Embed Size (px)
Citation preview

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
Поведенческая парадигма ИИ, групповое управление и самоорганизующиеся сети агентов
В.И. Городецкий (InfoWings Ltd.)[email protected]

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
Класс управляемых объектов – сеть распределенных
автономных сущностей различной природы (физических, виртуальных , социальных) обладающих встроенными коммуникационными и вычислительными возможностями.
Класс проблем управления – групповое управление сетью автономных сущностей решающих общие задачи.
Базовая архитектура программного обеспечения и технология реализации–сеть распределенных автономных агентов.
Потенциальные классы приложений– коллективная робототехника, Интернет вещей (IoT), кибер-физические системы (индустриальные приложения в производстве, менеджменте, социальной сфере, киберпространстве, науке).
Демонстрационный пример– автономное роботизированное сборочное производство.
О чем этот доклад?
В. Городецкий. Поведенческая парадигма ИИ, групповое управление и….. ВСПУ 2019, Москва

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
1. Введение: Групповое поведение и групповое управление: терминология и классификация
2. Две парадигмы ИИ: поведенческая парадигма vs парадигма на основе знаний (и области их предпочтительного использования)
3. Групповое поведение автономных сущностей – Базовые понятия:
Автономная сущность, групповая цель, групповое поведение, групповое управление, сценарий, протокол взаимодействия, ситуация, ситуационная осведомленность, синхронизация намерений, … , сценарные знания, сценарное обучение, … , враждебная среда, автономная миссия, распознавание намерений, … , накопление данных, онлайн автоматическое обучение, … поведению
4. Протоколы группового управление в сети автономных агентов (случай автономной роботизированной сборки)
5. Заключение: Что дальше в групповом управлении?
Содержание
В. Городецкий. Поведенческая парадигма ИИ, групповое управление и….. ВСПУ 2019, Москва

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
1. Введение: Групповое поведение и групповое управления: терминология и классификация

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
Группой называют две или более автономные сущности (физические, виртуальные, социальные), которые зависимы в некотором контексте.
Групповым поведением называют координированное индивидуальное поведение сущностей группы, направленные на достижение групповой цели.
Групповым управлением называют стратегию управления индивидуальными целями и поведением участников группы в интересах групповой цели.
Командой называют такую группу автономных сущностей, в которой индивидуальные цели и поведение участников полностью подчинены достижению групповой цели.
Что такое автономность? Она подразумевает, что формирование групповой цели и, возможно, ее декомпозиция в форме частично упорядоченного множества задач (действий), отвечающих способностям членов группы решать эти задачи, выполняется извне. Остальные задачи формирования и реализации группового управления решаются автономно, без вмешательства извне:
(1) распределение задач между членами группы, планирование и составление расписания исполнения задач сценария;(2) механизмы (протоколы) управления, обеспечивающие координацию и синхронизацию индивидуального поведения участников группы и 3) обработка исключительных ситуаций и ряд других (см. далее).
1. Введение: Терминология и рассматриваемые задачи
В. Городецкий. Поведенческая парадигма ИИ, групповое управление и….. ВСПУ 2019, Москва

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
Не рассматриваются: (1) супервизорное управление группой: в нем сущности не являютсяавтономными.(2) Управление в группах автономных объектов, члены которой связаны обязательствами типа альянсов (координируют поведение, если это не мешает достижению их собственных целей ) и коалиций (координируют поведение в ситуациях, когда им не обойтись друг без друга).
1. Введение: Задачи, которые не рассматриваются
В. Городецкий. Поведенческая парадигма ИИ, групповое управление и….. ВСПУ 2019, Москва
6

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
1. Введение: Классификация задач группового управления в автономных системах
В. Городецкий. Поведенческая парадигма ИИ, групповое управление и….. ВСПУ 2019, Москва
Групповое управление в
автономных системах
ЦентрализованноеГибкое
централизованное
Автономная
миссияРаспределенное
Имеется лидер, реализующий
централизованное управление группой и
динамическое перераспределение задач сценария на
множестве сущностей группы
+ Лидер команды может периодически
меняться, динамическое
перераспределение задач сценария на
множестве сущностей группы
Управление выполняется на
основании парныхвзаимодействий и самоорганизации,
перераспределение задач сценария на
множестве сущностей группы
+ Возможно динамическое
создание и изменение сценария достижения
цели с использованием сценарных знаний,
Автономная
миссия с
самообучением
Частично упорядоченное множество
действий сценария может быть задано
или строится автономно
Централизованное

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
Подзадачи автономного группового управления
Общая технология решения задачи группового управления в простейшем случае
Входные данные:— Данные о групповой цели
автономных объектов,— Список действий сценария
и ограничения. Поиск потенциальных исполнителей
Распределение действий сценария
Протокол общих намерений:
подтверждение обязательств и
соглашений
Рассылка информации, нужной для
обеспечения ситуационной
осведомленности
Исполнение сценария и групповое
управление его исполнением
Завершение исполнения
сценария
Результаты группового поведения
Исполнение сценария и групповое
управление его исполнением
Групповое управление – это только одна из задач (хотя и центральная) проблемы подготовки, формирования и реализации стратегии управления групповым поведением множества автономных распределенных объектов
В. Городецкий. Поведенческая парадигма ИИ, групповое управление и….. ВСПУ 2019, Москва

