Embed Size (px)
Citation preview
第6章�GPS測量(GPS Survey)�1.� GPS測量の位置づけ�
GPSの利用形態�
�1)単独測位�
�2)�
�3)時刻同期�
1)DGPS�2) �
低精度測量�
GPS測量と干渉測位は同義語として用いられている.�
相対測位�干渉測位� GPS測量�
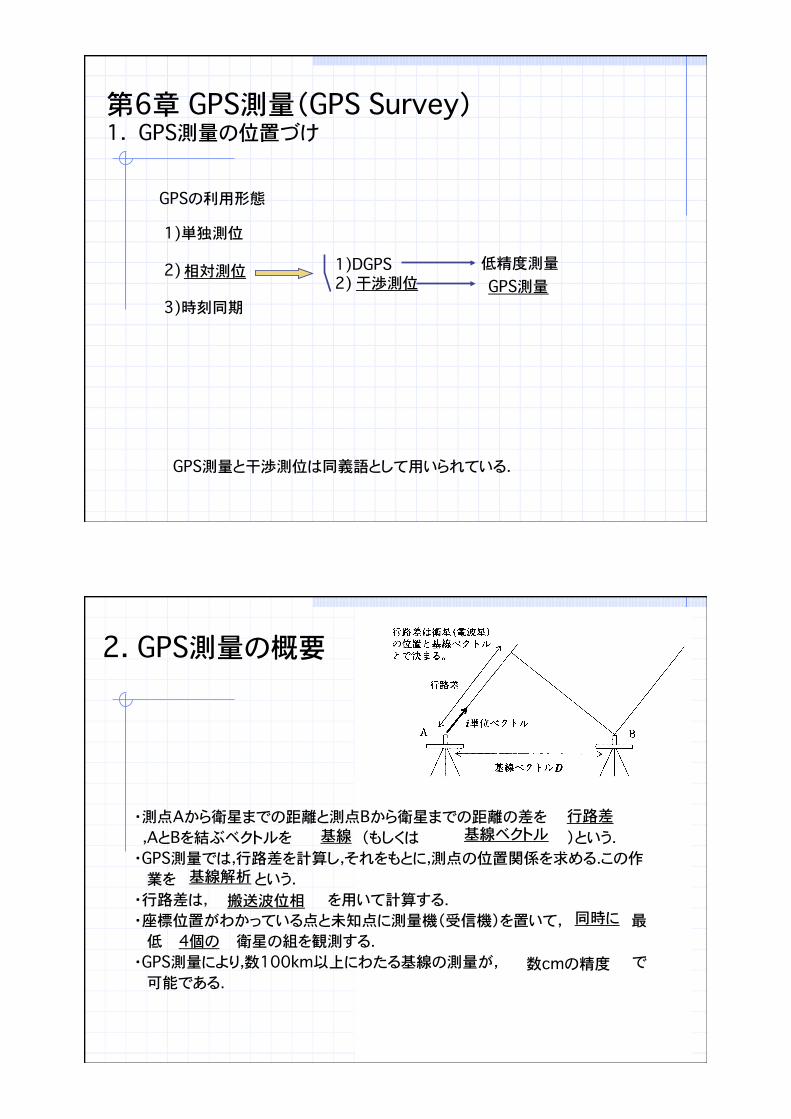
2.�GPS測量の概要�
・測点Aから衛星までの距離と測点Bから衛星までの距離の差を��������������������,AとBを結ぶベクトルを���������������(もしくは��������������������������������)という.�・GPS測量では,行路差を計算し,それをもとに,測点の位置関係を求める.この作業を�����������������という.�・行路差は,��������������������������を用いて計算する.�・座標位置がわかっている点と未知点に測量機(受信機)を置いて,���������������最低����������������衛星の組を観測する.�・GPS測量により,数100km以上にわたる基線の測量が,�����������������������������で可能である.�
行路差�基線� 基線ベクトル�
基線解析�
搬送波位相�同時に�
4個の�数cmの精度�
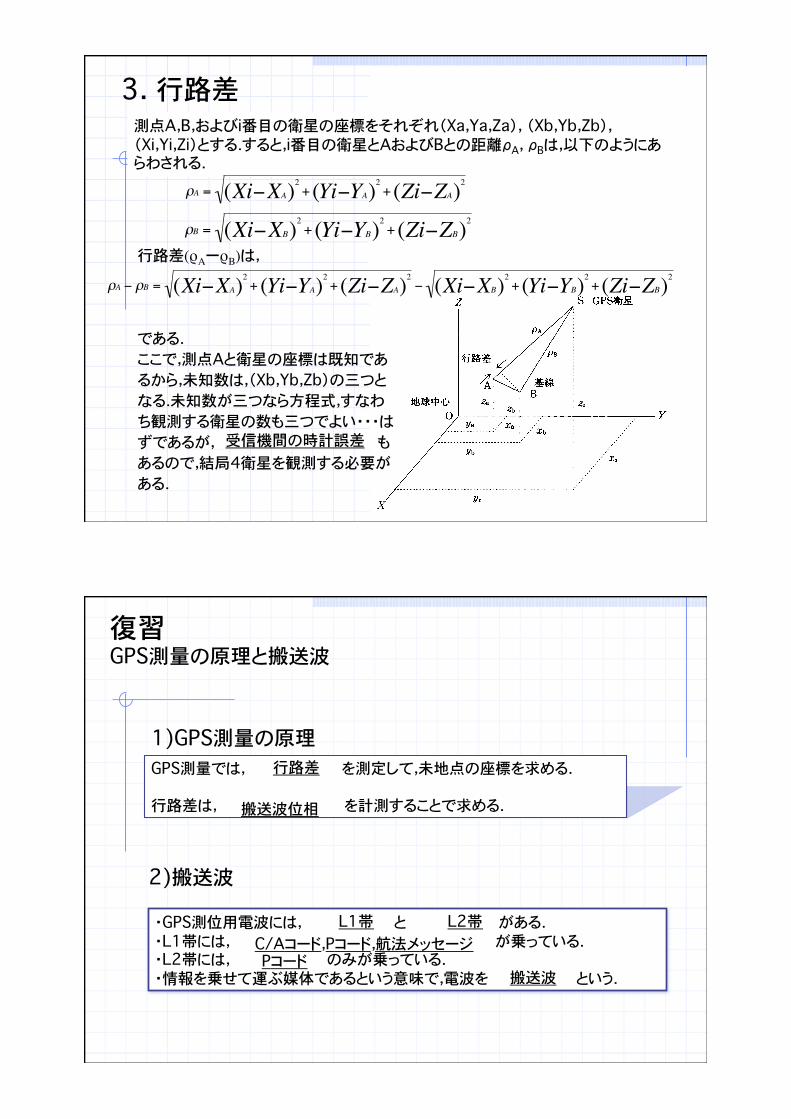
3.�行路差�測点A,B,およびi番目の衛星の座標をそれぞれ(Xa,Ya,Za), (Xb,Yb,Zb),(Xi,Yi,Zi)とする.すると,i番目の衛星とAおよびBとの距離ρA, ρBは,以下のようにあらわされる.�
