Embed Size (px)
Citation preview

POLITECNICO DI MILANO
Scuola di Ingegneria Industriale e dell'Informazione
Corso di Laurea Magistrale in Ingegneria Biomedica
BANCO PROVA PER LA SIMULAZIONE
DELLA CIRCOLAZIONE PEDIATRICA
PATOLOGICA, MODIFICATA SECONDO
GLENN
Relatore: Prof. Maria Laura Costantino
Correlatore: Dott. Ing. Francesco De Gaetano
Tesi di laurea di:
Alessandro Avis 842014
Stefania Lacché 842074
Anno accademico 2016/2017


Indice dei contenuti
Sommario ............................................................................................................................... I
Summary .............................................................................................................................. XI
1 Fisiopatologia del sistema cardio-circolatorio ............................................................... 1
Sistema circolatorio ................................................................................................ 2
1.1.1 Il cuore ............................................................................................................. 2
1.1.2 I vasi sanguigni ................................................................................................ 7
1.1.3 Il sangue ......................................................................................................... 10
Malattie cardiache congenite ................................................................................ 16
2 Dispositivi di supporto meccanico alla circolazione cardiaca ..................................... 33
Classificazione dei dispositivi di assistenza ventricolare ..................................... 34
Dispositivi di assistenza ventricolare ad uso pediatrico ....................................... 38
3 Stato dell’arte dei simulatori del sistema circolatorio ................................................. 47
Stato dell’arte dei modelli a parametri concentrati ............................................... 48
Stato dell’arte dei banchi prova ............................................................................ 57
4 Progettazione del banco prova attraverso un modello a parametri concentrati ........... 64
Scelta del modello ................................................................................................. 65
Calcolo BSA ......................................................................................................... 67
Calcolo dei parametri del circuito ......................................................................... 68
Simulazione dei modello in Simulink ................................................................... 78
5 Realizzazione del banco prova .................................................................................... 88
Strumentazione utilizzata ...................................................................................... 89
Resistenza idraulica .............................................................................................. 93
5.2.1 Stato dell’arte delle resistenze idrauliche ...................................................... 93
5.2.2 Caratterizzazione e dimensionamento degli elementi resistivi...................... 99

5.2.3 Progettazione dell’alloggiamento per gli elementi resistivi ........................ 112
Compliance ......................................................................................................... 117
5.3.1 Stato dell’arte delle compliance .................................................................. 117
5.3.2 Dimensionamento e progettazione degli elementi complianti .................... 122
5.3.3 Caratterizzazione casse d’aria ..................................................................... 125
Inertanza .............................................................................................................. 130
Sistema di attuazione .......................................................................................... 131
5.5.1 Sistema di controllo ..................................................................................... 132
5.5.2 Verifica di funzionamento ........................................................................... 139
Assemblaggio circuito ........................................................................................ 142
6 Analisi e discussione dei risultati .............................................................................. 148
Pressione di comando ......................................................................................... 149
Portata in mandata al VAD (Swanson e Clark) .................................................. 151
Pressione aortica ................................................................................................. 153
Confronto delle portate tra distretti superiori e vena polmonare ........................ 155
7 Conclusioni e sviluppi futuri ..................................................................................... 160
Bibliografia ........................................................................................................................ 165
APPENDICE A ................................................................................................................. 171
APPENDICE B ................................................................................................................. 174


I
Sommario
Introduzione
Questo lavoro di tesi si inserisce nell'ambito della ricerca sui difetti cardiaci a ventricolo
unico e si pone come obiettivo la realizzazione di un banco prova atto a simulare il sistema
cardiocircolatorio pediatrico, a seguito dell’intervento di Glenn, per pazienti di 2, 4 e 5 anni.
I difetti cosiddetti a ventricolo unico fanno parte delle malattie congenite cardiache in cui il
cuore si presenta alla nascita come sottosviluppato e incompleto. Ciò è dovuto all’ipoplasia
dei suoi tessuti, che può essere del cuore destro, più raramente, o del cuore sinistro, più
comunemente. In questo lavoro di tesi viene trattata quella sinistra.
A causa della mancanza del ventricolo sinistro, il sangue, di ritorno dalla vena polmonare,
deve attraversare un difetto inter-atriale (forame ovale) ed essere spinto dal ventricolo destro
fuori dal cuore attraverso il dotto di Botallo. Il solo ventricolo destro si prende così carico di
entrambe le circolazioni, e grazie alla pervietà del suddetto dotto, il sangue è in grado
arrivare sia ai polmoni che agli altri gli organi.
Al momento della nascita il dotto di Botallo e il forame ovale si chiudono spontaneamente
ed è quindi necessario intervenire chirurgicamente per garantire il completo circolo del
sangue. Ad oggi vi sono due tipi di trattamento possibili: il trapianto di cuore che si presenta
come “gold standard” o una serie di interventi palliativi che precedono il trapianto. La
procedura palliativa, nota anche come procedura di Norwood, può essere suddivisa in tre
stadi chirurgici:
- intervento di Norwood, nei primi giorni di vita;
- intervento di Glenn, tra il quinto e il sesto mese di vita;
- intervento di Fontan tra il quarto e il quinto anno di vita.
Negli ultimi anni sono in corso diversi studi atti a migliorare le condizioni del paziente in
seguito all’intervento di Glenn per evitare il terzo intervento prima del trapianto. L’effetto
di tale operazione è quello di convogliare il sangue venoso, proveniente dai distretti superiori
del corpo, nel circolo polmonare che è collegato all’atrio comune tramite vena polmonare.
La vena cava inferiore, invece, viene lasciata in posizione fisiologica, quindi parte del sangue
non ossigenato è ancora in grado di entrare nel circolo sistemico e ciò causa una leggera
cianosi del paziente.

II
Il banco prova realizzato in questo progetto di tesi è in grado di simulare correttamente le
pressioni e le portate nei diversi distretti del circuito. Nella configurazione realizzata si
ricorre all’utilizzo di un dispositivo di assistenza ventricolare pulsatile (VAD) per simulare
la funzione dell’unico ventricolo.
Materiali e metodi
Il processo di realizzazione del banco prova è stato diviso in due parti: una di progettazione
e una di realizzazione dei componenti. Durante la prima parte del lavoro è stato
implementato un modello computazionale a parametri concentrati. Successivamente,
utilizzando i valori degli elementi presenti nel modello, sono stati progettati, dimensionati e
realizzati tutti i componenti da inserire nel circuito.
Implementazione di un modello a parametri concentrati
Per la progettazione del banco prova si è ricorso all’utilizzo di un modello a parametri
concentrati. La rappresentazione elettrica è indicata per il sistema cardiocircolatorio, in
quanto è semplice da realizzare e presenta analogie con i sistemi idraulici. Il modello scelto
è stato implementato utilizzando la libreria Electrical della Foundation library di Simscape
presente in Simulink, un toolbox di Matlab®, che permette la simulazione di circuiti elettrici.
I risultati di tale simulazione forniscono i valori di pressione e portata nei diversi punti del
circuito.
Il modello utilizzato è rappresentato in Figura I.1 e può essere diviso in tre distretti distinti
che simulano rispettivamente distretti superiori, distretti inferiori e distretto polmonare. Ogni
distretto è stato rappresentato attraverso un modello Windkessel a 3 o 4 elementi.

III
Figura I.1 Equivalente elettrico del sistema cardiocircolatorio in seguito all'operazione di Glenn.
I valori di tutti gli elementi sono stati ottenuti rielaborando il modello a parametri concentrati
utilizzato da Baretta et al [1]. Il modello in questione presenta un numero superiore di
elementi rispetto a quello adottato ed è associato ad una superficie corporea (BSA) pari a
0.66 m2. Per prima cosa è stato necessario associare questo modello alle BSA di interesse
(0.56, 0.67 e 0.74 m2) attraverso l’uso di equazioni allometriche e, in secondo luogo è stato
necessario ridurlo attraverso un metodo semplificativo. La validità di questo metodo è stata
infine provata confrontando la funzione di trasferimento del circuito adottato con quella
associata al circuito di partenza. È stata inoltre effettuata una simulazione in Simulink, per
ottenere i valori di portata e pressione in tutti i distretti, impostando una portata di 1.2 l/min
e una frequenza cardiaca pari a 100 bpm. La curva di portata impostata come sorgente per il
ventricolo è quella proposta da Swanson e Clark.
Progettazione e realizzazione del banco prova
Una volta costruito il modello a parametri concentrati, da esso sono stati estrapolati i valori
di resistenze, compliance e inertanze necessari a progettare gli elementi del banco prova.
Quest’ultimo infatti mantiene la struttura e il numero di componenti proprio del modello
realizzato in silico.
I primi pezzi ad essere realizzati sono stati gli elementi resistivi. Per la loro realizzazione si
è scelto di utilizzare un sistema bicomponente formato da un cilindro cavo di materiale
poroso e da una barra piena con diametro pari a quello della cavità interna del cilindro.
La resistenza offerta dal campione poroso, nell’alloggiamento appropriato, varia al variare
della posizione della barra al suo interno. Si ottiene infatti la resistenza massima inserendo

IV
la barra per tutta la lunghezza del provino, e la resistenza minima occludendo il mezzo solo
per un centimetro.
Al fine di ottenere campioni con porosità controllata, essi sono stati realizzati tramite
l’utilizzo della stampante 3D (Prusa i3, RepRap),. Il gcode di ogni stampa è stato realizzato
con il software Cura (ver. 2.6.2, Ultimaker).
La porosità di ogni campione è stata ottenuta impostando nel software di comando diverse
percentuali di riempimento (Infill Density) e diverse trame di riempimento (Infill Pattern).
Sono stati stampati 8 mezzi porosi con caratteristiche differenti.
Ognuno di essi è stato caratterizzato sia con barra inserita per tutta la sua lunghezza sia con
barra inserita per un solo centimetro, per conoscere l’intervallo di resistenza che lo stesso
poteva offrire. Dalle prove è stata inoltre ricavata la resistività propria di ogni campione.
Con questo dato è stato possibile calcolare la lunghezza che ogni elemento resistivo del
circuito avrebbe dovuto avere, se stampato con le stesse caratteristiche del campione
esaminato. Sono state scelte le porosità che permettevano di ottenere elementi resistivi tra i
3 e i 9 cm di lunghezza, quindi si è proceduto con la stampa. Grazie alla loro capacità di
regolazione, ognuno di questi elementi è in grado di simulare il valore di resistenza offerto
nel distretto in cui è stato posto, per tutte tre le BSA di interesse.
Dopo aver realizzato gli elementi resistivi è stato necessario progettare un alloggiamento che
garantisse il movimento assiale della barra e allo stesso tempo avesse una struttura lineare
per evitare eccessive perdite di carico.
La soluzione tecnica scelta è mostrata in Figura I.2.
Figura I.2 Rappresentazione CAD dell'elemento resistente con soluzione traslante. Connettore da ½“(1); Tubo interno
(2); Mezzo poroso (3); Tubo esterno (4);barra (5); Vite (6).

