Embed Size (px)
Citation preview

1
基于摩擦和扰动补偿的永磁同步电机 伺服系统控制方法研究
作者:周旋 李世华
2
PMSM伺服系统控制器设计 4
摩擦和扰动对伺服系统的影响 1
摩擦的数学模型 2
摩擦模型参数辨识 3
小结 5
主要内容
3
一、摩擦和扰动对伺服系统的影响
摩擦是一种难以避免的、复杂的物理现象,它的存
在主要给伺服系统带来了以下几个方面的影响:
使双向运行的伺服系统产生不连续运动,从而引起振动; 1
使低速运行的伺服系统产生爬行现象; 2
使高速运行产生较大的跟随误差,降低了跟踪精度; 3 3
使系统在位置伺服方式时产生死区或极限环。 4 4

4
位置给定正弦信号的跟踪曲线
0 0.5 1 1.5 2-0.4
-0.2
0
0.2
0.4
time/s
位置
/rad
( a)位置跟踪曲线
0.25 0.3 0.35 0.4 0.450.17
0.18
0.19
0.2
0.21
0.22
0.23
time/s位置
/rad
( b)局部放大图
无前馈补偿位置曲线给定位置曲线
无前馈补偿位置曲线给定位置曲线
0 0.5 1 1.5 2-0.4
-0.2
0
0.2
0.4
time/s
位置
/rad
( a)位置跟踪曲线
0.25 0.3 0.35 0.4 0.450.17
0.18
0.19
0.2
0.21
0.22
0.23
time/s
位置
/rad
( b)局部放大图
无前馈补偿位置曲线给定位置曲线
无前馈补偿位置曲线给定位置曲线
5
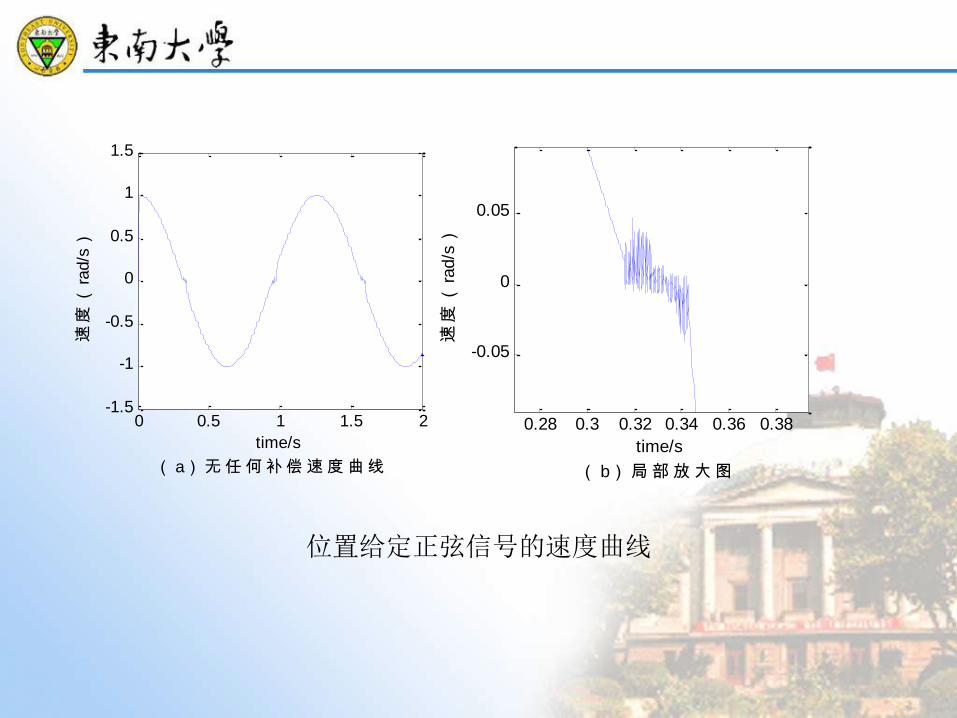
位置给定正弦信号的速度曲线
0 0.5 1 1.5 2-1.5
-1
-0.5
0
0.5
1
1.5
time/s
速度(
rad/
s)
( a)无任何补偿速度曲线
0.28 0.3 0.32 0.34 0.36 0.38
-0.05
0
0.05
time/s速度(
rad/
s)( b)局部放大图
0 0.5 1 1.5 2-1.5
-1
-0.5
0
0.5
1
1.5
time/s
速度(
rad/
s)
( a)无任何补偿速度曲线
0.28 0.3 0.32 0.34 0.36 0.38
-0.05
0
0.05
time/s速度(
rad/
s)( b)局部放大图
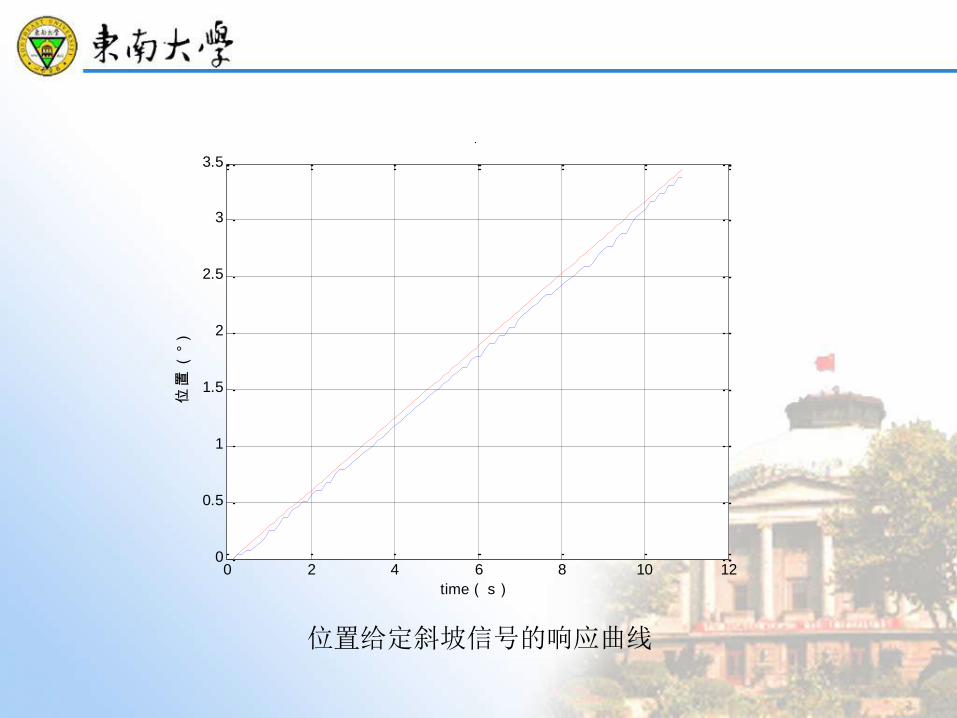
