Embed Size (px)
Citation preview

Bài giảng Hệ thống Cơ điện tử 1
MỤC LỤC
CHƯƠNG 1: TỔNG QUAN VỀ CƠ ĐIỆN TỬ........................................................4
1.1. Các khái niệm cơ bản.......................................................................................4
1.2. Lịch sử và xu thế phát triển..............................................................................4
1.2.1. Lịch sử phát triển......................................................................................4
1.2.2. Xu thế phát triển........................................................................................8
CHƯƠNG 2: CÁC THÀNH PHẦN CƠ BẢN CỦA HỆ THỐNG CƠ ĐIỆN TỬ...10
2.1. Môđun môi trường.........................................................................................10
2.2. Môđun tập hợp...............................................................................................10
2.3. Môđun đo lường.............................................................................................10
2.4. Hệ thống kích truyền động.............................................................................11
2.5. Môđun truyền thông.......................................................................................11
2.6. Môđun xử lý...................................................................................................11
2.6.1. Đường truyền bus....................................................................................12
2.6.2. Bộ xử lý trung tâm CPU.........................................................................13
2.6.3. Bộ nhớ.....................................................................................................13
2.7. Môđun phần mềm..........................................................................................13
2.7.1. Ngôn ngữ lập trình..................................................................................13
2.7.2. Các tập lệnh.............................................................................................14
2.7.3. Lập trình..................................................................................................14
2.8. Môđun giao diện............................................................................................14
CHƯƠNG 3. CẢM BIẾN VÀ CƠ CẤU CHẤP HÀNH..........................................15
3.1. Giới thiệu về cảm biến và cơ cấu chấp hành.................................................15
3.1.1. Cảm biến.................................................................................................15
3.1.2. Cơ cấu chấp hành....................................................................................16
3.2. Đặc tính của cảm biến và cơ cấu chấp hành..................................................17
3.2.1. Dải đo......................................................................................................17
3.2.2. Độ phân giải............................................................................................17
3.2.3. Độ nhạy...................................................................................................17
3.2.4. Sai số.......................................................................................................18
3.2.5. Khả năng lặp lại......................................................................................18
3.2.6. Vùng chết................................................................................................18
3.2.7. Tính ổn định............................................................................................20
3.2.8. Thời gian đáp ứng...................................................................................20
Trang 1
Trang

Bài giảng Hệ thống Cơ điện tử 1
3.2.9. Nhiệt độ hệ thống....................................................................................20
3.3. Một số loại cảm biến thường gặp...................................................................21
3.3.1. Cảm biến dịch chuyển thẳng và quay.....................................................21
3.3.1.1. Công tắc hành trình..........................................................................21
3.3.1.2. Tia hồng ngoại.................................................................................21
3.3.1.3. Các bộ mã hóa quang học................................................................22
3.3.2. Đo lực......................................................................................................23
3.3.3. Cảm biến đo khoảng cách.......................................................................24
3.4. Cơ cấu chấp hành...........................................................................................26
3.4.1. Các động cơ điện.....................................................................................26
3.4.1.1. Động cơ DC.....................................................................................26
3.4.1.2. Động cơ AC.....................................................................................28
3.4.1.3. Động cơ bước...................................................................................29
3.4.2. Hệ thống điều khiển khí nén...................................................................32
3.4.2.1. Phần tử xử lý và điều khiển.............................................................32
3.4.2.1.1. Van đảo chiều............................................................................32
3.4.2.1.2. Van chắn...................................................................................36
3.4.2.1.3. Van tiết lưu:..............................................................................36
3.4.2.1.4. Van áp suất................................................................................38
3.4.2.2. Cơ cấu chấp hành:............................................................................38
3.4.2.2.1. Xi lanh.......................................................................................38
3.4.2.2.2. Động cơ khí nén:.......................................................................39
CHƯƠNG 4: ĐIỀU KHIỂN LOGIC KHẢ LẬP TRÌNH PLC................................40
4.1. Giới thiệu PLC...............................................................................................40
4.1.1. Giới thiệu chung......................................................................................40
4.1.2. Hình dáng bên ngoài...............................................................................40
4.1.3. Các thành viên họ S7-200.......................................................................43
4.1.4. Modul mở rộng.......................................................................................45
4.2. Đấu nối PLC và modul mở rộng....................................................................48
4.2.1. PLC sử dụng nguồn nuôi một chiều.......................................................48
4.2.2. PLC sử dụng nguồn nuôi xoay chiều......................................................50
4.2.3. Đấu nối modul mở rộng..........................................................................52
4.3. Ngôn ngữ lập trình.........................................................................................56
4.3.1. Cách thực hiện chương trình...................................................................56
4.3.2. Cấu trúc chương trình.............................................................................57
4.3.3. Phương pháp lập trình.............................................................................58
Trang 2

Bài giảng Hệ thống Cơ điện tử 1
4.4. Một số lệnh cơ bản.........................................................................................59
4.4.1. Lệnh vào ra.............................................................................................59
4.4.2. Các lệnh ghi/xóa giá trị cho tiếp điểm....................................................60
4.4.3. Các lệnh logic đại số Boolean.................................................................60
4.4.4. Các lệnh tiếp điểm đặc biệt.....................................................................64
4.4.5. Các lệnh so sánh......................................................................................65
4.4.6. Lệnh nhảy và lệnh gọi chương trình con................................................67
4.4.7. Các lệnh can thiệp vào thời gian vòng quét............................................69
4.4.8. Các lệnh điều khiển Timer......................................................................69
4.4.9. Các lệnh điều khiển Counter...................................................................73
4.4.10. Các lênh số học.....................................................................................76
4.4.11. Lệnh tăng, giảm một đơn vị và lệnh đảo giá trị thanh ghi....................80
4.4.12. Các lệnh dịch chuyển nội dung ô nhớ...................................................84
4.5. Soạn thảo chương trình và chương trình mô phỏng.......................................85
4.5.1. Soạn thảo chương trình...........................................................................85
4.5.2. Chương trình mô phỏng..........................................................................85
Trang 3

Bài giảng Hệ thống Cơ điện tử 1
CHƯƠNG 1: TỔNG QUAN VỀ CƠ ĐIỆN TỬ.
1.1. Các khái niệm cơ bản.
Khái niệm Cơ điện tử được mở ra từ định nghĩa ban đầu của công ty
Yasakawa Electric. Trong các tài liệu xin bảo hộ thương hiệu của mình. Yasakawa
định nghĩa Cơ điện tử như sau:
“Thuật ngữ mechatronics được tạo thành bởi “mecha” trong mechanics và
“tronics” trong electronics. Nói cách khác, các công nghệ và sản phẩm được phát
triển sẽ ngày càng được kết hợp chặt chẽ và hữu cơ thành phần điện tử vào trong
các cơ cấu và rất khó có thể chỉ ra ranh giới giữa chúng.”
Khái niệm cơ điện tử tiếp tục phát triển sau khi Yasakawa đưa ra định nghĩa
đầu tiên. Một định nghĩa khác về cơ điện tử thường hay được nói tới do Harashima,
Tomizuko và Fukada đưa ra năm 1996 như sau:
“Cơ điện tử là sự kết hợp chặt chẽ của kỹ thuật cơ khí với điện tử và điều
khiển máy tính thông minh trong thiết kế, chế tạo các sản phẩm và quy trình công
nghiệp.”
Năm 1997, Shetty và Kolk lại quan niệm:
“Cơ điện tử là một phương pháp luận được dùng để thiết kế tối ưu các sản
phẩm cơ điện.”
Và gần đây, Bolton lại đề xuất định nghĩa:
“Một hệ cơ điện tử không chỉ là sự kết hợp chặt chẽ các hệ cơ khí, điện và nó
cũng không chỉ đơn thuần là một hệ điều khiển. Nó là sự tích hợp đầy đủ các hệ
trên.”
1.2. Lịch sử và xu thế phát triển.
1.2.1. Lịch sử phát triển.
Quá trình phát triển CĐT trên thế giới chính thức bắt đầu từ năm 1969 với sự
ra đời thuật ngữ Cơ điện tử, sản phẩm CĐT chỉ là sự kết hợp giữa cơ khí và điện tử.
Sau đó, với sự phát triển của CNTT, các bộ vi xử lý đã được tích hợp vào hệ thống
Cơ điện tử.
Về đào tạo cơ điện tử trên thế giới:
Năm 1983 Viện kỹ thuật Nhật Bản – Singapore đã đưa vào khóa đào tạo kỹ
thuật cơ điện tử (mechatronics engineering) chương trình đào tạo 2 năm để đào tạo
lại kỹ sư cơ khí.
Khóa giảng đầu tiên mang tên “Mechatronics” cho kỹ sư và học viên cao học
được thực hiện ở trường đại học Landcaster trong năm 1984/1985. Kể từ đó khóa
Trang 4

Bài giảng Hệ thống Cơ điện tử 1
đào tạo về Cơ điện tử phát triển mạnh ở tất cả các nước công nghiệp phát triển và
đang phát triển.
Những năm đầu thập kỷ 90 của thế kỷ XX, 4 trường đại học Bách khoa của
Singapore có chương trình đào tạo 3 năm chính quy kỹ sư cơ điện tử.
Ở Úc cũng đã có các khóa đào tạo và cấp bằng kỹ sư theo chuyên ngành Cơ
điện tử từ những năm đầu 90. Tiếp theo không lâu là các trường đại học Curtin và
New South Weles.
Ở châu Âu, từ năm 1980 đã có các hoạt động có liên quan đến đào tạo Cơ
điện tử, nhưng khóa học chính thức về cơ điện tử trong trường đại học thì chỉ bắt
đầu từ chương trình một năm Cao học tại trường đại học Katholieke (Bỉ) trong năm
1986. Đến năm 1989 trường này đã mở ngành đào tạo Cơ điện tử.
Trong năm 1990 một loạt các trường đại học ở CHLB Đức, Đan Mạch, Hà
Lan,…(Châu Âu) đưa Cơ điện tử vào giảng dạy. Từ năm 1992 đến 1996 Liên minh
châu Âu đã tài trợ thực hiện dự án TEMOUS đưa khóa học Cơ điện tử vào giảng
dạy tại các khoa Cơ khí của các trường đại học: TU Brno, CTU, TU Plzeo,
University College Dublin, Loughborough University of Technology,…..
Các trường đại học ở Anh giảng dạy Cơ điện tử bắt đầu từ trường Lancaster,
tiếp theo là trường đại học London, Survey, Dundee, Hull, Brunel, Loughborough,
Manchester và Leeds.
Ở Bắc Mỹ mặc dù có rất nhiều trường hoạt động trong lĩnh vực Cơ điện tử,
nhưng cho đến năm 1995 vẫn chưa xuất hiện những khóa giảng dạy mang tên “Cơ
điện tử”. Đến nay hầu như các trường đại học kỹ thuật của Mỹ đều đã có khoa này.
Tính đến năm 1999 trên thế giới đã có khoảng 90 trường đại học và viện nghiên cứu
có đào tạo giảng dạy và nghiên cứu về cơ điện tử
Về đào tạo cơ điện tử ở Việt Nam:
Hiện nay một số Trường ĐH tại Việt Nam đã Đào tạo chuyên ngành Cơ điện
tử hệ Đại học:
- Từ năm 1997 ĐHBK TP Hồ Chí Minh mở Chuyên ngành Cơ điện tử tại
khoa Cơ khí.
- Từ năm 2001 ĐHBK Đà nẵng mở chuyên ngành Cơ điện tử tại khoa Cơ
khí với số lượng 58 sinh viên. Bộ môn Cơ điện tử cũng được thành lập vào năm
2003.
- Năm 2001 ĐH SPKT TP HCM cũng mở ngành Cơ điện tử khóa đầu tiên.
- Bắt đầu từ năm 2004, ĐH Công nghệ thuộc ĐH Quốc gia Hà nội mở
Chuyên ngành Cơ điện tử tại Khoa Cơ kỹ thuật với số lượng ban đầu khoảng 20
SV/năm.
Trang 5

Bài giảng Hệ thống Cơ điện tử 1
Ngoài ra các trường sau cũng đã mở chuyên ngành Cơ điện tử đào tạo ĐH
- Viện Công nghệ Châu Á (AIT) tại Hà nội
- ĐH Cần thơ
- Một số trường ĐH Dân lập Phương Đông, DL Thăng Long vv...
- Đào tạo Cao học: Đào tạo Cao học trong nước tại trường ĐH Bách khoa
Hà Nội. ĐH BK Hà Nội hợp tác với ĐH Tổng hợp kỹ thuật Hannover
(CHLB Đức) và ĐH Tổng hợp kỹ thuật Dresden (CHLB Đức) mở lớp
Cao học quốc tế.
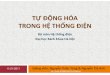
Hình 1.1. Cơ điện tử: sự tích hợp hữu cơ của nhiều ngành khác nhau
Trang 6
Điện tửMô hình hóaLý thuyết hệ thốngCông nghệ tự động hóaPhần mềmTrí tuệ nhân tạo
Vi điện tửĐiện tử công suất
Cảm biếnCơ cấu chấp hành
Các thành phần cơ khíMáyCơ khí chính xác
Công
nghệ
thông tinCƠ ĐIỆN TỬ

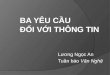
Hệ cơ khí thuần túy
Hệ cơ khí với truyền động điện
Hệ cơ khí với đkhiển tự động
Hệ cơ khí với:
+ Điều khiển điện tử tương tự
+ Điều khiển tuần tự
Hệ cơ khí với:
+ Điều khiển liên tục số
+ Điều khiển tuần tự số
Hệ cơ khí với:+ Tích hợp: cơ khí và phần cứng điện tử.+ Các chức năng xác định bằng phần mềm+ Các hiệu quả tổng hợp
Động cơ một chiều 1870Động cơ xoay chiều 1889
RơleThủy lực, khí nén, máy khuyếch đại điệnBộ điều khiển PI 1930
Tranziton 1948Thyristor 1955
Máy tính số 1955Máy tính xử lý 1959Phần mềm thời gian thực 1966Máy tính 1971Tự động hóa dựa trên số hóa 1975
Vi điều khiển 1978Máy tính cá nhân 1980Hệ thống xử lý busCơ cấu truyền động mới, cảm biếnSự tích hợp các thành phần
<1920
1920
1935
1955
1975
1985
Gia tăng các
thành phần điện
Tăng dần điều
khiển tự động
dùng máy tính xử
lý và quá trình
thu nhỏ cấu trúc.
Gia tăng điều
khiển tự động
Tăng dần sự tích
hợp giữa các quy
trình với máy
tính.
Động cơ hơi nước 1860Máy phát điện 1870
Bơm tuần hoàn 1880Động cơ đốt cháy 1880
Máy đánh chữMáy công cụ
Máy đánh chữ bằng điện
Tuabin hơi nướcMáy bay
Thang máy điều khiển bằng điện
Dụng cụ cắtRobot công nghiệp
Nhà máy công nghiệpCác ổ đĩa
Robot di độngCIM
Ổ đệm từ trườngĐiều khiển máy tự động
Bài giảng Hệ thống Cơ điện tử 1
Bảng 1.1. Lịch sử phát triển của các hệ cơ học, điện, điện tử.
Trang 7

