Embed Size (px)
Citation preview

Autonomous Vehicle System based on Law and Case Law using
Qualitative Representation
Satoshi Nishimura1, Asaki Iwata2, Miwa Kurokawa2, Shun-ya Maruta2,
Daisuke Kaji2, Shinji Niwa2, Takuichi Nishimura1, Yo Ehara1 1 National Institute of Advanced Industrial Science and Technology, Tokyo, Japan
{satoshi.nishimura, takuichi.nishimura, y-ehara}@aist.go.jp 2 DENSO Corp.
{ASAKI_IWATA, MIWA_KUROKAWA, SHUNYA_MARUTA, DAISUKE_KAJI, SHINJI_NIWA}@denso.co.jp
Abstract
Recently, autonomous vehicle technology has been develop-ing quickly. Under the circumstances, we specifically ex-amine the problem of how an autonomous system under-stands traffic rules. We developed a knowledge model for safe driving using traffic statute law, case law, and incident movies.
Introduction
Autonomous vehicle systems are expected to reduce
traffic accidents, congestion, and fuel consumption and to
improve comfort and convenience. Technology related to
autonomous vehicles, such as that of Waymo,1 has been
developed by Alphabet Inc. Realizing such an autonomous
vehicle system requires numerous and diverse technologies
such as data collection for real environments, machine
learning for driving actions, and improved driving intelli-
gence (driving environment cognition, perception, etc.). In
addition, it is important to visualize reasoning processes by
which autonomous vehicle systems determine driving ac-
tions (Zhao et al., 2016).
Human drivers determine their driving actions according
to their cognition and traffic statute law. Autonomous ve-
hicle systems should drive a vehicle according to traffic
statute laws to ensure safe driving. However, traffic statute
laws are written for human beings. It is difficult for auton-
omous vehicle systems to understand laws expressed that
way. We regard that point as the key issue that hinders
autonomous vehicles’ understanding of traffic statute laws.
For example, traffic statute laws in Japan have the follow-
ing text. “(Safe Driving Obligations) Article 70 The driver
of a vehicle, etc. shall operate its equipment, including but
1 https://waymo.com/
not limited to its steering wheel and brakes, in a consistent
manner and shall drive the vehicle, etc. at a speed and in a
manner that pose no hazard to others taking into considera-
tion such situations as roads, traffic and the vehicle, etc.”
(Japanese Law Translation) Such consistent operation of
equipment and speed depend on the situation. Therefore,
we claim that the traffic statute laws are too ambiguous for
autonomous vehicle systems. To realize safe autonomous
vehicles, it is necessary to make the vehicles understand
the qualitative aspects of traffic statute laws. We regard the
qualitative perspective as important because human beings
understand laws qualitatively, not quantitatively. Therefore,
qualitative information is important for mutual communi-
cation between autonomous vehicle systems and human
beings.
Under the circumstances, we aim to develop a safe au-
tonomous vehicle system based on the following qualita-
tive knowledge base.
• Qualitative spatial representation for sensory data
• Traffic statute law and case law for decision making
• Driving action model
As described in this paper, we report a pilot study for safe
autonomous vehicle system. First, we explain the future
prospects of the our autonomous vehicle systems. Second,
we described driving actions using qualitative representa-
tion. The described action model will help us to clarify
what knowledge should be described and how to align
above qualitative knowledge bases for safe autonomous
driving system.
Future Prospects of Our Autonomous Vehicle
Overview of the Proposed System
Figure 1 presents an overview of the proposed autono-
mous vehicle system. Features of the system include a

qualitative knowledge base. The system senses the external
environment using sensors, maps, and communications
among vehicles in the cognition phase. The collected data
are then interpreted to qualitative spatial representations
such as “One pedestrian is standing diagonally forward
right. A traffic signal is in front of the car.” In the decision
phase, the autonomous vehicle systems determine the driv-
ing action based on traffic statute law and case law. We
divide the traffic law into statute law and case law because
of the granularity of the information. We describe related
details in section “Traffic Statute law and Case Law”. The
system also predicts risks of traffic environments based on
collected data in cognition phase and then determines the
actions. The system chooses actions based on the driving
action model. The model is built in a goal-oriented manner.
Therefore, the system chooses its actions rationally.
The key notion of the proposed system includes a quali-
tative knowledge base for communication between the
autonomous vehicle system and human beings. Therefore,
the system is useful not only for autonomous vehicle sys-
tems but also as a training system for novice drivers or
drivers who have caused accidents. The system ascertains
the rationale of driving actions according to such a
knowledge base.
