Embed Size (px)
DESCRIPTION
2013-2014 学年第二学期第一讲. 机器人导论. 王国利 信息科学与技术学院 中山大学. 课程安排. 时间和学时安排 - 课时 : 18 X 2 学时 - 讲课 : 13 X 2 学时 ( 周三 1-2 节 , C302 ) - 实验 : 3 X 2 学时 ( 第 10 、 14 和 18 周 ) - 课件 : http://human-robot.sysu.edu.cn/course/robot13.htm - 答疑 : [email protected] 成绩评定 - 平时作业 : 40% - PowerPoint PPT Presentation
Citation preview
机器人导论
王国利信息科学与技术学院
中山大学
2013-2014 学年第二学期第一讲
课程安排 时间和学时安排 - 课时 : 18 X 2 学时 - 讲课 : 13 X 2 学时 ( 周三 1-2 节 , C302 ) - 实验 : 3 X 2 学时 ( 第 10 、 14 和 18 周 )
- 课件 : http://human-robot.sysu.edu.cn/course/robot13.htm
- 答疑 : [email protected]
成绩评定 - 平时作业 : 40%
- 课程实践 : 60%
课程安排与课件配套的教材
Intelligent Robotics and Autonomous Agents series
The MIT Press
Massachusetts Institute of Technology
Cambridge, Massachusetts 02142
ISBN 0-262-19502-X
自主移动机器人导论李仁厚译
西安交通大学出版社ISBN 7-5605-2161-4/TP.432
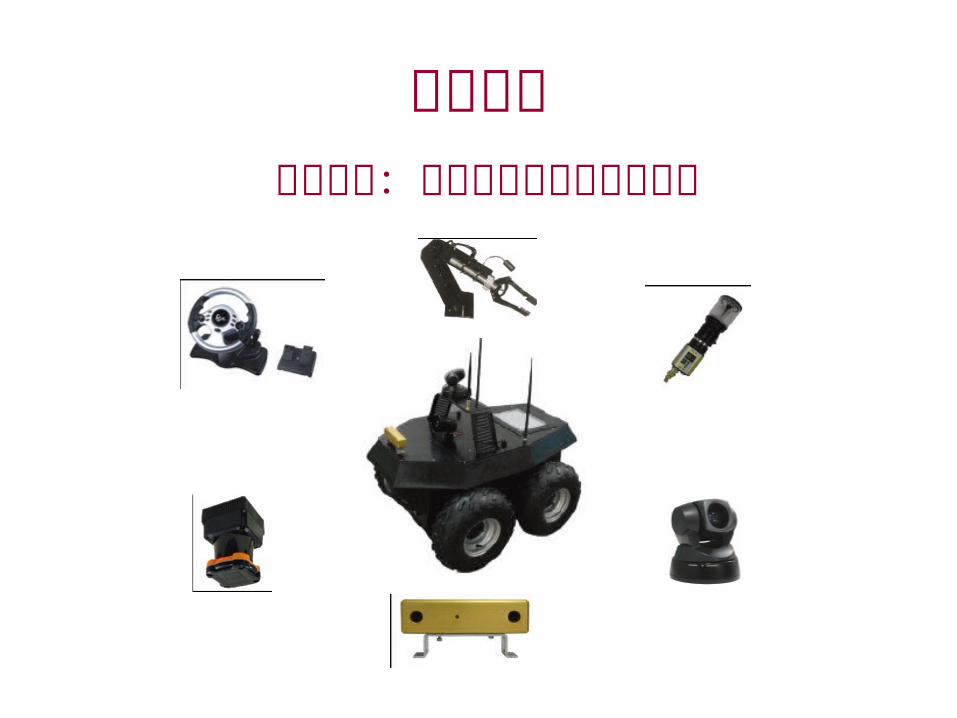
课程安排课程假定:你已具备移动平台的知识
课程安排 移动机器人涉及的三个关键问题
– 我在哪?– 我去哪 ?– 我怎么去那 ?
为了回答上述问题 机器人需要
– 拥有环境的模型 ( 提供 或者 自主创建 )– 能够感知和分析环境– 能在环境中自我定位 – 规划并执行运动
该课程重点关注移动机器人的定位与导航问题– 包括感知、定位、规划及运动控制内容
?