V
Come rappresentato in Figura I.2 la barra è retta da una vite vincolata ad un tubo esterno
tramite due fori diametralmente opposti. L’inserimento della barra all’interno del mezzo
poroso è ottenuto traslando il tubo esterno su quello interno, il che è permesso dalla presenza
di due scanalature su quest’ultimo. La tenuta idraulica è stata garantita dal posizionamento
di due o ring alle estremità delle scanalature del tubo interno e dalla presenza di due
guarnizioni poste all’altezza in cui la barra trasversale fuoriesce dal tubo esterno.
Per la costruzione del banco prova, oltre agli elementi resistivi sono stati progettati elementi
complianti in grado di rappresentare la variazione di volume subita dai condotti al variare
delle pressioni interne. Per la loro realizzazione si è scelto di utilizzare casse d’aria chiuse
in quanto facilmente regolabili e semplici da utilizzare.
I volumi di aria e acqua da inserire nelle casse sono stati ottenuti utilizzando le equazioni
che regolano i gas perfetti, assumendo per ipotesi che l’aria si comporti come tale e subisca
due diverse trasformazioni: quella isoterma e quella adiabatica.
Per poter dimensionare le casse d’aria, sono stati considerati i valori di compliance dei
distretti, provenienti dal modello a parametri concentrati.
Dopo aver valutato i volumi necessari ad ottenere questi valori, tali casse sono state costruite
per i distretti associati alla BSA da 0.56 m2. Ad esse è stato possibile collegare i volumi
aggiuntivi necessari ad aumentare la loro capacità e ad ottenere i volumi necessari per
simulare le compliance associate alle BSA di 0.67 e 0.74 m2.
Nel modello a parametri concentrati gli ultimi elementi rappresentati sono le inertanze. Per
riprodurle nel banco, non sono stati progettati elementi appositi ma è stata appositamente
scelta la dimensione dei tubi di collegamento del circuito.
Essi infatti, incorporano, l’inerzia del fluido nell’attraversarli.
Sistema di attuazione e sistema di controllo.
Come accennato nell’introduzione, per rappresentare la funzione del ventricolo unico, nel
banco prova, è stato utilizzato un dispositivo di assistenza ventricolare.
Non disponendo di nessuna delle stazioni apposite per il suo funzionamento, è stato creato
un circuito pneumatico comandato da scheda Arduino, progettato e assemblato ad hoc.
VI
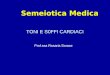
Figura I.3 Rappresentazione della linea pneumatica per il controllo del ventricolo. (1) Linea dell’aria compressa. (2) Filtro
regolatore. (3) Valvola ad azionamento meccanico. (4) Regolatore di pressione. (5) Elettrovalvola a 2 vie. (6) Eiettore di vuoto. (7)
Elettrovalvola a 3 vie. (8) Sistema di controllo. (9) ventricolo.
Come si vede dalla Figura I.3 il circuito comprende due elettrovalvole necessarie per
intervallare la fase di diastole con quella di sistole. Per il loro funzionamento è stato
necessario progettare il sistema di controllo. È stato utilizzato Arduino (ARDUINO MEGA
2560, Arduino LLC, Ivrea), un controllore facilmente disponibile in commercio,
programmabile e con costi contenuti.
Il codice implementato permette all’utente l’inserimento della frequenza cardiaca e della
percentuale di durata della sistole rispetto alla durata totale di un singolo battito. Questi
valori regolano l’apertura delle valvole.
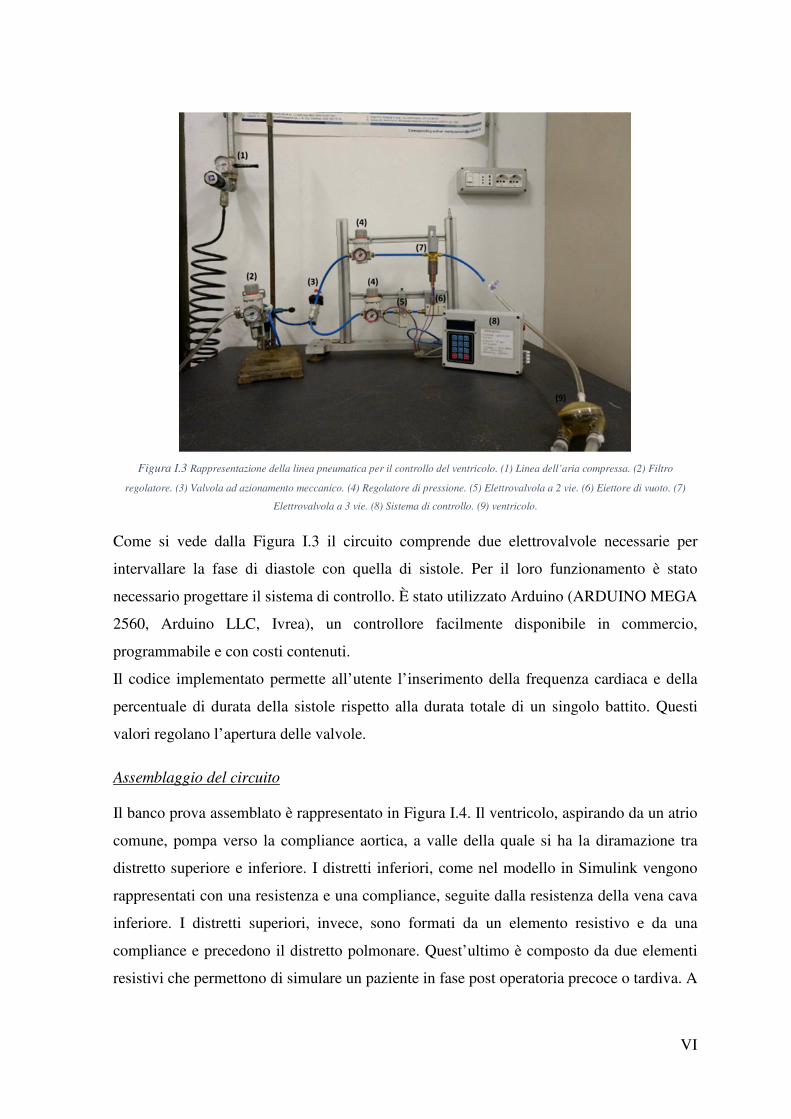
Assemblaggio del circuito
Il banco prova assemblato è rappresentato in Figura I.4. Il ventricolo, aspirando da un atrio
comune, pompa verso la compliance aortica, a valle della quale si ha la diramazione tra
distretto superiore e inferiore. I distretti inferiori, come nel modello in Simulink vengono
rappresentati con una resistenza e una compliance, seguite dalla resistenza della vena cava
inferiore. I distretti superiori, invece, sono formati da un elemento resistivo e da una
compliance e precedono il distretto polmonare. Quest’ultimo è composto da due elementi
resistivi che permettono di simulare un paziente in fase post operatoria precoce o tardiva. A
VII
seconda della condizione che si vuole simulare, si esclude uno dei due rami dal circuito
tramite l’uso di clamp. Il circuito prosegue con la compliance polmonare, la resistenza della
vena polmonare e, infine, converge in un atrio comune simulato tramite l’utilizzo di due
casse aperte.
Durante le prove per rappresentare la resistenza aortica e ritrovare le pressioni corrette è
stato utilizzato uno stringi vena, posto a valle della compliance aortica.
Figura I.4 Banco prova configurato per pazienti pediatrici con BSA di 0.56 m2. (1) Ventricolo da 25 ml (EXCOR VAD, Berlin
Heart GmbH, Berlin), dispositivo usato per simulare il singolo ventricolo; (2) Compliance aortica; (3) Resistenza distretti
inferiori; (4) Compliance distretti inferiori; (5) Resistenza IVC; (6) Resistenza distretti superiori; (7) Compliance distretti superiori; (8)
Resistenza polmonare regolabile; (9) Resistenza polmonare fissa; (10) Compliance polmonare; (11) Resistenza della vena polmonare;
(12) Prima cassa dell’atrio comune; (13) Seconda cassa dell’atrio comune.

VIII
Analisi e discussione dei risultati
Una volta assemblato il circuito sono stati effettuati i test nelle tre diverse configurazioni di
progetto (BSA pari a 0.56, 0.67e 0.74 m2).
Al fine di permettere il confronto tra le acquisizioni ottenute sperimentalmente e i risultati
delle simulazioni effettuate in Simulink, è stata imposta una frequenza cardiaca pari a 100
bpm e una portata media di 1.2 l/min. Inoltre è stata regolata la pressione di comando tramite
i regolatori presenti sulla linea pneumatica. Attraverso l’utilizzo di trasduttori di pressione è
stata rilevato il segnale pressorio a valle di ogni distretto, mentre, utilizzando un flussimetro
con apposite sonde, è stata misurata la portata a monte di ogni resistenza.
In Figura I.5 è mostrato l’andamento della pressione di comando per il circuito associato alla
BSA di 0.56 m2.
Figura I.5 Andamento della pressione di comando e andamento della portata in uscita dal VAD, usato per simulare il
singolo ventricolo, per BSA di 0.56 m2.
I valori della pressione della linea d’aria variano a seconda della BSA che si sta simulando.
È da notare che, per garantire una portata di 1.2 l/min con una frequenza di 100 bpm, lo
stroke volume nominale è di 12 ml e il ventricolo utilizzato, avendo capacità pari a 25 ml,
non deve riempirsi e svuotarsi completamente. Per questo motivo la pressione misurata lato
aria della membrana mostra un andamento anomalo.
Per quanto riguarda il confronto tra risultati sperimentali e computazionali, in Figura I.6 e
Figura I.7 vengono riportati i grafici relativi alla portata di mandata per la BSA di 0.56 m2.
-40-20020406080100120140160180200
-1
0
1
2
3
4
5
0 0,5 1 1,5 2
Pre
ssio
ne
[m
mH
g]
Po
rta
ta [
l/m
in]
Tempo [s]
Portata e Pressione in uscita dal VAD
BSA 0.56 m2
Portata
Pressione

IX
Figura I.6 Confronto tra la portata misurata sperimentalmente in uscita dal VAD, usato per simulare il singolo
ventricolo, e quella ottenuta dal modello Simulink. Valori sperimentali per BSA di 0.56 m2: �� = 1.35 l/min, Qmax = 4.49
l/min.
Si evince che la curva sperimentale segue lo stesso andamento proposto dalla Swanson e
Clark, benché il picco massimo risulti minore di quello teorico. Questo andamento si ripete
per tutte e tre le BSA.
Figura I.7 Confronto tra la pressione nel distretto aortico misurata sperimentalmente e ottenuta dal modello Simulink
per BSA 0.56 m2. I valori di pressione media, massima e minima per il banco prova sono: �� = 55.88 mmHg, Pmax = 74.04
mmHg, Pmin = 38.25 mmHg. I valori di pressione media, massima e minima per il modello Simulink sono: �� = 56.77
mmHg, Pmax = 71.95 mmHg, Pmin = 40.33 mmHg.
Come per le portate anche i segnali relativi alla pressione arteriosa sperimentale e
computazionale sono confrontabili, sia come andamento che come valori. Ciò si ripete anche
-1
0
1
2
3
4
5
6
7
8
0 0,5 1 1,5 2 2,5 3 3,5 4
Po
rta
ta [
l/m
in]
Tempo [s]
Confronto portate in uscita dal VAD - BSA 0.56 m2
Sperimentale
Simulink
0
10
20
30
40
50
60
70
80
0 0,5 1 1,5 2 2,5 3 3,5 4
Pre
ssio
ne
[m
mH
g]
Tempo [s]
Confronto pressione aortica - BSA 0.56 m2
Simulink
Sperimentale