Knowledge Base for the Proposed System
Qualitative Spatial Representation of Sensory Data
To represent the data from external environment, we
employ the method Qualitative Spatial Reasoning and Rep-
resentation (QSR) (Cohn, 2008), which is a method to rep-
resent spatial information in a qualitative manner, making
it comprehensible even for human beings. We will also
employ it for connection to other qualitative knowledge
bases.
Traffic Statute law and Case Law
We will transform traffic statute law to a machine-
readable but qualitative form. We regard traffic law as
comprising statute law and case law.
Followings are the reasons why we use case law. Other
autonomous vehicle systems are also developed by consid-
ering safe driving according to traffic statute laws. Howev-
er, other systems merely handle limited information related
to specific traffic statute laws such as speed limits and traf-
fic signs. In the traffic statute laws, some ambiguous texts
exist. For example, Japanese traffic statute laws include the
following text. “(Safe Driving Obligations) Article 70 The
driver of a vehicle, etc. shall operate its equipment, includ-
ing but not limited to its steering wheel and brakes, in a
consistent manner and shall drive the vehicle, etc. at a
speed and in a manner that pose no hazard to others taking
into consideration such situations as roads, traffic and the
vehicle, etc.” (Japanese Law Translation) We aim to pro-
cess not only information such as traffic signs and speed
limitations but also other ambiguous information in the
statute law. To handle such ambiguous information, we use
case law because of its granularity. The statute laws in-
clude abstract information, but case law includes more
fine-granular information.
However, case laws may be contradictory with each oth-
er and part of them has too concrete information for auton-
omous vehicles. To avoid the issue, we employed a book in
which law experts categorize traffic accidents into 338
categories, published by Hanrei Times Co., Ltd. (Hanrei
Times, 2014) Figure 2 shows the spatial information and
Autonomous Driving
Advice for Driving
Driving by Human
Cognition
3.5m
20.1m
4.2m
6.0m6.2m
Sensor data
Inter-vehicle communication
Map
Pattern recognition
DecisionPotential hazard
prediction
Keeping traffic laws
Driving Action
Knowledge BaseSpatial Information• One pedestrian stands diagonally forward right.
• One car stops diagonally forward left.
• Cross-walk is in front of me.• There are downtown near here, etc.
Traffic rules• Traffic laws• Case laws
Ontology based Action Knowledge• Action for turning right• Action for prevention of
collision, etc.
QSR* Traffic rules
Driving Action
Knowledge
Data transition using KB
*QSR:Qualitative Spatial Representation and Reasoning
Figure 1: Future prospect of autonomous vehicle system
from the perspective of safe driving.

comparative negligence ratio of one category in the book.
The category was built based on case laws. Moreover,
these categories are used in court in Japan as complement
information to judge. Thus, the use of this book's categori-
zation enables us to avoid contradictory case laws and
make decisions considering the information more concrete
than statute laws.
Case law presents advantages over statute law in terms
of its frequency of revision. Statute laws are revised once
every one or two years, but case law is produced continual-
ly. If the autonomous vehicle system can accommodate the
case law, then the system can follow recent situations.
Driving Action Model for Autonomous Vehicle
The driving action model describes the action that driv-
ers including human and autonomous vehicles choose and
take in a certain situation. It also provides structured
knowledge related to driving. The model is built in a man-
ner such that the driver cannot cause a traffic accident if
the driver obeys the model. The model will be connected to
QSR and traffic statute laws.
For this study, we used Convincing Human Action Ra-
tionalized Model (CHARM) (Nishimura et al., 2013) as
driving action model. We use knowledge explication
methodology (Nishimura et al., 2017) as the method of
knowledge building. Knowledge explication methodology
helps a knowledge holder build structured knowledge. It is
suited to the domain which presents knowledge depending
on a specific site or person. Regarding driving knowledge,
it also depends on the driver, so we choose knowledge ex-
plication methodology.
Built-up Driving Action Model
We accumulated “turning right at the intersection”
knowledge because it is a risky action according to statis-
tics (ITARDA, 2014). The Institute for Traffic Accident
Research and Data Analysis reported that the number of
accidents involving vehicles and humans (including pedes-
trians and bicycles) is not decreasing compared to the
numbers of other accidents such as accidents among cars
and self-inflicted injury accidents. Accidents involving
vehicles and humans also entail deadly risks. Zhao et al.
also specifically examine the driver behavior at rounda-
bouts, a type of intersection (Zhao et al., 2017). Therefore,
we specifically examined building the knowledge to reduce
accidents between vehicles and humans. The origin of the
knowledge is an unsafe incident database provided by To-
kyo University of Agriculture and Technology (TUAT).
