Embed Size (px)
Citation preview

Esercitazioni di Geomatica I
DRM | Introduzione alle misure geodetiche 5
1 Introduzione alle misure geodetiche
Le misure geodetiche (o topografia) sono una disciplina antica, ma in continua evoluzione, che in‐sieme alla geodesia, la fotogrammetria, il telerilevamento ed i sistemi informativi territoriali costitui‐sce quella scienza che oggi si definisce geomatica.
1.1 Storia della topografia Il termine topografia, che deriva dal greco topos(luogo) e
graphein (scrivere), è la scienza che studia gli strumenti ed i me‐todi operativi, sia di calcolo sia di disegno, che sono necessari per ottenere una rappresentazione grafica, più o meno partico‐lareggiata, di una parte della superficie terrestre: la topografia ha carattere applicativo e trae la sua base teorica dalla matema‐tica, dalla geometria e dalla fisica.
Da un punto di vista storico, alcune delle più antiche rappre‐sentazioni a noi note furono create in Mesopotamia, nell’attuale area occupata dallo stato dell’Iran, intorno al 2400 A.C.; queste carte topografiche rappresentanti i confini delle proprietà priva‐te furono realizzate ed utilizzate al fine di determinare le tassa‐zioni. nonostante la pratica di rilievo e rappresentazione carto‐grafica continua ad evolversi ed essere praticata, il termine topografia viene invece introdotto solo molto dopo da Strabone (geografo greco, 58 A.C.).
I romani utilizzavano già già metodi di rilievo ben definiti e basati sull’utilizzo di due assi perpendi‐colari per procedere al rilevamento delle proprie urbanizzazioni. Tali assi, orientati da Est ad Ovest (il cardo) e dal Nord a Sud (il decumano), venivano tracciati con la Groma, il precursore dello squadro agrimensorio, utilizzato sino a pochi decenni fa. Le misurazioni lineari venivano invece realizzate tra‐mite pertiche, sia in planimetria, sia in altimetria. Metodi simili furono usati fino alla fine del Medioe‐vo. Sebbene fosse in vigore l’utilizzo di tali strumenti e metodologie, l’utilizzo di queste tecniche era
limitato al rilievo di oggetti limitati nella loro estensione come edifici, cit‐tà o piccole aree. La mappatura a grande scala che era invece ancora ba‐sata su appunti, racconti e giornali di bordo tenuti dai grandi esploratori conteneva ancora forti elementi di immaginazione piuttosto che di osser‐vazione. Come risultato, mentre le carte a piccola scala riuscivano a rap‐presentare con “piccoli errori” la realtà, quelle a grande scala conteneva‐no “errori grossolani” ed il loro utilizzo risultava quindi molto limitato.
Solo nel XVII sec. in Svezia, in Olanda e in Francia, si cominciarono a eseguire lavori topografici di una certa importanza Per vedere un primo rilievo topografico effettuata a grande scala (e quindi con buone preci‐sioni), occorre attendere il 1793 quando la Francia pubblicò la Carta Cas‐sini: la prima carta a scala nazionale basata sui rilievi topografici iniziati
dallo stesso Giovanni Domenico Cassini nel 1670 e terminati nel secolo successivo dai suoi figli e ni‐poti. L’unico limite di questa carta è dato dal fatto che la rappresentazione, ad esclusione di alcuni punti limitati, è piana e non contiene informazioni dettagliate sulle quote.
Sebbene il concetto di curve di livello (che consente di rappresentare su di un piano l’informazione legata all’altimetria) venne elaborato per la prima volta dall’ingegnere francese J.L. Dupain‐Triel nel 1791, questo non fu applicato fino alla seconda metà dell’800.
Figura 1 ‐ Antica tavola topografica
Figura 2 ‐ Antico teodolite

Esercitazioni di Geomatica I
6 Introduzione alle misure geodetiche | SUPSI‐DACD
In Svizzera, la commissione di topografia elaborò per la prima volta nel 1832 un criterio completo per il rilevamento del territorio e per la realizzazione di una carta topografica dell’intero territorio svizzero. Nel 1832 Dufour fu nominato dallo Stato Maggiore Generale alla direzione dei rilevamenti. La suddivisione in fogli da lui prevista (tutta la carta topografica è formata da 25 fogli) viene usata an‐cora oggi per la carta geografica in scala 1:100.000. Nel 1861 le misurazioni e i rilevamenti erano con‐clusi, nel 1865 fu stampato l’ultimo foglio e l’Ufficio topografico federale svizzero fu trasferito a Ber‐na. Tra il 1845 e il 1865 furono stampate 57.952 copie della carta topografica della Svizzera.
1.2 Applicazioni delle misure geodetiche Le misure geodetiche consistono essenzialmente nell’applicare delle tecniche di rilievo al fine di
determinare le coordinate planimetriche ed altimetriche di punti. Queste coordinate sono utili sia in fase di progettazione che di realizzazione in numerose attività.
Costruzione
In questo caso il rilievo mira a determinare sul territorio tutti quei punti fissi ed a rilevare tutte quelle informazioni necessarie per la preparazione dei documenti di base per i diversi progetti di co‐struzione. Queste sono necessarie infatti sia per la realizzazione di semplici opere che di grandi opere quali ponti, gallerie, complessi immobiliari, dighe, etc.
Viabilità
Il rilievo fornisce vitali informazioni per la progettazione di strade e ferrovie dove è necessario di‐sporre di tutte quelle informazioni sul terreno che verrà toccato dal percorso, in particolare interes‐sano le pendenze e la presenza di elementi di ostacolo. Anche però in fase realizzativa la topografia dà un enorme contributo alla realizzazione dell’opera, infatti è necessario mantenere con precisione i percorsi progettati, le curvature studiate e le pendenze previste per poter realizzare strutture di qua‐lità. In questo caso quindi l’oggetto della topografia in questo tipo di applicazioni è la determinazione di sezioni, profili, e modelli delle altezze del terreno.
Monitoraggio
Molto spesso dopo la realizzazione di opere civili è necessario effettuare dei controlli di stabilità. Nell’effettuare questi controlli è indispensabile identificare la posizione nel tempo di determinati punti chiave della struttura, al fine di determinare gli spostamenti (cedimenti, ribaltamenti, etc.) e le velocità. Questi strumenti al fine di prevenire disastri.
Opere Sotterranee
In questo tipo d’applicazione è particolarmente importante determinare angoli e direzioni con ele‐vata precisione. Nella costruzione di gallerie, miniere o tunnel è necessario operare con tecniche specifiche che spesso differiscono da quelle normalmente utilizzate in superficie.
Industriale
La topografia interviene anche nei progetti di realizzazione di impianti industriali a grande scala come il posizionamento di ponti mobili, o la realizzazione di veicoli di grande taglia quali aerei o navi, o ancora l’installazione di grandi macchine come turbine o acceleratori. In tutti questi campi, la topo‐grafia deve determinare coordinate molto accurate.
Idrografia
Il rilievo dei corsi d’acqua non può prescindere dal rilievo di profili, pendenze e percorsi. Sono in‐fatti informazioni vitali per determinare i volumi, le portate e le aree inondabili. Anche per la naviga‐zione è indispensabile conoscere l’andamento dei fondali (di laghi, fiumi o mari) al fine di garantire la