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
2. Две парадигмы ИИ: поведенческая парадигма vs парадигма на основе знаний

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
Парадигма ИИ, основанная на знаниях: в чем проблемы?
Системы искусственного интеллекта (ИИ) обычно называют также системами, основанными на знаниях, и это отражает тот факт, что базовой парадигмой ИИ была и остается парадигма ИИ на основе знаний. В ней знания о внешнем мире и о механизмах принятия решений представляются с помощью символьныхмоделей с явным представлением знаний или нейросетевых моделей с неявным их представлением.
Но оказывается, что с их помощью очень трудно, а иногда и невозможно описатьмногие очень простые модели, и решать относительно несложные задачи, которые не представляют трудностей ни для человека, ни для животных. К ним относятся многошаговые адаптивные стратегии поведения робота или группы роботов в среде с неопределенностью, например, движение робота или их группы в помещении неизвестной топологии при наличии препятствий (SLAM) . В настоящее время таких задач появилось очень много, и не только в групповой робототехнике.
Адаптивные сценарии группового поведения не представляют трудностей ни для человека, ни для животных (при добыче пищи или в коллективной борьбе за выживание). Среди людей яркие примеры подобного поведения дают спортивные игры, фигурное катание, которые реализуются за счет “мышечной памяти”.
В. Городецкий. Поведенческая парадигма ИИ, групповое управление и….. ВСПУ 2019, Москва

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
Сравнение эволюция ЕИ и развития ИИ
V. Gorodetsky. Self-organizing Network of Autonomous Agents …. FRUCT-22, May 16 2018В. Городецкий. Поведенческая парадигма ИИ, групповое управление и….. ВСПУ 2019, Москва
Gershenson C. Behavior-based Knowledge Systems: An Epigenetic Path from Behavior to Knowledge. // Proc. 2nd Workshop on Epigenetic Robotics, V. 94. Edinburgh, Scotland. 2002. P. 35–41. Доступно по ссылке http://arxiv.org/ftp/cs/papers/0206/0206027.pdf
Обобщение поведенческого опыта
особи в динамической среде и
обратной связи, получаемой от среды
Поведенческий опыт объекта в
среде и обратная связь от нее не
используются

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
Поведенческая модель Р. Брукса (R.A. Brooks)
Реактивная архитектура – это архитектура поведения интеллектуального агента без модели рассуждений. Она использует модель конечного автомата без внутреннего состояния для задания поведения системы (“паттернов поведения”) в зависимости от ситуации во внешней среде по правилу "ситуация–действие”. При этом используются многоуровневые структуры паттернов поведения, в ней верхним уровням соответствуют более высокие уровни абстракции паттернов.
Эта модель - первый пример модели ИИ на основе поведения -, оказалась очень слабой для описания современных моделей группового поведения:
Реактивный агент не использует модель внешней среды, и в реальных приложениях размер таблицы "ситуация–действие” оказывается очень большим, и при этом всегда будут возникать ситуации, которых нет в таблице.
Он не имеет внутреннего состояния, поэтому решения им принимаются только на основе текущей информации, и автомат не в состоянии принимать решение по информации, относящейся к разным моментам времени.
Невозможно предвидеть высокоуровневое поведения, управляя паттернами более низкого уровня и др.
В. Городецкий. Поведенческая парадигма ИИ, групповое управление и….. ВСПУ 2019, Москва
12

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
3. Групповое поведение автономных сущностей – Базовые понятия

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010V. Gorodetsky. Self-organizing Network of Autonomous Agents …. FRUCT-22, May 16 2018В. Городецкий. Поведенческая парадигма ИИ, групповое управление и….. ВСПУ 2019, Москва
Понятия поведенческой парадигмы демонстрируются на примере групповой работы трех автономных сборочных роботов с разными
способностями.

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
Демонстрационный пример: групповая работа сборочных роботов – постановка задачи
Сборка изделия выполняется тремя роботами 𝑹 = {𝑅1, 𝑅2, 𝑅3 }, которые располагаются вокруг сборочной платформы.
Имеется 5 типов сборочных единиц (СЕ), представленных множеством
𝑫 = {𝐷1, 𝐷2, 𝐷3 , 𝐷4 , 𝐷5},
которые используются для сборки целевого изделия, и при этом
𝑫(1)={𝐷1, 𝐷3, 𝐷4} – типы СЕ, с которыми может работать робот 𝑅1 ; 𝑫(2)={𝐷2, 𝐷3, 𝐷5 } – типы СЕ, с которыми может работать робот 𝑅2 ; 𝑫(3)={𝐷1, 𝐷2, 𝐷5} – типы СЕ, с которыми может работать робот 𝑅3 .
СЕ находятся в "корзинах", расположенных у сборочной платформы.Размещение СЕ по корзинам может быть разным, и каждый роботимеет доступ только к своей "корзине", но роботы могут передавать СЕиз доступных им корзин другим роботам, если каких−то нужных им СЕнет в их собственных корзинах, или запрашивать их со склада.
V. Gorodetsky. Self-organizing Network of Autonomous Agents …. FRUCT-22, May 16 2018В. Городецкий. Поведенческая парадигма ИИ, групповое управление и….. ВСПУ 2019, Москва

