers a higher CQI. The signal quality measurements are done using reference symbols. In Figure 5 the whole signal generation chain of the LTEs physical layer with Turbo coding and modulation modules can be seen, which are parts of the link adaptation system.
In the LTE physical layer, resources are managed with the so-called RM Modules (Resource Management), which assign incoming data blocks to resource blocks. One resource block consists of 12 sub-carriers and one time slot. The resource management in LTE can be seen in Figure 6 CQI values are used also to select the optimum resource block i.e. the optimum sub-carrier and the optimum time slot.
Figure 5 – Signal generation chain in LTE
There are two kinds of CQI reporting: periodic and aperiodic, where the PUCCH (Physical
Uplink Control Channel) is used for periodic CQI reporting only and PUSCH (Physical Uplink Shared Channel) for aperiodic CQI reporting.
Figure 6 – Two dimensional resource management in LTE
Periodic CQIs are reported by the UE in periodic time intervals. If the eNodeB wishes
channel quality information at a specific time, aperiodic CQIs are triggered. In order to define the frequency granularity of the CQI, the whole system bandwidth is divided into N sub-bands, each consisting of k contiguous Physical Resource Blocks (PRBs). The number of sub-bands is given by
DLRBN N k and determines the frequency granularity of the CQI reporting, where DL
RBN is the number of resource blocks (RB) in the whole system bandwidth (DL stands for Downlink).
a) Periodic CQI reporting The periodic reporting of the CQIs is done over the PUCCH. Periodic CQI can be either
wideband or UE-selected sub-band feedback for all downlink transmission modes. The type of CQI

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
139
is decided by the eNodeB. In the wideband mode, one CQI value is measured in the whole system bandwidth and sent to the eNodeB. In the UE-selected sub-band feedback the total number of sub-bands N in the whole system bandwidth is divided into j fractions called bandwidth parts. In each bandwidth part a particular sub-band is selected and the measured channel quality in this sub-band with its position in the bandwidth part is sent to eNodeB. In Table 3 sub-band size (k) and bandwidth parts (J) versus downlink system bandwidth DL
RBN can be seen. Normally periodic CQIs are used but if eNodeB needs channel quality information at times
rather than time raster of the periodic CQI, it can also wish aperiodic transmission of the CQIs by the UE. Losses of synchronization or handover situations are also cases, where aperiodic CQIs are used. Aperiodic CQI reporting is done over the PUSCH and requested by the eNodeB by setting a CQI request bit on the Physical Downlink Control Channel (PDCCH).
The type of CQI is set by the eNodeB and can be one of the following modes: 1. Wideband feedback: in this mode as in the periodic reporting, the UE reports one CQI
value for the whole system bandwidth. 2. eNodeB-configured sub-band feedback: there are two kinds of CQI reported in this mode,
one for the whole system bandwidth and one for the sub-bands. In the calculation of sub-band CQIs, it is assumed that transmission takes place only in the relevant sub-band.
3. UE-selected sub-band feedback: as in the eNodeB-configured mode, two types of CQIs are used, one wideband CQI value for the whole system bandwidth and one for reporting the average measured CQI in M selected sub-bands each of the size k. The UE decides which sub-bands are selected. The UE sends also the position of the M selected sub-bands.
Table 3
Number of resource blocks in the whole system bandwidth ( DLRBN ), number of resource blocks in a
sub-band (k) and bandwidth parts (J) in periodic CQI using UE-selected sub-bands System Bandwidth DL
RBN Sub-band Size k (RBs) Bandwidth Parts (J) 6-7 8-10
11-26 27-63 64-110
NA 4 4 6 8
NA 1 2 3 4
Number of resource blocks in the whole system bandwidth, number of resource blocks in a
sub-band (k) and number of selected sub-bands (M) by the UE for the UE selected sub-band feedback CQI reports can be seen in Table 4.
Table 4
Parameters of the aperiodic CQI report for UE-selected sub-bands feedback System Bandwidth (RBs) Sub-band Size k (RBs) Number of preferred sub-bands (M)
6-7 8-10
11-26 27-63 64-110
(Wideband CQI Only) 2 2 3 4
(Wideband CQI Only) 1 3 5 6
The throughput results are compared to the system capacity C of an AWGN channel
calculated according to Shannon capacity: )1(log2 SNRFBC (4)
Here, SNR is the Signal to Noise Ratio, B the bandwidth occupied by the data subcarriers as shown below, and F a correction factor. The bandwidth B is calculated as

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
140
SC S rb
sub
N N NBT
,
where SCN = 12 is the number of subcarriers in one RB, SN is the number of OFDM symbols in one sub-frame (usually equal to fourteen when the normal Cyclic Prefix (CP) is set), rbN is the number of RBs that fit into the selected system bandwidth (for example 6 RBs within a 1.4MHz system bandwidth), and subT is the duration of one sub-frame equal to 1ms.
The transmission of an OFDM signal requires also the transmission of a CP to avoid inter-symbol interference and the reference symbols for channel estimation. Therefore, the well-known Shannon formula is adjusted in (4) by the factor F . This factor F as shown below, accounts thus for the inherent system losses and is calculated as
loss symbol reference
242
SSC
SSC
CPloss
frame
CPframe
NNNN
TTT
F
,
where frameT is the fixed frame duration equal to 10 ms and CPT is the total CP time of all OFDM symbols within one frame [5].
Simulation Results In our article we Simulate the BLER as shown in Figure 7, for example at BLER of 10-2,
PedB CQI 8 Transmit Diversity required SNR of 6 dB while PedA CQI 11 Closed Loop Spatial Multiplexing required SNR of 28 dB. It indicates that PedA CQI 11 Closed Loop Spatial Multiplexing required the highest SNR to achieve the same level of BLER of PedB CQI 8 Transmit Diversity. It can be conclude that, PedA CQI 8 required the less SNR than others and PedA CQI 11 Closed Loop Spatial Multiplexing required the highest SNR than other for BLER of (10^-2). Another example, with respect to SNR, at SNR of 8dB, PedB CQI 8 Transmit Diversity gave a lower BLER compared to others.
Figure 7 – Throughput for comparison CQI 8 and CQI 11 on Transmit Diversity, Open Loop Spatial Multiplexing, Closed Loop Spatial Multiplexing with PedA and PedB
In Figure 8, a, we Simulation the throughput curves are plotted for every CQI value. Here,
HARQ is switched off and no retransmissions are performed. The SNR gap from the achievable capacity is around 2 dB for most of the CQI values. The distance from the capacity curve is increasing with increasing CQI value which is explained by the non-Gaussian QAM constellations. The throughput with AMC is depicted in Figure 8, b for one user that obtains all the available resources. Note that the performance in Figures 8, a and 8, b looks very similar, although a maximum number of three retransmissions are allowed for the simulation in Figure 8, b. The reason for the similar performance is that in an AWGN channel the switching between the modulation and coding schemes can be done perfectly and hardly any retransmissions are required (although allowed if necessary).

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
141
a b
Figure 8 – Throughput performance: without HARQ over an AWGN for individual CQIs (a); with
AMC and HARQ over an AWGN (b)
In Figure 9, we Simulation the data throughput of SISO, 2x1 transmit diversity (TxD), 4x2 transmit diversity, and 4x2 Open Loop Spatial Multiplexing (OLSM) is compared when transmitting over an uncorrelated ITU Pedestrian B channel. In this simulation we set the CQI to a fixed value of seven and the maximum number of HARQ retransmissions to three. The maximum throughput values achieved by the different MIMO schemes in Figure 9 depends on the number of transmit antennas and on the number of data streams (layers). If more transmit antennas are utilized for the transmission, more pilot symbols are inserted in the OFDM frame and thus lower maximum throughput can be achieved. In the case of OLSM, two spatially separated data streams are transmitted thus leading to twice the maximum throughput of the 4x2 TxD system. Note that the results in Figure 9 were obtained without channel adaptive precoding. An additional gain of the TxD schemes can therefore be expected when the PCI is utilized.
Figure 9 – Throughput in the OLSM 4x2, the TxD 4x2, the TxD 2x1, and the SISO system over an uncorrelated ITU Ped B channel
Conclusions The data rate is determined by the chosen MCS and the error rate depends on the MCS and
the prevailing channel quality. A higher order modulation scheme such as 64QAM or 16QAM would allow more bits per modulation symbol allowing a higher data rate and bandwidth efficiency, while at the same time requiring better SINR at the receiver for error-free demodulation. Similarly a high code rate will reduce redundancy at the cost of lower error correction capability. The feedback delay and the time variability of the channel are factors that need to be considered both in the design of a rate adaptive system and in the choice of MIMO and selection of the best scheme according to the channel conditions and feedback delay is determinant for receivers that are able to use different MIMO modes. For BLER, CQI 8 have the lowest BLER than CQI 11. CQI 11 required more higher

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
142
SNR to achieve the same BLER level of CQI 8. So that, even though the 64QAM have better throughput, but it need more higher SNR and produce higher BLER. For channel model, both PedA and PedB produce the same peak throughput. But, they have differences in SNR requirements and BLER produce. PedB seems have better performance than PedA. PedB required least SNR to achieve the peak throughput compared to PedA. PedB also produce the lower BLER than PedA. PedA required more higher SNR to achieve the same BLER level as PedB.
References 1. Rohde & Schwarz, (2010), “UMTS Long Term Evolution (LTE). Technologies Introduction”,
available at: http://pwrk.cachefly.net/rs/fileadmin/customer/downloads/PDF/ UMTS_Eng.pdf (Accessed March, 25, 2014).
2. Dahlman, E., Parkvall, S., Sköld, J., and Beming, P., (2008), 3G Evolution: HSPA and LTE for Mobile Broadband, 2nd ed., Elsevier, Oxford, UK.
3. Sesia, Stefania, Toufik, Issam, and Baker, Matthew, (2011), LTE – The UMTS Long Term Evolution: From Theory to Practice, John Wiley and Sons, The Atrium, Southern Gate, Chichester, West Sussex, UK.
4. Lee, Juho, Han, Jin-Kyu, and Zhang, Jianzhong (Charlie), (2009), “MIMO Technologies in 3GPP LTE and LTE-Advanced”, EURASIP Journal on Wireless Communications and Networking, Volume 2009, pp. 1-10.
5. Mehlführer, C., Caban, S., Wrulich, M., and Rupp, M., (2008), “Joint throughput optimized CQI and precoding weight calculation for MIMO HSDPA”, 2008 42nd Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, 26-29 Oct., 2008, pp. 1320-1325.
Список використаної літератури 1. UMTS Long Term Evolution (LTE). Technologies Introduction [Электронный ресурс] /
Rohde & Schwarz. – 2010. – Режим доступа: http://pwrk.cachefly.net/rs/fileadmin/customer/ downloads/PDF/UMTS_Eng.pdf.
2. Dahlman E. 3G Evolution: HSPA and LTE for Mobile Broadband: монографія / Dahlman E., Parkvall S., Sköld J., Beming P. – Oxford, UK, 2008. – 448 с.
3. Sesia S. The UMTS Long Term Evolution: From Theory to Practice: монографія / Sesia Stefania, Toufik Issam, Baker Matthew. – West Sussex, UK, 2011. – 752 с.
4. Lee Juho. MIMO Technologies in 3GPP LTE and LTE-Advanced / Lee Juho, Han Jin-Kyu, Zhang Jianzhong (Charlie) // EURASIP Journal on Wireless Communications and Networking, Volume 2009. – С. 1-10.
5. Mehlführer, C. Joint throughput optimized CQI and precoding weight calculation for MIMO HSDPA / Mehlführer C., Caban S., Wrulich M., Rupp M. / 2008 42nd Asilomar Conference on Signals, Systems and Computers: матеріали конференції, Pacific Grove, CA, 26-29 Oct., 2008, С. 1320-1325.
Надійшла до редакції: Рецензент: 25.04.2014 д-р техн. наук, доц. Пелішок В.О.
М.М. Климаш, Хайдер Аббас Аль-Заяді, О.А. Лаврів Національний університет «Львівська політехніка» Підвищення пропускної здатності системи LTE з використанням показника якості каналу. У статті запропоновано дослідження ефективності використання ресурсів системи LTE у процесі розподілу пропускної здатності між абонентами. На основі використання показника якості каналу (ПЯК) досягнуто більш плавне завантаження системної ємності. Досліджено вплив систем модуляції та кодування, а також антенних

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
143
систем на пропускну здатність системи LTE. Результати дослідження підтверджено шляхом моделювання. Ключові слова: LTE, ПЯК, підвищення пропускної здатності.
М.М. Клымаш, Хайдер Аббас Аль-Заяди, О.А. Лаврив Национальный университет «Львовская политехника» Повышение пропускной способности в системе LTE с использованием показателя качества канала. В статье исследована производительность нисходящей линии физического уровня LTE с MIMO антеннами и обратной связью в виде индикатора качества канала (ИКК). В статье использованы модели канала пешеходов А и B для нескольких режимов передачи, которыми являются разнесение при передаче пространственного мультиплексирования с открытой петлей и пространственного мультиплексирования с замкнутой петлей. MIMO системы являются существенной частью LTE для достижения требований к пропускной способности и спектральной эффективности. Адаптивные схемы передачи, которые регулируют параметры передачи по отношению к нестационарным каналам, обеспечивают надежные и спектрально эффективные коммуникации. В этой статье исследован ИКК с использованием для передачи данных обратной связи; рассмотрены системы пространственного мультиплексирования с открытой петлей и замкнутой петлей с использованием MIMO. Ключевые слова: LTE, ИКК, повышение пропускной способности.
Mykhailo Klymash received his PhD in Telecommunications from the St. Petersburg State University of Telecommunications, named after Bonch-Brujevich, in 1993; and Habilitation in Telecommunication Systems and Networks from the Odessa National Academy of Telecommunications, named after O.S. Popov, in 2007. He is a Professor and the Head of the Telecommunications Department at the Lviv Polytechnic National University, Lviv. His researches interests are transport networks, mobile networks and services, and distributed networked architectures modeling.
Haider Abbas Al-Zayadi is a postgraduate at the Telecommunications Department, Lviv Polytechnic National University, Lviv, Ukraine. He received his Master degree in Telecommunication Systems and Networks from Kharkiv National University of Radioelectronics, Kharkiv, Ukraine. His researches interests include wireless communication systems, user experience ensuring for LTE systems.
Orest Lavriv is an Assistant Lecturer at the Telecommunications Department, Lviv Polytechnic National University, Lviv, Ukraine. He received his Master and PhD in Telecommunication Systems and Networks from Lviv Polytechnic National University, Lviv, Ukraine. His researches interests include service ensuring, routing and QoS.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
© Мірошкін О.М., 2014 144
УДК 004.3
О.М. Мірошкін (канд. техн. наук) ДВНЗ «Донецький національний технічний університет», м. Донецьк
кафедра комп’ютерної інженерії e-mail: [email protected]
МОДИФІКАЦІЯ СИСТЕМИ АДРЕСАЦІЇ МІКРОКОМАНД У ПРИСТРОЇ КЕРУВАННЯ ПРИ ЙОГО РЕАЛІЗАЦІЇ У БАЗИСІ ГІБРИДНИХ FPGA
У статті запропонований метод синтезу композиційного мікропрограмного пристрою керування для реалізації його у базисі гібридних FPGA. Метод базується на використанні псевдоеквівалентних операторних лінійних ланцюгів, при використанні яких у якості джерела адреси для наступної мікрокоманди зменшується складність схеми формування відповідних функцій. У статті приведені математичне обґрунтування доцільності використання методу синтезу та опис основних етапів процесу синтезу пристрою керування, а також розглянутий приклад синтезу для тестової граф-схеми алгоритму керування. Ключові слова: композиційний мікропрограмний пристрій керування, гібридна FPGA, псевдоеквівалентні операторні лінійні ланцюги, LUT-елемент, зменшення апаратурних витрат.
Вступ Згідно з принципом мікропрограмного керування, будь-яка обробка інформаційного
слова, що виконується у обчислювальному пристрої, реалізується за допомогою виконання послідовності елементарних дій, які називаються мікроопераціями. Пристрій керування, який є складовою частиною обчислювального пристрою, формує відповідну розподілену у часі послідовність керуючих сигналів, під впливом яких виконуються мікрооперації. Для інтерпретації алгоритмів керування, які містять більше, ніж 75 % операторних вершин, доцільно використовувати композиційний мікропрограмний пристрій керування (КМПК) [1, 2]. Для реалізації схеми КМПК може бути використаний базис програмованих логічних інтегральних схем (ПЛІС) типу гібридних FPGA (field-programmable gate arrays) [5, 6]. Такі ПЛІС містять як елементи табличного типу (LUT, look-up table), так і вбудовані блоки програмованих логічних матриць (PLA, programmable logic array), але не містять блоків вбудованої пам’яті, які зазвичай використовуються для формування мікрооперацій [8]. Оскільки висока складність схеми формування адреси мікрокоманди потребує великої кількості апаратурних витрат для її реалізації та призводить у більшості випадків до збільшення часу формування адреси, актуальним є питання зменшення складності зазначеної схеми. У статті запропонована модифікація методу синтезу КМПК, яка враховує особливості базису гібридних FPGA та використовує підходи до адресації мікрокоманд, запропоновані у роботах [9, 10].
Метою дослідження є зменшення апаратурних витрат у комбінаційній частині КМПК при його реалізації в базисі гібридних FPGA за рахунок введення до формату мікрокоманд кодів класів псевдоеквівалентних операторних лінійних ланцюгів (ПОЛЛ). Задачею дослідження є розробка методу синтезу схеми КМПК, який дозволить зменшити кількість макрокомірок програмованих логічних матриць, що входять до складу мікросхеми гібридної FPGA.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
145
Особливості КМПК із загальною пам’яттю Алгоритм керування для синтезу керуючого пристрою задається у вигляді граф-схеми
алгоритму (ГСА) [3], яка складається з множини вершин B = {b0, bE} B1 B2 та множини дуг E. Початкова вершина ГСА позначена як b0, кінцева – як bE, через B1 та B2 позначені множини операторних та умовних вершин відповідно. Кожна операторна вершина bq {b0, bE} містить набір мікрооперацій Y(bq) Y, де Y = {y1, …, yN} – множина сигналів мікроперацій, що формується пристроєм керування. Умовна вершина bp містить один елемент з множини логічних умов X = {x1, …, xL}. Операторним лінійним ланцюгом (ОЛЛ) називається послідовність операторних вершин ГСА, які поєднані між собою дугами з множини E. Кожна ОЛЛ має довільну кількість входів та рівно один вихід. Формальне визначення ОЛЛ, їх входів та виходів наведено в роботі [2]. Зазначимо, що кожна операторна вершина bq {b0, bE} відповідає мікрокоманді MIq, яка зберігається у керуючій пам’яті (КП) за адресою A(bq). Розрядність адреси КП залежить від кількості мікроперацій, які необхідно зберігати, і визначається за формулою R = log2(M), (1) де M – загальна кількість операторних вершин, (M = |B1|). Для кодування розрядів адреси використовуються змінні T = (T1, …, TR). Кожна ОЛЛ g складається з Fg компонент та приймає участь у формуванні множини C = {1, …, G}. Для забезпечення можливості використання лічильника ЛАМК операторним вершинам bq необхідно призначити коди у природний спосіб, тобто: A[(bq)i] = A[(bq)i-1] + 1, (2) де g = 1, …, G, i = 1, …, Fg.
Структурна схема КМПК із загальною пам’яттю містить схему формування адреси (СФА), лічильник адреси мікрокоманд (ЛАМК) та керуючу пам’ять (КП), яка містить мікропрограму, що інтерпретується (рис. 1).
Рисунок 1 - Структурна схема КМПК
Схема формування адреси використовується для формування функцій збудження пам’яті Ф лічильника ЛАМК: Ф = Ф(T, X). (3)
Лічильник ЛАМК реалізує наступну систему:

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
146
.00,;10,1
yifyifT
T (4)
Функціонування КМПК відбувається наступним чином. За сигналом Start до ЛАМК заноситься початкова адреса мікропрограми, а тригер вибірки формує сигнал Fetch = 1, який дозволяє вибірку команд з КП. Якщо поточна мікрокоманда не відповідає виходу ОЛЛ, то одночасно з мікроопераціями Y(bq) формується сигнал y0 = 1, за яким до ЛАМК додається одиниця (формується адреса наступної компоненти поточної ОЛЛ). Під час вибірки мікрокоманди, що відповідає вершині-виходу ОЛЛ, сигнал y0 не формується, тому до ЛАМК завантажується адреса, яка формується блоком СФА. Якщо досягнута остання мікрокоманда алгоритму, формується сигнал yE, який зупиняє вибірку мікрокоманд з КП.
Кількість термів у блоку СФА може бути зменшено шляхом введення перетворювача кодів ОЛЛ до кодів класів псевдоеквівалентних ОЛЛ (ПОЛЛ) [2]. ОЛЛ називають псевдоеквівалентними у тому випадку, коли їх виходи пов’язані зі входом однієї й тієї ж вершини алгоритму. Однак використання такого перетворювача вимагає додаткових апаратурних витрат. Метод синтезу, що пропонується, спрямований на зменшення апаратурних витрат в схемі формування адреси.
Основна ідея методу, що пропонується Сформуємо множину С1 = С\e, де C = {1, …, G} – загальна множина ОЛЛ, e –
позначення всіх ОЛЛ, виходи яких з’єднані зі входом кінцевої вершини ГСА bE дугою з множини E. Знайдемо розбиття ПC = {B1, …, BI} множини С1 на класи ПОЛЛ. Кожному елементу Bi ПC. Призначимо код K(Bi) розрядності RI, яка визначається за формулою RI = log2(I). (5)
В роботах [9, 10] пропонується ввести до формату мікрокоманд поле K(Bi), вміст якого буде використовуватись блоком СФА як джерело коду для формування адреси наступної мікрокоманди. Однак, через відсутність вбудованих блоків пам’яті у гібридних FPGA, для реалізації КП пропонується використовувати LUT-елементи, які являють собою блок пам’яті з SL входами та одним виходом. За умови виконання відношення SL R (6) можливе використання структури КМПК із зв’язком Z замість зв’язку T (рис. 1). У такій структурі КМПК схема формування адреси реалізується за допомогою блоків PLA, а схема КП – із використанням сукупності LUT-елементів. Блок ЛАМК також реалізується за допомогою LUT-елементів.
Для кодування класів Bi ПC використовуються змінні Z = {z1, …, zRI}. Блок САМ реалізує функцію Ф = Ф(Z, X), (7) а до функцій, які реалізує блок КП, належать наступні: Y = Y(T); (8) Z = Z(T); (9) y0 = y0(T); (10) yE = yE(T). (11)
Метод синтезу запропонованої структури КМПК включає наступні етапи: 1. Формування множин C, C1, ПС для ГСА керування. 2. Кодування компонент ОЛЛ та класів Bi ПC. 3. Формування функцій (8)-(11). 4. Формування таблиці СФА. 5. Синтез схеми КМПК. Приклад застосування запропонованого методу Нехай алгоритм керування заданий у вигляді граф-схеми Г1, яка приведена на рис. 2.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
147
Рисунок 2 - Граф-схема Г1 алгоритму керування
Граф-схема Г1 характеризується множинами С = {1, …, 7} та С1 = С\5. Всі ОЛЛ i C1 формують класи B = {B1, …, B4}, де B1={1}, B2={2, 6, 7}, B3 = {3}, B4 = {4}, при цьому 1 = <b1, b2>, 2 = <b3, b4>, 3 = <b5, b6, b7, b8>, 4 = <b9>, 5 = <b10, b11, b12, b13>, 6 = <b14, b15, b16>, 7 = <b17, b18, b19>. Отже, кількість вершин ГСА Г1 дорівнює M = 20, що потребує адреси з R = 5 розрядів для відповідних мікрокоманд. Кількість ОЛЛ G = 7, які формують класи ПОЛЛ Bi ПС у кількості I = 4. Для кодування відповідних класів достатньо RI = 2 змінні, які формують множину Z = {z1, z2}.
Призначимо мікрокомандам КМПК адреси, які відповідають двійковому представленню індексів вершин bi ГСА Г1, тобто A(b0) = 00000, A(b1) = 00001, …, A(b19) = 10011. Таке призначення адрес дозволяє задовольнити відношенню (2).
Мікрокоманда КМПК складається з полів FY, yE, y0, FB, де поле FY містить інформацію для формування сигналів керування yk, а поле FB – код класу Bi ПС, який використовується схемою формування адреси під час переходів між мікрокомандами, які відповідають вершинам ГСА Г1 з різних ОЛЛ.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
148
Вміст та розміри поля FY мікрокоманди залежать від обраної стратегії кодування мікрооперацій. При формуванні вмісту мікрокоманд до поля y0 записується «1», якщо вершина не є останньою у поточній ОЛЛ, у протилежному випадку поле y0 містить «0», а до поля FB необхідно занести код поточного класу ПОЛЛ. Фрагмент вмісту керуючої пам’яті КМПК для ГСА Г1 наведений у табл. 1.
Таблиця 1
Фрагмент вмісту керуючої пам’яті КМПК для ГСА Г1 Адреса FY y0 yE FB 00000 – 1 0 * 00001 y1, y2, y3 1 0 * 00010 y2, y4, y5, y6 0 0 00 00011 y1, y3 1 0 * 00100 y1, y4, y6 0 0 01 00101 y3, y5 1 0 *
… … … … … 01100 y2, y5 1 0 * 01101 y1, y4, y6 * 1 * 01110 y4, y6 1 0 * 01111 y2, y5 1 0 * 10000 y1, y4 0 0 10 10001 y2, y3, y4, y6 1 0 * 10010 y2, y3, y5 1 0 * 10011 y1, y3, y4, y6 0 0 10
У табл. 2 вміст поля FY наведений у символьному вигляді. Перехід до двійкових
значень виконується за допомогою обраної стратегії кодування операційної частини, огляд яких до цієї статті не належить.
Формули для переходів отримаємо з ГСА Г1:
.;
;;
74
174314431033
82
921521311
bBbxxbxxbxB
bBbxxbxxbxB
(12)
Подібна система є основою для формування таблиці зі стовпцями Bi, K(Bi), bq, A(bq), Xh, h, h. Призначення стовпців стає ясним з табл. 3, яка задає переходи для класів B1,2 ПС.
Таблиця 2
Фрагмент таблиці формування СФА КМПК Bi K(Bi) bq A(bq) Xh h h
b3 00011 1x D4, D5 1 b5 00101 21 xx D3, D5 2 B1 00 b9 01001 21xx D2, D5 3
B2 01 b8 01000 1 D2 4
Загальна кількість строк табл. 2 співпадає з кількістю термів в системі узагальнених формул переходів (12). Для нашого прикладу ця кількість дорівнює значенню 8.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
149
Система (7) формується за таблицею переходів. Так, з табл. 2 можна побудувати фрагменти ДНФ, які реалізуються у схемі формування адреси:
.;
;;
01521013
10140121012
zzDxxzzDxzzDzzxxzzD
(13)
При виконанні умов
,;
;
HqRt
RLS (14)
схема формування адреси тривіальним чином може бути реалізована у базисі однієї макрокомірки PLA. Якщо хоча б одне з відношень системи (14) порушується, необхідні декілька макрокомірок. Для зменшення кількості макрокомірок PLA в схемі формування адреси можна використовувати відомі методи [11].
При виконанні умови (6) кожна функція з систем (8)–(11) реалізується на однім елементі LUT. Таке рішення є оптимальним. При цьому таблиця вмісту керуючої пам’яті розглядається як таблиця істинності відповідних функцій.
Висновки Запропонований метод розширення формату мікрокоманд за рахунок введення поля з
кодом класу ПОЛЛ орієнтований на зменшення кількості макрокомірок PLA у схемі формування адрес мікрокоманд. При цьому тривалість інтерпретації алгоритму керування не збільшується.
Зменшення кількості термів у ДНФ функцій збудження пам’яті може привести до зменшенню кількості рівнів в комбінаційній частині КМПК. Це у свою чергу призводить до збільшення швидкодії цифрової системи в цілому. Розглянути приклад показав, що кількість макрокомірок у схемі КМПК завдяки використанню запропонованого підходу була зменшена на 30 % у порівнянні зі схемою КМПК базової структури.
Наукова новизна запропонованого методу полягає у використанні кодів класів ПОЛЛ для зменшення кількості макрокомірок PLA у схемі адресації мікрокоманд при реалізації композиційного мікропрограмного пристрою керування у базисі гібридних FPGA. Практична значимість метода полягає у зменшенні кількості макрокомірок при реалізації схеми КМПК, що дозволяє отримати більш дешеві схеми у порівнянні із аналогами.
Подальші напрямки досліджень пов’язані з розробкою методів зменшення кількості макрокомірок для тих випадків, коли відношення з системи (14) порушуються.
Список використаної літератури 1. Barkalov A., Titarenko L. Logic Synthesis for Compositional Microprogram Control Unit –
Berlin: Springer, 2008. – 272 pp. 2. Synthesis of compositional microprogram control unit with dedicated area of inputs / Alexander
Barkalov, Larysa Titarenko, Jacek Bieganowski, A.N. Miroshkin // W: Design of digital systems and devices / eds M. Adamski, A. Barkalov, M. Wegrzyn. – Berlin: Springer-Verlag, 2011. (Lecture Notes in Electrical Engineering; 79) – pp. 193–214.
3. Баркалов А.А. Синтез устройств управления на программируемых логических устройствах / А.А. Баркалов. – Донецк: ДНТУ, 2002 – 262 с.
4. Соловьев В.В. Проектирование цифровых схем на основе программируемых логических интегральных схем / В.В. Соловьев. – М.: Горячая линия-ТЕЛЕКОМ, 2001. – 636 с.
5. Kabiani A., Brown S. The Hybrid Field Programmable Architecture. – IEEE Design & Test of Computers. – 1999, V.16, №4. – pp. 74–83.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
150
6. Singh, S.K., Singh, R.K. Design flow of reconfigurable embedded system architecture using LUTs/PLAs. 2nd IEEE International Conference on Parallel Distributed and Grid Computing (PDGC), 6-8 Dec. 2012, pp. 385–390. ISBN 978-1-4673-2922-4.
7. Altera Corporation APEX20K PLD Family Data Sheet (2004) [Электронный ресурс]. – Режим доступа: www.altera.com/literature/ds/apex.pdf .
8. Баркалов А.А. Синтез композиционных микропрограммных устройств управления / А.А. Баркалов, Л.А. Титаренко. – Харьков: Коллегиум, 2007. – 302 с.
9. Баркалов А.А. Расширение формата микрокоманд в микропрограммном устройстве управления с разделением кодов / А.А. Баркалов, Л.А. Титаренко, А.Н. Мирошкин // Радиоэлектроника и информатика. - 2008. - № 2 (41). – С. 40-45.
10. Баркалов А.А. Расширение формата микрокоманд в композиционном микропрограммном устройстве управления с элементаризацией операторных линейных цепей / А.А. Баркалов, А.А. Красичков, А.Н. Мирошкин // Радіоелектрон. і комп'ют. системи. – 2010. – N 7. – С. 301–305.
11. Баранов С.И. Цифровые устройства на проектируемых БИС с матричной структурой / С.И. Баранов, В.А. Скляров. – М.: Радио и связь, 1986. – 272 с.
References 1. Barkalov, A. and Titarenko, L. (2008), Logic Synthesis for Compositional Microprogram
Control Unit, Springer, Berlin, Germany. 2. Barkalov, L., Titarenko, J.B. and Miroshkin, A.N. (2011), “Synthesis of compositional
microprogram control unit with dedicated area of inputs”, in Adamski, M, Barkalov, A. and Wegrzyn, W. (ed.) Design of digital systems and devices, Springer-Verlag, Berlin, Germany, pp. 193–214.
3. Barkalov, A.A. (2002), Sintez ustrojstv upravleniya na programmiruemyx logicheskix ustrojstvax, DNTU, Doneck, Ukraine.
4. Solov'ev, V.V. (2001), Proektirovanie cifrovyx sxem na osnove programmiruemyx logicheskix integral'nyx sxem, Goryachaya liniya-TELEKOM, Moscow, Russia .
5. Kabiani A., Brown S. The Hybrid Field Programmable Architecture. – IEEE Design & Test of Computers. – 1999, V.16, №4. – pp. 74–83.
6. Singh, S.K. and Singh, R.K. (2012), “Design flow of reconfigurable embedded system architecture using LUTs/PLAs”, 2nd IEEE International Conference on Parallel Distributed and Grid Computing (PDGC), 6-8 Dec. 2012, pp. 385–390.
7. Altera Corporation APEX20K PLD Family Data Sheet (2004), available at: http://www.altera.com/literature/ds/apex.pdf (Accessed 26 March 2014).
8. Barkalov, A.A. and Titarenko, L.A. (2007), Sintez kompozicionnyx mikroprogrammnyx ustrojstv upravleniya, Kollegium, Xar'kov , Ukraine.
9. Barkalov, A.A., Titarenko, L.A. and Miroshkin, A.N. (2008), “Rasshirenie formata mikrokomand v mikroprogrammnom ustrojstve upravleniya s razdeleniem kodov”, Radioe'lektronika i informatika, no. № 2 (41), pp. 40-45.
10. Barkalov, A.A., Krasichkov, A.A. and Miroshkin, A.N. (2010), “Rasshirenie formata mikrokomand v kompozicionnom mikroprogrammnom ustrojstve upravleniya s e'lementarizaciej operatornyx linejnyx cepej”, Radіoelektron. і komp'yut. Sistemi, no. 7, pp. 301–305.
11. Baranov, S.I. and Sklyarov, V.A. (1986), Cifrovye ustrojstva na proektiruemyx BIS s matrichnoj strukturoj, Radio i svyaz', Moscow, USSR.
Надійшла до редакції Рецензент 26.03.2014 д-р техн. наук, проф. Скобцов Ю.О.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
151
А.Н. Мирошкин ГВУЗ «Донецкий национальный технический университет» Модификация системы адресации микрокоманд в устройстве управления при его реализации в базисе гибридных FPGA. В статье предлагается метод синтеза композиционного микропрограммного устройства управления для его реализации в базисе гибридных FPGA. Метод основан на использовании псевдоэквивалентных операторных линейных цепей в качестве источника адреса для следующей микрокоманды, благодаря чему уменьшается сложность схемы формирования соответствующих функций. В статье приведены математическое обоснование целесообразности применения метода синтеза и описание основных этапов процесса синтеза устройства управления, а также рассмотрен пример применения предлагаемого метода синтеза для интерпретации тестовой граф-схемы алгоритма управления. Ключевые слова: композиционное микропрограммное устройство управления, гибридная FPGA, псевдоэквивалентная операторная линейная цепь, LUT-элемент, уменьшение аппаратурных затрат.
A.N. Miroshkin Donetsk National Technical University Modification of microinstruction addressing system for control unit implementation in hybrid FPGA. During interpretation of a control algorithm with a little number of conditional shapes a compositional microprogram control unit can be effectively used. Such device circuit includes a combinational part for the next microinstruction address formation, as well as a memory unit for output control signals generating. During interpretation of a large algorithms, complexity of the address formation unit is greatly increased, so hardware cost is increasing, as well as time delays are increasing during the microinstruction address formation. A synthesis method for compositional microprogram control unit realization in hybrid FPGA basis (which contain both look-up table elements and PLA macrocells) is proposed in the article. Combination part of the control unit is implemented using macrocells of PLA, and for output control signals generating LUT-elements are used. The proposed synthesis method is based on the usage of pseudoequivalent operational linear chains as the source for the next microinstruction address formation, thereby reducing the complexity of the corresponding functions formation unit. The paper presents a mathematical justification of the synthesis method appropriateness and the basic stages of the control units synthesis process, as well as an example of the synthesis method application for the interpretation of the test-chart of the control algorithm is proposed. Research showed up to 30 % of hardware resource decreasing in comparison to base control unit implementation for the same algorithm during the proposed approach realization. The number of cycles required for the control algorithm interpretation is still the same. Thus the memory excitation functions simplification leads to levels number reducing in combination part of the control unit circuit, thereby the clock period of the device can be reduced. Keywords: compositional microprogram control unit, hybrid FPGA, pseudoequivalent operational linear chains, LUT-element, hardware costs reducing.
Мірошкін Олександр Миколайович, Україна, закінчив Донецький національний технічний університет, канд. техн. наук, доцент кафедри комп’ютерної інженерії ДВНЗ «Донецький національний технічний університет» (вул. Артема, 58, м. Донецьк, 83001, Україна). Основні напрямки наукової діяльності – проектування пристроїв керування у базисі сучасних великих інтегральних схем.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
© Молоковский И.А., 2014 152
УДК 621.391
И.А. Молоковский (канд. техн. наук) ГВУЗ «Донецкий национальный технический университет», г. Донецк
кафедра автоматики и телекоммуникаций e-mail: [email protected]
МОДЕЛИРОВАНИЕ ПРОЦЕССОВ РАСПРОСТРАНЕНИЯ РАДИОВОЛН В ПОДЗЕМНОЙ ЧАСТИ УГЛЕДОБЫВАЮЩЕГО ПРЕДПРИЯТИЯ
В статье рассмотрена и проанализирована математическая модель распространения радиоволн в условиях ограниченного пространства, что характерно для подземной части угледобывающего предприятия. Данная математическая модель основана на использовании параметров боковых стен, потолка и пола угольной выработки, что позволяет учесть три вида потерь: потери преломления, потери из-за рассеивания и потери из-за разного угла наклона стен. На основе разработанной математической модели, было произведено моделирование распространения радиосигнала. Ключевые слова: модель, радиоволна, потери, преломление.
Актуальность проблемы В подземной части угледобывающего предприятия, как и на многих других
промышленных предприятиях, используются различные технологические системы связи [1]. Соответствующие системы в пределах подземных выработок, на поверхности угледобывающего предприятия, а также между подземными рабочими станциями являются жизненно важной частью правильного функционирования любого подземного средства связи. Отлаженная работа технологических систем [3,4,11], которая зависит от качества переданного сигнала и от скорости его доставки, вносит важный фактор в концепцию безопасности отрасли в целом. Именно для оптимизации этих параметров необходимо детально изучить вопросы распространения радиоволн в подземной части угледобывающего предприятия.
Постановка задачи Данная статья должна представлять математическую модель распространения
радиоволны в больших поперечных выработках подземной части угледобывающего предприятия, а так же описывать анализ распространения не большого объема данных в таких условиях. Предлагаемая модель основана на теории распространение мод волны в волноводе, разработанной ранее для передачи СВЧ волн в выработках подземной части угледобывающего предприятия, с учетом потерь из-за преломления волны об стенки туннеля, а так же рассеивания на неровностях стены и случайного наклона [2,7,9].
Основная часть Рассматривается два типа тоннелей в шахте. Один из них является тоннелем с
ленточным конвейером, размер такого тоннеля 6х3 метра. Соседний тоннель больших размеров 13х10 метров. В наших расчетах мы будем учитывать три вида потерь [5]:
- потери преломления; - потери рассеивания из-за неровностей стены; - потери из-за разного наклона стен относительно которых распространяются волны. При расчете этих потерь используем волновую теорию и теорию излучения. Первая
составляющая – потери на преломлении. Каждая мода в туннели может быть описана, как пучок параллельных лучей отражающихся от всех четырех стены туннеля. Угол скольжения волны рассчитывается по формулам (1) и (2) [10]:

