Embed Size (px)
Citation preview

12 Verkleinerung der Steuerblindleistung
Übungsziele:
• Steuerblindleistung
• Kommutierungsblindleistung
• Folgesteuerung
• Halbgesteuerte Brücke
• Freilauf
Übungsdateien:
MATHCAD: b6.mcd; b6folg.mcd; b6h.mcd; leifak.mcd SIMPLORER: m3rl.ssh; m3rlfd.ssh; b6rl.ssh; b6hrl.ssh; b6rlfd.ssh
12.1 Steuerblindleistung
Der Vorteil, eine veränderbare Gleichspannung durch einen steuerbaren Gleich-richter zu erhalten, muss mit dem Nachteil einer erhöhten, vom Steuerwinkel ab-hängigen Blindleistungsaufnahme bezahlt werden, die zusätzlich zur Verzerrungs-blindleistung vom Netz geliefert werden muss.
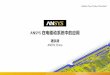
Bild 12.1: Steuerblindleistung
ϕ1 = α = 60°
ϕ1 = α = 0°
x
x

12.1 Steuerblindleistung 173
In der idealisierten Stromrichtertheorie mit den Voraussetzungen idealer Glättung (Ld → ∞) und starrem Versorgungsnetz (Lk = 0) gilt, dass die Grundschwingungs-blindleistung Q1α gleich der Steuerblindleistung ist. Sie bildet sich durch Verschie-bung der Grundschwingung des Leiterstromes iL1 gegenüber der Netzspannung uS. In Bild 12.1 sind die Stromgrundschwingungen im Verhältnis zur Versorgungs-spannung einer M3-Schaltung bei α = 0° und α = ϕ1 = 60° gegenübergestellt. Die Grundschwingung verschiebt sich mit dem Steuerwinkel um den gle ichen Betrag.
Im gesteuerten Bereich entspricht die Wirkleistung auf der Gleichstromseite der Grundschwingungswirkleistung Pdα = Udiα Id = Udi Id cos(α) = P1 auf der Netzseite des
Stromrichters. Die Grundschwingungsblindleistung beträgt Q1α = Udi Id sin(α). Da
der Phasenwinkel ϕ1 zwischen der Stromgrundschwingung und der Netzspannung
dem Steuerwinkel α entspricht, gilt mit α = ϕ1 entsprechend cos(α) = cos(ϕ1). Die
starre Verbindung zwischen der Gleichspannung Udiα und dem Verschiebungsfaktor cos(ϕ1) ist charakteristisch für netzgeführte Stromrichter bei idealer Glättung.
( ) ( ) ( )[ ]
1
1
cossin
2
di
diá
2
ddi
á1
2
ddi
dá
2
ddi
á1
222ddi
2dá
2á1
=
+
=
+
++=+
U
U
IU
Q
IU
P
IU
Q
IUPQ αα
(12.1)
Aus diesen Beziehungen folgt die Gleichung eines Kreises [s. Gleichung (12.1)] mit dem Mittelpunkt im Koordinatenursprung und dem Radius R = 1. Netzge führ-te Stromrichter nehmen im gesteuerten Betrieb Blindleistung auf. Sie wirken in-duktiv und arbeiten nur im ersten und zweiten Quadranten (Bild 12.2), wogegen selbstgeführte Stromrichter auch im dritten und vierten Quadranten des Leistungs-dia gramms betrieben werden können und deshalb Blindleistung abgeben. Sie wir-ken kapazitiv. Im ersten Quadranten wird Wirkleistung verbraucht. In Abhängig-keit vom Steuerwinkel zeigt das Diagramm sowohl das Leistungs verhältnis als auch das Spannungsverhältnis als Funktion der Blindleistung an. Sie ist auf die un-gesteuerte Wirkleistung bezogen. Der zweite Quadrant ist nur durch den Genera-torbetrieb erreichbar. Dabei kann Energie entweder über die Motorwelle eingegeben werden oder sie wird beim Bremsen von der Schwungmasse der Maschine gelie-fert.
Wenn z.B. Gleichstrommotoren über gesteuerte Gleichrichter bei α = 90° angefah-ren werden, wird Blindleistung in Höhe der Nennleistung aufgenommen. Das ist wirtschaftlich nicht tragbar. Deswegen wird die Blindleistung entweder dynamisch durch Umrichter kompensiert oder es werden Schaltungen eingesetzt, die Blind-leistung besonders im Anfahrbereich einsparen.

