Embed Size (px)
DESCRIPTION
Automatsko
Citation preview

Osnove automatskog upravljanja
Literatura
Šurina Tugomir: “Analiza i sinteza servo-mehanizama i procesne
regulacije”, Zagreb, 1989.
Vukić Z., Kuljača LJ.: “Automatsko upravljanje – analiza linearnih
sustava”, Zagreb, 2005.
Pašalić N.: “Osnovi Automatske regulacije”, Zagreb, 1977.
Božičević T.: “Automatsko vođenje procesa”, Zagreb, 1973.
Božičević J.:”Temelji automatike 1 i 2”, Zagreb, 1989.
Richard C. Dorf, Robert H. Bishop: ”Modern Control Systems”, Prentice
Hall; 12 edition (July 29, 2010)

Osnove automatskog upravljanja
Teorija automatskog upravljanja
okružuje nas u svim segmentima života
upravljanje u zatvorenoj petlji
negativna povratna veza i postizanje homeostaze – Norbert Wiener -
1943. godina
pozitivna povratna veza – temelj reostaze
primjena negativne povratne veze: Darwinova teorija evolucije, biološki
sustavi, automobilska industrija, potrošačka elektronika,...
Osnove automatskog upravljanja
Osnovni pojmovi - podjela automatskog upravljanja
Podjela s obzirom na pristup razvoju teorije i tehnike
1. FENOMENOLOŠKI PRISTUP – proučavanje je
specifično i razlikuje se u ovisnosti od ciljane
inženjerske struke
2. METODIČKI PRISTUP – proučavanje je neovisno o
području primjene te se sustavi iz različitih područja
prikazuju na jedinstven način

Osnove automatskog upravljanja
Osnovni pojmovi - podjela automatskog upravljanja
Podjela s obzirom na prirodu sustava u kojima je
zastupljena
1. UPRAVLJANJE U TEHNIČKIM SUSTAVIMA
2. UPRAVLJANJE U NETEHNIČKIM DINAMIČKIM SUSTAVIMA
• biološkim
• ekonomskim
• sociološkim
• političkim

Osnove automatskog upravljanja
Primjer upravljanja biološkim dinamičkim sustavom – ljudsko biće
1960. skupina znanstvenika iz SAD napisala je prvi članak koji analizira
povratno djelovanje na ljudsko ponašanje pod nazivom «Feedback
Theory of Human Behaviour»
ostvareni su temelji PERCEPCIJSKE TEORIJE UPRAVLJANJA
ljudsko biće je sastavljeno od skupa regulacijskih sustava sa povratnom
vezom kojima je cilj kontrola vlastite percepcije
Ljudsko biće djeluje kao sustav sa povratnom vezom

Osnove automatskog upravljanja
Primjer upravljanja biološkim dinamičkim sustavom – ljudsko biće
put koji je dječak odabrao da stigne do svog prijatelja - referentni ulazni
signal
oči imaju ulogu komparatora, odnosno «mjere» razliku između željenog
i stvarnog smjera gibanja
oči šalju signal mozgu, koji nato aktivira mišiće u nogama, te tako
korigiraju smjer gibanja
na sustav djeluju vanjski kontrolirani (cesta mijenja smjer) i
nekontrolirani utjecaji (nedovoljno svjetlosti, pažnju odvraća druga
osoba ili događaj)

Osnove automatskog upravljanja
Primjer upravljanja biološkim dinamičkim sustavom – ljudsko biće

Osnove automatskog upravljanja
Osnovni pojmovi - podjela automatskog upravljanja
Podjela s obzirom na povratnu vezu
1. UPRAVLJANJE BEZ POVRATNE VEZE (upravljanje u
otvorenoj petlji – feedforward control)
2. UPRAVLJANJE SA POVRATNOM (REGULACIJA) VEZOM
(feedback control)

Osnove automatskog upravljanja
Primjer upravljanja temperaturom prostorije u OTVORENOJ PETLJI
mjeri se vanjska temperatura A, a mjerni se signal dovodi na
upravljački uređaj, koji djeluje na motor M ventila V te tako utječe na
protok Q u radijator
Upravljanje temperaturom prostorije bez povratne veze

Osnove automatskog upravljanja
Primjer upravljanja temperaturom prostorije u OTVORENOJ PETLJI
Kod promatranog upravljanja uzeli smo u obzir dva poremećaja:
z'1 – temperaturni poremećaj uvjetovan otvaranjem prozora
z'2 – vanjska temperatura koja se mjeri
ovako strukturirano upravljanje ne može kompenzirati temperaturni poremećaj uvjetovan otvaranjem prozora
kompenzaciju poremećaja z'1 postižemo koristeći sustav sa povratnom vezom
Protok Q je funkcija vanjske temperature

Osnove automatskog upravljanja
Primjer upravljanja temperaturom prostorije u OTVORENOJ PETLJI
Blok shema feedforward upravljanja

