Embed Size (px)
Citation preview

55
2.3 クーロン摩擦による自励振動
産業界の摩擦振動のトラブルの内で,一番多く問題を引き起こしている摩擦はクーロン摩
擦である(図 2.1 参照).以下にクーロン摩擦に起因する摩擦振動の特徴をまとめる(1).
(1) 常にではないが,自励振動の発生・不発生は摩擦力の向きに対して方向性(Directional character)を持つ.摩擦力の向きを逆にすると自励振動が生じ始めたり,逆に生じていた
ものが生じなくなったりすることがある. (2) 振動方向と摩擦力の方向が垂直に近い.したがって,摩擦力の変動を生じている. (3) 2 自由度系以上の多自由度振動系に起こり,1 自由度系では決して起こらない.したが
って,クーロン摩擦による振動を解析するときの解析モデルの 小自由度は 2 である. (4) 摩擦力に起因する摩擦モーメントが自励振動を引き起こす原因である.そのモーメント
が,摩擦を受ける物体,たとえば,回転体の摩擦面に直角な面外振動を誘発する. (5) 摩擦係数μ が大きいほど,この摩擦自励振動は生じやすい. (6) 数学的には,剛性行列の強い非対称性(Strong asymmetry of stiffness matrix)によって生じ
る不安定振動として解析される.摩擦係数が大きくなると,その非対称性はより顕著に
なる.一方,摩擦係数をμ 0= と置くと,一般に剛性行列は対称となる. (7) 一般に,摩擦係数が大きい摩擦ほど,いわゆる負の勾配も大きいと言われる.クーロン
摩擦と乾性摩擦ははっきりと分離して存在できるわけではなく,共存する.したがって,
クーロン摩擦と乾性摩擦の双方の原因が連成して生じる複雑な摩擦振動も発生すること
がある(2.2.7 参照). (8) クーロン摩擦による自励振動を制振するためには,剛性行列の非対称性を緩和する方策
が必須である.そのために,クーロン摩擦による自励振動を動吸振器で制振しようとす
るとき,動吸振器の減衰に大きな値は必要としない.
上述の特徴を持つクーロン摩擦に起因する摩擦振動の例を以下に見ていこう. 2.3.1 ふすまの開閉
ふすまや障子を開閉しようとしたときや,学校の掃除のときに机を引きずって移動させよ
うとしたとき,ふすまや障子,机がガタガタと振動したり,引っかかって止まってしまった
経験はないだろうか.これは一体どうして起こるのだろうか.ふすまや障子の引き手はそれ
らの高さの中央位置には設置されておらず,それよりも少し下に取り付けられていることに
気付いただろうか.それはなぜだろう. 図 2.65 に左側に動かそうとしているふすまの振動のモデルを示す.ふすまを 2 2h b× の矩形
剛体とし,重心 G を原点にとり,下方に x,右方に y,重心回りの回転角θ (反時計方向を正
とする)の各座標をとる.重心 G から高さ l の位置を力 P で押してふすまを動かすとき,ふ
すまは左下先端で敷居と接触するとする.この接触部の剛性をばね k でモデル化する.ばね
からの垂直抗力を F,摩擦係数を μ ,ふすまの質量を M,ふすまの重心回りの慣性モーメン
トを J とする.このモデルの面内の運動方程式は次式で表せる.
Mx F MgMy F P
J bF hF Pl
μ
θ μ
⎫= − +⎪= − ⎬⎪= − + + ⎭
··································································································(2.22)
ここに, ( )F k x bθ= + . ふすまは定速で移動すると仮定する( y = 一定)と,式(2.22)の第 2 式から, ( )P k x bμ θ= +
となる. x bϕ θ= + と置くと,第 1, 3 式から,ϕ に関する次式を得る.

56
図 2.65 ふすまの解析モデル
2[ ( )]k J b M bM h l gMJ
ϕ μ ϕ+ + − + = ···········································································(2.23)
ふすまが不安定となるためには,ϕ の係数が負: 2 ( ) 0J b M bM h lμ+ − + < ,すなわち,
( ) Jh l bbM
μ + > + ·······································································································(2.24)
のときである.運動方程式(2.23)は 2 自由度系ではなく 1自由度系を構成している.このとき,
ふすまは指数関数的に移動して上部右後端で鴨居とぶつかる.ふすまが図 2.65 に示す一つの
接触点を維持しながら大きく振動するのではない.上部右後端で鴨居とぶつかった後は,ふ
すまは接触・離脱を繰り返して振動するか,それとも鴨居に引っかかって動かなくなってしま
うかのどちらかであろうから,図 2.65 とは別の振動系となる. 式(2.24)の右辺を一定値と仮定する.ふすまがスムーズに移動できない状態が起こるのは,
摩擦係数 μ が大,ふすまの高さ(摩擦力の腕の長さ)h が大,l が正で大のときである.力 Pの作用点が重心よりも高い( 0 l h< < )と不安定になりやすく,重心よりも低い( 0h l− < < )と左
辺の値は小さくなるので,安定化していく.すなわち,ふすまを押す位置は低い方が安定,
すなわち,ふすまはスムーズに動くのである. 両手に何かを持っていたとき,ふすまを足で開けた経験はないだろうか.そのときはスム
ーズにふすまは開いたはずである.料亭の女将がふすまを開閉するときは,座ってふすまの
低い位置を持って開閉している.ふすまや障子および机は下の方を押したり引いたりすれば,
スムーズに移動できるようである.昔,忍者が部屋に忍び込むときは,敷居に水をたらし(摩
擦係数を下げ),引き戸の も低いところを持ってそっと開けたに違いない. この問題を静的に取り扱ってみよう.図 2.65 の姿勢で,上右端を鴨居の方に動かそうとす
るモーメントを見よう.力 P による Pl と摩擦力 Fμ による Fhμ が反時計方向に,垂直抗力 Fによる Fb が時計方向に作用する.静的には,P Fμ= だから, ( ) 0Pl Fh Fb F l h bμ μ μ+ − = + − > ,
ゆえに, ( )h l bμ + > のとき,ふすまは反時計方向に回転し,鴨居に当たってカタカタという
振動が誘発されるであろうと考える.この問題では,式(2.24)から動的と静的との差は慣性項
を考慮するかしないかで幾分異なる結果となる. 2.3.2 黒板上のチョークの振動とそのメカニズム
G
P
l
2b
Fμ
F
2h
x
yθ
k

57
机や引き戸を引きずるとガタガタ…と振動することがあることを知った.黒板の上でチョ
ーク(Chalk)を指でつかんで走らせると,カタカタカタ…とチョークが振動することがあるこ
とを経験した人も多いと思う.黒板にはチョークが黒板にのめり込んだ跡が点線模様で点々
と付いている.この黒板上のチョークの振動現象はどのようなときに起こるのかを考える(1).
小学生の頃,カタカタとチョークを振動させることができる人は優越感をもった経験がある
と思う.この現象を利用して黒板に点線で直線や円などを上手に書く先生もいた.図 2.66 に
示すように,チョークと黒板およびマジックペンとホワイトボードの組み合わせで自励振動
の発生を,次の 2 つの条件に注目して観察しよう.
(i) 摩擦係数 μ の大小の影響があるか.チョークと黒板およびマジックペンとホワイトボー
ドの組み合わせで実験する.前者が後者に比べて摩擦係数が大きいと考えられる.
(ii) 図 2.67(b)のチョークと垂直軸との角度φ をチョークの掃引角度と呼ぶ.φ はチョークの
振動と関係があるか,掃引角度φ を変化させて振動を生じる角度を特定する.
観察結果を簡単にまとめると以下のようになる.
(1) チョークが大きな振動を発生しているときは,チョークと黒板の間の接触部は接触・離 脱を繰り返しており,チョークは黒板上で垂直方向と回転方向の振動を行っている.
(2) 掃引角度φ がφ <0 のときにはチョークは決して振動しない.φ >0 のときでもφ が小さな
図 2.66 黒板上のチョークとホワイトボード上のマジックペン (Video2-9)
黒板
チョーク
手
(a) 黒板上のチョーク (b) 解析モデル
図 2.67 チョークの振動
黒 板
チョーク
Fμ
θ
φ

58
値のときには振動するが,大きな値になると振動しなくなる.
(3) ホワイトボードとマジックペンの場合,チョークのような黒板の面に直角方向の面外振
動は発生しない.したがって,チョークの振動は摩擦係数が大きいときに生じやすい.
しかし,マジックペンをホワイトボードにかなり強く押し付けて擦ると,キーという甲
高い音を発する.これはタイヤがスリップしたときのタイヤトレッドのキー音と同じ,
乾性摩擦によるマジックペンの先の自励振動である. この観察から,チョークの振動に対する解析モデルを構築しよう.物体の振動方向と摩擦
力の方向が一致している場合には,摩擦特性の負の勾配を原因とするか,部分的に負の勾配
を考えざるを得ない場合が多い.一方,摩擦力の方向と物体の振動方向が直角に近い場合に
は,クーロン摩擦による自励振動をまず疑う必要がある.クーロン摩擦で自励振動の発生が
困難である場合,すなわち,解析的に摩擦係数が異常に大きな値でしか発生しないときには,
摩擦力に垂直な方向のみならず,摩擦力の方向の振動成分があり,負の勾配が関与している
と考えるのが妥当である.
このように考えると,チョークの振動は摩擦力の方向とほぼ直角で黒板の面外方向である
ので,クーロン摩擦が原因と推測できる.図 2.67(a)に示すように,この系で存在するものは
チョークと手と黒板である.当然のことながらチョークを黒板に接触させずに移動させても
振動は起こらない.だから黒板とチョークの間に作用する摩擦が振動の原因らしい.手に力
を入れて支持するとチョークはしっかりと固定される.だから指はチョークを支持している
ばね(剛性)として作用しているらしい.振動しているのは黒板上のチョークである.した
がって,解析モデルとして図 2.67(b)を採用しよう.簡単のため,チョークの重心をせん断ば
ね kと回転ばねKでモデル化された手によって支持し,チョークと黒板の接触点をばね定数 ikの集中接触ばねでモデル化する.接触点には垂直抗力に比例したクーロン摩擦が作用するも
のとする.チョークの重心の下向き変位および時計方向回転角をそれぞれ yおよびθ とする.
系のクーロン摩擦以外の減衰は簡単のため無視すると,剛体であるチョークの黒板の面外方
向 2 自由度系の運動方程式は,次式となる.
( )
my ky FJ K a l Fθ θ μ
+ = −⎧⎨
+ = −⎩ ··································································································(2.25)
ここに, ( )iF k y aθ= − ,m はチョークの質量,J はチョークの重心回りの慣性モーメント,aおよび 0l > はそれぞれチョークの重心の位置からチョークと黒板の接触点までの水平方向お
よび垂直方向距離,F は垂直抗力の変動成分, μ は摩擦係数である. 接触を伴う振動のモデル化においては,接触部を接触ばねで取り扱うことが極めて有効で
ある.ここでも,接触部にばね ik を仮定した.式(2.25)に ( )iF k y aθ= − を代入し,運動方程式
をマトリックス形式に表示すると,次式を得る. + =Mx Kx 0 ···············································································································(2.26)
ここに,0
, ,( ) ( )0
i i
i i
k k aky ma l k k a a l KJ μ μθ
+ −⎡ ⎤⎡ ⎤ ⎡ ⎤= = = ⎢ ⎥⎢ ⎥ ⎢ ⎥ − − − +⎣ ⎦ ⎣ ⎦ ⎣ ⎦
x M K .
式(2.26)の特徴は剛性行列 K が非対称であることである.摩擦が存在しないとき( 0μ = )に
は,剛性行列は対称である.質量行列,剛性行列がともに対称な系は安定系である.一方,
摩擦係数 μ や長さ l が大きくなると,非対角項がお互いに異符号[ 2( ) 0ia a l kμ− < ]となり,剛
性行列が大きな非対称性を持つようになる.式(2.26)は定数を係数とする線形微分方程式であ
るので,基本解を teλ=x A 1 2( , )t ty A e A eλ λθ= = と置くと,次式を得る.

59
2
12
2
00( ) ( )
i i
i i
Ak k m akAa l k k a a l K J
λμ μ λ
⎡ ⎤+ + − ⎡ ⎤ ⎡ ⎤=⎢ ⎥ ⎢ ⎥ ⎢ ⎥− − − + + ⎣ ⎦⎣ ⎦⎣ ⎦
上式が非自明解を持つための必要十分条件は,
2
2det 0( ) ( )
i i
i i
k k m aka l k k a a l K J
λμ μ λ
⎡ ⎤+ + −=⎢ ⎥− − − + +⎣ ⎦
······························································(2.27)
上式はλ に対する 4 次の特性方程式である.上式を展開し,4 個の特性根λ を求めると,
21 42 tr diff skλ Ω Ω Ω= ± − ± + ····················································································(2.28)
ここに,{ }
2 2 2 211 22 11 22
2 211 22
, ( / )( ) / ,
( ) / , ( ) /tr sk i i diff
i i
ak m a l k J
k k m K k a a l J
Ω ω ω Ω μ Ω ω ω
ω ω μ
⎧ = + = − = −⎪⎨
= + = + −⎪⎩
および式(2.28)の前後の複号は,(+, +),(+, -),(-, +),(-, -) の組み合わせとなる. 式(2.28)の二重根号の中が負になるとき,すなわち, 2 4 0diff skΩ Ω+ < ···········································································(2.29)
のとき,特性根は以下のような 4 個の複素根となる.
r i jλ λ λ= ± ± ······································································································(2.30)
ここに, 1j = − ,および
2 2 2 21 14 0, 4 02 2r tr tr diff sk i tr tr diff skλ Ω Ω Ω Ω λ Ω Ω Ω Ω= − + − − > = + − − > ···········(2.31)
したがって,式(2.29)が成り立てば,実部が正の複素固有値が存在する(式(2.29)の式が不等 式ではなく等式のとき, 0rλ = )ので,必ず不安定振動が発生することになる.そのときの
虚部 iλ は発生するだろう不安定振動の角振動数である.したがって,式(2.29)が不安定振動発
生のための必要十分条件である.式(2.29)が成り立つとき,チョークは振動しながら振幅が大
きくなるフラッタ型不安定振動を発生する.その結果,黒板とチョークの接触が保持できな
くなり,観察された黒板上でカタカタという振動,いわゆる,チョークの自励振動へと変化
していくと考える.
ここでは,特性方程式の根を直接求めて系の安定性を検討したが,一般的には特性方程式
が高次の代数方程式となるので,その根は数値的に求めざるを得ない.そのときは,式(2.26)を第 1 章の式(1.22a, b)の標準固有値問題または一般固有値問題に変形して数値計算する.求
められた特性根のうち実部が一つでも正のものがあれば,系は不安定となる.この例では,
クーロン摩擦以外の減衰を考慮していないので,特性根には実部が零のものが存在する(漸
近安定ではない)ことを注意しなければならない. 式(2.29)の条件をもう少し大まかに見てみよう. 2 0diffΩ ≥ であるから,式(2.29)が成り立つた
めには,必ず 0skΩ < でなければならない.すなわち,チョークの並進運動と回転運動の非連
成固有振動数 2 211 22,ω ω が近づき(または一致し, 2 0diffΩ ≈ ),しかも, 0skΩ < ,すなわち,
( ) 0a a lμ− < となると不安定振動が発生し得ることがわかる.よって,このタイプの不安定振
動が発生するための必要条件は,次式が成立することである( 0l >ただし, とする).
0a > および al
μ > ·····························································································(2.32)
式(2.26)の運動方程式から,2 自由度系に不安定振動が発生するための必要条件は,剛性マ
トリックスの非対角要素がお互いに異符号であることである.このように,剛性マトリック
スが非対称となるだけでは系は不安定となるとは限らない.この条件は,2 自由度系で,減

60
0 tanl
a=
図 2.68 チョークの不安定領域
衰を無視した場合の不安定振動が発生するための必要条件として一般的に成り立つ便利な条
件である.2 自由度系で不安定振動を生じさせないためには,剛性マトリックスの非対角要
素がお互いに異符号とならないように設計すべきである.
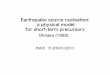
横軸を掃引角度 tanφ ,縦軸を摩擦係数 μ にとり,チョークの不安定振動の発生領域を示す
と,図 2.68 のようになる. 2 直線( 0, /a a lμ= = )に囲まれた式(2.32)の領域が不安定振動
発生の必要条件である.また,式(2.29)の必要十分条件を適当なパラメータで計算すると,安
定・不安定境界が曲線で表された灰色の領域となる.この結果は以下のように説明できる.
(1) tan ( / ) tana lμ ρ φ= > = ( ρ φ> )のとき,すなわち,摩擦係数がある値よりも大きいと
きに摩擦振動は生じる.ここに, ρ は摩擦角である. (2) 図 2.68 の①に示すように,不安定領域が生じ始める 小の摩擦係数がある.
(3) チョークと黒板の接触点が,チョークの重心の位置よりも移動方向にずれているとき,
すなわち,φ >0 のときにのみ摩擦振動は発生する. (4) φ >0 でもチョークが大きく傾くと摩擦振動は起こらなくなる.たとえば,図で②の線
に沿ってチョークの掃引角度を変化させたとする(Video2-10).すなわち,進行方向に対
して逆に大きく傾けた状態から徐々に立てて行き,さらに進行方向に傾けたとき, 初,
振動は起こらないが,ほぼ /a lμ = の線を通る角度から振動が発生し始め,ほぼ 0a = の線
を通るまで持続する.掃引角度が負になった後は,振動は生じない. このメカニズムを静的に考察してみよう.まず,φ <0 のときにチョークの振動が起こらな
いことから考えよう. 0φ < ( 0a < )のときには,チョークと黒板との間の垂直抗力 F と摩擦
力 Fμ はともにチョークを反時計方向に回転させるモーメントを生じる.その結果,チョーク
が黒板から離れる向きのモーメントだけが存在する.そのため,φ <0 では,チョークの振動
は発生しない.
一方, 0φ > ( 0a > )のときは,垂直抗力 F はチョークを時計方向に回転させる方向に,摩擦
力 Fμ は反時計方向に回転させる方向へと作用する.これら 2 つのモーメントの大きさは力の
みならず腕の長さにも関係する.垂直抗力 F と摩擦力 Fμ は,一般に垂直抗力の方が大きい
( 0 1μ< < ). 0φ > でφ が大きいとき, a l> だから, Fa Flμ> となってしまい,チョークが黒
板から離れる向きのモーメントだけが存在するので, 振動は生じない.さらに, 0φ > でφ が
小さいとき,すなわち, Fa Flμ< ( a l< )となれば,摩擦力によってチョークが黒板に入り
込むモーメントが発生し,垂直抗力の変動と重心の上向き変位が生じる.そのため,自励振
動の発生が期待されよう.実際は,この力やモーメントだけではなく,慣性力や慣性偶力と
いう慣性項,すなわち,動的な影響も加わって振動が発生する.これが黒板上のチョークの
振動の簡単なメカニズムである.実験とは非常によい対応関係が確認された.このように,
μ
不安定領域
②
①
tan /a lφ =
⇐
⇐
⇐

61
クーロン摩擦に起因するチョークの振動は方向性を有していることがわかるであろう.
このメカニズムと同様な現象に,電磁クラッチの鳴き,ヘッド/ディスク装置の飛び跳ね,
自動車用ディスクブレーキの鳴きなどがあり,クーロン摩擦による摩擦振動の多くの共通点
が見られる.
(a) 博多山笠の御輿 (b) 御輿の振動メカニズム
図 2.69 御輿の振動
Tea Time 2.5 御輿(みこし)にもチョークと同様な振動が!
図 2.69(a)に見る博多山笠の起源は 1241 年であり,775 年を超える伝統がある.山笠の御輿
は 1~2 トンの重さのため,完全に浮かして運んでいるのではない.道路上を滑らせながら移
動している.ずっと昔はこの祭りで多くの犠牲者を出したそうである.図 2.69(b)のように,
御輿の上に乗っている人が御輿の大きな上下振動で振り落とされて御輿の下に挟まってしま
った歴史がある.これを防止するために,今では次のような暗黙の掟が存在するという. (1) 御輿の前の担ぎ手は後ろの担ぎ手よりも 4cm 程度身長が高いこと. (2) 前の担ぎ手は腹を出し,担ぎ棒を肩で担ぐ.後ろの担ぎ手は前かがみになり担ぎ棒を背
中で担ぐ.後ろの担ぎ手が御輿を押し,推進力を発生させる. 図 2.69(b)に御輿の担がれた状態を示す.もしも,御輿の前側(○)で道路と接触すると,
御輿の重心とその接触点を結ぶ線をチョークと考えれば,掃引角度があまり大きくない正の
姿勢となり,御輿の飛び跳ねが生じる.一方,後ろ側(●)で道路と接触しながら移動する
と,チョークで考えれば,掃引角度が負の姿勢となり,飛び跳ねは生じない.したがって,
かならず,後者,すなわち,御輿の後ろ側で接地させながら移動させることが安全面でも必
要である.祭りの中にも生を賭けた掟が存在する.この掟を守っておれば,御輿の飛び跳ね
図 2.70 新幹線のパンタグラフの例
山 笠
◎G
←

