Embed Size (px)
Citation preview

29
第4章 微小歪とGreen-Lagrange歪
高校や大学の教養で学習する力学といえば,大きさはなく質量のみ有する質点の力学や大きさはあるが, 形状は変化しない剛体の力学である. これに対して, 連続体力学は, 固体あるいは流体を体積が無限小の点であるが分子・原子のレベルには至ることなく, その点の近傍の平均的な物理諸量を有する「物質点」の連続的な集合である連続体とみなして, 質量保存則, 運動量保存則, 角運動量保存則など基本的な関係から変形や流れ場の変化などを予測するものである.
連続体力学で導入される概念は, 歪テンソル, 応力テンソル, 応力歪関係式(構成式)であるが, これまで材料力学で学習した内容は, 歪は単位長さあたりののび,
応力は単位面積当たりの荷重, 応力歪関係式といえばヤング率, 応力, 歪をそれぞれ, E, σ, ε としたときに σ = Eε という単純なもので, テンソルなんて, 使った記憶がない読者がほとんどであろう. まずはこのギャップを埋めるために質点や剛体の力学では登場しない歪から順に説明していこう.
4.1 垂直歪とせん断歪は別物か?
材料力学では長さ l の棒に引張荷重を作用させて,棒の長さが l1 になったとき、(l1 − l) を伸び、単位長さあたりの伸びを歪と呼び ε で表す。
ε =l1 − l
l(4.1)
特に引張荷重を与えたときのひずみを引張歪、逆に圧縮荷重を与えたときの歪を圧縮歪と呼ぶ。またこれらをあわせて、荷重方向の引張および圧縮歪をあわせて垂直歪と呼ぶ。
l
l1
FF

30 第 4章 微小歪とGreen-Lagrange歪
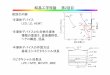
物体にせん断応力が作用して物体が平行四辺形に変形するとき Δz を元の長さ、Δδ を伸びとすれば、ひずみは
γ =Δδ
Δz(4.2)
と表すことができる。このひずみをせん断歪と呼ぶ。また、始めに π/2 であった角度が φ になったとするとせん断ひずみは角度変化
γ =π
2− φ (4.3)
としても定義することができる。 γ が微小である場合は tan γ ≈ γ, sin γ ≈ γ が近似的に成り立つことから、
γ ≈ tan γ = tan(π
2
)=
Δδ
Δz(4.4)
となり、二つの定義は一致する。
X1
X2
Δz
Δδ
γ
図 4.1: 単純せん断
応力同様、これらの歪は別物という印象を持っている人も少なくないように思われるが、これについて少し考えてみよう。
4.2 変位は物体内部を定義域とする関数である剛体の力学は運動しても変形しないと仮定している. つまり, 変形前の初期状態
で物体内部に正方格子を描いておくと,運動中も正方格子のまま平行移動や回転するだけである. これに対して変形する物体は,格子の間隔や角度は変化するし変形前には直線だった箇所が変形後には曲線になっている場合もあるだろう. 変形する物体を扱うということは, 変位は物体内で分布するということである.

4.2. 変位は物体内部を定義域とする関数である 31
変形前変形前変形後
変形後
図 4.2: 剛体の変形と連続体の変形
そこで変位を厳密に定義する必要がある. ある基準時刻 t0 における物体の配置を基準配置とし, 各物質点の位置ベクトルを X, 物質点 X の現時刻 t における位置ベクトルを x, 物質点 X の時刻 t0 から t までの移動量を変位ベクトル u とする.
u = x − X (4.5)
基準時刻 t0
現時刻 t
O
Xxu
図 4.3: 変位
連続体の教科書は決まってこのように変位を定義しているが,これはこれでわかりにくいので, 具体的な例題で示そう.
図のように 1辺の長さが 1の正方形領域に X1 方向の単純引張が与えられ,右端の点 (1, 0)が (a, 0)に移動したとき、各物質点 (X1, X2)の現在の位置 (x1, x2)と変位 u1, u2 を求めてみよう. またこれを図示するとそれぞれ (b), (c) のようになる.
x1 = X1 + aX1 (4.6)
x2 = X2 (4.7)
u1 = aX1 (4.8)
u2 = 0 (4.9)

32 第 4章 微小歪とGreen-Lagrange歪
u1
u2
x1
x2X1
X1
X1
X1
X1
X2
X2
X2
X2
X2
a(a)
(b) (c)
図 4.4: 現在の位置 x と変位 u の分布
図のように 1辺の長さが 1の正方形領域に X1 方向のせん断が与えられ,左上の点 (0, 1) が (a, 1) に移動したとき、各物質点 (X1, X2) の現在の位置 (x1, x2)と変位 u1, u2 を求めてみよう. またこれを図示するとそれぞれ (b), (c) のようになる.
x1 = X1 + aX2 (4.10)
x2 = X2 (4.11)
u1 = aX2 (4.12)
u2 = 0 (4.13)
u1
u2
x1
x2X1
X1
X1
X1
X1
X2
X2
X2
X2
X2
a(a)
(b) (c)
図 4.5: 現在の位置 x と変位 u の分布

4.2. 変位は物体内部を定義域とする関数である 33
図のように 1辺の長さが 1の正方形領域に X1 方向のせん断変形と X2 方向の圧縮変形を与え, 領域の左上の点 (0, 1) が (a, b) に移動したとき, 各物質点 (X1, X2)
の現在の位置 (x1, x2)と変位 u1, u2 を求めてみよう. またこれを図示するとそれぞれ (b), (c) のようになる.
x1 = X1 + aX2 (4.14)
x2 = X2 − bX2 (4.15)
u1 = aX2 (4.16)
u2 = −bX2 (4.17)
u1
u2
x1
x2X1
X1
X1
X1
X1
X2
X2
X2
X2
X2
a
b
(a)
(b) (c)
図 4.6: 現在の位置 x と変位 u の分布
このように書くと「変位場」と呼ばれる理由もよくわかるように感じる. つまり変位, あるいは現在の位置は, ある基準時刻 t0 における物体の配置を定義域とする関数である. この例題だと定義域は {(X1, X2)|0 ≤ X1 ≤ 1, 0 ≤ X2 ≤ 1} である. またベクトル関数なので微分や積分が大変なように感じるが,成分で考えれば通常の関数なので独立変数である X1, X2 で微分するのも容易である. 質点の場合は定義域は点でありこのような広がりはない. また, 剛体の場合は定義域の広がりはあるが, 形を変えずに平行移動するか回転するだけなので,剛体とともに平行移動あるいは回転する座標系からみれば,変位は生じていない. このように変位が分布するというのが連続体の特徴である.

34 第 4章 微小歪とGreen-Lagrange歪
4.3 物体の本質的な変形の尺度とは例えば薄板の端にモーメントをかけて巻き上げる現象では,全体としての変形は
大きいが, 微小な領域に着目すれば, 最初に正方形だった領域が若干扇形に変形しているだけで, 変位が大きくても壊れるわけではない.
M
図 4.7: 巻き上げの局所変形
領域が形状を変えずに平行移動する並進方向変位と,やはり形状を変えずに回転するときは, 変位は大きいが, 本質的には変形していない. そこで, 並進・回転に影響されない変形の尺度を導入する必要がある. これが, 歪である.
並進 回転
図 4.8: 並進と回転
材料力学で導入された歪は単位長さあたりののびである, という定義は並進変位の影響を受けないので妥当性があるが, 2 次元以上の場合や, 回転が含まれている場合は, この定義では意味がわからない. そこで, 並進や回転に影響されない量とはどういうものがあるか考えてみよう. ひとつの候補としては, 2 点間の距離がある.
微小なベクトル dX をとり, 2点を
X1 = X (4.18)
X2 = X + dX (4.19)

4.3. 物体の本質的な変形の尺度とは 35
とすると, ぞれぞれの点の現在の位置は以下のように表すことができる.
x1 = X1 + u(X1) = X + u(X) (4.20)
x2 = X2 + u(X2) = X + dX + u(X + dX) (4.21)
≈ X + dX + u(X) +∂u
∂XjdXj (4.22)
変形後の微小ベクトル dx = x2 − x1は
dx = dX +∂u
∂XjdXj (4.23)
変形後の 2 点間の距離は
dx · dx = dxidxi (4.24)
=
(dXi +
∂ui
∂Xj
dXj
)(dXi +
∂ui
∂Xk
dXk
)(4.25)
= dXidXi +∂ui
∂Xj
dXjdXi +∂ui
∂Xk
dXkdXi +∂ui
∂Xj
∂ui
∂Xk
dXjdXk (4.26)
ここで, ∂ui
∂Xj
∂ui
∂Xkの項は 2次の微小量なので無視すると,
dx · dx ≈ dXidXi +∂ui
∂Xj
dXjdXi +∂ui
∂Xk
dXkdXi (4.27)
= dX · dX +
(∂ui
∂Xj+
∂uj
∂Xi
)dXidXj (4.28)
ここで微小歪テンソル εijを以下のように定義する.
εij =1
2
(∂ui
∂Xj+
∂uj
∂Xi
)(4.29)
この微小歪テンソルを用いると変形前後における 2点間の距離の差は以下のように表すことができる.
dx · dx − dX · dX = 2εijdXidXj (4.30)
注 4.1. 材料力学で出てきた歪と比較してみよう。引張り圧縮の場合の歪は、単位長さあたりの伸びなので、以下のように同じ結果になる。
u1 = aX1, u2 = 0
ε11 =12
(∂u1
∂X1+
∂u1
∂X1
)=
12
(a + a) = a

36 第 4章 微小歪とGreen-Lagrange歪
せん断ひずみの場合は、注意が必要で
u1 = aX1, u2 = 0
ε12 =12
(∂u1
∂X2+
∂u3
∂X1
)=
12
(a) =a
2
と、半分になる。一般に連続体解析学では材料力学で出てきた γ を工学歪と呼ぶ。
γ = 2ε12 (4.31)
注 4.2. 1 次元で考えると, u を X で微分することは, 単位長さあたりの変位を求めていることなので, これまでの定義と整合性があることが確認できる. 例えば, 前述のせん断+圧縮の変形について, 微小歪を求めると変位が 1 次関数のときは歪は一定値を取ることがわかる. また, ε12 = ε21
である.
u1 = aX2 (4.32)u2 = −bX2 (4.33)
ε11 =12
(0 + 0) = 0 (4.34)
ε12 =12
(a + 0) =a
2(4.35)
ε21 =12
(0 + a) =a
2(4.36)
ε22 =12
(−b − b) = b (4.37)
また, 変位が 2 次関数であれば,
u1 = aX21 (4.38)
u2 = 0 (4.39)
ε11 =12
(2aX1 + 2aX1) = 2aX1 (4.40)
ε12 =12
(0 + 0) = 0 (4.41)
ε21 =12
(0 + 0) = 0 (4.42)
ε22 =12
(0 + 0) = 0 (4.43)
となる. こうすると, εij も「変位場」と同様に, ある基準時刻 t0 における物体の配置を定義域としX を独立変数とする関数であることがわかる. これを強調して, 「歪場」と呼ばれることもある.
さて, この εijは並進・回転に対して不変になっているか確認する必要がある. 並進については, u が位置 X によらず一定であるとき, つまり u1 = a1, u2 = a2 のときは, 当然ながら ∂ui
∂Xj= 0なので εij = 0であることが確認できる.