课程安排 主要内容
绪论 (第一讲) 移动概论 (第一、二讲) 运动学(第四至六讲) 感知(第七至十讲) 定位(第十一至十八讲)6. 实验(三次)7. 作业(四次)
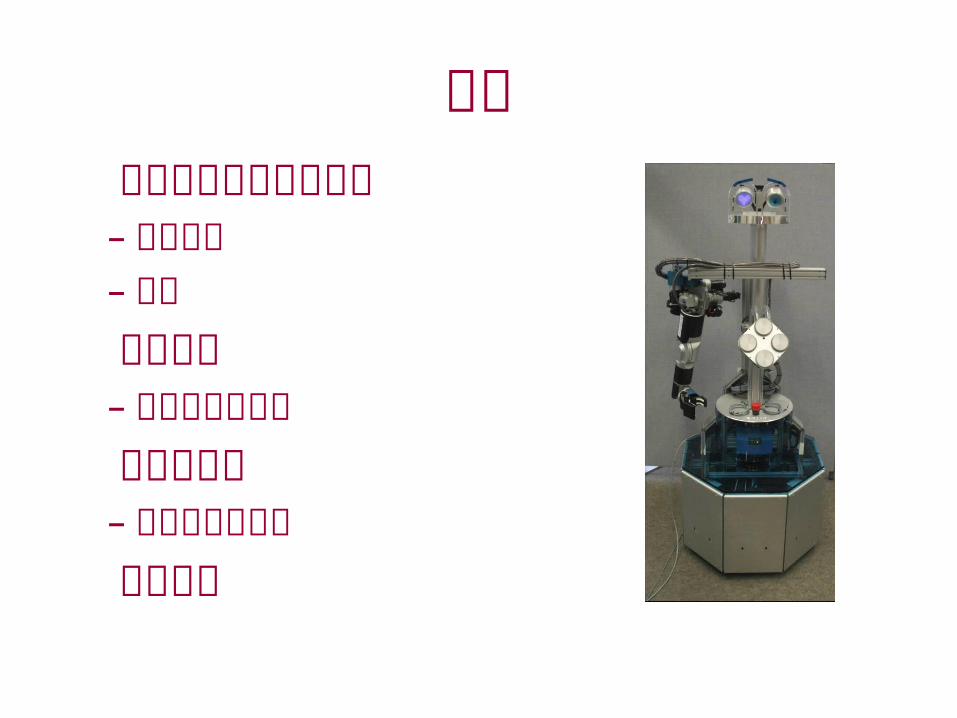
绪论 移动机器人的基本问题
– 基本任务– 案例
基本概念– 环境表示与建模
面临的挑战– 定位与地图创建
发展现状
绪论 从一条微博说起
绪论
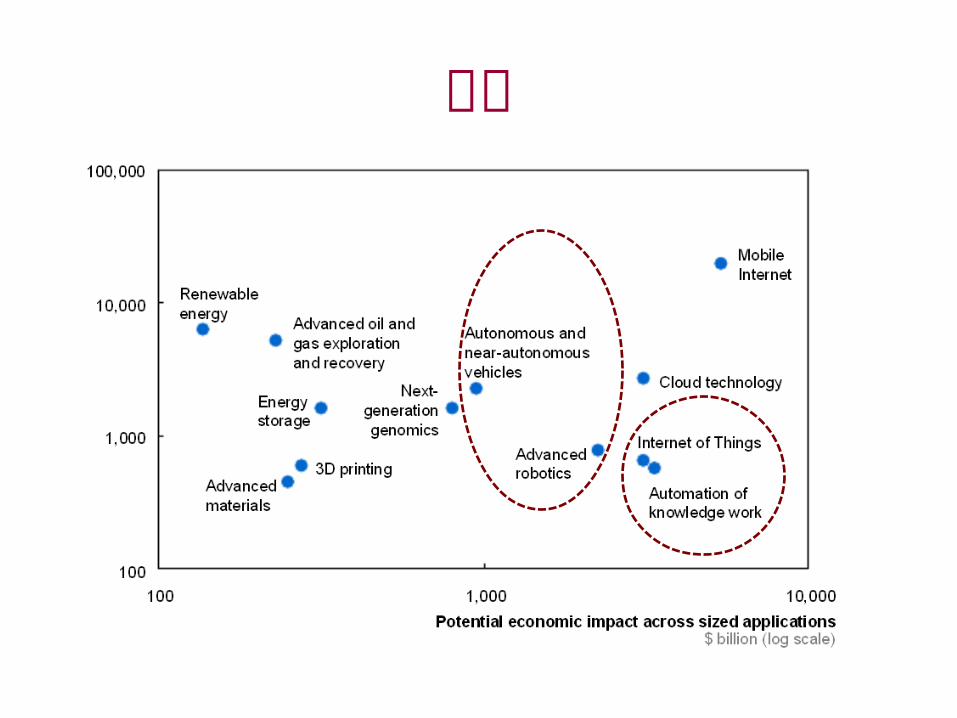
有望改变生活、商业和全球经济的 12 大颠覆技术
绪论成本低廉的移动计算设备与互联网连接
以智能软件系统取代人工从事脑力劳动,例如,智能电话客服
移动互联网
脑力劳动自动化
物联网 低成本传感器与执行器形成的网络,用于数据采集、监控、决策、过程优化
云计算 利用导入网络或互联网上的软硬件资源提供信息服务
先进机器人技术 具有更强传感、灵巧、和智能的机器人完成自动化任务或增强人力的任务
