Embed Size (px)
DESCRIPTION
技术词汇. CST: 一个 Controlbus 框架中对所有模板保持同步的时间值 直接连接:控制器建立与 I/O 模板的一个单个连接 电子键( Electrnic Keying): 是系统特性,要求一个物理模板属性是否与软件组态的一样. 准确匹配( Exact Match): 要求模板和其软件中的组态“全等”匹配--厂商,目录号(板型),系列号, major/minor 版本等.( minor revision: 版本更新不影响它的功能和软件用户接口.例清除 bug) 兼容模板:除 minor revision 版本外匹配 禁止键:模板不拒绝连接. 技术词汇. - PowerPoint PPT Presentation
Citation preview
技术词汇• CST: 一个 Controlbus 框架中对所有模板保持同步
的时间值• 直接连接 : 控制器建立与 I/O 模板的一个单个连接• 电子键 (Electrnic Keying): 是系统特性 , 要求一个
物理模板属性是否与软件组态的一样 . – 准确匹配 (Exact Match): 要求模板和其软件中的组态“全等”匹
配 -- 厂商 , 目录号 ( 板型 ), 系列号 ,major/minor 版本等 .(minor revision: 版本更新不影响它的功能和软件用户接口 . 例清除 bug)
– 兼容模板 : 除 minor revision 版本外匹配– 禁止键 : 模板不拒绝连接
技术词汇
• Contrlbus: ControlLogix 背板的名字。是个多主总线 . 即以轮询机会 , 一个模板发一个包 .
• 宽带 (Boud width): 附可接收错误的数据传送量• Throughput: 检测输入 , 进行逻辑操作 , 到输出
的时间 . 吞吐量决定于波特率、协议和网络模式(源 / 目标 , Producer/Consumer)
• NUT:ControlNet 网上数据发送的最小重复的时间间隔 .RSNetwork 可组态其为 2--100ms
• RPI(Requested Packet Interval): 决定何时模板多点传播 (multicast) 数据
• Producer/Consumer 通讯 : 模板间智能地数据交换 . 不需要轮查每一模板 .
• IFM(Interface Module): 予布线的 RTB• 只听连接 (Listen-Only Connection): 该连接允许控制器不
拥有 (own)I/O 板而监视它 . 听模板的输入或输出回返 (echo) 数据 . 只要有一个处理器和模板的连接有效 , 就可以听到 .
技术词汇 ( 续 )
DI/O 特征• RIUP• Producer/Consumer 通讯
– 无需轮询,智能的数据交换
• 模板级故障报告和现场侧诊断检测• 与处理器同一框架的模板,基于系统时钟,数据的时间
粘贴• 基于时间粘贴输入 , 预定输出 (16 秒内 )• 全部用软件组态,包括禁止 / 允许模板动作• 电子键• 认证 : Class I/Division 2, UL, CSA, CE, FM
DI/O 操作
• 输入模板可多个 Owner• 输出模板只可以有一个 Owner• 当组态数据下载时 , 本地 I/O 模板准备运行 . 而
使能远程 I/O 模板 , 需要运行 RSNetwork.( 建立NUT)
• 永久移去模板时 , 用 RSNetwork 优化网络宽带• 控制器连续监视连接 , 有问题立即设模板故障
位
远程框架上 I/O 连接
下述组合 :• 以机架为单位 ( 仅对 DI/O).
– 用于非诊断板和无 fuse 板 . 输入 / 输出 -echo 仅数据、故障,无诊断信息。
• 直接连接
DI
• 可分别组态 1 到 0 , 0 到 1 的滤波时间,有利于改进干扰的影响
• 可选点-点隔离
DI 数据传送时刻
• 本地输入板– RPI(200MS-750MS) 和 COS 时多点广播数据 .