X
per le curve di pressione e portata ottenute dalle misurazioni nei distretti superiori, inferiori
e polmonare.
Come ultima analisi è stato confrontato l’andamento delle pressioni e delle portate rilevate
nei singoli distretti del circuito. Confrontando la portata registrata a monte della resistenza
della vena polmonare, essa risulta smorzata rispetto a quella acquisita nel distretto polmonare
e a monte dei distretti superiori. Questo andamento si ripete anche per le pressioni e si
riscontra nei tracciati rilevati in tutti e tre i circuiti. L’utilizzo di due casse a pelo libero per
simulare l’unico atrio permette quindi di evitare che le oscillazioni dovute alla pulsatilità del
VAD usato per rappresentare il cuore, influenzino i tracciati di portata e pressione rilevati
nella vena polmonare e nella vena cava inferiore.
Conclusioni e sviluppi futuri
Il banco prova realizzato risulta versatile in quanto permette di simulare i circuiti associati a
tre diverse BSA (0.56, 0.67 e 0.74 m2) regolando la resistenza offerta dagli elementi resistivi
e variando, tramite l’utilizzo di volumi aggiuntivi, il valore di compliance offerto dalle casse.
Tra i possibili sviluppi futuri si può pensare di utilizzare il banco prova per valutare le
condizioni di un paziente dopo l’intevento di Glenn sia in condizioni stabili che in seguito
allo sviluppo di determinate patologie. La possibilità di regolare singolarmente ogni
parametro permette infatti di simulare disfunzioni come l’insufficienza sistolica,
l’insufficienza diastolica, l’ipertensione polmonare e di analizzare le pressioni e le portate a
cavallo dei distretti del circuito.
Mediante l’utilizzo di questo strumento è inoltre possibile indagare come variano i parametri
di interesse (pressioni e portate) nel caso di circolazione assistita. È possibile analizzare il
comportamento del dispositivo a seconda della frequenza imposta, della portata, e del tipo
di incannulazione effettuata (atriale o ventricolare).
Infine, poiché i collegamenti tra tubi ed elementi avvengono attraverso connettori, è
possibile collegare il tubo posto a valle della resistenza della vena cava inferiore a monte del
distretto polmonare, ottenendo così il circuito corrispondente all’operazione di Fontan. Tale
configurazione risulta utile per confrontare, per una stessa BSA o per una stessa patologia,
l’andamento di pressione e portate a seguito dei due diversi interventi.
XI
Summary
Background
The work done in this thesis is relative to the research on congenital heart defects, focusing
on single ventricle defects. The objective of this thesis was to design and develop a hydraulic
test bench, capable of simulating the pediatric cardio circulatory system in 2, 4 and 5-year-
old patients that had undergone the Glenn palliative surgery.
Single ventricle defects represent a rare disorder in which the newborn baby has an
incomplete or under developed heart. This is mainly due to hypoplasia of the tissue and can
affect both the left and the right side of the heart, even though the latter is a much rarer
condition. Therefore, the focus of this work is to study patients with a left hypoplastic
ventricle.
The absence of the left ventricle means that the right one must guarantee both the systemic
and pulmonary circulation. Before birth an inter-atrial defect named foramen ovale and the
ductus Botalli allow blood to flow, but because at birth these two passages spontaneously
close, surgery is required.
At present there are two ways of treating patients with this condition: heart transplant that
still represents the “gold standard” or a series of palliative procedures as a bridge to
transplant. The first option is a three-stage surgery also called Norwood procedure, that can
be divided as the follows:
- stage 1 or Norwood procedure, is carried out within the first days after birth;
- stage 2 or Glenn procedure, is carried out between the fith and sixth month after birth;
- stage 3 or Fontan procedure, is carried out between between the fourth and fith year
after birth.
Recently, research has focused on improving the patient’s conditions after stage 2 surgery
to avoid the Fontan procedure before transplant. The objective of the stage 2 procedure is to
redirect the blood coming from the upper body directly to pulmonary circulation, with the
pulmonary vein still attached to single atrium. The lower body, instead, still sends its venous
blood through the inferior vena cava and in to the atrium.
XII
Materials and methods
The first part of this work consisted in developing a computational lumped parameter model
(LPM), while the second in constructing the physical model. Dimensions and design were
decided based on the parameters found in the LPM.
Implementation of the lumped parameter model
Electrical modeling is an appropriate tool for modeling hydraulic systems because of the
analogies it shares with it and because of its simplicity. The LPM was developed in Simulink
(Matlab, Mathworks) using the electrical library in Simscape. From this model, the data of
interest were the pressure and flow curves measured in key points.
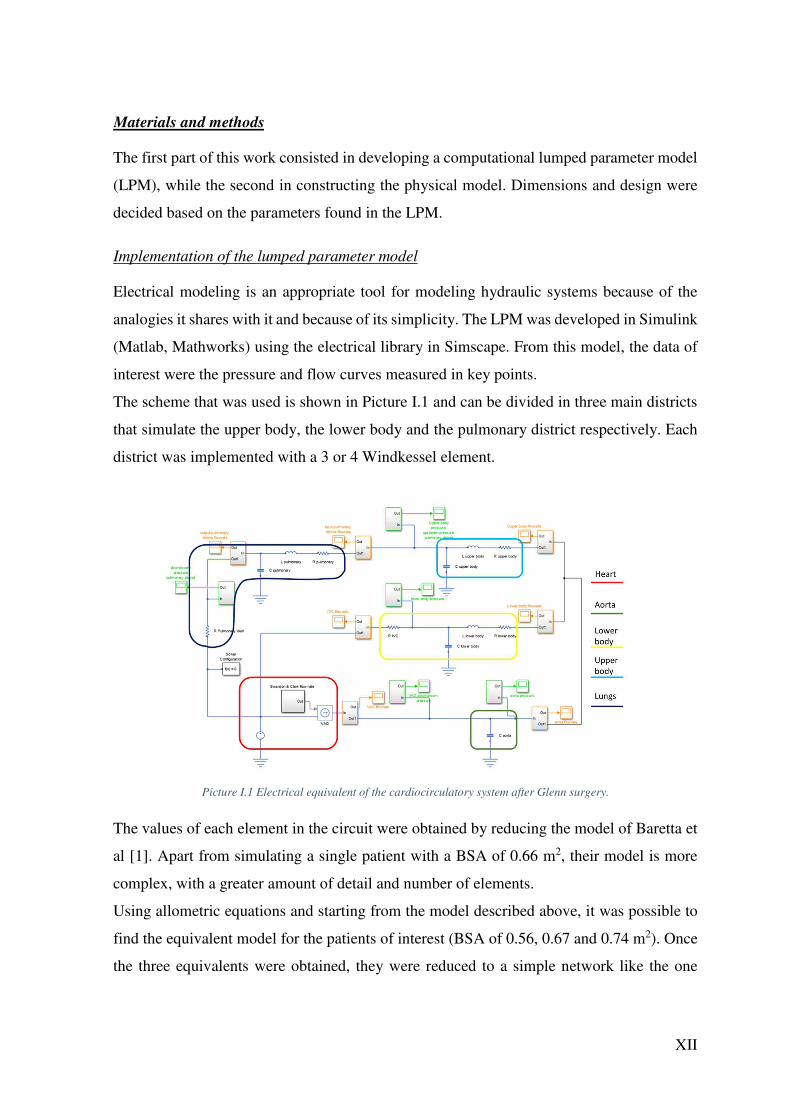
The scheme that was used is shown in Picture I.1 and can be divided in three main districts
that simulate the upper body, the lower body and the pulmonary district respectively. Each
district was implemented with a 3 or 4 Windkessel element.
Picture I.1 Electrical equivalent of the cardiocirculatory system after Glenn surgery.
The values of each element in the circuit were obtained by reducing the model of Baretta et
al [1]. Apart from simulating a single patient with a BSA of 0.66 m2, their model is more
complex, with a greater amount of detail and number of elements.
Using allometric equations and starting from the model described above, it was possible to
find the equivalent model for the patients of interest (BSA of 0.56, 0.67 and 0.74 m2). Once
the three equivalents were obtained, they were reduced to a simple network like the one

XIII
shown in the picture above. The method used was proven to be suitable by comparing the
transfer functions of the starting model with the reduced equivalent.
With the resulting LPMs, it was possible to simulate in Simulink the desired conditions of
the circulatory system with the single ventricle beating at 100 bpm, generating an average
blood flow of 1.2 l/min.
Design and development of the test bench
The value of the resistances, capacitances and inductances found with the LPM, were used
to design the elements of the mock loop. The latter, in fact, maintains the same number of
elements in it.
Starting from the resistances, the chosen element consisted in a two component system. A
cylindrical rod with the same internal diameter of a hollow porous cylinder. This element,
in the proper housing, can offer a variable resistance based on the length of the rod that is in
it. If the rod is completely inserted the resistance is maximum, while when the rod is inserted
for only one cm, the resistance is minimum. This allows the test bench to simulate the
circulation of the patients with different BSA.
The hollow cylinders were obtained with a 3D printer (Prusa i3, RepRap), available in the
laboratory, using Cura (Ultimaker, ver 2.6.2) as the slicer software. By setting different infill
densities and different infill patterns it was possible to obtain 8 samples with different
porosity.
Each one of these elements was tested with the rod both inserted completely and inserted
just one cm. The values that were obtained gave us the range of resistances that each element
was able of offering. Another parameter that was measured is the resistivity, that allowed us
to dimension the definitive cylinders for the test bench.
The housing of the porous element was designed to guarantee axial movement of the rod in
the hollow cylinder, at the same time minimizing little pressure drops and maintaining a
linear shape. The solution designed is shown in Picture I.2.

XIV
Picture I.2 CAD drawing of the resistance element. ½“ connector (1); Internal tube (2); Porous element (3); External
tube (4); Main rod (5); Support rod (6).
The main rod is held in place by a support rod that is fixed, through two diametrically
opposite holes, to the external tube. The main rod can shift through the hollow porous
cylinder by moving the external tube. This is also possible because two diametrically
opposite grooves were cut in the internal tube to allow the support rod to shift along. The
complete element was set up to be watertight with two O-rings put at opposite sides of the
grooves and two pieces of rubber on the external side of the support rod.
Compliant elements were designed to simulate the elastic properties of the circulatory
system. These elements were created by using closed air chambers (Windkessel chambers),
since the solution allows for regulation and they occupy reduced amounts of space.
To define the amount of air that had to be left in the chamber, assuming that the air within
behaved like a perfect gas, their related equations were used. It is also assumed that two
different polytrophic processes occur during use: isothermic and adiabatic.
Starting from the values obtained with the LPM, the chambers to be inserted in the circuit
were designed to simulate compliance values for patients with BSA of 0.56 m2. When
needed additional volumes (chambers) were connected to them, thus allowing to simulate
patients with BSA of 0.67 and 0.74 m2 as well.
Inertance elements, instead, are represented with connection tubing cut to the appropriate
length, thus allowing to simulate the fluid’s inertia.
Actuation and control system
As previously pointed out, the function of the heart has been achieved by using a ventricular
assist device (VAD) in place of the single ventricle.
This device needs a control system capable of regulating the air pressure in its chamber,
therefor controlling the stroke volume and output flow.

