Embed Size (px)
Citation preview
2. Automaatjuhtimissüsteemi kirjeldamine
2.1. Skeemid ja signaalidKõikide süsteemide, s. h. automaatjuhtimissüsteeme, on võimalik kirjeldada süsteemi komponen-tide omavahelise ühendusskeemina ning lisades juurde nende komponentide tehnilised andmed (näiteks veepump, selle tüüp, võimsus, tootlikuskõver jne.). Seda nimetatakse objektipõhiseks kirjeldamiseks. Sellega antakse edasi väga suur hulk informatsiooni staatilise süsteemi kohta, aga ei anna mõista kuidas reguleerimine toimib – kuidas käitub süsteem koormuse hüppelisel muutusel, häiringute esinedes, toite kõikumisel jne.
Samas kirjeldades süsteeme tegevuste läbi (nt. joonis 1.3), kaovad ära küll konkreetsed seadmed, aga asemele tulevad osade vastastikuste mõjude ehk signaalide suunad, mis selgitavad paremini automaatsüsteemi toimimist. Seda nimetatakse funktsioonipõhiseks kirjeldamiseks (täpsustuseks niipalju, et joonis 1.3 on hübriidskeem, kuuludes samaaegselt mõlemasse kategooriasse). Funktsionaalskeemide eeliseks on ka arendustööde lihtsustamine, sest enam ei piirata mõtlemist konkreetsete seadmetega. Samuti ei viidata skeemis erinevatele energialiikidele, vaid on keskendutud hälbe likvideerimisele (joonis 1.1). Tähtis on seejuures jälgida, et signaalide teed oleks ühesuunalised ja signaalid läbiksid funktsioonblokke sisendilt väljundile, kuigi reaalsel objektil võib aine või energia liikuda mõlemas suunas.
Signaalikontuuris tuleb ka arvestada signaali muutumisega (või ka mittemuutumisega) funktsionaalbloki läbimisel. Muutuda võivad nii signaali amplituud (võimendites) kui ka ajalised suurused – bloki väljundsignaal toimib ajaliselt erinevalt kui sisendsignaal (kondensaatori laadimine) või ka hilinemine sisendsignaali suhtes (konveierliin).
Kuigi funktsioonipõhine kirjeldusviis annab selgema pildi juhtimissüsteemist, ei anna see mõista, kuidas toimuvad siirdeprotsessid automaatjuhtimissüsteemis, kui pikaks kujuneb reguleerimisaeg, mis suunas tuleb juhttoimet muuta saavutamaks soovitud süsteemi käitumist. Selle kirjeldamiseks tuleb mõõta ja esitada matemaatiliselt automaatjuhtimissüsteemi kuuluvate objektide ja ka elementide nende staatilisi ja dünaamilisi omadusi. Niisamuti tuleks käituda nende teguritega, mis sunnivad automaatjuhtimissüsteemi kindlasksmääratud tööpunktist lahkuma, ehk siis häiringute ja ka muutuvate seadesuurustega.
2.2. Staatiline krakteristik ja võimendustegurEsmalt tuleb vaadelda elementide ja objektide olemust. Kõigis neis liigub signaal sisendilt väljundile, seejuures võivad signaali füüsikalised omadused muutuda (elektrimootori väljundiks on mehaaniline liikumine), aga see ei mõjuta objekti omadusi. Kui süsteemi sisendsignaal ja väljundsignaal on saavutanud stabiilse nivoo, võib väita, et süsteem töötab püsirežiimis ning kui igale sisendsignaalile vastab kindel väljundsignaal ja seejuures saavutatakse püsirežiim, siis selliste punktide alusel on võimalik koostada staatilised karakteristikud, millede alusel on võimalik kindlaks määrata väljundsignaali hälve mingi häiringu korral peale siirdeprotsessi lõppemist.
Näide 2.1.
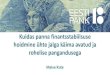
Joonisel 2.1. on kujutatud ühe objekti staatilised karakteristikud. Seadme sisendile antav seadesuurus on 3 ja tema tööd mõjutavad häiringud, mis on kokkukoondatud üheks, mille hinnanguline väärtus on 5. Antud sisendsuurused määravad tööpunktiks punkti A, mille juures seadme väljundsuurus on 24. Kui mingil põhjusel suureneb häiringufaktor 7,5 peale, siis nihkub tööpunkt alla punkti B, mille koordinaadid on (3; 16,5; 7,5). Endise väljundsuuruse saavutamiseks tuleb suurendada seadesuurust, mis automaatajamites toimub regulaatori abil, nii kaua kuni seade hakkab tööle punktis C või selle lähedal.
Joonis 2.1. Staatilised karakteristikud
Kui staatiline karakteristik on kujult lineaarne, siis on kõik tema punktid arvutatavad sirge võrrandi abil ja sellist objekti nimetatakse lineaarseks. Enamus reaalseid objekte ja elemente sinna hulka ei kuulu, kuna staatilised karakteristikud on kõverad (joonis 2.1.) või murdjooned (relee tunnusjoon), millede täpseks kirjeldamiseks tuleks kasutada mittelineaarseid diferentsiaalvõrrandeid või võrrandisüsteeme. Kuid staatilises plaanis on kõveraid võimalik enamasti lineariseerida tööpunkti puutujaga ja see lähenemine lihtsustab automaatjuhtimissüsteemide kirjeldamist. Murdjooni ei saa aga lineariseerida igas tööpunktis.
Üheks lineariseerimise eesmärgiks on määrata staatiline võimendustegur, mis kirjeldab väljund- ja sisendsignaali absoluutse muutuse suhet. Selleks tuleb lineariseeritud lõigul määrata kaks punkti, mille sisend- ja väljundkoordinaatide määramise teel leitakse absoluutsed juurdekasvud. Valemine väljendatuna
K=Y S
=Y 2−Y 1
S 2−S1, (2.1)
kus S1, S2 – vastavalt esimese ja teise punkti sisendile vastavad väärtused;Y1, Y2 – vastavalt esimese ja teise punkti väljundile vastavad väärtused.
Teine praktilisem meetod võimendusteguri saamiseks on katse, kus seadme sisend ja väljund mõõdetakse enne ühikhüppe andmist sisendile ja mõõtmist korratakse peale siirdeprotsessi lõppu, kusjuures tuleb tähelepanu pöörata, et võimendustegur on ühikutega suurus, kus ühikuks üldiselt on väljundühikut sisendühiku kohta (elektrimootoris oleks see s-1/V).
2.3. Dünaamiline karakteristikNagu punktis 1.4. mainiti, uuritakse ja võrreldakse erinevaid elemente ja objekte ühesuguste kindlaksmääratud signaalide abil, mille tulemusena objektide väljundites saab jälgida nende käitumist. Väljundsignaali muutumine siirdeprotsessi kestel kujutabki endast dünaamilist karakeristikut, mida on võimalik kirjeldada sisend- ja väljundsignaali siduva diferentsiaalvõrrandiga või siirdeprotsessi graafikuna, kus kujutatakse väljundi muutumist ajas kokkulepitud sisendsignaali korral. Sellist graafikut nimetatakse siirdekarakteristikuks.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
5
10
15
20
25
30
35
40
45
50
Sisendsuurus
Väl
jund
suur
us
S
Y n=0 2.5 5
7.5
10A
B
C
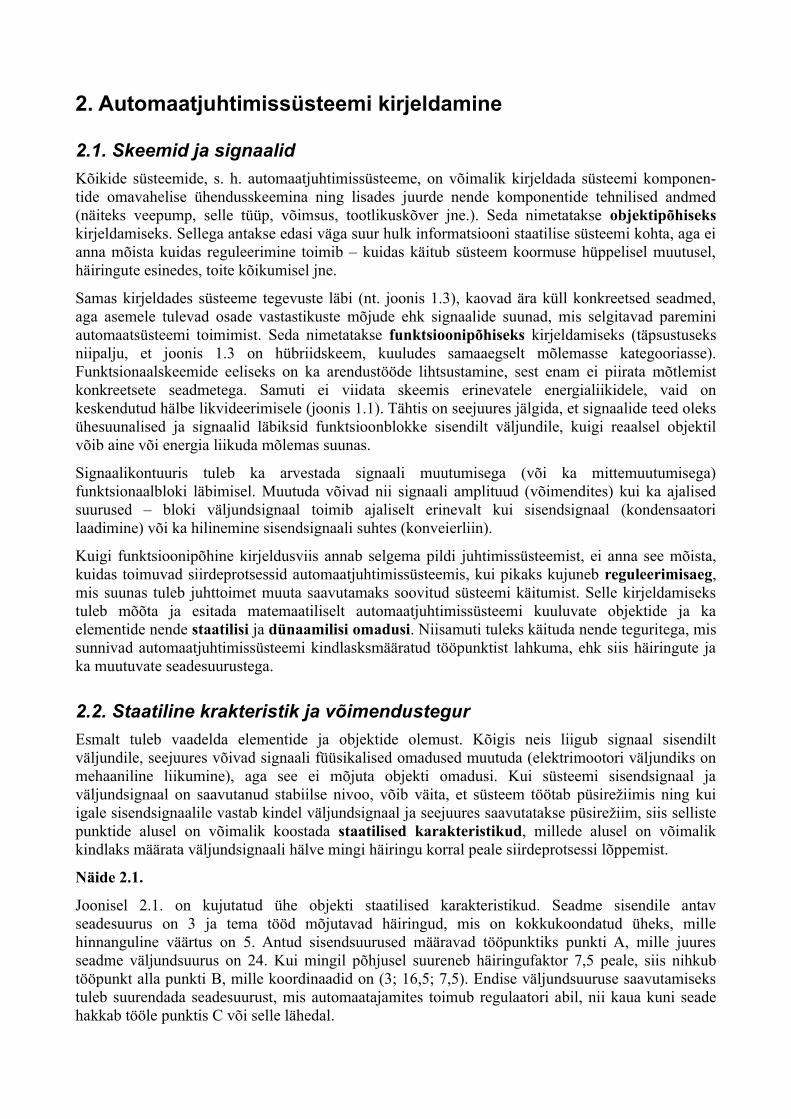
Näide 2.2.