希望 COS 传送 ,RPI 值选大 COS 与 RPI 异步于程序扫描 , 编程时将输入数据拷贝到另一结构 ,防止程序中数据变化
• 远程输入板– RPI 和 COS 时传送数据 RPI 选用为 NUT 的 2 的幂次
DO
• 可以单点组态在通讯故障或编程时的输出 :0,1,最后状态
• 输出数据 ECHO• 可选点 - 点 , 组 - 组隔离
DO 数据传送时刻
• 本地输出模板– 程序扫描结束– RPI
• 远程输出模板– 仅 RPI
– 输出数据 ECHO 作为多点广播输入 .按模板类型含故障和诊断信息 . 当模板与自己的 OWNER 断连接时 ,也断 ECHO
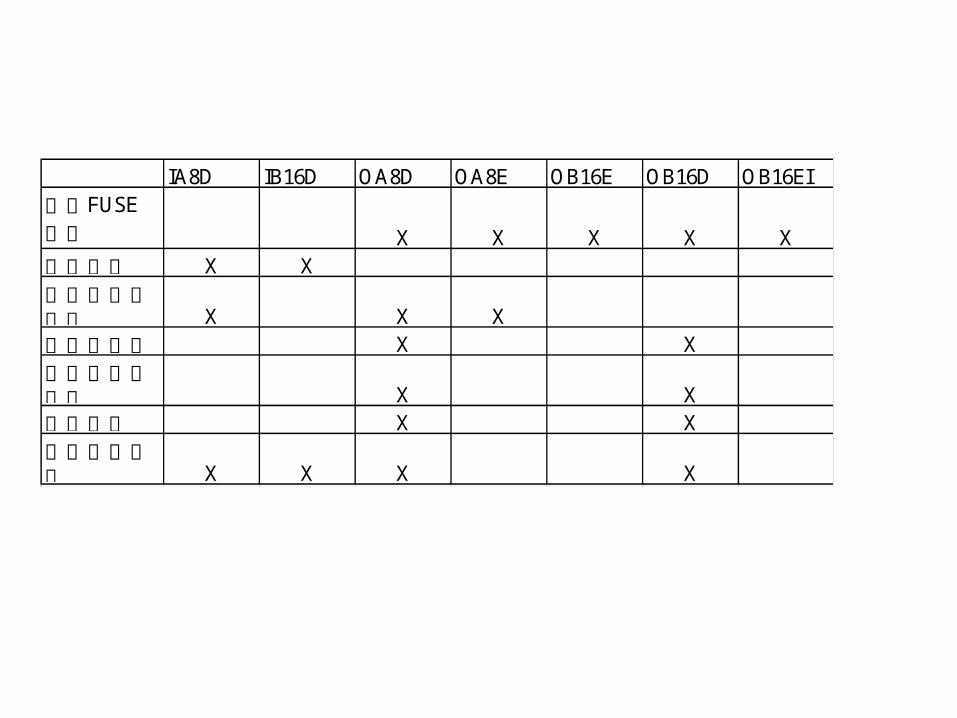
IA8D IB16D OA8D OA8E OB16E OB16D OB16EI
电子FUSE
点级 X X X X X
开线检测 X X
现场侧掉电检测 X X X
无负荷检测 X X
现场侧输出核实 X X
脉冲测试 X X
锁存诊断信息 X X X X
• 电子 FUSE 保护 :替代模板保险丝 ,防止模板短路 , 不替代外部保险丝、空开。可由应用、 MMI 或 RESET自动复位
• 输出核实:将电源侧和逻辑侧指令(输出和命令)比较,真正一致为正确。可用于将它与输入状态比较应用。
• 脉冲测试:不真正改变输出负载状态,发短脉冲看输出回路是否有响应,也就是从回路的电流特征看是否有状态改变命令给回路,以确保没短路或过载。如果没响应,自动增加测试脉冲宽度。如增大到最大时,仍无响应,认为是无负载。
• 锁存诊断信息:由软件或 I 、 O 电源 cycle 复位 故障产生和复位时粘贴诊断时间
• 点级诊断报告。不影响其它点发送、接收
练习
• 时间粘贴• 基于时间粘贴输入 , 预定输出
– 建议 1 点时间粘贴 / 输入模板
AI/O 模板• LED
• RIUP
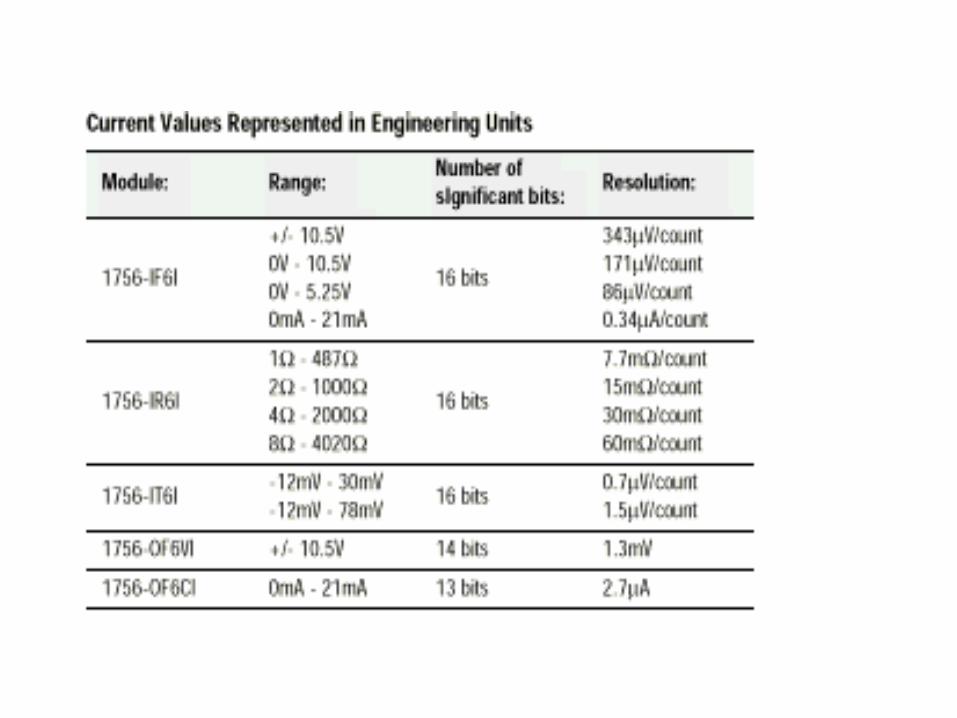
• 分辨率AI 16 位 ; AO 13-16 位
• Producer/Consumer 通讯• 禁止模板
断连接
• 数据的滚动时间标记 (Rolling Timestamp of data): 当采样数据时 ,15 位毫秒级时间粘贴 .
