-
8/15/2019 2015 AP 07Solidos
1/24
Universidad Austral de ChileFacultad de Ciencias de la
Ingenierı́a
Instituto de Diseño y Métodos Industriales
DMIL131 - Estática y Mecánica SolidosIngenieŕıa Civil
Mecánica
1. Mecánica de Solidos
1.1. Introducción
En toda construccíon de ingenieŕıa, a las partes componentes
de una estructura o máquina se deben asignar tamaños
f́ısicos definidos. Estas partes deben ser adecuadamente
proporcionadas para resistir a las fuerzas reales o probables
que
puedan llegar a actuar sobre ellas. Aśı, las paredes de un
recipiente a presión deben tener la resistencia adecuada para
soportar la presión interior; los pisos de un edificio deben
ser lo suficientemente fuertes para el fin que est án
destinados;
la flecha, árbol o eje de una máquina debe ser de tamaño
adecuado para poder transmitir el par de torsi ón requerido.
De la misma manera las partes de una estructura compuesta deben
ser lo suficientemente ŕıgidas para no desviarse exce-
sivamente al operar bajo las cargas impuestas. El piso de un
edificio puede ser lo suficientemente fuerte y, sin embargo,
presentar deformaciones excesivas que en algunos casos pueden
causar desalineamiento de equipos de manufactura u otros.
En la practica de ingenieŕıa, tales requisitos deben cumplirse
con el mı́nimo gasto de materiales. Aparte del costo, a
veces, como el diseño de satélites, la factibilidad y el
éxito de un proyecto puede depender del peso de una carga. El
tema
de la mec ́anica de solidos o
resistencia de materiales , implica métodos analı́ticos para
determinar la resistencia, rigidez
y la estabilidad de diversos miembros sometidos a
cargas. (Popov, 2000)
1.2. Método de las secciones
Uno de los problemas principales de la mecánica de solidos es
la investigación de la resistencia interna de un cuerpo;
es decir, la naturaleza de las fuerzas que se generan
dentro de un cuerpo para equilibrar el efecto de las fuerzas
aplicadas
externamente . Para tal fin se emplea un método uniforme
de enfoque. Se prepara un croquis completo del miembro bajo
investigación, sobre el cual se muestran todas las fuerzas
externas que actúan sobre él en sus respectivos puntos de
apli-cación. Tal croquis se conoce como diagrama de cuerpo libre.
Todas las fuerzas que actúan sobre un cuerpo, incluidas las
fuerzas reactivas causadas por los soportes, ası́ como el peso
propio del cuerpo debido a su masa, son consideradas como
fuerzas externas. Además, como un cuerpo estable en reposo
está en equilibrio estático. Entonces, si las fuerzas que
actúan
sobre un cuerpo como el mostrado en la
Figura 1.1a satisfacen las ecuaciones de equilibrio y se
muestran todas actuando
sobre el, el croquis representa un diagrama de cuerpo libre.
Luego, como la determinación de las fuerzas internas causadas
por las fuerzas externas es uno de los fines principales
de esta ciencia, se pasa una sección arbitraria por el cuerpo
separándolo completamente en dos partes. El resultado de
tal proceso se observa en las Figura 1.1b, donde un
plano arbitrario ABCD separa el cuerpo original de la
Figura 1.1a
en dos partes distintas, a este proceso se le denomina
método de las secciones . Entonces, si todo el cuerpo
el cuerpo está
en equilibrio, entonces cualquier parte de el también estará
en equilibrio. Sin embargo, para tales partes de un cuerpo,
algunas fuerzas necesarias para mantener el equilibrio deben
actúan en la sección cortada. Estas consideraciones conducen
a la siguiente conclusion fundamental: Las fuerzas
aplicadas externamente a un lado de un corte arbitrario deben
ser
equilibradas por las fuerzas internas desarrolladas en el
corte o, brevemente, las fuerzas externas están
equilibradas por
las fuerzas internas. (Popov, 2000)
04/06/2015 Profesor: Roberto Cárdenas P.
Ayudante: Anibal Aguilera B. 2015-AP-07
-
8/15/2019 2015 AP 07Solidos
2/24
Universidad Austral de ChileFacultad de Ciencias de la
Ingenierı́a
Instituto de Diseño y Métodos Industriales
DMIL131 - Estática y Mecánica SolidosIngenieŕıa Civil
Mecánica
(a) (b)
Figura 1.1: a) Cuerpo original seccionado por el plano
ABCD, b) Cuerpos y fuerzas internas resultantes al seccionar
el cuerpo.Fuente: ( Popov, 2000 )
1.3. Esfuerzos
1.3.1. Esfuerzo Normal
El método de las secciones genera las bases para el estudio de
la mecánica de solidos, ahora se verán métodos para
determinar si los componentes pueden resistir una carga con
seguridad. Por ejemplo, el que la varilla B
C mostrada en la
Figura 1.2a pueda romperse o no hacerlo bajo esta
carga depende no s ólo del valor encontrando para la fuerza
interna
F BC en realidad representa la resultante de
las fuerzas elementales distribuidas a los largo de toda el area
A de la sección
transversal, y la intensidad de estas fuerzas distribuidas es
igual a la fuerza por unidad de área, F BC /A, en
la sección. El
hecho de que la varilla se rompa o no bajo la carga dada,
depende claramente de la capacidad que tenga el material de
soportar el valor correspondiente F BC de
las fuerzas internas distribuidas. Por lo tanto la resistencia a la
fractura dependede la fuerza F BC del área
transversal A y del material de la varilla. (Beer y
cols., 2004)
(a) (b)
Figura 1.2: a) Fuerzas internas distribuidas en el
area A, b) Miembro con carga axial. Fuente: ( Beer
y cols., 2004)
La fuerza por unidad de área, o la intensidad de las fuerzas
distribuidas a través de una sección dada, se llama esfuerzo
normal sobre esa seccíon y se representa con la letra griega
σ (sigma). El esfuerzo de un elemento con área
transversal A
sometido a una carga axial P
(Figura 1.2b) se obtiene, por lo tanto, al dividir la magnitud
P de la carga entre el área A.