62
は防げ,楽しい祭りを盛り上げる.
Tea Time 2.6 パンタグラフ
パンタグラフ(Pantograph)は架線から常時電力を供給する必要があるため,走行中,パンタ
グラフが架線から脱離することを防止せねばならない.新幹線のパンダグラフの中に,図 2.70のような形式のパンタグラフが全車両で一対,お互いに逆または同方向に取り付けられてい
るものがある.上り下りの両走行時のときもパンタグラフと架線の接触が保たれ,離線しな
いように傾けている.前節で述べたチョークの振動で言うと,パンタグラフは架線との間の
掃引角度が負の値か正で大きな値となるように(図 2.68 参照)設定されているのである.
(a) おもちゃ「ドラミングキツツキ」(Video2-11)
(b) 解析モデル (c) 指のスライダ支持
図 2.71 キツツキの解析モデル(下降時)
2.3.3 おもちゃ「ドラミングキツツキ」
昔からある懐かしいおもちゃには,摩擦を利用したものが多く見受けられる.図 2.71 に示
すドラミングキツツキ(Drumming woodpecker)も駆動力として一定の重力を利用し,キツツキ
のトリッキーな振動を再生するために摩擦を利用したおもちゃである.このおもちゃの振動
のメカニズムを考える(28)(29)(30).前節で述べた黒板上のチョークの振動との相異を見出そう. キツツキの挙動を観察してみると,以下の特徴がある.
(1) 一定の重力の作用を受けて,キツツキは振動しながら垂直に下降する. (2) 垂直棒と接触しているスライダもキツツキと同様に間欠的な運動をしながら垂直に下
降する.垂直棒とスライダが離れるあたりでキツツキは下降する. (3) キツツキとスライダはほぼ一定の平均速度で下降している.
y
●
●
Q
Q Qμ
Qμ F
スライダ
は り
キツツキ
Mg
F F
F
x
Fl
EI, l ●
b ●
垂
直
棒
指
スライダ
●
垂
直
棒
● ●
2h
キツツキ 垂直棒
スライダ
mg

63
(4) 垂直棒とスライダ間のすきまが小さいため,スライダの回転運動はキツツキの垂直方向
の変位よりもかなり小さい. 観察から解析モデルを構築しよう.図 2.71 に示すように,ドラミングキツツキを 3 つの要
素からなる系と考える.すなわち,キツツキ,垂直棒を囲むスライダおよびキツツキとスラ
イダを結合するばね要素である.このばね要素の長さを l ,曲げ剛性 EI の片持ちはりとし,
垂直棒長さ方向のスライダの長さを 2h,垂直棒からスライダに作用する垂直抗力を Q,摩擦
係数を μ ,片持ちはりに作用するせん断力を F,重力加速度を g,キツツキを質量M の剛体,
キツツキの垂直方向下向きの変位を x,スライダの質量をm ,スライダの変位も垂直方向下
向きに y とする.キツツキの重心まわりの回転運動およびスライダの重心まわりの回転運動
を簡単のため無視する.キツツキとスライダの垂直方向の運動方程式は,次式となる.
, 2Mx Mg F my mg F Qμ= − = + − ······························(2.33) スライダの回転運動を無視し,片持ちはりの長さ l がスライダの半径方向幅に比べて十分に
長いとすると,モーメントのつり合いから,
2 0Fl hQ− = ·····································(2.34) はりの相対変位を z x y= − と置くと,
( )F k x y kz= − = ··············(2.35)
ここに, 33 /k EI l= は片持ちはりのばね定数である.これらの関係をまとめると,次式を得る. 1 1 0lz kzm M mh
μ⎛ ⎞+ + − =⎜ ⎟⎝ ⎠
······························(2.36)
キツツキがトリッキーな動きをするための条件は,z の係数が負から,
1l mh M
μ> + ·······································(2.37a)
この条件は,はりの相対変位 z x y= − がダイバージェンス型の不安定,すなわち,時間と
ともに発散する場合の条件であるが,実際は相対変位がある程度大きくなると,スライダと
垂直棒の接触点が消滅したり,移り変わるため,結局,キツツキの振動のうち,図 2.71 に示
すスライダと垂直棒との接触点を持つとき(1 周期のうちの一部)のみの運動の不安定性を
示している.一方,この条件はキツツキが静的平衡位置を持つことに対応している.すなわ
ち,キツツキが図 2.71 のスライダと垂直棒の接触点を持ち,垂直棒の任意の位置で静止する
ことができればキツツキのトリッキーな運動が可能であることを意味する. 運動方程式から,もしも,μ μ→ − と置くと,不安定性は生じないことがわかる.すなわち,
もしも,垂直棒とスライダの接触点位置は変化せずに,ドラミングキツツキが何らかの駆動
方法で上昇させられたとすれば,キツツキのトリッキーな運動は再現されなくなるのである.
このようにクーロン摩擦に起因した摩擦振動は方向性がある. キツツキがおもちゃとして機能するためには,式(2.37a)が成り立たなければならない.そ
のためには,摩擦係数 μ が大きいこと,スライダの長さ 2 hが短いこと,ばねの長さ l が長い
ことが必要である.摩擦係数,ばねの長さ,キツツキとスライダの質量 ,M m が一定のとき,
キツツキがトリッキーな動きをするためには,次式のようにスライダ長さがある値よりも短
くなる必要がある.
1 /
lhm Mμ
<+
·······································(2.37b)
次に,図 2.71(c)に示すように,スライダが手に支持された状態で下方に変位する過程を考
える.手とスライダ間の接触ばね定数を K,その接触点と垂直棒の中心からの距離を b とし,

64
運動方程式が同次方程式になるように変数を調整すると, + =Mx Kx 0 ·······································(2.38) ここに,調整された変数変位を改めて x および y と置いて,
xy
⎡ ⎤= ⎢ ⎥
⎣ ⎦x ,
00M
m⎡ ⎤
= ⎢ ⎥⎣ ⎦
M ,1 1 1
k kl l bk k K
h h hμ μ μ
−⎡ ⎤⎢ ⎥= ⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎢ ⎥− − − + +⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎢ ⎥⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎣ ⎦
K ···············(2.39)
この場合には,接触ばね定数 K の存在によって系は 2 自由度系を構成し,フラッタ型の不
安定振動が可能となる.そのときの不安定振動の発生に対する必要条件は,剛性行列の非対
角項が異符号であることから,次式となる.
hl
μ > ·······································(2.40)
もしも, 0K = ならば,剛性行列の非対角項が異符号の条件 2(1 / ) 0l h kμ− < が成り立つとき,
対角項も同時に負となることに注意せねばならない(剛性行列が特異).
図 2.72 テニスコートのブラシの飛び跳ね跡
Tea Time 2.7 テニスコートのブラシ模様
クレイコートでテニスをしたことがある人はきっと経験があると思う.図 2.72 に見るよう
に,練習が終わってコートにブラシをかけるとき,ブラシが飛び跳ねてどうしてもコートを
きれいにできず,コート全体に縞模様が広がってしまったことはないだろうか.ブラシを引
くと,ちょうどブラシがチョークの飛び跳ねと同じ条件になって,ブラシは飛び跳ねる.人
の身長が非常に高い,または柄が非常に短いと飛び跳ねない.一方,ブラシを引く代わりに
押すとブラシは決して飛び跳ねない.ブラシの飛び跳ねには方向性がある.これはクーロン
摩擦の特徴である.柄を 2 つの棒の組み合わせで構成すれば,ブラシの飛び跳ねは防止でき
よう.この現象はチョークの振動と完全に共通性があることがわかるであろう. 2.3.4 しゅう動部をもつ油圧機械の振動
クーロン摩擦による自励振動の発生メカニズムは,剛性行列が強い非対称性を有すること
によって解が安定から不安定へと変化するものであった.
図 2.73(a)に示すような偏心荷重(Mass)を有する縦形の油圧機械において,油圧シリンダ
(Hydraulic cylinder)で偏心荷重を移動させる際に大きな振動が発生した(31).しゅう動部に摩擦
が作用する油圧機械である.その振動の特徴を以下に列挙する.
(1) 振動が発生するのはいつも偏心荷重の下降時である.上昇時には決して発生しない. ⇒ 方向性がある
ブラシ

65
(a) 実機概略図 (b) 解析モデル
図 2.73 しゅう動部を持つ油圧機械(31)
図 2.74 振動波形(31)
(2) 振動はリミットサイクル(自励振動)を画くのではなく,図 2.74 に見るように幾何級
数的に成長する.すなわち,振動は発散振動的である. ⇒ 不安定振動である (3) 振動の方向をみると,偏心荷重,スライダ(Slider)も共にほぼ上下方向の並進運動である
が,スライダとガイド(Guide)との接触点では垂直抗力の変動を生じ,それがまた,摩擦
力の変動を生じる.⇒ 摩擦力の変動がある
(4) スライダとガイドとの接触部の長さが短いと下降時に発散振動を生じやすい. 振動発生に方向性があるという特徴を考えると,振動の原因はしゅう動部に作用する摩擦,
すなわち,クーロン摩擦であろうと推測できる.そこで,スライダの下降時の安定性を図
2.73(b)の数学モデルを用いて解析する(31).この系のモデル化において,摩擦振動を説明する
ための も重要な点は,以下の点である. (1) スライダとガイドとの間には,ほんのわずかなガタが存在するとし,下降時のスライダ
とガイドとの接触点を偏心荷重の重力による負荷を考えて,点 A と点 D とする. (2) それらの点には,垂直抗力( 1 2,Q Q )と摩擦力( 1 2,F F )が作用する.ここに,摩擦力を垂直
抗力と動的摩擦係数 μ との積で表す. (3) 油圧シリンダをばねとダッシュポットからなる支持弾性要素とする. (4) 偏心荷重とスライダの上下方向のみの振動を考えている.しかし,接触点 A および D
では,偏心荷重の振動に伴って垂直抗力(接触力)が変動し,それに伴って摩擦力も変
動する.対象系を 2 自由度系で構成する.
スライダの水平方向の運動は無視しているので, 1 2Q Q= である.偏心荷重とスライダの垂
直方向変位をそれぞれ 1 2,x x とすると,解析モデルに対する運動方程式は次式となる. + + =Mx Cx Kx 0 ⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅ (2.41)
ここに, 1
2
xx
⎡ ⎤= ⎢ ⎥
⎣ ⎦x , 1
2
00m
m⎡ ⎤
= ⎢ ⎥⎣ ⎦
M ,1 1
1 1 21 1
k kl lk k k
h hμ μ
−⎡ ⎤⎢ ⎥= ⎛ ⎞ ⎛ ⎞⎢ ⎥− − − +⎜ ⎟ ⎜ ⎟⎢ ⎥⎝ ⎠ ⎝ ⎠⎣ ⎦
K .
cylinder

66
行列 C は行列 K の k を c に置き換えたものである.上式の特徴は減衰行列C と剛性行列 Kが非対称であること,摩擦係数 μ が大きくなるに従ってさらにそれらの非対称性が大きくな
ること,スライダを支持しているばね 2k とダッシュポット 2c の存在によって行列C , K は特
異ではないことなどがあげられる.2 自由度系においては,本質的(減衰がない場合)には,
剛性行列の非対角要素が異符号であることが不安定の必要条件であるので, 21 1 0lk
hμ⎛ ⎞− <⎜ ⎟
⎝ ⎠ か
つ 対角要素が正: 2 1 1 0lk khμ⎛ ⎞+ − >⎜ ⎟
⎝ ⎠の条件がフラッタ型不安定振動を生じる必要条件である.
後者の条件は成り立っていると仮定すると,不安定のための必要条件は,
hl
μ > ⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅ (2.42)
系の減衰を考慮しなければ,この条件で不安定振動が生じ得る.安定性の必要十分条件は,
特性方程式の根が正の実部をもつかどうかで判定する.しかし,機械の設計においては,安
定であるための必要十分条件で設計するのではなく,少なくとも剛性行列の非対角項が同符
号となるように余裕を持ちたい.すなわち,以下の条件を推奨する.
hl
μ < ⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅ (2.43)
この条件は,以下の対策を行うよう要求している. (1) 摩擦係数 μ を小さくする. (2) スライダとガイドとの接触長さ 2hを長くする. (3) 偏心量 l を小さくする. 一方,上昇時の運動方程式は,式(2.41)において, μ μ→ − に置き換えればよい.そのとき
は,剛性行列と減衰行列の非対角要素は同符号となるため,不安定振動は発生しない. 結局,下降時のみに不安定振動が生じることが理解できる.しかし,下降時でも,図 2.73(b)に示されたようなスライダとガイドとの点AとDで接触を維持できる間は振動が徐々に大き
くなる.さらに大きな振動となると,瞬間的に接触点が消滅し,今度は点 A, D と対角の位置
も接触するような新たな大きな自励振動へと変化していくと推定される.このように,この
油圧機械と前述のキツツキの振動には共通点があることがわかる.
図 2.75 ワイパー系
Tea Time 2.8 ワイパー
ワイパー(Wiper)の振動には 2 種類ある.一つはワイパーの往復運動の中の,ある方向に移
動するときだけドドドッとフロントガラスをたたくような(面外)振動が発生し,逆向きの
移動時にはそのような振動は生じない.雨が小降りのときによく発生する.他の一つはワイ
ワイパーアーム ワイパーブレード
ワイパーラバー ワイパーアーム
ワイパーラバー断面

67
パーの往復運動の両方向移動時ともフロントガラスの表面に沿ってワイパー移動方向の前後
に周期的にふらつきながら移動する振動である.前者はクーロン摩擦,後者は乾性摩擦が原
因の自励振動である. ワイパーは自動車から航空機まで広く使用されている.後者の摩擦振動の発生時に,石鹸
液をフロントガラスに吹き付ければ,ワイパーの振動は突然に消滅する.作用する摩擦が乾
性摩擦ではなくなったのである(2.2 節参照). 前者の摩擦振動の対策の変遷を見てみよう.ワイパーが鉄道の機関車に取り付けられたと
き,摩擦振動が発生し,その対策としてある会社の社長さんがワイパーゴム部を焼いて硬く
し,摩擦係数を下げて当時の国鉄に売り込んだそうだ.その後,ワイパーアームとワイパー
ブレード(図 2.75 参照)の連結部をルーズにすることにより,ワイパーの往復運動の切り替
えに合わせ,ガラスとワイパーゴム部に作用する摩擦を利用して,カチッ,カチッとワイパ
ーブレードとラバーを一体として,その掃引角度を変化させるアイデアが考案された.チョ
ークの振動でいうと,ワイパーの移動方向が切り替えられる毎に,掃引角度を負にして摩擦
振動の発生を防止した.しかし,これも自動車走行時の騒音が低減される中,カチッ,カチ
ッの切り替え音が問題となった.次に登場したのが,現在の形式である.図 2.75 の右端に示
すような,ワイパーラバーの断面形状の一部(○の部分)を細くし,くびれた位置よりもラ
バー先端がワイパーの往復運動に合わせて掃引角度を変える方式である.ワイパーブレード
とアームをきつく固定し,ワイパーラバーだけで掃引角度を変えることで,切替音を出さな
いアイデアである.ラバー断面にくびれ部を設けているので,ラバーが疲労破壊(破断)す
る危険性がある.そのため,車両 1 年点検時にはワイパーのラバー交換が行なわれる.
図 2.76 ブロックの振動モデル
2.3.5 分布摩擦に起因するブロックの振動
チョークやキツツキの系の接触は点接触と見なされ,その接触点のみに集中してクーロン
摩擦が作用した.しかし,産業界には自動車や自転車のディスクブレーキのロータとパッド
など,接触部が 2 次元的な広がりをもって分布するものが多い.その接触部に分布して作用
する摩擦のすべてが自励振動である摩擦振動を起こさせる能力を有しているのだろうか.あ
る部分は摩擦振動を誘発(エネルギー供給効果)させるが,ある部分は逆に,摩擦元来の特
性である振動を抑制する作用(エネルギー消費効果)を有しているのではないかという疑問
が生じる.ここでの目的は接触部のどの領域が摩擦振動を発生するのに も関与しているか
を知ること,およびその結果から摩擦エネルギーが流入する接触部分をカットし,接触しな
いようにすれば摩擦振動は制振できるかを確かめることである.

68
そこで,図 2.76 に示すような一様な剛体ブロックが 2 つのばねで支持され,水平な床の上
をすべりながら一定速度で移動する系を例にとってブロックと床の間の分布摩擦が摩擦振動
へどのように貢献するかを考察する(18).ここでは,ブロックの垂直面内の 2 次元の振動を考
える.ブロックは長さ L,重心 G から接触面までの距離を h,質量を M,重心 G 回りの慣性
モーメントを J とする.また,ブロックは重心 G からリーディング側(Leading side) La および
トレーリング側(Trailing side) Ta の距離の位置でそれぞればね定数 Lk および Tk のばねと減衰
係数 Lc および Tc のダッシュポットで支持されている.ブロックと床の間の接触はばね定数 kおよび減衰係数 c のそれぞれ分布ばねおよび分布ダッシュポットでモデル化する. ブロックの重心 G を原点とし,下向きに x 軸を,進行方向とは逆向きに y 軸をとり(リー
ディング側が 0y < ),ブロックの重心の下向き並進変位を x,反時計方向回転角をθ とする. また,接触部の分布摩擦の摩擦振動への貢献を見るために, y y= の位置を中心に幅 l の領
域をブロックと床の間が接触しないカットされた領域とする( L l> ).したがって,この領域
には摩擦力は生じない.剛体ブロックの運動方程式は,次式で表せる. + + =Mx Cx Kx 0 ·········································································································· (2.44)
ここに,
11 1211 12
21 2221 22
0, , ,
0k kx M c ck kJ c cθ
⎡ ⎤ ⎡ ⎤⎡ ⎤ ⎡ ⎤= = = =⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥
⎣ ⎦⎣ ⎦ ⎣ ⎦⎣ ⎦x M C K ·············································· (2.45)
2 2 3 2 311 22( ), ( / 4 3 / 4) / 3L T L L T Tk k k k L l k a k a k k L y l l khylμ= + + − = + + − − −
12 21, ( )L L T T L L T Tk kyl a k a k k kyl a k a k kh L lμ= + − = + − − − また,減衰行列の要素 ( , 1,2)ijc i j = は ijk における ,L Tk k および k をそれぞれ ,L Tc c および c に置き換えて得られる. 運動方程式(2.44)の特徴は,式(2.45)から剛性(減衰)マトリックス K (C)が非対称である
こと, 0μ = のときは,剛性(減衰)マトリックス K (C)は対称となることである.式(2.44)に,基本解 teλ=x A を代入すると,以下の特性方程式を得る.
2det( ) 0λ λ+ + =M C K ·································································································· (2.46) 上式の固有値問題から系の安定性が求められる.実際には,この固有値問題を標準固有値
問題か一般固有値問題に変形して固有値を計算する.特性方程式の根の中でひとつでも実部
が正のものがあれば,系は不安定となり,摩擦振動が発生する.すべての根の実部が負であ
れば,系は安定となり,摩擦振動は生じない. ここで,安定性の目安を見るために,無減衰の場合を想定する.そのとき,この 2 自由度
系が不安定になるための必要条件は,少なくとも剛性マトリックス K が強い非対称,すなわ
ち,非対角項がお互いに異符号であることである.すなわち, 12 210 ( ) 0L L T T L L T Tk kyl a k a k k kyl a k a k kh L l= + − > = + − − − <μ∩ ················· (2.47) カットなし( 0l = )の基準接触状態を考えると,上式が成り立つためには,
12 210 0L L T T L L T Tk a k a k k a k a k khLμ= − > = − − <∩ ···················································· (2.48) すなわち,基準接触状態の場合,ブロック系が不安定化し摩擦振動へと変化するための要因
は,式(2.48)からリーディング側のばねが硬いか,ばねの位置が重心から離れていること
( L L T Tk a k a> ),摩擦係数 μ が大きいこと,重心から接触面までの距離 h が長いことおよびブ
ロックを支持するばね( kL )が硬いことである.また,基準接触状態で L L T Tk a k a> のため不安
定になったブロック系をカットによって安定化するためには, 21 0k > となるように,
( )kl y hμ+ を大きくする必要がある. まず,図 2.76 のブロック系を自励振動が発生する不安定系に設定した上で,接触部を部分