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
153
1
11 2d
n , (1)
2
22 2d
n , (2)
где индекс 1 относится к боковым стенкам; индекс 2 относится к потолку и полу; n1 и n2 – горизонтальные и вертикальные моды соответственно; d1 и d2 являются размерами горизонтального и вертикального тоннеля соответственно; λ – длина волны в свободном пространстве.
Выражения (1) и (2) являются условиями для фазовой когерентности из-за многократного отражения лучей друг с другом.
Потери мощности на расстояние g рассчитываются через g1 и g2:
21 ggg , (3) где g1 – коэффициент потери мощности на отражении для боковых стенок;
g2 – коэффициент потери мощности на отражении для крыши и пола.
1)( 11NFRg , (4)
222
NRg , (5) где F – эффективная поверхность отражения на боковых стенках обозначается;
N1, N2 – количество отражений лучей на расстоянии z. Значение N1, N2 определяется из зависимости:
111 /)( dzN , (6)
222 /)( dzN . (7) Мощность отражения R1 и R2 рассчитываются через формулы Френеля:
2
211
211
,1)1(
)1(
KK
KKR h
, (8)
2
222
222
,2)1(
)1(
K
KR h
, (9)
2
211
211
,1)1(
)1(
K
KR v
, (10)
2
222
222
,2)1(
)1(
KK
KKR v
. (11)
где K – диэлектрическая константа для материала, из которого сделаны стены;
h и v – вертикальная и горизонтальная поляризация соответственно.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
154
Скорость затухания ref вычисляется исходя из выражения:
zg
ref10log10
100 . (12)
)(log
2)(log
21000 2102
2
21102
1
1 Rd
nFRd
nref
. (13)
Потери рассеивания из-за неровностей стены. Предполагаем, что стенки туннели
неровные. С помощью гауссовского распределения описываем амплитуду неровности стены, через среднеквадратическое отклонение из h. Мощность потерь на отражении получается из формулы (14) и (15):
1sin22
1
h
eg , (14) 2
2sin22
2
h
eg . (15)
Рассмотрим 1 и 2 как небольшие значения угла, мы находим из (1), (2), (3), (6) и (7) скорость затухания αref равна:
4
2
32
41
31223,434
dn
nnhroug . (16)
Угловые потери. Вместо расчета угловых потерь для фиксированного угла θо, мы
рассмотрим для большого диапазона значений наклона используя Гауссовское распределением со среднеквадратическим отклонением θо. Для конкретного отражения от боковых стенок, где угол наклона равен θ, отражающий луч наклонен под углом 21 относительно стены. Электрическое поле рассчитывается следующих образом:
)2sin()2cos( 11' xzik
ooeEЕ (17)
в то время как значение электрического поля для мод составляет:
110 sincos xZik
oeEE (18) где /20 k .
Коэффициент мощности связь Е' обратно через моде Е задается через нормированный интеграл перекрытия:
)|'|)(||(|'|
)( 22
2
1dxdyEdxdyE
dxdyEEg , (19)
где интегрирование происходит по перечному сечению тоннеля.
Для маленьких величин θ и 1 (17) получаем:

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
155
2
10
101
sin)(
dkdkg
, (20)
аналогично: 2
20
202
sin)(
dkdkg
. (21)
Теперь введем статистику с помощью Гауссово весового коэффициента:
20
2 2/
0 21)(
ep . (22)
Затем
)()()(11 dpgg , (23)
)()()(22 dpgg . (24)
Чтобы избежать численного интегрирования, воспользуемся аппроксимацией:
3/2
2sin xex
x
, (25)
получим для (21) и (22) приблизительные значения:
2/1210
12
321
1
d
g , (26)
2/1220
22
321
1
d
g . (27)
Угловые потери рассчитываем затем через (1), (2) и (3):
21022
21102
1
1 log500
log500 g
dng
dn
sum
, (28)
где все расстояния в метрах, а αsum в db/30 метров.
На основание вышеприведенной математической модели произведено моделирования распространения радиоволн в условиях ограниченного пространства в подземной части угледобывающего предприятия.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
156
Рисунок 1 – Зависимость общего затухания для горизонтальной поляризации от частоты сигнала
Рисунок 2 – Зависимость общего затухания для вертикальной поляризации от частоты сигнала
Рисунок 3 – Зависимость дальности распространения сигнала от частоты
Выводы В статье рассмотрена и проанализирована математическая модель распространения
радиоволн в условиях ограниченного пространства, что характерно для подземной части угледобывающего предприятия. Данная математическая модель основана на использовании параметров боковых стен, потолка и пола угольной выработки, что позволяет учесть три вида потерь: потери преломления, потери из-за рассеивания и потери из-за разного угла

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
157
наклона стен. Важным критерием является учет горизонтальных и вертикальных мод, а также учет влияния размеров горизонтальной и вертикальной выработки. Математическая модель позволяет также рассчитать общее затухание. На основе общего затухания и производится расчет максимальной дальности распространение радиосигнала в зависимости от длина волны радиосигнала, который распространяется в свободном пространстве.
На основание разработанной математической модели, было произведено моделирование распространение радиосигнала. На рисунках 1 и 2 представлены зависимости затухания от различных частот для вертикальной и горизонтальной поляризаций. Как и предполагалось – вертикальная поляризация более подвержена влиянию затухания. На рисунке 3 представлена зависимость дальности распространения сигнала от частоты, так как, при большей частоте затухания меньше, то дальность распространения при этом получаем больше. Предложенная модель может быть внедрена в аппаратно-программный комплекс, который был описан в [8].
Список использованной литературы 1. Молоковський І.О. Аналіз систем промислового зв’язку / І.О. Молоковський;
Національна Академія наук України. Інститут проблем моделювання в енергетиці // Збірник наукових праць "Моделювання та інформаційні технології". – 2009. – Випуск 52. – С. 157-160.
2. Молоковский И.А. Влияние окружающей среды на передачу радиосигналов в промышленных телекоммуникационных системах / И.А. Молоковский // Матеріали VIII Міжнародної науково-технічної конференції «Сучасні інформаційно-комунікаційні технології». - Лівадія: ДУІКТ, 2012. – С. 147-149.
3. Турупалов В.В. Информационная система обеспечения безопасности промышленных предприятий / В.В. Турупалов // Науковий вісник Чернівецького університету «Комп’ютерні системи та компоненти. Збірник наукових праць. - 2012. – Т.3, Випуск 2. – С. 65-68.
4. Турупалов В.В. Роль телекомунікаційних технологій у системах автоматизації підприємств гірничого-добувного комплексу / В.В. Турупалов // Научно-теоретический журнал «Искусственный интеллект». - 2012. - №4. - С. 516 - 521.
5. Турупалов В.В. Повышение надежности технологических сетей связи / В.В. Турупалов, И.А. Молоковский // Сучасні інформаційно-комунікаційні технології: VII Міжнародна науково-технічна конференція: збірник тез. - К., 2011. - С. 152–154.
6. Турупалов В.В. Спеціалізована телекомунікаційна мережа в системі управління вугільною шахтою / В.В. Турупалов, Р.В. Федюн, В.О. Попов // 11-я международная конференция по автоматическому управлению [«Автоматика-2004»], (27–30 сентября 2004 г.): тези докл. – К, 2004. - Т. 4. - С. 113.
7. Молоковский И.А. Исследование возможности передачи информации с помощью беспроводных технологий в телекоммуникационных сетях промышленных предприятий / И.А. Молоковский // Сборник научных трудов Донецкого национального технического университета, серия: «Вычислительная техника и автоматизация-2010». – 2010. – Выпуск 19 (171). – С. 77-82.
8. Молоковский И.А. Программный комплекс определения местоположения мобильных объектов / И.А. Молоковский // Науковий вісник Чернівецького національного університету ім. Юрія Федьковича. Серія: Комп’ютерні системи та компоненти. – 2013. – Т. 4, Випуск 3. – С. 113-118.
9. Молоковский И.А. Исследование особенностей проектирования систем связи с использованием излучающего кабеля / И.А. Молоковский // Наукові праці Донецького інституту залізничного транспорту Української державної академії залізничного транспорту. – 2013. – Випуск 36. – С. 90-96.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
158
10. Савкин М.М. Распространение радиоволн в горных выработках / М.М. Савкин // Радиосвязь и высокочастотная телемеханика в горной промышленности: сб. науч. тр. СО АН СССР. – Новосибирск, 1964. – С. 7–38.
11. Вовна А.В. Разработка математической модели измерительного контроля концентрации пыли в газах теплоэлектростанции / А.В. Вовна, А.А. Дробот // Збірник наукових праць ХIІІ Міжнародної науково-технічної конференції аспірантів і студентів «Автоматизація технологічних об’єктів та процесів. Пошук молодих». – Донецьк, 2013. – С. 393 – 397.
References 1. Molokovskiy, I.O. (2009), “Analysis of systems of industrial networks”, National Academy of
Sciences of Ukraine. Simulation and informational technologies. Collection of scientific works, vol. 52, pp. 157–160.
2. Molokovskiy, I.A. (2011), “Effect of the environment on a radio propagation in industrial network”, 8 th International Conference for New Generation Networks and Telecommunication Problems, State University for IT and Telecommunication DUIKT, Lіvadіa, Ukraine, pp. 147–149.
3. Turupalov, V.V. (2012), “Telecommunications system to ensure safety in mines”, Scientific Bulletin of Chernivtsi University. Coll. sciences. Ave Series: Computer Systems and Components, vol. 3, no. 2, pp. 65–68.
4. Turupalov, V.V. (2012), “The role of communication technologies in systems of automation of mining complex”, Scientific-theoretical magazine "Artificial intelligence", vol. 4, pp. 516–521.
5. Turupalov, V.V. and Molokovskiy, I.A. (2011), “Improving the reliability of technological networks”, 5 th International Conference for New Generation Networks and Telecommunication Problems, State University for IT and Telecommunication DUIKT, Lіvadіa, Ukraine, pp. 152–154.
6. Turupalov, V.V., Fedjun, R.V. and Popov, V.O. (2004) “Special telecommunication network management system of coal mine” AUTOMATICS-2004: 11- International Conference on Automatic Control, 4-5October 1999, Kiev, pp. 113.
7. Molokovskiy, I.О. (2010), “Investigation of the possibility of information transmission using the wireless technologies in industrial networks”, Collection of scientific works of Donetsk National Technical University, vol. 19(171), pp. 77–82.
8. Molokovskiy, I.О. (2013), “The software product of mobile object localization in industrial networks”, Scientific Bulletin of Chernivtsi University. Coll. sciences. Ave Series: Computer Systems and Components, vol. 4, no. 3, pp. 113–118.
9. Molokovskiy, I.О. (2013), “Research communication system with coaxial cable”, Collection of scientific works of Donetsk Railway Transport Institute, vol. 36, pp. 90–96.
10. Savkin, M.M. (1964), “Radio propagation in mines”, Radiosvjaz' i vysokochastotnaja telemehanika v gornoj promyshlennosti: sb. nauch. tr. / SO AN SSSR, pp. 7-38.
11. Vovna, A.V. and Drobot, A.A. (2013), “Develop a mathematical model of the measuring control dust concentration in gases power plants”, Zbіrnik naukovih prac' HIІІ Mіzhnarodnoї naukovo-tehnіchnoї konferencії aspіrantіv і studentіv «Avtomatizacіja tehnologіchnih ob’єktіv ta procesіv. Poshuk molodih, pp.393-397.
Надійшла до редакції Рецензент: 25.04.2014 д-р техн. наук, проф. Скобцов Ю.О.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
159
І.О. Молоковський ДВНЗ «Донецький національний технічний університет» Моделювання процесу поширення радіохвиль в підземній частині вугледобувних підприємств. У статті розглянута і проаналізована математична модель розповсюдження радіохвиль в умовах обмеженого простору, що характерно для підземної частини вугледобувного підприємства. Дана математична модель заснована на використанні параметрів стін, стелі та підлоги вугільної виробки, що дозволяє врахувати три види втрат: втрати на заломлення, втрати через розсіювання і втрати через різні кути нахилу стін. На основі розробленої математичної моделі, було зроблено моделювання поширення радіосигналу. Ключові слова: модель, радіохвиля, втрати, заломлення.
I. Molokovskiy Donetsk National Technical University The propagation of radio waves in the underground part of the mine. This paper presents and analyzes a mathematical model of radio-wave propagation in the conditions of a limited space that is typical of a coal producer substructure. This mathematical model is based on the use of the parameters of side walls, ceiling and floor of coal openings that brings to taking into account three types of losses: refraction losses, losses due to dispersion and losses due to different tilt angle of walls. Refraction losses can be calculated as capacity losses of separate bundles of parallel rays reflecting from all four walls of a tunnel. This requires detection of a grazing angle of a wave which depends upon the array of factors. Though, an upper-range value will be introduced by the effective reflecting surface on side walls and number of rays reverberation at a certain distance. For definition of dispersion losses due to walls unevenness the assumptions that walls are uneven should be made. By dint of Gaussian distribution we describe amplitude of walls unevenness through a mean-square deviation. The losses for greater range of tilt values using Gaussian distribution with a mean-square deviation have been considered instead of calculation of angular losses for a fixed angle. An important criterion is consideration of horizontal and vertical modes as well as consideration of a size effect of horizontal and vertical openings. A mathematical model also enables to calculate overall attenuation. On the grounds of this overall attenuation the calculation of a maximum radio signal propagation depending on wave-length of a radio signals propagated in a free space is made. On the grounds of the developed mathematical model we made modelling of a radio signal propagation. Keywords: model, radio wave, loss, refraction.
Молоковский Игорь Алексеевич, Украина, закончил Донецкий национальный технический университет, канд. тех. наук, доцент кафедры автоматики и телекоммуникаций ГВУЗ «Донецкий национальный технический университет» (ул. Артема, 58, г. Донецк, 83001, Украина). Основное направление научной деятельности – исследование промышленных телекоммуникационных систем, надежность в ТКС, исследование современных технологий беспроводного доступа.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
© Пасічник В.В., Назарук М.В., 2014 160
УДК 004
В.В. Пасічник (д-р техн. наук, проф.), М.В. Назарук (аспірант) Національний університет «Львівська політехніка», м. Львів
кафедра інформаційних систем та мереж e-mail: [email protected], [email protected]
ІНФОРМАЦІЙНО-ТЕХНОЛОГІЧНИЙ СУПРОВІД СИСТЕМНИХ ТРАНСФОРМАЦІЙ ВІТЧИЗНЯНОЇ ОСВІТНЬОЇ ГАЛУЗІ
Проаналізовано базові положення Міжнародної стандартної класифікації освіти (МСКО 2011), описано концепцію та наскрізні класифікаційні змінні МСКО. Подано характеристику освітніх рівнів МСКО. Визначено інформаційно-технологічний супровід системних трансформацій освітньої галузі. Ключові слова: міжнародна стандартна класифікація освіти, рівні МСКО, інформаційно-технологічний супровід.
Постановка проблеми у загальному вигляді Інтеграція освітньої галузі України у світовий освітній простір вимагає суттєвого
вдосконалення національної системи освіти, пошуку ефективних шляхів підвищення якості надання освітніх послуг, модернізації її змісту і організації відповідно до вимог світових тенденцій та ринку праці, розробки механізмів регулювання науково-освітньої галузі, її трансформації відповідно до функціонування в новому інформаційному суспільстві.
Доцільність розробки таких механізмів в Україні зумовлена також необхідністю пошуків, опрацювання та впровадження ефективної системи державного управління, що має забезпечити освітню галузь оптимальними умовами функціонування, налагодити системний механізм її саморегуляції на загальнонаціональному, регіональному та місцевому рівнях у навчальних закладах і наукових установах.
На сьогоднішній день в світі відбуваються глобальні зміни в підходах до отримання знань – трансформуються як освітні системи, так і процеси отримання та обробки інформації школярами, студентами, людьми похилого віку, особами з особливими потребами та ін. Закономірним наслідком, означених вище явищ, є інформатизація освітніх процесів, яка передбачає використання комп’ютерних та телекомунікаційних технологічних розроблень, інфокомунікаційних соціальних сервісів; пришвидшення процесу здобуття нових і закріплення раніше набутих знань, процесів обміну інформацією; просторове наближення та соціопсихологічна адаптація інформативних та пізнавальних освітніх матеріалів до кінцевого споживача, який використовує їх для власного самонавчання та професійного становлення в процесі неперервного навчання впродовж життя.
Запровадження новітніх технологій навчання, основаних насамперед на використанні сучасних інтелектуальних освітніх технологій, забезпечення процесів безперервності освіти вимагає розроблення та запровадження цілого комплексу інтелектуальних інформаційних технологій планування процесів розвитку освітніх об’єктів та їх підрозділів різних рівнів, що уможливить аналітичне опрацювання та супровід траєкторій розвитку освітньої галузі України відповідно до вимог Міжнародної стандартної класифікації освіти.
Метою роботи є аналіз базових положень Міжнародної стандартної класифікації освіти (МСКО) з метою розроблення системних трансформацій вітчизняної освітньої галузі та запровадження комплексу інтелектуальних інформаційних технологій їх підтримки.
Характеристика МСКО-2011

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
161
Міжнародна стандартна класифікація освіти (МСКО), розроблена ЮНЕСКО на початку 70-х років для того, щоб служити "інструментом, який сприятиме збору, компіляції і викладу статистичних даних освітньої галузі як окремих країнах, так і в світі вцілому". МСКО – рамковий документ (ключовий міжнародний освітній стандарт), що дає змогу: узгодити загальні визначення і поняття, а також концепцію організації освіти; систематизувати освітні програми та освітні кваліфікації [1].
МСКО – частина міжнародної системи соціальних і економічних класифікацій ООН і складається з трьох компонентів: 1) узгоджених на міжнародному рівні положень і визначень; 2) системи класифікації; 3) класифікації національних освітніх програм відповідно до МСКО та відповідних кваліфікацій в країнах світу.
МСКО класифікує освітні програми та відповідні кваліфікації за їх змістом з використанням двох основних наскрізних змінних: рівнів освіти (9 рівнів: 0-8); галузей освіти (11 широких, 29 вузьких (напрями) та близько 80 деталізованих (спеціальності) галузей).
Вихідною одиницею класифікації МСКО є освітні програми і відповідні освітні кваліфікації.
Освітня програма – узгоджений комплекс видів освітньої діяльності, що розроблений та організований для досягнення наперед поставлених навчальних цілей упродовж певного тривалого безперервного періоду часу. Загальною характеристикою освітньої програми є те, що після досягнення навчальних цілей видається документ (сертифікат) про успішне її завершення.
За МСКО, кваліфікація – це офіційне підтвердження, як правило, у формі документа, що засвідчує успішне завершення освітньої програми чи її етапу. Кваліфікацію можна отримати за допомогою: успішного завершення освітньої програми повністю; успішного завершення етапу освітньої програми (проміжна кваліфікація освіти); перевірки знань, навичок, компетенції, що не залежать від участі в освітній програмі. Термін «кваліфікація» в МСКО є синонімом терміна «атестат про освіту». Інші терміни, такі як «сертифікат», «ступінь» або «диплом» – це типи кваліфікації, і вони є синонімічні один одному в контексті МСКО.
Типи освіти за МСКО. За МСКО розрізняють такі типи освіти: формальна; неформальна, інформальна (самоосвіта), а також наступні типи навчання: формальне, неформальне, інформальне, випадкове або побічне (несистемне).
Формальна освіта – освіта, що інституціалізована, цілеспрямована, спланована за участю державних і визнаних приватних організацій, і в цілому становить формальну освітню систему країни з надання освітніх програм і відповідних кваліфікацій, які визнані державою.
Неформальна освіта – освіта, що інституціалізована, цілеспрямована та спланована освітнім закладом зазвичай без надання кваліфікацій, визнаних національними органами управління освітою, або без кваліфікацій взагалі, і є додатковою до формальної освіти.
Інформальне навчання визначається як форми навчання, які є цілеспрямованими або ретельно спланованими, але не інституціалізовані. Відповідно, воно може включати навчальну діяльність в сім'ї, на робочому місці, за місцем проживання та в повсякденному житті, і спрямованість його визначається самостійно, сім'єю або соціумом [2].
Характеристика рівнів освіти за МСКО Поняття рівня освіти відображає ступінь складності та спеціалізації змісту освітньої
програми – від базового до складного. Класифікація освітніх програм за рівнями має на меті відобразити повний спектр освітніх траєкторій, які є доступними в системі освіти від рівня 0 до 8.
Рівень освіти 0 – освіта дітей молодшого віку. Програми на рівні освіти МСКО 0, як правило, розробляються на основі комплексного підходу для підтримки пізнавального,

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
162
фізичного, соціального та емоційного розвитку дитини та вводять дитину в середовище організованого навчання поза родиною. Існує дві категорії програм рівня МСКО 0: програми освітнього розвитку для дітей раннього віку та програми допочаткової (дошкільної) освіти. Перша категорія передбачає зміст освіти, розроблений для дітей віком від 0 до 2 років, а друга розрахована на дітей віком від 3 років до вступу в початкову освіту.
Рівень освіти 1 – початкова освіта. Програми на рівні освіти МСКО 1 зазвичай спрямовані на формування в учнів елементарних умінь читання, письма та математики (тобто грамоти та кількісного мислення) і закладання міцного підґрунтя для навчання та розуміння основних галузей знань, особистісного та соціального розвитку, підготовки дітей до навчання на першому етапі середньої освіти. Цей рівень передбачає навчання на елементарному рівні складності з мінімальною спеціалізацією, як що така є. Зазвичай, єдиним критерієм вступу на цьому рівні є вік дитини, що становить не менше 5 (інколи 4) і не більше 7 років. Більшість програм цього рівня тривають 6 років, хоча діапазон тривалості становить від 4 до 7 років. Відтак початкова освіта, як правило, триває до віку 10-12 років. Після завершення початкової освіти можна продовжувати освіту на рівні МСКО 2. В Україні рівню МСКО 1 відповідає початкова загальна освіта (базова школа).
Рівень освіти 2 – перший етап середньої освіти. Програми на рівні освіти МСКО 2 консолідують і розвивають навчальні результати, досягнуті на рівні МСКО 1, організовані за предметно орієнтованими навчальними планами та знайомлять учнів з теоретичними поняттями широкого спектру предметів. Рівень МСКО 2 починається після 4-7 років освіти на рівні МСКО 1. Вступ до рівня МСКО 2, як правило, відбувається у віці від 10 до 13 років. В Україні використовується термін «базова загальна середня освіта» (основна школа).
Рівень освіти 3 – другий етап середньої світи. Програми на рівні освіти МСКО 3 зазвичай завершують середню освіту, достатню для вступу до вищої освіти, або надають компетентності, необхідні для працевлаштування, або поєднують обидві цілі. Рівень 3 починається після 8-11 років освіти, рахуючи від початку рівня 1. Учні, як правило, переходять на цей рівень у віці від 14 до 16 років. Програми рівня 3 закінчуються через 11-13 років після початку рівня 1 (або приблизно у віці 17-18 років), за найбільш поширеною у світі сукупною тривалістю такого навчання 12 років. Програми, що класифікуються як рівень МСКО 3, у різних країнах називаються по-різному, в Україні для найменування рівня 3 використовується термін «повна загальна середня освіта» (старша школа).
Рівень освіти 4 – остання нетретинна освіта. Післясередня нетретинна освіта передбачає навчання на базі середньої освіти та готує як до виходу на ринок праці, так і до вступу до третинної освіти. Така освіта спрямована на індивідуальне здобуття знань, умінь, інших компетентностей нижчого ступеня складності, ніж для третинної освіти. В Україні для найменування рівня МСКО 4 використовується термін «професійно-технічна освіта».
Рівень освіти 5 – короткий цикл третинної освіти. Програми на рівні освіти МСКО 5 в основному призначені для надання учасникам професійних знань, умінь, інших компетентностей. Академічні програми третинної освіти нижчого за бакалаврський або еквівалентний рівень також відносять до рівня МСКО 5. Вступ до програм рівня 5 вимагає успішного завершення рівня МСКО 3 або МСКО 4 з доступом до третинної освіти. Програми, які класифікують за рівнем МСКО 5, можуть називатися по-різному. В Україні для найменування рівня МСКО 5 використовується термін «вища освіта короткого циклу».
Рівень освіти 6 – бакалаврат або його еквівалент. Програми на рівні освіти МСКО 6 головним чином призначені для надання учасникам проміжних за складністю академічних та/або професійних знань, умінь, інших компетентностей, що ведуть до здобуття першого ступеня чи еквівалентної кваліфікації. На цьому рівні програми зазвичай ґрунтуються на теоретичній підготовці, можуть включати практичний компонент і спираються на новітні дослідження та / або провідний професійний досвід. Ці програми традиційно впроваджуються університетами або рівнозначними закладами вищої освіти. Вступ до таких