自主或近自主的智能车辆
无人或近无人驾驶或导航的车辆
下一代基因技术 快速、低成本的基因组定序、先进大数据分析及生物合成
储能技术
3D 打印技术
包括电池在内的储能设备或系统
基于数字模型材料分层打印实现实体创建的增量制造技术
新材料 形成的具有超性能或功能的材料
先进的油气开采技术 可用于经济油气提取的开采技术
可再生能源 降低环境破坏的再生能源的电力技术
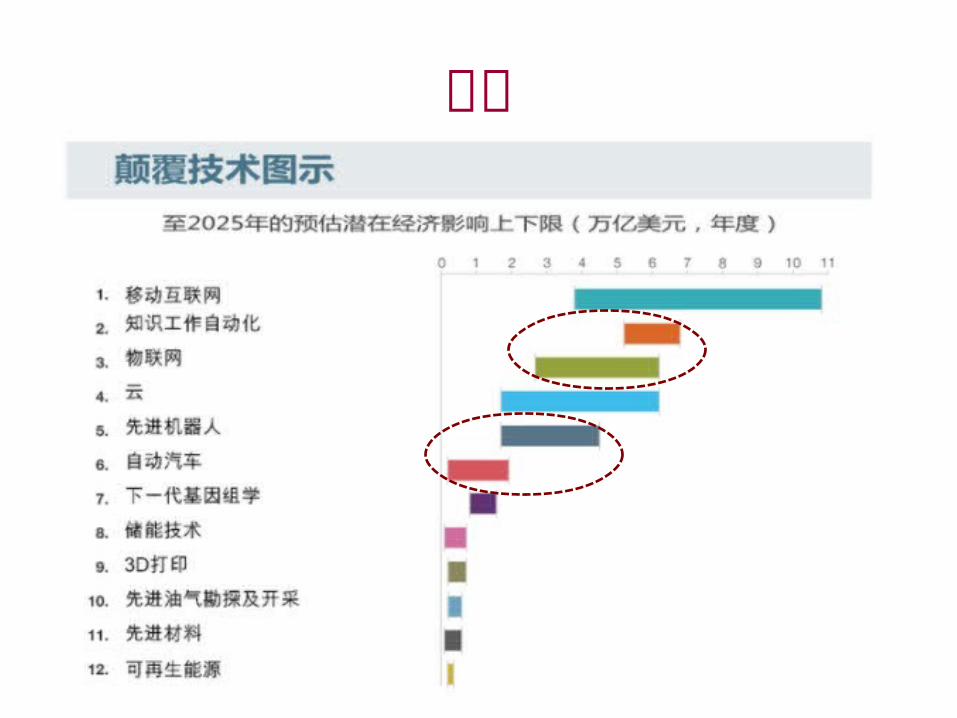
绪论
绪论
绪论比尔•盖茨参加 Reddit 的“有问必答”
在问答中,盖茨预测机器人、自动化技术及新交互技术将成为改变世界的新科技革命。

绪论 另一条微博
绪论 预测未来
通过分析互联网上的信息来判断未来会发生什么
绪论 家庭自动化当冰箱中的牛奶快要喝完时,冰箱能自动下订单。
绪论 机器人希望利用机器人在家中和办公室中完成一些繁琐的工作,例如煮咖啡。