Joonis 2.2. Takisti a) skeemitähis, b) siirdekarakteristik
Takistit läbiv vool tekitab pingelangu, mis võrdeline teda tekitava vooluga ja see avaldub
u t =R⋅i t (2.2)
Näide 2.3.
Joonis 2.3. Kondensaator a) skeemitähis, b) siirdekarakteristik vooluallikast toites,c) ideaalse kondensaatori siirdekarakteristik pingeallikast toites
Juhtides voolu kondensaatorisse, hakkab laengute mõjul muutuma kondensaatori pinge. Seda võib käsitleda laengute liitmisena.
u t = 1C ∫−∞
t
i d (2.3)
Näide 2.4.
Joonis 2.4. Mähis a) skeemitähis, b) siirdekarakteristik vooluallikast toites,c) siirdekarakteristik pingeallikast toites
Mähise pingelang on võrdne pingelanguga tema takistusel ja indutseeritud elektromotoorjõuga.
u t =i t ⋅RL⋅di t dt (2.4)
Ri(t)
u(t)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-0.5
0
0.5
1
1.5
Aeg [s]
Vool
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-0.5
0
0.5
1
1.5
Aeg [s]
Ping
e
i(t)
u(t)
a) b)
Ci(t)
u(t)
i(t)
u(t)
a) b)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.5
1
1.5
u(t)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
2
4
6
8x 10
13
Aeg
i(t)
0 0.5 1 1.5 2 2.5 3 3.5 40
0.5
1
1.5
i(t)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
1
2
3
4
5
Aeg
u(t)
u(t)
i(t)
c)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.5
1
1.5
i(t)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.5
1
1.5
2
Aeg
u(t)u(t)
Li(t) i(t)
u(t)
a) b)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.5
1
1.5
u(t)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.2
0.4
0.6
0.8
1
Aeg
i(t)i(t)
u(t)
c)
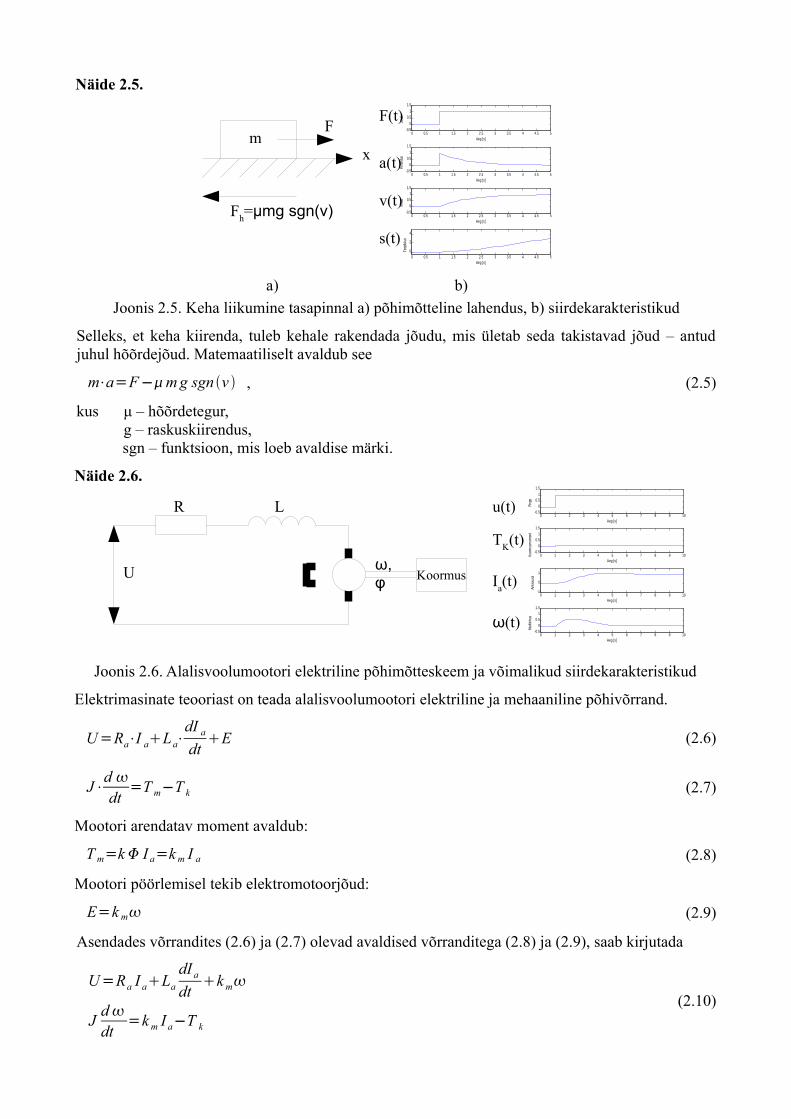
Näide 2.5.
Joonis 2.5. Keha liikumine tasapinnal a) põhimõtteline lahendus, b) siirdekarakteristikud
Selleks, et keha kiirenda, tuleb kehale rakendada jõudu, mis ületab seda takistavad jõud – antud juhul hõõrdejõud. Matemaatiliselt avaldub see
m⋅a=F−mg sgn v , (2.5)
kus μ – hõõrdetegur,g – raskuskiirendus,sgn – funktsioon, mis loeb avaldise märki.
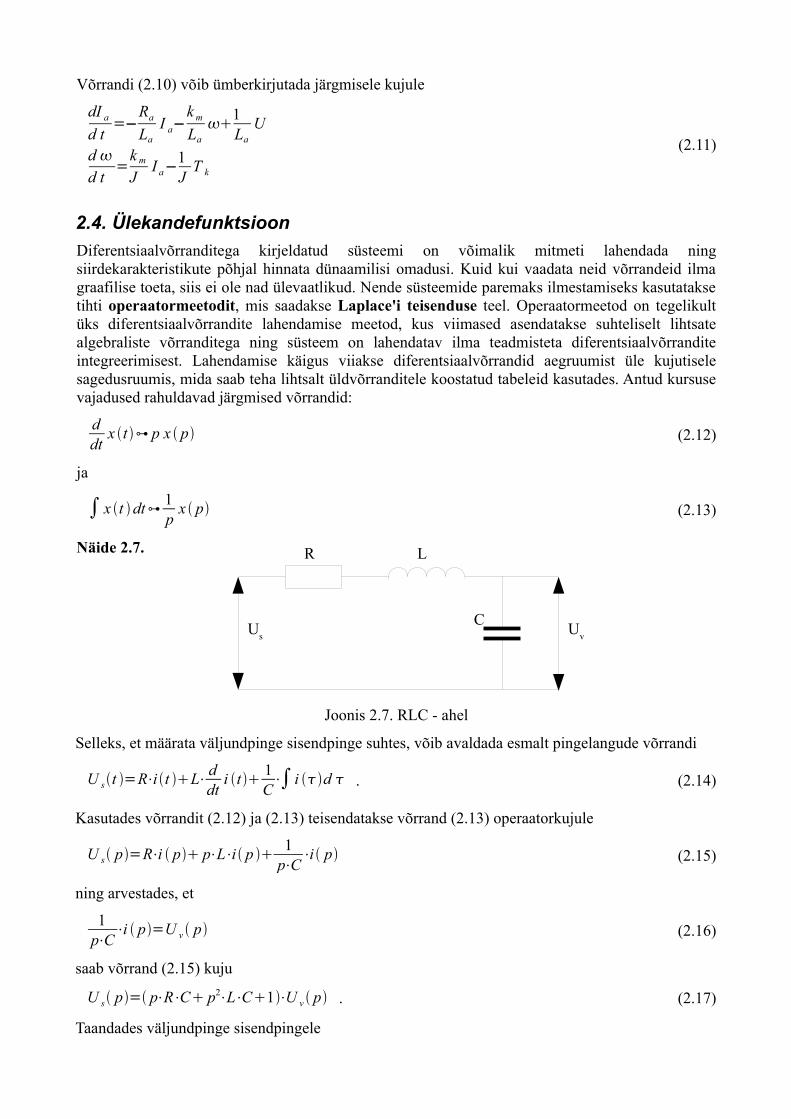
Näide 2.6.
Joonis 2.6. Alalisvoolumootori elektriline põhimõtteskeem ja võimalikud siirdekarakteristikud
Elektrimasinate teooriast on teada alalisvoolumootori elektriline ja mehaaniline põhivõrrand.