Eserci
sicurezzautilizzate
Cata
Siccomstrumendici che samento
itazioni di Ge
a. In questi ue per rilievi s
asto
me è nata pnti e tecnichesono legati ao dei dati.
eomatica I
ultimi casi la superficiali.
per questo se di rilievo cha queste app
Figura 3 ‐
topografia s
scopo, la tophe sono di riplicazioni rich
Esempli di cam
DRM | Uni
si avvale di n
pografia perferimento phiedono un e
mpi d'applicazio
tà di misura
nuove metod
r il rilievo deer tutte le aelevato rigor
one delle misur
e grandezze
dologie che d
ei livelli cataltre applicazre sia nella m
re geodetiche
e misurabili
difficilmente
astali utilizzazioni. Gli aspemisura che ne
7
vengono
a metodi, etti giuri‐el proces‐

Esercitazioni di Geomatica I
8 Unità di misura e grandezze misurabili | SUPSI‐DACD
2 Unità di misura e grandezze misurabili
Le osservazioni topografiche sono costituite principalmente da misure lineari e misure angolari. Queste misure sono sempre espresse nelle unità di misura del sistema internazionale (SI, Système In‐ternational d'unités).
2.1 Misure lineari Si utilizza come unità di misura il metro (m) così come definito dal Sistema Internazionale:
Cioè:
dove
t = 1/299'792’458 [s] , c = 299'792’458 [m/s]
I simboli c, t e s indicano rispettivamente la velocità della luce nel vuoto, il tempo e i secondi. Poi‐ché la costante universale della velocità della luce c non è misurabile, ma è assunta come valore noto e fisso, ne consegue che la definizione di metro dipende dalla componente temporale t.
2.2 Misure di angoli Sebbene l’unità di misura degli angoli piani definita dal SI sia il radiante (rad):
nelle applicazioni topografiche si tende ad usare il grado centesimale (gon o grad), che è una uni‐tà derivata, ma anche altre unità di misura quali i gradi sessagesimali (deg o °).
Le seguenti conversioni sono definite:
Allo stesso modo delle altre unità di misura sono definite delle sotto unità, ed in particolare:
Gon (grad) Deg (°)
Decigon: 1 dgon = 0.1 gon
Centigon: 1 cgon = 0.01 gon
Milligon: 1 mgon = 0.001 gon
Minuto centesimale: 1 C = 0.01 gon = 1 cgon
Secondo centesimale: 1 CC = 0.0001 gon = 0.1 mgon
Minuto: 1’ = 1 deg / 60
Secondo: 1’’ = 1’ / 60
2π = 400 Gon = 360 Deg
“rapporto tra la lunghezza di un arco di circonferenza spazzato dall'angolo, diviso per la lunghezza del raggio di tale circonferenza”.
1 ·
“unità di spazio vuoto percorso da un raggio di luce nel tempo di 1/299'792’458 di secondo”

Eserci
Dalle
Da cu
Ricord
•
•
•
Vedia
itazioni di Ge
definizioni d
i si ricava fac
diamo infine
i gradi sedecimale
i gradi cesimali o c
i radianti
mo ad esem
Figura 4 ‐ Ang
eomatica I
delle unità di
cilmente:
alcune cara
essagesimali entesimali pocome valore possono esp
mpio come si
1
1
1
golo retto
misura degl
tteristiche e
possono es
ossono essedecimale pressi solo co
può esprime
Ango
1 400
1 400
400 · 1
2
DRM | Uni
i angoli poss
notazioni de
ssere espress
re espressi
ome valore d
ere l’angolo
olo retto = π/
= 90
= 90
= 10
= 10
= 1.
0 2⁄
0 · 100 2⁄
100 · 100
400
tà di misura
siamo scriver
elle unità di
si come grad
come gon‐m
decimale.
retto:
/2 radianti
0o 00’ 00” (g
0.00000° (gr
00g 00c 00cc G
00.0000 Gon
.570796327
63.6620
6366.2
2 636⁄
0
e grandezze
re la seguent
misura ango
di‐minuti‐sec
minuti centes
radi sessage
adi sessadec
Gon o gradi c
n
Rad
20
6620
e misurabili
te relazione:
olari:
condi o com
simali‐secon
esimali)
cimali)
centesimali
9
me valore
di cente‐

10
2.3 EseEser
Data lungh
Eser
Scrive
abcde
Eser
In unterni
Eser
Noto lati, e no
Si calc
Unità d
ercizi
cizio 2.1
una circonfehezza pari a 6
cizio 2.2
ere in ordine
a. 84° 16’ 36b. 84,18653. 1,489945d. 92,84151e. 88g 93c 16
cizio 2.4
n triangolo Adel triangolo
rcizio 2.5
che la sommoti i seguenti
EAB = 120
ABC = 98g
BCD = 81,
DEA = 2,0
coli l’angolo
i misura e gr
erenza di rag600 m.
e decrescent
6,8’’ 39 deg 5 rad 15 gon 6,82 cc
ABC, l’angoloo (espresse i
ma degli ang angoli inter
0° 32’ 51.8’’ g 94c 90,74cc
,614568 gon
0276897 rad
CDE espress
randezze mis
ggio 1 Km, ca
e i seguenti
o in A misuran gon), sape
oli interni dini di un polig
d
so in gradi se
surabili | SU
alcolare l’am
angoli:
a 11,449121 endo che: B =
un poligonogono irregola
essagesimali.
PSI‐DACD
piezza dell’a
deg. Calcola= 3/4 C.
o è pari a 180are:
Esercita
ngolo che è
are le ampie
0° x (N‐2), do
azioni di Geo
sotteso da u
ezze dei tre a
ove N è il nu
omatica I
un arco di
angoli in‐
mero dei