Osnove automatskog upravljanja
Primjer upravljanja temperaturom prostorije u ZATVORENOJ PETLJI
mjeri se temperatura prostorije, a mjerni se signal dovodi na regulacijski
uređaj, koji djeluje na motor M ventila V te tako utječe na protok Q u
radijator
Upravljanje temperaturom prostorije s povratnom vezom
Osnove automatskog upravljanja
Primjer upravljanja temperaturom prostorije u ZATVORENOJ PETLJI
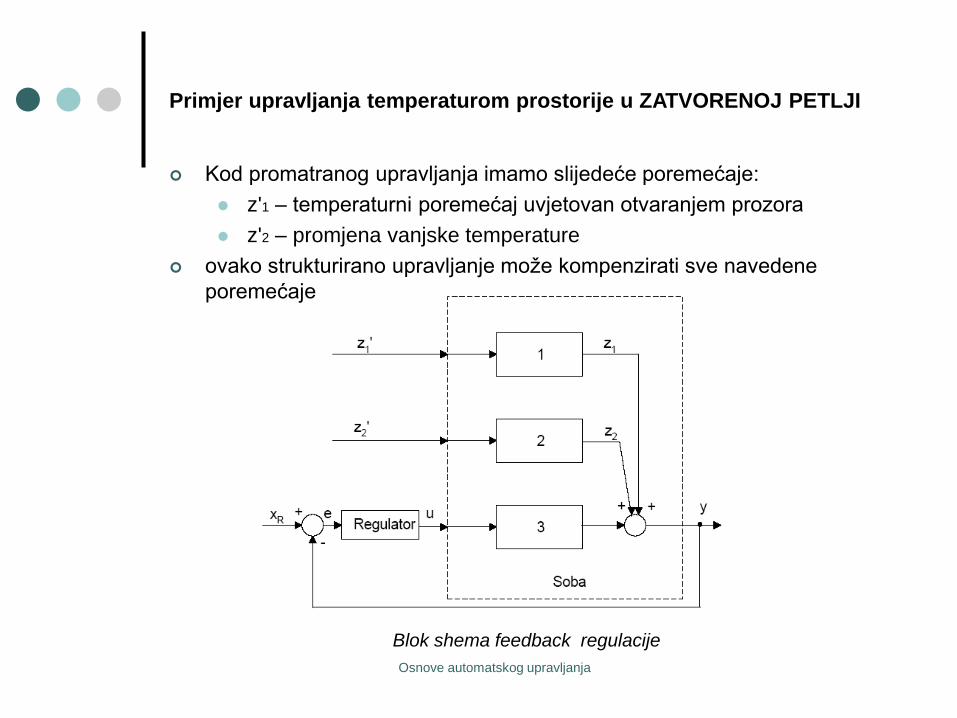
Kod promatranog upravljanja imamo slijedeće poremećaje:
z'1 – temperaturni poremećaj uvjetovan otvaranjem prozora
z'2 – promjena vanjske temperature
ovako strukturirano upravljanje može kompenzirati sve navedene
poremećaje
Blok shema feedback regulacije

Osnove automatskog upravljanja
Usporedba karakteristika upravljanja u otvorenoj petlji i regulacije sa
negativnom povratnom vezom
Upravljanje u otvorenoj petlji Regulacija u zatvorenoj petlji
- predstavlja otvoreni tok djelovanja
(upravljački lanac)
- kompenzira utjecaj samo one smetnje s
obzirom na koju se projektira upravljački
uređaj
- ako je upravljački uređaj sam po sebi
stabilan, ostaje stabilan i uz djelovanje
ovakvog upravljanja
- predstavlja zatvoreni tok djelovanja
(regulacijski krug, regulacijska petlja)
- može kompenzirati utjecaj svih smetnji
(negativna povratna veza)
- može postati nestabilan (regulirana
veličina može oscilirati, teoretski preko
svih granica

Osnove automatskog upravljanja
Osnovni pojmovi – dinamički sustavi automatskog
upravljanja
Doba automatizacije temelji na automatskom upravljanju i informacijskim tehnologijama.
Dinamički sustav predstavlja funkcijsku cjelinu za obradbu i prijenos energije, materije, informacije i kapitala, gdje se ulazne veličine sustava promatraju uzrokom, a izlazne veličine sustava njegovom vremenskom posljedicom.
Dinamičke sustave dijelimo na:
sustave s jednim ulazom i jednim izlazom - SISO sustav (Single Input Single Output) te
sustave s više ulaza i više izlaza - MIMO sustav (Multiple Input Multiple Output)
SISO sustav MIMO sustav

Osnove automatskog upravljanja
Osnovni pojmovi – dinamički sustavi automatskog
upravljanja
Dinamički sustav obično promatramo kroz tzv. kibernetski pristup.
Kibernetika je znanost pomoću koje se spoznaju zakonitosti procesa
upravljanja u prirodi, tehnici i društvu (analiza) kako bi se temeljem tih
spoznaja projektirali tehnički sustavi (sinteza) odnosno poboljšali
prirodni sustavi
(Norbert Wiener: Cybernetics or control and communication in the
animal and the machine, 1948)