4.3. 物体の本質的な変形の尺度とは 37
回転については少し注意を要する. X1, X2が θだけ剛体回転したとすると,{x1
x2
}=
[cos θ − sin θ
sin θ cos θ
]{X1
X2
}=
{X1 cos θ − X2 sin θ
X1 sin θ + X2 cos θ
}(4.44)
定義に基づいて変位を求めると ui = xi − Xi から{u1
u2
}=
{X1(cos θ − 1) − X2 sin θ
X1 sin θ + X2(cos θ − 1)
}(4.45)
やはり定義に基づいて微小歪を求めると
[ε] =
[cos θ − 1 0
0 cos θ − 1
](4.46)
純粋に回転だけの変形では, 2 点間の距離は変わらないので, 歪を生じないはずだが, 微小歪は回転しただけでも歪を生じてしまう. 詳しくは後述するが, 微小歪は,
あくまで微小変形のときだけ対応している. θ ≈ 0 なら cos θ ≈ 1 なので, 確かに以下のようになっている.
[ε] =
[cos θ − 1 0
0 cos θ − 1
]≈[0 0
0 0
](4.47)
では, 微小歪のときに想定している回転, いわば微小回転とはどんなものだろうか. いろいろな説明があるが,
変位 =角速度×微小ではないΔt (4.48)
と考えると本質的かつわかりやすいと思う. つまり円運動をしている点がある時刻における速度のまま移動すると, 円周上から外れるが, Δtが本当に微小だったら,
円周上にあるとしてもよいということである.
θ
n
XXx
uu
図 4.9: 微小回転

38 第 4章 微小歪とGreen-Lagrange歪
θ が微小なときcos θ ≈ 1, sin θ ≈ θ (4.49)
と近似するが, これは X1 軸上の点についての微小回転を述べていると考える. X1
軸上以外の任意の (X1, X2)について対応した関係式に軸性ベクトルによる回転の式がある. 今円運動をしている平面に直交する単位ベクトルn を考えると, 以下のように表すことができる.
x = X + u = X + θn × X (4.50)
u = θn × X (4.51)
個別の成分で表すと,
u1 = θ(n2X3 − n3X2) (4.52)
u2 = θ(n3X1 − n1X3) (4.53)
u3 = θ(n1X2 − n2X1) (4.54)
これを用いて, 微小歪を計算すると
∂u1
∂X1= 0,
∂u1
∂X2= −n3,
∂u1
∂X3= n2 (4.55)
∂u2
∂X1= n3,
∂u2
∂X2= 0,
∂u2
∂X3= −n1 (4.56)
∂u3
∂X1= −n2,
∂u3
∂X2= n1,
∂u3
∂X3= 0 (4.57)
∂u1
∂X2= − ∂u2
∂X1,
∂u2
∂X3= − ∂u3
∂X2,
∂u3
∂X1= − ∂u1
∂X3(4.58)
以上よりεij = 0 (4.59)
となって, 確かに回転でも εij = 0になることが確認できた. しかしながら, これまで見てきたように目視で回転したことがわかるような変位であれば, εij = 0とはならないことに十分注意する必要がある.
4.4 歪の決定版Green-Lagrange歪それでは, 微小ではない回転角 θ でも εij = 0 になるような歪はどのようなもの
であろうか. もう一度歪の定義を見直してみよう. 最初から始めると, 微小なベク

4.4. 歪の決定版Green-Lagrange歪 39
トル dX をとり, 2点を X1 = X , X2 = X + dX とすると, ぞれぞれの点の現在の位置は以下のように表すことができる.
x1 = X1 + u(X1) = X + u(X) (4.60)
x2 = X2 + u(X2) = X + dX + u(X + dX) (4.61)
≈ X + dX + u(X) +∂u
∂XjdXj (4.62)
変形後の微小ベクトル dx = x2 − x1は
dx = dX +∂u
∂Xj
dXj (4.63)
ここまでは微小歪と同じであるが, 変形後の 2 点間の距離を導く際に 2次の微小量なので無視した ∂ui
∂Xj
∂ui
∂Xkを復活させてみよう. すなわち
dx · dx = dxidxi (4.64)
=
(dXi +
∂ui
∂XjdXj
)(dXi +
∂ui
∂XkdXk
)(4.65)
= dXidXi +∂ui
∂XjdXjdXi +
∂ui
∂XkdXkdXi +
∂ui
∂Xj
∂ui
∂XkdXjdXk (4.66)
とする. このとき, 初心者には添字の計算がややこしいと思うが, 式 (4.66)の第2,3,4項をあわせて
dx · dx = dX · dX +
(∂ui
∂Xj
+∂uj
∂Xi
+∂uk
∂Xi
∂uk
∂Xj
)dXidXj (4.67)
微小歪テンソル εijに対応して Eij を以下のように定義する.
Eij =1
2
(∂ui
∂Xj+
∂uj
∂Xi+
∂uk
∂Xi
∂uk
∂Xj
)(4.68)
これを用いるとdx · dx − dX · dX = 2EijdXidXj (4.69)
その意味では微小歪は,
dx · dx − dX · dX ≈ 2εijdXidXj (4.70)
であることに注意しよう. 並進変位について Eij = 0 となることは, εij の場合と同じである. 問題となった回転について考えてみよう.

40 第 4章 微小歪とGreen-Lagrange歪
{u1
u2
}=
{X1(cos θ − 1) − X2 sin θ
X1 sin θ + X2(cos θ − 1)
}(4.71)
だったので, 式 (4.68) にしたがって, Eij を計算してみる.
E11 =1
2
(∂u1
∂X1+
∂u1
∂X1+
∂uk
∂X1
∂uk
∂X1
)(4.72)
=1
2
(∂u1
∂X1
+∂u1
∂X1
+∂u1
∂X1
∂u1
∂X1
+∂u2
∂X1
∂u2
∂X1
+∂u3
∂X1
∂u3
∂X1
)(4.73)
=1
2
{(cos θ − 1) + (cos θ − 1) + (cos θ − 1)2 + sin2 θ + 0
}(4.74)
= 0 (4.75)
E22 =1
2
(∂u2
∂X2
+∂u2
∂X2
+∂uk
∂X2
∂uk
∂X2
)(4.76)
=1
2
(∂u2
∂X2+
∂u2
∂X2+
∂u1
∂X2
∂u1
∂X2+
∂u2
∂X2
∂u2
∂X2+
∂u3
∂X2
∂u3
∂X2
)(4.77)
=1
2
{(cos θ − 1) + (cos θ − 1) + (− sin θ)2 + (cos θ − 1)2 + 0
}(4.78)
= 0 (4.79)
E12 =1
2
(∂u1
∂X2+
∂u2
∂X1+
∂uk
∂X1
∂uk
∂X2
)(4.80)
=1
2
(∂u1
∂X2+
∂u2
∂X1+
∂u1
∂X1
∂u1
∂X2+
∂u2
∂X1
∂u2
∂X2+
∂u3
∂X1
∂u3
∂X2
)(4.81)
=1
2{− sin θ + sin θ + (cos θ − 1)(− sin θ) − sin θ(cos θ − 1) + 0} (4.82)
= 0 (4.83)
E21 = E12 である. このように 2 次の微小量を考慮すると,回転についても歪を生じなくなる. これを Green-Lagrange 歪という.
4.5 単純引張りと単純せん断代表的な変形モードである単純引張りと単純せん断を例にとり微小歪と Green-
Lagrange 歪を比べてみよう.

4.5. 単純引張りと単純せん断 41
単純引張りとは, 言葉通りだと
u1 = aX1, u2 = 0, u3 = 0 (4.84)
という変形モードである. もしも本当にこのような変形が実現したとすると, 2 倍に引き伸ばしたときに, 体積も 2 倍になることを意味している. これは物体の質量が保存されるとすれば, 密度が半分になること, つまり, 鉄も 10 倍に引き伸ばすと水に浮くようになるという現実味のない変形を意味する. そこで軸方向に引張ると直交方向に縮むという効果を含めて
u1 = aX1, u2 = −νaX1, u3 = −νaX1 (4.85)
とするのが一般的である. ν は Poisson 比と呼ばれている. 定義に従って ε11, E11
を求めてみると
ε11 =1
2(a + a) = a (4.86)
E11 =1
2
(a + a + a2
)=
1
2
(2a + a2
)(4.87)
となる. 言い換えると, 1 辺が L の立方体を引張り 1 辺が l になったとする.
u = l − L とすると
ε11 =u
L(4.88)
E11 =1
2
(l2
L2− 1
)(4.89)
である. こちらのほうが直感的に理解しやすいかもしれない. 具体的な値で比較すると l = 1.01L のとき, E11 = 0.01005, ε11 = 0.01,である. l = 1.1L のとき,
E11 = 0.105, ε11 = 0.1である. l = 2L のとき, E11 = 1.5, ε11 = 1 となる. 変形が小さいうちは, ほとんど差がないが, 変形が大きくなると差が開くことがわかる. 2
倍に伸びるという変形は鉄ではありえないが,ゴムなら普通なので柔軟な物体が目に見えるほどの変形をするような問題を扱う際には注意が必要なことがわかる.
単純せん断変形は∂u1
∂X2= γ �= 0 (4.90)
かつ残りの成分がすべて 0の変形である. 変位であれば
u1 = γX2 (4.91)
で残りの成分がすべて 0 である. 正方形領域が単純せん断変形をした場合, 図のように平行四辺形になる. 単純せん断変形では体積変化はない. また ∂u1/∂X2 = γ
を歪をせん断歪という.

42 第 4章 微小歪とGreen-Lagrange歪
X1
X2
図 4.10: 単純せん断
このとき微小歪は
ε =1
2
[0 γ
γ 0
](4.92)
であり, 感覚的に理解しやすいが, Green-Lagrange 歪はE22 �= 0である.
E =1
2(F T F − I) =
1
2
[0 γ
γ γ2
], (4.93)
4.6 Green-Lagrange 歪は剛体回転の影響を受けない最後に 1辺の長さが 1の正方形領域を X1 軸方向に a 倍に引き伸ばし θ 回転し
たときの Green-Lagrange 歪を求めてみよう.
X1
X2
1 aθ
図 4.11: 引張と剛体回転
引張りによって (X1, X2)が (x′1, x
′2)に移ったとすると{
x′1
x′2
}=
{(1 + a)X1
X2
}(4.94)

4.6. Green-Lagrange 歪は剛体回転の影響を受けない 43
(x′1, x
′2)を θ回転した点を (x1, x2)とすると{
x1
x2
}=
[cos θ − sin θ
sin θ cos θ
]{x′
1
x′2
}=
{x′
1 cos θ − x′2 sin θ
x′1 sin θ + x′
2 cos θ
}=
{(1 + a)X1 cos θ − X2 sin θ
(1 + a)X1 sin θ + X2 cos θ
}(4.95)
定義に従って u1, u2 を求めると{u1
u2
}=
{X1((1 + a) cos θ − 1) − X2 sin θ
X1(1 + a) sin θ + X2(cos θ − 1)
}(4.96)
となる. やはり定義に従って Green-Lagrange 歪を求めると
E11 =1
2
(∂u1
∂X1+
∂u1
∂X1+
∂uk
∂X1
∂uk
∂X1
)(4.97)
=1
2
(∂u1
∂X1
+∂u1
∂X1
+∂u1
∂X1
∂u1
∂X1
+∂u2
∂X1
∂u2
∂X1
+∂u3
∂X1
∂u3
∂X1
)(4.98)
=1
2
{((1 + a) cos θ − 1) + ((1 + a) cos θ − 1) + ((1 + a) cos θ − 1)2 + (1 + a) sin2 θ + 0
}(4.99)
=1
2(2a + a2) (4.100)
E22 =1
2
(∂u2
∂X2
+∂u2
∂X2
+∂uk
∂X2
∂uk
∂X2
)(4.101)
=1
2
(∂u2
∂X2+
∂u2
∂X2+
∂u1
∂X2
∂u1
∂X2+
∂u2
∂X2
∂u2
∂X2+
∂u3
∂X2
∂u3
∂X2
)(4.102)
=1
2
{(cos θ − 1) + (cos θ − 1) + (− sin θ)2 + (cos θ − 1)2 + 0
}(4.103)
= 0 (4.104)
E12 =1
2
(∂u1
∂X2+
∂u2
∂X1+
∂uk
∂X1
∂uk
∂X2
)(4.105)
=1
2
(∂u1
∂X2+
∂u2
∂X1+
∂u1
∂X1
∂u1
∂X2+
∂u2
∂X1
∂u2
∂X2+
∂u3
∂X1
∂u3
∂X2
)(4.106)
=1
2{− sin θ + (1 + a) sin θ + ((1 + a) cos θ − 1)(− sin θ) + (1 + a) sin θ(cos θ − 1) + 0}
(4.107)
= 0 (4.108)

44 第 4章 微小歪とGreen-Lagrange歪
となり, Green-Lagrange 歪は単純引張りの値と一致する. つまり, 剛体回転の影響を受けないことがわかる. 実はこれ以外の変形モードでも, Green-Lagrange 歪は剛体変形の影響を受けないことが証明できるのだが,証明にはテンソル解析の知識が必要になり本書の範囲を超えるので割愛する. 以下ではGreen-Lagrange 歪は剛体回転の影響を受けないとして議論を進める.