XV
In this project, a preexisting pneumatic circuit was used and a control system, managed by
Arduino, was designed and assembled (Picture I.3).
Picture I.3 Pneumatic air line to control the ventricle. (1) compressed air line; (2) regulator filter; (3) Mechanical valve;
(4) Pressure regulator; (5) 2-way solenoid valve; (6) vacuum generator; (7) 3-way solenoid valve; (8) control system; (9)
Ventricle.
As shown in Picture I.3, the circuit contains two solenoid valves that alternate systole and
diastole in the device that replicates the heart. The control system was designed with at the
heart an Arduino controller (ARDUINO MEGA 2560, Arduino LLC, Ivrea), because of its
ease of use and low price. The code that was implemented prompts the user to insert the
cardiac frequency and the relative systole duration. All is done through a display and numeric
keyboard fixed. The inputs given directly regulate the opening and closure of the solenoid
valves.
Circuit assembly
The test bench was assembled by connecting all the components with ½ “ tubes, as shown
in Picture I.4

XVI
Picture I.4 Mock loop of the pediatric cardiovascular circulation after Glenn surgery in patients with BSA of 0.56 m2. (1)
Simulated ventricle (25 ml EXCOR VAD, Berlin heart Gmbh, Berlin); (2) Aortic compliance; (3) Lower body resistance;
(4) Lower body compliance; (5) IVC resistance; (6) Upper body resistance; (7) Upper body resistance; (8) Adjustable
pulmonary resistance; (9) Fixed pulmonary resistance; (10) Pulmonary compliance; (11) Pulmonary vein resistance;
(12) First atriber; (13) Second atrium chamber.
Result analysis and discussion
With the circuit completely assembled, a different simulation was done for each BSA of
interest (0.56, 0.67 and 0.74 m2). Every simulation was executed with a heart rate of 100
bpm and with an average flow rate of 1.2 l/min, thus using the same parameters used in
Simulink. The pressure of each district was measured at the exit of every district, using
pressure sensors, while the flow rate was measured at the start of each district, using a
flowmeter sensor.

XVII
Picture I.5 shows the command pressure trend and the output flow rate from the ventricle.
Picture I.5 Command pressure and flow rate at the exit of the ventricle for a BSA of 0.56 m2.
Command pressure in air line vary for each BSA that is simulated. It must be pointed out
that the ventricle used for this project had a stroke volume of 25 ml, therefore to give the
correct output flow rate, it wasn’t used at its optimal conditions. This caused the anomalies
in the trend of the command pressure.
Picture I.6 and Picture I.7 show the comparison between the experimental and computational
data of the output flow rate from the ventricle for BSA of 0.56 m2.
-40-20020406080100120140160180200
-1
0
1
2
3
4
5
0 0,5 1 1,5 2
Pre
ssio
ne
[m
mH
g]
Flo
w r
ate
[l/
min
]
Time [s]
Comand pressure and flow rate at the exit of
the ventricle - BSA 0.56 m2
Flow rate
Pressure

XVIII
Picture I.6 Comparison between the output flow rate of the ventricle measured on the test bench and the LPM in
Simulink. Experimental values for a BSA of 0.56 m2: �� = 1.35 l/min, Qmax = 4.49 l/min.
As can be seen from the graph, the experimental curve is similar to the computational one
proposed by Swanson and Clark, even though the maximum value measured on the test
bench is higher.
Picture I.7 Comparison between the aortic pressure measured on the test bench and the LPM in Simulink for a BSA of
0.56 m2. Maximum, minimum and medium pressure for the test bench: �� = 55.88 mmHg, Pmax = 74.04 mmHg, Pmin =
38.25 mmHg. Maximum, minimum and medium pressure for the LPM: �� = 56.77 mmHg, Pmax = 71.95 mmHg, Pmin =
40.33 mmHg.
-1
0
1
2
3
4
5
6
7
8
0 0,5 1 1,5 2 2,5 3 3,5 4
Flo
w r
ate
[l/
min
]
Time [s]
Comparison between output flows - BSA 0.56 m2
Experimental
Simulink
0
10
20
30
40
50
60
70
80
0 0,5 1 1,5 2 2,5 3 3,5 4
Flo
w r
ate
[m
mH
g]
Time [s]
Comparison between aortic pressures - BSA 0.56
m2
Simulink
Experimental

XIX
As for the flow rate, even the pressure curves are similar, both as general trend and values.
This is also valid for the upper, lower and pulmonary districts.
The last analysis that was done, was to verify that pressure and flow rate curves had a
dampened trend as the signal measuring got closer to the atrium. This was obtained by using
a dual chamber atrium, that allowed to dampen the input oscillations to ventricle. Pressure
and flow rate readings were taken on both the entrance tubes to the first atrium chamber.
Conclusions and future outcomes
In the present work, a test bench to mock the circulatory system of pediatric patients with
hypoplastic left heart syndrome after the Glenn procedure, was designed and constructed.
The design phase started with the development of the LPM, that assumed the important role
of giving the necessary values to design the physical elements of the circuit. Furthermore,
simulations with the LPM gave the pressure and flow rate curves that were used to analyze
the experimental data. A comparison between the computational and experimental data was
done to verify the precision of the test bench.
Both the pressure and flow rate curves follow the trend of the computational ones and have
comparable mean values. The test bench is therefore a versatile tool, that allows to simulate
three different types of patients (BSA of 0.56, 0.67 and 0.74 m2) by adjusting the resistances
and connecting additional volumes to the compliant chambers. All of which can be done
without dismantling the existing circuit. The control system also allows for great flexibility,
giving the user the opportunity of setting the desired heart rate and relative systole duration.
As a future outcome, this test bench can be used to evaluate the conditions of a patient, both
in the early phases after the Glenn surgery and in the late phases. This can be done by
blocking one of the two branches of the pulmonary resistances.
Since every element can be regulated to simulate different conditions, this mock loop could
be used to study the effects of certain cardiac pathologies, such as systolic insufficiency,
diastolic insufficiency and pulmonary hypertension. Another possible use could be to use
the circuit to study the effects of assisted circulation by using a second VAD to aid the single
ventricle. Analyzing pressure and flow rate curves, the mock loop could also be used to study
the effect of different types of incannulation.
As a final possible outcome, the tool developed in this thesis could be used to study the effect
of the Glenn and Fontan procedure on patients with different BSA. This can be easily

XX
achieved by reconnecting the proximal tube of the after the IVC before the pulmonary distric,
thus obtaining the Fontan circuit.

1
1 Fisiopatologia del sistema cardio-circolatorio
La progettazione e la costruzione di un banco prova, adibito allo studio della circolazione
patologica pediatrica, presuppone la conoscenza del sistema cardio-circolatorio. In questo
capitolo viene illustrata la fisiologia di questo sistema, soffermandosi sulla costituzione e
sulle proprietà dei vasi sanguigni che dovranno essere replicate nel banco prova. Vengono
inoltre illustrate le patologie cardiache, in particolare, quelle che rendono necessario
l’utilizzo di dispositivi di assistenza ventricolare. Si focalizza quindi l’attenzione sulle
patologie congenite e vengono presentate le tecniche chirurgiche al momento utilizzate per
sopperire alla mancanza di una corretta circolazione. Il banco prova infatti, dovrà replicare
la circolazione ottenuta dopo l’intervento di Glenn che rappresenta il secondo passo dell’iter
seguito per ripristinare una corretta circolazione, in caso il paziente presenti uno dei
cosiddetti difetti a “ventricolo unico”. In queste malformazioni, infatti, uno dei due ventricoli
risulta poco sviluppato e l’altro, da solo, provvede ad entrambe le circolazioni sistemica e
polmonare.
2
Sistema circolatorio
Il sistema circolatorio è formato dal cuore, dai vasi sanguigni e dal sangue e può essere
assimilato ad un circuito idraulico chiuso in cui una pompa (il cuore) imprime su di un fluido
(il sangue) la forza necessaria per permettere il suo movimento all’interno dei condotti (i
vasi).
Le funzioni principali di questo sistema sono:
• la distribuzione di sostanze nutritive e di ossigeno a tutte le cellule
dell’organismo;
• la rimozione dei prodotti di scarto provenienti dal metabolismo cellulare, che
vengono convogliati agli organi deputati alla loro eliminazione;
• la termoregolazione dell’organismo;
• la protezione del sistema attraverso l’emostasi che consiste nella capacità
delle piastrine di creare dei coaguli, che impediscono emorragie in caso di
danneggiamento di vasi;
• la difesa immunitaria che viene attuata dai globuli bianchi e dagli anticorpi in
grado di captare ed eliminare le sostanze nocive per l’intero organismo;
• il controllo omeostatico ossia la contribuzione del sistema circolatorio al
mantenimento dell’equilibrio dei parametri interni all’organismo.
Nei successivi paragrafi vengono riportate le caratteristiche principali degli elementi
costituenti il sistema circolatorio.
1.1.1 Il cuore
Il cuore è un organo muscolare cavo posto al centro della cavità toracica avvolto in una
sottile sacca membranosa chiamata pericardio. La cavità pericardica è composta da due
foglietti: l’epicardio che aderisce al cuore e il pericardio propriamente detto, che,
circondando l’epicardio, forma una cavità virtuale in cui il cuore può muoversi liberamente
durante la contrazione cardiaca.
Le sue dimensioni sono pari a quelle di un pugno chiuso e il suo peso varia tra i 250-300
grammi nella donna e tra i 300-350 grammi nell’uomo [2].
Il cuore è strutturato in quattro camere cardiache, due atri e due ventricoli e può essere
suddiviso in due parti: cuore destro e cuore sinistro. Tra di esse non persiste alcuna

3
comunicazione per la presenza del setto interatriale e interventricolare. Nell’atrio destro
tuttavia si nota una cicatrice corrispondente alla chiusura del foro ovale di Botallo che
durante la vita intrauterina consente la comunicazione tra le due metà.
Tra ogni atrio e ogni ventricolo è presente una valvola detta di aspirazione o atrioventricolare
che, durante la diastole risulta aperta per permettere il riempimento ventricolare mentre, in
fase di sistole, è chiusa per evitare che il sangue torni nell’atrio invece di andare in circolo.
Esistono poi altre due valvole poste tra i ventricoli e le grandi arterie (aorta e arteria
polmonare) chiamate valvole di mandata o semilunari. Queste, in fase di diastole sono chiuse
per evitare il reflusso di sangue nel cuore mentre, durante la sistole si aprono per permettere
l’eiezione del sangue verso il circolo sistemico.
Tutte le valvole si aprono e si chiudono passivamente secondo gradiente pressorio,
assicurando in questo modo il flusso unidirezionale del sangue (Figura 1.1).
Figura 1.1 Anatomia del cuore.
Il cuore è in grado di contrarsi spontaneamente e ritmicamente grazie alla presenza di
particolari cellule all’interno dei tessuti che lo compongono, dette cellule pacemaker.
Le cellule Pacemaker sono in grado di stimolare la contrazione del cuore perché riescono ad
eccitarsi autonomamente senza essere innervate. Esse dunque controllano la frequenza
cardiaca producendo dai 60 ai 100 segnali al minuto.
I tessuti che compongono il cuore sono:
• il tessuto nodale in cui risiedono le cellule pacemaker capaci di autoeccitarsi;
• il tessuto di conduzione che trasmette gli impulsi nati nel tessuto nodale al tessuto
contrattile;

4
• il tessuto contrattile che risponde con effetti meccanici agli stimoli che riceve.
In Figura 1.2 è rappresentato il percorso seguito dall’onda di depolarizzazione.
Figura 1.2 Percorso seguito dall'onda di depolarizzazione nel cuore.
Lo stimolo elettrico nasce a livello del nodo senoatriale e tramite le vie internodali raggiunge
rapidamente il nodo atrioventricolare. A questo punto la depolarizzazione si propaga più
lentamente verso gli atri. La conduzione si sposta, poi, verso l’apice cardiaco attraverso il
sistema di conduzione ventricolare. Infine lo stimolo viene propagato dall’apice verso la
base del cuore.
Il ciclo cardiaco rappresenta la risposta meccanica associata alla propagazione dello stimolo
elettrico; esso viene rappresentato in Figura 1.3.