Esercitazioni di Geomatica I
DRM | Sistemi di riferimento geodetici 11
3 Sistemi di riferimento geodetici
3.1 La forma della Terra Sin dagli albori dell’umanità la superficie della Terra è stata percepita come una superficie piana.
Sebbene già nel IV secolo A.C. Pitagora formulò l’ipotesi di una terra sferica occorre attendere sino al 230 A.C. per vedere un primo tentativo della determinazione del raggio terrestre. Fu infatti l’astronomo egiziano Eratostane che ricavò per primo una stima delle dimensioni della Terra.
Eratostane era venuto a conoscenza del fatto che a Syene (l'attuale Assuan), a mezzo giorno del solstizio d'estate, il Sole si trovava proprio sullo zenit (verticale), tanto che il fondo di un pozzo pro‐fondo ne veniva illuminato, perciò un bastone piantato verticalmente in un terreno perfettamente pianeggiante non avrebbe proiettato alcuna ombra in terra. Invece ad Alessandria questo non succe‐deva mai, gli obelischi proiettavano comunque la loro ombra sul terreno.
Ciò era già una dimostrazione pratica della rotondità della Terra (come ampiamente dimostrato da Aristotele, 384‐322 A.C.). L'idea che la Terra dovesse avere una forma sferica era comunque già ac‐cettata. Questa convinzione scaturiva dall'osservazione delle eclissi di Luna durante le quali la forma
dell'ombra terrestre appariva sempre come un arco di circon‐ferenza.
Eratostene perciò, per procedere con i suoi calcoli, ipotizzò la Terra perfettamente sferica ed il Sole sufficientemente di‐stante da considerare paralleli i raggi che la investono. Inoltre assunse che Alessandria e Syene si trovassero sullo stesso meridiano.
Durante il solstizio d'estate calcolò l'angolo di elevazione del Sole ad Alessandria, misurando l'ombra proiettata pro‐prio da un bastone piantato in terra, ricavando approssimati‐vamente un valore di 1/50 di circonferenza (cioè 7° 12').
La distanza tra le due città, basata sui trasferimenti delle carovane, era stimata in 5’000 stadie (circa 800 km, tuttavia il valore preciso dello stadium, usato a quell'epoca ad Alessan‐dria, non è attualmente conosciuto).
Perciò la circonferenza della Terra doveva essere di 50 * 5’000 = 250’000 stadie (circa 40’000 km, valore straordina‐riamente vicino a quello ottenuto con metodi moderni: 40’075 km).
Una volta stabilito un valore per essa, il raggio terrestre si ricavava dalla nota relazione che lega la circonferenza ed il suo raggio, ottenendo un valore di 6’314,5 km (incredibilmente prossimo alla sti‐ma media condotta con mezzi attuali)
Dopo aver considerato a lungo la Terra di forma sferica, verso la fine del XVII secolo, l’olandese Huygens e l’inglese Newton formularono l’ipotesi che non fosse perfettamente sferica ma che fosse quella di un ellissoide di rivoluzione schiacciato ai poli. Per verificare questa teoria, che era in contra‐sto con le misure del geodeta francese Cassini che notava invece un allungamento vero i poli, l’Accademia delle Scienze di Parigi decise d’inviare due spedizioni per misurare gli archi di meridiano a latitudini molto differenti: una nel 1735 in Perù e l’altra nel 1736 in Lapponia.
Figura 5 ‐ Calcolo del raggio terrestre secondo Eratostene

12
I risulrapporto
Solo da fissarekm. Altresa dell’inpiego di
Oggi, quello m
L’ideasuo movsua part
In reada una f
Per quGeoide,
Si notla superfquindi, la
Sistemi
tati indicaroo tra la differ
dopo Brougue la misura de misurazionndice di appsonde spazia
il meridianominore (Sud)
a di Newton vimento giore. Invece, pr
altà oggi si saorma geome
uesto motivoovvero una
ti come il Geficie media da superficie
di riferimen
ono chiaramerenza dei sem
uer, La Condael semiasse ni furono effiattimento tali si è potut
o "medio" è 6’356,912 km
sulla quale rnaliero, sareroprio per la
a che la formetrica perfett
o, rispetto asuperficie pe
oide, che nodegli oceani media della
nto geodetici
ente che la Tmiassi e il sem
Figura
amine, Boscmaggiore teettuate in seterrestre e dto affinare an
lungo 40’00m. Il valore d
si basava la ebbe stata psua rotazion
ma della Terrata a causa de
ll’ellissoide, erpendicolar
on è la superf(a meno delTerra.
| SUPSI‐DAC
Terra aveva miasse equa
6 ‐ Ellissoide d
ovich e Mairerrestre a 6’3eguito e portdella lunghezncora queste
09,152 km, idi appiattime
sua teoria eperfettamenne essa prend
a presenta della non omo
la superficiere in ogni pun
Figura 7 ‐ Il Geo
ficie topograll'influenza d
CD
uno schiacctoriale, che
i rotazione
re, che lo qu376,83 km etarono alla dzza del meride misure.
il semiasse mento ritenuto
era quella chte sferica a de, a suo par
diverse irregoogeneità dei
e fisica della nto alla direz
oide
afica reale, èdi maree, cor
Esercita
ciamento ai pcorrispondev
uantificaronoe del semiassdeterminaziodiano terrest
maggiore (No attualment
e se la Terracausa dell’urere, una for
olarità e che suoi compon
Terra è megzione della fo
la superficierrenti ed effe
azioni di Geo
poli, indicatova a 1/200.
o, Bessel riusse minore a one sempre ptre ma solo
ord) 6’378,3te valido è 1/
a non avesseuguale gravitrma ellissoid
non è rapprnenti.
glio rappreseorza di gravit
e che meglioetti meteoro
omatica I
o come il
scì (1841) 6’355,10 più preci‐con l'im‐
388 km e /298,25.
e avuto il tà in ogni ale.
resentata
ntata dal tà.
o descrive ologici) e,