• 数据的系统时间标记 : 本地框架中模板和其处理器间传送数据时 ,64 位时钟的时间粘贴
AI/O 模板 ( 续 )
• IEEE 32 位浮点或 16 位整数格式– 整数格式可以快速采样 ,少一些内存 ,但限制了某些特性 :
不支持数字滤波 ,过程报警 ,速率报警 , 定标
• 板内在特征 : 工程单位定标 , 报警 , 上 / 下溢检测…
• 基于通道或板的校验– 加校正偏差以补赏传感器偏差误差
• 认证 : Class I/Division 2, UL, CSA, CE, FM
组态
• AI 可多于一个主 , AO 仅一个主• 程序下载时 , 主传送组态数据到模板• 运行时刻 :
– 本地模板 : 组态数据下载即运行– 远程模板 : RSNetwork 使能 I/O 模板 ,并建立 NUT( 组态时指
定 )
• RSLogix 5000 组态模板且下载信息至处理器 . 若有远程模板必运行 RSNetwork
多点传播 (Multicast)
• 本地 AI 多点传播数据时刻 :– RTS RTS<=RPI 时 任何时刻可改变此值 扫描全部通道值 板内存储器 备板– RPI 和 RTS RTS>RPI
仅编程状态时可改变 板存储器数据 备板
• 远程 AI 多点传播数据时刻 : RPI建议 RPI<=RTS
AO 接收数据时刻
本地 / 远程 : RPI
1756-IF8, IF16
• 不隔离的 AI• -10V--+10V, 0--5V, 0--10V, 0--20mA• 布线方法
– 单端– 差动
• 可用通道数减半• 2 个通道中的一个可设为高速方式 , 即最快的数据更新