5
Figura 1.3 Rappresentazione del ciclo cardiaco. 1.Fase tardiva della diastole: atri e ventricoli sono rilassati, il 70 % del
riempimento ventricolare avviene per gravità; 2. Sistole atriale: la contrazione degli atri spinge la restante quantità di
sangue nei ventricoli; 3. Contrazione ventricolare isovolumica: la prima fase della contrazione ventricolare determina la
chiusura delle valvole atrioventricolari ma non crea una pressione sufficiente ad aprire le valvole semilunari. 4.Eiezione
ventricolare: la pressione ventricolare aumenta progressivamente e, una volta superata quella delle arterie, permette
alle valvole semilunari di aprirsi e al sangue di fuoriuscire dal cuore. 5.Rilasciamento ventricolare isovolumico: quando
i ventricoli si rilasciano la pressione al loro interno diminuisce, il sangue refluisce verso i lembi delle valvole semilunari
e ne determina la chiusura.
Il ciclo cardiaco può anche essere rappresentato attraverso un diagramma pressione-volume
(PV-loop) come riportato in Figura 1.4.

6
Figura 1.4 Diagramma pressione-volume per un ciclo cardiaco.
L’area compresa nel PV-loop rappresenta il lavoro compiuto dal cuore durante il ciclo ed è
calcolabile tramite la relazione:
� = � � ∗ � 1.
Si può stimare un lavoro del cuore a riposo di circa 0.8 W.
Per studiare la funzionalità del cuore è necessario prendere in considerazione alcune variabili
tra cui il volume sistolico VS (stroke volume) e la gittata cardiaca GC (cardiac output).
Il volume sistolico rappresenta la quantità di sangue pompata da ciascun ventricolo ad ogni
sistole mentre, la gittata cardiaca corrisponde alla quantità di sangue eiettata al minuto.
Questi due parametri sono direttamente proporzionali tra di loro, a meno di una costante che
corrisponde alla frequenza cardiaca (f).
� = � ∗ � 2.
La gittata cardiaca in un adulto è circa 5 l/min, ma può aumentare in alcune situazioni come
per esempio durante l’esercizio fisico. Questo parametro risulta fondamentale per lo studio
della funzione cardiaca in quanto il cuore può essere assimilato ad una pompa e il suo
compito principale è quello di assicurare un adeguato flusso di sangue al fine di irrorare tutti
gli organi.

7
La variazione della gittata cardiaca è governata da meccanismi intrinseci ed estrinseci.
Durante l’esercizio fisico, per esempio, si chiudono le arteriole di alcuni distretti, mentre si
dilatano quelle del distretto cardiaco e del muscolo scheletrico interessato. Esistono due
meccanismi intrinseci in grado di consentire al miocardio l’adattamento a questa variazione
di richiesta di ossigeno: il meccanismo di Frank-Starling e la modulazione della contrattilità
indotta dalla frequenza.
La legge di Frank Starling afferma che la tensione attiva sviluppata nel passaggio dalla fase
di rilasciamento a quella di contrazione dipende dalla lunghezza iniziale delle fibre del
miocardio. È possibile, dunque, osservare come ad un aumento del riempimento diastolico
corrisponda un maggior stiramento delle fibre miocardiche e quindi una contrazione più
efficace, che si traduce in una maggior quantità di sangue pompata nelle arterie. Si può
quindi affermare che, entro i limiti fisiologici, il cuore pompa tutto il sangue che gli perviene
evitando un suo eccessivo ristagno nelle vene.
Per quanto riguarda i meccanismi estrinseci in grado di modulare il valore della gittata
cardiaca bisogna considerare che il cuore è riccamente innervato da fibre simpatiche e
parasimpatiche, in grado di controllare la frequenza e la sua
forza di contrazione.
Infine, oltre all’azione del sistema nervoso anche il controllo ormonale può variare i
parametri associati alla funzionalità cardiaca.
1.1.2 I vasi sanguigni
I vasi sanguigni formano un sistema chiuso di tubi e la loro funzione principale è quella di
convogliare il sangue verso tutti i tessuti del corpo per distribuire le sostanze nutritive e
raccogliere i cataboliti [3].
La parete vascolare è costituita da un tessuto dalla struttura particolarmente complessa e
diversificata da zona a zona in relazione alla specifica funzione richiesta. In termini generali
la parete di ogni segmento vascolare è costituita da tre strati concentrici che dall’interno
verso l’esterno sono la tonaca intima, la media e l’avventizia (Figura 1.5).

8
Figura 1.5 Struttura interna dei vasi sanguigni.
L’intima è costituita da un singolo strato di cellule endoteliali che sono direttamente in
contatto con il sangue che scorre nel vaso. Fra l’intima e la media è interposta la lamina
elastica interna costituita da lamine di elastina.
La media costituisce generalmente lo strato più spesso della parete ed ha strutture differenti
nelle diverse parti del sistema vascolare.
La tonaca avventizia, infine, è separata dalla tonaca media da una ulteriore lamina elastica,
che può avere lo stesso spessore della media ed è composta prevalentemente da fasci di fibre
di collagene non compatti in direzione longitudinale.
La tonaca avventizia è inoltre attraversata da fibre nervose e vasi linfatici. Nel caso di vasi
di grandi dimensioni la tonaca avventizia è perfusa da un sistema di piccoli vasi detti “vasa
vasorum”, deputati al trasporto di O2 e sostanze nutrienti ai tessuti della parete del vaso. I
vasa vasorum sono presenti quando le dimensioni del vaso sono tali che la distanza tra le
cellule della parete e il sangue che scorre all’interno del vaso risulti superiore a circa 25 μm.
I vasi sanguigni si dividono in arterie, vene e capillari, diversi per composizione e
dimensione come mostrato in Figura 1.6.

9
Figura 1.6 Rappresentazione schematica delle caratteristiche di ciascun tipo di vaso.
Le arterie sono preposte alla distribuzione del sangue nei tessuti periferici. In base alle loro
dimensioni si possono distinguere tre principali tipi di arterie. Le grandi arterie elastiche
(avente diametro maggiore di 7-8 mm) sono essenzialmente l’aorta e i suoi rami principali e
sono caratterizzate da una parete molto spessa. Nella tonaca media sono presenti quasi
esclusivamente lamine elastiche. In virtù della propria elasticità, queste arterie svolgono
l’azione di secondo cuore: durante la sistole cardiaca sequestrano, dilatandosi per effetto
della pressione arteriosa, parte del sangue eiettato dal ventricolo e lo restituiscono in fase di
diastole quando tornano al loro calibro iniziale. In questo modo smorzano la natura pulsatile
del flusso sanguigno generato dalla pompa ventricolare. Il risultato netto dal punto di vista
energetico è l’abbassamento delle resistenze all’efflusso sistolico in quanto le arterie
accolgono parte rilevante (30-40 %) della gittata cardiaca e quindi il sistema vascolare a
valle è soggetto a un flusso continuo, situazione che comporta nella media del ciclo cardiaco
perdite di carico minori rispetto ad una situazione pulsatile.
Le arterie muscolari distribuiscono il sangue ai vari organi. Esse svolgono un’importante
funzione di vasoregolazione attiva, mentre hanno un’estensibilità passiva modesta se
confrontata con quella delle grandi arterie. Queste arterie hanno in proporzione la tonaca
media più spessa rispetto alle arterie di grande calibro, ed essa è costituita prevalentemente
da cellule muscolari lisce. Le cellule muscolari lisce hanno il compito di ridurre il lume del

10
vaso e quindi aumentare la resistenza al flusso nel caso si renda necessaria una minore
perfusione del distretto servito dall’arteria.
Le piccole arterie o arteriole hanno un calibro che varia tra i 20 e i 100 μm. La tonaca media
è formata da uno o due strati di muscolo liscio con poche fibre elastiche. Il muscolo liscio è
organizzato a spirale intorno ad uno strato interno di cellule endoteliali.
A differenza delle arterie le vene sono i vasi che conducono il sangue dalle reti capillari dei
diversi organi al cuore, hanno forma cilindrica, parete relativamente sottile e lume ampio. Il
loro calibro è sempre maggiore di quello delle arterie nel medesimo distretto ma la loro
struttura è simile nonostante lo spessore della parete sia minore e la tonaca media contenga
molta meno elastina. Le vene accolgono il 65% del sangue totale che scorre nel nostro corpo
e, a differenza delle arterie, possono facilmente collassare per effetto di un’elevata pressione
esterna.
Per evitare il reflusso del sangue questi vasi presentano al loro interno delle valvole che
garantiscono l’unidirezionalità del fluido, dette “valvole a nido di rondine”.
Le vene possono avere decorso superficiale o profondo; le prime sono disposte nel
sottocutaneo, non corrono in contiguità delle arterie corrispondenti e sono più sviluppate a
livello degli arti e del collo; le seconde si accompagnano ad arterie e decorrono negli spazi
intermuscolari e nei visceri.
Si distinguono in funzione delle dimensioni tre tipi di vene: vene di piccolo medio e grosso
calibro.
Infine i capillari sono i vasi più piccoli della circolazione, hanno un calibro compreso tra 5
e 20 μm e una lunghezza media di 1 mm. Essi costituiscono il sito di scambio di gas e
nutrienti tra i tessuti e il sangue. Sono costituiti da endotelio e lamina basale. In alcuni casi
è sufficiente una sola cellula endoteliale per rivestire l’intera circonferenza della loro parete.
Non sono presenti negli epiteli di rivestimento, nella cornea, nel cristallino e nelle cartilagini.
I capillari formano reti tridimensionali dette letti capillari che hanno origine da una arteriola
e terminano in una venula.
1.1.3 Il sangue
Il sangue è un tessuto connettivo fluido che, scorrendo nei vasi sanguigni, svolge la funzione
di trasporto. In esso si evidenzia una parte liquida, il plasma (55%) e una componente
corpuscolata formata da globuli rossi, globuli bianchi e piastrine.
11
Il plasma è costituito prevalentemente da acqua (90%), sali minerali e proteine a basso peso
molecolare.
Per quanto riguarda la parte corpuscolata i globuli rossi, detti anche eritrociti, sono le cellule
anucleate più numerose del sangue. Essi vengono prodotti nel midollo osseo e hanno la
forma di un disco biconcavo, con diametro di 7-8 μm. Al loro interno si trova l’emoglobina
(Hb), una proteina globulare specializzata nel legare molecole di ossigeno e anidride
carbonica. La concentrazione fisiologica di Hb nel sangue è compresa tra 13-15 g/dl di
sangue. Al di sotto di questo valore si ha la condizione di anemia, mentre al di sopra di
poliglobulia.
I globuli bianchi, detti anche leucociti, sono invece cellule contenenti un nucleo, più grandi
ma meno numerose dei globuli rossi. Sono anch’essi prodotti dal midollo osseo emopoietico,
e la loro funzione è quella di difendere l’organismo dalla presenza di agenti patogeni quali
batteri e virus.
Le piastrine, infine, svolgono un ruolo essenziale nella coagulazione del sangue. Quando un
vaso sanguigno viene danneggiato esse vengono richiamate nella zona interessata e si
aggregano aderendo alla parete del vaso. Liberando enzimi, tra cui la trombina che trasforma
il fibrinogeno in fibrina, esse modulano la formazione di tessuto temporaneo. Aggregati di
fibrina formano un coagulo, ossia matrice temporanea che funge da impalcatura per le cellule
che nelle fasi successive alla risposta immunitaria porteranno alla riparazione del tessuto.
La circolazione di tale tessuto può essere descritta seguendo il percorso del sangue eiettato
dal ventricolo destro.
Il ventricolo destro pompa il sangue nei polmoni attraverso l’arteria polmonare, la quale si
dirama in due appena dopo l’uscita dal cuore. Mentre scorre attraverso i capillari polmonari,
il sangue libera CO2 e assorbe O2. Il sangue ricco di ossigeno torna al cuore mediante le
vene polmonari ed entra in esso attraverso l’atrio sinistro. Dopo essere passato dall’atrio al
ventricolo sinistro attraverso la valvola mitrale, il sangue scorre nell’aorta che, ramificandosi
in numerose arterie, lo distribuisce tra i vari distretti corporei. Le arterie immettono il sangue
nelle arteriole che a loro volta si diramano nei capillari. I capillari irrorano i tessuti liberando
le sostanze nutritive e convogliano il sangue nelle venule, dalle quali esso affluisce alle vene.
Il sangue venoso proveniente dalla parte superiore del corpo confluisce nella vena cava
superiore, mentre la vena cava inferiore (IVC) raccoglie il sangue proveniente dalla parte
inferiore del corpo. Queste due vene confluiscono nell’atrio destro. Infine, passando