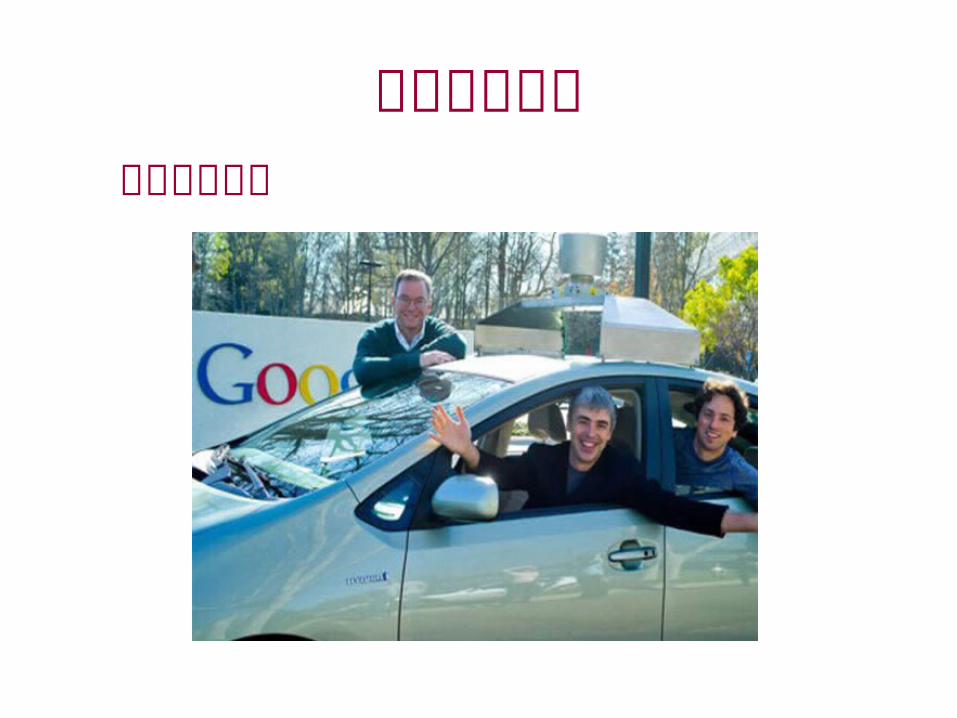
谷歌未来技术 无人驾驶汽车

谷歌未来技术 智能恒温器 家居环境控制系统能自主学习,确定什么样的环境最舒适,同时帮助用户节约电费
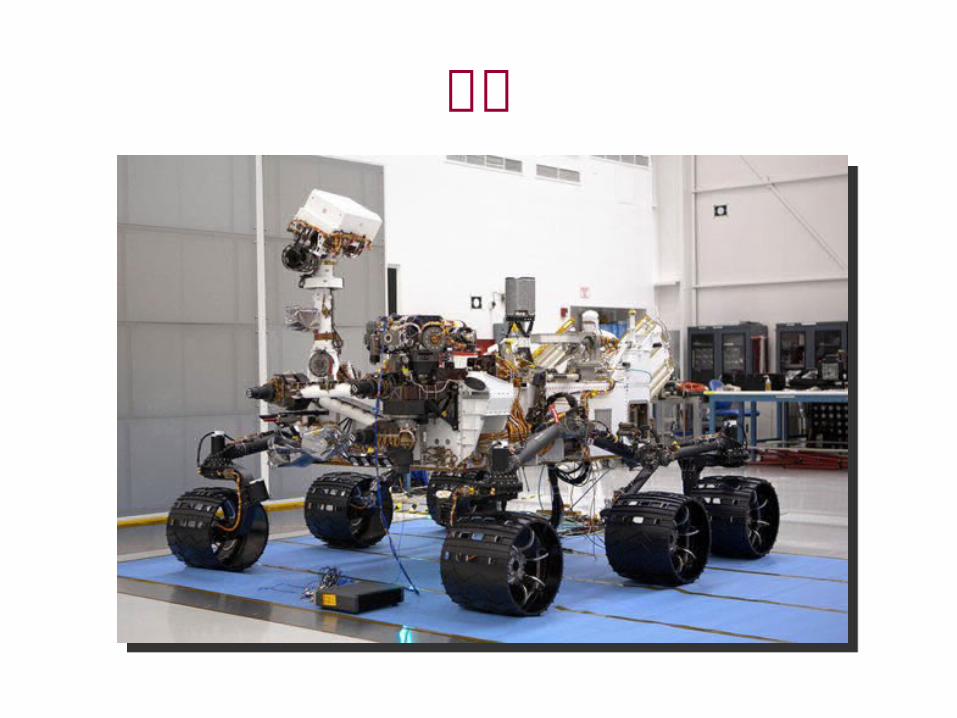
绪论
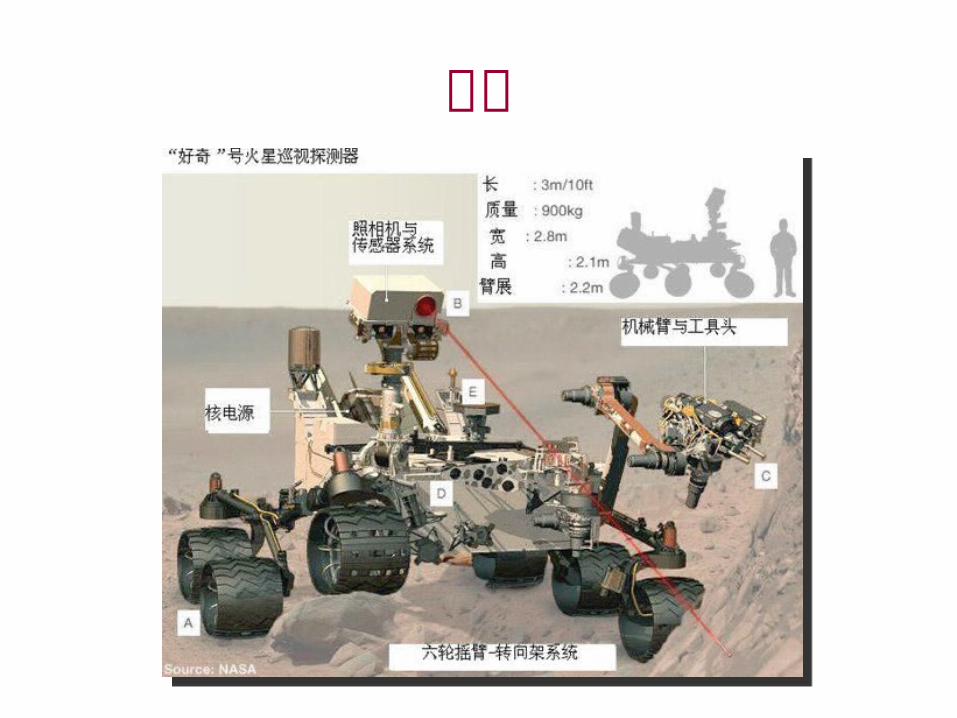
绪论 ‘好奇号’火星车的性能数据 任务级别: NASA 十年一次的“旗舰”级探测任务 官方名称: Mars Science Laboratory ( MSL )火星科学实验室 承包商:洛克希德·马丁公司、波音公司、喷气推进实验室(JPL)
耗资: 25亿美元,发射过程 7 亿,建造维护 18 亿美元,最昂贵的火星探测项目 重量:发射质量 3893kg ,包括 899kg 的火星车; 2401kg 的进入、下降和着陆 ( EDL )系统(包括降落伞和下降使用的燃料);以及 539kg 的巡航级 大小:长度 3.0m ;宽度 2.8m; 高度: 2.1m; 臂长: 2.1m ,车轮直径 0.5 米 动力:锂离子电池提供动力,热电发生器( MMRTG) 提供充电 运载器:联合发射联盟( ULA )研制的 Atlas-V541 火箭( AV-028)
发射时间:美国东部时间 2011.11.26 10:02:00.211(EST) , 北京时间: 2011.11.26 23:02:00.211
着陆时间:北京时间: 2012.8.6 13 点至 13 点半http://baike.baidu.com/view/2491196.htm
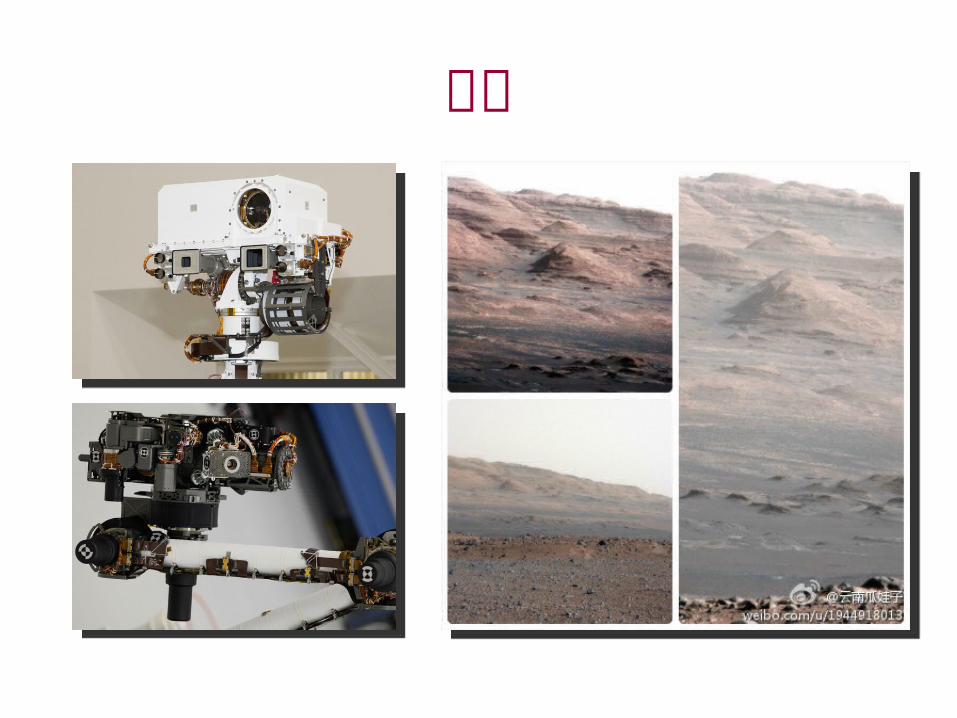
绪论

绪论
绪论
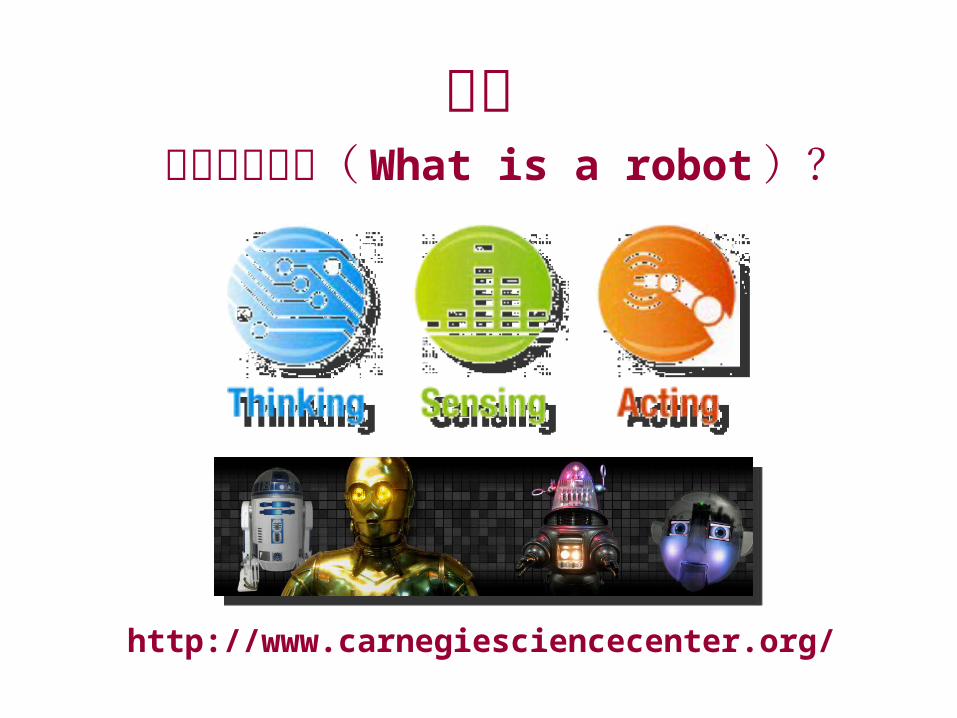
绪论 什么是机器人(What is a robot)?