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
163
програм зазвичай вимагає успішного завершення програми рівнів МСКО 3, МСКО 4 або МСКО 5 з доступом до третинної освіти. В Україні для найменування рівня МСКО 6 використовується термін «бакалаврський або еквівалентний рівень».
Рівень освіти 7 – магістратура або її еквівалент. Програми рівня МСКО 7 як правило, призначені для надання учасникам поглиблених академічних та / або професійних знань, умінь, інших компетентностей, що ведуть до здобуття другого ступеня або еквівалентної кваліфікації. Програми цього рівня можуть мати істотний науково-дослідницький компонент, але ще не надають докторську кваліфікацію. Вступ до програм рівня МСКО 7, які готують до здобуття другого чи подальшого ступеня, зазвичай вимагає успішного завершення програми рівнів МСКО 6. В Україні використовується термін «магістерський або еквівалентний рівень».
Рівень освіти 8 – докторантура і її еквівалент. Програми на рівні освіти МСКО 8 головним чином призначені для підготовки до здобуття вищих дослідницьких кваліфікацій. Рівень МСКО 8 зазвичай завершується представленням і захистом кваліфікаційної роботи, дисертації або еквівалентної письмової роботи, що є результатом оригінального дослідження, представляють істотний внесок у відповідну галузь знань та за якістю заслуговують на опублікування. Вступ до рівня МСКО 8 зазвичай передбачає успішне завершення програми рівня МСКО 7. В Україні використовується термін «докторський або еквівалентний рівень».
Траєкторії переходу між рівнями освіти в рамках МСКО зображені на рисунку 1.
Рисунок 1 – Траєкторії переходів між рівнями освіти в рамках МСКО
Інформаційно-технологічний супровід системних трансформацій освітньої галузі.
Основні поняття та означення Розроблення комплексу інтелектуальних інформаційних технологій планування
процесів розвитку освітніх об’єктів та їх підрозділів різних рівнів, відповідно до вимог МСКО, передбачає проведення науково-методичних досліджень та розробок у напрямах:

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
164
змісту всіх рівнів освіти і виховання, технічних і навчально-методичних засобів освіти, проблем ресурсного (кадрового, організаційного, фінансового й матеріально-технічного) забезпечення освіти; впровадження інноваційних технологій, забезпечення закладів освіти новими технічними засобами навчання, створення єдиного порталу освіти та телекомунікаційної мережі, електронних бібліотек, баз даних, систем тестування та дистанційного навчання. Тому цілком закономірно постає потреба в інформаційно-технологічному супроводі трансформації освітньої галузі.
Для визначення змісту та сутнісної структури інформаційно-технологічного супроводу системних трансформацій освітньої галузі коротко подамо означення наступних термінів:
Технологія (від грецького techno – мистецтво, майстерність, вміння та грецького logos – знання) – сукупність знань і умінь, методів та інструментів, за допомогою яких можна створювати будь-які матеріальні та нематеріальні об'єкти з наявних ресурсів. В іншому розумінні технологія – спосіб переробки енергії, інформації або речовин заради досягнення певної мети. Технологія поєднує в собі методи, процедури, прийоми, різні операції і т. ін., вона тісно взаємопов’язана із засобами, що застосовуються, обладнанням, інструментами, використовуваними матеріалами [3].
Інформаційні технології (ІТ) використовують комп’ютерні, комунікаційні та програмні засоби для реалізації процесів відбору, реєстрації, подання, збереження, опрацювання, захисту та передавання інформації – інформаційного ресурсу у формі даних та знань – з метою створення відповідних інформаційних продуктів[4].
Попри те, що термін "супровід" усталений і вже набув значного поширення у різних сферах людської діяльності, його зміст досі не є загальновизнаним і часто трактується фахівцями по-різному. Так, супровід у педагогіці розуміють як діяльність, що забезпечує створення умов для прийняття особистістю оптимального рішення в різних ситуаціях життєвого вибору. У психології супровід розглядається як система професійної діяльності, що забезпечує створення умов для успішної адаптації людини до обставин її життєдіяльності [5].
У нашому розумінні інформаційно-технологічний супровід (ІТС) системних трансформацій освітньої галузі – це сукупність методів, інформаційних процесів, технічних, мережевих, програмних та інформаційно-лінгвістичних засобів необхідних для успішної реорганізації сфери освіти з метою підвищення її якості та конкурентоспроможності, надання освітніх послуг відповідно до суспільних потреб, забезпечення доступності та неперервності освіти впродовж життя, модернізації її структури, змісту і організації відповідно до вимог міжнародних освітніх стандартів.
Таким чином, інноваційні трансформації освітньої галузі неможливі без активного використання: методів системного аналізу – для формування концептуальної моделі комплексу інтелектуальних освітніх інформаційних технологій; методів побудови сховищ даних – для дослідження семантичних зв’язків між джерелами даних; методів консолідації та інтегрування даних – для формування депозитарію навчальних та навчально-методичних матеріалів; методів хмарних обчислень та методів проектування високонавантажених серверів – для організації доступу до сховища навчальних та навчально-методичних матеріалів; методів штучного інтелекту – для проектування інтелектуальної системи формування освітнього контенту та ін.
Деякі з компонент ІТС системних трансформацій освітньої галузі подано на рис. 2. Подамо означення та сутнісну структуру окремих компонент ІТС системних
трансформацій освітньої галузі. Використання концептів технологій сховищ та просторів даних в контексті трансформації освітньої галузі дозволяє проводити детальний аналіз поточного стану освітніх ресурсів та виявляти тенденцій їх вдосконалення, шляхом зіставлення даних (параметрів), що характеризують діяльність структурних освітянських підрозділів різних рівнів. Зокрема у [6,7] авторами були проаналізовані комплекси

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
165
параметрів оцінювання діяльності навчальних закладів відповідно до нормативних документів Міністерства освіти і науки України та регіональних (місцевих) органів виконавчої влади. Запропоновано розроблення інформаційних технологій на основі побудови та опрацювання гіперкубів даних, що дозволить здійснювати детальний аналіз діяльності навчальних закладів, поточного стану освітніх ресурсів, якості надання освітніх послуг і т.д.
Рисунок 2 – Компоненти інформаційно-технологічного супроводу системних
трансформацій освітньої галузі
Інноваційні трансформації освітньої галузі неможливі без активного використання високотехнологічних систем підтримки прийняття рішень, якими є інтелектуальні системи підтримки прийняття рішень. Як відомо, ІСППР – це програмно-алгоритмічний комплекс, який оперує знаннями у певній предметній області з метою вироблення рекомендацій або розв’язання задачі, щоб допомогти користувачам, які приймають рішення в складних умовах для повного і об’єктивного аналізу предмету діяльності.
Онтологія – це комплекс понять від самих загальних до конкретних, які включають повний спектр об’єктів та відношень, подій та процесів, а також значень (атрибутів та відношень) деякої предметної області, які визначаються, якщо це потрібно, в часі та просторі. Наприклад, у вигляді онтології представлена структура освітніх стандартів [8].
Інформаційно-комунікаційні мережі – мережі для обробки, зберігання і передавання даних, сукупність джерела та користувача інформації, поєднаних в єдину мережу за допомогою засобів передачі даних (фізичних каналів зв’язку і комутаційного устаткування). Зокрема, соціальні комп’ютерні мережі є одним з найбільш універсальних інструментів комунікування і популярним інформаційно-технологічним сервісом, який сьогодні утримує активну увагу значної частини масової Інтернет-аудиторії. В сфері освіти цей інформаційний феномен сприяє формуванню та розвитку технологій електронного навчання, пропонуючи нові інноваційні, організаційні та методичні рішення [9].
Хмарні обчислення (англ. Cloud Computing) – це модель забезпечення повсюдного та зручного доступу на вимогу через мережу до спільного пулу обчислювальних ресурсів, що підлягають налаштуванню (наприклад, до комунікаційних мереж, серверів, засобів збереження даних, прикладних програм та сервісів), і які можуть бути оперативно надані та звільнені з мінімальними управлінськими затратами та зверненнями до провайдера [10].

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
166
Тому їх застосування може сприяти поширенню інформаційних технологій в навчальних закладах України з урахуванням особливостей їх технічного та матеріального стану.
Організація навчального процесу з використанням мультимедійних засобів, таких як, електронні лектори, тренажери, підручники, енциклопедії; розробка ситуаційно-рольових та інтелектуальних ігор з використанням штучного інтелекту; моделювання процесів і явищ; забезпечення дистанційної форми навчання та ін. сприятиме трансформації процесу отримання та обробки інформації школярами, студентами, людьми похилого віку, особами з особливими потребами та ін.
Таким чином, використання інформаційних і комунікаційних мереж, технологій багатовимірного аналізу даних та побудови гіперкубів даних, інтелектуальних систем підтримки прийняття рішень на основі онтологій, хмарних технологій, мультимедійних систем та ін. сприятиме вдосконаленню системи освіти, модернізація її змісту та організації відповідно до вимог ринку праці та світових освітніх стандартів.
Висновки Стрімкий розвиток інформаційних технологій стимулює застосування інноваційних
підходів в широкому спектрі галузей людської діяльності, в тому числі і в освіті. Це стосується створення: освітніх інформаційних систем; експертних систем та баз даних; стандартизації освітніх інформаційних ресурсів; ведення електронного документообігу; формування дистанційного навчання, освітніх інформаційних мереж і т. ін.
Міжнародна стандартна класифікація освіти (МСКО), як частина системи економічної і соціальної класифікації ООН, є еталонною класифікацією, що слугує організації та упорядкуванню освітніх програм і відповідних кваліфікацій за рівнями та галузями і є результатом погодження та затвердженим від імені 195 країн-членів ЮНЕСКО.
Ключові поняття та визначення МСКО розроблені таким чином, щоб бути застосовними та дієвими на міжнародному рівні, а також поширеними на спектр освітніх систем, незалежно від їх особливостей. Вона включає три паралельні класифікації: МСКО – П для освітнього рівня програм, МСКО – А для рівня освітньої кваліфікації, і третій наскрізний рівень МСКО – Ф для галузей освіти та підготовки за освітніми програмами та кваліфікаційними вимогами.
МСКО надає можливість уніфікувати галузі знань і напрями освітньої діяльності на міжнародному рівні, що, в свою чергу, дозволяє забезпечити співставлення національних показників. Водночас МСКО не має на меті внесення змін до національних систем освіти, а лише слугує інструментом опису національних освітніх систем в єдиних термінах та категоріях.
Авторами було проаналізовано базові положення Міжнародної стандартної класифікації освіти (МСКО 2011), описано концепцію та наскрізні класифікаційні змінні МСКО, подано характеристику освітніх рівнів та досліджено траєкторії переходів між рівнями освіти. Інформаційно-технологічний супровід (ІТС) системних трансформацій освітньої галузі, в роботі, визначено як сукупність методів, виробничих процесів, технічних, мережевих, програмних та інформаційно-комунікаційних засобів необхідних для успішної реорганізації сфери освіти.
Подальші дослідження будуть спрямовані на розроблення комплексу інтелектуальних інформаційних технологій з використанням технологій побудови та опрацювання гіперкубів даних освітянських об’єктів різних рівнів, що уможливить інформаційно-аналітичне опрацювання та технологічний супровід траєкторій розвитку вітчизняної освітньої галузі відповідно до вимог Міжнародної стандартної класифікації освіти.
Список використаної літератури 1. Международная стандартная классификация образования: Генеральная конференция 36
сессия, 2011 г. Париж. – Париж, 2011. – 92 с. – ISBN 978-92-9189-132-0.
ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
167
2. Красняков Євген. Міжнародні нормативно-правові акти про освіту та їхній вплив на формування державної політики в галузі освіти України / Євген Красняков // Журнал Верховної Ради України. – 2012. – № 14 (323): Віче. – С. 22-26.
3. Пасічник В.В. Інформаційні компоненти інтелектуальних систем / В.В. Пасічник, Н.Б. Шаховська // Вісник Національного університету "Львівська політехніка". – 2008. – № 621: Інформаційні системи та мережі. – С. 191-203.
4. Шаховська Н.Б. Сховища та простори даних: монографія / Н.Б. Шаховська, В.В. Пасічник. – Львів: Видавництво Львівської політехніки, 2009. – 244 с.
5. Модернізаційні процеси в освіті та суспільстві: психотехнології супроводу: монографія / за ред. П.Д. Фролова; Національна академія педагогічних наук України, Інститут соціальної та політичної психології. – Кіровоград: Імекс-ЛТД, 2013. – 312 с.
6. Григорович В.Г. Інформаційні параметри загальноосвітнього навчального закладу / В.Г. Григорович, М.В. Назарук, В.В. Пасічник // Вісник Національного університету "Львівська політехніка". – 2012. – № 743: Інформаційні системи та мережі. – С. 74-86.
7. Назарук М.В. Інформаційна модель навчального закладу / М.В. Назарук, В.Г. Григорович // Сучасні проблеми математичного моделювання та обчислювальних методів: матеріали Всеукраїнської наукової конференції, (22-23 лютого 2013 р., м. Рівне). – Рівне, 2013. – С. 112.
8. Литвин В.В. Бази знань інтелектуальних систем підтримки прийняття рішень: монографія / В.В. Литвин. – Львів: Видавництво Львівської політехніки, 2011. – 240 с.
9. Назарук М.В. Моделювання міського освітнього середовища як профільної соціальної мережі / М.В. Назарук, В.В. Пасічник // Міжнародний науково-технічний журнал «Інформаційні технології та комп’ютерна інженерія». – 2013. – № 3 (28). – С. 42-47.
10. Хмарні технології в освіті: матеріали Всеукраїнського науково-методичного Інтернет-семінару (Кривий Ріг – Київ – Черкаси – Харків, 21 грудня 2012 р.). – Кривий Ріг: Видавничий відділ КМІ, 2012. – 173 с.
References 1. International Standard Classification of Education: The General Conference: Session 36 (2011),
36C/19, UNESCO, Paris. 2. Krasnyakov, E. (2012), “Mizhnarodni normatyvno-pravovi akty pro osvitu ta yikhniy vplyv na
formuvannya derzhavnoyi polityky v haluzi osvity Ukrayiny”, Zhurnal Verkhovnoyi Rady Ukrayiny “Viche”, no. 14(323), pp. 22-26.
3. Pasichnyk, V.V. and Shakhovs'ka, N.B. (2008), “Informatsiyni komponenty intelektual'nykh system”, Visnyk Natsional'noho universytetu "L'vivs'ka politekhnika", no. 621. pp. 191-203.
4. Shakhovs'ka, N.B. and Pasichnyk, V.V. (2009), Skhovyshcha ta prostory danykh, Vydavnytstvo L'vivs'koyi politekhniky, L'viv, Ukraine.
5. Frolov, P.D. (ed.) (2013), Modernizatsiyni protsesy v osviti ta suspil'stvi: psykhotekhnolohiyi suprovodu, Imeks-LTD, Kirovohrad, Ukraine.
6. Hryhorovych, V.H., Nazaruk, M.V. and Pasichnyk, V.V. (2012), “Informatsiyni parametry zahal'noosvitn'oho navchal'noho zakladu”, Visnyk Natsional'noho universytetu "L'vivs'ka politekhnika". no. 743, pp. 74-86.
7. Nazaruk, M.V. and Hryhorovych, V.H. (2013), “Informatsiyna model' navchal'noho zakladu”, Suchasni problemy matematychnoho modelyuvannya ta obchyslyuval'nykh metodiv, Materialy Vseukrayins'koyi naukovoyi konferentsiyi, Rivne, Ukraine, 22-23 February 2013, pp. 112.
8. Lytvyn, V.V. (2011), Bazy znan' intelektual'nykh system pidtrymky pryynyattya rishen', Vydavnytstvo L'vivs'koyi politekhniky, L'viv, Ukraine.
9. Nazaruk, M.V. and Pasichnyk, V.V. (2013), “Modelyuvannya mis'koho osvitn'oho seredovyshcha yak profil'noyi sotsial'noyi merezhi”, Mizhnarodnyy naukovo-tekhnichnyy

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
168
zhurnal «Informatsiyni tekhnolohiyi ta komp"yuterna inzheneriya”, VNTU, Vinnytsya, no. 3(28), pp. 42-47.
10. “Khmarni tekhnolohiyi v osviti”, Materialy Vseukrayins'koho naukovo-metodychnoho Internet-seminaru (Kryvyy Rih – Kyyiv – Cherkasy – Kharkiv), Kryvyy Rih, Ukraine, 21 December 2012, pp. 173.
Надійшла до редакції: Рецензент: 31.03.2014 д-р техн. наук, проф. Литвин В.В.
В.В. Пасичник, М.В. Назарук Национальный университет «Львовская политехника» Информационно-технологическое сопровождение системных трансформаций отечественного образования. Проанализированы основные характеристики Международной стандартной классификации образования (МСКО 2011). Дана характеристика образовательных уровней и исследованы траектории переходов между уровнями образования. Описано информационно-технологическое сопровождение системных трансформаций сферы образования. Ключевые слова: международная стандартная классификация образования, классификационные переменные МСКО, уровни МСКО.
V.V. Pasichnik, M.V. Nazaruk National University “Lviv politechnic” Information technology maintenance of system transformations of the national education. The provisions of the International Standard Classification of Education were analyzed (ISCED 2011). Description of educational levels is provided and trajectories of transitions between education levels are investigated. Informational and technological support of the transformation of education is described. Key words: International Standard Classification of Education, ISCED classification variables, ISCED levels.
Пасічник Володимир Володимирович, Україна, закінчив Львівський політехнічний інститут, доктор технічних наук, професор, професор кафедри інформаційних систем та мереж Національного університету «Львівська політехніка» (вул. С. Бандери, 12, м. Львів, 79013, Україна). Напрямки наукової діяльності – інформаційне моделювання, системи баз даних та знань, інтелектуальні системи прийняття рішень.
Назарук Марія Володимирівна, Україна, закінчила Рівненський державний гуманітарний університет, аспірант кафедри інформаційних систем та мереж Національного університету «Львівська політехніка» (вул. С. Бандери, 12, м. Львів, 79013, Україна). Напрямки наукової діяльності – системи баз даних та знань, розподілені інформаційно-аналітичні системи, інтелектуальні системи прийняття рішень.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
© Батыр С.С., Хорхордин А.В., 2014 169
УДК 681.518.5
С.С. Батыр, А.В. Хорхордин (канд. техн. наук, доц.)
ГВУЗ Донецкий национальный технический университет, г. Донецк
кафедра автоматики и телекоммуникаций
e-mail: [email protected], [email protected]
ОСОБЕННОСТИ ОЦЕНКИ ЭФФЕКТИВНОСТИ
МЕТОДОВ УПРАВЛЕНИЯ ОЧЕРЕДЬЮ МАРШРУТИЗАТОРА
Предложена методика оценки и сравнения эффективности работы методов управления
очередями маршрутизатора, как средства управления трафиком в сетевом узле.
Представленные результаты позволяют наглядно оценить эффективность использования
различных методов в изменяющихся условиях. Исследование проводилось на базе ранее
разработанной модели сегмента сети в пространстве состояний. Проведенное сравнение
подтвердило эффективность разработанного метода управления с адаптацией к текущей
нагрузке.
Ключевые слова: параметры качества обслуживания, маршрутизатор, очередь, управление
очередью, пространство состояний, метод управления, адаптация.
Общая постановка проблемы
Сети с пакетной коммутацией данных прочно заняли свое место, доказав свою
эффективность при передаче данных. Они используются в самых разных областях. Это сети
общего пользования (Интернет, метронеты), корпоративные(офисные, кампусные),
промышленные (верхние уровни системы АСУ ТП) и др.
Наиболее популярны в мире сети пакетной коммутации на базе стека протоколов
TCP/IP. Протоколы данного стека поддерживаются практически любыми устройствами: от
интеллектуальных датчиков до систем управления промышленными установками, от
мобильных телефонов до спутников связи. Сейчас происходит формирование так
называемого «Интернета вещей», когда все устройства и предметы вокруг человека будут
подключены к единой глобальной сети.
Вне зависимости от оконечных устройств, процесс передачи данных происходит
примерно одинаково. Данные, подлежащие передаче, разделяются на сегменты, сегменты
упаковываются в пакеты и дальше передаются на канальный уровень, который отвечает за
организацию канала связи. Для стека протоколов TCP/IP требуется, чтобы источники и
приемник поддерживали прямую и обратную передачу данных. При этом один и тот же
канал связи могут использовать сразу несколько источников, разделяя между собой его
сетевые ресурсы. Естественно, при этом возникнет ситуация взаимного влияния источников
друг на друга.
Дополнительным преимуществом протоколов IP считается независимость путей
доставки – пакеты данных для одной и той же пары «источник-приемник» могут
доставляться различными путями. С одной стороны, это позволяет распределять нагрузку
между каналами связи, но с другой – усложняет оценку взаимного перекрестного влияния
между источниками.
Таким образом можно подытожить, что передача данных по сети с пакетной
коммутацией данных представляет собой сложный процесс, который существенно зависит от
структуры сети, ее размерности, потоков данных, создаваемых источниками и др. Его
результативность зависит от распределения ресурсов сети между источниками передачи

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
170
данных. Для улучшения работы сети необходимо управлять распределением ее ресурсов
между источниками.
Для определения уровня эффективности управления необходимо установить критерий
эффективности, который должен учитывать показатели, относящиеся как к сети в целом, так
и показатели, учитывающие на сколько эффективна сеть относительно конечных абонентов.
Основные показатели эффективности работы сегмента сети.
К основным показателям эффективности работы сегмента сети относят[1]:
- среднюю загрузку канала за интервал времени ;
- среднюю задержку доставки данных за интервал времени ;
- вариацию средней задержки данных за интервал времени ;
- вероятность потери пакета данных ;
Дополнительные показатели, которые играют роль при распределении/разделении
ресурсов сети между источниками данных:
- справедливость разделения пропускной полосы канала связи между источниками
;
- справедливость разделения потерь пакетов данных между источниками .
Для эффективной работы сети необходимо, чтобы все показатели находились в
определенных диапазонах. Причем выход любого из показателей за допустимый диапазон
ухудшает качество работы сети с точки зрения конечных абонентов. Колебания показателей
внутри заданного диапазона для конечного абонента незаметны.
Выбор критерия оценки эффективности управления
Выбор наиболее эффективного метода управления системой в общем виде можно
разделить на несколько этапов: сначала решается задача структурного синтеза –
производится выбор метода регулирования в зависимости от структуры объекта, если объект
позволяет сделать это однозначно, либо определяются несколько возможных методов. При
этом определяется лишь структура регулятора без указания числовых значений параметров
элементов. После этого нужно задать или рассчитать значения этих параметров, т.е.
выполнить параметрический синтез.
Задача параметрического синтеза в общем виде может быть представлена так: заданы
условия работоспособности на выходные параметры и нужно найти номинальные значения
проектных параметров , к которым относятся параметры проектируемой СУ.
Базовая задача оптимизации ставится как задача математического программирования
(1)
Разработано несколько методик решения даной задачи как задачи оптимизации:
- частный критерий (область Парето);
- аддитивный и мультипликативный;
- максиминный.
Парето применяют когда можно выделить область желаемых значений, аддитивный и
мультипликативный предполагают взвешенную сумму/произведение показателей, но при
этом возникает сложный вопрос обоснования значений взвешивающих коэффициентов.
Поэтому остановимся детальнее на максиминном критерии оценки эфективности.
Минимаксный (максиминный) критерий предназначен для случаев, когда невозможно
установить аналитическую взаимосвязь между переменными управления. Для определения
минимума переменные нормируются и в качестве критерия выбирается максимум из
минимальных значений переменных. В качестве переменных управления следует взять: ,
, , и . Таким образом, для оценки эффективности управления по
максиминному критерию набор переменных будет иметь вид:

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
171
(2)
Для их нормализации определяется их допустимый диапазон следующим образом:
- средняя загрузка канала за интервал времени - ограничена сверху максимальной
пропускной способностью канала связи и должна стремиться к ней: . В
нормированной форме переменная примет вид:
(3)
Для достижения максимума введенное выражение (3) должно минимизироваться:
;
- средняя задержка доставки данных за интервал времени – значение ограничено
сверху максимальным временем ожидания подтверждения доставки . Если это время
превышено, то это означает разрыв связи. Эта величина ограничена снизу минимальным
временем доставки . Параметр должен быть минимизирован ко времени доставки,
для нормализации и минимизации вводится переменная:
(4)
- вероятность потери пакета данных – для нормальной работы сетей пакетной
коммутации значение не должно превышать , нормализация не нужна,
переменная физически ограничена диапазоном :
(5)
- справедливость разделения пропускной полосы канала связи между источниками
– функция справедливости разделения ресурса физически ограничена диапазоном
. Максимальная справедливость достигается при , поэтому вводится
эквивалентное выражение:
, (6)
- справедливость разделения потерь пакетов данных между источниками -
аналогично , вводится выражением:
, (7)
Тогда значение критерия эффективности будет определяться выражением:
. (8)
Таким образом, с помощью выражения (8) можно провести оценку эффективности и
взаимное сравнение методов управления работой сегмента сети с пакетной коммутацией.
Рассмотрим структуру сегмента сети детальнее и определим эффективность каких методов
необходимо определить.
Структура сегмента сети
На сетевом уровне сеть состоит из хостов, каналов связи и маршрутизаторов[3].
Произведем их анализ как элементов системы управления.
Как правило, двухпортовый маршрутизатор представляет собой аппаратное устройство
с двумя сетевыми интерфейсами. Один интерфейс предназначен для подключения локальной
сети (LAN), а второй – для подключения к внешней сети (WAN). Интерфейсы
двунаправленные, интерфейс LAN высокоскоростной, совместимый с используемой в
локальной сети технологией. Интерфейс WAN зависит от используемой технологии канала
связи. Современное оборудование использует технологию WAN-интерфейса, аналогичную
LAN для унификации и снижения общей стоимости оборудования.
Выходами маршрутизатора будут:
- текущая длина очереди пакетов в выходном буфере [в дискретной форме ];
- вектор сигналов об отбрасывании пакета .
Возмущающим воздействием на маршрутизатор является интенсивность поступающего
на вход маршрутизатора потока трафика от каждого источника .