12
dall’atrio al ventricolo destro attraverso la valvola tricuspide, il sangue può ricominciare il
suo percorso (Figura 1.7).
Figura 1.7 Sistema cardiocircolatorio.
La rete di vasi percorsa dal sangue può essere divisa in due circolazioni: quella sistemica,
detta anche grande circolazione, e quella polmonare chiamata piccola circolazione.
La circolazione sistemica comprende il tratto del circuito che inizia dal ventricolo sinistro e
termina nell’atrio destro. Può essere divisa in circolazione sistemica inferiore e superiore.
La prima porta le sostanze nutritive agli organi del tronco, reni, visceri, pelvi e arti inferiori.
La seconda invece raggiunge gli arti superiori e la testa.
La circolazione polmonare rappresenta il tratto del sistema che parte dal ventricolo destro e
termina nell’atrio sinistro. La funzione principale di questo tratto è quella di ossigenare il
sangue e rimuovere C02.
In condizioni fisiologiche il volume totale di sangue è distribuito tra circolazione sistemica
e polmonare in rapporto 2:1. Questo rapporto è mantenuto costante, ma se la regolazione
non è operante, per esempio in caso di insufficienza cardiaca, la ripartizione può essere
alterata e la quota nel circolo polmonare può aumentare.

13
È importante sottolineare come il cuore possa essere assimilato a due pompe in serie,
sincrone con un’azione intermittente: durante la fase di compressione (sistole) il sangue
viene spinto da ciascuna camera verso il rispettivo sistema arterioso, mentre nella fase di
dilatazione (diastole) nuovo sangue viene aspirato dal letto venoso.
Ciò che spinge il sangue nel sistema circolatorio è il gradiente di pressione. Il sangue infatti
si muove da regioni a pressione maggiore verso regioni a pressione inferiore. La pressione
media aortica è di circa 90 mmHg, mentre quella in vena cava, in corrispondenza della sua
congiunzione con il cuore è prossima a zero.
La pressione media arteriosa è proporzionale alla gittata cardiaca e varia a seconda delle
resistenze periferiche (Figura 1.8).
Figura 1.8 Relazione tra pressione arteriosa, gittata e resistenza.
La legge con cui si può descrivere il moto del sangue nei vasi è la legge di Poiseuille. Essa
si riferisce ad un modello semplificato dove vigono le seguenti ipotesi:
• il condotto è cilindrico, rigido, ha lunghezza l e raggio R;
• il fluido che scorre all’interno del condotto è spinto dal gradiente pressorio;
• la viscosità del fluido è costante (fluido Newtoniano);
• la velocità del fluido è nulla alle pareti del condotto, mentre raggiunge il suo massimo
al centro, assumendo dunque un profilo di tipo parabolico;
• si è regime stazionario;
• il fluido scorre all’interno del condotto con flusso laminare.
Sotto queste ipotesi la legge di Poiseuille stabilisce una proporzionalità tra il gradiente
pressorio ΔP e la portata Q e può essere espressa tramite la seguente formula:

14
�� = 8��� � 3.
La portata di un fluido rappresenta il volume di liquido che attraversa la sezione del condotto
nell’unità di tempo e può essere calcolata moltiplicando il valore dell’area trasversale dello
stesso condotto per la velocità del fluido.
� = ∙ � 4.
In caso di moto stazionario la portata è costante nel tempo, mentre in presenza di moto
pulsatile essa varia in modo periodico. In caso di moto stazionario si può dunque affermare
che al diminuire della sezione di scorrimento la velocità del flusso aumenti.
In condizioni fisiologiche il flusso pulsatile proprio della gittata cardiaca viene trasformato
in un flusso continuo che garantisce una portata costante anche in assenza di pompaggio
ventricolare.
Questo fenomeno è dovuto alla distensibilità delle grandi arterie che durante la diastole, a
seguito del recupero elastico, tornano nella configurazione di riposo restituendo l’energia al
sangue sotto forma di pressione. L’effetto della distensibilità arteriosa è chiamato anche
effetto Windkessel. Ciò, permette dunque di affermare che all’aumentare della sezione
trasversale, la velocità del sangue diminuisce. Di conseguenza la velocità è minore a livello
dei capillari e ciò favorisce gli scambi di nutrienti con i tessuti circostanti (Figura 1.9).

15
Figura 1.9 Andamento dell'area della sezione trasversale e della velocità del flusso sanguigno nei diversi vasi del
sistema circolatorio.
Una condizione da rispettare affinché la legge di Poiseuille possa essere applicata per il
sangue è la laminarità del flusso.
Sperimentalmente si osserva che, se la velocità del fluido aumenta sopra una certa soglia, la
formula di Poiseuille cessa di descrivere adeguatamente il moto. Questa velocità, chiamata
velocità critica rappresenta il punto di passaggio tra moto laminare e turbolento e dipende
dalla viscosità del fluido (µ), dal raggio del condotto (r), dalla densità del fluido (ρ) nonché
da una costante adimensionale detta numero di Reynolds (Re).
���� = �� � 5.
Per i fluidi molto viscosi la velocità critica è piuttosto elevata: nell’aorta assume il valore di
40 cm/s.
Considerando una portata di 5 l/min si ottiene una velocità media di 26.5 cm/s, inferiore
dunque alla velocità critica.
Per i rimanenti vasi il raggio è minore rispetto all’aorta e da ciò segue che la velocità critica
è maggiore di 40 cm/s, quindi il moto può essere considerato laminare anche in tutto il resto
del sistema. La turbolenza del flusso si verifica solo in prossimità delle valvole.
Infine per quanto riguarda l’ipotesi di fluido Newtoniano è importante sottolineare come
essa sia verificata per il sangue solo nei condotti di grosso calibro.

16
Inoltre, considerando la circolazione nel suo insieme, come illustrato in Figura 1.10, si può
svolgere un’ulteriore considerazione [4].
Figura 1.10 Schema del sistema circolatorio.
In un circuito idraulico chiuso, alimentato da una pompa intermittente, il flusso si mantiene
a patto che il volume emesso ad ogni pulsazione sia immediatamente restituito alla pompa,
caricandola così per la pulsazione successiva. Affinchè ciò avvenga, è necessario che il
circuito sia colmo di liquido. Un circuito parzialmente vuoto può infatti accogliere il volume
pulsatorio senza restituirlo. In conclusione, un prerequisito indispensabile per mantenere la
circolazione è che il volume di sangue riempia l’albero circolatorio.
Per soddisfare questa necessità, se ne impone però una seconda. Dato che ad ogni sistole il
cuore immette il suo contenuto nei vasi, è necessario che questi, pur essendo pieni, siano in
grado di accogliere temporaneamente il volume pulsatorio, in attesa di restituirlo al cuore
durante la dilatazione diastolica. Poiché i liquidi sono incomprimibili, l’eccesso di volume
può essere accolto dal circuito idraulico solo se le pareti dei suoi condotti sono elastiche e
dilatabili. Un secondo prerequisito al mantenimento del circolo è dunque la cedevolezza
elastica delle pareti dei condotti.
Malattie cardiache congenite
Le principali patologie cardiache possono essere divise in tre categorie: le cardiomiopatie,
le malattie infiammatorie e le malattie cardiache congenite.
Le cardiomiopatie rappresentano un gruppo eterogeneo di patologie del miocardio associate
a disfunzioni meccaniche e/o elettriche che tipicamente portano a ipertrofia o dilatazione [5].
Le malattie infiammatorie che riguardano il cuore sono principalmente tre: miocardite,
pericardite, endocardite [6]. La prima è anche nota come cardiomiopatia infiammatoria ed è

17
tipicamente dovuta ad infezione virale [7] o batterica. La seconda, invece, è una patologia
che riguarda l’infiammazione del pericardio, ossia della sacca che circonda il cuore e ne
permette una lubrificazione ottimale. Infine, la terza è una patologia infiammatoria che
colpisce lo strato più interno del tessuto cardiaco detto endocardio.
Le patologie congenite, a cui viene rivolta l’attenzione in questo lavoro di tesi, colpiscono
la struttura del cuore e sono presenti sin dalla nascita; esse possono interessare le pareti, le
valvole o i vasi direttamente connessi all’organo [8]. Queste malattie possono essere
asintomatiche, ma nel caso portino ad alterazione della normale circolazione, le conseguenze
possono essere anche mortali e rendere necessari interventi chirurgici o terapie mediche.
L’incidenza di tali patologie è stata valutata tra 12 e 14 casi ogni 1000 nati vivi. Per quanto
riguarda le patologie congenite che richiedono trattamenti cardiologici specializzati,
l’incidenza si abbassa a 2.5 - 3 ogni 1000 nati vivi come riportato nello studio di Julien I. E.
Hoffman et al. [9] . Bisogna infatti tenere conto che alcuni difetti congeniti riescono a
chiudersi spontaneamente come per esempio i difetti intra-ventricolari e intra-atriali.
I neonati affetti da patologie congenite mostrano un cuore non formato correttamente al
momento della nascita, e possono presentare difetti semplici come fori passanti nel setto o il
restringimento di una valvola che rallenta il passaggio di sangue. Esistono però anche difetti
complessi che vedono la combinazione di diversi difetti come ad esempio la tetralogia di
Fallot. Solitamente queste malformazioni non causano dolore al petto, ma hanno come
principali sintomi l’iperventilazione, la cianosi o stanchezza [8].
Le cause di tali anomalie non sono ancora state comprese a fondo, ma si crede che esse
vadano ricercate nel codice genetico. È infatti crescente l’importanza che viene data ad
alterazioni geniche nel causare patologie congenite cardiache [10]. Mutamenti del DNA
spontanei, come delezione o traslocazione, sono le alterazioni più comuni ritenute cause
scatenanti di difetti come la tetralogia di Fallot. Inoltre, come mostrato nello studio di J.W.
Roos-Hesselink [11], la trisomia del cromosoma 21, 13 o 18 sono le sindromi che più
frequentemente vedono anche una concomitante malattia cardiaca congenita.
Nei paragrafi successivi verranno analizzate singolarmente le diverse patologie cardiache
congenite al momento conosciute.