€
ρA =2(Xi−XA) +
2(Yi−YA) +2(Zi−ZA)
€
ρB =2(Xi−XB) +
2(Yi−YB) +2(Zi−ZB)
行路差(ρAーρB)は,
である. ここで,測点Aと衛星の座標は既知であるから,未知数は,(Xb,Yb,Zb)の三つとなる.未知数が三つなら方程式,すなわち観測する衛星の数も三つでよい・・・はずであるが,��������� �もあるので,結局4衛星を観測する必要がある.�
€
ρA − ρB =2(Xi−XA) +
2(Yi−YA) +2(Zi−ZA) −
2(Xi−XB) +2(Yi−YB) +
2(Zi−ZB)
受信機間の時計誤差�
復習��GPS測量の原理と搬送波 �
GPS測量では,��� ��を測定して,未地点の座標を求める.
行路差は,�� �����を計測することで求める.�
1)GPS測量の原理�
・GPS測位用電波には, � ����と �����がある.�・L1帯には,�� ������������������が乗っている.�・L2帯には,��� ���のみが乗っている.�・情報を乗せて運ぶ媒体であるという意味で,電波を���� �という.�
2)搬送波�
行路差�
搬送波位相�
L1帯� L2帯�C/Aコード,Pコード,航法メッセージ�Pコード�
搬送波�
4.�搬送波位相�
搬送波位相とは,電波の山や谷における位置を角度で表わした言葉である.�電波の位相は, ��������������������で表される.�GPS測量では,もっぱら����� �が使われる.�
GPS測量の受信機は1/100の位まで波数を測れる.�L1帯の1波長は,約19cmであるから,1.9mmの精度で距離を測れる!�
この位置の搬送波位相は,�である.�
(度)��180°�ラジアン�π�サイクル�0.5
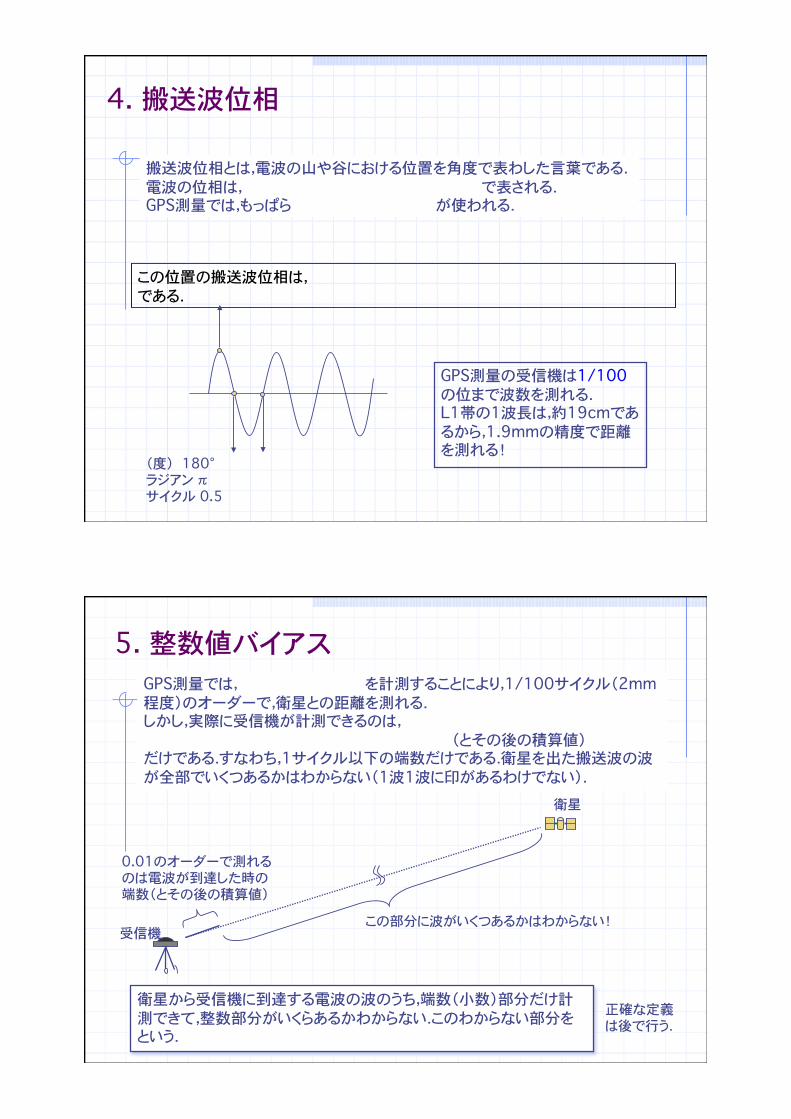
5.�整数値バイアス�GPS測量では,��� ����を計測することにより,1/100サイクル(2mm程度)のオーダーで,衛星との距離を測れる.�しかし,実際に受信機が計測できるのは,������������ ���������(とその後の積算値)�だけである.すなわち,1サイクル以下の端数だけである.衛星を出た搬送波の波が全部でいくつあるかはわからない(1波1波に印があるわけでない).�
衛星から受信機に到達する電波の波のうち,端数(小数)部分だけ計測できて,整数部分がいくらあるかわからない.このわからない部分を����������������という.�
衛星�
0.01のオーダーで測れるのは電波が到達した時の端数(とその後の積算値)�
この部分に波がいくつあるかはわからない! �受信機�
正確な定義は後で行う.�
6.�GPS測量における多重解�
衛星までの波数は不明.これが整数値バイアスでる.�GPS測量では整数値バイアスのため,行路差が1波長違うごとに,異なる未知点座標の候補があらわれる.これを多重解という.�
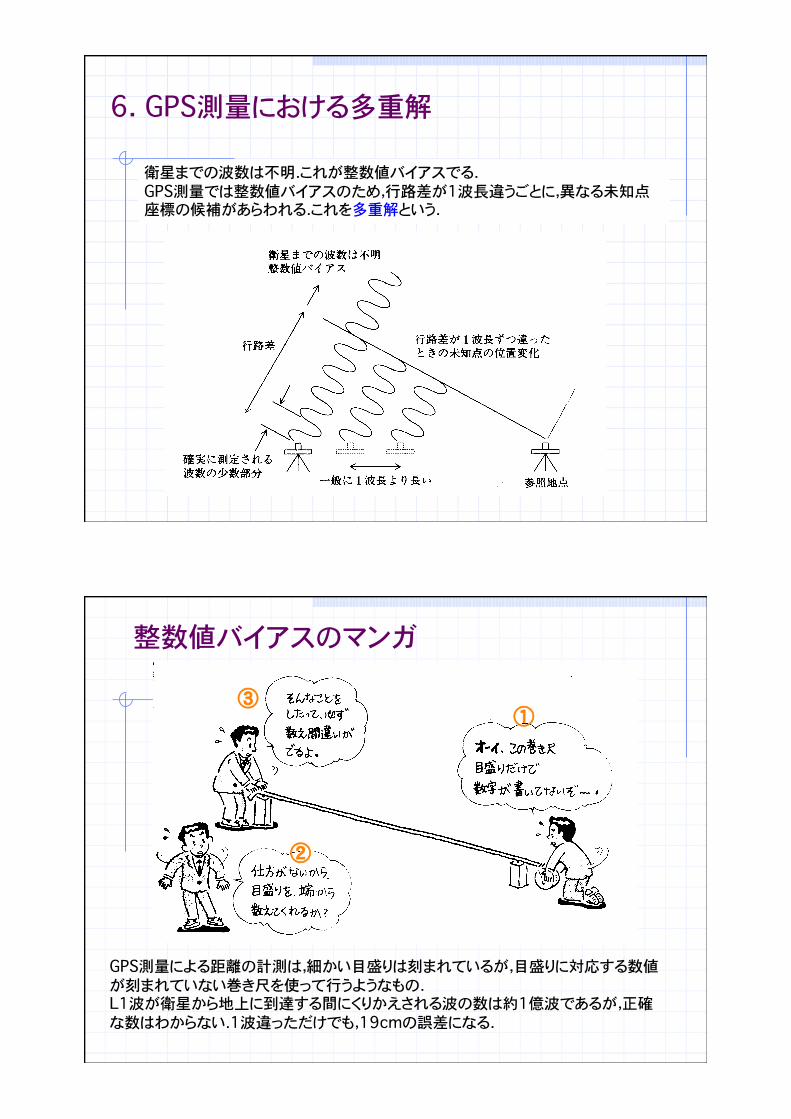
整数値バイアスのマンガ�
②
③ ①
GPS測量による距離の計測は,細かい目盛りは刻まれているが,目盛りに対応する数値が刻まれていない巻き尺を使って行うようなもの.�L1波が衛星から地上に到達する間にくりかえされる波の数は約1億波であるが,正確な数はわからない.1波違っただけでも,19cmの誤差になる.�
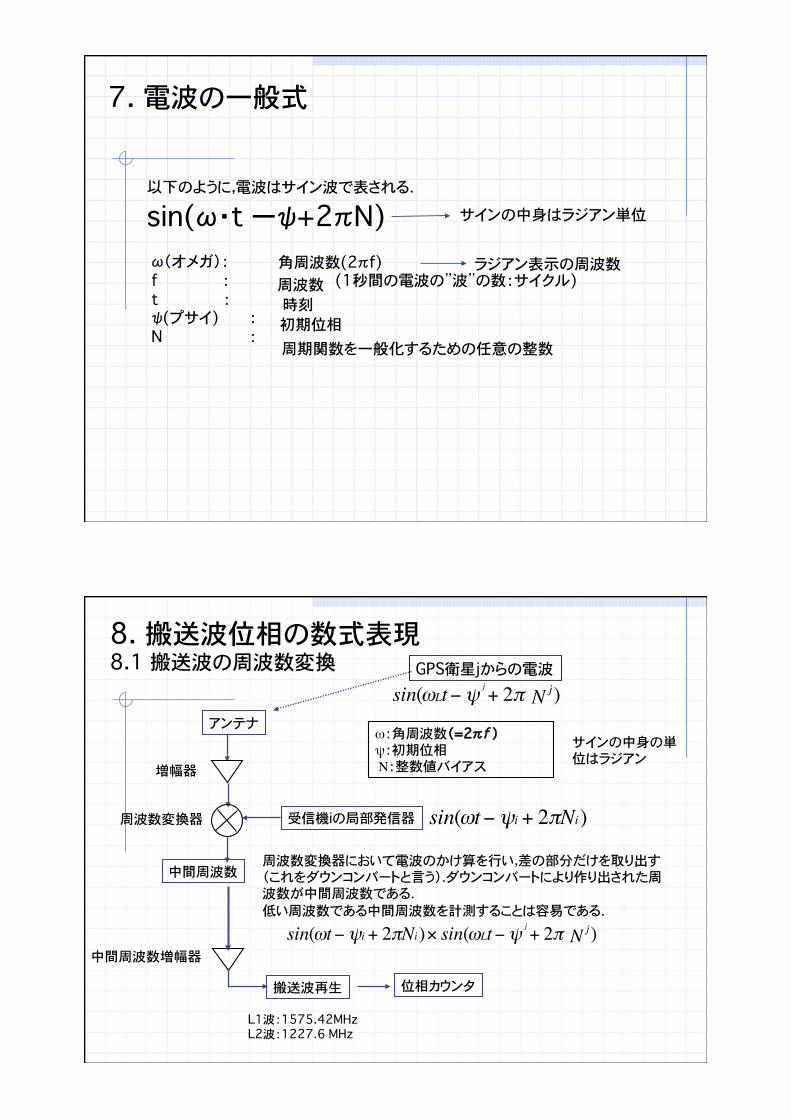
