Embed Size (px)
Citation preview
1
Análisis de la complejidad y caracterización de autómatas celulares unidimensionales. Facultad de Física.
Universidad de La Habana
© 2017 FF.UH
Análisis de la complejidad y caracterización de autómatas
celulares unidimensionales.
K. García1*,1
1 3er año. Facultad de Física. Universidad de la Habana. Colina Universitaria, Vedado, 10400 La Habana,
Cuba
PACS 81.10.Aj,05.10.-a,05.45.-a,05.90.+m.
En este trabajo nos proponemos analizar estadísticamente la evolución temporal de las configuraciones del autómata
celular y estudiar la sensibilidad a cambios en la configuración inicial de distintas reglas. Usaremos distintos tipos de
distancias de información, las cuales han sido usadas previamente para la caracterización de autómatas celulares.
Aquí las vincularemos con la densidad de entropía en las configuraciones. Incorporamos al cálculo de la densidad de
entropía y de las distancias de información el uso de la complejidad de Lempel-Ziv, evitando el carácter
indeterminable de la aleatoriedad de Kolmogorov. La reducción de entropía en una configuración a medida que el
sistema evoluciona en el tiempo está en relación con las capacidades del CA como procesador de información, y
gracias a este análisis estas podrían ser utilizadas para simular diversos procesos o sistemas dinámicos de otra
naturaleza.
1 Introducción
La aparición de patrones complejos en la evolución temporal de los autómatas celulares (CA por
sus siglas en inglés) a partir de configuraciones iniciales triviales ha sido ya objeto de estudio en diversas
ocasiones y con diversos enfoques [2]. Dado un número finito estados p, y un rango finito de interacción
r, el CA evoluciona según su regla local y sin embargo puede mostrar grandes relaciones espaciales y
temporales. Es capaz de mostrar desde comportamientos periódicos hasta capacidades de cómputo
universal. Cuando p=2 y r=1 estamos en presencia del autómata celular elemental (ECA) el cual se
define sobre 223= 256 [2] reglas locales, cuando r >1 estamos en presencia del autómata celular no
elemental (NON ECA).
Se ha utilizado la complejidad de Kolmogorov o complejidad algorítmica para estudiar el CA [3]. La
complejidad de Kolmogorov de un sistema no es más que la longitud del algoritmo o programa más
pequeño que, corriendo en una máquina universal de Turing (UTM), es capaz de reproducir el sistema
(aleatoriedad de Kolmogorov) [4,5]. Pero esta presenta una dificultad fundamental, no existe un manera
sistemática de determinar si el algoritmo encontrado es el más pequeño que existe; esto está en relación
directa con el “problema de parada” [5]. Esto nos obliga a buscar una alternativa para determinar la
complejidad de un sistema. Aquí estudiamos la evolución de los CA atendiendo a la complejidad de sus
relaciones espaciales y temporales usando magnitudes estadísticas que se pueden determinar a partir de la
complejidad de Lempel-Ziv (complejidad LZ76) [6]. Ziv demostró que el valor asintótico de la densidad
de crecimiento de la complejidad LZ76 (complejidad LZ76 normalizada por n/log n donde n es la
longitud de la cadena) está en relación con la densidad de entropía (como la definió Shannon) de una
fuente ergódica [7] (todos los estados son accesibles). Pero la densidad de entropía tiene también una
relación con la aleatoriedad de Kolmogorov [10]. Usando la complejidad LZ76 como medidor de la
densidad de entropía evitamos la incapacidad de calcular la complejidad de Kolmogorov. Usamos en el
estudio cadenas de 104 sitios totalmente aleatorias, las cuales evolucionaron a lo largo de igual cantidad
de pasos temporales. Este trabajo representa una continuidad del estudio presentado en el artículo
“Lempel-Ziv complexity analysis of one dimensional cellular automata” por E. Estevez-Rams, R. Lora-
Serrano, C. A. J. Nunes, y B. Aragón-Fernández [1].
2 Autómata celular
Un autómata celular unidimensional a las instancias de este trabajo se define por la terna (∑, 𝑠, 𝛷) donde
∑ es un alfabeto finito de cardinalidad 𝜎, 𝑠 = 𝑠0, 𝑠1, … , 𝑠𝑁−1 es un arreglo de sitios y 𝛷 es una regla de
actualización local. Denotaremos por s (i, j) la subcadena 𝑠𝑖,𝑠𝑖+1, … , 𝑠𝑗 tomada de s y de longitud j –
i+1. Si 𝑠𝑡 = 𝑠0𝑡 , 𝑠1
𝑡, … , 𝑠𝑁𝑡 denota la configuración de los sitios s en el instante t entonces se cumple que:
𝑠𝑡 = 𝛷[𝑠𝑡−1(𝑖 − 𝑟, 𝑖 + 𝑟)]
(1)

2 Análisis de la complejidad y caracterización de autómatas celulares unidimensionales. Facultad de Física.
Universidad de La Habana
© 2017 FF.UH
En el caso de los ECA se tiene que 𝜎 = 2 (usamos el alfabeto binario {0,1}) y r = 1; en el caso de los
NON ECA r >1. A cada regla de actualización local de los CA se le asigna una etiqueta R acorde al
esquema [9]:
𝑅 = 𝛷(0,0,0)20 + 𝛷(0,0,1)21 + 𝛷(0,1,0)22 + ⋯ 𝛷(1,1,1)27
Los CA se pueden clasificar de diversas maneras [10], la más usada es la clasificación de Wolfram. Esta
clasifica los CA partiendo de una configuración inicial aleatoria en:
W1: la configuración evoluciona a un estado homogéneo.
W2: la configuración evoluciona a un estado periódico.
W3: la configuración evoluciona a un estado que presenta patrones aperiódicos y caóticos.
W4: la configuración evoluciona a un estado con patrones complejos y de larga duración, además se observan
estructuras relacionadas y bien localizadas.
Esta clasificación resulta ambigua [11] ya que las reglas pueden presentar elevada sensibilidad a cambios
en la configuración inicial y una misma regla se puede comportar de distintas formas dadas distintas
configuraciones iniciales.