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
Поведение состоит из паттернов – структурированного множества действий. Паттерны могут задаваться рекурсивно - любое действие может быть детализировано
подстановкой паттерна поведения на его место.Сценарий группового поведения множества автономных сущностей – это паттерн поведения, в котором для всех его действий (операций сборки), структурированных отношением частичного порядка, указаны сущности (роботы) или их подмножества, которые эти операции выполняют, с возможной привязкой ко времени.
Пример: Пусть 𝒁 = {𝑍1, 𝑍2, … , 𝑍12} – множество уникальных идентификаторов СЕ, из которых состоит изделие (для операций сборки используем те же имена), а ограничения на порядок действий сценария сборки задан частично упорядоченным множеством𝑨 = 𝒁,> = {𝒁, {(𝑍8>𝑍4), (𝑍2>𝑍4),(𝑍2>𝑍7),(𝑍12>𝑍7), (𝑍6>𝑍7), (𝑍9>𝑍8), (𝑍10>𝑍2), (𝑍11>𝑍2),(𝑍3>𝑍12), (𝑍3>𝑍6), (𝑍1>𝑍3), (𝑍5>𝑍1), (𝑍5>𝑍11)}}
Операция подстановки паттерна поведения𝑺 𝑋𝑖 : 𝑺 𝑋𝑖 𝑋𝑖, где 𝑺 𝑋𝑖 – паттерн поведения, подставляемый на место символа действия 𝑋𝑖.
a. Сценарий группового поведения
V. Gorodetsky. Self-organizing Network of Autonomous Agents …. FRUCT-22, May 16 2018В. Городецкий. Поведенческая парадигма ИИ, групповое управление и….. ВСПУ 2019, Москва
Граф ограничений сценария действий

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
Граф ограничений сценария сборки изделия
V. Gorodetsky. Self-organizing Network of Autonomous Agents …. FRUCT-22, May 16 2018В. Городецкий. Поведенческая парадигма ИИ, групповое управление и….. ВСПУ 2019, Москва
Преобразование графа ограничений сценария действий в ярусно-параллельнуюформу с нумерацией работ, согласованной с заданным частичным порядком их выполнения в сценарии
Еще раз: Граф ограничений сценария описывает только ограничения на структурудействий.
18

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
Стратегии формирования сценария
1. Сценарий исполнения строится “от начала до конца”: каждому действию ставится в соответствие (1) исполнитель (робот-сборщик), способный выполнить это действие, и (2) временная привязка в диаграмме Ганта. Для построения используется тот или иной алгоритм распределения роботов, множество показателей качества и адекватный механизм многокритериального выбора.
2. Сценарий в его классическом понимании вообще не строится, а формируется в процессе выполнения сборки. При этом используется адаптивный алгоритм динамического назначения исполнителей в реальном времени, в котором на каждом шаге строится множество действий, которое допустимо выполнять. В итоге такого процесса реализуется некоторый сценарий выполнения сборки.
3. Между двумя описанными крайними случаями (детерминированная стратегия и стратегия, формируемая онлайн) существует бесконечное множество вариантов стратегий, которые представляют собой комбинации двух названных стратегий.
// 4. В случае автономное миссии сценарий выводится из постановки цели, данных о начальном состоянии автономных сущностей и внешней среды с использованием сценарной базы знаний, и он может адаптивно корректироваться онлайн при накоплении отклонений или при возникновении исключительных ситуаций.//
V. Gorodetsky. Self-organizing Network of Autonomous Agents …. FRUCT-22, May 16 2018В. Городецкий. Поведенческая парадигма ИИ, групповое управление и….. ВСПУ 2019, Москва

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
б. Ситуация и оценка ситуации
Ситуация
Содержательно ситуация в поведенческой модели системы группового управления есть ее характеристика, привязанная ко времени, описывающая то, что происходило, происходит и может происходить в этой системе в будущем.
Формально модель ситуации описывается множеством состояний автономных
объектов и отношений на них в некоторый момент времени 𝑡Î[𝑡0, 𝑡к]:
𝑺(𝑡) =< {𝑌𝑘|𝑘=1𝑁 }, 𝐸𝑟|𝑟=1
𝑀 , 𝑡Î[𝑡0, 𝑡к] >,
где {𝑌𝑘|𝑘=1𝑁 } – множество состояний автономных объектов {𝑋𝑘|𝑘=1
𝑁 } системы,
𝐸𝑟|𝑟=1𝑀 – множество отношений на множестве этих объектов,
Оценка ситуации Качественные и/или количественные обобщенные оценки прошлого, текущего и будущего процессов в системе с той или иной точки зрения называются оценками ситуации. Например, с позиций достижимости цели ситуации оцениваются в шкале из четырех значений: (1) “цель достижима”, (2) “цель недостижима”, (3) “цель перестала быть актуальной” и (4) “цель достигнута”. Еще пример – нормальная или исключительная ситуация, нештатная ситуация. Оценка ситуации касается ее определенного (конкретного) аспекта.
V. Gorodetsky. Self-organizing Network of Autonomous Agents …. FRUCT-22, May 16 2018В. Городецкий. Поведенческая парадигма ИИ, групповое управление и….. ВСПУ 2019, Москва

