Embed Size (px)
Citation preview

Лекция 6-7 по дисциплине «Электропривод машин химического
производства и предприятий строительной индустрии»
Тема:
2.1.5 Особенности ЭП РМО и способы автоматизации их работы 2.1.5.1 Электропривод установок по перемещению жидкостей и газов:
Рациональное применение механических характеристик механизмов и
электродвигателей. Специальные ЭА, которые используются в схемах
автоматического регулирования. Принципиальная электрическая схема
автоматического регулирования воды в резервуаре..
Цель: Изучить устройство установок по перекачке жидкостей и газов, а также
устройства, помогающие автоматизировать процесс перекачки. Научиться
выбирать двигатели для этих установок.
Для перекачки жидкостей и газов, а также для получения сжатых газов
используют механизмы поршневого и центробежного типов.
Режим работы механизмов центробежного типа определяется тремя
величинами: подачей Q ; напором Н и угловой скоростью ω . Эти величины
опредляют также момент сопротивления и мощность на валу механизма .
Основы теории механимов центробежного типа были разработаны Л.
Эйлером.
Для механизмов центробежного типа справедливы законы
пропорциональности, которые можно записать в следующем виде:
Производительность Q механизмов центробежного типа пропорциональна
угловой скорости вращения вала двигателя.
Напор Н механизмов центробежного типа пропорционален квадрату угловой
скорости вращения вала двигателя.
Отношение напоров механизмов центробежного типа прямо
пропорционально отношению квадратов их производительности.
Эклсплуатацонные свойства механизмов центробежного типа опрделяются
Q–Н-характеристикой и зависимостью КПД от подачи при ω=соnst .
Теоритически расчет указанных характеристик представляют большие
трудности, поэтому на практике пользуются экспериментальными
зависимостями Н =f(Q) и η =φ(Q), которые приводятся в каталогах насосов
для незменной номинальнойй скорости .Чтобы получить Q– Н-
характеристики для скорости, отличной от номинальной пользуются
законами пропорциональности

Рис. 1 Q-Н характеристики центробежного аппарата.
Кривые Q-Н отвечают аппаратам центробежного типа, т.е. центробежным
насосам, центробежным вентиляторам, центробежным компрессорам. При
подсоединении таких аппаратов к асинхронным двигателям они выступают
для него как нагрузки, подчиняющиеся следующему закону:
Н = kw2=с Q
2
Если на одном графике нарисовать характеристики центробежного аппарата
(например, насоса) и двигателя , который приводит этот насос в движение, то
точка пересечения этих характеристик определить скорость с которой
двигателя будет вращать насос, его производительность и напор.
Если аппарат ( например, центробежный насос) подключен к магистрали, в
которой действует статическое давление Нст, то полный напор в системе
будет складываться из статического Нст и динамического Ндин, причем
динамическая составляющая напора пропорциональна согласно законам
пропорциональности квадрату скорости или квадрату производительности.
Н= Нст + Ндин = Нст + с Q2
В системах с преобладанием статического напора, кривая с (Рис.1 а)
незначительное уменьшение скорости двигателя от wн до w3 приведет к
тому, что кривые не пересекутся. Это означает, что насос перестанет качать
жидкость. Такое положение может наступить при асинхронном приводе, если
например, снизится напряжение сети, которое может вызвать снижение
скорости двигателя, а следовательно и останов насоса. Если в системе
преобладает динамический напор, кривая д (Рис. 1 а), то небольшое
снижение напряжения сети не способно вызвать останов насоса, однако
производительность насоса уменьшится.
При синхронном приводе насоса снижение напряжения сети не приведет к
снижению скорости, а следовательно и производительности, но вызовет
увеличение угла отставания θ ротора от вращающегося поля статора и
уменьшение Ммах синхронного двигателя. При значительном снижении
напряжения двигатель может выпасть из синхронизма и остановиться.
Транспортировка и получение сжатых газов