σ = P
A (1.1)
-
8/15/2019 2015 AP 07Solidos
3/24
Universidad Austral de ChileFacultad de Ciencias de la
Ingenierı́a
Instituto de Diseño y Métodos Industriales
DMIL131 - Estática y Mecánica SolidosIngenieŕıa Civil
Mecánica
1.3.2. Esfuerzo Cortante
En el caso de los esfuerzos normales, tal como su nombre lo
indica, se trabaja con las fuerzas normales a la secci ón
considerada. Un tipo muy diferente de esfuerzo se obtiene cuando
se obtiene cuando se aplican cargas transversales
P y
P a un elemento AB (Figura 1.4a). Al
efectuar un corte en C entre los puntos de
aplicación de las dos fuerzas (Figura
1.4b), se obtiene el diagrama de la porción
AC que se muestra en la Figura 1.4c. Se
concluye que deben existir fuerzas
internas en el palo de la sección, y que su resultante es igual
a P . Estas fuerzas internas elementales se conocen
como
fuerzas cortantes y la
magnitud P de su resultante es el
cortante de la sección.
(a) (b) (c)
Figura 1.3: a) Miembro con cargas transversales, b)
Secci´ on arbitraria en el miembro, c) DCL porci´ on
seccionada AC . Fuente:( Beer y cols.,
2004)
Al dividir el cortante P entre el área A
de la sección transversal, se obtiene el esfuerzo cortante
promedio de la secci ón.
Representado el esfuerzo cortante con la letra griega
τ (tao), se escribe
τ prom = P
A (1.2)
Debe enfatizarse que el valor obtenido es un valor promedio para
el esfuerzo cortante sobre toda la sección. Al contra-
rio de lo dicho con anterioridad sobre los esfuerzos normales,
en este caso no puede suponerse que la distribuci ón de los
esfuerzos cortantes a través de una sección sea uniforme. El
valor real τ del esfuerzo cortante varia de cero
en la superficie
del elemento hasta un valor máximo τ max que
puede ser mucho mayor al valor promedio
τ prom.
Los esfuerzos cortantes se encuentra comúnmente en pernos,
pasadores y remaches utilizados para conectar diversos
elementos estructurales y componentes de máquinas. Considere
dos placas A y B conectadas por un perno
CD (Figura
1.4a).Si las placas se les somete a fuerzas de tension de
magnitud F , se desarrollaran esfuerzos en la sección
del perno quecorresponde al plano E E .
Al dibujar los diagramas del perno y de la porci ón localizada
sobre el plano EE (Figura 1.4c), se concluye que
el
cortante P en la sección es igual
a F . Se obtiene el esfuerzo cortante promedio de la
sección de acuerdo a la ecuación (1.2),
dividiendo el cortante P
= F entre el área A de la sección
transversal. (Beer y cols., 2004)
τ prom = P
A =
F
A (1.3)
Este ejemplo se conoce como cortante simple . Sin
embargo, pueden surgir diversas situaciones de carga.
-
8/15/2019 2015 AP 07Solidos
4/24
Universidad Austral de ChileFacultad de Ciencias de la
Ingenierı́a
Instituto de Diseño y Métodos Industriales
DMIL131 - Estática y Mecánica SolidosIngenieŕıa Civil
Mecánica
(a) (b) (c)
Figura 1.4: a) Perno sometido a cortante simple, b)
Secci´ on arbitraria en el perno, c) DCL porci´ on
seccionada del perno CD .Fuente: ( Beer y cols.,
2004)
Otra forma de cortante sucede en las placas de empalme, donde
las placas C y D se emplean para
conectar las placas
A y B (figura 1.5a), el corte tendrá
lugar en el perno H J en cada uno de los
planos K K y LL (al igual que el perno E
G).
Se dice que los pernos están en corte doble . Para
determinar el esfuerzo cortante promedio de cada plano, se dibujan
losdiagrama de cuerpo libre del perno H J y de la
porción del perno localizada entre los dos planos
(Figura 1.5c). Observando
que el corte P en cada una de las secciones es
P = F /2, se concluye que el esfuerzo
cortante promedio es
τ prom = P
A =
F/2
A =
F
2A (1.4)
(a) (b) (c)
Figura 1.5: a) Pernos sometidos a cortante doble, b)
Secci´ on arbitraria en el perno, c) DCL porci´ on
seccionada del perno HJ .Fuente: ( Beer y cols.,
2004)
1.3.3. Esfuerzo de apoyo en conexiones
Los pernos, pasadores y remaches crean esfuerzos en la
superficie de apoyo o superficie de contacto de los elementosque
conectan. Por ejemplo considere las dos placas A y
B conectadas por un perno CD que se
analizaron previamente
(Figura 1.4a). El perno ejerce una fuerza
P sobre la placa A igual y opuesta a
la fuerza F ejercida por la placa sobre el
perno (Figura 1.6a). La fuerza
P representa la resultante de las fuerzas
elementales distribuidas en la superficie interior
de un medio cilindro de diámetro d y longitud
t igual al espesor de la placa. Como la distribuci ón
de estas fuerzas y los
esfuerzos correspondientes es muy complicada, en la practica se
utiliza un valor fijo nominal promedio σ p para el
esfuerzo,
llamado esfuerzo de apoyo, que se obtiene al dividir la carga
P entre el área del rectángulo que representa
la proyección
del perno sobre la sección de la placa (Figura 1.6b).
Debido a que esta area es igual a td, donde t es
el espesor de la placa
y d el diámetro del perno, se tiene que
σ p =
P
A =
P
td (1.5)
-
8/15/2019 2015 AP 07Solidos
5/24
(a) (b)
Figura 1.6: a) Fuerza ejercida por el perno sobre la
placa, b) Secci´ on del perno que afecta a la placa. Fuente:
( Beer y cols., 2004)
1.3.4. Esfuerzos en un plano oblicuo bajo carga axial
Anteriormente se encontraron las fuerzas axiales ejercidas en un
elemento sometido a dos fuerzas (Figura 1.1a) causan
esfuerzos normales en ese elemento (Figura 1.1b), mientras
que también se encontró que las fuerzas transversales
ejercidas
sobre pernos y pasadores (Figura 1.4a) causan esfuerzos
cortantes en esas conexiones (Figura 1.4c). La razón de que
tal re-
lación observada entre las fuerzas axiales y los esfuerzos
normales, por una parte, y las fuerzas transversales y los
esfuerzos
cortantes, por la otra, fue que los esfuerzos se determinaron
únicamente en los planos perpendiculares al eje del elemento
o conexión. Como se vera en esta sección, las fuerzas axiales
causan esfuerzos tanto normales como cortantes en planos
que no son perpendiculares al eje del elemento. De manera
similar, las fuerzas transversales ejercidas sobre un perno o
pasador producen esfuerzos tanto normales como cortantes en
planos que no son perpendiculares al eje del perno o pasador.