Bài giảng Hệ thống Cơ điện tử 1
1.2.2. Xu thế phát triển.
Năm 70 của thế kỷ 20, các sản phẩm cơ điện tử chủ yếu tích hợp phần cơ khí
với công nghệ điều khiển trợ lực (servo) tạo nên các sản phẩm như cửa tự động,
máy tự động bán hàng, máy ảnh tự động chỉnh tiêu cự (focus). Đến những năm 80,
khi công nghệ thông tin được hình thành thì các chip vi xử lý đã được nhúng vào
trong các hệ thống cơ khí để nâng cao các công năng hệ thống. Lúc này các máy
công cụ điều khiển số và robot đã trở nên hoàn hảo hơn, các ô tô có phần điều khiển
số… đã được sử dụng rộng rãi. Trong lĩnh vực quân sự, các hệ thống vũ khí thông
minh có điều khiển số ra đời và phát triển mạnh mẽ.
Vào những năm 90, khi đưa các sản phẩm cơ điện tử vào công nghệ truyền
thông đã tạo nên các sản phẩm có khả năng kết nối mạng. Cũng trong giai đoạn này,
các vi cảm biến và cơ cấu chấp hành siêu nhỏ được phát triển và ứng dụng trong
nhiều sản phẩm như các hệ thống vi cơ điện tử. Có thể nói rằng, chức năng của các
máy móc và hệ thống cơ kỹ thuật hiện nay phụ thuộc chủ yếu vào phần mềm (có thể
là một thuật toán, mạng nơron, hệ mờ) trong máy tính của sản phẩm. Riêng điều này
đã là một sự khác biệt về chất so với các sản phẩm cơ điện cách đây 25-30 năm.
Xu thế phát triển của cơ điện tử là ngày càng tích hợp trong nó nhiều công
nghệ cao hơn, sản phẩm ngày càng "thông minh" hơn đồng thời kích thước cũng
ngày càng nhỏ đi.
Chiến lược phát triển khoa học và công nghệ Việt Nam đến năm 2010 đã xác
định một số lĩnh vực cơ điện tử chuyên sâu:
- Robot làm việc trong các môi trường độc hại, nguy hiểm, an ninh quốc
phòng, một số dây chuyền công nghiệp công nghệ cao
- Các sản phẩm CĐT trong một số lĩnh vực cơ khí trọng điểm như máy
công cụ, máy động lực, thiết bị điện-điện tử, cơ khí ôtô và các thiết bị đo
lường điều khiển...
- Nghiên cứu vi cơ điện tử và nano cơ điện tử...
STT Thiết kế truyền thống Thiết kế Cơ điện tử
Các thành phần thêm vào Tích hợp các thành phần (phần cứng)
1.
2.
3.
4.
To lớn
Kết cấu phức tạp
Vấn đề về dây dẫn
Các thành phần kết nối
Nhỏ gọn
Kết cấu đơn giản
Truyền thông không dây hoặc bus
Các thiết bị tự trị
Điều khiển đơn giản Tích hợp bởi xử lý thông tin
5. Cấu trúc cứng nhắc Cấu trúc mềm dẻo, phản hồi
Trang 8

Bài giảng Hệ thống Cơ điện tử 1
6.
7.
8.
9.
10.
Điều khiển truyền thẳng, tuyến tính
Độ chính xác nhờ dung sai hẹp
Các đại lượng không đo được thay
đổi tùy tiện
Theo dõi đơn giản
Khả năng cố định
Điều khiển phản hồi khả lập trình
Độ chính xác nhờ đo lường và phản hồi
Điều khiển các đại lượng không đo được
bằng cách ước lượng
Giám sát với chẩn đoán lỗi
Khả năng tự học
Bảng 1.2. Các thuộc tính của thiết kế truyền thống và thiết kế Cơ điện tử.
Trang 9

Bài giảng Hệ thống Cơ điện tử 1
CHƯƠNG 2: CÁC THÀNH PHẦN CƠ BẢN CỦA HỆ THỐNG CƠ
ĐIỆN TỬ
2.1. Môđun môi trường.
Môđun môi trường liên quan đến các thông số bên ngoài như phạm vi nhiệt
độ, các yếu tố tải trọng…sẽ tác động đến hoạt động của sản phẩm đồng bộ. Trong
các thiết kế tổng thể, các tham số này thiết lập loạt điều kiện biên mà sản phẩm phải
tồn tại và hoạt động trong đó.
Môđun môi trường hình thành từ điều kiện hoặc các tiêu chuẩn, quy tắc thực
tế và chức năng thực hiện của hệ thống. Môđun môi trường vừa đóng vai trò đầu
vào, vừa đóng vai trò đầu ra của cả hệ thống buộc hệ thống có các chức năng thực
hiện, phục vụ một mục đích cụ thể nào đó.
Môđun môi trường không hiện diện trong sản phẩm cơ điện tử, tuy nhiên vì
cơ điện tử liên quan cả đến việc thiết kế sản phẩm nên trong nghiên cứu sản phẩm
cơ điện tử, môđun môi trường cần được quan tâm đúng mức.
2.2. Môđun tập hợp.
Môđun tập hợp là toàn bộ hệ thống cơ khí, thể hiện kết cấu hình dáng cơ sở
các sản phẩm. Nó bao gồm chi tiết, cụm cơ khí, trong đó đặc biệt là các khung bệ
lắp ráp cho các môđun khác, các chi tiết sử dụng làm vật liên kết, vật trung gian
ghép nối…Mỗi một sản phẩm có một cách thể hiện hình dáng khác nhau, liên quan
đến mục đích sử dụng sản phẩm. Thường các chi tiết thành phần được thiết kế và
chế tạo, sau đó được lắp ráp theo bản vẽ lắp ghép. Cũng như các sản phẩm cơ khí
khác, sản phẩm cơ điện tử cần có một hình dáng mang tính thẩm mỹ.
2.3. Môđun đo lường.
Môđun đo lường là hệ thống được sử dụng rất phổ biến trong các sản phẩm
cơ điện tử và thường được cấu tạo từ 3 thành phần:
Hình 2.1. Hệ thống đo lường và các thành phần.
Cảm biến: Cảm nhận đại lượng đang được đo bằng cách sinh tại đầu ra của
nó một tín hiệu tương ứng.
Gia công tín hiệu: Đây là khâu thu thập, gia công tín hiệu sau các chuyển đổi
sơ cấp. Tín hiệu từ cảm biến của một hệ thống đo thường được xử lý theo một
Trang 10
Hiển thịCảm biến Gia công tín hiêu
Cơ khí
Đại lượng đang
được đo
Giá trị đại
lượng

Bài giảng Hệ thống Cơ điện tử 1
phương pháp để phù hợp với giai đoạn hoạt động tiếp theo. Tín hiệu có thể được
khuếch đại lên, loại nhiễu, chỉnh lưu, chuyển đổi từ tín hiệu số sang tương tự và
ngược lại…
Hệ thống hiển thị: Nơi tín hiệu ra từ bộ gia công tín hiệu được thể hiện dưới
dạng con số (hiển thị số) hoặc dạng biểu đồ (hiển thị tương tự).
2.4. Hệ thống kích truyền động.
Hệ thống kích truyền động là thành phần của sản phẩm cơ điện tử, thực hiện
chuyển đổi đầu ra từ môđun xử lý thành các hành động điều khiển trên một máy
móc hoặc thiết bị.
Phần này sẽ được tìm hiểu kỹ ở chương 3.
2.5. Môđun truyền thông.
Trong sản xuất, chế tạo với các thiết bị có sự điều khiển, để giữ được nhịp
sản xuất giữa các thiết bị, giữa chúng cần có sự trao đổi thông tin. Các thiết bị có
thể gửi và đọc thông tin theo những cách khác nhau.
Sự trao đổi, truyền thông tin, dữ liệu giữa các máy tính tùy theo phạm vi sử
dụng được yêu cầu có thể là:
Điều khiển trung tâm: là sử dụng một máy tính trung tâm để điều khiển toàn
bộ dây chuyền. Trong trường hợp này, nếu máy tính trung tâm có sự cố, toàn bộ dây
chuyền sẽ ngừng hoạt động. Đây là dạng điều khiển những năm 1970.
Hệ điều khiển phân cấp: Các máy tính thực hiện công việc thường nhật bị
giám sát bởi các máy tính có vai trò quyết định lớn hơn. Công việc được chia cho
các máy tính theo chức năng của chúng (chuyên môn hóa).
Hệ thống điều khiển phân quyền: Các máy tính được thực hiện công việc
tương tự nhau. Trường hợp có sự cố hoặc một máy quá tải, công việc có thể được
chuyển sang máy khác. Công việc được trải ra tất cả các máy do vậy mỗi máy cần
truy cập được tất cả các máy trong hệ thống.
2.6. Môđun xử lý.
Môđun xử lý, xử lý thông tin do môđun giao diện và môđun đo lường cung
cấp. Thành phần chính của môđun này là bộ điều khiển. Ngày nay các bộ vi xử lý
đóng vai trò quan trọng trong các bộ điều khiển.
Bộ vi xử lý được chia thành 3 vùng:
- Bộ xử lý trung tâm (CPU) nhận biết và thực hiện các lệnh của chương
trình.
- Giao diện nhập-xuất để quản lý và truyền thông giữa bộ xử lý và thế giới
bên ngoài.
- Bộ nhớ để lưu giữ chương trình và dữ liệu.
Trang 11

Bài giảng Hệ thống Cơ điện tử 1
Tín hiệu số di chuyển từ khu vực này sang khu vực khác dọc theo đường
truyền bus. Bus là hệ thống dây nối để truyền dữ liệu từ bộ phận này đến bộ phận
khác trong máy tính. Nói một cách ví von, bus giống như con đường cao tốc, càng
rộng càng truyền được nhiều dữ liệu đi với tốc độ cao.
Dữ liệu liên quan đến chức năng xử lý của CPU được truyền bởi đường
truyền dữ liệu (data bus). Thông tin về địa chỉ của một vị trí xác định trên bộ nhớ để
truy cập các dữ liệu lưu được tải bởi bus địa chỉ (address bus). Những tín hiệu liên
quan đến hành động điều khiển được tải bởi bus điều khiển (control bus).
2.6.1. Đường truyền bus.
Bus dữ liệu (data bus): Dùng để mang thông tin giữa CPU và bộ nhớ cũng
như giữa CPU và các thiết bị nhập xuất. Mỗi dây trong bus truyền một tín hiệu nhị
phân 0 hoặc 1. Như vậy một bus 4 dây đang truyền từ 1010. Các bit được truyền
như sau:
Từ Dây bus
0 (bit thấp) Dây bus dữ liệu đầu tiên
1 Dây bus dữ liệu thứ 2
0 Dây bus dữ liệu thứ 3
1 (bít cao) Dây bus dữ liệu thứ 4
Kích thước của bus, được hiểu như độ rộng của đường cao tốc, là yếu tố
quan trọng quyết định lượng dữ liệu được chuyển đi mỗi lần. Ví dụ: bus 4 bit, 8 bit,
16 bit, 32 bit… có thể truyền từng đó dữ liệu một lần.
Nếu một bus dữ liệu có chiều dài 4 bit, số lượng các giá trị sẽ là 2 4 = 16. Bộ
vi xử lý 4 bit ngày nay hay sử dụng cho đồ chơi, máy giặt. Loại phổ thông hay dùng
cho các hệ điều khiển nhất là loại 8, 16, 32 và 64 bit.
Bus địa chỉ (address bus): Thông tin về địa chỉ của một vị trí xác định trên
bộ nhớ. Khi một địa chỉ cụ thể được chọn, thì chỉ mỗi vị trí này được mở thông với
CPU. Hầu hết các máy tính nhỏ có từ 16 đến 32 đường địa chỉ và có khả năng truy
xuất 2n vị trí nhớ. Một bus địa chỉ 16 bit có khả năng truy xuất 216 = 65536 = 64K vị
trí nhớ. Một bus địa chỉ 20 bit có khả năng truy xuất 1M vị trí nhớ, một bus địa chỉ
32 bit có khả năng truy xuất đến 4G vị trí nhớ. Bộ nhớ càng lớn chứa được nhiều dữ
liệu và sử dụng được các chương trình lớn hơn, phức tạp hơn.
Trang 12

Bài giảng Hệ thống Cơ điện tử 1
Bus điều khiển (control bus): là một hỗn hợp các tín hiệu, mỗi một tín hiệu
có một vai trò riêng trong việc điều khiển có trật tự hoạt động của hệ thống. Qua
bus điều khiển tín hiệu được gởi để đồng bộ các thành phần riêng lẻ.
2.6.2. Bộ xử lý trung tâm CPU.
CPU quản lý tất cả các hoạt động và thực hiện tất cả các thao tác trên dữ liệu.
Hầu hết các CPU chỉ bao gồm một tập các mạch logic thực hiện liên tục hai thao
tác: tìm nạp lệnh và thực thi lệnh. CPU có khả năng hiểu và thực thi các lệnh dựa
trên một tập các mã nhị phân, mỗi một mã nhị phân biểu thị một thao tác đơn giản.
các lệnh này thường là các lệnh số học (cộng, trừ, nhân, chia), các lệnh logic (AND,
OR, NOT…), các lệnh di chuyển dữ liệu hay các lệnh rẽ nhánh được biểu thị bởi
một tập các mã nhị phân và được gọi là tập lệnh.
2.6.3. Bộ nhớ.
Bộ nhớ ROM (Read Only Memory): là bộ nhớ chứa các dữ liệu vĩnh viễn.
Các con ROM được lập trình trong lúc các mạch này được chế tạo. Các dữ liệu chỉ
có thể đọc được và sử dụng cho các chương trình cố định.
Bộ nhớ EPROM (Erasable and Programable): Các chip sử dụng loại bộ nhớ
này có thể xóa và lập trình lại được.
Bộ nhớ RAM (Random Access Memory): được gọi là bộ nhớ truy cập ngẫu
nhiên, nó có nhiệm vụ lưu dữ liệu tạm thời đang thực hiện, nó có thể đọc và ghi dữ
liệu vào. Toàn bộ dữ liệu của bộ nhớ RAM sẽ bị mất nếu mất nguồn cung cấp điện.
2.7. Môđun phần mềm.
Các môđun phần mềm được xây dựng trên cơ sở sử dụng các ngôn ngữ lập
trình để lập thuật toán phù hợp theo nhiệm vụ của các thiết bị ngoại vi được điều
khiển. Mục đích sao cho bộ xử lý hiểu, sau đó xử lý và đưa ra tín hiệu điều khiển
phù hợp mục tiêu đề ra. Để môđun phần mềm tương thích với bộ vi xử lý, chúng ta
phải tương thích với mô hình lập trình của CPU tương ứng.
2.7.1. Ngôn ngữ lập trình.
Các thông tin vào buộc bộ vi xử lý thực hiện một hành động cụ thể được gọi
là các lệnh (instruction), tập hợp các lệnh mà bộ vi xử lý nhận biết gọi là bộ lệnh
(instruction set). Dạng thức của bộ lệnh phụ thuộc vào bộ vi xử lý có liên quan.
Loạt các lệnh cần thiết để thực hiện một công việc cụ thể nào đó ta gọi là một
chương trình (program).
Bộ xử lý làm việc với hệ nhị phân. Các chương trình viết theo hệ nhị phân
được gọi là mã máy. Viết chương trình theo dạng này đòi hỏi kỹ thật cao và thường
bị mắc lỗi nhiều. Một ngôn ngữ thường được sử dụng là hợp ngữ (Assembly
language). Tuy nhiên trình hợp ngữ vẫn phải chuyển thành mã máy nếu muốn bộ xử
Trang 13

Bài giảng Hệ thống Cơ điện tử 1
lý hiểu được chương trình trên. Sự chuyển đổi này có thể thực hiện thủ công khi sử
dụng tài liệu của nhà sản xuất. Tuy nhiên, thường có các chương trình máy tính thực
hiện chuyển đổi này gọi là chương trình dịch hợp ngữ (assembler programs). Bên
cạnh đó ta còn dùng các ngôn ngữ bậc cao để lập trình như: BASIC, C, C++,
FORTRAN, PASCAL…Tất cả những ngôn ngữ này đều phải chuyển sang ngôn
ngữ máy thì bộ vi xử lý mới có thể sử dụng được.
2.7.2. Các tập lệnh.
Tập lệnh (instruction set) là danh sách từ khóa mô tả tất cả các hoạt động
hoặc các tác vụ mà đơn vị xử lý trung tâm (CPU) có thể thực hiện được. Các bộ vi
xử lý khác nhau có các lệnh khác nhau nhưng nhìn chung các lệnh có thể phân chia
thành những nhóm lệnh sau:
- Chuyển dữ liệu.
- Thực hiện số học.
- Thực hiện logic.
- Điều khiển chương trình.
2.7.3. Lập trình.
Thường phương pháp lập trình được sử dụng để phát triển chương trình gồm
các bước sau:
- Xác định vấn đề, bắt đầu từ việc làm rõ chương trình phải thực hiện
những chức năng gì, yêu cầu nhập xuất, dung lượng nhớ…
- Quyết định thuật toán sử dụng. Thuật toán là tuần tự các bước xác định
một phương pháp giải quyết vấn đề.
- Thể hiện thuật toán thông qua lưu đồ. Biểu diễn các biểu tượng chuẩn để
thể hiện lưu đồ. Mỗi một bước của thuật toán thể hiện bằng một hoặc hơn
một biểu tượng và nối với nhau bởi đường thể hiện luồng chương trình.
- Chuyển đổi lưu đồ thuật toán thành câu lệnh mà bộ xử lý có thể thực
hiện. Tức là viết các câu lệnh theo ngôn ngữ lập trình.
- Chạy thử và sửa lỗi chương trình.
2.8. Môđun giao diện.
Môđun giao diện là một phần quan trọng trong hệ thống Cơ điện tử. Các thiết
bị ngoại vi (bộ cảm biến, bảng điều khiển) thường không được nối trực tiếp với hệ
thống vi xử lý do thiếu tương thích về mức và dạng tín hiệu. Do vậy cần phải có
một mạch ghép nối gọi là mạch giao diện để nối thiết bị ngoại vi và bộ vi xử lý.
Trang 14
Thiết bị ngoại vi Mạch giao diện Bộ vi xử lý