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
172
При переполнении очереди и при работе некоторых методов управления очередью
необходимо выбирать случайным образом, какие из пакетов будут отброшены. Для этого
введем как возмущающее воздействие вектор случайных равномерно распределенных чисел
, которые будут определять вероятность отбрасывания пакета для каждого из источников.
Таким образом, внутри маршрутизатора можно выделить три блока. Первый
производит пакетирование входящей нагрузки, превращая загрузку канала связи в набор
пакетов, второй отвечает за моделирование работы очереди маршрутизатора, третий – за
генерацию сигналов об отбрасывании пакета при переполнении очереди с выдачей сигнала
об этом на соответствующий источник.
Методы управления очередью маршрутизатора. На сегодняшний день разработано
порядка десятка различных методов управления очередью. Однако большая часть из них
требуют настройки под параметры поступающего в очередь потока данных. Неправильная
настройка ведет к избыточным потерям и уменьшению реальной пропускной способности
маршрутизатора. Поэтому системные администраторы зачастую отключают управление
очередью, оставляя борьбу с перегрузкой противоперегрузочным алгоритмам источников.
Эта мера снижает нагрузку на процессор машрутизатора и уменьшает время, затрачиваемое
на обработку пакета. При этом остается лишь базовое управление очередью: пакеты
помещаются в неё, пока есть свободное место, очередь переполнилась – пакеты
отбрасываются.
Метод Drop-Tail (DT) или метод “отсечения хвоста” крайне прост и работает
следующим образом: если пакет в буфер можно поместить – он добавляется, нет –
отбрасывается. Drop-Tail представляет собой простейший релейный регулятор. Применение
релейного регулятора может вызывать колебательные процессы в системе, что и
наблюдается на практике.
Неэффективность метода DT стала существенной проблемой уже к началу 90-ых
годов XX в. Существенная разгрузка очереди следом за перегрузкой вела к синхронизации
источников и дополнительно ухудшала ситуацию. Для борьбы с синхронизацией и
наступлением состояния перегрузки очереди был предложен метод случайного раннего
обнаружения(с англ. Random Early Detection – RED).
Идея метода заключалась в том, чтобы по средней длине очереди определять уровень
вероятности наступления состояния перегрузки и принимать меры по её предотвращению.
Фильтрация коротких импульсов нагрузки позволила бы отсечь ложные срабатывания, а
схема случайного выбора источников, пакеты от которых будут сброшены, ведет к
дополнительной рассинхронизации источников и повышению равномерности нагрузки на
сеть.
Метод BLUE был разработан как альтернатива метода RED. Метод использует в
качестве входной информации не текущую занятость очереди, а интенсивность потерь
пакетов и утилизацию выходного канала. Если из-за переполнения очереди пакеты
продолжительное время отбрасываются, то метод увеличивает вероятность
сброса/маркирования пакета , что ведет к увеличению интенсивности сброса пакетов при
постановке и уменьшению загрузки очереди. И наоборот, если очередь опустошается или
канал связи простаивает, метод BLUE уменьшает вероятность сброса/маркирования. Это
позволяет найти наиболее эффективное значение при стабильном потоке данных.
Для решения проблемы долгой реакции метода RED в работе
Error! Reference source not found. было предложено использовать пропорционально-
интегральный регулятор. Метод назвали “PI controller” Синтез ПИ-регулятора производится
на базе нелинейной гидродинамической модели потоков данных на участке сети. Регулятор
должен стабилизировать длину очереди маршрутизатора на заданной величине . Однако
метод популярности не получил, так как для хороших результатов требуется подстройка
параметров подл уровень нагрузки на сеть.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
173
В работах [5] и [6] предложена усовершенствованный регулятор с переменной
структурой коорый базируется на пропорционально-интегральном регуляторе. При малой и
большой нагрузке включается релейный регулятор, при средней – ПИ-регулятор. Уровень
нагрузки, а точнее состояние сегмента сети, определяется при помощи нечеткой логики.
Влияние маршрутизатора на качество обслуживания
Маршрутизатор является технологическим узлом, который пропускает через себя весь
поток трафика. С учетом принятых допущений для источников данных значительную роль в
обеспечении эффективности работы сегмента сети играет именно он. Допущения для
маршрутизатора свели его до очереди на выходном интерфейсе, то можно сделать вывод о
том, что определять эффективность работы сегмента сети будет именно очередь
маршрутизатора. Рассмотрим детальнее её влияние на каждую из переменных.
В выбранной для исследования топологии (“бутылочное горлышко”) загрузка канала
зависит от наличия пакетов данных в очереди, если очередь пуста, то и данных к передаче
нет, канал связи простаивает, что и ведет к уменьшению . Так что можно заявить, что:
.
Задержка доставки для выбранной топологии определяется технологической
минимальной задержкой доставки и временем стояния пакета в очереди:
. Тогда .
Переполнение очереди приводит к отбрасыванию пакетов, что ведет к увеличению
. Тогда можно сделать вывод, что: .
Переменные управления и связаны с переменными источников и
. Переменная потерь пакетов непосредственно зависит от очереди, так как потери
происходят именно там, а, следовательно, и от длины очереди и тогда можно сделать вывод,
что имеет место функциональная зависимость вида . Представить её в
аналитическом виде, скорее всего, крайне затруднительно, но произвести вычисление по
результатам моделирования вполне возможно. Аналогично и для – переменная
состояния источника определяется поступившими сигналами и . В свою
очередь интервалы времени между поступлениями зависят от задержки доставки
пакетов, а, следовательно, и от времени стояния в очереди. В таком случае можно сделать
вывод, что .
Приняв во внимание все вышесказанное, набор переменных для критерия
эффективности (8) примет вид:
(9)
Выражение (9) позволяет сделать вывод, что эффективность работы участка сети
зависит от длины очереди маршрутизатора. В этом случае за счет совершенствования
системы управления очередью можно повысить эффективность работы сети в целом.
Для проведения оценки эффективности произведем моделирование работы
регуляторов на сегменте сети при различных уровнях нагрузки. Моделирование
производилось при помощи математической модели, приведеннйо в [5] и [6].
В таблице 1 толстыми линиями объединены в блок результаты моделирования с
одинаковыми входными параметрами и разным регуляторами, лучший результат в блоке
выделен жирным шрифтом, худший – курсивом.
Проведенный расчет значений максиминного критерия показал, что по данному
критерию худшим регулятором будет DropTail, лучшими – RED и PI. Оценки, данные для
этих регуляторов, в других источниках совпадают с полученными результатами.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
174
Таблица 1
Результаты расчета максиминного критерия
№ Ntcp C Trtt Reg F(X)
1 10 10Mb 35ms DT 0.018250
2 10 10Mb 35ms RED 0.018167
3 10 10Mb 35ms BLUE 0.015168
4 10 10Mb 35ms PI 0.017518
5 10 10Mb 50ms DT 0.021028
6 10 10Mb 50ms RED 0.020782
7 10 10Mb 50ms BLUE 0.021028
9 10 10Mb 50ms PI 0.014299
10 100 10Mb 35ms DT 0.040494
11 100 10Mb 35ms RED 0.021410
12 100 10Mb 35ms BLUE 0.042091
13 100 10Mb 35ms PI 0.021010
14 100 10Mb 100ms DT 0.021099
15 100 10Mb 100ms RED 0.021012
16 100 10Mb 100ms BLUE 0.021112
17 100 10Mb 100ms PI 0.021011
18 200 10Mb 50ms DT 0.042999
19 200 10Mb 50ms RED 0.042789
20 200 10Mb 50ms BLUE 0.042987
21 200 10Mb 50ms PI 0.042699
22 200 10Mb 100ms DT 0.042303
23 200 10Mb 100ms RED 0.042104
24 200 10Mb 100ms BLUE 0.042273
25 200 10Mb 100ms PI 0.042107
Выводы
В представленной статье рассмотрена методика оценки эффективности работы
методов управления очередями маршрутизатора. Данная методика позволяет учесть целый
комплекс параметров отвечающих за качество обслуживания в сетях с пакетной
коммутацией. Полученные для различных методов управления оценки позволят произвести
сравнение методов по уровню их эффективности.
Для примера рассмотрены наиболее популярные методы управления: DropTail; RED и
BLUE и предложенный автором PI. Проведены исследования на основе ранее разработанной
математической модели, по результатам которых произведена оценка эффективности.
Исследования производились при различных уровнях нагрузки на сегмент сети. Анализ
показал, что существующие методы менее эффективны чем предложенный регулятор с
переменной структурой и адаптацией к уровню нагрузки на сеть.
В статье впервые предложена методика оценки эффективности работы метода
управления очередью маршрутизатора, которая базируется на максиминном критерии.
Данная методика позволяет наглядно в численной форме производить оценку
эффективности, при этом учитывая целый набор рекомендованных параметров.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
175
Список использованной литературы
1. Определение терминов, относящихся к качеству обслуживания: ITU-T E.800 (09/2008)
[Электронный ресурс] / ITU-T. – Режим доступа: http://handle.itu.int/11.1002/1000/9524.
2. Кучерявый Е.А. Управление трафиком и качество обслуживания в сети Интернет / Е.А.
Кучерявый. – СПб.: Наука и Техника, 2004. – 336 с.: ил.
3. Hollot C.V. On Designing Improved Controllers for AQM Routers Supporting TCP Flows
[Электронный ресурс] / C.V. Hollot, Vishal Misra, Don Towsley and Wei-Bo Gong TO
APPEARIN IEEE INFOCOM 2001, 1. - Режим доступа:
ftp://ftp.cs.umass.edu/pub/net/pub/MisraInfocom01-AQM-Controller.pdf.
4. Adan Ivo, Queueing Theory [Электронный ресурс] / Ivo Adan, Jacques Resing. - Режим
доступа: http://www.win.tue.nl/~iadan/queueing.pdf.
5. Батыр С.С. Эмпирическая математическая модель участка сети Интернет / С.С. Батыр,
А.В, Хорхордин // Наукові праці Донецького національного технічного університету.
Серія: Обчислювальна техніка та автоматизація. - 2012. - Випуск 23 (201). - С 70-76.
6. Батыр С.С. Построние модели сети передачи данных для исследования технологии AQM
AQM / С.С. Батыр, А.В, Хорхордин // Сборник научных трудов ДонИЖТ. – 2011. –
Выпуск 28. - С. 108-116.
7. Лозинская В.Н. Математические модели компонентов телекоммуникационніх систем /
В.Н. Лозинская // Наукові праці Донецького національного технічного університету.
Серія: Обчислювальна техніка та автоматизація. - 2013. - Випуск 1 (24). – С. 121-126.
References
1. International Telecommunication Union (2008), “ITU-T E.800 (09/2008): Quality of
telecommunication services: concepts, models, objectives and dependability planning – Terms
and definitions related to the quality of telecommunication services”, available at:
http://handle.itu.int/11.1002/1000/9524 (Accessed 29 April 2014).
2. Kutcherjavii, E.A. (2004), Upravlenie trafikom i kachestvo obslugivanija v seti Internet [Traffic
management and quality of service at Internet], Nauka i tehnika, Saint-Petersburb, Russia.
3. C.V. Hollot, Vishal Misra, Don Towsley and Wei-Bo Gong On Designing Improved
Controllers for AQM Routers Supporting TCP Flows /TO APPEARIN IEEE INFOCOM
2001,1. –avaible at: ftp://ftp.cs.umass.edu/pub/net/pub/MisraInfocom01-AQM-Controller.pdf
4. Adan Ivo and Jacques Resing (2002), “Queueing Theory”, available at:
http://www.win.tue.nl/~iadan/queueing.pdf (Accessed 29 April 2014).
5. Batyr S.S. Khorkhordin A.V.(2012) “An Empirical Mathematical Model for Part of the
Internet”, Naukovi pratsi Donetskogo natsionalnogo tehnichnogo univercitety.
Ser.:Obchysljuvalna technika ta avtomatyzatsija, vol.1, no. 23, pp. 70-76.
6. Batyr S.S. Khorkhordin A.V.(2011) “Build model of data network for AQM research”,. Sbornik
nauchnyh trudov DonIZT, vol.28, pp.108-116
7. Lozinskaya, V.N. (2013), “Mathematical models of telecommunication network components”,
Naukovi pratsi Donetskogo natsionalnogo tehnichnogo univercitety. Ser.:Obchysljuvalna
technika ta avtomatyzatsija, vol.1, no. 24, pp. 121-126.
Надійшла до редакції: Рецензент:
30.04.2014 д-р техн. наук, проф. Скобцов Ю.О.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
176
С.С. Батир, О.В. Хорхордин
ДВНЗ «Донецький національний технічний університет»
Особливості оцінювання ефективності методів управління чергою маршрутизатора.
Запропоновано методику оцінки та порівняння ефективності роботи методів управління
чергами маршрутизатора, як засобу управління трафіком в мережевому вузлі.
Представлені результати дозволяють наочно оцінити ефективність використання різних
методів в умовах, що змінюються. Дослідження проводилося на базі раніше розробленої
моделі сегмента мережі в просторі станів. Проведене порівняння підтвердило
ефективність розробленого методу управління з адаптацією до поточного навантаження.
Ключові слова: параметри якості обслуговування, маршрутизатор, чергу, управління
чергою, простір станів, метод управління, адаптація.
S.S. Batyr, A.V. Khorkhordin
Donetsk National Technical University
Features of evaluation of methods for router queue control. The article proposes a method for
evaluating and comparing the effectiveness of the methods of router queue control as a means of
managing traffic in a network node. The presented results allow a visual assessment of the
effectiveness of different methods in a changing environment. The study was conducted on the basis
of previously developed model of a network segment in state space. The comparison confirmed the
effectiveness of the developed control method of adapting to the current load.
Keywords: quality of service parameters, router queue, queue management, state space, control
method, adaptation.
Батыр Семён Сергеевич, Украина, закончил Донецкий
национальный технический университет, ассистент кафедры
автоматики и телекоммуникаций ГВУЗ «Донецкий национальный
технический университет» (ул. Артема, 58,
г. Донецк, 83001, Украина). Основное направление научной
деятельности – микропроцессорные системы управления, методы
управления передачей данных в телекоммуникационных сетях.
Хорхордин Александр Владимирович, Украина, закончил
Донецкий национальный технический университет, канд. техн.
наук, доцент, профессор кафедры автоматики и
телекоммуникаций ГВУЗ «Донецкий национальный технический
университет» (ул. Артема, 58, г. Донецк, 83001, Украина).
Основное направление научной деятельности – цифровые
системы управления, современная теория управления

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
177
Розділ 3 Інформаційно-вимірювальні системи,
електронні та мікропроцесорні прилади

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
© Вовна А.В., Зори А.А., 2014 178
УДК 543.421:621.38
А.В. Вовна (канд. техн. наук, доц.), А.А. Зори (д-р техн. наук, проф.) ГВУЗ «Донецкий национальный технический университет», г. Донецк
кафедра электронной техники e-mail: [email protected], [email protected]
ОПТИЧЕСКИЙ ИЗМЕРИТЕЛЬ КОНЦЕНТРАЦИИ МЕТАНА С АППАРАТНО-ПРОГРАММНОЙ КОМПЕНСАЦИЕЙ ТЕМПЕРАТУРНОГО ДРЕЙФА
Разработан и реализован экспериментальный образец оптического измерителя концентрации метана. Предложен способ аппаратно-программной компенсации температурного дрейфа оптического измерителя, в котором использован для аппаратной компенсации в качестве температурно-чувствительного элемента светодиод, а для программной – датчик температуры. Аппаратно-программная реализация разработанного способа позволила повысить его точность: величина дополнительной погрешности измерения концентрации метана обусловленной изменением температуры составила не более 0,09 об.%, что в 4,5 раза меньше требуемого значения по техническому заданию на разработку измерителя (не более 0,4 об.%). При этом, в диапазоне измерения концентрации метана от 0 до 4 об.% основная абсолютная погрешность не должна превышать 0,2 об.%, а дополнительная погрешность – удвоенного значения основной погрешности измерения. Ключевые слова: измеритель, метан, способ, компенсация, температура, погрешность.
Общая постановка проблемы Увеличение глубины разработок угля, возрастание частоты и интенсивности
газодинамических явлений, внезапных выбросов метана приводит к повышению вероятности возникновения взрывоопасной ситуации и ухудшения условий труда горняков. В условиях угольных шахт наличие агрессивной среды и большого количества дестабилизирующих факторов, влияющих на результат измерения (температура [1], запыленность [2], влажность и др.), не позволило до настоящего времени создать быстродействующие газоаналитические измерители с необходимыми показателями точности и метрологической надежности. В значительной степени эту проблему, возможно, решить с использованием новейших систем оптического контроля концентрации метана в горных выработках угольных шахт [3], которые основаны на современной информационно-измерительной технике. Следовательно, разработка и внедрение оптических измерителей для контроля концентрации газовых компонентов в реальном масштабе времени с требуемыми метрологическими характеристиками в атмосфере угольных шахт является актуальной проблемой.
Постановка задач исследования Целью работы является повышение точности измерителя концентрации метана путем
разработки способа аппаратно-программной компенсации температурного дрейфа его выходного сигнала, что позволит уменьшить доминирующую дополнительную погрешность измерения концентрации метана, обусловленную изменением температуры.
Для достижения цели поставлены и решены следующие задачи: – разработать и провести лабораторные испытания экспериментального образца
оптического измерителя концентрации метана; – оценить основную и дополнительную погрешности измерений концентрации метана; – разработать способ аппаратно-программной компенсации температурного дрейфа
выходного сигнала измерителя; – оценить точность предложенного способа компенсации температурного дрейфа.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
179
Результаты разработки и исследований Разработанный экспериментальный образец измерителя концентрации метана с
аппаратной компенсацией температурного дрейфа [1], включает: – измерительную оптическую кювету с однопроходной оптической ячейкой и линзами,
включающую светодиод Lms34LED и фотодиод Lms36PD с предусилителем, с длиной оптического пути 34 мм;
– компенсационную оптическую кювету с однопроходной оптической ячейкой и линзами, включающую светодиод Lms38LED и фотодиод Lms43PD с предусилителем, с длиной оптического пути 34 мм;
– аналоговые измерительные каналы, в составе: драйвера для светодиода; синхронного детектора; нормирующего усилителя с аналоговой компенсацией температурного дрейфа светодиодов Lms34LED и Lms38LED.
– четырехканальный 12-разрядный аналого-цифровой преобразователь с записью данных в персональный компьютер через USB порт (Arduino DUE).
Для компенсации температурного дрейфа выходных напряжений измерительного (ИК) и компенсационного (КК) каналов разработан способ [4] и устройство [5] его аппаратной компенсации. Для реализации данного способа использованы зависимости температурного дрейфа напряжения на светодиодах. При этом светодиоды питаются от импульсного источника тока, который имеет следующие характеристики:
1. Амплитуда ток накачки светодиода, А – измерительная ячейка Lms34LED – Lms36PD 1,0; – компенсационная ячейка Lms38LED – Lms43PD 0,77; 2. Длительность импульса, мкс 20; 3. Частота импульсной последовательности, Гц 500. Температурный дрейф выходных напряжений измерительного и компенсационного
каналов измерителя обусловлен температурной зависимостью интенсивности излучения светодиодов. С ростом температуры их интенсивность излучение падает, что обусловлено следующими причинами: безызлучательной рекомбинацией через глубокие примесные уровни; рекомбинацией на поверхности; потерей носителей в барьерных слоях гетероструктур. Температурная зависимость интенсивности излучения светодиодов является чисто феменологической, основанной практически на экспериментальных данных. При этом температурную зависимость интенсивности излучения светодиодов в узком диапазоне его рабочих температур описывают феменологическим уравнением вида [6]:
,300exp1
0
TKTТIТI (1)
где 0ТI – интенсивность излучения светодиода при температуре К3000 Т ; 1T – характеристическая температура конкретного светодиода.
При низких значениях характеристической температуры (менее 100 К) температурная зависимость интенсивности излучения светодиода достаточна велика. Для определения температурной зависимости светодиодов, используемых в измерителе концентрации метана, проведены лабораторные испытания ИК (LED34) и КК (LED38) [7] с использованием термостата. В ходе проведения испытаний получены характеристики преобразования выходных напряжений синхронных детекторов ИК и КК измерителя от температуры в диапазоне от +5 до +35С, графики которых приведены на рисунке 1. На рисунке 1 обозначено: – экспериментальные данные выходного напряжения синхронного детектора ИК от температуры; – КК от температуры; – результаты аппроксимации характеристик преобразования выходных напряжений синхронных детекторов ИК и КК от

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
180
температуры уравнением вида:
,expexp 01
000
1
00
CDCDCDCDCD k
TTTТUU
TTTТUТU (2)
где 0ТUCD – выходное напряжение синхронного детектора при температуре 0T , для ИК
С35К3080 T при этом В25,8350 СТU ИКCD , а для КК С30К3030 T при
этом В2,7300 СТU ККCD ;
1T – характеристическая температура для ИК LED34 К831 T , а для КК LED38 К951 T ;
CDU0 – постоянная составляющая выходного напряжения синхронного детектора, которая определена как произведение аппроксимирующего коэффициента CDk0 на 0ТUCD , при этом для ИК составляет 60,00 ИКCDk , а для КК – 61,00 ККCDk .
0 5 10 15 20 25 30 35Т,оС2,0
3,0
4,0
5,0
6,0
7,0UCD, B
ИК PD36 КК PD43
Рисунок 1 – Температурные характеристики выходных напряжений синхронных
детекторов ИК и КК измерителя в диапазоне температур от +5 до +35С Для аппаратной компенсации температурного дрейфа выходных напряжений
синхронных детекторов ИК и КК предложено [1] выполнять измерения падений напряжений на светодиодах, значение которых пропорциональны изменению температуры. Измерение падения напряжения на каждом из светодиодов осуществляется путем подачи импульса тока амплитудой 12 мА. Данное значение обеспечивает минимальный саморазогрев кристалла светодиода. Длительность импульса составляет 20 мкс при частоте импульсной последовательности 500 Гц. Основная и дополнительная импульсные последовательности синхронизированы и разнесены во времени.
Дополнительная импульсная последовательность после прохождения через светодиод детектируется по переднему фронту и поступает на дифференциальный усилитель с интегрирующей цепочкой на входе. Выходное напряжение дифференциального усилителя пропорционально температуре светодиода. При проведении лабораторных испытаний с использованием термостата получены характеристики преобразования напряжения светодиодов измерительного (LED34) и компенсационного (LED38) каналов измерителя от

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
181
температуры в диапазоне от +5 до +35С, графики которых приведены на рисунке 2. На рисунке 2 обозначено: – экспериментально данные напряжения от температуры для светодиода измерительного канала (ИК) LED34; – для светодиода компенсационного канала (КК) LED38; – результаты аппроксимации температурной характеристики напряжения светодиодов уравнением вида:
,0 TkUТU LEDLEDLED (3)
где B,65,3340 LEDU CB/036,034 LEDk – коэффициенты аппроксимации для ИК LED34; B,57,2380 LEDU CB/034,038 LEDk – для КК LED38.
0 5 10 15 20 25 30 35Т,оС1,0
1,5
2,0
2,5
3,0
3,5
4,0ULED, B
ИК LED34 КК LED38
Рисунок 2 – Температурные характеристики напряжения
светодиодов в диапазоне температур от +5 до +35С Полученные два сигнала напряжения: на выходе синхронного детектора канала и
падения напряжения на светодиоде, масштабируют с последующим вычитанием и масштабированием для цифровой обработки результатов измерений по следующему соотношению:
,,, 44 ТСUUТUKKТСU СНCDСМLEDLEDCСНВЫХ (4)
где 4СНС – измеряемая концентрация метана; ТULED – температурная характеристика падения напряжения на светодиоде; LEDC KK , – масштабирующие коэффициенты, которые исключают мультипликативную составляющую погрешности результатов измерения концентрации метана от температуры; для ИК 51,2ИКСК , 2,3ИКLEDK , а для КК 2,2ККСК , 4,2ИКLEDK ;
СМU – напряжение смещение, которое исключает аддитивную составляющую погрешности результатов измерения концентрации газа от температуры; для ИК
В53,1ИКСМU , а для КК .В42,0ККСМU При проведении лабораторных испытаний с использованием термостата получены
характеристики преобразования выходных напряжений ИК и КК измерителя от температуры

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
182
в диапазоне от +5 до +35С, графики которых приведены на рисунке 3. На рисунке 3 обозначено: – экспериментальные данные выходного напряжения ИК от температуры в диапазоне от +15 до +35С; – выходного напряжения КК от температуры LED38; ,
– результаты аппроксимации характеристик преобразования выходных напряжений по температуре ИК и КК, соответственно, уравнением вида:
,3
32
210 TaTaTaaТUВЫХ (5)
где ,мВ33,2020 ИКa ,СмВ/11,891 ИКa ,СмВ/047,2 22 ИКa 3
3 СмкВ/787,0 ИКa –коэффициенты аппроксимации выходного напряжения ИК от изменения температуры в диапазоне от + 5 до +35С; ,мВ32,1680 ККa ,СмВ/91,481 ККa ,СмВ/182,1 2
2 ККa 33 СмкВ/426,3 ККa –
выходного напряжения КК.
0 5 10 15 20 25 30 35Т,оС
0,2
0,4
0,6
0,8
1,0
UВЫХ, BИК ( ) KК ( )
Рисунок 3 – Характеристики преобразования выходных напряжений
ИК и КК измерителя в диапазоне температур от +5 до +35С (экспериментальные данные в диапазоне температур от +15 до +35С)
Для уменьшения влияния доминирующего дестабилизирующего фактора – изменение
температуры в диапазоне от +5 до +35С, предложено выполнять цифровую компенсацию температурного дрейфа выходных напряжений ИК и КК. Для ее реализации использованы характеристики преобразования по температуре выходных напряжений ИК и КК (см. рис. 3), которые аппроксимированы уравнением (5). Измерение температуры проводилось мультиметром цифровым универсальным UT71C с автоматической записью информации в персональный компьютер через USB-порт. Период опроса датчика температуры составлял 0,5 с.
По результатам измерений температуры T из массива выбираются значения выходных напряжений ИК ( ТU ИКкор ) и КК ( ТU ККкор ), которые вычитаются из результатов
измерений выходных напряжений ИКВЫХU и ККВЫХU , по следующей формуле:
,ТUUU корВЫХВЫХ (6)

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
183
где ВЫХU – выходное напряжение ИК и КК после аналоговой компенсации температурного дрейфа; ВЫХU – результирующее напряжение ИК и КК, с учетом цифровой компенсации температурного дрейфа, по значениям данных напряжений определяют измеряемую концентрацию метана; ТUкор – напряжение коррекции, величина которого зависит от температуры (см. рис. 3). Массивы выходных напряжений и температур предварительного занесены в память контроллера.
Характеристики преобразования выходных напряжений ИК и КК измерителя после цифровой компенсации температурного дрейфа в диапазоне температур от +15 до +35С приведены на рисунке 4.
Т,оС15 20 25 30 35
0,01
0,01
0,02
0,03
0,04
0
0,02
0,03
0,04
UВЫХ ИК, B
а)
Т,оС15 20 25 30 35
0,01
0,01
0,02
0,03
0,04
0
0,02
0,03
0,04
UВЫХ КК, B
б)
Рисунок 4 – Характеристики преобразования выходных напряжений ИК (а) и КК (б) измерителя после цифровой компенсации температурного дрейфа
в диапазоне температур от +15 до +35С

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
184
Для компенсации запыленности оптических каналов измерителя выполняют вычитание из результатов измерения выходных напряжений ИК и КК в соответствии с формулой [8, 9]:
,СМККВЫХИКВЫХпыльВЫХ UUКUU (7)
где K – масштабный коэффициент, величина которого равна 1; СМU – напряжение смещения, величина которого в проведенных опытах составляет 0 В.
График изменения результирующего выходного напряжения при компенсации запыленности оптических каналов измерителя концентрации метана приведен на рисунке 5.
Т,оС15 20 25 30 35
0,01
0,01
0,02
0,03
0,04
0
0,02
0,03
0,04
UВЫХ пыль, B
Рисунок 5 – График изменения результирующего выходного напряжения при
компенсации запыленности оптических каналов измерителя концентрации метана Для определения дополнительной погрешности обусловленной влиянием изменения
температуры выполнено приведение напряжения пыльВЫХU , при %0об.4 constССН , к
концентрации метана по следующей формуле:
,1ln1
04
ИК
пыльВЫХ
ИКСН U
Uk
С (8)
где 1об.%51,0
ИКk ; В49,00 ИКU – коэффициенты аппроксимации экспериментально определенной характеристики преобразования измерителя по метану.
Значение напряжения пыльВЫХU , приведенное к концентрации метана 4СНС , соответствует значению дополнительной погрешности измерения концентрации метана
4СНС от изменения температуры. Данные исследования проводились в диапазоне температур от +15 до +35С. График изменения дополнительной погрешности измерения концентрации метана, обусловленной изменением температуры в диапазоне от +15 до +35С приведен на рисунке 6.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
185
Т,оС15 20 25 30 35
0,10
0
0,10
ССН4, об.%
0,20
0,20
Рисунок 6 – График изменения дополнительной погрешности измерения
концентрации метана, обусловленной изменением температуры в диапазоне от+15 до +35С
Из анализа графика зависимости изменения дополнительной погрешности измерения
концентрации метана, обусловленной изменением температуры в диапазоне от +15 до +35С (см. рис. 6), следует:
– в рабочем диапазоне температур измерителя концентрации метана (255)С амплитудное значение шумовой составляющей выходного сигнала изменения концентрации метана не превышает 0,08 об.%, что с доверительной вероятностью 95,0Р соответствует
среднему квадратичному значению %04,02/08,0 об..4 оснСНС , которое в 5 раза
меньше абсолютного значения основной погрешности измерения концентрации метана (не более 0,2 об.%) [10];
– при расширении диапазона температур от +15 до +35С амплитудное значение шумовой составляющей выходного сигнала измерения концентрации не превышает 0,17 об.%, что с доверительной вероятностью 95,0Р соответствует среднему
квадратичному значению %09,02/18,0 об..4 допСНС , которое в 4,5 раза меньше
указанного значения в техническом задании на разработку измерителя (не более 0,4 об.%). Данное значение дополнительной погрешности измерения, обусловленной изменением дестабилизирующих факторов, не превышает удвоенного значения основной погрешности измерения [10].
Выводы 1. Разработан и реализован экспериментальный образец оптического измерителя
концентрации метана, который включает в себя: – измерительный и компенсационный оптические каналы, для реализации алгоритма
компенсации запыленности рудничной атмосферы угольных шахт; – аналоговые измерительные каналы, которые имеет в своем составе: драйвер для
светодиода; синхронный детектор; нормирующий усилитель с аналоговой компенсацией температурного дрейфа светодиодов Lms34LED и Lms38LED;
– четырехканальный 12-разрядный аналого-цифровой преобразователь с записью данных в персональный компьютер через USB порт (Arduino DUE).
2. Предложен способ аппаратно-программной компенсации температурного дрейфа

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
186
оптического измерителя, в котором использован для аппаратной компенсации в качестве температурно-чувствительного элемента светодиод, падение напряжения на котором пропорционально изменению температуры, а для программной компенсации – датчик температуры. Для реализации программной компенсации использованы характеристики преобразования по температуре выходных напряжений измерительных каналов экспериментального образца.
3. Аппаратно-программная реализация разработанного способа позволила повысить его точность: величина дополнительной погрешности измерения концентрации метана обусловленной изменением температуры составила не более 0,09 об.%, что в 4,5 раза меньше требуемого значения по техническому заданию на разработку измерителя (не более 0,4 об.%). При этом, в диапазоне измерения концентрации метана от 0 до 4 об.% основная абсолютной погрешностью не должна превышать 0,2 об.%, а дополнительная погрешность – удвоенного значения основной погрешности измерения.
Список использованной литературы 1. Вовна А.В. Разработка и исследование измерителя концентрации метана с аппаратной
компенсацией температуры / А.В. Вовна, А.А. Зори, И.Я. Лизан // Наукові праці Донецького національного технічного університету. Серія: «Обчислювальна техніка та автоматизація». – 2013. – Випуск 1(24)’2013. – С. 222 – 229.
2. Вовна О.В. Розробка методу компенсації вугільного пилу для інфрачервоного вимірювача концентрації метану / О.В. Вовна // Наукові праці Донецького національного технічного університету. Серія: «Обчислювальна техніка та автоматизація». – 2010. – Випуск 19 (171). – С. 41 – 47.
3. Молоковский И.А. Аппаратно-программный комплекс для центра технического обслуживания сети специального назначения / И.А. Молоковский, В.В. Турупалов // Наукові праці Донецького інституту залізничного транспорту Української державної академії залізничного транспорту. – 2013. – Випуск 33. – С. 119 – 125.
4. Спосіб вимірювання концентрації газів: Пат. 82534 U. Україна, МПК G 01 N 21/35 / О.В. Вовна, А.А. Зорі, В.Д. Коренєв, М.Г. Хламов; Державний вищий навчальний заклад «Донецькій національний технічний університет» (Україна). – № u201304754; заявл. 15.04.2013; опубл. 12.08.2013, Бюл. № 15.
5. Пристрій для вимірювання концентрації газів: Пат. 84219 U. Україна, МПК G 01 N 21/00 / О.В. Вовна, А.А. Зорі, В.Д. Коренєв, М.Г. Хламов; Державний вищий навчальний заклад «Донецькій національний технічний університет» (Україна). – № u201305529; заявл. 29.04.2013; опубл. 10.10.2013, Бюл. № 19.
6. Шуберт Ф. Светодиоды / Ф. Шуберт; пер. с англ. под ред. А.Э. Юновича. – 2-е изд. М.: ФИЗМАТЛИТ, 2008. – 496 с.
7. LED Microsensor NT [Электронный ресурс] / Mid-infrared LED-PD optopairs. – Электронные данные. – Режим доступа: http://ru.lmsnt.com. – Дата доступа: февраль 2014. – Загл. с экрана.
8. Okajima, H. Measurement of methane gas concentration using an infrared LED / H. Okajima, S. Kakuma, K. Uchida, Y. Wakimoto, K. Noda // International Joint Conference Digital Object Identifier: 10.1109/SICE.2006.315585. – 2006. – PP. 1652 – 1655.
9. Спосіб вимірювання концентрації метану в рудниковій атмосфері: Пат. 91795 С2. Україна, МПК G 01 N 21/35 / О.В. Вовна, А.А. Зорі, В.Д. Коренєв, М.Г. Хламов; Державний вищий навчальний заклад «Донецькій національний технічний університет» (Україна). – № a200906379; заявл. 19.06.2009; опубл. 25.08.2010, Бюл. № 8.
10. Приборы шахтные газоаналитические. Общие требования, методы испытания: ДСТУ ГОСТ 24032:2009. – [Действующий от 2009-02-01]. – К.: Держспоживстандарт, 2009. – 24 с.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
187
References 1. Vovna, A.V, Zori, A.A. and Lizan, I.Ya. (2013), “Development and research of the methane
concentration meter with hardware temperature compensation”, Naukovi praci Donec'kogo nacional'nogo tehnichnogo universytetu. Serija: «Obchysljuval'na tehnika ta avtomatyzacija», vol. 1, no. 24, pp. 222-229.
2. Vovna, A.V (2010), “Developing of the method of compensation of coal dust for the infra-red meter of methane concentration”, Naukovi praci Donec'kogo nacional'nogo tehnichnogo universytetu. Serija: “Obchysljuval'na tehnika ta avtomatyzacija”, vol. 19, no. 171, pp. 41-47.
3. Molokovskij, I.A. and Turupalov, V.V. (2013), “Hardware-software system for network maintenance center of special purposes”, Naukovі pracі Donec'kogo іnstitutu zalіznichnogo transportu Ukraїns'koї derzhavnoї akademії zalіznichnogo transportu, vol. 33, pp. 119-125.
4. Vovna, О.V., Zorі, А.A., Korenеv, V.D. and Khlamov, M.G. State Institute of Higher Education ”Donetsk National Technical University” under Ministry of Education and Science of Ukraine (2013), Sposib vymirjuvannja koncentracii' gaziv [Method for measurement of the gases concentration], State Register of Patents of Ukraine, Kiev, UA, Pat. № 82534.
5. Vovna, О.V., Zorі, А.A., Korenеv, V.D. and Khlamov, M.G. State Institute of Higher Education ”Donetsk National Technical University” under Ministry of Education and Science of Ukraine (2013), Prystrij dlja vymirjuvannja koncentracii' gaziv posib vymirjuvannja koncentracii' gaziv [Device for measurement of the gases concentration], State Register of Patents of Ukraine, Kiev, UA, Pat. № 84219.
6. Shubert, F. (2008), Svetodiody [The LEDs], Translated by Junovich A., FIZMATLIT, Moscow, Russia.
7. LED Microsensor NT (2014) Electronic Resources: finding resources by subject [Online], Retrieved from: http://ru.lmsnt.com (Accessed 10 February 2014).
8. Okajima, H., Kakuma, S., Uchida, K., Wakimoto, Y. and Noda, K. (2006) “Measurement of methane gas concentration using an infrared LED”, International Joint Conference Digital Object Identifier: 10.1109/SICE.2006.315585. – 2006. – рр. 1652 – 1655.
9. Vovna, О.V., Zorі, А.A., Korenеv, V.D. and Khlamov, M.G. State Institute of Higher Education ”Donetsk National Technical University” under Ministry of Education and Science of Ukraine (2010), Sposib vymirjuvannja koncentracii' gaziv [Method for measurement of the gases concentration], State Register of Patents of Ukraine, Kiev, UA, Pat. № 91795.
10. Ukraine Ministry of Coal Industry (2009), 24032:2009. Pribory shahtnye gazoanaliticheskie. Obshhie trebovanija, metody ispytanija [24032:2009 Mine gas analysis instruments. General requirements, test methods.], Ukraine Ministry of Coal Industry, Kiev, Ukraine.
Надійшла до редакції: Рецензент: 03.03.2014 д-р техн. наук, проф. Воронцов О.Г.
О.В. Вовна, А.А. Зорі ДВНЗ «Донецький національний технічний університет» Оптичний вимірювач концентрації метану з апаратно-програмною компенсацією температурного дрейфу. Розроблений та реалізований експериментальний зразок оптичного вимірювача концентрації метану. Запропонований спосіб апаратно-програмної компенсації температурного дрейфу оптичного вимірювача, в якому використаний для апаратної компенсації в якості температурно-чутливий елементу світлодіод, а для програмної – датчик температури. Апаратно-програмна реалізація розробленого способу дозволила підвищити його точність: величина додаткової похибки вимірювання концентрації метану, яку обумовлено зміною температури склала не більш 0,09 об.%, що в 4,5 рази менше необхідного значення за технічним завданням на розробку вимірювача (не

