Embed Size (px)
Citation preview

ใบรบรองวทยานพนธ บณฑตวทยาลย มหาวทยาลยเกษตรศาสตร
ปรญญา
สาขา ภาควชา เรอง การควบคมลกตมนาฬกาหวกลบสองแกนดวยวธการควบคมแบบเหมาะสมทสด Balancing of Two-Stage Inverted Pendulum by Optimal Control Method นามผวจย นายฐกด เบญจเลศยานนท
ไดพจารณาเหนชอบโดย
อาจารยทปรกษาวทยานพนธหลก
( )
อาจารยทปรกษาวทยานพนธรวม
( )
หวหนาภาควชา
( )
บณฑตวทยาลย มหาวทยาลยเกษตรศาสตรรบรองแลว
( )
คณบดบณฑตวทยาลย วนท เดอน พ.ศ.
วศวกรรมศาสตรมหาบณฑต (วศวกรรมเครองกล)
วศวกรรมเครองกล วศวกรรมเครองกล
อาจารยวทต ฉตรรตนกลชย, Ph.D.
ผชวยศาสตราจารยทวเดช ศรธนาพพฒน, Ph.D.
รองศาสตราจารยกญจนา ธระกล, D.Agr.
รองศาสตราจารยชวลต กตตชยการ, Ph.D.

วทยานพนธ
เรอง
การควบคมลกตมนาฬกาหวกลบสองแกนดวยวธการควบคมแบบเหมาะสมทสด
Balancing of Two-Stage Inverted Pendulum by Optimal Control Method
โดย
นายฐกด เบญจเลศยานนท
เสนอ
บณฑตวทยาลย มหาวทยาลยเกษตรศาสตร
เพอความสมบรณแหงปรญญาวศวกรรมศาสตรมหาบณฑต (วศวกรรมเครองกล) พ.ศ. 2553

ฐกด เบญจเลศยานนท 2553: การควบคมลกตมนาฬกาหวกลบสองแกนดวยวธการควบคมแบบเหมาะสมทสด ปรญญาวศวกรรมศาสตรมหาบณฑต (วศวกรรมเครองกล) สาขาวศวกรรมเครองกล ภาควชาวศวกรรมเครองกล อาจารยทปรกษาวทยานพนธหลก: อาจารยวทต ฉตรรตนกลชย, Ph.D. 90 หนา
ระบบลกตมหวกลบเปนระบบทประกอบดวย มวล กานลกตม ตวรถ มอเตอรไฟฟาในการควบคมต าแหนงของรถ และอปกรณอนๆ การควบคมลกตมหวกลบใหมเสถยรภาพนนท าไดยาก เนองจากระบบลกตมหวกลบเปนระบบทไมเปนเชงเสน และจ านวนสญญาณปอนเขานอยกวาจ านวนองศาอสระ งานวจยนน าเสนอการออกแบบระบบควบคมลกตมหวกลบสองแกน โดยอาศยตวคมคาก าลงสองเชงเสน การออกแบบจะท าโดยการสรางสมการแบบจ าลองทางคณตศาสตร เพอน าไปใชหาคาอตราขยายทเหมาะสมโดยใชโปรแกรมคอมพวเตอรในการค านวณ และท าการทดสอบอตราขยายทไดโดยการจ าลองระบบดวยโปรแกรมคอมพวเตอร รวมกบการทดสอบระบบจรง ผลการทดลองพบวาประสทธภาพในการควบคมระบบขนอยกบการเลอกตวแปรคาน าหนกทเหมาะสม ซงผลการทดลองสามารถยอมรบไดในประสทธภาพของการออกแบบระบบควบคม โดยสามารถรกษาเสถยรภาพของลกตมหวกลบทงสองไดจรง และการเพมตวอนทกรลใหกบระบบชวยเพมความสามารถในการรกษาต าแหนงของตวรถไดดขน อยางไรกตามการทดสอบระบบจรงพบวามขอจ ากดในดานอปกรณตางๆท าใหระบบไมสามารถทนตอสงรบกวนไดมากนก เนองจากจะท าใหเกนขดจ ากดการท างานของอปกรณดงกลาว
/ / ลายมอชอนสต ลายมอชออาจารยทปรกษาวทยานพนธหลก

Takat Benjalersyarnon 2010: Balancing of Two-Stage Inverted Pendulum by Optimal Control Method. Master of Engineering (Mechanical Engineering), Major Field: Mechanical Engineering, Department of Mechanical Engineering. Thesis Advisor: Mr. Withit Chatlatanagulchai, Ph.D. 90 pages.
Inverted pendulum system is a system that consists of a mass, a rod, a cart, and a direct-current motor, for controlling the position of the cart and the other parts. Balancing the inverted pendulum is a difficult problem because the inverted pendulum has non-linear model, is unstable, and has fewer number of input signals than its degrees of freedom. This research presents controller design of a two-stage inverted pendulum by using the linear quadratic regulator (LQR) technique. To design the controller, a mathematical model of the pendulum is created. The model is used in finding suitable gains via computer programming. Then, the resulting gains are validated by computer simulation and real hardware implementation. The results show that the performance of the control system depends on the selection of weighted variables. The experimental results confirm that the performance of the control system is acceptable. The two-stage inverted pendulum can actually be balanced. Adding an integral to the system improves the ability in controlling the cart position. However, there are some limitations on the actual experimental equipments. As a result, the system cannot tolerate much disturbances because they exceed the limitation of the equipments.
/ / Student’s signature Thesis Advisor’s signature

กตตกรรมประกาศ ขาพเจาขอขอบพระคณ อ.ดร. วทต ฉตรรตนกลชย อาจารยทปรกษาวทยานพนธหลก ทไดใหค าแนะน าและความชวยเหลอในการท าวจยนใหสามารถส าเรจไปไดดวยด ขอขอบพระคณ ผศ.ดร.ทวเดช ศรธนาพพฒน อาจารยทปรกษาวทยานพนธรวม ส าหรบค าแนะน าตางๆเพอน าไปปรบปรงวทยานพนธใหดยงขน ขอขอบพระคณ ผศ.ดร.วชย ศวะโกศษฐ ดร.กฤษฎา วรรณทอง ส าหรบค าแนะน าตางๆเพมเตมเพอการปรบปรงวทยานพนธใหดยงขน ขอขอบพระคณคณาจารยภาควชาวศวกรรมเครองกล มหาวทยาลยเกษตรศาสตร ตลอดจนอาจารยและคณครทกทานทไดสงสอน อมรม และถายทอดความรจนไดเปนผลงานชนน ขอขอบคณสถาบนคนควาและพฒนาเทคโนโลยการผลตทางอตสาหกรรมทเออเฟอสถานทในการท างานวจย ขอขอบคณเพอนๆ พๆ นองๆ ส าหรบก าลงใจและค าแนะน าตาง และขอขอบพระคณคณพอ คณแม ทเปนก าลงใจและสนนสนนเปน อยางดเสมอมา
ฐกด เบญจเลศยานนท เมษายน 2553

(1)
สารบญ
หนา สารบญ (1) สารบญตาราง (2) สารบญภาพ (3) ค าอธบายสญลกษณและค ายอ (7) ค าน า 1 วตถประสงค 3 การตรวจเอกสาร 4 อปกรณและวธการ 14 อปกรณ 14 วธการ 20 ผลและวจารณ 59 ผล 59 วจารณ 77 สรปและขอเสนอแนะ 78 สรป 78 ขอเสนอแนะ 79 เอกสารและสงอางอง 80 ภาคผนวก 82 ประวตการศกษาและการท างาน 90

(2)
สารบญตาราง
ตารางท หนา
1 พารามเตอรของระบบ 22 2 คาพารามเตอรทไดจากการแกวงอยางอสระของกานลกตมกานทหนง 25 3 คาพารามเตอรทไดจากการแกวงอยางอสระของกานลกตมกานทสอง 27 4 คาน าหนกและอตราขยายทใชในการออกแบบ 38 5 เปรยบเทยบตวแปรระหวางตวสงเกตอนดบเตมและตวสงเกตลดอนดบ 48 6 คาน าหนกและอตราขยายทใชในการทดสอบการควบคม 65

(3)
สารบญภาพ
ภาพท หนา
1 ระบบลกตมหวกลบอยางงาย (simple inverted pendulum) 1 2 3D inverted pendulum 5 3 แบบจ าลองการยนของหนยนต PTIP 5 4 PillCam® capsule robot ทมการใชจรงในทางการแพทยในปจจบน 6 5 ระบบลกตมหวกลบถกใชในการจ าลองการควบคมทศทางของจรวดหรอ
ขปนาวธ 7 6 Segway 8 7 U3-X 8 8 เสนทางเดนของราก (root locus) ของลกตมหวกลบ ของระบบวงเปด (open-
loop) 9 9 เสนทางเดนของราก (root locus) ของระบบวงปด (closed-loop) โดยใช PID 10
10 บลอกไดอะแกรมการควบคมระบบลกตมหวกลบดวยตวควบคม PID 2 ตว 10 11 บลอกไดอะแกรมของระบบปอนกลบ 12 12 ลกตมชนท 1 14 13 ลกตมชนท 2 14 14 monocarrier ทถกน ามาใชเปนอปกรณเปลยนการหมนเปนการเคลอนทของรถ 15 15 รายละเอยดของอปกรณทใชงาน (MCM06040H20K00) 15 16 rotary encoder 16 17 มอเตอรกระแสตรง 16 18 NI DAQ PCI-6221 17 19 วงจรขยายสญญาณ Sabertooth 2X20 18 20 DC power supply 18 21 ชดการทดลองระบบลกตมหวกลบสองแกนภายในหองปฏบตการ 19 22 ระบบลกตมหวกลบสองแกน 21 23 free body diagram ของกานลกตมทหนง 23 24 การทดลองทดสอบหาคาพารามเตอร 1 1,c J 24 25 ผลตอบสนองจากปลอยกานลกตมกานท 1 อยางอสระ ทจดเรมตน 15 องศา 24