2.1 Factorización de Lempel-Ziv
Definamos el operador 𝜋 como 𝑠(𝑖, 𝑗)𝜋 = 𝑠(𝑖, 𝑗 − 1). Es fácil ver que:
𝑠(𝑖, 𝑗)𝜋𝑘 = 𝑠(𝑖, 𝑗 − 𝑘)
La factorización 𝐹(𝑠) de la cadena s de longitud N en m factores es tal que:
𝐹(𝑠) = 𝑠(1, 𝑙1)𝑠(𝑙1 + 1, 𝑙2) … 𝑠(𝑙𝑚−1 + 1, 𝑁)
Donde cada factor 𝑠(𝑙𝑘−1 + 1, 𝑙𝑘) … satisface:
𝑠(𝑙𝑘−1 + 1, 𝑙𝑘)𝜋 ⊂ 𝑠(1, 𝑙𝑘)𝜋2
𝑠(𝑙𝑘−1 + 1, 𝑙𝑘) ⊄ 𝑠(1, 𝑙𝑘) 𝜋 excepto, quizás, el último término de la cadena
Consideremos, por ejemplo, la cadena s=11011101000011; su factorización será:
F(s)=1.10.111.010.0001.1 donde se tienen 6 factores.
La complejidad LZ76 ( 𝐶𝐿𝑍(𝑠)) se define como la cantidad de factores en la factorización de s. Por
ejemplo, para la cadena anterior 𝐶𝐿𝑍(𝑠) = 6. Se puede demostrar que en el límite donde N→∞
𝐶𝐿𝑍(𝑠) se encuentra acotada por [8]:
𝐶𝐿𝑍(𝑠) <𝑁
𝑙𝑜𝑔𝑁
Si definimos la densidad de entropía como:
ℎ(𝑠) = 𝑙𝑖𝑚𝑁→∞
𝐻[𝑠(1, 𝑁)]
𝑁
donde 𝐻[𝑠(1, 𝑁)] es la entropía de bloque de Shannon [12], entonces definiendo:
𝑐𝐿𝑍(𝑠) =𝐶𝐿𝑍(𝑠)
𝑁 𝑙𝑜𝑔𝑁⁄
se cumplirá que si 𝑠 es producida por una fuente ergódica:
𝑙𝑖𝑚𝑠𝑢𝑝 𝑁→∞
𝑐𝐿𝑍(𝑠) = ℎ(𝑠)
Esta expresión permite utilizar 𝑐𝐿𝑍 como un estimado de ℎ𝜇.
(2)
(3)
(7)
(8)
(4)
(6)
(5)
3
Análisis de la complejidad y caracterización de autómatas celulares unidimensionales. Facultad de Física.
Universidad de La Habana
© 2017 FF.UH
2.2 Aleatoriedad de Kolmogorov. Distancia algorítmica.
La aleatoriedad de Kolmogorov 𝐾(𝑠) no es más que el tamaño del algoritmo más pequeño que corriendo
en una UTM reproduce a s:
𝐾(𝑠) = |𝑠∗|
Una cadena constante se podrá generar con un algoritmo muy pequeño simplemente repitiendo el bit de
información N veces, mientras que una cadena totalmente aleatoria (p.e. el tiro de una moneda) sólo
puede ser reproducida con ella misma .Existen además la aleatoriedad condicional de Kolmogorov
𝐾(𝑠|𝑝) que es la longitud del algoritmo más corto que corriendo en una UTM reproduce a 𝑠 a partir de
𝑝; y la complejidad conjunta de Kolmogorov 𝐾(𝑠, 𝑝) que es la longitud del algoritmo más corto que
corriendo en una UTM es capaz de reproducir 𝑠 y 𝑝. Se cumple que:
𝐾(𝑠, 𝑝) ≅ 𝐾(𝑠) + 𝐾(𝑝|𝑠∗) = 𝐾(𝑝) + 𝐾(𝑠|𝑝∗)
La densidad de entropía se puede estimar por:
ℎ(𝑠) = 𝑙𝑖𝑚|𝑆|→∞
𝐾(𝑠)
|𝑆|
Dadas dos cadenas 𝑠 y 𝑝 se puede definir la distancia de información normalizada (NID) como:
𝑑𝑁𝐼𝐷(𝑠, 𝑝) =𝑚𝑎𝑥 {𝐾(𝑠|𝑝∗), 𝐾(𝑝|𝑠∗)}
𝑚𝑎𝑥 {𝐾(𝑠), 𝐾(𝑝)}
Esta NID caracteriza cuanto distan algorítmicamente 𝑠 y 𝑝 . Si se tienen dos cadenas de baja
aleatoriedad de Kolmogorov y una puede ser una obtenida a partir de la otra mediante un algoritmo
pequeño ellas tienen pequeña NID entre sí. Si contrariamente ellas no están relacionadas
algorítmicamente la NID será muy cercana a 1 (máxima). Dos cadenas aleatorias pero muy parecidas sitio
a sitio también tienen pequeña NID.
No es muy complejo ver que 𝐾(𝑠|𝑝∗) ≅ 𝐾(𝑠, 𝑝) − 𝐾(𝑝); entonces también se cumple que 𝐾(𝑠|𝑝) es
aproximadamente igual a 𝐾(𝑠𝑝) − 𝐾(𝑝) donde 𝑠𝑝 es la unión de las dos cadenas. Con este resultado
podemos aproximar la NID por:
𝑑𝑁𝐼𝐷(𝑠, 𝑝) =𝐾(𝑠𝑝) − 𝑚𝑖𝑛 {𝐾(𝑠), 𝐾(𝑝)}
𝑚𝑎𝑥 {𝐾(𝑠), 𝐾(𝑝)}
Si 𝑠 y 𝑝 tienen la misma longitud, podemos escribir la NID en términos de la densidad de entropía:
𝑑𝑁𝐼𝐷(𝑠, 𝑝) =ℎ(𝑠𝑝) − 𝑚𝑖𝑛 {ℎ(𝑠), ℎ(𝑝)}
𝑚𝑎𝑥 {ℎ(𝑠), ℎ(𝑝)}
Pero ya se vio que podemos aproximar la densidad de entropía por 𝑐𝐿𝑍. Luego podemos definir:
𝑑𝐿𝑍(𝑠, 𝑝) =𝑐𝐿𝑍(𝑠𝑝) − 𝑚𝑖𝑛 {𝑐𝐿𝑍(𝑠), 𝑐𝐿𝑍(𝑝)}
𝑚𝑎𝑥 {𝑐𝐿𝑍(𝑠), 𝑐𝐿𝑍(𝑝)}
Esta última expresión es completamente determinable y es con ella que se trabaja.