• 不同数据格式可用特性– 整数格式 : 多种输入范围 ; 模板滤波器 ;实时采样 – 浮点格式 : 除整数格式可利用特性外 ,还具有 定标 ; 数字滤波 ; 过
程报警 ; 速率报警 ;(1756-IF16 单端方式不能利用后二项 )
1756-IF8, IF16( 续 )
• 断线检测– 输入值为指定的定标值– 设主处理器的报警位
• LAD 中可使用 TAG来诊断– Module Fault Word
– Channel Fault word
– Channel Status Word…...
过程报警
以通道为单位 :• 超出予组态的 HH,H,L,LL 时报警• 可设死区• 可锁定该报警
1756-IF6I
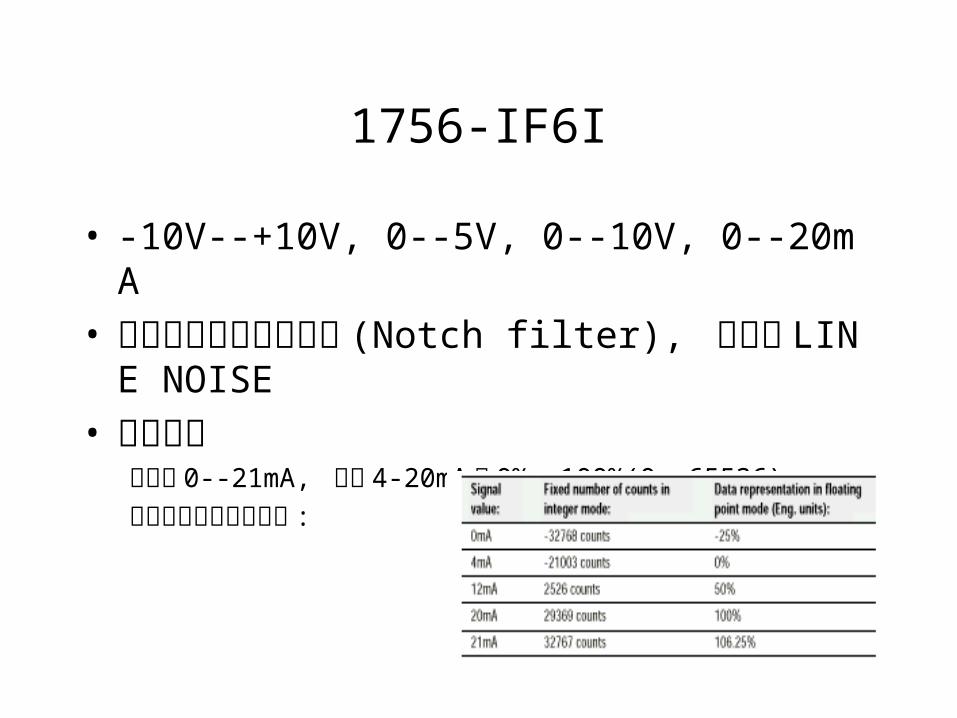
• -10V--+10V, 0--5V, 0--10V, 0--20mA• 每个通道的阶式滤波器 (Notch filter), 以消除 L
INE NOISE• 任意定标
例输入 0--21mA, 定标 4-20mA 为 0%--100%(0--65536)
定标不可利用整数方式 :
1756-IR6I, IT6I
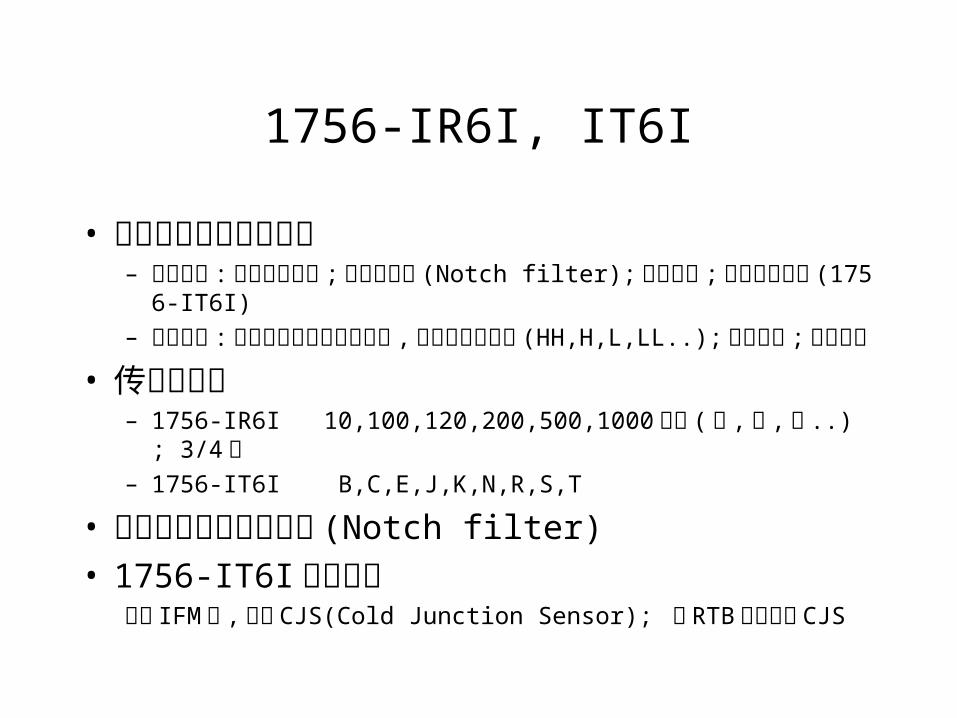
• 不同数据格式可用特性– 整数格式 : 多种输入范围 ;阶式滤波器 (Notch filter);实时采样 ;冷端温度补赏 (1756-IT6I)
– 浮点格式 : 除整数格式可利用特性外 ,还具有过程报警 (HH,H,L,LL..);数字滤波 ;速率报警
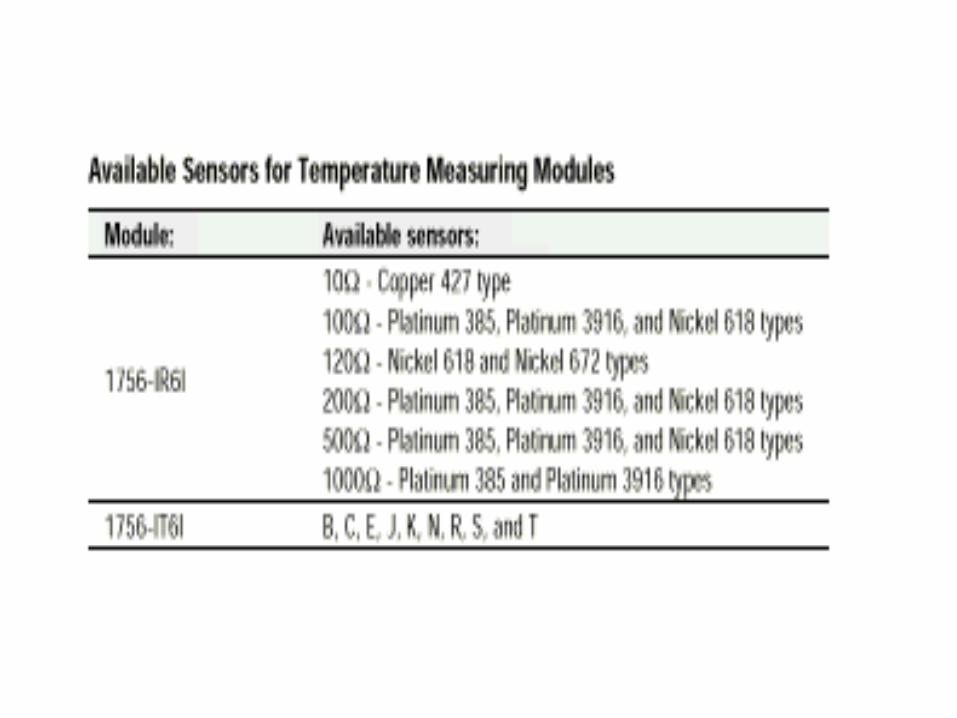