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
Статическая и динамическая модели действий сценария
Граф ограничений сценария действий, по существу, является начальным состоянием структуры знаний о сценарии.
В динамике, когда роботы приступили к исполнению сценария, все действия этой структуры (графа ограничений сценария действий) будут принадлежать к одной из трех категорий: — действия, которые уже исполнены, — действия, которые находятся в процессе исполнения, и — действия, исполнение которых еще не начато.
Информация о том, каков состав каждого из этих трех множеств, является одной из важнейших характеристик ситуации.
Для описания динамики состава этих множеств в структуре знаний о состоянии текущей модели действий расширим граф ограничений сценария действий таким образом, чтобы в нем отражалась текущая динамика исполнения сценария.
V. Gorodetsky. Self-organizing Network of Autonomous Agents …. FRUCT-22, May 16 2018В. Городецкий. Поведенческая парадигма ИИ, групповое управление и….. ВСПУ 2019, Москва
выполнено
в процессе

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
От графа ограничений сценария действий к ситуационному графу сценария действий
В графе ограничений сценария для каждого действия 𝑋𝑖 введем дополнительно узел 𝐹𝑗,
который следует за этим действием, и называется “статусом предшествующего действия”( СПД-узлом). Он имеет атрибут с именем “СПД”, который принимает два значения, а именно “действие не выполнено” и “действие выполнено”.
Выделение действий, которые находятся в процессе исполнения, возложим на роботов(об этом далее).
V. Gorodetsky. Self-organizing Network of Autonomous Agents …. FRUCT-22, May 16 2018В. Городецкий. Поведенческая парадигма ИИ, групповое управление и….. ВСПУ 2019, Москва
В ситуационном графе сценария выделяются начальное состояние как состояние, которое соединяется дугами со всеми вершинами без предшественников ( с начальными вершинами графа сценария), и конечное состояние, в которое входят дуги из всех действий, не имеющих последователей в графе сценария.

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
Формальная модель ситуации на примере сборочного процесса
V. Gorodetsky. Self-organizing Network of Autonomous Agents …. FRUCT-22, May 16 2018В. Городецкий. Поведенческая парадигма ИИ, групповое управление и….. ВСПУ 2019, Москва
В формировании модели ситуации участвуют— ситуационный граф действий сценария, — роботы, назначенные на исполнения работ, и— содержание корзин роботов с СЕ. Вторая группа компонент модели ситуации – это множество отношений на парах <робот, узел
ситуационного графасценария>, <робот,робот>, <робот, корзинас СЕ>, а также все отношения, заданные напарах узлов ситуационного графасценария. Кроме того, ситуацияхарактеризуется внутренними состояниями этихсущностей.
Структура знаний о действиях сценария

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
Модель ситуации – множество агентов системы группового управления: Классы агентов
1. Агент действия – класс программных агентов, представляющих в мире программ системы группового управления узлы-действия ситуационного графа действий сценария;
2. Агент СПД-узла – класс агентов, представляющих в мире программ системы СПД-узлы ситуационного графа сценария;
3. Агент робота – класс агентов, представляющих в мире программ системы роботов, принимающих участие в процессе групповой сборки.
4. Агент-лидер – это может быть как роль, назначенная отдельному агенту, так и роль, расширяющая функциональность класса агентов робота.
Основная функция роли – это мониторинг ситуации в системе группового управления и организация информационного обмена, реализующего стратегию обеспечения ситуационной осведомленности агентов роботов-сборщиков.
V. Gorodetsky. Self-organizing Network of Autonomous Agents …. FRUCT-22, May 16 2018В. Городецкий. Поведенческая парадигма ИИ, групповое управление и….. ВСПУ 2019, Москва
Модель ситуации- это модель объекта управления, а управлениеситуацией – это групповое управление

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
Для каждого Агента СПД-узла 𝐹𝑘 введем атрибут “Статус СПД-узла” Î {действие не выполнено, действие выполнено}.
Для каждого действия 𝑋𝑗 введем два
атрибута:
1. “Предусловие действия 𝑋𝑗”Î{“предуслов
ие действия выполнено” “предусловиедействие не выполнено” причем первое значение он принимает тогда и только тогда, когда состояния всех его предшественников - СПД-узлов 𝐹𝑟 имеют значение атрибута “Статус СПД”= “действие выполнено”.
2. “Статус действия”Î {“исполнение не начато”, “исполняется”, “исполнено”}
Агент узла “Действие 𝑋𝑗”
Агент СПД-узла
𝐹𝑘
….
Предусловие
Исключительная ситуация
”Статус СПД-узла” (статус предшествующего
действия)
Внутреннее состояние Агента:<” Статус предусловия”,
“Статус действия”>
Постусловие
От робота 𝑅𝑖
К роботу 𝑅𝑖
Агенты и атрибуты внутреннего состояния узлов ситуационного графа сценария и их взаимодействие
V. Gorodetsky. Self-organizing Network of Autonomous Agents …. FRUCT-22, May 16 2018В. Городецкий. Поведенческая парадигма ИИ, групповое управление и….. ВСПУ 2019, Москва
Агент действия 𝑋𝑗 взаимодействует с предшествующим и последующим СПД-узлами и
с роботом, который это действие назначен исполнять. Агент СПД-узла взаимодействует с предшествующим ему действием и с последующими действиями ситуационного графа.
25