Для перемещения газов используются компрессоры и вентиляторы.
Компрессоры используются для получения сжатого воздуха или другого газа
давлением свыше 4×105 Па (4 кгс/см
2 или 4атм). Причем в аппаратах
центробежного типа (ротационные ) получают сжатые газы до 15 ×105 Па, в
турбинных - 6×105 Па.
В аппаратах поршневого типа получают давления до 1000×105 Па в
сравнительно небольшом количестве. Высокие давления газов могут быть
получены только в многоступенчатых компрессорах, в которых газ
сжимается последовательно в нескольких цилиндрах или камерах.
Угловая скорость рабочего вала компрессора составляет у поршневых :
30-75 с-1
(290-720об/мин),
у ротационных - 300с-1
(2900об/мин),
у турбинных – 1200 с-1
(11600 об/мин).
Вентиляторы предназначены для вентиляции производственных
помещений, отсасывания газов, подачи воздуха или газа в камеры
электропечей в котельных и других установках. Вентиляторы создают
перепад давления (0,01-0,1) ×105 Па. По конструкции вентиляторы делятся на
центробежные и осевые. Наибольшее распространение в промышленности
получили центробежные вентиляторы.
Особенности электропривода и выбор мощности двигателей
компрессоров и вентиляторов.
Для механизмов данной группы типичен продолжительный режим работы
S1, поэтому их электроприводы, как правило, нереверсивные, с редкими
пусками. Компрессоры и вентиляторы имеют небольшие пусковые
статические моменты – до (0,2-0,25) Мн. В зависимости от назначения,
мощности и характера производства , где установлены эти механизмы, они
могут требовать небольшого, но постоянного подрегулирования
производительности при отклонении параметров воздуха или другого газа от
заданных значений , или же регулирования производительности в широких
пределах.
Производительность компрессоров и вентиляторов и воздуходувок можно
изменять тремя способами:
Изменением скорости приводного двигателя,
Изменением сопротивления магистрали (трубопровода) с помощью
задвижек,
Конструктивным изменением рабочих органов механизма в процессе
регулирования (поворотные лопатки в вентиляторах и т. п.).
Для вентиляционных установок цеховых помещений обычно не требуется
регулирование угловой скорости приводных двигателей. Поэтому здесь
применяют асинхронные двигатели с короткозамкнутым ротором и
синхронные двигатели. При мощностях двигателей больше 50 кВм привод с
синхронным двигателем оказывается экономически более выгодным, хотя

синхронные двигатели сложнее по устройству и дороже. Применение их
целесообразно для одновременного улучшения соs φ предприятия.
Поскольку поршневой компрессор при работе создает на валу периодически
изменяющийся момент сопротивления, что создает колебания скорости
ротора синхронного двигателя . Чтобы уменьшить такие колебания и
устранить возможность выпадания двигателя из синхронизма, для привода
поршневых компрессоров применяют специальные тихоходные синхронные
двигатели ( w0= 26,2-31,4 с-1
) с большой перегрузочной способностью,
повышенным моментом инерции ротора и большим значением входного
(синхронизирующего момента). При достаточно мощной сети можно
осуществить прямой пуск двигателей, при недостаточно мощной сети
осуществляют плавный, затянутый пуск двигателей.
Если необходимо регулировать скорости вентиляторов, воздуходувок или
дымососов в котельных, то применяют или фазные асинхронные двигатели
или асинхронные двигатели с короткозамкнутым ротором, питаемым через
преобразователь частоты.
Мощность двигателей находят по мощности на валу механизма с учетом
потерь в промежуточных передачах.
Мощность двигателя поршневого компрессора Рдв. к находят по формуле:
3
. 3
10дв к
k р
QAP k
,
где Q – производительность (подача) компрессора, м3/час;
А=(А1+А2)/2- работа изотермического и адиабатического сжатия 1 м3
воздуха давлением 1.01×105 Па до требуемого давления р2 , Дж/м
3;
Значения этих работ можно найти в справочниках по компрессорам.
ηк, ηр – кпд компрессора (обычно 0,6-0,8) и механической передачи между
компрессором и двигателем (обычно 0,9-0,95);
k3 – коэффициент запаса, обычно принимаемый 1,05-1,15.
Мощность двигателя вентилятора можно вычислить по формуле:
3
3
10.
в п
Q HPдв в k
, где
Q- производительность вентилятора, м3/час;
Н – напор ( давление ) газа в Па,
ηв, ηп – кпд вентилятора, обычно принимаемого 0,5-0,85 для осевых , 0,4-0,7
для центробежных и кпд механической передачи;
k3 – коэффициент запаса, равный 1,1-1,2 при мощности больше 5 кВт,
1,5 – при мощности до 2 кВт, и 2- при мощности до 1 кВт.
Перекачка жидкостей центробежными насосами. Перекачку жидкостей можно осуществлять с помощью поршневый и
центробежных насосов. Наиболее употребительны в промышленности и быту
центробежные насосы, которые и будут рассмотрены ниже.