Esercitazioni di Geomatica I
DRM | Sistemi di riferimento geodetici 13
Il Geoide è definibile come la superficie equipotenziale (in cui, cioè, il potenziale gravitazionale ha valore uguale) che presenta i minimi scostamenti dal livello medio del mare.
Figura 8 ‐ Campo gravitazionale terrestre
3.2 Sistemi di riferimento Un sistema di riferimento è un modo di descrivere numericamente lo spazio che si realizza fissan‐
do una legge che associa ai punti dello spazio i numeri reali che ne caratterizzano la posizione.
Dovendo descrivere la superficie della Terra e gli oggetti ivi posizionati, si utilizzerà quindi un si‐stema di riferimento che descrive matematicamente la superficie della Terra.
In pratica, per quanto visto precedentemente sulla forma della Terra, come superficie di riferimen‐to si utilizzano delle superfici differenti a seconda dello scopo richiesto.
Queste superfici sono descritte dalle seguenti relazioni matematiche:
Piano:
ax + by +cz + d= 0
Sfera:
x2 + y2 + z2 + ax + by +cz + d= 0
Ellissoide:
0
Geoide:
dove:
∑ ∑ potenziale gravitazionale
potenziale centrifugo
Esercitazioni di Geomatica I
14 Sistemi di riferimento geodetici | SUPSI‐DACD
| || | | |
nelle quali:
1 funzioni associate di Legendre
2 1 polinomi di Legendre
√2 cos 00 0√2 sen | | 0
, coefficienti di Stokes
rPQ : distanza tra il punto Q ed il punto P in cui si valuta il potenziale
dmQ : elemento di massa della Terra posto in Q
G : costante gravitazionale universale (6.67 10‐11)
w : velocità angolare di rotazione della Terra (7.292155 10‐5 rad/s)
Per poter scegliere il sistema di riferimento più opportuno è necessario fare alcune considerazioni:
1. Il geoide è la superficie che meglio approssima la vera superficie della Terra ma è espresso da una formulazione matematica estremamente complicata da trattare. Ha inoltre il pre‐gio di avere la verticale alla superficie coincidente con la direzione di gravità misurabile da un filo a piombo.
2. L’ellissoide di rotazione approssima in maniera soddisfacente il geoide ed è espresso da un’equazione relativamente semplice. Per contro la verticale sull’ellissoide non coincide in genere con la verticale fisica (direzione di gravità) e quindi difficilmente misurabile.
3. La sfera offre una formulazione matematica semplice, sulla quale è possibile applicare la trigonometria sferica. Di conseguenza i calcoli di angoli e distanze risultano più agevoli. Per contro, questa superficie offre un’approssimazione accettabile solo per porzioni di super‐ficie Terrestre di limitata estensione.
4. Il piano è la rappresentazione matematica più semplice ed agevola notevolmente il calcolo poiché in questo caso è possibile utilizzare la trigonometria piana. Per contro questa su‐perficie offre un’approssimazione accettabile solo su porzioni di superficie terrestre e‐stremamente limitate (nell’ordine di chilometri)
3.3 Sistemi di coordinate Esistono diverse tipologie di sistemi di coordinate utilizzabili per descrivere la posizione di un pun‐
to sulla superficie di riferimento:
• le coordinate geografiche, • le coordinate geografiche ellissoidiche • le coordinate cartesiane geocentriche, • le coordinate geodetiche polari, • le coordinate geodetiche ortogonali, e • le coordinate cartesiane locali su un piano di proiezione

Eserci
3.3.1 C
Le coomeridianper i Pol
Meridian
Parallelo
Equatore
Longitudsume va
Latitudintivi verso
3.3.2 C
La def
Si diff
Si notl’ellissoid
Si def
Meridian
Parallelo
Equatore
itazioni di Ge
Coordinate
ordinate geoni, paralleli, ui. Si definisco
no: intersezi
o: intersezion
e: particolar
dine ( ): anglori positivam
ne ( ): angoo nord (da 0°
Coordinate
finizione di c
ferenziano ne
ti infine comde non passa
iniscono qui
no: intersezi
o: intersezion
e: particolar
eomatica I
e geografich
ografiche in qun punto di ono quindi:
one della sfe
ne della sfer
e parallelo in
golo misuratomente verso
olo formato d° a +90°) e ne
e geografich
coordinate ge
ella notazion
me la norma per il centr
ndi:
one della sfe
ne della sfer
e parallelo in
he
questo caso origine situa
era di riferim
a di riferime
ndividuato d
o sull’equatoo est (da 0° a
dalla normaleegativi verso
Figura 9 ‐ Coo
he ellissoid
eografiche s
ne e si indica
ale alla supro di riferime
era di riferim
a di riferime
ndividuato d
DRM
sono esprimato al centro
mento con un
ento con un p
a un piano p
ore a partire +180°) e neg
e alla sfera co sud (da 0° a
ordinate Geogr
diche
ull’ellissoide
la longitudi
perficie, a diento.
mento con un
ento con un p
a un piano p
M | Sistemi d
mibili da un sdella Terra,
n piano passa
piano perpen
passante per
dal meridiangativamente
con il il pianoa ‐90°).
rafiche sulla sfe
è pressoché
ne con Λ e la
ifferenza de
n piano passa
piano perpen
passante per
di riferimento
sistema di rifed un asse d
ante per i po
ndicolare all’
l’origine.
no di Greenwe verso Ovest
o equatoriale
era
é identica a q
a latitudine c
el caso di su
ante per i po
ndicolare all’
l’origine.
o geodetici
ferimento dedi rotazione
oli.
’asse dei pol
weech (Londt (da 0° a ‐18
e. Assume va
quella per la
con Φ.
uperficie sfe
oli.
’asse dei pol
15
efinito da passante
i.
ra). As‐80°).
lori posi‐
sfera.
erica, per
i.