3 Resultados en ECA
3.1 Evolución de las densidades de entropía
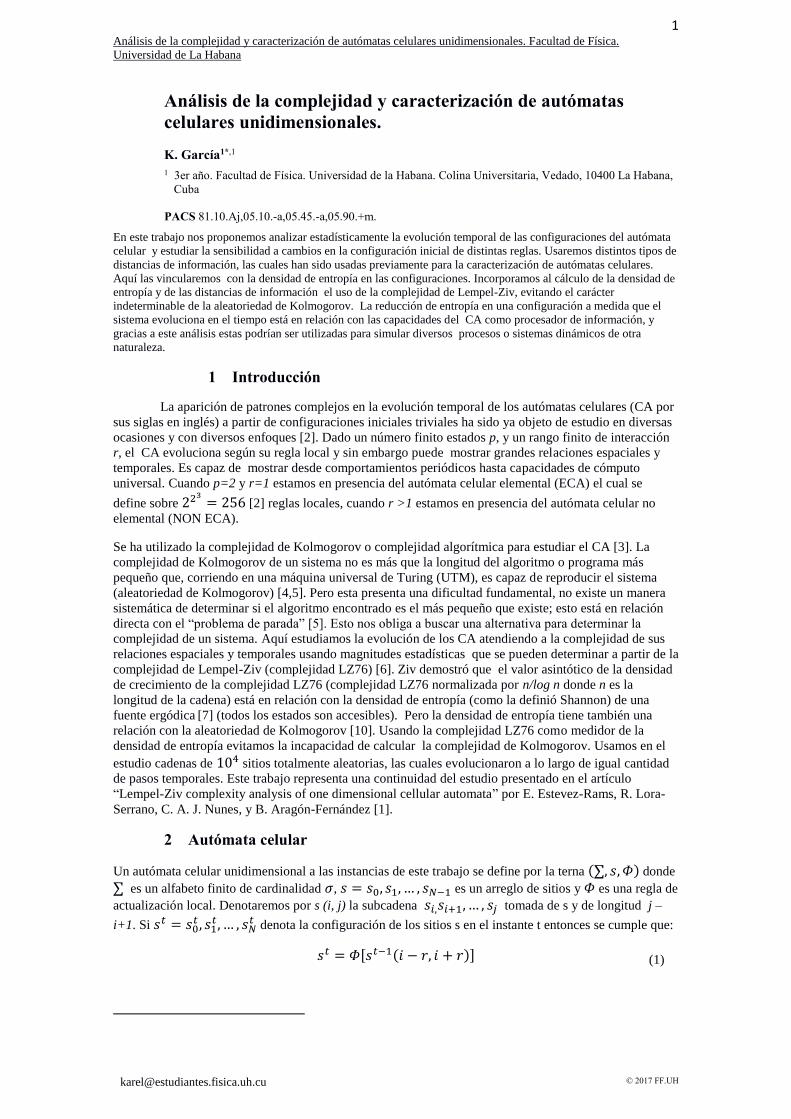
Fig. 1 Se observan en general algunas reglas que evolucionan a
estados de muy baja entropía (ECA 110 con capacidad de cómputo
universal [9]); entre estas están en efecto las reglas del grupo W1,
pero también hay reglas de otros grupos según la clasificación de
Wolfram. Otro grupo de reglas evolucionan a estados de valores de
densidad de entropía medios (54,41), algunas más rápidamente que
otras. Como es de esperar también existe un tercer grupo de reglas que
se mantienen en un estado de entropía máxima (106), o sea, mantienen
la entropía de la configuración aleatoria inicial.
(9)
(10)
(11)
(12)
(13)
(14)
(15)

4 Análisis de la complejidad y caracterización de autómatas celulares unidimensionales. Facultad de Física.
Universidad de La Habana
© 2017 FF.UH
3.2 Transmisión de información
Calculamos la distancia 𝑑𝐿𝑍 entre las configuraciones 𝑠𝑡 y 𝑠𝑡−1 a cada paso de evolución; estos valores
se promediaron (desechando los 2 x 103 pasos iniciales), denotando el promedio por 𝑑𝐿𝑍𝑝
, y este se
graficó contra el valor final de densidad de entropía del ECA, el cual denotamos ℎ𝜇. La Fig. 2. muestra el
resultado.
Para cada regla estudiada se generaron 3 x 102 configuraciones perturbadas. Se midió la 𝑑𝐿𝑍 entre
ambos sistemas (perturbado y no perturbado) a cada paso y se graficó contra los pasos temporales
normalizados por la longitud de las cadenas. Algunos comportamientos observados se analizan en la
Fig. 3.
Se calculó el valor máximo de 𝑑𝐿𝑍 que se obtuvo con cada configuración perturbada para cada regla.
Estos valores se promediaron en cada caso, ese promedio se denotó 𝑑𝐿𝑍𝑚 y se graficó contra el valor final
de densidad entropía ℎ𝜇. En la Fig. 4 se pueden apreciar las agrupaciones que se obtienen. Además, se
dividió el valor final de la densidad de entropía ℎ𝜇 por 𝑑𝑚 y por 𝑑𝐿𝑍𝑝
, lo cual se muestra en la Fig. 5.
(a) (b) (c)
Fig. 3 (a) El sistema evoluciona (luego de una región de crecimiento o transiente que puede ser más o menos prolongada) a
un estado donde la 𝑑𝐿𝑍 se mantiene aproximadamente constante en valores menores que 10−1. (b) Comportamiento lineal
de la 𝑑𝐿𝑍 con el tiempo hasta alcanzar un valor de saturación que caracteriza a la regla e cuestión. (c)𝑑𝐿𝑍 se comporta de
manera fractal, crece por cierto tiempo hasta que vuelve a caer a valores cercanos a cero, cada cierto tiempo ambas
configuraciones casi coinciden. (ECA 150 pertenece al grupo W3)
Fig. 4 Aquellas reglas con baja densidad de entropía se
encuentran dispersas por una región de 𝑑𝑚 que va desde
0 hasta valores medios (recordar que la máxima 𝑑𝑚 es
1) (dm1). Por otra parte, las reglas que muestran poca
sensibilidad a los cambios en la configuración inicial
están dispersas por casi todo el rango de valores de
densidad de entropía (dm3). Finalmente, las reglas que
presentan patrones complejos y que evolucionan a
estados caóticos presentan elevada sensibilidad a los
cambios en la configuración inicial y valores de
densidad de entropía relativamente elevados (dm2).
Fig. 2 Se denotaron los grupos como dp3 y (dp1 +dp2). En el
segundo se realizó esta subdivisión ya que dp1 contiene exclusiva
mente reglas pertenecientes a W1, mientras que dp2 contiene
exclusivamente reglas pertenecientes a W2.Las reglas en dp1
presentan 𝑑𝐿𝑍𝑝
= 0 y muy pequeños valores de ℎ𝜇.Podemos concluir
que estas reglas transmiten totalmente la información de un instante
al siguiente. Por otra parte, las reglas pertenecientes a dp2 presentan
valores de 𝑑𝐿𝑍𝑝
entre 10−3 y 10−1 y se encuentran dispersas por
prácticamente todo el rango de valores de entropías finales. A
medida que aumenta la entropía final del grupo disminuye la 𝑑𝐿𝑍𝑝
.