12 Verkleinerung der Steuerblindleistung 174
Bild 12.2: Ortskurve der Steuerblindleistung
12.2 Die Kommutierungsblindleistung
Wenn am Anschlusspunkt des Gleichrichters eine Kommutierungsinduktivität Lk wirkt, muss Gleichung (12.2) beachtet werden. Die Voraussetzung α = ϕ1 gilt nicht mehr.
( ) ( ) x1 coscos d−= αϕ (12.2)
Der relative induktive Gleichspannungsabfall dx ist der prozentuale Wert des Gleichspannungsabfalls an der Kommutierungsinduktivität, bezogen auf die unge-steuerte Gleichspannung Udi. Der Verschiebungsfaktor der Grundschwingung cos(ϕ1) wird kleiner, da sich ϕ1 des Leiterstromes durch die Kommutierungs induk-tivität zusätzlich vergrößert. Die Blindleistungsaufnahme des Gleichrichters steigt an. Schon bei Vollsteuerung (α = 0°) wird ein kleiner Blindleistungsanteil aufge-nommen. Der Gleichrichter benötigt zusätzliche Kommutierungsblindleistung.
( )( ) ( )( )( ) ( )[ ]ü
üüPQ
PQ
+−+−+=
=
αααα
α
coscos4
2sin2sin2
wirdsinAus
dá1
dá1
(12.3)
Die Steuer- und die Kommutierungsblindleistung berechnen sich gemeinsam nach Gleichung (12.3). Bei gesteuerten Gleichrichtern sind beide Blindleistungen nicht getrennt zu bestimmen.
( )( )[ ]0
00dá1 cos14
2sin2
ü
üüPQ
+−
= (12.4)

12.3 Folgesteuerung 175
Da bei Vollsteuerung ü = ü0 die Steuerblindleistung verschwindet, kann die Kom-mutierungsblindleistung allein durch Gleichung (12.4) bestimmt werden. Der Ausdruck nach Gleichung (12.3) vereinfacht sich zur Gleichung (12.4), die den Betriebsfall ohne Steuerblindleistung mit alleiniger Aufnahme der Kommutie -rungsblindleistung beschreibt.
( )( )
( )( )[ ]
( )( )( )
−−=
−−==
0
001
0
00
11
11
d
1
cos14
2sin2arctan
cos14
2sin2
cos
sin
ü
üü
ü
üü
S
S
P
Q
ϕ
ϕϕ
(12.5)
Mit Gleichung (12.5) lässt sich die Phasenverschiebung ϕ1 der Grundschwingung des Leiterstromes zur Spannung in Abhängigkeit vom Überlappungswinkel ü0 be-rechnen.
Näherungsweise kann Gleichung (12.5) durch ϕ1 ≈ ü0/2 mit ausreichender Genau-igkeit ersetzt werden.
12.3 Folgesteuerung
Durch die in Folgesteuerung betriebene Drehstrombrückenschaltung kann die Steuerblindleistung vermindert werden. Die bekannte Schaltungsanordnung der Brücke bleibt erhalten; es wird nur die Steuerung geändert.
Die Drehstrombrücke wird in Bild 12.3 aus zwei gleichstromseitig in Reihe ge-schalteten M3-Schaltungen aufgebaut, dem Teilstromrichter I und dem Teilstrom-richter II. Die Aussteuerung beginnt mit dem Stromrichter I durch Vergrößern von αI.. Der Stromrichter II arbeitet so lange in Vollsteuerung, bis αI die Trittgrenze bei αImax = 180° – γ erreicht hat.
Sobald der Teilstromrichter I an der Wechselrichtertrittgrenze arbeitet, kann der Teilstromrichter II ebenfalls ausgesteuert werden, um den Gleichrichter in den Quadranten für den Wechselrichterbetrieb zu bringen, falls dies erforderlich ist.
Bild 12.4 zeigt die Ortskurven der Teilstromrichter I und II im Vergleich mit der normalen gesteuerten Brückenschaltung. Die maximale Blindleistungsaufnahme entspricht der halben Blindleistung einer normal ausgesteuerten Brücke. Im An-fahrpunkt der Gleichstrommaschine mit der Gleichspannung Udiα = 0 V ist die Blindleistung in diesem Fall Null, während sie sonst der maximalen Wirkleistung entspräche.