Bài giảng Hệ thống Cơ điện tử 1
Hình 2.2. Giao diện.
CHƯƠNG 3. CẢM BIẾN VÀ CƠ CẤU CHẤP HÀNH
3.1. Giới thiệu về cảm biến và cơ cấu chấp hành.
Cảm biến và cơ cấu chấp hành là hai thành phần cơ bản của mọi hệ cơ điện
tử. Một hệ cơ điện tử điển hình như trên hình 3.1 gồm một khối cảm biến, một khối
điều khiển và một khối cơ cấu chấp hành.
Khối cảm biến có thể đơn giản là một cảm biến đơn lẻ hoặc có thể gồm các
thành phần bổ sung như bộ lọc, bộ khuếch đại, bộ điều chế và các bộ biến đổi tín
hiệu khác.
Khối điều khiển nhận thông tin từ khối cảm biến, đưa ra quyết định dựa trên
thuật toán điều khiển và các lệnh tới khối cơ cấu chấp hành.
Khối cơ cấu chấp hành bao gồm cơ cấu chấp hành có thể thêm một bộ nguồn
và một cơ cấu ghép nối.
Hình 3.1. Hệ Cơ điện tử thường gặp.
3.1.1. Cảm biến.
Cảm biến là một thiết bị mà khi có một hiện tượng vật lý tác động vào (nhiệt
độ, lực, ánh sáng,…) sẽ tạo ra tín hiệu đầu ra (điện, cơ học, từ,…) tỷ lệ.
Cảm biến được phân loại thành 2 dạng tương tự hoặc số dựa trên dạng tín
hiệu đầu ra. Cảm biến tương tự cung cấp tín hiệu liên tục tỷ lệ với tham số cần đo
và cần sự biến đổi tương tự thành số trước khi chuyển cho bộ điều khiển số. Trong
khi đó, cảm biến số cung cấp đầu ra số có thể trực tiếp ghép nối với bộ điều khiển
số.
Trang 15
Khoái caûm bieán
Khoái cô caáu chaáp haønh
BOÄ ÑIEÀU KHIEÅNHEÄ THOÁNG
ÑÖÔÏCÑIEÀU
KHIEÅN

Bài giảng Hệ thống Cơ điện tử 1
Một số loại cảm biến thường gặp:
Cảm biến dịch chuyển thẳng và quay.
Cảm biến gia tốc.
Cảm biến lực.
Cảm biến đo mômen và công suất.
Cảm biến lưu lượng.
Cảm biến nhiệt độ.
Cảm biến đo khoảng cách.
Các cảm biến nhận biết ánh sáng, hình ảnh và nhận dạng.
Tiêu chuẩn lựa chọn.
Dải đo: Chênh lệch giữa giá trị lớn nhất và giá trị nhỏ nhất của tham số
cần đo.
Độ phân giải: Thay đổi nhỏ nhất mà cảm biến có thể phân biệt được.
Độ chính xác: Sai khác giữa giá trị đo được và giá trị thực.
Tính chính xác: Khả năng lặp lại kết quả đo với độ chính xác cho trước.
Độ nhạy: Là tỷ số của thay đổi đầu ra trên một đơn vị thay đổi của đầu
vào.
Thời gian đáp ứng: Độ trễ giữa đầu vào và đầu ra.
Nhiệt độ hoạt động: Khoảng nhiệt độ mà tại đó cảm biến hoạt động được.
Vùng chết: Dải đầu vào mà trong dải đó sẽ không có đầu ra.
Việc chọn cảm biến thỏa mãn tất cả các đặc tính kỹ thuật trên là không thực
tế. Ví dụ việc tìm cảm biến vị trí với độ phân giải m trong khoảng một mét gần
như không đáp ứng được với hầu hết các loại cảm biến. Do vậy tùy theo hệ Cơ điện
tử thiết kế mà ta lựa chọn cảm biến cho phù hợp.
Khi các hệ số chức năng trên được thỏa mãn, người ta có thể đưa ra một
danh sách cảm biến. Sự lựa chọn cuối cùng sẽ phụ thuộc vào kích cỡ, độ tin cậy, độ
bền vững, khả năng bảo dưỡng và giá thành cảm biến.
3.1.2. Cơ cấu chấp hành.
Về cơ bản, các cơ cấu chấp hành là phần phía sau một hệ cơ điện tử, nhận
lệnh điều khiển (hầu hết là dạng tín hiệu điện) và gây ra một sự thay đổi trong hệ
vật lý bằng cách tạo lực, chuyển động, nhiệt, dòng chảy…Thông thường các cơ cấu
chấp hành được sử dụng kết hợp với nguồn nuôi và một cơ cấu ghép nối như trên
hình 3.2.
Trang 16

Bài giảng Hệ thống Cơ điện tử 1
Hình 3.2. Thiết bị chấp hành thông thường.
Phân loại:
Cơ cấu chấp hành có thể phân loại dựa trên dạng năng lượng.Về cơ bản có
các dạng: điện, điện cơ, điện từ, thủy lực và khí nén.
Cơ cấu chấp hành cũng có thể phân loại thành dạng nhị phân và liên tục dựa
trên số lượng đầu ra trạng thái ổn định. Một rơle với hai trạng thái ổn định là một ví
dụ điển hình của cơ cấu chấp hành dạng nhị phân. Tương tự, một động cơ bước là
một ví dụ điển hình cho cơ cấu chấp hành dạng liên tục.
3.2. Đặc tính của cảm biến và cơ cấu chấp hành
3.2.1. Dải đo.
Chênh lệch giữa giá trị lớn nhất và giá trị nhỏ nhất của tham số cần đo. Dải
đo thường được quy định bởi nhà sản xuất cảm biến.
3.2.2. Độ phân giải.
Độ phân giải của cảm biến là khoảng nhỏ nhất của đầu vào mà cảm biến có
thể đo được. Độ phân giải cũng có thể được hiểu là số đếm nhỏ nhất của cảm biến.
Ví dụ một bộ mã hóa 1024 ppr (xung/vòng) có độ phân giải là:
3.2.3. Độ nhạy.
Độ nhạy của cảm biến được định nghĩa là tỷ số giữa thay đổi đầu ra trên một
đơn vị thay đổi đầu vào. Độ nhạy của cảm biến thường liên quan mật thiết đến độ
phân giải. Một cảm biến có đặc tính tuyến tính thì có độ nhạy không đổi trên toàn
bộ dải đầu vào. Các cảm biến có đặc tính phi tuyến thì có độ nhạy tăng hoặc giảm
khi đầu vào thay đổi như hình 3.3.
Trang 17

Bài giảng Hệ thống Cơ điện tử 1
Hình 3.3. Độ nhạy của cảm biến.
3.2.4. Sai số.
Sai số là độ sai khác giữa giá trị đo được và giá trị thực của đầu vào. Có hai
loại sai số là sai số hệ thống và sai số ngẫu nhiên. Sai số hệ thống có ở tất cả các
phép đo được thực hiện với cảm biến. Các dạng của sai số hệ thống:
Sai số lệch không: là dạng phổ biến của sai số hệ thống khi giá trị đầu
ra khác không với đầu vào bằng không.
Sai số tải: do thêm cảm biến vào hệ đo làm thay đổi hệ.
Sai số do độ nhạy của cảm biến thay đổi không giống như mong
muốn.
3.2.5. Khả năng lặp lại.
Khả năng lặp lại là khả năng thu được đầu ra giống nhau với đầu vào giống
nhau của một cảm biến. Sai số ngẫu nhiên làm giảm khả năng lặp lại. Sai số ngẫu
nhiên có thể khắc phục bằng cách lấy trung bình của một số phép đo. Nhiễu cũng
làm giảm khả năng lặp lại.
3.2.6. Vùng chết.
Vùng chết là một vùng đầu vào gần điểm không mà đầu ra vẫn giữ giá trị
không. Khi đầu vào dịch ra khỏi vùng chết thì đầu ra sẽ thay đổi theo đầu vào (hình
3.4).
Trang 18

Bài giảng Hệ thống Cơ điện tử 1
Hình 3.4. Vùng chết.
Vùng chết thường được dùng trong bộ ổn nhiệt gia đình và các bộ điều khiển
quá trình.
Hình 3.5. Vùng chết của bộ ổn nhiêt.
Ví dụ về bộ ổn nhiệt gia đình được mô tả trên hình 3.5.
Khi nhiệt độ đạt điểm đặt (giá trị mong muốn) trên bộ ổn nhiệt, đầu ra vẫn
giữ trạng thái tắt. Ngay khi nhiệt độ trong phòng tăng lên tới giá trị điểm đặt cộng
một nửa giá trị vùng chết thì đầu ra hệ thống làm mát sẽ bật hoàn toàn.
Khi phòng lạnh đi, đầu ra sẽ giữ trạng thái bật đến khi nhiệt độ trong phòng
đạt điểm đặt trừ đi một nửa giá trị vùng chết, đầu ra hệ thống làm lạnh sẽ tắt hoàn
toàn.
Trang 19
đầu ra
đầu vào
Vùng chết
Tuyến tính
thực
Vùng chết
điểm đặt nhiệt độ
đầu ra
bật
tắt

Bài giảng Hệ thống Cơ điện tử 1
3.2.7. Tính ổn định.
Thuật ngữ tính ổn định có nhiều định nghĩa và cách dùng khác nhau nhưng
định nghĩa phổ biến nhất là định nghĩa liên quan đến cân bằng. Một hệ cân bằng sẽ
giữ được trạng thái không đổi khi không có nhiễu tác động. Một hệ ổn định sẽ trở
lại trạng thái cân bằng nếu có nhiễu nhỏ làm dịch chuyển hệ thống khỏi trạng thái
ban đầu. Một hệ không ổn định sẽ không trở lại vị trí cân bằng và thường dịch
chuyển xa vị trí cân bằng.
Hình 3.6. Tính ổn định của hệ thống.
Hình 3.6 cho thấy ba điều kiện ổn định với một hệ đơn giản gồm: quả bóng
và đồi. Trong mỗi trường hợp, vị trí cân bằng được xác định dễ dàng – trên đỉnh đồi
hoặc dưới đáy. Trong trường hợp ổn định, một dịch chuyển nhỏ của quả bóng ra
khỏi vị trí cân bằng, nó sẽ quay trở về vị trí cân bằng, có thể sau một vài dao động.
Trong trường hợp thứ ba, trường hợp không có ma sát làm quả bóng dao động liên
tục quanh vị trí cân bằng sau khi có một chuyển động nhỏ. Trường hợp đặc biệt này
gọi là biên ổn định do hệ thống không bao giờ thực sự trở lại vị trí cân bằng.
Hầu hết các cảm biến và cơ cấu chấp hành vốn đã ổn định. Tuy nhiên, việc
thêm các hệ điều khiển chủ động có thể làm hệ các thiết bị ổn định trở thành không
ổn định. Cần phân tích và kiểm tra cẩn thận để đảm bảo rằng một hệ cơ điện tử hoạt
động trong trạng thái ổn định.
3.2.8. Thời gian đáp ứng.
Là thời gian trễ giữa đầu vào và đầu ra. Cảm biến càng tốt thì thời gian đáp
ứng càng nhỏ.
3.2.9. Nhiệt độ hệ thống.
Là khoảng nhiệt độ mà tại đó cảm biến còn có thể hoạt động được.
Trang 20
Không ổn định Ổn định Biên giới ổn định
Có ma sát Không ma sát

Bài giảng Hệ thống Cơ điện tử 1
3.3. Một số loại cảm biến thường gặp.
3.3.1. Cảm biến dịch chuyển thẳng và quay.
Hầu hết các chuyển động phổ biến nhất trong các hệ thống cơ khí là chuyển
động thằng dọc theo một trục cố định và quay một góc quanh trục cố định. Những
chuyển động phức tạp hơn thường được tạo ra bởi việc kết hợp những chuyển động
đơn giản đó. Trong phần này chúng ta sẽ giới thiệu tóm tắt một số công nghệ sẵn có
để đo các chuyển động thẳng và chuyển động quay quanh một trục.
3.3.1.1. Công tắc hành trình.
Loại đơn giản nhất của cảm biến dịch chuyển là một công tắc hành trình, nó
gởi trả một bit thông tin: chạm hoặc không chạm. Một công tắc hành trình điển hình
bao gồm một đòn bẩy, khi nó được tác động nó sẽ tạo ra một tiếp xúc cơ khí bên
trong công tắc, từ đó tạo ra một mạch điện kín (hình 3.7). Có thể sử dụng công tắc
này như là những cảm biến va chạm.
Hình 3.7. Công tắc hình trình.
3.3.1.2. Tia hồng ngoại.
Tia hồng ngoại có thể được sử dụng để đo các dịch chuyển thẳng hoặc dịch
chuyển quay. Thông thường các điôt phát tia hồng ngoại (LED) hoặc là đèn phát
quang (Thiết bị phát) được dùng như một nguồn phát sáng và một thiết bị cảm nhận
hồng ngoại được dùng để phát hiện tia sáng (thiết bị thu).
Nếu thiết bị phát và thiết bị thu đặt đối diện nhau thì chúng có thể được sử
dụng như một bộ ngắt tia để phát hiện bất kỳ vật gì đi qua chúng. Thiết bị này được
gọi là thiết bị ngắt quang (hình 3.8).
Hình 3.8. Bộ ngắt quang dẫn QVA11234
Trang 21

Bài giảng Hệ thống Cơ điện tử 1
Nếu thiết bị phát và thu di chuyển tự do theo đường thẳng nối chúng, thì
cường độ của tín hiệu nhận được có thể được sử dụng để đo khoảng cách giữa
chúng. Tuy nhiên thiết bị thu tia hồng ngoại cũng có thể nhạy cảm với cả ánh sáng
của môi trường xung quanh. Do vậy trong quá trình thiết kế ta phải để ý đến hiện
tượng này để làm cho cảm biến chống nhiễu một cách tốt nhất.
Một bộ phát sáng và bộ dò đặt cùng hướng về một phía có thể đo thô khoảng
cách tới một bề mặt gần đó nhờ cường độ của tia phản xạ sau khi va vào bề mặt.
Thiết bị đó được gọi là thiết bị phản xạ quang (hình 3.9). Một cảm biến như vậy có
thể được dùng cho các robot di động để phát hiện các vật cản ở một khoảng cách
cho trước.
Hình 3.9. Cảm biến phản xạ quang bán dẫn QRB1114.
Các thiết bị ngắt quang và các thiết bị phản xạ quang có thể được đóng gói
sẵn hoặc chế tạo riêng biệt từ một LED hồng ngoại và một điôt quang hoặc tranzito
quang, sau khi chắc chắn rằng thiết bị thu nhạy cảm với bước sóng sinh ra bởi LED
phát hồng ngoại.
3.3.1.3. Các bộ mã hóa quang học.
Một bộ mã hóa quang sử dụng một bộ ngắt quang để biến chuyển động thành
một chuỗi xung điện. Những chuỗi xung này “mã hóa” chuyển động và các xung
được đếm hoặc “được giải mã” bởi một mạch điện để đưa ra số đo dịch chuyển.
Chuyển động có thể là thẳng hoặc quay, nhưng chúng ta tập trung vào các bộ mã
hóa quang quay thông thường.
Có hai bộ mã hóa quang quay cơ bản là: mã hóa tương đối và bộ mã hóa
tuyệt đối. Trong bộ mã hóa tương đối, một đĩa (đĩa chia vạch) được gắn vào một
trục quay tròn giữa hai bộ ngắt quang học (hình 3.10). Vì vậy khi trục quay thì các
vạch này sẽ ngăn hoặc cho tia sáng hồng ngoại tới thiết bị dò quang học. Các dãy
xung thu được từ các bộ dò này có tần số tương ứng với vận tốc góc của đĩa. Những
Trang 22