6 位置给定斜坡信号的响应曲线
0 2 4 6 8 10 120
0.5
1
1.5
2
2.5
3
3.5
time( s)
位置(
°)
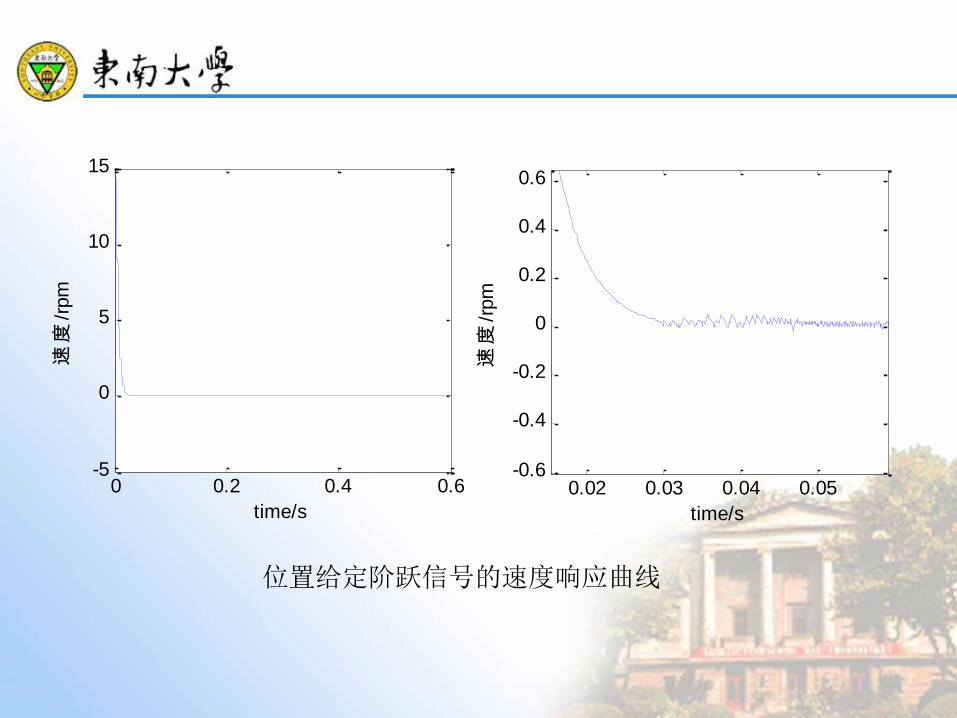
7
0.02 0.03 0.04 0.05-0.6
-0.4
-0.2
0
0.2
0.4
0.6
time/s速度
/rpm
0 0.2 0.4 0.6-5
0
5
10
15
time/s
速度
/rpm
位置给定阶跃信号的速度响应曲线
8
影响伺服控制系统精度的另外一个重要因素就是系统扰动。扰动往往来源于建模过程中忽略的不确定因素、系统运行过程中负载突变以及工作环境变化等。这些因素的存在使得闭环系统性能变差甚至不稳定,而实际工程中,扰动往往是不可避免的,并且扰动的形式复杂,其精确模型很难得到。
为此,近年来不少学者研究了基于扰动观测补偿的复合控制策略,如基于扰动观测器的方法和自抗扰技术。扰动观测器和自抗扰控制方法中的扩张状态观测器都可以用来观测系统在运行过程中存在
的扰动。
9
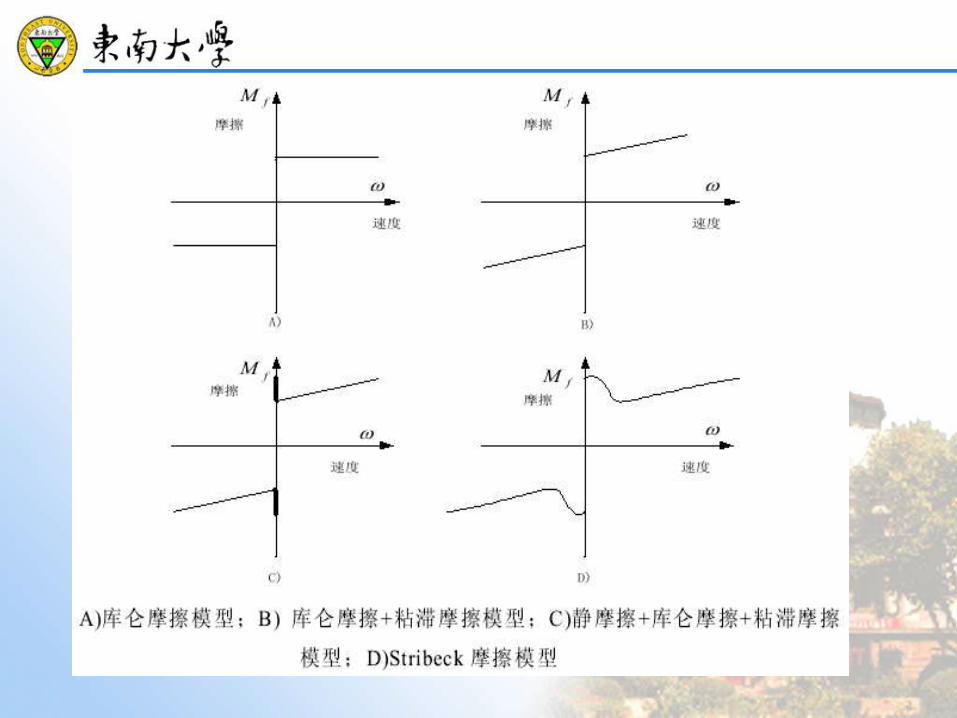
二、摩擦的数学模型
目前在工程中常用的静态摩擦模型从简单到复杂有: • 图A)所示的库仑摩擦模型; • 图B)所示的库仑摩擦+粘滞摩擦模型; • 图C)所示的静摩擦+库仑摩擦+粘滞摩擦模型; • 图D)所示的静摩擦+库仑摩擦+粘滞摩擦+滑动粘附现象的摩擦模型,称为Stribeck摩擦模型。
图中的 是摩擦力矩,ω为转动速度。
fM
10
11
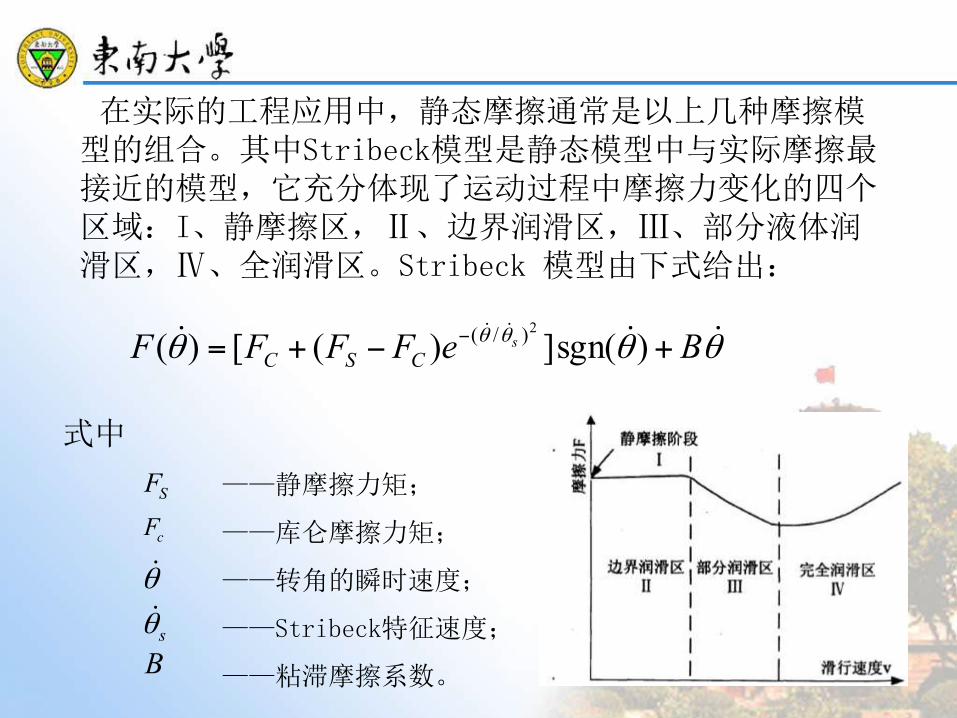
在实际的工程应用中,静态摩擦通常是以上几种摩擦模型的组合。其中Stribeck模型是静态模型中与实际摩擦最接近的模型,它充分体现了运动过程中摩擦力变化的四个区域:I、静摩擦区,Ⅱ、边界润滑区,Ⅲ、部分液体润滑区,Ⅳ、全润滑区。Stribeck 模型由下式给出:
θθθ θθ BeFFFF sCSC +−+= − )sgn(])([)(
2)/(
SF
式中
——静摩擦力矩;
——库仑摩擦力矩;
——转角的瞬时速度;
——Stribeck特征速度;
——粘滞摩擦系数。
cF
θ
sθ
B
12
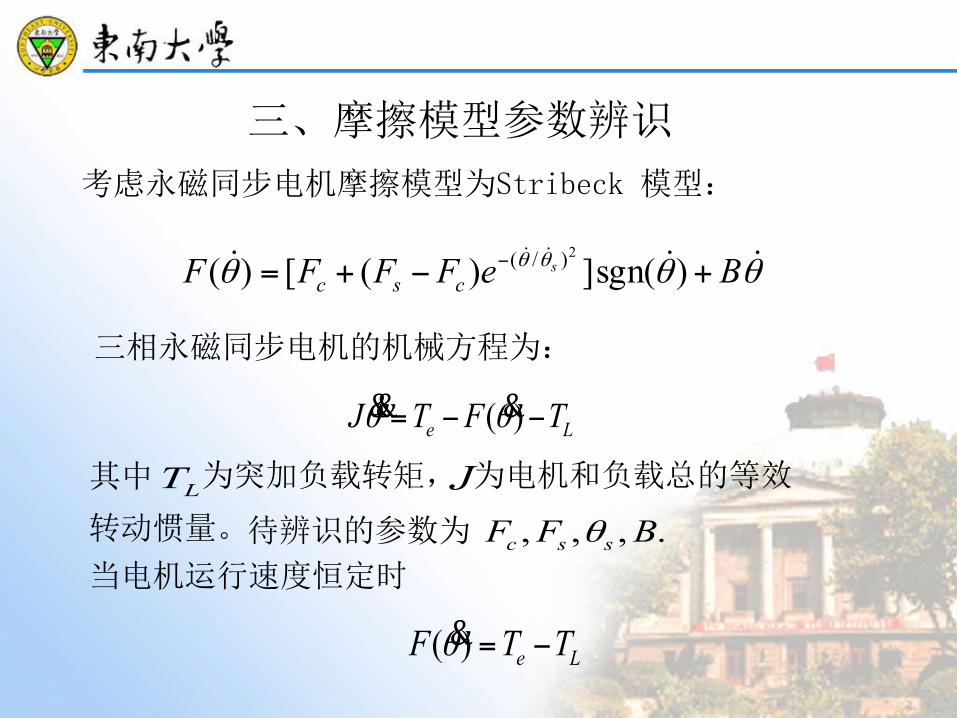
当电机运行速度恒定时