En dp3 se tienen las reglas de W3 y W4, además de algunas de W2.
Se abarca todo el rango de valores de entropía final, pero todo el
grupo presenta elevados valores de 𝑑𝐿𝑍𝑝
.esto indica que la
información que contenía la configuración inicial se perdió.
3.3 Sensibilidad a cambios en la configuración
inicial
Se aplicaron las reglas sobre una configuración inicial
aleatoria de 104 sitios a lo largo de igual cantidad de
pasos temporales, y luego sobre otra configuración
inicial que difiere de la primera en un único sitio el
cual se escogió de forma aleatoria.
5
Análisis de la complejidad y caracterización de autómatas celulares unidimensionales. Facultad de Física.
Universidad de La Habana
© 2017 FF.UH
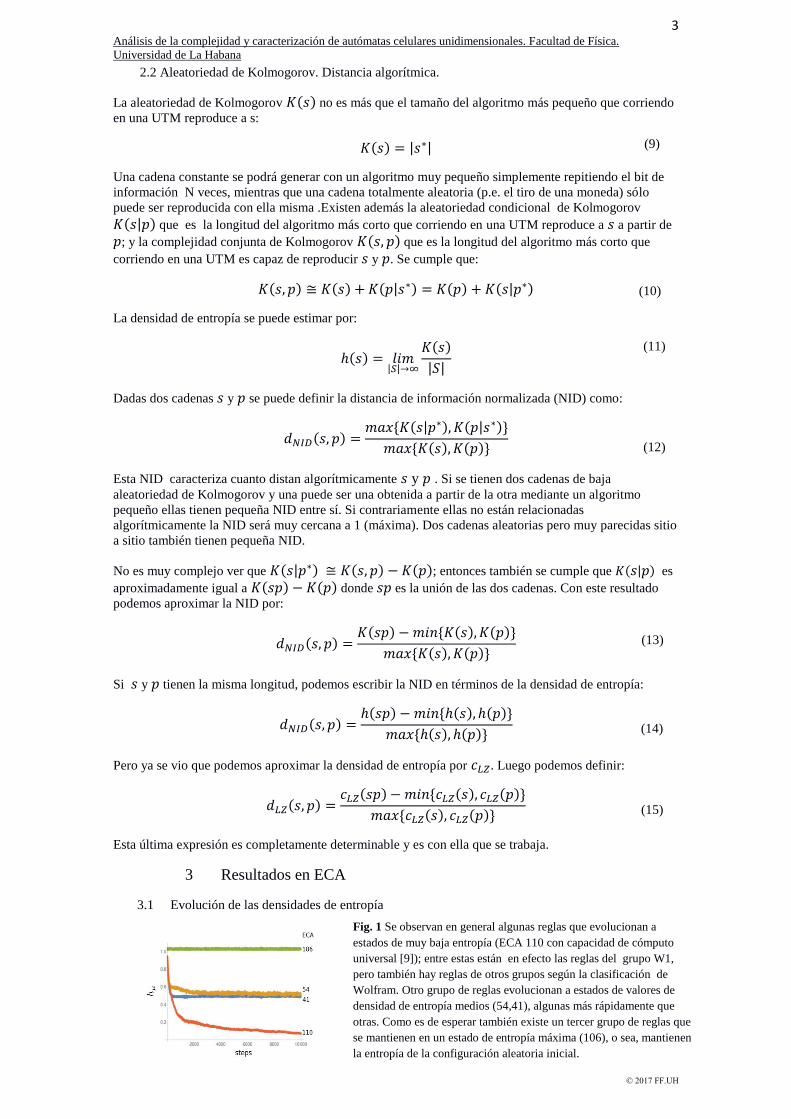
4 Resultados en NON ECA
4.1 Evolución de las densidades de entropía.
Luego se realizó un trabajo similar en los NON ECA. El análisis se hizo para CA de rango 2 (𝑟 = 2). La
cantidad de reglas de actualización local (𝛷) que existe en NON ECA es muy grande, por lo que el
estudio se hace sobre muestras de la totalidad. Estas muestras se generaron aleatoriamente. Se siguió
trabajando con configuraciones iniciales aleatorias de 104 sitios las cuales evolucionaron a lo largo de
igual cantidad de pasos temporales. Se calculó a cada paso la densidad de entropía para chequear su
evolución. La Fig. 6 muestra distintos tipos de comportamiento observados.
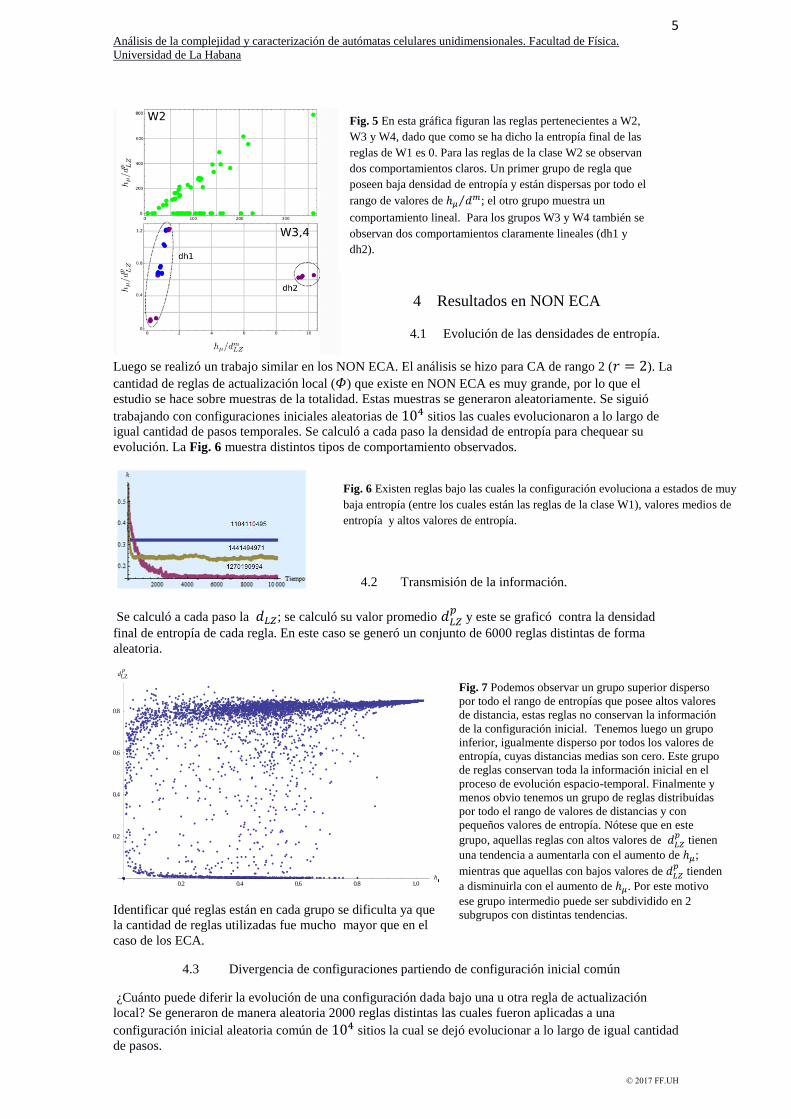
Se calculó a cada paso la 𝑑𝐿𝑍; se calculó su valor promedio 𝑑𝐿𝑍𝑝
y este se graficó contra la densidad
final de entropía de cada regla. En este caso se generó un conjunto de 6000 reglas distintas de forma
aleatoria.