Bài giảng Hệ thống Cơ điện tử 1
tín hiệu này được ký hiệu là A và B. Hai tín hiệu A và B này lệch pha nhau ¼ chu
kỳ.
Hình 3.10. Bộ mã hóa tương đối.
Thông qua việc đếm số lượng các xung và số lượng các vạch trên đĩa đã biết,
ta có thể đo được tốc độ quay của trục. Hướng quay được xác định dựa trên quan hệ
pha của các chuỗi xung A và B. Ví dụ A tăng khi B = 1 ta có thể nói rằng chuyển
động của đĩa là chuyển động quay ngược chiều kim đồng hồ. Ngược lại A tăng khi
B = 0 thì chuyển động của đĩa là chuyển động quay cùng chiều kim đồng hồ.
3.3.2. Đo lực.
Lực là một đại lượng vectơ, được định nghĩa như là tác nhân gây ra gia tốc
hoặc phản ứng cụ thể của một vật. Trong phần này chúng ta sẽ giới thiệu các
phương pháp được ứng dụng để xác định độ lớn của những lực này.
Nhận xét chung: Nếu các lực tác dụng lên một vật mà không sinh ra gia tốc,
chúng phải có một dạng hệ lực cân bằng. Hệ này được xem như là một hệ cân bằng
tĩnh. Các lực tác dụng lên vật có thể chia làm hai loại: nội lực do các phần tử riêng
biệt của vật tác dụng lẫn nhau và ngoại lực.
Hình 3.11. Vật bị kéo dọc trục (a), nén dọc trục (b), biến dạng (c).
Trang 23
(a) (b) (c)

Bài giảng Hệ thống Cơ điện tử 1
Trong kỹ thuật đo hiện có, một nhóm được gọi là cảm biến tải. Nhìn chung
cảm biến tải gồm một khung cứng, một môi trường để đo các lực đặt vào và một
đầu đo. Các cảm biến tải được sử dụng để đo các lực lớn, tĩnh hoặc biến thiên chậm
với độ lệch rất ít và tương đối chính xác. Có thể áp dụng các phương pháp khác
nhau để đo các lực tùy thuộc vào thiết kế của cảm biến tải. Ví dụ hình 3.12 minh
họa cảm biến tải thủy lực. Cảm biến tải dùng để đo các lực tương đối lớn với giá
thành thấp. Cảm biến tải thủy lực dùng một khung rất cứng với một khoang trong
chứa đầy chất lỏng. Khi có tải, áp lực của dầu tăng, và một đầu đo chính xác sẽ đọc
giá trị này.
Hình 3.12. Cảm biến tải thủy lực.
3.3.3. Cảm biến đo khoảng cách.
Cảm biến này được sử dụng để đo khoảng cách từ một điểm tham chiếu tới
một đối tượng. Rất nhiều công nghệ khác nhau đã được ứng dụng để phát triển các
loại cảm biến này, tiêu biểu là ánh sáng/quang học, hình ảnh, vi sóng và siêu âm.
Cảm biến đo khoảng cách có thể được phân làm hai loại: Tiếp xúc và không tiếp
xúc. Ta chủ yếu đề cập đến loại không tiếp xúc.
Cảm biến đo khoảng cách không tiếp xúc là loại cảm biến đo khoảng cách
thực từ điểm tham chiếu tới một đối tượng không qua tiếp xúc vật lý. Có thể được
phân làm hai loại là: chủ động (phát một số dạng năng lượng vào khu vực cần quan
tâm) và bị động (dựa trên năng lượng phát ra từ các đối tượng trong khu vực quan
tâm).
Với các loại cảm biến chủ động (phản xạ), khoảng cách đo hiệu quả phụ
thuộc không chỉ vào mức năng lượng phát ra mà còn phụ thuộc vào các đặc tính sau
của đối tượng:
Diện tích tiết diện ngang: xác định lượng năng lượng phát ra tác động
vào đối tượng.
Hệ số phản xạ: xác định lượng năng lượng truyền tới được phản xạ so với
lượng năng lượng bị hấp thụ hoặc xuyên qua.
Độ tập trung: xác định khả năng phân bố lại của năng lượng phản xạ.
Trang 24

Bài giảng Hệ thống Cơ điện tử 1
Rất nhiều cảm biến không tiếp xúc hoạt động dựa trên hiện tượng truyền
sóng. Sóng được phát ra tại một điểm tham chiếu, khoảng cách được xác định bằng
cách đo thời gian truyền từ điểm tham chiếu tới vật hoặc suy giảm của cường độ khi
sóng truyền tới vật và quay trở lại điểm tham chiếu. Thời gian truyền sóng thường
được đo bằng phương pháp thời gian truyền (TOF_Time of flight).
Phương pháp thời gian truyền:
Phương pháp thời gian truyền được minh họa trong hình 3.13 và 3.14. Một
bộ phát sóng (phát ra vài chu kỳ) được phát ra và phản xạ từ vật về bộ thu có vị trí
gần bộ phát. Bộ phát và bộ thu có thể được tích hợp trên cùng một cảm biến. Bộ thu
cũng có thể được gắn trên vật. TOF là thời gian từ khi bắt đầu phát đến khi có tín
hiệu trả về. Khoảng cách được xác định bằng công thức d = c.TOF/2 (khi bộ phát và
bộ thu ở cùng một vị trí ) và d = c.TOF (khi bộ thu được gắn trên vật).
Hình 3.13. Sóng được phát và phản xạ lại từ vật
Hình 3.14. Đĩnh nghĩa thời gian truyền sóng.
Độ chính xác của phương pháp này có thể được tăng lên bằng phương pháp
dò biên độ cực đại (hình 3.15)
Trang 25

Bài giảng Hệ thống Cơ điện tử 1
Hình 3.15. TOF tính theo biên độ lớn nhất của tín hiệu phản xạ
Sai số của phương pháp thời gian truyền có thể do các nguyên nhân sau:
Sự thay đổi tốc độ truyền sóng: đặc biệt là với các hệ thống âm thanh
ta phải chú ý tới sự thay đổi này. Vì tốc độ âm thanh chịu ảnh hưởng
rõ rệt của nhiệt độ và độ ẩm.
Không xác định được chính xác thời gian đến của xung phản xạ.
Sai số của mạch định thời sử dụng để đo thời gian truyền.
Sự tương tác của sóng tới bề mặt đối tượng cần đo khoảng cách: Khi
ánh sáng, âm thanh hoặc sóng radio tác động vào đối tượng, tín hiệu
phản hồi đo được chỉ thể hiện một phần nhỏ của tín hiệu ban đầu.
Năng lượng còn lại phản xạ theo các hướng khác nhau và có thể được
hấp thụ hoặc xuyên qua đối tượng, phụ thuộc vào đặc tính đối tượng
và góc tới của chùm sóng.
3.4. Cơ cấu chấp hành.
3.4.1. Các động cơ điện.
3.4.1.1. Động cơ DC.
Trên hình 3.16 khi cho điện áp một chiều U vào hai chổi điện A và B, trong
dây quấn phần ứng có dòng điện chịu lực tác dụng tương hổ lên nhau tạo nên
momen tác dụng lên rôto, làm rôto quay. Chiều lực tác dụng được xác định theo qui
tắc bàn tay trái (hình 3.16a).
Trang 26

Bài giảng Hệ thống Cơ điện tử 1
Hình 3.16. Nguyên lý làm việc của động cơ một chiều.
Khi phần ứng quay được nữa vòng, vị trí thanh dẫn ab, cd đổi chỗ nhau (hình
3.16b), nhờ có phiến góp đổi chiều dòng điện, nên dòng điện một chiều biến đổi
thành dòng điện xoay chiều đưa vào dây quấn phần ứng, giữ cho chiều lực tác dụng
không đổi, do đó lực tác dụng lên rôto cũng theo một chiều nhất định, đảm bảo
động cơ có chiều quay không đổi.
ĐIỀU CHỈNH TỐC ĐỘ:
Ứng với mỗi tải khác nhau ta cần có tốc độ khác nhau. Vì vậy để phù hợp
với tải, cần phải điều chỉnh tốc độ động cơ lúc có tải.
Ta có phương trình điện áp ở mạch phần ứng là:
U = Eư + RưIư
Eư = U - RưIư
Thay trị số Eư = KE n ta có phương trình tốc độ là:
n =
Nhìn vào phương trình trên, ta thấy rằng muốn điều chỉnh tốc độ ta có các
phương pháp sau:
a. Mắc điện trở điều chỉnh vào mạch phần ứng.
Khi mắt thêm điện trở phụ vào mạch phần ứng, điện trở Rư tăng lên đặc tính
cơ dốc xuống, tốc độ động cơ giảm dần. Do dòng điện phần ứng lớn nên tổn hao
công suất trên điện trở điều chỉnh lớn. Phương pháp này chỉ sử dụng ở động cơ
công suất nhỏ.
b. Thay đổi điện áp U.
Dùng nguồn điện một chiều để điều chỉnh điện áp cung cấp cho động cơ.
Phương pháp này được sử dụng nhiều.
Trang 27

Bài giảng Hệ thống Cơ điện tử 1
c. Thay đổi từ thông.
Thay đổi từ thông bằng cách thay đổi dòng điện kích từ.
Khi điều chỉnh tốc độ, ta kết hợp với các phương pháp trên. Ví dụ phương
pháp thay đổi từ thông, kết hợp với phương pháp thay đổi điện áp thì phạm vi điều
chỉnh rất rộng, đây là ưu điểm lớn của động cơ điện một chiều.
3.4.1.2. Động cơ AC.
a. Động cơ không đồng bộ.
Nguyên lý làm việc:
Khi đặt điện áp xoay chiều ba pha có tần số f1 vào dây quấn stato, trong dây
quấn stato sẽ có hệ thống dòng ba pha chạy qua, dòng điện này sẽ tạo ra từ trường
quay p đôi cực, quay với tốc độ . Từ trường quay cắt các thanh dẫn của dây
quấn rôto và cảm ứng các sức điện động. Vì dây quấn rôto nối ngắn mạch, nên sức
điện động cảm ứng sẽ sinh ra dòng trong các thanh dẫn rôto. Lực tác dụng tương
hỗ giữa từ trường quay của máy với thanh dẫn mang dòng điện rôto, kéo rôto quay
theo chiều với từ trường quay với tốc độ n.
Để minh họa, ta xét từ trường quay B của stato đang quay theo chiều kim
đồng hồ với tốc độ n1 (hình 3.11).
Khi xác định chiều sức điện động
cảm ứng theo quy tắc bàn tay phải, ta căn
cứ vào chiều chuyển động tương đối của
thanh dẫn với từ trường. Nếu coi từ
trường đứng yên, thì chiều chuyển động
tương đối của thanh dẫn ngược với chiều
n1, từ đó áp dụng quy tắc bàn tay phải
xác định được chiều sức điện động như
hình vẽ.
Chiều lực điện từ xác định theo
quy tắc bàn tay trái, trùng với chiều quay
n1.
Độ chênh lệch giữa tốc độ từ trường quay và tốc độ của máy gọi là tốc độ
trượt n2:
n2 = n1 – n
Hệ số trượt của tốc độ là
S =
Trang 28
Hình 3.11. Quá trình tạo momen
quay của động cơ không đồng bộ

Bài giảng Hệ thống Cơ điện tử 1
Khi roto đứng yên (n = 0), hệ số trượt s = 1. Khi roto quay định mức s = 0,02
0,06. Tốc độ động cơ là:
n = n1 (1 - s) = vg/p
b. Động cơ đồng bộ.
Nguyên lý làm việc:
Khi cho dòng điện ba pha vào dây quấn stato, dòng điện ba pha ở dây quấn
stato sẽ sinh ra từ trường quay với tốc độ:
Nếu rôto đang đứng yên (hình 3.12), cực Nam S của rôto bị cực Bắc N stato
kéo và nó có xu hướng quay theo chiều kim
đồng hồ. Nhưng do quán tính và cực Bắc
stato quét qua nó quá nhanh, trong khi nó
chưa quay tới thì sau nữa chu kỳ nó đã đối
diện với cực Nam stato và bị đẩy lùi, nghĩa là
rôto có xu hướng quay theo chiều ngược
lại. Kết quả là moment (mở máy) trung bình
bằng không và rôto không quay được.
Tuy nhiên nếu chúng ta quay trước
rôto với tốc độ đồng bộ các cực từ rôto bị
“khóa chặt” vào cực từ stato trái dấu. Khi
không tải, từ trường stato và rôto cùng quay
với tốc độ đồng bộ n1 và trục của chúng
trùng nhau ( = 0). Lúc có tải trục từ trường
rôto đi chậm sau trục từ trường stato một góc , tải càng nặng góc càng lớn,
nhưng cả hai vẫn cùng quay với tốc độ đồng bộ n1.
3.4.1.3. Động cơ bước.
a. Giới thiệu về động cơ bước.
Động cơ bước cơ bản là một động cơ điện không có bộ phận đảo mạch
(chổi than). Thông thường động cơ bước có nhiều hơn 2 cuộn dây đóng vai trò
stator (phần tĩnh). Rotor (phần động) vẫn là một nam châm vĩnh cửu hoặc là
những khối có răng (khía) làm bằng vật liệu nhẹ có từ tính (trường hợp động cơ
bước biến từ trở). Sự đảo mạch cho dòng điện trong cuộn dây được thực hiện
bằng mạch điện điều khiển bên ngoài. Thông thường, mạch điều khiển này còn
Trang 29
Hình 3.12. Sự tạo ra momen trong
động cơ đồng bộ.

Bài giảng Hệ thống Cơ điện tử 1
có thêm chức năng điều khiển động cơ quay tới, lui hoặc giữ nguyên vị trí xác
định.
Hình 3.17. Phân biệt động cơ bước và động cơ điện thông thường.
Hình 3.18. Cấu tạo bên trong động cơ bước.
Hình 3.19. Hình dáng bên ngoài của động cơ bước.
Trang 30

Bài giảng Hệ thống Cơ điện tử 1
Động cơ bước thuộc loại động cơ đồng bộ, chúng không thể quay tự do,
liên tục mà hoạt động theo nguyên lý quay từng “bước”, mỗi bước động cơ sẽ
quay được một góc (ví dụ 1,80/bước). Một vòng quay của nó gồm nhiều bước
nối tiếp nhau. Khi kết hợp với mạch điều khiển bên ngoài, chúng có thể quay đến
và dừng lại tại một vị trí xác định một cách chính xác.
b. Các loại động cơ bước.
Dựa vào cấu tạo, ta có ba loại động cơ bước chính là: Động cơ bước nam
châm vĩnh cửu, động cơ bước biến từ trở và động cơ bước hỗn hợp (động cơ lai).
Ngoài ra còn có cách phân loại dựa vào mạch điều khiển như động cơ bước đơn
cực, lưỡng cực.
Động cơ bước nam châm vĩnh cửu.
Động cơ bước nam châm vĩnh cửu có rotor là một nam châm vĩnh cửu,
không chia thành nhiều răng, cũng có nhiều cuộn dây như loại biến từ trở. Có hai
loại thông dụng là động cơ bước đơn cực (còn gọi là độc cực – unipolar) và
lưỡng cực (bipolar).
Động cơ bước biến từ trở:
Động cơ bước biến từ trở (hay còn gọi là động cơ bước phản kháng)
không dùng nam châm vĩnh cửu để làm rotor mà dùng một khối có răng làm
bằng vật liệu nhẹ có từ tính. Phần stator là 3 đến 5 cuộn dây được nối chung với
nhau.
Hình 3.20. Động cơ biến từ trở.
Động cơ bước hỗn hợp.
Động cơ bước hỗn hợp (hay còn gọi là động cơ bước cảm ứng) kết hợp ưu
điểm của hai loại động cơ trên, nghĩa là chúng có rotor là nam châm vĩnh cửu,
có nhiều răng, stator là những cuộn dây. Động cơ hỗn hợp thông dụng là loại có
200 răng và có bước 1,80.
Trang 31

Bài giảng Hệ thống Cơ điện tử 1
Hình 3.21. Động cơ bước hỗn hợp.
Như ta thấy trong hình, rotor của động cơ bước hỗn hợp gồm hai đĩa bố trí
so le nhau. Mỗi đĩa có nhiều răng ứng với các cực.
3.4.2. Hệ thống điều khiển khí nén.
Điều khiển là quá trình của một hệ thống, trong đó dưới tác dụng của một
hay nhiều đại lượng vào, các đại lượng ra thay đổi theo một quy luật nhất định của
hệ thống đó.
Một hệ thống điều khiển bao gồm:
Trong phần này ta chỉ xét đến 2 phần: Phần tử xử lý và điều khiển và cơ cấu
chấp hành.
3.4.2.1. Phần tử xử lý và điều khiển.
3.4.2.1.1. Van đảo chiều.
Van đảo chiều có nhiệm vụ điều khiển dòng năng lượng bằng cách đóng mở
hay thay đổi vị trí các cửa van để thay đổi hướng của dòng khí nén.
a. Ký hiệu của van đảo chiều.
Trang 32
Phần tử đưa tín hiệuPhần tử xử lý và
điều khiển Cơ cấu chấp hành
- Công tắc, nút bấm.
- Công tắc hành trình.
- Cảm biến.
- Van đảo chiều.
- Van chắn.
- Van tiết lưu.
- Van áp suất.
- Phần tử khuếch đại.
- Xilanh.
- Động cơ khí nén.