18
Difetti del setto
Il setto è la parete che separa il cuore sinistro dal cuore destro, ed è distinto in due sezioni:
setto interatriale e setto interventricolare. Il setto ventricolare è diviso a sua volta in setto
interventricolare muscolare che corrisponde alla parte inferiore più spessa, e in setto
ventricolare membranoso che corrisponde alla parte superiore che appare più sottile e fibrosa
(Figura 1.11).
Figura 1.11 Sezione del cuore con enfasi su ventricoli e setto ventricolare.
Il setto interatriale si forma durante il primo e il secondo mese di sviluppo fetale. La sua
funzione nel neonato sarà quella di separare i due atri ed impedire che il sangue ossigenato
si mescoli con quello venoso. Durante il periodo di formazione si creano due fori (difetti)
fisiologici che permettono il passaggio di sangue tra gli atri. Con il crescere del feto e del
setto si forma una continuazione del difetto che prende il nome di Forame ovale. Alla nascita,
nel 75% dei casi, questo difetto si sigilla autonomamente, ma può rimanere pervio portando
all’omonima patologia cardiaca (Forame ovale pervio) [12].
Difetto del setto interatriale
Il difetto del setto inter-atriale è un foro che rimane pervio tra i due atri, permettendo il
passaggio di una parte di sangue, ricco d’ossigeno, dall’atrio sinistro all’atrio destro (Figura
1.12).

19
Figura 1.12 Flusso sanguigno in un cuore normale e in uno affetto da difetto interatriale.
In base alla dimensione del difetto possono essere effettuati differenti interventi. Nel caso di
difetti di piccole dimensioni, il cuore è in grado di rigenerare sufficiente tessuto per
occludere il foro altrimenti, se il difetto è di dimensioni notevoli, il paziente deve essere
operato. La conseguenza principale a questa malformazione è la minor concentrazione di
ossigeno nel sangue arterioso che risulta inferiore ai valori fisiologici. Il principale sintomo
di questa patologia è la mancanza di fiato dopo esercizio lieve, ma in età adulta si può anche
verificare ictus. Una seconda conseguenza di tale difetto è che, formandosi un atrio comune,
si annulla la differenza di pressione tra i due atri.
È da notare che se le dimensioni del difetto sono ridotte non si hanno sintomi evidenti.
Difetto del setto intraventricolare
Se tra le camere ventricolari vi è un foro passante, si ha un difetto interventricolare. Il sangue
ossigenato che proviene dai polmoni può quindi ritornare al ventricolo destro e di
conseguenza essere rimandato verso i polmoni (Figura 1.13). Tale anomalia spesso può
modificare notevolmente l’emodinamica cardiaca. Quando le sue dimensioni diventano
importanti vi è una grossa quantità di sangue ossigenato che entra nel ventricolo destro. Ciò
porta ad un aumento del lavoro complessivo del cuore, necessario per poter soddisfare la
richiesta di nutrienti e di ossigeno da parte di tutti i distretti corporei.

20
Figura 1.13 Struttura e flusso sanguigno in cuore normale rispetto ad un cuore affetto da difetto intra-ventricolare.
Nell’80% dei casi il difetto è nella parte membranosa del setto e richiede un intervento
chirurgico per la sua chiusura. Questa anomalia è la più comune tra le patologie congenite
del cuore e ha un’incidenza tra i 2 e i 4 casi ogni 1000 nati vivi [9].
Canale atrioventricolare completo
Il difetto del setto atrioventricolare è caratterizzato da un difetto nel setto atriale, una sola
valvola atrioventricolare comune e un difetto interventricolare (Figura 1.14). È una patologia
congenita rara che riguarda circa il 3% delle malformazioni cardiache e ha un’incidenza di
2 casi su 10000 nati vivi [13]. Le conseguenze principali legate a questa anomalia sono
l’aumento di pressione e di volume del ventricolo destro e l’ipertensione polmonare.
L’intervento chirurgico deve essere effettuato entro i primi anni di vita in quanto
l’ipertensione polmonare diventa irreversibile con il progredire del tempo.

21
Figura 1.14 Flusso sanguigno in un cuore che presenta un canale atrioventricolare.
Ostruzione del tratto di uscita ventricolare
Le patologie ostruttive del tratto di uscita ventricolare sono anomalie cardiache in cui l’uscita
del ventricolo destro o sinistro è ostruita e impedisce quindi al sangue di fuoriuscire. Possono
essere divise in anomalie del lato destro o sinistro. Le prime comprendono l’atresia
polmonare, la stenosi della valvola polmonare, la sindrome del cuore ipoplastico destro e la
tetralogia di Fallot. Le seconde comprendono la stenosi della valvola aortica, la stenosi
aortica supravalvolare, la coartazione dell’aorta e la sindrome del cuore ipoplasico sinistro.
Tetralogia di Fallot
La tetralogia di Fallot è la malformazione cianotica congenita del cuore più comune, ha
un’incidenza di circa 3 casi ogni 10000 nati vivi, e ammonta a circa il 7-10% di tutte le
malformazioni congenite del cuore. La diagnosi è pressoché immediata, i neonati infatti
presentano una diversa gradazione di cianosi a seconda del livello di ostruzione al flusso
[14].
Essendo una patologia complessa necessita obbligatoriamente di un intervento chirurgico
per poterne arginare le conseguenze.
Tale condizione vede l’effetto combinato di quattro difetti: stenosi della valvola polmonare;
difetto inter-ventricolare esteso; posizionamento dell’aorta direttamente sopra il difetto
intra-ventricolare, che causa il flusso diretto del sangue non ossigenato verso il circolo
sistemico; ipertrofia del ventricolo destro, dovuta al maggior lavoro richiesto dal lato destro
del cuore (Figura 1.15).

22
Il tipo di operazione chirurgica dipende dal livello di ostruzione della vena polmonare. Come
le altre malattie congenite, esiste un legame con il codice genetico. Come riportato da Apitz
[15], la delezione di una determinata sequenza cromosomica è stata riscontrata nel 25% dei
pazienti affetti da tetralogia di Fallot.
Figura 1.15 Struttura e flusso sanguigno in un cuore sano e uno affetto da tetralogia di Fallot.
Patologie valvolari
Le patologie valvolari possono colpire una delle quattro valvole cardiache e possono causare
tre diversi problemi: rigurgito, stenosi e atresia. Rispettivamente: il primo è dovuto alla
mancata chiusura dei lembi valvolari che quindi permettono un reflusso sanguigno; il
secondo è dovuto ad un inspessimento, irrigidimento o fusione dei lembi valvolari, che rende
difficoltosa l’apertura e quindi riduce la quantità di sangue che ne può scorrere attraverso; il
terzo è dovuto alla mancata pervietà valvolare, che impedisce quindi il passaggio di sangue.
La stenosi aortica vede il restringimento o della valvola di uscita dal ventricolo sinistro o
della zona sopra valvolare. La conseguenza diretta di questa patologia è la costrizione di
parte del sangue all’interno del ventricolo, aumentandone la pressione interna.
La stenosi polmonare è un’ostruzione al flusso dal ventricolo destro all’arteria polmonare ed
è tipicamente legata alla stenosi della valvola polmonare. Può avvenire in concomitanza con
altri difetti, come ad esempio nel caso della Tetralogia di Fallot.

23
L’atresia polmonare è una malformazione della valvola polmonare per cui il suo orifizio non
si sviluppa. Può essere accoppiata ad un difetto inter ventricolare che permette la fuoriuscita
del sangue dal ventricolo destro, altrimenti, se non ci fosse una via di uscita per il fluido, la
parte destra del cuore non contribuirebbe al circolo e rimarrebbe sottosviluppata.
La coartazione dell’aorta è una malformazione congenita cardiaca che riguarda l’aorta. In
presenza di questa condizione l’aorta si restringe nella zona in cui in età fetale si collega il
dotto di Botallo, diminuendo così la sezione di passaggio del sangue. Il cuore sinistro quindi
deve fornire più energia al sangue per superare la maggiore resistenza al flusso e dunque il
suo lavoro cresce notevolmente. Tale condizione può far sì che una quantità insufficiente di
sangue raggiunga i distretti inferiori del corpo.
Pervietà del dotto di Botallo
Il dotto di Botallo è un collegamento fisiologico che si forma prima della nascita. Esso
collega il tratto discendente dell’aorta prossimale all’arteria polmonare, in prossimità
dell’origine del ramo sinistro di quest’ultima [16] (Figura 1.16). Durante la prima settimana
di vita del neonato il dotto si chiude spontaneamente. Per via di mutazioni genetiche può
succedere che il dotto di Botallo rimanga pervio, portando alla manifestazione della
omonima patologia congenita. Questa anomalia è abbastanza comune e, per neonati non
prematuri, l’incidenza è di 1 ogni 500 – 1000 nati vivi [9]. Nei pazienti affetti da tale
patologia, il collegamento tra l’arteria polmonare e l’aorta fa sì che parte del sangue
ossigenato venga mandato verso i polmoni, aumentando così la pressione polmonare e
riducendo la portata sistemica.