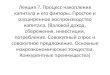
Рис.2 Общий вид установки с центробежным насосом.
В спиральном корпусе 1 насоса помещается рабочее колесо 2 с лопатками.
При вращении колеса двигателем Д жидкость, поступающая к центру
колеса из заборного резервуара 6 через всасывающий трубопровод 7 и
открытую задвижку 8 центробежной силой выбрасывается по лопаткам на
периферию корпуса. В результате в центре рабочего колеса создается
разряжение, жидкость засасывается в насос, снова выбрасывается лопатками
на периферию корпуса и далее подается в напорный трубопровод 3. Таким
образом в системе при открытой задвижке 5 создается непрерывное течение
жидкости и центробежный насос имеет равномерный ход.
Необходимо помнить при запуске центробежного насоса , что он должен
быть заполнен жидкостью. Насос может находиться как ниже, так и выше
уровня жидкости, подлежащей перекачке. Если он расположен ниже уровня
жидкости , подлежащей подъему, то для его заливки достаточно открыть
вентиль 8. Если же насос находится выше уровня перекачиваемой
жидкости, то часто применяют специальные бачки ( аккумуляторные бачки).
Такой бак устанавливают выше уровня насоса . Через него проходит
всасывающий трубопровод и после остановки насос оказывается залитым
жидкостью, как если бы он оказался ниже заборного уровня.
После заливки жидкостью насос может быть включен. Применяются три
способа пуска центробежных насосов:
При закрытой напорной задвижки 5. В этом способе плавно повышается
давление в напорном трубопроводе и исключается гидравлический удар в
системе. От двигателя не требуется повышенный пусковой момент, т.к. пуск
происходит практически холостым ( в начале пуска пусковой момент
составляет (0,10-0,20) Мн , в конце пуска, - ( 0,3-0,4) Мн. При этом способе
много времен тратится на последующее открытие задвижки 5.
Пуск при открытой напорной задвижки 5 с обратным клапаном 4. В этом
случае не тратится время на открытие задвижки 5 и общее время пуска

меньше, чем в первом случае, но сам двигатель имеет больше время пуска из-
за увеличения Мс.
Особенности электропривода и выбор мощности двигателя
насосов. Центробежные насосы выбираются обычно быстроходными, поэтому и
приводные двигатели их тоже быстроходны (w0 =150-300 с-1
)
Мощность двигателя насоса определяется по формуле:
3( ) 10c
nom п
g Q H HPдв k
, где
ρ –плотность перекачиваемой жидкости, кг/м3;
g – ускорение свободного падения, м/с2;
Q – производительность насоса, м3/с;
Нс – статический напор, определяемый , как сумма высот всасывания hв и
нагнетания hн, м;
ΔН – потеря напора в трубопроводе насосной установки, м .Зависит от
сечения трубопровода, наличия задвижек, вентилей и т. д.;
ηном – кпд насоса, принимаемый для поршневых насосов 0,7-0,9, для
центробежных с давлением свыше 0,4 105 Па -0,6-0,75 ; с давлением до
0,4 105 Па – 0,45-0,6.
ηп – кпд передачи, равный 0,9-0,95
k – коэффициент запаса, принимаемый обычно 1,1-1,3
Автоматизация работы вентиляторных установок.
Включение аппаратов центробежного типа для перекачки и сжижения газа
может осуществляться вручную с использованием схемы включения
асинхронного двигателя, рассмотренную на лекции 4.
Используя специальные электрические аппараты можно создать
автоматические схемы включения и выключения этих установок. Схема
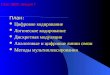
автоматизации перекачки жидкости показана на рис.
3
Рис.3 схема автоматизации перекачки жидкости

В данной схеме возможно два способа включения двигателя насоса: ручной и
автоматический.
Первый способ-ручной. Выбор способа производится с помощью ключа КУ.
При переключении ключа в положение Р (ручное) управление насосом
осуществляется по обычной схеме включения асинхронного двигателя. Для
заливки насоса используется бачок 1. При установке ключа КУ в положение
А, автоматическое включение двигателя осуществляется от датчика уровня
РУ. Принцип действия его показан на
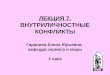
Рис.4 схема электрического датчика уровня
Датчики данного типа применяются при перекачке токопроводящий
жидкостей. При касании жидкости первого электрода происходит замыкание
цепи. Срабатывают нормально разомкнутые контакты и размыкаются
нормальнозамнутые. При опускании жидкости ниже уровня электрода 2.
происходит разрыв цепи и нормальнозамкнутый электрод замыкается,
нормальноразомгнутый наоборот. Когда резервуар полный двигатель
включается для перекачки этой жидкости, когда его уровень ниже конца
второго электрода , двигатель выключается.

Существует целый ряд устройств (специальных реле, датчиков), которые
помогают автоматизировать процесс перекачки жидкостей и газов.
Рис. 5 Реле контроля заливки насоса.
Дополнение

.