16
Longitudsume va
Latitudinpositivi v
Quota e
3.3.3 C
Le coomassa dpiano eq
Sistemi
dine ( ): anglori positivam
ne ( ): angoverso nord (d
llissoidica (h
Coordinate
ordinate cartella terra, asquatoriale, ed
di riferimen
golo misuratomente verso
olo formato dda 0° a +90°)
h): la distanza
F
e cartesiane
tesiane geocsse Z coincidd asse X pass
nto geodetici
o sull’equatoo est (da 0° a
dalla normal) e negativi v
a lungo la no
Figura 10 ‐ Coo
e geocentri
centriche utidente con l’asante per il m
Figura 11 ‐ Coo
| SUPSI‐DAC
ore a partire +180°) e neg
e all’ellissoidverso sud (da
ormale all’ell
ordinate geogra
che
lizzano un siasse polare mmeridiano di
ordinate cartes
CD
dal meridiangativamente
de con il il pia 0° a ‐90°): S
lissoide.
afiche sull'elliss
stema di coomedio di rot Greenwich.
siane geocentri
Esercita
no di Greenwe verso Ovest
ano equatorSi noti che no
soide
ordinate conazione terre
iche
azioni di Geo
weech (Londt (da 0° a ‐18
riale. Assumeon passa per
n origine nel stre, piano X
omatica I
ra). As‐80°).
e valori r il centro
centro di XY pari al

Eserci
3.3.4 C
Le coopuò quin
Introdbreve pe
Da unpunti chquindi es
• •
3.3.5 C
Questno la pos
• •
itazioni di Ge
Coordinate
ordinate geondi indicare l
duciamo quier congiunge
n punto di vhe ha semprsprimere la p
s, distanz, azimut
Coordinate
te coordinatsizione di un
X: lunghezY: lunghez
eomatica I
e geodetich
odetiche polla posizione
ndi il concetere due punti
vista matemre la normaposizione di
a polare: lunt = angolo or
e geodetich
e si basano n punto tram
zza dell’arcozza dell’arco
e polari
lari sono esprispetto a qu
tto di linea i
atico la geole coincidenun punto P s
nghezza dell’rario tra il me
Figura 12 ‐
e ortogona
sugli stessi cite X e Y così
o di meridian di geodetica
Figura 13 ‐ Co
DRM
presse in funuesta origine
geodetica: i
odetica si dente con la nsu di una sup
’arco di geoderidiano per
Coordinate ge
ali
concetti delleì definite in r
o OQ a QP ortogon
oordinate geod
M | Sistemi d
nzione di une utilizzando
il percorso s
efinisce comeormale alla perficie in rif
detica OP O e la geode
odetiche polar
e coordinaterelazione alla
nale in Q al m
detiche ortogon
di riferimento
punto O suil concetto d
sulla superfic
e quella linesuperficie eerimento ad
etica OP
i
e geodetichea Figura 12:
meridiano pe
nali
o geodetici
u di una supedi angoli e di
cie di riferim
ea congiungeellissoidica. Pd O indicando
e polari, ma
er O
17
erficie. Si stanze.
mento più
ente due Possiamo o:
descrivo‐

18
3.3.6 C
Le cooun punto
Le coodefinisco
• • • •
Si notpiano EN
Sistemi
Coordinate
ordinate su do di tangenza
ordinate carono quindi u
piano EN:asse N: taasse E: taasse h: lu
ti che h, in qN e non dall’e
di riferimen
e cartesiane
di un piano da tra un ellis
tesiane locana terna di a
: definito dalangente al mngente al pango la vertic
questo caso ellissoide: le
nto geodetici
e locali pian
di proiezionesoide di rifer
li sono quindassi N, E, h co
l piano tangeeridiano perarallelo per Pale al piano
Figura 14 ‐
non è ugualdue coincid
| SUPSI‐DAC
ne
e sono coordrimento ed u
di definite aosì posiziona
ente all’ellissr P0 con direP0 con direzioEN passante
‐ Coordinate ca
le alla quotaono solo nel
CD
dinate cartesun piano.
partire da uata:
soide zione nordone est e per P0
artesiane locali
a ellissoidica, punto di tan
Esercita
siane piane,
un punto P0
, in quanto ingenza P0.
azioni di Geo
misurate a p
su di un ellis
indica la dist
omatica I
partire da
ssoide. Si
tanza dal

Eserci
3.4 AltDa qu
nizione d
Mentquesta v
Ne codirezione
In rife
• • •
•
Per pi
itazioni di Ge
tezze del te
uanto visto indella loro ve
re per l’ellissviene misurat
onsegue che e.
erimento alla
H, quota oH, quota eN, ondulanormale fε, Deviazicale fisica
iccoli valori d
eomatica I
erreno
n relazione articale.
soide, la vertta lungo le li
le quote mi
a Figura 3Figu
ortometrica ellissoidica (azione del gfisica. ione della ve.
di ε possiamo
alle superfici
ticale è misunee di gravit
surate sull’e
Figura 15 ‐ Qu
ura 15, si def
(PP0): altezz(PQ): altezzageoide (P0Q0
erticale (
o assumere:
DRM
di riferimen
rata lungo latà.
ellissoide diff
uote ellissoidich
finiscono qu
za misurata l misurata lu0): differenza
): angolo
M | Sistemi d
nto, ellissoide
a perpendico
feriscono, no
he e ortometric
indi:
ungo la vertngo la normaa di quota t
formato da
di riferimento
e e geoide di
olare alla sup
on solo per v
che
icale fisica suale all’ellissotra geoide e
lla normale
o geodetici
ifferiscono n
perficie, per
valore, ma a
ul geoide. oide. ed ellissoide
ellissoidica e
19
nella defi‐
il geoide,
nche per
lungo la
e la verti‐

