-
7/28/2019 AKS Dif Jed Dekompozicija
1/10
16 linear systems
1.4 T I M E - D O M A I N S O L U T I O N O F L I N E A R D I F
F E R E N T I A LE Q U A T I O N S
A n ordinary linear differential equation wi t h constant
coefficients ischaracteristic of linear lumped time-invariant
systems. In this section, wereview briefly the theory of solving
this class of differential equations. Werestrict our discussion
here to single input-output systems. The m u l t i d i mensional
case is the subject of Chapter 3. Suppose the differential
equationis of order n
dnv(t) d^vit)K~dT + K~x + "' + b y { t ) = x ( t ) ( L 2 1 )
It is convenient to write (1.21) in operational form as
(* fm + bn_, ^ + - ' + b0)[y]= x{t) (1.22)o r more briefly
as
L[y] = x(t) (1.23)where L is the operator
dn dn~xL = bn+ &n_! ^- + + b0 (1.24)dtn dtn~xIt is easy to
verify that L is a linear operator, that is
L\C\y\ + c 22/ 2] = c\ L[Vi\ + c2 L[y2]Thus, if yx{t) and y2(t)
are solutions to L[y] 0, then so also is c-^y^t)+c2y2(t) a solution
to L[y] = 0.
T he solution to (1.21) is made up of two components: (1) the
source-free(transient, natural , complementary, homogeneous)
solution, and (2) thecomponent resulting from the source (forced,
steady-state, nonhomogeneous,particular solution). The transient
solution yc(t) is found from the homogeneous equation corresponding
to (1.21). That is, yc(t) must satisfy
L[yc(t)) = 0 (1.25)F o r the special case of constant
coefficients, the solution to (1.25) has
been completely solved.2
In this case, the solution has a general formVc (t) = cVl{t) +
c2y2(t) + + cnyn{t) (1.26)
2 Wylie, C. R. , Advanced Engineering Mathematics, McGraw-Hill,
New York, 1966.
-
7/28/2019 AKS Dif Jed Dekompozicija
2/10
1.4 Time-Domain Solution of Linear Differential Equations 17The
functions yi(t),y2(t), . , depend on the roots of the
associatedcharacteristic equation,
f(r) = bnr + bn_xr^ + + b0 = 0 (1.27)where bn, . . . , bQ are
the same coefficients as in (1.24). If (1.27) has n distinctroots
rlt r2, . . . , rn, the functions yt(t), i = 1, 2 , . . . , n are y
t(t) = eTit andthe transient or complementary solution is
yc(t) = cer + c2er* + + cne r^ (1.28)I Spending on the
multiplicity of the roots in (1.27), the functions yt(t) takeon
various forms. We summarize the results below. After finding the n
rootso f (he characteristic equation (1.27), assign the y(0> i =
1,2, . . . ,n asfollows:
(1) fo r each real root r, the function ert(2) for each real roo
t r of multiplicity k, the functions e rt, tet,... , tk~xet(3) for
each simple complex pair of roots a jb, the functions cos bt
; i n d e a i sin(4) fo r each complex pair of roots a y7> of
multiplicity k, the functions
-
7/28/2019 AKS Dif Jed Dekompozicija
3/10
18 Linear SystemsTherefore the left-hand side of (1.29) is zero
and ye(t) o f (1.28) is asolution to the homogeneous equation
(1.25).E X A M P L E 1.11. Consider the differential equation
A ( 0 _ A ( 0 M O _ y ( t ) = oThe characteristic equation
is
f(r) = r 3 - r 2 + r - l = 0which has roots j, j, and 1. The
homogeneous solution function istherefore
yc{t) = cef + c2e~ ji + c3e jt= + c 2 cos t c2j sin t + c 3 cos
t + c 3j" sin f= cxe f + c 2 cos t + C g sin f
We c a l l yc(t) a solution function if the constants c i ? i =
1, 2 , . . . , n arenot specified.
