Embed Size (px)
Citation preview

โครงงานคอมพวเตอรประเภทซอฟตแวร
เรอง Triple P Robot
จดท าโดย
เดกหญง เพญนภา ทองชชวย เดกหญง พลอยวรนทร บญหอม
เดกชาย บรนทรพศ เดนหมด
ชนมธยมศกษาตอนตน โรงเรยนสะเดา“ขรรคชยกมพลานนทอนสรณ”
สงกดส านกงานเขตพนทการศกษามธยมศกษาเขต16
รายงานฉบบนเปนสวนประกอบของโครงงานคอมพวเตอรประเภทซอฟตแวร เนองในงานศลปหตถกรรมนกเรยน ครงท 68 ปการศกษา 2561
ระดบ เขต ภาค
เรอง Triple P Robot
โดย เดกหญง เพญนภา ทองชชวย
เดกหญง พลอยวรนทร บญหอม เดกชาย บรนทรพศ เดนหมด
ชนมธยมศกษาตอนตน โรงเรยนสะเดา“ขรรคชยกมพลานนทอนสรณ”
สงกดส านกงานเขตพนทการศกษามธยมศกษาเขต16
ครทปรกษา 1.นางสาว พนนทา วงศจนดา 2.นางสาว ธมนวรรณ อมา
ทปรกษาพเศษ นาย ประภาส ก าลงเกอ เจาหนาทบรษท CAT
กตตกรรมประกาศ
โครงงานฉบบนส าเรจลลวงไปไดกดวยความชวยเหลออยางดยงจาก อาจารย พนนทา วงศจนดา
และอาจารยธมนวรรณ อมา อาจารยทปรกษาโครงงานคอมพวเตอร ทไดใหค าแนะน าและขอคดเหนตางๆ
ในการจดท ามาโดยตลอด จนโครงงานเลมนเสรจสมบรณ ผจดท าจงขอขอบพระคณเปนอยางสง
ขอขอบคณนาย ประภาส ก าลงเกอ ทปรกษาพเศษ ทไดใหค าแนะน าแนวทางปรบปรงและแกไข
เกยวกบโปรแกรมเพอประกอบการท าโครงงาน
ขอขอบคณเจาหนาทจากบรษท CAT ทกทานทกรณาใหค าแนะน าทเปนประโยชน ตลอดจนคณะ
ครทกทานทไมไดกลาวนามไว ณ ทน
คณะผจดท า
บทคดยอ
โครงงานคอมพว เตอ รประ เภทซอฟตแว ร เ รอง Triple P Robot เ ปนโครงงานเ ก ยวกบปญญาประดษฐ จดท าขนโดยมวตถประสงคคอ 1) เพอศกษาการท างานของโปรแกรม Lego mindstorm ev3 2) เพอออกแบบจ าลองหนยนตเกบขยะชอ Triple P Robot เครองมอทใชในการจดท าโครงงานครงน ไดแก เครองคอมพวเตอรพรอมเชอมตอระบบเครอขายอนเตอรเนต โปรแกรมทใชในการด าเนนงาน
คอ โปรแกรม Lego mindstorm ev3 และอปกรณทใชในการพฒนาหนยนต เชน มอเตอรหนยนต,
เครอง ev3 brick, Touch เปนตน
ผลทไดจากการศกษาการท างานของโปรแกรม Lego mindstorm ev3 ท าใหสามารถเขยนชดค าสงควบคมการท างาน เพอใหหนยนตสามารถเคลอนทไปมา ตรวจจบว ตถ อปกรณหรอสงกดขวาง
และท าความสะอาดพนททมขยะ ซงสามารถน าไปใชประโยชนในชวตประจ าวนไดจรง

สารบญ
หนาท
บทคดยอ
กตตกรรมประกาศ
บทท 1 บทน า 1
บทท 2 เอกสารและงานวจยทเกยวของ 3
บทท 3 วธการด าเนนงาน 7
บทท 4 ผลการด าเนนงาน 10
บทท 5 สรปผลการด าเนนงาน อภปรายผลการด าเนนงาน 11
บรรณานกรม 12
ภาคผนวก 13

สารบญรปภาพ
รปท หนาท
รปภาพท 1 ผงงานแสดงขนตอนการด าเนนงาน 8
รปภาพท 2 ภาพแบบรางหนยนต 9
รปภาพท 3 ภาพหนยนต Triple P Robot ทพรอมใชงาน 10
บทท 1
บทน า