Considere el elemento de dos fuerzas de la Figura 1.7a, que
se encuentra sometido a cargas axiales P
y P . Si se realiza
un corte en dicho elemento, que forme un ángulo θ
con un plano normal (Figura 1.7a) y se dibuja el DCL de
la porción
de elemento localizada a la izquierda de ese corte
(Figura 1.7b), se encuentra a partir de las condiciones de
equilibrio del
cuerpo libre que las fuerzas distribuidas que actúan en la
sección deben ser equivalentes a la fuerza P .
(a) (b)
Figura 1.7: a) Miembro sometido a carga axial con una
sección transversal, b) Corte transversal del miembro. Fuente:
( Beer y cols., 2004)
Separando P en sus componentes
F y V , que son, respectivamente normal
y tangencial al corte (Figura 1.8a), se tiene
que
F = P · cos(θ) V
= P · sen(θ) (1.6)
La fuerza N representa la resultante de las
fuerzas normales distribuidas a través de la sección, y la
fuerza V la resultante
de las fuerzas cortante (Figura 1.8b). Los valores
promedio de los esfuerzos normales y cortantes correspondientes
se
obtienen dividiendo, respectivamente, N
y V entre el area Aθ de la
sección:
σ = N
Aθτ =
V
Aθ(1.7)
04/06/2015 Profesor: Roberto Cárdenas P.
Ayudante: Anibal Aguilera B. 2015-AP-07
-
8/15/2019 2015 AP 07Solidos
6/24
(a) (b)
Figura 1.8: a) DCL miembro con corte transversal, b)
Esfuerzos normal y de corte en la secci´ on transversal.
Fuente: ( Beer y cols.,2004)
Al sustituir los valores de N y
V de la ecuación (1.6) en la ecuación (1.7), y
observando de la Figura 1.8a que
A0 = Aθcos(θ) o Aθ = A0/cos(θ),
donde A0 denota el área de un sección perpendicular
al eje del elemento, de lo que se
obtiene
σ = P · cos(θ)
A0/cos(θ) τ =
P · sen(0)
A0/cos(θ) (1.8)
Las ecuaciones (1.8) se pueden reescribir como
σ = P A0cos2(θ) = P 2A0
(1 + cos(2θ)) τ = P A0cos(θ) ·
sin(θ) = P 2A0
sen(2θ) (1.9)
De la primera de las ecuaciones (1.9) se observa que el valor
del esfuerzo normal σ es el máximo cuando θ
= 0, es decir,
cuando el plano de la sección es perpendicular al eje del
elemento, y que se aproxima a cero al aproximarse θ a
90o. Se
verifica que el valor de σ cuando θ = 0
es
σm = P
A0(1.10)
La segunda de las ecuaciones (1.9) muestra que el esfuerzo
cortante τ es cero para θ = 0 y para
θ = 90o, y que para
θ = 45o alcanza su valor máximo.
τ m = P
A0cos(45o) · sin(45o) =
P
2A0(1.11)
La primera de las ecuaciones (1.9) indica que, cuando
θ = 45o, el esfuerzo normal σ también es igual
a P /2Aθ
σ = P
A0cos2(45o) =
P
2A0(1.12)
Los resultados obtenidos de las ultimas ecuaciones se muestran
gráficamente en la Figura 1.9.
Figura 1.9: Esfuerzos normales y de corte para distintos
´ angulos, Fuente: ( Beer y cols., 2004)
04/06/2015 Profesor: Roberto Cárdenas P.
Ayudante: Anibal Aguilera B. 2015-AP-07
-
8/15/2019 2015 AP 07Solidos
7/24
-
8/15/2019 2015 AP 07Solidos
8/24
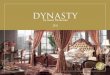
(a) (b) (c)
Figura 1.11: a) El ´ angulo de torsi´ on se
incrementa conforme x aumenta, b)
Deformaci´ on cortante unitaria del elemento, c)Elemento
infinitesimal perteneciente a la flecha. Fuente: ( Hibbeler,
2006 )
Este ángulo, γ , está indicado sobre el elemento.
Puede relacionarse con la longitud ∆x del elemento y con la
diferencia
en el ángulo de rotación, ∆φ, entre las caras sombreadas. Si
∆x → dx y ∆φ → dφ, se tiene
BD = ρdφ = dxγ (1.14)
Por tanto,
γ = ρdφ
dx (1.15)
Puesto que dx y dφ son iguales para
todos los elementos situados en puntos dentro de la sección
transversal en
x, entonces dφ/dx es constante y la ecuación (1.15)
establece que la magnitud de la deformación unitaria cortante
para
cualquiera de estos elementos vaŕıa solo con su distancia
radial ρ desde el eje de la flecha. En otras palabras,
la deformación
unitaria cortante dentro de la flecha vaŕıa linealmente a lo
largo de cualquier ĺınea radial, desde cero con el eje de la
flecha
hasta un máximo γ máx en su periferia, Figura
1.12. Como dφ/dx = γ/ρ =
γ máx/c, entonces
γ =ρ
c
γ máx (1.16)
Los resultados obtenidos aqúı también son válidos para tubos
circulares. Dependen sólo de las hipótesis con respecto
a las deformaciones mencionadas arriba.
Figura 1.12: La deformaci´ on unitaria cortante del
material crece linealmente con ρ, Fuente:
( Hibbeler , 2006 )
04/06/2015 Profesor: Roberto Cárdenas P.
Ayudante: Anibal Aguilera B. 2015-AP-07
-
8/15/2019 2015 AP 07Solidos
9/24
1.4.1. La fórmula de la torsión
Si una flecha está sometida a un par de torsión externo,
entonces, por equilibrio debe desarrollarse un par de torsión
interno en la flecha. En esta sección se desarrollara una
ecuación que relacione la distribución del esfuerzo cortante con
el
par de torsión interno resultante en la sección de una flecha
o tubo circular.
