-
8/17/2019 Alvarez Toala Ecuaciones en Diferencias
1/22
UNIVERSIDAD DE LAS FUERZAS
ARMADAS ESPE
DEPARTAMENTO DE CIENCIAS
EXACTAS
ECUACIONES EN DIFERENCIAS
DOCENTE
Dr. MARCELO ROMAN
INTEGRATES
ALVAREZ FREDYTOALA RAFAEL
Latacunga 2016
-
8/17/2019 Alvarez Toala Ecuaciones en Diferencias
2/22
Contents
1 Ecuaciones en Diferencias 1
1.1 Antecedentes . . . . . . . . . . . . . . . . . . . .
. . . . . . . 11.2 Ecuaciones en diferencias . . . . . . . .
. . . . . . . . . . . . . 2
1.2.1 Ejemplo 1 . . . . . . . . . . . . . . . . . . . . .
. . . . 31.2.2 Ejemplo 2 . . . . . . . . . . . . . . . . . .
. . . . . . . 3
1.3 Ecuaciones lineales de primer orden . . . . . . . . .
. . . . . . 41.3.1 Ejemplo 1 . . . . . . . . . . . . . . . .
. . . . . . . . . 5
1.4 Ecuaciones lineales de segundo orden . . . . . . . .
. . . . . . 61.4.1 Teorema de existencia . . . . . . . . . .
. . . . . . . . 61.4.2 Solución de ecuaciones en diferencias
. . . . . . . . . . 7
1.5 Sistemas discretos en Simulink . . . . . . . . . . . .
. . . . . . 9
1.6 Ejercicio . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 111.7 Funciones Z de Transferencia . . . . .
. . . . . . . . . . . . . 14
Bibliograf́ıa 19
i
-
8/17/2019 Alvarez Toala Ecuaciones en Diferencias
3/22
List of Figures
1.1 Representación esquemática de un sistema . . . . .
. . . . . . 21.2 Sistema de procesamiento de señales en el tiempo
. . . . . . . 4
1.3 Sistema de ejemplo . . . . . . . . . . . . . . . . .
. . . . . . . 71.4 Parámetros de bloque . . . . . . . . . . .
. . . . . . . . . . . . 101.5 Parámetros de bloque . . . . .
. . . . . . . . . . . . . . . . . . 111.6 Diagrama de un sistema
discreto de fundición . . . . . . . . . 111.7 Diagrama de
bloques . . . . . . . . . . . . . . . . . . . . . . . 121.8
Esquema del sistema en Simulink . . . . . . . . . . . . . .
. . 121.9 Sistema con suministro de 20 toneladas y 0 piezas pedidas
. . 131.10 Sistema con suministro de 50 piezas pedidas
. . . . . . . . . . 141.11 Diagrama de bloques . . .
. . . . . . . . . . . . . . . . . . . . 161.12 Diagrama de bloques
. . . . . . . . . . . . . . . . . . . . . . . 17
1.13 Diagrama de bloque . . . . . . . . . . . . . . . . .
. . . . . . 18
ii
-
8/17/2019 Alvarez Toala Ecuaciones en Diferencias
4/22
Chapter 1
Ecuaciones en Diferencias
1.1 Antecedentes
En el capı́tulo número dos del libro Matemáticas Avanzadas
para Ingenieŕıa- 2da Edición de Glyn James se estudió sobre la
transformada de Laplacecomo un método para resolver ecuaciones
diferenciales y a la vez como unamanera de caracterizar un sistema
de tiempo continuo. Los métodos dela transformada de Laplace
tienen un papel fundamental en el enfoque delanálisis y diseño en
los sistemas de ingenieŕıa. El pionero en el desarrollo de
estos métodos fue el ingeniero eléctrico inglés Oliver
Heavisede que desarrllóun método para la solución sistemática
de ecuaciones diferenciales ordinariascon coeficientes
constantes.