U=Ra⋅I aLa⋅dI a
dtE (2.6)
J⋅d dt
=T m−T k (2.7)
Mootori arendatav moment avaldub:
T m=k I a=km I a (2.8)
Mootori pöörlemisel tekib elektromotoorjõud:
E=km (2.9)
Asendades võrrandites (2.6) ja (2.7) olevad avaldised võrranditega (2.8) ja (2.9), saab kirjutada
U=Ra I aLa
dI a
dtkm
J ddt
=km I a−T k
(2.10)
F
Fh=μmg sgn(v)
mx
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-0.5
0
0.5
11.5
Aeg [s]
Joud
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-0.5
0
0.51
1.5
Aeg [s]
Kiire
ndus
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-0.5
0
0.51
1.5
Aeg [s]
Kiiru
s
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
2
4
Aeg [s]
Teep
ikkus
F(t)
a(t)
v(t)
s(t)
a) b)
R L
Koormusω, φU
0 1 2 3 4 5 6 7 8 9 10-0.5
0
0.5
1
1.5
Aeg [s]
Ping
e
0 1 2 3 4 5 6 7 8 9 10-0.5
0
0.5
1
1.5
Aeg [s]
Koor
mus
mom
ent
0 1 2 3 4 5 6 7 8 9 10-1
0
1
Aeg [s]
Ankr
uvoo
l
0 1 2 3 4 5 6 7 8 9 10-0.5
0
0.5
11.5
Aeg [s]
Nurk
kiiru
s
u(t)
TK(t)
Ia(t)
ω(t)
Võrrandi (2.10) võib ümberkirjutada järgmisele kujule
dI a
d t=−
Ra
LaI a−
km
La1
LaU
d d t
=km
JI a−
1J
T k
(2.11)
2.4. ÜlekandefunktsioonDiferentsiaalvõrranditega kirjeldatud süsteemi on võimalik mitmeti lahendada ning siirdekarakteristikute põhjal hinnata dünaamilisi omadusi. Kuid kui vaadata neid võrrandeid ilma graafilise toeta, siis ei ole nad ülevaatlikud. Nende süsteemide paremaks ilmestamiseks kasutatakse tihti operaatormeetodit, mis saadakse Laplace'i teisenduse teel. Operaatormeetod on tegelikult üks diferentsiaalvõrrandite lahendamise meetod, kus viimased asendatakse suhteliselt lihtsate algebraliste võrranditega ning süsteem on lahendatav ilma teadmisteta diferentsiaalvõrrandite integreerimisest. Lahendamise käigus viiakse diferentsiaalvõrrandid aegruumist üle kujutisele sagedusruumis, mida saab teha lihtsalt üldvõrranditele koostatud tabeleid kasutades. Antud kursuse vajadused rahuldavad järgmised võrrandid:
ddt
x t ⊶ p x p (2.12)
ja
∫ x t dt⊶ 1p
x p (2.13)
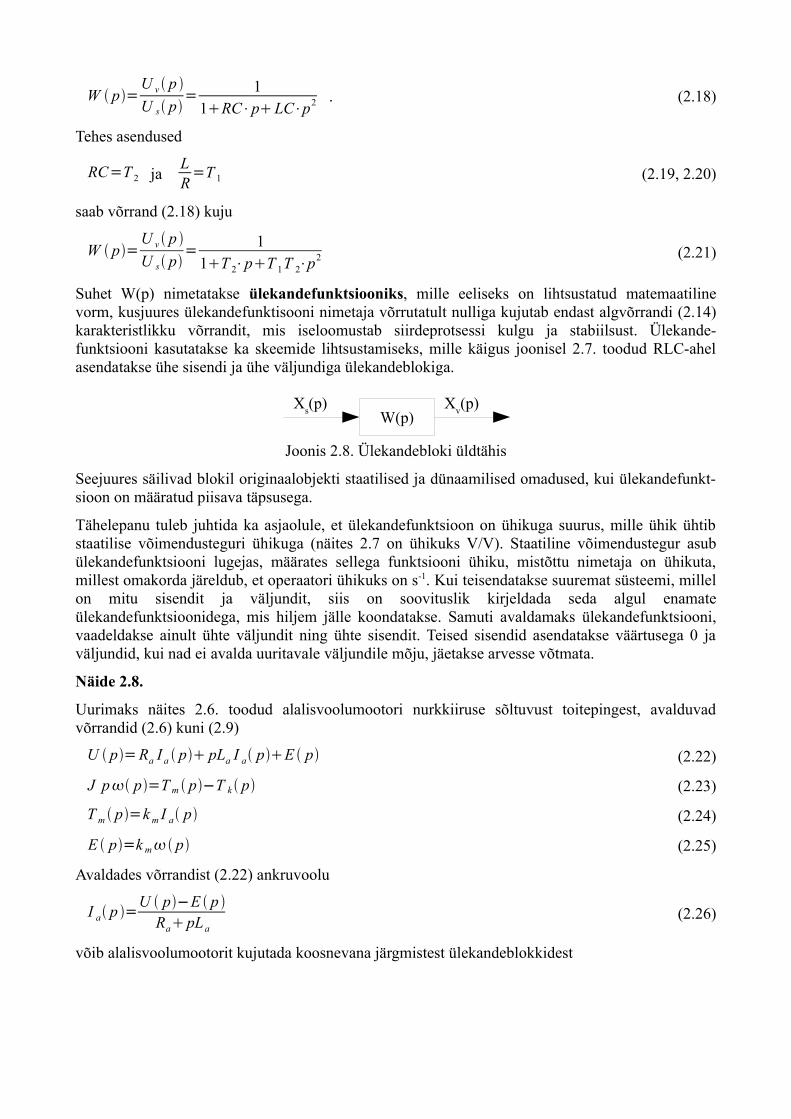
Näide 2.7.
Joonis 2.7. RLC - ahel
Selleks, et määrata väljundpinge sisendpinge suhtes, võib avaldada esmalt pingelangude võrrandi
U st =R⋅i t L⋅ddt
i t 1C⋅∫ i d . (2.14)
Kasutades võrrandit (2.12) ja (2.13) teisendatakse võrrand (2.13) operaatorkujule
U s p=R⋅i p p⋅L⋅i p 1p⋅C
⋅i p (2.15)
ning arvestades, et
1p⋅C
⋅i p=U v p (2.16)
saab võrrand (2.15) kuju
U s p= p⋅R⋅C p2⋅L⋅C1⋅U v p . (2.17)
Taandades väljundpinge sisendpingele
R L
UsC Uv
W p=U v p U s p
= 11RC⋅pLC⋅p2 . (2.18)
Tehes asendused
RC=T 2 ja LR=T 1 (2.19, 2.20)
saab võrrand (2.18) kuju
W p=U v p U s p
= 11T 2⋅pT 1T 2⋅p
2 (2.21)
Suhet W(p) nimetatakse ülekandefunktsiooniks, mille eeliseks on lihtsustatud matemaatiline vorm, kusjuures ülekandefunktisooni nimetaja võrrutatult nulliga kujutab endast algvõrrandi (2.14) karakteristlikku võrrandit, mis iseloomustab siirdeprotsessi kulgu ja stabiilsust. Ülekande-funktsiooni kasutatakse ka skeemide lihtsustamiseks, mille käigus joonisel 2.7. toodud RLC-ahel asendatakse ühe sisendi ja ühe väljundiga ülekandeblokiga.
Joonis 2.8. Ülekandebloki üldtähis
Seejuures säilivad blokil originaalobjekti staatilised ja dünaamilised omadused, kui ülekandefunkt-sioon on määratud piisava täpsusega.
Tähelepanu tuleb juhtida ka asjaolule, et ülekandefunktsioon on ühikuga suurus, mille ühik ühtib staatilise võimendusteguri ühikuga (näites 2.7 on ühikuks V/V). Staatiline võimendustegur asub ülekandefunktsiooni lugejas, määrates sellega funktsiooni ühiku, mistõttu nimetaja on ühikuta, millest omakorda järeldub, et operaatori ühikuks on s-1. Kui teisendatakse suuremat süsteemi, millel on mitu sisendit ja väljundit, siis on soovituslik kirjeldada seda algul enamate ülekandefunktsioonidega, mis hiljem jälle koondatakse. Samuti avaldamaks ülekandefunktsiooni, vaadeldakse ainult ühte väljundit ning ühte sisendit. Teised sisendid asendatakse väärtusega 0 ja väljundid, kui nad ei avalda uuritavale väljundile mõju, jäetakse arvesse võtmata.
Näide 2.8.
Uurimaks näites 2.6. toodud alalisvoolumootori nurkkiiruse sõltuvust toitepingest, avalduvad võrrandid (2.6) kuni (2.9)
U p=Ra I a p pLa I a pE p (2.22)
J p p=T m p−T k p (2.23)
T m p=km I a p (2.24)
E p=km p (2.25)
Avaldades võrrandist (2.22) ankruvoolu
I a p =U p−E p
Ra pLa(2.26)
võib alalisvoolumootorit kujutada koosnevana järgmistest ülekandeblokkidest
W(p)Xs(p) Xv(p)
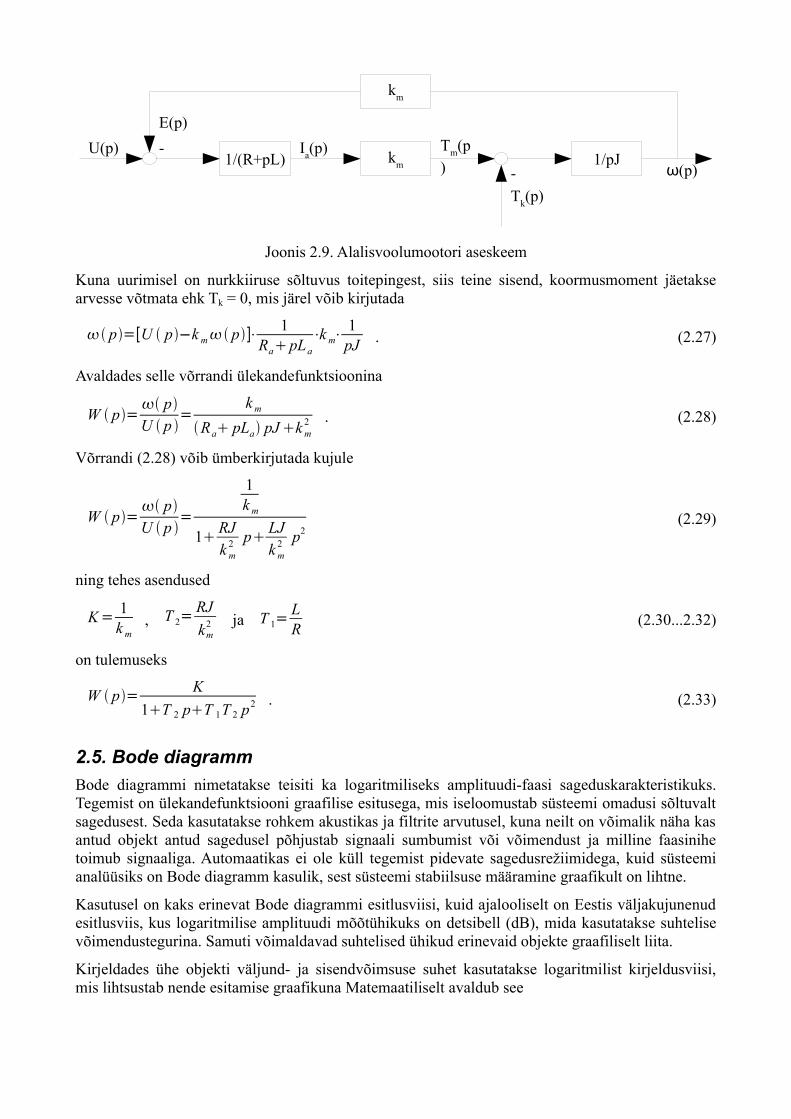
Joonis 2.9. Alalisvoolumootori aseskeem
Kuna uurimisel on nurkkiiruse sõltuvus toitepingest, siis teine sisend, koormusmoment jäetakse arvesse võtmata ehk Tk = 0, mis järel võib kirjutada
p=[U p−km p]⋅ 1RapLa
⋅km⋅1pJ . (2.27)
Avaldades selle võrrandi ülekandefunktsioonina
W p= pU p
=km
Ra pLa pJkm2 . (2.28)
Võrrandi (2.28) võib ümberkirjutada kujule
W p= pU p
=
1km
1 RJkm
2 p LJkm
2 p2(2.29)
ning tehes asendused
K= 1km
, T 2=RJkm
2 ja T 1=LR (2.30...2.32)
on tulemuseks
W p= K1T 2 pT 1T 2 p2 . (2.33)
2.5. Bode diagrammBode diagrammi nimetatakse teisiti ka logaritmiliseks amplituudi-faasi sageduskarakteristikuks. Tegemist on ülekandefunktsiooni graafilise esitusega, mis iseloomustab süsteemi omadusi sõltuvalt sagedusest. Seda kasutatakse rohkem akustikas ja filtrite arvutusel, kuna neilt on võimalik näha kas antud objekt antud sagedusel põhjustab signaali sumbumist või võimendust ja milline faasinihe toimub signaaliga. Automaatikas ei ole küll tegemist pidevate sagedusrežiimidega, kuid süsteemi analüüsiks on Bode diagramm kasulik, sest süsteemi stabiilsuse määramine graafikult on lihtne.
