Embed Size (px)
Citation preview
로봇분야국제표준화 추진현황
- after Kyoto -
ISO TC 299 WG 1, WG 2, WG 3, WG 4, WG 6
JWG 35, JWG 36
2018. 07.
- 1 -
ISO TC 299 (Robotics)
TC 299 Plenary Meeting
TC 승격 후 2번째 회의
이번 총회는 TC로 승격되고 나서 2번째 총회로서, TC 299 내에서의 표준 개발을 어
떻게 하는 것이 효율적인지를 조정하는 것에 대한 중요한 논의가 있었음
이와 관련하여 지난 총회에서 의결된 SG 1(Gaps and overlaps)의 활동을 연장하기로
결정하되 구체적으로 다음과 같은 활동을 주문함
SG 1 의 Scope 및 Task
- Clarify distinction between industrial and service robots once and for all time.- We need change. Doing nothing is not an option.- Create a questionnaire by September 1, 2018, which will then be sent by the
ISO/TC 299 secretariat to all member countries. Responses from countries due December 15th, 2018.
• Call for country proposals on new architecture of standards and structure of working groups, which will then be evaluated by SG 1.
• Ask for stakeholder requirements (with regards to business cases defined in ISO/TC 299 business plan); stakeholder = users of the standards (current + new/future)
- SG 1 Deliverable: To present (a limited number of) of proposal(s), based on responses to the questionnaire, to ISO/TC 299, by end of July 2019.
- Ballot to ISO/TC 299 September to December 2019, to agree on one proposal.- 1st quarter 2020 for SG 1 to propose an implementation plan for the next
Plenary in 2020.
WG 2와 WG 4의 그룹 title을 변경하는 문제, TC 199, AAL(Active Assisted Living),
SMCC(Smart Manufacturing Coordination Committee) 에 대한 협력방안을 논의
덴마크가 제안한 산업용로봇 관련 3개의 NP 초안에 대하여서는 Draft가 없으므로,
Draft를 가지고 제안할 것을 권고함
CAG (Chair’s Advisory Group)
위원장과 컨비너간에 이번 총회에서 논의될 주요 의제와 관련하여 의견을 조율함
다만, 스웨덴의 의장과 간사가 경험이 많지 않아서, 주요 결정을 CAG 회의에서 하
지 못하고 총회에서 논의함(예, WG scope 조정)
- 2 -
WG 1 (Vocabulary and characteristics)
※ WG 1 은 주로 모든 로봇표준 분과에 공통으로 해당하는 용어 및 특성에
대한 표준을 개발하고 있으며, 용어는 모든 문서에서 공통으로 사용되기에
WG 1 에서 논의하여 정의함
현재 WG1은 2017년 6월에 결의된 ISO 8373 Robots and robotic devices — Vocabulary의 개정은 2018년 상반기까지 작업중
이는 ISO 규정에 따른 5년 주기의 시스템적 검토(Systematic review)를 통한 개정 작업
이며 현 ISO 8373:2012는 2012년 개정되어 국제적으로 로봇의 기본 정의로 활용되어
왔으며 IFR(International Federation of Robotics), IEEE 등을 포함한 대부분의 단체에서
이 용어와 정의를 기준으로 관련 연구와 작업을 수행해 오고 있는 것으로 보고됨
그러나, 새로운 형태의 로봇과 산업이 출현하면서 기존의 정의와 일부 상충되는 내
용에 대한 해결을 각 WG에서 요청하고 있는 상황이라 이에 대한 논의가 ISO 8373
의 개정으로 처리되어야 할 필요가 있음
이 개정에 대해서는 2017년 6월 7일 회원국들의 투표를 통하여 개정하는 것으로 확정
개정을 위한 작업으로 2017년 하반기 동안은 의료용 로봇 분과인 JWG5(Medical
robot safety - Joint working group JWG35 & JWG36 with IEC TC62/SC62A)과의 연
계 회의를 통하여 기본 로봇 정의와 자율(Autonomy) 및 자율성(Degree of
Autonomy)의 서비스로봇과 의료로봇 간의 상충에 대한 의견 수렴을 거쳐 ISO 8373
의 기본 정의인 로봇, 서비스 로봇, 로봇장치 및 자율에 대한 정의를 조율함
2018년 2월의 미국 NIST 회의 및 5월의 교토 분과회의에서는 산업용 로봇 분과인
WG3(Industrial safety)와 연계 회의를 거쳐 기본정의를 조율하였고 WG3의 의견 피
드백에 따라 ISO 8373의 개정 CD(Committee Draft) 안을 위한 기본정의를 확정
작업 그룹간의 조율로 확정된 기본정의들은 2018년 6월 교토에서 연속하여 개최된
Plenary 회의에 아래와 같이 공식적으로 보고되었으며 이는 시스템 개정의 CD로 제
안될 예정
- 3 -
robot
programmed actuated mechanism with a degree of autonomy to perform locomotion, manipulation or positioning NOTE A robot includes the control system and interface of the control
system.
autonomy
ability to perform intended tasks based on current state and sensing, without human intervention NOTE For a particular application, degree of autonomy can be evaluated
according to the quality of decision making and independence from human. For example, metrics for degree of autonomy exists for medical electrical equipment in IEC/TR 60601-4-1.