45
第5章 Cauchy応力
歪は物体の変形を正確に計測すれば観測できるものである. また, 物体に外部から与える表面力や重力や遠心力など物体の位置で決まる体積力は観測できるが,これらの外力に対して物体が変形した結果,物体内部に作用している力, 内力はいかなる手段でも観測することはできない. 丸棒の単純引張りなど均一な変形状態であれば, 応力は材料力学では単位面積当たりの力 σ と説明されることが多い. そのため応力はスカラー量, あるいは力なのでベクトル量であるというイメージを持っている人も少なくないと思うが, 3 次元的な変形をしている場合はこれから説明するように, 応力はスカラーでもベクトルでもなく,「法線ベクトルと応力ベクトルを結びつけるテンソル」である.
5.1 垂直応力とせん断応力は別物か?
一般的な材料力学の教科書では, 応力は単位面積当たりの力で, 垂直応力とせん断応力があり, それぞれ別の理論, すなわち, 垂直応力の場合は引張, 圧縮の軸力を受ける棒や梁の曲げ,せん断応力の場合は軸のねじりの理論において解説されている. そのため, 垂直応力と, せん断応力は別物という印象を持っている人も少なくないように思われるが, これについて少し考えてみよう.
図 5.1: 垂直応力, せん断応力
まず, どちらも物体内部に作用している力である. 垂直応力の場合は, 材料の引張り試験など軸力が作用している状態で,軸に垂直な断面で切断すると, 残りの部

46 第 5章 Cauchy応力
分から加えられていた力は軸に平行である. つまり, 断面の法線方向に平行で均一に分布していると考えられるのであれば,力の合計を断面積で割ったもの, あるいは, 均一に分布していないのであれば, ある微小面積に作用している力を微小面積で割ったものとして定義される.
せん断応力は, はさみで裁断するなど, 材料の軸に対して垂直な荷重によって, 面をずらすような力が作用している状態において,垂直応力と同様に軸に垂直な断面で切断すると, 残りの部分から加えられていた力は断面に平行である. つまり, 断面の法線方向に対して垂直であり,やはり均一に分布していると考えられるのであれば, 力の合計を断面積で割ったもの, あるいは, 均一に分布していないのであれば, ある微小面積に作用している力を微小面積で割ったものとして定義される.
垂直応力もせん断応力も実際に切断するわけではないが,物体を切断すると仮定して話をしている. どちらの場合も切断すると当然ながら,切断面は表面になるわけで, 物体の内部の力を考えるときは, 内部の力を内部でなくて, 仮想的に表面になったらどうなるかを想定して議論を進めていることがわかる.
物体の内部の話だと良くわからない感じがするが,外部から作用させる力であれば話は簡単である. つまり, 垂直応力とせん断応力のように, 引張り圧縮などの垂直方向の力 (a) と摩擦力に代表される水平方向の力 (b) しか存在せず, これらは別物である, ということはなく, 任意の方向を向いた力が作用していることを想定することは自然である. つまり, 垂直応力と, せん断応力が独立に存在するのではなく, 断面の法線方向成分が垂直応力, 断面内成分がせん断応力であり, 一般的にはどちらも同時に存在しているのである.
(a) (b) (c)
図 5.2: 断面に作用する力
5.2 変形した物体内部に作用する力–Cauchy 応力テンソル
これを前提にして議論を進めよう. 質点や剛体の力学で取り扱う力は表面から与えられる力と,重力や遠心力など物体の内部に作用する力である. これらはすべ

5.2. 変形した物体内部に作用する力–Cauchy 応力テンソル 47
て観測できる量である. しかし, 連続体解析学では物体が変形することを考慮し,
そのため物体が変形することにより生じる内部に作用する力を考慮するのだが,これは観測できない.
変形によって内部に作用する力といわれても,イメージがわかないので,力F で引張っているゴムひもを考えてみよう. これを真ん中で切断すれば元の長さに戻ってしまうが, もし切断面に切断前に作用していた力 Q を断面内での分布状態なども含めて正確に再現して作用させることができたなら,たとえ切断したとしても変形は生じないだろう.
ここで重要なのは, 与えるのはあくまで力であって, 変位を与えるわけではないということである. つまり, この力が変形している物体の内部に作用している力,
すなわち変形により生じる力である. そして, Newton の作用反作用の法則から,
切断面のある点においてはお互いにまったく逆向きの力が作用していることもわかる.
変形前
変形後
切断
F
F
−F
−F
Q
−Q
図 5.3: ゴムひもの切断
そこで, 物体内部に法線 n の仮想表面を考える. 法線 n の平面で物体を切断したと考えてもよいであろう. 一般には断面内で力の方向と大きさは分布するであろうから, 仮想表面上にとった微小な面素 ds に作用する力が dfn であるとする(図 5.2). dfn はn の関数なので厳密には df (n) と書くべきだが, 記述が煩雑になりすぎるので以後 dfnの形式で表す. このとき, 応力ベクトル tn は次のように定義される.
tn =dfn
ds(5.1)

48 第 5章 Cauchy応力
現時刻 tl
m
n
ds
dfn
図 5.4: 法線と応力ベクトル
金属の丸棒の引張り実験の場合, 応力は, 単位面積あたりに作用する力と定義し,
断面内では力は分布しないと仮定して,変形後の細くなった断面積で与えている荷重を割ったものを真応力として求めている. 上記の定義はこれを断面内で力の大きさと方向が分布すると拡張したものと考えるとわかりやすいだろう.
ここで tn は n のとり方によって値が変わることに注意しよう. 表面に荷重が作用しているときは, 当然ながら表面には任意性は無いので問題にならないが,内部に仮想的に断面を考えるときは任意性があり,実際に断面が変われば応力ベクトルの値は変化する.
図のような x1 軸方向への単純引張りを考える. 引張りと直交するx2−x3 平面で切断した場合法線ベクトルは x1 軸の基底ベクトル e1, 応力ベクトルは t1 = F /A
である. これに対して引張りの方向を含む平面,例えば x1 − x2 平面で切断すれば,
法線は x3 軸の基底ベクトル e3 で, t3 = 0である. まとめると
断面法線 : n = e1 t1 = 1 · e1 + 0 · e2 + 0 · e3
断面法線 : n = e2 t2 = 0 · e1 + 0 · e2 + 0 · e3
断面法線 : n = e3 t3 = 0 · e1 + 0 · e2 + 0 · e3 (5.2)
x1
x2
x3
t1 = F /At3 = 0
断面積 A
F
n
n
図 5.5: 断面と応力ベクトル

5.3. Cauchyの 4 面体と Cauchy 応力の物理的意味 49
そこで, 一般にn として基底ベクトル e1, e2, e3 をとったときの応力ベクトルを,
それぞれ t1, t2, t3 とする. そして t1, t2, t3 を基底で分解したときの成分を Tij であらわす.
t1 = T11e1 + T12e2 + T13e3 (5.3)
t2 = T21e1 + T22e2 + T23e3 (5.4)
t3 = T31e1 + T32e2 + T33e3 (5.5)
総和規約を使って表現するとti = Tijej (5.6)
この Tij の意味については後述するが, 言葉の定義として, T11, T22, T33 を垂直応力,
T12, T21, T23, T32, T31, T13 をせん断応力と呼ぶ.
注 5.1. �� 注 5.0 材料力学で学んだ垂直応力は, 軸に直交する断面, すなわち法線が軸に平行な断面でで切断したときの単位面積当たりの力なので, 式 (5.2) は感覚的にも理解できる. また、せん断応力は, 軸に平行な法線で切断したとき、法線方向の荷重が 0 で, 面内にのみに力が作用しているということで, 式にすれば以下のようになると考えられるが,第 2式は実は成立しない. この理由については後述する。
断面法線 : n = e1 t1 = 0 · e1 + 1 · e2 + 0 · e3
断面法線 : n = e2 t2 = 0 · e1 + 0 · e2 + 0 · e3 · · · ?断面法線 : n = e3 t3 = 0 · e1 + 0 · e2 + 0 · e3 · · · ? (5.7)
Tij にテンソルとしての基底 ei ⊗ ej をつけた
T = Tijei ⊗ ej (5.8)
を Cauchy 応力テンソルと呼ぶ. Cauchy 応力テンソルもテンソルなので座標変換ができる. また後述するCauchy の第 2 運動法則によって,対称テンソルであることが証明でき, したがって, 固有値はすべて実数である. この固有値のことを主応力, 対応した固有ベクトルのことを主応力方向と呼ぶ.
5.3 Cauchyの 4 面体と Cauchy 応力の物理的意味このように求めた応力テンソルは, 定義に座標系が使用されているので,ベクト
ルやテンソルは座標系に依存しない量という条件に反しているように思われるが,
これから説明する Cauchy の公式
tn = T T · n (5.9)

50 第 5章 Cauchy応力
と同値である. すなわち式 (5.15) を応力の定義と考えたとき, ある基底で分解したT の成分は
ti = Tijej (5.10)
の関係式を満たすと考えたほうがすっきりする. 今回は式 (5.10) を定義として, 式(5.15) を導いてみよう.
以下のような微小 4 面体 (Cauchy の 4面体)が静止しているとして, 力の釣り合いを考える. 面ABCの重心の法線ベクトルを n として, 応力ベクトルを tn とする. 厳密に言うと tnは三角形ABCの内部で変化するが, 微小なので一定値をとるとする. すなわち面積をΔsとして,∫
ABC
tndS = tnΔs (5.11)
である. また, 平面の法線ベクトルを −e1,−e2,−e3 として三角形 ABC の重心を通るように切断した際に得られる応力ベクトルを −t1,−t2,−t3とする. やはり厳密に言うと異なるが微小なので, これらは三角形OCB, OAC, OBA の重心における応力ベクトルとみなすことができ, さらに三角形OCB, OAC, OBA の面積をΔs1, Δs2, Δs3とすると∫
OCB
t1dS = t1Δs1,
∫OAC
t2dS = t2Δs2,
∫OBA
t3dS = t3Δs3 (5.12)
x1
x2
x3
−t1
−t2 −t3
tn
ΔsΔs1
Δs2
Δs3A
BC
O
密度を ρ,体積をΔv,物体の加速度 a,作用している体積力を gとすると, Cauchy
の 4面体に作用する力のつりあいは以下のように表すことができる.
ρ(a − g)Δv = tnΔs − t1Δs1 − t2Δs2 − t3Δs3 (5.13)

5.3. Cauchyの 4 面体と Cauchy 応力の物理的意味 51
ただし, この式は上述のように微小な場合のみ成立する. 厳密には, 4つの三角形の内部でそれぞれ応力ベクトルも分布し, 4 面体の内部では体積力や加速度が分布する. 全体を Δs で割ると, Δv/Δs → 0 である. 注 5.3 に示す計算により下式を示すことができる.
Δsi/Δs = ni (5.14)
以上より, n = niei から
tn = t1Δs1
Δs+ t2
Δs2
Δs+ t3
Δs3
Δs
= tini
= Tijejni
= Tij(ej ⊗ ei)nkek
= T T · n (5.15)
これを Cauchy の公式と呼ぶ. これは, T T が任意の n をその面に作用する応力ベクトル tn に変換することを示している. これをCauchy 応力の定義とする教科書もある.
注 5.2. 式 (5.15) を導くときには, (ei ⊗ ej) · ek = δjkei を利用して、
tn = tini
= Tijejni
= Tijejδiknk
= Tij(ej ⊗ ei)nkek
= T T · n
注 5.3. A, B, C のそれぞれの座標を {a, 0, 0}, {0, b, 0}, {0, 0, c}とする.また記述の簡略化のために
−→CA = a,
−−→CB = bとする.nは,a, bの外積を正規化して得られる.即ち,
a × b =
⎧⎨⎩a0−c
⎫⎬⎭×
⎧⎨⎩0b−c
⎫⎬⎭ =
⎧⎨⎩bccaab
⎫⎬⎭ , n =1√
b2c2 + c2a2 + a2b2
⎧⎨⎩bccaab
⎫⎬⎭ (5.16)
側面の面積はΔs1 = 12bc, Δs2 = 1
2ca, Δs3 = 12ab , また斜面の面積はΔs = 1
2 |a × b| なので,
Δs =12
√b2c2 + c2a2 + a2b2 (5.17)
これより,
n1 =Δs1
Δs, n2 =
Δs2
Δs, n3 =
Δs3
Δs(5.18)
が得られる.