Kasutusel on kaks erinevat Bode diagrammi esitlusviisi, kuid ajalooliselt on Eestis väljakujunenud esitlusviis, kus logaritmilise amplituudi mõõtühikuks on detsibell (dB), mida kasutatakse suhtelise võimendustegurina. Samuti võimaldavad suhtelised ühikud erinevaid objekte graafiliselt liita.
Kirjeldades ühe objekti väljund- ja sisendvõimsuse suhet kasutatakse logaritmilist kirjeldusviisi, mis lihtsustab nende esitamise graafikuna Matemaatiliselt avaldub see
kmIa(p) Tm(p
)1/(R+pL)
km
1/pJU(p)
ω(p)
E(p)-
Tk(p)-
L=logP v
P s(2.34)
ja ühikuks on 1 bell, mis tähendab võimsuste suhet 10:1. Kuna tihti on tegemist väiksemate suhtarvudega, siis kasutatakse ühikuna detsibelli
L=10⋅logP v
P s(2.35)
Ühik (detsi)bell oli algselt seotud võimsuse ehk „ruutsuurusega“, siis lineaarsete suuruste jaoks kehtib elektrotehnikast tuntud suhte P ~ I2 alusel
L=10⋅logP v
P s=10⋅log
I v2
I s2=20⋅log
I v
I s=20⋅log K . (2.36)
Ülekandefunktsioonist üleminek logaritmilisele kujule toimub tingimusel, et p = jω
log W p= logW j=log K e j=log K j , (2.37)
kuid kui konstrueeritakse käsitsi Bode diagrammi, siis lahendatakse see asümptootidega.
Näide 2.12.
Olgu antud ampituudi-faasi sagedustunnusjoon
W 3 j=K⋅1T 1 j1T 2 j , (2.38)
kus T1>T2 ja mille võib jagada kaheks iseseisvaks ülekandefunktsiooniks
W 1 j=1T 1 j ja W 2 j= K1T 2 j (2.39...2.40)
ning need võib eraldi lahendada. Esmalt määratakse murdesagedus
1=1T 1
ja 2=1T 2
(2.41)
ning mis kantakse ka Bode diagrammile. Seejärel vaadeldakse kummagi funktsiooni amplituudi väärtusi enne ja pärast murdesagedust
W 1 j=1T 1 j∣≪1=1
W 1 j=1T 1 j∣≫1=T 1 j1 . (2.42)
(jω)1 tähendab, et sageduse kasvades kasvab ka võimendustegur ehk sageduse kasvades ühe dekaadi võrra kasvab ka võimendustegur ühe dekaadi ehk 20log võrra.
W 2 j= K1T 2 j
∣≪2=K
W 2 j=K
1T 2 j∣≫2
=KT 2
j−1(2.43)
(jω)-1 tähendab, et sageduse kasvades väheneb võimendustegur, seejuures ei oma eesolevad konstandid erilist tähtsust. Selleks, et saadud tulemusi diagrammile kanda logaritmitakse võimendustegurid vastavalt võrrandile (2.36). Misjärel võib need ülekandefunktsioonid liita ja tulemuseks on lähteülesande amplituudi sageduskarakteristik.
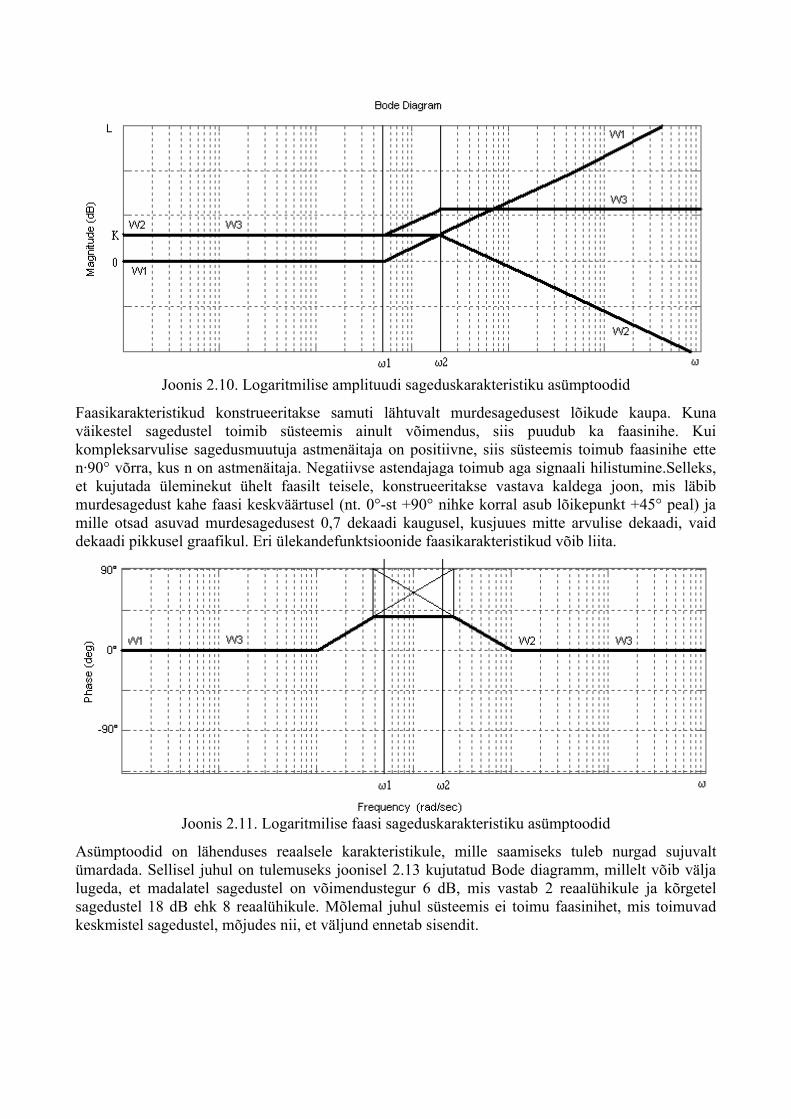
Joonis 2.10. Logaritmilise amplituudi sageduskarakteristiku asümptoodid
Faasikarakteristikud konstrueeritakse samuti lähtuvalt murdesagedusest lõikude kaupa. Kuna väikestel sagedustel toimib süsteemis ainult võimendus, siis puudub ka faasinihe. Kui kompleksarvulise sagedusmuutuja astmenäitaja on positiivne, siis süsteemis toimub faasinihe ette n·90° võrra, kus n on astmenäitaja. Negatiivse astendajaga toimub aga signaali hilistumine.Selleks, et kujutada üleminekut ühelt faasilt teisele, konstrueeritakse vastava kaldega joon, mis läbib murdesagedust kahe faasi keskväärtusel (nt. 0°-st +90° nihke korral asub lõikepunkt +45° peal) ja mille otsad asuvad murdesagedusest 0,7 dekaadi kaugusel, kusjuues mitte arvulise dekaadi, vaid dekaadi pikkusel graafikul. Eri ülekandefunktsioonide faasikarakteristikud võib liita.
