Embed Size (px)
DESCRIPTION
数字滤波器结构 DF (Digital Filter). 一、什么是数字滤波器. 顾名思义:其作用是对输入信号起到滤波的作用;即 DF 是由差分方程描述的一类特殊的离散时间系统。 它的功能:把输入序列通过一定的运算变换成输出序列。不同的运算处理方法决定了滤波器的实现结构的不同。. 数字滤波器介绍. Digital filters are used for two general purposes: (1) separation of signals that have been combined, - PowerPoint PPT Presentation
Citation preview

数字滤波器结构DF
( Digital Filter)

一、什么是数字滤波器• 顾名思义:其作用是对输入信号起到滤波的作用;即 DF 是由差分方程描述的一类特殊的离散时间系统。• 它的功能:把输入序列通过一定的运算变换成输出序列。不同的运算处理方法决定了滤波器的实现结构的不同。

数字滤波器介绍• Digital filters are used for two general
purposes:• (1) separation of signals that have been
combined, • (2) restoration of signals that have been
distorted in some way.

研究 DF 实现结构意义1. 滤波器的基本特性(如有限长冲激响应 FIR 与无限长冲激响应 IIR )决定了结构上有不同的特点。2. 不同结构所需的存储单元及乘法次数不同,前者影响复杂性,后者影响运算速度。3. 有限精度(有限字长)实现情况下,不同运算结构的误差及稳定性不同。4. 好的滤波器结构应该易于控制滤波器性能,适合于模块化实现,便于时分复用。

二、数字滤波器的工作原理则:
是其付氏变换。是系统的输出,是其付氏变换。是系统的输入,设
)()()()(
jw
jw
eYnyeXnx
h(n)x(n) y(n)
作原理。这就是数字滤波器的工符合我们的要求,使滤波器输出选取
表示)后变成其系统性能用经过滤波器看出:输入序列的频谱
)()(),()()()((
)(
)]()([)()()( 1
jwjwjw
jwjwjw
jw
jwjw
m
eHeXeHeHeXeH
eX
eHeXFmxmnhny
则 LTI 系统的输出为:

三、数字滤波器表示方法• 有两 种表示方法:方框图表示法;流图表示法 .• 数字滤波器中 , 信号只有延时,乘以常数和相加三种运算。• 所以 DF 结构中有三个基本运算单元:加法器,单位延时,乘常数的乘法器。

1、方框图、流图表示法Z-1单位延时
系数乘
相加
Z-1
a
方框图表示法: 信号流图表示法:
a
把上述三个基本单元互联,可构成不同数字网络或运算结构,也有方框图表示法和流图表示法。

2. 例子)()2()1()( 021 nxbnyanyany
例:二阶数字滤波器:其方框图及流图结构如下:
Z-1
Z-1
x(n) y(n)b0
a1
a2
x(n) y(n)b0
a1
a2 Z-1
Z-1
看出:可通过流图或方框图看出系统的运算步骤和运算结构。以后我们用流图来分析数字滤波器结构。 DF 网络结构或 DF运算结构二个术语有微小的差别,但大抵一样,可以混用。

四、数字滤波器的分类• 滤波器的种类很多,分类方法也不同。• 1. 从功能上分;低、带、高、带阻。• 2. 从实现方法上分 :FIR、 IIR• 3. 从设计方法上来分: Chebyshev( 切比雪夫) ,Butterworth (巴特沃斯)• 4. 从处理信号分:经典滤波器、现代滤波器• 等等。

1 、经典滤波器• 假定输入信号 x(n) 中的有用成分和希望去除的成分,各自占有不同的频带。当 x(n) 经过一个线性系统(即滤波器)后即可将欲去除的成分有效地去除。但如果信号和噪声的频谱相互重叠,那么经典滤波器将无能为力。
|X(ejw)|
wwc
有用无用
wc
|H(ejw)| |Y(ejw)|
wwc