考虑永磁同步电机摩擦模型为Stribeck 模型:
待辨识的参数为
θθθ θθ BeFFFF scsc +−+= − )sgn(])([)(
2)/(
三相永磁同步电机的机械方程为:
其中 为突加负载转矩, 为电机和负载总的等效
( )e LJ T F Tθ θ= − −&& &
LT J, , , .c s sF F Bθ
( ) e LF T Tθ = −&
转动惯量。
三、摩擦模型参数辨识
13
nii 1}{ =θ
1{ }nei iT =
niiF 1)}({ =θ
Tssc BFFx ]ˆ,ˆ,ˆ,ˆ[ θ=
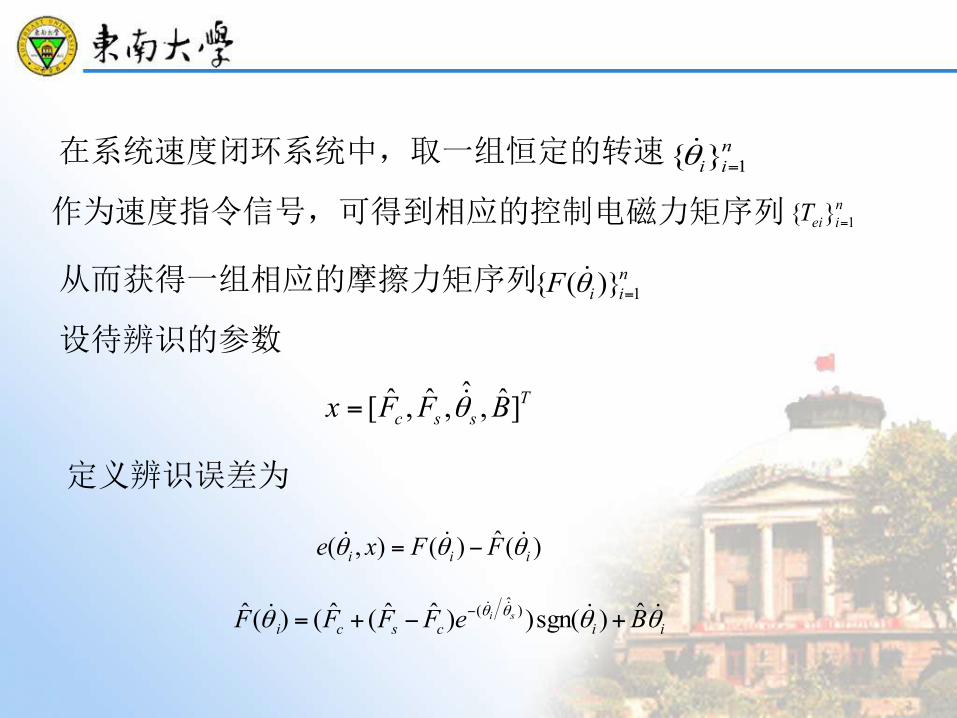
在系统速度闭环系统中,取一组恒定的转速
作为速度指令信号,可得到相应的控制电磁力矩序列
从而获得一组相应的摩擦力矩序列
设待辨识的参数
定义辨识误差为
)(ˆ)(),( iii FFxe θθθ −=
iicsci BeFFFF si θθθ θθ ˆ)sgn())ˆˆ(ˆ()(ˆ )ˆ( +−+= −
14
∑=
=n
ii xel
1
2 ),(21
θ
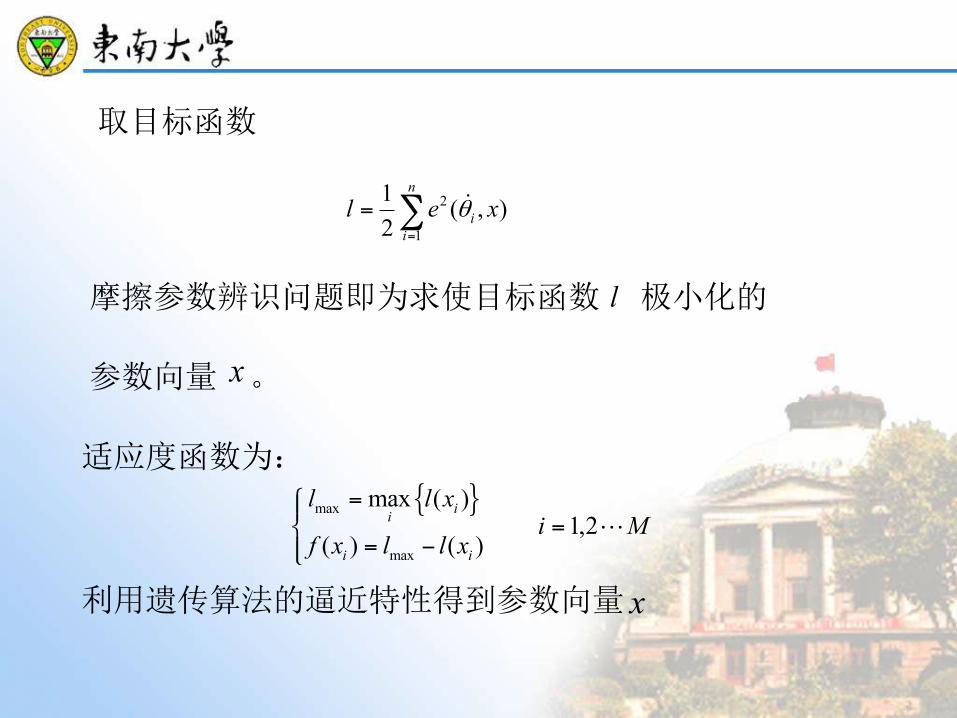
l
x
取目标函数
摩擦参数辨识问题即为求使目标函数 极小化的
参数向量 。
{ }max
max
max ( )
( ) ( )ii
i i
l l x
f x l l x
=⎧⎪⎨
= −⎪⎩Mi 2,1=
利用遗传算法的逼近特性得到参数向量
适应度函数为:
x
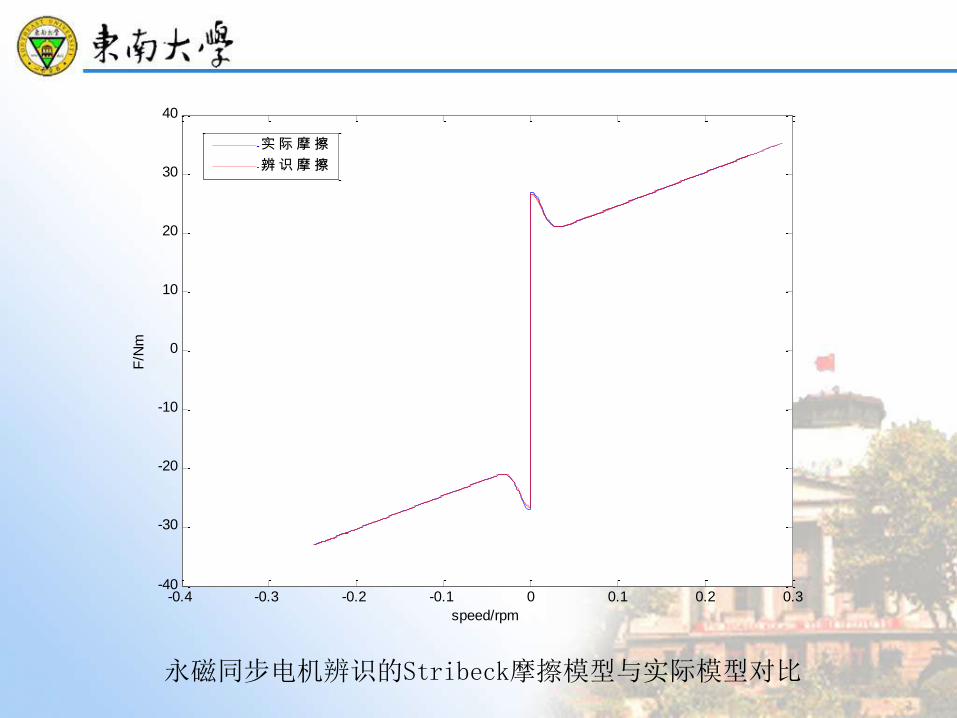
15 永磁同步电机辨识的Stribeck摩擦模型与实际模型对比 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3
-40
-30
-20
-10
0
10
20
30
40
speed/rpm
F/Nm
实际摩擦辨识摩擦
16
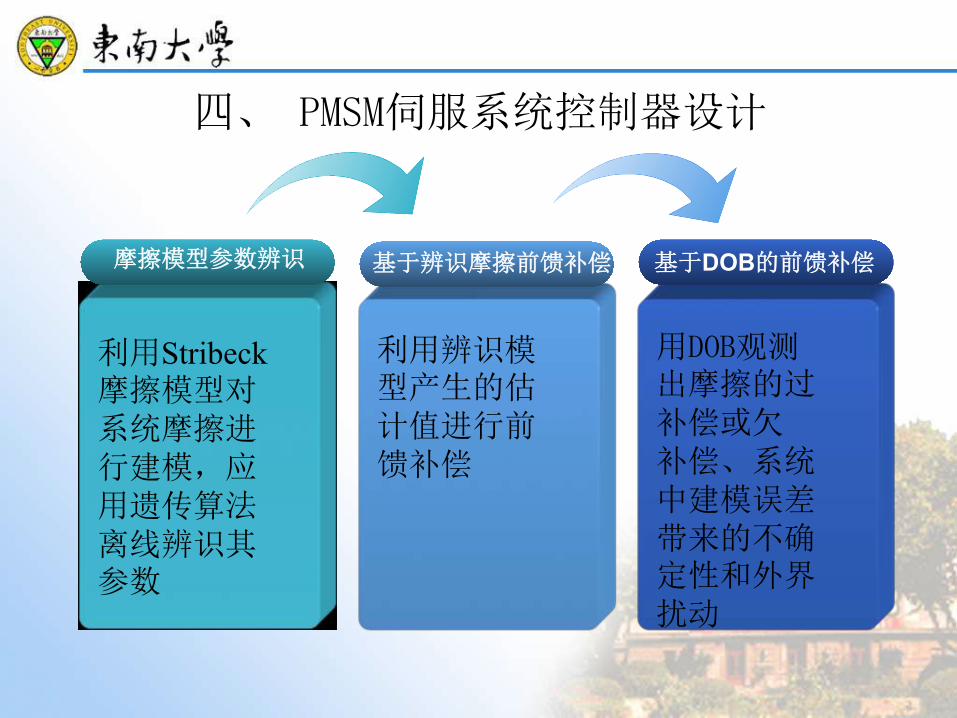
四、 PMSM伺服系统控制器设计
摩擦模型参数辨识
利用Stribeck摩擦模型对系统摩擦进行建模,应用遗传算法离线辨识其参数
利用辨识模型产生的估计值进行前馈补偿
用DOB观测出摩擦的过补偿或欠补偿、系统中建模误差带来的不确定性和外界扰动
基于辨识摩擦前馈补偿 基于DOB的前馈补偿