Si el material es elástico lineal, entonces es aplicable la ley
de Hooke, τ = Gγ y en
consecuencia, una variaci´ on lineal
de la deformaci´ on unitaria cortante . Por tanto, al
igual que la variación de la deformación unitaria cortante en una
flecha
solida, τ variará desde cero en el eje
longitudinal de la flecha hasta un valor máximo, taumáx, en
su periferia. Esta variación
se muestra en la Figura 1.13 sobre las caras
frontales de un número selecto de elementos situados en una
posición radia
intermedia ρ y en el radio exterior c. Debido a
la proporcionalidad de los triángulos, o bien utilizando la ley de
hooke y
la ecuación (1.16), se puede escribir
τ =ρ
c
τ máx (1.17)
Esta ecuación expresa la distribución del esfuerzo cortante
como una función de la posición radial ρ del
elemento;
en otras palabras, define la distribución del esfuerzo en
términos de la geometŕıa de la flecha. Usándola, se aplica
la
condición que requiere que el par de torsión producido por la
distribución del esfuerzo sobre toda la sección transversal
sea equivalente al par de torsión interno T en
la sección, lo cual mantiene a la flecha en equilibrio, Figura
1.13.
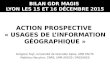
Figura 1.13: El esfuerzo cortante vaŕıa linealmente a lo
largo de toda la ĺınea radial de la secci´ on transversal,
Fuente: ( Hibbeler ,2006 )
Espećıficamente, cada elemento de área dA, situado en
ρ, está sometido a una fuerza dF =
τ dA. El par de torsión
producido por esta fuerza es dT = ρ(τ
dA). Por tanto, para la sección transversal entera:
T = A
ρ(τ dA) = A
τ
ρc
τ máxdA (1.18)
Puesto que τ máx/c es constante,
T = τ máx
c
A
ρ2dA (1.19)
04/06/2015 Profesor: Roberto Cárdenas P.
Ayudante: Anibal Aguilera B. 2015-AP-07
-
8/15/2019 2015 AP 07Solidos
10/24
La integral en esta ecuación depende sólo de la geometŕıa de
la flecha. Representa el momento polar de inercia del área
de la sección transversal de la flecha calculado con respecto
al eje longitudinal de la flecha. Este valor se simboliza como
J , y por lo tanto la ecuación anterior puede escribirse
en una forma más compacta como
τ máx = T c
J (1.20)
Dondeτ máx = Esfuerzo cortante máximo en la flecha,
el cual ocurre en la superficie exterior.
T = Par de torsión interno resultante que actúa en
la sección transversal.
J = Momento polar de inercia del área
transversal
c = Radio exterior de la flecha
Utilizando las ecuaciones (1.17) y (1.20), el esfuerzo cortante
en la distancia intermedia ρ puede ser determinado
a
partir de una ecuación similar:
τ = T ρ
J
(1.21)
Cualquiera de las dos ecuaciones anteriores suele
llamarse f´ ormula de la torsi´ on . Recordemos
que se utiliza solamente
cuando la flecha es circular y el material homogéneo y se
comporta de manera elástico-lineal.
1.4.2. Flecha sólida
Si la flecha tiene una sección transversal circular solida, el
momento de inercia polar J esta dado por
J = π
2c4 (1.22)
1.4.3. Flecha tubular
Si una flecha tiene una sección transversal tubular, con un
radio interior ci y un radio exterior co, la
inercia polar J
esta dada por
J = π
2(c4o − c
4io) (1.23)
En cualquier sección transversal dada de la flecha, el
esfuerzo cortante máximo se presenta en la superficie
exterior.
Figura 1.14: Distribuci´ on del esfuerzo cortante en
flechas circulares, Fuente: ( Beer y cols., 2004)
04/06/2015 Profesor: Roberto Cárdenas P.
Ayudante: Anibal Aguilera B. 2015-AP-07
-
8/15/2019 2015 AP 07Solidos
11/24
1.4.4. Ángulo de torsión
Se deducirá una relación entre el ángulo de giro φ
de un eje circular y el par de torsión T
ejercido sobre el eje. Se
supondrá que la totalidad del eje permanece elastica.
Considerando primero el caso de un eje de longitud L
y sección
transversal uniforme de radio c sujeto a un par de
torsión T en su extremo libre, se sabe que el
ángulo de giro φ y la
deformación máxima cortante τ máx se
relacionan como sigue
γ máx = cφL
(1.24)
Pero, en el rango elástico, el esfuerzo de cedencia no se
excede en ninguna parte del eje, se aplica la ley de Hooke y se
tiene que γ máx = τ máx/G, o a
partir de la ecuación (1.20)
γ máx = τ máx
G =
T c
JG (1.25)
Igualando los miembros de la derecha de las ecuaciones ( 1.14) y
(1.25), y despejando φ se tiene que
φ = T L
JG (1.26)
Donde φ se expresa en radianes. La relación
obtenida muestra que, dentro del rango elástico, el ángulo de
giro φ esproporcional al par de
torsión T aplicado al eje.
(Hibbeler, 2006)
1.4.5. Transmisión de potencia
Las flechas y los tubos que tienen secciones transversales
circulares a menudo se utilizan para transmitir potencia
desarrollada por una máquina. Cuando se usan para este fin,
quedan sometidos a pares de torsi ón que dependen de la
potencia generada por la máquina y de la velocidad angular de
la flecha. La potencia se define como el trabajo efectuado
por unidad de tiempo. El trabajo transmitido por una flecha en
rotación es igual al par de torsión aplicado por el ángulo
de rotación. Por tanto, si durante un instante de tiempo
dt un par de torsión aplicado
T ocasiona que la flecha gire un
ángulo dθ , entonces la potencia instantánea es:
P = T dθ
dt (1.27)
Puesto que la velocidad angular es ω = dθ/dt,
la potencia se puede expresar como:
P = T ω (1.28)
Figura 1.15: Transmisi´ on de potencia desde una
turbina a un generador mediante un eje, Fuente: ( Beer y
cols., 2004)
04/06/2015 Profesor: Roberto Cárdenas P.
Ayudante: Anibal Aguilera B. 2015-AP-07
-
8/15/2019 2015 AP 07Solidos
12/24
1.5. Flexión
1.5.1. Deformación por flexión de un miembro recto
Se estudiaran las deformaciones que ocurren cuando una viga
prismática recta de un material homogéneo está sometida
a flexión. El análisis se limitará a vigas con secciones
transversales simétricas respecto a un eje y el momento
flexionante
se encuentra aplicado con respecto a un perpendicular a este eje
de simetŕıa, como se muestra en la Figura 1.16.