12 Verkleinerung der Steuerblindleistung 176
Bild 12.3: Folgesteuerung
Bild 12.4: Blindleistungsortskurve bei Folgesteuerung
Bezeichnet man die Gleichspannungsmomentanwerte der Teilstromrichter bei Aus-steuerung α mit udiα I und udiα II beträgt die Gleichspannung an der Last:
udiα = udiα I − udiα II

12.4 Die halbgesteuerte Brückenschaltung B6H 177
Die Steuerkennlinie für den nicht lückenden Betrieb setzt sich aus zwei Teilab-schnit ten zusammen.
( )[ ]
( ) ( )[ ] axImIIImaxIIIIaxImdi
áIIdi
0IIaxImII
di
áIdi
und0coscos2
1
0und01cos2
1
αααααα
αααα
=≤≤+=
=≤≤+=
U
U
U
U
(12.6)
Die in Bild 12.4 gezeigten halbkreisförmigen Ortskurven der Steuerblindleistung werden durch die Einflüsse endlicher Kommutierungs induktivitäten Lk und der Wechselrichtertrittgrenzen γ in ihrer Lage verändert. Das Beispiel in Bild 12.5 zeigt eine übertriebene Veränderung, um die Unterschiede zur idealisierten Dar-stellung zu verdeutlichen.
Bild 12.5: Einfluss der Kommutierung und der Wechselrichtertrittgrenze
12.4 Die halbgesteuerte Brückenschaltung B6H
Die ha lbgesteuerte Brückenschaltung ist ein Sonderfall der Folgesteuerung (Bild 12.6). Wenn kein Wechselrichterbetrieb erforderlich ist, kann der Teilstrom-richter II immer in Vollsteuerung bei αII = 0° betrieben werden. Die steuerbaren Ventile werden deswegen durch billigere Dioden ersetzt, da eine Steuerung des Stromrichters II nicht mehr erforderlich ist. Diese Schaltung lässt nur motorischen Betrieb zu. Eine Energie rückspeisung im Generatorbetrieb ist nicht möglich.

12 Verkleinerung der Steuerblindleistung 178
Bild 12.6: Halbgesteuerte Brücke B6H
Bild 12.7: Spannung und Strom der B6H-Schaltung (α < 60°)
Bei Vollsteuerung und idealer Glättung (Ld → ∞) fließen in den beiden Brücken-hälften Ventilströme, die sich aus rechteckigen Blöcken mit der Stromführungs-dauer τd von 120° zusammensetzen.
Bei endlicher Glättung besteht ein Ventilstromblock aus zwei deutlich vonein-ander abgegrenzten, unsymmetrischen Abschnitten A und B. In Bild 12.7 ist der entsprechende Spannungs- und Stromverlauf für den Steuerbereich 0 ≤ α ≤ π/3
Teilgleich-richter II
Teilgleich-richter I
ud Gleichspannung
iV1 Ventilstrom
iV6 Ventilstrom
iV2 Ventilstrom
id Gleichstrom
iL Leiterstrom
τd = 120°