We chose 36 incidents that occurred when the car turned
right at an intersection with pedestrians or bicycles.
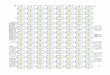
Figure 3 portrays all knowledge of “turning right at an
intersection.” It is structured in a goal-oriented manner.
Each oval node shows an action which should be taken for
Turn right at an intersection
Prevent collision with
something
Prevent collision with standing
things
Prevent collision with moving things
Stop
way
way
way
Go to the intersection
Go away from the
intersection
Increase the
speed
Return the steering wheel
way
Accident pattern 14
risk
Accident pattern 12
Accident pattern 20
Decrease the speed
Turn the steering
wheel to right
way
Operate hand-brake
Operate foot-brake
way using foot-brake
way using hand-brake
Collide to something
safe
way of collision
Accident pattern 1
risk
Accident pattern 2
Condition: likely to collide
Inform
way
Turn on winkers
way
Move to a location where a car which turns right at
opposite side of the crossroad can look at
Get information(Recognize)
Look locations of
moving things
way of direct-viewing
See far away
Look states of moving
things
Keep a distance from the
moving things
way
Look states of moving objects on cross-walk
Look states of moving objects on intersection
Look states of moving objects
on road
way
Look locations of moving objects on cross-walk
Look locations of moving objects on intersection
Look locations of moving objects
on road
way
Avoid a blind
situation
way
Switch to high-beam
Condition: In dark
Look at the traffic signal
way of obeying traffic rules
Condition: the moving things obey
the traffic rules.
Condition: There is
traffic signal.
Accident pattern 135・・・ ・・・
Figure 4: Action for prevention of collisionFigure 5: Go through the intersection (go to and go away from the intersection)
Action A
Action B
Way A
Action C
Way B
Action D
Action E
Way C
Action F
Condition: A
Risk A
risk
Risk B
• These actions are operated in order from left to right.
• Both actions are necessary to achieve their goal.
• Either way is necessary to achieve the goal
Goal
Fine-granular action
Legends
• These actions can be operated independent with order.
• Both actions are necessary to achier the goal.
Figure 3: Entire driving action knowledge about turning right at an intersection.
Pedestrian started to cross a road during red signal.Car went into an intersection during blue signal.
Blue
BlueRed
Red
Red
Red
Comparative negligence ratio
At night
Main streetCrossing near car / stop on the road, going back
At residence / shopping district
Pedestrian is child / elderly
Pedestrian is toddler / handicapped
Group of pedestrians
Significant negligence
Serious negligence
No difference between driveway and sideway
Detailed description of the pattern
Figure 2: Spatial information and comparative negligence
ratio (Hanrei Times, 2014)

safe driving. The link from an upper-node to a lower-node
denotes the way to achieve the upper-node (goal action).
The lower-node and nodes connected horizontally are the
group of actions which are needed to achieve the goal ac-
tion. The ways are alternatives to achieve the same goal.
The horizontal links are classified into line and arrowhead.
The line denotes that the order of associated actions does
not matter. The arrowhead denotes that the order of the
connected actions is from left to right.
In this case, the topmost goal is “turn right.” The action
is achieved by following three actions: “prevent collision
with something” (see Figure 4), “go to the intersection”,
and “go away from the intersection” (see Figure 5). “Pre-
vent collision with something” can be interpreted as a goal
of fine-granular actions, “prevent collision with standing
things” and “prevent collision with moving things.” We
describe more details of “prevent collision with moving
things.” “Switching to high-beam” is a fine-granular action
in this tree. This action is performed in a “in dark” situa-
tion to achieve a goal, “see faraway.” In addition to that,
the risks are described in the tree. When the driver per-
forms “go to the intersection”, there are some risks de-
scribed as red rectangles (see rectangle in Figure 5). These
numbers denote an accident pattern extracted from the
book of Hanrei Times Co., Ltd. [Hanrei 2014]. This infor-
mation can be useful to choose driving actions for autono-
mous vehicle systems.
We describe a role of risks in the action model. When
modeling, one of the authors built the action model based
on unsafe-incident movies and his common sense. After
building the model, he linked the action model with acci-
dent patterns (we call it “risk” in the action model.) deter-
mined in (Hanrei Times, 2014). Thanks to the decomposi-
tion to each element of actions, it is easy to link the acci-
dent patterns with the corresponding action. On the other
hand, during operation of the system, the system checks
external situation and compares with the action model.