以下のように,電波はサイン波で表される.�
�ω(オメガ):��f : �� ���(1秒間の電波の”波”の数:サイクル)��t :��ψ(プサイ)� �:��N� �:�
7.�電波の一般式�
ラジアン表示の周波数�
サインの中身はラジアン単位�sin(ω・t ーψ+2πN)�角周波数(2πf)�周波数�時刻�初期位相�
周期関数を一般化するための任意の整数�
8.�搬送波位相の数式表現�8.1�搬送波の周波数変換�
アンテナ�
増幅器�
位相カウンタ�搬送波再生�
中間周波数増幅器�
受信機iの局部発信器�周波数変換器�
GPS衛星jからの電波�
中間周波数�
ω:角周波数(=2πf )�ψ:初期位相 N:整数値バイアス�
€
sin(ωt− ψi + 2πNi)€
sin(ωLt− jψ + 2π jN )
€
sin(ωt− ψi + 2πNi)× sin(ωLt− jψ + 2π jN )
周波数変換器において電波のかけ算を行い,差の部分だけを取り出す(これをダウンコンバートと言う).ダウンコンバートにより作り出された周波数が中間周波数である. 低い周波数である中間周波数を計測することは容易である.�
サインの中身の単位はラジアン�
L1波:1575.42MHz�L2波:1227.6 MHz�
€
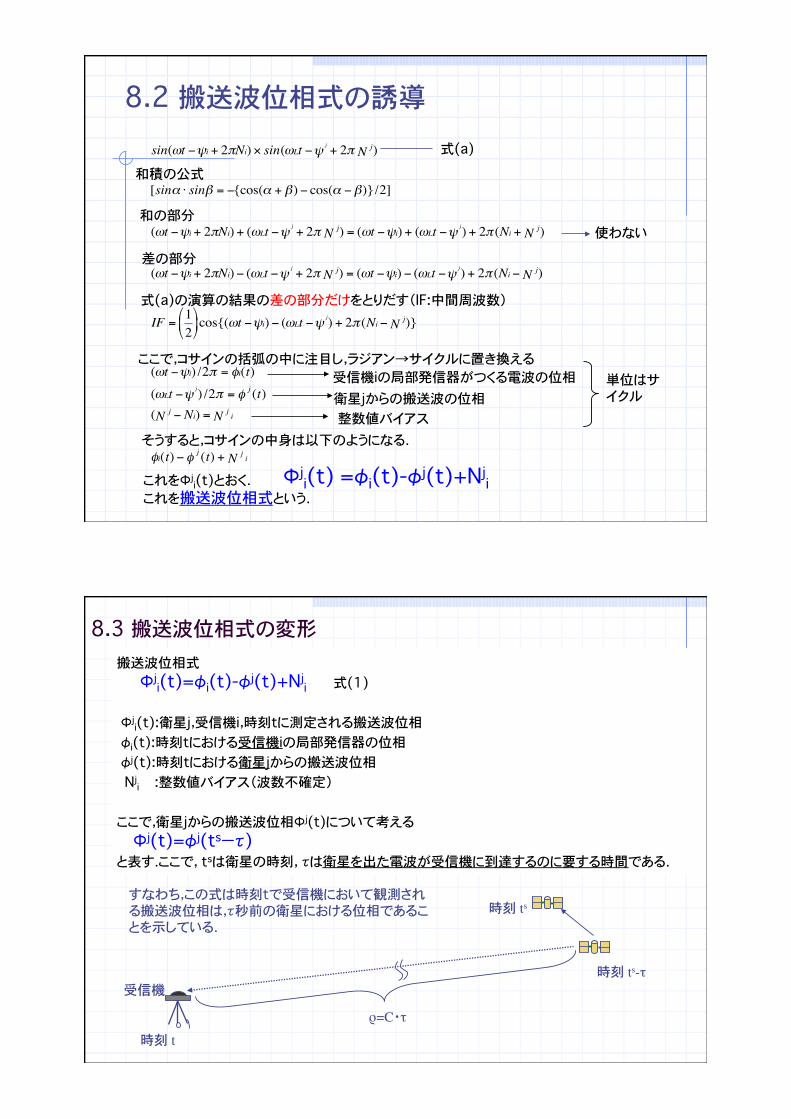
sin(ωt −ψi + 2πNi)× sin(ωLt − jψ + 2π jN )
[sinα ⋅ sinβ = −{cos(α + β) − cos(α −β)}/2]
(ωt −ψi + 2πNi)+ (ωLt − jψ + 2π jN ) = (ωt −ψi) + (ωLt − j