2. 现代滤波器 它主要研究内容是从含有噪声的数据记录(又称时间序列)中估计出信号的某些特征或信号本身。一旦信号被估计出,那么估计出的信号将比原信号会有高的信噪比。 现代滤波器把信号和噪声都视为随机信号,利用它们的统计特征(如自相关函数、功率谱等)导出一套最佳估值算法,然后用硬件或软件予以实现。 现代滤波器理论源于维纳在 40年代及其以后的工作,这一类滤波器的代表为:维纳滤波器,此外,还有卡尔曼滤波器、线性预测器、自适应滤波器。本课程主要讲经典滤波器,外带一点卡尔曼滤波器 .

3. 模拟滤波器和数字滤波器• 经典滤波器从功能上分又可分为:低通滤波器(LPAF/LPDF):Low pass analog filter带通滤波器 (BPAF/BPDF):Bandpass analog filter高通滤波器 (HPAF/HPDF):High pass analog filter带阻滤波器 (BSAF/BSDF):Bandstop analog filter• 即它们每一种又可分为:数字 (Digital) 和模拟 (Analog)滤波器。

4. 模拟滤波器的理想幅频特性c c
)( jH
c c
)( jH
cc
)( jH
)( jH
1c2c1c2c
LPAF
HPAF
BPAF
BSAF

5. 数字滤波器的理想幅频特性2 c
)( jweH
LPDF
HPDF
BPDF
BSDF
…….
2 3
…….
2
…….
…….
2
)( jweH
)( jweH
)( jweH

Analog filters and digital filters • Analog filters are cheap, fast, and have a large
dynamic range in both amplitude and frequency. Digital filters, in comparison, are vastly superior in the level of performance that can be achieved.
• With analog filters, the emphasis is on handling limitations of the electronics, such as the accuracy and stability of the resistors and capacitors.
• digital filters are so good that the performance of the filter is frequently ignored. The emphasis shifts to the limitations of the signals, and the theoretical issues regarding their processing

• linear filter has an impulse response, a stepresponse and a frequency response. Each of these responses contains complete information about the filter, but in a different form.
• The most straightforward way to implement a digital filter is by convolving the input signal with the digital filter's impulse response.
• another way to make digital filters, called recursion.

• Recursive filters:– using previously calculated values from the output,
besides points from the input.– Instead of using a filter kernel, recursive filters are
defined by a set of recursion coefficients.• recursive filters are also called Infinite Impulse
Response or IIR filters. In comparison, filters carried out by convolution are called Finite Impulse Response or FIR filters.

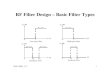
Time Domain Parameters
• Three parameters are important: • (1) transition speed (risetime), shown in (a)
and (b)• (2) overshoot, shown in (c) and (d), • (3) phase linearity (symmetry between the
top and bottom halves of the step), shown in (e) and (f).




Frequency domain filters

cutoff frequency
• The division between the passband and transition band is called the cutoff frequency.
• In analog filter design,the cutoff frequency is usually defined to be where the amplitude is reducedto 0.707 (i.e., -3dB). Digital filters are less standardized, and it is common to see 99%, 90%, 70.7%, and 50% amplitude levels defined to be
• the cutoff frequency.

Frequency Domain Parameters
• roll-off • ripple• stopband attenuation

A fast roll-off meansthat the transition band is very narrow.

Passband frequencies to move through the filter unaltered, there must be no passband ripple,

stopband attenuation






Moving Average Filters
• The moving average is the most common filter in DSP, mainly because it is the easiest digital filter to understand and use. In spite of its simplicity, the moving average filter is optimal for a common task: reducing random noise while retaining a sharp step response.

• the moving average is the worst filter for frequency domain encoded signals, with little ability to separate one band of frequencies from another. Relatives of the moving average filter include the Gaussian, Blackman, and multiplepass moving average.



Frequency Response


Recursive Implementation