Identificar qué reglas están en cada grupo se dificulta ya que
la cantidad de reglas utilizadas fue mucho mayor que en el
caso de los ECA.
4.3 Divergencia de configuraciones partiendo de configuración inicial común
¿Cuánto puede diferir la evolución de una configuración dada bajo una u otra regla de actualización
local? Se generaron de manera aleatoria 2000 reglas distintas las cuales fueron aplicadas a una
configuración inicial aleatoria común de 104 sitios la cual se dejó evolucionar a lo largo de igual cantidad
de pasos.
0.2 0.4 0.6 0.8 1.0h
0.2
0.4
0.6
0.8
dLZp
Fig. 6 Existen reglas bajo las cuales la configuración evoluciona a estados de muy
baja entropía (entre los cuales están las reglas de la clase W1), valores medios de
entropía y altos valores de entropía.
Fig. 7 Podemos observar un grupo superior disperso
por todo el rango de entropías que posee altos valores
de distancia, estas reglas no conservan la información
de la configuración inicial. Tenemos luego un grupo
inferior, igualmente disperso por todos los valores de
entropía, cuyas distancias medias son cero. Este grupo
de reglas conservan toda la información inicial en el
proceso de evolución espacio-temporal. Finalmente y
menos obvio tenemos un grupo de reglas distribuidas
por todo el rango de valores de distancias y con
pequeños valores de entropía. Nótese que en este
grupo, aquellas reglas con altos valores de 𝑑𝐿𝑍𝑝
tienen
una tendencia a aumentarla con el aumento de ℎ𝜇;
mientras que aquellas con bajos valores de 𝑑𝐿𝑍𝑝
tienden
a disminuirla con el aumento de ℎ𝜇. Por este motivo
ese grupo intermedio puede ser subdividido en 2
subgrupos con distintas tendencias.
Fig. 5 En esta gráfica figuran las reglas pertenecientes a W2,
W3 y W4, dado que como se ha dicho la entropía final de las
reglas de W1 es 0. Para las reglas de la clase W2 se observan
dos comportamientos claros. Un primer grupo de regla que
poseen baja densidad de entropía y están dispersas por todo el
rango de valores de ℎ𝜇 𝑑𝑚⁄ ; el otro grupo muestra un
comportamiento lineal. Para los grupos W3 y W4 también se
observan dos comportamientos claramente lineales (dh1 y
dh2).
4.2 Transmisión de la información.
6 Análisis de la complejidad y caracterización de autómatas celulares unidimensionales. Facultad de Física.
Universidad de La Habana
© 2017 FF.UH
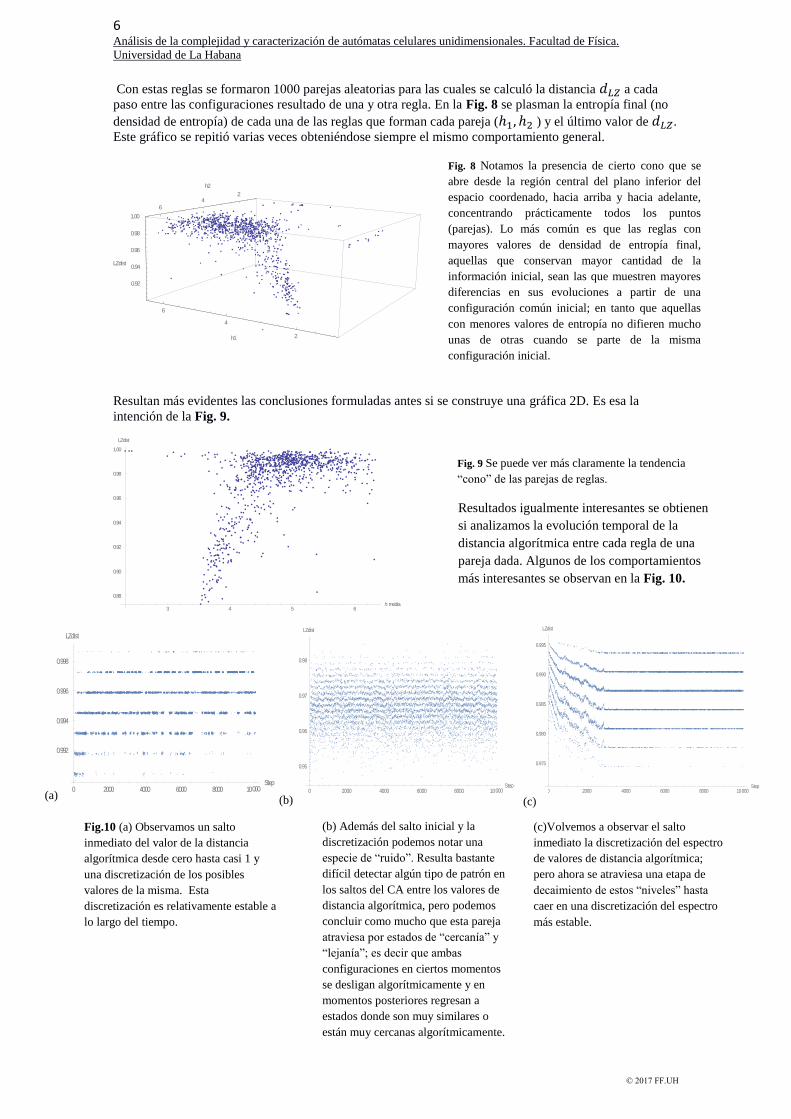
Con estas reglas se formaron 1000 parejas aleatorias para las cuales se calculó la distancia 𝑑𝐿𝑍 a cada
paso entre las configuraciones resultado de una y otra regla. En la Fig. 8 se plasman la entropía final (no
densidad de entropía) de cada una de las reglas que forman cada pareja (ℎ1, ℎ2 ) y el último valor de 𝑑𝐿𝑍.