12.4 Die halbgesteuerte Brückenschaltung B6H 179
dargestellt. In diesem Steuerbereich hat der Leiterstrom noch den typischen Ver-lauf mit 120° Stromführungsdauer. Die Gleichspannung ud ist unsymmetrisch.
Um die Ventilströme mathematisch zu berechnen und mit MATHCAD zu bearbei-ten, werden die Gleichungen für den ohmsch-induktiven Lastfall bei endlicher Glättungsinduktivität angegeben. Die Stromfunktionen folgen wie bei den Mitte l-punktschaltungen als Lösung der Differenzialgleichungen, die aus Spannungs-gleichgewichtsbedingungen aufgestellt werden. Man muss zwei Steuerbereiche unterscheiden, den für α ≤ 60° und den Bereich für α ≥ 60°.
Als Ergebnis entsteht im Intervall 0 ≤ α ≤ π/3 die Gleichung (12.7):
( )
( )
)cot(undmit
e
e1
3
ðsinsin
6
ðcos6)(
e
e1
3
ðsinsin
6
ðcos6)(
d2d
22
3
ð2VB
3
ð2VA
ϕω
ρω
αϕϕ
αϕϕ
ρρ
ρρ
==+
=
−
−−
+
−−=
−
+−
+
−+=
−
−
−
−
L
R
LR
UI
xIxi
xIxi
S
x
x
(12.7)
Im Grenzfall α = π/3 = 60° erreicht ud die Nulllinie. Bei weiterer Aussteuerung lückt die Spannungskurve. Ihre Augenblickswerte können nicht negativ werden, auch wenn ein genügend großer Glättungsspeicher Ld vorhanden ist. Die idealen Dioden lassen keinen Spannungsabfall in Durchlassrichtung zu; die Last wird bei α ≥ 60° durch die Dioden kurzgeschlossen.
In diesem Bereich beziehen die Dioden keine Energie aus dem Netz. Sie wird al-lein vom Speicher bereitgestellt, der über die Dioden und den Lastwiderstand kurzgeschlossen ist. Der Freilaufbereich ist in Bild 12.9 grau unterlegt. Die Strom-führungsdauer im Leiterstrom wird im Freilaufbereich τd ≤ 120°. Die zweite For-mel der Gleichung 12.8 zeigt den Verlauf des Ventilstromes ohne die zeitabhän-gige cos-Komponente. Der Stromverlauf wird allein durch den induktiven Spei-cher und den ohmschen Lastwiderstand bestimmt und nach einer e-Funktion ent-laden. Der Freilauf ist beendet, sobald der Speicher entladen ist oder ein folgender Schaltzustand den Speicher erneut lädt.

12 Verkleinerung der Steuerblindleistung 180
Für das Intervall π/3 ≤ α ≤ π ergeben sich die folgenden Ventilströme:
( ) ( )
( ) ( )
)cot(undmit
e
e1
esinsin6)(
e
e1
esinsin
6
ðcos6)(
d2d
22
3
ð2
3
ð2
3
ð
VB
3
ð2
3
ð
VA
ϕω
ρω
ϕαϕ
ϕαϕϕ
ρ
ρ
αρ
ρρ
αρ
==+
=
−
−−=
−
−−+
−+=
−−
−
−
−
−
−
L
R
LR
UI
Ixi
xIxi
S
x
x
(12.8)
Mit der B6H-Schaltung ist kein Wechselrichterbetrieb durchführbar. Die Steuer-kennlinie Udiα/Udi =f(α) liegt nur im positiven Bereich. Da die Strangspannung US bei Brückenschaltungen meist nicht zugänglich ist, wird die Leiterspannung UL zur Berechnung der Gleichspannung Udi verwendet.
Die Steuerkennlinie der B6H-Brücke (Bild 12.8) im Vergleich zur B6-Brücke be-rechnet sich nach Gleichung (12.9):
[ ] LSdidi
ádi 2ð
32
ð
33mit)cos(1
2
1UUU
U
U==+= α (12.9)
Bild 12.8: Steuerkennlinie der B6H-Brücke
Die Spannungs- und Stromverläufe für α ≥ 60° in Bild 12.9 zeigen einen Ventil-stromanteil B, der nicht aus dem Netz gedeckt ist. Er hebt sich im Leiterstrom auf. Mit wachsender Aussteuerung verkürzen sich die Blöcke des Leiterstroms, weil der Freilaufbereich zunimmt.