http://www.carnegiesciencecenter.org/
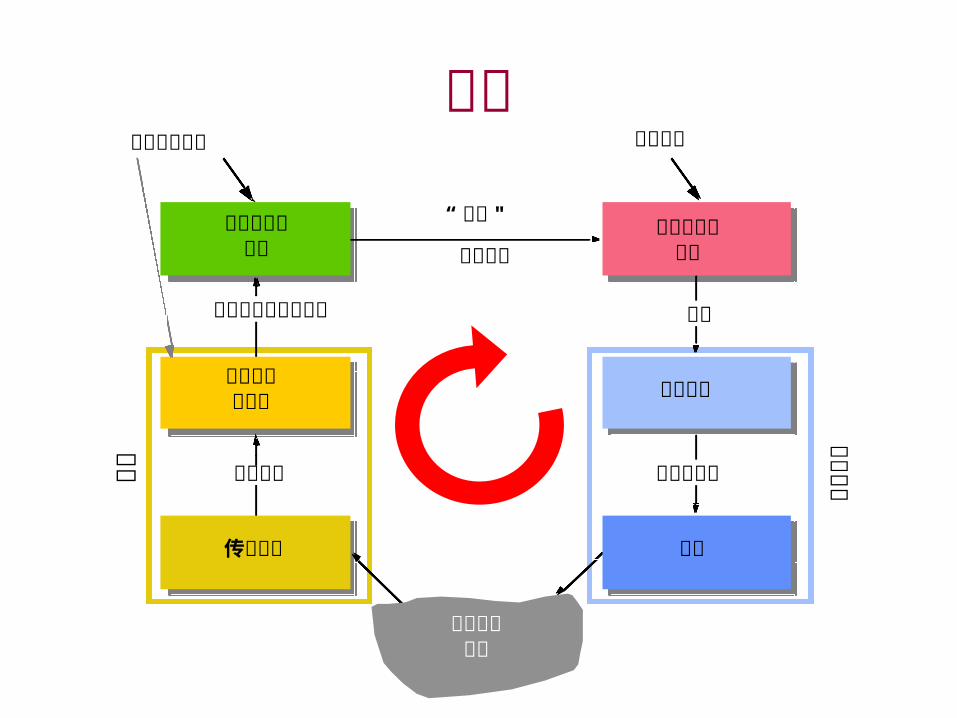
绪论
原始数据
环境模型与局部地图
“位置 "
全局地图
执行器命令
传感过程 动作
信息提取与理解 路径执行
认知与路径规划
知识与数据库 任务命令
路径
现实世界环境
定位与地图创建
运动
控制
感知
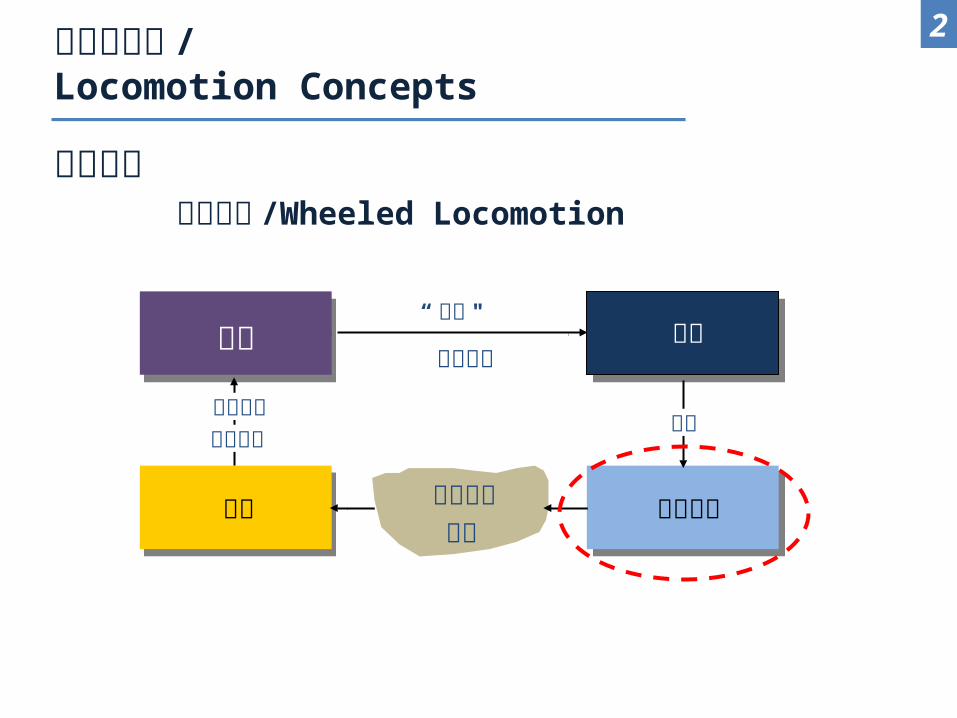
移动的概念 /Locomotion Concepts
基本概念 轮式运动 /Wheeled Locomotion
“位置 "
全局地图
感知 运动控制
认知
现实世界环境
定位
2
路径环境模型局部地图
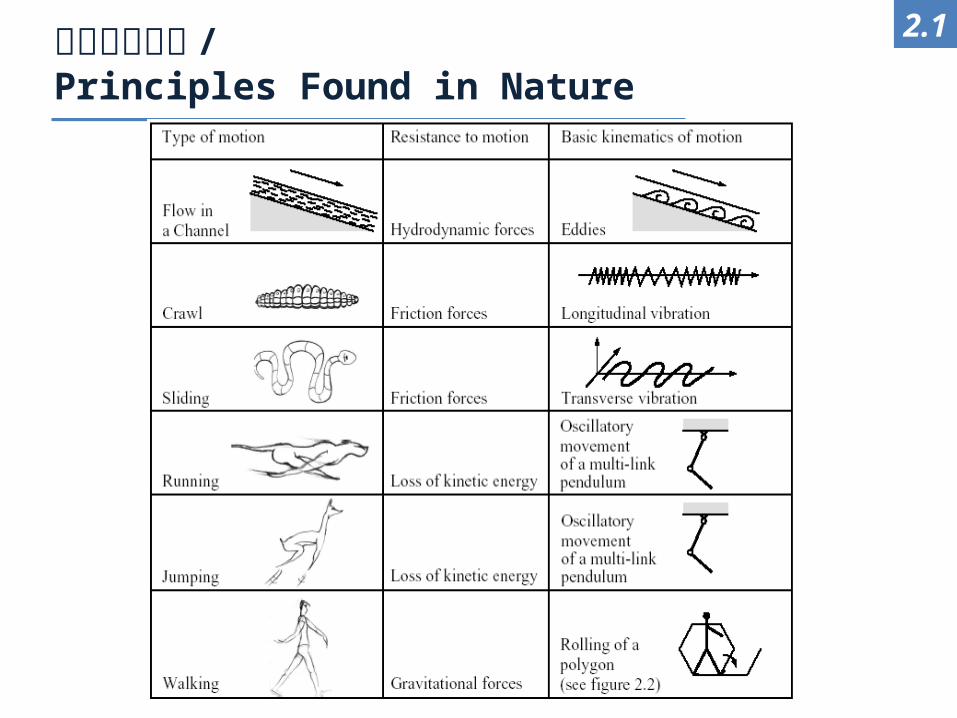
自然界的启发 /Principles Found in Nature