(4)
สารบญภาพ (ตอ)
ภาพท หนา
26 free body diagram ของกานลกตมทสอง 27 27 การทดลองทดสอบหาคาพารามเตอร 26 28 ผลตอบสนองจากปลอยกานลกตมกานท2 อยางอสระ ทจดเรมตน 15 องศา 28 29 free body diagram ของตวรถ 29 30 การตออปกรณการทดลองหาคาพารามเตอรทจ าเปนของตวขยายสญญาณ
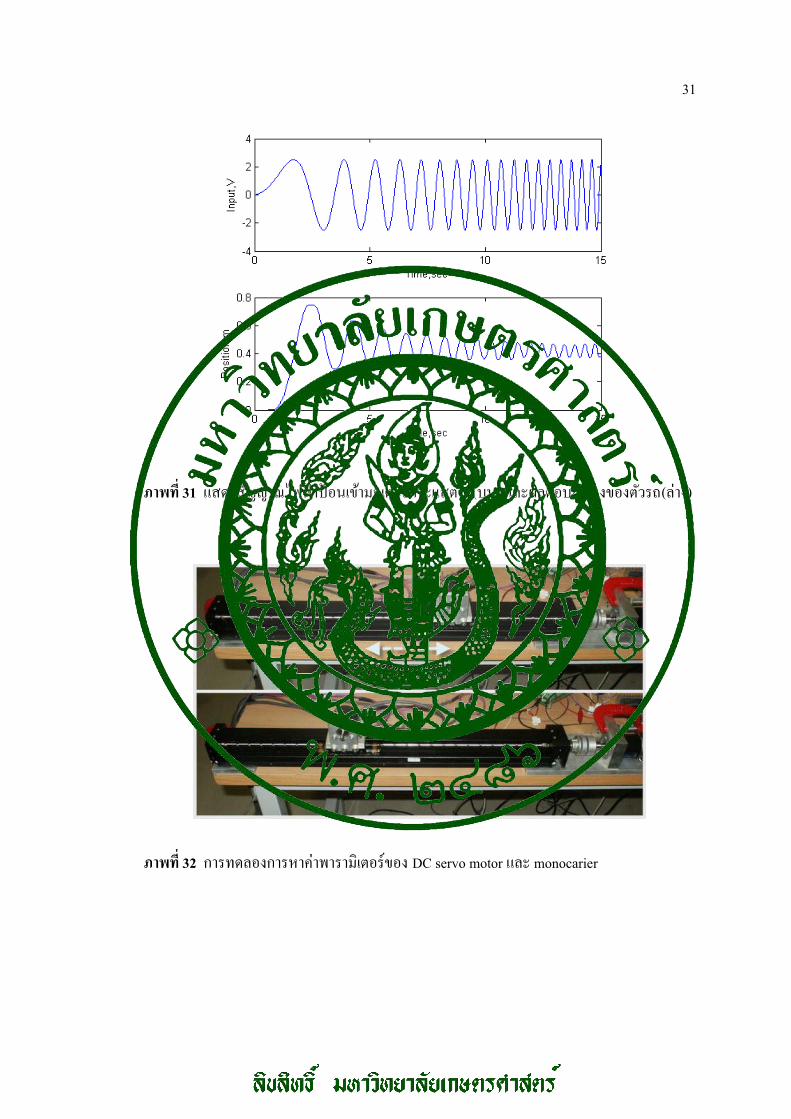
มอเตอร และ monocarrier (open-loop) 31 31 แสดงสญญาณไฟฟาปอนเขามอเตอรกระแสตรง(บน) และผลตอบสนองของตว
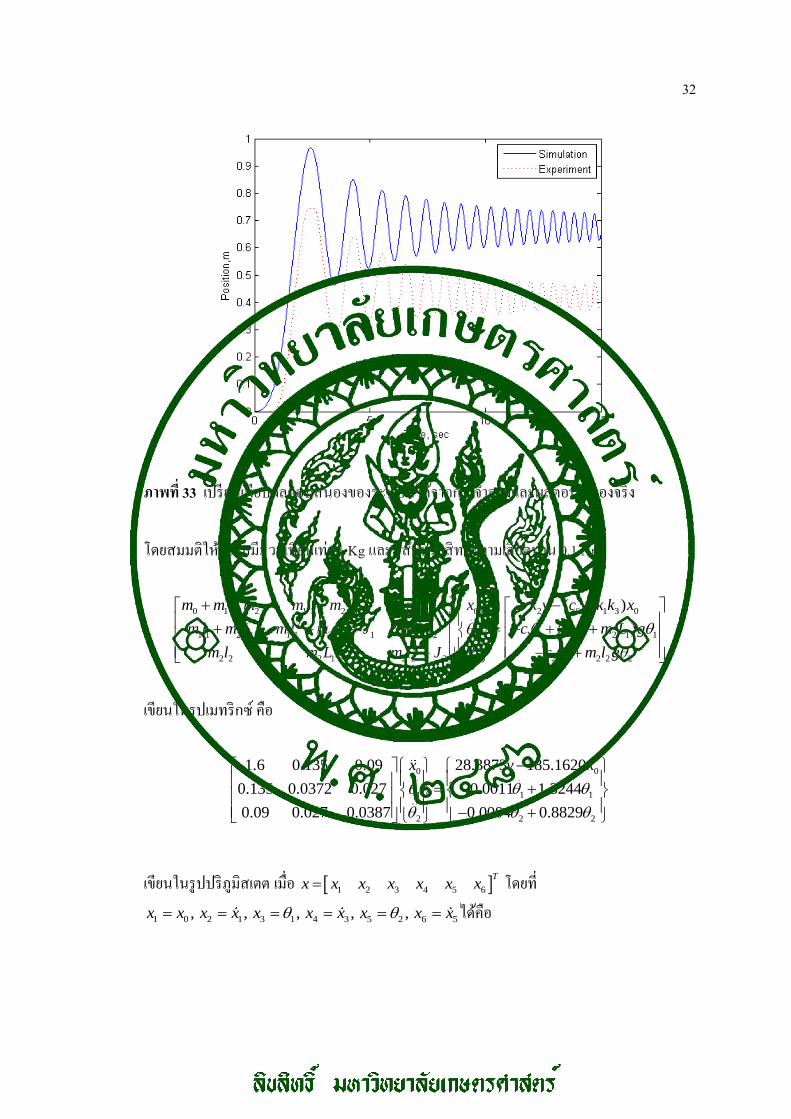
รถ(ลาง) 30 32 การทดลองการหาคาพารามเตอรของ DC servo motor และ monocarier 31 33 เปรยบเทยบผลตอบสนองของระบบทไดจากการจ าลองและผลตอบสนองจรง 32 34 แผนภาพแสดงการควบคมปอนกลบรกษาเสถยรภาพ (stabilization feedback
control) 35 35 ผลการจ าลองระบบดวย MATLAB ทคาน าหนก Q, R ตางๆ ตามตารางท 1 39 36 บลอกไดอะแกรมของระบบทมตวสงเกตสถานะอนดบเตม 40 37 การจ าลองการรกษาเสถยรภาพของระบบควบคมก าลงสองเชงเสนทมตวสงเกต
อนดบเตม 46 38 บลอกไดอะแกรมของระบบทมตวสงเกตสถานะลดอนดบ 50 39 ระบบปอนกลบทมตวสงเกตสถานะลดอนดบ 54 40 การจ าลองการรกษาเสถยรภาพของระบบควบคมก าลงสองเชงเสนทมตวสงเกต
ลดอนดบ 58 41 บลอกไดอะแกรมของระบบทมตวสงเกตสถานะลดอนดบและมตวอนทกรล 54 42 การจ าลองการรกษาเสถยรภาพของระบบควบคมก าลงสองเชงเสนทมตวสงเกต
ลดอนดบทมตวอนทกรล 56 43 ขอบเขตการท างานของอปกรณขยายสญญาณ (amplifier) 61 44 การรบกวนลกตมทต าแหนงตางๆ 62
(5)
สารบญภาพ (ตอ)
ภาพท หนา
45 ผลตอบสนองของระบบเมอไมมสญญาณควบคม โดยมคาเรมตน x5 = 0.1 เรเดยน 63
46 ผลการจ าลองการรกษาเสถยรภาพของระบบควบคมโดยใชตวควบคม LQR คาต าแหนง เรมตนท x3 = 0.1 เรเดยน) 61
47 ผลการจ าลองการรกษาเสถยรภาพของระบบควบคมโดยใชตวควบคม LQR คาต าแหนง เรมตนท x5 = 0.1 เรเดยน) 62
48 ผลการจ าลองการรกษาเสถยรภาพของระบบควบคมโดยใชตวควบคม LQR คาต าแหนง เรมตนท x3 = 0.1 เรเดยน, x5 = -0.1 เรเดยน) 63
49 ระบบเมอไมมการควบคม 64 50 ผลตอบสนองตอคาเรมตนเมอระบบผลการจ าลองการรกษาเสถยรภาพของระบบ
ควบคม โดยใชตวควบคม LQR คาน าหนก Q1 และ R1 66 51 ผลตอบสนองตอคาเรมตนเมอระบบผลการจ าลองการรกษาเสถยรภาพของระบบ
ควบคม โดยใชตวควบคม LQR คาน าหนก Q1 และ R1 และมตวอนทกรล K1 = 0.5 67
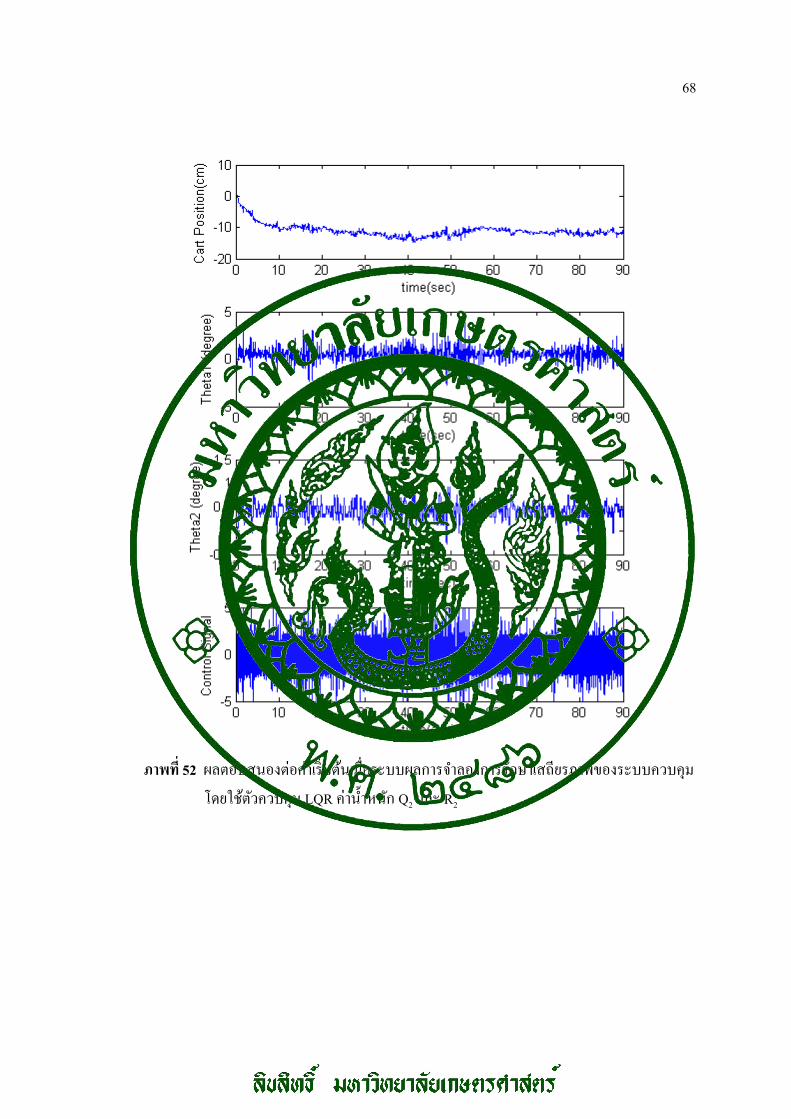
52 ผลตอบสนองตอคาเรมตนเมอระบบผลการจ าลองการรกษาเสถยรภาพของระบบควบคม โดยใชตวควบคม LQR คาน าหนก Q2 และ R2 68
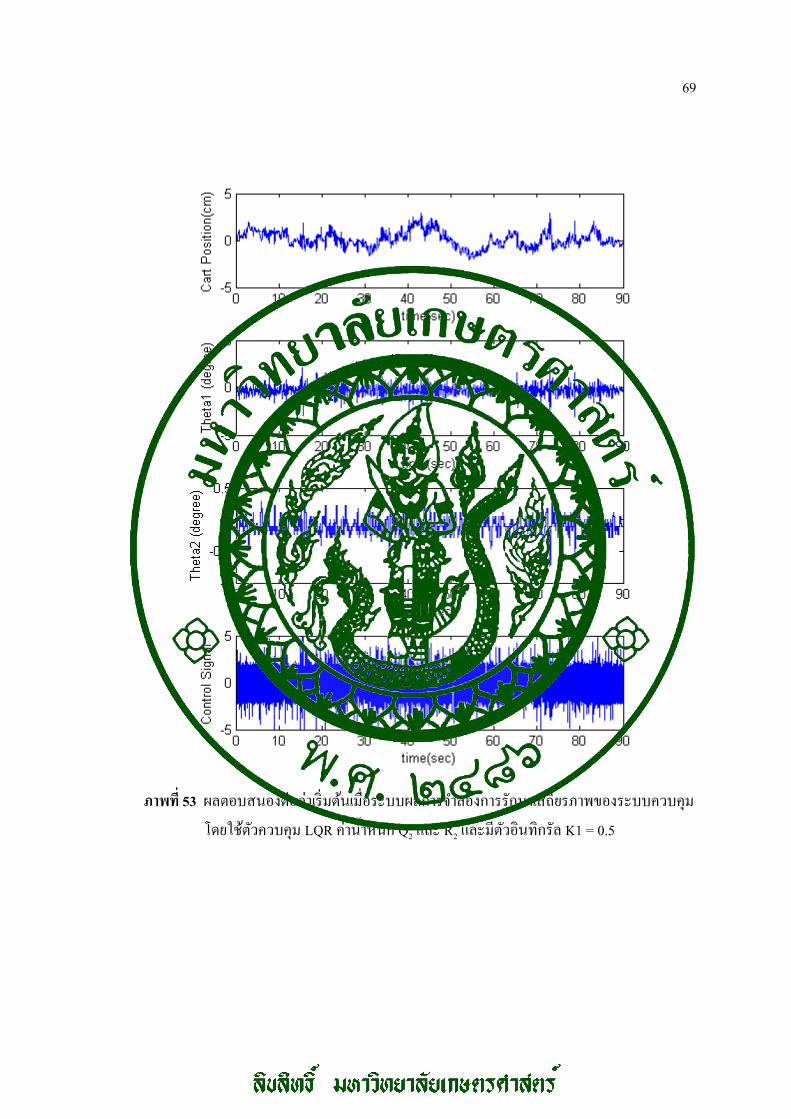
53 ผลตอบสนองตอคาเรมตนเมอระบบผลการจ าลองการรกษาเสถยรภาพของระบบควบคม โดยใชตวควบคม LQR คาน าหนก Q2 และ R2 และมตวอนทกรล K1 = 0.5 69
54 การรบกวนระบบทวนาทท 30 (theta1) และ วนาทท 40 (theta2) เมอระบบควบคมโดยใช ตวควบคม LQR คาน าหนก Q2 และ R2 และมตวอนทกรล K1 = 0.5 70
55 ผลตอบสนองตอคาเรมตนเมอระบบผลการจ าลองการรกษาเสถยรภาพของระบบควบคม โดยใชตวควบคม LQR คาน าหนก Q3 และ R3 71
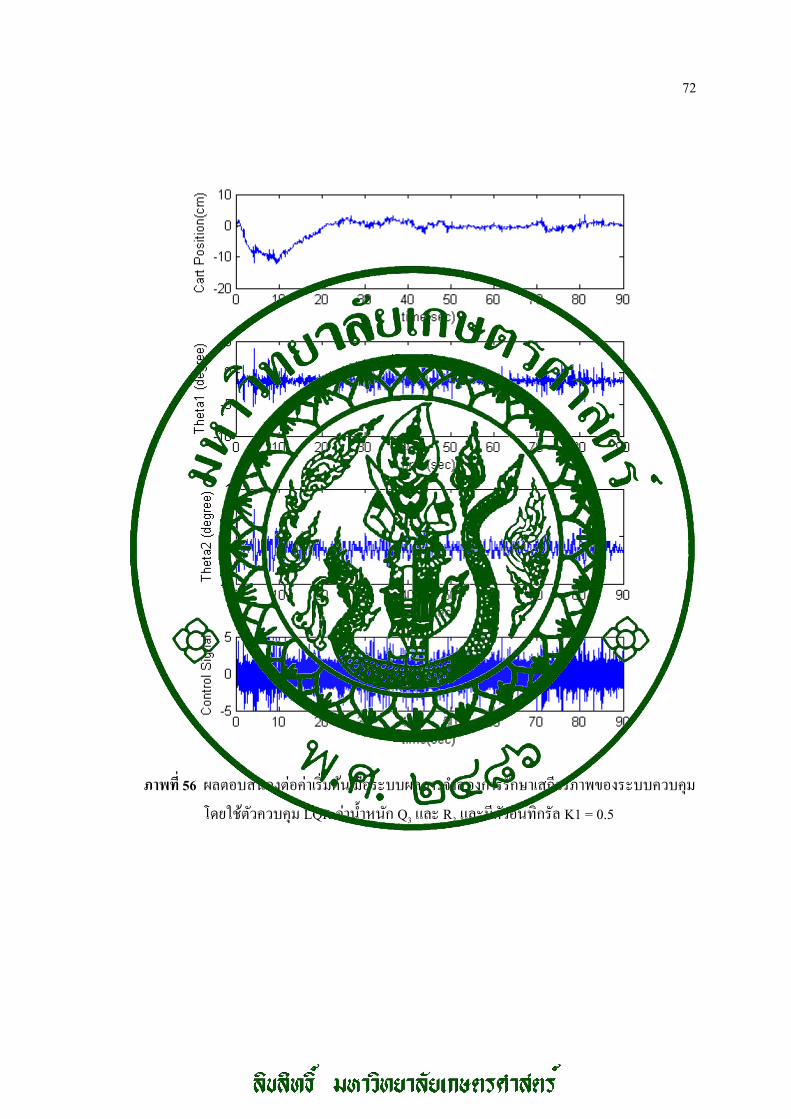
56 ผลตอบสนองตอคาเรมตนเมอระบบผลการจ าลองการรกษาเสถยรภาพของระบบควบคม โดยใชตวควบคม LQR คาน าหนก Q3 และ R3 และมตวอนทกรล K1 = 0.5 72
(6)
สารบญภาพ (ตอ)
ภาพท หนา
57 การรบกวนระบบทวนาทท 30 (theta1) และ วนาทท 40 (theta2) เมอระบบควบคมโดยใช ตวควบคม LQR คาน าหนก Q3 และ R3 และมตวอนทกรล K1 = 0.5 73
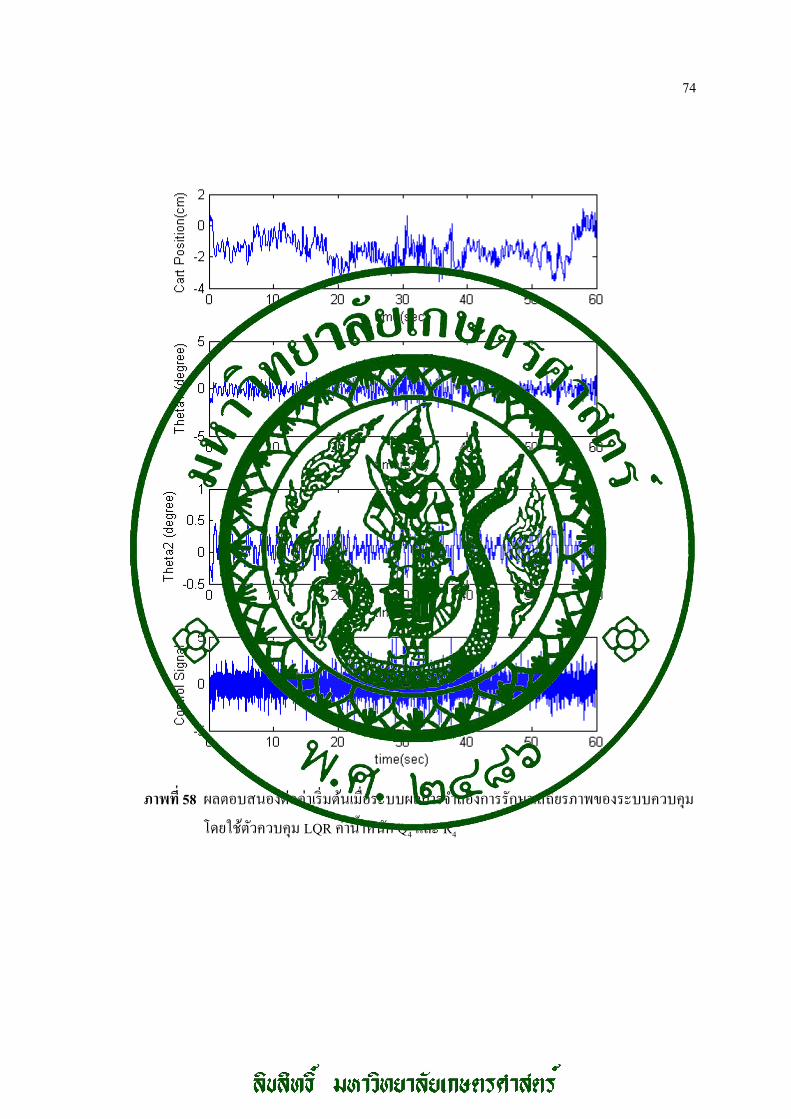
58 ผลตอบสนองตอคาเรมตนเมอระบบผลการจ าลองการรกษาเสถยรภาพของระบบควบคม โดยใชตวควบคม LQR คาน าหนก Q4 และ R 74
59 ผลตอบสนองตอคาเรมตนเมอระบบผลการจ าลองการรกษาเสถยรภาพของระบบควบคม โดยใชตวควบคม LQR คาน าหนก Q4 และ R4 และมตวอนทกรล K1 = 0.5 75
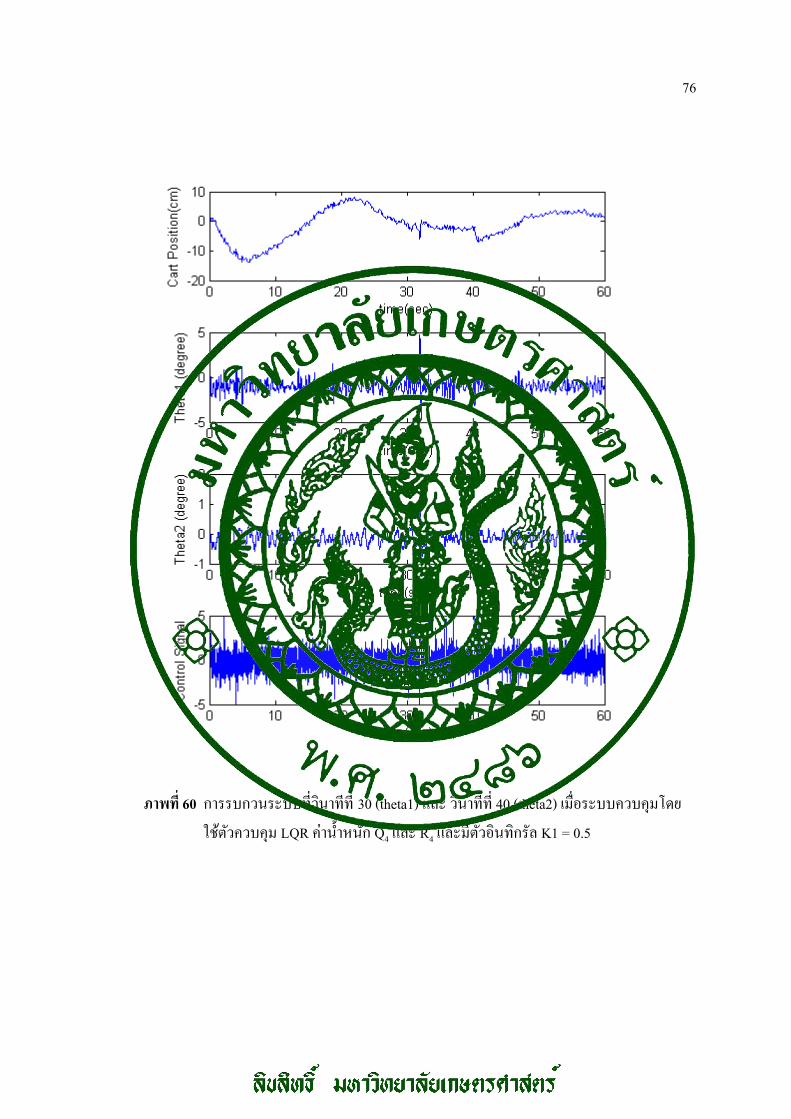
60 การรบกวนระบบทวนาทท 30 (theta1) และ วนาทท 40 (theta2) เมอระบบควบคมโดยใชตวควบคม LQR คาน าหนก Q4 และ R4 และมตวอนทกรล K1 = 0.5 76
ภาพผนวกท
1 free body diagram ของระบบลกตมหวกลบสองแกน 83