• 传感器类型– 1756-IR6I 10,100,120,200,500,1000欧姆 (铜 ,铂 ,镍 ..) ; 3/4 线– 1756-IT6I B,C,E,J,K,N,R,S,T
• 每个通道的阶式滤波器 (Notch filter)• 1756-IT6I冷端补赏
当用 IFM 时 , 内含 CJS(Cold Junction Sensor); 用 RTB 时则要接 CJS
1756-OF4,OF8
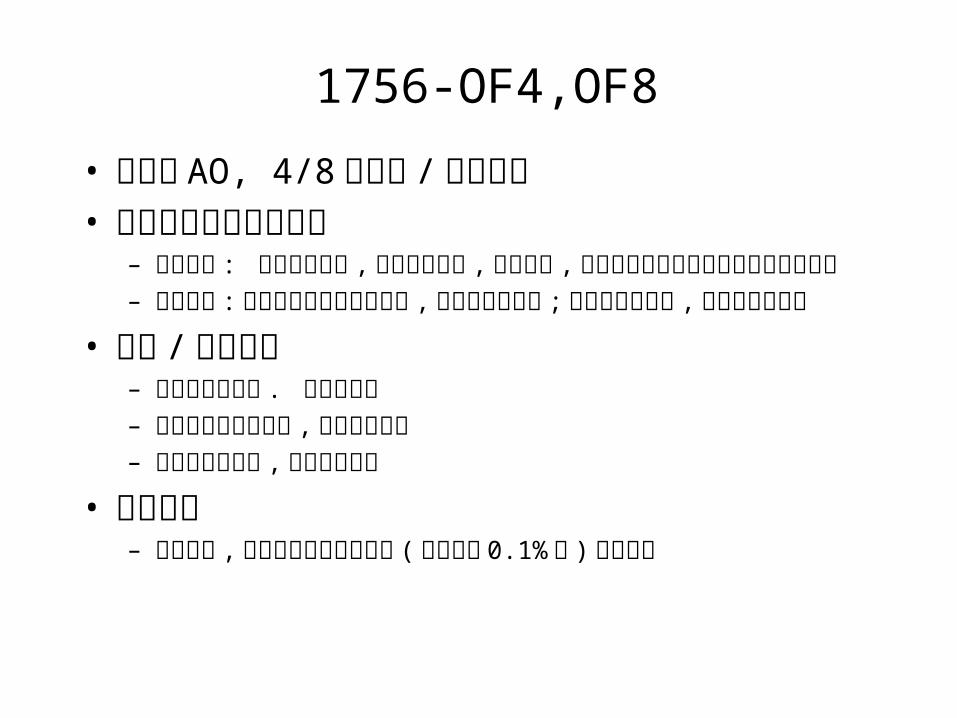
• 不隔离 AO, 4/8路电压 / 电流输出• 不同数据格式可用特性
– 整数格式 : 斜坡至编程值 ,斜坡至故障值 ,启动保持 , 故障或程序方式保持最后状态或用户值
– 浮点格式 : 除整数格式可利用特性外 ,还具有箝位输出 ; 运行时斜坡输出 ,速率和极限报警
• 斜坡 /速率限制– 运行时斜坡限制 . 仅浮点方式– 接控制器编程命令时 , 改变至编程值– 通讯故障产生后 , 改变至故障值
• 启动保持– 防止跃变 , 控制器输出接近此值时 ( 全刻度的 0.1% 内 )才起作用
1756-OF4,OF8( 续 )
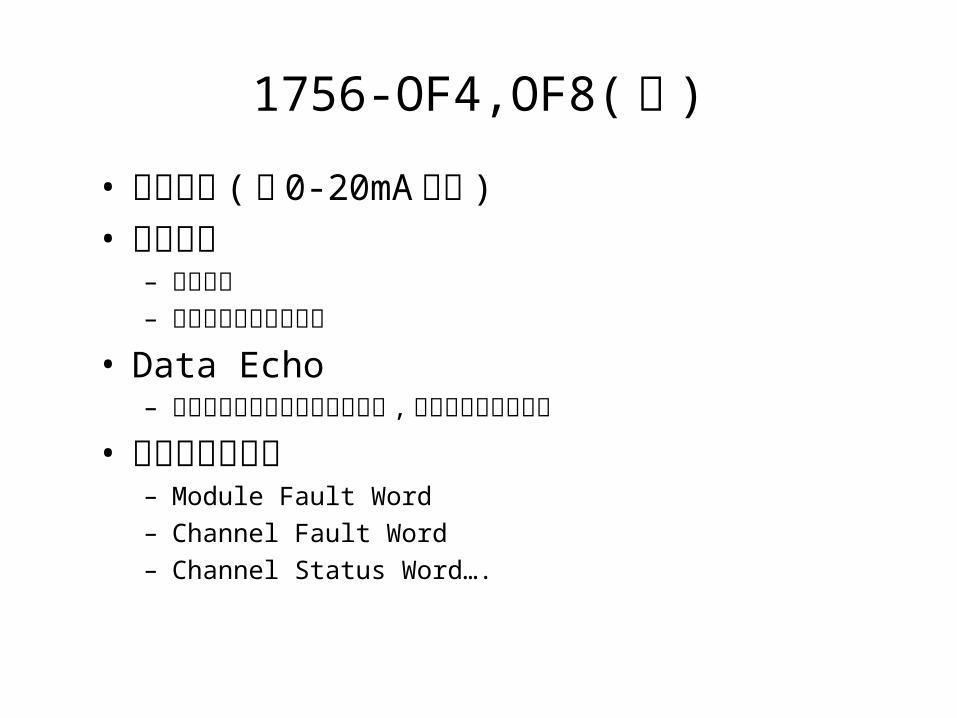
• 断线检测 ( 对 0-20mA 组态 )• 箝位输出
– 浮点方式– 可禁止箝位报警或锁定
• Data Echo– 自动多点广播当时输出的通道值 , 包括故障和状态数据
• 故障和状态报告– Module Fault Word
– Channel Fault Word
– Channel Status Word….