69
的にカットすることにより摩擦振動の安定化を解析的,実験的に検証しよう.アルミ製のブ
ロックを支えるばねは 2 つの板ばねを,分布接触ばねとしてゴムを使用した.接着剤でゴム
をブロックに貼り付け,ゴムの一部を切り取ることで接触領域を変化させる.板ばねはスラ
イドレール(リニアスライダ)上に取り付けられたフレームに固定される.フレームを手で
押してブロックをスライドさせ,真ちゅう製のスライドプレートとの接触面に摩擦を発生さ
せて振動が発生するかどうかを観測した.実験を数回繰り返す毎にスライドプレートを超音
波洗浄するなど,摩擦特性の定常性を確保した.摩擦特性の保持に神経を注がなければ,実
験の再現性は望めない. 実験装置のブロックの質量,慣性モーメント,支持ばね定数,ブロックと床の間の分布ば
ね定数を表 2.6 に示す.2 つのブロックの支持ばねは重心 G に関して対称( L Ta a= )とするが,
式(2.48)を考慮してリーディング側のばね定数をトレーリング側のばね定数よりも大きく
( L Tk k> )設定した.カットを全くしていない基準接触状態のときのブロック系で発生した摩
擦振動の周波数分析結果を図 2.77 に示す.確かに 487.5Hz の摩擦振動の発生が見られる. 次に,カット位置 y とその領域の広さ(カット幅 l )の安定性への影響を数値計算した結
果が,図 2.78 である.ここでは,カット幅 l (mm)をパラメータとしてカット位置 y (mm)と特
表 2.6 パラメータ値
M 0.518 kg k 2.77×107 N/m2 J 6.61×10-4 kgm2 Lk 7.05×105 N/m L 0.12 m Tk 4.09×105 N/m h 0.015 m c 260 Ns/m2 ,L Ta a 0.045 m ,L Tc c 5.0 Ns/m μ 0.71 - -
Frequency kHz
Spec
trum
dB
-600
-40
1
487.5
-20
0Hz
2 3
図 2.77 カットがない基準接触状態のときのブロックに発生した摩擦振動
-60 -40 -20 0 20 40 60-40
0
40
80
120
~
σ m
ax
y mm
l=0mm
10
64
12
18
16
14
8
1/s
σ st
-60 -40 -20 0 20 40 60-40
0
40
80
120
~
σ m
ax
y mm
1/s
10 14
16
18
20
st σ l=0mm
2
4
6
図 2.78 カット位置およびカット長さと安定性 図 2.79 カット位置およびカット長さと安定性
Hz
y y
0mm stl σ=
0mml =

70
-60 -40 -20 0 20 40 60-40
0
40
80
120
~
σ m
ax
y mm
1/s
σ st
a b c d e f
l=12mm
-60 -40 -20 0 20 40 60-40
0
40
80
120
~
σ m
ax
y mm
1/s
σ st
a b c d e f
l=15mm
0
50
100
Inci
den
ce
%
a b c d e f
l=12mm
Location to be cut
0
50
100
Inci
den
ce
%
a b c d e f
l=15mm
Location to be cut (a) カット幅 12mm の場合 (b) カット幅 15mm の場合
図 2.80 解析結果と実験結果の比較
性根の実部の 大値 maxσ (1/s)との間の関係を描いている.図中の stσ はカットなし( 0l = mm)の基準接触状態のときの特性根の実部の 大値を示す.この基準接触状態では十分な不安定 性( 0stσ > )を示している.太線は不安定(特性根の実部が正),つまり摩擦振動が発生する領
域,細線は系が安定( max 0σ < )であることを示す.結果は以下のようにまとめられる. (1) 分布接触不安定系を安定化するためには、リーディング側先端部分を比較的広い範囲に
カットすることが も効果的である.つまり,リーディング側先端部分の接触摩擦が自
励振動の発生に も貢献している. (2) カット幅を広くすれば,トレーリング側部分のカットでも安定化への効果を得ることが
できるが,リーディング側よりも効果がかなり小さい.中央位置からわずかにトレーリ
ング側に寄った領域の摩擦は相対的に自励振動にあまり貢献していない場所と言える. (3) カット幅が小さいとき,特性根の実部の 大値 maxσ がカットなしの基準接触状態の stσ
よりも大きくなる領域が存在する.ブロックの長さや厚さが大きくなることでこの傾向 は顕著となる.
次に,図 2.76 のブロック系が対称にばね支持( L L T Ta k a k= )され接触部が全くカットされて
いない( 0l = mm)基準接触状態で,式(2.48)が満足されていない安定(自励振動を生じない)
系を考えよう.この状態から接触部の一部をカットして,ブロック系が逆に不安定化する様
子を数値計算で確かめる.表 2.6 と異なるパラメータは, 54.09 10 N/mL Tk k= = × だけとする.
図 2.79 にカット幅 l をパラメータとして,図 2.78 と同様の結果を示す. 0stσ < である系から
トレーリング側をカットすることで系が不安定化し,リーディング側をカットすることは安
定性には影響がないことがわかる.すなわち,トレーリング側の接触摩擦が自励振動を抑え
る効果がある一方で,リーディング側の接触摩擦が分布摩擦系を不安定化する効果があるこ
とを示している. 次に,図 2.78 でカット幅を l = 12mm および l = 15mm としたときの実験を行なった.その
計算結果と実験結果を図 2.80 の上と下の図に示す.計算結果の横軸に描かれている太線の線
l=15mm
l=15mm l=12mm
l=12mm
y y
Location to be cut Location to be cut

71
,L Lk c ,T Tk c
La Ta
,k c
,d dk cdx
dmdy
,M J
L
Movement
hBlock
Leading side Trailing side
Gθ
xSlide plate
Dynamic absorber
yA
C
B
図 2.81 ブロックの動吸振器による摩擦振動の制振
分がゴムをカットした位置とカット幅を示す.カットゾーン a(リーディング側)~f(トレ
ーリング側)のうちの 1 ヶ所をカットして実験を行なった.各カットゾーンについて 10 回ず
つ実験を行ない,摩擦振動の発生頻度を計測した.カットゾーンにおける摩擦振動の発生頻
度と数値計算結果の安定度・不安定度が若干対応していないものの,全体的にはよく似た傾向
を示した.特に,クーロン摩擦によってリーディング側先端の接触部から摩擦振動を発生させる
エネルギーが生み出されていることがわかる.なぜならば,リーディング側先端の接触部をカッ
トすることによって摩擦振動の発生を抑制することが可能だからである.チョークの振動では考
えられなかった発想である.この結果は次の自動車用ディスクブレーキの鳴き現象の発生メカニ
ズムおよび鳴きの抑制対策に大きな指針を与える. 今,複雑な自動車用ディスクブレーキを扱う前に図 2.81 に示すように,図 2.76 の 2 自由度
分布接触ブロックモデルのトレーリング端およびリーディング端に動吸振器を取り付けて,
クーロン摩擦に起因する摩擦振動を抑制するための動吸振器のメカニズムや 適設計法を究
明する(32).ブロックの重心 G を原点として,座標 dy y= に質量 dm ,ばね定数 dk ,減衰係数
dc の動吸振器を取り付ける.ブロックの垂直方向,重心回りおよび動吸振器の運動方程式は, + + =Mx Cx Kx 0 ...................................................................................................... (2.46)
となる.ここに,
d
x
xθ
⎡ ⎤⎢ ⎥= ⎢ ⎥⎢ ⎥⎣ ⎦
x ,
0 00 00 0 d
MJ
m
⎡ ⎤⎢ ⎥= ⎢ ⎥⎢ ⎥⎣ ⎦
M , 11 12 13
21 22 23
31 23 33
k k kk k kk k k
⎡ ⎤⎢ ⎥= ⎢ ⎥⎢ ⎥⎣ ⎦
K .......................... (2.47)
11 L T dk k k k k L= + + + , 13 31 33 dk k k k= = − = − , 12 L L T T d dk a k a k y k= − −
21 L L T T d dk a k a k y k khLμ= − − − , 23 32 d dk k y k= = , 2 2 2 322 12L L T T d dk a k a k y k k L= + + +
および減衰行列C の要素 ijc は上記の k を c に変えたものである. 式(2.46)の連立 2 階常微分方程式を 1 階の常微分方程式に変換し,系の特性方程式を導く.
動吸振器の固有振動数 / / 2d d df k m π= と減衰比 / 2d d d dc m kζ = を変化させ,固有値解析を行
表 2.7 動吸振器を搭載したブロック系のパラメータ値 M 0.555 kg Lk 59.93 10 N/m×
J 4 28.52 10 kgm−× Tk 55.97 10 N/m×
L 0.120 m ζ 0.01 h 0.032 m Lζ 0.01
Ta , La 0.035 m Tζ 0.01 μ 0.9 dy 0.060 m± k 6 29.66 10 N/m× dm M 0.047
,k c

72
-0.06 0.00 0.063
41
Position mTrailing sideLeading side
21
34
2
図 2.82 動吸振器がないときのブロックの不安定振動モード
0.0 0.5 1.0 1.5 2.00.00.10.20.30.40.5
ζ d
fd / fs
0.0 0.5 1.0 1.5 2.0
fd / fs (a) リーディング側 (b) トレーリング側
図 2.83 動吸振器の振動数と減衰比の安定領域への影響
0.0 1.0 2.0
-180
0
180
Phas
e di
ffer
ence
deg
.
fd / fs 0.0 1.0 2.0
fd / fs (a) リーディング側 (b) トレーリング側 図 2.84 動吸振器の先端と根元間の位相差(ζd = 0.01)
い,系の安定性を調べる.計算パラメータを表 2.7 に示す.ここに,式(2.46)の各減衰係数は,
2L L Lc Mkζ= , 2T T Tc Mkζ= , 2c MkL Lζ= から , ,L Tζ ζ ζ を介して求められる.
まず,動吸振器がないときの 2自由度安定性解析を行なう(式(2.47)の点線で囲まれた部分).
表 2.7 から, 0L L T Ta k a k− > となるので,ブロックは図 2.81 の矢印の方向に掃引され, 12 0,k >
21 0k < となるとき,剛性行列の強い非対称性から不安定となり得る.事実,実験では振動数
sf = 336Hz の不安定振動が発生した.図 2.82 に示すように,ブロックは並進と回転が重なっ
たモードであった.図中の数字は周期を 4 分割した時刻でのモード形状を示す. 次に,図 2.81 に示すように,質量比 dm M =4.7%の動吸振器をリーディング端またはトレ
ーリング端に取り付け,動吸振器の固有振動数および減衰比を変化させたときの数値計算結
果を図 2.83 に示す.横軸は動吸振器の固有振動数 df と不安定振動の振動数 sf の比( /d sf f ),
縦軸は動吸振器の減衰比( dζ )である.図中の黒い領域は固有値の実部が正の不安定領域を,
白い領域は安定領域を表す.図 2.83 から動吸振器に減衰がなくても振動抑制効果が見られる.
すなわち,動吸振器には 適減衰は存在しない.また,リーディング端に動吸振器を取り付
けると, d sf f> の領域では全て安定,すなわち,不安定振動は発生しない.一方,トレーリ
ング端に動吸振器を取り付けると, d sf f≈ 付近で抑制効果が見られ,安定領域は閉じている. 図 2.84 は動吸振器の減衰比が 0.01dζ = のときの動吸振器の先端と根元の振動の位相差を数
値計算で求めた結果である.動吸振器を抑制範囲より低めにチューニングすると,動吸振器
の先端と根元は逆相で振動し,高めにチューニングすると同相で振動する. 図 2.83(a)から,動吸振器をリーディング端に取り付け,その固有振動数 df を不安定振動の

73
-0.06 0.00 0.060.0
0.1
Leading side Trailing side
md /
Myd m
-0.06 0.00 0.06Leading side Trailing side
yd m (a) 前進走行 (b) 後退走行
図 2.85 質量がブロックに取り付けられたときの安定(白)・不安定(黒)領域 振動数 sf より高くすると全て安定となった.その理由を確かめるため,ばねを介せず質量付
加のみでも効果があるか確認する.式(2.46)の運動方程式から動吸振器の項を削除し,質量を 付けたことで重心の位置が移動する効果を考える.動吸振器の項を削除した運動方程式(式
(2.47)の点線で囲まれている部分)は以下のように変更される. ′ ′ ′+ + =M x C x K x 0 ···························································································· (2.48)
ここに, dM M m′ = + , 2 2( )d dJ J Me m y e′ = + + − , ( )d d de m y M m= +
11 L Tk k k kL= + + , 12 ( ) ( )L L T Tk a e k a e k kLe= + − − +
21 ( ) ( )L L T Tk a e k a e k kLe khLμ= + − − + − ·················· (2.49) 2 2 3 2
22 ( ) ( ) 12L L T Tk a e k a e k kL kLe khLeμ= + + − + + −
なお,行列 ′M は式(2.47)の点線で囲まれた部分でM をM ′に,J を J ′に,同じく行列 ,′K ′Cはそれぞれ式(2.49)の , ( , 1,2)ij ijk c i j = に置き換えた 2×2 の行列で, ijc は式(2.49)の k を c に置換
したものである. 図 2.85 は質量の付加位置をリーディング端からトレーリング端の間を変化させたときの質
量比による不安定領域の変化を示す.図 2.85(a)はブロックの前進走行時で,質量を取り付け
ていないときも摩擦振動が発生する.図 2.85(b)はブロックの後退走行時で,質量を付加しな
いときでも摩擦振動は発生しない.図 2.85(a)から質量比 4%以上の質量をリーディング端に
付加すると安定となる.一方,トレーリング端に質量を付加するときは,6%以上で安定とな
る.また,質量を付加されたブロックを逆向きに掃引しても不安定になることはない. ここで,質量付加によって系が安定化する理由を考察する.減衰を無視したときの 2 自由
度系の不安定性の必要条件は剛性行列の非対角要素がお互いに異符号となることから,
L L T Ta k a k− ( )L Tk k kL e+ + + 0> ················································································· (2.50)
L L T Ta k a k khLμ− − ( )L Tk k kL e+ + + 0< ········································································· (2.51)
で表される.質量付加により, ( )L Tk k kL+ + の項が新たに加わる. 0L L T Ta k a k− > のとき,質
量をリーディング側に取り付けていくと, 0e < ,つまり ( ) 0L Tk k kL e+ + < から, 12 0k < とな
れば式(2.51)も負となり,必要条件を満たさず系は安定化する.一方,トレーリング側に質量
を付けた場合も,質量比が大きく,式(2.51)の khLμ よりも ( ) 0L Tk k kL e+ + > が大きくなると安
定化する.ブロックの重心をずらすように質量を偏らせると摩擦振動の抑制が可能となる. 次に,図 2.81 の 2 自由度ブロックの実験装置と動吸振器を用いた制振実験を行ない,解析
結果と比較する.2 枚の板ばねを用いてアルミ製のブロック(長さ 120 mm×幅 40 mm×高さ
30 mm)を支持し,ブロックの底面にはゴムを張り合わせ,真ちゅう板に押し付けてスライ
ドさせる.解析と同様に 2 枚の板ばねのうちリーディング側を硬くしており,摩擦振動は進
行方向掃引時のみに発生し,逆向きでは発生しない設定としている.実験パラメータは表 2.6に示されたものと同じである.
このブロックに図 2.86 に示す動吸振器を取り付け,その効果を確認する.動吸振器は長穴

74
Block
DynamicabsorberAccelerometer
Plate spring 図 2.86 動吸振器 図 2.87 実験装置
0 1 2-80
-40
0270Hz
Spec
trum
dB
V
Frequency kHz
-0.06 0.00 0.06-0.5
0.0
0.5
112
2
334
4
Trailing sideLeading side
Dis
plac
emen
t x1
0-3m
Position m
(a) ブロックの周波数分析結果 (b)ブロックの振動モード
図2.88 動吸振器のないときの実験結果
を有する片持ちはりで,そこに取り付けたボルトをスライドさせることで,質量を変えるこ
となく固有振動数を調整する.動吸振器の減衰はブロックと動吸振器の間にゴムを挟むこと によって調節する.動吸振器をリーディング端またはトレーリング端に取り付ける.
図 2.87 に示すとおり,ブロックのリーディング端,トレーリング端,動吸振器の先端に加
速度センサを取り付け,チャージアンプを介して,FFT アナライザで振動を計測する.まず,
動吸振器を取り付けずにブロックをスライドさせ,摩擦振動が発生することを確認する.次
に任意の固有振動数にチューニングした動吸振器を取り付ける.動吸振器の減衰比はブロッ
クに取り付けた状態で動吸振器を打撃し,動吸振器先端の減衰振動波形から求める.動吸振
器の質量は解析と同様にブロックの質量の 4.7%とする.動吸振器の固有振動数および減衰比
を変化させ,振動抑制効果を調べる. 図 2.88(a)は動吸振器を取り付けていないときに発生する摩擦振動の周波数分析結果である.
発生振動数は約 270-280Hz であった.図 2.88(b)はブロックのリーディング端とトレーリング
端の加速度振動波形から求めた振動モードを番号順に 4分の 1周期間隔で表したものである.
ブロックは回転と並進が重なった振動モードをしており,解析で求めたモードとほぼ同じで あることを確認した.
次に,動吸振器を取り付けたときの実験結果を示す.図 2.89 はリーディング端に,図 2.90はトレーリング端に動吸振器付加時の結果である.また,左図は動吸振器の減衰が小さい場
合( 0.01dζ = ~0.03),右図は減衰が大きい場合( 0.07dζ = ~0.1)である.図 2.89(a)および図 2.90(a)は,動吸振器の固有振動数を変化させたときに発生する摩擦振動の振動数 sf ′を○の中心で,
不発生のときは便宜上 /s sf f′ = 1.0 の位置に×で表す.また,不安定振動発生時のブロックトレ
ーリング端の振動振幅の RMS 値を○の大きさで表している.横軸および縦軸の値は動吸振器
を取り付けていないときに発生する摩擦振動の振動数 sf で除している.図中の網掛け部は動
吸振器をチューニングできず実験が行われなかった領域である.図 2.89(b)および図 2.90(b)は,
動吸振器のチューニング固有振動数と動吸振器の先端と根元との位相差の関係を表す.図
2.89 および図 2.90 から以下のことがわかる. (1) リーディング端およびトレーリング端に動吸振器を取り付ける場合,動吸振器の固有振
Block Bolt
Dynamic absorber
Synthetic rubber
21,3 4
4 1 3 2

75
0.6 0.8 1.0 1.2 1.40.5
1.0
1.5 :0.05m/s2
f 's /
f sfd / fs
:100m/s2
0.6 0.8 1.0 1.2 1.4
fd / fs (a) 同調振動数と発生振動数の関係
0.6 0.8 1.0 1.2 1.4
-180
0
180
Phas
e di
ffer
ence
deg
.
fd / fs 0.6 0.8 1.0 1.2 1.4
fd / fs (b) 動吸振器の先端と根元間の位相差
0.01 0.03dζ = ~ 0.07 0.10dζ = ~ 図 2.89 リーディング側に取り付けられた動吸振器による実験結果
0.6 0.8 1.0 1.2 1.40.5
1.0
1.5
f 's /
f s
fd / fs
0.6 0.8 1.0 1.2 1.4
fd / fs (a) 同調振動数と発生振動数の関係
0.6 0.8 1.0 1.2 1.4
-180
0
180
Phas
e di
ffer
ence
deg
.
fd / fs 0.6 0.8 1.0 1.2 1.4
fd / fs (b) 動吸振器の先端と根元間の位相差 0.01 0.03dζ = ~ 0.07 0.10dζ = ~
図 2.90 トレーリング側に取り付けられた動吸振器による実験結果
0.00 0.02 0.04 0.060.5
1.0
1.5
f 's /
f s
md / M 0.00 0.02 0.04 0.06
md / M (a) リーディング端 (b) トレーリング端
図 2.91 質量比と振動の振動数(○:発生,×:不発生)