ทมาและความส าคญ ในอดตมนษยใชชวตแตกตางกบปจจบน ไมมสงอ านวยความสะดวกและเทคโนโลยทกาวไกลเหมอนปจจบน ซงในอดตยงไมมระบบอนเทอรเนตและมนษยยงไมรจกหนยนต จงท าใหไมมความสะดวกสบายในการด าเนนชวตเหมอนปจจบน ในปจจบนประเทศไทยเขาสยค4.0 มนวตกรรมทกาวไกลล าสมย เราจงตองเทาทนกบเทคโนโลยเพอท าใหเทคโนโลยมคณคาใหคนไดเหนศกยภาพของเทคโนโลย 4.0 ในปจจบนเทคโนโลยไดเขามาเปนสวนหนงในชวตประจ าวนของมนษย กลาวคอ มนษยไดสรางหนยนตขนมาเพออ านวยความสะดวกขนและหนยนตเขามามสวนรวมในการชวยเหลอตางๆ หนยนตทมประสทธภาพมากกยอมมราคาแพงและใชเวลายาวนานในการสราง ซงในโลกนมปญหามากมายทงปญหาสงแวดลอมปญหามลพษปญหาขยะและอนๆ ทางเราเหนวาปญหาขยะเปนปญหาทส าคญมาก เราจงไดสรางหนยนตเกบกวาดขยะขนมาเพออ านวยความสะดวกในชวตประจ าวน สถานศกษาจงเปนสวนส าคญในการอ านวยความสะดวกแกครและนกเรยนเพอใชเทคโนโลยไดอยางเหมาะสมและทนเหตการณ ดงน นหนยนตจงมความส าคญเปนอยางมากในปจจบน เราไดศกษาการสรางหนยนตจากอนเทอรเนตและเจาหนาทจากบรษท CAT ไดมาใหความรในการเขยนโปรแกรมจงน าความรทไดไปตอยอดใหเกดประโยชนโดยการออกแบบหนยนตและเขยนโปรแกรม จนพบวาหนยนตนนมประโยชนจรงๆ ปจจบนมนษยไดท างานหนก เราจงไดคดคนหนยนตท าความสะอาดเพออ านวยความสะดวกโดยแบงเบา
ภาระของมนษย ในปทผานมาเราไดท าโครงงาน Amazing Robot ซงมขอบกพรองคอไมสามารถหลบสงกดขวางได ทางเราจงปรบปรงแกไขและตอยอดจนเกดเปนโครงงาน Triple P Robot เปนโครงงานประเภทปญญาประดษฐ ซงมศกยภาพในการเกบกวาดขยะสามารถท างานไดมากขน วตถประสงคของโครงงาน
1. เพอศกษาการท างานของโปรแกรม Lego mindstorm ev3
2. เพอออกแบบจ าลองหนยนตเกบกวาดขยะชอ Triple P Robot
ขอบเขตการศกษา
1.ออกแบบสรางและทดสอบสมรรถนะในการท างานของหนยนตท าความสะอาด
เครองมอหรอโปรแกรมทใชพฒนา ไดแก - เครองคอมพวเตอร พรอมเชอมตอระบบเครอขายอนเทอรเนต
- โปรแกรม Lego mindstorm ev3
- อปกรณทใชในการพฒนาหนยนต เชน มอเตอรหนยนต, เครอง ev3 brick, Touch sensor Ultrasonic sensor, color senser และmedium motor - อปกรณทใชในการประกอบทโกยขยะ ไดแก กระดาษลง, ไมบรรทด, คตเตอร, เทปกาว ผลทคาดวาจะไดรบ
1. สามารถสรางชดค าสงจากโปรแกรม Lego mindstorm ev3 ได
2. ไดรบความรเกยวกบหนยนต 3. เพอเปนแนวทางในการประดษฐเครองดดฝ นทสามารถใชไดในหองเรยน 4. สามารถน าความรทไดจากการศกษาเรองหนยนตไปใชในการสรางและพฒนาหนยนตในดานอนๆ
เชน หนยนตสแกนบตรประกนจาน หนยนตเกบขยะ เปนตน
5. สามารถน าหนยนต Triple P Robot ไปใชกวาดขยะในหองเรยนได
6. ฝกทกษะความคดรเรมทแสดงออกอยางมหลกเกณฑ มความคงทน และสามารถดดแปลงพฒนาไปจนถงจดทสมบรณได
บทท 2
เอกสารและงานวจยทเกยวของ
โครงงาน Triple P Robot ไดท าการศกษาเอกสารและงานวจยทเกยวของ ดงหวขอตอไปน
2.1 ปญญาประดษฐคออะไร 2.2 ความหมายของหนยนต
2.3 ประเภทของหนยนต 2.4 ประโยชนของหนยนต
2.5 ความรเบองตนเกยวกบ Lego mindstorm ev3 ปญญาประดษฐคออะไร ?
ปญญาประดษฐ (Artificial Intelligence) หรอ เอไอ (AI) หมายถงความฉลาดเทยมทสรางขน