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
188
більш 0,4об.%). При цьому, в діапазоні вимірювання концентрації метану від 0 до 4 об.% основна абсолютна похибка не повинна перевищувати 0,2 об.%, а додаткова похибка – подвоєного значення основної похибки вимірювання. Ключові слова: вимірювач, метан, спосіб, компенсація, температура, похибка.
A.V. Vovna, A.A. Zori Donetsk National Technical University Optical measuring of methane concentration with hardware and software compensation for temperature drift. In the conditions of coal mines and in the presence of an aggressive environment, a large number of destabilizing factors affecting the result of measurements (temperature, dust, humidity, etc.) do not allow creating a fast gas analysis meter with necessary accuracy and performance. This problem can be solved using the latest systems of optical control of methane concentration in underground workings of coal mines, based on modern information and measurement technology. Consequently, the development and implementation of optical measuring instruments for monitoring the concentration of gas components in real-time is an important issue. We designed and implemented an experimental model of optical methane concentration meter. The sample consists of measuring and compensating optical channels used to implement a compensation algorithm for dusty coal mine atmosphere. The sample also includes analog measurement channels, which have: driver for LEDs; synchronous detector; normalizing amplifier with analog temperature drift compensation LEDs. Measuring information arrives on a 4-channel 12-bit analog-to-digital converter with recording data to a PC via USB port (Arduino DUE). The paper provides a method for hardware and software compensation for temperature drift of the optical measuring instrument, which is used for hardware compensation as the temperature-sensitive element LED, the voltage drop on which is proportional to the temperature change. To implement the program of compensation we used conversion temperature characteristics of experimental sample output voltage measuring channels. Hardware and software implementation of the developed method has allowed increasing its accuracy, the additional error of methane concentration measurement caused by changes in temperature was not more than 0.09 vol.% , which is 4.5 times less than the required value for the development of technical specifications for the meter (less than 0.4 vol.%). At the same time, in the range of measurement of methane concentration from 0 to 4 vol.% basic absolute error should not exceed 0.2 vol.%, and an additional error – twice the basic error of measurement. Keywords: measurer, methane, method, compensation, temperature, accuracy.
Вовна Александр Владимирович, Украина, закончил Донецкий национальный технический университет, канд. техн. наук, доцент, доцент кафедры электронной техники. ГВУЗ «Донецкий национальный технический университет» (ул. Артема, 58, г. Донецк, 83001, Украина). Основное направление научной деятельности – разработка, моделирование и исследование компьютеризированных информационно-измерительных систем аэрогазового контроля.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
© Жукова Н.В., Литвинов В.И., Голиков В.В., 2014 189
УДК 62-83.001.24
Н.В. Жукова (канд. техн. наук, доц.), В.И. Литвинов (канд. техн. наук), В.В. Голиков ГВУЗ «Донецкий национальный технический университет», г. Донецк
кафедра автоматики и телекоммуникаций e-mail: [email protected], [email protected], [email protected]
ЛАБОРАТОРНЫЙ СТЕНД РЕГУЛИРУЕМОГО ЛИНЕЙНОГО АСИНХРОННОГО ЭЛЕКТРОПРИВОДА – АНАЛОГА ЭЛЕКТРОПРИВОДА
ПОСТОЯННОГО ТОКА
Линейный асинхронный регулируемый электропривод с возможностью измерения электромагнитного момента выполнен в виде лабораторного стенда, состоящего из постоянного звена, IGBT-инвертора, блока драйверов с оптической развязкой, микропроцессорного блока управления, датчиков тока Холла и блока питания. В предлагаемом техническом решении, формируется результирующее вращающееся магнитное поле статора и ротора с постоянной амплитудой и конфигурацией при заданной частоте преобразователя. В этом случае электромагнитный момент максимален и зависит линейно только от относительной скорости движения результирующего поля машины и ротора в пределах двойной номинальной нагрузки и, соответственно, двойного скольжения. Для измерения электромагнитного момента выполнен стенд, состоящий из спаренных электродвигателей постоянного и переменного токов, фрикционного барабанного тормоза и тормоза, оснащенного динамометром, а также цифрового измерителя скорости ротора двигателя. Результаты эксперимента подтвердили полную аналогию разработанного асинхронного электропривода с электроприводом постоянного тока. Ключевые слова: микропроцессорный блок управления, драйвер, силовые ключи, инвертор, широтно-импульсный модулятор, алгоритм управления, спаренные электродвигатели, фрикционный барабанный тормоз, динамометр.
Введение Известно, что современный асинхронный электропривод [1-3] с векторным
управлением (VC) или прямым контролем электромагнитного момента (DTC), с вычислением последнего, является полным аналогом электропривода постоянного тока. Однако, с учетом базисных положений [4, 5], касающиеся электродвигателей асинхронного (AC) и постоянного тока (DC), можно утверждать, что это совершенно не так.
«В машине постоянного тока обмотка возбуждения расположена на статоре и поле возбуждения неподвижно. В якоре создаётся вращающееся поле, частота вращения которого равна частоте вращения ротора, а направление вращения поля противоположно вращению ротора. Поэтому поля статора и ротора в машине постоянного тока неподвижны относительно друг друга».
«Электромеханическое преобразование энергии в асинхронной машине осуществляется полями, неподвижными относительно друг друга, а результирующее поле создаётся полями статора и ротора. Ротор может вращаться с той же скоростью, что и поле, или с другой скоростью, однако поля ротора и статора в установившемся режиме неподвижны относительно друг друга».
В установившемся режиме в машине DC токи и поля якоря или ротора относительно якоря или ротора изменяются во времени, периодически меняя своё направление. Коллектор в якоре, коммутируя ток якоря, является его выпрямителем по отношению к внешней цепи.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
190
а)
Поэтому в установившемся режиме ток и поле якоря стационарны по отношению к неподвижному полю возбуждения машины постоянного тока.
Аналогично в установившемся режиме в машине AC ток и поле ротора относительно ротора изменяются во времени, периодически меняя своё направление. Но ток и поле ротора стационарны относительно вращающегося поля статора. Следовательно, асинхронная машина, как объект исследования, значительно упрощается, если рассматривать только относительное движение ротора и совместного магнитного поля статора и ротора. При этом магнитное поле асинхронной машины должно быть постоянной амплитуды и конфигурации при любой частоте его вращения.
В двигателях постоянного или переменного трёхфазного тока кондукционный ток в якоре или индукционный ток в короткозамкнутом роторе всегда находится в плоскости, перпендикуляр к которой ортогонален магнитному полю возбуждения или вращающемуся магнитному полю статора (рис.1, рис.2). То есть, главная полезная информация в геометрии взаимодействующих токов заключается в том, что плоскости этих взаимодействующих токов, введённых кондукционным или индукционным путём, должны быть всегда взаимноперпендикулярны. Только при такой конфигурации токов обеспечивается максимальный электромагнитный момент, что и сделано в машине постоянного тока или в асинхронной машине переменного тока. Это соответствует максимальному электромагнитному моменту ICМ ЭМ в пределах максимального тока якоря или
cScМ РпЭМ соответственно максимально допустимого скольжения в линейной области работы асинхронного двигателя.
Рисунок 1 – Магнитная система электродвигателя постоянного тока: а) магнитное поле токов
независимого возбуждения; б) магнитное поле токов якоря; в) реакция якоря
Рисунок 2 – Магнитная система асинхронного электродвигателя с одной парой полюсов
(амплитуда и форма магнитного поля кроме его частоты вращения остаются неизменными): а) магнитное поле токов статора; б) магнитное поле токов ротора; в) реакция ротора
а) б) в)
б) в)

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
191
Т.е. электромагнитный момент в двигателях постоянного или переменного тока (в линейной области скольжения) имеет простую линейную математическую зависимость от названных параметров. В этом заключается весь смысл применяемой авторами модели [6–9] асинхронной машины.
В существующих асинхронных электроприводах (ЭП) с векторным управлением или прямым контролем электромагнитного момента этот момент регулируется посредством изменения угла между магнитными потоками статора и ротора в асинхронной машине [1–3]. То есть, эти магнитные потоки подвижны относительно друг друга. Это совершенно не соответствует приведенным положениям [4, 5] относительно двух рассматриваемых двигателей. Достаточно напомнить [5], что «…поля, перемещающиеся относительно друг друга, не создают электромагнитного момента, а создают только поток тепловой энергии…». Таким образом, вышесказанное подтверждает, что существующий электропривод VC, DTC не является аналогом электропривода постоянного тока.
В работах [8, 9] подробно рассмотрены разработанные авторами основные блоки с принципиальными схемами регулируемого ЭП, посредством которого реализуется результирующее вращающееся магнитное поле статора и ротора с постоянной амплитудой и формой при заданной частоте преобразователя. При этом поле индуцированного тока ротора всегда перпендикулярно результирующему магнитному полю машины и электромагнитный момент можно измерить посредством простой линейной зависимости cSffcМ Рэм П ,
что делает разработанный асинхронный ЭП полным аналогом электропривода постоянного тока [8, 9]. На рис. 3а,б показаны фотографии основных блоков разработанного частотного преобразователя, приведенных в [8, 9].
Рисунок 3.а – Лабораторный стенд линейного асинхронного регулируемого электропривода
Рисунок 3.б – Лабораторный стенд линейного асинхронного регулируемого электропривода

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
192
Цель и задачи исследования Целью данной статьи, которая продолжает работы [8, 9], является проведение
измерений электромагнитного момента асинхронной машины эм.АСM в различных стандартных режимах и подтверждения линейного режима работы разработанного асинхронного регулируемого электропривода в пределах двойной номинальной нагрузки, и соответственно, двойного номинального скольжения. Для достижения данной цели авторами выполнен стенд для измерения электромагнитного момента предлагаемого асинхронного электропривода, состоящего из спаренных электродвигателей постоянного и переменного токов, фрикционного барабанного тормоза и тормоза, оснащенного динамометром, а также цифрового измерителя скорости вращения ротора электродвигателя. На рис.4, 5 показаны принципиальная схема и фотография, выполненного авторами, стенда, а на рис.6 схема цифрового измерителя скорости вращения ротора электродвигателя.
Рисунок 4 – Схема стенда для измерения электромагнитного момента и скорости вращения асинхронного электропривода
Рисунок 5 – Стенд для измерения электромагнитного момента

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
193
Рисунок 6 – Принципиальная схема измерителя скорости вращения ротора асинхронного электродвигателя
Известно, что измерение электромагнитного момента возможно [10, 11] с помощью электромагнитного тормоза, электродинамического тормоза и фрикционного барабанного тормоза с динамометром. Последний необходим при измерении момента при заторможенном роторе, что соответствует тяжёлому режиму работы асинхронной машины, так как электромагнитный тормоз в данном режиме не работает. На рис.7, 8 показаны общий вид фрикционного барабанного тормоза с динамометром и фотография его исполнения на стенде измерения электромагнитного момента.
Рисунок 7 – Измерение момента силы, создаваемого электродвигателем

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
194
Рисунок 8 – Измерение электромагнитного момента асинхронного электродвигателя с помощью динамометра
На стенд установлены механически связанные (спаренные) электродвигатели (рис. 5): - асинхронный с номинальными данными: 0,37кВт, Y/ 220/380В; 1,94/1,12 А;
1375 об/мин с двумя парами полюсов ( р =2), 57,213752
60370M эм.ном.АС
Нм,
08333,260
137560
1500Sном РП ff Гц;
- постоянного тока типа П12 со смешанным возбуждением при отключенной серийсной обмотке и номинальных его параметрах номP =450 Вт, номU =220 В, номI =2.88 A,
номN =1500 об/мин, 865,2252
450M эм.ном.DC
Нм. Исходя из номинальных данных DC
П12 константа машины С 1 Вс, тогда 1А соответствует 1 Нм. В результате отключения серийсной обмотки эта константа будет несколько ниже в динамическом режиме;
- динамометр типа KN-01 (X10NGYING), 0…..8 кг, e =50 гр. При исследовании введены следующие обозначения: f - частота преобразователя, Гц;
Пf - частота вращения поля машины AС, Гц;
Рf - частота вращения ротора машины AС, Гц; S - величина абсолютного скольжения ÐÏ ffS , Гц; р - число пар полюсов;
СПxxS . - скольжение холостого хода спаренной машины, Гц;
ПЗU - напряжение постоянного звена, В;
ПЗI - ток постоянного звена, А;
ЯU - напряжение якоря машины DC, В;
ЯI - ток якоря машины DC, А;
СПххCМ . - момент сопротивления холостого хода спаренной машины, Нм;
.динМ - момент сопротивления динамометра, Нм;
эм.АСM - электромагнитный момент машины AС, Нм;
эм.DСM - электромагнитный момент машины DC, Нм.
ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
195
Решение задач и результаты эксперимента Электромагнитный момент асинхронной машины измерялся в разных режимах.
Проведенные исследования состоят из нескольких пунктов. 1. Определение момента сопротивления холостого хода спаренной машины. В измерениях электромагнитного момента асинхронной машины в качестве
составляющей должен учитываться момент сопротивления холостого хода спаренной машины СПххCМ . . Этот момент определялся при отдельном включении машин AC и DC. Измерения показали, что при включенной машине АС и отключенной машине DC, СПххCМ . одинаковый для разных частот f преобразователя и соответствует абсолютному
скольжению 5,0. РРПСПxx fpfffS Гц, тогда
ГцНмГцМ СПххC 08333,2
57,25,0. 0,618Нм.
При включенной машине DC и отключенной машине АС СПххCМ . соответствует ЯI = 0,9 А, что завышено по отношению к первому случаю. Это свидетельствует о том, что отключение серийсной обмотки понизило константу машины DC. В связи с тем, что сопротивление холостого хода спаренной машины не изменяется, было принято что, ток якоря ЯI 0,9 А соответствует 0,618 Нм.
2. Измерение электромагнитного момента асинхронной машины эм.АСM в заторможенном режиме.
При заторможенном роторе ( 4f Гц, 2Пf Гц, 0Рf ), соответствующем напряжении постоянного звена ПЗU , полученном при холостом ходе асинхронной машины по графикам [8, 9], появляется номинальный момент эм.ном.АСM в асинхронном электродвигателе, которому противодействует момент сопротивления спаренной системы
СПххCМ . и сопротивление динамометра .динМ :
56,212,081,965,1618,0M2.. эм.ном.АС м
смкгНмММ динСПххC Нм.
Отсюда видно соответствие паспортных данных асинхронного двигателя и разработанного регулируемого асинхронного электропривода эм.ном.АСэм.АС MM , а именно: 56,2 Нм 57,2 Нм.
Аналогичным образом определяется электромагнитный момент для двигателя постоянного тока в заторможенном режиме:
85,212,081,99,1618,0M2.. эм.ном.DС м
смкгНмММ динСПххC Нм,
что соответствует паспортным данным: 85,2 Нм 86,2 Нм. Таким образом, в спаренном состоянии в заторможенном режиме постоянные машин электродвигателей АС и DC соответствуют друг другу.
При двойном номинале тока машины DC в заторможенном режиме, устанавливая ток якоря ЯI выше номинала 5 А, что должно соответствовать электромагнитному моменту
5 Нм, а по факту же получается 03,4618,012,081,99,22
Нммсмкг Нм. Поэтому
измерение электромагнитного момента асинхронной машины эм.АСM посредством двигателя DC ограничивается в пределах номинального значения тока якоря номII я .
3. Измерение электромагнитного момента асинхронной машины эм.АСM в двигательном режиме.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
196
Электродвигатель постоянного тока используется в генераторном режиме. В связи с тем, что при малых оборотах генератора DC его ЭДС мала, измерения проводились от нижней границы частоты поля Пf , при которой возможно компенсировать хотя бы половину номинала электромагнитного момента 57,2Mэм.ном.АС Нм. Измерения проводились от нижней границы 10f Гц, 5Пf Гц, 4,3Рf Гц, 61,S Гц, 0НR Ом,
4,1яI А:
яСПCГцS IcMSc xx.6.1эм.AСM ;
НмАВсНмНмГцS 02,24,11618,003,2M 6.1эм.AС , т.е 03,2 Нм 02,2 Нм.
Такое же значение электромагнитного момента асинхронной машины повторяется на разных частотах ротора Рf при частоте преобразователя 10f , ….26 Гц с шагом 2 Гц. Подбирая нагрузкой ток якоря 1,4…1,5 А в выше указанном диапазоне f , всегда наблюдается скольжение, равное 1,6 Гц, что подтверждает линейный режим работы разработанного асинхронного электропривода.
4. Измерение электромагнитного момента асинхронной машины эм.АСM в режиме положительного и последующего отрицательного скольжения при двигательном режиме машины постоянного тока.
Измерения проводились при частоте преобразователя 4f , ….20 Гц с шагом 2 Гц: при 4f Гц, 2Пf Гц, 5,1Pf Гц, 5,0S Гц, соответствующих ПЗU и 9,1ПЗI А,
устанавливаем 9,0яI А, при котором скольжение становится равным 0S Гц. Дальнейшее повышение тока якоря от 3....2яI А приводит к отрицательному скольжению от 50,S Гц до 1S Гц.
при 20f Гц, 10Пf Гц, 59,fP Гц, 50,S Гц, соответствующих ПЗU и 9,1ПЗI А, устанавливаем 9,0яI А, при котором 0S Гц. Дальнейшее повышение тока
якоря от 3....2яI А приводит к таким же результатам по отрицательному скольжению от 50,S Гц до 1S Гц.
Данные измерения подтверждают симметричность и линейность предложенной асинхронной регулируемой машины не только в положительной, но и в отрицательной области скольжения.
5. Режим тяжело нагруженных машин – двойная номинальная нагрузка при заторможенном роторе машины АС.
Двойной номинал нагрузки при заторможенном роторе требует установки двойного номинала тока постоянного звена 4ПЗI А при двойном номинальном скольжении
4S Гц соответственно стационарной механической характеристике асинхронной машины (рис.10).
При 8f Гц, 4Ïf Гц, 0Pf Гц, 4S Гц, появляется двойной номинальный момент ном.АС эм.2M в асинхронном электродвигателе, который равен
23,512,081,945,4M2ном.АС эм.2 м
смкг Нм, что соответствует эм.ном.АСM2 , а именно:
57,22 Нм 23,5 Нм; 14,5 Нм 23,5 Нм. 6. Особенности поведения разработанного ЭП. Эксперимент показал, что для выбранного двигателя с барабанным фрикционным
тормозом в рабочем диапазоне частот и силе тока постоянного звена около двух ампер на холостом ходу электродвигателя, этот ток при появлении нагрузки на валу двигателя не

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
197
увеличивается, он наоборот уменьшается на 10-20%, что положительно влияет на динамику электропривода. При этом электропривод работает устойчиво. Такое качественно новое поведение в работе предлагаемого электропривода можно сравнить с последовательно включёнными индуктивностью и ёмкостью, которые имеют минимальное сопротивление в режиме резонанса напряжений, а при появлении проводящего магнитопровода (нагрузки) внутри катушки индуктивности, как показывает практика, ток падает почти в два раза.
Данную особенность резонансного поведения ЭП необходимо в дальнейшем более детально изучить с точки зрения выбора оптимальной частоты модуляции ШИМ [8, 9].
7. Сравнительный анализ электромагнитного момента, полученного по модели разработанного линейного асинхронного ЭП с известной математической зависимостью.
Известно [12, 13], что стационарная механическая характеристика асинхронного двигателя имеет явно нелинейный вид (рис.10). Она имеет короткий линейный участок на начальном отрезке относительного скольжения, не превышающего 5…8% от единичного скольжения. Длины этого отрезка вполне достаточно, чтобы на этом участке организовать линейный регулируемый электропривод при условии получения вращающегося магнитного поля с постоянной амплитудой и конфигурацией для текущей частоты преобразователя [6–9].
Рисунок 10 – Зависимость тока и момента асинхронного электродвигателя от скольжения
Сравним известное [13] выражение электромагнитного момента эм.АСM :
2
211
22
11
2211
эм.АСM
xcxSrcr
SrUm
,
при 1S равное:
Src
Um
221
211
эм.АСM
, (1)
с выражением, полученным по предлагаемой авторами линейной модели асинхронного электродвигателя [7], а именно:
.нагрP
ПР
MIrlBpdt
dJ
rlBrlBRIdtdIL
.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
198
В стационарных условиях электромагнитный момент IrlBp эм.АСM имеет вид:
РПrlBR
p 2эм.АС
1M , где rlBR РП 1I .
Известно, что для индуктивной нагрузки имеет место выражение:
)()()()()( tUdt
tdILtIRdt
tdtIR
,
или
tUtLRItLItRI 022
000 sincossin ,
где RLtg
, 220
0LR
UI
- амплитуда синусоидального тока в фазной обмотке,
0CIB , rlC 1 . Тогда
отнотнР
ПРП SI
RcSIc
RcIc
Rcp 2
020
2212
02
21
эм.АС ppM ,
отнSRL
URc
222
20
эм.АСM
. (2)
Сравнивая (1) и (2) можно сделать вывод, что выражения для электромагнитных моментов практически одинаковые, если учесть, что (1) в [13] записано для номинальной частоты двигателя.
Выводы 1. Для измерения электромагнитного момента асинхронного электропривода выполнен
стенд, состоящий из спаренных электродвигателей постоянного и переменного токов, фрикционного барабанного тормоза и тормоза, оснащенного динамометром, а также цифрового измерителя скорости вращения ротора электродвигателя.
2. Выполнены измерения электромагнитного момента асинхронной машины в различных стандартных режимах: при заторможенном роторе с номинальной и двойной номинальной нагрузкой, при положительном или отрицательном скольжении ротора по отношению к скорости вращения магнитного поля машины. Результаты измерений показали, что предлагаемый электропривод имеет электромагнитный момент, линейно зависящий от скольжения между скоростью вращения поля статора и скоростью ротора. Коэффициент пропорциональности равен константе машины.
3. Сравнительный анализ электромагнитного момента, полученного по математической модели разработанного линейного асинхронного электропривода, с известной математической зависимостью электромагнитного момента от скольжения показал, что модель линейна в пределах двойной номинальной нагрузки, и соответственно, двойного номинального скольжения.
4. Выявлена особенность резонансного поведения разработанного электропривода, заключающаяся в том, что в рабочем диапазоне частот преобразователя и силе тока постоянного звена, равному тройному фазному току холостого хода электродвигателя, этот ток при появлении нагрузки на валу электродвигателя не увеличивается, а даже уменьшается на 10-20%. Изучение вышеназванной особенности работы электропривода с точки зрения выбора оптимальной резонансной частоты модуляции ШИМ будет рассмотрено авторами в последующих работах.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
199
Список использованной литературы 1. Ишханов П. Э. Исследование электромагнитных процессов в асинхронном
электродвигателе с преобразователем частоты / П. Э. Ишханов, А.М. Чуриков // Приводная техника. - 1998. - №3. - С.12-16.
2. Соколовский Г. Г. Электроприводы переменного тока с частотным регулированием: учеб. / Соколовский Г. Г. - [2-е изд., испр.]. - М.: Издательский центр «Академия», 2007. – 272 с.
3. Усольцев А. А. Частотное управление асинхронными двигателями: учеб. пособие / Усольцев А. А. – СпбГУ: ИТМО, 2006. - 94 с.
4. Копылов И.П. Электрические машины: учеб. / И.П. Копылов - [4-е изд., испр.]. - М.: Высш. шк., 2004. - 607с.
5. Копылов И.П. Математическое моделирование электрических машин: учеб. / И.П. Копылов. - [3-е изд., перераб. и доп.]. - М.: Высш. шк., 2001. - 327с.
6. Лінійний асинхронний регульований електропривод: патент на винахід № 92712 C2: МПК HO2P 9/00 / Жукова Н.В., Литвинов В.І., Литвинова Т.С.; власник патенту Жукова Н.В., Литвинов В.І., Литвинова Т.С. - № а200901158; заявл. 13.02.2009; опубл. 25.11.2010, Бюл. №22.
7. Жукова Н.В. Асинхронный регулируемый электропривод на основе его линейной модели / Н.В. Жукова // Електротехніка та енергетика: Зб. наук. праць Донецького національного технічного університету. – 2011. – Вип. 11(186) - С. 125 – 132.
8. Жукова Н.В. Лабораторный стенд регулируемого линейного асинхронного электропривода / Н.В. Жукова, В.И. Литвинов, В.В. Голиков // Обчислювальна техніка та автоматика: Зб. наук. праць Донецького національного технічного університету. – 2013. – Вип. 2(25). - С. 207–216.
9. Лінійний асинхронний регульований електропривод: патент на винахід № 104919 C2: МПК HO2P 9/46 /Жукова Н.В., Литвинов В.І., Литвинова Т.С., Голиков В.В.; власник патенту Жукова Н.В., Литвинов В.І., Литвинова Т.С., Голиков В.В. - № а201206027; заявл. 18.05.2012; опубл. 25.03.2014, Бюл. № 6.
10. Перельмутер Н. М. Электромонтёр - обмотчик и изолировщик по ремонту электрических машин: учеб. / Н. М. Перельмутер. – М.: Высш. школа, 1980. – 220 с.
11. Кацман М. М. Руководство к лабораторным работам по электрическим машинам и электроприводу: учеб. пособие / М. М. Кацман. – [2-е изд., испр.]. - М.: Высш. шк., 2001. - 215 с.
12. Cправочник по электрическим машинам Т 1. / под общей ред. И.П. Копылова и Б. К. Клокова. - М.:Энергоатомиздат, 1988. – 456 с.
13. Токарев Б.Ф. Электрические машины: учеб. пособие / Б.Ф. Токарев. - М.: Энергоатомиздат, 1990. – 624 с.
References 1. Ishhanov, P. Je. and Churikov, A.M. (1998), “Research of electromagnetic processes in the
asynchronous motor with frequency converter”, Privodnaja tehnika, no.3, pp. 12-16. 2. Sokolovskij, G. G. (2007), Jelektroprivody peremennogo toka s chastotnym regulirovaniem
[AC drives with frequency control], 2nd ed., Akademija, Moscow, Russia. 3. Usol'cev, A. A. (2006), Chastotnoe upravlenie asinhronnymi dvigateljami [Frequency control
of asynchronous motors], SPbGU ITMO, St. Petersburg, Russia. 4. Kopylov, I.P. (2004), Jelektricheskie mashiny [Electrical machines], 4nd ed., Vyssh. shk.,
Moscow, Russia. 5. Kopylov, I.P. (2001), Matematicheskoe modelirovanie jelektricheskih mashin [Mathematical
modeling of electrical machines], 3nd ed., Vyssh. shk., Moscow, Russia.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
200
6. Zhukova, N.V., Litvinov, V.І. and Litvinova, T.S. Zhukova, N.V., Litvinov, V.І., Litvinova, T.S. (2010), Lіnіjnij asinhronnij regul'ovanij elektroprivod [Linear asynchronous regulated electric drive], State Register of Patents of Ukraine, Kiev, UA, Pat. № 92712 C2.
7. Zhukova, N.V. (2011), “Asynchronous electric drive based on its linear model”, Naukovі pracі DonNTU, no. 11(186), pp. 125 – 132.
8. Zhukova, N.V., Litvinov, V.І. and Golikov, V.V. (2011), “Laboratory bench of controlled linear asynchronous electric drive”, Naukovі pracі DonNTU, no. 2 (25), pp. 207–216.
9. Zhukova, N.V., Litvinov, V.І., Litvinova, T.S. and Golikov V.V. Zhukova, N.V., Litvinov, V.І., Litvinova, T.S., Golikov V.V. (2014), Lіnіjnij asinhronnij regul'ovanij elektroprivod [Linear asynchronous regulated electric drive], State Register of Patents of Ukraine, Kiev, UA, Pat. № 104919 C2.
10. Perel'muter, N. M. (1980), Jelektromontjor - obmotchik i izolirovshhik po remontu jelektricheskih mashin [Electrician and insulation worker for repair of electrical machines], Vyssh. shk., Moscow, Russia.
11. Kacman, M. M. (2001), Rukovodstvo k laboratornym rabotam po jelektricheskim mashinam i jelektroprivodu [Manual for laboratory works on electric machines and electric drive], 2nd ed., Vyssh. shk., Moscow, Russia.
12. Kopylov, I.P. (ed.) (1988), Cpravochnik po jelektricheskim mashinam [Reference book on electric machines], Jenergoatomizdat, Moscow, Russia.
13. Tokarev, B.F. (1990), Jelektricheskie mashiny [Electrical machines], Jenergoatomizdat, Moscow, Russia.
Надійшла до редакції: Рецензент: 30.04.2014 д-р техн. наук, проф. Зорі А.А.
Н.В. Жукова, В.І. Литвинов, В.В. Голиков ДВНЗ «Донецький національний технічний університет» Лабораторний стенд регульованого лінійного асинхронного електроприводу – аналога електроприводу постійного струму. Лінійний асинхронний регульований електропривод з можливістю виміру електромагнітного моменту виконаний у вигляді лабораторного стенду, що складається з постійної ланки, IGBT-інвертора, блоку драйверів з оптичною розв'язкою, мікропроцесорного блоку управління, датчиків струму Холла і блоку живлення. У пропонованому технічному рішенні, формується результуюче обертове магнітне поле статора і ротора з постійною амплітудою і конфігурацією при заданій частоті перетворювача. У цьому випадку електромагнітний момент максимальний і залежить лінійно тільки від відносної швидкості руху результуючого поля машини і ротора в межах подвійного номінального навантаження і, відповідно, подвійного ковзання. Для вимірювання електромагнітного моменту виконаний стенд, що складається з спарених електродвигунів постійного і змінного струмів, фрикційного барабанного гальма і гальма, оснащеного динамометром, а також цифрового вимірювача швидкості ротора двигуна. Результати експерименту підтвердили повну аналогію розробленого асинхронного електроприводу з електроприводом постійного струму. Ключові слова: мікропроцесорний блок керування, драйвер, силові ключі, інвертор, широтно-імпульсний модулятор, алгоритм управління, спарені електродвигуни, фрикційне барабанне гальмо, динамометр.
N.V. Zhukova, V.I. Litvinov, V.V. Golikov Donetsk National Technical University Laboratory bench of controlled linear asynchronous electric drive – analog of DC-drive. This article presents a laboratory bench of controlled linear asynchronous electric drive, which is similar to DC drive.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
201
The research carried on the bench focuses on proof of this assertion. This article shows the photos of a laboratory bench of the linear asynchronous electric drive developed by the authors. In the proposed technical solution resulting rotating magnetic field of the stator and rotor with constant amplitude and configuration is formed, with the ability to change its speed. In this case, the electromagnetic torque is a maximum and depends linearly on the relative velocity of the resulting field of electric machine and rotor within the limits of double rated load and, respectively, dual sliding. To measure the electromagnetic torque a bench is made, consisting of twin motors of DC and AC, a friction drum and a brake equipped with a dynamometer and digital measuring device of speed rotor. The measurements of the electromagnetic torque of the asynchronous machine in various standard modes were made: with locked rotor, with positive or negative slip of the rotor with respect to the field of the machine and in the mode of heavily laden machines. The measurement results showed that the proposed electric drive has the electromagnetic torque linearly dependent on the slip between the rotational speed of the stator field and rotor speed. The proportionality coefficient is equal to the constant of machine. The comparative analysis of the electromagnetic torque, which was obtained on a mathematical model of a linear asynchronous electric drive, with a known mathematical dependence of electromagnetic torque from slipping, showed that the model is linear within the limits of double rated load and, respectively, dual slipping. Keywords: microprocessor control unit, driver, power switches, inverter, PWM control algorithm, twin motors, friction drum brake, dynamometer.
Жукова Наталья Викторовна, Украина, закончила Донецкий государственный технический университет, канд. техн. наук, доцент, доцент кафедры автоматики и телекоммуникаций ГВУЗ «Донецкий национальный технический университет» (ул. Артема, 58, г. Донецк, 83001, Украина). Основное направление научной деятельности – автоматизация, электропривод непрерывных прокатных станов, моделирование и управление технологическими процессами.
Литвинов Виктор Иванович, Украина, закончил Донецкий государственный университет (ДонГУ), специальность физика, канд. техн. наук. Основное направление научной деятельности – механическое оборудование, обработка металлов давлением, электропривод непрерывных прокатных станов.
Голиков Владимир Владимирович, Украина, закончил Донецкий национальный технический университет, специалист по компьютеризированным системам управления и автоматики. Основное направление научной деятельности – встроенные системы управления, микропроцессорная техника.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
© Кузнецов Д.Н., Чупис Д.А., 2014 202
УДК 53.088
Д.Н. Кузнецов (канд. техн. наук, доц.), Д.А. Чупис (аспирант) ГВУЗ «Донецкий национальный технический университет», г. Донецк
кафедра электронной техники e-mail: [email protected]
ИССЛЕДОВАНИЕ ФИЗИЧЕСКОЙ МОДЕЛИ СТУПЕНЧАТОГО ИСПЫТАТЕЛЬНОГО ВОЗДЕЙСТВИЯ ДЛЯ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ
ХАРАКТЕРИСТИК ТЕРМОПРЕОБРАЗОВАТЕЛЕЙ
Выполнено экспериментальное исследование воздушного потока в рабочей части аэродинамического стенда, реализующего физическую модель ступенчатого испытательного воздействия для определения динамических характеристик термопреобразователей. Определены границы пространственной области, пригодной для динамической градуировки с учетом допустимых неравномерности профиля средней скорости, уровня пульсаций скорости и моментов распределения высших порядков. Предложена методика выполнения динамической градуировки. Ключевые слова: термопреобразователь, динамические характеристики, физическая модель, термоанемометр, градуировка, аэродинамическая труба.
Общая постановка проблемы Технические средства и методы решения задач обеспечения единства динамических
измерений, в частности динамических измерений температуры и скорости тепловым методом, принципиально отличаются от средств и методов, применяемых для решения аналогичных задач метрологического обеспечения статических измерений. Это связано, прежде всего, с необходимостью воспроизведения и подачи на вход исследуемого средства измерения (СИ) переменного испытательного сигнала с известными амплитудными и временными (частотными) параметрами, или синхронного сличения с эталонным СИ, инерционные характеристики (быстродействие) которого заранее известны и заведомо превышают аналогичные характеристики исследуемого СИ.
Характерным динамическим свойством термопреобразователей, которое обуславливает динамическую составляющую погрешности измерения, является тепловая инерция [1]. Способы динамической градуировки разделяют на прямые и косвенные. При реализации косвенных (электрических и др.) методов значительно сложнее создать модель тестового воздействия, корректно отражающую свойства СИ в реальных условиях эксплуатации. Прямые же методы позволяют создать физическую модель, лишенную данного недостатка. Устройства, реализующие прямые методы, позволяют на выходе исследуемого средства измерений получить сигнал, непосредственно представляющий искомую характеристику. Следовательно, преимущество следует отдавать прямым методам, при которых динамические характеристики находят с помощью ступенчатого, дельта-импульсного и гармонического испытательных воздействий [2].
Реализация физической модели испытательного сигнала для измерителей скорости и температуры потоков воздуха может быть обеспечена с помощью аэродинамических установок – генераторов специальных сигналов, которые по своей конструкции и принципам действия существенно отличаются от аналогичных средств и методов, используемых при измерениях, проводимых в статическом режиме (например, термостатов или ампул для воспроизведения реперных точек термодинамической шкалы).