Heaviside estuvo interesado en la resolución de problemas
prácticos y sumétodo fue basado en la intuición sin rigor
matemático. Usando sus ideas,otros matemáticos se encargaron de
justificarlas, como es el caso del matemáticofrancés Pierre Simon
de Laplace, quien finalmente desarrolló una transfor-mación
integral conocida como el método de la transformada de
Laplace.
La transformada de Laplace es una clase de transformacíon
integral que tomauna función f(t) de una variable t a la que nos
referimos como tiempo enuna función F(s) de otra variable s
llamada frecuencia. La transformada deLaplace encuentra una
aplicación particular en el campo de las señales y elanálisis de
sistemas lineales.
Una caracteŕıstica sobresaliente en un sistema es que cuando
existe una ex-citación de entrada u(t), produce una respuesta de
salida x(t). Donde u(t) yx(t) son funciones de una sola variable t
que representa al tiempo, normal-
1
-
8/17/2019 Alvarez Toala Ecuaciones en Diferencias
5/22
mente referidas como señales. En la práctica, la señal de
entrada u(t) puede
ser una función discontinua, periódica o un impulso.
Esquemáticamente un sistema puede ser representado como se
muestra en lasiguiente figura.
Figure 1.1: Representación esquemática de un sistema
Si el sistema es lineal e invariante en el tiempo, entonces la
salida estárelacionada con la entrada por una ecuación
diferencial lineal con coeficientesconstantes y tenemos un problema
de valor inicial estándar que se puede re-solver mediante la
transformada de Laplace.
Los sistemas se dividen en sistemas de tiempo continuos y
sistema de tiempo
discreto, los sistemas de tiempo continuo son modelados por una
ecuacióndiferencial. las señales de entrada y salida pueden
variar en cualquier instantede tiempo, las cuales son funciones de
una variable continua de tiempo y ala vez usando la transformada de
Laplace.
En cambio, un sistema de tiempo discreto está modelado por una
ecuaciónen diferencias en lugar de una ecuación diferencial y
está tratado con el usode la transformada z.
1.2 Ecuaciones en diferencias
Una ecuación en diferencias es una expresión de la forma:
F (yt+n, yt+n−1, yt+n−2,...,yt+1, yt, t) = 0 (1.1)
Una solución de la misma, es toda sucesión que la cumpla; el
conjunto de to-das las soluciones recibe el nombre de solución
general.Esta solución generalpresenta cierto número de
parámetros, que pueden determinarse a partir delas condiciones
iniciales, dando lugar a las diferentes soluciones
particulares.
2
-
8/17/2019 Alvarez Toala Ecuaciones en Diferencias
6/22
El orden de una ecuación en diferencias se obtiene mediante la
diferenciaentre el mayor y el menor de los ı́ndices que afectan a
y.
Por ejemplo, la expresión −2yt+3 + 3yt =
t + 1, es una ecuación en difer-encias de orden
t + 3 − t = 3, es decir de tercer
orden.
La ecuación en diferencias yt+1 − yt =
2 es de orden t + 1 − t = 1,
esdecir de primer orden. y riene por solución general a todas las
progresionesaritméticas de razón 2, es decir:
yt =
y(
t) = 2
t +
C
siendo C una constante cualquiera. Una solución particular, es
la progresiónaritmética:
1, 3, 5, 6, ..., 2t+1,...
1.2.1 Ejemplo 1
Supongamos que una población de insectos crece el triple, en
cada peŕıodode tiempo que transcurre entre dos medidas, de lo que
creci ó en el perı́odoinmediatamente anterior. Construir el
modelo.
Si llamamos yt al número de individuos en el
instante t; del enunciado delejemplo se deduce:
yt+2 − yt+1 = 3(yt+1 − yt), t = 0,
1, 2, 3, ...
simplificando obtenemos:
yt+2 − 4yt+1 + 3yt = 0
que es una ecuación en diferencias de segundo orden. Si por
ejemplo, cono-cemos el número inicial de insectos, y0
= y(0) = 100, podemos sustituir y
obtendŕıamos:yt+2 − 4yt+1 + 300 = 0
lo cual nos indica que debemos saber otra medida, por ejemplo
y1, parapoder encontrar el resto de los valores.