ใหกบสงทไมมชวต ปญญาประดษฐเปนสาขาหนงในดานวทยาการคอมพวเตอร และวศวกรรมเปนหลก แต
ยงรวมถงศาสตรในดานอน ๆ อยางจตวทยา ปรชญา หรอชววทยา ซงสาขาปญญาประดษฐเปนการเรยนร
เกยวกบกระบวนการการคด การกระท า การใหเหตผล การปรบตว หรอการอนมาน และการท างานของ
สมอง
ความหมายของหนยนต
หนยนต คอ คอเครองจกรกลชนดหนง มลกษณะโครงสรางและรปรางแตกตางกน หนยนตในแต
ละประเภทจะมหนาทการท างานในดานตาง ๆ ตามการควบคมโดยตรงของมนษย การควบคมระบบตางๆ
ในการสงงานระหวางหนยนตและมนษย สามารถท าไดโดยทางออมและอตโนมต โดยทวไปหนยนตถก
สรางขนเพอส าหรบงานทมความยากล าบาก เชน งานส ารวจในพนทบรเวณแคบหรองานส ารวจดวงจนทร
ดาวเคราะหทไมมสงมชวต
ปจจบนเทคโนโลยของหนยนตเจรญกาวหนาอยางรวดเรว เรมเขามามบทบาทกบชวตของมนษยใน
ดานตางๆ เชน ดานอตสาหกรรมการผลต แตกตางจากเมอกอนทหนยนตมกถกน าไปใช ในงานอตสาหกรรม
เปนสวนใหญ ปจจบนมการน าหนยนตมาใชงานมากขน เชน หนยนตทใชในทางการแพทย หนยนตส าหรบ
งานส ารวจ หนยนตทใชงานในอวกาศ หรอแมแตหนยนตทถกสรางขนเพอเปนเครองเลนของมนษย
จนกระทงในปจจบนนไดมการพฒนาใหหนยนตนนมลกษณะทคลายมนษย เพอใหอาศยอยรวมกนกบ
มนษย ใหไดในชวตประจ าวน
ประเภทของหนยนต
หนยนตอาจถกแบงออกเปน 3 ประเภทตามลกษณะการใชงาน คอ
1.หนยนตชนดทตดตงอยกบท (fixed robot) เปนหนยนตทไมสามารถเคลอนทไปไหนไดดวยตวเอง มลกษณะเปนแขนกล สามารถขยบและเคลอนไหวไดเฉพาะแตละขอตอ ภายในตวเองเทานน มก
น าไปใชในโรงงานอตสาหกรรม เชน โรงงานประกอบรถยนต
2.หนยนตชนดทเคลอนทได (mobile robot) หนยนตประเภทนจะแตกตางจากหนยนตทตดตงอยกบท เพราะสามารถเคลอนทไปไหนมาไหนไดดวยตวเอง โดยการใชลอหรอการใชขา ซงหนยนตประเภทน
ปจจบนยงเปนงานวจยทท าการศกษาอยภายในหองทดลอง เพอพฒนาหนยนตออกมาใชงานในรปแบบตาง
ๆ เชน หนยนตส ารวจดาวองคาร ขององคการนาซา เปนตน
3.หนยนตอตสาหกรรม ตามความหมายของ ISO 8373:2012: หมายถง การควบคมอตโนมต ความสามารถในการถกตงโปรแกรมหรอการตงคาการท างานไดอยางหลากหลายดวยระบบตงแต 3 แกนขนไป สามารถเปนไดทงรปแบบตดตงและรปแบบทสามารถเคลอนยายได โดยสามารถจ าแนกประเภทไดตามลกษณะโครงสรางดงน
SCARA หนยนตทมความโดดเดนเรองความคลองแคลวรวดเรวแตมขอจ ากดส าหรบระยะการ
ปฏบตการณ มขอตอขนานกน 2 จด เหมาะกบงานประกอบชนสวนทตองการความรวดเรวและมขนาดเลก
สงส าคญส าหรบการใชงาน SCARA คอ การออกแบบระบบทตองการความแมนย าสงจากการค านวณ
รปแบบการท างาน สามารถใชงานไดดกบอตสาหกรรมชนสวนอเลกทรอนกส
Parallel Robot หรอเรยกอกชอหนงวา Delta Robot เปนหนยนตทมลกษณะคลายคลงกบแมง
มม ใชการขยบในรปทรงเรขาคณตมจดเดนในการขยบและจบชนสวนไดอยางแผวเบาท างานไดอยางอสระ
ภายใตแกน X Y และ Z เหมาะส าหรบอตสาหกรรมอาหารและบรรจภณฑ