robotic technology
practical application knowledge to design, develop, and utilize robot
그동안 TC 299내 용어 일치를 위하여 개별 분과와의 공동작업을 통하여
기본 정의인 robot의 정의를 작업함
2017년 10월 수조우 회의에서부터 시작된 robot 정의의 개정은 2018. 5월 교토회의
를 마지막으로 WG2(Personal care robot safety), WG3, WG4(Service robots),
WG6(Modularity for service robots) 그리고 JWG5의 모든 분과로부터 취합된 의견을
참조하여 수정되었으며 최종 논의를 거쳐 상기와 같이 정의를 확정하여 개정안으로
제출될 예정임
그 중에서도 robotic technology에 대한 정의는 IEC ACART에서 제안한 포괄적인 정
의로 인해 논의가 촉발되었으며, ISO와 IEC 간의 용어 일치를 위해 그 동안 논의됨
그러나 IEC와 같은 포괄적인 정의는 ISO내 다른 TC와의 중복성 및 역할과 관련하여
논란 사항이 예견되기 때문에 상기와 같은 사전적인 의미가 최종 결정 사항이 됨
이 robotic technology는 수차례의 논의를 통하여 상기와 같이 정의하되 사전적 정의
이외의 특별한 기술적 정의가 없으므로 ISO 8373에서는 삭제하기로 논의함
또한 그동안 WG1에서는 WG3 분과에 타 분과와의 부합화를 위하여 industrial robot
과 industrial manipulator의 정의를 상기 상호 협의된 robot 정의에 기반하여 정의해
주기를 요청하였고 또한 수차례의 WG3와의 공동회의를 통하여 TC내 용어 부합화
를 추진함
그러나 당사자인 WG3는 분과 자체의 문제와 오랜 기간 정의된 관습을 일시에 변경
- 4 -
할 수 없다는 사유로 기존의 industrial robot 정의를 계속 사용하는 것으로 결의하여
이에 대한 사항을 WG1으로 통보한 바 있음
그동안 논란이 되어왔던 자율성 지수(level of autonomy)에 대한 정의는 지수에 대한
명확한 규정이 되어 있지 않기 때문에 ISO 8373 개정 제안에 포함하지 않기로 결정
다만 차기 작업으로 자율성 지수(Level of autonomy)에 대한 정의와 규정을 심도있게
논의하기로 하였으며, 이는 각 분과별 대상 로봇에 대한 활용도 고려하여야 하는 것으
로 확인
현재 WG1은 그동안의 논의사항에 입각하여 ISO 8373의 개정안 CD 안을 준비 중이
고 이 ISO 8373 개정 CD에 있어서 기본 정의 및 특성에 대한 심도 깊은 논의가 요구
되며 의장국으로서의 한국의 주도적 활동에 대한 요청이 많은 상태임
특히 신규 작업들이 요구되는 JWG5와 WG6와 연관하여 용어 부합화를 위한 국내 아
이디어 도출과 이에 대한 신속한 물적, 인적 국제 표준화 지원이 요구됨
WG 2 (Personal care robot safety)
WG 2 name change 에 관한 논의
WG2 명칭 변경 관련 기한 및 절차에 대한 공식 요청을 secretary Katarina에게 보냄
à 변경 요청은 SG1에서 논의되도록 SG1에 전달되었고, gaps & overlap 관련하여
TC 299에도 보고되었으며 이번 교토 plenary에서 이 안건에 대해 결정하도록 공식
요청 보냄
Round robin test for 23482-1 test methods
23482-1의 test methods 중 각국에서 직접 수행하여 test method의 reliability를 검증
(round robin test)할 수 있는 항목을 이미 한차례 조사하였으나 미국에서 조사 관련
정보가 부족하여 응답하지 못하였다고 하여 재조사하기로 함
문서의 publication과는 관계가 없으며 다만 publication 후 문서의 활용 관련한 정보
확보 차원에서 진행하기로 함
10월 회의전까지 각국 reply 접수 예정
Revision of 13482
General(13482-1, 로봇 종류 무관하게 적용되는 공통안전 규격) & type specific
safety requirement 개발하기로 함 (23482-1 & -2 문서 publication 이후)
10월 회의에서 type specific standard 개발에 앞서 필요한 preliminary discussion 시
작 하기로 함
- 5 -
(한국 의견) 4개의 표준을 동시에 개발하는 것은 부담되는 일이므로 일정 재고려 필요
General standard 13482-1을 개발할 때 WG 3의 input을 고려할 필요 있다는 의견도
있음
ISO /TR 23482-1
접수된 comment가 전혀 없어서 논의 하지 않음
일본 Yoji가 문서를 최종형태로 준비하여 7월 중순까지 balloting을 위해 Convenor인
Osman와 TC 299에 제출하기로 함
10월 회의전에 ballot 마무리 하고 10월 회의에서 ballot에서 collect된 모든 comment
를 resolve한 후 2019년 1월 publication을 위해 TC 299에 최종 정리된 문서 제출하
기로 함
향후 일정 및 계획
Time ISO TR 23482-1(Safety-related test methods)
Oct 2018- 2 day meeting for part 1- Resolve comments- Tidy up document
Jan 2019Convenor: Submit final document for publication and handle
editorial stuffWG2: Start on ISO 13482 revision
App guide
ISO/DTR 23482-2 ballot 결과: 27개국 투표, 11찬성, 4 approval with comments, 2 반
대, 10 abstention으로 통과
340 comment 접수되었으며, 2.5일 동안 모든 comment resolved 됨
Robot type간의 overlap을 illustrate하는 Fig. 4.2가 혼란을 줄 여지가 있으므로 삭제
Robot sw app을 이용하여 robot의 intended use가 변경될 경우, 변경된 intended use
에 맞는 risk assessment를 sw developer와 제조사가 수행하도록 함
일본의 Hidi가 문서와 comment file을 6월 10일까지 정리하여 project leader인 한국
의 곽관웅 교수와 Convenor인 Osman에게 제출한 후 곽관웅 교수와 Osman이 최종
editing 작업 후 7월 중/말까지 publication을 위해 최종 문서를 TC 299 Katarina에게
제출하기로 함 (TR이므로 추가 balloting 없음)
2019년 1월 publication 예정
- 6 -
WG 3 (Industrial safety)
산업용 로봇 용어 정의에 관한 논의
WG 1에서 요청한 산업용로봇 정의에 대한 논의가 있었으나, 아무래도 오랜기간 사
용되어온 용어를 변경하는 것에 대한 거부감이 있었고, 향후 시간을 두고 논의하기
로 함
한국 경희대학교 임성수교수가 인체 15개점을 중심으로 Pain Threshold에 대한 연구
결과를 발표함
전반적으로 독일 Mainz 대학에서 진행하였고, ISO/TS 15066에 반영된 Force 및
Pressure와 유사한 결과를 보였으나, 세부적으로 볼 때 조금 다른 결과가 나온 점도 있
다는 것이 보고됨. 향후 본 내용이 10218에 반영될 예정으로 그 시점에서 여러개의
data값을 어떻게 활용할지 검토하기로 함
ISO/CD 10218-1 및 ISO 10218-2
10218-1, -2에 대한 CD ballot초안을 작성하기위하여 진행된 internal comment를 중
심으로 이에 대한 comment resolution을 진행함
ISO/CD 10218-1 preparation for DIS ballot in 2019
10218-2 preparation for DIS ballot in 2019
ISO/NP 11593 planning for DIS ballot in 2019
Revision of ISO 11593
현재까지 남아있는 몇 개의 현안에 대하여서는 Homework Team을 구성하여 초안을
마련하기로 함.