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
Агенты и атрибуты множестве сборочных роботов и корзин с СЕ, а также отношения на их парах
V. Gorodetsky. Self-organizing Network of Autonomous Agents …. FRUCT-22, May 16 2018В. Городецкий. Поведенческая парадигма ИИ, групповое управление и….. ВСПУ 2019, Москва
Агент робота 𝑅1
Внутреннее состояние агента
“Статус исправности”“Текущий статус работы”
Агент корзины с СЕ 𝐷1
Внутреннее состояние агента
“Список СЕ”
Агент робота 𝑅2
Внутреннее состояние агента
“Статус исправности”“Текущий статус работы”
Агент робота 𝑅3
Внутреннее состояние агента
“Статус исправности”“Текущий статус работы”
Агент корзины с СЕ 𝐷3
Внутреннее состояние агента
“Список СЕ”
Агент корзины с СЕ 𝐷2
Внутреннее состояние агента
“Список СЕ”
Модель ситуации в системе группового управления роботами сборочного процесса описывается внутренними состояниями сущностей процесса групповой сборки, т.е.
— (агентов) всех действий;— (агентов) всех СПД-узлов;— (агентов) всех роботов;— (агентов) всех корзин с СЕ, а также — структурой на множестве выполненных,
выполняемых и еще не начатых работ;— назначениями роботов на работы сценария и — содержанием корзин с СЕ.

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
в. Ситуационная осведомленность агента в групповом управлении
Понятие “ситуационная осведомленность” агента характеризует минимальныйуровень информации о текущей ситуации, которым должен обладать агент распределённой системы (системы группового управления), чтобы выполнять свои индивидуальные действия в соответствии с принятым сценарием и в соответствиис обязательствами и соглашениями, возложенными на агента (по протоколу общих намерений).
В условиях ситуационной осведомленности каждый агент владеет какой-то частью информации о прошлой, текущей и будущей ситуации в системе, а также о своей роли в сценарии группового поведения, которая позволяет ему однозначно определять свое очередное действие и время, когда он должен начинать его исполнение.
В рассматриваемом приложении активными объектами-исполнителями процесса сборки являются роботы, и речь идет об их ситуационной осведомленности. Остальные сущности являются хранителями текущих данных и знаний.
Минимальный объем информации для обеспечения ситуационной осведомленности зависит от архитектуры системы группового управления.
V. Gorodetsky. Self-organizing Network of Autonomous Agents …. FRUCT-22, May 16 2018В. Городецкий. Поведенческая парадигма ИИ, групповое управление и….. ВСПУ 2019, Москва

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
Ситуационная осведомленности при использовании централизованной архитектуры
Агент-лидер должен знать:
Сценарий сборки (список действий и частичный порядок на них, распределение функций сборки между роботами;
Текущую ситуацию в системе сборки в целом, в частности, действия, которые исполнены, действия, выполняемые в текущий момент (эта информация формируется на основе мониторинга процесса исполнения сценария).
Ситуационная осведомленность роботов –сборщиков обеспечивается такой информацией:
1. Все роботы-сборщики должны знать сценарий и свои действия в нем.
2. В процессе исполнения сценария агент робота должен знать, какие действия выполняются в текущий момент, и какие агенты это делают.
Ситуационная осведомленность агентов роботов поддерживается с помощью специальных протоколов, организующий информационный обмен между участниками групповой работы.
V. Gorodetsky. Self-organizing Network of Autonomous Agents …. FRUCT-22, May 16 2018В. Городецкий. Поведенческая парадигма ИИ, групповое управление и….. ВСПУ 2019, Москва

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
4. Протоколы группового управление в сети автономных агентов (случай автономной роботизированной сборки)

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
Жизненный цикл робота при исполнении действий и важные временные соотношения
V. Gorodetsky. Self-organizing Network of Autonomous Agents …. FRUCT-22, May 16 2018В. Городецкий. Поведенческая парадигма ИИ, групповое управление и….. ВСПУ 2019, Москва
1р – 2р: робот начал и закончил исполнять предыдущее действие
2р – 3р: робот начал и закончил поиск СЕ, нужной для выполнения текущего действия
3р – 4р: робот нашел СЕ и ожидает готовности текущего действия к исполнению
4р – 5р: робот начал и закончил выполнять текущее действие
5д – вариант позиционирования времени готовности последующего действия
1д
2д
3д
4д
5д
Робот
Агент действия
Жизненный цикл робота
Текущее действие готово к исполнению, ждет готовности робота
Текущее действие не готово к исполнению
Робот ждет, если готов
2р 3р 4р 5р1р Ось времени
Работа с предыдущим действием
Работа с текущим действием
Работа со следующим действием
31