Osnove automatskog upravljanja
Osnovni pojmovi – prikaz dinamičkog sustava pomoću blok
sheme
Dinamički sustav još nazivamo prijenosni sustav (prijenosni član ili podsustav ako
promatramo element odnosno dio cjelokupnog sustava).
Prijenosni sustavi imaju jednoznačni smjer djelovanja određen smjerom strelice.
Prijenosno vladanje sustava (člana) možemo prikazati na više načina:
pomoću diferencijalne jednadžbe (a),
pomoću vremenskog odziva na jediničnu odskočnu funkciju – prijelazna funkcija (b),
pomoću prijenosne funkcije (c).
(a) (b) (c)

Osnove automatskog upravljanja
Osnovni pojmovi – prikaz dinamičkog sustava pomoću blok
sheme
Za prikaz signala koji povezuju članove sustava koristimo slijedeće simbole:

Osnove automatskog upravljanja
Osnovni pojmovi – prikaz dinamičkog sustava pomoću blok
sheme
Sustave možemo prikazati i pomoću dijagrama toka signala:
Blok sheme Dijagrami toka

Osnove automatskog upravljanja
Principi djelovanja sustava upravljanja – regulacijskog sustava
Sustav upravljanja, odnosno regulacijski sustav ima dvije osnovne uloge:
1. Kompenzirati (odstraniti) utjecaje smetnji koje djeluju na proces.
Regulirana veličina y mora u tom slučaju ostati na vrijednosti određenoj
referentnom vrijednošću xR (željena, namještena vrijednost). Ovdje
govorimo o ČVRSTOJ REGULACIJI odnosno tzv. regulacijskom
problemu.
2. Omogućiti da regulirana veličina y čim bolje slijedi promjenjivu
referentnu vrijednost xR (vodeća vrijednost). Regulacijsko odstupanje je
prvenstveno posljedica promjene referentne vrijednosti a ne
vanjskih poremećaja. U ovom slučaju govorimo o SLIJEDNOJ
REGULACIJI (eng. Servo Mechanism, Tracking Control)

Osnove automatskog upravljanja
Osnovna struktura sustava upravljanja – regulacijskog sustava
Važno je naglasiti da je osnovni tehnički zahtjev prilikom projektiranja sustava automatskog upravljanja: da regulator mora biti tako projektiran da osigura stabilnost sustava
Osim toga, vrlo često moraju biti zadovoljeni i dodatni zahtjevi: ograničeno vrijeme potrebno za kompenzaciju utjecaja smetnje,
da regulacijsko odstupanje prouzročeno smetnjom bude minimalno,
da izlazna veličina sustava čim bolje slijedi vodeću veličinu,
…
Osnovni i dodatne zahtjeve zajedno prikažemo pomoću kriterija dobrote (kvalitete) regulacije (eng. stability-performance index).
Ako sustav upravljanja ispunjava tražene kriterije onda se takav sustav smatra optimalnim u smislu postavljenih kriterija.

Osnove automatskog upravljanja
Osnovna struktura sustava upravljanja – regulacijskog sustava
Na temelju prethodnih primjera možemo zaključiti da se regulacijski krug (eng.
Control loop) sastoji od četiri osnovna elementa:
- regulacijske staze (proces)
- mjernog člana
- regulatora
- izvršnog člana (aktuator, postavni član)
Osnovni signali unutar sustava su:
y – regulirana veličina (eng. controlled signal)
xR – referentna veličina (w, r) (eng. reference signal)
e – regulacijsko odstupanje (eng. control error signal)
u – upravljačka veličina (izvršna, postavna) (eng. control signal)
z – poremećaj (smetnja, šum) (eng. noise signal)
Osnovna uloga regulatora da “obradi” regulacijsko odstupanje:
e(t) = xR(t) - y(t), u = f(e)
po određenom algoritmu (zakonu upravljanja), djelujući preko izvršnog člana na
proces (zatvoreni tok signala).

Osnove automatskog upravljanja
Osnovna struktura sustava upravljanja – regulacijskog kruga
Regulacijski krug sa negativnom povratnom vezom
y – regulirana veličina
xR – referentna veličina (w, r)
e – regulacijsko odstupanje
u – upravljačka veličina (izvršna, postavna)
z – poremećaj (smetnja, šum)

Osnove automatskog upravljanja
Osnovna struktura sustava upravljanja – regulacijskog kruga
Uobičajeno je da u blokovskim prikazima regulacijski uređaj sačinjava
kombinacija regulatora i izvršnog člana.
U sklopu procesa često nalazimo i mjerni član
Osnove automatskog upravljanja
POVIJEST AUTOMATSKOG UPRAVLJANJA
razvoj sustava upravljanja sa povratnom vezom usko je povezan sa problemima kojima se čovječansto suočavalo tijekom povijesnog razvoja
iako je najveći napredak zabilježen u neposrednoj prošlosti, možemoizdvojiti pet najznačajnijih razdoblja u razvoju sustava upravljanja:
1. pretpovijesno razdoblje – sve do 1886. godine
2. rano razdoblje – od 1886. godine do početka 20. stoljeća
3. klasična teorija – od početka 20. stoljeća do 1960. godine
4. moderno razdoblje – od 1960. godine do 1980. godine
5. post-moderno razdoblje – od 1980. godine nadalje