The solution resulting from the forced response is somewhat more
involved.There are several methods used i n obtaining yv(t)
including educatedguessing. The method o f undetermined
coefficients can be used i f thederivatives of x(t) result in a
finite number of independent functions. W eoutline the method o f
undetermined coefficients briefly.
Let D = djdt so that the operator L can be writtenL = bnD +
bn_xD + + b0 (1.30)
i.e., as a polynomial operator in the operator D. We wish to f i
n d an operatorwhich "annihilates" x{t). That is , given x(t), we
wish to f i n d an operatorL A such that
LJx{t)] = 0 (1.31]Such an operator can always be found i f x{t)
is a solution o f a homogeneousequation with constant coefficients.
F o r example, i f x(t) = eai, then theannihilator operator is LA =
D a. I f x(t) = A cos bt + B sin bt, therthe annihilator operator
is LA = D2 + b2. Fo r a sum of such terms, theannihilator operator
is the product of the operators fo r each term in the sum
Once the annihilator operator has been found, applying it to
both sides o:the original nonhomogeneous equation results i n a
homogeneous equationThat is , suppose LA is the annihilator fo r
x(t) and we wish to solve
L[y(t)] = x(t) (1.32Then
LA{L[y{t)}} = LA[x(t)] = 0 (1.33
-
7/28/2019 AKS Dif Jed Dekompozicija
4/10
1.4 Time-Domain Solution of Linear Differential Equations 19W e
can solve (1.33) by the method outline d previously. The solution
functionis
V(t) = c#x{t) + + cnyn{t) + cPiy9l(t) + + c9#9r(t).The first n
solution functions satisfy L[y(t)] = 0. Therefore, i f we
substitute;/(/) into (1.32), these terms w i l l sum to zero on the
left-hand side. The onlylerms left w i l l be cViyVi(t) + +
cVryPr{t) which arise from the forcingfunction. I f we now equate
coefficients of l i k e functions on both sides of theequation, we
can evaluate the constants cp , . . . , cVr, and thus obtain
theforced solution. The following examples demonstrate these
ideas.
E X A M P L E 1.12. Consider the differential equationL[y(t)] =
(D2 + \)[y(t)] = e*
I n this case, the annihilator fo r e* is {D 1) because {D l)[e
f] = 0.Thus we operate on both sides by (D 1) an d obtain the
homogeneousequation
C D - i ) ( 2 + i)bf(0] = oW e can solve this equation by means
of the characteristic equation
(r - l ) ( r 2 + 1) = 0This equation has roots j. Thus, the
solution function is
y(t) = cx co s t + c2 sin t + czelI f we now substitute this
solution function into the original equation,the first two terms
are zero because they are solutions to L[y] = 0. Weobtain on e
equation for c 3 , the undetermined coefficient,
( D 2 + l)[cx cos t + c2 sin / + czex\ = elThus
0 + (D2 + l)[c3el] = elcze* + c3e* = e*
or2c3e* = e1
Hence, c3 = 1/2, an d so cvyv(t) = e1]!.E X A M P L E 1.13.
Consider the differential equation
L[y(t)}= {D*+ l)[y(t)] = sin?I n this problem, the annihilator
is (D2 + 1). Thus, the homogeneousequation we wish to solve is
(D + \)(D2 + \)[y(t)\ = 0
-
7/28/2019 AKS Dif Jed Dekompozicija
5/10
20 Linear SystemsTh e corresponding characteristic equation
is
(r 2 + 1)(Y2 + 1) = 0which has roots j , j each of multiplicity
two. Thus, the solutiofunction is
y(t) = a cos t + c2 sin t + czt cos / + c 4 / sin tSubstituting
this solution function into the original equation, we ha>
(D + l)[c x cos t + c 2 sin / + c 3/ cos / + c 4f sin /] = sin
tPerforming the indicated differentiation and equating coefficients
of l i lfunctions on both sides of the equation, we f i n d that c
4 = 0 and c3 * \. Hence, cvyv{t) = \t cos t. If the i n i t i a l
conditions are y(0) =and y'(0) = 0, we can solve for cx and c2
using our knowledge of tlforced solution. We have
2/(0 = ci c o s t + c 2 sin 1A n d so2/(0) = 1 = c x
J/'(0) = 0 = c2 -Thus, we know that
cx= 1c 2 2
and the complete solution isy(t) cos / + i sin t -
Transient and Steady-State ComponentsA t this point, it is
useful to view the mathematical solution for (1.21)
terms of the system and the input stimulus x(t). We have
decomposed ttotal response of the system y(t) into two components.