Esercitazioni di Geomatica I
20 Sistemi di riferimento geodetici | SUPSI‐DACD
3.5 Sistema Geodetico (Datum Geodetico) È la definizione del modello matematico utilizzato per calcolare le coordinate geografiche.
Si compone dei seguenti elementi:
• Geometria della superficie di riferimento (forma e dimensioni) • Orientamento (posizionamento nello spazio) • Rete di inquadramento (materializzazione del sistema)
3.5.1 Parametri dell’ellissoide
Innanzitutto occorre definire le caratteristiche geometriche della superficie di riferimento, quindi la sua forma e le sue dimensioni.
Nel caso di ellissoide (stragrande maggioranza dei casi), ricordandone l’equazione:
0
e definendo i seguenti parametri dimensionali:
• schiacciamento:
• (Prima) eccentricità: 1
• Seconda eccentricità: 1
dove a è il semiasse maggiore e b il semiasse minore; per definirne la forma si fornisco due valori caratteristici secondo una delle seguenti due opzioni:
1. i valori dei due semiassi (a e b), 2. uno dei due semiassi (a o b), ed uno tra schiacciamento, eccentricità o seconda eccentrici‐
tà (α o e2 o e’2).
Nella pratica si è soliti riferirsi ad una determinata forma di ellissoide, e quindi di parametri, asso‐ciandoci un nome universalmente riconosciuto, si hanno così ad esempio i seguenti ellissoidi:
Ellissoide a [m] b [m] α e2
WGS84 6378137 6356752,314 1/298,257223563 6,694379990 x 10‐3
HAYFORD 6378388 6356911,946 1/297 6,7226700022 x 10‐3
BESSEL 6377397,155 6356078,963 1/299,1528128 6,674372232 x 10‐3
3.5.2 Parametri di Orientamento
Poiché tutte le superfici di riferimento viste non sono altro che un’approssimazione della vera su‐perficie topografica, al fine di definire una relazione con la Terra, dopo aver fissato la geometria di ta‐le superficie occorre darne un orientamento.
Tale orientamento consiste quindi nel definire la posizione della superficie di riferimento rispetto alla Terra e può essere di due tipi:

Esercitazioni di Geomatica I
DRM | Sistemi di riferimento geodetici 21
• Orientamento locale, che accosta la superficie di riferimento (in genere l’ellissoide) alla superficie terrestre in un punto particolare per migliorare localmente (scala nazionale) l’accuratezza del modello.
• Orientamento medio, che accosta la superficie di riferimento alla superficie terrestre in un certo numero di punti in modo da garantire su un ampio territorio (scala continentale) l’accuratezza del modello.
• Orientamento globale, che orienta la superficie di riferimento rispetto al centro della Ter‐ra per garantire un’accuratezza accettabile su scala globale.
Orientamento Locale
1. Si sceglie un punto nel quale si impone che la normale all’ellissoide coincida con la verti‐cale, o, equivalentemente, che le coordinate astronomiche longitudine e latitudine (che definiscono la direzione della verticale) coincidano con le coordinate ellissoidiche longitu‐dine e latitudine (che definiscono la direzione della normale); in altre parole, su quel punto si assume nulla la deviazione della verticale.
2. Definita la direzione della normale in un punto, l’ellissoide non e’ fissato nello spazio, in quanto può ruotare attorno a questa direzione: per bloccare la posizione dell’ellissoide ri‐spetto al geoide, occorre fissare anche il valore di una direzione, dal punto origine ad un altro punto vicino, definendo il valore dell’azimut ellissoidico della direzione; tale azimut ellissoidico viene fatto coincidere con l’azimut astronomico che e’ anch’esso misurabile con metodi astronomici sul terreno.
3. Infine per bloccare movimenti dell’ellissoide lungo la normale (che lascerebbero inalterata la normale e l’azimut della direzione) si può anche fissare la ondulazione del geoide in corrispondenza del punto di orientamento, ovvero lo scostamento altimetrico tra geoide ed ellissoide in corrispondenza del punto d’orientamento.
Figura 16 ‐ Orientamento locale dell'ellissoide
In realtà tradizionalmente il problema altimetrico viene gestito autonomamente da quello plani‐metrico e si assume a quota nota un caposaldo origine connesso altimetricamente al mareografo

Esercitazioni di Geomatica I
22 Sistemi di riferimento geodetici | SUPSI‐DACD
fondamentale e quindi lontano dal punto di emanazione: quest’ultimo di conseguenza verrà ad as‐sumere una quota ben precisa, in relazione al suo dislivello rispetto il caposaldo fondamentale.
Orientamento medio
Se il territorio per il quale si sceglie il Sistema geodetico è vasto, l’orientamento dell’ellissoide di ri‐ferimento su di un punto può determinare elevati scostamenti in altre parti del territorio. Per ridurre l’entità dello scostamento tra le due superfici, l’orientamento dell’ellissoide può essere effettuato considerando più punti del territorio, e imponendo che la posizione assunta rispetto al geoide sia tale che in corrispondenza di quei punti siano minime le deviazioni della verticale (differenza angolare tra geoide ed ellissoide), ad esempio secondo il criterio dei minimi quadrati.
In questo modo si ha una migliore distribuzione delle ondulazioni residue tra geoide ed ellissoide, pur non essendoci nessun punto in cui verticale e normale coincidono.
Si definisce quindi scegliendo:
• un punto di riferimento (spesso punto d’emanazione della rete) e, • fissandone la direzione della normale indicandone una deviazione nota (non più nulla
come nel caso dell’orientamento su un singolo punto).
Orientamento globale
Questi sistemi orientati globalmente sono detti geocentrici in quanto l’origine della terna cartesia‐na solidale con gli assi dell’ellissoide associato viene fatta coincidere col baricentro terrestre.
La definizione del Sistema Geodetico stesso viene fatta fissando rispetto la crosta terrestre la dire‐zione degli assi di una terna cartesiana ortogonale. Si fissa:
• l’origine nel baricentro terrestre (tenendo conto delle masse dell’atmosfera e degli ocea‐ni)
• l’asse Z lungo l’asse di rotazione (direzione riportata ad un valore convenzionale invariabi‐le nel tempo, come ad esempio il CIO o realizzazioni successive)
• il piano XZ coincidente con un piano meridiano di riferimento convenzionale
3.5.3 Rete d’inquadramento
La definizione della forma ed orientamento della superficie di riferimento costituisce un modello geometrico “virtuale” della forma della Terra, cioè è un modello puramente matematico ma non fisi‐camente esistente. Per poter essere accessibile all’utenza in modo che chiunque esegua un rilievo e calcoli le posizioni di punti sia in grado di inserire i risultati del rilievo nel sistema geodetico, tale mo‐dello deve essere materializzato tramite la definizione di una serie di punti (rete di inquadramento) a coordinate note.
A questo scopo vengono misurate e calcolate le posizioni di un insieme di punti a partire da quello di emanazione (o dalla serie di punti che definiscono il sistema geodetico) che costituisce la rete che realizza fisicamente il sistema di riferimento stesso.
Chi esegue il rilievo avrà cura di inserirvi un sufficiente numero di punti già noti nel sistema geode‐tico e di basarsi sulle loro coordinate per ricavare quelle dei punti di nuova misura, che vengono ad essere di conseguenza inseriti nel sistema stesso.