Osnove automatskog upravljanja
POVIJEST AUTOMATSKOG UPRAVLJANJA – kratki povijesni pregled
Predpovijesno
razdoblje
- 1886.
Rano razdoblje
1886. - početak
20. stoljeća
Klasična
teorija
početak 20.
stoljeća – 1960.
Moderno
razdoblje
1960. – 1980.
Post-moderno
razdoblje
1980. -
Analiza
metode pokušaj
– pogreška,
intuicija,
umjetnost
upotreba
diferencijalnih
jednadžbi
Bode-ovi i
Nyquist-ovi
dijagrami, KMK
modeli u
prostoru stanja,
stohastični
procesi
H robustnost,
singularne
vrijednosti,
stabilnost po
Lyapunovu
Sinteza
plivajući
regulator, fantail
Watt-ov
regulator -
centrifugalni
regulator
PID, Lead – Lag
kompenzacija
LQR, Kalmanovi
filtri, LQG,
optimizacija
H sinteza,
sinteza,
robusna H2
sinteza, fuzzy
logic
Domena
vremenska vremenska frekvencijska vremenska frekvencijska
domena i alati iz
prostora stanja

Osnove automatskog upravljanja
Matematičko predstavljanje elemenata sustava upravljanja
Za opis vladanja sustava koristimo fizikalne i / ili druge zakonitosti ili se o
vladanju sustava zaključuje na temelju mjerenja.
MATEMATIČKI MODEL je matematička interpretacija vladanja sustava izražena
pomoću diferencijalnih, algebarski ili logičkih jednadžbi.
Namjena matematičkog modela:
Obično predstavlja polazište pri analizi i sintezi sustava upravljanja
Omogućava simulaciju sustava na računalu odnosno omogućava
"eksperimentiranje" na matematičkom modelu umjesto na stvarnom sustavu što je
iznimno korisno u fazi projektiranja
Postupak određivanja matematičkog modela je složen, a cilj mu je odrediti
STRUKTURU i PARAMETRE modela. Takav postupak nazivamo
IDENTIFIKACIJA MATEMATIČKOG MODELA, a poznamo:
TEORETSKU identifikaciju i
EKSPERIMENTALNU identifikaciju

Osnove automatskog upravljanja
Matematičko predstavljanje elemenata sustava upravljanja
TEORETSKA IDENTIFIKACIJA (sistemska analiza) temelji se na
poznavanju fizikalnih i drugih zakonitosti procesa i postavljanju
jednadžbi ravnoteže (mase, energije, impulsa gibanja).
EKSPERIMENTALNA IDENTIFIKACIJA zasniva se na mjerenju
ulazno-izlaznih veličina procesa te njihovog procesiranja.

Osnove automatskog upravljanja
Matematičko predstavljanje elemenata sustava upravljanja
U tablici su prikazani različiti oblici sustav koje možemo susresti. Matematički
model je naravno ovisan od pojedinog tipa sustava.

Osnove automatskog upravljanja
Opis linearnih kontinuiranih sustava u vremenskom području
OPIS POMOĆU DIFERENCIJALNE JEDNADŽBE
Linearne diferencijalne jednadžbe,
Parcijalne diferencijalne jednadžbe
Polazište takvog opisa je poznavanje fizikalnih zakonitosti.
Za električne sustave su to:
Kirchhoffov zakon,
Ohmov zakon,
Zakon indukcije,
Maxwellove jednadžbe,…
Za mehaničke sustave su to:
Newtonovi zakoni,
Zakoni ravnoteže sila i momenta,
Zakoni održanja impulsa gibanja i momenta,…

Osnove automatskog upravljanja
Opis linearnih kontinuiranih sustava u vremenskom području
Realni dinamički sustavi su obično nelinearni i vremenski varijantni, stoga
nailazimo na poteškoće, ne samo pri postavljanju matematičkog modela modela
(diferencijalna jednadžba), već i pri rješavanju tih jednadžbi.
Srećom, većinu dinamičkih sustava moguće ja aproksimirati linearnim fizikalnim
sustavom s vremenski invarijantnim parametrima koji su opisani s linearnim
diferencijalnim jednadžbama s konstantnim koeficijentima. Do njihovih
rješenja dolazimo egzaktno koristeći standardne postupke.
Opći oblik linearne diferencijalne jednadžbe
Ulaznu varijablu xu nazivamo pobuda, izlaznu varijablu xi odziv,
a0, ..., an i b0, ..., bm su konstantni parametri sustava i pobude
1 1
1 1 0 1 1 01
( ) ( ) ( ) ( ) ( ) ( )( ) ( )
n n m m
i i i u u un n i m m un n m m
d x t d x t dx t d x t d x t dx ta a a a x t b b b b x t
dt dt dt dt dt dt