Linear Robot คอ หนยนตทท างานบนแกนตงฉากซงหมายรวมถงหนยนตแบบ Cartesian และ
Gantry เอาไวดวยกน โดยสามารถท างานไดบน 3 แกน X Y และ Z ดวยการเคลอนทแนวตรงท าใหการ
ท างานมความแมนย าสงและออกแบบการท างานไดงาย มความแขงแกรงทนทานเนองจากมระยะการใชงาน
ทแนนอน นยมใชในการหยบจบเพอท าการประกอบ เชน การประกอบชนสวนอเลกทรอนกส หรอตดชนสวนยานยนตดวยสารเคม
Cylindrical Robot หนยนตทมขอตอโรตารอยางนอย 1 จดทฐานเพอท าการหมนปรบทศทาง
แขนจบวตถเคลอนทขนลงดวยกระบอกนวแมตก นยมใชในงานประกอบชนสวน วธการเชอมจด รวมถง
การจดการเคลองมอกล
Articulated Robot หนยนตทประกอบดวยขอตอโรตารตง 3 จดขนไปและอาจมมากไดถง 10 จด
โดยมากมกพบเจอ Articulated Robot แบบ 6 แกน สามารถใชในสายการผลตไดอยางหลากหลายดวยมต
องศาการท างานทคอนขางเปนอสระ รวมถงความสามารถในการประยกตใชงานไดตามลกษณะของ
สายการผลตไดอยางเหมาะสม รองรบขนาดชนสวนไดหลากหลายขนกบศกยภาพของรนจากแตละผผลต
Polar Robot หรอ Spherical Robot หนยนตทประกอบดวยขอตอโรตารอยางนอย 2 จด และ
จดเชอมตอแบบขนานอยางนอย 1 จด การท างานเปนรปแบบตายตวเนองจากมมมขยบและมตองศาทถก
ก าหนดไวอยแลว
ประโยชนของหนยนต
1. ดานการเเพทย ในดานการแพทย มการเรมน าเอาหนยนตแขนกลเขามาในการชวยท าการผาตด เนองจากหนยนตสามารถท างานทมความละเอยดสงเกนกวามนษยจะท า เชน การเอาหนยนตมาใชในการผาตดสมอง ซงมความจ าเปนมากในความละเอยดในการผาตด หนยนตแขนกลจงเปนสวนหนงในการผาตดดานการแพทย การท างานของหนยนตแขนกลในการผาตด จะมลกษณะควบคมการท างานการผาตดโดยผานทางแพทย ในการผาตดโดยมหนยนตแขนกลเขามามสวนรวมจะเนนเรองความปลอดภย
2. ดานงานวจย หนยนตสามารถท าการส ารวจงานวจยทางดานวทยาศาสตรรวมกบมนษย เชน การส ารวจทองทะเลทมความลกเปนอยางมาก หรอการส ารวจบรเวณปากปลองภเขาไฟ ซงเปนงานเสยงอนตรายทมนษยทไมสามารถปฏบตงานส ารวจเชนนได ท าใหปจจบนมการพฒนาหนยนตเพอใชในงานวจยและส ารวจ เพอใหหนยนตสามารถทนตอสภาพแวดลอมและสามารถท าการควบคมหนยนตไดในระยะไกลดวยระบบคอนโทรล โดยมเซนเซอรตดตงทตวหนยนตเพอใชในการวดระยะทางและเกบขอมลในสวนตาง ๆ ทางดานวทยาศาสตร
3. ดานอตสาหกรรม หนยนตเรมมบทบาททางดานเทคโนโลยอตสาหกรรมในขณะทงานดานอตสาหกรรม มความตองการดานแรงงานเปนอยางมาก การจางแรงงานจ านวนมากเพอใชในงานอตสาหกรรม ท าใหตนทนการผลตของแตละโรงงานอตสาหกรรม เพมจ านวนสงขน และงานอตสาหกรรม
บางงานไมสามารถทจะใชแรงงงานเขาไปท าได ซงบางงานนนอนตรายและมความเสยงเปนอยางมาก หรอเปนงานทตองการความรวดเรวและแมนย าในการผลตรวมทงเปนการประหยดระยะเวลา ท าใหหนยนตกลายเปนทางออกของงานดานอตสาหกรรมเเละยงมดานอนๆอก เชน ดานครวเรอน ดานบนเทง ดานความมนคง
4. ความสามารถในดานความมนคง อาจจะสรางเครองบนสอดแนมผกอการราย โดยตดตงเรดาร