Esercitazioni di Geomatica I
DRM | Sistemi di riferimento geodetici 23
Figura 17 ‐ Rete d'inquadramento svizzera (MN03)
3.6 Sistemi di proiezione Le coordinate cartesiane locali su un piano consentono di utilizzare tutte le proprietà trigonome‐
triche piane semplificando notevolmente i calcoli. Inoltre queste consentono di rappresentare su una carta le posizioni dei punti, dando la possibilità di produrre piani e cartografia di comune utilizzo. Questi due aspetti ne spiegano il largo utilizzo.
Va però considerato che pur essendo coordinate cartesiane piane, queste sono misurate a partire da un punto di tangenza tra una ellissoide di riferimento ed un piano. Fatto che presuppone il pas‐saggio da un sistema di riferimento tridimensionale (ellissoide o sfera) ad un bidimensionale (piano).
Il tipo di trasformazione che consente di passare da un sistema di riferimento a 3 dimensioni ad uno a 2 dimensioni è detto sistema di proiezione.
Va notato come tutti i sistemi di proiezione inevitabilmente portano delle distorsioni, le quali a seconda dello scopo di utilizzo, possono risultare accettabili o meno. Per questo motivo esistono di‐versi sistemi di proiezione che consentono di conservare o controllare alcune proprietà originarie, ma questo sempre a spese di altre.
3.6.1 Classificazione in base alle deformazioni
Diverse proprietà metriche di base possono essere misurate sulla superficie terrestre:
• Aree • Forme • Direzioni • Angoli • Distanze
Sulla base della capacità di conservare o controllare le deformazioni di alcune di queste proprietà metriche di base, è possibile classificare i sistemi di proiezione.
Si individuano così proiezioni:
• Azimutali: conservano le direzioni
Esercitazioni di Geomatica I
24 Sistemi di riferimento geodetici | SUPSI‐DACD
• Conformi: conservano le forme • Equivalenti: conservano le aree • Equidistanti: conservano le distanze • Lossodromiche: trasformano le linee lossodromiche (costante angolo con i meridiani) in
rette
3.6.2 Classificazione in base alla superficie di proiezione
I processi di proiezione presuppongono la definizione di un sistema di riferimento (generalmente sfera o ellissoide) e di un metodo di trasformazione che consenta di trasformare la superfici di riferi‐mento espressa in genere da coordinate geografiche in coordinate cartesiane locali.
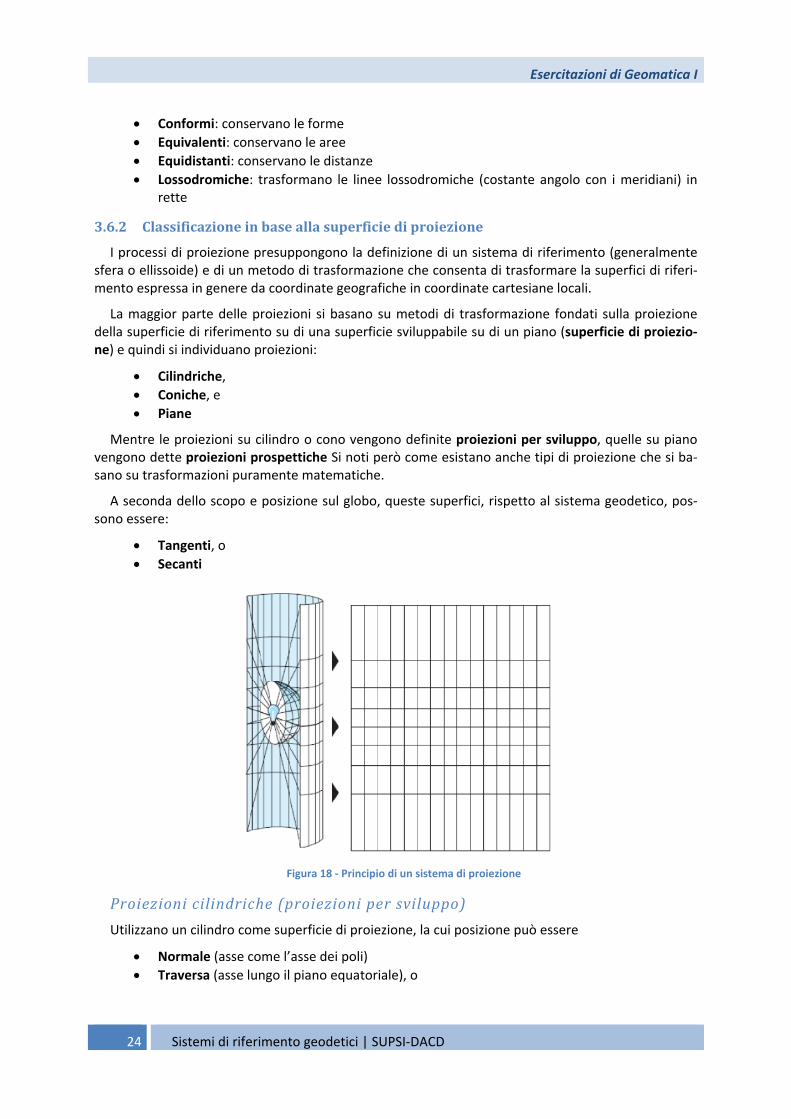
La maggior parte delle proiezioni si basano su metodi di trasformazione fondati sulla proiezione della superficie di riferimento su di una superficie sviluppabile su di un piano (superficie di proiezio‐ne) e quindi si individuano proiezioni:
• Cilindriche, • Coniche, e • Piane
Mentre le proiezioni su cilindro o cono vengono definite proiezioni per sviluppo, quelle su piano vengono dette proiezioni prospettiche Si noti però come esistano anche tipi di proiezione che si ba‐sano su trasformazioni puramente matematiche.
A seconda dello scopo e posizione sul globo, queste superfici, rispetto al sistema geodetico, pos‐sono essere:
• Tangenti, o • Secanti
Figura 18 ‐ Principio di un sistema di proiezione
Proiezioni cilindriche (proiezioni per sviluppo)
Utilizzano un cilindro come superficie di proiezione, la cui posizione può essere
• Normale (asse come l’asse dei poli) • Traversa (asse lungo il piano equatoriale), o