52 第 5章 Cauchy応力
なお, 念のため, |n|は a, bを 2辺とする平行四辺形の面積ΔS(= 2Δsになることを示しておこう. a, b のなす角を θ とすると, 平行四辺形の底辺は |a| 高さは |b| sin θ なので
ΔS = |a| |b| sin θ = |a| |b|√
1 − cos2 θ (5.19)
= |a| |b|
√1 −
{a · b|a| |b|
}2
=√|a|2 |b|2 − (a · b)2 (5.20)
=√
(a2 + c2)(b2 + c2) − c4 =√
a2b2 + c2a2 + b2c2 (5.21)
5.4 テンソル表示の応力一部の連続体力学の教科書(流体, 固体とも)応力を以下のようにマトリックス
表示して応力テンソルと記述している場合がある. これと基底付きでテンソル表記したときの差はどこにあるのか考えてみよう.⎡⎢⎣T11 T12 T13
T21 T22 T23
T31 T32 T33
⎤⎥⎦ (5.22)
すべての定式化を通じて, 空間固定の直交デカルト座標系しか使わない,と約束すれば基底 ei ⊗ ej は応力, ひずみ, また, それらの速度などすべてのテンソルで共通なので, いちいち記述するのが面倒だから省略したと考えるのが妥当だと思われる.
もし場合に応じていろいろ座標系を取り直したほうがよいと思ったら基底を含めて記述する必要がある. 例えば主応力を T1, T2, T3, 固有ベクトルを ei とすると,⎡⎢⎣T11 T12 T13
T21 T22 T23
T31 T32 T33
⎤⎥⎦ =
⎡⎢⎣T1 0 0
0 T2 0
0 0 T3
⎤⎥⎦ (5.23)
という数式は, 数学的に明らかに誤りであるが, 基底をつけて書くと問題なく記述できる
Tijei ⊗ ej = Tiei ⊗ ei (5.24)
= T1e1 ⊗ e1 + T2e2 ⊗ e2 + T3e3 ⊗ e3 (5.25)
さらに応力や, ひずみをベクトル表示している教科書もある.⎧⎪⎨⎪⎩T11
T22
T12
⎫⎪⎬⎪⎭⎧⎪⎨⎪⎩
εx
εy
γxy
⎫⎪⎬⎪⎭ =
⎧⎪⎨⎪⎩ε11
ε22
2ε12
⎫⎪⎬⎪⎭ (5.26)

5.5. 主応力と, ミーゼス相当応力 53
これらはベクトル表示されているが,もちろん物理的な意味のある有向線分のベクトルではない. 特に {εx, εy, γxy} は工学ひずみと呼ばれていて, よく用いられる.
実際本書でも後述するように有限要素法の剛性方程式を導くときにはベクトル表示を用いている. これは本来はテンソルである応力やひずみを計算負荷を低減できるようにベクトル表示したものである. もともとのテンソルの応力や歪を理解した上でベクトル表示を使うのは便利であるが, 知らずに使うと, 物理的, 数学的な意味が全くわからなくなってしまうので, 注意を要する.
5.5 主応力と, ミーゼス相当応力これまで見てきたように, 応力はテンソルで成分表示したら 9 成分もあり可視
化して「ここの応力が高い」などと評価するのは困難である.
そもそもコンター図(等高線図)で可視化しようと思ったら, スカラー量でないと無理である. そこで登場するのがミーゼス相当応力である.
これは下式で定義されるスカラー量で,金属材料などが単軸で降伏する時の応力を σy として, 3次元的に変形している場合, ミーゼス相当応力が σy を超えたら降伏する. という条件判定などに使うもの.
σ =
(3
2σ′
ijσ′ij
) 12
(5.27)
ここで, σ′ij は偏差応力とよばれ
σ′ij = σij −
1
3σkkδij (5.28)
= σij −1
3(σ11 + σ22 + σ33)δij (5.29)
したがって, 構造物が塑性変形によって壊れるという場合は適切な指標といえるが, 亀裂進展によって破壊するときは, あまり適していない. その場合には, 主応力方向をベクトルで可視化するなどの方法が望ましい.

54
第6章 Gaussの発散定理とCauchy
の第1運動法則
Gauss の発散定理は連続体解析学のみならず有限要素定式化においても重要な定理であるため, 有限要素法の教科書なら必ず掲載されているが,難解なことでも知られており, 初心者が有限要素法を学習する上での大きな障壁になっているように思われる. ここでは, 少し風変わりな証明を紹介しよう.
そして, Cauchy 応力と Gauss の発散定理を用いて, 連続体力学でもっとも重要な関係式である Cauchy の第 1運動法則が導かれる. これは初めて聞いたという人でも, 流体力学で Navier-Stokes 方程式は聞いたことがあるひとは多いだろう.
Cauchy の第 1運動法則に Newton流体の構成式を代入したものが Navier-Stokes
方程式に他ならない. 実はこの法則は運動量保存則なのだが,同様に角運動量保存則から Cauchy 応力が対称テンソルであるという Cauchy の第 2運動法則が導かれる.
6.1 Gauss の発散定理とはGauss の発散定理は流体をイメージするとわかりやすいと思う。例えば密度が
ρ 流速が v の流体を考える。流体中に表裏の区別のある曲面 S を考えて、単位時間当たりに通過する流体の質量を求めてみよう。ただし裏から表へ通過する分をプラス、表から裏へ通過する分をマイナスとする。流速が分布する場合でも微小な面積 dS をとれば流速、方向、密度とも一定と考えることができる。もし dS とv が直交していれば、通過する体積は |v|dS である。(下図 (a) 参照) dS の単位長さの外向き法線 n を導入すると |v|dS = n · vdS と表すことができる。

6.1. Gauss の発散定理とは 55
dS
dSdS
dS
n
nn
n
vv
v
vn · v
θ
(a) (b) (c) (d)
直交していないときは、流速、方向、密度とも一定としているので、(b) のような体積を考えることになるが、これを n と v が同一平面状になるような方向から見ると (c) のようになる。傾いた円柱の高さは n と v のなす角を θ とすると|v| cos θ であるが、|n| = 1 とn · v = |n||v| cos θ であることから、単にn · v とすればよいことがわかる。したがって体積は、やはりn · vdSと表すことができる。(d) のように v と n が逆を向いているときも、cos θ < 0 であり、n · v < 0 になるので、問題ないことが確認できる。これを曲面 S 全体にわたって積分すると S
を通過する質量は以下のように求められる。∫S
ρn · vdS (6.1)
この v は特に流速である必要はないので、抽象的に a として以下のような積分を定義することにする。 ∫
S
n · adS (6.2)
このような積分をフラックスという。次にある領域 V を考える。この V の表面に対するフラックスを考えてみよう。
ただし、表面 S は外側を表、内側を裏とする。フラックスはベクトル場 a が与えられたとき、S を決めれば定まるという意味で S の関数であり、 S は V により一意に定まるのでフラックスは V の関数であるということができる。これを μ(V )
とおくと
μ(V ) =
∫S
n · adS (6.3)
このように定義した μ(V ) は V を V = V1 + V2 に分割したとき分割面では法線が逆になりフラックスが打ち消しあうので下式が成立する。
μ(V ) = μ(V1 + V2) = μ(V1) + μ(V2) (6.4)

56 第 6章 Gaussの発散定理とCauchyの第 1運動法則
n1 n2V1 V2
当然ながら、これを続ければ、分割する領域は微小体積 dV であってもかまわないことがわかる。μ(dV ) を dV で割れば、単位体積あたりのフラックス、いわば体積密度を考えることができる。これを a の発散といい diva であらわすことにする。すなわち
diva =dμ
dV(6.5)
両辺をそれぞれ領域 V に渡って積分すると∫V
divadV =
∫V
dμ
dVdV = μ(V ) (6.6)
したがって ∫V
divadV =
∫S
n · adS (6.7)
が得られる。これを Gauss の発散定理という。
6.2 発散の成分表示次に divaの成分表示をしてみよう。微小な正数 dx1, dx2, dx3を定め P (x1, x2, x3),
Q1(x1+dx1, x2, x3), Q2(x1, x2+dx2, x3), Q3(x1, x2, x3+dx3)とする。PQ1, PQ2, PQ3
を 3辺とする微小な直方体 dV を考える。この内部では diva は一定の値をとるとする。すなわち ∫
V
divadV = divadx1dx2dx3 (6.8)
とする。このとき∫
Sn ·adS はどうなるだろうか。微小体積といっても a は分布
することに注意しよう。x1 軸方向で考えると、直方体の両側 P, Q1 ではそれぞれa = a(x1, x2, x3), a1 = a(x1 + dx1, x2, x3) である。ここで dx1 が微小であることを考えると、
a1(x1 + dx1, x2, x3) = a1(x1, x2, x3) +∂a1
∂x1
dx1 (6.9)
a2(x1 + dx1, x2, x3) = a2(x1, x2, x3) +∂a2
∂x1
dx1 (6.10)
a3(x1 + dx1, x2, x3) = a3(x1, x2, x3) +∂a3
∂x1
dx1 (6.11)

6.2. 発散の成分表示 57
と表すことができる。n は P では n = (−1, 0, 0), Q1 では n1 = (1, 0, 0) であり、面積はともに dx2dx3 なので、
∫S
n · adS の x1 方向の積分は
n · adx2dx3 + n1 · a1dx2dx3 = −a1dx2dx3 +
(a1 +
da1
dx1dx1
)dx2dx3 (6.12)
=da1
dx1dx1dx2dx3 (6.13)
n1n
a1a
PQ1
Q2
Q3
残りの x2, x3 方向も同様であるから全体を考えると∫S
n · adS =
(∂a1
∂x1+
∂a2
∂x2+
∂a3
∂x3
)dx1dx2dx3 (6.14)
一方 ∫V
divadV = divadx1dx2dx3 (6.15)
である。Gauss の発散定理より、∫
Sn · adS =
∫V
divadV なので、
divadx1dx2dx3 =
(∂a1
∂x1+
∂a2
∂x2+
∂a3
∂x3
)dx1dx2dx3 (6.16)
したがって、以下のように diva は成分表示できる。
diva =∂a1
∂x1+
∂a2
∂x2+
∂a3
∂x3(6.17)
ベクトル演算子, Hamilton の演算子あるいはナブラ (nabla) などと呼ばれる
∇x =∂
∂xi
ei (6.18)
を定義すると、見かけ上ベクトルとして扱うことができるようになるので
∇x · a =∂a1
∂x1+
∂a2
∂x2+
∂a3
∂x3= diva (6.19)
のように記述することができる。これを用いて Gauss の発散定理を書き直すと以下のようになる。 ∫
V
∇x · adV =
∫S
n · adS (6.20)

58 第 6章 Gaussの発散定理とCauchyの第 1運動法則
6.3 テンソルの Gauss の発散定理Gauss の発散定理は簡単にテンソル版を導くことができる。式 (6.20) は成分で
書くと ∫V
∂a1
∂x1+
∂a2
∂x2+
∂a3
∂x3dV =
∫S
n1a1 + n2a2 + n3a3dS (6.21)
この a1, a2, a3 に T1j , T2j , T3j(j = 1, 2, 3) を代入する。∫V
∂T1j
∂x1+
∂T2j
∂x2+
∂T3j
∂x3dV =
∫S
n1T1j + n2T2j + n3T3jdS (6.22)∫V
∂Tij
∂xidV =
∫S
niTijdS (6.23)
両辺に基底ベクトル ej をつけると以下のようになる。∫V
∂Tij
∂xiejdV =
∫S
niTijejdS (6.24)∫V
∂
∂xk
ek · Tijei ⊗ ejdV =
∫S
nkek · Tijei ⊗ ejdS (6.25)∫V
∇x · T dV =
∫S
n · T dS =
∫S
T T · ndS (6.26)
式 (6.21) に Tj1, Tj2, Tj3(j = 1, 2, 3) を代入するということも考えられる。このときは同様の計算により ∫
V
T · ∇xdV =
∫S
T · ndS (6.27)
が得られる。式 (6.26)を前形 (あるいは左形)式 (6.27)を 後形 (あるいは右形)と呼ぶ。以下本書ではテンソルの発散については前形を用いることにする。
6.4 Cauchy の運動法則式 (6.26) の T を Cauchy応力としてみよう。第 2式の被積分関数 T T · n は応
力ベクトルの定義式であり、これを物体の表面全体にわたって積分するということは、物体に作用している表面力を求めることに他ならない。物体には表面力のほかに体積力が作用しており、加速度を慣性力として考慮すると、物体に作用している力の合計は 0 なので、∫
S
T T · ndS +
∫V
b − ρadV = 0 (6.28)

6.5. よく見かけるCauchyの第 1運動法則の証明の意味するところ 59
式 (6.26) を用いると、式 (6.28) の第 1項も体積積分に置き換えることができる。∫V
(∇x · T + b − ρa)dV = 0 (6.29)
この体積積分は領域を分割しても成立する。すなわち任意の一部分について、ひいては各物質点で成立する。すなわち
ρa = ∇x · T + b (6.30)
が成立する。これをCauchy の第 1運動法則と呼ぶ。成分表示すると、
ρaj =∂Tij
∂xi+ bj (6.31)
フリーインデックスが j になっていることについては以下の注を参照のこと。�� 注 6.1 式 (6.30) の∇x = ∂
∂xiei として、左辺第 1項は
∇x · T =∂
∂xieiTklek ⊗ el =
∂Til
∂xiel =
∂Tij
∂xiej
となるからである。もちろん添え字を入れ替えて ∂Tji
∂xjei でもよいが、わざわざ転置にする意味は
ないと思われる。注 6.1 終 ��
6.5 よく見かけるCauchyの第1運動法則の証明の意味するところ
一般的な有限要素法の入門書に採用されている Cauchy の第 1運動法則の証明は前節で説明したような Gaussの発散定理を用いたものではなく、正方形領域に作用する力のつりあいから Cauchy の第 1運動法則を導くものである。実はこの証明は大半が Gauss の発散定理の証明といえる。わかりやすく説明しよう。微小な正数 dx1, dx2 を定め P (x1, x2), Q1(x1 + dx1, x2), Q2(x1, x2 + dx2)とす
る。PQ1, PQ2 を 2辺とする長方形領域を考える。x1軸方向で考えると、長方形領域の両側 P, Q1作用する応力ベクトル t1は n =が P では n = (−1, 0, 0),Q1 では n1 = (1, 0, 0) であることから、それぞれ
−t1(x1, x2) = −T11(x1, x2)e1 − T12(x1, x2)e2 (6.32)
t1(x1 + dx1, x2) = T11(x1 + dx1, x2)e1 + T12(x1 + dx1, x2)e2 (6.33)