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
203
Высокая стоимость эталонного оборудования и несовершенство нормативной и методической базы в этой области динамических измерений, приводят к тому, что отечественные и иностранные производители рабочих СИ часто не указывают динамические характеристики в эксплуатационной документации и не включают их в число нормируемых, тем самым ограничивая применение этих приборов в качестве СИ переменных величин.
Постановка задач исследования Для решения задачи определения динамических характеристик (ДХ)
термопреобразователей на кафедре электронной техники Донецкого национального технического университета совместно с кафедрой Физики неравновесных процессов, метрологии и экологии Донецкого национального университета создан комплекс технических средств, позволяющих экспериментально определять ДХ датчиков температуры и скорости газовых потоков и оценивать влияние на ДХ условий проведения измерений (температуры и скорости), а так же конструктивных особенностей и материалов исследуемых преобразователей.
Одна из разработанных установок предназначена для реализации физической модели ступенчатого тестового воздействия в условиях вынужденного конвективного теплообмена и исследования влияния условий теплообмена измерительного преобразователя (ИП) на динамическую составляющую погрешности СИ в условиях, приближенных к реальным условиям эксплуатации датчиков. Установка представляет собой аэродинамическую трубу разомкнутого типа для создания стратифицированного (разделенного на слои) двухслойного потока воздуха с заданными параметрами скорости и температуры, изменяющимися по закону функции Хевисайда (ступенчатое воздействие). В рабочей части стенда формируется поток с прямоугольным профилем скорости, малыми пульсациями скорости и минимальным размером переходной зоны между стратами (слоями). При проведения исследований датчик переносят из одной страты в другую за время на порядок меньшее предполагаемой его постоянной времени и регистрируют переходную функцию на выходе СИ.
Задачами исследований являются: 1. Определение характеристик потока воздуха в рабочей области аэродинамического
стенда (АС). 2 Установление границ пространственной области потока аэродинамического стенда,
пригодной для динамической градуировки СИ. 3 Разработка методики динамической градуировки СИ. Решение задач и результаты исследований Требования к характеристикам потока в рабочей части аэродинамических труб
определяет МИ 2000–89. Согласно данному документу, предварительно должны быть определены следующие параметры:
- геометрические параметры сопла и система координат, представленные на рисунке 1; - параметры координатного устройства: дискретность позиционирования 0,05 мм;
погрешность позиционирования ±0,025 мм; - диапазон рабочих скоростей: от 0,5 м/с до 11 м/с; В качестве СИ скорости использован термоанемометр постоянной температуры с
проволочным первичным измерительным преобразователем (ПИП) с диаметром нити 8 мкм, практически не вносящим возмущений в тонкую структуру потока. Относительная погрешность измерения скорости не более δv = ±2%. Для предполагаемого характерного спектра пульсаций скорости до 1 кГц выбрана полоса пропускания измерительного канала 3 кГц.
Для определения границ пространственной области потока аэродинамического стенда, пригодной для градуировки СИ исследованы градиенты полей средней скорости по оси рабочей части стенда, а так же характеристики турбулентности (пульсаций скорости) в потоке.
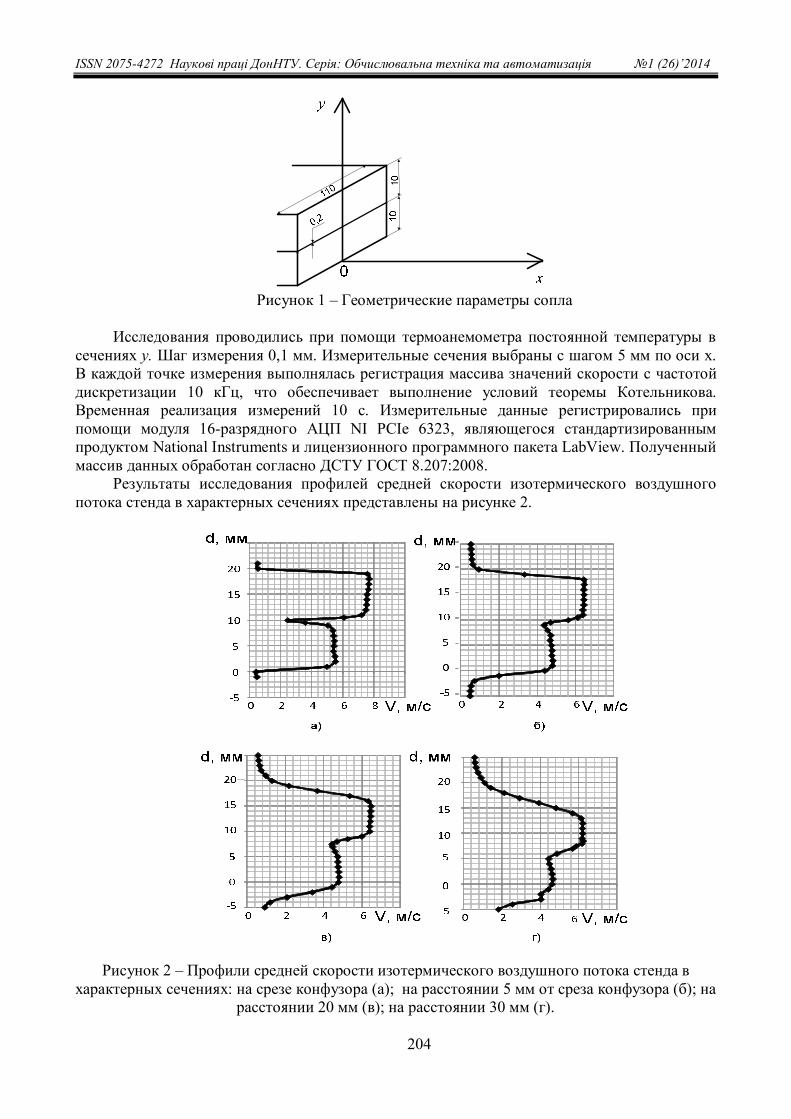
ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
204
Рисунок 1 – Геометрические параметры сопла
Исследования проводились при помощи термоанемометра постоянной температуры в
сечениях y. Шаг измерения 0,1 мм. Измерительные сечения выбраны с шагом 5 мм по оси x. В каждой точке измерения выполнялась регистрация массива значений скорости с частотой дискретизации 10 кГц, что обеспечивает выполнение условий теоремы Котельникова. Временная реализация измерений 10 с. Измерительные данные регистрировались при помощи модуля 16-разрядного АЦП NI PCIe 6323, являющегося стандартизированным продуктом National Instruments и лицензионного программного пакета LabView. Полученный массив данных обработан согласно ДСТУ ГОСТ 8.207:2008.
Результаты исследования профилей средней скорости изотермического воздушного потока стенда в характерных сечениях представлены на рисунке 2.
Рисунок 2 – Профили средней скорости изотермического воздушного потока стенда в характерных сечениях: на срезе конфузора (а); на расстоянии 5 мм от среза конфузора (б); на
расстоянии 20 мм (в); на расстоянии 30 мм (г).

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
205
Воздушный поток, формируемый стендом относится к затопленным струям, которые истекают в однородную неподвижную среду. Так как соотношение ширины и высоты конфузора больше чем 10:1, струю можно считать плоской.
Как следует из рисунка 2а на начальном участке струи формируется стратифицированный поток с прямоугольным профилем скорости. Однако в зоне смешения двух страт присутвтвует «провал» скорости, вызванный влиянием перегородки, разделяющей слои в конфузоре. Уже на расстоянии 5 мм от среза конфузора (рис. 2б) влияние перегородки не наблюдается, прямоугольный профиль скорости сохраняется до расстояния 20 мм от конфузора (рис. 2в). По мере отдаления от среза конфузора, абсолютные величины средней скорости уменьшаются, пространство между ядром и внешней границей струи занимают присоединенные массы, которые захватываются движущимся потоком из неподвижной окружающей среды и двигаются в том же направлении, составляя часть струи. Объем присоединенных масс увеличивается в направлении движения, поэтому ядро потока и граница раздела страт размываются с расстоянием, на границах струи образуется область заторможенного воздуха (рис. 2г). С отдалением от сопла влияние начальных условий быстро ослабевает и струя разрушается.
Наличие пульсаций мгновенной скорости потока приводит к росту составляющей погрешности исследуемых СИ, обусловленной нелинейностью градуировочной характеристики измерительных преобразователей.
На рисунке 3а представлен график зависимости уровня пульсаций скорости в рабочей части стенда от средней скорости потока при различных расстояниях l от среза конфузора. На рисунке 3б представлен график зависимости уровня пульсаций скорости от расстояния l от среза конфузора при различных средних скоростях потока. Как следует из рисунка, на начальном участке поток малотурбулентный, уровень пульсаций не превышает 2 % и незначительно зависит от скорости. С увеличением l до значения более 20 мм уровень пульсаций возрастает, т.к. стратификация разрушается, и поток становится турбулентным и непригодным для проведения исследований.
Рисунок 3 – Графики зависимости уровня пульсаций скорости v'/v в рабочей части стенда от средней скорости потока v при различных расстояниях l от среза конфузора (a) и
зависимости уровня пульсаций скорости v'/v в рабочей части стенда от расстояния l от среза конфузора при различных скоростях v потока (б)
На рисунке 4 представлен характерный вид профиля средней скорости и
соответствующий ему профиль пульсаций.
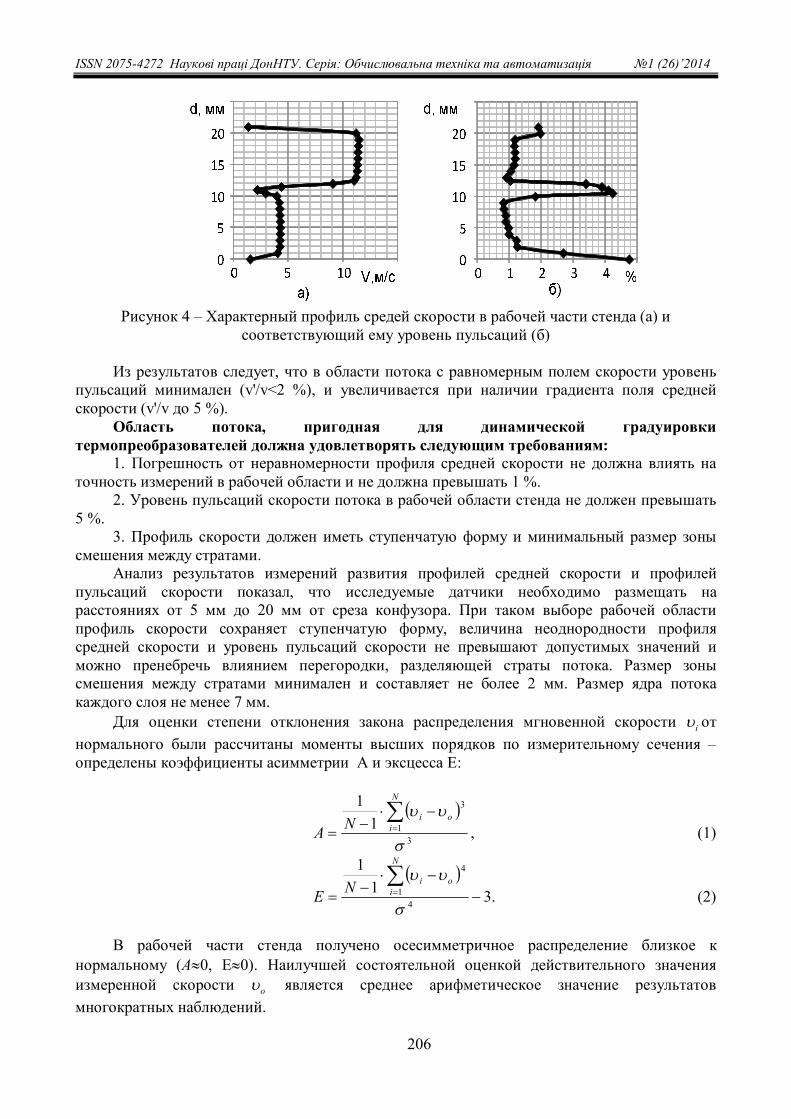
ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
206
Рисунок 4 – Характерный профиль средей скорости в рабочей части стенда (а) и
соответствующий ему уровень пульсаций (б) Из результатов следует, что в области потока с равномерным полем скорости уровень
пульсаций минимален (v'/v<2 %), и увеличивается при наличии градиента поля средней скорости (v'/v до 5 %).
Область потока, пригодная для динамической градуировки термопреобразователей должна удовлетворять следующим требованиям:
1. Погрешность от неравномерности профиля средней скорости не должна влиять на точность измерений в рабочей области и не должна превышать 1 %.
2. Уровень пульсаций скорости потока в рабочей области стенда не должен превышать 5 %.
3. Профиль скорости должен иметь ступенчатую форму и минимальный размер зоны смешения между стратами.
Анализ результатов измерений развития профилей средней скорости и профилей пульсаций скорости показал, что исследуемые датчики необходимо размещать на расстояниях от 5 мм до 20 мм от среза конфузора. При таком выборе рабочей области профиль скорости сохраняет ступенчатую форму, величина неоднородности профиля средней скорости и уровень пульсаций скорости не превышают допустимых значений и можно пренебречь влиянием перегородки, разделяющей страты потока. Размер зоны смешения между стратами минимален и составляет не более 2 мм. Размер ядра потока каждого слоя не менее 7 мм.
Для оценки степени отклонения закона распределения мгновенной скорости i от нормального были рассчитаны моменты высших порядков по измерительному сечения – определены коэффициенты асимметрии А и эксцесса Е:
3
1
3
11
N
ioiNА , (1)
.31
1
41
4
N
ioiNE (2)
В рабочей части стенда получено осесимметричное распределение близкое к
нормальному (А0, E0). Наилучшей состоятельной оценкой действительного значения измеренной скорости o является среднее арифметическое значение результатов многократных наблюдений.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
207
Для проведения экспериментальных исследований по определению динамических характеристик термопреобразователей предложена следующая методика. При помощи АТ создают стратифицированный двухслойный поток воздуха с заданными значениями скоростей V1 и V2 cоответственно. Исследуемый термопреобразователь помещают в рабочую часть ядра потока АТ и при помощи автоматического координатного устройства скачкообразно перемещают термопреобразователь из одной страты среды в другую (см. рис. 6). При этом регистрируют переходную функцию термопреобразователя.
1 – стратифицированный поток воздуха с заданными значениями скорости V для каждого слоя; 2 – исследуемый датчик.
Рисунок 6 – Схема определения динамических характеристик термопреобразователей Для того, чтобы переходная область между стратами не влияла на результат измерения,
время перемещения датчика из одного квазистационаронго состояния в другое не должно превышать 0,1 предполагаемой постоянной времени исследуемого датчика. При апробации предложенной методики для перемещения датчика использовалось координатное устройство, обеспечивающее время перемещения не более10 мс, что позволяет исследовать датчики, ожидаемая постоянная времени которых 0,1 с и более
Для практической проверки разработанной методики исследована зависимость постоянной времени термистрорного термоанемометра постоянной температуры от скорости окружающего потока. В качестве чувствительного элемента датчика исследуемого анемометра использован термистор фирмы "EPCOS" модель G540. Согласно технической документации на этот элемент, характеристикой тепловой инерции является постоянная времени τ. При скорости окружающего потока ν = 0 нормированное значение составляет 3 с. Зависимость τ(ν) не нормирована. При использовании датчика в большинстве технологических процессов ν ≠ 0. Поэтому фактическая постоянная времени отлична от паспортной и должна быть определена экспериментально для конкретных условий работы.
Значение разности между скоростями слоев потока устанавливалось равным 10% от средней скорости (значение изменения скорости, характерное для большинства технологических процессов). Постоянная времени τ определялась как момент времени, в который переходной процесс диссипирует в e раз (е – число Эйлера).
В результате исследований установлено, что в условиях вынужденного конвективного теплообмена, постоянная времени исследуемого первичного преобразователя на порядок меньше по сравнению с отсутствием вынужденной конвекции. То есть динамические характеристики термопреобразователей существенно зависят от условий теплообмена и должны определяться для конкретных условий их эксплуатации.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
208
Выводы 1. Разработан стенд для динамической градуировки СИ скорости и температуры,
реализующий физическую модель ступенчатого испытательного воздействия. 2. Проведенные исследования позволили установить пространственную область потока,
пригодную для выполнения динамической градуировки СИ с учетом допустимых неравномерности профиля средней скорости, уровня пульсаций скорости и моментов распределения высших порядков.
3. Выполнена экспериментальная апробация предложенной методики динамической градуировки с использованием исследуемого стенда. Обоснована возможность проведения динамической градуировки большинства проволочных, термисторных, пленочных термоанемометров, термопар, термометров сопротивления с постоянной времени 0.1 с и более.
Список использованной литературы 1. Державна система забезпечення єдності вимірювань. Нормовані метрологічні
характеристики засобів вимірювань: ДСТУ ГОСТ 8.009:2008. – Введ. 2008-10-01. – М.: Изд-во стандартов, 1985. – 38с.
2. Державна система забезпечення єдності вимірювань. Нормування і визначення динамічних характеристик аналогових засобів вимірювань. Основні положення: ДСТУ ГОСТ 8.256:2008. – Введ. 2008-10-01. – М. : Изд-во стандартов, 1985. – 9с.
3. Трубы аэродинамические малых дозвуковых скоростей. Методика метрологической аттестации: МИ 2000-89. – Введ. 1989-06-23. – М.: Изд-во стандартов,1989. – 19с.
4. Гордов А.Н. Основы температурных измерений / А.Н. Гордов О.М. Жагулло, А.Г. Иванова. – М.: Энергоатомиздат, 1992. – 304 с.
References
1. State Committee of Ukraine for Technical Regulation and Consumer Policy (2008), 8.009:2008. Derzhavna systema zabezpechennia yednosti vymiriuvan. Normovani metrolohichni kharakterystyky zasobiv vymiriuvan [8.009:2008 State system for ensuring the uniformity of measurements. Standardized metrological characteristics of measuring instruments], State Committee of Ukraine for Technical Regulation and Consumer Policy, Kiev, Ukraine.
2. State Committee of Ukraine for Technical Regulation and Consumer Policy (2008), 8.256:2008. Derzhavna systema zabezpechennia yednosti vymiriuvan. Normuvannia i vyznachennia dynamichnykh kharakterystyk analohovykh zasobiv vymiriuvan. Osnovni polozhennia. [8.256:2008 State system for ensuring the uniformity of measurements. Standardization and determination of dynamic characteristics of analogue measuring instruments. Basic principles], State Committee of Ukraine for Technical Regulation and Consumer Policy, Kiev, Ukraine.
3. USSR State Committee for management product quality and standards (1989), 2000-89. Truby ajerodinamicheskie malyh dozvukovyh skorostej. Metodika metrologicheskoj attestacii [2000-89 Pipes aerodynamic low subsonic speeds. Methodology metrological certification], USSR State Committee for management product quality and standards, Moscow, Russia.
4. Gordov, A.N., Zhagullo, O.M. and Ivanova, A.G. (1992), Osnovy temperaturnyh izmerenij [Fundamentals of Temperature Measurement], Jenergoatomizdat, Moscow, Russia.
Надійшла до редакції: Рецензент: 30.04.2014 д-р техн. наук, проф. Зорі А.А.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
209
Д.М. Кузнєцов, Д.А. Чупіс ДВНЗ «Донецький національний технічний університет» Дослідження фізичної моделі ступінчастого випробувального впливу для визначення динамічних характеристик термоперетворювачів. Виконано експериментальне дослідження повітряного потоку в робочій частині аеродинамічного стенда, що реалізує фізичну модель ступінчастого випробувального впливу для визначення динамічних характеристик термоперетворювачів. Визначено межі просторової області, придатної для динамічного градуювання датчиків, з урахуванням допустимих нерівномірності профілю середньої швидкості, рівня пульсацій швидкості і моментів розподілу вищих порядків. Запропоновано методику виконання динамічного градуювання. Ключові слова: термоперетворювач, динамічні характеристики, фізична модель, термоанемометр, градуювання, аеродинамічна труба.
D.N. Kuznetsov, D.A. Chupis Donetsk National Technical University Physical model of the stepwise testing action investigation for the thermoelements dynamic characteristics determination.– Air flow experimental investigation in the working section of the aerodynamic test bench which implements the test step excitation physical model for the thermoelements dynamic characteristics determination is carried out. The range of the spatial domain suitable for the sensors dynamic calibration subject to permissible average velocity profile irregularity, velocity pulsation level and higher orders probability moments is determined. Methodology of the dynamic calibration implementation is proposed. Keywords: thermoelement, dynamic characteristics, physical model, heat-loss anemometer, calibration, wind tunnel.
Кузнецов Дмитрий Николаевич, Украина, закончил Донецкий национальный технический университет, канд. техн. наук, доцент, доцент кафедры электронной техники ГВУЗ «Донецкий национальный технический университет» (ул. Артема, 58, г. Донецк, 83001, Украина). Основное направление научной деятельности – интеллектуальные микропроцессорные модули для измерения скоростей газовых потоков.
Чупис Дмитрий Анатольевич, Украина, закончил Донецкий национальный университет, аспирант кафедры электронной техники ГВУЗ «Донецкий национальный технический университет» (ул. Артема, 58, г. Донецк, 83001, Украина). Основное направление научной деятельности – повышение эффективности специализированных ИИС скорости и температуры потоков газов для исследования динамических характеристик термопреобразователей.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
© Куценко В.П., 2014 210
УДК 004:621.317.7
В.П. Куценко (д-р техн. наук, доц.) ДВНЗ «Донецький національний технічний університет», м. Донецьк
кафедра системного аналізу та моделювання Державне науково-виробниче підприємство „Кварсит”, м. Костянтинівка
e-mail: [email protected]
МАТЕМАТИЧНЕ МОДЕЛЮВАННЯ ВЛАСТИВОСТЕЙ ДІЕЛЕКТРИЧНИХ МАТЕРІАЛІВ ПРИ ВИКОРИСТАННІ МІКРОХВИЛЬОВИХ ЕКСПЕРТНИХ СИСТЕМ
Запропоновано математичне моделювання властивостей пористих діелектричних матеріалів при використанні мікрохвильових експертних систем у технологіях виробництва на прикладі еквівалентної схеми. Розраховано залежності спектральної щільності потужності шумів матеріалу від розмірів дефектів структури, від його температури при фіксованих розмірах дефекту, зміни хвильового опору від розмірів дефекту в його структурі. Проведені дослідження взаємозв’язку пористості матеріалу з спектральною щільністю потужності його власних радіотеплових випромінювань. Ключові слова: моделювання, неруйнівний мікрохвильовий контроль, спектральна щільність потужності, дефекти структури.
Вступ Радіометричні мікрохвильові методи і засоби застосовують в експертних системах для
контролю якості і геометричних розмірів виробів з діелектричних матеріалів. Відомо, що досліджувані матеріали і вироби впливають на проходження, відбиття, поглинання і розсіювання як власних, так і зовнішніх радіохвиль. По ступеню зміни їхніх параметрів можна судити про характерні властивості самого матеріалу, а також про відхилення їх від номіналу [1-5].
В останні десятиріччя активно розвиваються радіометричні системи і методи дослідження фізичних і біологічних об’єктів. Так роботи ведуться в Мерілендському університеті США, в Єрусалимському університеті Ізраїлю, Сеульському національному університеті Кореї і ряді інших наукових центрів розвинутих країн, в т.ч. Росії та України, результатом яких стало виникнення нового напряму радіометричного контролю, що базується на використанні принципів ближньопольової діагностики параметрів об’єктів, включаючи вимірювання електрофізичних параметрів матеріалів.
Постановка задачі дослідження Для подальшого розвитку мікрохвильових експертних систем діелектричних матеріалів
і виробів, актуальною є проблема створення загальної теорії НВЧ ближньопольової діагностики, яка включає розвиток та узагальнення математичних моделей мікрохвильових процесів у технологіях радіометричного контролю.
Основна частина Порушення структури і властивостей діелектричних матеріалів виробів майже завжди
супроводжується зміною їх фізико-механічних параметрів, а, отже, і результатів взаємодії електромагнітних хвиль із ними [1], [2], [6-8]. При мікрохвильовому контролі даних матеріалів важливе значення мають діелектрична постійна ε і тангенс кута діелектричних втрат tgδ.
Для подальшої оцінки можливості використання даних методів радіометричного контролю параметрів діелектричних матеріалів і виробів на їх основі було проведено

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
211
математичне моделювання процесів їх неруйнівного мікрохвильового контролю у технологіях виробництва на прикладі пористих діелектричних матеріалів.
З урахуванням того, що одними з основних дефектів структури продукції, що впливають на її міцність і радіотехнічні характеристики, є повітряні пузирі і відхилення від норми пористості матеріалу, моделювання було проведено на початку на прикладі наявності в структурі матеріалу дефекту у вигляді повітряного пузиря. Для чого була побудована модель структури виробу із зазначенням електромагнітних параметрів як самого матеріалу, так і дефектного включення, а також розмірів дефекту, відстаней його розташування відносно стінок виробу (рис. 1).
Рисунок 1 – Модель структури виробу при наявності повітряних пузирів
Розв’язання поставленої задачі проведено методом еквівалентних схем [9], який з погляду поширення енергії представлений як послідовно паралельне з’єднання RLC кіл, що відображають процес формування і проходження електромагнітної енергії (власної радіотеплової і зовнішньої зондувальної), яка несе інформацію про властивості виробів із пористих діелектричних матеріалів у зоні неруйнівного мікрохвильового контролю (рис. 2).
Математичне моделювання процесу радіотеплового контролю дефектів в виробах з пористого діелектричного матеріалу проведемо на прикладі повітряних пузирів і розшарувань (при цьому можна множину дрібних повітряних бульбашок у структурі матеріалу, розглядати також як одиничний пузир з їх інтегральним об’ємом) з використанням еквівалентної схеми рис. 2.
Рисунок 2 – Еквівалентна схема для моделювання процесу контролю дефектів структури пористих діелектричних матеріалів і виробів на їх основі у технологіях виробництва
радіотепловим методом
На рис. 2 позначено R, L і C відповідно активні втрати, індуктивні і ємнісні властивості середовища, індекси позначають належність: 1 – до діелектричних матеріалів із властивостями, що відповідають нормі, 0 – до повітряних пузирів і розшарувань, В – до навколишнього середовища, А – до приймальної антени, Z0, ZC – характеристичний хвильовій опір відповідно навколишнього середовища і діелектричного матеріалу.
Для математичного моделювання процесу радіотеплового контролю дефектів структури на прикладі повітряних пузирів в виробах з пористих діелектричних матеріалів зазначимо, що товщина виробу d складається з ділянок d1, d2 і d3, де d1 і d3 – ділянки товщини

212
виробу в зоні контролю з властивостями матеріалу, що відповідає нормі, а d2 – товщина дефектної ділянки. Параметри зовнішнього середовища дорівнюють параметрам повітряних пузирів і розшарувань: RВ=Z0, LВ=L0 і CВ= C0.
Моделювання проведено у відповідності з теорією визначення параметрів неоднорідностей методом еквівалентних схем при впливі випадкових НВЧ-сигналів на лінійні стаціонарні коло, згідно з якою ці коло (матеріал з дефектом) зручно характеризувати речовим коефіцієнтом передачі, що визначається хвильовим опором матеріалу. Тому, враховуючи послідовно паралельне з’єднання RLC-кіл представленої еквівалентної схеми, що була на початку складена функція для характеристичного хвильового опору ZC пористого діелектричного матеріалу виробу в зоні контролю (1), як функція від електричних параметрів схеми, розмірів дефекту (пузиря) і відстаней його розташування в структурі виробу, а також частоти радіометричного контролю, яка набуде вигляду:
,
111
11
11
11),,,,,,,,,(
31
3131
02
02
11
1111
000
321101010
dCjdLjdR
CdjLdj
CdjLdjRd
CjLjZ
dddCCLLRZZС
де Z0, R1, L0, L1, C0, C1, d2 і d1, d3, – відповідно активні хвильові опори, індуктивності і ємності, товщина виробу в зоні контролю дефектної ділянки і товщини, де властивості матеріалу відповідають нормі; ω – частота, на якій здійснюється радіометричний неруйнівний контроль.
Зв’язок між електричними параметрами пористих діелектричних матеріалів виробу в зоні контролю із параметрами еквівалентної схеми, описується виразами, отриманими з типових формул [8-10]:
tgCR
11
1 ,
01
1C
L , 00
01 L
CZ
, 01 CC ,
0
0ZL ,
00
1Z
C
. (2)
Окрім того позначимо відстані d1 і d3 до повітряного пузиря через товщину матеріалу d і розмір пузиря d2 як функцію координати Х (див. рис. 1):
Xddd )( 21 , )1)(( 23 Xddd . (3) Замінимо у формулі (1) параметри еквівалентної схеми електричними параметрами
матеріалів виробу в зоні контролю (2), після перетворення одержимо вираз характеристичного хвильового опору ZC матеріалу виробу:
,
11
11
11
1),,,,,,(3
03
03
0
0
2
02
01
01
01
0
20
dZ
jd
Zjdtg
Z
Zdj
Zjd
Zdj
ZjdtgZdZ
XddtgZZ С
Далі находимо реальну частину функції характеристичного хвильового опору ZC матеріалу виробу
),,,,,,(Re),,,,,,( 2020 XddtgZZXddtgZZ CCP , (5) яка буде використана для розрахунку функції спектральної щільності потужності (дисперсії) власних електромагнітних шумів матеріалу виробу за формулою Найквіста:
),,,,,,(4),,,,,,,( 20202 XddtgZkTZTXddtgZU CPCP . (6)

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
213
Залежність спектральної щільності потужності шумів пористого діелектричного матеріалу з врахуванням повітряного пузиря в його структурі (рис. 3) буде розрахована з використанням програми Mathcad 15 як різниця між функціями, побудованими на основі (6), в одному випадку з параметрами матеріалу виробу, що відповідає нормі, і в другому випадку при наявності в структурі повітряного пузиря:
)],,,,,,,(),,,0,,,,([),,,,,,,( 202
02
202 TXddtgZUTXdtgZUTXddtgZU CPCPCP , (7)
де Т – температура матеріалу виробу, що прийнята для розрахунків 310К, ε=3,37, tgδ=0,001, ω=50 ГГц.
а) б)
Рисунок 3 – Залежність спектральної щільності потужності шумів пористого діелектричного матеріалу з врахуванням розмірів повітряного пузиря в його структурі
Моделювання дозволило встановити, що рівень спектральної щільності потужності
шумів від матеріалу виробу зменшується при збільшенні розмірів повітряного пузиря, а порівнювана за формулою (7) різниця дисперсій, що відповідає методу радіометричного контролю з періодичним порівнянням сигналів, збільшується і складає близько 10-19Вт/Гц (графік рис. 3 а), при цьому дисперсія зовсім не залежить від місця розташування пузиря (вісь Х) в матеріалі виробу (рис. 3 б).
Крім того, комп’ютерне моделювання дало можливість розрахувати вплив зміни температури матеріалу виробу на достовірність контролю. Дослідження проводилося для оцінки впливу зміни температури матеріалу виробу в діапазоні 300.....340К на рівень спектральної щільності потужності шумів від повітряного пузиря розміром d2=2мм (рис. 4).
Рисунок 4 – Залежність спектральної щільності потужності шумів пористого діелектричного
матеріалу від його температури при розмірах повітряного пузиря 2 мм
Розрахунки показують, що зміна температури виробу на 40К призводить до зміни спектральної щільності потужності електромагнітного шуму на 0,1·10-19Вт/Гц і може дати відносну похибку вимірювань порядку 16%, а при зміні температури на 4-5К – порядку 1,5%. Тобто з урахуванням наявних допусків для отримання достовірного контролю розмірів пузиря достатньо забезпечити термостабилизацию у зазначених межах.