1756-OF6CI, OF6VI
• 隔离 AO, 6路电压 / 电流输出• 不同数据格式可用特性
– 整数格式 : 斜坡至编程值 ,斜坡至故障值 ,启动保持 , 故障或程序方式保持最后状态或用户值
– 浮点格式 : 除整数格式可利用特性外 ,还具有箝位输出 ; 运行时斜坡输出 ,速率和极限报警
安装模板
• 键控 RTB, 设每个糟不一样• 布线臂
– RTB• 除 1756-IR6R 用 Belden 9533 或 83503 外 , 其它用 Belden 8761.(2
2-14gauge, 用粗线时建议用 1756-TBE深度扩展盒 )
• 接地在现场侧 .若不能 ,在框架地• 类型 :
– 1756-TBCH 螺丝夹紧– 1756-TBNH 螺丝绕线– 1756-TBSH 或 1756-TBS6H 压紧
– 1492-IFM
RSLogix 5000 组态 AI/O
• 建新模板– offline--右点 I/O Configuration--new module, 选择目录号 ,槽位 , 通讯格式
(浮点 , 带 CST 时间粘贴等… ), 版本 , 电子键– 组态
• 确省组态 , 或• 选择 RPI, 信号范围 , 报警限 ..--Download 到程序
• 动态再组态offline--I//O Configuration--右点指定模板 --Properties– 处理器 Remote Run Mode/Program Mode (RPI 等只可 Program Mode)– 拥有多个处理器的模板组态必须一样– 远程模板必须先组态 1756-CNB,CNBR
右点 I/O Configuration--new module--1756-CNB,CNBR 组态 --右点 1756-CNB,CNBR--new module
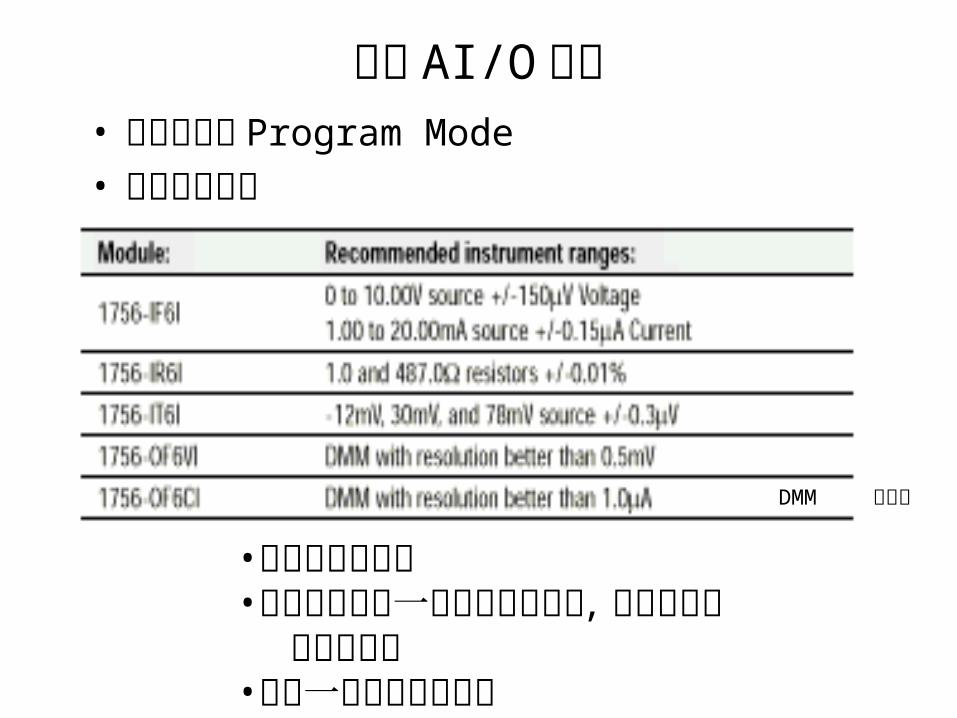
校正 AI/O 模板• 推荐处理器 Program Mode• 推荐检测仪表
DMM 数字表
•不要带输出设备•校正结束前每一通道状态不变化 , 不以新数据 更新处理器•推荐一次更新所有通道
AI校正例 :1756-IF16,IF8
• 全使用 +/-10V 信号范围• 连接电压校正器至模板• Online--Module Properties--Calibration• 设校正器为低参照 ,依次对各通道校对 , 直至状态显示 OK
• 设校正器为高参照 ,依次对各通道校对 , 直至状态显示 OK
校正
• 1756-IF6I 使用 +/-10V• 1756-IR6I 使用 1-487欧姆• 1756-IT6I 使用 -12-30mV
或 -12-78mV
AO校正例 :1756-OF6CI
• 连接电流表至模板• Online--Module Properties
– Configuration 确认通道信号 – Calibration 对各通道低 /高参照校正
诊断灯 LED• AI– OK
绿 输入多点广播 绿闪 通过内部诊断 , 当前执行不正确连接通讯 红闪 建立的通讯超时 红 置换模板– CAL
绿闪 模板处于校正方式
• AO– OK
绿 输出正常 绿闪 通过内部诊断 ,没有有效控制 红闪 建立的通讯超时 红 置换模板– CAL
绿闪 模板处于校正方式
RSLogix 5000 诊断
• I/O Configuration 下故障模板前显示 !• Module Properties
– Module Info 显示状态– Connection 故障类型
• Controller Tag 中 Value在通道位处显示故障线 _
访问模板 TAG
• 按不同模板及其通讯格式建立不同 TAGController User_Doc--右点 Controller Tag
– Monitor Tag 观看 , 改变 TAG 值– Edit Tag 增加 ,删除 TAG, 不能 改变 TAG 值
通过 TAG 改变组态
• Offline• 模板级组态
例 :TempMode 中指定温度单位 (F ,C )
• 点级组态例 : 冷端补赏 ,实时采样 ..