60 第 6章 Gaussの発散定理とCauchyの第 1運動法則
である。ここで dx1 が微小であることを考えると、
T11(x1 + dx1, x2) = T11 +∂T11
∂x1
dx1 (6.34)
T12(x1 + dx1, x2) = T12 +∂T12
∂x1
dx1 (6.35)
x2軸方向も同様で、長方形領域に働くすべての応力ベクトルを図示すると、
T11
T12
T22T21
T11 + ∂T11
∂x1dx1
T12 + ∂T12
∂x1dx1
T22 + ∂T22
∂x2dx2
T21 + ∂T21
∂x2dx2
実際に作用している力は、応力ベクトルに辺の長さを乗じる必要がある。x1 方向の力のつりあいは、
−T11dx2 +
(T11 +
∂T11
∂x1
dx1
)dx2 − T21dx1 +
(T21 +
∂T21
∂x2
dx2
)dx1 = 0 (6.36)
整理して∂T11
∂x1dx1dx2 +
∂T21
∂x2dx2dx1 = 0 (6.37)
dx1dx2 で割ると∂T11
∂x1+
∂T21
∂x2= 0 (6.38)
同様に x2 方向の力のつりあいは、
∂T12
∂x1
+∂T22
∂x2
= 0 (6.39)
これらをまとめると∂Tij
∂xi= 0 (6.40)

6.6. Cauchy の第 2運動法則 61
6.6 Cauchy の第2運動法則Cauchy の第 2運動法則は角運動量保存則から導かれ、Cauchy 応力テンソルは
対称テンソルである、というものである。
T = T T (6.41)
厳密な導出は難しいので簡略化して説明する。四角形に働く力は図のとおり。こ
T11
T12
T22T21
T11 + ∂T11
∂x1dx1
T12 + ∂T12
∂x1dx1
T22 + ∂T22
∂x2dx2
T21 + ∂T21
∂x2dx2
こで、四角形の重心周りの力のモーメントの釣り合いを考える。T11, T22 は回転させる力ではないので、除外。また、簡略化のためここでは高次項を無視する。
T11
T12
T22T21
T11
T12
T22
T21
このとき
T12dx2dx1
2× 2 = T21dx1
dx2
2× 2 (6.42)
よってT12 = T21 (6.43)
となり、Cauchy 応力は対称であることがわかる。

103
第11章 Cauchyの第一運動法則の独立変数をx から X にする
Cauchy の第 1運動法則で Cauchy 応力を微分しているのは x であり、X ではない。2.4 で真応力は作用している荷重を、細くなった断面積で割ったものと述べているが、まさにこれが x で微分することに相当する。もし、X で微分するのであれば、変形前の断面積で割ることになるだろう。その一方で、第 4 で定義した微小歪も Green-Lagrange 歪も変位 u を微分しているのはX である。直感的にも不合理が生じると考えられる。そこで、Cauchy の第 1運動法則の独立変数を x
から X にするのがこの章の主題である。ここで登場するのが、Cauchy 応力を変換して得られる第 1,2Piola-Kirchoff 応力である。
11.1 体積変化率と変形勾配Cauchy の第 1運動法則は
ρaj =∂Tij
∂xi
+ ρgj (11.1)
であり、Tij の微分以外にも、ρ は物体の質量を m, 変形後の体積を v として、
ρ =m
v(11.2)
であり、やはり分母に変位 u が含まれている. これを解決するために、変形勾配を導入する。変形前に Xi 軸に沿った微小ベクトル dXi が物体の変形後に dxi なったとする。
dX1, dX2, dX3 がつくる直方体の体積V = dX1dX2dX3 と変形後の平行 6 面体の体積 v の比を求めてみよう。

104 第 11章 Cauchyの第一運動法則の独立変数をx から X にする
dX1
dX2
dX3
dx1
dx2
dx3
まず微分の連鎖側から dXi, dxi の関係を導くと
dx1 =∂x1
∂X1dX1 +
∂x1
∂X2dX2 +
∂x1
∂X3dX3 (11.3)
dx2 =∂x2
∂X1dX1 +
∂x2
∂X2dX2 +
∂x2
∂X3dX3 (11.4)
dx3 =∂x3
∂X1dX1 +
∂x3
∂X2dX2 +
∂x3
∂X3dX3 (11.5)
マトリックス表示すれば⎧⎪⎨⎪⎩dx1
dx2
dx3
⎫⎪⎬⎪⎭ =
⎡⎢⎣∂x1
∂X1
∂x1
∂X2
∂x1
∂X3∂x2
∂X1
∂x2
∂X2
∂x2
∂X3∂x3
∂X1
∂x3
∂X2
∂x3
∂X3
⎤⎥⎦⎧⎪⎨⎪⎩
dX1
dX2
dX3
⎫⎪⎬⎪⎭ (11.6)
両辺に基底 ei をつけると
dx1 =∂x1
∂X1dX1e1 +
∂x1
∂X2dX2e2 +
∂x1
∂X3dX3e3 (11.7)
dx2 =∂x2
∂X1dX1e1 +
∂x2
∂X2dX2e2 +
∂x2
∂X3dX3e3 (11.8)
dx3 =∂x3
∂X1dX1e1 +
∂x3
∂X2dX2e2 +
∂x3
∂X3dX3e3 (11.9)
変形前の体積は V = dX1dX2dX3 である。変形後の体積は注を参考にして、
v =
∣∣∣∣∣∣∣∂x1
∂X1dX1
∂x1
∂X2dX2
∂x1
∂X3dX3
∂x2
∂X1dX1
∂x2
∂X2dX2
∂x2
∂X3dX3
∂x3
∂X1dX1
∂x3
∂X2dX2
∂x3
∂X3dX3
∣∣∣∣∣∣∣ =
∣∣∣∣∣∣∣∂x1
∂X1
∂x1
∂X2
∂x1
∂X3∂x2
∂X1
∂x2
∂X2
∂x2
∂X3∂x3
∂X1
∂x3
∂X2
∂x3
∂X3
∣∣∣∣∣∣∣ dX1dX2dX3 = JV (11.10)
以上から
ρ0 = Jρ, ρ =1
Jρ0 (11.11)
�� 注 11.1 ベクトル a, b, c が作る体積は (a × b) · c である。これを成分で表すと、まず a × b は
a × b =
∣∣∣∣∣∣a1 b1 e1
a2 b2 e2
a3 b3 e3
∣∣∣∣∣∣ = (a2b3 − a3b2)e1 + (a3b1 − a1b3)e2 + (a1b2 − a2b1)e3 (11.12)

11.2. ∇x を ∇X にできないか? 105
これより (a × b) · c は
(a × b) · c = (a2b3 − a3b2)c1 + (a3b1 − a1b3)c2 + (a1b2 − a2b1)c3 (11.13)= a1b2c3 + a2b3c1 + a3b1c2 − a1b3c2 + a2b1c3 + a3b2c1 (11.14)
=
∣∣∣∣∣∣a1 b1 c1
a2 b2 c2
a3 b3 c3
∣∣∣∣∣∣ (11.15)
注 11.1 終 ��
11.2 ∇x を ∇X にできないか?
実際に計算に入る前に、使用する関係式を導いておこう。まず非対称のテンソル Aについて、det Aを Aij で微分する。対称だと Cayley-Hamilton の定理を利用できるので比較的証明は簡単だがが、非対称だと以下のようになる。
∂ det A
∂Akl= (det A)A−1
lk (11.16)
この証明は注を参照のこと。�� 注 11.2 Aij の余因子を Bij とすると
A−1ij =
1detA
Bij (11.17)
detA を移項すると(det A)A−1
ij = Bij (11.18)
式 (11.18) の左側から A を作用させると
(det A)δij = AimBmj (11.19)
i = j のとき detA = AimBmi と表すことができる。この両辺を Akl で微分し式 (11.19) を利用すると
∂ det A
∂Akl= δikδmlBmi = Blk (11.20)
= det AA−1lk (11.21)
注 11.2 終 ��
次に式 (11.16) を用いると ∂J∂xiを計算できる。
∂J
∂xi= J
∂2xk
∂Xm∂Xl
∂Xm
∂xi
∂Xl
∂xk(11.22)
この証明は注を参照のこと。

106 第 11章 Cauchyの第一運動法則の独立変数をx から X にする
�� 注 11.3
∂J
∂xi=
∂J
∂Fkl
∂Fkl
∂xi= JF−1
lk
∂Fkl
∂xi(11.23)
= J∂Xl
∂xk
∂
∂xi
∂xk
∂Xl= J
∂Xl
∂xk
∂
∂Xm
∂Xm
∂xi
∂xk
∂Xl(11.24)
= J∂2xk
∂Xm∂Xl
∂Xm
∂xi
∂Xl
∂xk(11.25)
注 11.3 終 ��
最終的に∂
∂xi
(J−1 ∂xi
∂Xj
)= 0 (11.26)
の関係式を導くことができる。この証明は注を参照のこと。�� 注 11.4
∂
∂xi
(J−1 ∂xi
∂Xj
)= −J−2 ∂J
∂xi
∂xi
∂Xj+ J−1 ∂2xi
∂xi∂Xj(11.27)
= −J−1 ∂2xk
∂Xm∂Xl
∂Xm
∂xi
∂Xl
∂xk
∂xi
∂Xj+ J−1 ∂2xi
∂Xm∂Xj
∂Xm
∂xi(11.28)
= −J−1 ∂2xk
∂Xm∂Xl
(∂Xm
∂xi
∂xi
∂Xj
)∂Xl
∂xk+ J−1 ∂2xi
∂Xm∂Xj
∂Xm
∂xi(11.29)
= −J−1 ∂2xk
∂Xm∂Xl
∂Xm
∂Xj
∂Xl
∂xk+ J−1 ∂2xi
∂Xm∂Xj
∂Xm
∂xi(11.30)
= −J−1 ∂2xk
∂Xm∂Xlδmj
∂Xl
∂xk+ J−1 ∂2xi
∂Xm∂Xj
∂Xm
∂xi(11.31)
= −J−1 ∂2xk
∂Xj∂Xl
∂Xl
∂xk+ J−1 ∂2xi
∂Xm∂Xj
∂Xm
∂xi(11.32)
= 0 (11.33)
注 11.4 終 ��
塑性変形が進行し、やがて、試験片の一部が集中して変形するようになりくびれを生じ、最終的には破断する。このときの応力・ひずみ曲線を描くにあたり、歪は、最初にマーキングしておいた評点変位で計測するが、応力は2通りある。一つは、荷重 P を最も細くなっている箇所の断面積 A で割るもの、もう一つは、初期の断面積 A0 で割るものであり、前者を真応力、後者を公称応力と呼ぶ。この真応力を1軸状態から3次元に拡張したものが Cauchy 応力であるが、公
称応力を3次元に拡張した応力もあり、第1Piola-Kirchhoff 応力と呼ばれている。Cauchy 応力は、現在の配置における法線 n をもつ仮想表面上の微小面素 ds に作用する力 df に対して
tn =dfn
ds, tn = T T · n (11.34)

11.2. ∇x を ∇X にできないか? 107
と定義されていた。これは、ds が現在の配置における面積であることから、先の引張試験のときに求めた真応力と対応していることがわかる。では、公称応力はどのように定義されるかであるが、 dfn を変形前の面積 dS 、即ち、変形後に ds
になるような微小面素で割って
t =dfn
dS, t = ΠT · N (11.35)
となる Π として定義される。ただし、 N は変形後に n になるような変形前の配置における法線ベクトルであり、 n = Π · N である。幾何学的には、 dfn を変形前配置に平行移動したことになっている。
変形前配置 t0
ds
dS
dfn
dfn
Nn
平行移動現時刻 t
変形前後の面積の対応関係としてNausonの公式が知られている。
nds = (detF )F−T · NdS (11.36)
あるいはF T · N = (detF )NdS (11.37)
これを用いると、
dfn = ΠT · NdS =1
JΠT F T nds (11.38)
であるので、Cauchyの公式 dfn/ds = tn = T T · n と比較して
T =1
JF ·Π,Π = JF−1T (11.39)
この式からわかるようにT が対称であるのに対して、Πは非対称であり、また客観性を有しないので、構成式を作る際には使えない。これを改善したものが第2

108 第 11章 Cauchyの第一運動法則の独立変数をx から X にする
Piola-Kirchhoff応力である。第2Piola-Kirchhoff応力では、dfnをF−1で変換し、変形前の面積 dSで割る。即ち、
˜t =F−1dfn
dS= F−1 · t, ˜t = ST · N (11.40)
となるSとして定義される。変形 F と応力は別物なので dfnを F−1で変換することに、物理的には明確な意味はないが、この操作によってSは非常に便利な応力となりよく用いられる。やはりNansonの公式により、
fn = F · ST NdS =1
JFST F T · nds (11.41)
であるので、Cauchyの公式 dfn/ds = tn = T T · n と比較して
T =1
JF · S · F T , S = JF−1 · TF−T (11.42)
この式からわかるようにSは対称である。
変形前配置 t0
ds
dS
dfn
F−1dfn
Nn
F−1による変換
現時刻 t

225
第20章 幾何学非線形を考慮した境界値問題とは?
20.1 境界値問題下図に示すような, 物体 A についての境界値問題 [B] を考える.
[B] 物体 A が占める領域を Ω, Ω の境界を ∂Ω とし, ∂Ω の部分集合 ∂ΩD 上では変位境界条件が与えられているものとする. このような系に表面力 t, 体積力ρg が作用するとき, つり合い条件を満たす変位 u ∈ V を求めよ. ただし, ρ は密度, g は重力加速度, V は変位の許容関数すなわち変位境界条件を満たす解の候補全体の集合とする.
物体 A
表面力 t
体積力ρg
∂ΩD∂Ω
図 20.1: 境界値問題概念図
20.2 境界値問題の定式化この問題は以下のように定式化できる.
[B] 与えられた t, g に対し,以下を満たすような u ∈ V を求めよ.