Joonis 2.11. Logaritmilise faasi sageduskarakteristiku asümptoodid
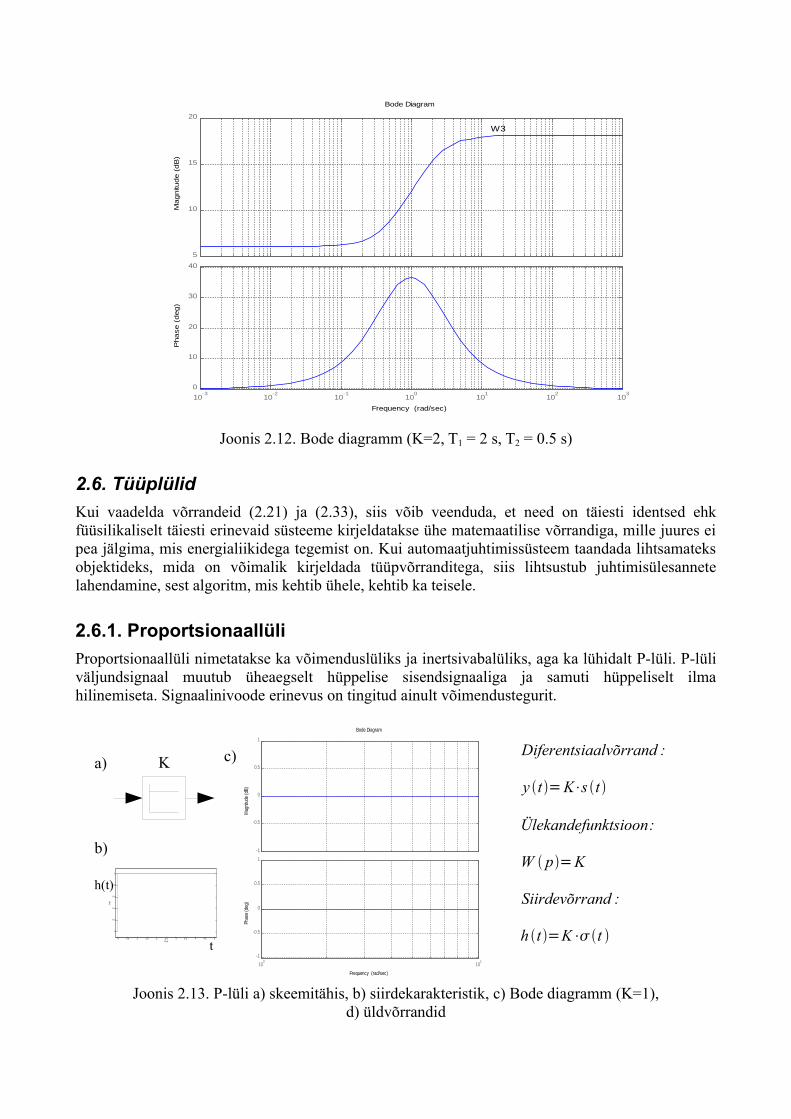
Asümptoodid on lähenduses reaalsele karakteristikule, mille saamiseks tuleb nurgad sujuvalt ümardada. Sellisel juhul on tulemuseks joonisel 2.13 kujutatud Bode diagramm, millelt võib välja lugeda, et madalatel sagedustel on võimendustegur 6 dB, mis vastab 2 reaalühikule ja kõrgetel sagedustel 18 dB ehk 8 reaalühikule. Mõlemal juhul süsteemis ei toimu faasinihet, mis toimuvad keskmistel sagedustel, mõjudes nii, et väljund ennetab sisendit.
-1
-0.5
0
0.5
1
Mag
nitud
e (d
B)
100
101
-1
-0.5
0
0.5
1
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
K
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
0
0.2
0.4
0.6
0.8
1
Aeg
h(t
)
h(t)
t
a)
b)
c)
Joonis 2.12. Bode diagramm (K=2, T1 = 2 s, T2 = 0.5 s)
2.6. TüüplülidKui vaadelda võrrandeid (2.21) ja (2.33), siis võib veenduda, et need on täiesti identsed ehk füüsilikaliselt täiesti erinevaid süsteeme kirjeldatakse ühe matemaatilise võrrandiga, mille juures ei pea jälgima, mis energialiikidega tegemist on. Kui automaatjuhtimissüsteem taandada lihtsamateks objektideks, mida on võimalik kirjeldada tüüpvõrranditega, siis lihtsustub juhtimisülesannete lahendamine, sest algoritm, mis kehtib ühele, kehtib ka teisele.
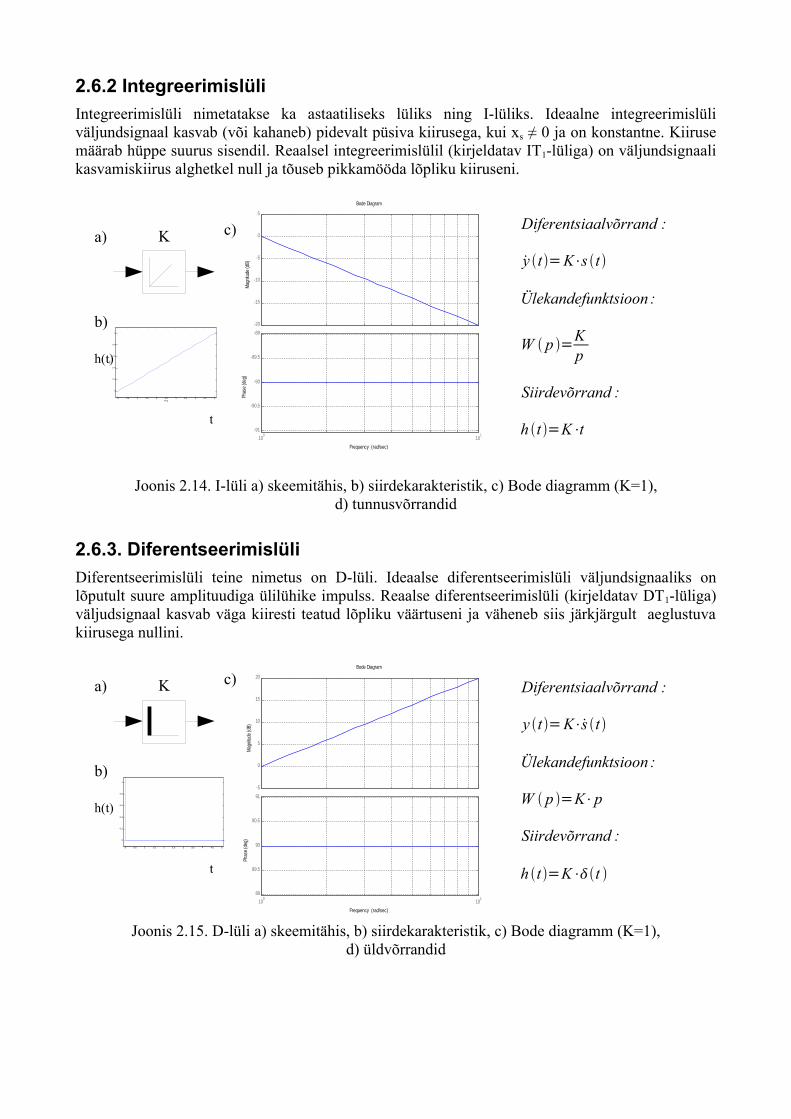
2.6.1. ProportsionaallüliProportsionaallüli nimetatakse ka võimenduslüliks ja inertsivabalüliks, aga ka lühidalt P-lüli. P-lüli väljundsignaal muutub üheaegselt hüppelise sisendsignaaliga ja samuti hüppeliselt ilma hilinemiseta. Signaalinivoode erinevus on tingitud ainult võimendustegurit.
Diferentsiaalvõrrand :
y t=K⋅s t
Ülekandefunktsioon:
W p=K
Siirdevõrrand :
h t =K⋅t
Joonis 2.13. P-lüli a) skeemitähis, b) siirdekarakteristik, c) Bode diagramm (K=1),d) üldvõrrandid
5
10
15
20
Magnitu
de (
dB
)
W3
10-3
10-2
10-1
100
101
102
103
0
10
20
30
40
Pha
se (
deg)
Bode Diagram
Frequency (rad/sec)
-5
0
5
10
15
20
Mag
nitud
e (d
B)
100
101
89
89.5
90
90.5
91
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
0
0.2
0.4
0.6
0.8
1
K
h(t)
t
a)
b)
c)
-20
-15
-10
-5
0
5
Mag
nitud
e (d
B)
100
101
-91
-90.5
-90
-89.5
-89
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
0
0.2
0.4
0.6
0.8
1
Aeg
h(t
)
K
h(t)
t
a)
b)
c)
2.6.2 IntegreerimislüliIntegreerimislüli nimetatakse ka astaatiliseks lüliks ning I-lüliks. Ideaalne integreerimislüli väljundsignaal kasvab (või kahaneb) pidevalt püsiva kiirusega, kui xs ≠ 0 ja on konstantne. Kiiruse määrab hüppe suurus sisendil. Reaalsel integreerimislülil (kirjeldatav IT1-lüliga) on väljundsignaali kasvamiskiirus alghetkel null ja tõuseb pikkamööda lõpliku kiiruseni.
Diferentsiaalvõrrand :
y t=K⋅s t
Ülekandefunktsioon :
W p =Kp
Siirdevõrrand :
h t =K⋅t
Joonis 2.14. I-lüli a) skeemitähis, b) siirdekarakteristik, c) Bode diagramm (K=1),d) tunnusvõrrandid
2.6.3. DiferentseerimislüliDiferentseerimislüli teine nimetus on D-lüli. Ideaalse diferentseerimislüli väljundsignaaliks on lõputult suure amplituudiga ülilühike impulss. Reaalse diferentseerimislüli (kirjeldatav DT1-lüliga) väljudsignaal kasvab väga kiiresti teatud lõpliku väärtuseni ja väheneb siis järkjärgult aeglustuva kiirusega nullini.