향후 WG 3 일정
2018 Sep.10-14, Collingwood Canada
2019 feb 11-15, Melbourne
2019 june 24-28, berlin
2019 fall: TBD(Ireland)
WG 4 (Service robots)
Report on the IEC activities
- 7 -
IEC ACART에서 제안한 ISO/IEC Joint Adviory Group에 대하여 IEC SMB는 ISO TMB
와 논의하여 보겠다고 의결을 하였으나, ISO TMB는 현재처럼 ISO TC 299와 IEC간
에 Liaison을 할 것을 의결함. 이에 따라, IEC SMB도 아마 자체적으로 계속 ACART
를 유지할지 아니면 다른 형태의 조직을 제안할지 등이 예상됨
ISO/DIS 18646-2 DIS 투표 완료
DIS 가 통과 되었으며, 제시된 의견을 대상으로 comment resolution을 이어감
Mobile robot에서 18646-2 navigation의 6절 Path accuracy는 시장에 나와있는 로봇
제품에서 실제로 사용하지 않으므로 전체 삭제하기로 함
또한 본 문서의 Title을 Navigation으로 할지 아니면 현재 남아있는 내용을 반영하여
Path characteristics and Obstacle avoidance로 해야 할지를 다음회의에서 모든
comment resolution을 완료한 이후에 최종 결정하기로 함
ISO/NP 18646-3(manipulation performance)
ISO 18646-3 문서는 시간 관계상 이번 회의에서 internal comment를 다루지 못하고,
다음 회의에서 다루기로 하였으며, 그 이후에 CD ballot를 제안하기로 함
wearable robot performance NP 관련 논의
Comment resolution on “wearable robot performance” NP 가 성공적으로 통과 되
었으며, 이에 따른 comment resolution 을 진행하였으나, 역시 wearable robot 전체
를 다루고 있지 않다는 의견에 대하여 다음 회의에서 전체 comment resolution을 진
행한 이후에 결정을 하기로 함
specific two type 로봇만 다루므로 title을 구체화하거나 아니면 두 로봇에 대한 개
별 표준으로 분리하는 것을 고려하기로 함
특허권이 없는 평가방법이 제시되면 고려하기로 함
기타 논의
현재 3개의 문서가 다루어지고 있는 상황이라, 1.5일로는 시간이 모자르다고 판단되
어 차기 회의부터는 회의 기간을 2.5일로 늘리기로 함
WG 6 (Modularity for service robots)
ISO/NP 22166-1 Robotics - Modularity for service robots - Part 1: General
requirements : Safety 관련 논의
- 8 -
코멘트에 따라 관련 절을 많이 바꿀 것
응용 레벨 안전을 고려한 모듈 레벨 안전을 설명
• 8절에도 관련 내용 설명, Security와 safety가 템플릿에서 언급 필요함
Safety (supervisor) 모듈에 대한 설명이 수정되고, 7절에서 언급 필요
Security (supervisor) 모듈 포함
모듈 생산자가 필요한 안전 요구조건들에 대한 유스케이스를 정의할 수 있도록 6
단계를 기술
추가적인 안전 관련 신호들의 도입을 위한 고전적이고 새로운 모듈화 방식을 보여
줄 수 있는 예제 제시
SysML 그림에서 module level safety와 PL level를 표시할 수 있도록 할 것
ISO/NP 22166-1 Robotics - Modularity for service robots - Part 1: General
requirements : HW aspects 관련 논의
HW Modules의 정의 변경 요청
• 정의 변경은 추 후 definition group에서 협의함. 그러나 안될 것으로 합의 불가능함
다음과 같이 CD2 문서를 위해 추가함
• 4절의 템플릿을 사용하여 하드웨어를 설명
• 그림 수정
• 하이브리드 커넥트 정의를 새롭게 함
• 로봇 생산자와 모듈 생산자를 위한 요구사항들을 정리
• 검사 및 검증을 위한 기계적/전기적 매커니즘과 측정 방식을 고려함.
• 하드웨어의 라이프 사이클을 고려함
• 모듈의 고장 진단을 할 수 있는 데이터 셋 준비 (소리 및 진동 센서 등)
ISO/NP 22166-1 Robotics - Modularity for service robots - Part 1: General
requirements : SW aspects 관련 논의
CD 코멘트에 따라 수정이 완료됨
Table 7.1의 변경에 따라 관련 내용 정리
API를 사용하지 말고 Information model이라는 절 내에서 model이라는 명칭으로 변
경하여 관련 내용 설명
• guidelines 혹은 필요한 기능을 제시
- 9 -