226 第 20章 幾何学非線形を考慮した境界値問題とは?
[[1]] 平衡方程式 (Cauchy の第 1 運動法則)
∇x · T + ρg = 0 (20.1)
∇X ·(S · F T
)+ ρ0g = 0 (20.2)
[[2]] 境界条件式u = u on ∂ΩD (20.3)
T T · n = t on ∂Ω − ∂ΩD (20.4)(S · F T
)T · N = t (20.5)
[[3]] 変位・ひずみ関係式 [[4]] 応力・ひずみ関係式(構成式)このうち [1], [2] はいかなる問題でも共通(ただし,必要に応じて等価なものに書き換えることがある.),[4]は対象とする物質モデルで決まる.[3] は [4] に対応するものが選ばれる.平衡方程式と,力学的境界条件式を満足する一価連続な応力 T 全体の集合を T ,
変位境界条件を満足する一価連続な u 全体の集合を U とする. T ∈ T , u ∈ U とすると, 下式が成立する. ∫
v
(∇x · T + ρg) · u dv = 0 (20.6)
上式に発散定理を用いると, 以下のようになる. ただし, st, su は t, u が指定されている s の領域を示し, s = st + su である.∫
v
T : (u ⊗∇x) dv =
∫st
t · u ds +
∫su
n · T · u ds +
∫v
ρg · udv (20.7)
ここで, 一価連続で su 上で w = 0 となる w 全体の集合をW とする. このとき u ∈ U , ∀w ∈ W に対して u + w ∈ U である. 平衡状態にある Cauchy 応力をT として, 下式が成立する.∫
v
T : (u ⊗∇x) dv =
∫st
t · u ds +
∫su
n · T · u ds +
∫v
ρg · udv (20.8)
∫v
T : {(u+w)⊗∇x}dv =
∫st
t·(u+w)ds+
∫su
n·T ·uds+
∫v
ρg·(u+w)dv (20.9)
平衡状態にあるCauchy 応力を T として, 下式が成立する.∫v
T : (u ⊗∇x) dv =
∫st
t · u ds +
∫su
n · T · u ds +
∫v
ρg · udv (20.10)

20.2. 境界値問題の定式化 227∫v
T : {(u+w)⊗∇x}dv =
∫st
t·(u+w)ds+
∫su
n·T ·uds+
∫v
ρg·(u+w)dv (20.11)
両式を両辺それぞれ引くことにより下式が得られる.∫v
T : (w ⊗∇x) dv =
∫st
t · w ds +
∫v
ρg · wdv (20.12)
これは以下のように表すことができる.∫v
T : δA(L) dv =
∫δv
t · w ds +
∫v
ρg · w dv (20.13)
ただし δA(L) は, w ∈ W から導かれる Almange ひずみの線形成分である.
δA(L)ij =1
2
(∂wi
∂xj+
∂wj
∂xi
)(20.14)
また,この式の参照配置を変更することにより,下式が得られる.∫V
S : δE dv =
∫δV
t · w dS +
∫V
ρg · w dV (20.15)
∫v
T : δALdv
∫V
S : δEdV (20.16)∫V
dV =
∫v
1
Jdv (20.17)
T =1
JF · S · F T → Sij = JF−1
im TmnF−1jn (20.18)
δE = F T δALF
(F T δALF )ij = FkiδALklFlj
=∂xk
∂Xi
{1
2
(∂δuk
∂xl+
∂δul
∂xk
)}∂xl
∂Xj
=1
2
(∂xk
∂Xi
∂δuk
∂xl
∂xl
∂Xj
+∂xk
∂Xi
∂δul
∂xk
∂xl
∂Xj
)=
1
2
(∂xk
∂Xi
∂δuk
∂Xj
+∂xl
∂Xi
∂δul
∂Xj
)=
1
2
{(δki
∂uk
∂Xi
)∂δuk
∂Xj+
∂δul
∂Xj
(δli
∂uk
∂Xi
)}=
1
2
(∂δui
∂Xj+
∂δuj
∂Xi+
∂δuk
∂Xi
∂uk
∂Xj+
∂uk
∂Xi
∂δuk
∂Xj
)= δEij (20.19)

228 第 20章 幾何学非線形を考慮した境界値問題とは?
∫V
S : δEdV =
∫v
(F T δALF ) : (JF−1 · T · F−T )1
Jdv
=
∫v
J(FkiδALklFlj)(F−1im TmnF−1
jn )1
Jdv
=
∫v
δkmδlnALklTmndv
=
∫v
T : δALdv (20.20)
20.3 非線形問題線形弾性体の場合 ∫
TijδEijdV (20.21)
を離散化して剛性方程式が得られた.
TijδEij = {δE}{T}= {δu}T [B][D][B]{u} (20.22)
ただし,{δE} = [B]{δu} (20.23)
{T} = [D]{E} = [D][B]{u} (20.24)
一般的な場合(つまり非線形の場合)はどうなるのか∫SijδEijdV (20.25)
SijδEij = {δE}{S}= {δu}T [B]{S} (20.26)
{δE} は {δu} に対して線形(ただし,uの関数)なので,マトリックス表示できるが,{S} は {E} に対して線形であるとは限らないし,そもそも {E} は変位u に対して線形ではない.
E =1
2
(∂ui
∂Xj+
∂uj
∂Xi+
∂uk
∂Xi
∂uk
∂Xj
)ei ⊗ ej (20.27)
δE =1
2
(∂δui
∂Xj+
∂δuj
∂Xi+
∂δuk
∂Xi
∂uk
∂Xj+
∂uk
∂Xi
∂δuk
∂Xj
)(20.28)

229
第21章 非線形解法の代表Newton-Raphson法
非線形有限要素法の基礎式である,幾何学的非線形性を厳密に考慮した仮想仕事式(Cauchyの第一運動法則の弱形式)は,たとえ線形有限要素法のプログラムを理解していても,応力の種類もCauchy応力を使うものや,第 2Piola-Kirchhoff応力を使うものがあったり,速度型と呼ばれるものもあるなど,一見しただけでは,どのように非線形有限要素法のプログラムに結びつくのか想像しがたいように思われる.しかしながら,幸いにして,現在では標準となっている手法,即ち増分解析とNewton-Raphson法を用いれば,線形版のプログラムにコード全体の 3割増程度の拡張により,非線形版を作成することができる.線形版のプログラムは,剛性マトリックスの作成と,連立一次方程式の救解という2つの手続きから成り立っているが,剛性マトリックスに必要な拡張を行ない,2つの手続きの外側に 2つのループを追加する.最外側が,増分解析のループでその内側に Newton-Raphson
法のループがある.ただし,どちらも行列ベクトル積でのループのように何回繰り返したら終了というタイプのループではなく,計算が収束すれば,途中でループから抜けるなど条件分岐を含み,単純ではない.ここではひとまず,有限要素法とは切り離して,増分解析とNewton-Raphson法の基礎を解説し,サンプルプログラムを作成するが,必要に応じて有限要素法との関連を述べる.そのため,一般的な数値解析法の参考書とは異なる説明になっているところもある.
21.1 1次元の場合例題 1√
2,√
3,√
4,…,√
10を順に求めるプログラムを作成する.具体的には,y = x2
として,y = 2, 3,…, 10を満たす x > 0を順次求めていく.実は,幾何学的非線形性を厳密に考慮した仮想仕事式を有限要素離散化して得られる.非線形の連立方程式(以下では平衡方程式と呼ぶ)も,外力などの境界条件によって定まる aに対して,平衡方程式 f(x)が

230 第 21章 非線形解法の代表 Newton-Raphson法
f(x) = a (21.1)
を満たすような xを求めるという形式の問題である.この aに対する解を直接求めることができる場合もあるが,f(x)の非線形性が強いと,aに対する解を求めるために,たとえば,aを 10等分して,0 < a1 < a2 <… < a10 = aとして,まずは a1に対する解 x1を求め,次にこれをもとに,a2に対する解 x2を求め,順に x9
をもとに a10(= a)に対する解 xを求める.このように与えられた aに対して中間的な aiに対して順に解を求めるのが増分解析の基本である.
1.1収束判定実際に解を求めるプロセスの説明をする前に,近似解の意味について考えてみ
る.まず,近似的であれ何であれ,解の候補 x(i)が,解としてふさわしいかどうか判定する必要がある.このために,下式に基づき,残差 rを定義する.
r = a − f(x(i)
)(21.2)
当然ながら,正解xは,r = 0となる.近似解x(i)では,x(i) � xであれば,|r| � 1
となるはずである.ここで注意すべきは,計算機で計算する限り,r = 0となる保証がないということである.例えば,a =
√2と,値を代入したところで,aに無
理数としての√
2を代入できるわけではない.あくまで,√
2を有限桁数の浮動小数点で近似したものが代入されているだけで,OSやコンパイラが変われば,その値自体も異なる場合もある.そのため,何らかのアルゴリズムで,いかに正確に√
2の近似解を求めたとしても,計算機の内部表現の意味での√
2に,bit単位で一致し,r = 0となることは保証されないのである.そのため通常は,εを十分小さい正数 (10−8~10−10など)として,|r| < ε が満たされれたら,x(i)は xを十分な精度で近似しているとみなす.当然ながら,εは小さいほど近似の精度が上がることが期待できるが,倍精度の実数でも約 15桁の有効数字しかないので,ε = 10−100
としも意味が無い.また,ε = 10−6~10−8 程度でも,同じ基準で判定しても後続の計算で著しく反復回数が増加するなどの困難を生じることなく,解き進むことができるのであれば,実質的に十分な精度の解を求められていると考えられる場合は多い.このように,ある与えられた εに対して,|r| < ε を満たすかどうか判定することを収束判定と呼び,得られた近似解 x(i)を収束解と呼ぶ.
1.2モンテカルロ法残差が十分小さい近似解 x(i)を収束解とするのであれば、最も単純なアルゴリ
ズムとしてΔxを経験などを元に設定して
x(i)k+1 = xk + Δx・i (21.3)

21.1. 1次元の場合 231
のように k段階目の収束解 xkを元に k + 1段階目の収束解 xk+1を求めるというアルゴリズムを考えることができる。あるいは a(i)を適当な乱数として、
x(i)k+1 = xk + Δx・a(i) (21.4)
としてもよい。このような方法であっても、反復回数を十分大きくとればそれなりの近似解を得ることができる。後者の乱数を用いるアルゴリズムは特にモンテカルロ法と呼ばれている。後述のNewton-Raphson法と比較して長所は、どのような f(x)であっても、即ちたとえ連続な関数でなく、ロジックによって離散的にf(x)の値が得られるような場合でも f(x)さえ計算できれば収束解を得ることができることにある。短所は、もちろん実際に実行してみるとわかるように一般に非常に時間がかかることである。
2.Newton-Raphson法もし f ′(x)を求めることができればモンテカルロ法よりはるかに効率よく解を
求める方法として、Newton-Raphson法が知られており、非線形有限要素法でもNewton-Raphson法や、これを元にした修正Newton法や、割線法がよく用いられている。 微分可能な関数は微小区間 [x, x + dx]の間では線形とみなすことができるというのが微分の基本であるが、有限な、即ち微小ではないΔxについてもある程度小さければ区間 [x, x + Δx]において f(x)はそれほど線形から外れることはない。そこで与えられた a1に対する f(x) = a1の近似解 x1 が既に求められているとき、f(x) = a2に対する近似解 x2の題1次予測として x
(1)2 を以下のように求める。
f ′(x1)Δx(1)1 = a2 − f(x1) (21.5)
→ Δx(1)1 =
1
f ′(x1)(a2 − f(x1)) (21.6)
x(1)2 = x1 + Δx
(1)1 (21.7)