Osnove automatskog upravljanja
Opis linearnih kontinuiranih sustava u vremenskom području
Ako na sustav djeluje vanjska pobuda govorimo o neautonomnom sustavu i
opisujemo ga nehomogenom diferencijalnom jednadžbom.
U slučaju da vanjska pobuda ne postoji, sustav nazivamo autonomnim
sustavom te ga opisujemo homogenom diferencijalnom jednadžbom:
1
1 1 0
( ) ( ) ( )( ) 0
n n
i i in n in n
d x t d x t dx ta a a a x t
dtdt dt

Osnove automatskog upravljanja
Opis linearnih kontinuiranih sustava u vremenskom području
Definicija linearnosti i vremenske invarijantnosti
Ako općenito pretpostavimo da pobuda xu(t) implicira odziv sustava xi(t) i to
zapišemo kako slijedi:
xu(t) xi(t)
sustav je linearan ako će dvije pobude sustava xu1(t) i xu2(t) izazvati odzive
xi1(t) i xi2(t), pri čemu vrijedi:
[axu1(t)+b bxu2(t)] [axi1(t)+ bxi2(t)],
a i b su konstante.
Sustav je vremenski invarijantan ako uz implikaciju
xu(t) xi(t), za -<t<
vrijedi:
xu(t+a) xi(t+a), za -<t<, -<a<

Osnove automatskog upravljanja
Opis linearnih kontinuiranih sustava u vremenskom području
- Zapis matematičkog modela električnog sustava
Korišenjem II Kirchhoffovog zakona možemo pisati:
dalje vrijedi:
pri čemu je C konstanta – fizikalna osobina kondentaora (kapacitivnost). Ako izraz za struju
uvrstimo u prvu jednadžbu, dobijemo
Dobili smo linearnu diferencijalnu jednadžbu prvog reda (P1 član). Jednadžba je prvog reda
jer sadrži samo jedan spremnik energije – kondenzator C! Ulazna varijabla xu zapravo napon
u(t), a izlazna varijabla xi napon na kondenzatoru uc(t). Vremenski invarijantni koeficijenti imaju
slijedeće vrijednosti:
a0 = 1, a1 = RC, b0 =1.
( )R c cu u R i u u t
cq idt Cu cdq du
i Cdt dt
( )( ) ( )c
c
du tRC u t u t
dt

Osnove automatskog upravljanja
Opis linearnih kontinuiranih sustava u vremenskom području
- Zapis matematičkog modela mehaničkog sustava
Mehanički sustav je sastavljen od mase M, opruge S i prigušivača D uz narinutu vanjsku silu
f(t). Primjenom D’Alembertova načela koje kaže da je zbroj svih vanjskih sila koje djeluju na
tijelo i sile tromosti tog tijela jednak nuli:
dobiti ćemo jednadžbu
fD je sila trenja prigušivača koje je razmjerna sa brzinom dx/dt uz D kao koeficijent viskoznog
trenja (fizikalna osobina prigušivača). fS je sila opruge razmjerna pomaku x, uz koeficijent S kao
krutost opruge. Konačno dobijemo linearnu diferencijalnu jednadžbu drugog reda (P2 član)
sa konstantnim koeficijentima. Ulazna varijabla xu je sila f(t), a izlazna varijabla xi pomak mase
x(t).
1
0n
i
i
f Mx
2
2( ) ( )D S
d x dxM f t f f f t D Sx
dt dt
2
2( )
d x dxM D Sx f t
dt dt

Osnove automatskog upravljanja
Opis linearnih kontinuiranih sustava u vremenskom području
Klasično rješenje diferencijalne jednadžbe
Postoje tri osnovne grupe postupaka za rješavanje linearne diferencijalne
jednadžbe:
Egzaktne analitičke metode su najtočnije ali i vrlo koplicirane kada
rješavamo složene sustave visokog reda.
Numeričke metode pomoću kojih dobijemo približno rješenje višestrukim
ponavljanjem algebarskih operacija. U tom slučaju nam je izuzetno koristan
alat digitalno računalo.
Analogni postupci koji pomoću analognog računala daju rješenje u
grafičkom obliku.
Zadatak: riješite diferencijalnu jednadžbu matematičkog modela opisanog
električnog sustava pomoću klasičnog postupka. Zadani parametri:
?)(
100)(
100
10
tu
Vtu
FC
kR
c

Osnove automatskog upravljanja
Analogije fizikalnih sustava
Sa stanovišta regulacijske tehnike, fizikalne sustave dijelimo na električne, mehaničke (translacijske i rotacijske),
pneumatske i toplinske. Da bi sustav matematički opisali, moramo primjeniti neke od osnovnih fizikalnih zakona za
odabrano područje. Tako električne krugove analiziramo pomoću Ohm-ovog ili Kirchhoff-ovih zakona, mehaničke sustave
pomoću Newton-ovog zakona ili D’Alembert-ovog načela, u termodinamici koristimo Fourier-ov zakon o prijenosu topline ili
Newton-ov zakon o hlađenju, u hidrodinamici Darcy-jev zakon o strujanju,... Svi ti zakoni temelje na osnovnim prirodnim
zakonitostima, kao što je načelo održanja energije (energetska bilanca), načelo održanja materije (zakon kontinuiteta) i
načelo održanja impulsa (zakon količine kretanja). Zato među varijablama različitih fizikalnih sustava postoje određene
analogije koje su prikazane u gornjoj tablici