Figura 1.16: Momento flexionante aplicado sobre una viga,
Fuente: ( Hibbeler , 2006 )
Utilizando un material sumamente deformable como el hule,
podemos ilustrar f́ısicamente qué sucede cuando un
miembro prismático recto esta sometido a un momento
flexionante. Considerando, por ejemplo, la barra no deformada en
la
Figura 1.17a que tiene una sección transversal
cuadrada y está marcada con una reticula formada por ĺıneas
longitudinales
y transversales. Al aplicar un momento flexionante, este tiende
distorsionar estas ĺıneas según el patron mostrado en la
Figura 1.17b. Puede verse aqúı que las ĺıneas
longitudinales se curvan y que las ĺıneas transversales permanecen
rectas
pero sufren una rotación.
(a) (b)
Figura 1.17: a) Viga no deformada, b) Viga deformada al
aplicar un momento flexionante. Fuente:
( Hibbeler , 2006 )
El comportamiento de cualquier barra deformable sometida a un
momento flexionante es tal que el material en la
porción inferior de la barra se alarga y el material en la
porci ón superior se comprime. En consecuencia, entre esas dos
regiones debe haber una superficie, llamada superficie neutra o
eje neutro, en la que las fibras longitudinales del material
no representa un cambio en la longitud, Figura 1.16.
04/06/2015 Profesor: Roberto Cárdenas P.
Ayudante: Anibal Aguilera B. 2015-AP-07
-
8/15/2019 2015 AP 07Solidos
13/24
Con base en estas observaciones, se realizan las siguientes tres
hipótesis relativas a la manera en que el esfuerzo deforma
al material. La primera es que el eje longitudinal x, que
se encuentra en la superficie neutra, Figura 1.18a, no
experimenta
cambio de longitud. El momento tiende a deformar la viga en
forma tal que esta lı́nea se vuelve una linea curva contenida
en el plano x − y de simetrı́a, Figura 1.18b.
La segunda hipótesis es que todas las secciones transversales de
la viga per-
manecen planas y perpendiculares al eje longitudinal durante la
deformación de la sección transversal dentro de su propio
plano será despreciada, Figura 1.17b. En particular, el
eje z , contenido en el plano de la sección transversal y
respecto al
cual gira la sección se llama, eje neutro,
Figura 1.18b.
(a) (b)
Figura 1.18: a) Viga no deformada , b)Viga deformada al
aplicar un momento flexionante. Fuente:
( Hibbeler , 2006 )
Para mostrar cómo esta distorsión deforma el material, se
aı́sla un segmento de la viga localizado a una distancia x
a
lo largo de la longitud de la viga y con un espesor no deformado
∆x, Figura 1.19a. Este elemento, tomado de la viga,
se
muestra en vista de perfil en sus posiciones no deformada y
deformada en la Figura 1.19 . Note que cualquier
segmento
de ĺınea ∆x, localizado sobre la superficie neutra, no cambia
de longitud, mientras que cualquier segmento de linea ∆ s
localizado a una distancia arbitraria y sobre la superficie
neutra, se contraer á y tendrá la longitud ∆s después que la
deformación ha tenido lugar. Por definición, la deformación
unitaria normal a lo largo de ∆s se determina con la
ecuación
= ĺım∆x→0
∆s
−∆s∆s
(1.29)
Representando ahora esta deformación unitaria en términos de
la posición y del segmento y del radio de curvatura
ρ
del eje longitudinal del elemento. Antes de la deformación ∆x
= ∆s, Figura 1.19a. Después de la deformación ∆x
tiene
un radio de curvatura ρ, con centro de curvatura en el
punto O, Figura 1.19b. Como ∆θ define el ángulo
entre los dos
lados de la sección transversal del elemento ∆x = ∆s
= ρ∆θ. De la misma manera, la longitud deformada de
∆s es
∆s‘ = (ρ − y)∆θ. Sustituyendo en la ecuación anterior, se
obtiene
= −y
ρ (1.30)
Este resultado indica que la deformación unitaria normal
longitudinal de cualquier elemento dentro de la viga depende
de su localización y sobre la sección transversal y
del radio de curvatura del eje longitudinal de la viga en el punto.
En otras
palabras, para cualquier sección transversal espećıfica, la
deformación unitaria normal longitudinal variará linealmente
con y desde el eje neutro. Una contracción (−)
ocurrirá en fibras situadas arriba del eje neutro (+y), mientras
que se
presentarán alargamientos (+) en fibras localizadas debajo del
eje (−y).
04/06/2015 Profesor: Roberto Cárdenas P.
Ayudante: Anibal Aguilera B. 2015-AP-07
-
8/15/2019 2015 AP 07Solidos
14/24
(a) (b)
Figura 1.19: a) Elemento no deformado, b) Elemento
deformado. Fuente: ( Hibbeler , 2006 )
La deformación unitaria máxima ocurre en la fibra extrema,
situada a una distancia c del eje neutro. Utilizando
la
ecuación (1.30), como máx = c/ρ,entonces por
division se tiene
máx = −y/ρ
c/ρ (1.31)
De manera que
= −y
c
máx (1.32)
1.5.2. La fórmula de la flexión
Se desarrollara una ecuación que relacione la distribución del
esfuerzo longitudinal en una viga con el momento de
flexión interno resultante que actúa sobre la sección
transversal de la viga. Para hacer esto, se supondrá que el
material
se comporta de manera elástica lineal, por lo que es aplicable
la ley de Hooke, esto es, σ = E. Una variación
lineal de la
deformación unitaria normal, Figura 1.20a, debe ser
entonces la consecuencia de un variación lineal de esfuerzo
normal,
Figura 1.20c. Por tanto, igual que la variación de
deformación unitaria normal, σ variará de cero en
el eje neutro del
miembro a un valor máximo σmáx en puntos a la
distancia c máxima desde el eje neutro. Por
triángulos semejantes, Figura
1.20c, o utilizando la ley de hooke y la ecuación (1.32), se
puede escribir
σ = −y
c
σmáx (1.33)
Esta ecuación representa la distribución del esfuerzo sobre la
sección transversal. Para un M positivo actuando
en la
dirección +z, valores positivos de y dan valores
negativos para σ, esto significa que son esfuerzo de
compresión, ya queactúa en la dirección negativa de x. Caso
contrario, valores negativos de y darán valores
positivos o de tensión para σ . Si
se selecciona un elemento de volumen de material en un punto
especifico sobre la secci ón transversal, sólo esos esfuerzos
normales de tensión o compresión actuaran sobre él.