214
Також була розрахована залежність зміни реальних частин хвильових опорів матеріалу від розмірів повітряного пузиря в структурі, при нормі і з пузирьом (рис. 5), яка характеризує втрати енергії сигналу при проходженні через матеріал з дефектом.
Рисунок 5 – Залежність змін хвильового опору пористого діелектричного матеріалу від
розмірів повітряного пузиря в його структурі
Проведене моделювання показує, що для впевненої і достовірної реєстрації повітряних пузирів і розшарувань необхідна радіометрична апаратура з флуктуаційним порогом чутливості не менше 10-20-10-22Вт/Гц.
Враховуючи, що спектральна щільність потужності сигналу, випромінюваного матеріалом вироби не залежить від місця розташування в ньому дефекту у вигляді повітряного пузиря, була запропонована гіпотеза, яка полягає в тому що пористість матеріалу (рис. 6) (як найважливіший параметр виробу, значення якого і стабільність якого потрібно контролювати по всьому об’єму виробу), можна уявити як множину дрібних повітряних бульбашок в структурі матеріалу і розглядати її як одиничний пузир з їх інтегральним об’ємом.
Рисунок 6 – Модель структури виробу при порушенні пористості матеріалу
Для перевірки цієї гіпотези були виготовлені 5-ть зразків одного хімічного складу і
однакового розміру, з однаковою чистотою обробки поверхні, але з різною пористістю, яка була проконтрольована існуючим в технології методом, що полягає в тому, що зразки зважували на аналітичних вагах, потім після вакуумного відсмоктування з них повітря поміщалися в дистильовану воду при кімнатній температурі. Після добового просочення їх знову зважували і за різницею ваги за відповідними таблицями визначали пористість. Дані отримані існуючим методом технологічного контролю наведені в таблиці 1 в 2 і 3 стовпцях. Після цього зразки були висушені у сушильному шафі і піддані радіотепловому контролю.
Таблиця 1
Результати досліджень пористості і спектральної щільності потужності радіотеплових випромінювань діелектричного матеріалу лабораторним і радіотепловим методами
№ зразка Водопоглинення, % Пористість, % 2CPU ·10-21Вт/Гц
1 0,035 0,09 1,68 2 0,033 0,08 1,73 3 0,022 0,06 1,89 4 0,02 0,05 1,91 5 0,018 0,04 1,98

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
215
Вимірювання спектральної щільності потужності радіотеплових шумів проводилися по широкій стінці зразків для кожного з них по 10 разів при температурі нагріву в термостаті до 38оС (310К). Час вимірювання одного зразка складав 20-30 сек. Отримані результати статистично оброблені і зведені в таблицю 1 (останній стовпець) і рис. 7.
Рисунок 7 – Залежність спектральної щільності потужності власних радіотеплових
випромінювань діелектричного матеріалу від його пористості
Проведені дослідження взаємозв’язку пористості діелектричного матеріалу з спектральною щільністю потужності його власних радіотеплових випромінювань на 5 експериментальних зразках показали пряму кореляцію результатів.
Встановлено, що чим менше пористість матеріалу, тим більше спектральна щільність потужності власних радіотеплових шумів матеріалу (таблиця 1, рис. 7). При цьому точність вимірювань параметрів пористості радіотепловим методом забезпечила навіть завищені вимоги, закладені в зразках.
Висновки 1. Знайшли подальший розвиток наукові основи мікрохвильового радіометричного
неруйнівного контролю властивостей діелектричних матеріалів і виробів за рахунок вимірювання параметрів низькоінтенсивних шумових НВЧ-сигналів методами періодичного порівняння, потужність яких зіставлювана і навіть нижче рівня паразитних шумів вхідних елементів радіометричних приладів.
2. Встановлено, що параметри дефектів структури матеріалів корелюють з потужністю спектральної щільності власного радіотеплового випромінювання матеріалу.
3. Показано, що достовірність методів мікрохвильового радіометричного неруйнівного контролю властивостей діелектричних матеріалів і виробів підтверджується адекватністю розроблених математичних моделей процесів контролю з результатами практичних досліджень.
Список використаної літератури 1. Головко Д.Б. Методи і засоби частотно-дисперсійного аналізу речовин та матеріалів: Фізичні
основи / Д.Б. Головко, Ю.О. Скрипник. – К.: ФАДА, ЛТД, 2000. – 200 с. 2. Головко Д.Б. Надвисокочастотні методи та засоби вимірювання фізичних величин / Головко
Д.Б., Скрипник Ю.О., Яненко О.П. – К.: Либідь, 2003. – 328 с. 3. Куценко В.П. Радіометричний неруйнівний контроль діелектричних виробів / В.П. Куценко,
О.П. Яненко // Вісник Національного технічного університету України „КПІ”. – Серія „Радіотехніка. Радіоапаратобудування”. – 2010. – Вип. 41/2010. – С.124–129.
4. Лебедев И.В. Техника и приборы СВЧ: [учебн. для студентов ВУЗов], Т. 1. / Под ред. академика Девяткова Н.Д. – М.: Высш. школа, 1970. – 440 с.
5. Мищенко С.В. Проектирование радиоволновых (СВЧ) приборов неразрушающего контроля материалов / С.В. Мищенко, Н.А. Малков. – Тамбов: Тамб. гос. техн. ун-та, 2003. – 127 с.

216
6. Головко Д.Б. Методи і засоби частотно-дисперсійного аналізу матеріалів та речовин / Д.Б. Головко. – Київ: Либідь, 1999. – 214 с.
7. Куценко В.П. Методы и средства сверхвысокочастотной радиометрии / [В.П. Куценко, Ю.А. Скрипник, Н.Ф. Трегубов, К.Л. Шевченко, А.Ф. Яненко]. – Донецьк: ІПШІ «Наука і освіта», 2011. – 324 с.
8. Куценко В.П. Радіометричний НВЧ-контроль властивостей матеріалів / [В.П. Куценко, Ю.О. Скрипник, М.Ф. Трегубов, К.Л. Шевченко, О.П. Яненко]. – Донецьк : ІПШІ «Наука і освіта», 2012. – 348 с.
9. Левин Б.Р. Теоретические основы статистической радиотехники / Б.Р. Левин. – [3-е изд., перераб. и доп.]. – М.: Радио и связь, 1989. – 656 с.
References 1. Golovko, D.B. and Skripnik, Yr.А. (2000), Mеtоdy і zаsоby chаstоtnо-dispеrsіynоgо аnаlіzу rеchоvin
tа mаtеrіаlіv: Fizichnі оsnоvy [Methods and facilities of frequency-dispersible analysis of substances and materials : Physical bases], FАDА LТD, Kyiv, Ukraine.
2. Golovko, D.B., Skripnik, Yr.А. and Yanenkо, А.F. (2003), Nаdvиsоkоchаstоtnі mеtоdy tа zаsоby vymіrjvаnnj fіzychnych vеlychin [Super-high-frequency methods and facilities of measuring of physical sizes], Lybid, Kyiv, Ukraine.
3. Кutsenkо, W.P. and Yanenkо, А.F., (2010) “Aerophare non-destructive control of dielectric wares” Rаdіоmеtrychniy nеrуjnіvnij kontrol dіеlеktrychnych vyrоbіv, Announcer of the National technical university of Ukraine “КPІ”. are Series of “Radiotrician. Apparatus Radiobuilding”, vol. 41, pp. 124-129.
4. Lebedev I.V., (1970), Теchnika i pribоry SVCh [Technique and devices OHF], vol. 1, in Devytkov, N.D. (ed), [textbook for the students of Institutions of higher learning], Higher school, Moscow, USSR.
5. Michenko S.V. and Маlkov, N.A., (2003), Prоеktirоvаnie rаdiоvоlnоvych (SVCh) pribоrоv nеrаzryschаjschеgо kоntrоlj mаtеriаlоv [Planning of radio wave (OHF) devices of¬not destroying control of materials], House of the Tambov state technical university, Tambov, Russia.
6. Golovko D.B., (1999), Mеtоdy і zаsоby chаstоtnо-dispеrsіynоgо аnаlіzу mаtеrіаlіv tа rеchоvin [Methods and facilities of frequency-dispersible analysis of materials and substances], Kyiv, Ukraine.
7. Кutsenkо, W.P., Skripnik, Yr.А., Тrеgubоv, N.F., Shevchenko, К.L. and Yanenkо, А.F. (2011), Metodu i sredstva sverchvusokochastotnoi radiometrii [Methods and facilities of super-high-frequency radiometry], IPAI «Science and education», Donetsk, Ukraine.
8. Кutsenkо, W.P., Skripnik, Yr.А., Тrеgubоv, N.F., Shevchenko, К.L. and Yanenkо, А.F. (2012), Radiometrichnij SVCh-kontrol vlastuvostei materialiv [Aerophare OHF-control of properties of materials], IPAI «Science and education», Donetsk, Ukraine.
9. Levin, B.R., (1989), Теоrеtychеskiе оsnоvy stаtistichеskоy rаdiоtеchniky Theoretical bases of the statistical radioengineering, 3nd. ed, Radio and connection, Moscow, USSR.
Надійшла до редакції: Рецензент: 08.05.2014 д-р техн. наук, проф. Зорі А.А.
В.П. Куценко ДВНЗ «Донецкий национальный технический университет» Математическое моделирование свойств диэлектрических материалов при использовании микроволновых экспертных систем. Предложено математическое моделирование свойств пористых диэлектрических материалов при использовании микроволновых экспертных систем в технологиях производства на примере эквивалентной схемы. Рассчитаны зависимости спектральной плотности мощности шумов материала от размеров дефектов структуры, от его

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
217
температуры при фиксированных размерах дефекта, изменения волнового сопротивления от размеров дефекта в его структуре. Проведенные исследования взаимосвязи пористости материала со спектральной плотностью мощности его собственных радиотепловых излучений.. Ключевые слова: моделирование, неразрушающий микроволновой контроль, спектральная плотность мощности, дефекты структуры.
V.P. Kutsenko Donetsk National Technical University Mathematical design of the properties of dielectric materials when using microwave consulting models. The paper offers a mathematical design of the processes of non-destructive microwave control of porous dielectric materials in production technologies on the example of equivalent chart under the influence of casual signals on linear stationary chains. We calculated the dependences of spectral density of the noise power of the material on the sizes of its structure defects, on its temperature and on the changes of impedance. We studied the interconnection between the porosity of the material and spectral density of the power of its radioactive emissions. Keywords: design, non-destructive microwave control, spectral closeness of power, defects of structure.
Куценко Владимир Петрович, Украина, закончил Таганрогский радиотехнический институт, Заслуженный работник промышленности Украины, докт. техн. наук, с.н.с., доцент кафедры системного анализа и моделирования ГВУЗ «Донецкий национальный технический университет» (ул. Артема, 58, г. Донецк, 83001, Украина), с.н.с.-консультант Государственного научно-производственного предприятия «Кварсит» (ул. Шмидта, 20, г. Константиновка, Донецкой обл., 85104, Украина). Основное направление научной деятельности – измерение низкоинтенсивных СВЧ-сигналов, радиометрические исследования состава и свойств объектов, метрология измерения случайных сигналов.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
© Лыков А.Г., Косарев Н.П., 2014 218
УДК 629.3.054.254
А.Г. Лыков, Н.П. Косарев (канд. техн. наук, доц.) ГВУЗ «Донецкий национальный технический университет», г. Донецк
кафедра электронной техники e-mail: [email protected]
ИССЛЕДОВАНИЕ ВЛИЯНИЯ ШИРИНЫ СПЕКТРА ИЗЛУЧЕНИЯ ИСТОЧНИКА НА ЧУВСТВИТЕЛЬНОСТЬ ИЗМЕРИТЕЛЬНЫХ КАНАЛОВ ГАЗОАНАЛИЗАТОРОВ
ВЫХЛОПНЫХ ГАЗОВ АВТОМОБИЛЬНОГО ТРАНСПОРТА
В качестве источников излучения выбраны светоизлучающие диоды, спектры излучения которых соответствуют спектру поглощения СО, но имеют отличия в ширине спектра в (4÷5) раз. Установлено, что сужение спектра излучения приводит к повышению чувствительности оптической части измерительного канала, однако степень сужения спектра влияет на линейность изменения информационного параметра от изменения концентрации; наилучший результат наблюдается при совпадении спектра поглощения газовой составляющей и спектра излучения светоизлучающего диода. Предложены пути повышения оптической мощности источников излучения для увеличения соотношения сигнал-шум при сохранении достигнутого эффекта увеличения чувствительности, основанные на модернизации оптической части измерительных каналов. Ключевые слова: измерительный канал, светоизлучающий диод, спектр излучения, ширина спектра, чувствительность, шум, оптическая мощность.
Актуальность и проблема Для контроля экологических показателей автомобильного транспорта, в частности
состава выхлопных газов, в Украине созданы стандарты ДСТУ 4277 и ДСТУ 4276 [1]. Стандарт ДСТУ 4277 распространяется на автомобили с двигателями, работающими на бензине или газовом топливе, и устанавливает нормы и методы измерений содержания оксида углерода (СО) и углеводородов (СН) в отработавших газах автомобилей (см. табл. 1).
Таблица 1
Гранично-допустимое содержание СО и СН в отработанных газах автомобилей Наименование газовой составляющей
Содержание по объему Автомобили без нейтрализаторов
Автомобили с однокомпонентными нейтрализаторами
Автомобили с трехкомпонентными нейтрализаторами
Оксид углерода (СО) 3,5 об.% 1,0 об.% 0,5 об.% Углеводороды (СН) 1200 млн-1 600 млн-1 100 млн-1
Для газоанализаторов оксида углерода основная абсолютная погрешность не должна
превышать ±0,05 об.% для диапазона от 0 до 1 об.% и ±0,2 об.% для диапазона от 0 до 5 об.%. Для газоанализаторов углеводородов основная абсолютная погрешность не должна превышать ±50 млн-1 для диапазона от 0 до 1000 млн-1 и ±150 млн-1 для диапазона от 0 до 3000 млн-1 [1].
Исходя из проведенного анализа газоанализаторов выхлопных газов автомобильного транспорта [2] следует, что устройства обеспечивают требуемую точность измерений в диапазоне измерений от 0 до 5 об.% для СО и от 0 до 3000 ppm для СН. При контроле в меньшем диапазоне – от 0 до 1 об.% для СО и от 0 до 1000 ppm для СН, газоанализаторы не

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
219
обеспечивают требуемой точности. Представленные положения обуславливают необходимость повышения точности измерений составляющих выхлопных газов, в частности, СО и СН и доведения абсолютной погрешности до значений не более ±0,05 об.% и ±50 млн-1, соответственно.
Постановка задач исследований Для повышения чувствительности измерительных каналов газоанализаторов
выхлопных газов автомобильного транспорта необходимо решить следующие задачи: – проанализировать влияние ширины спектра излучения источника на
чувствительность измерительных каналов; – усовершенствовать оптическую часть измерительных каналов контроля
концентраций составляющих выхлопных газов. Решение задач и результаты исследований Основной причиной выхода погрешности существующих газоанализаторов за
установленные пределы является недостаточная чувствительность измерительных каналов, а также влияние шумов и помех на результаты измерений при уменьшении диапазона измерений СО и СН, так как при этом уменьшается соотношение сигнал-шум.
Для анализа возможности увеличения чувствительности произведем исследование влияния ширины спектральной характеристики мощности источника излучения (спектра излучения), в качестве которого используется светоизлучающий диод (СИД), на чувствительность измерительных каналов контроля концентраций составляющих выхлопных газов. Данный анализ произведем на основе современных инфракрасных светоизлучающих диодов СИД LED46-TEC-PRW (принят за базовый) и LED-465-NS [3,4], спектры излучения которых соответствуют спектру поглощения СО (см. рис. 1).
Рисунок 1 – Спектральные характеристики мощности излучения СИД LED46-TEC-PRW (1 –
при t = 2ºC; 2 – при t = 28ºC; 3 – при t = 52ºC) (а) и LED- 465-NS (t = 24ºC) (б)
Основные электрические и оптоэлектрические параметры выбранных СИД представлены в таблице 2 [3,4]. Исходя из представленных характеристик и параметров следует, что спектральная характеристика для СИД LED-465-NS в (4÷5) раз уже спектральной характеристики для СИД LED46-TEC-PRW. Для аналитического описания спектра излучения СИД используем выражение вида [5,6]:
,2lnexp2lnexp)( 202
00
020
20
ФbSS uСИД (1)
где S0 – спектральная плотность мощности излучения; Ф0 – оптическая мощность излучения; λ0 – центральная длина волны спектральной характеристики; bu – коэффициент, зависящий от полуширины спектральной характеристики Δλ0.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
220
Таблица 2 Электрические и оптоэлектрические параметры LED46-TEC-PRW и LED-465-NS
Наименование параметра
Тип инфракрасного СИД
СИД LED46-TEC-PRW
СИД LED- 465-NS
Прямой ток, мА 200 200 Импульсный прямой ток, мА 2000 2000 Длина волны в максимуме спектра, мкм 4,6 4,65 Полуширина спектра, мкм 900 200 Оптическая мощность , мкВт 6 1.5 Прямое напряжение , В 0,5 0,3
Поскольку представленная математическая модель не учитывает наличие двух пиков в
реальной спектральной характеристике СИД, используем уточненное выражение для аналитического описания спектра излучения СИД:
2022
022
2012
011
0
опт
202
222
201
2110
2lnexp2lnexp2ln
expexp)(
uu
uu
uuuuСИД
KKP
bKbKSS
, (2)
где λu01 и λu02 – центральные длины волн пиков спектральной характеристики; Δλu01 и Δλu02 – полуширины спектральной характеристики относительно каждого из пиков; K1 и K2 – коэффициенты коррекции амплитуд пиков.
Оптический сигнал на выходе кюветы с анализируемыми выхлопными газами представляется выражением вида [5,7]:
,exp,,,, обСИДобКСИДобвыхК СlSlСКSlСS (3) где KК(λ, Cоб, l) – коэффициент пропускания кюветы с анализируемым газом; ελ – коэффициент, зависящий от длины волны излучения и представляющий собой математическая модель спектра поглощения исследуемого газа; l – длина кюветы; Cоб – концентрация исследуемого газа.
Выходной сигнал приемника излучения, в качестве которого используется фотодиод, пропорционален интегральной оценке выходного сигнала кюветы с анализируемым газом (входного сигнала фотодиода) [5,8]:
.,,,,2
1
dlСSlСФ обвыхКобвхФД (4)
В качестве информационного параметра оптической части измерительных каналов выступает изменение мощности (интенсивности) оптического излучения после прохождения через кювету с исследуемыми выхлопными газами:
.
, %0,
,,)(
2
1
2
1
об.
dlСS
dlСS
ФСФ
С
обвыхК
обвыхК
СИД
обвхФДоб (5)
Используя разработанную в работе [9] математическую модель спектра поглощения оксида углерода (СО), математические модели спектральных характеристик СИД LED46-TEC-PRW и LED- 465-NS (2) и выбрав длину измерительной кюветы l = 7 см, расчетным путем были получены зависимости информационного параметра (5) оптической части

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
221
измерительного канала от концентрации СО в диапазоне от 0 до 1 об.% (см. рис. 2).
обС
Рисунок 2 – Зависимости информационного параметра оптической части измерительного
канала от концентрации СО для СИД LED46-TEC-PRW (1) и LED- 465-NS (2)
Из полученных зависимостей (см. рис.2) определяются чувствительности оптической части измерительного канала концентрации оксида углерода:
– при использовании СИД LED46-TEC-PRW чувствительность остается практически постоянной во всем измерительном диапазоне и составляет:
;
%1015.0
011985.0
.46 обоб
обLED С
СK
– при использовании СИД LED- 465-NS в диапазоне концентраций СО от 0 до 0,5 об.% чувствительность стремится к чувствительности СИД LED46-TEC-PRW;
– при использовании СИД LED- 465-NS при диапазоне концентраций СО от 0,5 до 1 об.%:
.
%1051.0
5.019681.09426.0
.LED465NS обоб
обССK
Исходя из полученных значений можно сделать вывод, что чувствительность оптической части измерительного канала за счет использования СИД с зауженным спектром в диапазоне концентраций СО от 0,5 до 1 об.% повышается в:
.4.3)015.0/(051.0/ LED46LED465NS разаKKn Однако зависимость информационного параметра от концентрации СО при
использовании СИД LED-465-NS получается существенно нелинейной за счет скачкообразного изменения информационного параметра при концентрациях (0,4÷0,5) об.%. Скачок обусловлен наложением длинноволновой ветви спектра поглощения оксида углерода [9] на крутую область спектральной характеристики СИД и, как следствие, отсутствие влияния длинноволновой ветви спектра поглощения CО при низких концентрациях (менее 0.5 об.%).
Таким образом, при измерительном диапазоне концентраций СО от 0 до 5 об.% (в соответствии с ДСТУ 4277) использование СИД LED-465-NS является предпочтительным за счет увеличения чувствительности оптической части измерительного канала более чем в три раза. При измерительном диапазоне концентраций СО от 0 до 1 об.% (в соответствии с ДСТУ 4277), что соответствует содержанию СО в выхлопе современных автомобилей (см. табл. 1), чувствительность практически не изменяется.
Для получения линейной зависимости информационного параметра от концентрации СО необходимо расширить спектральную характеристику СИД в сторону длинноволновой ветви спектра поглощения оксида углерода. Это достигается за счет использования СИД LED46-TEC-PRW с оптическим фильтром, выделяющим излучение в диапазоне длин волн

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
222
(4,4÷4,9) мкм [10]. Зависимости информационного параметра оптической части измерительного канала от концентрации СО для СИД LED46-TEC-PRW без и с оптическим фильтром представлены на рисунке 3.
0 0.2 0.4 0.6 0.80.8
0.85
0.9
0.95
12
Соб, об.%
обС
Рисунок 3 – Зависимости информационного параметра оптической части измерительного
канала от концентрации СО для СИД LED46-TEC-PRW без (1) и с оптическим фильтром (2)
Чувствительность оптической части измерительного канала концентрации СО при использовании СИД LED46-TEC-PRW с оптическим фильтром составляет:
.
%1031.0
0119694.0
._46 обоб
обОФLED С
СK
Таким образом, чувствительность оптической части измерительного канала повышается примерно в 2 раза и зависимость информационного параметра от концентрации СО носит линейный характер во всем измерительном диапазоне.
На основании проведенных исследований можно сделать вывод, что для увеличения чувствительности измерительного канала и получения практически линейного изменения информационного параметра необходимо сужение спектра излучения СИД, а также совпадение спектра поглощения оксида углерода и спектра излучения СИД. Это можно добиться либо подбором светоизлучающих диодов, либо применением оптических фильтров инфракрасного диапазона.
Недостатком рассмотренного способа повышения чувствительности является снижение уровня оптической мощности СИД и, как следствие, понижение уровня сигнала на выходе фотодиода, что приводит к уменьшению соотношение сигнал-шум. Если принять уровень сигнала на выходе фотодиода при использовании СИД LED46-TEC-PRW за единицу при концентрации СО Соб = 0 об.%, то уровень сигнала на выходе фотодиода при использовании СИД LED- 465-NS составляет 0,13, а при использовании СИД LED46-TEC-PRW с оптическим фильтром – 0,39. Фактически уменьшение уровня сигнала нивелирует достигнутое повышение информационной составляющей о концентрации СО за счет увеличения влияния шумов и помех в выходном сигнале.
Для увеличения соотношения сигнал-шум необходимо либо уменьшать уровень шумов (в основном обусловлен шумами СИД и фотодиода), который является некоррелированной функцией, что существенно затрудняет его учет и коррекцию, либо повышать оптическую мощность источника излучения.
Путями повышения оптической мощности источника излучения являются: 1. Применение широкополосного источника излучения, обладающего оптической
мощностью в сотни–тысячи раз превышающей оптическую мощность узкополосных источников, в группу которых попадают рассмотренные выше СИД инфракрасного диапазона. Для повышения чувствительности оптической части измерительных каналов и уменьшения погрешности от влияния соседних по спектру поглощения составляющих

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
223
выхлопных газов, со стороны фотодиода предлагается поставить оптический фильтр инфракрасного диапазона (рекомендуемый диапазон длин волн, пропускаемых фильтром – от 4,4 мкм до 4,9 мкм). При этом мощность оптического сигнала на входе фотодиода уменьшается, однако по сравнению с узкополосными светоизлучающими диодами положительный эффект составит порядка десятков раз.
2. Применение в качестве источника излучения так называемой “пушки” светодиодов, представляющей собой N-ое количество СИД инфракрасного диапазона с зауженным спектром излучения, сгруппированных в одном месте. Мощность излучения от “пушки” светодиодов по методу суперпозиции представляет собой сумму мощностей от действия каждого СИД в отдельности. Для сведения потока излучения от “пушки” светодиодов в активную область фотодиода с его стороны ставится оптическая линза. Таким образом, количество используемых в составе “пушки” СИД будет определять мощность оптического сигнала на входе фотодиода, себестоимость оптической части измерительного канала и его массо-габаритные показатели.
Предложенные пути повышения оптической мощности источников излучения требуют более тщательной проработки и являются основой для дальнейших исследований.
Выводы 1. Исследовано влияние ширины спектра излучения источника на чувствительность
измерительных каналов. В качестве источников излучения предложено использовать светоизлучающие диоды LED46-TEC-PRW (принят за базовый) и LED-465-NS, спектры излучения которых соответствует спектру поглощения СО. Установлено, что сужение спектральной характеристики СИД приводит к повышению чувствительности оптической части измерительных каналов (для СИД LED-465-NS повышение достигает 3,4 раза в диапазоне концентраций СО от 0,5 до 1 об.%, а в диапазоне от 0 до 0,5 об.% чувствительность не увеличивается).
Использование СИД LED46-TEC-PRW с оптическим фильтром с диапазоном пропускания длин волн (4,4÷4,9) мкм обеспечивает повышение чувствительности в 2 раза, при этом зависимость информационного параметра от концентрации СО носит линейный характер в диапазоне концентраций от 0 до 1 об.%.
2. Установлено, что повышение чувствительности оптической части измерительного канала за счет сужения спектра излучения СИД сопровождается снижением уровня его оптической мощности и, как следствие, увеличение влияния шумов в выходном сигнале.
3. Предложены пути повышения оптической мощности источников излучения, заключающиеся в использовании либо широкополосного источника и оптического фильтра со стороны фотодиода, либо “пушки” светодиодов инфракрасного диапазона и фокусирующей оптической линзы со стороны фотодиода.
Список использованной литературы 1. Норми і методи вимірювань вмісту оксиду вуглецю та вуглеводнів у відпрацьованих
газах автомобілів з двигунами, що працюють на бензині або газовому паливі: ДСТУ 4277:2004. – К.: Держспоживстандарт України, 2004. – 12 с.
2. Лыков А.Г. Анализ газоанализаторов выхлопных газов автомобильного транспорта и пути повышения их точности / А.Г. Лыков, А.В. Вовна // Наукові праці Донецького національного технічного університету. Серія “Обчислювальна техніка та автоматизація”. – 2013. – Випуск 2(25)’2013. – С. 246 – 253.
3. IBSG. Mid infrared optoelectronics: Светодиоды 2.7 - 4.7 мкм [Электронный ресурс]. – Режим доступа: http://www.ibsg.ru/led/led_2.html. – Дата доступа: февраль 2014. – Загл. с экрана.
4. IBSG. Mid infrared optoelectronics: Светодиоды с узким спектром 2.7 - 4.7 мкм. [Электронный ресурс]. – Режим доступа: http://www.ibsg.ru/led/led3.html. – Дата доступа:

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
224
февраль 2014. – Загл. с экрана. 5. Методы и средства аналитического измерения концентрации газовых компонент и пыли
в рудничной атмосфере угольных шахт / А.В. Вовна, А.А. Зори, В.Д. Коренев, М.Г. Хламов. – Донецк: ГВУЗ “ДонНТУ”, 2012. – 260 с.
6. Смит А. Прикладная ИК-спектроскопия: пер. с англ. / А.Смит. – М.: Мир, 1982. – 328 с. 7. Бреслер П.И. Оптические абсорбционные газоанализаторы и их применение /
П.И. Бреслер. – Л.: Энергия, 1980. – 164 с. 8. Якушенков Ю.Г. Теория и расчет оптико-электронных приборов: учебник для студентов
вузов / Ю.Г. Якушенков. – [4-е изд, перераб и доп.]. – М.: Логос, 1999. – 480 с. 9. Вовна А.В. Математическая модель оптического тракта измерителя концентрации
угарного газа / А.В. Вовна, А.А. Зори, А.Г. Лыков, М.Г. Хламов // Наукові праці Донецького національного технічного університету. Серія “Обчислювальна техніка та автоматизація”. – 2010. – Випуск 18(169). – С. 34 – 38.
10. Izovac: ИК фильтры [Электронный ресурс]. – Режим доступа: http://www.izovac-coatings.com/products/ir_filters. – Дата доступа: март 2014.
References 1. State Committee of Ukraine for Technical Regulation and Consumer Policy (2004), 4277:2004
Normy i metody vymirjuvan' vmistu oksydu vuglecju ta vuglevodniv u vidprac'ovanyh gazah avtomobiliv z dvygunamy, shho pracjujut' na benzyni abo gazovomu palyvi [4277:2004 Limits and methods of measurement of carbon monoxide and hydrocarbons in the exhaust gases of vehicles with engines running on petrol or a gaseous fuel], State Committee of Ukraine for Technical Regulation and Consumer Policy, Kiev, Ukraine.
2. Lуkov, А.G. and Vovna, A.V. (2013), “Analysis of gas analyzers of road transport exhaust and ways to improve their accuracy”, Naukovi praci Donec'kogo nacional'nogo tehnichnogo universytetu. Serija “Obchysljuval'na tehnika ta avtomatyzacija”, no. 2(25)’2013, pp. 246-253.
3. IBSG. Mid infrared optoelectronics (2014), “LEDs 2.7-4.7 microns”, available at: http://www.ibsg.ru/led/led_2.html (Accessed 19 February 2014).
4. IBSG. Mid infrared optoelectronics (2014), “LEDs with a narrow range 2.7-4.7 microns”, available at: http://www.ibsg.ru/led/led_3.html (Accessed 20 February 2014).
5. Vovna, A.V., Zori, A.A., Korenev, V.D. and Hlamov, M.G. (2010), Metody i sredstva analiticheskogo izmerenija koncentracii gazovyh komponent i pyli v rudnichnoj atmosfere ugol'nyh shaht [Methods and means of the gas components concentration and dust analytical measuring in the mine atmosphere of coal mines], DonNTU, Donetsk, Ukraine.
6. Smith, A. (1982), Prikladnaja IK-spektroskopija [Applied Infrared Spectroscopy], Mir, Moscow, Russia.
7. Bresler, P.I. (1980), Opticheskie absorbcionnye gazoanalizatory i ih primenenie [Optical absorption gas analyzers and their application], Energiya, Leningrad, Russia.
8. Yakushenkov, U.G. (1999), Teorija i raschet optiko-jelektronnyh priborov: uchebnik dlja studentov vuzov [Theory and calculation of optoelectronic devices: a textbook for university students], Logos, Moscow, Russia.
9. Vovna, A.V., Zori, A.A., Lуkov, А.G. and Hlamov, M.G., (2010), “An optical chanel mathematical model of carbon monoxide concentration measuring device”, Naukovi praci Donec'kogo nacional'nogo tehnichnogo universytetu. Serija “Obchysljuval'na tehnika ta avtomatyzacija”, no. 18(169), pp. 34-38.
10. Izovac (2014), “Infrared filters”, available at: http://www.izovac-coatings.com/products/ ir_filters (Accessed 1 March 2014).
Надійшла до редакції: Рецензент: 29.04.2014 д-р техн. наук, проф. Зорі А.А.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: Обчислювальна техніка та автоматизація №1 (26)’2014
225
О.Г. Ликов, М.П. Косарєв ДВНЗ «Донецький національний технічний університет» Дослідження впливу ширини спектру випромінювання джерела на чутливість вимірювальних каналів газоаналізаторів вихлопних газів автомобільного транспорту. В якості джерел випромінювання обрані світлодіоди, спектри випромінювання яких відповідають спектру поглинання СО, але мають різницю в ширині спектру в (4÷5) разів. Встановлено, що звуження спектру випромінювання призводить до підвищення чутливості оптичної частини вимірювального каналу, однак ступінь звуження спектру впливає на лінійність зміни інформаційного параметра від зміни концентрації СО; найкращий результат спостерігається при співпадінні спектру поглинання газової складової і спектру випромінювання світлодіоду. Запропоновані шляхи підвищення оптичної потужності джерел випромінювання для збільшення співвідношення сигнал-шум при збереженні досягнутого ефекту збільшення чутливості, що полягають у модернізації оптичної частини вимірювальних каналів. Ключові слова: вимірювальний канал, світловипромінювальних діод, спектр випромінювання, ширина спектру, чутливість, шум, оптична потужність. А.G. Lуkov, N.P. Kosarev Donetsk National Technical University Influence of a radiation source spectral width on sensitivity of measurement channels of road transport exhaust gas analyzers. Light-emitting diodes LED46-TEC-PRW and LED-465-NS were selected as radiation sources for research (LED46-TEC-PRW as a base). Their emission spectrum coincides with a CO absorption spectrum, but has some spectrum width differences by (4÷5) times. We have found out that constriction of a radiation spectrum leads to increasing of the optical measuring channel sensitivity. But degree of the spectrum constriction influences on the linearity of information parameter changes as a function of concentration changes. LED-465-NS sensitivity increasing can achieve 3,4 times for CO concentrations range from 0,5 to 1 %; for CO concentrations range from 0 to 0.5 % the sensitivity does not increase. Usage of LED46-TEC-PRW with an optical filter (transmission range of wavelengths from 4.4 μm to 4.9 μm) provides sensitivity increasing by 2 times only. But dependence of information parameter from CO concentration for range from 0 to 1 % is a linear characteristic. So the best result is observed when the absorption spectrum of a gas component and the emission spectrum of the light emitting diode are the same. The studies also found that the increasing of the optical measuring channel sensitivity by the constriction of the LED’s radiation spectrum is accompanied by constriction of its optical power level, and accordingly the influence of noise and interference in the output signal are increasing. It eliminates the achieved increase of the informational component about CO concentration. We suggest ways to improve the optical power radiation sources based on modernization of the optical measuring channels for increasing a signal-to-noise rate (the achieved effect of the sensitivity increasing persists). In particular, we propose the usage of a broadband source and optical filter from photodiode side or usage of a light-emitting diode “gun” in an infrared range and focusing optical lens from photodiode side. Keywords: measuring channel, light-emitting diode, emission spectrum, spectrum width, sensitivity, noise, optical power.
Лыков Алексей Геннадьевич, Украина, закончил Донецкий национальный технический университет, ассистент кафедры электронной техники ГВУЗ «Донецкий национальный технический университет» (ул. Артема, 58, г. Донецк, 83001, Украина). Основное направление научной деятельности – устройства электропитания, электронные устройства и системы газового анализа.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
© Штепа А.А., 2014 226
УДК 681.518
А.А. Штепа (канд. техн. наук) ГВУЗ «Донецкий национальный технический университет», г. Донецк
кафедра электронной техники e-mail: [email protected]
ОБОСНОВАНИЕ КОНЦЕПЦИИ СТРУКТУРНО-АЛГОРИТМИЧЕСКОЙ ОРГАНИЗАЦИИ МОДУЛЬНОЙ КОМПЬЮТЕРИЗИРОВАННОЙ
ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНОЙ СИСТЕМЫ ЭЛЕКТРОФИЗИОЛОГИЧЕСКИХ СИГНАЛОВ
Приведена и обоснована концепция проектирования, позволяющая строить компьютеризированную информационно-измерительную систему на основе модульного принципа объединения измерительных каналов единой структуры, которая обеспечивает получение сопоставимых, стабильных, воспроизводимых результатов совместных измерений разнотипных низкоамплитудных электрофизиологических сигналов. Ключевые слова: электрофизиологический сигнал, информационно-измерительная система, модульная структура, цифровая обработка сигнала.
Общая постановка проблемы и актуальность Широкое распространение в клинической практике имеют методы
электрофизиологических исследований за счет своей информативности и хорошей воспроизводимости результатов в сочетании с минимальным воздей-ствием на обследуемого. Приоритетным направлением развития методологии электрофизиологических исследований сегодня становится разработка методов комплексного автоматизированного анализа, основанного на регистрации и совместном сравнительном анализе сигналов нескольких типов. Многообразие и сложность форм электрофизиологических сигналов (ЭфС), трудность формализации решаемых исследовательских задач осложняют использование электрофизиологических методов исследований и приводят к необходимости оптимизации для каждой конкретной задачи как аппаратных так и алгоритмических решений.
В последнее время, характеризующееся высоким темпом развития микроэлектроники и вычислительной техники, стремление разработчиков к усовершенствованию привело к появлению ряда медицинских приборов для электрофизиологических исследований, имеющих различные передаточные характеристики, что делает невозможным сопоставление результатов одновременных измерений.
Следует отметить, что обозначенная проблема обусловливает потребность в решении задач повышения достоверности информации о состоянии здоровья человека и перехода на более высокий уровень диагностирования при ограниченных ресурсах измерительных устройств для цифровой обработки ЭфС. Подлежащие этим задачам концепции неотъемлемо связаны с современными технологиями обработки информации и особенностями проектирования компьютеризованных информационно-измерительных систем (КИИС), а также должны базироваться на единых методах обработки разнотипных ЭфС, которые обеспечивают получение правильных, сопоставимых, стабильных и воспроизводимых результатов измерения в рамках комплексного диагностического исследования.
Постановка задач исследования Целью исследования является разработка и обоснование концепции проектирования,
позволяющей строить КИИС ЭфС на основе модульного принципа объединения

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
227
измерительных каналов единой структуры и дальнейшей цифровой обработки сигнала, которая обеспечивает получение сопоставимых, стабильных, воспроизводимых результатов совместных измерений разнотипных низкоамплитудных электрофизиологических сигналов.
Изложение основного материала Биопотенциалы, являющиеся источниками ЭфС для разных электрофизиологических
исследований, являются весьма малыми по амплитуде и занимают области низких и инфранизких частот [1]. Диапазоны значений для ЭфС разного происхождения в значительной мере пересекаются, что дает потенциальную возможность объединить измерения нескольких ЭфС в рамках измерения единой ИИС табл. 1.
Таблица 1
Характеристики биопотенциалов тканей и органов Органы, ткани Диапазон частот, Гц Диапазон амплитуд, мкВ
Сердце 0,05–2000 30–5000
Головной мозг: на поверхности скальпа
на открытом мозге
3,5–40 0,1–120
2–200
50–5000 Желудок 0,02–0,5 10–10000
Мышечные ткани 5–5000 100–10000 Глазные мышцы 0,5–50 2–200 Костные ткани менее 1 до 10000 Спинной мозг:
медленные колебания быстрые колебания
2–10 8–30
10–20 40–60
Программное и алгоритмическое обеспечение играют важную роль в системах
измерения и регистрации ЭфС, которая определяет функциональность и потребительские свойства таких систем. Базовое требование к программному обеспечению заключается в обеспечении высокой степени достоверности измерения временных и амплитудных параметров структурных элементов ЭфС (интервалов, зубцов, сегментов, волн, комплексов), на основании которых врач будет проводить постановку диагноза. В подавляющем большинстве случаев обработка ЭфС может быть представлена следующие тремя этапами: сглаживание и фильтрация ЭфС; обнаружение и измерение характерных структурных элементов формы ЭфС; постановка диагностического заключения.
Единство или значительное перекрытие диапазонов большинства основных параметров ЭфС позволяет решать задачу одновременного измерения нескольких разнотипных сигналов с помощью КИИС, в основе которой лежит модульный принцип объединения измерительных каналов единой универсальной для всех ЭфС структуры. При этом обеспечивается возможность оператору самому определять необходимые для съема электроды. Более того, возможно создание модульных электрокардиографов или КИИС с широким спектром измеряемых ЭфС, в которых для усложнения схемы отведений достаточно добавить недостающее количество измерительных каналов и модифицировать программное обеспечение. С ростом числа каналов существенно снижаются удельные затраты для получения каждого нового отведения при общей высокой надежности устройства – это повышает эффективность применения КИИС в целом.
Наибольший же интерес такая структура представляет для научных исследований. Возможность сравнительно простого и быстрого изменения набора исследуемых электрофизиологических параметров наряду с идентичным строением измерительных каналов обеспечивают возможность проведение широкого круга экспериментов, данные которых могут быть адекватно сопоставлены как в пределах одного измерения, так и по всему циклу экспериментальных исследований. Модульность структуры в целом и идентичность измерительных каналов обеспечивает также возможность одновременного

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
228
измерения различных электрофизиологических сигналов одного объекта, что является актуальным направлением исследований в современной медицинской диагностике.
Анализ особенностей электрофизиологических сигналов, методов их исследования и обработки, исследование искажений сигналов КИИС ЭфС, вносимых собственными звеньями измерительных каналов позволяют сформулировать базисные функции КИИС. Разрабатываемая КИИС предназначена для измерения ЭфС и предоставления возможности дальнейшей обработки с целью применения любых методов диагностического анализа. Важнейшим условием, определяющим потребность в разработке и применении указанной ИИС, является обеспечение получения правильных, сопоставимых, стабильных и воспроизводимых результатов измерений в рамках единого комплексного диагностического исследования, базирующегося на совместном одновременном измерении и анализе нескольких разнотипных ЭфС. Базисными функциями системы являются: измерение ЭфС разных типов; обеспечения сопоставимости результатов измерений для разных ЭфС, одновременно измеряемых в ходе одного исследования; преобразование ЭфС с целью приведения их параметров в соответствие с требованиями применяемых в дальнейшем методов медико-диагностического анализа; оценку потерь информации причиненных эффектом Гиббса при цифровой обработке сигналов на основе ПФ в условиях работы с малым объемом выборки; хранение и документирование результатов измерений.
В соответствии с вышеизложенным, проведен анализ базисных функций. Функция измерения ЭфС разных типов, должна обеспечивать измерение в широких динамических пределах, ограниченных общим динамическим диапазоном разных ЭфС и общей полосой частот (табл. 1). Расширение динамического диапазона КИИС может быть достигнуто увеличением разрядности АЦП по сравнению с требуемой для регистрации ЭфС каждого типа. Доступные на сегодня микросхемы позволяют использовать АЦП с числом двоичных разрядов от 10-ти до 19-ти (например сигма-дельта АЦП) при приемлемой для ЭфС частоте дискретизации.
Обеспечение сопоставимости результатов измерений для разных ЭфС может достигаться разными способами. Зафиксировать некую схему для работы с ЭфС конкретного типа и требовать от производителей оборудования строгого соблюдения предложенного схемотехнического решения не представляется возможным, поскольку это остановило бы любые разработки техники в этой области. Существует метод восстановления (коррекции) сигнала с использованием апостериорной обработки, которая позволяет получить выходной сигнал наиболее близкий к входному. При этом получить функцию корректирующую искажения, вносимые каналом измерения можно либо измеряя ее с некоторой периодичностью и высокой точностью, либо воспользоваться математической моделью канала, что было бы приемлемо при несложном устройстве канала и высокой стабильности его компонентов. Несмотря на то, что методы такой коррекции применяются в некоторых областях довольно успешно, известно, что при наличии малейших ошибок измерений и помех на восстановленный таким образом сигнал накладывается случайная ложная структура и выигрыш, ожидаемый от компенсации систематических погрешностей измерительного канала становится незначительным. В этой ситуации хорошим выходом является использование в разработанной КИИС принципа построения измерительных каналов единой унифицированной структуры для всех типов ЭфС.
Основными источниками фазовых искажений сигнала являются фильтры высоких порядков, имеющих равномерную АЧХ в полосе пропускания и резкие ее спады, но весьма нелинейную ФЧХ. Исключение таких фильтров из аналоговой части измерительного канала позволяют значительно уменьшить проблему фазовых искажений. Применение цифровых фильтров позволяет получить все преимущества фильтров высокого порядка, при этом решение проблемы нелинейности ФЧХ сводится к применению известного способа повторной фильтрации сигнала в обратном направлении.
ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
229
Оценка потерь информации, причиненных эффектом Гиббса при цифровой обработке сигналов на основе ПФ становится актуальной в условиях работы с малым объемом выборки. А ограничение на объем выборки в КИИС ЭфС накладываются сразу несколькими обстоятельствами. Во-первых, анализ ЭфС обычно сводится к тонкому исследованию формы единственного периода кардиограммы или реографического сигнала [2, 3]. При этом для анализа выбирают 5-7 периодов сигнала наименее искаженных артефактами физиологического происхождения (шевеления, неравномерного дыхания, спазмов и т.д.), а такие участки обычно имеют малую длительность. Во-вторых повышение разрядности АЦП приводит к ограничению частоты дискретизации, поэтому ее увеличением затруднительно значительно увеличить объем выборки. И в-третьих, увеличение объема выборки приводит к значительному увеличению времени обработки сигнала при использовании ПФ.
Хранение и документирование результатов измерений для КИИС ЭфС выполняется средствами входящего в состав системы компьютера. При этом важной особенностью организации данных является хранение вместе с измерительным сигналом всех параметров самого измерительного канала, включая те, которые были модифицированы оператором непосредственно перед измерением. Эти важные данные и могут понадобиться при необходимости сопоставления сигналов, полученных в ходе разных диагностических исследований.
Таким образом, расширение функциональных возможностей КИИС ЭфС за счет унификации структуры измерительных каналов и повышения точности путем коррекции искажений, вносимых при цифровой обработке [4], достигается реализацией концепции построения модульной структуры системы, в основу которой положены следующие принципы:
¬ единство конструкции всех измерительных каналов за счет исключения из их состава блоков, характерных для конкретного вида электрофизиологических сигналов и способных вносить серьезные искажения в сигнал за счет нелинейности ФЧХ;
¬ передача максимального числа функций преобразования измерительных сигналов в область последующей цифровой обработки, обеспечивающей все достоинства цифровых фильтров высокого порядка и лишенной проблем нелинейности ФЧХ (такой подход актуален для новых видов исследований в кардиологии и гемодинамике [5, 6, 7], которые подразумевают весьма широкое применение методов цифровой обработки сигналов;
¬ использование высокоразрядных АЦП (как, например, сигма-дельта преобразователи применяющиеся для электрокардиографии высокого разрешения [8]) с целью обеспечения охвата общего требуемого динамического диапазона всего комплекса контролируемых электрофизиологических параметров с учетом помех в каждом из каналов.
При переходе от аналоговой схемотехники электрокардиографов к полностью цифровой обработке появляется потребность в цифровых фильтрах ЭфС. Фильтрация в частотной области обеспечивает большую точность восстановления сигнала и более крутые фронты характеристик. Задача восстановления сигнала с помощью корректирующего фильтра в ряде случаев может быть совмещена с фильтрацией, требуемой методами анализа медицинской диагностики. Например, для выделения некоторой полосы частот или подавления помехи, сконцентрированной в известной полосе в соответствии с существующими стандартами и рекомендациями [9, 10]. В любом случае фильтрацию проводят на ограниченном частотном диапазоне, где сосредоточена информативная часть сигнала и передаточная функция измерительного канала не равна нулю. Для устранения искажений, связанных с нелинейностью фильтра-корректора, фильтрацию проводят повторно на выборке с измененным на противоположный порядком элементов, а затем возвращают их исходный порядок. На основании проведенных исследований метод цифровой обработки электрофизиологических сигналов можно сформулировать в виде следующего алгоритма (рис. 1).

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
230
Начало
Определение H(? )
Вычисление1/H(? )
Выбор весового окна
G(t)
)()()( tGtxtxG
ЦОС)()()(
tGtxty G
Конец
)()'(' tnxtx G
ЦОС
)'(')( tnxtxG
1
2
3
4
5
6
7
8
9
Рисунок 1 - Блок-схема метода цифровой обработки электрофизиологических сигналов 1. Определение передаточной функции каждого измерительного канала H(ω). Это
можно осуществить двумя способами: измерением или вычислением. Измерение передаточной функции измерительного канала – задача сложная сама по себе и требует применения специального оборудования. Такой путь может быть оправдан только в случае применения измерительного канала сложной структуры. Повышение требований к стабильности номиналов компонентов схемы в этом случае дает основание предполагать необходимость периодического измерения и корректировки H(ω). Структура измерительного канала подразумевает отсутствие сложных фильтров или усилителей со специфичной передаточной функцией. Поэтому определение H(ω) целесообразно проводить аналитическим вычислением исходя из данных об усилителе и ФНЧ, входящих в состав интегральных схем составляющих измерительный канал. При этом следует учитывать, что обычно такие усилители имеют достаточную линейность характеристик, а фильтры нижних частот малый порядок. Кроме того эти компоненты в интегральном исполнении отличаются также и высокой стабильностью своих характеристик и параметров.
2. Вычисление передаточной функция корректирующего фильтра 1/H(ω). Если для дальнейшей обработки предполагается прямая свертка во временной области, то вычисляем импульсную характеристику (обратное ДПФ от передаточной характеристики).
3. Выбор весового окна, оптимального с точки зрения уменьшения краевых искажений. При этом критерий выбора должен учитывать в первую очередь искажение формы сигнала во временной области, поскольку именно форма сигнала (а не спектр или мощность) являются наиболее информативным с точки зрения медикодиагностического анализа ЭфС в подавляющем большинстве случаев. Исследования показали, что наиболее эффективными в этом отношении являются окна Блэкмана, Ханна и окно Кайзера [4].
4. Умножение сигнала полученного с помощью i-го измерительного канала xi(t) на функцию весового окна.
5. Осуществление фильтрации для восстановления сигнала. Дополнительная фильтрация сигнала в соответствие с применяемой методикой обработки для анализа ЭфС.
6. Отображение результата фильтрации в обратном порядке. 7. Повторная фильтрация с целью устранения искажений связанных с нелинейностью
ФЧХ фильтра-корректора.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
231
8. Восстановление порядка значений корректируемого сигнала 9. Деление на функцию весового окна. Анализ результатов Предложенная компьютеризированная ИИС будет отличаться схемотехническими и
алгоритмическими решениями, подчиняющимися предложенной концепции, в соответствии с которой обеспечивается получение достоверных, сопоставимых, стабильных и воспроизводимых результатов измерения разнотипных электрофизиологических параметров.
При проектировании ИИС на основе алгоритма апостериорного цифрового восстановления сигналов появляется возможность полностью отказаться от ФВЧ с его крупногабаритными высокостабильными конденсаторами, поскольку набор высококачественных цифровых ФВЧ – реализуется программным способом или работа вовсе ведется с нулевой нижней частотой, что свойственно приборам в сфере научных исследований. В составе унифицированного измерительного канала входит усилитель и ФНЧ, с параметрами, охватывающими весь спектр ЭфС, а проблема расширения динамического диапазона решается применением АЦП с большой разрядностью.
Выводы На основании анализа современных методов электрофизиологического исследования
выделена актуальная тенденция к увеличению комплексных диагностических исследований с необходимостью одновременного измерения и совместного анализа разнотипных электрофизиологических сигналов, что поднимает проблему получения сопоставимых, стабильных и воспроизводимых результатов таких измерений.
Предложена концепция построения модульной структуры КИИС электрофизиологических сигналов, в основу которой положены следующие принципы: единство конструкции всех измерительных каналов за счет исключения из их состава блоков, характерных для конкретного вида электрофизиологических сигналов; передача максимального числа функций преобразования измерительных сигналов в область последующей цифровой обработки; использование высокоразрядных АЦП с целью обеспечения охвата общего требуемого динамического диапазона всего комплекса контролируемых электрофизиологических параметров с учетом помех в каждом из каналов.
Список использованной литературы 1. Съем и обработка биоэлектрических сигналов: Учеб. пособие / [К.В. Зайченко, О.О.
Жаринов, А.Н. Кулин и др.]; под ред. Зайченко К.В. – СПб.: СПБГУАП, 2001. – 140 с. 2. Орлов B.H. Руководство по электрокардиографии / B.H. Орлов. – М.: Медицинское
информационное агентство, 2007. – 528 c. 3. Кардиомониторы. Аппаратура непрерывного контроля ЭКГ: [учеб. пособие для вузов] /
[А. Л. Барановский, А. Н. Калиниченко, Л.А. Манило и др.]; под ред. А.Л. Барановского и А.П. Немирко. – М.: Радио и связь, 1993. – 248 с.
4. Штепа А.А. Метод исследования и оценки методической погрешности цифровой обработки сигналов в измерительных каналах ИИС электрофизиологической диагностики / А.А. Штепа // Збірник наукових праць Донецького інституту залізничного транспорту Української державної академії залізничного транспорту. – 2012. – Вип. 32. – С. 110–116.
5. Rudenko M. Theoretical Principles of Heart Cycle Phase Analysis / Rudenko M., Voronova O., Zernov V. – New York : Fouqué Literaturverlag, 2011. – 415 p.
6. Konstantine Mamberger. General problems of metrology and indirect measuring in cardiology: error estimation criteria for indirect measurements of heart cycle phase durations; in e-Journal Cardiometry No.1, 2012; С. 152-165.
7. Vladimir Fedorov, Konstantine Mamberger. Wavelet transform procedure as the basis for complete automatic interpretation of the cardiac cycle phase structure; in e-Journal Cardiometry No-1, 2012; pp. 125-131.

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
232
8. Curtin M. Sigma-Delta techniques reduce hardware count and power consumption in biomedical analog front end / M. Curtin // Analog Dialogue Journal. – 1994. – V. 28. –№ 2. – P. 6–8
9. Recommendation for standardization and specification in automated electrocardiography: bandwidth and digital signal processing. A report for health professionals by an ad hos writing group of the committee on electrocardiography and cardiac electrophysiology of the Council on Clinical Cardiology / J. J.Bailey, A. S.Berson, A.Garson [et al.] // American Heart Association. – Circulation. – 1990. – V. 81. – 730 p.
10. AAMI Standards and Recommended Practices, Biomedical Equipment. AAMI. – Arlington, Virg., 1993. – V. 2 – 4th ed. – 230 p.
References 1. Zaychenko, K. V., Zharinov, O.O., Kulin, A.N. and others, (2001), S'em i obrabotka
bioelektricheskih signalov: Ucheb. posobie, in Zaychenko, K.V., St.-Petersburg, Russia. 2. Orlov B.H. (2007) Rukovodstvo po elektrokardiografii / Meditsi-nskoe informatsionnoe agentstvo,
Moscow, Russia. 3. Baranovskiy, A. L., Kalinichenko, A. N., Manilo, L.A. and jthers (1993), Kardiomonitoryi.
Apparatura nepreryivnogo kontrolya EKG : Ucheb. posobie dlya vuzov, in Baranovskiy, A.L. and Nemirko, A.P., Radio i svyaz, Moscow, Russia.
4. Shtepa, A.A., (2012), “Metod issledovaniya i otsenki metodicheskoy pogreshnosti tsifrovoy obrabotki signalov v izmeritelnyih kanalah IIS elektrofiziologicheskoy diagnostiki”, Zbirnik naukovih prats Donetskogo Institutu zaliznichnogo transportu Ukrayinskoyi derzhavnoyi akademiyi zaliznichnogo transportu. Donetsk, vol. 32., pp. 110–116.
5. Rudenko, M., Voronova, O. and Zernov, V., (2011), Theoretical Principles of Heart Cycle Phase Analysis, Fouqué Literaturverlag, New York.
6. Mamberger, K., (2012), “General problems of metrology and indirect measuring in cardiology: error estimation criteria for indirect measurements of heart cycle phase durations”, e-Journal Cardiometry No.1, pp. 152–165.
7. Fedorov, V. and Mamberger, K., (2012) “Wavelet transform procedure as the basis for complete automatic interpretation of the cardiac cycle phase structure”,e-Journal Cardiometry, no.1,pp.125–131.
8. Curtin M., (1994), “Sigma-Delta techniques reduce hardware count and power consumption in biomedical analog front end”, Analog Dialogue Journal, vol. 28, no. 2, pp. 6–8.
9. Bailey, J. J., Berson, A. S., Garson, A. [et al.] (1990), Recommendation for standardization and specification in automated electrocardiography: bandwidth and digital signal processing. A report for health professionals by an ad hos writing group of the committee on electrocardiography and cardiac electrophysiology of the Council on Clinical Cardiology, American Heart Association. v.81.
10. AAMI (1993), AAMI Standards and Recommended Practices, Biomedical Equipment. Arlington, Virg., vol. 2, 4th ed.
Надійшла до редакції: Рецензент: 20.05.2014 д-р техн. наук, проф. Зорі А.А.
О.А. Штепа ДВНЗ «Донецький національний технічний університет» Обґрунтування концепції структурно-алгоритмічної організації модульної комп'ютеризованої інформаційно-вимірювальної системи електрофізіологічних сигналів. Наведено і обґрунтовано концепцію проектування, що дозволяє будувати комп'ютеризовану інформаційно-вимірювальну систему на основі модульного принципу об'єднання вимірювальних каналів єдиної структури, яка забезпечує отримання порівнянних,

ISSN 2075-4272 Наукові праці ДонНТУ. Серія: обчислювальна техніка та автоматизація №1 (26)’2014
233
стабільних, відтворюваних результатів спільних вимірювань різнотипних низькоамплітудних електрофізіологічних сигналів. Ключові слова: електрофізіологічний сигнал, інформаційно-вимірювальна система, модульна структура, цифрова обробка сигналів.
A.A. Shtepa Donetsk National Technical University Substantiation of the structural-algorithmic organization concept for modular electrophysiological signals computerized information-measuring system. The paper presents a design concept, which allows building a computerized information and measuring system based on a modular principle of combining the unified structure measurement channels, that provides comparable, stable, reproducible measurements of different types of low-amplitude joint electrophysiological signals. A proposed computerized information-measuring system will be distinguised by circuit and algorithmic solutions that obey the proposed concept, which provides credible, comparable, stable and reproducible measurement results for diverse electrophysiological parameters. When designing information-measuring systems on the basis of the algorithm of a posteriori digital recovery signals there is a possibility to completely abandon the high pass filter with its large solid-state capacitors, as a set of high quality digital filters is implemented programmatically or the work involves only zero lower frequency, which is typical of instruments in the field of scientific research. A unified measurement channel includes a power amplifier and a high-pass filter, with parameters covering the whole range of electrophysiological signals, and the problem of expansion of dynamic range is solved by the use of ADC with high resolution. On the basis of the analysis of modern methods of electrophysiological study we highlighted the current trend towards increasing comprehensive diagnostic investigations with the necessity of simultaneous measurement and joint analysis of different types of electrophysiological signals. It raises the problem of obtaining comparable, stable and reproducible results of such measurements. We propose a concept of construction of the modular structure of a computer-aided information-measuring system of electrophysiological signals, based on the following principles: unity of design for all measuring channels by excluding them from their units, specific types of electrophysiological signals; transfer of the maximum number of conversion functions of measuring signals in the area of subsequent digital processing; the use of ADC with high resolution to reach the required total dynamic range of the whole complex of controlled electrophysiological parameters, taking into account interference in each of the channels. Keywords: electrophysiological signal, information-measuring system, modular structure, digital signal processing.
Штепа Александр Анатольевич, Украина, закончил Донецкий государственный технический университет, канд. техн. наук, доцент кафедры электронной техники ГВУЗ «Донецкий национальный технический университет» (ул. Артема, 58, г. Донецк, 83001, Украина). Основное направление научной деятельности – регистрация, выделение и обработка электрофизиологических сигналов.


НАУКОВЕ ВИДАННЯ
Наукові праці Донецького національного технічного університету
Серія: «Обчислювальна техніка та автоматизація»
№ 1(26)’2014 (українською, російською, англійською мовами)
Адреса редакції: Україна, 83001, м. Донецьк, вул. Артема, 58, 1-й учбовий корпус, к. 1.006, т.(062) 301-07-95
Редагування та коректура: О.М. Гарматенко, А.В. Зиль, Т.М. Шламенок
Підписано до друку 23.06.2014. Формат 60841/16 Папір офсетний. Друк різографія.
Ум. друк. арк. 26,79. Обл.-вид. арк. 16,22 Тираж 300 прим. Замовлення № 45
Видавець: Державний вищий навчальний заклад «Донецький національний технічний університет». Україна, 83001, м. Донецьк, вул. Артема, 58. Тел.: (062) 301-08-67
Свідоцтво про державну реєстрацію суб’єкта видавничої справи: серія ДК №2982 від 21.09.2007 Надруковано: РВВ Видавництво «Донецька політехніка», Україна, 83001, м. Донецьк, вул. Артема, 58. Тел.: (062) 301-09-67