Osnove automatskog upravljanja
Opis linearnih kontinuiranih sustava u vremenskom području
Dinamička analiza modela sustava
Dinamičko vladanje sustava = vremensko vladanje sustava
opisuje vremenski tok izlazne veličine sustava (procesa) xi(t) uz narinutu ulaznu veličinu sustava (procesa) xu(t)
Vezu između ulazno/izlaznih veličina moguće je općenito izraziti
pomoću operatora F, koji svakoj realnoj funkciji xu(t) pridruži realnu funkciju xi(t) :
xi(t)=F{xu(t)}
Budući da su sustavi podložni različitim tipovima pobudnih funkcija, nepraktično je izračunavati odziv za svaku ulaznu funkciju. Izračun pojednostavimo u slučaju da poznajemo težinsku funkciju g(t). U tom slučaju za odabranu pobudu xu(t)izračunamo odziv xi(t) pomoću konvolucijskog integrala:
Težinska funkcija (impulsni odziv, eng. Impulse Response) g(t) je odziv sustava na impulsnu funkciju (Diracov impuls, jedinični impuls)
0
( ) ( ) ( )t
i ux t g t x d
( )t

Osnove automatskog upravljanja
Opis linearnih kontinuiranih sustava u vremenskom području
Standardne pobudne funkcije
Vremenski odziv sustava na standardnu pobudu (obično odskočna funkcija) je
grafička metoda kojom ne dobijemo točne podatke o sustavu, ali je zato vrlo
koristan alat pri intuitivnom rješavanju problema.
Najčešće se koristi u regulaciji procesnih postrojenja, gdje je veoma teško
postaviti matematički model reguliranog kruga.
Iako su u većini realnih regulacijskih krugova poremećajne ili vodeće veličine
slučajnog karaktera, moguće je analizirati regulacijski krug ako te veličine
zamijenimo standardnim pobudama.
Tako se npr. odskočna, nagibna i parabolna funkcija primjenjuju pri analizi
točnosti servomehanizma, impulsna funkcija se koristi pri teoretskim analizama
za definiciju prijenosne funkcije.

Osnove automatskog upravljanja
Opis linearnih kontinuiranih sustava u vremenskom području
Standardne pobudne funkcije
Odskočna funkcija (slika a)) skokovito mijenja vrijednost od 0 na 1, zato se još
naziva i jedinični odskok. U “realnom svijetu” takvu pobudu predstavlja električni
prekidač koji uključuje elektromotor ili protočni ventil koji propušta vodu u
spremnik. Odskočna funkcija je definirana na slijedeći način:
Nagibna funkcija (slika b)) ili jedinični nagib tu(t) opisana je sa:
Predstavlja integral jediničnog odskoka u(t):
0 za 0( ) ( )
1 za 0
tf t u t
t
0 za 0( )
za 0
tf t
t t
0
( ) ( )f t u t dt

Osnove automatskog upravljanja
Opis linearnih kontinuiranih sustava u vremenskom području
Standardne pobudne funkcije
Parabolna funkcija (slika c)) predstavlja integral nagibne funkcije :
Analogno prijašnjim funkcijama nazivamo je i jedinična parabola t2u(t).
Impulsna funkcija (slika d)) nastaje derivacijom odskočne funkcije:
U trenutku t=0 ima amplitudu neizmjerne visine, što je naravno nemoguće
ostvariti, već ima samo teorijsko značenje. Nazivamo je još i Diracov impuls (t).
2
0 za 0( )
za 0
tf t
t t
( )( )
du tf t
dt
0 za 0
( ) ( ) za 0
0 za 0
t
f t t t
t

Osnove automatskog upravljanja
Opis linearnih kontinuiranih sustava u vremenskom području
Standardne pobudne funkcije
Integracijom Dirac-ove funkcije pokazati ćemo da zatvara jediničnu
površinu:
Zato funkciju nazivamo jedinični impuls.
Zadatak: integracijom pokažite kako od odskočne funkcije dobijemo nagibnu i
parabolnu funkciju.
( ) ( ) ( ) | 1 0 1t dt du t u t
Osnove automatskog upravljanja
Opis linearnih kontinuiranih sustava u vremenskom području
PRIJELAZNA FUNKCIJA
Vremenski odziv - analitičko rješenje diferencijalne jednadžbe uz
skokovitu promjenu pobudne funkcije.
Prijelazna funkcija predstavlja izlaznu funkciju svedenu na odskočnu
funkciju amplitude Xu na ulazu.
Ako je pobuda odskočna funkcija koja ima jediničnu amplitudu, onda je
vremenski odziv ujedno i prijelazna funkcija.
( )( )
( )
i
u
x th t
X u t