12.5 Blindleistungseinsparung durch Freilaufdioden 181
Bild 12.9: Spannung und Strom der B6H-Schaltung (α ≥ 60°)
12.5 Blindleistungseinsparung durch Freilaufdioden
Die Freilaufwirkung wurde bereits im vorigen Abschnitt erklärt. Durch den Ein-satz von Dioden kann grundsätzlich Blindleistung in gewissen Abschnitten des Steuerbereichs eingespart werden. Am Beispiel einer M3-Schaltung mit idealer Glättung (Ld → ∞) wird die Wirkung der Freilaufdiode FD erklärt.
Wird eine Diode parallel zur Last geschaltet, leitet sie, wenn negative Spannungs-augenblickswerte anliegen und schließt die Last kurz. Die Lastspannung bricht zusammen. Obwohl in unserem Beispiel ideale Glättung vorausgesetzt wird, kann die Spannung nicht negativ werden. Sie verhält sich so, als ob kein Speicher vor-handen wäre. Nur der Strom behält die durch den Speicher bedingte Rechteckform (Bild 12.11).
Bild 12.10: M3-Schaltung mit Freilaufdiode
Die Freilaufwirkung der Diode setzt erst beim Überschreiten des Steuerwinkels αmax = π/2 – π/p ein.
ud Gleichspannung iV2 Ventilstrom
iV1 Ventilstrom
iV4 Ventilstrom
id Gleichstrom
iL Leiterstrom aus dem Netz
aus dem Speicher
τd < 120°

12 Verkleinerung der Steuerblindleistung 182
Im Bereich 0 ≤ α ≤ π/2 − π/p gilt für die Steuerkennlinie aus der idealisierten Stromrichtertheorie ohne Freilaufdiode [s. Gleichung (12.10)]:
)cos(di
diá α=U
U (12.10)
Im Bereich π/2 π/p ≤ α ≤ π/2 + π/p verhält sich die Spannung so, als ob rein ohm-sche Last vorliegen würde. Die Steuerkennlinie ergibt sich aus:
+−
=
−−
=
p
p
p
p
U
U
ðsin2
ðcos1
ðsin2
ðsin1
di
diá
αα (12.11)
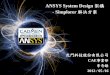
Bild 12.11: Strom und Spannung der M3-Schaltung mit Freilaufdiode
Bild 12.12: Blindleistungsdiagramm der M3-Schaltung mit Freilaufdiode
udiα α = 60° udiα
uS1
x
x
x
x
x
iV
iV
iV
iFD
Id Ventilstrom iV1
Ventilstrom iV2
Ventilstrom iV3
Strom über Freilaufdiode

12.6 Steuerkennlinien und Leistungsfaktoren 183
Es fehlt die grau unterlegte Fläche, weil in diesem Bereich die Freilaufdiode den Strom übernimmt und die Last kurzschließt. Durch die fehlende Spannungszeitflä-che steigt der arithmetische Mittelwert der Gleichspannung gegenüber dem Be-trieb ohne Freilaufdiode an. Bild 12.13 zeigt diesen Effekt, beim Vergleich der Steuerkennlinien.
Aus dem Beispiel der M3-Schaltung (Bild 12.12) kann die Einsparung der Blind-leistung im Bereich α ≥ 30° entnommen werden. Nur dort wirkt die Freilaufdiode.
Die Ortskurve der Blindleistungen lässt sich durch zwei Kreisabschnitte beschrei-ben. Bis α ≤ 30° folgt die Kennlinie dem Kreis mit dem Mittelpunkt im Koordina-tenursprung und für α ≥ 30° ist die Kreisgleichung durch Gleichung (12.12) gege-ben.
22
di
diá
2
ddi
á1
ðsin2
1
ðsin2
1
=
−+
pp
U
U
IU
Q (12.12)
Es handelt sich bei Gleichung (12.12) um einen Kreis, dessen Mittelpunktskoordi-nate für die M3-Schaltung mit p = 3 aus Gleichung (12.13) folgt.
= OM ,
3
1 mit 577,03
1==R (12.13)
Es ist kein Wechselrichterbetrieb möglich. Das Blindleistungsdiagramm (Bild 12.12) liegt im 1. Quadranten.
12.6 Steuerkennlinien und Leistungsfaktoren
Beim Vergleich der Steuerkennlinien (Bilder 12.12 und 12.13) ist zu beachten, dass bezogene arithmetische Mittelwerte der Gleichspannungen über dem Steuer-winkel aufge tragen sind. Gle iche Steuerkennlinien sagen nichts über die wirkliche Spannungshöhe und die Schaltung aus. Vollsteuerbare Schaltungen ohne Freilauf-verhalten folgen alle unter den oben genannten idealen Glättungsbedingungen der cos-Kennlinie.