Bài giảng Hệ thống Cơ điện tử 1
b. Tín hiệu tác động:
Tín hiệu tác động vào van đảo chiều có 4 loại là: tác động bằng tay, tác động
bằng cơ học, tác động bằng khí nén và tác động bằng nam châm điện.
Tín hiệu tác động từ 2 phía (đối với van đảo chiều không có vị trí ‘không’)
hay chỉ từ 1 phía (đối với van đảo chiều có vị trí ‘không’).
Tác động bằng tay:
TÊN THIẾT BỊ KÍ HIỆU
Kí hiệu nút nhấn tổng quát
Nút bấm
Tay gạt
Bàn đạp
TÊN THIẾT BỊ KÍ HIỆU
Van đảo chiều 2/2
Van đảo chiều 4/2
Van đảo chiều 5/2
Trang 33

Bài giảng Hệ thống Cơ điện tử 1
Tác động bằng khí nén:
TÊN THIẾT BỊ KÍ HIỆU
Trực tiếp bằng dòng khí nén vào
Trực tiếp bằng dòng khí nén ra
Trực tiếp bằng dòng khí nén vào với
đường kính 2 đầu nòng van khác nhau
Gián tiếp bằng dòng khí nén vào qua
van phụ trợ
Tác động bằng cơ.
TÊN THIẾT BỊ KÍ HIỆU
Đầu dò
Cữ chặn bằng con lăn, tác động 2 chiều
Cữ chặn bằng con lăn, tác động 1 chiều
Lò xo
Nút nhấn có rãnh định vị
Tác động bằng nam châm điện
TÊN THIẾT BỊ KÍ HIỆU
Trực tiếp
Trang 34

Bài giảng Hệ thống Cơ điện tử 1
Bằng nam châm điện và van phụ trợ
Tác động theo cách hướng dẫn cụ thể
c. Van đảo chiều có vị trí ‘không’.
Van đảo chiều có vị trí ‘không’ là loại van tác động bằng cơ – lò xo lên nòng
van và ký hiệu lò xo nằm ngay vị trí bên cạnh ô vuông phía bên phải của ký hiệu
van. Tác động lên phía đối diện nòng van là tín hiệu tác động bằng cơ, khí nén hay
bằng điện. Khi chưa có tín hiệu tác động, vị trí của các cửa nối được biểu diễn trong
ô vuông phía bên phải đối với van đảo chiều 2 vị trí. Còn đối với van đảo chiều 3 vị
trí thì vị trí ‘không’ nằm ở giữa.
Ví dụ: Van đảo chiều 2/2 tác động bằng nam châm điện.
Van có 2 cửa P và R, 2 vị trí 0 và 1. Tại vị trí 0, cửa P và R bị chặn. Khi cuộn
Y có điện, từ vị trí 0 van chuyển sang vị trí 1, cửa P nối với cửa R. Khi cuộn Y mất
điện, do tác động của lò xo phía đối diện, van sẽ quay trở về vị trí ban đầu.
d. Van đảo chiều không có vị trí ‘không’.
Khi không có tín hiệu tác động lên đầu nòng van nữa, thì vị trí của van vẫn
được giữ nguyên đợi tín hiệu tác động từ phía nòng van đối diện. Vị trí tác động ký
hiệu a , b, c, …
Tín hiệu tác động có thể là:
- Tác động bằng tay hay bàn đạp.
- Tác động bằng dòng khí nén điều khiển vào hay ra từ 2 phía nòng van.
- tác động trực tiềp bằng điện từ hay gián tiếp bằng dòng khí nén đi qua
van phụ trợ.
Ví dụ: Van đảo chiều 3/2 tác động bằng nam châm điện.
Trang 35
*
R 10
P
Y1
R
a b
P
Y1 Y2
A

Bài giảng Hệ thống Cơ điện tử 1
Khi cuộn Y1 có điện thì cửa P nối với cửa A, cửa R bị chặn. Khi cuộn Y2 có
điện thì cửa A nối với cửa R còn cửa P bị chặn.
3.4.2.1.2. Van chắn.
Van chắn là loại van chỉ cho dòng khí nén đi qua một chiều, chiều còn lại bị
chặn. Van chắn gồm có các loại sau:
- Van 1 chiều.
- Van Logic OR.
- Van Logic AND.
- Van xả khí nhanh.
TÊN THIẾT BỊ KÍ HIỆU
Van một chiều.
Van một chiều có tác dụng chỉ cho
dòng khí nén đi qua một chiều (từ A qua
B), chiều ngược lại bị chặn.
Van logic OR.
Khi có dòng khí nén vào từ P1 thì
cửa P2 bị chặn và cửa P1 nối với cửa A.
Ngược lại khi dòng khí nén vào P2 thì cửa
P1 bị chặn, cửa P2 nối với cửa A.
Van logic AND.
Khi có dòng khí nén vào P1 thì P1
bị chặn, và ngược lại khi có dòng khí nén
vào P2 thì P2 bị chặn. Chỉ khi nào cả P1 và
P2 có dòng khí nén vào thì mới có khí nén
qua cửa A.
Van xả khí nhanh.
Khi dòng khí nén vào cửa P, chắn
cửa R, cửa P nối với cửa A. Khi dòng khí
nén vào từ A, cửa P bị chặn, cửa A nối với
cửa R, khí được xả nhanh ra ngoài.
3.4.2.1.3. Van tiết lưu:
Van tiết lưu có nhiệm vụ thay đổi lưu lượng dòng khí nén, có nghĩa là thay
đổi vận tốc của cơ cấu chấp hành.
Trang 36
A
P R
A B
AP2P1
A
P2P1

Bài giảng Hệ thống Cơ điện tử 1
TÊN THIẾT BỊ KÍ HIỆU
Van tiết lưu có tiết diện không đổi:
Khe hở của van có tiết diện không
thay đổi, do đó lưu lượng dòng chảy không
thay đổi.
Van tiết lưu có tiết diện thay đổi:
Lưu lượng dòng chảy qua van thay
đổi được nhờ vào một vít điều chỉnh làm
thay đổi tiết diện của khe hở.
Van tiết lưu một chiều điều chỉnh
bằng tay:
Tiết diện Az thay đổi bằng cách điều
chỉnh vít bằng tay. Khi dòng khí nén từ A
sang B, lò xo đẩy màng chắn và dòng khí nén
chỉ qua tiết diên Az. Khi dòng khí nén từ B
sang A, màng chắn bị đẩy lên và dòng khí đi
qua khoảng hở giữa màng chắn và mặt tựa
màng chắn, lưu lượng không được điều
chỉnh.
Van tiết lưu một chiều điều chỉnh
bằng cữ chặn:
Nguyên lý hoạt động tương tự như
van tiết lưu một chiều điều chỉnh bằng tay.
Dòng khí nén chỉ có thể đi một chiều từ A
sang B, tùy vào vị trí của cữ chặn mà tiết
diện của khe hở của van thay đổi, làm cho
lưu lượng dòng chảy thay đổi.
Trang 37
A B
A B
A
B
A B

Bài giảng Hệ thống Cơ điện tử 1
3.4.2.1.4. Van áp suất.
TÊN THIẾT BỊ KÍ HIỆU
Van an toàn.
Bình thường khi áp suất nhỏ hơn
hoặc bằng áp suất cho phép, cửa R bị
chặn, nhưng khi áp suất lớn hơn áp suất
cho phép, cửa R mở ra, khí nén từ cửa P
theo cửa R thoát ra ngoài.
Van tràn.
Nguyên tắc họat động tương tự
như van an toàn, nhưng chỉ khác ở chỗ
là khi áp suất bằng hoặc lớn hơn áp suất
cho phép thì cửa P nối với cửa A, nối
với hệ thống điều khiển.
Van áp suất điều chỉnh từ xa :
Khi có tín hiệu áp suất tác động,
thì cửa P nối với cửa A. Tín hiệu tác
động có thể trực tiếp lên van đảo chiều,
hay tín hiệu gián tiếp qua van tràn.
3.4.2.2. Cơ cấu chấp hành:
Cơ cấu chấp hành có nhiệm vụ biến đổi năng lượng khí nén thành năng
lượng cơ học. Cơ cấu chấp hành có thể thực hiện chuyển động thẳng (xilanh) hoặc
chuyển động quay (động cơ khí nén).
Trang 38
P R
AP
P R
A
X
A
PZ

Bài giảng Hệ thống Cơ điện tử 1
3.4.2.2.1. Xi lanh.
TÊN THIẾT BỊ KÍ HIỆU
Xilanh tác dụng đơn (xilanh tác
dụng một chiều).
Áp lực khí nén chỉ tác dụng vào
một phía của xilanh, phía còn lại là do
ngoại lực hay lò xo tác dụng.
Xilanh tác dụng 2 chiều (xilanh
tác dụng kép).
Áp suất khí nén được dẫn vào 2
phía của xilanh, do yêu cầu điều khiển
mà xilanh sẽ đi vào hay đi ra tùy thuộc
vào áp lực khí nén vào phía nào.
3.4.2.2.2. Động cơ khí nén:
Động cơ khí nén có nhiệm vụ biến đổi năng lượng của khí nén thành năng
lượng cơ học (chuyển động quay).
Động cơ khí nén có những ưu điểm sau:
Trang 39
a. b.
a. Động cơ quay một chiều
b. Động cơ quay hai chiều.
Hình 3.22. Ký hiệu động cơ khí nén

Bài giảng Hệ thống Cơ điện tử 1
- Điều chỉnh được momen quay và số vòng quay.
- Số vòng quay cao và điều chỉnh vô cấp
- Không hư hỏng khi quá tải
- Giá thành bảo dưỡng thấp
Nhược điểm.
- Giá thành năng lượng cao.
- Số vòng quay thay đổi theo tải trọng.
- Gây tiếng ồn lớn khi xả khí.
CHƯƠNG 4: ĐIỀU KHIỂN LOGIC KHẢ LẬP TRÌNH PLC
4.1. Giới thiệu PLC.
4.1.1. Giới thiệu chung.
PLC viết tắt của Programmable Logic Controllers. Là thiết bị điều khiển
logic lập trình được, cho phép thực hiện linh hoạt các thuật toán điều khiển logic
thông qua một ngôn ngữ lập trình.
Sự phát triển của PLC đã đem lại nhiều thuận lợi và làm cho các thao tác
máy trở nên nhanh, nhạy, dễ dàng và tin cậy hơn. Nó có khả năng thay thế hoàn
toàn cho các phương pháp điều khiển truyền thống dùng rơle (loại thiết bị phức tạp
và cồng kềnh); khả năng điều khiển thiết bị dễ dàng và linh hoạt dựa trên việc lập
trình trên các lệnh logic cơ bản; khả năng định thời, đếm, giải quyết các vấn đề
toán học và công nghệ, khả năng tạo lập gởi đi, tiếp nhận những tín hiệu nhằm mục
đích kiểm soát sự kích hoạt hoặc đình chỉ những chức năng của máy hoặc một dây
chuyền công nghệ.
Như vậy những đặc điểm làm cho PLC có tính năng ưu việt và thích hợp
trong môi trường công nghiệp:
Khả năng kháng nhiễu rất tốt.
Cấu trúc dạng modul rất thuận tiện cho việc thiết kế, mở rộng, cải
tạo nâng cấp...
Có những modul chuyên dụng để thực hiện những chức năng đặc biệt hay
những modul truyền thông để kết nối PLC với mạng công nghiệp hoặc
mạng Internet...
Khả năng lập trình được, lập trình dễ dàng.
Trang 40
a. b.
a. Động cơ quay một chiều
b. Động cơ quay hai chiều.
Hình 3.22. Ký hiệu động cơ khí nén

Bài giảng Hệ thống Cơ điện tử 1
Yêu cầu của người lập trình không cần giỏi về kiến thức điện tử mà chỉ
cần nắm vững công nghệ sản xuất và biết chọn thiết bị thích hợp là có thể
lập trình được.
Thuộc vào hệ sản xuất linh hoạt do tính thay đổi được chương trình
hoặc thay đổi trực tiếp các thông số mà không cần thay đổi lại chương
trình.
4.1.2. Hình dáng bên ngoài.
Trang 41

Bài giảng Hệ thống Cơ điện tử 1
Hình 4.1. Hình dáng bên ngoài của một PLC
Mô tả các đèn báo trên S7-200:
SF: Đèn đỏ SF báo hiệu hệ thống bị hỏng. Đèn SF sáng lên khi PLC có
hỏng hóc.
RUN: Đèn xanh RUN chỉ PLC đang ở chế độ làm việc và thực hiện
chương được nạp vào trong PLC.
STOP: Đèn vàng STOP chỉ định rằng PLC đang ở chế độ dừng. Dừng
chương trình đang thực hiện lại.
Ix.x: Đèn xanh ở cổng vào chỉ định trạng thái tức thời của cổng Ix.x . Đèn
này báo hiệu trạng thái của tín hiệu theo giá trị logic của cổng.
Qy.y: Đèn xanh ở cổng ra báo hiệu trạng thái tức thời của cổng Qy.y. Đèn
này báo hiệu trạng thái của tín hiệu theo giá trị logic của cổng.
Trang 42

Bài giảng Hệ thống Cơ điện tử 1
Cổng truyền thông:
S7-200 sử dụng cổng truyền thông nối tiếp RS485 với phích nối 9 chân để
phục vụ cho việc ghép nối với thiết bị lập trình hoặc với các trạm PLC khác.
Chú thích:
1. Đất
2. 24 VDC
3. Truyền và nhận dữ liệu
4. Không sử dụng
5. Đất
6. 5 VDC
7. 24 VDC
8. Truyền và nhận dữ liệu
9. Không sử dụng.
Hình 4.2. Sơ đồ chân của cổng truyền thông
Ghép nối S7-200 với máy tính PC qua cổng RS232 cần có cáp nối PC/PPI
với bộ chuyển đổi RS232/RS485.
Hình 4.3. Sơ đồ kết nối giữa PLC và máy tính thông qua cáp PC/PPI
Hình 4.4. Hình dạng và kích thước của cáp PC/PPI
Trang 43