ψ ) + 2π (Ni + jN )
(ωt −ψi + 2πNi)− (ωLt − jψ + 2π jN ) = (ωt −ψi) − (ωLt − j
ψ ) + 2π (Ni − jN )
IF =12
cos{(ωt −ψi) − (ωLt − j
ψ ) + 2π (Ni − jN )}
(ωt −ψi) /2π = φi(t)(ωLt − j
ψ ) /2π = jφ (t)( jN − Ni) = jN i
φi(t) − jφ (t) + jN i
和積の公式�
和の部分�
差の部分�
式(a)�
式(a)の演算の結果の差の部分だけをとりだす(IF:中間周波数)�
ここで,コサインの括弧の中に注目し,ラジアン→サイクルに置き換える�
そうすると,コサインの中身は以下のようになる.�
衛星jからの搬送波の位相�
受信機iの局部発信器がつくる電波の位相�
整数値バイアス�
単位はサイクル�
8.2�搬送波位相式の誘導�
使わない�
これをΦji(t)とおく. ��これを搬送波位相式という.�
Φji(t) =φi(t)-φj(t)+Nji �
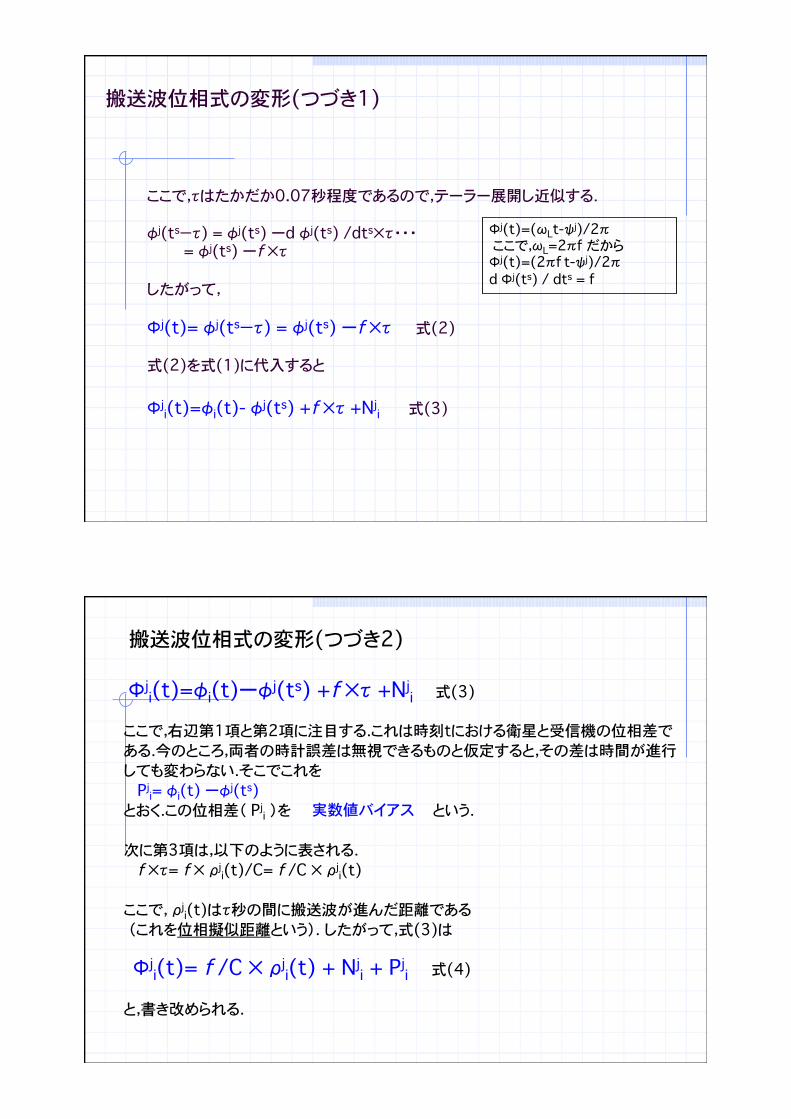
8.3�搬送波位相式の変形�搬送波位相式������������������ 式(1)�
�Φji(t):衛星j,受信機i,時刻tに測定される搬送波位相 ��φi(t):時刻tにおける受信機iの局部発信器の位相��φj(t):時刻tにおける衛星jからの搬送波位相�� Nji :整数値バイアス(波数不確定)�
ここで,衛星jからの搬送波位相Φj(t)について考える �����Φj(t)=φj(ts-τ) �と表す.ここで, tsは衛星の時刻, τは衛星を出た電波が受信機に到達するのに要する時間である.�
すなわち,この式は時刻tで受信機において観測される搬送波位相は,τ秒前の衛星における位相であることを示している.�
ρ=C・τ
受信機�時刻 ts-τ
時刻 t
時刻 ts
Φji(t)=φi(t)-φj(t)+Nji��
搬送波位相式の変形(つづき1) �
ここで,τはたかだか0.07秒程度であるので,テーラー展開し近似する.�
φj(ts-τ) = φj(ts) ーd φj(ts) /dts×τ・・・������� �= φj(ts) ーf ×τ�
したがって,�
Φj(t)= φj(ts-τ) = φj(ts) ーf ×τ 式(2)�
式(2)を式(1)に代入すると�
Φji(t)=φi(t)- φj(ts) +f ×τ +Nji�� 式(3)�
Φj(t)=(ωLt-ψj)/2π� ここで,ωL=2πf�だから�Φj(t)=(2πf t-ψj)/2π�d Φj(ts) / dts = f�
搬送波位相式の変形(つづき2) �
�Φji(t)=φi(t)ーφj(ts) +f ×τ +Nji�� 式(3)�
ここで,右辺第1項と第2項に注目する.これは時刻tにおける衛星と受信機の位相差である.今のところ,両者の時計誤差は無視できるものと仮定すると,その差は時間が進行しても変わらない.そこでこれを ����Pji= φi(t) ーφj(ts) ��とおく.この位相差( Pji )を������� �����という.�
次に第3項は,以下のように表される.����f ×τ= f × ρji(t)/C= f /C × ρji(t) �
ここで, ρji(t)はτ秒の間に搬送波が進んだ距離である ��(これを位相擬似距離という).�したがって,式(3)は�
��Φji(t)= f /C × ρji(t) + Nji�+ Pji�����式(4) �
と,書き改められる.�
実数値バイアス�
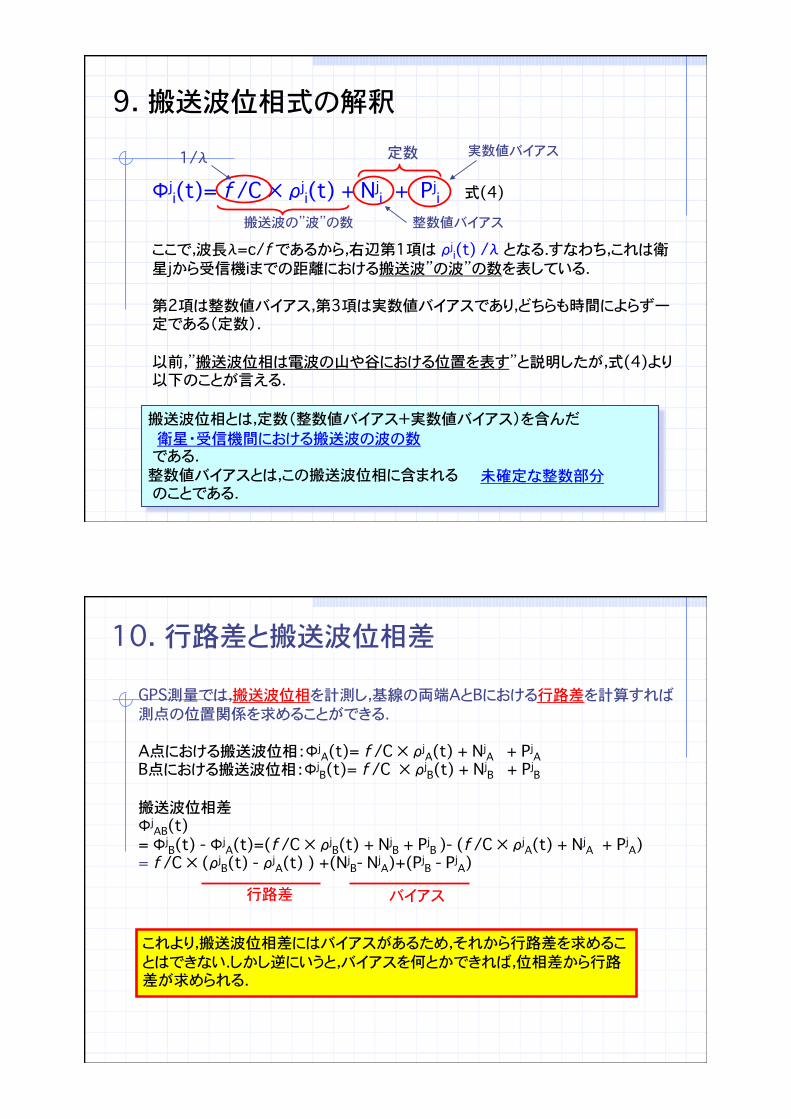
9.�搬送波位相式の解釈�
Φji(t)= f /C × ρji(t) + Nji��+ �Pji�����式(4) �
ここで,波長λ=c/f であるから,右辺第1項は�ρji(t) /λ�となる.すなわち,これは衛星jから受信機iまでの距離における搬送波”の波”の数を表している.�
第2項は整数値バイアス,第3項は実数値バイアスであり,どちらも時間によらず一定である(定数).�
以前,”搬送波位相は電波の山や谷における位置を表す”と説明したが,式(4)より以下のことが言える.�
搬送波位相とは,定数(整数値バイアス+実数値バイアス)を含んだ�������������
�である.�整数値バイアスとは,この搬送波位相に含まれる������������ �のことである.�
実数値バイアス�
搬送波の”波”の数� 整数値バイアス�
定数�1/λ�
衛星・受信機間における搬送波の波の数�
未確定な整数部分�
10.�行路差と搬送波位相差�
GPS測量では,搬送波位相を計測し,基線の両端AとBにおける行路差を計算すれば測点の位置関係を求めることができる.�
A点における搬送波位相:ΦjA(t)= f /C × ρjA(t) + NjA + PjA�B点における搬送波位相:ΦjB(t)= f /C × ρjB(t) + NjB� + PjB�
搬送波位相差�ΦjAB(t) �= ΦjB(t) - ΦjA(t)=(f /C × ρjB(t) + NjB + PjB )- (f /C × ρjA(t) + NjA + PjA)�= f /C × (ρjB(t) - ρjA(t) ) +(NjB- NjA)+(PjB - PjA)