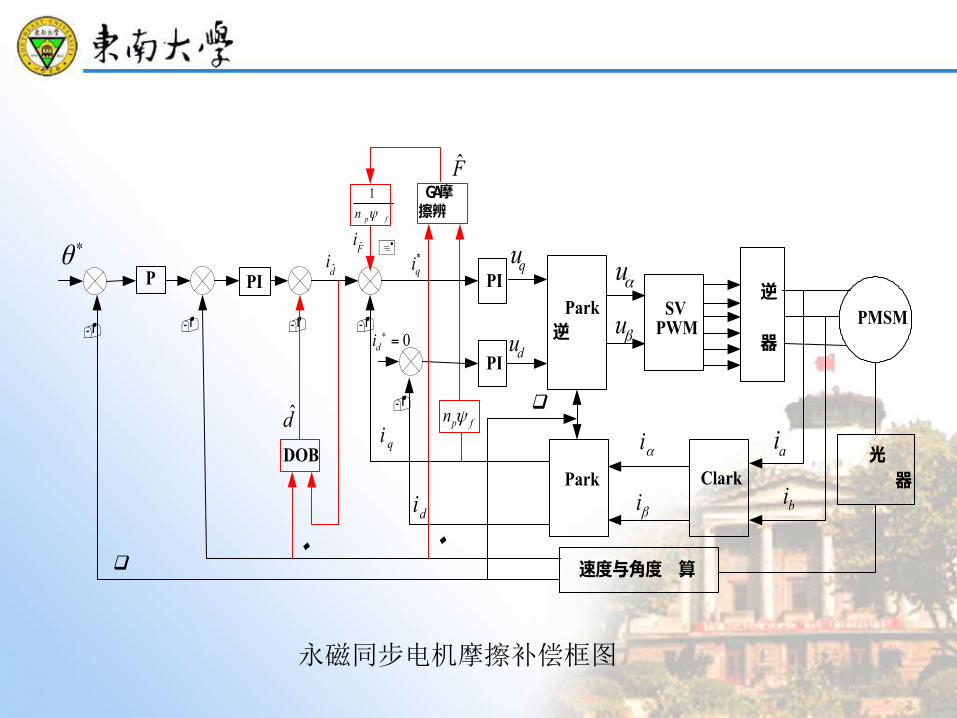
17 永磁同步电机摩擦补偿框图
PIPark逆
SVPWM
逆
器PMSM
光器
速度与⾓角度 算
ClarkPark
-
-
w
q
--
q
GA摩擦辨
+
PId̂iθ ∗
0di∗ =
F̂
-
d̂
P
di
qi iα
iβ
ai
bi
qu
duuβ
uα
DOB
1
p fn ψ
w
p fn ψ
PI
F̂i*qi
18
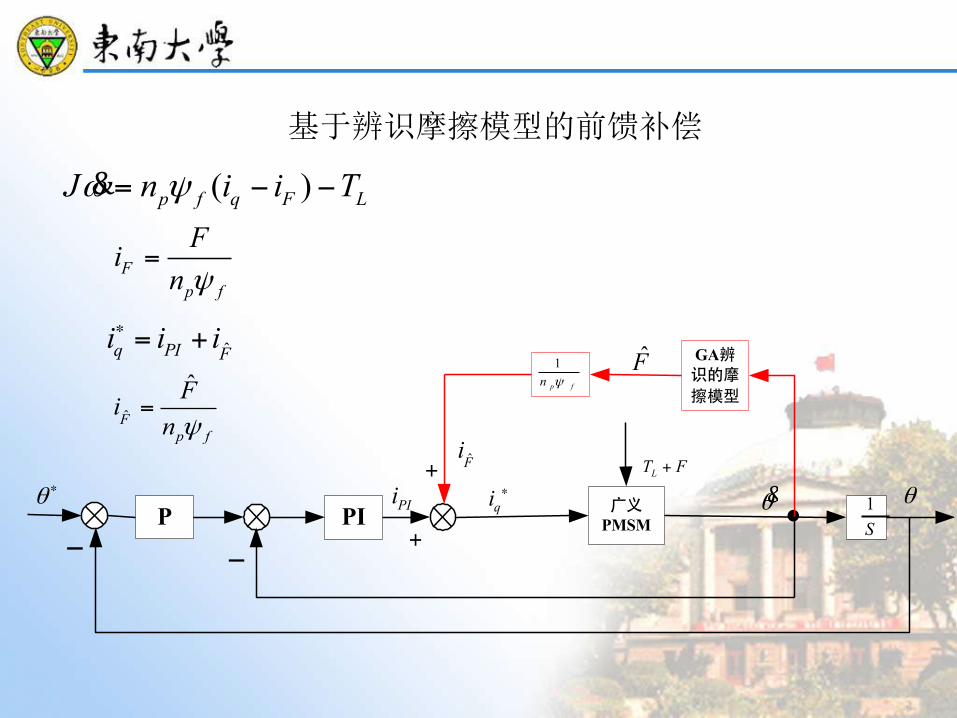
基于辨识摩擦模型的前馈补偿 ( )p f q F LJ n i i Tω ψ= − −&
θ&θ ∗
+
θ
−PI
+
qi∗
广义PMSM
1SP
1
p fn ψF̂
LT F+
−
F̂i
PIi
GA辨识的摩
擦模型
Fp f
Fin ψ
=
ˆq PI Fi i i∗ = +
ˆ
ˆF
p f
Fin ψ
=
19
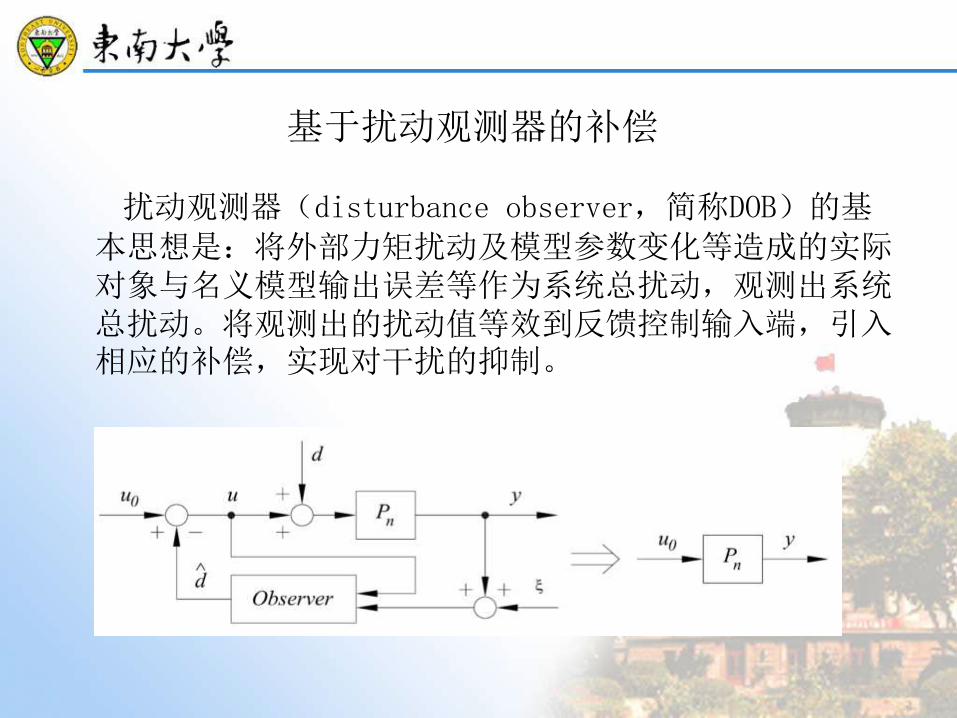
基于扰动观测器的补偿
扰动观测器(disturbance observer,简称DOB)的基本思想是:将外部力矩扰动及模型参数变化等造成的实际对象与名义模型输出误差等作为系统总扰动,观测出系统总扰动。将观测出的扰动值等效到反馈控制输入端,引入相应的补偿,实现对干扰的抑制。
20
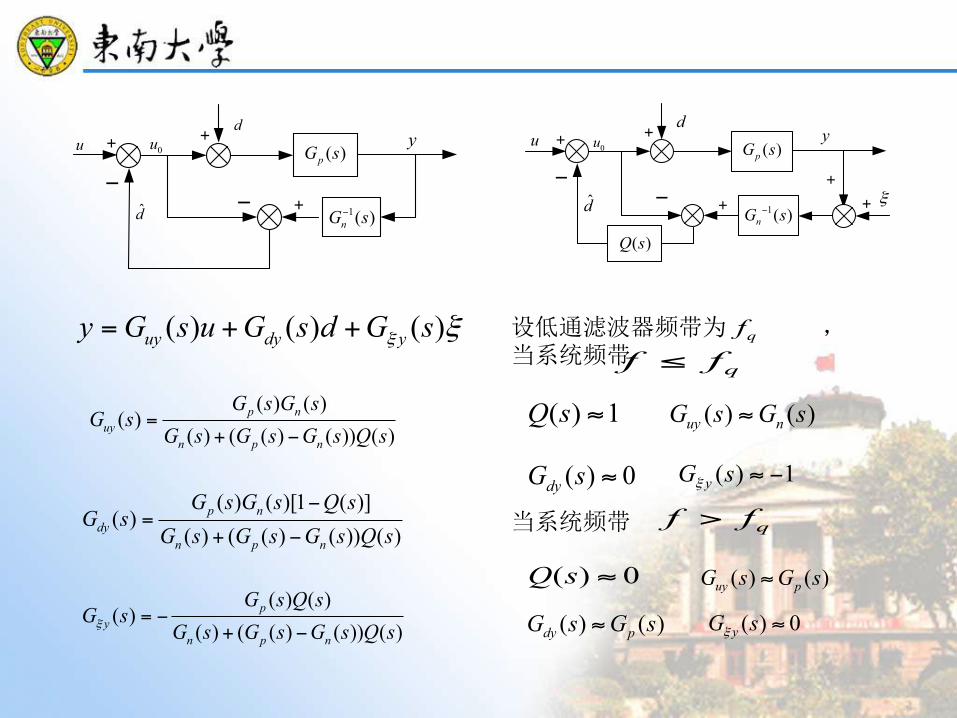
设低通滤波器频带为 ,当系统频带
当系统频带
( )pG s0ud+ y+
−d̂ 1( )nG s−+−
u
( )Q s
( )pG s0u
1( )nG s−
d+ y
ξ+
++
+
−−
u
d̂
( ) ( ) ( )uy dy yy G s u G s d G sξ ξ= + +
( ) ( )( )
( ) ( ( ) ( )) ( )p n
uyn p n
G s G sG s
G s G s G s Q s=
+ −
( ) ( )[1 ( )]( )
( ) ( ( ) ( )) ( )p n
dyn p n
G s G s Q sG s
G s G s G s Q s−
=+ −
( ) ( )( )
( ) ( ( ) ( )) ( )p
yn p n
G s Q sG s
G s G s G s Q sξ = −+ −
( ) ( )uy nG s G s≈