12 Verkleinerung der Steuerblindleistung 184
Bild 12.13: Steuerkennlinien der M-Schaltungen
Mit den Randbedingungen einer ideale Glä ttung (Ld → ∞) und ohne Berück-sichtigung der Kommutierungsinduktivität (Lk = 0) sowie der Wechselrichtertritt-grenze (γ = 0) lassen sich die mathematische Formulierungen in Tabelle 12.1 für die Steuerkennlinien Udiα/Udi = f(α) und die jeweiligen Leistungsfaktoren λ = f(α) zum Vergleich und zur Überprüfung der Simulationen angeben. Die Grafiken sind mit der MATHCAD-Datei leifak.mcd berechnet worden.
Bild 12.14: Steuerkennlinien der B-Schaltungen
Um die Schaltungen hinsichtlich ihrer Blindleistungsaufnahme miteinander zu vergleichen, sind die Leistungs faktoren λ(α) über dem Steuerwinkel oder über der bezogenen ausgesteuerten Spannung Udiα/Udi aufgetragen (Bilder 12.15 und 12.16).
1,0
0,6
0,2
0
-0,2
-0,6
-1,0
Udiα Udi
0° 30° 60° 90° 120° 150° 180° α
M2; M3
M3F M2F
1,0
0,6
0,2
0
-0,2
-0,6
-1,0
Udiα Udi
0° 30° 60° 90° 120° 150° 180° α
B2; B6
B6F
B2F; B6H

12.6 Steuerkennlinien und Leistungsfaktoren 185
Bild 12.15: Leistungsfaktoren der Mittelpunktschaltungen
Halbgesteuerte Schaltungen und Schaltungen, bei denen eine Freilaufdiode hinzu-gefügt wurde, weichen erst nach einem bestimmten Steuerwinkel von dieser idea-len Kennlinie ab. Ähnliche Abweichungen treten auch ein, wenn die Glättungs-verhältnisse nicht ideal sind. Eine Verbesserung des Leistungsfaktors wird durch den Verzicht auf den Wechselrichterbetrieb des Gleichrichters erkauft.
Bild 12.16: Leistungsfaktoren der Brückenschaltungen
1,0
0,6
0,2
0,4
0,2
0
Udiα Udi
0 0,2 0,4 0,6 0,8 1
λ
1,0
0,6
0,2
0,4
0,2
0
Udiα Udi
0 0,2 0,4 0,6 0,8 1
λ