行路差� バイアス�
これより,搬送波位相差にはバイアスがあるため,それから行路差を求めることはできない.しかし逆にいうと,バイアスを何とかできれば,位相差から行路差が求められる.�
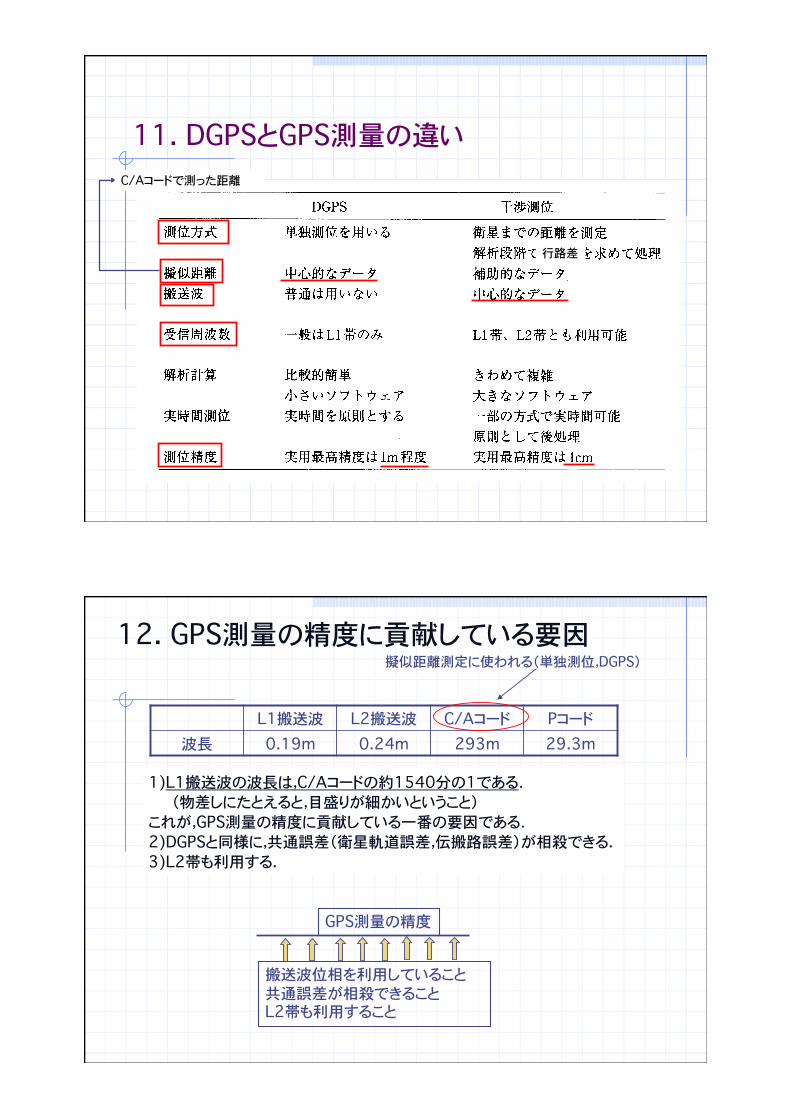
11.�DGPSとGPS測量の違い�C/Aコードで測った距離 �
行路差�
L1搬送波� L2搬送波� C/Aコード� Pコード�
波長� 0.19m� 0.24m� 293m� 29.3m�
12.�GPS測量の精度に貢献している要因�
1)L1搬送波の波長は,C/Aコードの約1540分の1である.������(物差しにたとえると,目盛りが細かいということ) �これが,GPS測量の精度に貢献している一番の要因である.�2)DGPSと同様に,共通誤差(衛星軌道誤差,伝搬路誤差)が相殺できる.�3)L2帯も利用する.
搬送波位相を利用していること�共通誤差が相殺できること�L2帯も利用すること�
GPS測量の精度�
擬似距離測定に使われる(単独測位,DGPS)�














![11章 電波伝搬4 群-2 編-11 章 4群 - 2編 - 11章 11-1 電波伝搬の概要 (執筆者:今井哲朗)[2010年5月 受領] 地球上の伝搬媒質は大地,対流圏,電離圏に大別でき,それらは電波の周波数に依存して](https://img.pdfslide.tips/doc/110x75/601dd04a17844c10522b01d4/11c-e-4-ci2-ci11-c-4c-2c-11c-11-1-ee.jpg)