( ) 0dyG s ≈
( ) 1yG sξ ≈ −
( ) ( )uy pG s G s≈
( ) ( )dy pG s G s≈ ( ) 0yG sξ ≈
qf
qf f≤
( ) 1Q s ≈
qf f>
( ) 0Q s ≈

21
p f Lq
n TFiJ J Jϕ
ω = − −&
由电机运动方程:
ˆ0 0db i b dω = +&
*ˆ ˆq Fdi i i= −
*
0
ˆL
q qp f p f
T F Fd i ib b n nθ θ
ψ ψ−
= − + − − −&& &&
根据速度环控制器设计需要以及摩擦前馈补偿的原理
DOB需观测出系统中电流环跟踪误差、模型参数变化、 负载改变及摩擦模型过补偿或欠补偿等引起的扰动。
0p f
n
nb
Jψ
=
p fnb
Jψ
=
22
1( )ˆ1
nyG s ud
sτ
− −=
+
( ) bG ss
= 0( )nb
G ss
=
y ω=d̂
u i=
ˆ0
0
ˆ( 1 1
ds b i ddb s sω
τ τ
−= =
+ +)
τ
ˆ( ) ( )d t d t≈
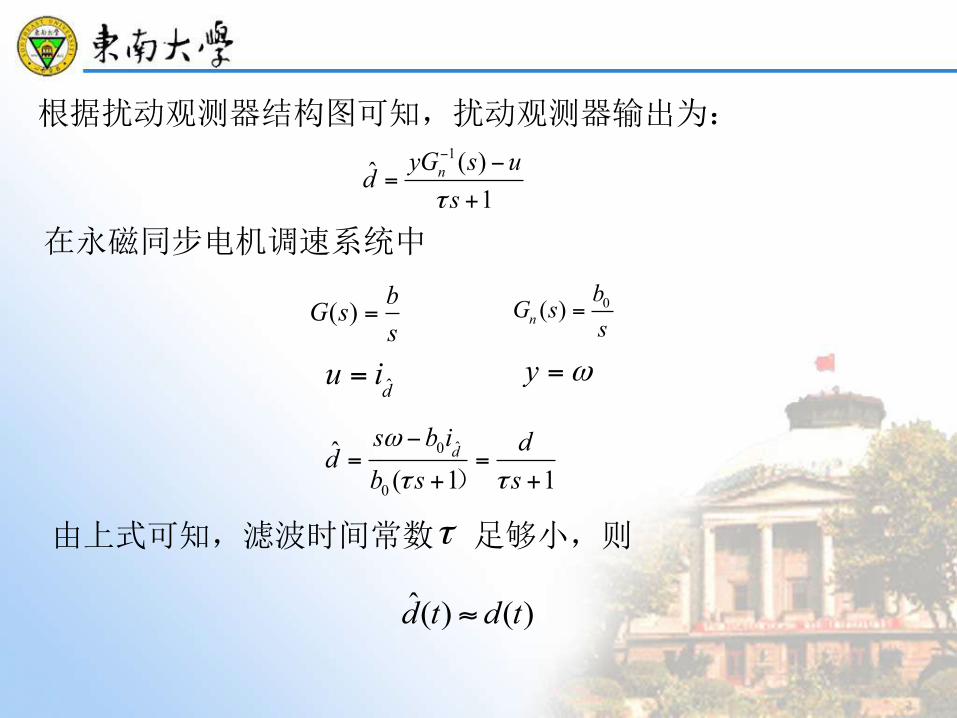
根据扰动观测器结构图可知,扰动观测器输出为:
由上式可知,滤波时间常数 足够小,则
在永磁同步电机调速系统中
23
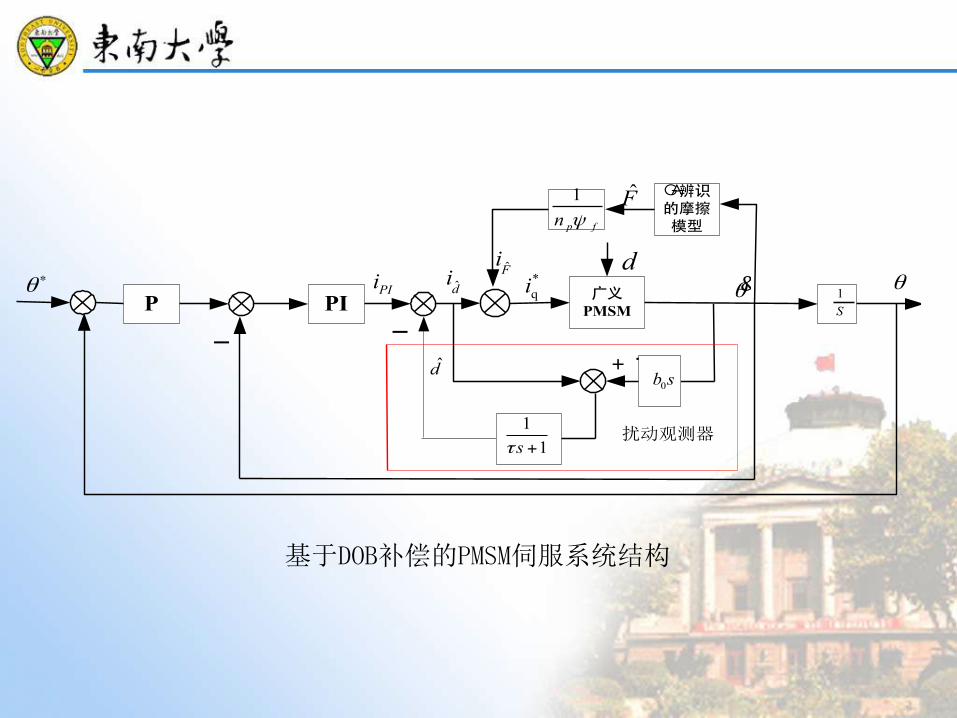
基于DOB补偿的PMSM伺服系统结构
d
−d̂
θ&θ ∗
−+
θ
−
扰动观测器
0b s
PI*qi
11sτ +
广义PMSM
1SP
PIi d̂i F̂i
1
p fn ψF̂ GA辨识
的摩擦模型
24
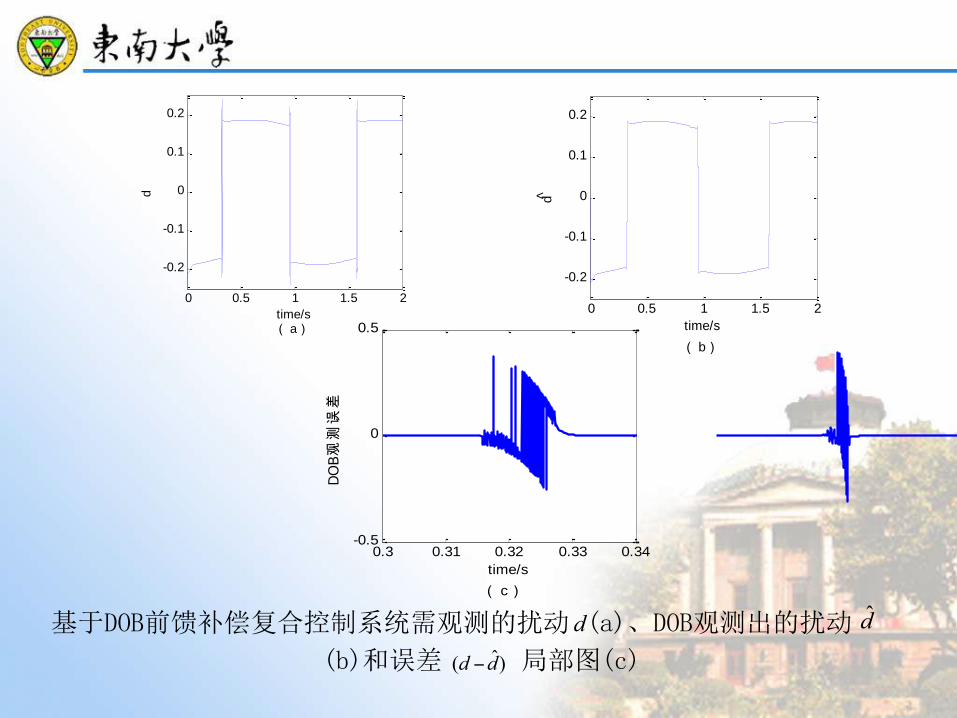
d d̂ˆ( )d d−
基于DOB前馈补偿复合控制系统需观测的扰动 (a)、DOB观测出的扰动
(b)和误差 局部图(c)
0 0.5 1 1.5 2
-0.2
-0.1
0
0.1
0.2
time/s
d
( a)
0 0.5 1 1.5 2-0.4
-0.2
0
0.2
0.4
0 0.5 1 1.5 2-0.4
-0.2
0
0.2
0.4
time/s
d
( a)
0 0.5 1 1.5 2
-0.2
-0.1
0
0.1
0.2
0 0.5 1 1.5 2
-0.2
-0.1
0