(7)
ค าอธบายสญลกษณและค ายอ
c = คาคงทความเสยดทาน DAQ = data acquisition FBD = free body diagram LTI = linear time invariant LQR = linear quadratic regulator MIMO = multi input multi output PID = proportional integral derivative SISO = single input single output
1
การควบคมลกตมนาฬกาหวกลบสองแกนดวยวธการควบคมแบบเหมาะสมทสด
Balancing of Two-Stage Inverted Pendulum by Optimal Control Method
ค าน า ระบบลกตมหวกลบ (inverted pendulum) เปนระบบทส าคญในการศกษาทางดานวศวกรรมควบคม และเปนตวอยางทดในการศกษาทฤษฎระบบควบคมสมยใหมทมความซบซอนและยากยงขน เนองจากการควบคมระบบลกตมหวกลบจดเปนระบบทแสดงใหเหนถงการควบคมระบบทไมมเสถยรภาพในตวเอง ใหสามารถท าใหมเสถยรภาพได นอกจากนระบบยงตองการการควบคมเอาทพททมากกวาหนงตว ซงเปนไปไดยากทจะอาศยทฤษฎการควบคมดงเดมแบบทวไป อยางเชน P, PI หรอ PID ได ระบบลกตมหวกลบจดเปนตวอยางทดในการศกษาลกษณะการเคลอนทและการควบคม ของระบบอนๆ เชน ระบบขบเคลอนของจรวด หรอดาวเทยม ระบบลงจอดอตโนมตในอากาศยาน การควบคมการทรงตวของอากาศยานในสภาพการไหลของอากาศแบบปนปวน การทรงตวของเรอหรอระบบขนาดเลกอยางเชนหนยนตแคปซลเพอใชในทางการแพทย เปนตน สงส าคญอยางหนงทระบบลกตมหวกลบถกน ามาใชในการจ าลองระบบตางๆ เนองจากลกตมหวกลบเปนระบบทมความไมเปนเชงเสนสง ท าใหยากทจะใชเทคนคการควบคมเชงเสนกบ ระบบทไมเปนเชงเสนได จงจ าเปนตองท าใหเปนเชงเสน (linearization) กอนทจะใชเทคนคการควบคมแบบเชงเสนได ในทนไดท าการน าทฤษฎการควบคมเหมาะสมทสด (optimal control theory) มาใชในการควบคม โดยน าการควบคมแบบก าลงสองเชงเสน (LQR) มาใชในการออกแบบเนองจากมความเหมาะสมตอการใชงาน และเนองจากการควบคม LQR เปนทฤษฎการควบคมเชงเสน ทตองอาศยสมการทางคณตศาสตร จงนบเปนความทาทายอยางหนงในการหาคาพารามเตอรตางๆ เพอใหสมการทางคณตศาสตรทไดมความแมนย าเพอใหสามารถควบคมระบบได ในงานวจยนจะท าการศกษาการควบคมระบบลกตมหวกลบสองแกน ซงเปนระบบทมความซบซอนมากขนจากระบบลกตมหวกลบอยางงาย เนองจากเปนระบบทมจ านวนตวแปรทจ าเปนตองควบคมมากขน ซงตองอาศยตวควบคมทเหมาะสม รวมถงอปกรณตางๆทสามารถรองรบขอจ ากดทเกดขนได

2
สบเนองจากการพฒนาทางดานเทคโนโลย มการพฒนาทงทางดานฮารดแวรและซอฟทแวร ท าใหในปจจบนคอมพวเตอรเขามบทบาทอยางมากในงานทางดานการควบคม งานวจยนจงไดอาศยซอฟทแวรตางๆทชวยในการออกแบบ จ าลอง การควบคม เชน Mathworks MATLAB, National Instruments LabVIEW เปนตน ซงจะชวยอ านวยความสะดวกในการทดลองและแสดงผลการทดลองมากขน

3
วตถประสงค วตถประสงคในการท างานวจยน เพอศกษาพฤตกรรมของลกตมหวกลบ และออกแบบระบบควบคมลกตมหวกลบชนดสองแกน โดยสรางสมการแบบจ าลองทางคณตศาสตรของระบบลกตมหวกลบสองแกน ออกแบบตวควบคมดวยวธก าลงสองเชงเสน ศกษาผลจากการปรบปรงระบบดวยการเพมตวตวอนทกรล สรางชดทดลองระบบลกตมหวกลบสองแกน และน าตวควบคมทไดจากการออกแบบไปท าการควบคมกบชดทดลองระบบลกตมหวกลบสองแกน

4
การตรวจเอกสาร ระบบลกตมหวกลบ (inverted pendulum) จดเปนระบบหนงทมความทาทายในการศกษาการควบคมระบบทางดานวศวกรรมควบคม เนองจากความเปนระบบทไมมเสถยรภาพ จงตองอาศยตวควบคมทเหมาะสมในการควบคม
m
x ภาพท 1 ระบบลกตมหวกลบอยางงาย (simple inverted pendulum) ภาพท 1 แสดงระบบลกตมหวกลบอยางงาย เปนระบบทถอเปนตวอยางของระบบลกตมหวกลบ ซงถกใชเปนตวอยางการเรยนการสอนและตวอยางในหนงสอวชาการควบคมอยางกวางขวาง เนองจากเปนตวอยางของระบบทแสดงใหเหนถงระบบทมความไมมเสถยรภาพ และไมเปนเชงเสนไดเปนอยางด จากภาพลกตมหวกลบอยางงายประกอบดวยสวนส าคญคอ ตวรถ (cart) หรอบางครงจะถกเรยกวา ฐานเคลอนท (moving base) เชอมตอกบ กานลกตม (rod) ทสามารถหมนไดโดยอสระ และมมวล (mass) ทปลายของกานลกตม ลกษณะคลายคลงกบการเลยงไมในแนวดง (broom balancing) โดยพยายามใหแกนไมตงตรง โดยใหมอและแกนไมเคลอนทนอยทสด ระบบแขนกลหนยนตทมจดศนยกลางแรงดนต ากวาจดศนยกลางมวล ท าใหเปนระบบไมมเสถยรภาพ เชนในการควบคมการทรงตวหรอการเดนของหนยนตสองขา ซงเมอเราเขาใจในลกษณะทางพลศาสตรและสามารถควบคมไดมประสทธภาพมากยงขน กจะท าใหเราสามารถควบคมลกษณะการเคลอนไหวทใกลเคยงมนษยมากยงขนตามไปดวย โดยแนวโนมในอนาคตจ าเปนทจะตองสามารถควบคมระบบหลายองศาอสระมากยงขน

5
Kajita et al. (2001) ไดท าการวเคราะหและจ าลองการเคลอนทของหนยนตสองขา ชนด 12 องศาอสระ ในพนท 3 มต โดยใชแบบจ าลองลกตมหวกลบ 3 มต (three-dimensional inverted pendulum model)
ภาพท 2 3D inverted pendulum ชต และคณะ (2545) ไดเสนอการวเคราะหโครงสรางของหนยนตสองขา (humanoid robot) โดยผวจยไดท าการวเคราะหลกษณะทาทางการเดนในแตละชวงของหนยนตสองขา และวเคราะหเสถยรภาพในแตละชวงของการกาวขา และไดท าการสรางแบบจ าลองของการทรงตวบนหนงขาบนระนาบ PTIP (a planar two degree of freedom inverted pendulum) ในการจ าลองและการทดลองพบวาสามารถรกษาเสถยรภาพและทนตอสงรบกวนไดด
ภาพท 3 แบบจ าลองการยนของหนยนต PTIP

6
Wane et al. (2007) ไดท าการศกษาการเคลอนทของ capsule robot ภายในระบบทางเดนอาหารซงเปนเครองมออยางหนงทมการใชงานในทางการแพทย โดย capsule robot จะอาศยการเปลยนแปลงของโมเมนตมภายในตว capsule เพอท าให capsule สามารถเคลอนทไปเกบภาพถายภายในเสนทางเดนอาหาร ซงท าใหแพทยสามารถวนจฉยโรคไดงายมากขน
ภาพท 4 PillCam® capsule robot ทมการใชจรงในทางการแพทยในปจจบน ระบบน าทางของอากาศยานภายใตสภาวะการไหลของอากาศแบบปนปวน กเปนอกระบบหนงทมการน ามาจ าลองระบบดวยลกตมหวกลบ เชนการเคลอนทของจรวดหรอขปนาวธขณะปลอยจากแทนยงทตองท าการควบคมเครองยนตหลายเครองใหสามารถรกษาทศทางได

7
ภาพท 5 ระบบลกตมหวกลบถกใชในการจ าลองการควบคมทศทางของจรวดหรอขปนาวธ การพฒนาการควบคมลกตมหวกลบยงน าไปสการน าเสนอผลตภณฑใหมๆใหกบผบรโภคมากยงขนดงเชน ยานพาหนะเอนกประสงคสองลอ ซงไดม Segway เขามาท าตลาดเชงพาณชยเปนรายตนๆ และมหลายภาคสวนเรมมาสนใจในผลตภณฑประเภทนมากขน ซงในปจจบนไดกาวหนาไปมากยงขนดงทเหนไดจากการเปดตวยานพาหนะลอเดยว (Unicycle) U3-X ในป 2552 โดย Honda R&D Center ประเทศญปน โดยการออกแบบลอดวยระบบ Honda Omni Traction (HOT) ท าใหยานพาหนะสามารถทรงตวไดในทกทศทาง (Honda Motor Co., Ltd., 2009)

8
ภาพท 6 Segway
ภาพท 7 U3-X

9
งานวจยในอดต Sultan (2003) ไดท าการศกษาระบบลกตมหวกลบอยางงาย โดยการศกษาไดท าการสรางสมการแบบจ าลองทางคณคศาสตร ท าการวเคราะหผลตอบสนองของระบบดวยโปรแกรม Matlab และ Simulink โดยการแสดงเสนทางเดนของรากแสดงใหเหนวาระบบทยงไมท าการควบคม จะประกอบดวยโพลบน RHP ซงเปนท าใหระบบไมมเสถยรภาพ หลงจากทไดท าการชดเชยโดยการเพมตวควบคม PID สามารถท าใหลกตมสามารถรกษาเสถยรภาพได
ภาพท 8 เสนทางเดนของราก (root locus) ของลกตมหวกลบ ของระบบวงเปด (open-loop) อยางไรกตามการควบคมระบบดวยตวควบคม PID สามารถรกษาเสถยรภาพของลกตมไวทต าแหนงสมดลบนไดกจรง แตกไมสามารถทจะรกษาต าแหนงของตวรถได เนองจาก PID เหมาะสมกบระบบทเปน SISO ไมสามารถควบคมระบบทตองการหลายเอาทพทไดงาย ท าให PID ไมสามารถควบคมต าแหนงตวรถและมมของลกตมไดในเวลาเดยวกน

10
ภาพท 9 เสนทางเดนของราก (root locus) ของระบบวงปด (closed-loop) โดยใช PID Armad (2005) ไดปรบปรงตวควบคม PID โดยไดใช PID มากกวาหนงตวในการควบคมระบบลกตมหวกลบอยางงายตามภาพท 10 อยางไรกตามการใช PID หลายตวกท าใหเกดความยงยากในการปรบคา โดยเฉพาะในกรณทระบบซบซอนมากยงขน
PID
CONTROLLER
(CART’S POSITION)
PLANT
zero
PID
CONTROLLER 1
(PENDULUM’S ANGLE)
+
r(s)
x(s)
Ø(s)
+
+
-
-
ภาพท 10 บลอกไดอะแกรมการควบคมระบบลกตมหวกลบดวยตวควบคม PID 2 ตว