1.2.2 Ejemplo 2
A continuación se presenta un sistema de procesamiento de
señales en tiempodiscreto mediante un diagrama de bloques, en el
que se puede observar un
3
-
8/17/2019 Alvarez Toala Ecuaciones en Diferencias
7/22
ćırculo que representa un sumador S, un bloque D que representa
el retardo
unitario del sistema, una ganancia alfa de
retroalimentación.
Figure 1.2: Sistema de procesamiento de señales en el
tiempo
xk representa una sucesión de observaciones en el paso de
tiempo k queingresan al sistema como una entrada para ser filtrada
usando el sistema deretroalimentación de tiempo discreto mostrado
en la figura, después de ingre-sar xk se mezcla con la
señal retroalimentada gracias a la acción del bloquesumador S,
generándose una señal rk que ingresa al bloque de
retardo uni-tario D que mantiene la señal de entrada hasta que el
reloj avance un paso,es decir k + 1. En este momento
la señal de entrada sale sin alteraciones
convirtiéndose en la señal yk+1, Al mismo tiempo esta
señal es regresada alsumador mediante el bloque de ganancia alfa
para proveer la siguiente en-trada al bloque de retardo D.
Matemáticamente tenemos que:
rk = yk+1 (1.2)
También gracias a la acción de la retroalimentación
rk = xk − α ∗ yk (1.3)
Combinado las ecuaciones tenemos la ecuación en diferencias de
primer ordendel sistema.
yk+1 = xk − α ∗ yk (1.4)
1.3 Ecuaciones lineales de primer orden
Una ecuación en diferencias lineal de primer orden es aquella
que puedeexpresarse como:
p1(t)yt+1 + p2(t)yt = q (t)
(1.5)
4
-
8/17/2019 Alvarez Toala Ecuaciones en Diferencias
8/22
Donde p1(t), p2(t)yq (t) son funciones en la variable
discreta t. Si la sucesión
q (t) es nula, entonces la ecuación lineal recibe el
nombre de ecuación ho-mogénea.Cuando las funciones p1(t) y
p2(t) son constantes, se dice que la ecuaciónlineal (1.5)
es de coeficientes constantes.
Este tipo de ecuaciones son muy interesantes en el estudio de
din ámica depoblaciones. Suelen aparecer escritas como:
yt+1 = p(t)yt + q (t)
donde p(t)yt representa el crecimiento de la
población en el tiempo t y q (t) elnúmero
de individuos que en el tiempo t se incorporan a la
población comoconsecuencia de la inmigración.
1.3.1 Ejemplo 1
Supongamos que una determinada población de insectos con 100
individuos,duplica su número en cada generacíon, y que además,
10 nuevos individuos seincorporan en cada generación procedente de
otro lugar. Vamos a construiruna ecuación en diferencias que
modele a esta situación y posteriormente laresolveremos.