Esercitazioni di Geomatica I
DRM | Sistemi di riferimento geodetici 25
• Obliqua,
Figura 19 ‐ Proiezioni cilindriche
Tra le equazioni cilindriche si ricordano:
Proiezione di Mercatore
• Tipo: È una proiezione cilindrica normale tangente all’equatore (in alcuni casi secante) • Uso: per la navigazione o per mappare regioni equatoriali • Distorsioni:
o ogni linea retta è una lossodromica; o le distanze sono corrette solo all’equatore (linea di tangenza), ma sono ragionevoli
entro i 15°; o le aree e le forme di grandi dimensioni subiscono distorsioni all’allontanarsi
dall’equatore; o forme ed angoli, entro piccole aree sono essenzialmente vere.
• Classe: la proiezione può considerarsi localmente conforme siccome all’interno di ogni piccola area gli angoli e le forme sono essenzialmente vere.
• Note: la proiezione non è prospettica, ad area uguale, o equidistante; fu ideata da Merca‐tore nel 1569.
Figura 20 ‐ Proiezione di Mercatore (fonte USGS)

Esercitazioni di Geomatica I
26 Sistemi di riferimento geodetici | SUPSI‐DACD
Traversa di Mercatore
• Tipo: proiezione cilindrica traversa tangente ad un meridiano (in alcuni casi secante) • Uso: per cartografare paesi allungati in direzione nord‐sud • Distorsioni:
o le distanze sono vere solo lungo il meridiano di tangenza; o le distanze, direzioni, forme ed aree sono ragionevolmente accurate entro 15° del
meridino di tangenza, mentre aumentano rapidamente oltre tale limite; o forme ed angoli, entro piccole aree sono essenzialmente vere
• Classe: la proiezione può considerarsi localmente conforme siccome all’interno di ogni piccola area gli angoli e le forme sono essenzialmente vere
• Note: i paralleli formano una linea retta con il meridiano di tangenza, gli altri meridiano sono linee curve; fu ideata da Lambert nel 1772.
Figura 21 ‐ Proiezione traversa di Mercatore (fonte USGS)
Obliqua di Mercatore
• Tipo: proiezione cilindrica obliqua tangente (o in alcuni casi secante) • Uso: per rappresentare regioni con sviluppo obliquo rispetto ai meridiani o all’equatore • Distorsioni:
o le distanze sono vere solo lungo la linea di tangenza ( le due linee secanti) o le distanze, direzioni, forme ed aree sono ragionevolmente accurate entro 15° dal‐
la linea di tangenza, , mentre aumentano rapidamente oltre tale limite; o ed angoli, entro piccole aree sono essenzialmente vere
• Classe: la proiezione può considerarsi localmente conforme siccome all’interno di ogni piccola area gli angoli e le forme sono essenzialmente vere
• Note: l’equatore e gli altri paralleli sono linee curve complesse concave verso il polo più vicino, i due meridiano a 180° dalla linea di tangenza sono linee rette, mentre gli altri sono linee concave verso tale linea di tangenza. Sviluppata tra il 1900 ed il 1950 da Rosenmund, Laborde, Hotine ed altri.

Esercitazioni di Geomatica I
DRM | Sistemi di riferimento geodetici 27
Figura 22 ‐ Proiezione obliqua di Mercatore (fonte USGS)
Proiezioni coniche (proiezioni per sviluppo)
Utilizzano un cono come superficie di proiezione, tangente o secante.
Figura 23 ‐ Proiezioni coniche
Tra le più diffuse si ricordano:
Conica di Albers
• Tipo: proiezione conica secante su due paralleli • Uso: per cartografare paesi grandi che si sviluppano principalmente in direzione est‐ovest
e sono posti verso le estremità nord o sud del globo. • Distorsioni:
o le aree cono mantenute proporzionali alle dimensioni vere;

Esercitazioni di Geomatica I
28 Sistemi di riferimento geodetici | SUPSI‐DACD
o le direzioni sono ragionevolmente accurate in aree limitate; o le distanze sono vere su entrambi i paralleli di intersezione; o le forme si distorgono maggiormente all’allontanarsi dalle linee secanti.
• Classe: la proiezione è equivalente ma né conforme, né prospettica, né equidistante. • Note: fu presentata da H. C. Albers nel 1805.
Figura 24 ‐ Proiezione conica di Albers (fonte USGS)
Conica di Lambert
• Tipo: proiezione conica secante su due paralleli • Uso: per cartografare paesi grandi che si sviluppano principalmente in direzione est‐ovest
e sono posti verso le estremità nord o sud del globo. • Distorsioni:
o le aree si distorgono maggiormente all’allontanarsi dalle linee secanti; o le direzioni sono ragionevolmente accurate in aree limitate; o le distanze sono vere su entrambi i paralleli di intersezione; o le forme di piccole aree a grandi scale sono essenzialmente esatte;
• Classe: la proiezione è conforme ma nè equivalente, nè prospettica, nè equidistante. • Note: fu presentata da Lambert nel 1772.
Figura 25 ‐ Proiezione conica di Lambert (fonte USGS)

Esercitazioni di Geomatica I
DRM | Sistemi di riferimento geodetici 29
Proiezioni piane (proiezioni prospettiche)
Le proiezioni piane utilizzano la proiezione della superficie di riferimento su di un piano a partire da un centro di proiezione.
Si distinguono proiezioni:
• polari, • equatoriali, od • oblique
a seconda della posizione del punto di tangenza.
Inoltre a secondo del centro di proiezione, si distinguono proiezioni:
• gnomoniche, • stereografiche, ed • ortografiche
a seconda che questo sia posto nel centro della superficie di riferimento, nel punto opposto a quello di tangenza, od all’infinito.
Figura 26 ‐ Proiezioni piane
Stereografica polare
• Tipo: proiezione prospettica • Uso: per cartografare le aree ai poli, o sopra gli 80°. • Distorsioni:

Esercitazioni di Geomatica I
30 Sistemi di riferimento geodetici | SUPSI‐DACD
o le sono vere solo dal dal punto di tangenza; o la scala cresce all’allontanarsi dalla tangenza; o la aree e le forme grandi si distorgono maggiormente allontanandosi dal punto di
tangenza. • Classe: la proiezione è conforme e prospettica ma nè equivalente, nè equidistante. • Note: risale al secondo secolo B.C, la si attribuisce ad Hypparco.
Figura 27 ‐ Proiezione stereografica (fonte USGS)
