11
ทฤษฎทเกยวของ ในการออกแบบระบบควบคมลกตมหวกลบจ าเปนทจะตองมความรความเขาใจในหลายแขนง ทส าคญไดแกหลกการทางดานกลศาสตร และทางดานการควบคม การสรางสมการแบบจ าลองทางคณตศาตรเพอจ าลองระบบโดยทวไป จะน ากฎของนวตนมาใชซงเปนวธทสามารถท าความเขาใจไดงาย อยางไรกตามกฎของนวตนไมเหมาะทจะใชส าหรบระบบทมหลายๆตวแปรดงเชนระบบลกตมหวกลบสองแกน ในทนจงน าวธการสรางสมการการเคลอนทโดยใช สมการของลากรางจ ซงสมการทไดจะมความซบซอนนอยกวาการใชกฎของนวตน ซงรายละเอยดการค านวณจะไดกลาวไวในภาคผนวกท ก ในงานวจยนจะกลาวถงการออกแบบระบบควบคมเบองตนอยางคราวๆ ซงรายละเอยดสามารถศกษาเพมเตมไดจากหนงสอเกยวกบระบบควบคมทวไปทงแบบภาษาไทยและภาษาตางประเทศ การออกแบบระบบควบคมถกแบงออกเปนสองประเภท ไดแกแบบดงเดม บนโดเมนความถ และแบบยคใหม บนโดเมนเวลา ขอเสยเปรยบของแบบดงเดมกคอ สามารถออกแบบไดดส าหรบระบบ SISO และ LTI การออกแบบระบบ MIMO จะท าใหสนเปลองเวลาและซบซอน ซงการออกแบบยคใหม จะอาศยตวแปรสถานะ โดยทอนพนธอนดบสงๆสามารถถกเขยนใหอยในรปของอนพนธอนดบหนง ท าใหสามารถแกไขปญหานได 1. พนฐานระบบควบคม ระบบควบคมปอนกลบ (feedback control) หรอระบบควบคมวงปด (closed-loop control) แสดงไดดงบลอกไดอะแกรมดงภาพท 11 โดยประกอบดวยสวนส าคญคอ พลานท (plant) หรอระบบทเราตองการควบคม (ซงในทนกคอระบบลกตมหวกลบ), ตวควบคม (controller) คอ ตวควบคมทออกแบบในการควบคมระบบ เชน P, PI, PID เปนตน และอปกรณวดคา (measurement) หรอตวตรวจร (sensor) ในการวดคาตางๆของระบบ เพอน าไปค านวณในการสรางสญญาณควบคม โดยมเปาหมายของการออกแบบ เชน
- เปนระบบทมเสถยรภาพ - แนววถลเขาสสถานะเปาหมายไดรวดเรว

12
- ใชพลงงานในการควบคมนอย - อนๆ
CONTROLLER PLANT
MEASUREMENTS
INPUT OUTPUT
ภาพท 11 บลอกไดอะแกรมของระบบปอนกลบ 2. ระบบควบคมปรภมสถานะ สมการปรภมสถานะเขยนไดในรปของเซตของสมการอนพนธอนดบหนงทม n ตวแปรสถานะ ส าหรบระบบ LTI
x Ax Bu
y Cx Du
เมอ x = เวกเตอรสถานะ y = เวกเตอรเอาทพท u = เวกเตอรอนพท
A = เมทรกซระบบ B = เมทรกซควบคม C = เมทรกซเอาทพท D = transmission matrix
x = เวกเตอรตวแปรสถานะ

13
โดยท
u r Kx
เมอ r เปนสญญาขาเขาอางอง จะไดระบบวงปดทมปรภมสถานะคอ
x A BK x Br
ในสวนของปญหาการคมคา (regulator problem) หรอ 0r วตถประสงคของการออกแบบควบคมคอการหาคาอตราขยาย
u Kx
เพอใหสญญาณขาออก (output) ลเขาสศนย โดยปรภมสถานะเขยนไดเปน
x A BK x
นนคอการออกแบบคาอตราขยาย K เพอใหคาลกษณะเฉพาะ (eigenvalue) ทกตวของเมทรกซ A BK มเสถยรภาพ

14
อปกรณและวธการ
อปกรณ ในสวนของอปกรณการทดลองจะแบงออกเปน 3 สวนหลกๆ คอ ชดการทดลองระบบลกตมหวกลบสองแกน อปกรณควบคม และสวนของซอฟทแวรคอมพวเตอร
1. ชดการทดลองระบบลกตมหวกลบสองแกน เปนชดการทดลองทไดออกแบบและจดท าขนภายในหองปฏบตการ โดยมโครงสรางอยางคราวๆตามภาพท ประกอบดวย สวนส าคญๆดงน 1.1 แทงอลมเนยมหนา 1.5 มลลเมตร ซงถกออกแบบใหเปนกานลกตมโดยมความยาว 30 เซนตเมตร และ 52 เซนตเมตร ตามล าดบ
ภาพท 12 ลกตมชนท 1
ภาพท 13 ลกตมชนท 2

15
1.2 monocarrier ของ NSK รน MCM06040H20K ส าหรบเปลยนการเคลอนทเชงมมของการหมนของมอเตอรกระแสตรงใหเปนการเคลอนทเชงเสนของตวรถ มรายละเอยดดงภาพ
ภาพท 14 monocarrier ทถกน ามาใชเปนอปกรณเปลยนการหมนเปนการเคลอนทของรถ
ภาพท 15 รายละเอยดของอปกรณทใชงาน (MCM06040H20K00) 1.3 ตวตรวจร เปนอปกรณในการเปลยนการเคลอนทเชงกลเปนรปแบบของสญญาณทางไฟฟาเพอใหคอมพวเตอรสามารถอานคาได ในชดการทดลองไดท าการตดตงตวตรวจร จ านวน 3 ตว คอ rotary encoder ของ Omron รน E6B2-CWZ6C ความละเอยดขนาด 2000 ครงตอรอบ

16
จ านวน 2 ตว ในการวดการหมนของกานลกตมทงสองกาน และ rotary encoder ภายในตวมอเตอรกระแสตรงขนาด 500 ครงตอรอบ 1 ตว ส าหรบวดการหมนของมอเตอร
ภาพท 16 rotary encoder 1.4 DC servo motor 1 ตว ส าหรบขบไปยง monocarrier เพอควบคมระบบในการรกษาเสถยรภาพของลกตม ในทนใชอปกรณของ Sanyodenki ขนาด 12V 55W 200 rpm โดยมตวตรวจร rotary encoder ภายในตวมอเตอร
ภาพท 17 มอเตอรกระแสตรง 2. อปกรณควบคม ในการควบคมจะใชคอมพวเตอรโดยอาศยโปรแกรม LabVIEW ในการควบคม
2.1 คอมพวเตอรจ านวน 2 เครอง ประกอบดวย host computer ส าหรบการตดตงโปรแกรม ทจ าเปนในการออกแบบระบบควบคม เชน Matlab, LabVIEW และเปนสวนตอประสาน

17
กบผใช และ target computer เปนหนวยควบคมโดยตรงไปยงระบบ โดยท าการรบค าสงทไดรบการออกแบบมาจาก host computer ผานทาง TCP/IP และภายในตดตงระบบปฏบตการ LabVIEW Real-time 2.2 data acquisition (DAQ) ของ National Instrument รน PCI-6221 จ านวน 2 ชด ท าหนาทรบ-สงสญญาณระหวาง target computer และอปกรณตางๆ ซงตวการดจะถกตดตงบน target computer การใชงานจะใชงานในสวนของ counter input 3 ชองสญญาณ และ analog output จ านวน 1 ชองสญญาณ รายละเอยดเพมเตมไดท www.ni.com
ภาพท 18 NI DAQ PCI-6221 2.3 วงจรขยายสญญาณ (power amplifier) ส าหรบขยายสญญาณในการขบมอเตอรกระแสตรง ท าหนาทขยายสญญาณจากตวควบคมทมแรงดนต าใหมแรงดนทสงขนโดยมแหลงไฟฟาจากภายนอกและควบคมทศทางของมอเตอรกระแสตรง ในงานวจยนไดใชอปกรณรน Sabertooth 2X20 เปนอปกรณขยายสญญาณซงสามารถดรายละเอยดเพมเตมไดท www.dimensionengineering.com

18
ภาพท 19 วงจรขยายสญญาณ Sabertooth 2X20 2.4 DC power supply ส าหรบเปนแหลงพลงงานของอปกรณตางๆ
ภาพท 20 DC power supply 3. ซอฟทแวร 3.1 Microsoft Windows XP เปนระบบปฏบตการส าหรบเครอง host computer เปนระบบปฏบตการทไดรบความนยมอยางแพรหลาย 3.2 Mathwork Matlab ซอฟทแวรทใชในการออกแบบตวควบคมและจ าลองระบบเพอการวเคราะหผลการทดลอง

19
3.3 National Instrument LabVIEW ซอฟทแวรส าหรบออกแบบกระบวนการท างานของโปรแกรมเชงภาพ และพฒนาการทดลองระบบควบคมกบอปกรณจรง 3.4 National Instrument LabVIEW Real-Time OS ระบบปฏบตการส าหรบการแบบ real-time ทถกตดตงลงบน target computer
ภาพท 21 ชดการทดลองระบบลกตมหวกลบสองแกนภายในหองปฏบตการ

20
วธการ
วธการในงานวจยนแบงออกเปนขนตอนทส าคญ คอ การสรางแบบจ าลองทางคณตศาสตร (mathematical modeling), การออกแบบตวควบคม (controller design), การจ าลองระบบ (simulation) และ การท าตวควบคมไปทดสอบกบระบบจรง (implementation) 1. การสรางแบบจ าลองทางคณตศาสตรของลกตมหวกลบ การออกแบบตวควบคมทตองใชแบบจ าลอง (model-based control) จ าเปนทจะตองมแบบจ าลองของระบบ โดยการหาแบบจ าลองของระบบสามารถท าไดหลายวธ เชน การใชกฎของนวตน หรอการใชสมการของลากรานจ เปนตน ในทนจะน าสมการของลากรานจมาใชในการหาแบบจ าลองทางคณตศาสตร โดยสมการลากรานจส าหรบระบบพลศาสตรสามารถเขยนไดดงน
1,2,...,i
i i i
d T T UQ i n
dt q q q
โดยท T แทนพลงงานจลนรวมของระบบ U แทนพลงงานศกยรวมของระบบ iq แทน generalized coordinate iQ แทน generalized force i แทน อนดบของพกด ส าหรบงานวจยนไดท าการออกแบบและจดท าระบบลกตมหวกลบเพอใชในการทดลองขน โดยระบบประกอบดวย มอเตอรกระแสตรงซงท าการขบเคลอนตวรถ ผานทาง monocarrier โดยมลกตมทงสองตดบนตวรถ

21
xc
1
y2
ภาพท 22 ระบบลกตมหวกลบสองแกน ระบบลกตมหวกลบมโครงสรางดงแสดงในภาพท 22 โดยใหตวหอย 0 แทนตวรถ ตวหอย 1 แทนลกตมท1 และ ตวหอย 2 แทนลกตมท 2 สมการการเคลอนททไดคอ (รายละเอยดการค านวณดไดจากภาคผนวก ก)
0 1 2 0 1 1 2 1 1 1 2 2 2 2
2 2
1 1 2 1 1 1 2 2 2 2
0 0
2 2
1 1 2 1 1 0 1 1 2 1 1 1 2 1 2 1 2 2
1 1 2 1 1 0 1 2 1 2 1 2 2 1 2
1 1
cos cos
sin sin
cos cos
sin sin ( )
sin
m m m x m l m L m l
m l m L m l
F c x
m l m L x m l m L J m L l
m l m L x m L l
m l
1 0 1 2 1 1 0 1 2 1 2 1 2 1 2
1 1 2 1 1
1 1
2
2 2 2 2 2 2 2 0 2 2 2 0 2
2 1 2 1 2 1 2 1 2 1 2 1 1 2
2 1 2 1 2 1 2
2 2 2
2 2
sin cos
( ) sin
cos sin
cos sin
sin
sin
x m L x m L l
m l m L g
c
m l J m l x m l x
m L l m L l
m L l
m gl
c

22
เมอ
l แทน ระยะจากจดหมนถงจดศนยกลางมวล L แทนความยาวของลกตม, m แทนมวลของลกตม, c แทนคาคงทความเสยดทาน พารามเตอรตางๆของระบบดงตารางท 1 ตารางท 1 พารามเตอรของระบบ
พารามเตอร ปรมาณ หนวย
0m 1 Kg
1m 0.3 Kg
2m 0.3 Kg
1L 0.3 m
2L 0.6 m
1l 0.15 m
2l 0.3 m
0c 0.1 N·s/m
1c 0.0011* N·s/m
2c 0.0004* N·s/m
1J 0.0034* kg·m2
2J 0.0117* kg·m2 หมายเหต * คาทไดจากการทดลอง เพอใหสมการการเคลอนทสามารถน าไปใชในการออกแบบดวยวธการเชงเสนจงตองท าใหเปนสมการเชงเสน (linearization) โดยพจารณารอบจดสมดลบน 1 2, 0 โดยให
sin( ) , cos 1, 0 จากสมการทง 3 เขยนไดใหมคอ
23
0 1 2 0 1 1 2 1 1 2 2 2 0 0
2 2
1 1 2 1 0 1 1 2 1 1 1 2 1 2 2 1 1 1 1 2 1 1
2
2 2 0 2 1 2 1 2 2 2 2 2 2 2 2 2
( )
m m m x m l m L m l F c x
m l m L x m l m L J m L l c m l m L g
m l x m L l m l J c m gl
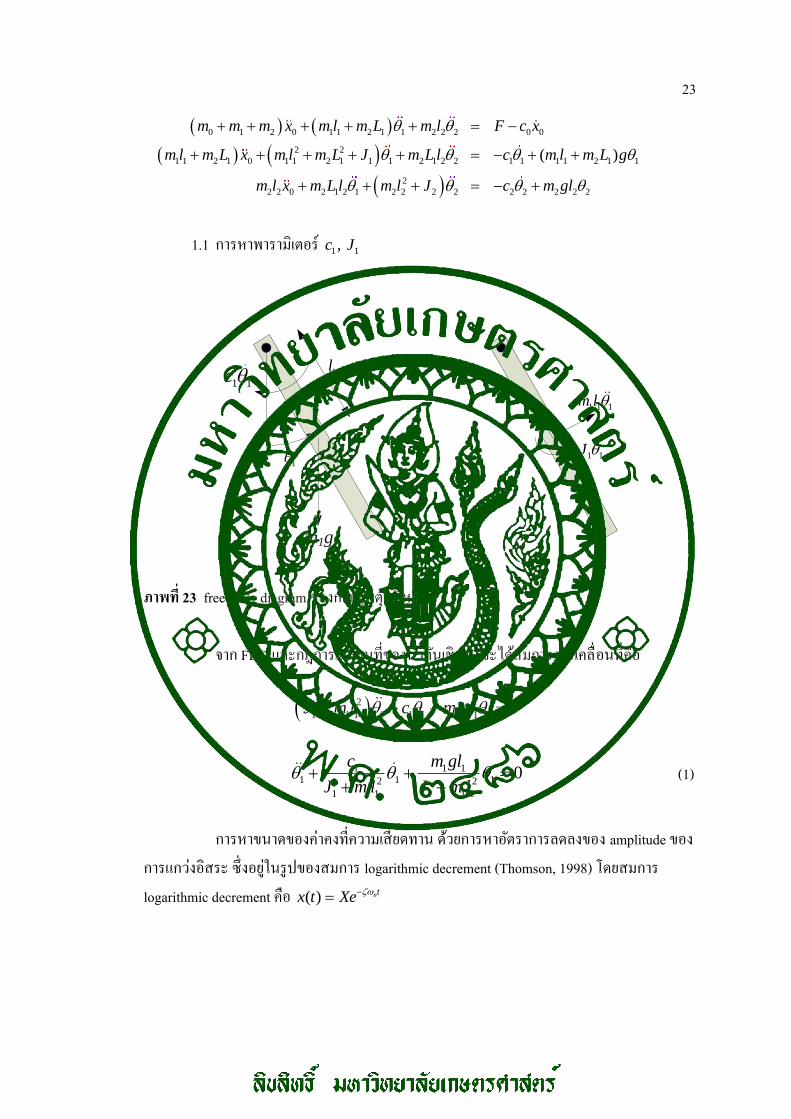
1.1 การหาพารามเตอร 1 1,c J
m1g
1 1c
1
1l
1 1 1m l
1 1J
ภาพท 23 free body diagram ของกานลกตมทหนง จาก FBD และกฎการเคลอนทของนวตนเชงมม จะไดสมการการเคลอนทคอ
2
1 1 1 1 1 1 1 1 1 0J m l c m gl
1 1 11 1 12 2
1 1 1 1 1 1
0c m gl
J m l J m l
(1)
การหาขนาดของคาคงทความเสยดทาน ดวยการหาอตราการลดลงของ amplitude ของการแกวงอสระ ซงอยในรปของสมการ logarithmic decrement (Thomson, 1998) โดยสมการ logarithmic decrement คอ ( ) ntx t Xe