76
動数 df をそれぞれ摩擦振動の振動数 sf よりも高い振動数領域および振動数 sf 付近にチ ューニングすると効果がある.
(2) 動吸振器の減衰が小さくても,ブロックの両端とも振動抑制効果が十分にある.逆に
減衰を大きくしすぎると振動抑制範囲が狭くなる.強制振動における動吸振器の 適減
衰が質量比 5%程度でおよそ 0.13 と比較すると,クーロン摩擦による自励振動を制振す
るときの減衰比はかなり小さい. (3) 振動抑制範囲よりも振動数を低めにチューニングすると動吸振器は逆相で振動し,高め
にチューニングすると同相で振動する. これらの実験結果は解析結果と良く一致している. 解析では動吸振器をリーディング端に取り付け,十分高めに固有振動数をチューニングす
ると振動が抑制されたので,動吸振器を単なる質量に置き換えたときの効果を実験的に検討
する.図 2.91(a)はリーディング端,図 2.91(b)はトレーリング端に質量を付加したときの結果
である.質量比 6%の範囲では図 2.91(a)から質量比 4%以上の質量をリーディング端に取り付
けると摩擦振動が抑制されることを確認した. 図 2.92(a)および(b)は,図 2.90(a)の減衰が小さいときのそれぞれ非振動抑制時および振動抑
制時の,ブロックおよび動吸振器の振動波形である.図 2.92 から動吸振器によって振動が抑
制されると主系のブロックのみならず,動吸振器自体も振動しないことがわかる.動吸振器
の付加によって自励系全体が安定系になることを確認した.
-1
0
1
-1
0
1
0.00 0.01 0.02-1
0
1 Dynamic absorber
Block(Trailing side)
Time s
Am
plitu
de V
Block (Leading side)
0.00 0.01 0.02
Dynamic absorber
Block(Trailing side)
Time s
Block (Leading side)
(a) fd / fs = 0.74 (b) fd / fs = 0.81
図 2.92 ブロックと動吸振器の振動波形
2.3.6 自動車用ディスクブレーキの鳴き
自動車用ディスクブレーキ(Disk brake)の構造には,浮動型と対向型がある.浮動型はピス
トンがロータに対して片側だけで,押し付け反力によりキャリパをマウントに沿ってスライ
ドさせて反対側のパッドもロータに押し付けて制動する.一方,対向型はロータの両側から
ピストンにより押し付けて制動する.また,キャリパはナックルにしっかりと固定されてい
る.図 2.93 に浮動型を示す.また,ロータの車体の内側面をインナー側,外側面をアウター
側と呼ぶ.自動車用ディスクブレーキの鳴きの特徴を以下に示す.
(1) 交差点近くの低速時で鳴きが生じやすく,高速時では鳴きは生じない.すなわち,高速
道路で高速走行中にブレーキをかけてもブレーキは決して鳴かない. (2) 鳴きが生じる適当なブレーキ力の範囲が存在する.ブレーキ力が強すぎても弱すぎても
鳴きは生じない.たとえば,急ブレーキをかけたときは、ブレーキは鳴かない. (3) 鳴きのロータの振動モードはロータ回転とともに回転するモードではなく,空間にほぼ

77
固定した複素モードである.鳴きの周波数分析から,通常,鳴きは単一の周波数を持つ. (4) ブレーキ系に内部共振関係が存在すると,鳴きも激しく,高調波のスペクトルが見られ
る. (5) パッドとロータの接触において,円周方向接触ではリーディング側(Leading side)接触部
分が,半径方向接触では内周側接触部分が鳴きを発生させる効果が強い.したがって,
その部分に相当したパッドの部分をロータと接触しないようにカットすることで,自励
振動を制振することができる. (6) ブレーキのインナー側とアウター側の鳴きへの寄与を比較すると,質量が偏っているイ
ンナー側のパッドとロータの接触部の影響がアウター側よりもかなり大きい. (7) キャリパは本質的には剛体的ではあるが,鳴き振動モードでは弾性振動も含まれている.
自動車業界では,ブレーキの鳴き音に関しては,高周波鳴き(High frequency squeal)と低周
波鳴き(Low frequency squeal)を区別している.大雑把に言うと,高周波鳴きは 5kHz 以上の周
波数,低周波鳴きはそれ以下の周波数を持つという定義らしい.高周波鳴きはロータとパッ
ドの接触による弾性体同士の連成振動であり,ロータの固有振動数とパッドの固有振動数が
近づくことによって生じる現象である.高周波鳴きのロータとパッドの質量比から言えば,
圧倒的にロータの方が大きい.すなわち,高周波鳴きはほとんどロータの振動に影響される
と考えてよい.鳴きの振動数もそれゆえロータの単独の固有振動数にほぼ一致する.したが
って,鳴きを生じているときのロータの振動モードはロータ単独の振動モードと似ており,
節直径を有するモードとなっている.鳴きを生じるモードは減衰が小さいモードであるので,
ディスクブレーキによって鳴きモードが異なる場合がある.一般に,ロータの鳴きモードの
多くは,節直径が 3~7 本である. 一方,低周波鳴き(Video2-12)はパッドを介したロータとキャリパの連成振動である.ロー
タとキャリパの質量比はおよそ 1 : 0.8 程度となっており,パッドは振動体と言うよりもロー
タとキャリパを接続しているばねの役目をしていると考えた方が適切である.ロータとキャ
リパとの振動勢力の均衡の結果として鳴き振動モードが生じるのであるから,ロータは高周
波鳴きの場合のように節直径を有する振動モードとはならない.ロータもキャリパと妥協せ
Caliper
Trailing side
Rotor
Inner side
Outer side
Leading side
Mount
P
図 2.93 自動車用浮動型ディスクブレーキ 図 2.94 低周波鳴きのモード(-:節線)
Hz2275
0-60
-40
-20
0
Sp
ectr
um
dB
5 10Frequency kHz
図 2.95 低周波鳴きの周波数分析結果
Caliper
Rotor
Acceleration pick-up Inner side
Rotor
Mount
Outer side
Leading side
Trailing side
Caliper
2275Hz
10

78
One revolution
Pad ロータ上の 1 点の加速度
キャリパ上の 1 点の加速度
図 2.96 鳴き振動モード
ねばならなくなり,その結果,節直径ではなく,ロータの本来の振動モードからかなり変形
させられて節半径を有するモードで鳴くようになる.すなわち,ロータは高周波鳴きのよう
に節直径を持つ振動モードではない.たとえば,図 2.94 に示す節半径が 5 本あるロータの振
動モードがそれに相当する.点 P がロータ面外方向の下向きに振動しているとすると,白い
細線で示す節半径の線をよぎる毎に上,下向きにロータの振動方向が変化する.ただし.キ
ャリパ内に入る節半径の線の両側はともに上向きの振動モードである.図 2.95 の低周波鳴き
の周波数分析結果の例のように 2kHz 程度の甲高い鳴き音が良く発生する(18)(19)(32)(33). 図 2.94 のキャリパおよびロータ上(ロータはベンチレーテッドでその内側)に加速度ピッ
クアップを搭載し,鳴きが生じているときの振動波形を計測した.その結果を図 2.96 に示す.
振動波形は時間軸をかなり縮めて包絡状に示している.鳴き発生時には,キャリパは振幅一
定の面外定常振動を,ロータは一周あたり 5 個の節がある弾性振動をしていることがわかる.
さらに,ロータの節は固有モードの節のように振幅が 0 とはならず,振動モードの節が明確
に現れない,いわゆる,複素モードの特徴が現れている. ロータ単体の振動モードを節直径数 m と節円数 s で, ( , )m s モードと表す.鳴きは 0s = の
振動モードの関与が常識である.高周波鳴きでは,たとえば,( , 0)m モードの固有振動数より
わずかに高い振動数をもつ鳴きが多く,低周波鳴きでは,( 1, 0)m − と ( , 0)m モードの固有振動
数間の振動数で ( , 0)m モードに近い振動数を持つ鳴きとなる.低周波鳴きは高級車のディスク
ブレーキに多発した新しいタイプの鳴き現象である(18)(19).したがって,低周波鳴きの対策は
従来の高周波鳴きの対策とはおのずと異なる.高周波鳴きの対策として,オートショップな
どで購入可能なパッドの裏に塗るグリースが有効である.パッドが振動しているからである.
しかし,この対策は低周波鳴きには効果がないことが判明し,新たな対策を必要とした. 前節で取り扱ったブロックの摩擦振動において,作用する接触部には,自励振動を発生さ
せようとする摩擦分布領域と自励振動を発生させる効果があまりない摩擦分布領域が混在し
ていた.自励振動を発生させる能力が高いパッドとロータの領域が接触しないように部分的
にカットすることで,摩擦自励振動を完全に制振できることを自動車用ディスクブレーキの
鳴き対策に利用することを考える.ブロックの摩擦振動では,リーディング側の分布摩擦が
も貢献しているので,その領域をカットすることで自励振動の防止対策となる. 実車では,このカット法に工夫が凝らされたものがある.図 2.97 に示すように,一対のパ
ッドのリーディング側をおよそ 35mm 程度の広い範囲にリーディング側を深く傾斜させてカ
ットしている.そうすると,鳴きは発生しないことになる.また,パッドがブレーキ摩耗に
よって薄くなるにつれてリーディング側への接触が広がり,鳴きが生じるようになると,パ
ッド交換時期を知らせてくれる利点もある.ただし,クーロン摩擦が作用する中,パッドを
カットすることでブレーキ性能は低下しないものの,摩耗が早まることに繋がる.一方, この対策は前進走行に有効であるが,後退走行には効果が少ないので注意が必要である.
One revolution
Pad

79
図 2.97 鳴き防止のためのパッドカット域と形状
図 2.98 キャリパに取り付けられた動吸振器 (Video2-13, Video2-14, Video2-15)
図 2.99 小鹿田焼の飛びカンナ (Video2-16)
動吸振器を用いた自動車用ディスクブレーキの鳴き防止対策も有効である.自励振動して
いる振動体に制振効果があるようにチューニングされている動吸振器を搭載しているとする.
たとえば,鳴きの振動数にセットされた動吸振器をキャリパの端側に取り付ける.そうする
と,動吸振器を含めた新しい系は安定系となるため,ブレーキの制振対象モードの鳴きは生
じない.しかも,動吸振器自体も振動することはないので,疲労の問題もない.ただし,制
振対象モードの鳴き以外の鳴きが生じる可能性がある.原則的には,動吸振器 1 つで 1 つの
鳴きモードの制振が可能となる.図 2.98 に実験で有効性を示した動吸振器を示す.動吸振器
のチューニング法はその固有振動数を鳴きの振動数に一致させるが,減衰はとくに積極的に
調整する必要はない.動吸振器が効果を発揮して全く鳴きを防止しているときに,ドライバ
で動吸振器を押し付けると,そのときだけわずかに鳴きが再現される.動吸振器の質量また
はばね定数が変化したのであろうか.動吸振器の効き目を感覚的に確かめることができる. Tea Time 2.9 クーロン摩擦による自励振動の利用
小石原焼(福岡県朝倉郡),小鹿田(おんた)焼(大分県日田市)のカンナ模様はどのように
トレーリング側 リーディング側
パッド パッドカット
ロータの回転方向 ロータ
パッドカット パッド
キャリパ
動吸振器
ロータ
ドライバ
加速度ピックアップ

80
付けられているのだろう.一つずつカンナ模様を付けていっているのだろうか.小鹿田焼を
見ると,カンナ模様が螺旋状になっていることに気づくであろう.図 2.99 に見るように,こ
の模様はロクロを回しながら,「つ」の字のような平たく薄い金属はりの自励振動を利用して
連続的に付けているのである.すなわち,「つ」の字の道具を右から左へ移動するように,回
転する陶器に押さえながら道具の面外振動で飛びカンナと呼ばれるカンナ模様を付けている
のである.平たい薄い金属はりは柱時計のぜんまいを材料にしていると聞く.原理は,黒板
上のチョークの振動やテニスコートのブラシの振動と同じである.小学校で黒板に振動を利
用して点線を書いていた先生と同じ発想に加えて幅を持たせたものに他ならない. 演習問題
摩擦利用の見地から,両手の指をバットの両端から中心部に近づけるときの挙動を観察せ
よ.その原理を利用して,千円札の薄い幅の上に十円玉を載せるマジックを披露せよ.
図 2.100 車輪とレールの接触平面および記号
図 2.101 楕円半軸長さ a および b
Tea Time 2.10 弾性接触域の大きさとばね定数
鉄道車両とレールの間の弾性接触域はヘルツの理論から導かれる楕円半軸長さ a および bで接触している(34)(35).図 2.100 に見るように,車輪の接触点の曲率半径を R および r で表し,
レールのそれを R および r で表す.車輪・レールはともに一つの曲率を持った平面であると
仮定する.すなわち,
P
Wheel
Rail
R
z(kz)
x
r=∞
○
y
○
R = ∞ r2a
( )yy k
2bϕ
0.8 0.8
0.6
0.4
0.2
0 0
1.01.6
1.0 1.0
( )xx k

81
,r R→ ∞ → ∞ ··············································································································· (2.52) そのとき,垂直荷重 P による楕円半軸長さ a および b は Thomas-Hoersch の方法により,図
2.101 のグラフを用いて簡単に求められる(36)(37).ここに, / ;/ ;
r R r RR r r R
μ≤⎧
= ⎨>⎩
のとき
のとき および
/ ;/ ;
b a r Ra b r R
σ≤⎧
= ⎨>⎩
のとき
のとき ····································· (2.53)
μ が求められると,図 2.101 からσ および係数α が得られる.それらの値を使って,次式
から楕円半軸長さの一つが求められる.ここに,ν はポアソン比,G は横弾性係数である.
32
3 (1 )(1/ 1/ )
PG R r
ν αΓπ σ
−=
+,ここに,
;;
a r Rb r R
Γ≤⎧
= ⎨ >⎩
のとき
のとき ··········································· (2.54)
他のひとつの楕円半軸長さはσ から求められる. 次に車輪とレールが同じ弾性定数ν および G をもつと仮定して接触域での線形ばね剛性を
求める.半径方向剛性係数 zk は Herz(34)と Mindlin(35)の計算結果を用いると次式となる.
* 12 2z zk kG K
ν πΓ
−= = ,ここに,
/ 2 22 20
( ) , 11 sin
dK K k kk
π θ σθ
= = = −−
∫ ·················· (2.55)
図 2.102 無次元ばね定数 *
zk 図 2.103 無次元ばね定数 * *,x yk k
図 2.104 無次元ばね定数 *kϕ 図 2.105 接触領域に働くすべり率とクリープ力
y
x
z
xT
yT
3γ
zM
1γ2γ
*zk
*
*x
y
kk
σ σ
σ
*kϕ
0 0

82
図 2.102 から 0.3ν = のときの楕円半軸長さ比σ に対する無次元ばね定数 *zk が求められる.
水平両軸長さ方向のばね定数 xk および yk は次の無次元形式で与えられる(35)(複号同順).
2
*
*
2
2 2 ,2 2 (2 )
1 2 ,2 2
2 2 ,2 2 (2 )
x x
yy
K N bk
k ka b
kGkK N a
k
ν Γν π π ν
ΓΓ ν
ν Γν π π ν
⎧ ⎡ ⎤=⎪ ⎢ ⎥− −⎣ ⎦⎪
⎫ ⎪⎡ ⎤⎪ ⎪= = = =⎬ ⎨⎢ ⎥ −⎣ ⎦⎪ ⎪⎭⎪ ⎡ ⎤
± =⎪ ⎢ ⎥− −⎣ ⎦⎪⎩
∓ のとき
のとき
のとき
··························· (2.56)
ここに,/ 2 2 2
0
2 2( ) 4 , ( ) 1 sinEN N k k K E E k k dk k
ππ θ θ⎡ ⎤⎛ ⎞= = − − = = −⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦ ∫ .
図 2.103 はσ に対する無次元ばね定数 *xk および *
yk を示す.もしも, aΓ = ならば,2 曲線の
うちの上側が *xk ,下側が *
yk を表す. bΓ = ならば,その逆に読めばよい.
さらに,z 軸回りのねじりばね定数 kϕ(36)は,
2
*3
3 [ 4 (1 ) ]8( )8
k E k CkBD CEG
ϕϕ
π ννΓ
− −= =
− ············································································· (2.57)
ここに, 2 2 2 4 2[ (1 ) ]/ , [(2 ) 2 ]/ , ( ) /B E k K k C k K E k D K E k= − − = − − = − .図 2.104 に kϕ をσ の 関数として示している.
Tea Time 2.11 レールと車輪の弾性接触領域
x 方向をレールの長手方向とすると,新幹線ではおよそ 10mma b≈ ≈ ,長手方向にわずかに
短い楕円形である( a b< ). 在来線の場合は,接触領域も狭く,長手方向に長い楕円形となる.
2.4 クリープ力による自励振動
転がり摩擦の作用する弾性接触領域およびそこに作用する力などについてまとめる.
(1) 転がり接触部はヘルツの弾性接触理論によって一般に楕円となる. (2) 楕円状の接触域にはすべり領域と凝着領域が混在する.接触域のわずかなすべりによっ
て発生するクリープ力(Traction)にはすべり(縦)方向の力,物体の走行方向との傾き角
および横方向の速度に比例した横方向の力および接触領域に垂直な軸まわりのスピンモ
ーメントがある. (3) 転がりすべりが小さいときは,クリープ力はすべり率に比例するが,すべりが大きく なるとクーロン摩擦,さらに乾性摩擦の特性へと変化していく.摩擦特性は極めて微妙
な変化を生じる. (4) 鉄道車両の車輪とレール,自動車タイヤと道路,製鉄圧延ロールとストリップにおける
チャタリングなどへの応用がある. 図 2.100 に示すような弾性体が接触している領域に作用するすべり率とクリープ力の関係
は,カルカーによって体系化された(37)-(48).カルカーの線形クリープ理論を新幹線の車輪とレ
ールを例にとって以下に紹介する. 弾性体の接触領域を xy 面内とし,それに垂直な方向を z とする.ヘルツ理論から,接触領
域が x 方向に長径 2a,y 方向に短径 2b の楕円として求められるとする.x,y,z 方向のすべ
り率をそれぞれ 1 2 3, ,γ γ γ と置き,G を横弾性係数, 3/ 2 2
11 11 22 22 23 23 33 33, , ( ) , ( )f GabC f GabC f G ab C f G ab C= = = = ...................... (2.58)

83
図 2.106 カルカーのクリープ係数(ポアソン比 0.3)
図 2.107 車輪とレール
および Cijをカルカーの無次元係数とすると,カルカーの線形クリープ理論から,x,y 方向の クリープ力 T1,T2,および z 軸回りのスピンモーメント M3は以下のように表される.
1 11 1T f γ= − , 2 22 2 23 3T f fγ γ= − − , 3 23 2 33 3M f fγ γ= − ··················································· (2.59)
接触楕円領域にはすべり領域と凝着領域が分布する.これらは,このすべり領域にクーロン
摩擦が作用するとして,数値計算されたものである. 0.3ν = のときのカルカーのクリープ係
数 ijC を図 2.106 に示す.
2.4.1 鉄道車両の蛇行動
鉄道車両が方向を変えるとき,自動車のようにハンドルで車輪の角度を変えることはしな
い.車輪は回転軸とともに一体構造であり,車輪のタイヤ部は図 2.107 に見るように勾配を
持つことによってレールに沿ってカーブを走行することができる. 今,図 2.108 のひとつの輪軸系の運動方程式を導く(49).以下の仮定を置く.輪軸は一定速
度 v で走行し,軸箱支持装置のばねが取り付けられている枠の質量は十分に大きいとし,輪
車 軸 車輪
レール
タイヤの勾配