Del enunciado se deduce: yt = 2yt−1 + 10 y
y0 = y(0) = 100 lo que nospermite
escribir,
y1 = 2 ∗ 100 + 10
y2 = 2(2 ∗ 100 + 10) + 10 =
2 ∗ 2 ∗ 100 + 2 ∗ 10 + 10
y3 = 2 ∗ 2 ∗ 2 ∗ 100 +
2 ∗ 2 ∗ 10 + 2 ∗ 10 + 10
Generalizando:
yt = 2 ∗ ... ∗ 2 ∗100 +
2 ∗ ... ∗ 2 ∗10 + 2 ∗
... ∗ 2 ∗10 + ... +
2 ∗ 10 + 10(t) (t − 1) (t − 2)
= 2t ∗ 100 + 2t−1 ∗ 10 + 2t−2 ∗ 10 +
... + 2 ∗ 10 + 10= 2t ∗ 100 + (2t−1 +
2t−2 + ... + 21 + 20) ∗ 10= 2t ∗ 100 +
(2t−1 − 1) ∗ 10= 110 ∗ 2t − 10
5
-
8/17/2019 Alvarez Toala Ecuaciones en Diferencias
9/22
donde en el último de los pasos hemos utilizado la fórmula que
nos da la
suma de t términos de una progresión geométrica de
razón 2. La solución es,por tanto:
yt = 110 ∗ 2t − 10
1.4 Ecuaciones lineales de segundo orden
Una ecuación en diferencias lineal de segundo orden es aquella
que puedeexpresarse como:
p1(t)yt+2 + p2(t)yt+1 + p3(t)yt
= q (t) (1.6)
donde p1, p2(t), p3 y q (t) son funciones
en la variable discreta t.
Si la función q (t) = 0, entonces la ecuacion (1.6)
es una ecuaci ón lineal endiferencias homogénea de segundo orden
asociada. Además, si todas las fun-ciones p1, p2(t), p3
son constantes, entonces la ecuación (1.6) es una
ecuaciónen diferencias lineal de segundo orden con coeficientes
constantes.
1.4.1 Teorema de existencia
Veamos en primer lugar un teorema de existencia y unicidad de
solucíon parauna ecuación en diferencias lineal homogénea de
orden n.
Dada la siguiente ecuación lineal en diferencias homogénea de
orden n:
yt+n + p1(t)yt+n−1 +
... + pn(t)yt = 0
y dados n números reales k0, k1,...,kn−2, exite una única
solución, cumpliendo:
y0 = y(0) = k0, y1 = k1,...,yn−1 =
kn−1
Para realizar la demostración de este teorema es necesario
comenzar definiendola siguiente sucesión:
y0 = y(0) = k0, y1 = k1,...,yn−1 =
kn−1
y para los valores de t mayores que n1,
procedemos de la siguiente manera:
yn = − p1(0)yn−1 − ... − pn(0)y0 =
p1(0)kn−1 − ... − pn(0)k0
yn+1 =
− p1(1)yn − ... − pn(1)k1
6
-
8/17/2019 Alvarez Toala Ecuaciones en Diferencias
10/22
De esta manera, yt queda definida por la ley de
recurrencia anterior.
Puede comprobarse que yt es solución de la
ecuación pedida y cumple lascondiciones iniciales.Además, es la
única solución, ya que si wt es otra soluci ón que cumple:
w0 = k0, w1 = k1,...,wn−1 =
kn−1
la ley de recurrencia que hemos encontrado anteriormente,
determina el restode los valores de wt.
Consideremos la ecuación en diferencias lineal homogénea de
segundo orden
con coeficientes constantesayt+2 + byt+1 +
cyt = 0 (1.7)
cualquier combinación lineal de soluciones de la ecuación
anterior sigue siendootra solución.
1.4.2 Solución de ecuaciones en diferencias
Las ecuaciones en diferencias surgen de diferentes maneras,
algunas veces delmodelado directo de sistemas en tiempo discreto o
como una aproximacíon de
una ecuación diferencial que describe el comportamiento de un
sistema mod-elado como un sistema de tiempo continuo. El método de
la transformada Zpara resolver ecuaciones en diferencias lineales
con coeficientes constantes seemplea a continuación en un
ejemplo.
Encuentre una ecuación en diferencias para representar al
sistema que seindica en la figura que tiene sucesiones de entrada y
salida xk y yk respec-tivamente, donde D
es el bloque unitario de retardo y a y b
son gananciasconstantes de retroalimentación.