The source-freetransient solutio n is obtained for a zero input
stimulus . Hence, it deperionly on the character of the system and
not on any external signals. Becaithis response occurs for x(t) =
0, it is also known as the natural respoio f the system. The terms
source-free, transient, natural, homogeneous, acomplementary are a
ll used to describe this response that results only fnthe character
of the system. The term cos t + \ si n t in Example 1.13 isexample
of a transient solution.
In contras t, the forced solu tion is characterist ic of bo th
the system athe input stimulus. If we change either the system or
the input, we change iforced response. The forced response is also
known as the steady-stresponse because this response is a driven
response and can exist after
\t cos t
it COS t
-
7/28/2019 AKS Dif Jed Dekompozicija
6/10
1.5 Initial Energy Storage in Linear Systems 21imnsienl response
has died away. The terms steady-state, forced, driven,uotnponent
resu lting fro m the source, nonhomoge neous , and par tic ula r
aren il used to describe this response. The term \t cos t in Exampl
e 1.13 is anexample of a forced solution.
To summarize: The transient response is characteristic of the
system and isobiniiied by solving the homogeneous differential
equati on that models the*ynlem; the steady-state response depends
on both the system and the natureo l I he input stimulus. It is the
output response that is forced up on the systemby the input
stimulus and must be found by solv ing the nonhomogene ousi l l l l
c i e n t i a l equation.
1.5 I N I T I A L E N E R G Y S T O R A G E I N L I N E A R S Y
S T E M SThere is another decomposition of the total response that
is sometimes
Ui o f u l in linear systems analysis. This decomposit ion
involves separating theiespouse resulting from the i n i t i a l
energy storage and the response resultingfrom the system input. B y
separat ing the i n i t i a l energy storage from theremaining
system response, we often ob tai n a simpler way of han dli ng
andinterpreting i n i t i a l energy storage in a system.
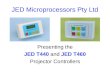
The decomposition shown in Figure 1.10 allows us to resolve the
problemWe encountered in Exampl es 1.1 and 1.6, where a seemingly
linear systemwas describ ed by an inpu t-ou tput rel ati on whi ch
di d not satisfy the superposition property and hence was not
linear. In the decomposition shown in
x(t) H
A system with initial energy storage
x(t).
(a)
H
System with no initial energy storage
tit) 0-tern andange thedy-state
after the M G U R E 1.10
H
System with the initial energy storage(b)
-
7/28/2019 AKS Dif Jed Dekompozicija
7/10
22 Linear SystemsFigure 1.10, each of the systems labeled H is
identical to the given system inthe top of the figure. We write the
system output y2(t) as the sum of yd(t), theoutput of an initially
relaxed system driven by the input x{t), plus yh(t), theoutput of
an unforced system with i n i t i a l conditions identical to those
of ourgiven system. Then we have
y 2(0 = yd(t) + yh(0whereL[yd(t)} = x(t)
VJLO) = Vffl = = y j ^ (0 ) = 0an d L[yh(t)] = 0
K ( 0 ) = | f i ( 0 ) , y&0) = yl(0), . . . , y^XO) = ^ - "
( O ) .Here yx{0), y'i(0), . . . , 2 / i _ 1 ( 0 ) are the given i
n i t i a l conditions for our system.T o demonstrate that y2(t) of
the decomposed system equals yx(t) of theoriginal system, we note
that the two functions satisfy the same differentialequation
L\y2(t)] = L[yh(t) + yd(t)] = x(t)L[yx{t)\ = x(t)
an d that they have the* same i n i t i a l conditionsy2(0) =
yh(0) + yd(0) = yx(0)2/2(0) = y'M + y'd{Q>) = y[(0)
2/ 2 - 1 ) (0) = 2/i w~ 1) (0) 4- ydn-1](0) = y{rl)(0)It follows
that yx(t) = y2{t) for all t > 0, because the solution to an
thorder differential equation with n i n i t i a l conditions is
unique.