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
Основные протоколы взаимодействия в процессе групповой роботизированной сборки
V. Gorodetsky. Self-organizing Network of Autonomous Agents …. FRUCT-22, May 16 2018В. Городецкий. Поведенческая парадигма ИИ, групповое управление и….. ВСПУ 2019, Москва
Робот
Жизненный цикл робота
2р 3р 4р 5р1р
Робот исполняетпредыдущее действие
Работа с последующимдействием
Протокол 1: Поиск и захват СЕ.Протокол 2: Робот ожидает готовности действия и исполняет его.
Протокол 2: Робот ожидает готовности
действия или действие ожидает робота
Агент действия ожидает
освобождения робота
Агент робота ожидаетготовности действия, если оно
не готово к исполнению, иначесразу начинает его исполнять
Робот исполняет действие
Протокол 1: Робот в поиске
нужной СЕ Протокол 2: Робот исполняет текущее
действие

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
Протокол 2:“Робот ожидает готовности действия и исполняет его”
V. Gorodetsky. Self-organizing Network of Autonomous Agents …. FRUCT-22, May 16 2018В. Городецкий. Поведенческая парадигма ИИ, групповое управление и….. ВСПУ 2019, Москва
Начальное состояние: (1) нужная СЕ в захвате робота 𝑅𝑖. (2) предусловие действия 𝑋𝑗 (очередного для робота 𝑅𝑖 ) выполнены/не выполнены, (3) робот 𝑅𝑖 свободен, и может выполнять действие.
Инициатор протокола: Агент робота 𝑅𝑖 .Участники протокола: Агент действия 𝑋𝑗, Агент СПД-узла 𝐹𝑘 , следующего за 𝑋𝑗, Агент лидера.
Агент робота 𝑅1
Агент действия 𝑋𝑗
Агент СПД-узла 𝐹𝑘
Агент робота-лидера
СЕ в захвате (Проактивное событие)
Начато исполнение действия
Действие исполнено
Действие исполнено
Превышен таймаут, ИС
Агентам узлов-действий –последователям СПД-узла 𝐹𝑘
Событие, инициирующее протокол
Событие, закачивающее протокол
Запрос о состоянии готовности действия
Действие готово к исполнению
Действие готово к исполнению
(Проактивноесобытие)
Действие исполнено

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
Поведение агента робота в протоколе 2 “Робот ожидает готовности действия и исполняет его”
Таблица переходов состояний Агента робота 𝑅𝑖 в протоколе 2
V. Gorodetsky. Self-organizing Network of Autonomous Agents …. FRUCT-22, May 16 2018В. Городецкий. Поведенческая парадигма ИИ, групповое управление и….. ВСПУ 2019, Москва
Внутреннее
состояние
Агента
робота 𝑅𝑖
Проактивное событие
робота 𝑅𝑖 ,
инициирующее
протокол
“СЕ в захвате робота”
От Агента действия 𝑋𝑗“Действие готово к
исполнению”
Проактивное
событие робота 𝑅𝑖“Действие 𝑋𝑗
исполнено"
Cобытие от Агента
действия 𝑋𝑗" Превышен
таймаут"
Начальное
состояние:
<свободен,
исправен>
<занят,
исправен>
##
<занят,
исправен>
<свободен, исправен>
#
<свободен,
неисправен>
<занят,
неисправен>

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
Поведение агента робота в протоколе 2 “Робот ожидает готовности действия и исполняет его”
Таблица выходных событий Агента робота 𝑅𝑖 в протоколе 2
V. Gorodetsky. Self-organizing Network of Autonomous Agents …. FRUCT-22, May 16 2018В. Городецкий. Поведенческая парадигма ИИ, групповое управление и….. ВСПУ 2019, Москва
Внутреннее
состояние
Агента
робота 𝑅𝑖
Проактивное событие
робота 𝑅𝑖 ,
инициирующее протокол:
“СЕ в захвате робота”
От Агента действия 𝑋𝑗
“Действие готово к исполнению”
Проактивное
событие
“Действие 𝑋𝑗исполнено"
Cобытие от Агента
действия 𝑋𝑗" Превышен
таймаут"
Начальное
состояние:
<свободен,
исправен>
Запрос Агенту действия 𝑋𝑗 о готовности с
ожиданием сообщения о готовности
Агенту действия 𝑋𝑗
“ Начато исполнение действия”
# #
<занят,
исправен>
Агенту 𝑋𝑗:“Действие 𝑋𝑗
исполнено"
#
<свободен,
неисправен>
<занят,
неисправен>

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
Поведение агента действия в протоколе 2 “Робот ожидает готовности действия и исполняет его”
Таблица переходов состояний Агента действия 𝑋𝑗 в протоколе
“Взять СЕ и выполнить действие”
V. Gorodetsky. Self-organizing Network of Autonomous Agents …. FRUCT-22, May 16 2018В. Городецкий. Поведенческая парадигма ИИ, групповое управление и….. ВСПУ 2019, Москва
Таблица переходов состояний Агента действия 𝑋𝑗 в протоколе 2
Внутреннее
состояние Агента
действия 𝑋𝑗
От Агента робота 𝑅𝑖“Запрос о
готовности действия …”
Проактивноесобытие:
“Действие готово к
исполнению”
От Агента робота 𝑅𝑖:
“Начато исполнение
действия 𝑋𝑗”
От Агента
робота 𝑅𝑖:
“Действие 𝑋𝑗исполнено"
Проактивное
событие
" Превышен
таймаут"
Начальное состояние
<предусловие не
выполнено, действие не
начато >
#
<предусловие выполнено, действие не
начато >
# # #
<предусловие не выпол-
нено, … исполнется># # # #
<предусловие не выпол-
нено, … исполнено>
Начальное состояние <предусловие выполнено,
действие не начато>#
<предусловие выполнено, действие
исполняется>
<предусловие выполнено,
действие исполняется>
<предусловие
выполнено,
действие
исполнено>
<предусловие выполнено
действие исполнено>