Osnove automatskog upravljanja
Opis linearnih kontinuiranih sustava u vremenskom području
VREMENSKI ODZIV OSNOVNIH SUSTAVA
Većinu matematičkih modela sustava možemo prikazati kombinacijom
svega nekoliko osnovnih članova (podsustava).
Proporcionalni član nultog reda (pojačivački član)
Nazivamo ga još i P0 - član. Električki on zapravo predstavlja običan
potenciometar ili mehaničku polugu kao mehanički sustav. Opći oblik
funkcionalne veze između izlazne i ulazne veličine opisan je prijelaznom
funkcijom:
Kp nazivamo prijenosni omjer (ako ulazna i izlazna funkcija imaju
različite fizikalne veličine – termoelement) ili pojačanje (ako ulaznu i
izlaznu funkciju mjerimo istom fizikalnom veličinom– potenciometar).
( )( )
( )
ip
u
x th t K
X u t

Osnove automatskog upravljanja
Opis linearnih kontinuiranih sustava u vremenskom području
VREMENSKI ODZIV OSNOVNIH SUSTAVA
Električni potenciometar Mehanička poluga
Grafički prikaz prijelazne funkcije za oba primjera
prikazan je na slici lijevo. Uz jedinični odskok na
ulazu (slika a)) dobijemo vremensku karakteristiku
izlazne veličine (slika b))
2
1 2
i u p u
Ru u K u
R R
i u p u
bx x K x
a

Osnove automatskog upravljanja
Opis linearnih kontinuiranih sustava u vremenskom području
VREMENSKI ODZIV OSNOVNIH SUSTAVA
Proporcionalni član prvog reda
Tipičan primjer takvog sustava je kombinacija otpornika R i kondenzatora C, RC
član. Budući da ga opisuje diferencijalna jednadžba prvog reda, nazivamo ga još i
P1- članom. Opći oblik prijelazne funkcije člana ima slijedeći oblik:
- Odzivna veličina se aperiodski približava konačnoj vrijednosti, zato taj član
nazivamo aperiodski član.
-Iz normiranog odziva na odskočnu pobudu slijedi definicija vremenske
konstante (): to je interval vremena koji bi protekao dok odzivna funkcija,
mijenjajući se maksimalnom brzinom, ne dostigne stacionarnu vrijednost.
- Tangenta na krivulju u bilo kojoj točki odsijeca sa pravcem maksimalne amplitude
uvijek isti vremenski interval – jednu vremensku kostantu. Odziv ima slijedeću
vrijednost nakon vremenskog intervala od jedne vremenske konstante:
Nakon vremenskog intervala od pet vremenskih kostanti (5), prijelazna
pojava nestane.
( )( ) (1 )
( )
t
ip
u
x th t K e
X u t
(1 ) (1 0,368) 0.632t
i p p pt tx K e K K

Osnove automatskog upravljanja
Opis linearnih kontinuiranih sustava u vremenskom području
VREMENSKI ODZIV OSNOVNIH SUSTAVA
Proporcionalni član drugog reda
Predstavlja ga ranije opisani mehanički sustav ili serijski spoj otpornika R, svitka L i
kondenzatora C (slika). Budući da sadrži dva spremnika energije (svitak i kondenzator)
opisuje ga diferencijalna jednadžba drugog reda. Zato ga nazivamo P2 - član.
- Po uključenju preklopnika, kondenzator se počinje nabijati preko otpornika i svitka.
- Struja raste sporije negoli kad u strujnom krugu ne bi imali svitka. Da nema svitka,
kondenzator bi se nakon određenog vremena (ovisno vremenskoj konstanti sustava)
nabijo na vršnu vrijednost narinutog napona čime bi prijelazna pojava bila okončana.
- U svitku se zbog prolaska struje pohranila magnetska energija, i nakon što se narinuta
struja smanuje prema nuli, stvara se protu EMS (Lenz-ov zakon).
- Razgrađivanje magnetskog polja svitka održava stuju u istom smjeru, pa se
kondenzator nabije na gotovo dvostruku vrijednost narinutog napona. (približno 2U0), u
krugu imamo razliku napona na kondenzatoru i napona napajanja, zato struja poteče
preko svitka i otpornika u suprotnom smjeru.
- Napon u obratnom smjeru ne može dostići istu vrijednost kao i ranije jer se dio
električne energije u otporniku pretvorio u toplinu.