คอยตรวจจบเหตทอาจไมชอบมาพากล
5. ความสามารถในดานบนเทง หนยนตประเภทนไดรบการพฒนาใหสามารถตอบโตกบคนได
เสมอนเปนเพอน เลนหรอสตวเลยง ซงมในรปแบบของสนข แมว และแมลง เปนตน หรอกระทงสรางความ
บนเทงทางเพศใหกบมนษยไดอกดวย
6. ความสามารถในงานครวเรอน ท างานในบานแทนมนษย อ านวยความสะดวกภายในบาน
ทดแทนแรงงานมความปลอดภยไมตองจางแรงงาน หนยนตเปนจนตนาการของมนษยทถายทอดผานเรอง
แตงตาง ๆ ซงปรากฏใน นยายวทยาศาสตร การตน และ ภาพยนตร และเปนทรจกอยางแพรหลาย เชน เจา
หนอะตอม (Astro Boy) โดราเอมอน (Doraemon) กนดม (Gundum) โรโบคอป (RoboCop)
ความรเบองตนเกยวกบ Lego mindstorm ev3
โปรแกรม Lego mindstorm ev3 เปนโปรแกรมทใชเชอมตอกบหนยนตเพอใชสงารใหหนยนตท าตามความตองการของผใช โดยผใชจะตองเลอกชดค าสงแลวน าไปใสในหนาใสค าสงของหนยนต เมอผใชน าไปวางเรยบรอยแลว ผใชกจะตองโหลดชดค าสงทงหมดลงในตวหนยนต แลวหนยนตกจะท าตาม
ค าสงทผใชเลอกมาใส ซงโปรแกรม Lego mindstorm ev3 เปนโปรแกรมทส าเรจรปสามารถน าชดค าสงมาใชงานไดเลย งายตอการใชงานกบหนยนต แตมขอจ ากดของโปรแกรมคอ จะสามารถใชไดกบหนยนต
Lego mindstorm ev3 เทานน ทางคณะผจดท าจงใชความรทศกษามาขางตน น ามาพฒนาเปนหนยนตเกบขยะ ชอ Triple P Robot ซงเปนโครงงานประเภทซอฟทแวร ปญญาประดษฐ และเปนหนยนตประเภทเคลอนทได และมประโยชนในดานท าความสะอาดภายในครวเรอน หรอบรเวณทเปนทรมน าไมขง
บทท 3
วธการด าเนนงาน
3.1 วธการด าเนนงาน
3.1.1 เครองมอ วสด อปกรณ
3.1.1.1 เครองคอมพวเตอรพรอมเชอมตอระบบเครอขายอนเตอรเนต
3.1.1.2 โปรแกรมทใชในการด าเนนงาน คอ โปรแกรม Lego mindstorm ev3
3.1.1.3 อปกรณทใชในการพฒนาหนยนต เชน มอเตอรหนยนต, เครอง ev3 brick, Touch sensor Ultrasonic sensor, color sensor, medium motor
3.1.1.4 อปกรณทใชในการประกอบทโกยขยะ ไดแก กระดาษลง,ไมบรรทด,คตเตอร,เทปกาว
3.1.2 ขนตอนในการด าเนนงาน 3.1.2.1. คดหวขอโครงงานเพอน าเสนอครทปรกษาโครงงาน
3.1.2.2. ศกษาและคนควาขอมลทเกยวของกบเรองทสนใจคอเรองหนยนตและศกษาคนควาเพมเตมจากเวบไซตตางๆและจดเกบขอมล เพอจดท าเนอหาตอไป
3.1.2.3. ศกษาการสรางหนยนตโดยใชโปรแกรม Lego mindstorm ev3 จากเอกสารและจากเวบไซตตางๆทเสนอเทคนควธการสราง
3.1.2.4. ออกแบบรางหนยนตแลวคดเลอกแบบทดทสด 3.1.2.5. จดท าโครงรางหนยนตเพอน าเสนอครทปรกษา
3.1.2.6. จดท าหนยนตดวยโปรแกรม Lego mindstorm ev3 โดยสรางหนยนตทสนใจตามแบบเสนอโครงรางทเสนอ
3.1.2.7. เขยนโปรแกรมดวยโปรแกรม Lego mindstorm ev3 3.1.2.8. ทดลองเลนโปรแกรม 3.1.2.9. น าเสนอรายงานความกาวหนาใหครทปรกษาโครงงานไดตรวจสอบซงครทปรกษาจะ
ใหขอเสนอแนะตางๆเพอใหจดท าเนอหาและการน าเสนอทนาสนใจทงนเมอไดรบค าแนะน ากจะน ามาปรบปรงแกไขใหเปนทนาสนใจยงขน