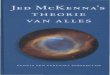
E X A M P L E 1.14. The system of Example 1.1, described by
thealgebraic equation
y(t) = ax{t) + bc a n be decomposed as shown in Figure 1.11.
Here the output resultingfrom the input is yd{t) = ax(t) (note that
this relation represents a linearsystem), and yh(t) = b is the
output of the original system with x{t) 0.E X A M P L E 1.15.
Consider the RC network o f Exampl e 1.6 shown inFigure 1.12 and
describ ed by the equat ion
e(t) = Ri(t) + - f Kt') dt'
-
7/28/2019 AKS Dif Jed Dekompozicija
8/10
1.5 Initial Energy Storage in Linear Systems 23
x(t)- H(-) = a(-)+b ~>~y(t) = ax(t) + b
(a )
x(t)- a(>) a x(t)
@ ^y(0+
(b)
IIGURE 1.11
where i(t) is the system input and e(t) the system output. In
our systemdecomposition, we set yd(t) equal to the output of the
same system, butwilli no energy storage at t = 0. Thus
yd(t) - Ri(t) + 1 I rffC JoThe term equals the output of the
original system with zero input,but with the given i n i t i a l
condition e(0) = v0.
Vh(t) = voThus we have
-
7/28/2019 AKS Dif Jed Dekompozicija
9/10
24 Linear Systemsas before. B y decompo sin g our system in this
manne r, we can ncapply superposition to the linear partthat is,
the x(t) yd(t) relationand then add the term yh(t) to obtain the
entire output.E X A M P L E 1.16. Con sider the system of Exa mpl e
1.13 descr ibedthe differential equation
(D*+ \)\y(t)] = x(t)with the i n i t i a l conditions
y(0) 1 y'(0 ) = 0The term yh{t) in the system deco mpos it ion
is independent of 1input x(t). To f i n d this term, we need only
solve the homogenecdifferential equation
(D* + 1)[*/,(>)] = 0with i n i t i a l conditions
yh(0) = 1, y;(0) = 0Solving this equation, we have
yh(t) = c cos / + c 2 sin /where
yh(0) = 1 gives c = 1^( 0) = 0 gives c2 = 0
Thus yh{t) = cos t, and we can sketch the equivalent system
asFigure 1.13. To f i n d yd{t), we must solve the nonhomogeneous
equat
C D * + l)fefc(0] = x ( t )with x{t) = sin t and zero i n i t i
a l condit ions. As before, we ob tain
X(t) H
Zero initial conditions
*y(t)M +
cos t
F IGURE 1.13
-
7/28/2019 AKS Dif Jed Dekompozicija
10/10
1.6 Linear Difference Equationsand substituting in the o r i g i
n a l differential equation, we f i n d
Coc 4 = 0
as before. A p p l y i n g the i n i t i a l conditionsyM =
oyffl = o
we f i n d thatc x = 0Co = 1/2
Thus2/d = = K s m ' ' c o s 0
Summing the terms and yd(t), we f i n d the solutiony(t) = yh(t)
+ yd(t)
= cos / + J(si n / / cos /)as before.