Osnove automatskog upravljanja
Opis linearnih kontinuiranih sustava u vremenskom području
VREMENSKI ODZIV OSNOVNIH SUSTAVA
Proporcionalni član drugog reda
Iz opisanoga je jasno da je pojava oscilacijska, a nazivamo je prigušeno titranje.
Serijski RLC spoj opisuju slijedeća jednadžbe:
Rješenje diferencijalne jednadžbe se sastoji od dva dijela (komplementarne
funkcije i karakterističnog integrala – stacionarno stanje):
Ovisno o rješenju karakteristične jednadžbe sustava
postoje tri karakteristična slučaja:
2
0 02
1 c c
L r c c
d u dudiu u u L Ri idt U LC RC u U
dt C dt dt
1 2
2 10 0
1 2
t t
c cKF cPI
e eu u u U U
2
1,2 2
1
2 4
R R
L L LC

Osnove automatskog upravljanja
Opis linearnih kontinuiranih sustava u vremenskom području
VREMENSKI ODZIV OSNOVNIH SUSTAVA
Konjugirano kompleksni korijeni
Izlazna se veličina stacionarnom
stanju približava uz prigušene
oscilacije
Korijeni su realni i različiti
Izlazna se veličina monotono
približava stacionarnoj
vrijednosti
Jedan dvostruki korijen
To je granični aperiodski slučaj,
kada se izlazna funkcija najbrže
aperiodski približava
stacionarnom stanju
2
2
1
4
R
L LC
2
2
1
4
R
L LC
2
2
1
4
R
L LC
1,2
2
2
1 1, ,
2 4
je mjera za prigušenje oscilacija
prigušena vlastita frekvencija sustava
neprigušena vlastita frekvencija
p
p n
p
n
j
R R
L LC L LC
'
1,2
2'
2
1,
2 4
R R
L L LC
1,2
0 1 ( sin cos )t
c p p
p
u U e t t
' '
0 '1 ( )t
cu U e sh t ch t
0 1 (1 )t
cu U e t

Osnove automatskog upravljanja
Opis linearnih kontinuiranih sustava u vremenskom području
VREMENSKI ODZIV OSNOVNIH SUSTAVA
• Proporcionalni član drugog reda
Ako omjer nazovemo STUPANJ PRIGUŠENJA. Tada vrijedi:
- Kada je sustavu drugog reda fali član s prvom derivacijom. U tom slučaju se
energija ne troši pa sustav nazivamo konzervativni sustav.
- Prijelaznu funkciju P2 sustava možemo zapisati
n
1 za aperiodski slučaj,
1 za granični aperiodski slučaj,
0 1 za prigušeni oscilacijski slučaj,
0 za neprigušene oscilacije,
0 za raspirene oscilacije
0
' '
'
1 ( sin cos )
( )( ) 1 ( )
( )
1 (1 )
t
p p p
p
tip
u
t
p
K e t t
x th t K e sh t ch t
X u t
K e t

Osnove automatskog upravljanja
Opis linearnih kontinuiranih sustava u vremenskom području
VREMENSKI ODZIV OSNOVNIH SUSTAVA
Proporcionalni član drugog reda
Tri osnovna oblika odziva proporcionalnog člana drugog reda na odskočnu funkciju
(slika a)) možemo vidjeti na slici b).

Osnove automatskog upravljanja
Opis linearnih kontinuiranih sustava u vremenskom području
VREMENSKI ODZIV OSNOVNIH SUSTAVA
Integralni član
- Tipičan integralni član je istosmjerni elektromotor (slika a)). Uz konstantnu
struju magnetskog polja Im narinuti napon armature ua razmjeran je broju
okretaja n, odnosno kutnoj brzini .
- Ako je izraz za kutnu brzinu
onda je odnos između odziva i pobude ua:
prijelaznu funkciju I0 člana možemo pisati:
2d
ndt
i aK u dt
( )( )
( )
ii
u
x th t K t
X u t

Osnove automatskog upravljanja
Opis linearnih kontinuiranih sustava u vremenskom području
VREMENSKI ODZIV OSNOVNIH SUSTAVA
Derivacijski član
- Primjer derivacijskog člana predstavlja djelovanje električnog generatora,
npr tahogeneratora kojim se mjeri broj okretaja. Uz konstantnu struju
magnetskog polja Im, broj okretaja n i napon armature ua razmjerni su.
Odnos između ua i možemo zapisati:
Ovaj put je kut zakreta pobuda, a napon ua odziv!
Skokovit zakret za određeni kut na ulazu uzrokuje naponski impuls na izlazu.
Taj impuls padne naglo na nulu nakon što nestane zakret osovine na ulazu.
Prijelaznu funkciju D0 člana možemo pisati:
a d
du K
dt
0 za t<0( )
( ) za t=0( )
0 za t>0
i
u
x th t
X u t

Osnove automatskog upravljanja
Opis linearnih kontinuiranih sustava u vremenskom području
VREMENSKI ODZIV OSNOVNIH SUSTAVA
Član s mrtvim vremenom Tm
- Nije opisan diferencijalnom jednadžbom.
- Pojavljuje se obično u procesnoj industriji.
- Primjer takvog sustava predstavlja transportna vrpca za šljunak. Nakon
otvaranja zasuna na ulazu prolaz pune količine u jedinici vremena Q na
izlazu primjećuje se tek nakon izvjesnog “mrtvog” vremena Tm koje je
određeno omjerom prijeđenog puta L i brzine V.
Prijelaznu funkciju Tm člana možemo pisati:
0 za t<( )( )
1 za t( )
mi
mu
x th t
X u t

Osnove automatskog upravljanja
.

Osnove automatskog upravljanja
ANALIZA U PODRUČJU KOMPLEKSNE VARIJABLE
.






