0.1
0.2
time/s
i F
( a)实际摩擦力矩的电流形式
<
0 0.5 1 1.5 2
-0.2
-0.1
0
0.1
0.2
time/s
i F
( b)辨识摩擦力矩前馈补偿电流
0 0.5 1 1.5 2
-0.2
-0.1
0
0.1
0.2
time/s
d
( b)
<
0 0.5 1 1.5 2
-0.2
-0.1
0
0.1
0.2
time/s
d
( b)
<
0.3 0.31 0.32 0.33 0.34-0.5
0
0.5
time/s
DOB观测误差
( c)
0.3 0.31 0.32 0.33 0.34-0.5
0
0.5
time/s
DOB观测误差
( c)
25
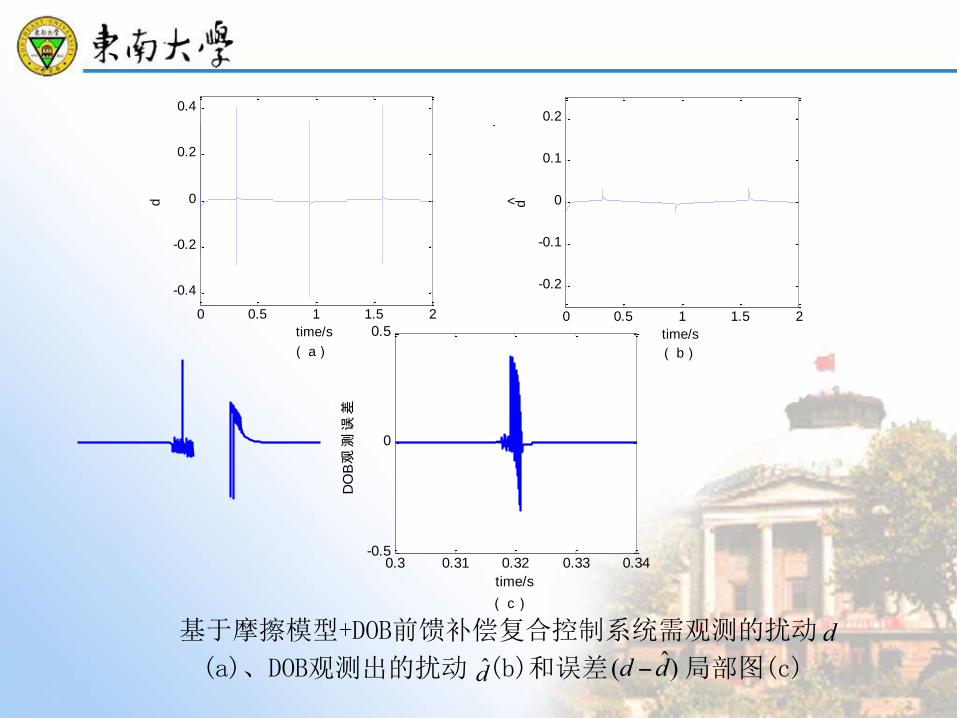
dd̂ ˆ( )d d−
基于摩擦模型+DOB前馈补偿复合控制系统需观测的扰动
(a)、DOB观测出的扰动 (b)和误差 局部图(c)
0 0.5 1 1.5 2
-0.2
-0.1
0
0.1
0.2
time/s
d
( a)
0 0.5 1 1.5 2-0.4
-0.2
0
0.2
0.4
0 0.5 1 1.5 2-0.4
-0.2
0
0.2
0.4
time/s
d
( a)
0 0.5 1 1.5 2
-0.2
-0.1
0
0.1
0.2
0 0.5 1 1.5 2
-0.2
-0.1
0
0.1
0.2
time/s
i F
( a)实际摩擦力矩的电流形式
<
0 0.5 1 1.5 2
-0.2
-0.1
0
0.1
0.2
time/s
i F
( b)辨识摩擦力矩前馈补偿电流
0 0.5 1 1.5 2
-0.2
-0.1
0
0.1
0.2
time/s
d
( b)
<
0 0.5 1 1.5 2
-0.2
-0.1
0
0.1
0.2
time/s
d
( b)
<
0.3 0.31 0.32 0.33 0.34-0.5
0
0.5
time/s
DOB观测误差
( c)
0.3 0.31 0.32 0.33 0.34-0.5
0
0.5
time/s
DOB观测误差
( c)
26
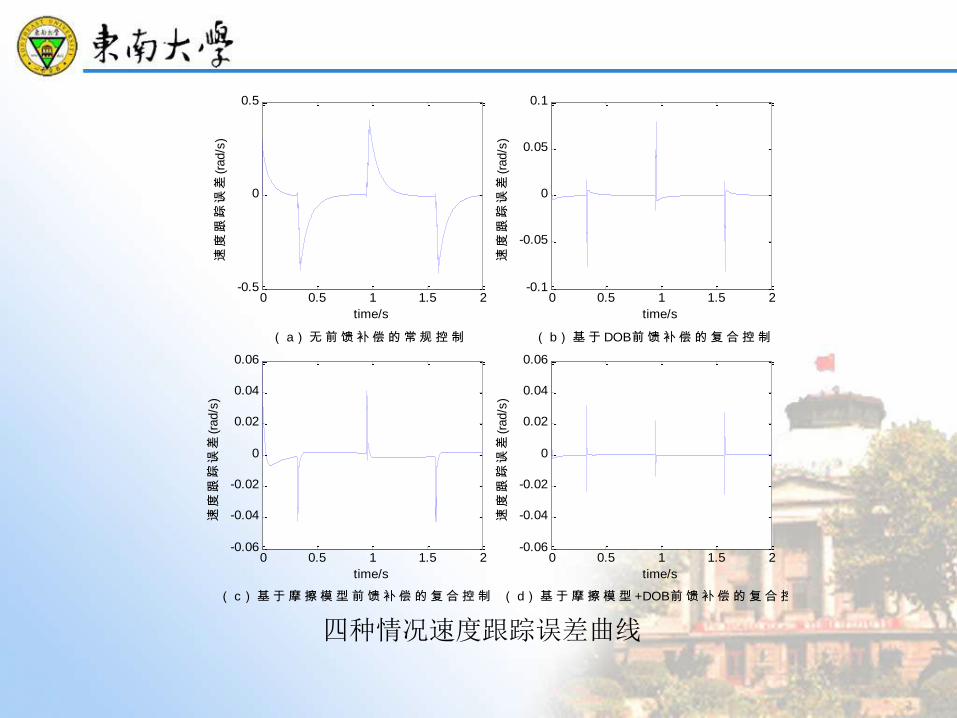
0 0.5 1 1.5 2-0.5
0
0.5
time/s
速度跟踪误差
(rad/
s)
( a)无前馈补偿的常规控制