Este gráfico se repitió varias veces obteniéndose siempre el mismo comportamiento general.
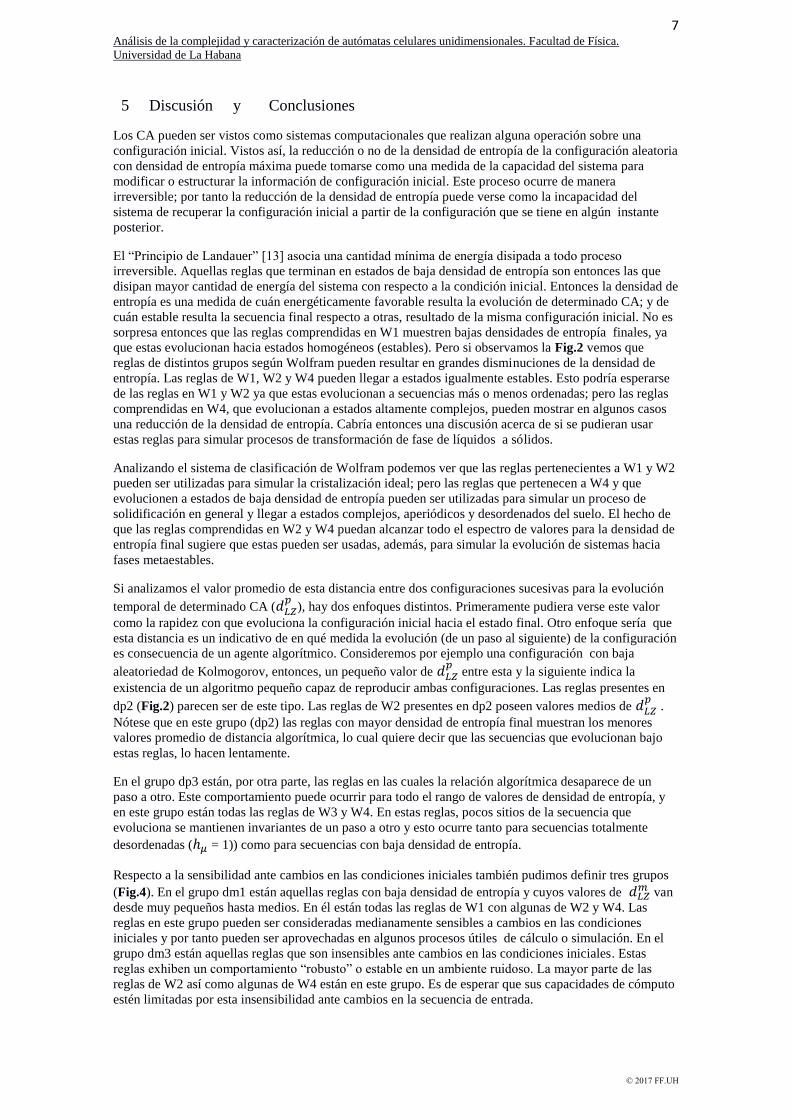
Resultan más evidentes las conclusiones formuladas antes si se construye una gráfica 2D. Es esa la
intención de la Fig. 9.
2
4
6
h1
24
6
h2
0.92
0.94
0.96
0.98
1.00
LZdist
3 4 5 6h media
0.88
0.90
0.92
0.94
0.96
0.98
1.00
LZdist
0 2000 4000 6000 8000 10000Step
0.992
0.994
0.996
0.998
LZdist
0 2000 4000 6000 8000 10000Step
0.95
0.96
0.97
0.98
LZdist
0 2000 4000 6000 8000 10000Step
0.975
0.980
0.985
0.990
0.995
LZdist
Fig. 9 Se puede ver más claramente la tendencia
“cono” de las parejas de reglas.
Fig. 8 Notamos la presencia de cierto cono que se
abre desde la región central del plano inferior del
espacio coordenado, hacia arriba y hacia adelante,
concentrando prácticamente todos los puntos
(parejas). Lo más común es que las reglas con
mayores valores de densidad de entropía final,
aquellas que conservan mayor cantidad de la
información inicial, sean las que muestren mayores
diferencias en sus evoluciones a partir de una
configuración común inicial; en tanto que aquellas
con menores valores de entropía no difieren mucho
unas de otras cuando se parte de la misma
configuración inicial.
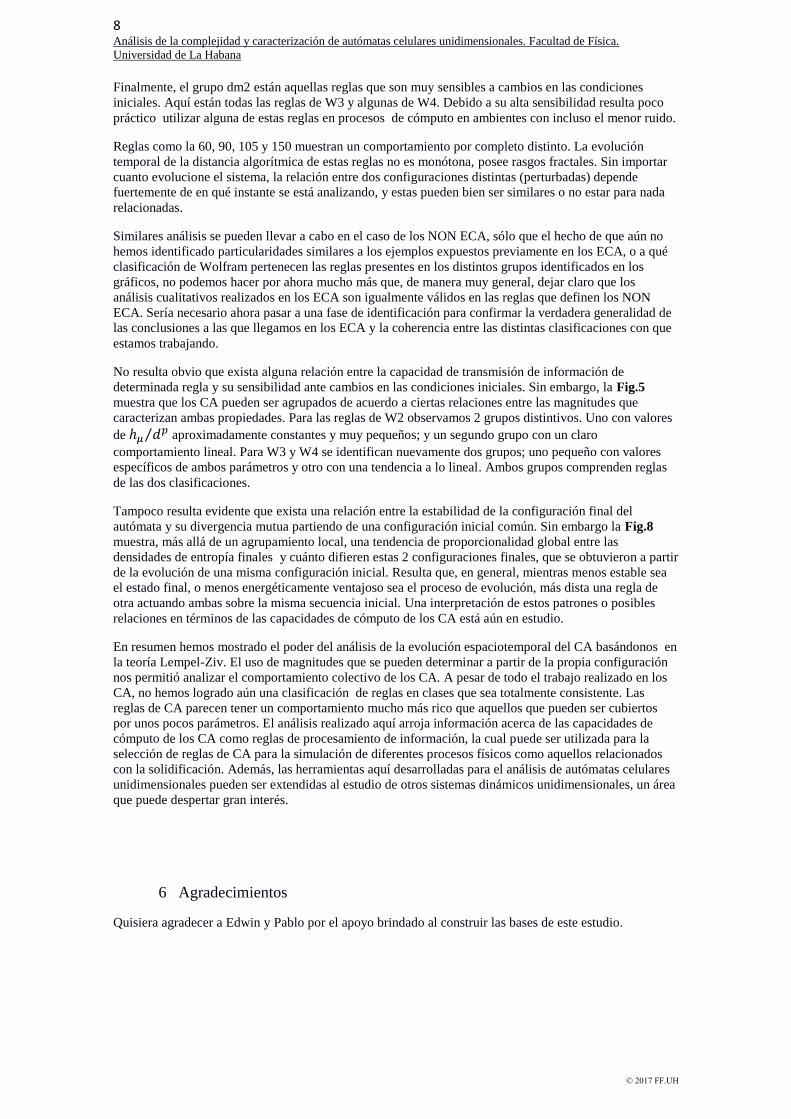
Resultados igualmente interesantes se obtienen
si analizamos la evolución temporal de la
distancia algorítmica entre cada regla de una
pareja dada. Algunos de los comportamientos
más interesantes se observan en la Fig. 10.