HAL의 내용은 삭제하는 대신에 HAL에 대한 개략적인 내용을 추가함
Safety/Security 관련 절을 생성하여 내용 작성
• PHM(Prognostic Health Monitoring) 관련 설명을 추가
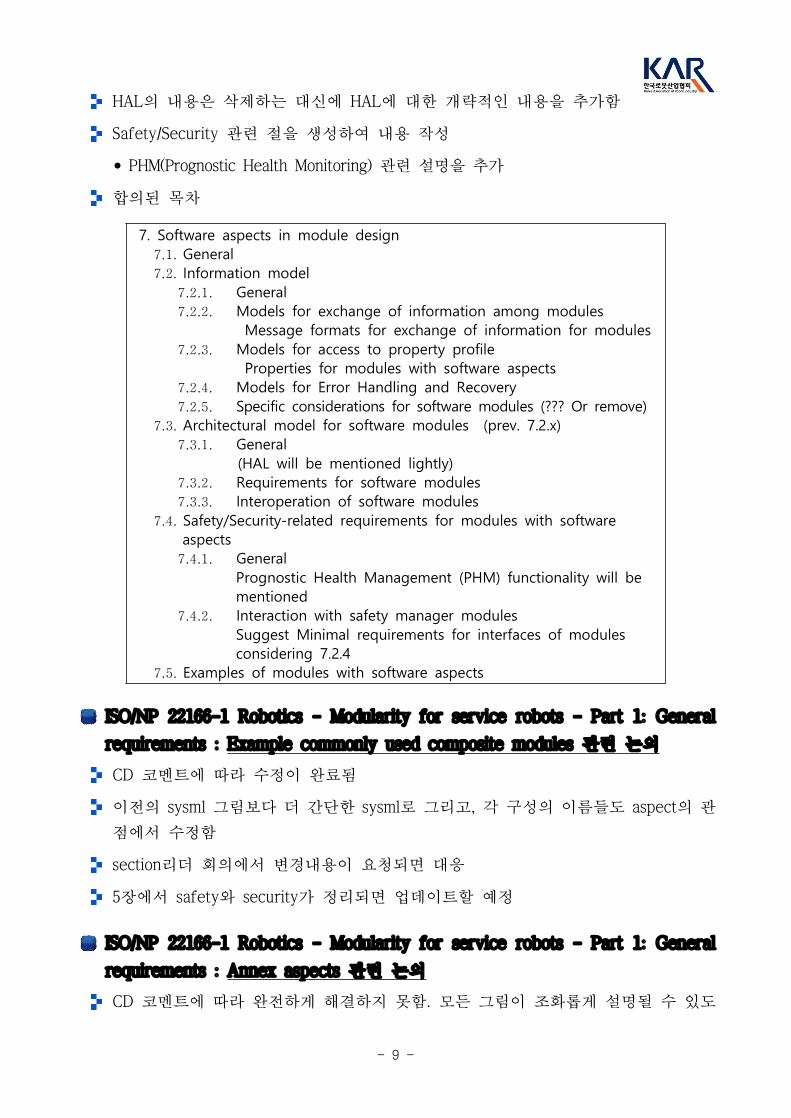
합의된 목차
7. Software aspects in module design7.1. General 7.2. Information model
7.2.1. General 7.2.2. Models for exchange of information among modules
Message formats for exchange of information for modules7.2.3. Models for access to property profile
Properties for modules with software aspects7.2.4. Models for Error Handling and Recovery 7.2.5. Specific considerations for software modules (??? Or remove)
7.3. Architectural model for software modules (prev. 7.2.x)7.3.1. General
(HAL will be mentioned lightly)7.3.2. Requirements for software modules7.3.3. Interoperation of software modules
7.4. Safety/Security-related requirements for modules with software aspects
7.4.1. General Prognostic Health Management (PHM) functionality will be
mentioned7.4.2. Interaction with safety manager modules Suggest Minimal requirements for interfaces of modules
considering 7.2.47.5. Examples of modules with software aspects
ISO/NP 22166-1 Robotics - Modularity for service robots - Part 1: General
requirements : Example commonly used composite modules 관련 논의
CD 코멘트에 따라 수정이 완료됨
이전의 sysml 그림보다 더 간단한 sysml로 그리고, 각 구성의 이름들도 aspect의 관
점에서 수정함
section리더 회의에서 변경내용이 요청되면 대응
5장에서 safety와 security가 정리되면 업데이트할 예정
ISO/NP 22166-1 Robotics - Modularity for service robots - Part 1: General
requirements : Annex aspects 관련 논의
CD 코멘트에 따라 완전하게 해결하지 못함. 모든 그림이 조화롭게 설명될 수 있도
- 10 -
록 그림들을 자시 조정함.
각 예제에서 하나의 행위(behaviour)만 추가하는 것으로 단순화시킴
• Examples enhanced as per Han’s Example 1: Mobile servant robot
• Example 2: Physical assistant robot
• Example 3: Person carrier robot
• Example 5.1: Autonomous transportation robot
• Example 5.2: Mobile manipulator
• Example 5.3: Cooperative modular multi-robot system
• Example 5.4: Reconfigurable robot
• Example 6: Service robot in medicine
향후 일정
CD v.2를 가지는 것으로 하며, 이 경우 표준이 46개월 트랙에서 48개월 트랙으로
변경될 수 있음
JWG 35 (수술로봇)
IEC/CDV 80601-2-77 comments resolve
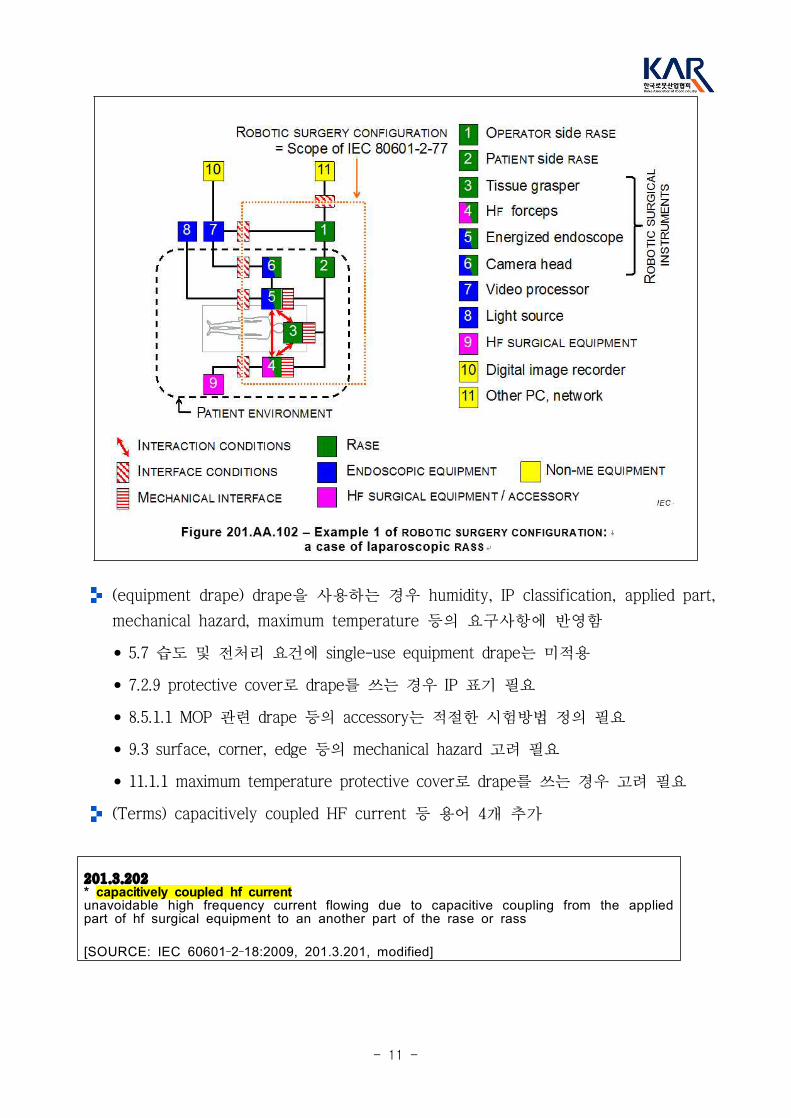
(Robotic Surgery Configuration) IEC60601-2-18 내시경 개별표준을 인용하며 용어에
대한 합의를 이끌어 냄
• interaction condition, interface condition, mechanical interface로 equipment 간의
configuration을 정리함
• interconnection condition 개념 대신 interaction condition을 사용
* interconnection condition은 energy hazard 기반으로 정의된 용어로 이를 구분하기 위함
• 최종 scope도 interaction conditions과 interface condition으로 정리