Figure 1.3: Sistema de ejemplo
7
-
8/17/2019 Alvarez Toala Ecuaciones en Diferencias
11/22
Introduciendo sucesiones intermedias de señales rk
y vk como se muestra
en la figura, en cada paso, las salidas de los bloques de
retardo son:
yk+1 = vk
yk+2 = vk+1
vk+1 = rk
yk+2 = rk
en el bloque de suma tenemos:
rk = xk − avk + byk
Sustituyendo obtenemos la ecuación en diferencias:
yk+2 = xk − ayk+1 + byk
Si en este ejemplo damos valores a = 1, b
= 2 y la sucesión de entrada xkes la escalón
unitario, y0 = 0, y1 = 1 resolver la
ecuación en diferencias:
yk+2 = xk − ayk+1 + byk
Sustituyendo tenemos:
yk+2 + yk+1 − 2yk = 1, (k ≥
0)
Aplicando la transformada Z tenemos:
Z {yk+2 + yk+1 − 2yk} =
Z {1, 1, 1,...}
Aplicando la propiedad de linealidad y el resultado
zz−1
:
Z {yk+2} + Z {yk+1}
− 2Z {yk} = z
z − 1
Usando la segunda propiedad de traslacíon de avance de un paso
Z {X k+1} =zX (z ) −
zx0 y de manera similar la sucesión con adelanto de dos pasos
X k+2,Z {X k+2} = z
2X (z ) − z 2x0 − zx1; se
tiene:
z 2Y (z ) − z 2y0 − zy1
+
[zY (z ) − zy0] − 2Y (z )
=
z
z − 1
Reorganizando:
(z 2 + z − 2)Y (z ) =
z
z − 1 + z 2y0 + z (y1 +
y0)
8
-
8/17/2019 Alvarez Toala Ecuaciones en Diferencias
12/22
Además como y0 = 0 y y1 = 1
(z 2 + z − 2)Y (z ) =
z
z − 1 + z
Lo que convenientemente es:
(z + 2)(z − 1)Y (z )
= z
z − 1 + z
y resolviendo para Y(z) da:
Y (z ) = z
(z + 2)(z − 1) +
z
(z + 2)(z − 1)2 =
z 2
(z + 2)(z − 1)2
Para obtener la sucesión solución yk es necesario
hallar la transformada in-
versa, descomponiendo en fracciones parciales tenemos:
Y (z ) = z 2
(z + 2)(z − 1)2 =
1
z
z
(z − 1)2 +
2
9
1
z − 1 −
2
9
z
z + 2
Usando la tabla breve de la transformada Z:
Z −1
z
z − a
=
ak
Z −1
z
(z − 1)2
= {k}
Obtenemos la sucesión solución para la ecuación en
diferencias:
yk =
1
3k +
2
9 −
2
9(−2)k
(k ≥ 0)
1.5 Sistemas discretos en Simulink
Al igual que los sistemas continuos, los sistemas discretos se
pueden repre-sentar en Simulink mediante su función de
transferencia. Para ello, existendos posibilidades:
1. Utilizar el bloque ‘Discrete Transfer Function’ de la
categoŕıa ‘Discrete’.Los coeficientes de numerador y denominador
se introducen como vectores,al igual que en el caso de los sistemas
continuos; y hay que especificar unparámetro adicional: el tiempo
de muestreo (sample time). Por ejemplo, siqueremos introducir la
siguiente función de transferencia:
G(z ) = z + 0.5
3z 2 + 1.5z + 2
Además suponiendo que el periodo de muestreo deseado fuese 0.1
segundos,los parámetros que tendrı́amos que introducir y el
resultado obtenido seŕıan:
9
-
8/17/2019 Alvarez Toala Ecuaciones en Diferencias
13/22
Figure 1.4: Parámetros de bloque
2. Utilizar el bloque ‘Discrete Filter’, también de la
categoŕıa ‘Discrete’.Los coeficientes de numerador y denominador
se introducen como vectores, aligual que en el caso anterior, pero
con la particularidad de que se trabaja enpotencias negativas de z.