• Download 必须下载后才能改变模板组态
设计考虑• 1756 - DHRIO : 32rack/RIO, 不同 RIO 上不同 rack 号• CONTROLNET 子网间不能用 SCHEDULED MESSAGING• RS232 口只能编程,夸网络模板与其它设备通讯• 背板吞吐量
– 背板是 10MHZ的 16位总线 ,真正吞吐量体现在模板上的 ASIC接口 .
– DI/O,AI/O为 8位同时传送– 处理器 ,通讯模板为 16位同时传送
• 以多点广播二个处理器同时接收同一个输入 , 一个处理器控制输出 . 省交通量 , 速度快 . 二个处理器仍可同时接收输出反馈信息 . 节约系统开销 .
• CST 支持时间粘贴 (+/-200 微秒间 ). 例如 : 利用输入数据变化时数据的数据粘贴 , 达到分辨事件顺序的目的
设计考虑• 对每个槽RTB 设不同 KEY
• 高速输入利用 1MS的周期任务来查输入• 点级组态 : 输出故障状态 , 使能诊断报警 , 输出的脉冲测试 ,
断线 / 无负荷检测 ,AI 数字滤波…• 输入状态改变检测时 ,仍有每 750MS 的“ 心跳”检查以
保证输入是好的• 预定输出使同框架中不同模板上输出同步
建议 1 点 / 模板 , 以此组态预定输出 ( 最大到 16S)
• 开线检测 : 将一个漏电电阻 ( 该值在用户手册中 )夸极限开关接点 . 输入三种状态 :ON,OFF,OPEN. 确保不是进断线信号
AI考虑
• 为使程序致力于控制任务 ,做最少的应用开发 , 可以在 AI/O 模板上做数据格式的转换 ,SCALE, 定 4种报警限 . 有多个 CONSERMER 时更为节约时间
• 按模板类型不同 ,具有不同的数据转换时间 :– 隔离 AI,转换 6 通道为浮点数 ,25MS
整数 10MS– 不隔离 AI,转换 4-16 通道为浮点数 , 11-18MS
整数 8-16MS
二个高速操作方式 ,转换 4 通道为浮点数 , 6MS
整数 6MS
AI考虑• 隔离的差动 AI 1700VDC/1S• 不隔离的差动 AI 10VDC/1S• NOTCH 滤波用于 50/60周波 AC 的模拟量信号恒定
干扰• 数字滤波用于对模拟量信号的随机干扰• RTS(实时采样 ) 数值基于 NOTCH 滤波的选择 . 不快
于最慢的滤波时间• Hold for Init: 用于 PID指令启动其输出时匹配当前输
出 ,在 0.1% 以内 ( 无扰动输出 ).并且以 IN HOLD 位提示 PID指令 , 其输出在当前HOLDING
• 输出 ECHO 值– 输出 RAMPING,ECHO 值慢慢向设定值改变– 输出超范围时 , 输出 CLAMPING
– 校正方式时 ,ECHO 为校正命令前接收的最后输出状态– HOLD FOR INIT