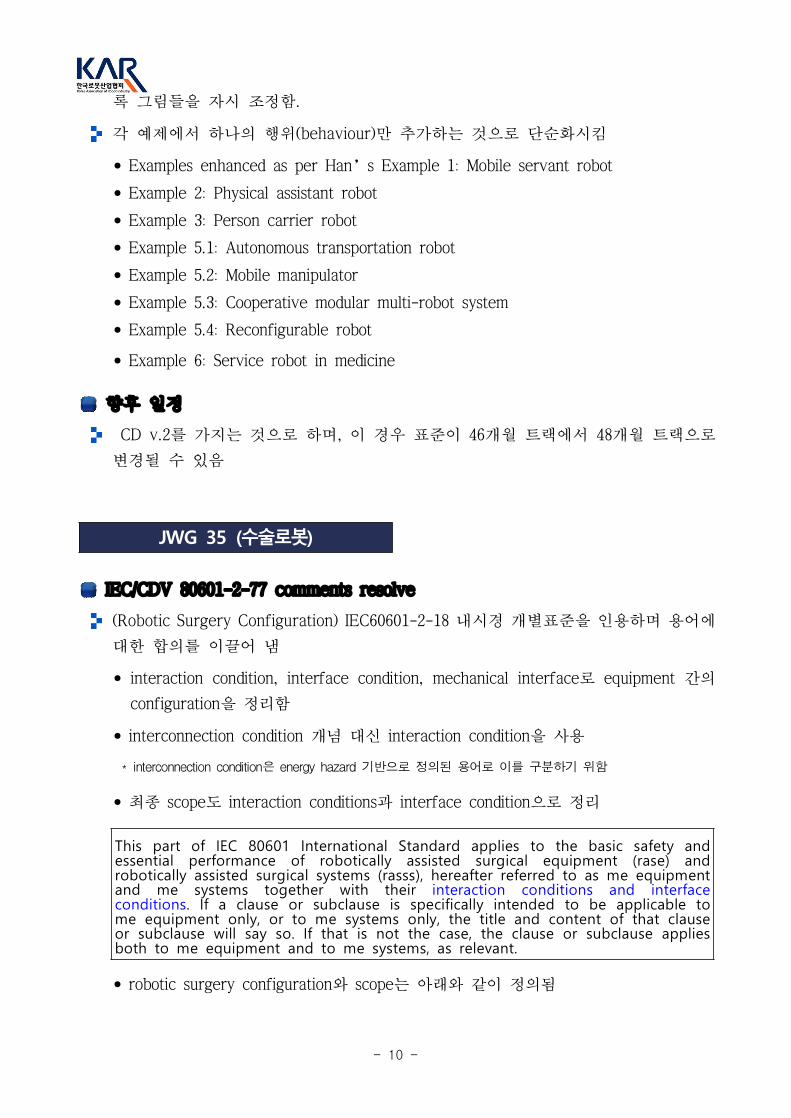
This part of IEC 80601 International Standard applies to the basic safety and essential performance of robotically assisted surgical equipment (rase) and robotically assisted surgical systems (rasss), hereafter referred to as me equipment and me systems together with their interaction conditions and interface conditions. If a clause or subclause is specifically intended to be applicable to me equipment only, or to me systems only, the title and content of that clause or subclause will say so. If that is not the case, the clause or subclause applies both to me equipment and to me systems, as relevant.
• robotic surgery configuration와 scope는 아래와 같이 정의됨
- 11 -
(equipment drape) drape을 사용하는 경우 humidity, IP classification, applied part,
mechanical hazard, maximum temperature 등의 요구사항에 반영함
• 5.7 습도 및 전처리 요건에 single-use equipment drape는 미적용
• 7.2.9 protective cover로 drape를 쓰는 경우 IP 표기 필요
• 8.5.1.1 MOP 관련 drape 등의 accessory는 적절한 시험방법 정의 필요
• 9.3 surface, corner, edge 등의 mechanical hazard 고려 필요
• 11.1.1 maximum temperature protective cover로 drape를 쓰는 경우 고려 필요
(Terms) capacitively coupled HF current 등 용어 4개 추가
201.3.202* capacitively coupled hf currentunavoidable high frequency current flowing due to capacitive coupling from the applied part of hf surgical equipment to an another part of the rase or rass
[SOURCE: IEC 60601‑2‑18:2009, 201.3.201, modified]
- 12 -
(Collision) RASE 자체 및 타 물체와 충돌 가능성에 다한 요구사항 추가
• 복수의 포트 수술로봇 등, equipments 간 충돌 등을 고려하여, equipments 손상,
calibration 손실, recover 등을 고려해야 함
• 적합성은 risk management file 또는 필요시 functional test를 통해 검증을 요구하고 있음
ISO TC299 plenary JWG5/IEC TC62 SC62, SC62D
ISO TC299 plenary meeting에서 의료로봇 분과 JWG5와 연계되는 JWG9, JWG35,
JWG36에 대한 내용을 총괄적으로 발표함
• IEC/TR60601-4-1은 후속조치에 대해서 논의되고 있지 않으며, IEC60601-1 3.2 또는
4판 개정시 Annex 정도로 삽입될 것으로 전망
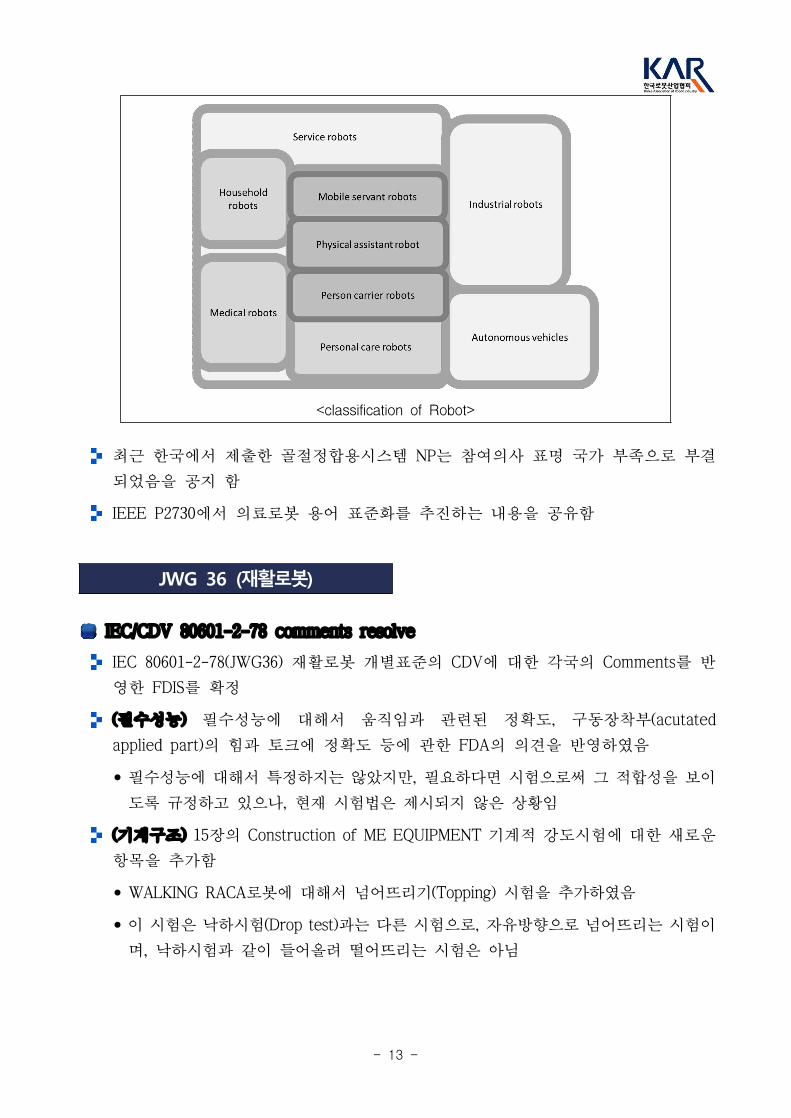
의료로봇이 서비스로봇 산업 하위로 분류하고자 하는 ISO TC299 서비스로봇 전문
가의 의견에 대해 별도의 의료로봇 산업으로 분류 요구
• SG1 definition and gap 분과에서 관련 사항을 계속해서 논의 예정
* IFR 로봇산업 통계조사 기구도 로봇을 크게 산업용로봇과 서비스로봇으로 구분하고 있으며,
전문 서비스로봇의 일부로 의료로봇을 분류하고 있음
201.3.204high frequencyfrequencies less than 5 MHz and generally greater than 200 kHz
[SOURCE: IEC 60601‑2‑2:2017, 201.3.220]
201.3.205hf surgical accessoryaccessory intended to conduct, supplement or monitor hf energy applied to the patient from hf surgical equipment
[SOURCE: IEC 60601‑2‑2:2017, 201.3.223, modified – The notes have been deleted.]