232 第 21章 非線形解法の代表 Newton-Raphson法
a1a1
a2a2
x1x1 x(1)2x
(1)2 x
(2)2
Δx(1)1
Δx(2)2
f(x(1)2 )f(x
(1)2 )
f(x(2)2 )
a2 − f(x1)
a2 − f(x(1)2 )
このときの残差 r(1)2 は以下のように求められる。
r(1)2 = a2 − f(x
(1)2 ) (21.8)
もし、r(1)2 が十分に小さければこれで計算を終えることも不可能ではないが、多く
の場合は、十分に解が収束している。即ち、これ以降計算を行ったときに rが減少するかどうか定かでないので、次式に従い第2段階での近似 x
(2)2 を求める。
f ′(x(1)2 )Δx
(2)2 = a2 − f(x
(1)2 ) (21.9)
→ Δx(2)2 =
1
f ′(x(1)2 )
(a2 − f(x(1)2 )) (21.10)
x(2)2 = x
(1)2 + Δx
(2)2 (21.11)
このプロセスを図示する。これ以降順に以下のように近似解x(i)2 を元に x
(i+1)2 を求
める。
f ′(x(i)2 )Δx
(i+1)2 = a2 − f(x
(i)2 ) (21.12)
→ Δx(i+1)2 =
1
f ′(x(i)2 )
(a2 − f(x(i)2 )) (21.13)
x(i+1)2 = x
(i)2 + Δx
(i+1)2 (21.14)
r(i+1)2 = a2 − f(x
(i+1)2 ) (21.15)
|r(i+1)2 | < εとなれば反復計算を終了することになる。

21.1. 1次元の場合 233
以下に説明したNewton-Raphson法により√
2の値を手計算で求めてみよう。まず y = x2を満たす初期値として、x1 = 1, y1 = 1からスタートすることにしよう。実は、x = 0, y = 0からスタートすることが多い。これは平衡方程式においては、外力が 0なら無変形ということに対応する自明な解だからである。たまたま、今回の問題は f ′(0) = 0となり、Newton-Raphson法の最初で求積できないので、例外的に x �= 0の初期値を採用している。ただし、実際の物理現象でも何らかの都合で f ′(0) = 0となることがあり、この種の工夫が必要になることは少なくない。
f(x) = x2,df(x)
dx= 2x (21.16)
a2 = 2, x1 = 2を代入して、
df(1)
dx= 2, 2Δx
(1)1 = 2 − 1 (21.17)
→ Δx(1)1 =
1
2(21.18)
x(1)2 = x1 + Δx
(1)1 = 1 +
1
2=
3
2= 1.5 (21.19)
a2 = 2, x(1)2 = 3
2を代入して、
df(32)
dx= 3, f(
3
2) =
9
4, 3Δx
(2)2 = 2 − 9
4(21.20)
→ Δx(2)2 = − 1
12(21.21)
x(2)2 = x
(1)2 + Δx
(2)2 =
3
2− 1
12=
17
12= 1.4166 · · · (21.22)
a2 = 2, x(2)2 = 17
12を代入して、
df(1712
)
dx=
17
6, f(
17
12) =
289
144,
17
6Δx
(3)2 = 2 − 289
144(21.23)
→ Δx(3)2 = − 1
408(21.24)
x(3)2 = x
(2)2 + Δx
(3)2 =
17
12− 1
408=
577
408= 1.4142156 · · · (21.25)
a2 = 2, x(3)2 = 577
408を代入して、
df(577408
)
dx=
577
204, f(
577
408) =
577 · 577
408 · 408,
577
204Δx
(4)2 = 2 − 577 · 577
408 · 408(21.26)

234 第 21章 非線形解法の代表 Newton-Raphson法
→ Δx(4)2 = − 1
470832(21.27)
x(4)2 = x
(3)2 + Δx
(4)2 =
577
408− 1
470832=
665857
470832= 1.41421356237 · · · (21.28)
反復数 4回でも精度の高い近似解が得られていることが分かる。このプロセスをループで表してみよう。
do k = 2, 10
ak = k
do i = 1, 100df
(i−1)k
dxΔx
(i)k = ak − f(x
(i−1)k ) → Δx
(i)k
x(i)k = x
(i−1)k + Δx
(i)k
r(i)k = ak − f(x
(i)k )
if |r(i)k | < ε
convergence flag = 1
exit loop
else
convergence flag = 0
end if
end
if convergence flag = 1
write x
else
write ” not converged ”
exit
end if
end
実際のプログラムではループカウンターに i、kなどよく使われる文字を使うと途中で紛れてbugになる可能性があるので、kの代わりに iincre(index of increment)、iの代わりに iiter(index of interation)を用いることにする。また、ループの最大値もこれにあわせ、nincre、niterとすれば、データファイルからの読み込みに対応できる。このサンプルプログラムを示す。1dim.f ところで、f(x)が一次関数、たとえば f(x) = cx(cは定数)であったら、

21.2. 2次元の場合 235
このプロセスはどうなるであろうか。 dfdx
= cなので
cΔx = a − cxk Δx =1
c(a − cxk) (21.29)
x(1)k+1 = xk +
1
c(a − cxk) =
a
c(21.30)
r(1)k+1 = a − c
a
c= 0 (21.31)
となるので、どのような aを与えても反復1回で必ず収束する。これを線形有限要素法にあてはめると、定数 cにあたるものが剛性マトリックスKで f(x)はKu
にあたる。つまり、KΔu = f − Ku (21.32)
という式を u = 0という条件で解いた、と考えることが出来る。非線形の有限要素法であれば、f(x)にあたるものは、平衡方程式の左辺である
Q(u) = f (21.33)
即ち、∂Q∂uを求めることが出来れば、ここで説明したNewton-Raphson法を適用出
来る。そのために、2次元以上の場合のNewton-Raphson法について説明する。
21.2 2次元の場合アイソパラメトリック 4角形要素の場合、r1, r2 が与えられると対応する x1, x2
は
xi = N (1)(r1, r2)x(1)i + N (2)(r1, r2)x
(2)i + N (3)(r1, r2)x
(3)i + N (4)(r1, r2)x
(4)i (21.34)
によって計算することができるが、逆に x1, x2 が与えられたとき、対応する r1, r2
は直接求めることができない。Newton-Raphson 法を 2次元に拡張して、これを求める方法を考えてみよう。まず最初に微小量同士の関係を導いてみよう。これは変数変換のときに導入し
た Jacobi行列そのものである。
dx1 =∂x1
∂r1dr1 +
∂x1
∂r2dr2 (21.35)
dx2 =∂x2
∂r1
dr1 +∂x2
∂r2
dr2 (21.36)

236 第 21章 非線形解法の代表 Newton-Raphson法
マトリックス表示すれば、{dx1
dx2
}=
[∂x1
∂r1
∂x1
∂r2∂x2
∂r1
∂x2
∂r2
]{dr1
dr2
}(21.37)
x1, x2 の初期値として、r1 = 0, r2 = 0 を代入して得られる重心の座標 (xG1 , xG
2 )
を用いることにしよう。x1, x2 と (xG1 , xG
2 ) の差を
Δx<1>1 = x1 − xG
1 (21.38)
Δx<1>2 = x2 − xG
2 (21.39)
とすれば、x1, x2 と (xG1 , xG
2 ) がそれほど離れていないすなわち (Δx1, Δx2) がそれほど大きくなければ、下式により (Δr1, Δr2)を求めれば、それほど大きな量にならないはずである。 {
Δr1
Δr2
}=
[∂x1
∂r1
∂x1
∂r2∂x2
∂r1
∂x2
∂r2
]−1{Δx1
Δx2
}(21.40)
この Δr1, Δr2 を用い
r<1>1 = 0 + Δr1 (21.41)
r<1>2 = 0 + Δr1 (21.42)
が得られる。この (r<1>1 , r<1>
2 )を代入すれば重心よりも (x1, x2)のよい近似になっていることが期待できる。すなわち
||(x1 − xG1 , x1 − xG
1 )|| > ||(x1 − x<1>1 , x1 − x<1>
1 )|| (21.43)
以後これを繰り返して収束すれば、目的とする r1, r2 の近似解を求められたことになる。

237
第22章 弱形式のマトリックス表示
22.1 境界値問題の弱形式境界値問題は弱形式にすると∫
v
T : δA(L) dv =
∫∂v
t · w ds +
∫v
ρg · w dv (22.1)
ただし δA(L) は, w ∈ W から導かれる Almange ひずみの線形成分である.
δA(L)ij =1
2
(∂wi
∂xj+
∂wj
∂xi
)(22.2)
また,基準時刻を変形前の t0 にとって,書き直すと下式のようになる.∫V
S : δE dV =
∫∂V
t · w dS +
∫V
ρg · w dV (22.3)
この両者の間には,本質的な差はなく単に基準配置の違いのみである.幾何学非線形性を考慮した有限要素法ではこのどちらかの式を離散化して解く
ことになる前者を updated Lagrange 法,後者を Total Lagrange 法というどちらを選択するかは,構成式の形を考慮して効率の観点から行うここでは,まず Total Lagrange 法について説明する.
22.2 弱形式のマトリクス表示領域 Ω を要素に分割する. これを以下のように表す.
Ω =∑
e
Ωe (22.4)

238 第 22章 弱形式のマトリックス表示
これに伴い, 領域積分, 境界積分はそれぞれ次のようになる.∫Ω
dΩ =∑
e
∫Ωe
dΩ (22.5)∫∂Ω
dS =∑
e
∫∂Ωe
dS (22.6)
各要素での変位 u の補間関数を N (i) とすると, 各要素内の ui は以下のように離散化される.
ui = N (n)u(n)i (22.7)
ただし, u(i)i は節点変位で, (n) はその要素の節点数についての総和を表すものと
する.
また,座標についても同じ補間関数を用いて離散化する.
Xi = N (n)X(n)i (22.8)
22.3 外力1
外力の仮想仕事を δR とおく. 即ち
δR =
∫∂Ω
δuktk dS +
∫Ω
ρ0δukgk dΩ (22.9)
とする.
ここで
{δu} = {δu1, δu2, δu3}T (22.10)
{t} = {t1, t2, t3}T (22.11)
{g} = {g1, g2, g3}T (22.12)
を定義すると,
δR =
∫∂Ω
{δu}T{t} dS +
∫Ω
ρ0{δu}T{g} dΩ
=∑
e
[∫∂Ωe
{δu}T{t} dS +
∫Ωe
ρ0{δu}T{g} dΩ
](22.13)
と表すことができる.

22.4. 内力ベクトル 1 239
形状関数のマトリックス表示
[Ni] =
⎡⎢⎣N (i) 0 0
0 N (i) 0
0 0 N (i)
⎤⎥⎦ (22.14)
[N ] = [[N1] [N2] · · · [Nn]] (22.15)
として, 3 行 3n 列のマトリクス [N ] を定義する.
節点仮想変位ベクトル {δu(n)} を
{δu(n)} ={
δu(1)1 δu
(1)2 δu
(1)3 · · · δu(n)
1 δu(n)2 δu
(n)3
}T
(22.16)
とすると,
{δu} = [N ]{δu(n)
}(22.17)
なので,
δR =∑
e
[{δu(n)
}T[∫
∂Ωe
[N ]T{t} dS +
∫Ωe
ρ0[N ]T{g} dΩ
]](22.18)
22.4 内力ベクトル 1
弱形式の左辺のマトリックス表示を行う∫Ω
δEijSij dΩ = δR (22.19)
δEij , Sij が i , j に関して対称であることから,
δEijSij = δE11S11 + δE22S22 + δE33S33
+ 2δE12S12 + 2δE23S23 + 2δE31S31
= (δE11 δE22 δE33 2δE12 2δE23 2δE31) (S11 S22 S33 S12 S23 S31)T
(22.20)
記述の簡略化のために, 歪みの変分と応力をベクトル表示したものを定義しておく.
{δE} = {δE11 δE22 δE33 2δE12 2δE23 2δE31}T (22.21)
{S} = {S11 S22 S33 S12 S23 S31}T (22.22)

240 第 22章 弱形式のマトリックス表示
これらに基づいて弱形式の式を要素分割すると,∫Ω
δEijSij dΩ =
∫Ω
{δE}T{S} dΩ
=∑
e
∫Ωe
{δE}T{S} dΩ = δR
δEij を成分表示すると
δEij =1
2
(∂δui
∂Xj
+∂δuj
∂Xi
+∂δuk
∂Xi
∂uk
∂Xj
+∂uk
∂Xi
∂δuk
∂Xj
)(22.23)
これより,
[Z1] ≡⎡⎢⎢⎢⎢⎢⎢⎢⎣
1 + ∂u1∂X1
0 0 ∂u2∂X1
0 0 ∂u3∂X1
0 00 ∂u1
∂X20 0 1 + ∂u2
∂X20 0 ∂u3
∂X20
0 0 ∂u1∂X3
0 0 ∂u2∂X3
0 0 1 + ∂u3∂X3
∂u1∂X2
1 + ∂u1∂X1
0 1 + ∂u2∂X2
∂u2∂X1
0 ∂u3∂X2
∂u3∂X1
00 ∂u1
∂X3
∂u1∂X2
0 ∂u2∂X3
1 + ∂u2∂X2
0 1 + ∂u3∂X3
∂u3∂X2
∂u1∂X3
0 1 + ∂u1∂X1
∂u2∂X3
0 ∂u2∂X1
1 + ∂u3∂X3
0 ∂u3∂X1
⎤⎥⎥⎥⎥⎥⎥⎥⎦(22.24){
∂δu
∂X
}≡{
∂δu1
∂X1
∂δu1
∂X2
∂δu1
∂X3
∂δu2
∂X1
∂δu2
∂X2
∂δu2
∂X3
∂δu3
∂X1
∂δu3
∂X2
∂δu3
∂X3
}T
(22.25)
と定義して,
{δE} = [Z1]
{∂δu
∂X
}(22.26)
となる.
このマトリックスに現れる ∂ui
∂Xjについては,下式に従い求める
∂ui
∂Xj=
∂N (n)
∂Xju
(n)i (22.27)
同様に ∂δui
∂Xjについては,
∂δui
∂Xj=
∂N (n)
∂Xjδu
(n)i (22.28)