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
Таблица выходных событий Агента действия 𝑋𝑗 в протоколе 2
Поведение агента действия в протоколе 2“Робот ожидает готовности действия и исполняет его”
V. Gorodetsky. Self-organizing Network of Autonomous Agents …. FRUCT-22, May 16 2018В. Городецкий. Поведенческая парадигма ИИ, групповое управление и….. ВСПУ 2019, Москва
Внутреннее
состояние Агента
действия 𝑋𝑗
От Агента робота 𝑅𝑖“Запрос о
готовности действия …”
Проактивноесобытие:
“Действие готово к исполнению”
От Агента робота 𝑅𝑖:
“Начато исполнение действия
𝑋𝑗”
От Агента
робота 𝑅𝑖:
“Действие 𝑋𝑗исполнено"
Проактивное
событие
" Превышен
таймаут"
Начальное состояние <предусловие не
выполнено, действие не начато >
#Агенту 𝑅𝑖:
“Действие готово к исполнению”
## #
<предусловие не выполнено, действие
исполняется>
## # #
<предусловие не выполнено действие
исполнено>
Начальное состояние <предусловие выполнено,
действие не начато >
Агенту 𝑅𝑖:
“Действие готово к
исполнению”
<предусловие выполнено, действие исполняется>
Агенту СПД-
узла 𝐹𝑘 :
“Действие
выполнено”
Агенту
лидера:
" Превышен
таймаут"
37

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
Поведение агента СПД-узла и агента лидера в протоколе 2 “Робот ожидает готовности действия и исполняет его”
Таблицы переходов состояний и выходных событий Агента СПД-узла 𝐹𝑘 в протоколе 2
V. Gorodetsky. Self-organizing Network of Autonomous Agents …. FRUCT-22, May 16 2018В. Городецкий. Поведенческая парадигма ИИ, групповое управление и….. ВСПУ 2019, Москва
Внутреннее
состояние Агента
СПД-узла 𝐹𝑘
От агента робота
“Действие 𝑋𝑗исполнено"
Начальное состояние : <действие не выполнено>
<действие
выполнено>
<действие выполнено>
#
Внутреннее
состояние Агента
СПД-узла 𝐹𝑘
От агента робота
“Действие 𝑋𝑗 исполнено"
Начальное состояние :
<действие не
выполнено>
Агентам узлов-действий –последователям СПД-узла 𝐹𝑘
“Действие 𝑋𝑗 исполнено"
<действие исполнено> #
Таблица переходов состояний агента-лидера в протоколе 2
Внутреннее
состояние Агента лидера
Входное событие:
“ИС: Превышен таймаут
исполнения действия 𝑋𝑗"
Начальное состояние :
<Нормальное состояние>
<Исключительная ситуация>
<Исключительная ситуация> <Исключительная ситуация>

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
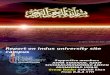
Особенности протокола 1: “Поиск и захват СЕ”
V. Gorodetsky. Self-organizing Network of Autonomous Agents …. FRUCT-22, May 16 2018V. Gorodetsky. Network of Autonomous Agents for Emergent Applications… Prague 05-03-2019В. Городецкий. Поведенческая парадигма ИИ, групповое управление и….. ВСПУ 2019, Москва
Варианты реализации протокола 1
(1) Нужная СЕ имеется в корзине робота 𝑅𝑖 , и он берет ее в захват, тратя на это время 1; //время операции 1//
Иначе,
(2) когда в собственной корзине нужной СЕ нет, он запрашивает о ее наличии у двух других роботов и на складе (через Агента лидера), а также о времени, когда эта СЕ может быть доставлена каждым из адресатов.
После получения ответов от запрошенных агентов робот 𝑅𝑖 принимает решение по правилу:
∆= 𝑎𝑟𝑔𝑚𝑖𝑛 ∆𝑅2, ∆𝑅3, ∆𝑊 ,
где ∆𝑅2, ∆𝑅3 - времена доставки запрошенной СЕ от других роботов, а ∆𝑊 - время
ее доставки со склада.
По существу, Протокол 1 есть Протокол контрактных сетей, для которого имеется стандартная реализация FIPA. Этот протокол также
реализуется с помощью сети взаимодействующих конечных автоматов с внутренними состояниями.