201.3.207* interaction conditionsconditions that shall be fulfilled to achieve basic safety when rase or rass is used simultaneously with multiple robotic surgical instruments or with an applied parts of other me equipment, at least one applied part of which uses energy for providing its intended use, e.g. hf current, ultrasound, or laser
[SOURCE: IEC 60601‑2‑18:2009, 201.3.210, modified]
- 13 -
<classification of Robot>
최근 한국에서 제출한 골절정합용시스템 NP는 참여의사 표명 국가 부족으로 부결
되었음을 공지 함
IEEE P2730에서 의료로봇 용어 표준화를 추진하는 내용을 공유함
JWG 36 (재활로봇)
IEC/CDV 80601-2-78 comments resolve
IEC 80601-2-78(JWG36) 재활로봇 개별표준의 CDV에 대한 각국의 Comments를 반
영한 FDIS를 확정
(필수성능) 필수성능에 대해서 움직임과 관련된 정확도, 구동장착부(acutated
applied part)의 힘과 토크에 정확도 등에 관한 FDA의 의견을 반영하였음
• 필수성능에 대해서 특정하지는 않았지만, 필요하다면 시험으로써 그 적합성을 보이
도록 규정하고 있으나, 현재 시험법은 제시되지 않은 상황임
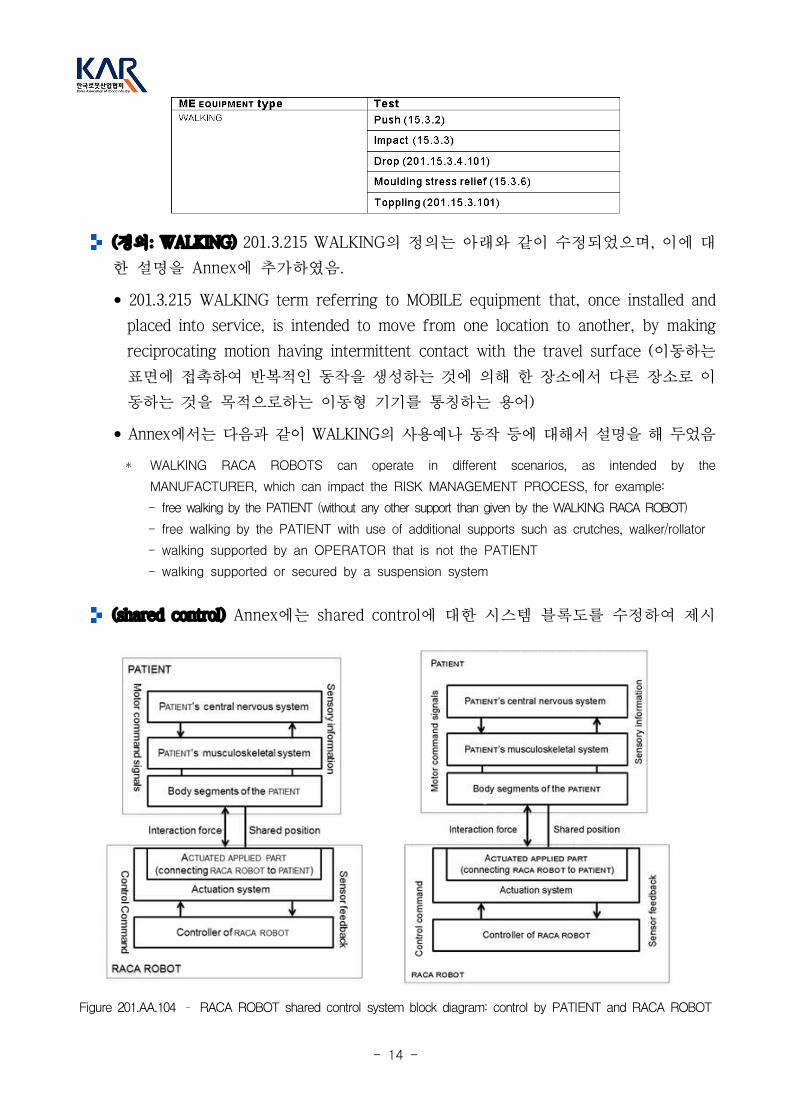
(기계구조) 15장의 Construction of ME EQUIPMENT 기계적 강도시험에 대한 새로운
항목을 추가함
• WALKING RACA로봇에 대해서 넘어뜨리기(Topping) 시험을 추가하였음
• 이 시험은 낙하시험(Drop test)과는 다른 시험으로, 자유방향으로 넘어뜨리는 시험이
며, 낙하시험과 같이 들어올려 떨어뜨리는 시험은 아님
- 14 -
(정의: WALKING) 201.3.215 WALKING의 정의는 아래와 같이 수정되었으며, 이에 대
한 설명을 Annex에 추가하였음.