24
ภาพท 24 การทดลองทดสอบหาคาพารามเตอร 1 1,c J
โดยกานลกตมถกปลอยทต าแหนงสถานะเรมตน 15 , 0 ผลทไดดงภาพท 25
ภาพท 25 ผลตอบสนองจากปลอยกานลกตมกานท 1 อยางอสระ ทจดเรมตน 15 องศา จากสถานะเรมตน 15X สามารถสรปไดดงตารางท 2

25
ตารางท 2 คาพารามเตอรทไดจากการแกวงอยางอสระของกานลกตมกานทหนง
พารามเตอร คาทได หนวย
d 0.9559 sec
d 6.5735 rad/sec
0.008 - โดยจากภาพท 25 เสนประแสดงสมการของ logarithmic decrement คอ
(0.008)6.5735( ) 0.2618 tx t e
จากสมการ (1) แทนคาตวแปรได
1 1 10.1052 43.2110 0
เปรยบเทยบกบรปทวไปของระบบ mass-spring-damper คอ
22 0n n
ท าการเทยบสมประสทธได 1 0.0011c และ 1 0.0034J

26
1.2 การหาพารามเตอร 2 2,c J
2 2 2m l
2 2J
2 2c
2
2l
2mg
2 2pJ
ภาพท 26 free body diagram ของกานลกตมทสอง เชนเดยวกบการหา 1 1,c J จาก FBD และกฎการเคลอนทของนวตนเชงมม จะไดสมการการเคลอนทคอ
2
2 2 2 2 2 2 0J m l c m gl
2 2 2
2 2
2 2 2 2 2 2
0c m gl
J m l J m l
(2)
27
ภาพท 27 การทดลองทดสอบหาคาพารามเตอร 2 2,c J โดยกานลกตมถกปลอยทต าแหนงสถานะเรมตน 15 , 0 ผลทไดดงภาพท 28 เชนเดยวกน สมการ logarithmic decrement คอ ( ) ntx t Xe
ซงจากสถานะเรมตน
15X สามารถสรปไดดงตารางท 2 ตารางท 3 คาพารามเตอรทไดจากการแกวงอยางอสระของกานลกตมกานทสอง
พารามเตอร คาทได หนวย
d 1.3158 sec
d 4.7752 rad/sec
0.0012 - โดยจากภาพท 28 เสนประแสดงสมการของ logarithmic decrement คอ
(0.0012)4.7752( ) 0.2618 tx t e

28
ภาพท 28 ผลตอบสนองจากปลอยกานลกตมกานท 2 อยางอสระ ทจดเรมตน 15 องศา

29
จากสมการ (2) แทนคาตวแปรได
0.0115 22.8025 0
เปรยบเทยบกบรปทวไปของระบบ mass-spring-damper
22 0n n
ท าการเทยบสมประสทธได 2 0.0004c และ 2 0.0117J จากการค านวณคาโมเมนตความเฉอยของกานลกตมสามารถหาไดจากสตร
2
1 1 11/12J m L ได 2
1 0.0023J kg m มความคลาดเคลอนอยประมาณ 48% ในท านองเดยวกน 2
2 2 21/12J m L ได 2
2 0.009J kg m ซงมความคลาดเคลอนประมาณ 89% แตเนองจากคาโมเมนตความเฉอยมคานอยซงสงผลตอสมการระบบไมมากนก จงเลอกใชคาทไดจากการทดลอง ซงความคาดเคลอนทเกดขนเกดจากลกษณะของกานลกตมบางต าแหนงทยากทจะค านวณอยางละเอยด เชน ต าแหนงของ rotary encoder หรอ สายสญญาณตางๆ 1.3 การหาพารามเตอร 2, 0 1 3k c k k
F 0 0c x 0 0m x
0x
ภาพท 29 free body diagram ของตวรถ จากภาพและกฎขอท 2 ของนวตน สมการการเคลอนทของรถ คอ
0 0 0m x cx F (3)
สมการความสมพนธของ monocarrier คอ ( m คอการหมนทเกดขนเนองจากมอเตอร)
1 0m k x (4)

30
ความสมพนธของมอเตอรกระแสตรง คอ
2 3 mF k v k (5)
Amplifier Motor Monocarrier
v x0kAv M
ภาพท 30 การตออปกรณการทดลองหาคาพารามเตอรทจ าเปนของตวขยายสญญาณ มอเตอร และ monocarrier (open-loop)
เมอแทน (4), (5) ใน (3) ดงนนสมการการเคลอนทรวมจะไดเปน
0 0 0 1 3 0 2m x c k k x k v (6)
0 1 30
0 0
2 2
c k kmx x v
k k
(7)
ท าการประมาณคาของสมประสทธ 0 1 3 2/c k k k และ 0 2/m k จากสมการ (7) ดวยวธ linear lease square โดยท าการปอนคาสญญาณฟงกชน sin 2 ( )v f t t โดยปรบความถของสญญาณเปลยนแปลงจาก 0.1 ถง 1 เฮรท ในชวงเวลา 15 วนาท เพอใหครอบคลมชวงการท างานของมอเตอร โดยมสญญาณ v ผลตอบสนองทไดดงภาพท 31 ท าการหาคาพารามเตอรดวยค าสง lsqlin จากโปรแกรม Matlab ไดคาพารามเตอรตางๆคอ
0 0 1 3
2 2
0.0352, 6.5227m c k k
k k
เมอท าการแทนคา พารามเตอรทไดจากการทดลอง คอ
1 157.0796k 2 / 0.04
2 28.3873k 0 1 3 185.1620c k k
31
ภาพท 31 แสดงสญญาณไฟฟาปอนเขามอเตอรกระแสตรง(บน) และผลตอบสนองของตวรถ(ลาง)
ภาพท 32 การทดลองการหาคาพารามเตอรของ DC servo motor และ monocarier
32
ภาพท 33 เปรยบเทยบผลตอบสนองของระบบทไดจากการจ าลองและผลตอบสนองจรง โดยสมมตใหตวรถมมวลเทยบเทา 1 Kg และมสมประสทธความเสยดทาน 0.1 Nm
0 1 2 1 1 2 1 2 2 0 2 0 1 3 0
2 2
1 1 2 1 1 1 2 1 1 2 1 2 1 1 1 1 1 2 1 1
2
2 2 2 1 2 2 2 2 2 2 2 2 2 2
( )
( )
m m m m l m L m l x k v c k k x
m l m L m l m L J m L l c m l m L g
m l m L l m l J c m l g
เขยนในรปเมทรกซ คอ
0 0
1 1 1
2 2 2
1.6 0.135 0.09 28.3873 185.1620
0.135 0.0372 0.027 0.0011 1.3244
0.09 0.027 0.0387 0.0004 0.8829
x v x
เขยนในรปปรภมสเตต เมอ 1 2 3 4 5 6
Tx x x x x x x โดยท
1 0 2 1 3 1 4 3 5 2 6 5, , , , ,x x x x x x x x x x ไดคอ

33
1 1
2 2
3 3
4 4
5 5
6 6
0 1 0 0 0 0 0
0 167.42 4.72 0 0.34 0 25.67
0 0 0 1 0 0 0
0 660.16 90.94 0.07 34.98 0.02 101.21
0 0 0 0 0 1 0
0 71.22 52.46 0.04 46.43 0.02
x x
x x
x x
x x
x x
x x
10.92
v
โดยสมการเอาทพทระบบคอ
y Cx
เมอ
1 0 0 0 0 0
0 0 1 0 0 0
0 0 0 0 1 0
C
ระบบมคาลกษณะเฉพาะท 0, -167.55, -10.12, -4, 10, 4 ซงมคาลกษณะเฉพาะบางคามากกวาศนยหรออยบน RHP ซงท าใหเปนระบบไมมเสถยรภาพ 2. การออกแบบตวควบคมส าหรบลกตมหวกลบ ในสวนของการออกแบบการควบคมจะท าการออกแบบการควบคมดวยการควบคมเหมาะสมทสด (optimal control) (เดวด, 2551; วบลย, 2548; Ogata, 1997) จากวธการออกแบบการคมคาก าลงสองเชงเสน (linear quadratic regulator, LQR) เพอใหเปนไปตามหลกการควบคม จ าเปนทระบบจะตองมคณสมบตการควบคมได และการสงเกตได (controllability and observability) 2.1 คณสมบตการควบคมได (controllability) ส าหรบระบบทควบคมได (controllable) หมายถง ระบบมสญญาณควบคมทสามารถเคลอนสถานะของระบบจากต าแหนงเรมตนไปยงต าแหนงใดๆทตองการไดในชวงเวลาหนง โดยสามารถหาความควบคมไดของระบบไดจาก

34
2 1nrank B AB A B A B n
ซงสามารถหาไดโดยใชค าสง rank(ctrb(A,B)) บนโปรแกรม Matlab ซงในทนระบบลกตมหวกลบสองแกนม
2 3 4 5 6rank B AB A B A B A B A B (8)
2.2 คณสมบตการสงเกตได (observability) ส าหรบระบบทสงเกตได (observable) หมายถง ระบบทเวลาใดๆ สามารถทราบคาสถานะได จากการพจารณาสญญาณเอาทพท ณ ชวงเวลาหนง โดยสามารถหาความสงเกตไดของระบบไดจาก
12 n TT T T T T Trank C A C A C A C n
ซงสามารถหาไดโดยใชค าสง rank(obsv(A,C)) บนโปรแกรม Matlab ซงในทนระบบลกตมหวกลบสองแกนม
2 5 6T T T T T T Trank C A C A C A C (9)
ดงนนจาก (8) และ (9) ระบบดงกลาวจงมคณสมบต การควบคมได และ การสงเกตได
2.3 ตวควบคมก าลงสองเชงเสน (linear quadratic regulator, LQR)
ในสวนนจะกลาวถงการควบคมดวยวธ LQR (Naidu, 2003; Ogata, 1997) ซงเปนวธการควบคมทไดใชงานวจยน เปนวธการหนงของการควบคมแบบเหมาะสมทสด (optimal control) ขอไดเปรยบของวธการควบคมก าลงสองเหมาะสมทสดทแตกตางจากวธการวางโพลกคอผออกแบบสามารถก าหนดลกษณะทศทางของระบบกอนไดตามการปรบคาน าหนก (weight) และมลกษณะการหาอตราการขยายทเปนแบบแผนมากกวา
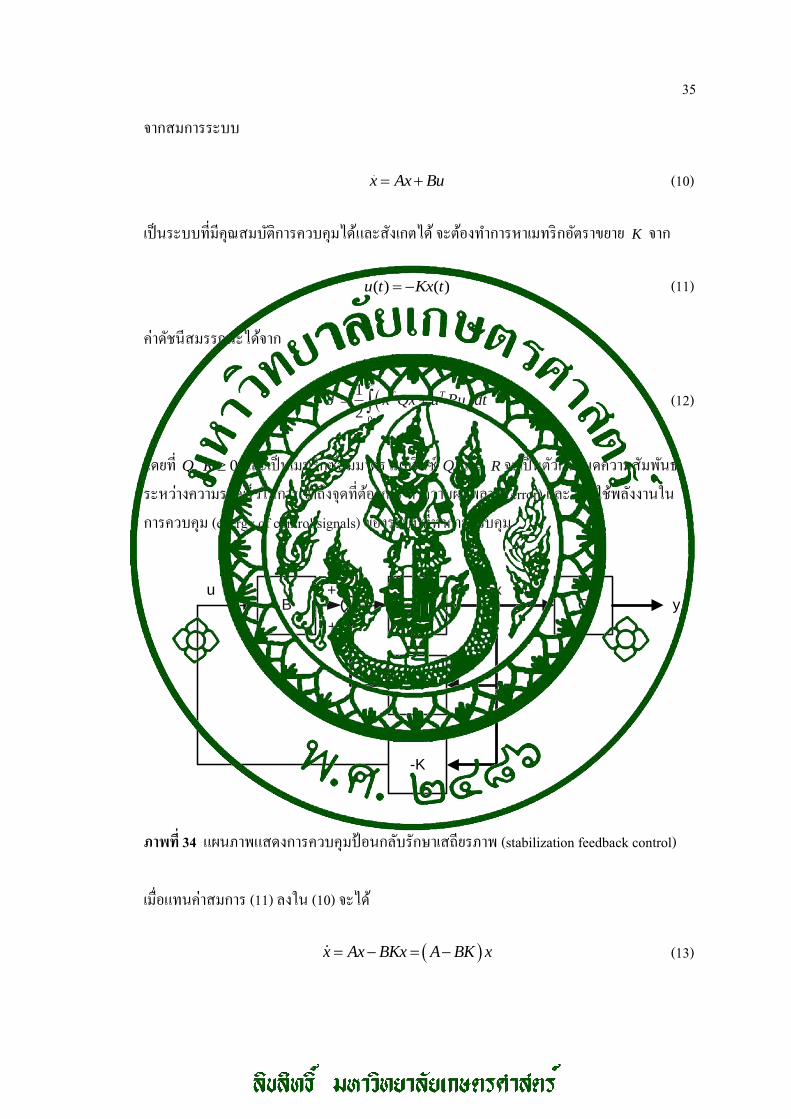
35
จากสมการระบบ
x Ax Bu (10)
เปนระบบทมคณสมบตการควบคมไดและสงเกตได จะตองท าการหาเมทรกอตราขยาย K จาก
( ) ( )u t Kx t (11)
คาดชนสมรรถนะไดจาก
0
1
2
T TJ x Qx u Ru dt
(12)
โดยท , 0Q R และเปนเมทรกซสมมาตร เมทรกซ Q และ R จะเปนตวก าหนดความสมพนธระหวางความรวดเรวในการเขาถงจดทตองการ คาความผดพลาด (error) และ การใชพลงงานในการควบคม (energy of control signals) ของระบบทท าการควบคม
uB yò C
A
-K
xx’
+
+
ภาพท 34 แผนภาพแสดงการควบคมปอนกลบรกษาเสถยรภาพ (stabilization feedback control) เมอแทนคาสมการ (11) ลงใน (10) จะได
x Ax BKx A BK x (13)