22.4. 内力ベクトル 1 241
これを用いて{
∂δu
∂X
}を節点変位で表すと
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
∂δu1
∂X1∂δu1
∂X2∂δu1
∂X3∂δu2
∂X1∂δu2
∂X2∂δu2
∂X3∂δu3
∂X1∂δu3
∂X2∂δu3
∂X3
⎫⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎭
=
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
∂N(1)
∂X1
∂N(n)
∂X1∂N(1)
∂X2
∂N(n)
∂X2∂N(1)
∂X3
∂N(n)
∂X3∂N(1)
∂X1
∂N(n)
∂X1∂N(1)
∂X2· · · ∂N(n)
∂X2∂N(1)
∂X3
∂N(n)
∂X3∂N(1)
∂X1
∂N(n)
∂X1∂N(1)
∂X2
∂N(n)
∂X2∂N(1)
∂X3
∂N(n)
∂X3
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
δu(1)1
δu(1)2
δu(1)3...
δu(n)1
δu(n)2
δu(n)3
⎫⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎭(22.29)
となる.
上式中の 9 行 3n 列のマトリクスを [Z2], つまり{∂δu
∂X
}= [Z2]{δu(n)} (22.30)
となるように定義する[B] を
[B] ≡ [Z1][Z2] (22.31)
と定義する最終的に
{δE} = [B]{δu(n)} (22.32)
と表すことができる.
[B(n)] ≡⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
(1 + ∂u1
∂X1
)∂N(n)
∂X1
∂u2
∂X1
∂N(n)
∂X1
∂u3
∂X1
∂N(n)
∂X1
∂u1
∂X2
∂N(n)
∂X2
(1 + ∂u1
∂X2
)∂N(n)
∂X2
∂u3
∂X2
∂N(n)
∂X2
∂u1
∂X3
∂N(n)
∂X3
∂u2
∂X3
∂N(n)
∂X3
(1 + ∂u3
∂X3
)∂N(n)
∂X3
∂u1
∂X2
∂N(n)
∂X2+(1 + ∂u1
∂X1
)∂N(n)
∂X2
(1 + ∂u2
∂X2
)∂N(n)
∂X1+ ∂u2
∂X1
∂N(n)
∂X2
∂u3
∂X2
∂N(n)
∂X1+ ∂u3
∂X1
∂N(n)
∂X2
∂u1
∂X3
∂N(n)
∂X2+ ∂u1
∂X2
∂N(n)
∂X3
∂u2
∂X3
∂N(n)
∂X2+(1 + ∂u2
∂X2
)∂N(n)
∂X3
(1 + ∂u3
∂X3
)∂N(n)
∂X2+ ∂u3
∂X2
∂N(n)
∂X3(1 + ∂u1
∂X1
)∂N(n)
∂X3+ ∂u1
∂X3
∂N(n)
∂X1
∂u2
∂X1
∂N(n)
∂X3+ ∂u2
∂X3
∂N(n)
∂X1
∂u3
∂X1
∂N(n)
∂X3+(1 + ∂u3
∂X3
)∂N(n)
∂X1
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦(22.33)

242 第 22章 弱形式のマトリックス表示
として 6 行 3 列のマトリクス [B(n)] を定義すると,
[B] =[[B(1)] · · · [B(n)]
](22.34)
となる.
以上より, ∑e
∫Ωe
{δE}{S} dΩ =∑
e
[{δu(n)}T
∫Ωe
[B]T{S} dΩ
](22.35)
が得られる.
22.5 弱形式のマトリクス表示これらをまとめると,total Lagrange 法による弱形式の式は以下のように要素
分割しマトリクス表示しできる.∑e
[{δu(n)}T
∫Ωe
[B]T {S}dΩ
]=∑
e
[{δu(n)}T
[∫∂Ωe
[N ]T {t}dS +∫
Ωe
ρ0[N ]T {g}dΩ
]](22.36)
ここで,
Q =
∫Ωe
[B]T{S} dΩ (22.37)
F =
∫∂Ωe
[N ]T{t} dS +
∫Ωe
ρ0[N ]T{g} dΩ (22.38)
u ={u(n)
}(22.39)
とすると, ∑e
[δuh
T (Q(uh) − F )]
= 0 (22.40)
即ち, 弱形式化した境界値問題は
find uh ∈ V h such that∑e
[δuh
T (Q(uh) − F )]
= 0 (22.41)
for ∀δuh ∈ V h
と置き換え, Newton-Raphson 法で解くことができる.

22.6. 接線剛性マトリクス 1 243
22.6 接線剛性マトリクス 1
Newton-Raphson 法では, 接線剛性マトリクス K =∂Q
∂uを使用するが,
dQ
dt=
∂Q
∂u
du
dt
= K · u (22.42)
の関係より, 弱形式の左辺を速度型にしたもの(すなわち速度型の仮想仕事式)をマトリクス表示することによって, 接線剛性マトリクスを求めることができる.
弱形式の左辺を速度型にすると(∫Ω
SijδEijdV
)·=
∫Ω
SijδEij + SijδEijdΩ (22.43)
構成式が以下のように与えられるとする
Sij = CijklEkl (22.44)
Cijkl が一定とするとSij = CijklEkl (22.45)
例:Hooke 則Sij = λ(trEij)δij + 2μEij (22.46)
Cijkl = λδklδij + 2μδkiδjl (22.47)
これを代入すると∫Ω
SijδEij + SijδEijdΩ
=
∫Ω
CijklEklδEij + SijδEijdΩ
=
∫Ω
CijklEklδEij + Sij1
2
(δFki Fkj + Fki δFkj
)dΩ
=
∫Ω
CijklEklδEij + Sij
(δFki Fkj
)dΩ
(22.48)
Sij は, Ekl が k , l に関して対称であることから
Sij = Cij 11E11 + Cij 22E22 + Cij 33E33
+1
2(Cij 12 + Cij 21) 2E12 +
1
2(Cij 23 + Cij 32) 2E23 +
1
2(Cij 31 + Cij 13) 2E31
(22.49)

244 第 22章 弱形式のマトリックス表示
ここで
Cij kl ≡1
2(Cij kl + Cij lk) (22.50)
を定義すると, S は次のようにマトリクス表示ができる.⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎩
S11
S22
S33
S12
S23
S31
⎫⎪⎪⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎪⎪⎭=
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎣
C11 11 C11 22 C11 33 C11 12 C11 23 C11 31
C22 11 C22 22 C22 33 C22 12 C22 23 C22 31
C33 11 C33 22 C33 33 C33 12 C33 23 C33 31
C12 11 C12 22 C12 33 C12 12 C12 23 C12 31
C23 11 C23 22 C23 33 C23 12 C23 23 C23 31
C31 11 C31 22 C31 33 C31 12 C31 23 C31 31
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎦
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎩
E11
E22
E33
2E12
2E23
2E31
⎫⎪⎪⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎪⎪⎭(22.51)
この Cijkl を並べた 6 行 6 列のマトリクスを [D] とする. Cijkl は, ij , kl について対称であるから, [D] は対称である. また, 記述の簡略化のために,
{S} = {S11 S22 S33 S12 S23 S31}T (22.52)
{E} ={
E11 E22 E33 2E12 2E23 2E31
}T
(22.53)
を定義すると, ∫Ω
δEij Sij dΩ
=
∫Ω
δEij CijklEkl dΩ
=
∫Ω
{δE}T [D]{E} dΩ (22.54)
さらに {u(n)
}≡{u
(1)1 u
(1)2 u
(1)3 · · · u(n)
1 u(n)2 u
(n)3
}T
(22.55)
を定義すると, {E}
= [B]{u(n)
}(22.56)
と表せる.
Eij =1
2
(∂ui
∂Xj+
∂uj
∂Xi+
∂uk
∂Xi
∂uk
∂Xj+
∂uk
∂Xi
∂uk
∂Xj
)(22.57)
以上より, 弱形式の第 1 項は∫Ω
δEij Sij dΩ =∑
e
[{δu(n)
}T∫
Ωe
[B]T [D][B] dΩ{u(n)
}](22.58)

22.6. 接線剛性マトリクス 1 245
となる.
剛性マトリックスのこの項を「初期変位項」などと呼ぶ次に, 弱形式の第2項 δFki Sij Fkj について考える.
総和規約を展開して,強引にまとめると,以下のようにマトリックスを用いて
整理することができる.
δFki Sij Fkj = {δF11 δF12 δF13}
⎡⎢⎣ S11 S12 S13
S21 S22 S23
S31 S32 S33
⎤⎥⎦⎧⎪⎨⎪⎩
F11
F12
F13
⎫⎪⎬⎪⎭+{δF21 δF22 δF23}
⎡⎢⎣ S11 S12 S13
S21 S22 S23
S31 S32 S33
⎤⎥⎦⎧⎪⎨⎪⎩
F21
F22
F23
⎫⎪⎬⎪⎭+{δF31 δF32 δF33}
⎡⎢⎣ S11 S12 S13
S21 S22 S23
S31 S32 S33
⎤⎥⎦⎧⎪⎨⎪⎩
F31
F32
F33
⎫⎪⎬⎪⎭(22.59)
ここで,
[σ] =
⎡⎢⎣ S11 S12 S13
S21 S22 S23
S31 S32 S33
⎤⎥⎦ (22.60)
[Σ] =
⎡⎢⎣ [σ]
[σ]
[σ]
⎤⎥⎦ (22.61)
{δF} = {δF11 δF12 δF13 δF21 δF22 δF23 δF31 δF32 δF33}T (22.62)
{F} = {F11 F12 F13 F21 F22 F23 F31 F32 F33}T (22.63)
を定義すると,
δFki SijFkj = {δF}T [Σ]{F} (22.64)

246 第 22章 弱形式のマトリックス表示
さらに,
δFij =∂δxi
∂Xj=
∂δui
∂Xj(22.65)
Fij =∂xi
∂Xj=
∂ui
∂Xj(22.66)
より, 先の [Z2] を用いることにより
{δF} =
{∂δu
∂X
}= [Z2]
{δu(n)
}(22.67)
{F} = [Z2]{u(n)
}(22.68)
これらより,
δFki SijFkj ={δu(n)
}T[Z2]
T [Σ][Z2]{u(n)
}(22.69)
T [Z2]T [Σ][Z2] について計算すると,
[Aij ] =
{∂N (i)
∂X1
∂N (i)
∂X2
∂N (i)
∂X3
}⎡⎢⎣ S11 S12 S13
S21 S22 S23
S31 S22 S33
⎤⎥⎦⎧⎪⎨⎪⎩
∂N(j)
∂X1∂N(j)
∂X2∂N(j)
∂X3
⎫⎪⎬⎪⎭⎡⎢⎣ 1
1
1
⎤⎥⎦(22.70)
[A] =
⎡⎢⎢⎢⎢⎣[A11] [A12] . . . [A1n]
[A21]. . .
......
. . ....
[An1] . . . . . . [Ann]
⎤⎥⎥⎥⎥⎦ (22.71)
を定義すると,
[Z2]T [Σ][Z2] = [A] (22.72)
以上より, 速度型弱形式の第 2 項は∫Ω
δFki SijFkj dΩ =∑
e
[{δu(n)
}T∫
Ωe
[A] dΩ{u(n)
}](22.73)
となる.
剛性マトリックスのこの項を「初期応力項」などと呼ぶ.以上をまとめると,速度型の仮想仕事式は∫
Ω
δEij Sij dΩ +
∫Ω
δFki SijFkj dΩ
=∑
e
[{δu(n)
}T∫
Ωe
([B]T [D][B] + [A]
)dΩ
{u(n)
}](22.74)

22.6. 接線剛性マトリクス 1 247
のようにマトリクス表示ができる.
すなわち,接線剛性マトリックスは以下のように表される∑e
∫Ωe
([B]T [D][B] + [A]
)dΩ (22.75)


![Lecture lagrange[1]](https://img.pdfslide.tips/doc/110x75/5566c67fd8b42aac288b51d5/lecture-lagrange1.jpg)