0 0.5 1 1.5 2-0.06
-0.04
-0.02
0
0.02
0.04
0.06
time/s
速度跟踪误差
(rad/
s)
( c)基于摩擦模型前馈补偿的复合控制
0 0.5 1 1.5 2-0.06
-0.04
-0.02
0
0.02
0.04
0.06
time/s
速度跟踪误差
(rad/
s)
( d)基于摩擦模型 +DOB前馈补偿的复合控制
0 0.5 1 1.5 2-0.1
-0.05
0
0.05
0.1
time/s
速度跟踪误差
(rad/
s)
( b)基于 DOB前馈补偿的复合控制
四种情况速度跟踪误差曲线
27
0 0.5 1 1.5 2-2
-1
0
1
2
time/s
d
(a)
0 0.5 1 1.5 2-2
-1
0
1
2
time/s
d
(b)
<
0 0.5 1 1.5 2-0.5
0
0.5
1
1.5
time/s(c)
DOB观测误差
0 0.5 1 1.5 2-2
-1
0
1
2
time/s
d
(a)
0 0.5 1 1.5 2-2
-1
0
1
2
time/s
d
(b)
<
0 0.5 1 1.5 2-0.5
0
0.5
1
1.5
time/s(c)
DOB观测误差
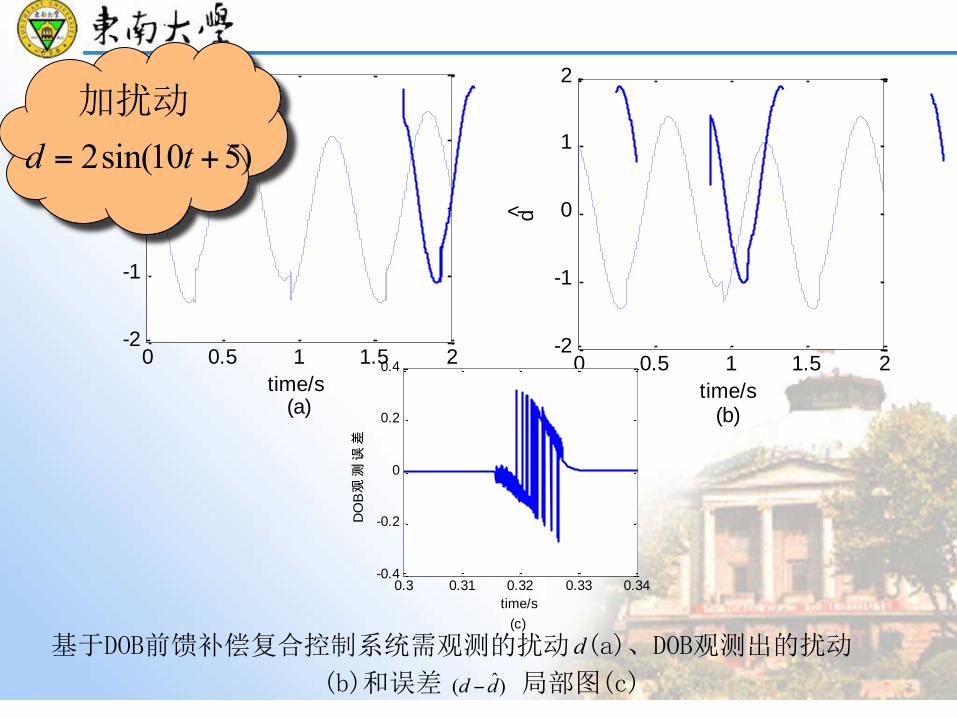
加扰动
2sin(10 5)d t= +
dˆ( )d d−
基于DOB前馈补偿复合控制系统需观测的扰动 (a)、DOB观测出的扰动
(b)和误差 局部图(c)
0 0.5 1 1.5 2-1.5
-1
-0.5
0
0.5
1
1.5
time/s
d(a)
0 0.5 1 1.5 2-1.5
-1
-0.5
0
0.5
1
1.5
time/s
d
(b)
<
0.3 0.31 0.32 0.33 0.34-0.4
-0.2
0
0.2
0.4
time/s(c)
DOB观测误差
28
0 0.5 1 1.5 2-2
-1
0
1
2
time/s
d
(a)
0 0.5 1 1.5 2-2
-1
0
1
2
time/s
d
(b)
<
0 0.5 1 1.5 2-0.5
0
0.5
1
1.5
time/s(c)
DOB观测误差
0 0.5 1 1.5 2-2
-1
0
1
2
time/s
d
(a)
0 0.5 1 1.5 2-2
-1
0
1
2
time/s
d
(b)
<
0 0.5 1 1.5 2-0.5