84
図 2.108 輪軸の解析モデル
軸と同じ速度で走行する.右および左車輪の前後すべり率 1 1,r lγ γ は,
0 0 0 01 1
2 21 , 1r lr rr l
r l r l
v d r d v d r dr rv r r v v r r vψ ω ψ ψ ω ψγ γ+ − − −
= = − + + = = − + −+ +
············ (2.60)
ここに,走行速度 ( ) / 2r lv r rω= + ,および ,r lr r はそれぞれ右,左側車輪半径,ω は車輪の回転
角速度,ψ はヨー角, 0d はレール間の距離の半分(図 2.108 参照)である.
次に,左右すべり率 2 2,r lγ γ は,
02 2r l
y rv
ψγ γ ψ+= = − ·································································································· (2.61)
ここに, 0 ( ) / 2r lr r r= + ,y は輪軸の左右方向変位である.
接触点法線回りの輪軸回転角速度 wΩ は輪軸の転がり軸回り角速度ω の法線方向成分とヨ
ーイング角速度ψ の法線方向成分からなるので, ( ) , ( )wr r wl rΩ ω α φ ψ Ω ω α φ ψ= + + = − − + .接
触点法線回りのレール回転速度は零であるので,スピンすべり率は,
3 32( )2( ) , lr
r lr l r lr r v r r v
α φα φ ψ ψγ γ −+= + = − +
+ + ······························································ (2.62)
フランジ接触以外では,スピンすべり率は無視されることが多い.
左右クリープ力の和 yT ,および前後クリープ力によるヨーイングモーメント zM は,
2 2 0 1 1( / 2)( ), ( )y r l r l z r lT T T W a a M d T T= + + − = − ···················································· (2.63)
となる.ここで, ,r la a はそれぞれ車輪タイヤ踏面部の勾配,法線力は輪重 W の半分と仮定
した.したがって,左右方向とヨーイングの方程式は以下のようになる.
0 0 2322 23
0 0 0 0
22 11 0 11 0
0
22 2 ( )
2 2
y
e
d r fy Wmy k y f f yv d v d d r
f d f dmi k yv rψ
σ ψ εψ ε σ
γψ ψ ψ
⎫⎛ ⎞ ⎧ ⎫++ = − − − − − −⎨ ⎬ ⎪⎜ ⎟
⎪⎝ ⎠ ⎩ ⎭⎬⎪+ = − − ⎪⎭
························· (2.64)
ここに,m は輪軸の質量,i は輪軸ヨーイング回転半径, 21xk k dψ = および
0 0
2 , 2 ,r l e r lr r y y yd dε σγ α α φ− = − − = − =
( )
0 0 0 0 0 0 0 00
0 0 0 0 0 0
( ) { ( / )} ( / ),
{1 ( / )} 1 ( / ) ( ){1 ( / )} 1 ( / )ry wy wy
ery wy ry wy ry wy ry wy
d R d d R d Rd r R R R R d r R R R R
α α α ααγ εα α
+ + +≈ ≈ ≈ ≈
− − − − − −
0 00
0 0 0
dd r
ασ αα
≈ ≈−
························· (2.65)
x
y
ψ
/ 2xk / 2yk
v02d 12d
/ 2yk/ 2xk

85
また, ryR はレールの左右方向の曲率半径, wyR は車輪の左右方向の曲率半径である. 式(2.65)のスピンクリープ力の項,重力復元力項,輪軸ローリング角速度による項は小さい
ので,省略すると,次式となる.
22 22
211 0 11 02
0
2 2 0
2 2 0
y
e
ymy f k y fv
f d f dmi y kv r ψ
ψ
γψ ψ ψ
⎫+ + − = ⎪⎪⎬⎪+ + + =⎪⎭
····································································· (2.66)
上式は剛性行列が非対称である.式(2.66)の特性方程式は,
22222
211 0 11 02 2
0
2 2det 0
2 2
y
e
fm k fv
f d f dmi kr v ψ
λ λ
γ λ λ
⎡ ⎤+ + −⎢ ⎥⎢ ⎥ =⎢ ⎥+ +⎢ ⎥⎣ ⎦
····················································· (2.67)
展開すると,
22 2 4 2 2 3 2 2 211 22 0
11 0 22 22 11 02
11 22 0
0
2 4 2( ) ( )
4 0
y y
ey
m f f dm i f d i f m k i k f k f k dv v v
f f dk kr
ψ ψ
ψ
λ λ λ λ
γ
⎛ ⎞+ + + + + + +⎜ ⎟
⎝ ⎠
+ + =
··· (2.68)
式(1.27)のフルビッツの安定判別法から,系が漸近安定であるための条件,すなわち,蛇行
動(Meandering motion)が生じない走行速度の限界( 小)値 crv が求められる.ばね定数 ,yk kψ が
零ならば,容易に系は不安定となり,蛇行動を生じることがわかるであろう.
Tea Time 2.12 レールの波状摩耗
図 2.109(a)および(b)のように,レールの頭頂部が摩耗によって長手方向にうねりのパター
ンを形成する現象をレールの波状摩耗(Corrugation of rail)と言う(50)(51).直線路にも極まれに生
じるが,多くは曲線路に発生する.波状摩耗は数ヶ月でパターンが形成され,ワンワン…と
いう比較的低い騒音を発生する.キーと聞こえる車輪とレールのこすり音ではない.その原
因は台車の機構に起因する. クリープ特性はすべり率が小さい領域ではクリープ力がすべり率に比例して増加するが,
あるすべり率以上になると,一定のクリープ力に飽和する特性を持つ.波状摩耗は車輪とレ
ール間のクリープ力特性においてクリープ力の飽和点を超えた過大すべり率で発生する.大
まかに分類すると,波状摩耗は次の 2 つに分類される(図 2.109(c)参照). (1) レール不整などにより接触ばね系振動が発生すると,台車後軸における車輪径不足によ
る過大な縦クリープ(車輪のレール長手方向すべり)により車輪/レール間のスティック
スリップを伴う振動が発生し,波状摩耗が生成される.波状摩耗は内外軌道両側に発生
する. (2) 半径 100m 以内の急曲線路では,台車前軸車輪の左右方向(横)すべりが原因で,レー
ルの水平方向曲げとねじりの連成振動,いわゆるレールの小返り振動を誘発し,横圧,
輪重の変動も誘起され,横方向さらに縦方向も複合した車輪/レール間のスティックスリ
ップを伴う振動が発生し,波状摩耗が生成される.波状摩耗は内軌側にのみ発生する(図
2.109(a)参照). 対策として,レールの定期交換,曲線路での減速以外に,後車軸の車輪半径差不足による
縦クリープの低減および前車軸のアタック角による横クリープの低減を意図としたレール頭

86
(a) レール内軌側の波状摩耗 (b) 波状摩耗痕
(c) 曲率半径と波状摩耗を誘発する振動
図 2.109 レールの波状摩耗 (Video2-17, Video2-18)
頂面の非対称削正やスラック(カーブでのレール間隔)の拡大などによる車輪半径差必要量
の確保,およびクリープ力の減少や摩耗低減を目的として,レール頭頂部への塗油や固体潤
滑剤等による接触面の潤滑が効果的であると言われている. 福岡市地下鉄は博多駅から福岡空港まで 5 分をキャッチフレーズで開業したが,曲線路に
よるレール波状摩耗の発生が激しいために,今では 6 分に変更され,速度を落として走行し
ている.波状摩耗は列車の高速化を阻むのである.JR 在来線に乗ると,直線軌道のとき音は
聞こえないが,曲率の大きなカーブにさしかかると,大きなワンワン音が発生する.一方,
JR の鉄橋の上ではレールの波状摩耗は生じないとも言われる.
Tea Time 2.13 新幹線のノイズ
簡単に新幹線の騒音問題に触れよう.新幹線の騒音を 4 つに分類すると, (a) 車輪・レールに起因したノイズ 転動音,衝撃音,車輪の鳴きがある. (b) Collecting system からのノイズ スパークノイズ,スライディングノイズ,パンタグ
ラフの Air-borne noise があり,走行速度の 6 乗に比例する. (c) Structure-borne noise 車輪,レールなどからのノイズで,走行速度の 2 乗に比例する.

87
(d) 車両の Air-borne noise 車両からの風切り音で,走行速度の 6 乗に比例する. 車輪がレール上を転がりながら走行するときに発生するローリングノイズ(転動音)は,
車輪とレールの連成振動から生じ,走行速度の 1~2 乗に比例すると言われる.このシャーと
いう音を発する転動騒音のスペクトルは,時速 250km 程度では 1kHz 付近になだらかなピー
クを持つ.その主な原因は,日本ではレールの垂直方向の振動であると言われる.このよう
にローリングノイズはレールの粗さに起因した車輪とレールの連成強制振動である.一方,
空力音(風切り音)と言われる流体の自励振動に起因する騒音は走行速度の上昇とともに大
きな社会問題となってきている.なにしろこの空力音は走行速度の 6 乗に比例する厄介な騒
音であり,通常の対策では解決は不可能である.走行速度が約 270~300km/h を超えると,ロ
ーリングノイズよりもこの空力音が も大きな騒音となる. 空力音の一つである新幹線のパンタグラフから出る騒音はどの様な対策を講じているので
あろうか.新幹線のパンダグラフにはカバーがかかっており,カバーによる防音対策を施し
ている.JR では,パンタグラフをカバーから 50cm 以上出す条件が課せられているため,パ
ンタグラフ全体をカバー内部に入れ込むことはできない.このカバーにより,流れにはく離
を起こさせて流速を落とす.すると,1kHz から 300Hz の騒音へと変化する.いわゆる,騒音
の音色を変えることができる.カバーを取り付けることによってエネルギー(音圧)自体は
変わらないか,反って大きくなっているかもしれないが,1kHz から 300Hz の周波数変化によ
って人間には騒音への感度が鈍くなる.人間の耳の感度は周波数によって大きく異なり,人
間の耳の も敏感な周波数領域は,1kHz~3kHz である. ローリングノイズの発生メカニズムを解明するためには,車輪がレール上を転動するとき
に車輪とレール間の接触領域にどの様な力が作用するかを知らねばならない.接触領域はヘ
ルツの接触理論から新幹線でおよそ直径 10mm の円に近いことはすでに述べた.この領域に
はすべり領域と凝着領域が混在する.接触領域のわずかなすべりによってすべり方向の力,
車輪とレールの相対的な傾き角および横方向相対速度に比例する軸方向の力および接触領域
に垂直な軸まわりのスピンモーメントが作用する. 車輪とレールの連成振動(52)-(61)を解析するための主要素として,レール上下方向では,車輪
を剛体,レールを分布ばねで支持された曲げ振動する無限長はりと見なし,車輪とレールの
弾性接触ばねを介した連成振動を取り扱う.接触点がレール頭頂部からずれるために,垂直
方向の振動と水平方向の振動が連成する.レールの水平方向では,レールのこがえり振動を
考慮する.車輪を厚い連続体円板,レールを曲げねじり連成振動するはりと見なす.車輪と
レールの接触領域にはクリープ力が作用するとする. 励振源として,レール表面の垂直方向うねり・凸凹(強制変位)を考える.計算の結果,
車輪とレールの連成振動では,レールの垂直方向,レール・車輪の水平方向および車輪の垂
直方向の順に振動は大きいこと,レールの垂直方向振動にはローリングノイズにある 1kHz近傍にピークを持つスペクトルを有することが明らかになり,新幹線の実験結果とよい一致
を見ることができた.レールは無限に長いので,垂直,水平方向には共振振動数は存在しな
い. 2.4.2 シミー
駅で荷物を運ぶための荷台の車輪が移動しながら左右に激しく振動しているのを見たこと
があるであろう.この現象も車輪とプラットホームの間のクリープ力に起因した自励振動で
ある.これと同じような現象が,図 2.110 に見るシミー(Shimmy)と呼ばれるものである(62)(63).

88
図 2.110 シミー (Video2-19)
図 2.111 荷台のシミー解析モデル
図 2.110 のシミーの解析モデルを図 2.111 に示す.荷台は剛体とし,質量を m,重心 G 回り の慣性モーメントを zI とする.荷台は一定速度 V で矢印の方向に移動する.荷台の重心 G か
ら前方 l1の位置 A をばね定数 k のばねで横方向に拘束している.荷台の車輪は重心 G から後
方に l2離れて取り付けられている.走行中の位置 A の横方向変位を x,AG と荷台の進行方向
間の角変位をθとする.タイヤ部に作用する横(x)方向クリープ力を 1X および 2X と置く. 荷台の横方向と重心 G 回りの回転運動の運動方程式は,それぞれ次式となる.
1 1 2
1 1 2 2
( ) ( )
( )z
m x l kx X X
I kl x X X l
θ
θ
⎧ + = − − +⎪⎨
= − +⎪⎩ ···················································································· (2.69)
タイヤは横すべりをしないとすると,次の関係が成り立つ.
1 2( ) tanx l lV
θ θ θ+ +− = ≈ ··························································································· (2.70)
式(2.69)から横方向摩擦力 1 2X X+ を消去すると, 2 1 2 1 2( ) ( ) 0zml x ml l I k l l xθ+ − + + = 上式と式(2.70)から,特性根をλ とすると,特性方程式は次式となる.
2 22 1 2 1 2
1 2
( ) ( )det 0( )
zml k l l ml l Il l V
λ λλ λ
⎡ ⎤+ + −=⎢ ⎥
+ +⎣ ⎦
⇒ 2 3 2 22 2 1 2 1 2( ) ( ) ( ) 0zml I ml V k l l k l l Vλ λ λ+ + + + + + = ········································ (2.71)
これにフルビッツの安定判別法を適用すると,漸近安定の条件は次式となる. 1 2 0zml l I− > ··················································································································· (2.72)
○
○
Gkタイヤ 1
タイヤ 2
x
クリープ力
X2
l1
クリープ力 X1
V
l2
θ
A
×
O

89
式(2.72)は通常の荷台では満足されない.たとえば,重心 G が回転軸上 O にあると, 2 0l =
だから,不安定となることがわかる.
付録 2.1 ワイングラスの鳴きの解析
ワイングラスの飲み口を指で円周方向に擦ると,グラスは鳴きを生じる.生じた鳴き振動
モードはグラスの円周方向を等間隔に 2 つの直径節をもつ単独の 2 節モードであった.ここ
では,グラスを薄肉円筒シェルでモデル化して,このワイングラスの鳴き現象を解析する.
薄肉円筒シェルに対しては,Flugge理論(64)(65)(66)の基礎方程式を使用する.
図 A2.1.1 ワイングラスの静止座標系
(1)自由振動解析
図 A2.1.1 に示すように,半径 R,軸方向長さ l の薄肉円筒シェルを考える.xは軸方向座標, θ は円周方向座標,t は時間とする.外力が作用しないときの運動方程式は以下のように表さ
れる (64) (65). 2
2
2
2 2
2 2 2 2 2
2 2 2 2
1 0
1 1 1 0
1 1 1 0
x x
x x
x x x
N N uhx R t
N N M M vhx R R x R tM M M M N whx R x R x R R t
θ
θ θ θ θ
θ θ θ θ
ρθ
ρθ θ
ρθ θ θ
∂ ∂ ∂+ − =
∂ ∂ ∂∂ ∂ ∂ ∂ ∂
+ + + − =∂ ∂ ∂ ∂ ∂
∂ ∂ ∂ ∂ ∂+ + + − − =
∂ ∂ ∂ ∂ ∂ ∂ ∂
........... (A2.1.1)
ここに, , , ,x x xN N N Nθ θ θ はせん断力, , , ,x x xM M M Mθ θ θ はモーメント, R は半径, hはシ
ェルの厚さ, ρ は密度, ( , , ), ( , , ), ( , , )u u x t v v x t w w x tθ θ θ= = = はそれぞれシェル中央面におけ
る軸,円周,半径方向の変位である.また,ν はポアソン比,E は縦弾性係数であり, 2 2 2 2
2 2 2 3 2
1,1 12 1 12x
Eh u v h w Eh u v h wN w N w wx R R x x R Rθ
ν νν θ ν θ θ
⎧ ⎫⎧ ⎫ ⎛ ⎞∂ ∂ ∂ ∂ ∂ ∂⎪ ⎪⎛ ⎞ ⎛ ⎞= + + − = + + + +⎨ ⎬ ⎨ ⎬⎜ ⎟⎜ ⎟ ⎜ ⎟− ∂ ∂ ∂ − ∂ ∂ ∂⎝ ⎠ ⎝ ⎠⎪ ⎪⎩ ⎭ ⎝ ⎠⎩ ⎭
2 2
2
12(1 ) 12x
Eh u v h v wNR x R x xθ ν θ θ
⎧ ⎫⎛ ⎞∂ ∂ ∂ ∂⎪ ⎪= + + −⎨ ⎬⎜ ⎟+ ∂ ∂ ∂ ∂ ∂⎪ ⎪⎝ ⎠⎩ ⎭
2 2
2
1 12(1 ) 12x
Eh u v h u wNR x R R xθ ν θ θ θ
⎧ ⎫⎛ ⎞∂ ∂ ∂ ∂⎪ ⎪= + + +⎨ ⎬⎜ ⎟+ ∂ ∂ ∂ ∂ ∂⎪ ⎪⎝ ⎠⎩ ⎭
r
x
θO

90
3 2 2 3 2 2
2 2 2 2 2 2 2 2 2
3 2 3 2
1 1,12(1 ) 12(1 )
1 1,12 (1 ) 12 (1 ) 2 2
x
x x
Eh w w v u Eh w w wM Mx R R x x R R
Eh v w Eh w u vM MR x x R x R x
θ
θ θ
ν νν θ θ ν θ
ν θ ν θ θ
⎧ ⎫⎛ ⎞ ⎧ ⎫∂ ∂ ∂ ∂ ∂ ∂⎪ ⎪= − + − − = − + +⎨ ⎬ ⎨ ⎬⎜ ⎟− ∂ ∂ ∂ ∂ − ∂ ∂⎪ ⎪⎝ ⎠ ⎩ ⎭⎩ ⎭⎧ ⎫ ⎧ ⎫∂ ∂ ∂ ∂ ∂
= − − + = − + −⎨ ⎬ ⎨ ⎬+ ∂ ∂ ∂ + ∂ ∂ ∂ ∂⎩ ⎭ ⎩ ⎭
......................... (A2.1.2) 式(A2.1.2)を式(A2.1.1)に代入すると,変位 , ,u v wに関する運動方程式が得られる.
2 2 2 3 3 22 2
2 2 3 2 2
2 2 2 3 22 2
2 2 2 2
3 3 32 2
3 2 2
1 1 1(1 )2 2 2
1 1 3(1 3 )2 2 2
1 32 2
u u v w w w ut
u v v w w vt
u u u v v
ν ν νκ κ ν γξ θ ξ θ ξ ξ θ ξ
ν ν νκ κ γξ θ ξ θ ξ θ θ
ν νκ ν κξ ξ θ ξ ξ θ θ
⎛ ⎞∂ − ∂ + ∂ ∂ − ∂ ∂ ∂+ + + − − + =⎜ ⎟∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂⎝ ⎠
+ ∂ − ∂ ∂ − ∂ ∂ ∂+ + + − + =
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
⎛ ⎞∂ − ∂ ∂ − ∂ ∂− − + − +⎜ ⎟∂ ∂ ∂ ∂ ∂ ∂ ∂⎝ ⎠
4 4 2 4 2
24 2 2 2 4 22 2w w w w ww w
tκ γ
ξ ξ θ θ θ⎛ ⎞∂ ∂ ∂ ∂ ∂
+ + + + + + = −⎜ ⎟∂ ∂ ∂ ∂ ∂ ∂⎝ ⎠ ............................ (A2.1.3)
ここに, 2 2 2/12h Rκ = , 2/(1 )pE Eh ν= − , 2 / phR Eγ ρ= , /x Rξ = .
長さ l の円筒形をしたワイングラスの境界条件を以下のように置く.
(i) グラスの底部 0x = で,固定端: 0, 0, 0, 0wu v wx
∂= = = =
∂ ....................... (A2.1.4)
(ii) グラスの飲み口 x l= で,自由端: 0, 0, 0, 0x x x xN S F Mθ= = = = ................ (A2.1.5) ここに, xF , xS θ は等価せん断力であり,
22
2 2
22 2
3 2 2 2 3 3
3 2 2 2 3 2
3
(1 )
(1 3 ) 32 (1 )
1 1
1 3 (2 )12 (1 ) 2 2
12
x
xx x
x x xx
x
Eh u v wN wR
M Eh u v wS NR R
M M MFx R R
Eh u u v w wR
EhM
θθ θ
θ θ
ν ν κν ξ θ ξ
κ κν θ ξ ξ θ
θ θν ν ν
ν ξ θ ξ θ ξ ξ θ
⎛ ⎞∂ ∂ ∂= + + −⎜ ⎟− ∂ ∂ ∂⎝ ⎠
⎧ ⎫∂ ∂ ∂= + = + + −⎨ ⎬+ ∂ ∂ ∂ ∂⎩ ⎭
∂ ∂ ∂= + +
∂ ∂ ∂⎧ ⎫∂ − ∂ − ∂ ∂ ∂
= − + − − −⎨ ⎬− ∂ ∂ ∂ ∂ ∂ ∂ ∂⎩ ⎭
= −2 2
2 2 2 2(1 )w u w v
Rν
ν ξ ξ θ θ⎧ ⎫⎛ ⎞∂ ∂ ∂ ∂⎪ ⎪− + −⎨ ⎬⎜ ⎟− ∂ ∂ ∂ ∂⎪ ⎪⎝ ⎠⎩ ⎭
.......... (A2.1.6)
空間と時間の変数分離および円周方向の振動モードを以下のように置く.
( , , ) ( )cos cos( , , ) ( )sin cos( , , ) ( )cos cos
u t U n tv t V n tw t W n t
ξ θ ξ θ ωξ θ ξ θ ωξ θ ξ θ ω
⎫=⎪
= ⎬⎪= ⎭
..................................... (A2.1.7)
式(A2.1.7)を式(A2.1.3)に代入すると, 2 3
2 2 2 2 2 22 3
1 1 1(1 ) 02 2 2
d U dV d W dWn U n nd d d d
ν ν νγω κ κ ν κξ ξ ξ ξ
− + −⎧ ⎫ ⎛ ⎞+ − + + − + − =⎨ ⎬ ⎜ ⎟⎩ ⎭ ⎝ ⎠
2 22 2 2 2
2 2
1 1 3(1 3 ) ( ) 02 2 2
dU d V d Wn n V n nWd d d
ν ν νκ γω κξ ξ ξ
+ − −− + + + − + − =
3 2 42 2 2 2 2
3 2 4
1 32 2
d U dU d V d Wn n nVd d d d
ν νκ ν κ κ κξ ξ ξ ξ
− −⎛ ⎞− + − − + +⎜ ⎟⎝ ⎠