Diferentsiaalvõrrand :
y t=K⋅s t
Ülekandefunktsioon :
W p =K⋅p
Siirdevõrrand :
h t =K⋅t
Joonis 2.15. D-lüli a) skeemitähis, b) siirdekarakteristik, c) Bode diagramm (K=1),d) üldvõrrandid
K, T
-60
-40
-20
0
20
40
Mag
nitud
e (d
B)
10-2
10-1
100
101
-180
-135
-90
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
t
a)
b)
c)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.5
1
1.5
2
2.5
3
3.5
4
Aeg
h(t
)
T
h(t)
-60
-50
-40
-30
-20
-10
0
Mag
nitud
e (d
B)
10-2
10-1
100
101
102
0
45
90
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.2
0.4
0.6
0.8
1
Aeg
h(t
)
T
K/T
K, T
t
a)
b)
c)
h(t)
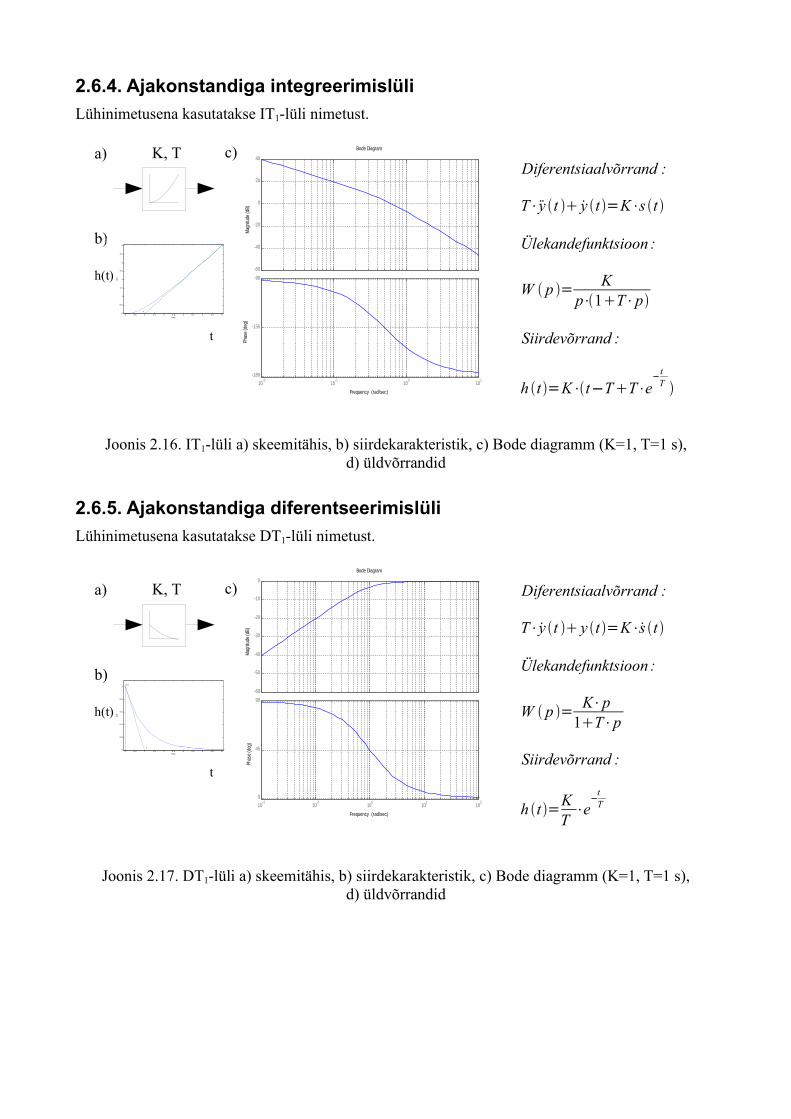
2.6.4. Ajakonstandiga integreerimislüliLühinimetusena kasutatakse IT1-lüli nimetust.
Diferentsiaalvõrrand :
T⋅y t y t =K⋅s t
Ülekandefunktsioon :
W p = Kp⋅1T⋅p
Siirdevõrrand :
h t =K⋅t−TT⋅e−tT
Joonis 2.16. IT1-lüli a) skeemitähis, b) siirdekarakteristik, c) Bode diagramm (K=1, T=1 s),d) üldvõrrandid
2.6.5. Ajakonstandiga diferentseerimislüliLühinimetusena kasutatakse DT1-lüli nimetust.
Diferentsiaalvõrrand :
T⋅y t y t =K⋅s t
Ülekandefunktsioon :
W p = K⋅p1T⋅p
Siirdevõrrand :
h t =KT⋅e
−tT
Joonis 2.17. DT1-lüli a) skeemitähis, b) siirdekarakteristik, c) Bode diagramm (K=1, T=1 s),d) üldvõrrandid
K, Tt
t
a)
b)
c)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.2
0.4
0.6
0.8
1
Aeg
h(t
)
Tt
h(t)
Tt
-40
-35
-30
-25
-20
-15
-10
-5
0
Mag
nitud
e (d
B)
10-2
10-1
100
101
102
-90
-45
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
K, T
t
a)
b)
c)
h(t)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Aeg
h(t
)
T
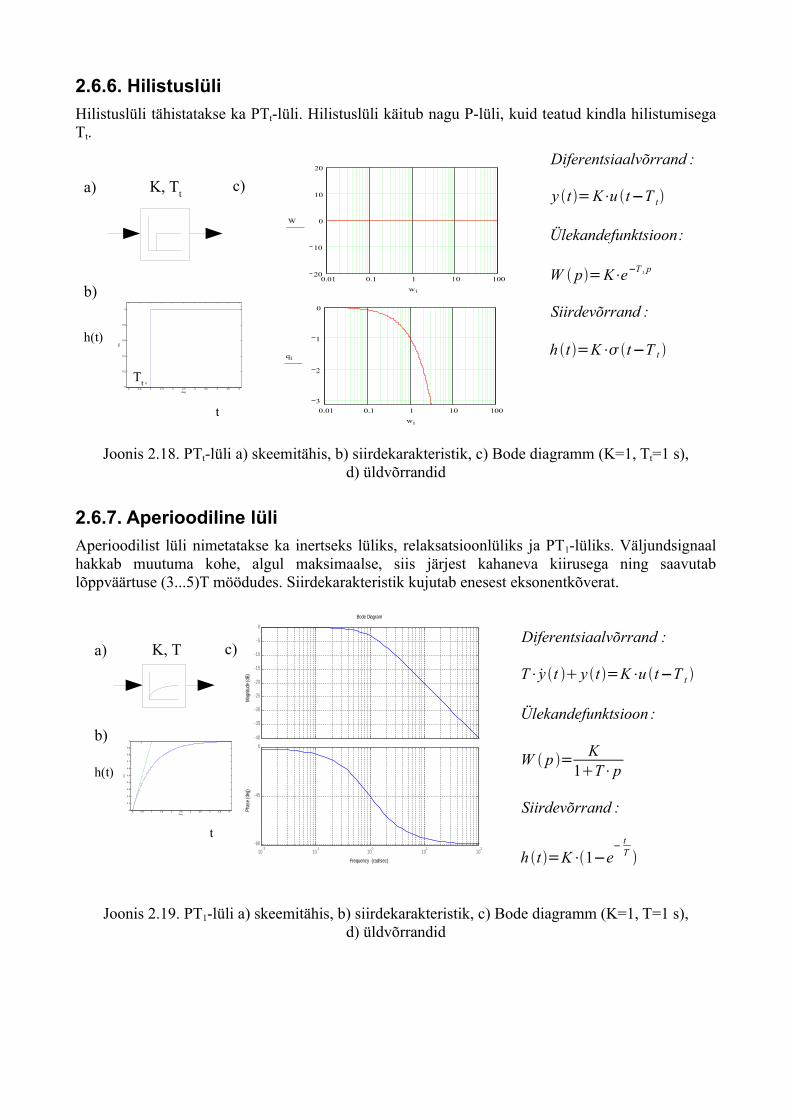
2.6.6. HilistuslüliHilistuslüli tähistatakse ka PTt-lüli. Hilistuslüli käitub nagu P-lüli, kuid teatud kindla hilistumisega Tt.
Diferentsiaalvõrrand :
y t =K⋅u t−T t
Ülekandefunktsioon:
W p=K⋅e−T t p
Siirdevõrrand :
h t =K⋅t−T t
Joonis 2.18. PTt-lüli a) skeemitähis, b) siirdekarakteristik, c) Bode diagramm (K=1, Tt=1 s),d) üldvõrrandid
2.6.7. Aperioodiline lüliAperioodilist lüli nimetatakse ka inertseks lüliks, relaksatsioonlüliks ja PT1-lüliks. Väljundsignaal hakkab muutuma kohe, algul maksimaalse, siis järjest kahaneva kiirusega ning saavutab lõppväärtuse (3...5)T möödudes. Siirdekarakteristik kujutab enesest eksonentkõverat.