When the system found the action which the vehicle
should take, the system seeks risks by following the links
from the found action. If the action has high risks, then the
system seeks other action to accomplish its goal.
Prevent collision with
something
Prevent collision with standing
things
Prevent collision with moving things
Stop
way
way
Condition: likely to collide
Inform
way
Turn on winkers
way
Move to a location where a car which turns right at
opposite side of the crossroad can look at
Get information(Recognize)
Look locations of
moving things
way of direct-viewing
See far away
Look states of moving
things
Keep a distance from the
moving things
way
Look states of moving objects on cross-walk
Look states of moving objects on intersection
Look states of moving objects
on road
way
Look locations of moving objects on cross-walk
Look locations of moving objects on intersection
Look locations of moving objects
on road
way
Avoid a blind
situation
way
Switch to high-beam
Condition: In dark
Look at the traffic signal
way of obeying traffic rules
Condition: the moving things obey
the traffic rules.
Condition: There is
traffic signal.
Figure 4: Part of the action depicted in Figure 3 (Action for prevention of collision).
Go to the intersection
Go away from the
intersection
Increase the
speed
Return the steering wheel
way
Accident pattern 14
risk
Accident pattern 12
Accident pattern 20
Decrease the speed
Turn the steering
wheel to right
way
Operate hand-brake
Operate foot-brake
way using foot-brake
way using hand-brake
Collide to something
safe
way of collision
Accident pattern 1
risk
Accident pattern 2
Accident pattern 135・・・ ・・・
Figure 5: Part of the action shown in Figure 3 (go through the intersection).

How the Proposed System works
Finally, we present an image of how the proposed sys-
tem works (see Figure 6). The figure shows three situations,
(a) 6 s before the incident occurs, (b) 2 s before the inci-
dent occurs, and (c) the exact time when the incident oc-
curs. At each situation, the sensor collects the data of ex-
ternal situation and translates to qualitative representation.
At 6 s before the incident occurs, there is a traffic signal
with a blue signal turned on in front of the autonomous
vehicle. The system predicts risks using the accumulated
data and driving action knowledge including traffic statute
laws. This situation presents no risks. Therefore, the sys-
tem merely shows “no risks are detected.” The system de-
termines the actions which are hatched in the red screen in
Figure 6 according to the sensor collected data and
knowledge. The system performs the actions “go into the
intersection” at 2 s before the incident occurs. The sensor
detects “pedestrians standing on the cross-walk diagonally
forward right.” Based on its collected data, the system pre-
dicts the risk of “pedestrians running out into the road.”
Then the system chooses the actions “Care about the pe-
destrian. Turn right.” The red hatch, which is described in
the bottom of Figure 6(b), denotes actions to “prevent col-
lision” and emphasize the operation by the dense of color.
The deep red, rather than light red, denotes more important
actions. Finally, the system predicts the risk of “collision
with the pedestrians” and then determines the driving ac-
tion: “stop.”
Related work
Several studies related to this research have been con-
ducted. They are broadly divisible into two types: autono-
mous robot and autonomous vehicles with qualitative rep-
resentation.
Somani et al. presents an interface for collaborative tasks
involving a worker and an industrial robot (Somani et al.,
2013). The robot can learn the assembly plan through the
interface. The worker teaches the robot. The robot recog-
nizes the scenes before and after teaching. The robot ascer-
tains the taught plan with semantic description. Finally, the
worker and the robot can collaborate.
Rizaldi et al. also tackled the formalization of traffic
rules (Rizaldi et al., 2015). They formalize five rules from
the Vienna Convention on Road Traffic for autonomous
vehicles using first-order logic. Thereafter, they try to for-
malize the ambiguous rules, but they do not use case law to
concretize the rules.
As for modeling tasks, Erol et al., provide Hierarchical
Task Network (Erol et al., 1994a, 1994b). HTN, which is
acronym for hierarchical task network, was developed for
automatic planning. A network consists with some tasks
with their decomposition. The decomposition is done ac-
cording to satisfying constraints to accomplish its goal.
The network has primitive tasks, which is executable by
machine. We employed similar goal-oriented action model
CHARM, which is acronym for convincing human action
rationalized model (Nishimura et al., 2013). CHARM was
developed for human to understand their work processes
with goals. Modeling processes based on CHARM is like
HTN but it does not have primitive tasks so the decomposi-
tion of process is done recursively.