Bài giảng Hệ thống Cơ điện tử 1
Công tắc chọn chế độ làm việc cho PLC
RUN: Cho phép PLC thực hiện chương trình trong bộ nhớ, khi chương
trình gặp lỗi hoặc gặp lệnh STOP thì PLC sẽ tự động chuyển sang chế
độ STOP mặc dù công tắc vẫn ở chế độ RUN (nên quan sát trạng thái
thực tại của PLC theo đèn báo).
STOP: Khi chuyển sang chế độ STOP, dừng cưỡng bức chương trình
đang chạy, các tín hiệu ra lúc này đều về off. Ở chế độ STOP PLC cho
phép hiệu chỉnh lại chương trình hoặc nạp một chương trình mới.
TERM: cho phép máy lập trình tự quyết định chọn một trong hai chế
độ làm việc cho PLC ở RUN hoặc STOP.
Vít chỉnh định tương tự: Mỗi CPU có từ 1 đến 2 vít chỉnh định tương tự,
có thể xoay được một góc 270, dùng để thay đổi giá trị của biến sử dụng trong
chương trình.
Pin và nguồn nuôi bộ nhớ: Khi năng lượng của tụ bị cạn kiệt, nguồn pin tự
động chuyển sang trạng thái tích cực, PLC sẽ sử dụng năng lượng từ pin. Việc thay
thế này làm cho dữ liệu trong bộ nhớ không bị mất đi.
4.1.3. Các thành viên họ S7-200.
Các thông số cơ bản của các thành viên họ S7-200 được mô tả tóm tắt ở bảng
sau:
Thông số CPU221 CPU222 CPU224 CPU226 CPU226XM
Kích thước 90x80x62 90x80x62 120.5x80x62 190x80x62 190x80x62
Bộ nhớ
chương
trình
4096 bytes 4096 bytes 8912 bytes 8912 bytes 1634 bytes
Bộ nhớ
Dữ liệu
2048 bytes 2048 bytes 5120 bytes 5120 bytes 1024 bytes
Cổng vào 6 8 14 24 24
Cổng ra 4 6 10 16 16
Modul mở
rộng
0 2 Modules 7 Modules 7 Modules 7 Modules
Cổng truyền
thông
RS-485 RS-485 RS-485 RS-485 RS-485
Dự trữ bộ
nhớ (giờ)
50 50 190 190 190
Bộ định thời 256 bộ định thời: 4 bộ 1ms, 16 bộ 10 ms, 236 bộ 100ms
Các loại DC/DC/DC
AC/DC/RL
DC/DC/DC
AC/DC/RL
DC/DC/DC
AC/DC/RL
DC/DC/DC
AC/DC/RL
DC/DC/DC
AC/DC/RL
Trang 44

Bài giảng Hệ thống Cơ điện tử 1
Bộ đếm C0-C255 C0-C255 C0-C255 C0-C255 C0-C255
Bảng 4.1. Các thông số cơ bản của các thành viên họ S7-200
Bảng 4.2. Các loại CPU S7-200.
Bảng 4.3. Kích thước và trọng lượng.
Trang 45

Bài giảng Hệ thống Cơ điện tử 1
Bảng 4.4. Một số thông số kỹ thuật.
4.1.4. Modul mở rộng.
Cấu trúc modul của S7-200 tạo sự linh hoạt tối đa để giải quyết các bài toán,
nó cho phép chúng ta chọn số đầu vào ra tối ưu về mặt kinh tế. Chúng ta có thể tăng
thêm số cổng vào ra cho bằng cách nối thêm các modul mở rộng.
Các modul mở rộng này được cắm nối tiếp nhau vào bên phải CPU làm
thành một mắc xích.. Địa chỉ các đầu vào ra trên các modul mở rộng được xác định
bằng kiểu vào, ra và vị trí của modul trong mắc xích.
Trang 46

Bài giảng Hệ thống Cơ điện tử 1
Hình 4.5. Ghép nối CPU 224 với các modul mở rộng
Bảng 4.5. Các loại modul mở rộng
Bảng 4.6. Các thông số cơ bản của modul mở rộng số
Trang 47

Bài giảng Hệ thống Cơ điện tử 1
Bảng 4.6. Các loại modul mở rộng số.
Bảng 4.7. Các thông số cơ bản của các loại modul mở rộng analog.
Trang 48

Bài giảng Hệ thống Cơ điện tử 1
Hình 4.6. Kích thước của các loại PLC và modul mở rộng
4.2. Đấu nối PLC và modul mở rộng.
4.2.1. PLC sử dụng nguồn nuôi một chiều.
Hình 4.7. Cách đấu dây CPU 221 DC/DC/DC
Trang 49

Bài giảng Hệ thống Cơ điện tử 1
Hình 4.8. Cách đấu dây CPU 222 DC/DC/DC
Hình 4.9. Cách đấu dây CPU 224 DC/DC/DC
Trang 50

Bài giảng Hệ thống Cơ điện tử 1
Hình 4.10. Cách đấu dây CPU 226 DC/DC/DC
4.2.2. PLC sử dụng nguồn nuôi xoay chiều.
Hình 4.11. Cách đấu dây CPU 221 AC/DC/RELAY
Trang 51

Bài giảng Hệ thống Cơ điện tử 1
Hình 4.12. Cách đấu dây CPU 222 AC/DC/RELAY
Hình 4.13. Cách đấu dây CPU 224 AC/DC/RELAY
Trang 52

Bài giảng Hệ thống Cơ điện tử 1
Hình 4.14. Cách đấu dây CPU 226 AC/DC/RELAY
4.2.3. Đấu nối modul mở rộng.
Hình 4.15. Cách đấu modul mở rộng EM 221 Digital Input 8x24 VDC
Trang 53

Bài giảng Hệ thống Cơ điện tử 1
Hình 4.16. Cách đấu modul mở rộng EM 222 Digital Output 8
Hình 4.17. Cách đấu modul mở rộng EM 223 24VDC 4 Inputs/4 Outputs
Trang 54

Bài giảng Hệ thống Cơ điện tử 1
Hình 4.18. Cách đấu modul mở rộng EM 223 24VDC 4 Inputs/4 Relay Outputs
Hình 4.19. Cách đấu modul mở rộng EM 223 24VDC 8 Inputs/8 Outputs
Trang 55

Bài giảng Hệ thống Cơ điện tử 1
Hình 4.20. Cách đấu modul mở rộng EM 223 24VDC 8 Inputs/8 Relay Outputs
Hình 4.21. Cách đấu modul mở rộng EM 223 24VDC 16 Inputs/16 Outputs
Trang 56

Bài giảng Hệ thống Cơ điện tử 1
Hình 4.22. Cách đấu modul mở rộng EM 223 24VDC 16 Inputs/16 Relay Outputs
4.3. Ngôn ngữ lập trình.
4.3.1. Cách thực hiện chương trình.
PLC thực hiện chương trình theo chu trình lặp. Mỗi vòng lặp được gọi là
vòng quét (scan). Mỗi vòng quét được bắt đầu bằng giai đoạn đọc dữ liệu từ các
cổng vào vùng đệm ảo, tiếp theo là giai đoạn thực hiện chương trình. Trong từng
vòng quét, chương trình được thực hiện bằng lệnh đầu tiên và kết thúc tại lệnh kết
thúc. Sau giai đoạn thực hiện chương trình là giai đoạn truyền thông nội bộ và kiểm
tra lỗi. Vòng quét được kết thúc bằng giai đoạn chuyển các nội dung của bộ đệm ảo
tới các cổng ra.
Hình 4.23. Cấu trúc một vòng quét trong PLC
Trang 57

Bài giảng Hệ thống Cơ điện tử 1
Như vậy tại thời điểm thực hiện lệnh vào/ra, thông thường lệnh không thực
hiện hiện lệnh trực tiếp với cổng vào/ra mà chỉ thông qua bộ đệm ảo của cổng trong
vùng nhớ tham số. Việc truyền thông giữa bộ đệm ảo với ngoại vi do CPU quản lý.
Khi gặp lệnh vào/ra thì ngay lập tức hệ thống sẽ cho dừng mọi công việc khác, ngay
cả chương trình xử lý ngắt, để thực hiện lệnh này một cách trực tiếp với cổng
vào/ra.
Chương trình xử lý ngắt chỉ được thực hiện trong vòng quét khi xuất hiện
tính hiệu báo ngắt và có thể xảy ra ở bất cứ điểm nào trong vòng quét.
4.3.2. Cấu trúc chương trình.
Cấu trúc của một chương trình được tạo thành từ 3 thành phần cơ bản: 1
chương trình chính (main Program), có thể có một hay nhiều chương trình con
(subroutines), các chương trình con xử lý ngắt (interrupt routines) có thể có hoặc
không.
Chương trình chính bao gồm các lệnh điều khiển ứng dụng. Các lệnh này
được thực hiện tuần tự một cách liên tục, cứ mỗi vòng quét một lần. Chương trình
chính được kết thúc bằng lệnh kết thúc chương trình (MEND hoặc END).
Chương trình con là một bộ phận của chương trình. Nó có thể có hoặc
không, chỉ được thực hiện khi có lệnh gọi đến từ chương trình chính. Các chương
trình con phải được viết sau lệnh kết thúc chương trình chính (MEND hoặc END).
Các chương trình con xử lý ngắt (có thể có hoặc không) khi xảy ra sự kiện
ngắt tương ứng. Sự kiện đó có thể là sự thay đổi mức ở một đầu vào, bộ định thời
đếm đủ hay nhận được dữ liệu trên cổng truyền thông….Chương trình xử lý ngắt
cũng phải được viết sau lệnh kết thúc chương trình chính (MEND hoặc END).
Các chương trình con thường được nhóm lại thành một nhóm ngay sau
chương trình chính. Sau đó đến ngay các chương trình xử lý ngắt. Bằng cách viết
như vậy, cấu trúc chương trình được rõ ràng và thuận tiện hơn trong việc đọc
chương trình sau này. Cũng có thể tự do trộn lẫn các chương trình con và chương
trình xử lý ngắt đằng sau chương trình chính.
Trang 58

Bài giảng Hệ thống Cơ điện tử 1
Hình 4.24. Cấu trúc một chương trình của PLC
4.3.3. Phương pháp lập trình.
Lập trình cho S7 200 và các PLC khác của hãng Siemens dựa trên 3 phương
pháp cơ bản:
- Phương pháp hình thang (Ladder logic _ LAD).
- Phương pháp khối hàm (Function Block Diagram _ FBD).
- Phương pháp liệt kê câu lệnh (Statement List _ STL).
Thông thường chúng ta chỉ dùng 2 phương pháp đó là LAD và STL. Nếu
chương trình được viết theo kiểu LAD, thiết bị lập trình sẽ tự tạo theo kiểu STL
tương ứng. Ngược lại không phải mọi chương trình được viết theo kiểu STL cũng
đều có thể chuyển sang được dạng LAD.
Định nghĩa về LAD: LAD là ngôn ngữ lập trình bằng đồ họa. Nhữnh thành
phần cơ bản dùng trong LAD tương ứng với những thành phần cơ bản dùng trong
bảng mạch rơle. Trong chương trình LAD các phần tử cơ bản dùng để biểu diễn lệnh
logic như sau:
- Tiếp điểm có hai loại: Thường đóng ; thường hở
- Cuộn dây (coil):
- Hộp (box): Mô tả các hàm khác nhau, nó làm việc khi có dòng điện đưa
đến hộp. Có các nhóm hộp sau: hộp các bộ định thời, hộp các bộ đếm, hộp di
chuyển dữ liệu, hộp các hàm toán học....
Trang 59
bit
bit
bit
bit

Bài giảng Hệ thống Cơ điện tử 1
- Mạng LAD: Là đường nối các phần tử thành một mạch hoàn chỉnh, đi
từ đường nguồn bên trái sang đường nguồn bên phải. Nguồn điện có hai đường
chính, một đường bên trái thể hiện dây nóng, một đường bên phải là dây trung hòa
(neutral) hay là đường trở về nguồn cung cấp. Đường nguồn bên phải
không được thể hiện trên giao diện lập trình.
Định nghĩa về STL: Là phương pháp thể hiện chương trình dưới dạng tập
hợp các câu lệnh. Khác với hai ngôn ngữ kia là dạng đồ họa. Chính vì thế trong
STL có thể viết những chương trình mà trong hai ngôn ngữ còn lại không thể viết
được. Bởi vì nó sát với ngôn ngữ máy hơn, không bị giới hạn bởi các quy tắc đồ
họa. STL thường dành cho lập trình viên giàu kinh nghiệm.
STL có thể giải quyết được một số vấn đề không thể giải quyết dễ dàng
trong Lad và FBD, STL chỉ có thể sử dụng tập lênh SIMATIC, mọi chương trình
viết bằng LAD hay FBD đề có thể xem và sửa trong STL nhưng không phải tất cả
những chương trình viết trong STL đều có thể xem bằng LAD hay FBD.
Để tạo ra một chương trình bằng STL, người lập trình cần phải hiểu rõ
phương thức sử dụng 9 bit trong ngăn xếp (stack) logic của S7-200.
Ngăn xếp là một khối 9 bit chồng lên nhau từ S0 đến S8, nhưng tất cả các
thuật toán liên quan đến ngăn xếp đều làm việc với bit đầu tiên và bit thứ hai (S0
và S1) của ngăn xếp. Giá trị logic mới có thể được gởi hoặc nối thêm vào ngăn xếp.
Hai bit S0 và S1 phối hợp với nhau thì ngăn xếp được kéo lên một bit.
4.4. Một số lệnh cơ bản.
4.4.1. Lệnh vào ra.
STL LAD Mô tả Toán hạng
LD
A
O
Tiếp điểm thường mở sẽ được
đóng khi bit = 1.
bit: I, Q, M, SM,
T, C, V.
LDN
AN
ON
Tiếp điểm thường đóng sẽ được
mở khi bit = 1.
bit: I, Q, M, SM,
T, C, V.
LDI
AI
OI
Tiếp điểm thường mở sẽ đóng
tức thời khi bit = 1.bit: I
LDNI
AIN
OIN
Tiếp điểm thường đóng sẽ mở
tức thời khi bit = 1. bit: I
Trang 60
bit
bit
bit
bit
Sbit
n
Rbit
n
SIbit
n
RIbit
n

Bài giảng Hệ thống Cơ điện tử 1
= bitCuộn dây đầu ra ở trạng thái
ON khi có dòng điện điều khiển
đi qua.
bit: I, Q, M, SM,
T, C, V.
=I bitCuộn dây đầu ra ở trạng thái
ON tức khi có dòng điện điều
khiển đi qua.
bit: Q
4.4.2. Các lệnh ghi/xóa giá trị cho tiếp điểm.
Lệnh này dùng để đóng và ngắt các điểm gián đoạn đã được thiết kế. Khi
dòng điều khiển đến các cuộn dây thì các cuộn dây đóng hoặc mở các tiếp điểm
(hoặc một dãy các tiếp điểm).
STL LAD Mô tả Toán hạng
S bit, n
Set 1 mảng gồm n tiếp điểm,
tính từ tiếp điểm "bit"
(n<=128 tiếp điểm).
bit: I, Q, M, SM, T,
C, V
n: IB, QB, MB,
SMB, VB, AC, Hằng
số, *VD, *ACR bit, n
Reset 1 mảng gồm n tiếp
điểm, tính từ tiếp điểm "bit"
(n <= 128 tiếp điểm).
SI bit, n
Set tức thời 1 mảng gồm n
tiếp điểm, tính từ tiếp điểm
"bit" (n <= 128 tiếp điểm).bit: Q
n: IB, QB, MB,
SMB, VB, AC, Hằng
số, *VD, *ACRI bit, n
Reset tức thời 1 mảng gồm n
tiếp điểm, tính từ tiếp điểm
"bit" (n <= 128 tiếp điểm).
4.4.3. Các lệnh logic đại số Boolean.
Các lệnh này được biểu diễn trong LAD và STL được tóm tắt trong bảng sau.
Chúng sử dụng bit nhớ đặc biệt SM1.0 để thông báo về trạng thái kết quả phép tính
được thực hiện. SM1.0 là bit nhớ 0 (Có giá trị logic bằng 1 khi kết quả của phép
tính là 0)
Trang 61
bit
bit
Sn
Sbit
n
Rbit
n
SIbit
n
RIbit
n

Bài giảng Hệ thống Cơ điện tử 1
Biểu diễn trong STL
STL Mô tả Toán hạng
ANDW IN1, IN2
Lệnh thực hiện phép logic
AND giữa các bít tương
ứng của hai từ IN1 và
IN2. Kết quả được ghi lại
vào IN2.IN1: VW, T, C, IW, QW,
SMW, AC, AIW, *VD,
*AC, Hằng số.
IN2: VW, T, C, IW, QW,
SMW, AC, AIW, *VD,
*AC
ORW IN1, IN2
Lệnh thực hiện phép logic
OR giữa các bít tương ứng
của hai từ IN1 và IN2. Kết
quả được ghi lại vào IN2.
XORW IN1, IN2
Lệnh thực hiện phép logic
XOR giữa các bít tương
ứng của hai từ IN1 và
IN2. Kết quả được ghi lại
vào IN2.
ANDD IN1, IN2
Lệnh thực hiện phép logic
AND giữa các bít tương
ứng của hai từ kép IN1 và
IN2. Kết quả được ghi lại
vào IN2. IN1: VD, ID, QD, MD,
SMQ, AC, HC, *VD,
*AC, Hằng số.
IN2: VD, ID, QD, MD,
SMD, AC, *VD, *AC
ORD IN1, IN2
Lệnh thực hiện phép logic
OR giữa các bít tương ứng
của hai từ kép IN1 và IN2.
Kết quả được ghi lại vào
IN2.
XORD IN1, IN2
Lệnh thực hiện phép logic
XOR giữa các bít tương
ứng của hai từ kép IN1 và
IN2. Kết quả được ghi lại
vào IN2.
Trang 62