• 201.3.215 WALKING term referring to MOBILE equipment that, once installed and
placed into service, is intended to move from one location to another, by making
reciprocating motion having intermittent contact with the travel surface (이동하는
표면에 접촉하여 반복적인 동작을 생성하는 것에 의해 한 장소에서 다른 장소로 이
동하는 것을 목적으로하는 이동형 기기를 통칭하는 용어)
• Annex에서는 다음과 같이 WALKING의 사용예나 동작 등에 대해서 설명을 해 두었음
* WALKING RACA ROBOTS can operate in different scenarios, as intended by the
MANUFACTURER, which can impact the RISK MANAGEMENT PROCESS, for example:
- free walking by the PATIENT (without any other support than given by the WALKING RACA ROBOT)
- free walking by the PATIENT with use of additional supports such as crutches, walker/rollator
- walking supported by an OPERATOR that is not the PATIENT
- walking supported or secured by a suspension system
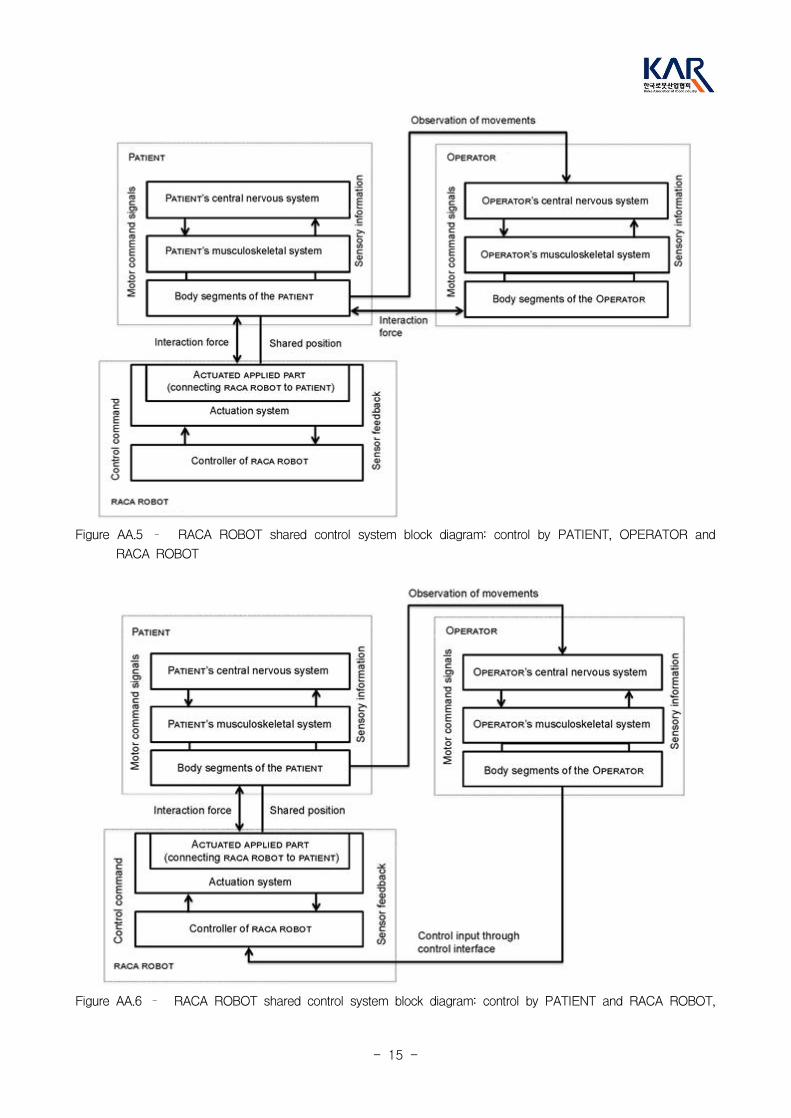
(shared control) Annex에는 shared control에 대한 시스템 블록도를 수정하여 제시
Figure 201.AA.104 – RACA ROBOT shared control system block diagram: control by PATIENT and RACA ROBOT
- 15 -
Figure AA.5 – RACA ROBOT shared control system block diagram: control by PATIENT, OPERATOR andRACA ROBOT
Figure AA.6 – RACA ROBOT shared control system block diagram: control by PATIENT and RACA ROBOT,
- 16 -
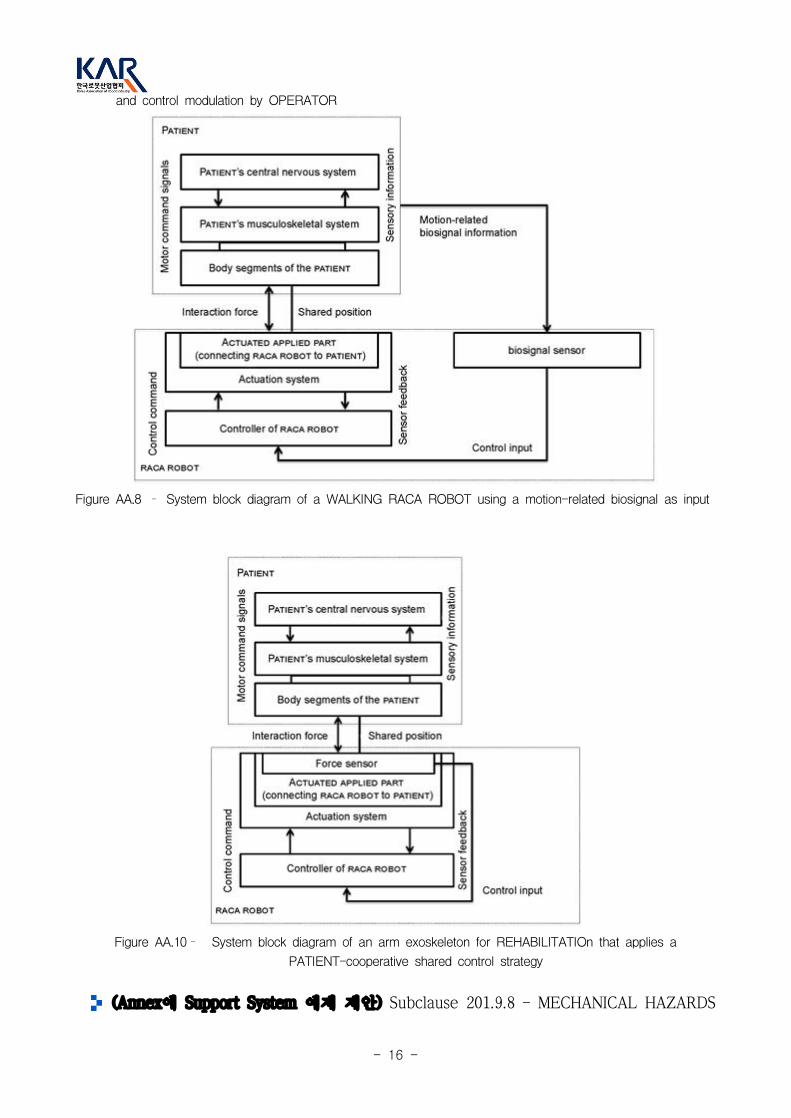
and control modulation by OPERATOR
Figure AA.8 – System block diagram of a WALKING RACA ROBOT using a motion-related biosignal as input
Figure AA.10– System block diagram of an arm exoskeleton for REHABILITATIOn that applies aPATIENT-cooperative shared control strategy