2.1
移动的概念 /Locomotion Concepts
自然界的启发 /Concepts found in nature 技术上模拟自然界的移动方式大都有一定的难度(规模 /尺度 /效率)
双足式移动是最简的生物单形式
轮式 /履带( wheels or caterpillars )是最普遍的移动方式
这是因为滚动是一种高效的移动方式 , 但自然界里还没有发现Nature never invented the wheel !
值得注意的是,双足行走是最接近滚动的一种方式
2.1
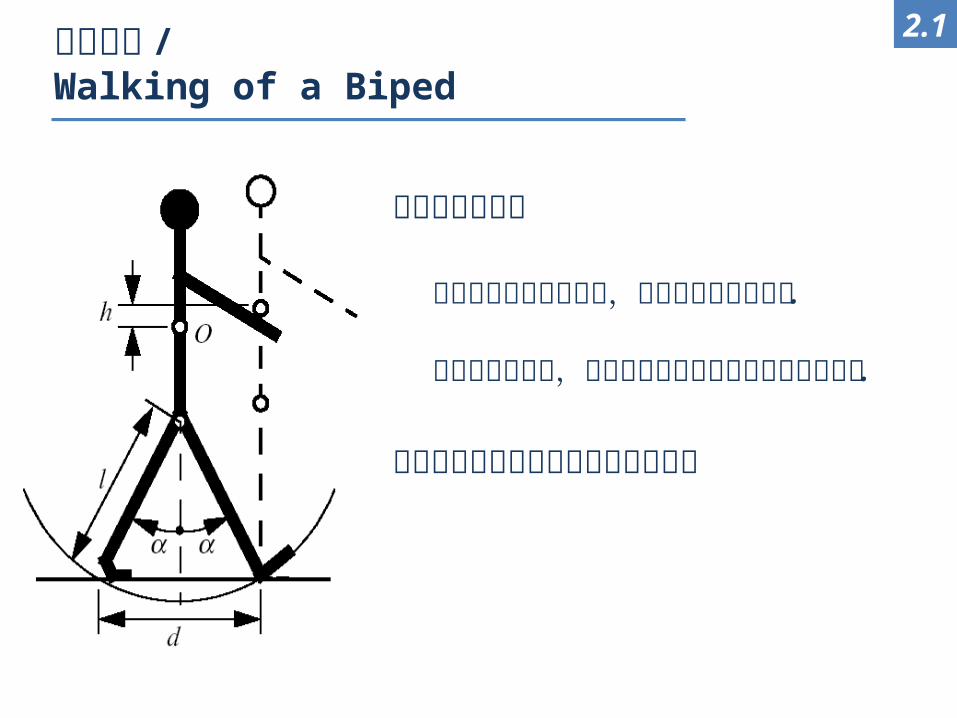
双足行走 /Walking of a Biped
双足行走的机制
近似看作滚动的多边形,边长就是步伐的跨距 .
随着步距的减少,多边形滚动可以近似看作轮式的滚动 .