Fig.10 (a) Observamos un salto
inmediato del valor de la distancia
algorítmica desde cero hasta casi 1 y
una discretización de los posibles
valores de la misma. Esta
discretización es relativamente estable a
lo largo del tiempo.
(b) Además del salto inicial y la
discretización podemos notar una
especie de “ruido”. Resulta bastante
difícil detectar algún tipo de patrón en
los saltos del CA entre los valores de
distancia algorítmica, pero podemos
concluir como mucho que esta pareja
atraviesa por estados de “cercanía” y
“lejanía”; es decir que ambas
configuraciones en ciertos momentos
se desligan algorítmicamente y en
momentos posteriores regresan a
estados donde son muy similares o
están muy cercanas algorítmicamente.
(c)Volvemos a observar el salto
inmediato la discretización del espectro
de valores de distancia algorítmica;
pero ahora se atraviesa una etapa de
decaimiento de estos “niveles” hasta
caer en una discretización del espectro
más estable.
(a) (b) (c)
7
Análisis de la complejidad y caracterización de autómatas celulares unidimensionales. Facultad de Física.
Universidad de La Habana
© 2017 FF.UH
5 Discusión y Conclusiones
Los CA pueden ser vistos como sistemas computacionales que realizan alguna operación sobre una
configuración inicial. Vistos así, la reducción o no de la densidad de entropía de la configuración aleatoria
con densidad de entropía máxima puede tomarse como una medida de la capacidad del sistema para
modificar o estructurar la información de configuración inicial. Este proceso ocurre de manera
irreversible; por tanto la reducción de la densidad de entropía puede verse como la incapacidad del
sistema de recuperar la configuración inicial a partir de la configuración que se tiene en algún instante
posterior.
El “Principio de Landauer” [13] asocia una cantidad mínima de energía disipada a todo proceso
irreversible. Aquellas reglas que terminan en estados de baja densidad de entropía son entonces las que
disipan mayor cantidad de energía del sistema con respecto a la condición inicial. Entonces la densidad de
entropía es una medida de cuán energéticamente favorable resulta la evolución de determinado CA; y de
cuán estable resulta la secuencia final respecto a otras, resultado de la misma configuración inicial. No es
sorpresa entonces que las reglas comprendidas en W1 muestren bajas densidades de entropía finales, ya
que estas evolucionan hacia estados homogéneos (estables). Pero si observamos la Fig.2 vemos que
reglas de distintos grupos según Wolfram pueden resultar en grandes disminuciones de la densidad de
entropía. Las reglas de W1, W2 y W4 pueden llegar a estados igualmente estables. Esto podría esperarse
de las reglas en W1 y W2 ya que estas evolucionan a secuencias más o menos ordenadas; pero las reglas
comprendidas en W4, que evolucionan a estados altamente complejos, pueden mostrar en algunos casos
una reducción de la densidad de entropía. Cabría entonces una discusión acerca de si se pudieran usar
estas reglas para simular procesos de transformación de fase de líquidos a sólidos.
Analizando el sistema de clasificación de Wolfram podemos ver que las reglas pertenecientes a W1 y W2
pueden ser utilizadas para simular la cristalización ideal; pero las reglas que pertenecen a W4 y que
evolucionen a estados de baja densidad de entropía pueden ser utilizadas para simular un proceso de
solidificación en general y llegar a estados complejos, aperiódicos y desordenados del suelo. El hecho de
que las reglas comprendidas en W2 y W4 puedan alcanzar todo el espectro de valores para la densidad de
entropía final sugiere que estas pueden ser usadas, además, para simular la evolución de sistemas hacia
fases metaestables.
Si analizamos el valor promedio de esta distancia entre dos configuraciones sucesivas para la evolución
temporal de determinado CA (𝑑𝐿𝑍𝑝
), hay dos enfoques distintos. Primeramente pudiera verse este valor
como la rapidez con que evoluciona la configuración inicial hacia el estado final. Otro enfoque sería que
esta distancia es un indicativo de en qué medida la evolución (de un paso al siguiente) de la configuración
es consecuencia de un agente algorítmico. Consideremos por ejemplo una configuración con baja
aleatoriedad de Kolmogorov, entonces, un pequeño valor de 𝑑𝐿𝑍𝑝
entre esta y la siguiente indica la
existencia de un algoritmo pequeño capaz de reproducir ambas configuraciones. Las reglas presentes en
dp2 (Fig.2) parecen ser de este tipo. Las reglas de W2 presentes en dp2 poseen valores medios de 𝑑𝐿𝑍𝑝
.
Nótese que en este grupo (dp2) las reglas con mayor densidad de entropía final muestran los menores
valores promedio de distancia algorítmica, lo cual quiere decir que las secuencias que evolucionan bajo
estas reglas, lo hacen lentamente.
En el grupo dp3 están, por otra parte, las reglas en las cuales la relación algorítmica desaparece de un
paso a otro. Este comportamiento puede ocurrir para todo el rango de valores de densidad de entropía, y
en este grupo están todas las reglas de W3 y W4. En estas reglas, pocos sitios de la secuencia que
evoluciona se mantienen invariantes de un paso a otro y esto ocurre tanto para secuencias totalmente
desordenadas (ℎ𝜇 = 1)) como para secuencias con baja densidad de entropía.
Respecto a la sensibilidad ante cambios en las condiciones iniciales también pudimos definir tres grupos
(Fig.4). En el grupo dm1 están aquellas reglas con baja densidad de entropía y cuyos valores de 𝑑𝐿𝑍𝑚 van
desde muy pequeños hasta medios. En él están todas las reglas de W1 con algunas de W2 y W4. Las
reglas en este grupo pueden ser consideradas medianamente sensibles a cambios en las condiciones
iniciales y por tanto pueden ser aprovechadas en algunos procesos útiles de cálculo o simulación. En el
grupo dm3 están aquellas reglas que son insensibles ante cambios en las condiciones iniciales. Estas
reglas exhiben un comportamiento “robusto” o estable en un ambiente ruidoso. La mayor parte de las
reglas de W2 así como algunas de W4 están en este grupo. Es de esperar que sus capacidades de cómputo
estén limitadas por esta insensibilidad ante cambios en la secuencia de entrada.