Diferentsiaalvõrrand :
T⋅y t y t =K⋅u t−T t
Ülekandefunktsioon :
W p = K1T⋅p
Siirdevõrrand :
h t =K⋅1−e− t
T
Joonis 2.19. PT1-lüli a) skeemitähis, b) siirdekarakteristik, c) Bode diagramm (K=1, T=1 s),d) üldvõrrandid
0.01 0.1 1 10 10020
10
0
10
20
W
wi
0.01 0.1 1 10 1003
2
1
0
qi
wi
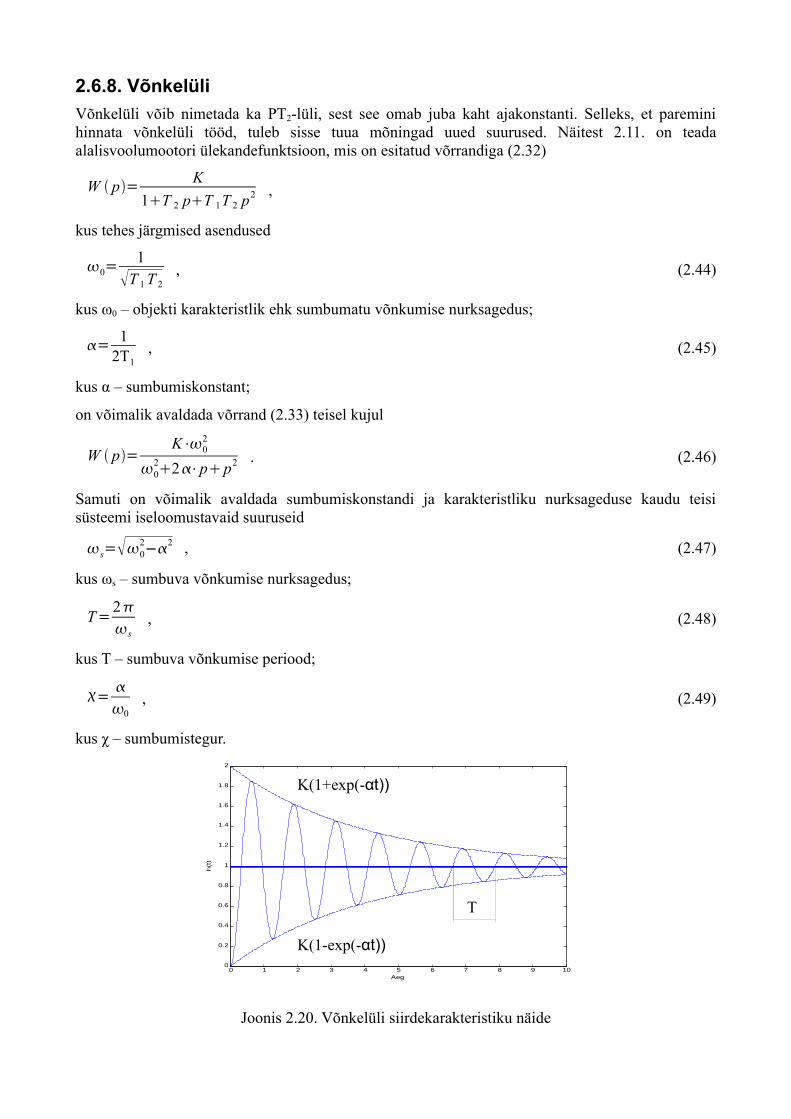
2.6.8. VõnkelüliVõnkelüli võib nimetada ka PT2-lüli, sest see omab juba kaht ajakonstanti. Selleks, et paremini hinnata võnkelüli tööd, tuleb sisse tuua mõningad uued suurused. Näitest 2.11. on teada alalisvoolumootori ülekandefunktsioon, mis on esitatud võrrandiga (2.32)
W p= K1T 2 pT 1T 2 p2 ,
kus tehes järgmised asendused
0=1
T 1 T 2, (2.44)
kus ω0 – objekti karakteristlik ehk sumbumatu võnkumise nurksagedus;
= 12T1
, (2.45)
kus α – sumbumiskonstant;
on võimalik avaldada võrrand (2.33) teisel kujul
W p=K⋅0
2
022⋅pp2 . (2.46)
Samuti on võimalik avaldada sumbumiskonstandi ja karakteristliku nurksageduse kaudu teisi süsteemi iseloomustavaid suuruseid
s=02−2 , (2.47)
kus ωs – sumbuva võnkumise nurksagedus;
T= 2s
, (2.48)
kus T – sumbuva võnkumise periood;
=0
, (2.49)
kus χ – sumbumistegur.
Joonis 2.20. Võnkelüli siirdekarakteristiku näide
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Aeg
h(t
)
K(1+exp(-αt))
K(1-exp(-αt))
T
-80
-70
-60
-50
-40
-30
-20
-10
0
Mag
nitud
e (d
B)
10-2
10-1
100
101
102
-180
-135
-90
-45
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
K, T1, T2
t
a)
b)
c)
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Aeg
h(t
)h(t)
-60
-50
-40
-30
-20
-10
0
Mag
nitud
e (d
B)
10-1
100
101
102
-180
-135
-90
-45
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
K, T, T
t
a)
b)
c)
h(t)
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Aeg
h(t
)
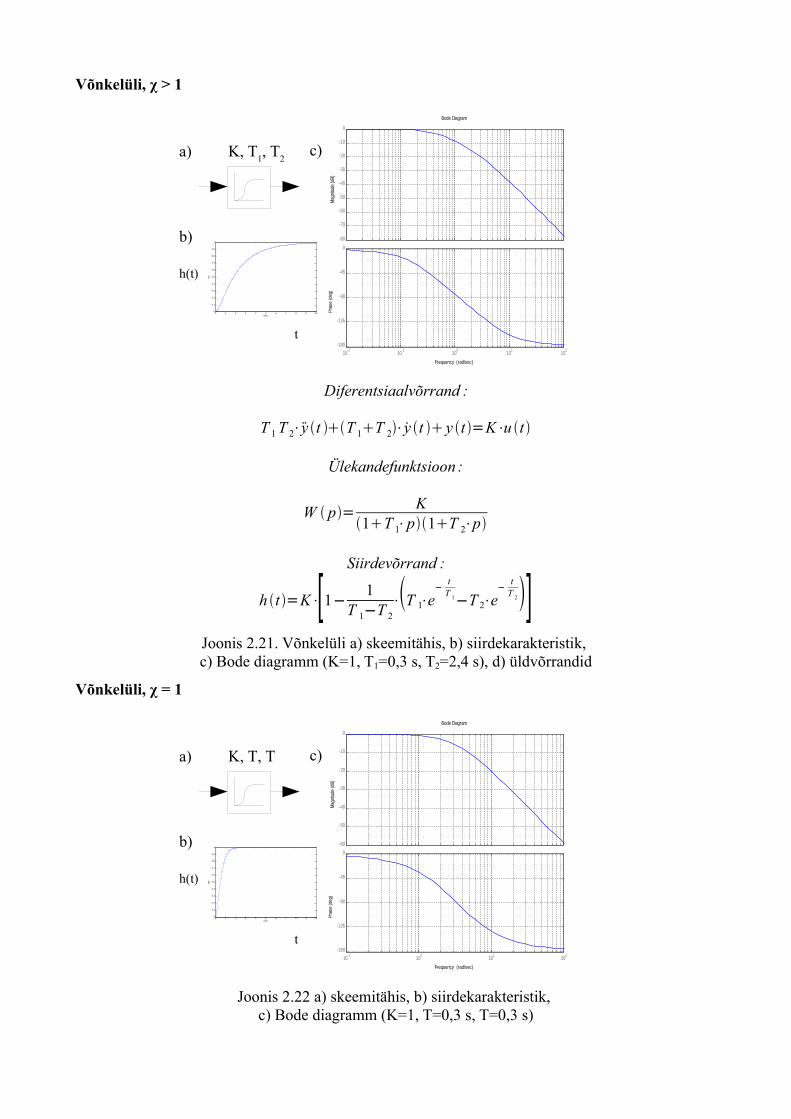
Võnkelüli, χ > 1
Diferentsiaalvõrrand :
T 1 T 2⋅y t T 1T 2⋅y t y t =K⋅u t
Ülekandefunktsioon :
W p= K1T 1⋅p1T 2⋅p
Siirdevõrrand :
h t =K⋅[1− 1T 1−T 2
⋅T 1⋅e−
tT 1−T 2⋅e
−tT 2]
Joonis 2.21. Võnkelüli a) skeemitähis, b) siirdekarakteristik, c) Bode diagramm (K=1, T1=0,3 s, T2=2,4 s), d) üldvõrrandid
Võnkelüli, χ = 1
Joonis 2.22 a) skeemitähis, b) siirdekarakteristik, c) Bode diagramm (K=1, T=0,3 s, T=0,3 s)
-100
-80
-60
-40
-20
0
20
Mag
nitud
e (d
B)
10-1
100
101
102
103
-180
-135
-90
-45
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
K, ω0, χ
t
a)
b)
c)