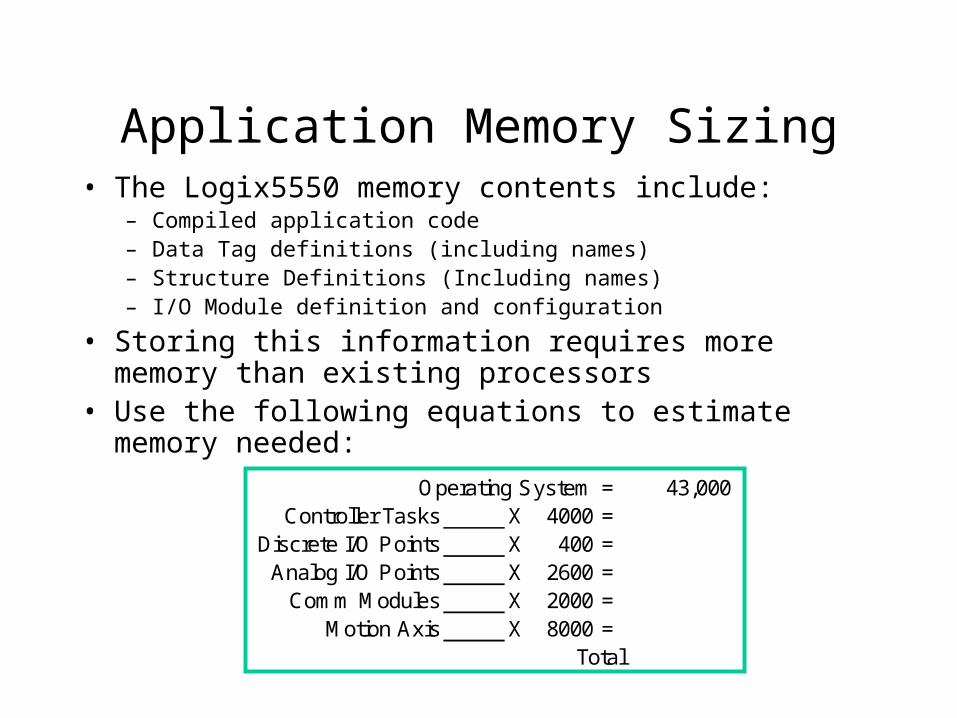
Application Memory Sizing• The Logix5550 memory contents include:
– Compiled application code– Data Tag definitions (including names)– Structure Definitions (Including names)– I/O Module definition and configuration
• Storing this information requires more memory than existing processors
• Use the following equations to estimate memory needed:
Operating System = 43,000 Controller Tasks X 4000 =
Discrete I/O Points X 400 =Analog I/O Points X 2600 =
Comm Modules X 2000 =Motion Axis X 8000 =
Total
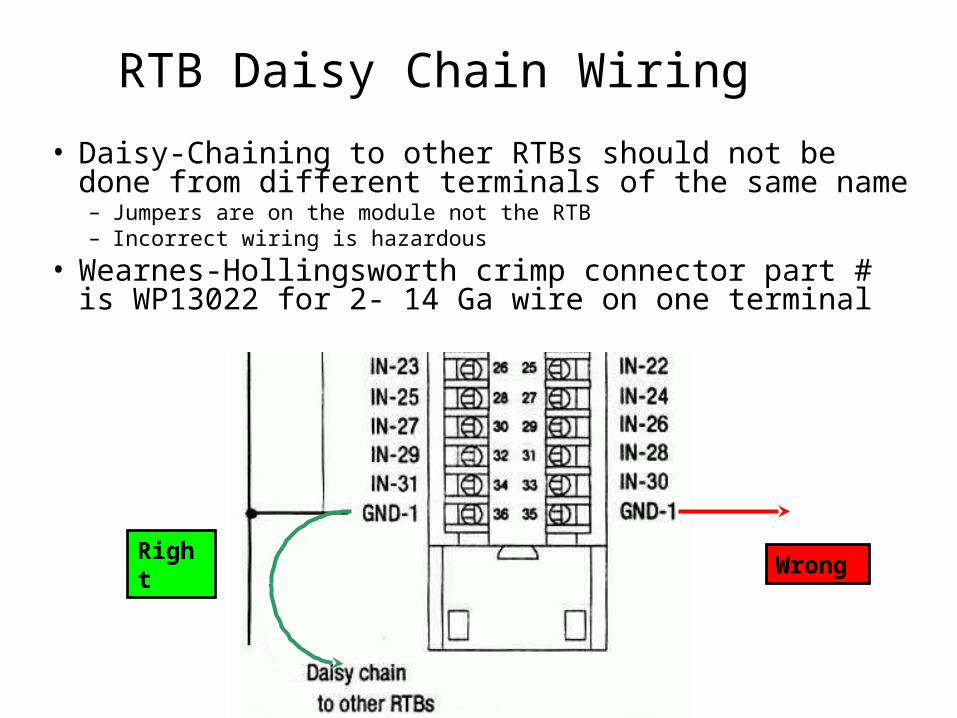
RTB Daisy Chain Wiring
• Daisy-Chaining to other RTBs should not be done from different terminals of the same name– Jumpers are on the module not the RTB– Incorrect wiring is hazardous
• Wearnes-Hollingsworth crimp connector part # is WP13022 for 2- 14 Ga wire on one terminal
WrongRight
RSView 与 CL 连接组态
OPC, 以下参数可较快得到数据• 选 PLC类型• 用 MAP• 多个 TOPIC













![[英语词汇飞跃].( ).Beth.Johnson,.Susan.Gamer.扫描版](https://img.pdfslide.tips/doc/110x75/568c39c71a28ab0235a3a4e1/townsendpressbethjohnsonsusangamer.jpg)



![[刘毅5000词汇] 5000](https://img.pdfslide.tips/doc/110x75/577dae3f1a28ab223f9031b1/5000-5000.jpg)