Por ejemplo, la función de transferencia anterior,expresada en
potencias negativas de z quedaŕıa:
G(z ) = z + 0.5
3z 2 + 1.5z + 2 ∗
z −2
z −2 =
z −1 + 0.5z −2
3 + 1.5z −1 + 2z −2
Suponiendo el mismo periodo de muestreo de 0.1 segundos, la
forma de in-troducir el bloque seŕıa:
10
-
8/17/2019 Alvarez Toala Ecuaciones en Diferencias
14/22
Figure 1.5: Parámetros de bloque
1.6 Ejercicio
Simulación de un sistema discreto en Simulink del
comportamiento de unafundición, cuyo esquema se muestra en la
siguiente figura:
Figure 1.6: Diagrama de un sistema discreto de fundición
Básicamente, a la fundición llega diariamente un suministro de
lingotesde hierro, que se procesa para obtener un 80 por ciento de
piezas y un 20por ciento de residuos. Estos residuos son tratados,
con un tratamiento quedura un d́ıa completo, y se convierten de
nuevo en lingotes listos para serprocesados. Al mismo tiempo, del
stock de materia prima se pierde un ciertoporcentaje por
corrosión.
11
-
8/17/2019 Alvarez Toala Ecuaciones en Diferencias
15/22
Se puede modelar el sistema con dos entradas: el suministro
diario de materiaprima y las piezas pedidas por los clientes
(suponemos que sólo se fabricanlas piezas que se han pedido); y
una única salida: la cantidad de materiaprima en stock. De este
modo, buscamos ver cómo evoluciona el stock enfunción del
suministro y de la cantidad de piezas pedidas.
El esquema resultante de Simulink serı́a el siguiente:
Figure 1.7: Diagrama de bloques
Se pide:1. Introducir el esquema de Simulink mostrado
(atención: el tiempo demuestreo debe ser igual para todos los
bloques; fijaremos este valor a uno,indicando un periodo de
muestreo de un d́ıa).
Figure 1.8: Esquema del sistema en Simulink
12
-
8/17/2019 Alvarez Toala Ecuaciones en Diferencias
16/22
-
8/17/2019 Alvarez Toala Ecuaciones en Diferencias
17/22
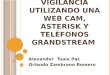
Obteniéndose el siguiente gráfico:
Figure 1.10: Sistema con suministro de 50 piezas pedidas
En el cual observamos que el sistema se estabiliza en una
pérdida de 300toneladas en el stock.
1.7 Funciones Z de Transferencia
Consideremos la ecuación en diferencias general lineal con
coeficientes con-stantes, modelo de un sistema lineal invariante en
el tiempo, con sucesi ón deentrada uk y sucesión de
salida yk. Ambas uk y yk son
sucesiones causalessiempre. El modelo de la ecuación en
diferencias toma la forma:
akyk+n + an−1yk+n−1 + an−2yk+n−2 + ... +
a0yk (1.8)− bmuk+m +
bm−1uk+m−1 + bm−2uk+m−2 + ... + b0uk
(1.9)
Donde k >= 0 y n, m (con n >=
m) son enteros positivos y las a1 y b1son
constantes.
La ecuación en diferencias antes mostrada difiere de ejemplos
mostrados paraecuaciones de diferencias y solución de ecuaciones
en diferencias en la posi-bilidad de que también están permitidos
términos con retardo en la sucesión
14
-
8/17/2019 Alvarez Toala Ecuaciones en Diferencias
18/22
de entrada uk.
El orden de la ecuación en diferencias es n si
an ≡ 0, y para que el sis-tema sea
f́ısicamente realizable n > m.
Suponiendo que el sistema esta inicialmente en estado de reposo,
aplicamosla transformada Z en toda la ecuacion (1) para lo cual
obtenemos.