36
ระบบจะมเสถยรภาพเมอเมทรกซ A BK เปนเมทรกซทมคาลกษณะเฉพาะนอยกวาศนยหรอมเครองหมายเปนลบ แทนคาสมการ (11) ลงในสมการ (12) จะได
0
T T TJ x Qx x K RKx dt
0
T TJ x Q K RK xdt
(14)
ก าหนดให T T Tdx Q K RK x x Px
dt
TT T T T Tx Q K RK x x Px x Px x A BK P P A BK x
T TA BK P P A BK Q K RK (15)
เมอ A BK เปนเมทรกซทมเสถยรภาพ จะม P >0 และเปนเมทรกซสมมาตร ทสอดคลองกบสมการ (15) และในกรณทระบบมเสถยรภาพแลวสามารถหาคา P ไดเพยงคาเดยว ดงนนคา P อนๆทไดจากการแกสมการ(15) จะไมเปนเมทรกซสมมาตรทเปนบวกแนนอน จากดรรชนสมรรถนะจะได
0
0 0T T T T TJ x Q K RK xdt x Px x Px x Px
(16)
ดงนนจะได
0 0TJ x Px
แสดงวาดรรชนสมรรถนะเปนฟงกชนของคาเรมตน 0x และเมทรกซ P เพอหาค าตอบ ก าหนดให

37
TR T T
เมอ R เปนเมทรกซสมมาตรทเปนบวกแนนอน และ T ไมเปนเมทรกซหนง จากสมการ (15) สามารถเขยนไดเปน
0T T T T TA K B P P A BK Q K T TK
1 1
1 0T
T T T T T TA P PA TK T B P TK T B P PBR B P Q
(17)
โดยพยายามท าใหคา J ต าสดโดยการปรบคา K หรอตองการคาต าสดของ
1 1
TT T T T Tx TK T B P TK T B P x
ซงเปนพจนทมคาเปนกงบวกแนนอนจงมคาต าสดคอศนย ซงจะเปนเชนนนเมอ
1
T TTK T B P
ดงนน
1
1 1T T TK T T B P R B P
(18)
สมการ (18) เปนสมการทใหคา K ทเหมาะสมทสดส าหรบระบบดงกลาว ดงนนเราสามารถค านวนหาสญญาณควบคมทเหมาะสมทสด คอ
1( ) ( ) Tu t Kx t R B Px t (19)
ซงเมทรกซ P ในสมการ (19) ตองสอดคลองกบสมการ (17) หรอทลดรปลงดงสมการ (20) เรยกวา Reduced-matrix Riccati Equation คอ
1 0T TA P PA PBR B P Q (20)

38
สรปการออกแบบตวควบคมดวยเทคนคดงกลาว คอ แกค าตอบของสมการ Reduced-matrix Riccati Equation (20) เพอหาคาเมทรกซ P เมอปรากฏคา P ทเปนเมทรกซสมมาตรทเปนบวกแนนอนแสดงไดวา ระบบมเสถยรภาพหรอเมทรกซ A BK มเสถยรภาพ และแทนคาเมทรกซ P ในสมการ (18) เพอค านวนหาคา K ทเหมาะสมทสด การออกแบบตวควบคม LQR โดยการใชโปรแกรม Matlab ชวยในการค านวณ โดยการออกแบบตวควบคม LQR นนสามารถหาไดจากการใชค าสง
, , , ,K S E lqr sys Q R
โดยจะท าการจ าลองผลตอบสนองจากการใชคาน าหนก Q และ R ตางๆกน โดยใหสถานะเรมตนท
[0 0 0 0 0.1 0]Tx
และเปรยบเทยบผลตอบสนองทไดจากคาน าหนกตางๆ ตารางท 4 คาน าหนกและอตราขยายทใชในการออกแบบ
คาน าหนก (Q, R) อตราขยาย
1 Q1 = diag([1,1,1,1,1,1]) R 1= 1
K = [1 0.79 -45.92 1.35 94.14 15.87]
2 Q2 = diag([1000,100,70000,500,100000,10]) R2 = 100
K = [3.16 3.14 -66.36 1.88 143.23 23.18]
3 Q3 = diag([1000,100,70000,100,50000,10]) R 3= 100
K = [3.16 2.93,-55.13,2.36,125.76,20.71]
4 Q4 = diag([1000,100,70000,500,100000,10]) R4 = 1000
K = [1.0 0.72 -42.44 1.51 89.93 15.16]

39
ภาพท 35 ผลการจ าลองระบบดวย MATLAB ทคาน าหนก Q, R ตางๆ ตามตารางท 1

40
2.4 การออกแบบตวสงเกตสถานะ ในการออกแบบระบบควบคมโดยอาศยการปอนสถานะนน บางครงเราไมสามารถทจะวดคาสถานะทจ าเปนไดทงหมด เนองจากคาสถานะบางอยางไมสามารถวดไดโดยงายหรอตองใชอปกรณทมความซบซอน มราคาแพง มาใชในการวดคาสญญาณ จงจ าเปนตองใชการประมาณคาสถานะ(observation) มาชวยในการออกแบบ โดยอาศยอปกรณ เชน โปรแกรมคอมพวเตอร มาชวยในการค านวณเรยกวา ตวสงเกตสถานะ (state observer) หรอบางครงเรยกวา ตวประมาณสถานะ (state estimator)ในกรณทสถานะทกสถานะทม ถกประมาณโดยตวสงเกตสถานะจะเรยกวา ตวสงเกตสถานะอนดบเตม (full-order state observer) อยางไรกตามในกรณทบางสถานะสามารถวดไดจงไมจ าเปนตองท าการประมาณคาทกสถานะเรยกวาตวสงเกตสถานะลดอนดบ (reduce-order observer) ในกรณทสถานะทถกประมาณโดยตวสงเกตสถานะนอยทสดจะเรยกวา ตวสงเกตสถานะอนดบต าสด (minimum-order observer) 2.5 ตวควบคมคาก าลงสองเชงเสนและตวสงเกตแบบอนดบเตม
∫
B
A
C
∫
B
A
C
Ke
+
+
+
+
+
+
+
-
u x y
y~
State Observer
x x
ภาพท 36 บลอกไดอะแกรมของระบบทมตวสงเกตสถานะอนดบเตม
41
ระบบถกก าหนดดวยสมการสถานะ คอ
x Ax Bu (21)
y Cx (22)
ตวประมาณคาสถานะระบบจะถกจ าลองระบบจรงโดย แบบจ าลองคณตศาสตรของตวสงเกตจะเหมอนกบแบบจ าลองคณตศาสตรของระบบ จะแตกตางกนในสวนของคาความผดพลาดโดยตวสงเกตจะประมาณคาจากเอาทพตจรงลบดวยคาประมาณเอาทพต คาประมาณทไดจากตวสงเกตคอ
ex Ax Bu K y Cx
e ex A K C x Bu K y (23)
สมการความผดพลาดของการสงเกต (observer error equation) ไดจากสมการ (21)-(23) คอ
e ex x Ax Ax K Cx Bu K y
ex x A K C x x (24)
แทนคา x x ดวยเวกเตอรความผดพลาด e จาก (24) เขยนใหมไดเปน
ee A K C e (25)
ซงถาเมทรกซ eA K C มเสถยรภาพซงไดจากการหาคาลกษณะเฉพาะ หมายความวาเวกเตอรความผดพลาดจะลเขาสคาศนยเมอเวลาผานไป คาลกษณะเฉพาะนยงเปนตวก าหนดความเรวในการลเขาของเวกเตอรความผดพลาด ซงคาลกษณะเฉพาะนสามารถก าหนดไดโดยอตราขยาย eK จากสมการสถานะ (21) เมอระบบถกควบคมโดยอนพทไดจากการสงเกต คอ
u Kx (26)

42
สมการสถานะของระบบ (21) เมอมอนพต (26) จะเขยนไดเปน
x Ax BKx
x A BK x BK x x
หรอ
x A BK x BKe (27)
จาก (27) และ (25) จงเขยนเปนเมทรกซรวมไดเปน
( ) ( )
0( ) ( )e
A BK BKx t x t
A K Ce t e t
(28)
สมการ (28) อธบายถงลกษษณะทางพลศาสตรของระบบปอนกลบทมตวสงเกตสถานะ โดยมสมการลกษณะเฉพาะคอ
00 e
sI A BK BK
sI A K C
หรอ
0esI A BK sI A K C
ดงนนระบบปอนกลบทมตวสงเกตสามารถแยกปญหาการออกแบบอตราขยายของระบบออกจากการออกแบบอตราขยายตวสงเกตไดโดยไมขนตอกน และระบบทมตวสงเกตแบบอนดบเตมส าหรบระบบทมอนดบเทากบ n กจะมตวสงเกตทมอนดบเทากบ n เชนกน นนคอสมการสถานะ (28) จะมอนดบเทากบ 2n
แบบจ าลองคณตศาสตรของตวสงเกตจะเหมอนกบแบบจ าลองคณตศาสตรของระบบ จะแตกตางกนในสวนของคาความผดพลาดโดยตวสงเกตจะประมาณคาจากเอาทพตจรงลบดวยคาประมาณเอาทพต คาประมาณทไดจากตวสงเกตคอ
43
e e ex Ax Bu K y Cx A K C x Bu K y (29)
โดยท x คอคาประมาณเสตต, Cx คอคาประมาณเอาทพต โดยทมเอาทพทของระบบ y และ สญญาณควบคม u เปนอนพตของตวสงเกต และม
eK เปนอตราขยายของตวสงเกตซงเปนคาน าหนกส าหรบการปรบปรงคาความผดพลาดระหวางคาเอาทพตจรงและคาเอาทพตจากการประมาณ คณสมบตทวภาค (duality) ก าหนดให
T Tz A z C v
และ
Tn B z
ระบบดงกลาวเรยกวา dual system และก าหนดใหมคณสมบตการสามารถควบคมไดดงนนอตราขยาย K สามารถหาไดจากวธการวางโพล T TA C K ใหมคาลเขา คาลกษณะเฉพาะของ
T TA C K และ T TA K C จะมคาเทากน
T T T TSI A C K SI A K C (30)
จากสมการ (30) และ (29) จะไดความสมพนธคอ
T
eK K
ดงนนจากความมคณสมบต duality สามารถหาอตราขยายตวสงเกต eK ไดจากการหาอตราขยาย K ซงสามารถหาไดจากวธการวางโพล ซงการออกแบบตวสงเกตอนดบเตมจากสมการ
T T T
ez A C K z (31)
ดงนนจะได
44
0T T T
esI A C K
จากการออกแบบโดยใหคาอตราขยาย 1 0.79 45.92 1.35 94.14 15.87K ไดคาลกษณะเฉพาะคอ -197.83, -9.39+2.3i, -
9.39-2.3i, -3.8+6.3i, -3.8-6.3i, -0.15 ท าการเลอกคาโพลของตวสงเกตท –10, -11, -12, -13, -14 และ -15 อตราขยายทไดจากการค านวณคอ
90 17960 7980 195370 24730 191000T
eK

45
ภาพท 37 การจ าลองการรกษาเสถยรภาพของระบบควบคมก าลงสองเชงเสนทมตวสงเกตอนดบเตม

46
2.6 ตวควบคมคาก าลงสองเชงเสนและตวสงเกตแบบลดอนดบ เนองจากสถานะบางสถานะสามารถวดไดดวยอปกรณตรวจร คอ มมของกานลกตมทงสอง ซงมความแมนย าสงจงไมมความจ าเปนตองท าการประมาณคา สวนสถานะอนๆทยงไมมความแมนย าสามารถหาคาไดจากการประมาณดวยตวสงเกต
∫
B
A
C+
+u x y
Minimum-order
observerTransformation-K
Plant
~
X
ภาพท 38 บลอกไดอะแกรมของระบบทมตวสงเกตสถานะลดอนดบ อยางไรกตามการใชสญญาณทไดจากการวดมาใชในการค านวณสญญาณควบคมอาจจะไมไดผลตอบสนองทดเสมอไป เนองจากในบางครงสญญาณทวดไดอาจจะมสญญาณรบกวนตางๆ (noise) ท าใหเกดความผดพลาดได จงอาจจะตองพจารณาระหวางสญญาณรบกวนและความแมนย าของสญญาณเอาทพทในการออกแบบ เชนเดยวกบในกรณของตวสงเกตอนดบเตม การประมาณคาสถานะทไดมาจากคาอนพทและคาเอาทพท ระบบจ าเปนตองมคณสมบตการควบคมไดและคณสมบตการสงเกตได โดยระบบคอ
x Ax Bu (32)
และ
47
y Cx (33)
เมอสถนะของระบบแบงไดเปนสองสวน คอ สวนทวดไดแทนดวย ax ซงจะมคาเทากบสญญาณขาออก y และ สวนทวดไมไดแทนดวย bx สมการสถานะและสมการเอาทพตสามารถเขยนรวมกนไดคอ
a aa ab a a
b ba bb b b
x A A x B
u
x A A x B
(34)
1 0
a
b
x
y
x
ในทน คอ
0ax x
0 1 1 2 2, , , ,T
bx x
จากสมการ (34) ได
a aa a ab b ax A x A x B u (35)
a aa a ab b ax A x A x B u (36)
ซง จากสมการ (36) จะเหนวาฝงซายจะเปนปรมาณทสามารถวดคาไดจากเอาทพต ซงสามารถทราบคาได สวนฝงขวาจะเปนปรมาณทไมทราบคา และจาก (34) จะไดความสมพนธอกสมการหนงคอ
b ba a bb b bx A x A x B u (37)
จะเหนวา ba aA x และ bB u คอสวนทวดคาได ดงนนสมการสถานะส าหรบตวสงเกตอนดบต าสดคอ

48
b bb b ba a bx A x A x B u
และสมการเอาทพตส าหรบตวสงเกตอนดบต าสดคอ
a aa a a ab bx A x B u A x
เปรยบเทยบคาในลกษณะเดยวกบการออกแบบตวสงเกตอนดบเตม ไดคาตางๆตามตารางท 4 จากสมการ (23) เขยนในรปของตวสงเกตอนดบต าสดไดเปน
b bb b e ab b ba a b e a aa a ax A x K A x A x B u K x A x B u (38)
ตารางท 5 เปรยบเทยบตวแปรระหวางตวสงเกตอนดบเตมและตวสงเกตลดอนดบ
ตวสงเกตอนดบเตม ตวสงเกตลดอนดบ
x bx
A bbA
Bu ba a bA x B u y a aa a ax A x B u
C abA
eK eK เมอ eK คออตราขยายส าหรบตวสงเกต จากสมการ (38) ท าการจดเรยงใหมไดเปน
b e a bb b e ab b ba a e aa a b e a
bb b e ab b e a
bb e ab e ba e aa a b e a
x K x A x K A x A x K A x B K B u
A x K A x K x
A K A K A K A x B K B u
ax y ดงนน

49
b e a bb b e ab b e a
bb e ab e ba e aa b e a
x K x A x K A x K x
A K A K A K A y B K B u
(39)
แทนคา b e b e ax K y x K x และ b e b e ax K y x K x สมการ (39) เขยนใหมไดเปน
bb b e ab bb e ab e ba e aa b e aA x K A A K A K A K A y B K B u (40)
ก าหนดให
ˆ
ˆˆ
ˆ
bb e ab
e ba e aa
b e a
A A K A
B AK A K A
F B K B
สมการ (40) จะเขยนไดเปน
ˆ ˆ ˆA By Fu (41)
จาก
1 0
a
b
x
y
x
0a m
b e
b b n m e
x y I
x x K y y
x x I K
(42)
เมอ 0m คอเวกเตอรแถวมคาเปนศนย ถาก าหนดให