04/06/2015 Profesor: Roberto Cárdenas P.
Ayudante: Anibal Aguilera B. 2015-AP-07
-
8/15/2019 2015 AP 07Solidos
15/24
(a) (b) (c)
Figura 1.20: a) Variaci´ on de la deformaci´ on
unitaria normal, b) Variaci´ on del esfuerzo de
flexi´ on, c) Variaci´ on del esfuerzo
de flexi´ on . Fuente:
( Hibbeler , 2006 )
La posición del eje neutro sobre la sección transversal se
puede localizar satisfaciendo la condición de que la fuerza
resultante producida por la distribución del esfuerzo sobre la
sección transversal debe ser igual a cero. Notando que la
fuerza dF = σdA actúa sobre el
elemento arbitrario dA en la Figura 1.20b, se
requiere que F R = ΣF x, entonces
0 =
A
dF =
A
σdA
=
A
−
yc
σmáxdA
= −σmáx
c
A
dA
Como σmáx/x es distinto a cero, entonces
A
ydA = 0 (1.34)
En otras palabras, el momento estático de la sección
transversal del miembro respecto al eje neutro debe ser cero.
Estacondición sólo puede ser satisfecha si el eje neutro es
tambíen el eje centroidal de la sección transversal. En
consecuencia,
una vez determinado el centroide de la sección transversal del
miembro, se conoce tambíen la posición del eje neutro.
Se puede determinar el esfuerzo en la viga a partir del
requisito de que el momento interno resultante M
debe ser
igual al momento producido por la distribución del esfuerzo
respecto al eje neutro. El momento de dF en la
Figura 1.20b
respecto al eje neutro es dM =
ydF . Este momento es positivo ya que, por la regla de
la mano derecha, el pulgar está
dirigido a lo largo del eje positivo z cuando los
dedos se curvan según el sentido de rotación causado por
dM . Como
dF = σdA, usando la
ecuación 1.33, se tiene para la sección transversal
total, (M R)z = ΣM z, entonces
M = A
ydF = A
y(σdA) = A
y yc
σmáx dA (1.35)o
M = σmáx
c
A
y2dA (1.36)
La integral en esta ecuación representa el momento de inercia
de la sección transversal de la viga respecto al eje neutro,
se denota con I . De la ecuación (1.36) se despeja
σmáx y se escribe en forma general como
04/06/2015 Profesor: Roberto Cárdenas P.
Ayudante: Anibal Aguilera B. 2015-AP-07
-
8/15/2019 2015 AP 07Solidos
16/24
σmáx = Mc
I (1.37)
Donde
σmáx = Esfuerzo normal máximo en el miembro
M = Momento interno resultante, determinado con el
método de las secciones
y las ecuaciones de equilibrio. Se calcula con respecto al eje
neutro de la sección transversal.
I = Momento de inercia de la sección transversal
calculado respecto al eje neutro.
c = Distancia perpendicular del eje neutro al punto m ás
alejado de este eje
y sobre el cual actúa σmáx.
1.6. Esfuerzo cortante transversal
La fuerza cortante V es el resultado de una
distribución de esfuerzo cortante transversal que actúa sobre la
sección
transversal de la viga, figura 1.21 . Debido a la
propiedad complementaria del cortante, note que los esfuerzos
cortantes
longitudinales asociados actúan también a lo largo de planos
longitudinales de la viga. Por ejemplo, un elemento t́ıpico
retirado del punto interior sobre la sección transversal está
sometido a esfuerzos de cortante transversal y longitudinal
como se muestra en la figura 1.21.
Figura 1.21: Fuerzas cortantes sobre una viga, Fuente:
( Hibbeler, 2006 )
Se puede ilustrar f́ısicamente la razón por la cual se
desarrolla el esfuerzo cortante en los planos longitudinales de
una
viga que soporta una carga cortante interna, considerando que la
viga se compone de tres tablones, figura 1.22a. Si
las
superficies son lisas y éstos no están unidos entre sı́,
entonces la aplicación de la carga P ocasionará
que se deslicen uno
con respecto al otro, y aśı la viga se deflexionaŕa como se
muestra. Por otra parte, si las tablas est án unidas entre
śı,
entonces los esfuerzos cortante longitudinales entre ellos
evitarán su deslizamiento relativo y, por consiguiente, la
viga
actuara como una sola unidad, figura 1.22b .
(a) (b)
Figura 1.22: a) Tablas separadas entre si , b)Tablas
unidas entre si. Fuente:
( Hibbeler , 2006 )
04/06/2015 Profesor: Roberto Cárdenas P.
Ayudante: Anibal Aguilera B. 2015-AP-07
-
8/15/2019 2015 AP 07Solidos
17/24
Como resultado del esfuerzo cortante interno, se desarrollarán
deformaciones cortantes que tenderán a distorsionar
el sección transversal de manera una tanto completa. Por
ejemplo, considere una barra hecha de un material altamente
deformable y marcada con lı́neas reticulares horizontales y
verticales como se muestra en la figura . Cuando se aplica
una fuerza cortante V , ésta tiende a deformar las
ĺıneas de la manera mostrada en la figura . En general, la
distribución
de la deformación por cortante no uniforme sobre la sección
transversal ocasionará que ésta se alabee, es decir, que no
permanezca plana.
(a) (b)
Figura 1.23: a) Viga antes de la deformaci´ on ,
b)Viga después de la deformaci´ on. Fuente: ( Hibbeler,
2006 )
1.6.1. Fórmula del esfuerzo cortante
El desarrollo de una relación entre la distribución del
esfuerzo cortante que actúa sobre la sección transversal de
una
viga y la fuerza cortante resultante en la sección, se basa en
el estudio del esfuerzo cortante longitudinal y el resultado de
la ecuación V = dM/dx. Para mostrar
cómo se establece esta relación se considera un elemento tomado
de la viga en la
figura 1.24a y mostrado en la figura 1.24b. Un
diagrama de cuerpo libre del elemento que muestra sólo la
distribución del
esfuerzo normal que actúa sobre él se observa en la
figura 1.24b.