12 Verkleinerung der Steuerblindleistung 186
Tabelle 12.1: Leistungsfaktoren und Steuerkennlinien
Schaltung Bereich Leistungsfaktor λ Steuerkennlinie Udiα/Udi = f(α)
M2; B2 0° ≤ α ≤ 180° )cos(2ð2
α )cos(α
M2F; B2H; B2F 0° ≤ α ≤ 180° ( )
ð1ð
)cos(12
α
α
−
+
2)cos(1 α+
M3 0° ≤ α ≤ 180° ð2
)cos(33 α
)cos(α
M3F 0° ≤ α ≤ 30°
30° ≤ α ≤ 150°
ð65
ð
12ð
2cos6
)cos(3ð23
2
α
α
α
−
+
)cos(α
ð6
5ð
12
ð
2cos2
2
α
α
−
+
B6 0° ≤ α ≤ 180° )cos(ð3
α )cos(α
B6F
0° ≤ α ≤ 60°
60° ≤ α ≤ 120°
ð3
2ð
3ð
cos13
)cos(ð3
α
α
α
−
++
++
3ð
cos1
)cos(
α
α
B6H
0° ≤ α ≤ 60°
60° ≤ α ≤ 180°
ð1ð2
))cos(1(6
2)cos(1
ð3
α
α
α
−
+
+
2)cos(1 α+
12.7 Übungen zum Leistungsvergleich
In diesem Beispiel werden Leistungsdaten der B6-Brücke mit denen der B6H-Brücke verglichen. Sowohl die Eingangsleistungen auf der Wechselspannungssei-te als auch die Ausgangsleistungen auf der Gleichspannungsseite sind simuliert worden. Der Einfluss einer Kommutierungsinduktivität wird vernachlässigt.
Als Eingabe ist eine ohmsch-induktive Last mit R = 170 Ω und Ld = 10 mH ge-wählt. Der Steuerwinkel sei α = 40°.

12.7 Übungen zum Leistungsvergleich 187
In MATHCAD können die Leiterströme und ihre erste Oberschwingung gemein-sam mit der Strangspannung in einem normierten Zeitdiagramm ausgegeben wer-den. Die Spannungen und Ströme sind auf ihre Effektivwerte bezogen. Mit der Datei b6rl.mcd wurde Bild 12.17 und mit b6rlh.mcd Bild 12.18 erstellt. Die Netz-spannung ist als gestrichelte Sinusfunktion dargestellt.
Bild 12.17: Leiterströme und Strangspannung (B6)
Die Grundschwingung des Leiterstroms ist als ausgezogene Sinusfunktion ge-zeichnet. Die ausgezogenen Geraden entsprechen dem Effektivwert des Leiter-stroms IL und der Strangspannung US und die strichpunktierten Geraden zeigen den Effektivwert der Grundschwingung I1L. In der B6-Schaltung wurde beim Aus-druck eine Periode ZP := 1 und bei der B6H-Schaltung zwei Perioden ZP := 2 ge-zeichnet.
Bild 12.18: Leiterströme und Strangspannung (B6H)

12 Verkleinerung der Steuerblindleistung 188
Bild 12.19: Leistungswerte der B6-Schaltung (MATHCAD)
Die mathematische Auswertung in MATHCAD ergibt die Leistungsbilanz. Der Phasenwinkel zwischen der Strangspannung und der Stromgrundschwingung ϕ1 entspricht jetzt nicht mehr dem Steuerwinkel α, weil die Randbedingung der un-endlich guten Glättung nicht mehr eingehalten wurde. Man beachte, dass die Ge-nauigkeit der Ergebnisse von der gewählten Schrittweite der numerischen Lö-sungsverfahren abhängt und nicht von der Stellenzahl der Rechnerausgabe.
In diesem Zusammenhang ist noch auf die Fourier-Analyse des Leiterstroms in der Übungsdatei hinzuweisen, die bei der halbgesteuerten Brücke jetzt zusätzlich ge-radzahlige Anteile hat, was zu einer Verschlechterung des Grundschwingungsge-haltes führt.

12.7 Übungen zum Leistungsvergleich 189
Bild 12.20: Leistungswerte der B6H-Schaltung (MATHCAD)
Mit den gleichen Eingabewerten wie bei MATHCAD wird im SIMPLOER simu-liert und anschließend die Ergebnisse mit MATHCAD in Tabelle 12.2 verglichen. Dazu wurden sowohl der Leiterstrom iL1 als auch die zugehörige Phasenspannung uS1 in eine ASCII-Datei gespeichert, um sie anschließend im Datenanalysepro-gramm DAY auszuwerten.
Obwohl an beiden Schaltungen gleiche ohmsche Widerstände angeschlossen sind, ist die Last nicht identisch, da sie an unterschiedlichen Gleichspannungen Udiα lie-gen und deswegen verschiedene Leistungen umsetzen.
Die Phasenspannung und der Leiterstrom entsprechen den Grafiken in MATH-CAD. Allerdings sind sie jetzt nicht normiert. Der Strom ist um den Faktor 100 vergrößert eingetragen. Es fehlt auch die Stromgrundschwingung, die hier nicht so leicht darzustellen ist. Ströme und Spannungen sind aus den Bildern 12.21 und 12.22 zu entnehmen.
Über die eingebundene Leistungsauswertung in DAY werden die Leistungen pro Strang gezeigt.