50
0
ˆ ˆ,
m
n m e
I
C D
I K
สามารถเขยน x ในรปของ และ y ไดเปน
ˆ ˆx C Dy (43)
ซงเปนสมการแสดงความสมพนธระหวาตวแปร x และ สมการ (32), (33), (41), (43) และ u Kx สามารถอธบายไดดวยบลอกไดอะแกรมดง ภาพท 39
B
A
C
+
+u x y
-K
Plant
~
X
Bb-KeBa
Aba-KeAaa
Ke
Abb-KeAab
∫
∫0
I
e
I
K
+
+
+
++
+
+
Minimum-order observer
Transformation
ภาพท 39 ระบบปอนกลบทมตวสงเกตสถานะลดอนดบ

51
สมการความผดพลาดจากการสงเกต โดยจากสมการ (36) และ (38) เขยนไดเปน
b bb e ab b ba a b e ab bx A K A x A x B u K A x (44)
(37) - (44)
b b bb e ab b bx x A K A x x (45)
ให b be x x จาก (45) เขยนไดเปน
bb e abe A K A e (46)
จากการแทนคา u Kx ในสมการสถานะ ได
0
a
b
a
b
xx Ax BKx Ax BK
x
xAx BK
x e
Ax BK xe
0
a bx Ax B K Ke
(47)
เมอรวม (47) และ (46) จงเขยนเปนเมทรกซใหมไดเปน
0
b
bb e ab
A BK BKx x
A K Ae e
(48)

52
จาก
0 1 0 0 0 0
0 167.4207 4.7217 0.0039 0.3396 0.0002
0 0 0 1 0 0
0 660.1577 90.9399 0.0755 34.9756 0.0158
0 0 0 0 0 1
0 71.2247 52.4634 0.0436 46.4257 0.0210
A
0
25.6674
0
101.2092
0
10.9195
B
, 1 0 0 0 0 0
0 0 1 0 0 0
0 0 0 0 1 0
C
1
2
3
4
5
6
a
b
x
xx
xx
xx
x
x
จากการออกแบบโดยใหคาอตราขยาย 3.16 2.50 50 47.27 1.97 105.34 17.70K เลอกคาโพลของตวสงเกตท
ต าแหนง -10, -11, -12, -13 และ -14 ไดอตราขยายตวสงเกตคอ
107.5 255.2 4154.8 1123.5 7875.5T
eK

53
ภาพท 40 การจ าลองการรกษาเสถยรภาพของระบบควบคมก าลงสองเชงเสนทมตวสงเกต ลด
อนดบ
2.7 ตวควบคมคาก าลงสองเชงเสนและตวสงเกตลดอนดบทมตวอนทกรล การออกแบบระบบทแพลนทไมมตวอนทกรล (type 0 plant) มกจะท าการเพมตวอนทกรลในวงรอบเปดระหวางคาผดพลาดและพลานต การเพมตวอนทกรลเขาไปในสามารถท าใหคาผดพลาด ในสถานะอยตวมคาเปนศนยเขาสคาอางอง ในสวนนน าตวควบคมทมตวอนทกรลมาใชกบการปอนกลบสถานะของระบบลกตมหวกลบ ดงแสดงในภาพท 41

54
B
A
C
+
+u x y
-K2
Plant
x
Bb-KeBa
Aba-KeAaa
Ke
Abb-KeAab
∫
∫0
I
e
I
K
+
+
+
++
+
+
Minimum-order observer
Transformation
K1∫
-1
r
+
+
+
+
ภาพท 41 บลอกไดอะแกรมของระบบทมตวสงเกตสถานะลดอนดบและมตวอนทกรล เมอระบบคอ
x Ax Bu
และสมการเอาทพท
y Cx
จากภาพท 41 ได
ar y r x (49)
ส าหรบระบบรกษาเสถยรภาพ 0r ดงนน

55
ax (50)
ให
2 1u K x K (51)
ดงนน
2 1x Ax BK x BK (52)
2 2 1x A BK x BK x x BK (53)
จาก
0 0 0a a
b b b b
x x
x x e Fe
x x x x e I
(54)
จากสมการ (54) สมการ (53) จะเขยนไดใหมเปน
2 2 1x A BK x BK Fe BK (55)
เมอ 0
F
I
จาก (46) คอ
bb e abe A K A e (56)
(55), (56) และ (49) เขยนรวมไดเปน
2 2 1
0 0
1 0 0 0
bb e ab
x A BK BK F BK x
e A K A e
(57)

56
จากสมการ (57) ไดเมทรกซสถานะทมขนาด 12x12 ในการจ าลองระบบตอสถานะเรมตนจะเลอกคา 1 0, 0.5, 1, 2K
ภาพท 42 การจ าลองการรกษาเสถยรภาพของระบบควบคมก าลงสองเชงเสนทมตวสงเกต ลด
อนดบทมตวอนทกรล

57
3. การจ าลองระบบ การจ าลองระบบ (simulation) จะกระท าบนซอฟทแวร MATLAB โดยอาศยสมการทางคณตศาสตรและคาตวแปรตางๆจากทไดหาไวขางตน โดยท าการหาผลตอบสนองตอฟงกชนตางๆ 4. การท าตวควบคมไปทดสอบกบระบบจรง
ในการทดสอบระบบจรงจะท าการเขยนโปรแกรมการควบคมดวยโปรแกรม LabVIEW ท าการควบคมดวยระบบ real time ผานระบบปฏบตการ LabVIEW Real-time โดยท าการรบคาอนพทจาก rotary encoder เขามาค านวณและสงสญญาณเอาทพทออกไปควบคม โดยอาศยอปกรณ DAQ เปนตวรบ-สงคาระหวาง rotary encoder และ target computer
เนองจากในสวนอปกรณ DAQ สามารถสรางสญญาณอนาลอกเอาทพท ไดทขอบเขต 0 ถง 5 โวลท รวมถงในสวนของอปกรณขยายสญญาณเพอใชในการขบมอเตอรรองรบสญญาณ 0 ถง 2.5 โวลทส าหรบการหมนทวนเขมนาฬกา และ 2.5 ถง 5 โวลท ส าหรบการหมนตามเขมนาฬกา ท าใหสญญาณทเกดจากการออกแบบจ าเปนทจะตองอยในขอบเขตจ ากดนน ซงหากมการสรางสญญาณเกนขอบเขตจะท าใหการควบคมผดพลาดได
ในทนคาสถานะการเคลอนทของรถและกานลกตมไดจากการวดดวย rotary encoder สวน
ความเรวของรถและความเรวเชงมมของลกตมไดจากกระบวนการ finite different จากสญญาณการเคลอนท ดงนนสญญาณปอนกลบในทนจงเปนแบบ full-state feedback

58
ภาพท 43 ขอบเขตการท างานของอปกรณขยายสญญาณ (amplifier) การทดลองจะท าการควบคมระบบทระยะเวลาหนง โดยจะท าการบกวนระบบดวยการเคาะ
ทต าแหนงตางๆของลกตม เพอแสดงวาลกตมหวกลบสามารถทนตอการรบกวนภายนอกได โดยยงสามารถรกษาต าแหนงอางองเอาไวได
ภาพท 44 การรบกวนลกตมทต าแหนงตางๆ

59
ผลและวจารณ
ผล
ผลการทดลองประกอบดวยสองสวนคอ ผลทไดจากการจ าลองดวยโปรแกรม MATLAB และ ผลการทดลองจากระบบจรงทไดจดท าขน ผลการจ าลองดวยโปรแกรม Matlab ในกรณทระบบลกตมหวกลบไมไดรบการควบบคม สถานะตางๆของระบบจะลออกตามลกษณะของระบบทไมมเสถยรภาพ ซงมลกษณะผลตอบสนองดงภาพท 45
ภาพท 45 ผลตอบสนองของระบบเมอไมมสญญาณควบคม โดยมคาเรมตน x5 = 0.1 เรเดยน

60
จากการออกแบบระบบดวยวธการควบคมแบบก าลงสองเชงเสน จากสมการสมรรถนะโดยก าหนดคาน าหนก Q=diag[(1000,100,70000,500,100000,10])], R=100 ซงสามารถหาคาอตราขยายไดคอ
3.16 3.14 66.36 1.88 143.23 23.18K
เมอน าคาอตราขยายดงกลาวน าไปใชในการควบคมระบบลกตมหวกลบสองแกน โดยผลตอบสนองจากคาสถานะเรมตนตางคอ 0 0 0.1 0 0 0x ไดผลดงภาพท 46
0 0 0 0 0.1 0x ไดผลดงภาพท 47 และ 0 0 0.1 0 0.1 0x ไดผลดงภาพท 48 พบวาจากการรกษาเสถยรภาพของระบบ สถานะตางๆของระบบสามารถลเขาสต าแหนงศนย หรอจดสมดลได ทง 3 ผลตอบสนอง โดย 0x มการการเคลอนทเขาสต าแหนงอางองอยางชาๆ สวนต าแหนงของลกตมเขาสจดสมดลไดรวดเรวทเวลาประมาณ 2 วนาท

61
ภาพท 46 ผลการจ าลองการรกษาเสถยรภาพของระบบควบคมโดยใชตวควบคม LQR คาต าแหนง
เรมตนท x3 = 0.1 เรเดยน)

62
ภาพท 47 ผลการจ าลองการรกษาเสถยรภาพของระบบควบคมโดยใชตวควบคม LQR คาต าแหนง
เรมตนท x5 = 0.1 เรเดยน)

63
ภาพท 48 ผลการจ าลองการรกษาเสถยรภาพของระบบควบคมโดยใชตวควบคม LQR คาต าแหนง
เรมตนท x3 = 0.1 เรเดยน, x5 = -0.1 เรเดยน)

64
ผลการทดลองจากระบบจรง ระบบลกตมหวกลบสองแกนเปนระบบทไมมเสถยรภาพทจดสมดลบนดงแสดงไดดงภาพท 49 เมอระบบไมมสญญาณกานลกตมจะแกวงไปยงจดสมดลลาง
ภาพท 49 ระบบเมอไมมการควบคม ภาพท 50 เปนการทดสอบการรกษาเสถยรภาพของระบบลกตมหวกลบสองแกนโดยการใชตวควบคมทไดจากการออกแบบดวยวธการคมคาก าลงสองเชงเสนเมอคาน าหนกทเลอก คอ Q1 และ R1 พบวาระบบสามารถรกษาต าแหนงของลกตมไดทระยะเวลาหนง อยางไรกตามต าแหนง

65
ของรถยงไมสามารถควบคมไดดนกเนองจากต าแหนงของรถเคลอนทเกนขอบเขตท monocarier จะสามารถรองรบได ท าใหไมสามารถรกษาต าแหนงของลกตมตอไปได (ชวงท monocarier สามารถท างานไดประมาณ ±25 เซนตเมตร) ภาพท 51 เปนระบบทใชคาหน าหนก Q1 และ R1 เชนเดยวกน และท าการเพมตวอนทกรลเขาไปในระบบ ซงจากภาพแสดงใหเหนวา ต าแหนงของรถสามารถเคลอนทเขาสต าแหนงอางองได แมวาจะมชวงการแกวงอยบาง แตกยงอยในชวงการท างานทระบบยงควบคมได ภาพท 52 เปนการควบคมเมอตวควบคมถกออกแบบโดยใชคาน าหนก Q2 และ R2 โดย ภาพท 53 แสดงระบบทไดท าการเพมตวอนทกรลและภาพท 54 แสดงการรบกวนระบบดวยการเคาะ ภาพท 55 เปนการควบคมเมอตวควบคมถกออกแบบโดยใชคาน าหนก Q3 และ R3 โดย ภาพท 56 แสดงระบบทไดท าการเพมตวอนทกรลและภาพท 57 แสดงการรบกวนระบบดวยการเคาะ และภาพท 58 เปนการควบคมเมอตวควบคมถกออกแบบโดยใชคาน าหนก Q4 และ R4 โดย ภาพท 59 ไดท าการเพมตวอนทกรล และภาพท 60 แสดงการรบกวนระบบดวยการเคาะ โดยการใช Q2 และ R2 กบ Q3 และ R3 มผลคอนขางใกลเคยงกน สวน Q4 และ R4 ใหการควบคมทใชสญญญาณควบคมลดลง ตารางท 6 คาน าหนกและอตราขยายทใชในการทดสอบการควบคม
คาน าหนก (Q, R) อตราขยาย
1 Q1 = diag([1,1,1,1,1,1]) R1 = 1
K = [1 0.79 -45.92 1.35 94.14 15.87]
2 Q2 = diag([1000,100,70000,500,100000,10]) R2 = 100
K = [3.16 3.14 -66.36 1.88 143.23 23.18]
3 Q3 = diag([1000,100,70000,100,50000,10]) R3 = 100
K = [3.16 2.93,-55.13,2.36,125.76,20.71]
4 Q4 = diag([1000,100,70000,100,50000,10]) R4 = 1000
K = [1.0 0.72 -42.44 1.51 89.93 15.16]

66
ภาพท 50 ผลตอบสนองตอคาเรมตนเมอระบบผลการจ าลองการรกษาเสถยรภาพของระบบควบคม
โดยใชตวควบคม LQR คาน าหนก Q1 และ R1

67
ภาพท 51 ผลตอบสนองตอคาเรมตนเมอระบบผลการจ าลองการรกษาเสถยรภาพของระบบควบคม
โดยใชตวควบคม LQR คาน าหนก Q1 และ R1 และมตวอนทกรล K1 = 0.5
68
ภาพท 52 ผลตอบสนองตอคาเรมตนเมอระบบผลการจ าลองการรกษาเสถยรภาพของระบบควบคม
โดยใชตวควบคม LQR คาน าหนก Q2 และ R2
69
ภาพท 53 ผลตอบสนองตอคาเรมตนเมอระบบผลการจ าลองการรกษาเสถยรภาพของระบบควบคม
โดยใชตวควบคม LQR คาน าหนก Q2 และ R2 และมตวอนทกรล K1 = 0.5

70
ภาพท 54 การรบกวนระบบทวนาทท 30 (theta1) และ วนาทท 40 (theta2) เมอระบบควบคมโดย
ใช ตวควบคม LQR คาน าหนก Q2 และ R2 และมตวอนทกรล K1 = 0.5

71
ภาพท 55 ผลตอบสนองตอคาเรมตนเมอระบบผลการจ าลองการรกษาเสถยรภาพของระบบควบคม
โดยใชตวควบคม LQR คาน าหนก Q3 และ R3
72
ภาพท 56 ผลตอบสนองตอคาเรมตนเมอระบบผลการจ าลองการรกษาเสถยรภาพของระบบควบคม
โดยใชตวควบคม LQR คาน าหนก Q3 และ R3 และมตวอนทกรล K1 = 0.5

73
ภาพท 57 การรบกวนระบบทวนาทท 30 (theta1) และ วนาทท 40 (theta2) เมอระบบควบคมโดย
ใช ตวควบคม LQR คาน าหนก Q3 และ R3 และมตวอนทกรล K1 = 0.5
74
ภาพท 58 ผลตอบสนองตอคาเรมตนเมอระบบผลการจ าลองการรกษาเสถยรภาพของระบบควบคม
โดยใชตวควบคม LQR คาน าหนก Q4 และ R4

75
ภาพท 59 ผลตอบสนองตอคาเรมตนเมอระบบผลการจ าลองการรกษาเสถยรภาพของระบบควบคม
โดยใชตวควบคม LQR คาน าหนก Q4 และ R4 และมตวอนทกรล K1 = 0.5
76
ภาพท 60 การรบกวนระบบทวนาทท 30 (theta1) และ วนาทท 40 (theta2) เมอระบบควบคมโดย
ใชตวควบคม LQR คาน าหนก Q4 และ R4 และมตวอนทกรล K1 = 0.5