Bài giảng Hệ thống Cơ điện tử 1
Biểu diễn trong LAD.
LAD Mô tả Toán hạng
Lệnh thực hiện phép logic
AND giữa các bít tương ứng
của hai từ IN1 và IN2. Kết quả
được ghi lại vào OUT.
IN1: VW, T, C, IW, QW,
SMW, AC, AIW, *VD,
*AC, Hằng số.
IN2: VW, T, C, IW, QW,
SMW, AC, AIW, *VD,
*AC
OUT: VW, T, C, IW,
MW, QW, SMW, AC,
*VD, *AC
Lệnh thực hiện phép logic OR
giữa các bít tương ứng của hai
từ IN1 và IN2. Kết quả được
ghi lại vào OUT.
Lệnh thực hiện phép logic XOR
giữa các bít tương ứng của hai
từ IN1 và IN2. Kết quả được
ghi lại vào OUT.
Lệnh thực hiện phép logic
AND giữa các bít tương ứng
của hai từ kép IN1 và IN2. Kết
quả được ghi lại vào OUT.
IN1: VD, ID, QD, MD,
SMQ, AC, HC, *VD,
*AC, Hằng số.
IN2: VD, ID, QD, MD,
SMD, AC, *VD, *AC
OUT: VD, ID, QD, MD,
SMD, AC, *VD, *AC
Lệnh thực hiện phép logic OR
giữa các bít tương ứng của hai
từ kép IN1 và IN2. Kết quả
được ghi lại vào OUT.
Lệnh thực hiện phép logic XOR
giữa các bít tương ứng của hai
từ kép IN1 và IN2. Kết quả
được ghi lại vào IN2.
Trang 63

Bài giảng Hệ thống Cơ điện tử 1
Ví dụ: Viết trong LAD
Viết trong STL
NETWORK 1
LD I4.0
ANDW AC1 AC0
ORW AC1 VW100
XORW AC1 AC0
Kết quả.
Trang 64

Bài giảng Hệ thống Cơ điện tử 1
4.4.4. Các lệnh tiếp điểm đặc biệt.
Có thể dùng lệnh tiếp điểm đặc biệt để phát hiện sự chuyển tiếp trạng thái
của xung (sườn xung) và đảo lại trạng thái dòng cung cấp (giá trị của đỉnh ngăn
xếp). LAD sử dụng các tiếp điểm đặc biệt để tác động vào dòng cung cấp. Các tiếp
điểm đặc biệt không có toán hạng riêng. Vì vậy phải đặt chúng vào vị trí phía trước
của cuộn dây hoặc họp đầu ra.
Các lệnh tiếp điểm đặc biệt được biểu diễn trong LAD:
LAD Mô tả Toán hạng
Tiếp điểm đảo trạng thái của dòng cung
cấp. Nếu dòng cung cấp có tiếp điểm đảo
thì nó bị ngắt mạch, nếu không có tiếp
điểm đảo thì nó thông mạch.
Không có
Tiếp điểm chuyển đổi dương, cho phép
thông mạch trong một vòng quét khi sườn
xung điều khiển chuyển từ 0 lên 1.
Không có
Tiếp điểm chuyển đổi âm, cho phép thông
mạch trong một vòng quét khi sườn xung
điều khiển chuyển từ 1 xuống 0.
Không có
Các lệnh tiếp điểm đặc biệt được biểu diễn trong STL:
STL Mô tả Toán hạng
NOT Lệnh đảo giá trị bit đầu tiên trong ngăn xếp. Không có
EU
Lệnh nhận biết sự chuyển tiếp trạng thái từ 0 lên 1
trong một vòng quét của đỉnh ngăn xếp. Khi nhận
được sự chuyển tiếp như vậy đỉnh ngăn xếp sẽ có giá
trị bằng 1 trong một vòng quét.
Không có
ED
Lệnh nhận biết sự chuyển tiếp trạng thái từ 1 xuống 0
trong một vòng quét của đỉnh ngăn xếp. Khi nhận
được sự chuyển tiếp như vậy đỉnh ngăn xếp sẽ có giá
trị bằng 1 trong một vòng quét.
Không có
Trang 65
NOT
P
N

Bài giảng Hệ thống Cơ điện tử 1
4.4.5. Các lệnh so sánh.
LAD Mô tả Toán hạng
Lệnh so sánh giá trị của hai giá trị IN1 và IN2.Tiếp điểm đóng khi
IN1=IN2
B = Byte
I = Integer
D = Double Integer
R = Real
IN1, IN2 (Byte): IW, QW,
MW, VW, SMW, SW, LW,
AC, Constant, *VD, *AC,
*LD
IN1, IN2 (Integer): IW, QW, MW, VW, SMW, SW, LW, AC, Constant, VD, *AC, *LD
IN1, IN2 (Double Integer):
ID, QD, MD, SD, SMD,
VD, LD, AC, Constant,
*VD, *LD, *AC
IN1, IN2 (Real): ID, QD,
MD, SD, SMD, VD, LD,
AC, Constant, *VD, *LD,
*AC
Lệnh so sánh giá trị của hai giá trị IN1 và IN2.Tiếp điểm đóng khi
IN1<>IN2
B = Byte
I = Integer
D = Double Integer
R = Real
Trang 66
IN1= = BIN2
IN1= = IIN2
IN1= = DIN2
IN1= = RIN2
IN1<> BIN2
IN1<> IIN2
IN1<> DIN2
IN1<> RIN2
IN1< BIN2
IN1< IIN2

Bài giảng Hệ thống Cơ điện tử 1
Lệnh so sánh giá trị của hai giá trị IN1 và IN2.Tiếp điểm đóng khi
IN1<IN2
B = Byte
I = Integer
D = Double Integer
R = Real
Lệnh so sánh giá trị của hai giá trị IN1 và IN2.Tiếp điểm đóng khi
IN1<=IN2
B = Byte
I = Integer
D = Double Integer
R = Real
Trang 67
IN1< BIN2
IN1< IIN2
IN1< DIN2
IN1< RIN2
IN1<= BIN2
IN1<= IIN2
IN1<= DIN2
IN1<= RIN2
IN1> BIN2
IN1> IIN2
IN1> DIN2
IN1> RIN2

Bài giảng Hệ thống Cơ điện tử 1
Lệnh so sánh giá trị của hai giá trị IN1 và IN2.Tiếp điểm đóng khi
IN1>IN2
B = Byte
I = Integer
D = Double Integer
R = Real
Lệnh so sánh giá trị của hai giá trị IN1 và IN2.Tiếp điểm đóng khi
IN1>=IN2
B = Byte
I = Integer
D = Double Integer
R = Real
4.4.6. Lệnh nhảy và lệnh gọi chương trình con.
Các lệnh của chương trình, nếu không có những lệnh điều khiển riêng, sẽ
được thực hiện theo thứ tự từ trên xuống dưới trong một vòng quét. Lệnh điều khiển
chương trình cho phép thay đổi thứ tự thực hiện lệnh. Chúng cho phép chuyển thứ
tự thực hiện, đáng lẽ ra là lệnh tiếp theo, tới một lệnh bất cứ nào khác của chương
trình, trong đó nơi điều khiển chuyển đến phải được đánh dấu trước bằng một nhãn,
chỉ đích. Thuộc nhóm lệnh điều khiển chương trình gồm: lệnh nhảy, lệnh gọi
Trang 68
IN1> BIN2
IN1> IIN2
IN1> DIN2
IN1> RIN2
IN1>= BIN2
IN1>= IIN2
IN1>= DIN2
IN1>= RIN2

Bài giảng Hệ thống Cơ điện tử 1
chương trình con. Nhãn chỉ đích, hay gọi đơn giản là nhãn phải được đánh dấu
trước khi thực hiện lệnh nhảy hay lệnh gọi chương trình con.
Việc đặt nhãn cho lệnh nhảy phải nằm trong chương trình. Nhãn của chương
trình con, hoặc của chương trình xử lý ngắt được khai báo ở đầu chương trình.
Không thể dùng lệnh nhảy JMP để chuyển điều khiển từ chương trình chính vào
một nhãn bất kỳ trong chương trình con hoặc trong chương trình xử lý ngắt. Tương
tự như vậy cũng không thể từ một chương trình con hay chương trình xử lý ngắt
nhảy vào bất cứ một nhãn nào nằm ngoài các chương trình đó.
Lệnh gọi chương trình con là lệnh chuyển điều khiển đến chương trình con.
Khi chương trình con thực hiện xong các phép tính của mình thì việc điều khiển lại
được chuyển trở về lệnh tiếp theo trong chương trình chính nằm ngay sau lệnh gọi
chương trình con. Từ một chương trình con có thể gọi được một chương trình con
khác trong nó, có thể gọi như vậy nhiều nhất là 8 lần trong S7-200.
STL LAD Mô tả
JMP n
Lệnh nhảy thực hiện việc chuyển điều
khiển đến nhãn n trong một chương
trình.
LBL nLệnh khai báo nhãn n trong một
chương trình.
CALL SBR_0
Lệnh gọi chương trình con, thực hiện
phép chuyển điều khiển đến chương
trình con có nhãn là SBR_0.
CRETLệnh trở về chương trình đã gọi
chương trình con.
Ví dụ về lệnh nhảy:
Trang 69

Bài giảng Hệ thống Cơ điện tử 1
4.4.7. Các lệnh can thiệp vào thời gian vòng quét.
Gồm các lệnh: END, STOP, NOP.
Các lệnh này được dùng để kết thúc chương trình đang thực hiện, và kéo dài
khoảng thời gian của một vòng quét.
Lệnh END dùng để kết thúc chương trình chính hiện hành.
Lệnh STOP kết thúc chương trình, nó chuyển điều khiển chương trình đến
chế độ STOP. Nếu gặp lệnh STOP trong chương trình chính hoặc trong chương
trình con thì chương trình đang thực hiện sẽ được kết thúc ngay lập tức. Nếu gặp
lệnh STOP trong chương trình xử lý ngắt thì chương trình xử lý ngắt sẽ kết thúc
ngay lập tức và tất cả các tín hiệu ngắt đang chờ xử lý sau đó đều bị bỏ qua và
không thực hiện.
Lệnh rỗng NOP không có tác dụng gì trong việc thực hiện chương trình.
STL LAD Mô tả Toán hạng
END Lệnh kết thúc chương trình chính
hiện hành có điều kiện.
Không có
STOP
Lệnh STOP kết thúc chương trình
hiện hành và chuyển sang chế độ
STOP.
NOP n
Lệnh NOT không có hiệu lực trong
chương trình hiện hành. Toán hạng n
là một số nằm trong khoảng 0-255
n: từ 0 đến
255
Trang 70

Bài giảng Hệ thống Cơ điện tử 1
4.4.8. Các lệnh điều khiển Timer.
PLC S7-200 có 3 loại bộ định thời:
- Bộ đóng trễ (ON – Delay Timer) TON
- Bộ đóng trễ có nhớ (Retentive ON – Delay Timer) TONR
- Bộ ngắt trễ (OFF – Delay Timer) TOF
Ký hiệu:
LAD:
Trang 71

Bài giảng Hệ thống Cơ điện tử 1
STL: TON Txxx, PT
TONR Txxx, PT
TOF Txxx, PT
Các bộ đóng trễ và đóng trễ có nhớ bắt đầu đếm thời gian khi có đầu vào IN
có mức 1. Lúc giá trị đếm được lớn hơn hoặc bằng giá trị đặt trước tại đầu vào PT
(Preset time) thì bit trạng thái được đặt bằng 1. Điều khác nhau giữa 2 bộ đóng trễ
là:
- Bộ đóng trễ bình thường TON sẽ bị RESET (cả giá trị đang đếm lẫn bit
trạng thái đều bị xóa về 0) khi đầu vào IN bằng 0. Cũng có thể reset bộ
định thời này bằng lệnh reset.
- Bộ đóng trễ có nhớ TONR lưu lại giá trị khi đầu vào IN bằng 0 và tiếp
tục đếm nếu đầu vào IN bằng 1. Loại bộ định thời này có thể xóa giá trị
đang đếm bằng lệnh RESET.
Bộ ngắt trễ dùng để đưa giá trị đầu ra về 0 trễ một khoảng thời gian sau khi
đầu vào IN về 0. Khi đầu vào IN được đặt bằng 1 thì bit trạng thái của bộ ngắt trễ
cũng bằng 1 đồng thời giá trị đếm của nó cũng bị xóa về 0. Khi đầu vào IN về 0 bộ
định thời bắt đầu đếm và đếm cho đến khi đạt giá trị đặt trước PT. Lúc đó bit trạng
thái của bộ ngắt trễ sẽ về 0 đồng thời nó cũng ngừng đếm. Nếu đầu vào IN chỉ bằng
0 trong khoảng thời gian ngắn hơn giá trị đặt trước PT rồi quay lại bằng 1 thì trạng
thái của bộ định thời vẫn giữ nguyên bằng 1. Bộ ngắt trễ chỉ bắt đầu đếm khi có
sườn thay đổi từ 1 thành 0 ở đầu vào IN.
Trang 72

Bài giảng Hệ thống Cơ điện tử 1
Ví dụ về các loại bộ định thời và biểu đồ thời gian.
Trang 73

Bài giảng Hệ thống Cơ điện tử 1
Hình 4.25. Bộ định thời TON và biểu đồ thời gian.
Hình 4.26. Bộ định thời TONR và biểu đồ thời gian.
Trang 74

Bài giảng Hệ thống Cơ điện tử 1
Hình 4.27. Bộ định thời TOF và biểu đồ thời gian.
4.4.9. Các lệnh điều khiển Counter.
Counter là bộ đếm hiện chức năng đếm sườn xung trong S7-200. Các bộ đếm
của S7-200 được chia ra làm 3 loại: bộ đếm lên (Count Up), bộ đếm xuống (Count
Down) và loại bộ đếm có thể vừa đếm lên vừa đếm xuống (Count Up/Down).
Bộ đếm lên CTU đếm số sườn lên của tín hiệu logic đầu vào, tức là đếm số
lần thay đổi trạng thái logic từ 0 lên 1 của tín hiệu. Bộ đếm lên đếm cho giá trị tối
đa của nó (32767). Khi giá trị đếm (Cxxx) lớn hơn hoặc bằng giá trị đặt trước PV
thì bit trạng thái (Cxxx) sẽ có giá trị 1 (ON). Bộ đếm có thể bị xóa (Reset) bởi mức
1 ở đầu vào reset (R), lúc đó cả giá trị đếm lẫn bit trạng thái sẽ bị xóa về 0.
Bộ đếm xuống CTD đếm từ giá trị đặt trước (PV) mỗi khi có sườn lên ở đầu
vào. Khi giá trị đếm (Cxxx) bằng 0, bit trạng thái Cxxx bằng 1 đồng thời bộ đếm
Cxxx ngừng đếm. Mức cao ở đầu vào LD xóa bit trạng thái về 0 và tải giá trị đặt
trước PV vào giá trị đếm.
Trang 75

Bài giảng Hệ thống Cơ điện tử 1
Bộ đếm vừa đếm lên vừa đếm xuống đếm lên khi có sườn lên ở đầu vào đếm
lên (CU) và đếm xuống khi có sườn lên ở đầu vào đếm xuống (CD). Khi giá trị đếm
(Cxxx) lớn hơn hoặc bằng giá trị đặt trước PV thì bit trạng thái (Cxxx) sẽ có giá trị
1 (ON). Ngược lại thì bit trạng thái (Cxxx) sẽ có giá trị 0 (OFF). Bộ đếm có thể bị
xóa (RESET) bởi mức 1 ở đầu vào reset (R), lúc đó cả giá trị đếm lẫn bit trạng thái
sẽ bị xóa về 0.
Số hiệu các bộ đếm Cxxx từ C0 đến C255.
Lệnh khai báo sử dụng bộ đếm trong LAD và STL
Hình 4.28. Bộ đếm CTD và biểu đồ thời gian.
Trang 76
NETWORK 1
LD I0.0
LD I0.1
CTD C1, +3
NETWORK 2
LD C1
= Q0.0