自然界中还未进化出完全旋转的关节
2.1
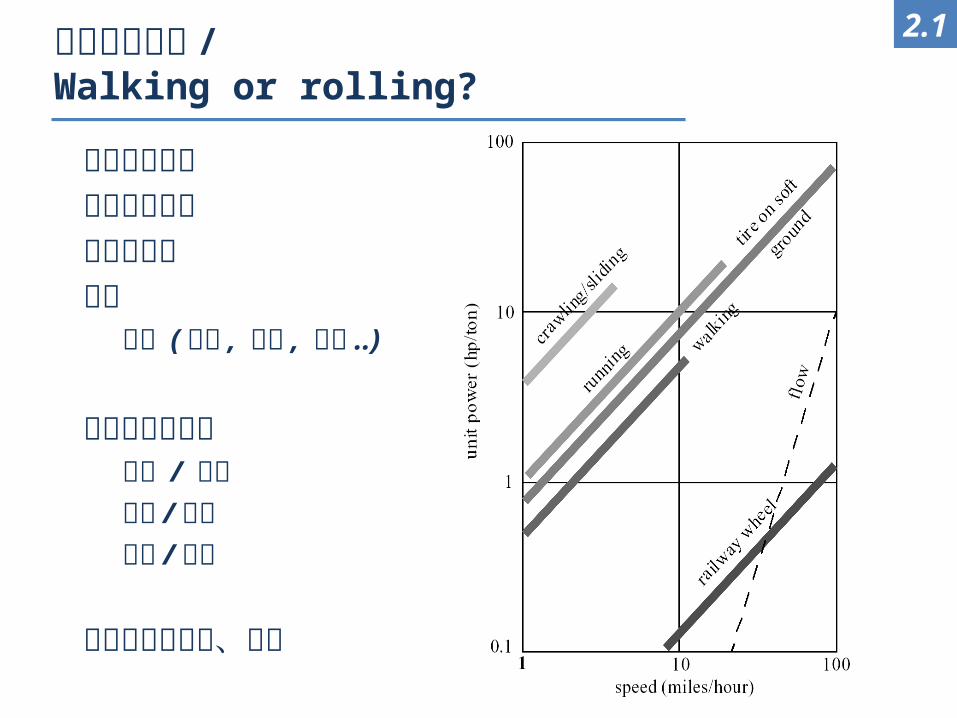
步行还是滚动 /Walking or rolling?
驱动器的规模结构的复杂度控制的成本能效区域 ( 平地 , 软地 , 山地 ..)
多种形式的运动行走 / 跑动 爬行 /滑动滚动 /流动
硬地路轨最简单、高效
2.1
轮式移动机器人 /Mobile Robots with Wheels
轮式适用于大多应用场合
三轮足以保证移动的稳定性
三轮以上需要柔性的悬挂系统
轮子的选择依赖于具体的应用需求
2.3
基本类型 /The Four Basic Wheels Types
a) 标准论 : 两个自由度 ; 绕轮轴和接触点的旋转
b) 脚轮 : 三个自由度 ; 绕轮轴、接触点以及脚轮轴的旋转
a) b)
2.3.1
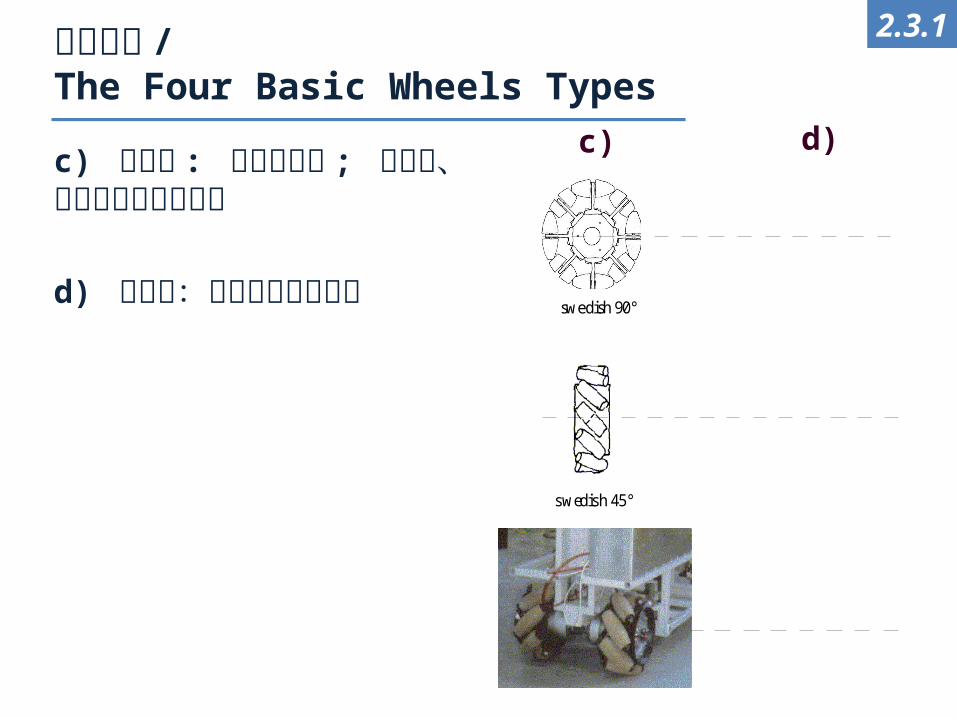
基本类型 /The Four Basic Wheels Types
c) 瑞典轮 : 三个自由度 ; 绕轮轴、辊子及接触点的旋转
d) 球形轮:悬挂技术尚未解决
swedish 45°
swedish 90°
c) d)
2.3.1
结束语
中秋快乐!





