91
2
2 2 2 4 2 2 2 222 ( 2 1 ) 0d Wn n n W
dκ κ κ κ γω
ξ− + − + + − = ............................... (A2.1.8)
上式は定数係数を持つ連立常微分方程式である.この基本解を以下のように置く. 1 2 3, ,U c e V c e W c eλξ λξ λξ= = = .................................. (A2.1.9) 式(A2.1.9)を式(A2.1.8)に代入すると,
1 2 3 1
1 2 3 2
1 2 3 3
U U U cV V V cW W W c
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ =⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
0 ................................. (A2.1.10)
ここに,
2 2 2 2 2 3 2 21 2 3
2 2 2 2 2 21 2 2 3
2 3 2 2 2 21 3 2 3
2 4 2 2 2 2 2 23
1 1 1(1 ) , ,2 2 2
1 1 3, (1 3 ) ,2 2 2
1 3, ,2 2
2 1 ( 1)
U n U n U n
V n U V n V n n
W n U W n n V
W n n
ν ν νλ γω κ λ κ λ ν κ λ
ν ν νλ κ λ γω κ λ
ν νκ λ ν κ λ κ λ
κ λ κ λ κ γω
− + −⎛ ⎞= + − + = = − + −⎜ ⎟⎝ ⎠
+ − −= − = − = + + − = −
− −⎛ ⎞= − + − = = − + = −⎜ ⎟⎝ ⎠
= − + + − −
......(A2.1.11)
係数 1 2 3, ,c c c が非自明解を持つための条件から,
1 2 3
1 2 3
1 2 3
det 0U U UV V VW W W
⎡ ⎤⎢ ⎥ =⎢ ⎥⎢ ⎥⎣ ⎦
➪ 8 6 4 20 1 2 3 4 0a a a a aλ λ λ λ+ + + + = ........... (A2.1.12)
ここに,
2 2 20
2 2 2 21
2 2 2 2 2 2 2 2 2 2
22 2 2 4 2
1(1 ) (1 3 )2
(1 )( )
1 1 1(1 3 ) 2 (1 ) 22 2 2
1 1 (3 )(3 )2 2 4
a
a n
n n n
n n
νκ κ κ
κ κ γω
ν ν νκ κ κ γω κ κ ν κ
ν ν νκ ν κ κ
−= − +
= − −
⎡ ⎤− − −⎧ ⎫ ⎛ ⎞+ + − + − + + −⎨ ⎬ ⎜ ⎟⎢ ⎥⎩ ⎭ ⎝ ⎠⎣ ⎦+ + −⎧ ⎫+ − − +⎨ ⎬
⎩ ⎭
22 2 2 2 2 2 2 2 2 2 2 2
2
2 2 2 2 2 2 2 2 2 2 2
2 2 2 2 2 2
24
1 1 1(1 3 ) 1 ( 1) 2 (1 )2 2 2
1 1( ) 2 (1 ) 22 2
3 12 (1 ) (1 )2 2
(3 )4
a n n n n
n n n n
n n n
ν ν νκ κ γω κ γω κ ν κ
ν νγω κ κ γω κ κ ν κ
ν νκ ν ν κ ν κ
ν κ
⎡ ⎤− − −⎧ ⎫ ⎛ ⎞= + + − − − − + − −⎢ ⎥⎨ ⎬ ⎜ ⎟⎩ ⎭ ⎝ ⎠⎢ ⎥⎣ ⎦
⎡ ⎤− −⎧ ⎫ ⎛ ⎞+ − − + − + + −⎨ ⎬ ⎜ ⎟⎢ ⎥⎩ ⎭ ⎝ ⎠⎣ ⎦− −⎛ ⎞− − + + −⎜ ⎟
⎝ ⎠
++
22 2 2 2 2 41 (1 )(1 )
2 2n n nν νγω κ κ− −⎧ ⎫− + −⎨ ⎬
⎩ ⎭
22 2 2 2 2 2 2 2 2 2 2 2 2
31 1( ) 1 ( 1) 2 (1 )
2 2a n n n n nν νγω κ γω κ γω κ ν κ
⎡ ⎤− −⎧ ⎫ ⎛ ⎞= − + − − − − + − −⎢ ⎥⎨ ⎬ ⎜ ⎟⎩ ⎭ ⎝ ⎠⎢ ⎥⎣ ⎦
2 2 2 2 2 2 2 2 2 21 1(1 ) (1 3 ){1 ( 1) } (3 )2 2
n n nν νγω κ κ κ γω ν κ− −⎧ ⎫⎡ ⎤+ − + + + − − − −⎨ ⎬⎢ ⎥⎩ ⎭⎣ ⎦
22 2 2 2 2 2 2 2 21 (1 )(1 ) {1 ( 1) }
2 4n n n n nν νν ν κ κ γω− +⎛ ⎞− + − + + + − −⎜ ⎟
⎝ ⎠

92
2 2 2 2 2 2 2 2 2 24
1 (1 ) [( ){1 ( 1) } ]2
a n n n nνγω κ γω κ γω−⎧ ⎫= − + − + − − +⎨ ⎬⎩ ⎭
................................... (A2.1.13) 式(A2.1.12)の根を 1 4 1 4, , , , ,λ λ λ λ⋅ ⋅ ⋅ − ⋅ ⋅ ⋅ − とすると,定数 1 2 3, ,c c c の比が定められる.
3 31 2 1
3 31 2 2
U cU U cV cV V c
−⎡ ⎤⎡ ⎤ ⎡ ⎤= ⎢ ⎥⎢ ⎥ ⎢ ⎥ −⎣ ⎦ ⎣ ⎦ ⎣ ⎦
......................... (A2.1.14)
1
3 32 2
31 12
3
( )1( )( )
u
v
cc U kV U
V kV Ucc
λλλ
⎡ ⎤⎢ ⎥ −− ⎡ ⎤ ⎡ ⎤⎡ ⎤⎢ ⎥ = ≡⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ −−Δ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦⎢ ⎥⎣ ⎦
............................................... (A2.1.15)
ここに,
2 2 2 2 2 2 2 2
2 2
1 1 1( ) (1 3 )( ) 2 2
1 32 2
uk n n
n n n
ν νλ λ κ λ ν κ κ λ γωλ
ν νλ κ λ
⎡ ⎧ ⎫− −⎛ ⎞ ⎧ ⎫= − − + + −⎨ ⎬⎨ ⎬⎢ ⎜ ⎟Δ ⎝ ⎠ ⎩ ⎭⎩ ⎭⎣⎤+ −⎛ ⎞+ −⎜ ⎟⎥⎝ ⎠⎦
2 2 2 2 2
2 2 2 2 2 2
1 1 1( )( ) 2 2
1 3(1 )2 2
vk n n
n n n
ν νλ λ κ λ ν κλ
ν νλ γω κ κ λ
⎡ ⎧ ⎫+ −⎛ ⎞= − −⎨ ⎬⎢ ⎜ ⎟Δ ⎝ ⎠⎩ ⎭⎣⎤− −⎧ ⎫⎧ ⎫− + − + −⎨ ⎬⎨ ⎬⎥⎩ ⎭⎩ ⎭⎦
22 2 2 2 2 2 2 2 2 21 1 (1 )( ) (1 ) (1 3 )
2 2 4n n nν ν νλ λ γω κ κ λ γω λ− − +⎧ ⎫⎧ ⎫Δ = + − + + + − +⎨ ⎬⎨ ⎬
⎩ ⎭⎩ ⎭
......... (A2.1.16) また,次の関係が成り立つ. ( ) ( ), ( ) ( )u u v vk k k kλ λ λ λ− = − − = ............. (A2.1.17)
したがって,式(A2.1.8)の一般解は,
44
3 31
44
3 31
44
3 31
( ) [ ( ) ( ) ]
( ) [ ( ) ( ) ]
( ) [ ]
j j
j j
j j
j ju j u j
j
j jv j v j
j
j j
j
U k c e k c e
V k c e k c e
W c e c e
λ ξ λ ξ
λ ξ λ ξ
λ ξ λ ξ
ξ λ λ
ξ λ λ
ξ
−+
=
−+
=
−+
=
⎫= − ⎪
⎪⎪⎪= − ⎬⎪⎪⎪= +⎪⎭
∑
∑
∑
............ (A2.1.18)
上式を変形すると,式(A2.1.18)の実数表示の基本解を得る.
41 2
1
41 2
1
41 2
1
( ) [ ( ) sinh ( ) cosh ]
( ) [ ( ) cosh ( ) sinh ]
( ) [ cosh sinh ]
u j j j u j j jj
v j j j v j j jj
j j j jj
U k A k A
V k A k A
W A A
ξ λ λ ξ λ λ ξ
ξ λ λ ξ λ λ ξ
ξ λ ξ λ ξ
=
=
=
⎫= + ⎪
⎪⎪⎪= + ⎬⎪⎪⎪= +⎪⎭
∑
∑
∑
............... (A2.1.19)
ここに, 1 2, ( 1, ,4)j jA A j = は定数である.しかし, jλ は一般に,複素根であるので,形式的
な表示に過ぎない可能性が高い. , ,u v wが実変数であるから,基本的には, ( ), ( ), ( )U V Wξ ξ ξ は 実関数である.しかし,定数 1 2, ( 1, ,4)j jA A j = は複素数である.

93
a. 境界条件 0ξ = での式(A2.1.4)および /l Rξ = での式(A2.1.5)に式(A2.1.19)を代入して,1 2, ( 1, ,4)j jA A j = に関する 4×4 の同次方程式を得る.たとえば,式(A2.1.4)は次式で表される.
4 42 1
1 1
4 41 2
1 1
(0) ( ) 0, (0) ( ) 0
(0) 0, (0) / 0
u j j v j jj j
j j jj j
U k A V k A
W A dW d A
λ λ
ξ λ
= =
= =
⎫= = = = ⎪
⎪⎬⎪= = = =⎪⎭
∑ ∑
∑ ∑ ........................ (A2.1.20)
b. 振動数方程式 上記の 4×4 同次方程式から係数が非自明解となる条件から, 2( )ω =G A 0 → 振動数方程式 2det ( ) 0ω =G ................................................ (A2.1.21) ここに, 1 1 2 2
1 4 1 4( )TA A A A=A .式(A2.1.21)が固有振動数を決定する振動数方程式である. c. 固有モード 式(A2.1.21)で求められた固有振動数 msω (円周方向の波数 m,軸方向の
次数 s)に対して,係数 1 2, ( 1,...,4)j jA A j = の比が求められ,それを式(A2.1.19)に代入すること
により,固有モードが求められる. d. 直交条件 ( , )m s モードを円周方向波数 m,軸方向モード次数 s の固有モードとする
と,式(A2.1.1)の自由振動の方程式から,次式が得られる.
, , 2,
, , , , 2,2
2 2 2 2, , , , , 2
,2 2 2
1 0
1 1 1 0
1 1 1 0
x ms x msms ms
x ms ms x ms msms ms
x ms x ms x ms ms msms ms
N Nh u
x RN N M M
h vx R R x R
M M M M Nh w
x R x R x R R
θ
θ θ θ θ
θ θ θ θ
ρ ωθ
ρ ωθ θ
ρ ωθ θ θ
∂ ∂+ + =
∂ ∂∂ ∂ ∂ ∂
+ + + + =∂ ∂ ∂ ∂
∂ ∂ ∂ ∂+ + + − + =
∂ ∂ ∂ ∂ ∂ ∂
.... (A2.1.22)
ここに, , ,,x ms x msN M などは ( , )m s モードのせん断力,モーメントを表す. 式(A2.1.22)の両辺におのおの第1式から順に , , ,, ,kl kl klu v w をかけて辺々加え合わせ,円筒グ
ラス全体にわたって面積分する.
, , 2, , ,
, , , , 2, , ,2
2 2 2 2, , , ,
2 2
1
1 1 1
1 1 1
x ms x mskl ms ms kl
x ms ms x ms mskl ms ms kl
x ms x ms x ms m
N Nu h u u Rdxd
x R
N N M Mv h v v Rdxd
x R R x R
M M M Mx R x R x R
θ
θ θ θ θ
θ θ θ
ρ ω θθ
ρ ω θθ θ
θ θ
⎧ ⎫∂ ∂⎛ ⎞⎪ ⎪+ +⎨ ⎬⎜ ⎟∂ ∂⎪ ⎪⎝ ⎠⎩ ⎭⎧ ⎫∂ ∂ ∂ ∂⎛ ⎞⎪ ⎪+ + + + +⎨ ⎬⎜ ⎟∂ ∂ ∂ ∂⎪ ⎪⎝ ⎠⎩ ⎭
∂ ∂ ∂ ∂+ + + +
∂ ∂ ∂ ∂ ∂
∫∫
∫∫
, 2, , ,2 0s mskl ms ms kl
Nw h w w Rdxd
Rθ ρ ω θ
θ
⎧ ⎫⎛ ⎞⎪ ⎪− + =⎜ ⎟⎨ ⎬⎜ ⎟∂⎪ ⎪⎝ ⎠⎩ ⎭∫∫
........................................... (A2.1.23) 上式を部分積分すると,
2, , , , , ,
, , , , , , , ,, , 2
2, , , , ,
, 2 2
( )
1 1 1
ms ms kl ms kl ms kl
kl x ms kl x ms kl ms ms klx ms x ms
kl x ms x ms kl msx ms
h u u v v w w Rdxd
u N u M v N M vN N
x R R x R R
w M M w MM
x R R x R
θ θ θ θθ
θ θ θ
ρ ω θ
θ θ
θ θ
+ +
⎡ ∂ ∂ ∂ ∂⎛ ⎞ ⎛ ⎞ ⎛ ⎞− + + + + +⎢⎜ ⎟ ⎜ ⎟ ⎜ ⎟∂ ∂ ∂ ∂⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎣
∂ ∂ ∂ ∂ ∂⎛ ⎞− + + + +⎜ ⎟∂ ∂ ∂ ∂ ∂⎝ ⎠
∫∫
∫∫
, ,,
2 , , , , ,, , , , , ,0
0
1 1
kl mskl
lx ms x ms x ms x ms kl
x ms kl x ms kl kl x ms
w Nw Rdxd
R
M M M M wR N u N v w M d
R x R R x
θ
π θ θ θθ
θθ θ
θθ θ
⎤∂+ ⎥
∂ ⎥⎦
⎡ ⎤∂ ∂ ∂ ∂⎛ ⎞ ⎛ ⎞+ + + + + + −⎢ ⎥⎜ ⎟ ⎜ ⎟∂ ∂ ∂ ∂⎝ ⎠ ⎝ ⎠⎣ ⎦
∫
2
, , ,2 200
1 0l x
kl kl klN N M Mu v w dxR R R R
πθ θ θ θ
θ⎡ ⎤∂⎛ ⎞+ + + + =⎜ ⎟⎢ ⎥∂⎝ ⎠⎣ ⎦
∫
........................................... (A2.1.24)

94
上式の第 3 項および第 4 項は境界条件式(A2.1.2), (A2.1.3)および円周方向連続性から,零とな
る. 2
, , , , , , ,( ) 0ms ms kl ms kl ms kl ms klh u u v v w w Rdxd Rdxdρ ω θ Δ θ+ + − =∫∫ ∫∫ ................................ (A2.1.25)
ここに,
, , , , , , , ,, , , 2
2, , , , , , ,
, ,2 2
1 1
kl x ms kl x ms kl ms ms klms kl x ms x ms
kl x ms x ms kl ms kl msx ms kl
u N u M v N M vN N
x R R x R R
w M M w M w NM w
x R x R R
θ θ θ θθ
θ θ θ θ
θ θ
θ θ θ θ
∂ ∂ ∂ ∂⎛ ⎞ ⎛ ⎞Δ = + + + + +⎜ ⎟ ⎜ ⎟∂ ∂ ∂ ∂⎝ ⎠ ⎝ ⎠
∂ ∂ ∂ ∂ ∂ ∂⎛ ⎞− + + + +⎜ ⎟∂ ∂ ∂ ∂ ∂ ∂⎝ ⎠
, , ,
, , , ,
( )cos , ( )sin , ( )cos
( )cos , ( )cosms ms ms ms ms ms
x ms x ms ms ms
u U x m v V x m w W x m
N N x m N N x mθ θ
θ θ θ
θ θ
= = =
= =
, , , ,
, , , ,
, , , ,
( )sin , ( )sin
( )cos , ( )cos
( )sin , ( )sin
x ms x ms x ms x ms
x ms x ms ms ms
x ms x ms x ms x ms
N N x m N N x m
M M x m M M x m
M M x m M M x m
θ θ θ θ
θ θ
θ θ θ θ
θ θ
θ θ
θ θ
= =
= =
= =
もしも,m k≠ であれば, , 0ms kl RdxdθΔ =∫∫ となるので,直交条件は次式となる.
, , , , , ,( ) 0ms kl ms kl ms klu u v v w w Rdxdθ+ + =∫∫ ............................................ (A2.1.26)
(2)自励振動解析
図 A2.1.1 に示すように,空間に固定された静止座標系 ( , , )r xθ において,円筒シェルは 0x =が固定, x l= が自由で,x 軸のまわりを非常にゆっくりと一定角速度Ω で回転しているとす
る.この角速度が指の円周方向の移動速度となる.また,グラス飲み口上の空間固定点
, 0,r R x lθ= = = において,指を介して x 方向の押し付け荷重 P を作用させると,グラスの円
周方向に摩擦力 P Pμ= ( μ :摩擦係数)が作用する.そのとき,静止座標系 ( , , )r xθ から見た
薄肉円筒の運動方程式は次式となる. 2
2
2
22 2 2 2
2 2 2
1 ( ) ( ) 0
1 1 1 ( ) ( ) 0
1 1 1 0
x x
x x
x x x
N N Ph u x lx R t R
N N M M Ph v x lx R R x R t R
M M M M N h wx R x R x R R t
θ
θ θ θ θ
θ θ θ θ
ρ Ω δ θ δθ θ
μρ Ω δ θ δθ θ θ
ρ Ωθ θ θ θ
∂ ∂ ∂ ∂⎛ ⎞+ − + − − =⎜ ⎟∂ ∂ ∂ ∂⎝ ⎠
∂ ∂ ∂ ∂ ∂ ∂⎛ ⎞+ + + − + − − =⎜ ⎟∂ ∂ ∂ ∂ ∂ ∂⎝ ⎠
∂ ∂ ∂ ∂ ∂ ∂⎛ ⎞+ + + − − + =⎜ ⎟∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂⎝ ⎠
.... (A2.1.27)
ここに, ( )δ ⋅ は Dirac のデルタ関数である. 静止空間 ( , )x θ における変位応答を,
対称モード:
,
,
,
( , ) ( )cos
( , ) ( )sin
( , ) ( )cos
kl kl
kl kl
kl kl
u x U x k
v x V x k
w x W x k
θ θ
θ θ
θ θ
⎫=⎪⎪= ⎬⎪= ⎪⎭
と反対称モード:
,
,
,
( , ) ( )sin( , ) ( )cos( , ) ( )sin
kl kl
kl kl
kl kl
u x U x kv x V x kw x W x k
θ θθ θθ θ
⎫=⎪
= − ⎬⎪= ⎭
...........................(A2.1.28a,b) の重ね合わせで表す.それを以下に示す.
( , , ) ( )( cos sin ),
( , , ) ( )( sin cos ),
( , , ) ( )( cos sin )
ms ms msms
ms ms msms
ms ms msms
u x t U x C m D m
v x t V x C m D m
w x t W x C m D m
θ θ θ
θ θ θ
θ θ θ
= +
= −
= +
∑∑∑
..................................... (A2.1.29)