3.1.2.10. จดท าเอกสารรายงานโครงงานคอมพวเตอรและคมอการใชงาน 3.1.2.11. น าเสนอโครงงานคอมพวเตอรและน าไปใชงานจรงในหองเรยน
3.2 แผนผงการด าเนนงาน
รปภาพท 1 ผงงานแสดงขนตอนการด าเนนงาน
มปญหาหรอไม
เรมตน
คดหวขอโครงงาน วเคราะหปญหาและขอบกพรองในป2560
น ามาสรปเพอหาแนวทางพฒนาหนยนต
คดหวขอโครงงาน
ศกษาคนควาขอมล
ศกษาการสรางหนยนตดวย Lego mindstorm ev3
ทดลองเลนโปรแกรม
ม
ไมม
น าเสนอรายงานความกาวหนาใหแกครทปรกษา
จดท าเอกสารรายงานโครงงานคอมพวเตอรและคมอการใชงาน
น าเสนอโครงงานคอมพวเตอรและน าไปใชงานจรงในหองเรยน
จบ

3.3 แบบรางหนยนต
รปภาพท 2 ภาพแบบรางหนยนต
บทท 4 ผลการด าเนนงาน
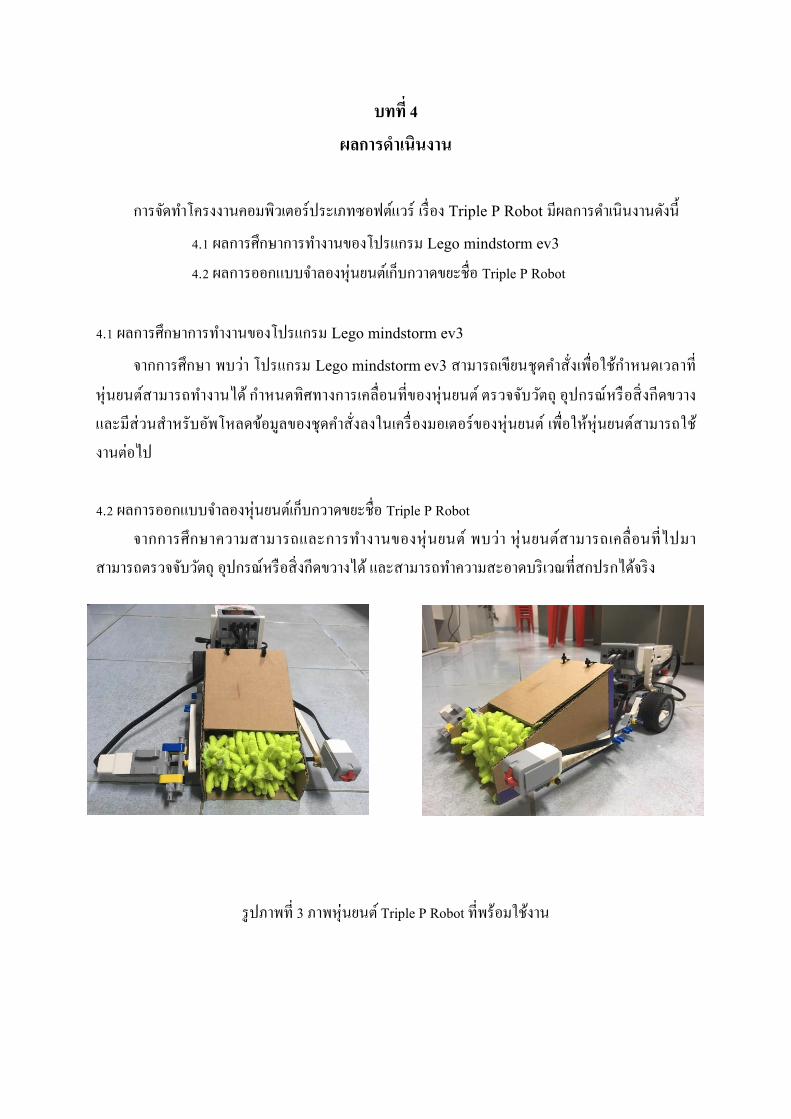
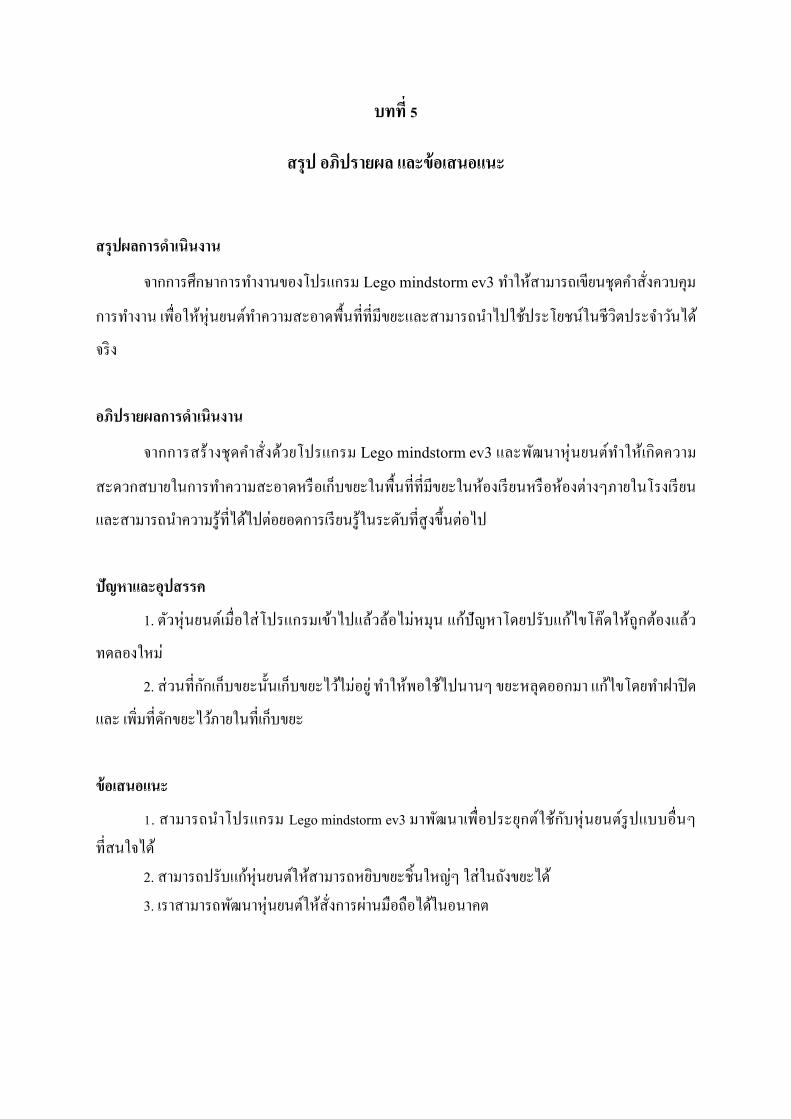
การจดท าโครงงานคอมพวเตอรประเภทซอฟตแวร เรอง Triple P Robot มผลการด าเนนงานดงน
4.1 ผลการศกษาการท างานของโปรแกรม Lego mindstorm ev3 4.2 ผลการออกแบบจ าลองหนยนตเกบกวาดขยะชอ Triple P Robot
4.1 ผลการศกษาการท างานของโปรแกรม Lego mindstorm ev3
จากการศกษา พบวา โปรแกรม Lego mindstorm ev3 สามารถเขยนชดค าสงเพอใชก าหนดเวลาทหนยนตสามารถท างานได ก าหนดทศทางการเคลอนทของหนยนต ตรวจจบวตถ อปกรณหรอสงกดขวาง และมสวนส าหรบอพโหลดขอมลของชดค าสงลงในเครองมอเตอรของหนยนต เพอใหหนยนตสามารถใชงานตอไป
4.2 ผลการออกแบบจ าลองหนยนตเกบกวาดขยะชอ Triple P Robot จากการศกษาความสามารถและการท างานของหนยนต พบวา หนยนตสามารถเคลอนทไปมา สามารถตรวจจบวตถ อปกรณหรอสงกดขวางได และสามารถท าความสะอาดบรเวณทสกปรกไดจรง
รปภาพท 3 ภาพหนยนต Triple P Robot ทพรอมใชงาน
บทท 5
สรป อภปรายผล และขอเสนอแนะ
สรปผลการด าเนนงาน
จากการศกษาการท างานของโปรแกรม Lego mindstorm ev3 ท าใหสามารถเขยนชดค าสงควบคมการท างาน เพอใหหนยนตท าความสะอาดพนททมขยะและสามารถน าไปใชประโยชนในชวตประจ าวนได
จรง
อภปรายผลการด าเนนงาน
จากการสรางชดค าสงดวยโปรแกรม Lego mindstorm ev3 และพฒนาหนยนตท าใหเกดความสะดวกสบายในการท าความสะอาดหรอเกบขยะในพนททมขยะในหองเรยนหรอหองตางๆภายในโรงเรยน
และสามารถน าความรทไดไปตอยอดการเรยนรในระดบทสงขนตอไป
ปญหาและอปสรรค
1. ตวหนยนตเมอใสโปรแกรมเขาไปแลวลอไมหมน แกปญหาโดยปรบแกไขโคดใหถกตองแลว
ทดลองใหม
2. สวนทกกเกบขยะนนเกบขยะไวไมอย ท าใหพอใชไปนานๆ ขยะหลดออกมา แกไขโดยท าฝาปด
และ เพมทดกขยะไวภายในทเกบขยะ
ขอเสนอแนะ
1. สามารถน าโปรแกรม Lego mindstorm ev3 มาพฒนาเพอประยกตใชกบหนยนตรปแบบอนๆ ทสนใจได 2. สามารถปรบแกหนยนตใหสามารถหยบขยะชนใหญๆ ใสในถงขยะได 3. เราสามารถพฒนาหนยนตใหสงการผานมอถอไดในอนาคต
บรรณานกรม
LEGOeducation. (มปป.). คมอฉบบภาษาไทย EV3. USER GUIDE. นนทบร : บรษท แกมมาโก (ประเทศไทย)
จ ากด.