(a) (b) (c)
Figura 1.24: Fuente:
( Hibbeler , 2006 )
Esta distribución es causada por los momentos flexionantes
M y M + dM . Se han
excluidos los efectos de V , V +
dV
y w(x) debido a que estas cargas son verticales y no
aparecen en la sumatoria de fuerzas horizontales. El elemento de
la
figura 1.24c satisface la
ecuación F x = 0 puesto que la distribución a cada
lado del elementos forma sólo una par y portanto se tiene una
fuerza resultante nula.
Considerando el segmento superior sombreado del elemento que ha
sido seleccionado a una distancia y desde el eje
neutro, figura 1.24c. Este segmento tiene un ancho
t en la sección y los lados transversales tienen
cada uno un área A.
Puesto que los momentos resultantes a cada lado del elemento
difieren en dM , puede verse en la figura que
F x = 0 no
será satisfecha a menos que actúe un esfuerzo longitudinal
τ sobre la cara del fondo del segmento.
04/06/2015 Profesor: Roberto Cárdenas P.
Ayudante: Anibal Aguilera B. 2015-AP-07
-
8/15/2019 2015 AP 07Solidos
18/24
(a) (b)
Figura 1.25: a) Vista tridimensional , b)Vista de perfil.
Fuente: ( Hibbeler , 2006 )
En el siguiente análisis se supondrá que este esfuerzo
cortante es constante a través del ancho t de la cara
del fondo.
Este esfuerzo actúa sobre el área t dx. Aplicando la
ecuación del equilibrio de fuerzas horizontales y la f órmula de
flexión,
ecuación (1.37), se tiene
+←F x = 0 :
A
σ dA − A
σ dA − τ (t dx) = 0
A
M + dM
I
y dA −
A
M
I
y dA − τ (t dx) = 0
dM
I
A
y dA = τ (t dx) (1.38)
Despejando τ , se obtiene
τ = 1
I t
dM
dx
A
y dA (1.39)
Esta ecuación puede simplificarse observando que
V = dM/dx. La integral representa tambíen
el primer momento de
área A
respecto al eje neutro. Denotaremos este momento con el śımbolo
Q. Como la posición del centroide del área A
se determina con ȳ = A
y dA/A se puede escribir.
Q =
A
y dA = ȳA (1.40)
Por lo tanto, el resultado final es
τ = V Q
It (1.41)
Donde
τ = Esfuerzo cortante en el miembro en un punto
situado a una distancia y del eje neutro.
V = Fuerza cortante interna resultante.
I = Momento de inercia de toda la sección
transversal respecto al eje neutro.
t = Ancho de la sección transversal del miembro en el
punto que se va a determinar τ .
Q =
A
y dA = ȳA, donde A es la porción superior o
inferior del área transversal del miembro
considerada desde la sección en que se mide t, ȳ es la
distancia del centroide de A al eje neutro.
04/06/2015 Profesor: Roberto Cárdenas P.
Ayudante: Anibal Aguilera B. 2015-AP-07
-
8/15/2019 2015 AP 07Solidos
19/24
1.7. Ejemplos
I.- La barra mostrada en la figura 1.26 presenta
una altura constante de 35 [mm] y 10 [mm] de espesor. Determine
el
esfuerzo normal promedio máximo que se encuentra sometida la
barra bajo el estado de carga mostrado.
Figura 1.26
Solución Primero se debe seccionar la barra en
segmentos, estos segmentos coinciden con los intervalos donde
las
cargas aplicadas sobre la barra cambian (figura 1.27).
Figura 1.27
Mediante las ecuaciones de equilibrio es posible determinar los
valores de las fuerzas internas P AB,
P BC y P CD
mostradas en la figura 1.27. Una vez determinadas
las fuerzas internas, se recomienda realizar un gr áfico de
fuerzas
internas vs posición (figura 1.28), que permite
determinar cual es el punto o intervalo donde las fuerzas internas
son
mayores.
Figura 1.28
De acuerdo a la figura 1.28, la mayor fuerza interna
de la barra corresponde a P BC = 30
[kN ]. Al presentar la barra un
área constante en toda su longitud, el esfuerzo normal máximo
está condicionado solamente por la fuerza interna máxima1 .
Aplicando la formula de esfuerzo normal (ecuación (1.1)), se
tiene
σBC = P BC
A =
30(103) [N ]
(0, 035 [m])(0, 010 [m]) = 85, 7 [MP a]
1En caso de que el área de la barra fuera variable, se debe
evaluar el esfuerzo normal en cada intervalo.
04/06/2015 Profesor: Roberto Cárdenas P.
Ayudante: Anibal Aguilera B. 2015-AP-07
-
8/15/2019 2015 AP 07Solidos
20/24
II.- Determine el esfuerzo cortante en el pin de 20 [ mm]
de diámetro ubicado en A y el pin de 30 [mm] de
diámetro
ubicado en B que soportan la viga mostrada en la
figura 1.29.
Figura 1.29
Solución Las fuerzas ejercidas sobre los pasadores se
obtienen realizando el diagrama de cuerpo libre de la viga
(figura 1.30a) y aplicando las condiciones de
equilibrio.
M A = 0 F B ·
4
5 · (6 [m]) − (30 [kN ])(2 [m]) = 0
F x = 0 12, 5 [kN ] −Ax = 0F y =
0 Ay + 12, 5 ·
3
5 [kN ] − 30 [kN ] = 0
Del sistema de ecuaciones se obtiene
Ay = 20 [kN ] Ax = 7, 5 [kN ]
F B = 12, 5 [kN ]
De acuerdo a esto, la fuerza resultante sobre el pasador A
es
F A =
A2x + A2y =
(7, 5 [kN ])2 + (20 [kN ])2 = 21, 36
[kN ]
(a) (b) (c)
Figura 1.30
04/06/2015 Profesor: Roberto Cárdenas P.
Ayudante: Anibal Aguilera B. 2015-AP-07
-
8/15/2019 2015 AP 07Solidos
21/24
El pasador A se encuentra sujeto mediante dos placas
fijas, el diagrama de cuerpo libre del segmento central del
pasador
se muestra en la figura 1.30b, este segmento presenta
dos superficies de cizalladura entre la viga y cada placa. Este
caso
se denomina cortante doble , por lo tanto la fuerza
de corte en cada superficie est á dada por
V A = F A
2 =
21, 36 [kN ]
2 = 10, 68 [kN ]
En la figura 1.29 se observa que el pasador B
se encuentra sometido a cortante simple , esto
ocurre en la sección entre
el cable y la viga (figura 1.30c). Para este caso se tiene
que la fuerza cortante es
V B = F B = 12, 5 [kN ]
Una vez conocidas las fuerzas que actúan sobre los pasadores,
es posible utilizar la formula de esfuerzo cortante
(ecuación (1.3)).