95
,
,
,
,
( , , ) ( )( , , ) ( )
( cos sin ),( , , ) ( )( , , ) ( )
x x ms
msms msms
x x ms
ms
N x t N xN x t N x
C m D mM x t M xM x t M x
θ θ
θ θ
θθ
θ θθθ
⎡ ⎤⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥ = +⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥
⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
∑
,
,
,
,
( , , ) ( )( , , ) ( )
( sin cos )( , , ) ( )( , , ) ( )
x x ms
x x msms msms
x x ms
x x ms
N x t N xN x t N x
C m D mM x t M xM x t M x
θ θ
θ θ
θ θ
θ θ
θθ
θ θθθ
⎡ ⎤⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥ = −⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥
⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
∑
ここに,m は節直径数 ( 0,1, )= ,s はグラス軸方向のモード次数 ( 0,1, )= ,記号 msΣ は添え字
m, s に対する二重総和を表し, ,ms msC D は ( , )m s モードの未定の時間関数である. 式(A2.1.29)を式(A2.1.27)に代入し,固有関数の条件式(A2.1.22)を用いると,次式を得る.
( cos sin ) ( ) ( ) /( sin cos ) ( ) ( ) /( cos sin ) 0
ms ms ms ms
ms ms ms ms
ms ms ms ms
h U m m P x l Rh V m m P x l Rh W m m
ρ α θ β θ δ θ δρ α θ β θ μ δ θ δρ α θ β θ
⎫Σ + = − −⎪
Σ − = − − ⎬⎪Σ + = ⎭
................. (A2.1.30)
ここに, 2 2 2
2 2 2
2 ( )
2 ( )ms ms ms ms ms
ms ms ms ms ms
C m D m C
D m C m D
α Ω ω Ω
β Ω ω Ω
⎫= + + − ⎪⎬
= − + − ⎪⎭ ............................... (A2.1.31)
ここで,摩擦係数 μ を相対速度 rv に関して負の勾配をもつ線形関数と仮定する.
0 10
, x lr re e v v R vt θ
μ Ω Ωθ
==
∂ ∂⎛ ⎞= − = − +⎜ ⎟∂ ∂⎝ ⎠ ............................................................... (A2.1.32)
ここに, 0 1, 0e e > .
式(A2.1.30)の第 1 式から第 3 式におのおの式(A2.1.28a)を掛け合わせて加え合わせ,また,
式(A2.1.30) の第 1 式から第 3 式におのおの式(A2.1.28b)を掛け合わせて加え合わせ,さらに,
積分をして,直交条件(A2.1.26)を使用すると, 2 2 2
2 2 2
2 ( ) ( )
2 ( ) ( )
ms ms ms ms ms msms
ms ms ms ms ms msms
PC m D m C U lL
PD m C m D V lL
α Ω ω Ω
μβ Ω ω Ω
= + + − = −
= − + − = − ...................... (A2.1.33)
ここに, 2 2 2
0( )
l
ms ms ms msL hR U V W dxπρ= + +∫ .上式から, ,ms msC D が求められる.
今,ワイングラスの鳴きが多重モード(内部共振)ではなく,実験で発生したように,半
径方向に 2 つの直径節をもつ振動モード( 2, 0m s= = )が単一に発生すると仮定してみよう(も
しも,内部共振の発生の可能性がある場合は,関連するモードと非線形摩擦特性を考慮に入
れた,非線形振動解析が必要である).そのとき,式(A2.1.33)は, ( , )m s モードのみに関連し
た次の連立方程式となる. 2 2 2
2 2 20 1
2 ( ) ( )
( )2 ( ) { ( )( )} 0
ms ms ms ms msms
msms ms ms ms ms ms ms
ms
PC m D m C U lL
PV lD m C m D e e R V l D m CL
Ω ω Ω
Ω ω Ω Ω Ω
+ + − = −
⎡ ⎤− + − + − − − + =⎣ ⎦
................................... (A2.1.34)
上式の第 2 式の msD に関する方程式の中に,負性抵抗の項2
1( )ms
msms
PV l e DL
⎛ ⎞−⎜ ⎟
⎝ ⎠が現れており,

96
指の位置では円周方向のみの振動成分を持つ msD が励起される. msD の増加に伴い,第 1 式か
ら msC の発生が大きく抑制され,第 2 式の msC に関する項が消滅する.ここに, 0,P >
10, 0msL e> > である.結局,実験で見たように,グラスの飲み口を円周方向に擦ると,乾性
摩擦のために指の位置がゆっくりと円周方向に移動しながら,半径方向の振動の節に,円周
方向の振動の腹に,軸方向の振動の腹になる反対称モードが出現し,鳴きが生じる.
付録 2.2 静止円板の摩擦振動解析
Mindlin は式(2.7)の自由振動解を求めた(3).今,円板の固有円振動数を klω (k:節直径数,l:節円数, , 0,1, ,k l = ∞ ),それに対応した , ,j j j
r wθψ ψ の固有関数を各々 , ,, ,j j jr kl kl klwθψ ψ と置くと,
0θ = に対して対称のモードは次式で表せる. , ,( , ) ( )cosj j
r kl r klr r kψ θ ψ θ= ························································································· (A2.2.1a)
, ,( , ) ( )sinj jkl klr r kθ θψ θ ψ θ= ························································································· (A2.2.1b) ( , ) ( )cosj j
kl klw r w r kθ θ= ···························································································· (A2.2.1c) 式(A2.2.1)で,cos を sin に,sin を cos− に置き換えると,反対称モードが得られる.すなわち, , ,( , ) ( )sinj j
r kl r klr r kψ θ ψ θ= ························································································· (A2.2.2a)
, ,( , ) ( )cosj jkl klr r kθ θψ θ ψ θ= − ······················································································ (A2.2.2b) ( , ) ( )sinj j
kl klw r w r kθ θ= ····························································································· (A2.2.2c)
ここに, , ( )jr kl rψ などは,6 個または 4 個の積分定数と Bessel 関数を含む複雑な関数である(3).
式(2.7)の解を対称モードと反対称モードの重ね合わせとして,次式のように仮定する.
, ( cos sin )j jr r ms ms msms
C m D mψ ψ θ θ= +∑ ································································· (A2.2.3a)
, ( sin cos )j jms ms msms
C m D mθ θψ ψ θ θ= −∑ ································································· (A2.2.3b)
( cos sin )j jms ms msms
w w C m D mθ θ= +∑ ····································································· (A2.2.3c)
ここに,記号 msΣ は添え字 , 0,1, ,m s = ∞に対する二重総和, ,ms msC D は未定の時間関数であ
る.このように,円板の 2 点にせん断力 1 2,P P が同時に作用する場合には,解を対称モードと
反対称モードの線形和として求めなければ,発生する振動を正確に表現することはできない. 式(A2.2.3)を式(2.7)に代入し,式(2.7a)~(2.7c)に各々式(A2.2.1a)~(A2.2.1c)をかけて加え合わせ,
また,式(2.7a)~(2.7c)に各々式(A2.2.2a)~(A2.2.2c)をかけて加え合わせた後,円板全体にわたって
積分する.式(2.8)の関係および ( , ) ( , )m s k l≠ に対する次の直交条件:
1
32
, , , ,01
{ } 012
j
j
N r jj j j j j jr ms r kl ms kl j ms klr
j
hh w w rdrd
π
θ θψ ψ ψ ψ θ−=
⎡ ⎤+ + =⎢ ⎥
⎢ ⎥⎣ ⎦∑∫ ∫ ······································ (A2.2.4)
および固有円振動数と固有関数の関係(3)(4)を用いて整理すると,次式を得る.
2
21 22 5
cos cos( )2sin sin
Nms ms
ms ms msms
C m mw Rd d P PDdt dt R m m
θ θζ ω ω
ρ θ θ
⎧ ⎫⎡ ⎤ ⎡ ⎤⎧ ⎫⎡ ⎤ ⎪ ⎪+ + = +⎨ ⎬ ⎨ ⎬⎢ ⎥ ⎢ ⎥⎢ ⎥ −⎪ ⎪⎣ ⎦⎩ ⎭ ⎣ ⎦ ⎣ ⎦⎩ ⎭ ·················· (A2.2.5)
ただし, ( , )m s モードの固有関数に含まれる積分定数は次式を満たすように定めている.
1
3 52 2 2
, ,1 0
{( ) ( ) } ( )12 (1 )
j
j
N r jj j jr ms ms j msr
j m
h Rh w rdrθψ ψπ δ−=
⎡ ⎤+ + =⎢ ⎥
+⎢ ⎥⎣ ⎦∑∫ ······································ (A2.2.6)
ここに, 0mδ は Kronecker のデルタである.軸対称モード ( 0)m = に対しては, 0 0mδ = となり,
また, , 0jmsθψ ≡ である.

97
また,円板の微小な減衰を表すために,各モード間に連成しない粘性減衰( msζ :モード減
衰比)を仮定し,式(A2.2.5)の左辺には,その項を追加している. 式(A2.2.5)中の 1 2,P P を次式で置き換える. ( )i i i iP P f v= ⋅ ··············································································· (A2.2.7)
ここに, ( )i if v は点 i ( 1, 2i = )の摩擦係数, iP は半径方向荷重, iv は相対すべり速度 i iV w= − ,
iV は摩擦棒の掃引速度および 1 2( , , ), ( , , )N Nw w R t w w R tθ θ= − = である. 式(A2.2.5)の振動中心 0 0,ms msC D は次式となる. 0 2 0 2
2 2 2 1 1 1 2 2 2 1 1 1{ ( ) ( )}/ , { ( ) ( )}/ms ms ms ms ms msC P f V P f V D P f V P f Vα ω β ω= + = −
ここに, 5 5
( )cos ( )sin,N Nms ms
ms msw R m w R m
R Rθ θ
α βρ ρ
= = .
よって,次の座標移動を行うと, 0 0,ms ms ms ms ms msC C c D D d= + = + ····································································· (A2.2.8)
振動の変動成分 ,ms msc d に関する次の基礎式を得る.
2
2 2 1 1
22 2 1 1
2 ( )
2 ( )ms ms ms ms ms ms ms
ms ms ms ms ms ms ms
c c c P F PF
d d d P F PF
ζ ω ω α
ζ ω ω β
⎫+ + = + ⎪⎬
+ + = − ⎪⎭ ··········································· (A2.2.9)
ここに, ( ) ( ), 1,2i i i i iF f v f V i= − = . 摩擦力の方向と円板の振動方向が一致した自励振動を想定しているので,その摩擦特性は
相対すべり速度に対して負の勾配を有する乾性摩擦と見なす.この摩擦特性を次の相対すべ
り速度の三次多項式で近似しよう. 3
1 2 3( ) i i ii i i if v e v e v e= − + ······················································································· (A2.2.10)
ここに, 1 2 3, ,i i ie e e は点 ( 1, 2)i i = に対する摩擦特性を表す適当な正定数である. 式(A2.2.9)の ,ms msc d はともに ( , )m s モードに関する変数だから,それらの振動数は同じであ
り,位相差は 0 かπ であるので, ms ms mstΘ ω ϕ= + と置いて,解を次式のように仮定して,平均
法によって解析してみよう.
cos , sin
cos , sinms ms ms ms ms ms ms
ms ms ms ms ms ms ms
c x c x
d y d y
Θ ω Θ
Θ ω Θ
⎫= = − ⎪⎬
= = − ⎪⎭ ··························································· (A2.2.11)
ここに,振幅 ,ms msx y ,位相 msϕ は時間に関して緩やかに変化する関数である.式(2.17)と式
(A2.2.11)から,平均法を適用すると次式を得る. 2 1
2 1( )ms ms ms ms ms ms ms msa a P H PH Aζ ω α= − − + ≡ ················································· (A2.2.12a) 2 1
2 1( )ms ms ms ms ms ms ms msb b P H PH Bζ ω β= − − − ≡ ················································ (A2.2.12b) 0msϕ = ·················································································· (A2.2.12c)
ここに, ,ms ms ms ms ms msa x b yω ω= = ··································································· (A2.2.13)
( ) ( )( )
( )
' '2 2 2 21 1
' '2 21
' '2 2 22 1 1
( ) cos , ( ) sin
8 3 2 ( 1) 3 2
( 1) 3 3 2 4
4( 3 ) 3 3 2 4
(
N Nms ms ms ms ms ms
i i i ims ms ms kl ms ms klkl kl
i ims ms ms kl ms kl klkl kl
i i ii ms ms ms ms kl ms kl klkl kl
X a w R m Y b w R m
H e X X X e Y Y Y
e X Y Y X X X Y
e e V X e X Y X Y Y X Y
θ θ= =
= + + − +
+ − + +
− − + + +
−
∑ ∑
∑ ∑
∑ ∑2
2 11) 4( 3 )i i ii mse e V Y
⎫⎪⎪⎪⎪⎬⎪⎪⎪⎪− − ⎭
············ (A2.2.14)
さらに, 1,2i = , 'klΣ は ,k m l s≠ ≠ に対する , 0,1, ,k l = ∞ の二重総和記号である.式(A2.2.12c)
から,位相 msϕ は一定であることがわかる.

98
定常解を 0 0,ms msa b と置くと,式(A2.2.12a,b)からそれらは次の非線形連立方程式の解である. 0 0 0 000 00
0 0 0 000 00
( , , , , , ) 0
( , , , , , ) 0ms ms ms
ms ms ms
A a b a b
B a b a b
⎧ =⎪⎨
=⎪⎩ ················································································ (A2.2.15)
式(A2.2.15)の解を Newton-Raphson 法を用いて求める. 0 0,ms msa b からの変分を各々 ,ms msξ η と
すると,式(A2.2.15)の繰り返し計算のための方程式は次のようになる. 00 00 00
00 0000
00
00
ms
ms ms msms msms
ms
∞∞
∞∞
∞∞ ∞∞ ∞∞∞∞ ∞∞∞∞
⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥= −⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦⎣ ⎦
G G G
G G G
G G G
Δ Γ
Δ Γ
Δ Γ
························································· (A2.2.16)
ここに,0 0
0 0
/ /, ,
/ /ms mskl kl ms kl ms
ms ms msms mskl ms kl ms
AA a A bBB a B b
ξη
⎡ ⎤∂ ∂ ∂ ∂ ⎡ ⎤ ⎡ ⎤= = =⎢ ⎥ ⎢ ⎥ ⎢ ⎥∂ ∂ ∂ ∂ ⎣ ⎦ ⎣ ⎦⎣ ⎦
G Δ Γ .
ある初期値 0 0,ms msa b から始め,式(A2.2.16)により解が収束するまで繰り返す.求められた定
常解のうち,式(A2.2.16)の係数行列の固有値の実部がすべて負であれば,その解は安定と判
断できる.定常解 0 0,ms msa b に対応した円板の任意の点での振動変位および速度は,式(A2.2.3c),(A2.2.8),(A2.2.11),(A2.2.13)などを用いて求めることができる.
付録 2.3 回転円板の摩擦振動解析 円板の空間に固定された点 ( , )r θ の変位を次式で表す.
,
,
( cos sin )
( sin cos )
( cos sin )
r r ms ms msms
ms ms msms
ms ms msms
C m D m
C m D m
w w C m D mθ θ
ψ ψ θ θ
ψ ψ θ θ
θ θ
⎫= +⎪⎪= − ⎬⎪
= + ⎪⎭
∑∑
∑ ································································ (A2.3.1)
ここに,m は節直径数 ( 0,1, )= ,s は節円数 ( 0,1, )= ,記号 msΣ は添え字 m, s ( 0,1, , )= ∞ に対
する二重総和を表し, ,ms msC D は ( , )m s モードの未定の時間関数, , ,, ,ms r ms msw θψ ψ はそれぞれ
静止円板の ( , )m s モードの固有角振動数 msω に対する , ,rw θψ ψ の固有関数で,正規化条件を
満たす半径方向座標 r の関数である(5). 式(A2.3.27)を式(2.9)に代入し,固有関数の直交条件を用いると,次式を得る(5).
2 2 2
2 2 2
2 2 ( ) ( ) ( )cos
2 2 ( ) ( ) ( )sin
nms ms ms ms ms ms ms ms ms ms n nn
nms ms ms ms ms ms ms ms ms n nn
C m D C m D m C P t m
D m C D m C m D t m
ω ζ ω ω ω ω κ κ θ
ω ζ ω ω ω ω κ θ
⎫+ + + + − = + Γ ⎪⎬
− + − + − = Γ ⎪⎭
∑∑
································· (A2.3.2) ここに, nΣ は 1n = から N までの総和記号であり,
5 5
( ) ( ), nms ms nms ms
w R w rR R
κ κρ ρ
= = ········································································ (A2.3.3)
また,円板のモード減衰比を導入し,(m, s)モードのモード減衰比を msζ と置いている. 摩擦力 P と剛体摩擦棒の押し付け荷重 P の関係および円板と剛体摩擦棒の相対すべり速度
v を次式で表す.
31 2 3
, 0
( ), ( ) ,r R
P P f v f v e v e v e v V wt θ
ωθ = =
∂ ∂⎛ ⎞= ⋅ = − + = − +⎜ ⎟∂ ∂⎝ ⎠ ························· (A2.3.4)

99
ここに, ( )f v は摩擦係数, 1 2 3, ,e e e は正定数,V は剛体摩擦棒の円板軸方向掃引速度である.
微小パラメータε を導入し,回転角速度ω ,モード減衰比 msζ ,摩擦力 P および接触力 ( )n tΓは微小として,ε のオーダと仮定する.そのとき,式(2.10)と式(A2.3.4)を式(A2.3.2)に代入し
て,ε のオーダまで考慮すると,次式を得る.
2
2
[ 2 2 { ( ) ( )}( )cos ( )]
[2 2 ( )sin ( )]
Pms ms ms ms ms ms ms ms
nms n nn
nms ms ms ms ms ms ms ms n nn
c c m d c K f v f Vt m t
d d m c d t m t
ω ε ω ζ ω
κ Γ ω φ
ω ε ω ζ ω κ Γ ω φ
⎫+ = − − + −⎪⎪+ + ⎬⎪
+ = − + + ⎪⎭
∑∑
························· (A2.3.5)
ここに, Pms msK Pκ= ,また, ,ms msc d はおのおの次式を満たす ,ms msC D の変動成分である.
0 0
0 2 0
,( ) / , 0
ms ms ms ms ms msP
ms ms ms ms
C C c D D dC K f V Dε ω
= + = + ⎫⎪⎬
= = ⎪⎭ ································································ (A2.3.6)
式(A2.3.5)には,高い振動数 msω の成分と低い振動数mω の成分が共存している.したがっ
て,ここでは,そのような系に非常に有効な多重尺度法を適用して,式(2.10)と式(A2.3.5)の 1次近似解を求める.以下,1 次近似解に必要な式のみを記述する. まず,独立変数を ( 0, 1)i
iT t iε= = と置くと,
2
20 1 0 0 12
, 2d dD D D D Ddt dt
ε ε= + = + ······························································ (A2.3.7)
を得る.ここに, 0 10 1
,D DT T∂ ∂
= =∂ ∂
である.また,式(A2.3.5)の解を次のように置く.
1 20 1 0 1
1 20 1 0 1
1 20 1 0 1
( , ) ( , ) ( , )( , ) ( , ) ( , )
( , ) ( , ) ( , )
ms ms ms
ms ms ms
n n n
c t c T T c T Td t d T T d T Tu t u T T u T T
ε εε ε
ε ε
= + ⎫⎪
= + ⎬⎪= + ⎭
······························································· (A2.3.8)
式(A2.3.8)を式(2.10)と式(A2.3.5)に代入し,ε の係数を比較する.まず, 0ε の係数比較から,
2 1 2 10
2 1 2 10
2 1 1 2 1 2 1 1 1 10 0
1 1 1 10 0
00
2 ( ){ ( cos sin )
2 ( cos sin )}
ms ms ms
ms ms ms
n n n n n n kl n n kl n kl nkl
n n kl n kl n
D c cD d dD u D u u w r c k d k
D c k D d k
ωω
ζ ω ω ω θ θ
ζ ω θ θ
+ =
+ =
+ + = +
+ +∑
··················· (A2.3.9)
次に, 1ε の係数の比較から,
2 2 2 2 1 1 10 0 1 0 0
2 1 1 21 0 0
1 3 10 2 0
2 1 1 1 1 1
2 2 2[ 3 ( ) 3 { ( ) }
{ ( ) } ] ( )
[ { ( )( cos sin )}
2
ms ms ms ms ms ms ms ms
Pms kl kl kl klkl kl
Pkl kl ms kl klkl kl
nms n n n kl n kl n kl nn kl
n
D c c D D c D c m D dK e V w R D c V w R D c
w R D c K e w R D c
m u w r c k d k
ω ζ ω ω
κ ω θ θ
ζ
+ = − − −
+ − +
− +
+ − +
+
∑ ∑∑ ∑∑ ∑
1 1 1 1 1 10 0 0{ ( )( cos sin )}]cosn n kl n kl n kl n nkl
D u w r D c k D d k mω θ θ θ− +∑
······ (A2.3.10a)
2 2 2 2 1 1 10 0 1 0 0
2 1 1 1 1 1
1 1 1 1 1 10 0 0
2 2 2[ { ( )( cos sin )}
2 { ( )( cos sin )}]sin
ms ms ms ms ms ms ms ms
nms n n n kl n kl n kl nn kl
n n n kl n kl n kl n nkl
D d d D D d D d m D cm u w r c k d k
D u w r D c k D d k m
ω ζ ω ω
κ ω θ θ
ζ ω θ θ θ
+ = − − +
+ − +
+ − +
∑ ∑∑
·· (A2.3.10b)
2 2 2 2 2 2 2 1 2 10 0
1 1 2 1 1 2 1 11 1 0 1 0 0 1
2 ( )( cos sin )
2 [ ( ){( )cos ( )sin }] 2n n n n n n n kl n kl n kl nkl
n n n kl n kl kl n kl kl n nkl
D u D u u w r c k d k
D u w r D c D c k D d D d k D D u
ζ ω ω ω θ θ
ζ ω θ θ
+ + = +
− − + + + −
∑∑
····························· (A2.3.10c) ここに, 1
1n nTθ ω φ= + .