0
0.5
1
1.5
time/s(c)
DOB观测误差
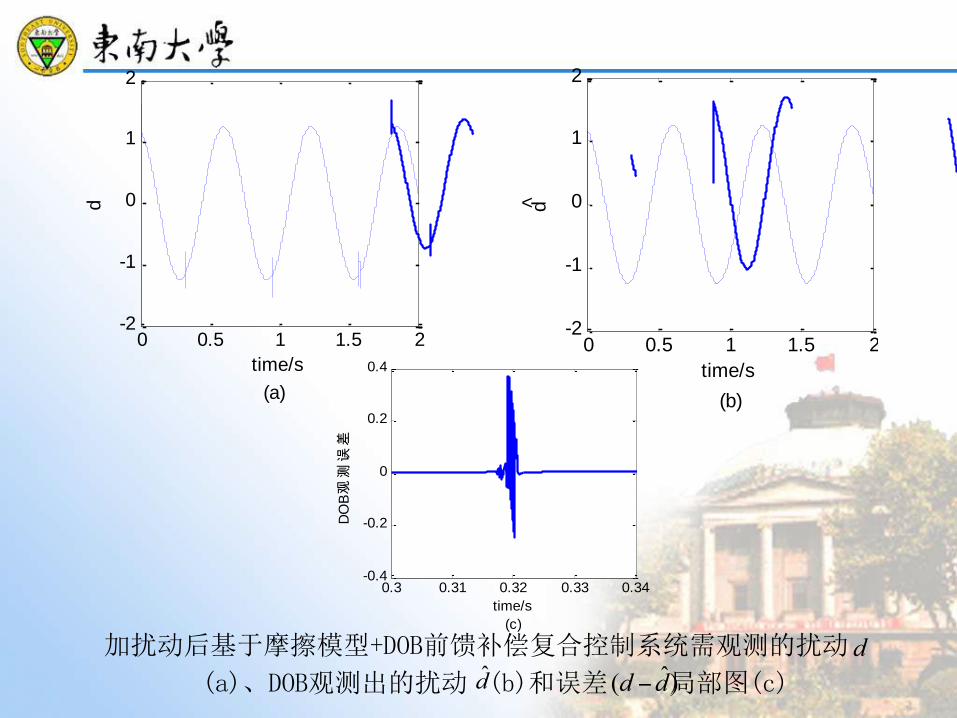
dd̂ ˆ( )d d−
加扰动后基于摩擦模型+DOB前馈补偿复合控制系统需观测的扰动
(a)、DOB观测出的扰动 (b)和误差 局部图(c)
0 0.5 1 1.5 2-2
-1
0
1
2
time/s
d(a)
0 0.5 1 1.5 2-1.5
-1
-0.5
0
0.5
1
1.5
time/s
d
(b)
<
0.3 0.31 0.32 0.33 0.34-0.4
-0.2
0
0.2
0.4
time/s(c)
DOB观测误差

29
0 0.5 1 1.5 2-0.2
-0.1
0
0.1
0.2
( d)基于摩擦模型 +DOB的复合控制time/s
速度跟踪误差
0 0.5 1 1.5 2-1.5
-1
-0.5
0
0.5
1
( c)基于摩擦模型的复合控制time/s
速度跟踪误差
0 0.5 1 1.5 2-1.5
-1
-0.5
0
0.5
1
( a)常规 PI控制
time/s
速度跟踪误差
0 0.5 1 1.5 2-0.2
-0.1
0
0.1
0.2
time/s
速度跟踪误差
( b)基于 DOB的复合控制
加扰动情况下速度跟踪误差曲线

30
五、小结
基于摩擦模型的前馈补偿控制 弥补了基于DOB补偿方法对零速时摩擦非线性的补偿能力有限的缺陷,减轻了DOB对扰动的估计负担。
基于DOB补偿方法中DOB可观测并补偿系统中过补偿或欠补偿的摩擦,降低了对摩擦模型精度的要求。此外,DOB还可观测出系统建模误差带来的不确定性和外界扰动,提高了系统抗扰动能力。
两种控制方法的有机结合,改善了系统低速系能,且提高了速度和位置跟踪精度以及系统抗扰动能力。

31
五、小结
• 所选择的摩擦模型为Stribeck静态摩擦模型,不 能描述摩擦重要的动态特性。因此,所选用模型 不是非常的精确,可进一步考虑动态摩擦模型。
• 摩擦模型参数辨识采用的是离线最小二乘参数辨 识法。输入输出数据的测试比较繁琐,所取的数 据对越多,辨识精度越高。因此,可以考虑在线 辨识方法。
• 对于摩擦非线性的补偿,针对永磁同步电机系统, 采用的是基于摩擦模型的固定补偿方法。虽然仿真 手段证明了其有一定的补偿效果,但未在实际系统 中加以调试。因此该方法的实际可行性有待进一步 实验验证。