τ A = V AAA
= 10, 68(103) [N ]π4
(0, 02 [m])2 = 30, 0 [MP a]
τ B = V BAB
= 12, 5(103) [N ]π4
(0, 03 [m])2 = 17, 7 [MP a]
III.- El eje mostrado en la figura 1.31a, está
soportado por dos rodamientos y se encuentra sometido a tres
torques.
Determine el esfuerzo cortante desarrollado en los puntos
A y B , localizados en la sección a − a
del eje (figura 1.31b).
(a) (b)
Solución El primer paso es determinar el torque interno
en la sección a − a. Para ello se asume que las
reacciones
en los rodamientos son cero, ya que se asume que el peso del eje
es despreciable. Además, los torques aplicados satisfacen
el equilibrio de momentos en torno al eje x.
El torque interno de la sección a − a se determina
mediante el diagrama de cuerpo libre del segmento de la
izquierda
del eje, figura 1.31. Aplicando la ecuación de
equilibrio de momentos se tiene
M x = 0 42, 5 [kp · in]− 30 [kp · in] − T =
0
T = 12, 5 [kip · in]
04/06/2015 Profesor: Roberto Cárdenas P.
Ayudante: Anibal Aguilera B. 2015-AP-07
-
8/15/2019 2015 AP 07Solidos
22/24
Figura 1.31
La inercia polar para un eje solido está dada por la
ecuación (1.22), para este eje se tiene
J = π
2(0, 75)4 = 0, 497 [in4]
Para el esfuerzo cortante en el punto A, se aplica la
formula (1.21) considerando ρ = 0, 75 [in].
τ A = T · ρJ
= (12, 5 [kip · in]) · (0, 75 [in])(0, 497
[in])2
= 18, 9 [ksi]
De forma similar se determina el esfuerzo cortante en el punto
B , considerando ρ = 0, 15 [in] se tiene
τ B = T · ρ
J =
(12, 5 [kip · in]) · (0, 15 [in])
(0, 497 [in])2 = 3, 77 [ksi]
IV.- La barra de acero mostrada en la figura 1.32,
tiene una sección rectangular de 0, 8 × 2, 5 [in]. La barra
esta
sometida a dos pares iguales y opuestos que actúan en el plano
de simetŕıa vertical de la barra. Determine el valor del
momento flexionante que causa la fluencia del material.
Considere σf = 36 [ksi].
Figura 1.32
Solución Debido a que el eje neutro pasa a través del
centroide C de la sección transversal de la
barra, se tiene
c = 1, 25 [in] (figura 1.33). Por otro lado, el
momento de inercia de área para una region rectangular está dado
por
I = 1
12 · b · h3 =
1
12(0, 8 [in]) · (2, 5 [in])3 = 1, 042 [in4]
04/06/2015 Profesor: Roberto Cárdenas P.
Ayudante: Anibal Aguilera B. 2015-AP-07
-
8/15/2019 2015 AP 07Solidos
23/24
Figura 1.33
Utilizando la expresión de flexión (ecuación (1.37)), y
sustituyendo con la información conocida es posible obtener el
momento flexionante que genera la fluencia del material.
M = I
c · σm =
1, 042 [in4]
1, 25 [in] · (36 [ksi])
M = 30 [kip · in]
V.- El eje solido y el tubo mostrados en las figuras
1.34a y 1.34b, respectivamente, se
encuentran sometidos a una
fuerza cortante de 4 [kN ]. Determine el esfuerzo cortante
que actúa sobre el diámetro de cada sección.
(a) (b)
Solución Utilizando la tabla ??, es posible
determinar el momento de inercia para el solido y el tubo.
I solido = 1
4πr4 =
1
4π(0, 05 [m])4 = 4, 909(10−6) [m4]
I tubo = 1
4π(r4e − r
4i ) =
1
4π[(0, 05 [m])4 − (0, 02 [m])4] = 4.783(10−6) [m4]
Figura 1.34
04/06/2015 Profesor: Roberto Cárdenas P.
Ayudante: Anibal Aguilera B. 2015-AP-07
-
8/15/2019 2015 AP 07Solidos
24/24
El área semicircular sombreada mostrada en la
figura 1.34 sobre cada diámetro, representa Q,
debido a que está área
es afectada por el esfuerzo cortante longitudinal a trav́es del
diámetro. Determinando el valor Q para cada caso se
tiene
Qsolido = ȳA =
4r
3π
πr2
2
=
4(0, 05 [m])
3π
π(0, 05)2
2
= 83, 33(10−6) [m3]
Qtubo =
ȳA = 4re
3π
πr2e
2
−
4ri3π
πr2i
2
= 4(0, 05 [m])3π
π(0, 05)2
2
−
4(0, 02 [m])3π
π(0, 02)2
2
= 78, 0(10−6) [m3]
Aplicando la formula de cortante (ecuación (1.41)) y
considerando t = 0, 1 [m] para la sección solida,
y t = 2(0, 03) [m] =
0, 06 [m] para el tubo, se tiene
τ solido = V Q
It =
4(103 [N ])(83, 33(10−6 [m3])
(4, 909(10−6) [m4])(0, 06 [m]) = 679 [kP a]
τ tubo = V Q
It =
4(103 [N ])(78, 0(10−6 [m3])
(4, 783(10−6) [m4])(0, 06 [m]) = 1, 09 [M P a]
Bibliograf́ıa
Beer, F., Johnston, R., Eisenberg, E., Mazurek, D., Cornwell,
P., y cols. (2004). Mec´ anica de
materiales (3.a ed.). Mexico:
Mc Graw Hill.
Beer, F., Johnston, R., Eisenberg, E., Mazurek, D., Cornwell,
P., y cols. (2010). Vector mechanics for engineers,
statics
and dynamics (Ninth ed.). New York: Mc Graw Hill.
Hibbeler, R. (2006). Mec´ anica de
materiales (Sexta ed.). México: Pearson
Educación.
Popov, E. P. (2000). Mec´ anica de
s´ olidos (2, Ed.). Pearson Educación.