100
まず,式(A2.3.9)の解は次式となる. 1 1
1 0 1 0
11 0
2 2 2 2 2 31 1
1 2 2 2 2 2 2
( )exp( ) , ( )exp( )( )exp( )
( 4 ) 2( ) ( )( cos sin )( ) 4
ms ms ms ms ms ms
nn kl klkl
n n n n kl kl n n klkl kl n kl n kl n
n kl n n kl
c A T j T cc d B T j T ccu U T j T cc
jU T w r A k B k
ω ω
ω
ω ω ζ ω ω ζ ω ω θ θω ω ζ ω ω
= + = +
= +
+ − −= × +
− +
∑ ······ (A2.3.11)
ここに,cc は前項の共役複素数を表し, 1j = − .式(A2.3.11)を式(A2.3.10a,b)の右辺に代入し,
永年項を消去すると次式を得る. 2 2
1 1 2
'2 2 2 21
2 1 1
2 2 2 (3 ) ( )
3 ( ) [{ ( )} 2 { ( )} ]
[ { ( )( cos sin )}
2 { (
Pms ms ms ms ms ms ms ms ms ms ms
Pms ms ms ms ms ms ms ms kl kl kl klkl
n nms n n ms ms n ms n ms nn
nn n ms ms ms
j D A A m B K eV e w R A
K e w R A w R A A w R A A
m U w r A m B m
j U w r
ω ζ ω ωω ω
ω ω ω
κ ω θ θ
ζ ω ω
− + + + −
+ +
+ − +
+ −
∑∑
1 1 1)( cos sin )}]cos 0n ms n ms n nA m B m mθ θ θ+ =
···· (A2.3.12a)
21
2 1 1
1 1 1
(2 2 2 )[ { ( )( cos sin )}
2 { ( )( cos sin )}]sin 0
ms ms ms ms ms ms ms
n nms n n ms ms n ms n ms nn
nn n ms ms ms n ms n ms n n
j D B B m Am U w r A m B m
j U w r A m B m m
ω ζ ω ωω
κ ω θ θ
ζ ω ω θ θ θ
− + −
+ − +
+ − + =
∑ ····· (A2.3.12b)
ここに, 'klΣ は ( , ) ( , )k l m s≠ に対する , 0,1, ,k l = ∞ の二重総和記号を表し, msA および msB の頭
号“-”はその変数の共役複素数を表す.式(A2.3.12)における ,ms msA B を次のように置く. exp( ) / 2, exp( ) / 2ms ms ms ms ms msA x j B y jα β= = ························································ (A2.3.13)
ここに, , ,ms ms msx y α および msβ は実数である. 式(A2.3.13)を式(A2.3.12)に代入し,実部と虚部をそれぞれ 0 に置くと,振幅と位相に関す
る次の連立常微分方程式を得る. 2
2 1
'2 2 11
1 1
cos {( 3 )
3 ( 2 ) / 4}/ 2 sin sin 2 / 4
{ (1 cos2 ) sin 2 cos }/ 4
Pms ms ms ms ms ms ms ms
n nms ms kl ms ms ms ms ms nkl n
n nms ms ms ms n ms n msn
a a m b K e e V X
e X X X b K Y m
K Z a m b m
ζ ω ω Θ
ω Θ θ
ω θ θ Θ
′ = − − + −
− + −
− + +
∑ ∑∑
········ (A2.3.14a)
1
1 1
cos sin sin 2 / 4
{ sin 2 cos (1 cos 2 )}/ 4
n nms ms ms ms ms ms ms ms ms ms ms nn
n nms ms ms ms n ms ms nn
b b m a a K Y m
K Z a m b m
ζ ω ω Θ ω Θ θ
ω θ Θ θ
′ = − + +
− + −
∑∑
·············· (A2.3.14b)
1
1
1
( / / )( sin cos sin 2 / 4)
cos2 / 2
( / / ) sin sin 2 / 4
n nms ms ms ms ms ms ms ms ms ms nn
n nms ms ms nn
n nms ms ms ms ms ms ms ms nn
b a a b m K Y m
K Y m
b a a b K Z m
Θ ω Θ ω Θ θ
ω θ
ω Θ θ
′ = − −
−
+ +
∑∑
∑ ··········· (A2.3.14c)
ここに, ms ms msΘ α β= − ,“’”は 1T に関する導関数で, 2 5
2 2 2 3
2 2 2 2 2 2 2 2
, , { ( )} / , ( ){1 ( ) 4 ( ) } 2 ( ),
{1 ( ) } 4 ( ) {1 ( ) } 4 ( )
nms ms ms ms ms ms ms ms n ms ms ms
n n nn nn ms n ms n n ms
ms msn n n nms n ms ms n ms
a x b y K w r R X w R am mY Z
ω ω ρΩ ζ Ω ζ Ω
Ω ζ Ω Ω ζ Ω
= = = =
− += =
− + − +
····················· (A2.3.15)
および /nms ms nΩ ω ω= , ,ms msa b はおのおの ,ms msc d の速度振幅を表す.
動吸振器による円板の不均一性のために,式(A2.3.14)には 11sin 2 sin 2 ( )n nm m Tφ ω φ= + ,
11cos2 cos2 ( )n nm m Tφ ω φ= + という周期変動項が現れ,式(A2.3.14)は周期的変動を伴う周期解を
持つ.この周期解の解法に RKG 法および Newton-Raphson 法を併用し,効率よく周期解のみ
を抽出する計算法であるシューティング法(12)を適用する. まず,表 2.2 の 5 つのモードを考慮して連立常微分方程式(A2.3.2)および式(A2.3.14)を直接
数値積分した結果,用いたパラメータ値では,自励振動は(2,0)および(3,0)モードの単一モー

101
ドのみが発生可能であることが判明した.そのとき,発生しないモードの振幅は 0 となるの
で,式(A2.3.14c)にように,従属変数の分数式が現れている場合,シューティング法などヤコ
ビアン行列を必要とする手法では不都合を生じる.よって,次のようにして式(A2.3.14)の周
期解を求め,その安定判別を行う. (i) 式(A2.3.14)の(m, s)単一モードのみにシューティング法を適用し,周期 / mπ ω をもつ周
期解を求める. (ii) 周期解の安定性は,すべてのモードを考慮して判別する.上記(i)で得られた周期解に対
する初期条件と,その他すべての(k, l)モードに対する ,kl kla b および klΘ に微小な変分を加
えた値を初期値とし,式(A2.3.14)を数十周期にわたって数値積分する. (iii) その数値積分の結果,(m, s)モードに関する値が上記(i)で得られた解の極近傍に留まり,
かつ,他の(k, l)モードの成分がすべて 0 に漸近するようであれば,上記(i)で得られた(m, s)単一モードの周期解は安定,さもなければ不安定と判別する.
(iv) 上記(i)~(iii)で得られた式(A2.3.14)の周期解を式(A2.3.11),(A2.3.6)および式(A2.3.1)に代入すると,静止座標系から見た動吸振器のある円板の自励振動波形が求められる.結
果としてそれはうなりを呈する.
第 2章の文献
(1) 日本機械学会編,機械工学便覧基礎編 α2,機械力学, (2004), pp.70-78, 丸善. (2) 末岡淳男・吉武裕・田村英之・堀田邦彦, 外周上の 2点に摩擦が作用する円板の自励振動(第 1報, 内
部共振のない場合), 機論, 52-473, C(1986), pp.16-23. (3) Mindlin, R. D. and Deresiewicz, H., Thickness-shear and flexural vibrations of a circular disk, J. Appl.
Phys., 25-(10), (1954), pp.1329-1332. (4) 松久寛・佐藤進・吉田豊 , 歯車本体の屈曲振動と騒音に関する研究 , 機論,48-426, C(1982),
pp.196-204. (5) 末岡淳男・吉武裕・田村英之・堀田邦彦, 外周上の 2点に摩擦が作用する円板の自励振動(第 2報, 内
部共振のある場合), 機論, 52-473, C(1986), pp.24-31. (6) 末岡淳男・吉武裕・田村英之,回転円板の自励振動(第 3 報,内部共振のない円板の不均一性の影
響),機論, 55-514, C(1989), pp.1330-1335. (7) 吉武裕・末岡淳男,不均一性をもつ回転円板の摩擦振動(内部共振のある場合), 機論, 57-533,
C(1991), pp.42-47. (8) 原田宏・岡村廣正・西脇正明,ブレーキノイズに関する研究(第 2 報, ディスクブレーキ鳴きの場
合), 機論, 55-512, C(1989), pp.932-939. (9) Nayfeh, A. H. and Mook, D. T., Nonliear Oscillations, (1979), pp.56-61, John Wiley & Sons.
(10) 末岡淳男・吉武裕・劉孝宏・綾部隆・田村英之, 回転円板の自励振動(第 1 報, 内部共振のない場合), 機論, 53-485, C(1987), pp.21-26.
(11) 末岡淳男・劉孝宏・藤山征人・吉武裕,回転円板の動吸振器による摩擦振動の制振, 機論, 59-561, C(1993), pp.1335-1342.
(12) 井上順吉・末岡淳男, 機械力学 II―非線形振動論―, (2002), pp.145-158, 理工学社. (13) 井上光弘,自動車用摩擦材に関する研究(第 1 報,ディスクブレーキ用パッドの鳴き), 機論, 51-466,
C(1985), pp.1433-1439. (14) 西脇正明, ブレーキの鳴き, 自動車技術, 43-12, (1989), pp.88-97. (15) 西脇正明・合谷守明, ブレーキノイズに関する研究(第 3 報,ディスクブレーキグローン音の場合),
機論, 56-527, C(1990), pp.1769-1776. (16) Fieldhouse, J.D., Newcomb, P., The Application of Holo-graphic Interferometry to the Study of Disk Brake

102
Noise, SAE Paper, 930805, (1993), pp.133-147. (17) 武田信之・神谷重徳・中川謙・吉川英夫, 非対称ブレーキシューを用いたブレーキノイズ低減の研
究(ドラム,シューおよびライニングの連成振動特性の利用), 機論, 63-606, C(1997), pp.394-401. (18) Takahiro RYU, Atsuo SUEOKA, Yutaka NAKANO, Takumi INOUE, Experimental Investigation on
Squeal and Chatter Phenomena in Bicycle Disk Brakes (Part 1, Regeneration Experiments of Squeal and Chatter and Their Characteristics), Proc. of the Asia-Pacific Vibration Conference 2003, Vol.2, pp.579-584, November, 2003.
(19) 末岡淳男・劉孝宏・白水健次, 自動車用フローティング型ディスクブレーキの鳴き(第 2 報, 解析結
果), 機論, 67-658, C(2001), pp.1727-1734. (20) 大矢多喜雄・大木隆・服部四士主,自転車用キャリパブレーキの鳴きに関する研究 I, II, III, 自転車
の安全性,操縦性の研究,自転車技術情報,9(1980), pp.32-36, 15,(1982), pp.37-43. 20,(1983), pp.21-24. (21) 大矢多喜雄・山田耕太郎,自転車用バンドブレーキノイズの研究,機講論, No.95-1,(1995), pp.398-399. (22) 林博明,ブレーキのトライボロジー 自転車のブレーキ,トライボロジスト, 41-4, (1996), pp.305-
310. (23) 劉孝宏・末岡淳男・白水健次・江村篤裕・中野寛, 自転車用ディスクブレーキの鳴き・ビビリ現象に
関する実験的研究(第 1 報,鳴きおよびビビリの再現実験とその特性), 機論, 70-689, C(2004), pp.30-37.
(24) 末岡淳男・劉孝宏・白水健次・江村篤裕・中野寛, 自転車用ディスクブレーキの鳴き・ビビリ現象に
関する実験的研究(第 2 報,鳴きおよびビビリの発生メカニズムとその対策), 機論, 70-689, C(2004), pp.38-45.
(25) 中江貴志・末岡淳男・劉孝宏,自転車用ディスクブレーキに発生する鳴き現象の解析的研究,機論,
77-774, C(2010), pp.481-492. Takashi NAKAE, Atsuo SUEOKA, Takahiro RYU, Analytical Investigation on Squeal Phenomena Generat- ed in Bicycle Disc Brakes, Journal of System Design and Dynamics, 4-2, (2010), pp.379-390.
(26) 中江貴志・劉孝宏・末岡淳男,自転車用ディスクブレーキに発生するビビリ現象の非線形振動解析,
機論,77-774, C(2010), pp.493-504. Takashi NAKAE, Takahiro RYU, Atsuo SUEOKA, Nonlinear Analysis of Chatter Phenomena Generated in a Bicycle Disc Brake, Journal of System Design and Dynamics, 4-4(2010), pp.632-645.
(27) 中野寛・末岡淳男・劉孝宏・家藤英世・折居利昭・中江貴志,自転車用ディスクブレーキの鳴きの対策
と解析, 機論, 72-720, C(2006), pp.2373-2381. (28) 田上良蔵,子供と遊ぶ,お父さんのおもちゃ箱, (1991), pp.52-53 , (株)山海堂. (29) 大賀弘章,伝承おもちゃをつくる, (1985), pp.82-83, 大月書店. (30) 戸田盛和,おもちゃセミナー, (1979), pp.46-52, 日本評論社. (31) 桜井明・井上喜雄・筒井秀美・伊藤廣,しゅう動部摩擦を介した非対称連成力による自励振動に関す
る研究, 機論, 60-570, C(1994), pp.380-385. (32) 末岡淳男・劉孝宏・中野寛・山崎俊広・中江貴志・川原大輔, 動吸振器を用いた自動車用ディスクブ
レーキの鳴き抑制対策, 機論, 73-734, C(2007), pp.2653-2661. (33) 中野寛・劉孝宏・末岡淳男 , 自動車用対向型ディスクブレーキの鳴き , 機論 , 70-700, C(2004),
pp.3398-3405. (34) Timoshenko, S. P. and Goodier, J. N., Theory of Elasticity, (1951), pp.372-379, McGraw-Hill. (35) Mindlin, R. D., Compliance of Elastic Bodies in Contact, J. Appl. Mech., 16 (1949), pp.259-268. (36) Ollerton, E., Adhesion: a convention arranged by the Railway Engineering Group, London, 27th and 28th
November, 1963, Paper 10. (37) 谷口修監修,振動工学ハンドブック, (1976), pp.1160-1167, 養賢堂. (38) Carter, F. C., On the action of a locomotive driving wheel, Proc. Roy. Soc., A112(1926), pp.151-157. (39) Johnson, K. L., The effect of a tangential contact force upon the rolling motion of an elastic sphere upon a
plane, K. Appl. Mech., 15(1958), pp.339-346. (40) Johnson, K. L., The effect of spin upon the rolling motion an elastic sphere upon a plane, J. Appl. Mech.,
25(1958), pp.332-338. (41) Johnson, K. L., The influence of elastic deformation upon the motion of a ball rolling between two surfaces,

103
Proc. Inst. Mech. Engrs. 173(1959), pp.795-810. (42) Johnson, K. L., Tangential tractions and microslip in rolling contact, Proc. Symp. Rolling Contact
Phenomena, Ed. J. B. Bidwell, Elsevier(1962), pp.6-28. (43) Vermeulen, P. J. and Johnson, K. L., Contact of non-spherical bodies transmitting tangential force, J. Appl.
Mech., 31(2)(1964), pp.338-340. (44) Kalker, J. J., On the rolling contact of two elastic bodies in the presence of dry friction, Dr. Thesis, Delft
(1967). (45) Kalker, J. J., The tangential force transmitted by two elastic bodies rolling over each other with pure
creepage, Wear 11(1968), pp.421-430. (46) Kalker, J. J., Survey of wheel-rail rolling contact theory, Vehicle System Dynamics, 5(1979), pp.317-358. (47) Illingworth, R., Railing Wheelset Lateral Excitation by Track Irregularities, The Dynamics of Vehicle on
roads and on tracks, Proc. 5th VSD-2nd IUTAM Symp. (1977), pp.450-458. (48) Gilchrist, A. O., The Effect of Surface Condition in Rolling Contact Behaviour, Brit. Rail Res. Dept. Rept.,
Derby (U.K) (1978). (49) 日本機械学会編,機械工学便覧基礎編 α2,機械力学, (2004), pp.181-185, 丸善. (50) 須田義大・井口雅一・今泉博英, コルゲーションの成長・減衰機構の研究:第 3 報, 成長・減衰条件
と理論の検証, 機論, 54-499, C(1988), pp.552-560. (51) 日本地下鉄協会 , 波状摩耗発生メカニズム解析に関する研究調査報告書 , (1996), pp.34-43,
pp.247-256. (52) 末岡淳男・綾部隆・田村英之, 鉄道車両の車輪とレールの連成振動(第1報,レールの方程式と特
性), 機論, 49-440, C(1983), pp.535-542. (53) 綾部隆・末岡淳男・田村英之, 鉄道車両の車輪とレールの連成振動(第 2 報,回転車輪の軸方向定
常振動解析),機論, 51-465, C(1985), pp.1078-1083. (54) 末岡淳男・綾部隆・田村英之・山本範人, 鉄道車両の車輪とレールの連成振動(第 3 報,垂直方向定
常振動解析), 機論, 52-476, C(1986), pp.1265-1271. (55) 末岡淳男・綾部隆・権藤浩・田村英之, 鉄道車両の車輪とレールの連成振動(第 4 報,複数個の車輪
とレールの垂直方向連成振動解析), 機論, 53-485, C(1987), pp.82-87. (56) 綾部隆・末岡淳男・田村英之, 鉄道車両の車輪とレールの連成振動(第 5 報,水平方向定常振動解
析), 機論, 53-489, C(1987), pp.1028-1033. (57) 綾部隆・末岡淳男・田村英之, 鉄道車両の車輪とレールの連成振動(第 6 報,クリープ力を考慮し
た水平方向連成振動特性),機論, 53-491, C(1987), pp.1352-1357. (58) 末岡淳男・綾部隆・川上光徳・田村英之, 鉄道車両の車輪/レールの垂直方向振動解析のための無限
車両近似モデルの提案, 機論, 54-500, C(1988), pp.842-850. (59) 末岡淳男・綾部隆・飯塚義和・田村英之, 鉄道車両の車輪とレールの垂直・水平両方向連成振動解析,
機論, 55-511, C(1989), pp.593-601. (60) 綾部隆・末岡淳男・田村英之, 無限車両近似モデルを用いた鉄道車両の車輪・レール水平方向連成
振動解析, 機論, 55-517, C(1989), pp.2297-2305. (61) 末岡淳男・綾部隆・飯塚義和, 無限車両近似モデルを用いた鉄道車両の車輪とレールの垂直・水平
両方向連成振動解析, 機論, 58-549, C(1992), pp.1335-1342. (62) Den Hartog(谷口修・藤井澄二訳), 機械振動論, (1960), pp.367-373, コロナ社. (63) 安田仁彦, 振動工学(応用編), (2001), pp.85-87, コロナ社. (64) 鈴木勝義・山田元・成田吉弘・斎藤俊,シェルの振動入門,(1996), pp.57-80, コロナ社. (65) 日本機械学会編,機械工学便覧基礎編 α2,機械力学, (2004), pp.106-107, 丸善. (66) Stefan Markus, The Mechanics of Vibrations of Cylindrical Shells, (1988), pp.102-119, Elsevier.