Decision to drive
Condition: Traffic signal is blue.Risk: No detectionActions: Decrease the speed and go to
the intersection.
-6s
Decided actions
Detected risks
Blue signal
(a) Decision making at 6 s before the incident
Decision to driveCondition: Traffic signal in front of the car is blue.
Traffic signal for pedestrians is red. Two pedestrians walk diagonally forward right of the cross-walk.
Risk: The pedestrian might run out to the road.Actions: Care about the pedestrians. Turn the
steering wheel to right.
-2s
Decided actions
Detected risks
Blue signal for car
Red signal for pedestrians
(b) Decision making at 2 s before the incident
Decision to driveCondition: Traffic signal for pedestrians
is red. The pedestrians are walking on the cross-walk.
Risk: Collision with the pedestrians.Actions: Stop to prevent the collision.
0s
Decided actions
Detected risks
Pedestrians
Red signal for pedestrians
(c) Decision making at the exact time when the incident oc-
curred
Figure 6: Image of the proposed system function.

Conclusion and Future Work
We proposed future prospects related to a safe autono-
mous vehicle system based on a qualitative knowledge
base, knowledge base requirements, and development of
the prototype. Finally, we presented an image of how the
proposed system works.
Future work will be undertaken to build a qualitative
knowledge base. Especially, we will try building qualita-
tive spatial representation for sensory data. We will also
tackle connections between the QSR and driving action
model.
Acknowledgements
This paper is partly based on results obtained from "Fu-
ture AI and Robot Technology Research and Development
Project" commissioned by the New Energy and Industrial
Technology Development Organization (NEDO).
References
Cohn, A. G., Renz, J. 2008. Chapter 13 Qualitative Spatial Repre-sentation and Reasoning, van Harmelen, F., Lifschitz, V., Porter, B. eds. Foundations of Artificial Intelligence Vol.3, Handbook of Knowledge Representation, pp.551-596.
Erol, K., Hendler, J., Nau, D. S. 1994. HTN Planning: Complexi-ty and Expressively, The Twelfth National Conference on Arti-ficial Intelligence (AAAI-94), pp. 1123-1128.
Erol, K., Hendler, J., Nau, D. S. 1994. UMCP: A Sound and Complete Procedure for Hierarchical Task-Network Planning, the Second International Conference on Artificial Intelligence Planning Systems (AIPS-94), pp. 249-254.
Institute for traffic accident research and data analysis. 2014. statistics of transportation accidents. http://www.itarda.or.jp/english/
Japanese Law Translation, Road Traffic Act. http://www.japaneselawtranslation.go.jp/law/detail/?ft=1&re=01&dn=1&x=0&y=0&co=01&ia=03&ky=%E9%81%93%E8%B7%AF%E4%BA%A4%E9%80%9A%E6%B3%95&page=11, 2017.05.18 accessed.
Nishimura, S., Kitamura, Y., Sasajima, M., Williamson, A., Ki-noshita, C., Hirao, A., Hattori, K., Mizoguchi, R. 2013. CHARM as Activity Model to Share Knowledge and Transmit Procedural Knowledge and its Application to Nursing Guide-lines Integration, Journal of Advanced Computational Intelli-gence and Intelligent Informatics, Vol.17, No. 2, pp.208-220.
Rizaldi, A., and Althoff, M. 2015. Formalising traffic rules for accountability of autonomous vehicles. 2015 IEEE 18th Inter-national Conference on Intelligent Transportation Systems (ITSC), pp. 1658-1665.
Smart Mobility Research Center, Drive recorder dataset. http://web.tuat.ac.jp/~smrc/drcenter.html, 2017.05.18 accessed (in Japanese)
Somani, N., Dean-Leon, E., Cai, C., and Knoll, A. 2013. Scene perception and recognition for human-robot co-operation. In-
ternational Conference on Image Analysis and Processing. pp. 50-59.
Special Interest Group of Civil Lawsuits about Transportation in Tokyo District Court. 2014. Scale of contributory negligence ratio for civil lawsuits about transportation. ISSN:0438-5896. Hanrei Times. (in Japanese)
Zhao, L., Ichise, R., Sasaki, Y., Liu, Z., and Yoshikawa, T. 2016. Fast Decision Making using Ontology-based Knowledge Base, 2016 IEEE Intelligent Vehicles Symposium. pp.173-178.
Zhao, M., Käthner, D., Jipp, M., Söffker, D., and Lemmer K. 2017. Modeling Driver Behavior at Roundabouts: Results from a Field Study, 2017 IEEE Intelligent Vehicles Symposium.