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
Протокол 1:“Поиск и помещение в захват нужной СЕ”
V. Gorodetsky. Self-organizing Network of Autonomous Agents …. FRUCT-22, May 16 2018В. Городецкий. Поведенческая парадигма ИИ, групповое управление и….. ВСПУ 2019, Москва
Начальное состояние: Робот 𝑅𝑖 свободен от выполнения предыдущего действия, исправен и должен подготовиться к выполнению следующего действия. Для этой подготовки он должен найти и взять в захват необходимую СЕ. Это выполняется под управлением Протокола 1 “Поиск и помещение в захват нужной СЕ”.Инициатор Протокола 1: Агент робота 𝑅1 .Участники Протокола 1: Агенты других роботов 𝑅2, 𝑅3 , Aагенты всех корзин и Агент лидера.
Агент робота 𝑅3
Агент лидера
Агент робота 𝑅1
Агент робота 𝑅2
Агент корзины 𝐷3
Агенткорзины 𝐷1
Агенткорзины 𝐷2
Запрос на СЕ
СЕ доставлена
Проактивноесобытие,
инициализирующее Протокол 1
Case 1: The necessary AU is obtained in the own basket of the robot
СЕ отсутствует
Запрос на время доставки СЕ от роботов 𝑅2 и 𝑅3 и со склада
Случай 1: Нужная СЕ имеется в собственной корзине робота 𝑅1
Времена доставки СЕ ∆𝑅2, ∆𝑅3, ∆𝑊 от роботов 𝑅2 , 𝑅3 и со склада
Запрос на доставку СЕ от робота 𝑅2
Запрошенная СЕ доставлена от робота 𝑅2
Проактивноесобытин,
завершающее Протокол 1
Случай 2: Нужная СЕ отсутствует в собственной корзине робота 𝑅1
Протокол
контрактных сетей
40

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
Изменится модель внутреннего поведения агентов разных ролей, но не изменятся модели внешнего поведения системы группового управления, а именно модели протоколов и их формальные описания в виде конечных автоматов с внутренними состояниями.
Несколько вопросов
V. Gorodetsky. Self-organizing Network of Autonomous Agents …. FRUCT-22, May 16 2018V. Gorodetsky. Network of Autonomous Agents for Emergent Applications… Prague 05-03-2019В. Городецкий. Поведенческая парадигма ИИ, групповое управление и….. ВСПУ 2019, Москва
А что изменится в алгоритме группового управления, если
1. Число роботов будет равно не трем, а другому конечному числу?
2. Если будем говорить не о роботизированной сборке, а, например, о
—Групповом управлении агентами в виртуальном пространстве при распределенной атаке на компьютерную сеть?
—Групповом управлении распределенным бизнес-процессом в виртуальном предприятии или в B2B-сети предприятий?
—Групповом управлении распределенной разработкой сложного проекта?

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
5. Заключение

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
Заключение
V. Gorodetsky. Self-organizing Network of Autonomous Agents …. FRUCT-22, May 16 2018V. Gorodetsky. Network of Autonomous Agents for Emergent Applications… Prague 05-03-2019В. Городецкий. Поведенческая парадигма ИИ, групповое управление и….. ВСПУ 2019, Москва
1. Поведенческая парадигма ИИ, обновленная и обогащенная в соответствии с требованиями новейших сетевых приложений, становится в настоящее время востребованной и формирует один из трендов современных ИТ- технологий.
2. Современная поведенческая парадигма ИИ предлагает эффективные модели спецификации автономного группового поведения и распределенного группового управления, которые дают возможность построения системгруппового управления на основе знаний.
3. В работе введена только небольшая часть базовых понятий предметно-независимой онтологии поведенческих систем, которые необходимо использовать для построения абстрактной модели (reference model) онтологии поведенческих систем.
Дальнейшее развитие множества понятий этой важной абстрактной модели поведенческой онтологии может быть получено анализом более сложных постановок и моделей задач автономного управления групповым поведением и использования более совершенных моделей и механизмов управления.

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
Ландшафт современных ИТ-моделей, парадигм и технологий управления за последний десяток лет меняется очень быстро. Тем не менее, можно попытаться кое-что в этой области спрогнозировать на ближайшие отрезки времени
Что дальше?
В. Городецкий. Поведенческая парадигма ИИ, групповое управление и….. ВСПУ 2019, Москва
(2010 – 2021 +)IoT, кибер-физические системы, Интернет Агентов, Цифровые инфраструкуры парадигмы, математические модели и технологии реализации индустриальных приложений автономных централизованных и адаптивных систем группового управления (см. данный доклад).
Автономное групповое управление
Автономные миссии с самообучением
+ к предыдущему: Интернет роботов, Экосистемы умных сервисов, Отдельные экосистемы данных, Сценарные знания и базы знаний Распределенное p2p групповое управление, включение принципов самоорганизации, автономные миссии с динамическим распределением задач на множестве членов группы, обработка
исключительных ситуаций.
(2017 – 2025 +)+ к предыдущему:
Интеллектуальные экосистемы данных, Фоновое машинное обучение групповому поведению по накопленным данным, Обучение сценарных баз знаний Автоматическое формирование сценариев в реальном времени, Самоорганизация группового управления, динамическое перераспределение задач, обработка исключительных и эмерджентных ситуаций
Централизован ное управление
Гибкое централизован ное управление
Автономная миссия
Распределенное управление
(2015 – 2023 +)

В.Городецкий, Р.Юсупов. Коллективное поведение… Санкт-Петербург, октябрь 2010
СПАСИБО!
Контакты: [email protected]
Вопросы ?
Источник: Richard Benjamins http://www.slideshare.net/EUDataForum/
edf2013-richard-benjamins-big-data-big-opportunities-big-risks-and-what-about-europe
Спасибо!
Дякую
Děkuji !