(anz n + an−1z
n−1 + ... + a0)Y (z ) = (bmz m + bm−1z
m−1 + ... + b0)U (z ) (1.10)
Donde Y (z ) = Zyk y
U (z ) = Zuk. El sistema discreto o la función
z detransferencia G(z ) está
definida como:
G(z ) = Y (z )
U (z ) =
bmz m + bm−1z
m−1 + ... + b0anz n + an−1z n−1 +
... + a0
(1.11)
y normalmente se reorganiza (dividiendo el numerador y el
denominador en-tre an) de manera que el coeficiente
de z
n en el denominador sea 1. Al deducirG(z ) de esta forma,
hemos supuesto que el sistema estaba inicialmente enestado de
reposo.Esta suposiciòn ciertamente es válida para el sistema (1)
si:
y0 = y1 = ... = yn−1 = 0
(1.12)
u0 = u1 = ... = un−1 = 0
(1.13)
De aqúı diremos que esta en ”reposo” para definir que ningún
valor dis-tinto de cero está almacenado en los elementos de
retardo antes del tiempoinicial.Denotaremmos:
P (z ) = bmz m + bm−1z
m−1 + ... + b0 (1.14)
Q(z ) = anz n + an−1z
n−1 + ... + a0 (1.15)
Y la función de transferencia discreta puede expresarse
como:
G(z ) = P (z )
Q(z ) (1.16)
Para Q(z ) = 0 es llamada la ecuaciòn
caraster̀ıstica del sistema discreto,su orden n
determina el orden del sistema y sus raı̀ces se llaman polos
de lafunciòn de transferencia discreta.
15
-
8/17/2019 Alvarez Toala Ecuaciones en Diferencias
19/22
Ejemplo:Dibuje un diagrama de bloque para representar el sistema
modelado por laecuaciòn en diferencias:
yk+2 + 3yk+1 − yk = uk
(1.17)
y encuentre la funciòn z de transferencia correspondiente.
Solución
La ecuación en diferencias puede pensarse como la relación
entre los miem-bros adyacentes de la sucesión yk. Aśı en
cada paso de tiempo k tenemos, apartir de la ecuación
dada:
yk+2 = −3yk+1 + yk + uk (1.18)
En esta figura se apreciar la subestructura del diagrama de
bloque básicode 2do orden y en la otra se puede apreciar el
diagrama de bloques de laecuación dada:
Figure 1.11: Diagrama de bloques
Subestructura del diagrama de bloques 2do orden en el dominio de
latransformada Z y la representación del diagrama de bloque en el
dominio dela transformada z de la ecuación del problema.
16
-
8/17/2019 Alvarez Toala Ecuaciones en Diferencias
20/22
Figure 1.12: Diagrama de bloques
La cual provee una fórmula para yk+2 que también
involucra a yk, yk+1 yla entrada uk.Podremos
elaborar un diagrama de bloque en el dominio de la transformadaZ
usando un proceso semejante. Aplicando la tranformada Z.
Suponiendoque tenemos un estado inicial de reposo tendremos
que:
z 2Y (z ) +
3zY (z ) − Y (z )
= U (z ) (1.19)
z 2Y (z ) = −3zY (z )
+ Y (z ) + U (z ) (1.20)
Con esto es sencillo construir la señal transformada
z 2Y (z ) de la ecuación(1.20) y acomodarla para
que esté disponible en el entrada de la unión desuma S en la
figura:
17
-
8/17/2019 Alvarez Toala Ecuaciones en Diferencias
21/22
Figure 1.13: Diagrama de bloque
En la figura podemos ver que mostramos el diagrama de bloques
resul-tante. Y la función de transferencia obtenida enseguida de
la ecuación (1.19)queda como:
G(z ) = Y (z )
U (z ) =
1
z 2 + 3z − 1 (1.21)
18
-
8/17/2019 Alvarez Toala Ecuaciones en Diferencias
22/22
References
[1] Matemáticas Avanzadas para Ingenieŕıa - 2da Edición -
Glyn James
[2] En ĺınea, Manual avanzado de Simulink para la asignatura
fundamentosde automática. Universidad de Valladolid.
[3] En ĺınea, Ejemplos de Simulink, Pedro Corcuera. Universidad
deCantabria
19