77
วจารณ
1. สายไฟและสายสญญาณตางๆมผลตอระบบ ดงทไดจากการทดสอบหาคาคงทความเสยดทานของจดหมนทงสองของลกตม แมวาจะใชแบรรงจดหมนประเภทเดยวกนกตาม คาคงทความเสยดทานททดลองไดมคาตางกนคอนขางสง 2. การทจะรกษาสมดลของระบบลกตมไดหรอไมนน สวนหนงเกดจากการออกแบบทตวอปกรณการทดลองและขอจ ากดตางๆของอปกรณ เชนความฝดในตวมอเตอรและราง ซงทแรงดนสญญาณควบคมต าๆจะไมสามารถควบคมมอเตอรไดถกตองเนองจากแรงทเกดไมสามารถชนะคาความเสยดทานได 3. การตงกานลกตมใหอยในต าแหนงจดสมดลท าไดยาก มมทเปลยนไปเพยงเลกนอยมผลท าใหกานลกตมไมสมดล

78
สรปและขอเสนอแนะ
สรป การควบคมระบบลกตมหวกลบสองแกนเปนปญหาการควบคมทม 3 องศาอสระ การควบคมเอาทพตทเกยวเนองกนจงตองอาศยตวควบคมทแมนย า การเลอกสถานะของระบบ ความแมนย าของตวแปรตางๆ มผลอยางมากตอความส าเรจในการรกษาเสถยรภาพของระบบซงเปนระบบทไมมเสถยรภาพ การออกแบบดวยวธคมคาก าลงสองเชงเสน (LQR) เปนการออกแบบในโดเมนเวลา โดยท าการออกแบบเพอใหดชนสมรรถนะนอยทสด ซงดชนสมรรถนะอยในรปสมการของสถานะและอนพทโดยมคาน าหนก Q และ R เปนตวก าหนดลกษณะเปนไปของระบบ กรณเมทรกซ Q มคามากๆ คอการใหความส าคญคาผดพลาดของสถานะอางองและสถานะเอาทพท ซงผลคอจะท าใหระบบตอบสนองไดดและรวดเรว สวนในกรณเมทรกซ R มคามากคอการใหความส าคญในสวนของพลงงานทใชในการควบคม จากการทดลองคา Q4 และ R4 ใหผลการทดลองเปนทนาพอใจเนองจากใชพลงงานของสญญาณควบคมต า และสามารถทนตอสงรบกวนได ซงกรณทใชสญญาณควบคมมากๆ แมวาจะทนตอสงรบกวนไดดกวา แตกจะมโอกาสสงทสญญาณควบคมจะเกนคาขอบเขตทอปกรณจะรบได ท าใหการควบคมผดพลาดจนไมสามารถรกษาต าแหนงได สวนการเพมตวอนทกรลทเหมาะสมเขาไประบบชวยใหการควบคมต าแหนงสามารถลเขาสต าแหนงทตองการไดรวดเรวมากยงขนดงแสดงไดชดเจนในสวนการทดลองเมอใหคาน าหนกคอ Q1 และ R1 แตหากอนทกรลมคามากเกนไปกจะสงผลใหระบบไมมเสถยรภาพได

79
ขอเสนอแนะ
1. ระบบลกตมหวกลบสองแกนเปนระบบทมองศาอสระมากกวาหนง ท าใหเปนระบบทควบคมไดยาก และมขอจ ากดสงการจะควบคมระบบใหมประสทธภาพนนจ าเปนตองอาศยอปกรณตวควบคมทมก าลงสง เชนการใชแบตเตอรทมความสามารถในการจายกระแสไฟฟาแทน หรอ การเลอกใชมอเตอรหรออปกรณสงก าลงทมก าลงมากขน 2. ระบบลกตมหวกลบทท าการทดลองนพบวาความเสยดทานตางๆมผลกระทบตอการควบคมคอนขางสง การออกแบบตวควบคมทสามารถแกไขขอจ ากดเรองแรงเสยดทานนาจะท าใหระบบสามารถควบคมไดอยางมประสทธภาพขนได

80
เอกสารและสงอางอง
ชต เหลาวฒนา, ฐตศกด จนทรพรหม และ ไพศาล สวรรณเทพ. 2545. การวเคราะหโครงสรางทางกลและเสถยรภาพของหยนตเดนสองขา. วารสารวจยและพฒนา มจธ. 25 (1): 35-54.
เดวด บรรเจดพงศชย. 2551. ระบบควบคมพลวต : การวเคราะหการออกแบบ และการประยกต. พมพครงท 1 ส านกพมพแหงจฬาลงกรณมหาวทยาลย, กรงเทพฯ.
วบลย แสงวระพนธศร. 2548. การควบคมระบบพลศาสตร. พมพครงท 2 ส านกพมพแหง
จฬาลงกรณมหาวทยาลย, กรงเทพฯ. Kajita, S., F. Kanehiro, K. Kaneko, K. Fujiwara, K. Yokoi and H. Hirukawa. 2001. The 3D
linear inverted pendulum mode: a simple modeling for a biped walking pattern generation, pp. 239-246. In Proceedings of the 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems. 29 October-3 November 2001, Outrigger Wailea Resort, Maui, Hawaii, USA.
Sultan, K. 2003. Inverted Pendulum: Analysis, Design and Implementation. Available
Source: http://www.mathworks.com/matlabcentral/fileexchange/3790-inverted-pendulum, February 10, 2010.
Honda Motor Co., Ltd. 2009. Honda Develops New Personal Mobility Device With the Goal
of Co-existing in Harmony with People -- World's first drive system that enables movement in all directions. Available source: http://world.honda.com/news/2009/c090924New-Personal-Mobility-Device, February 10, 2010.
Naidu, D. S. 2003. Optimal Control Systems. CRC Press LLC, Boca Raton, Florida, USA. Ogata, K. 2002. Modern Control Engineering. 4th ed. Prentice Hall, Upper Saddle River,
New Jersey, USA.

81
Thomson, W. T. and M. D. Dahleh. 1998. Theory of Vibration with Applications 5th ed.
Prentice Hall, Upper Saddle River, New Jersey, USA. Wane, S. O., H. Yu and Y. Liu. 2007. Development of a reaction drive for a propulsion
mechanism. IEEE International Conference on Networking, Sensing and Control, 15-17 April 2007, London, UK.

82
ภาคผนวก

83
การหาสมการการเคลอนทของระบบลกตมหวกลบสองแกน
จากสมการ Lagrange Equation
1,2,...,i
i i i
d T T UQ i n
dt q q q
เมอ
T แทนพลงงานจลนของระบบ U แทนพลงงานศกยของระบบ Q แทนแรงภายนอกทกระท าตอระบบ
iq แทน generalize coordinate
xc
1
y2
ภาพผนวกท 1 free body diagram ของระบบลกตมหวกลบสองแกน

84
พกดตางๆก าหนดไดดงน พกดต าแหนงของรถ คอ
0 0,x y
พกดของลกตมลาง คอ
1 1 0 1 1 1 1
1 1 0 1 1 1 1 1 1
, sin , cos
, cos , sin
x y x l l
x y x l l
พกดของลกตมบน คอ
2 2 0 1 1 2 2 1 1 2 2
2 2 0 1 1 1 2 2 2 1 1 1 2 2 2
, sin sin , cos cos
, cos cos , sin sin
x y x L l L l
x y x L l L l
2 22
0 0 1 0 1 1 1 1 1 1
2 2
2 0 1 1 1 2 2 2 1 1 1 2 2 2
2 2
1 1 2 2
2 2 2 2 2 2 2 2
0 0 1 0 1 1 1 1 1 0 1 1 1 1
2 0
1 1cos sin
2 2
1cos cos sin sin
2
1 1
2 2
1 1cos ( ) 2 cos sin
2 2
1(
2
T m x m x l l
m x L l L l
J J
m x m x l l x l
m x
2 2 2 2 2 2 2
1 1 1 2 2 2 1 1 0 1 2 2 0 2
2 2 2 2 2 2
1 2 1 2 1 2 1 1 1 2 2 2
2 2
1 2 1 2 1 2 1 1 2 2
2 2 2 2
0 0 1 0 1 1 1 1 0 1
2
cos ( ) cos 2 cos 2 cos
2 cos cos sin sin
1 12 sin sin )
2 2
1 12 cos
2 2
1(
2
L l L x l x
L l L l
L l J J
m x m x l l x
m
2 2 2 2 2
0 1 1 2 2 1 1 0 1 2 2 0 2
1 2 1 2 1 2 1 2 1 2 1 2
2 2
1 1 2 2
2 cos 2 cos
2 cos cos 2 sin sin )
1 1
2 2
x L l L x l x
L l L l
J J

85
2 2 2 2 2 2
0 1 2 0 1 1 2 1 1 1 2 2 2 2
1 1 1 0 1 2 1 1 0 1 2 2 2 0 2
2 1 2 1 2 1 2
1 1 1
2 2 2
cos cos cos
cos
T m m m x m l m L J m l J
m l x m L x m l x
m L l
1 1 1 2 1 1 2 2( cos ) cos cosU m g l m g L l
1 01,i q x (พกดรถ)
1
0 0 0
d T T UQ
dt x x x
0 1 2 0 1 1 1 1 2 1 1 1 2 2 2 2
0
2
0 1 2 0 1 1 1 1 1 1 1 1 2 1 1 1
0
2 2
2 1 1 1 2 2 2 2 2 2 2 2
0
0
1 0 0
cos cos cos
cos sin cos
sin cos sin
0
0
Tm m m x m l m L m l
x
d Tm m m x m l m l m L
dt x
m L m l m l
T
x
U
x
Q F c x

86
1 12,i q (พกดลกตมลาง)
2
1 1 1
2 2
1 1 2 1 1 1 1 1 1 0 2 1 1 0 2 1 2 1 2 2
1
2 2
1 1 2 1 1 1 1 1 1 0 1 1 1 0 1 2 1 1 0
1
2 1 1 0 1 2 1 2
cos cos cos
cos sin cos
sin c
d T T UQ
dt
Tm l m L J m l x m L x m L l
d Tm l m L J m l x m l x m L x
dt
m L x m L l
1 2 2 2 1 2 1 2 2 1 2
1 1 1 0 1 2 1 1 0 1 2 1 2 1 2 1 2
1
1 1 1 2 1 1
1
1 1 2 1 1
2 1 1
os sin ( )
sin sin cos
( sin ) sin
( ) sin
m L l
Tm l x m L x m L l
Um g l m g L
m l m L g
Q c
3 23,i q (พกดลกตมบน)
3
2 2 2
2
2 2 2 2 2 2 2 0 2 1 2 1 2 1
2
2
2 2 2 2 2 2 2 0 2 2 2 0 2
2
2 1 2 1 2 1 2 1 2 1 2 1 1 2
2 1 2 1
2
cos cos
cos sin
cos sin
sin
d T T UQ
dt
Tm l J m l x m L l
d Tm l J m l x m l x
dt
m L l m L l
Tm L l
2 1 2
2 2 2
2
3 2 2
sinU
m gl
Q c

87
2
0 1 2 0 1 1 1 1 1 1 1 1 2 1 1 1
2 2
2 1 1 1 2 2 2 2 2 2 2 2
0 0
2 2
1 1 2 1 1 1 1 1 1 0 1 1 1 0 1 2 1 1 0
2 1 1 0 1 2 1 2 1 2
cos sin cos
sin cos sin
cos sin cos
sin cos
m m m x m l m l m L
m L m l m l
F c x
m l m L J m l x m l x m L x
m L x m L l
2 2 1 2 1 2 2 1 2
1 1 1 0 1 2 1 1 0 1 2 1 2 1 2 1 2
1 1 2 1 1
1 1
2
2 2 2 2 2 2 2 0 2 2 2 0 2
2 1 2 1 2 1 2 1 2 1 2 1 1 2
2 1
sin ( )
sin sin cos
( ) sin
cos sin
cos sin
m L l
m l x m L x m L l
m l m L g
c
m l J m l x m l x
m L l m L l
m L l
2 1 2 1 2
2 2 2
2 2
sin
sinm gl
c
0 1 2 0 1 1 2 1 1 1 2 2 2 2
2 2
1 1 2 1 1 1 2 2 2 2
0 0
2 2
1 1 2 1 1 0 1 1 2 1 1 1 2 1 2 1 2 2
1 1 2 1 1 0 1 2 1 2 1 2 2 1 2
1 1
cos cos
sin sin
cos cos
sin sin ( )
sin
m m m x m l m L m l
m l m L m l
F c x
m l m L x m l m L J m L l
m l m L x m L l
m l
1 0 1 2 1 1 0 1 2 1 2 1 2 1 2
1 1 2 1 1
1 1
2
2 2 2 2 2 2 2 0 2 2 2 0 2
2 1 2 1 2 1 2 1 2 1 2 1 1 2
2 1 2 1 2 1 2
2 2 2
2 2
sin cos
( ) sin
cos sin
cos sin
sin
sin
x m L x m L l
m l m L g
c
m l J m l x m l x
m L l m L l
m L l
m gl
c

88
ส าหรบ 1 2, มคานอยๆ จะได
1 2
1 2
2 2
1 2 0 1 0 2 1 2 1 2
sin , sin ,
cos ,cos 1,
, , , , , 0x x
ดงนนสมการการเคลอนทเชงเสนทไดคอ
0 1 2 0 1 1 2 1 1 2 2 2 0 0
2 2
1 1 2 1 0 1 1 2 1 1 1 2 1 2 2 1 1 1 1 2 1 1
2
2 2 0 2 1 2 1 2 2 2 2 2 2 2 2 2
( )
m m m x m l m L m l F c x
m l m L x m l m L J m L l c m l m L g
m l x m L l m l J c m gl
จดใหอยในรปของเมทรกซ
0 1 2 1 1 2 1 2 2 0 0 0
2 2
1 1 2 1 1 1 2 1 1 2 1 2 1 1 1 1 1 2 1 1
2
2 2 2 1 2 2 2 2 2 2 2 2 2 2
( )
m m m m l m L m l x F c x
m l m L m l m L J m L l c m l m L g
m l m L l m l J c m gl
แทนคาตวแปร F
0 1 2 1 1 2 1 2 2 0 2 3 1 0 0 0
2 2
1 1 2 1 1 1 2 1 1 2 1 2 1 1 1 1 1 2 1 1
2
2 2 2 1 2 2 2 2 2 2 2 2 2 2
( )
m m m m l m L m l x k v k k x c x
m l m L m l m L J m L l c m l m L g
m l m L l m l J c m gl
แทนคาพารามเตอรตางๆจากตารางท 1
1 1 1
2 2 2
1.6 0.1350 0.0900 28.3873 185.1620
0.1350 0.0372 0.0270 0.0011 1.3244
0.0900 0.0270 0.0387 0.0004 0.8829
x v x
เขยนในรปปรภมสถานะโดยก าหนดตวแปรสถานะดงน

89
1 1
2 2
3 3
4 4
5 5
6 6
0 1 0 0 0 0
0 167.4207 4.7217 0.0039 0.3396 0.0002
0 0 0 1 0 0
0 660.1577 90.9395 0.0755 34.9756 0.0158
0 0 0 0 0 1
0 71.2247 52.4634 0.0436 46.4257 0.0210
x x
x x
x x
x x
x x
x x
0
52.2389
0
205.9837
0
22.2237
v
1 2
3 1 4 1
5 2 6 2
x x x x
x x
x x

90
ประวตการศกษา และการท างาน ชอ นายฐกด เบญจเลศยานนท เกดวนท 19 กมภาพนธ 2527 สถานทเกด อ าเภอเมอง จงหวดภเกต ประวตการศกษา วศ.บ. (วศวกรรมเครองกล) มหาวทยาลยเกษตรศาสตร ต าแหนงปจจบน - สถานทท างานปจจบน - ผลงานดเดนและ/หรอรางวลทางวชาการ - ทนการศกษาทไดรบ -





