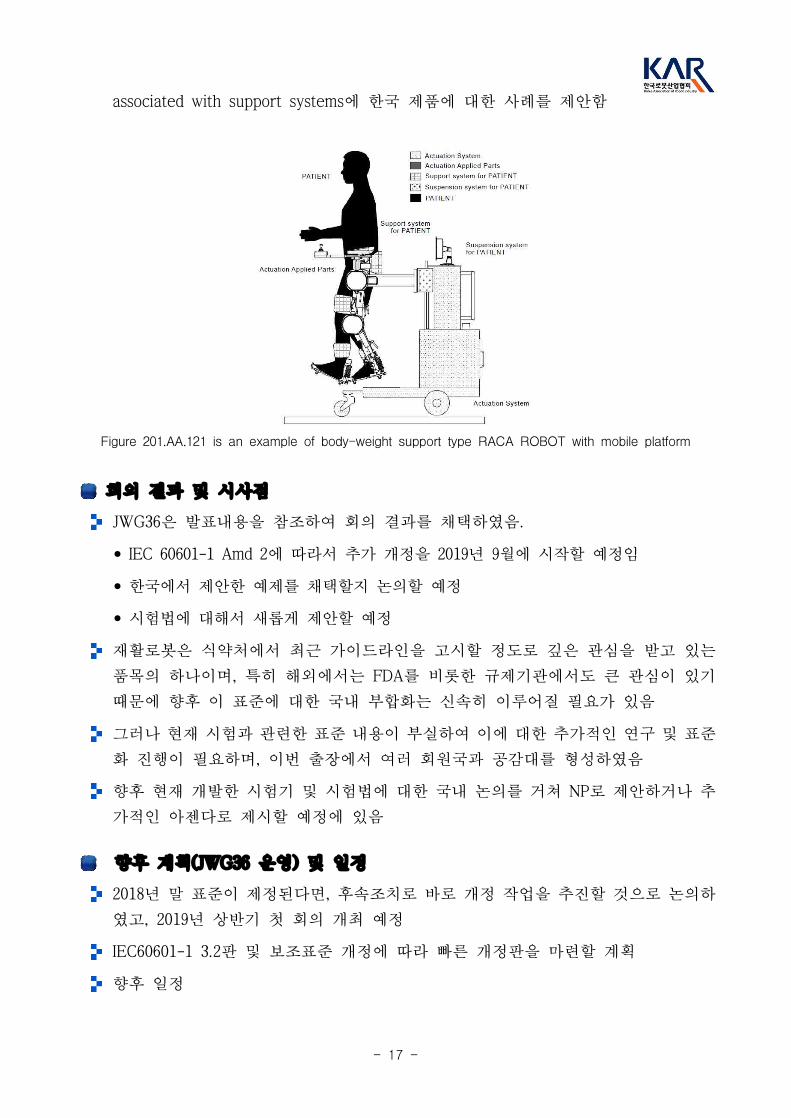
(Annex에 Support System 예제 제안) Subclause 201.9.8 – MECHANICAL HAZARDS
- 17 -
associated with support systems에 한국 제품에 대한 사례를 제안함
Figure 201.AA.121 is an example of body-weight support type RACA ROBOT with mobile platform
회의 결과 및 시사점
JWG36은 발표내용을 참조하여 회의 결과를 채택하였음.
• IEC 60601-1 Amd 2에 따라서 추가 개정을 2019년 9월에 시작할 예정임
• 한국에서 제안한 예제를 채택할지 논의할 예정
• 시험법에 대해서 새롭게 제안할 예정
재활로봇은 식약처에서 최근 가이드라인을 고시할 정도로 깊은 관심을 받고 있는
품목의 하나이며, 특히 해외에서는 FDA를 비롯한 규제기관에서도 큰 관심이 있기
때문에 향후 이 표준에 대한 국내 부합화는 신속히 이루어질 필요가 있음
그러나 현재 시험과 관련한 표준 내용이 부실하여 이에 대한 추가적인 연구 및 표준
화 진행이 필요하며, 이번 출장에서 여러 회원국과 공감대를 형성하였음
향후 현재 개발한 시험기 및 시험법에 대한 국내 논의를 거쳐 NP로 제안하거나 추
가적인 아젠다로 제시할 예정에 있음
향후 계획(JWG36 운영) 및 일정
2018년 말 표준이 제정된다면, 후속조치로 바로 개정 작업을 추진할 것으로 논의하
였고, 2019년 상반기 첫 회의 개최 예정
IEC60601-1 3.2판 및 보조표준 개정에 따라 빠른 개정판을 마련할 계획
향후 일정
- 18 -
• 18년 7~9월 FDIS 문서편집 및 프랑스어 번역
• 18년 10월~11월 FDIS Vote
• 18년 12월 IEC80601-2-78 최종 발간
• 19년 9월 JWG36 후속 회의
SG 1 (Gaps and structure)
독일에서 향후 방안에 대하여 그동안 한국이 제안한 것과 유사하게
계층적인 구조를 같는 방식을 제안함
안전 표준의 경우에, 모든 형태의 로봇(머니퓰레이터, 이동플랫폼, 착용식로봇)에 대
한 일반 로봇 안전 표준을 만들고, 이에 따라서 특정 응용의 안전 표준(산업용 머니
퓰레이터 안전 표준, 서비스용 이동로봇 안전표준 등)을 만드는 방안을 제시함
어휘, 성능평가, 상호호환성 표준은 모든 로봇에 해당하는 형태로 개발하는 방안을
제시함
이는 한국이 그동안 제안한 계층적 형태의 표준과 유사한 것으로 안전표준에 있어
서 차이점은 한국은 머니퓰레이터 안전표준, 이동로봇 안전표준, 착용식로로봇 안전
표준을 제안하였던 것에 비하여 하나의 로봇안전표준을 제시하였다는 점을 빼고는
매우 유사한 방식임
한국은 이를 적극적으로 지지하고 향후 자세한 내용을 같이 논의하기로 함
향후 행보
일단 SG 1을 계속 유지하되, 구체적인 진전이 빠르게 있어야 할 것으로 결정