12 Verkleinerung der Steuerblindleistung 190
Bild 12.21: Strom und Spannung aus SIMPLORER (B6)
Die Wirkleistung P = Pdα, die Scheinleistung S, die Blindleistung Qα und der Leis-tungsfaktor λ sind aus Bild 12.23 und Bild 12.24 zu entnehmen. Um den Phasen-winkel ϕ1 im SIMPLORER zu ermitteln, muss die Fourier-Analyse sowohl für die Phasenspannung als auch für den Leiterstrom durchgeführt werden. Die Phasen-winkel der Grundschwingung in der Spannung müssen von der des Stromes abge-zogen werden, um den Winkel zu ermitteln. Die Phasenleistungen müssen mit dem Faktor 3 multipliziert werden, um die Drehstromleistung zu erhalten. Die Einhei-ten sind entsprechend hinzuzufügen.
Bild 12.22: Strom und Spannung aus SIMPLORER (B6H)

12.7 Übungen zum Leistungsvergleich 191
Unterschiede, die aus dem Vergleich der Ergebnisse beider Verfahren auftreten, sind auf die verschiedenen Schrittweiten bei der numerischen Integration zurück-zuführen. Die Genauigkeit der Zahlenangaben ist von der Schrittweite der Simu-lation abhängig. Im Vergleich der Ergebnisse aus Bild 12.19 und Bild 12.20 mit Bild 12.23 und Bild 12.24 gibt es Abweichungen in der zweiten Kommastelle. In Tabelle 12.2 sind die Ergebnisse gegenübergestellt.
Bild 12.23: Leistungen aus SIMPLORER (B6)
In DAY gibt es eine Vorschau der Leistung p(t), die hier über eine Periodendauer der Speisespannung von 20 ms vorliegt. Es wurde die Möglichkeit genutzt, mit den Anfangswerten der vorangehenden Simulation weiter zu rechnen, um so den Einfluss der Einschwingvorgänge auszublenden. Die Wirkleistung P ist der arith-metische Mittelwert der Leistungsfunktion.
In diesem Beispiel sieht man, dass die Ergebnisse der Fourier-Analyse in MATH-CAD ausgewertet werden können. Durch die Grenzen mathematischer Beschrei-bung ist die Anwendung von MATHCAD eingeschränkt.
Die Auswirkung schwacher Netze oder der Einfluss verzerrter Spannungen sowie Unsymmetrien auf die Leistungsbilanz können zum Beispiel mit SIMPLORER ein-facher untersucht werden.

12 Verkleinerung der Steuerblindleistung 192
Bild 12.24: Leistungen aus SIMPLORER (B6H)
Tabelle 12.2: Leistungsvergleich
Größe Programm B6 B6H
Eingabedaten: R = 170 Ω; Ld = 10 mH; α = 40°; UL = 400 V
MATHCAD 1,07 kW 1,39 kW Pda
SIMPLORER 30,353 = 1,06 kW 30,4602 = 1,38 kW
MATHCAD 1,42 kVA 1,62 kVA S
SIMPLORER 30,467 = 1,40 kVA 30,534 = 1,60 kVA
MATHCAD 0,93 kvar 0,826 kvar Qα
SIMPLORER 30,303 = 0,91 kvar 30,271 = 0,813 kvar
MATHCAD 0,75 0,86 λ
SIMPLORER 0,75 0,86
Pd 1,32 kW 1,52 kW
Q/Pd 0,78 0,62
Pda/Pd
0,81 0,91