Thaigoodview. ประโยชนของหนยนต[ออนไลน]. เขาถงไดจาก : http://www.thaigoodview.com/node/135523
(สบคนเมอ 4 สงหาคม 2561).
ความหมายของหนยนต[ออนไลน]. เขาถงไดจาก :https://th.wikipedia.org/wiki.
(สบคนเมอ 4 สงหาคม 2561).
พจตรา กรอบมข. ประโยชนของหนยนต[ออนไลน]. เขาถงไดจาก :https://phichitra999.wordpress.com/
(สบคนเมอ 4 สงหาคม 2561).
ประเภทของหนยนต[ออนไลน]. เขาถงไดจาก :https://www.mmthailand.com/
(สบคนเมอ 5 สงหาคม 2561).
ปญญาประดษฐ[ออนไลน]. เขาถงไดจาก :https://th.wikipedia.org/wiki/
(สบคนเมอ 15 สงหาคม 2561).
ภาคผนวก
เครองมอ วสด อปกรณ 1.คอมพวเตอรพรอมเชอมตออนเทอรเนต
2.มอเตอรหนยนต
3. เครอง ev3 brick

4. Touch sensor
5. ชนสวนเพอตอหนยนต
6. สายUSB
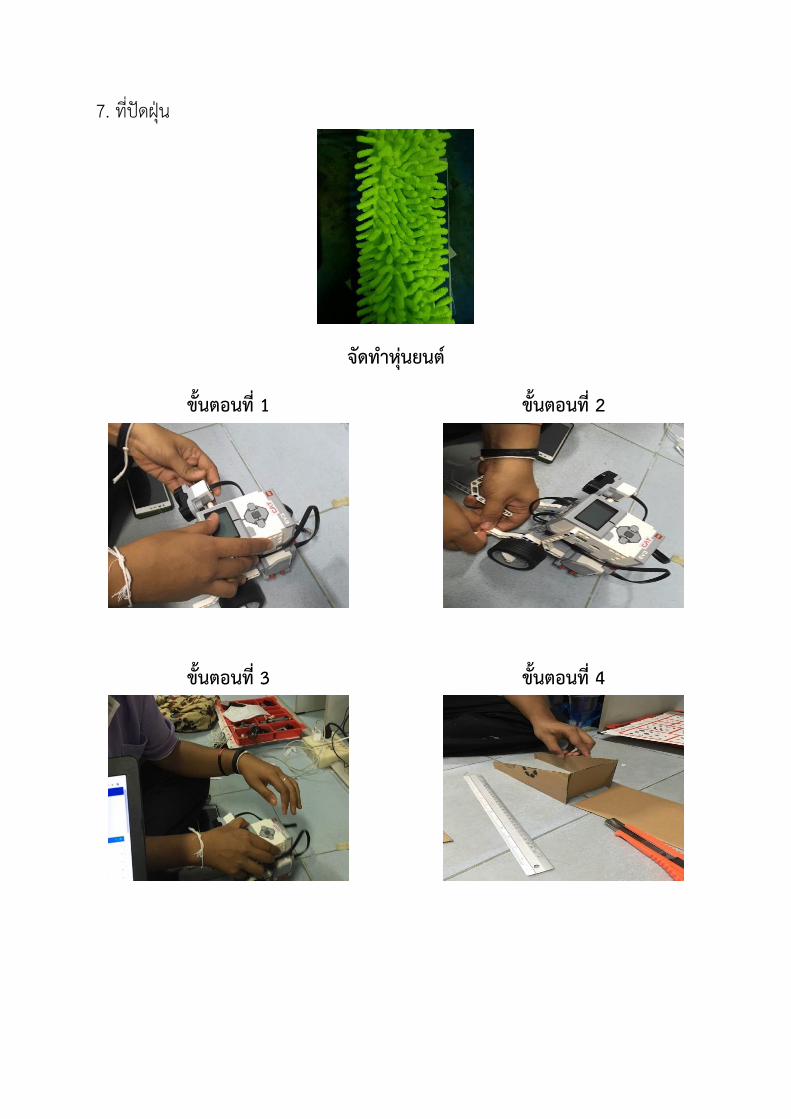
7. ทปดฝน
จดท าหนยนต
ขนตอนท 1 ขนตอนท 2
ขนตอนท 3 ขนตอนท 4
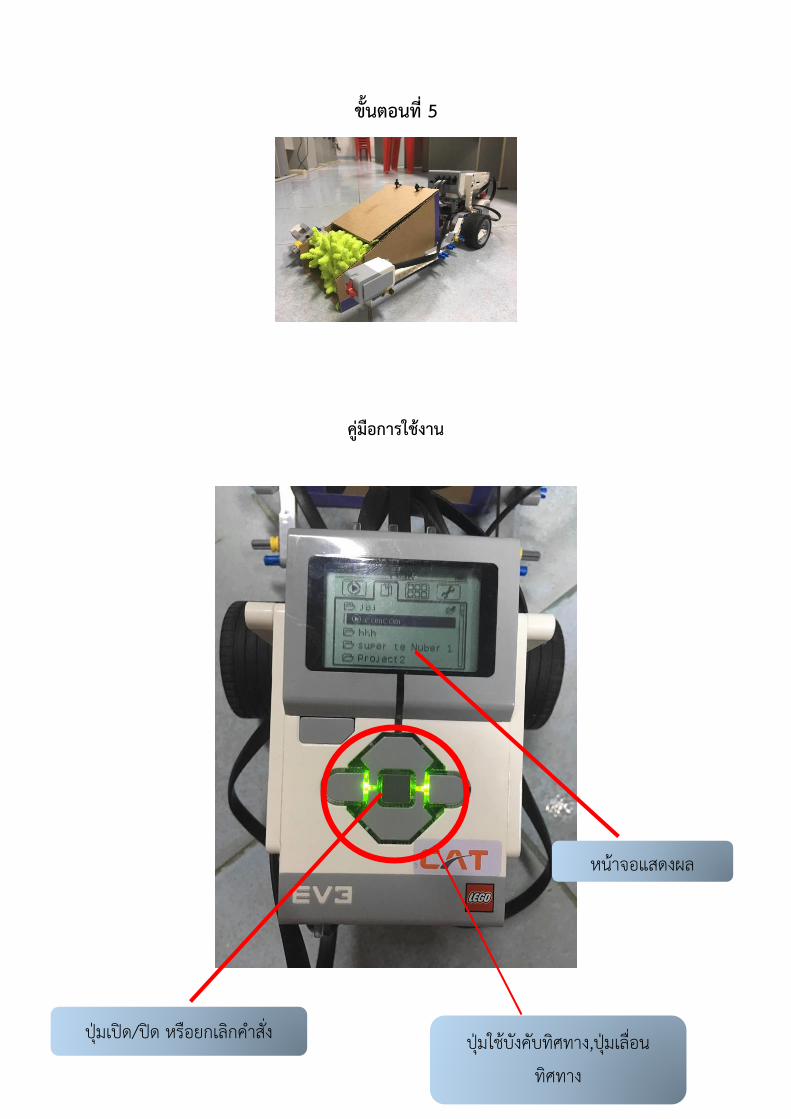
ขนตอนท 5
คมอการใชงาน
ปมเปด/ปด หรอยกเลกค าสง ปมใชบงคบทศทาง,ปมเลอนทศทาง
หนาจอแสดงผล
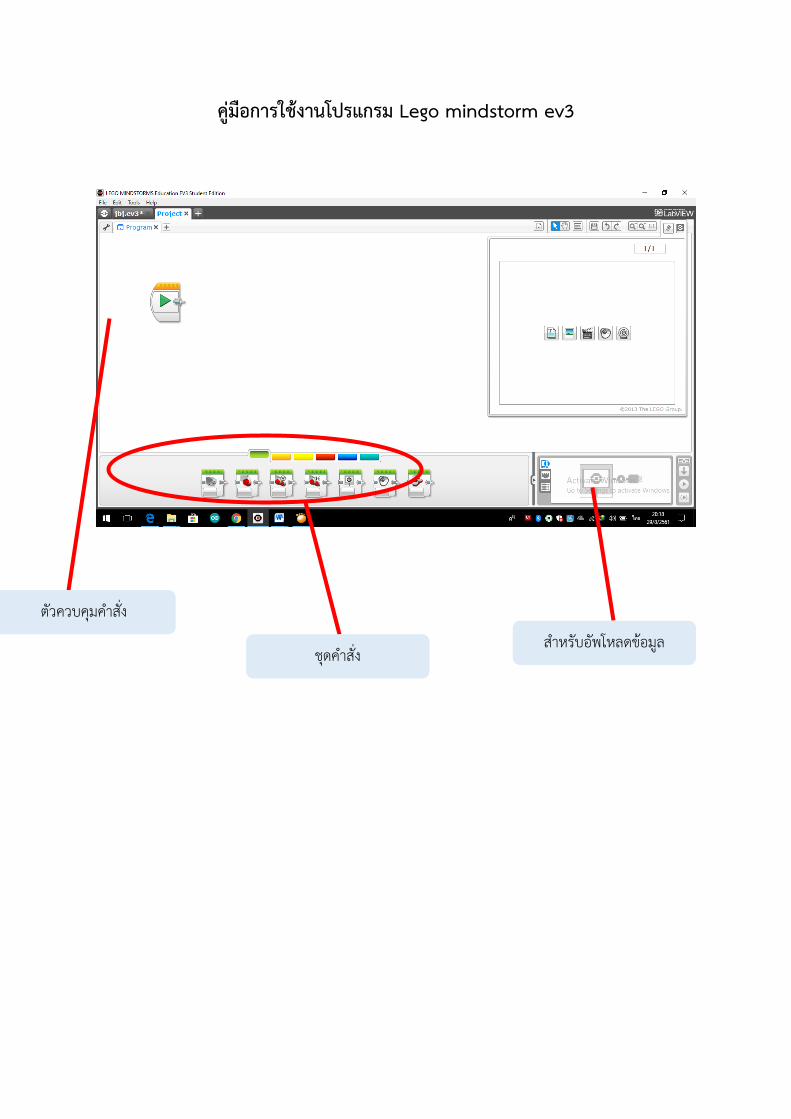
คมอการใชงานโปรแกรม Lego mindstorm ev3
ตวควบคมค าสง
ชดค าสง ส าหรบอพโหลดขอมล