h(t)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Aeg
h(t
)
0
1
Diferentsiaalvõrrand :
T 2⋅y t 2T⋅y t y t =K⋅u t
Ülekandefunktsioon :
W p= K1T⋅p2
Siirdevõrrand :
ht =K⋅[1−1 tT⋅e
−tT ]
Joonis 2.22 d) üldvõrrandid
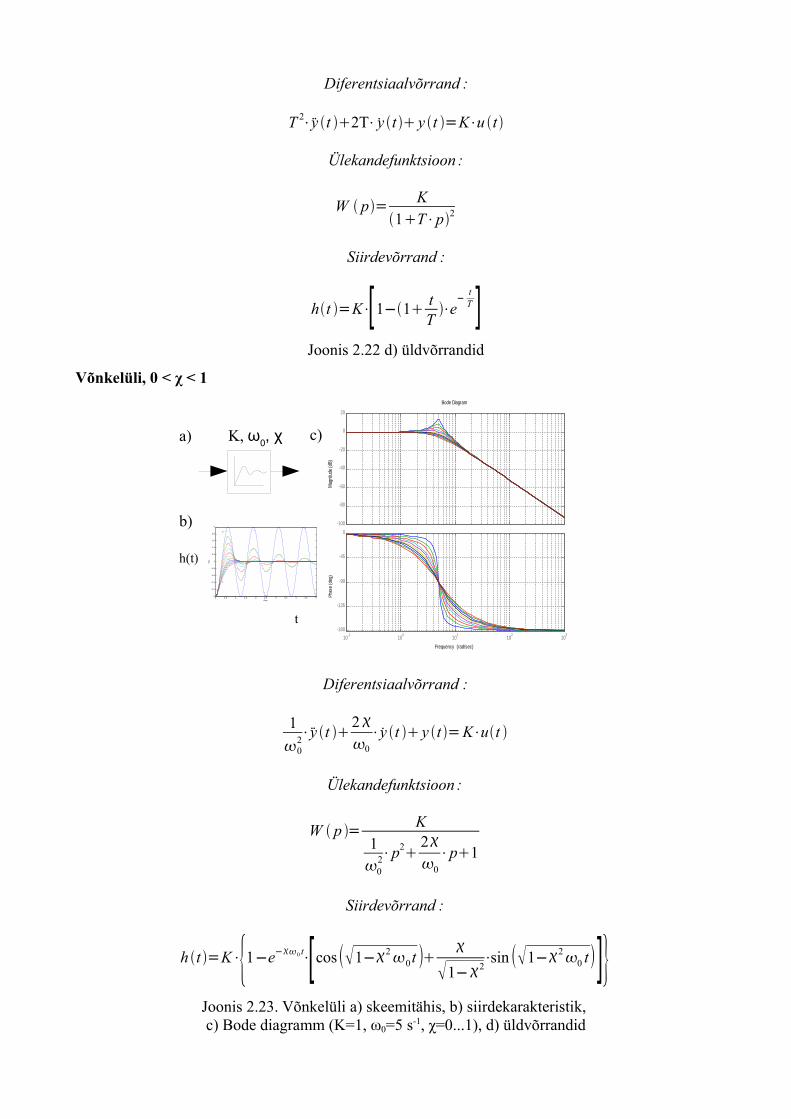
Võnkelüli, 0 < χ < 1
Diferentsiaalvõrrand :
10
2⋅y t 20
⋅y t y t =K⋅ut
Ülekandefunktsioon :
W p = K10
2⋅p220
⋅p1
Siirdevõrrand :
h t =K⋅{1−e−0 t⋅[cos 1−20t
1−2⋅sin 1−20 t ]}
Joonis 2.23. Võnkelüli a) skeemitähis, b) siirdekarakteristik, c) Bode diagramm (K=1, ω0=5 s-1, χ=0...1), d) üldvõrrandid
0
10
20
30
40
50
60
Mag
nitud
e (d
B)
10-2
10-1
100
101
102
-90
-45
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
K, Ti
t
a)
b)
c)
h(t)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
1
2
3
4
5
6
Aeg
h(t
)
0
5
10
15
20
25
30
35
40
Mag
nitud
e (d
B)
10-2
10-1
100
101
102
0
45
90
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
K, Td
t
a)
b)
c)
h(t)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Aeg
h(t
)
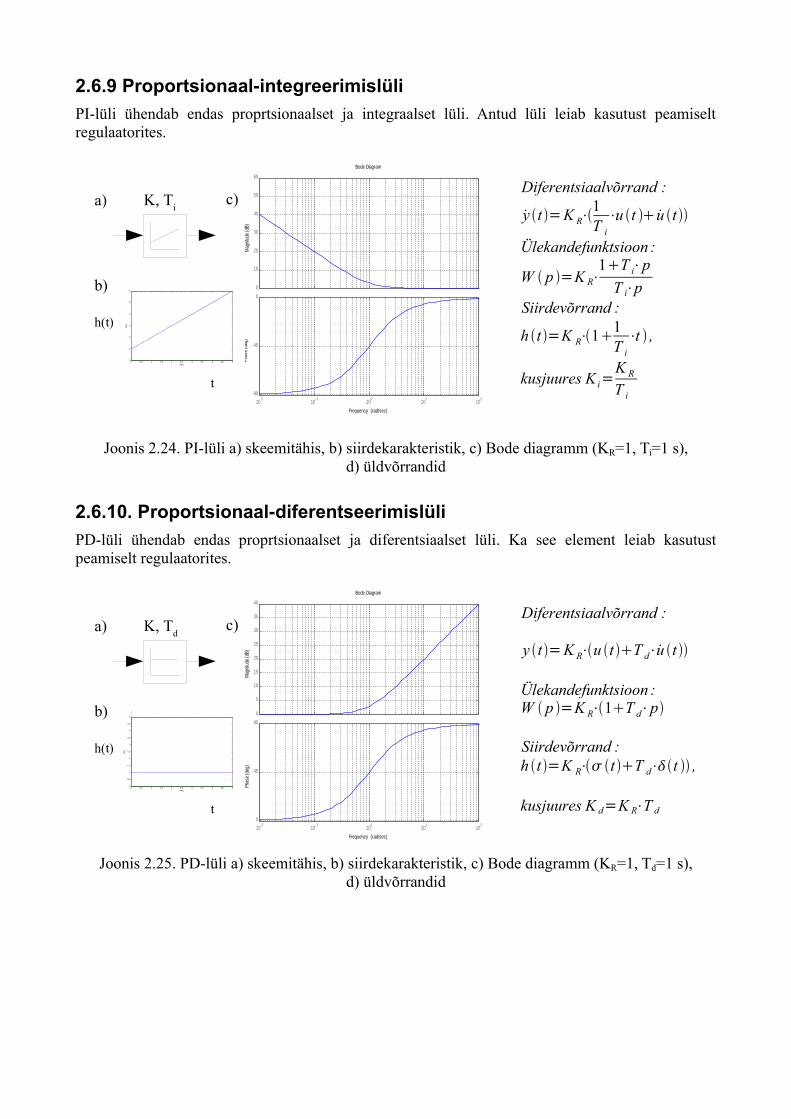
2.6.9 Proportsionaal-integreerimislüliPI-lüli ühendab endas proprtsionaalset ja integraalset lüli. Antud lüli leiab kasutust peamiselt regulaatorites.
Diferentsiaalvõrrand :
y t =K R⋅1T i⋅u t u t
Ülekandefunktsioon :
W p =K R⋅1T i⋅p
T i⋅pSiirdevõrrand :
h t =K R⋅11T i⋅t ,
kusjuures K i=K R
T i
Joonis 2.24. PI-lüli a) skeemitähis, b) siirdekarakteristik, c) Bode diagramm (KR=1, Ti=1 s),d) üldvõrrandid
2.6.10. Proportsionaal-diferentseerimislüliPD-lüli ühendab endas proprtsionaalset ja diferentsiaalset lüli. Ka see element leiab kasutust peamiselt regulaatorites.
Diferentsiaalvõrrand :
y t=K R⋅u t T d⋅u t
Ülekandefunktsioon :W p =K R⋅1T d⋅p
Siirdevõrrand :h t =K R⋅ t T d⋅t ,
kusjuures K d=K R⋅T d
Joonis 2.25. PD-lüli a) skeemitähis, b) siirdekarakteristik, c) Bode diagramm (KR=1, Td=1 s),d) üldvõrrandid
0
10
20
30
40
50
60
Mag
nitud
e (d
B)
10-2
10-1
100
101
102
-90
-45
0
45
90
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
K, Td, Ti
t
a)
b)
c)
h(t)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Aeg
h(t
)
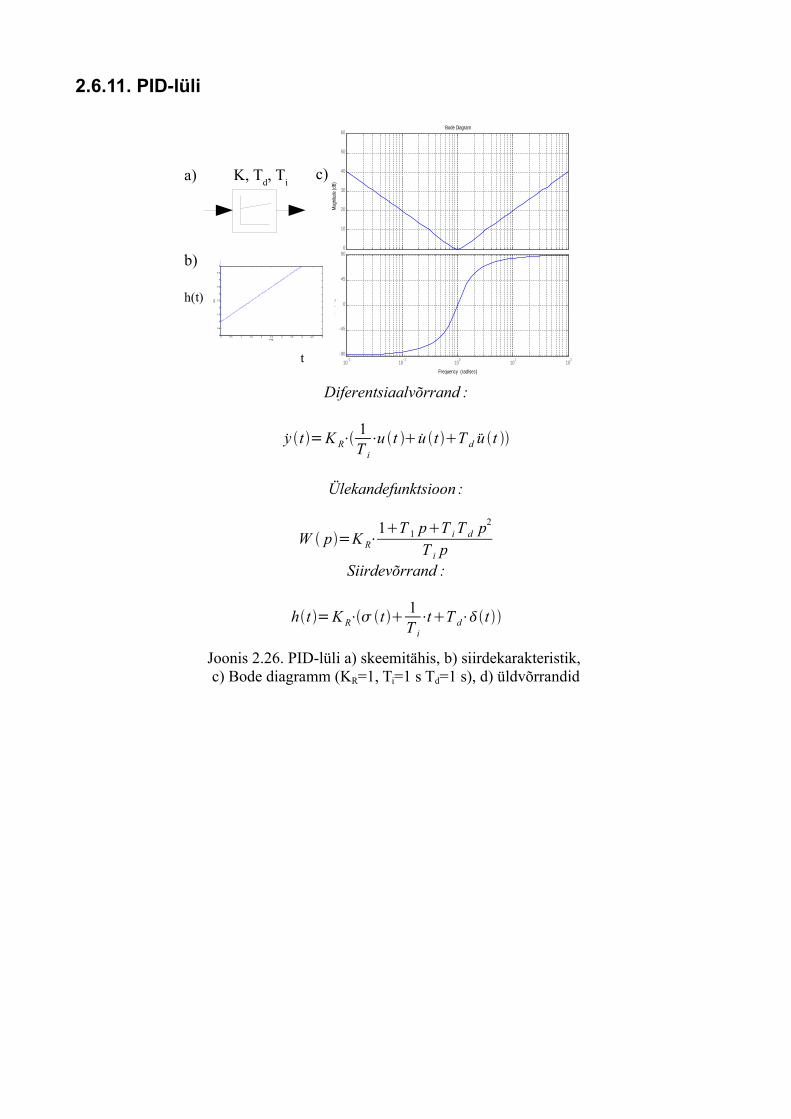
2.6.11. PID-lüli
Diferentsiaalvõrrand :
y t=K R⋅1T i⋅u t u t T d u t
Ülekandefunktsioon :
W p=K R⋅1T 1 pT iT d p2
T i pSiirdevõrrand :
ht =K R⋅ t 1T i⋅tT d⋅t
Joonis 2.26. PID-lüli a) skeemitähis, b) siirdekarakteristik, c) Bode diagramm (KR=1, Ti=1 s Td=1 s), d) üldvõrrandid