Bài giảng Hệ thống Cơ điện tử 1
Hình 4.29. Bộ đếm CTUD và biểu đồ thời gian.
Trang 77
NETWORK 1
LD I0.0
LD I0.1
LD I0.2
CTUD C48, +4
NETWORK 2
LD C48
= Q0.0

Bài giảng Hệ thống Cơ điện tử 1
4.4.10. Các lênh số học.
Cú pháp dùng lệnh cộng và trừ hai số nguyên 16 bit trong LAD và STL như sau:
STL LAD Mô tả Toán hạng
+I IN1, IN2
Là lệnh thực hiện phép cộng các
số nguyên 16-bit IN1 và IN2.
Trong LAD kết quả là một số
nguyên 16-bit được ghi vào
OUT, tức là:
IN1 + IN2 = OUT.
Còn trong STL, kết quả cũng là
một giá trị 16-bit nhưng được ghi
vào IN2, tức là:
IN1 + IN2 = IN2.
IN1, IN2: VW,
IW, QW, MW,
SW, SMW, T, C,
AC, LW, AIW,
Constant, *VD,
*LD, *AC.
OUT: VW, IW,
QW, MW, SW,
SMW, T, C, LW,
AC, *VD, *LD,
*AC.
-I IN1, IN2
Là lệnh thực hiện phép trừ các số
nguyên 16-bít IN1 và IN2.
Trong LAD kết quả là một số
nguyên 16-bít được ghi vào
OUT, tức là:
IN1 - IN2 = OUT.
Còn trong STL, kết quả cũng là
một giá trị 16-bít nhưng được ghi
vào IN2, tức là:
IN1 - IN2 = IN2.
Cú pháp dùng lệnh cộng và trừ hai số nguyên 32 bit trong LAD và STL như sau:
STL LAD Mô tả Toán hạng
Trang 78

Bài giảng Hệ thống Cơ điện tử 1
+DI IN1, IN2
Là lệnh thực hiện phép cộng các
số nguyên 32-bit IN1 và IN2.
Trong LAD kết quả là một số
nguyên 32-bit được ghi vào
OUT, tức là:
IN1 + IN2 = OUT.
Còn trong STL, kết quả cũng là
một giá trị 32-bit nhưng được ghi
vào IN2, tức là:
IN1 + IN2 = IN2.
IN1, IN2: VD,
ID, QD, MD,
SMD, SD, LD,
AC, HC,
Constant, *VD,
*LD, *AC.
OUT: VD, ID,
QD, MD, SMD,
SD, LD, AC,
*VD, *LD, *AC.
-DI IN1, IN2
Là lệnh thực hiện phép trừ các số
nguyên 32-bit IN1 và IN2.
Trong LAD kết quả là một số
nguyên 32-bit được ghi vào
OUT, tức là:
IN1 - IN2 = OUT.
Còn trong STL, kết quả cũng là
một giá trị 16-bit nhưng được ghi
vào IN2, tức là:
IN1 - IN2 = IN2.
Cú pháp dùng lệnh cộng và trừ hai số thực trong LAD và STL như sau:
STL LAD Mô tả Toán hạng
+R IN1, IN2
Là lệnh thực hiện phép cộng các
số thực 32-bit IN1 và IN2.
Trong LAD kết quả là một số
thực 32-bit được ghi vào OUT,
tức là:
IN1 + IN2 = OUT.
Còn trong STL, kết quả cũng là
một giá trị thực 32-bit nhưng
được ghi vào IN2, tức là
IN1 + IN2 = IN2
IN1, IN2: VD,
ID, QD, MD, SD,
SMD, LD, AC,
Constant, *VD,
*LD, *AC.
OUT: VD, ID,
QD, MD, SD,
SMD, LD, AC,
*VD, *LD, *AC.-R IN1, IN2 Là lệnh thực hiện phép trừ các số
Trang 79

Bài giảng Hệ thống Cơ điện tử 1
thực 32-bit IN1 và IN2.
Trong LAD kết quả là một số
thực 32-bit được ghi vào OUT,
tức là:
IN1 - IN2 = OUT.
Còn trong STL, kết quả cũng là
một giá trị thực 32-bit nhưng
được ghi vào IN2, tức là:
IN1 - IN2 = IN2
Trang 80

Bài giảng Hệ thống Cơ điện tử 1
Cú pháp dùng lệnh nhân và chia hai số nguyên 16 bit trong LAD và STL:
STL LAD Mô tả Toán hạng
*I IN1, IN2
Là lệnh thực hiện phép nhân các
số nguyên 16-bit IN1 và IN2.
Trong LAD kết quả là một số
nguyên 16-bit được ghi vào
OUT, tức là:
IN1 * IN2 = OUT.
Còn trong STL, kết quả cũng là
một giá trị 16-bit nhưng được ghi
vào IN2, tức là:
IN1 * IN2 = IN2.
IN1, IN2: VW,
IW, QW, MW,
SW, SMW, T, C,
LW, AC, AIW,
Constant, *VD,
*LD, *AC.
OUT: VW, IW,
QW, MW, SW,
SMW, LW, T, C,
AC, *VD, *LD,
*AC.
/I IN1, IN2
Là lệnh thực hiện phép chia các
số nguyên 16-bit IN1 và IN2.
Trong LAD kết quả là một số
nguyên 16-bit được ghi vào
OUT, tức là:
IN1/IN2 = OUT.
Còn trong STL, kết quả cũng là
một giá trị 16-bit nhưng được ghi
vào IN2, tức là:
IN1/IN2 = IN2.
Cú pháp dùng lệnh nhân và chia hai số nguyên 32 bit trong LAD và STL:
STL LAD Mô tả Toán hạng
Trang 81

Bài giảng Hệ thống Cơ điện tử 1
*DI IN1, IN2
Là lệnh thực hiện phép nhân các
số nguyên 32-bit IN1 và IN2.
Trong LAD kết quả là một số
nguyên 32-bit được ghi vào
OUT, tức là:
IN1 * IN2 = OUT.
Còn trong STL, kết quả cũng là
một giá trị 32-bit nhưng được ghi
vào IN2, tức là:
IN1 * IN2 = IN2.
IN1, IN2: VD,
ID, QD, MD,
SMD, SD, LD,
HC, AC,
Constant, *VD,
*LD, *AC.
OUT: VD, ID,
QD, MD, SMD,
SD, LD, AC,
*VD, *LD, *AC.
/DI IN1, IN2
Là lệnh thực hiện phép chia các
số nguyên 32-bit IN1 và IN2.
Trong LAD kết quả là một số
nguyên 32-bit được ghi vào
OUT, tức là:
IN1/IN2 = OUT.
Còn trong STL, kết quả cũng là
một giá trị 32-bit nhưng được ghi
vào IN2, tức là:
IN1/IN2 = IN2.
Cú pháp dùng lệnh nhân và chia hai số thực trong LAD và STL như sau:
STL LAD Mô tả Toán hạng
*R IN1, IN2
Là lệnh thực hiện phép nhân các
số thực 32-bit IN1 và IN2.
Trong LAD kết quả là một số
thực 32-bit được ghi vào OUT,
tức là:
IN1 * IN2 = OUT.
Còn trong STL, kết quả cũng là
một giá trị thực 32-bit nhưng
được ghi vào IN2, tức là
IN1 * IN2 = IN2
IN1, IN2: VD,
ID, QD, MD,
SMD, SD, LD,
AC, Constant,
*VD, *LD, *AC.
OUT: VD, ID,
QD, MD, SMD,
SD, LD, AC,
*VD, *LD, *AC./R IN1, IN2 Là lệnh thực hiện phép chia các
Trang 82

Bài giảng Hệ thống Cơ điện tử 1
số thực 32-bit IN1 và IN2.
Trong LAD kết quả là một số
thực 32-bit được ghi vào OUT,
tức là:
IN1/IN2 = OUT.
Còn trong STL, kết quả cũng là
một giá trị thực 32-bit nhưng
được ghi vào IN2, tức là:
IN1/IN2 = IN2
Trang 83

Bài giảng Hệ thống Cơ điện tử 1
Cú pháp dùng lệnh căn bậc hai trong LAD và STL như sau:
STL LAD Mô tả Toán hạng
SQRT IN, OUT
Là một lệnh thực hiện
lấy căn bậc hai của số
thực 32-bít IN. Kết quả
cũng là một số 32-bít
được ghi vào từ kép
OUT.
IN: VD, ID, QD, MD,
SMD, SD, LD, AC,
Constant, *VD, *LD,
*AC.
OUT: VD, ID, QD, MD,
SMD, SD, LD, AC,
*VD, *LD, *AC.
Những bit nhớ đặc biệt có nội dung bị ảnh hưởng bởi các lệnh số học:
SM1.0 = 1 nếu kết quả bằng 0.
SM1.1 = 1 nếu tràn.
SM1.2 = 1 nếu kết quả âm.
SM1.3 = 1 nếu chia cho 0.
4.4.11. Lệnh tăng, giảm một đơn vị và lệnh đảo giá trị thanh ghi.
Các lệnh tăng, giảm và đảo giá trị thanh ghi sử dụng những ô nhớ đặc biệt
SM1.0 đến SM1.3 để thông báo trạng thái kết quả phép tính. Tên lệnh và những ô
nhớ đặc biệt mà lệnh đó sử dụng được trình bày trong bảng sau:
LệnhSM1.0
(Kết quả 0)
SM1.1
(Báo tràn)
SM1.2
(Kết quả âm)
SM1.3
(Chia cho 0)
INV_B Có Không Không Không
INV_W Có Không Không Không
INV_D Có Không Không Không
INC_B Có Có Có Không
INC_W Có Có Có Không
INC_D Có Có Có Không
DEC_B Có Có Có Không
DEC_W Có Có Có Không
DEC_D Có Có Có Không
Trang 84

Bài giảng Hệ thống Cơ điện tử 1
Cú pháp dùng lệnh tăng một giá trị trong LAD và STL như sau:
STL LAD Mô tả Toán hạng
INCB OUT
Thêm một đơn vị từ một
Byte được định địa chỉ ở
đầu vào IN. Kết quả được
lưu vào Byte được định địa
chỉ ở đầu ra OUT.
[IN] + 1 = [OUT]
IN: VB, IB, QB, MB, SB,
SMB, LB, AC, Constant,
*VD, *LD, *AC
OUT: VB, IB, QB, MB, SB,
SMB, LB, AC, *VD, *LD,
*AC
INCW OUT
Thêm một đơn vị từ một từ
đơn được định địa chỉ ở
đầu vào IN. Kết quả được
lưu vào từ đơn được định
địa chỉ ở đầu ra OUT.
[IN] + 1 = [OUT]
IN: VD, ID, QD, MD, SD,
SMD, LD, AC, HC,
Constant, *VD, *LD, *AC
OUT: VD, ID, QD, MD, SD,
SMD, LD, AC, *VD, *LD,
*AC
INCD OUT
Thêm một đơn vị từ một từ
kép được định địa chỉ ở
đầu vào IN. Kết quả được
lưu vào từ kép được định
địa chỉ ở đầu ra OUT.
[IN] + 1 = [OUT]
IN: VD, ID, QD, MD, SD,
SMD, LD, AC, HC,
Constant, *VD, *LD, *AC
OUT: VD, ID, QD, MD, SD,
SMD, LD, AC, *VD, *LD,
*AC
Cú pháp dùng lệnh giảm một giá trị trong LAD và STL như sau:
STL LAD Mô tả Toán hạng
DECB OUT
Giảm một đơn vị từ một
Byte được định địa chỉ ở
đầu vào IN. Kết quả được
lưu vào Byte được định địa
chỉ ở đầu ra OUT.
[IN] - 1 = [OUT]
IN: VB, IB, QB, MB, SB,
SMB, LB, AC, Constant,
*VD, *LD, *AC
OUT: VB, IB, QB, MB, SB,
SMB, LB, AC, *VD, *LD,
*AC
DECW OUT
Giảm một đơn vị từ một từ
đơn được định địa chỉ ở
đầu vào IN. Kết quả được
lưu vào từ đơn được định
địa chỉ ở đầu ra OUT.
[IN] - 1 = [OUT]
IN: VD, ID, QD, MD, SD,
SMD, LD, AC, HC,
Constant, *VD, *LD, *AC
OUT: VD, ID, QD, MD, SD,
SMD, LD, AC, *VD, *LD,
*AC
Trang 85

Bài giảng Hệ thống Cơ điện tử 1
DECD OUT
Giảm một đơn vị từ một từ
kép được định địa chỉ ở
đầu vào IN. Kết quả được
lưu vào từ kép được định
địa chỉ ở đầu ra OUT.A
[IN] - 1 = [OUT]
IN: VD, ID, QD, MD, SD,
SMD, LD, AC, HC,
Constant, *VD, *LD, *AC
OUT: VD, ID, QD, MD, SD,
SMD, LD, AC, *VD, *LD,
*AC
Cú pháp dùng lệnh đảo giá trị thanh ghi trong LAD và STL như sau:
STL LAD Mô tả Toán hạng
INVB OUT
Lệnh đảo giá trị từng bit
của byte IN ở đầu vào. Kết
quả được lưu vào byte
OUT ở đầu ra.
IN: VB, IB, QB, MB, SB,
SMB, LB, AC, Constant,
*VD, *AC, *LD
OUT: VB, IB, QB, MB, SB,
SMB, LB, AC, *VD, *LD,
*AC
INVW OUT
Lệnh đảo giá trị từng bit
của từ đơn IN ở đầu vào.
Kết quả được lưu vào từ
đơn OUT ở đầu ra.
IN: VD, ID, QD, MD, SD,
SMD, LD, AC, HC,
Constant, *VD, *LD, *AC
OUT: VD, ID, QD, MD, SD,
SMD, LD, AC, *VD, *LD,
*AC
INVD OUT
Lệnh đảo giá trị từng bit
của từ kép IN ở đầu vào.
Kết quả được lưu vào từ
kép OUT ở đầu ra.
IN: VD, ID, QD, MD, SD,
SMD, LD, AC, HC,
Constant, *VD, *LD, *AC
OUT: VD, ID, QD, MD, SD,
SMD, LD, AC, *VD, *LD,
*AC
Trang 86

Bài giảng Hệ thống Cơ điện tử 1
Ví dụ: Về lệnh tăng giảm một giá trị.
Ví dụ: Về lệnh đảo giá trị thanh ghi.
Trang 87

Bài giảng Hệ thống Cơ điện tử 1
4.4.12. Các lệnh dịch chuyển nội dung ô nhớ.
STL LAD Mô tả Toán hạng
MOVB IN, OUT
Lệnh sao chép nội
dung của byte IN
sang byte OUT.
IN: VB, IB, QB, MB, SB, SMB,
LB, AC, Constant, *VD, *LD,
*AC.
OUT: VB, IB, QB, MB, SB,
SMB, LB, AC, *VD, *LD, *AC.
MOVW IN, OUT
Lệnh sao chép nội
dung của từ đơn
IN sang từ đơn
OUT.
IN: VW, IW, QW, MW, SW,
SMW, LW, T, C, AIW,
Constant, AC, *VD, *AC, *LD.
OUT: VW, T, C, IW, QW, SW,
MW, SMW, LW, AC, AQW,
*VD, *AC, *LD.
MOVD IN, OUT
Lệnh sao chép nội
dung của từ kép
IN sang từ kép
OUT.
IN: VW, IW, QW, MW, SW,
SMW, LW, T, C, AIW,
Constant, AC, *VD, *AC, *LD.
OUT: VW, T, C, IW, QW, SW,
MW, SMW, LW, AC, AQW,
*VD, *AC, *LD.
MOVR IN, OUT
Lệnh sao chép nội
dung của số thực
IN sang số thực
OUT.
IN: VD, ID, QD, MD, SD,
SMD, LD, AC, Constant, *VD,
*LD, *AC.
OUT: VD, ID, QD, MD, SD,
SMD, LD, AC, *VD, *LD, *AC.
Trang 88