8 Análisis de la complejidad y caracterización de autómatas celulares unidimensionales. Facultad de Física.
Universidad de La Habana
© 2017 FF.UH
Finalmente, el grupo dm2 están aquellas reglas que son muy sensibles a cambios en las condiciones
iniciales. Aquí están todas las reglas de W3 y algunas de W4. Debido a su alta sensibilidad resulta poco
práctico utilizar alguna de estas reglas en procesos de cómputo en ambientes con incluso el menor ruido.
Reglas como la 60, 90, 105 y 150 muestran un comportamiento por completo distinto. La evolución
temporal de la distancia algorítmica de estas reglas no es monótona, posee rasgos fractales. Sin importar
cuanto evolucione el sistema, la relación entre dos configuraciones distintas (perturbadas) depende
fuertemente de en qué instante se está analizando, y estas pueden bien ser similares o no estar para nada
relacionadas.
Similares análisis se pueden llevar a cabo en el caso de los NON ECA, sólo que el hecho de que aún no
hemos identificado particularidades similares a los ejemplos expuestos previamente en los ECA, o a qué
clasificación de Wolfram pertenecen las reglas presentes en los distintos grupos identificados en los
gráficos, no podemos hacer por ahora mucho más que, de manera muy general, dejar claro que los
análisis cualitativos realizados en los ECA son igualmente válidos en las reglas que definen los NON
ECA. Sería necesario ahora pasar a una fase de identificación para confirmar la verdadera generalidad de
las conclusiones a las que llegamos en los ECA y la coherencia entre las distintas clasificaciones con que
estamos trabajando.
No resulta obvio que exista alguna relación entre la capacidad de transmisión de información de
determinada regla y su sensibilidad ante cambios en las condiciones iniciales. Sin embargo, la Fig.5
muestra que los CA pueden ser agrupados de acuerdo a ciertas relaciones entre las magnitudes que
caracterizan ambas propiedades. Para las reglas de W2 observamos 2 grupos distintivos. Uno con valores
de ℎ𝜇 𝑑𝑝⁄ aproximadamente constantes y muy pequeños; y un segundo grupo con un claro
comportamiento lineal. Para W3 y W4 se identifican nuevamente dos grupos; uno pequeño con valores
específicos de ambos parámetros y otro con una tendencia a lo lineal. Ambos grupos comprenden reglas
de las dos clasificaciones.
Tampoco resulta evidente que exista una relación entre la estabilidad de la configuración final del
autómata y su divergencia mutua partiendo de una configuración inicial común. Sin embargo la Fig.8
muestra, más allá de un agrupamiento local, una tendencia de proporcionalidad global entre las
densidades de entropía finales y cuánto difieren estas 2 configuraciones finales, que se obtuvieron a partir
de la evolución de una misma configuración inicial. Resulta que, en general, mientras menos estable sea
el estado final, o menos energéticamente ventajoso sea el proceso de evolución, más dista una regla de
otra actuando ambas sobre la misma secuencia inicial. Una interpretación de estos patrones o posibles
relaciones en términos de las capacidades de cómputo de los CA está aún en estudio.
En resumen hemos mostrado el poder del análisis de la evolución espaciotemporal del CA basándonos en
la teoría Lempel-Ziv. El uso de magnitudes que se pueden determinar a partir de la propia configuración
nos permitió analizar el comportamiento colectivo de los CA. A pesar de todo el trabajo realizado en los
CA, no hemos logrado aún una clasificación de reglas en clases que sea totalmente consistente. Las
reglas de CA parecen tener un comportamiento mucho más rico que aquellos que pueden ser cubiertos
por unos pocos parámetros. El análisis realizado aquí arroja información acerca de las capacidades de
cómputo de los CA como reglas de procesamiento de información, la cual puede ser utilizada para la
selección de reglas de CA para la simulación de diferentes procesos físicos como aquellos relacionados
con la solidificación. Además, las herramientas aquí desarrolladas para el análisis de autómatas celulares
unidimensionales pueden ser extendidas al estudio de otros sistemas dinámicos unidimensionales, un área
que puede despertar gran interés.
6 Agradecimientos
Quisiera agradecer a Edwin y Pablo por el apoyo brindado al construir las bases de este estudio.
9
Análisis de la complejidad y caracterización de autómatas celulares unidimensionales. Facultad de Física.
Universidad de La Habana
© 2017 FF.UH
7 Bibliografía
[1] E. Estevez-Rams, R. Lora-Serrano, C. A. J. Nunes, and B. Aragón-Fernández, “Lempel-Ziv
complexity analysis of one dimensional cellular automata”.
[2] S. Wolfram, Theory and Applications of Cellular Automata (World
Scientific Press, Singapore, 1986).
[3] J.-C. Dubacq, B. Durand, and E. Formenti, “Kolmogorov complexity and
cellular automata classification,” Theor. Comput. Sci. 259, 271–285 (2001).
[4] A. N. Kolmogorov, “Three approaches to the concept of the amount of
information,” Probl. Inf. Transm. (Engl. Transl.) 1, 1–7 (1965).
[5] M. Li and P. Vitnyi, An Introduction to Kolmogorov Complexity and Its
Applications (Springer Verlag, 1993).
[6] A. Lempel and J. Ziv, “On the complexity of finite sequences,” IEEE
Trans. Inf. Theory IT-22, 75–81 (1976).
[7] J. Ziv, “Coding theorems for individual sequences,” IEEE Trans. Inf.
Theory IT-24, 405–412 (1978).
[8] C. S. Calude, Information and Randomness (Springer Verlag, 2002).
[9] S. Wolfram, A New Kind of Science (Wolfram media, Inc., Champaign,
Illinois, 2002).
[10] J. Kari, “Theory of cellular automata: A survey,” Theor. Comput. Sci. 334,
3–33 (2005).
[11] K. Culik and S. Yu, “Undecidability of CA classification schemes,”
Complex Syst. 2, 177–190 (1988).
[12] T. M. Cover and J. A. Thomas, Elements of Information Theory, 2nd ed.
(Wiley Interscience, New Jersey, 2006).
[13] R. Landauer, “Dissipation and heat generation in the computing process,”
IBM J. Res. Dev. 5, 183–191 (1961).