24
Figura 1.16 Rappresentazione del dotto arterioso pervio.
Anomalia di Ebstein
L’anomalia di Ebstein è una malformazione congenita rara per cui il neonato presenta i lembi
settali e posteriori della valvola tricuspide spostati verso l’apice del ventricolo destro. Il
lembo anteriore invece può contenere fenestrazione e avere delle corde tendinee corte e
deboli. La causa è legata ad una mancata delaminazione dei lembi valvolari, che porta la
valvola a manifestare una grave insufficienza. Questa patologia incide su una popolazione
molto ristretta di neonati [9], [17] Tipicamente viene riconosciuta per la marcata cianosi del
neonato, la presenza di aritmie e l’improvvisa morte cardiaca; è bene notare che in ogni caso
la maggior parte dei bambini affetti da questa anomalia sopravvive fino all’adolescenza o
fino all’età adulta. È importante che il paziente venga controllato periodicamente, e che limiti
il suo esercizio fisico, in quanto la condizione di Ebstein può essere legata ad un
ridimensionamento del cuore. Il trattamento è simile a quello che ricevono pazienti affetti
da endocarditi, siccome l’opzione chirurgica di sostituzione o riparazione della valvola
tricuspide non ha ancora mostrato risultati convincenti in termini di efficacia.
Tronco arterioso comune
La patologia del tronco arterioso comune è caratterizzata dalla mancata formazione del setto
che fisiologicamente divide il tronco arterioso in tronco polmonare e tronco aortico (Figura
1.17). Questa malformazione è associata alla presenza di un grosso difetto nel setto
interventricolare che permette il mescolamento del sangue proveniente dal circolo sistemico
con quello proveniente dal circolo polmonare. Il trattamento di tale patologia deve essere
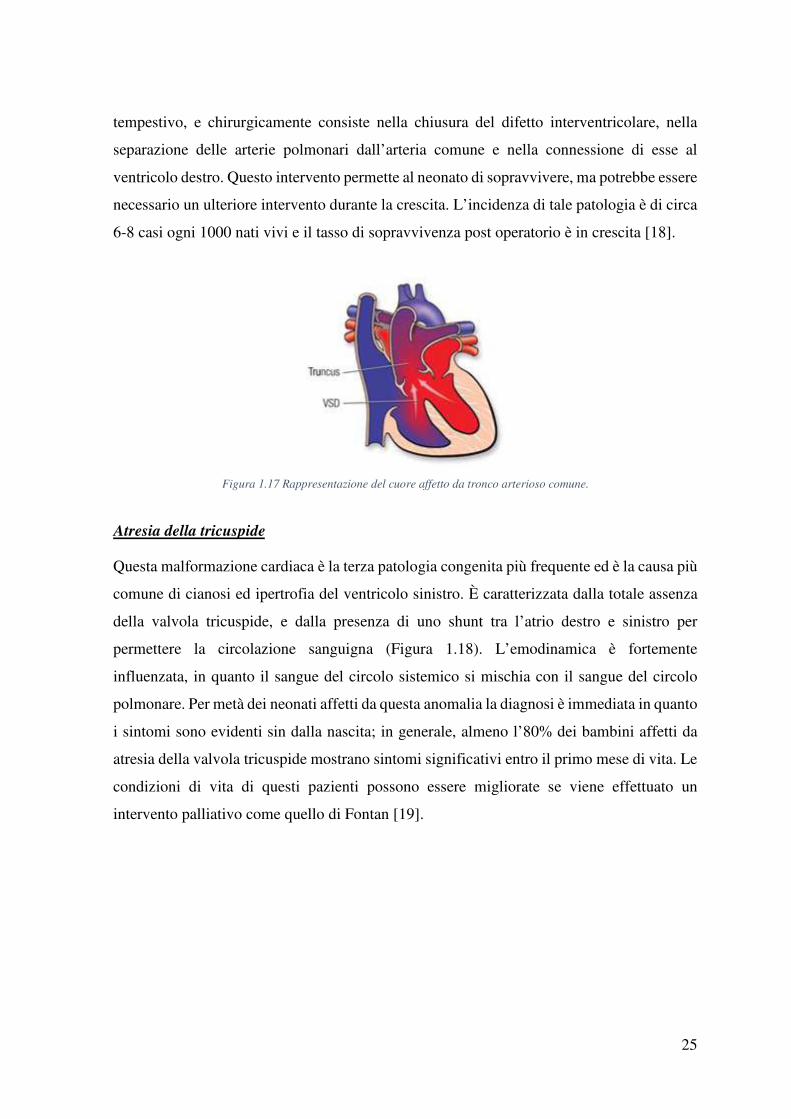
25
tempestivo, e chirurgicamente consiste nella chiusura del difetto interventricolare, nella
separazione delle arterie polmonari dall’arteria comune e nella connessione di esse al
ventricolo destro. Questo intervento permette al neonato di sopravvivere, ma potrebbe essere
necessario un ulteriore intervento durante la crescita. L’incidenza di tale patologia è di circa
6-8 casi ogni 1000 nati vivi e il tasso di sopravvivenza post operatorio è in crescita [18].
Figura 1.17 Rappresentazione del cuore affetto da tronco arterioso comune.
Atresia della tricuspide
Questa malformazione cardiaca è la terza patologia congenita più frequente ed è la causa più
comune di cianosi ed ipertrofia del ventricolo sinistro. È caratterizzata dalla totale assenza
della valvola tricuspide, e dalla presenza di uno shunt tra l’atrio destro e sinistro per
permettere la circolazione sanguigna (Figura 1.18). L’emodinamica è fortemente
influenzata, in quanto il sangue del circolo sistemico si mischia con il sangue del circolo
polmonare. Per metà dei neonati affetti da questa anomalia la diagnosi è immediata in quanto
i sintomi sono evidenti sin dalla nascita; in generale, almeno l’80% dei bambini affetti da
atresia della valvola tricuspide mostrano sintomi significativi entro il primo mese di vita. Le
condizioni di vita di questi pazienti possono essere migliorate se viene effettuato un
intervento palliativo come quello di Fontan [19].

26
Figura 1.18 Rappresentazione del cuore affetto da atresia della tricuspide.
Ventricolo sinistro a doppio ingresso
Questa malformazione cardiaca è la più comune forma di connessione atrioventricolare ad
un unico ventricolo ed è caratterizzata da un ventricolo destro ipoplasico o inesistente e da
un ventricolo sinistro dominante su cui si affacciano entrambe le valvole atrioventricolari
(Figura 1.19). Tipicamente questa patologia non influenza la vita fetale e può essere
identificata dopo la nascita per via dei bassi valori di saturazione dell’ossigeno nel sangue
(< 93%). Dal punto di vista chirurgico, per rimediare a questa malformazione si interviene
con tecniche palliative per ricostituire la circolazione sanguigna fisiologica [20].
Figura 1.19 Rappresentazione del cuore con ventricolo a doppio ingresso.

27
Ventricolo destro a doppia uscita
Fisiologicamente, durante lo sviluppo del feto e del cuore, il tratto arterioso si forma come
unica uscita dal ventricolo destro e successivamente si divide nelle due arterie principali
(aorta e arteria polmonare). Il rimodellamento successivo consiste nel riposizionamento del
vaso aortico il quale migra e si collega al ventricolo sinistro. Questa patologia congenita, è
causata dalla mancata separazione delle due arterie dal ventricolo destro, ed è sempre
associata ad un difetto inter ventricolare (Figura 1.20). È un’anomalia non comune che
riguarda 1-3% degli individui nati con patologie congenite [21].
Figura 1.20 Rappresentazione del ventricolo destro a doppia uscita.
Sindrome del prolasso valvolare mitralico
Questa anomalia cardiaca è caratterizzata dallo spostamento dei lembi della valvola mitrale
che, patologicamente inspessiti, si estendono verso l’interno dell’atrio sinistro durante la fase
di sistole. Può succedere che pazienti affetti dalla sindrome del prolasso valvolare mitralico
abbiano complicazioni importanti come il rigurgito della valvola stessa. In questi casi
l’intervento chirurgico è necessario. L’incidenza di tale malattia è contenuta, e riguarda il 2-
3% dei pazienti affetti da patologie cardiache congenite [22].
Sindrome della scimitarra
I pazienti affetti da sindrome della scimitarra, hanno un ritorno venoso dal polmone destro
anomalo che drena nella vena cava inferiore anziché nell’atrio sinistro. È una patologia
congenita rara, che in età infantile è caratterizzata da maggiore incidenza e severità dei difetti

28
associati (ipoplasia destra, difetto inter atriale, tetralogia di Fallot, coartazione dell’aorta)
[23]. La sua incidenza è di solo 2 casi ogni 100000 nati vivi.
Sindrome del cuore sinistro ipoplasico (HLHS)
Un tessuto o organo è ipoplasico quando si presenta come sottosviluppato o incompleto, e
questa condizione è dovuta ad una scarsa proliferazione cellulare. Tali malformazioni sono
di tipo congenito, quindi derivano dall’informazione genetica e si manifestano durante lo
sviluppo intrauterino del bambino.
Il cuore può presentare due principali condizioni legate all’ipoplasia dei suoi tessuti:
ipoplasia del cuore destro o del cuore sinistro. Quella destra, di incidenza minore, per questo
lavoro di tesi viene trascurata.
La sindrome del cuore sinistro ipoplasico può essere associata ad atresia aortica e in alcuni
casi anche mitralica. È una patologia molto rara che ha un’incidenza tra 1 e 2.5 casi ogni
10000 nati vivi, e ammonta a circa 1-3% delle malattie cardiache congenite [24], [25] [26],
[27]. La causa di tale malformazione è sconosciuta, ma è stato dimostrato come vi possa
essere un legame con il codice genetico del paziente. Robert B. Hinton et al., infatti, hanno
studiato l’ereditabilità di questa sindrome [28]. Preso un campione di 38 soggetti affetti da
HLHS, è stato analizzato il background clinico della parentela fino a tre generazioni
precedenti. Attraverso lo studio dei dati riguardanti 235 parenti dei pazienti esaminati, è stato
dimostrato che la probabilità di ereditare HLHS è di circa il 99%, mentre la probabilità di
ereditare questa patologia insieme ad altre malformazioni cardiovascolari è di circa il 74%
(p<0.00001).
I sintomi di questa malformazione si manifestano sin dalla nascita e il neonato deve essere
trattato immediatamente, altrimenti la sua condizione diventa insostenibile per la vita (95%
dei casi [29]). La sindrome del cuore sinistro ipoplasico è una delle lesioni cardiache
neonatali a rischio più elevato e, nonostante gli esiti degli interventi stiano migliorando, la
sopravvivenza al giorno d’oggi rimane di circa 65% dopo 5 anni di vita e 55% dopo 10 anni
di vita [29].
A causa della mancanza del ventricolo sinistro, il sangue di ritorno dalla vena polmonare
deve attraversare un difetto inter-atriale ed essere spinto dal ventricolo destro fuori dal cuore
(Figura 1.21). L’unico fattore che permettere la sopravvivenza neonatale è la pervietà del
dotto di Botallo. Il solo ventricolo destro si prende carico di entrambe le circolazioni, e grazie

29
alla pervietà di questo dotto il sangue è in grado arrivare sia ai polmoni che a tutti organi. È
quindi necessario che anche il forame ovale sia pervio, per permettere al sangue di ritorno
dal circolo polmonare di raggiungere il ventricolo destro.
Figura 1.21 Struttura del cuore affetto da HLHS.
Al momento della nascita il dotto di Botallo e il Forame ovale si chiudono spontaneamente
ed è dunque necessario intervenire chirurgicamente per garantire il completo circolo del
sangue. Ad oggi vi sono due tipi di trattamento possibili: trapianto di cuore o una serie di
interventi palliativi. La procedura palliativa, nota anche come procedura di Norwood, è
quella maggiormente utilizzata, ed è suddivisa in tre stadi chirurgici: (i) primo intervento nei
primi giorni di vita (Norwood); (ii) secondo intervento tra il quinto e il sesto mese di vita
(Glenn); (iii) terzo intervento tra il quarto e il quinto anno di vita (Fontan).
Di seguito vengono riportate le procedure relative ai tre interventi.
Norwood
L’obiettivo principale del primo intervento chirurgico è quello di assicurare una circolazione
sistemica senza ostruzioni e di fornire un passaggio al sangue proveniente dal circolo
polmonare. Si procede allargando l’aorta tramite un patch con l’obiettivo di correggere la
coartazione presente. Viene poi rimosso il setto atriale e l’arteria polmonare viene collegata
all’arco aortico. Questo collegamento viene effettuato tramite uno shunt in Gore-Tex,
tipicamente noto come shunt di Blalock-Taussing, che mette quindi in comunicazione
circolo sistemico e circolo polmonare (Figura 1.22).

30
Figura 1.22 Shunt tra arco aortico e arteria polmonare.
Esiste una tecnica alternativa a questo intervento che vede il collegamento diretto tra il
ventricolo destro e la circolazione polmonare tramite uno shunt, anche detto shunt di Sano
(Figura 1.23).
Figura 1.23 Shunt tra ventricolo destro e arteria polmonare.
Questo intervento è di tipo palliativo, in quanto non viene ripristinata la circolazione bi-
ventricolare. Le complicazioni che seguono questo intervento sono molte, e nonostante
l’accurata sorveglianza dei pazienti, tra il 4 e il 15% di essi muore mentre aspetta di essere
sottoposto al secondo intervento [29].
Glenn
Il secondo stadio della procedura viene effettuato nel momento in cui il neonato ha
raddoppiato il suo peso corporeo, e lo shunt originariamente inserito risulta insufficiente a
supportare la circolazione. Durante l’intervento viene rimosso lo shunt e la vena cava
superiore viene scollegata dal cuore e collegata all’arteria polmonare. L’effetto di tale
operazione è quello di convogliare il sangue venoso proveniente dai distretti superiori del

31
corpo nel circolo polmonare; questo collegamento viene chiamato shunt cavo-polmonare
(Figura 1.24). La vena cava inferiore, invece, viene lasciata in posizione fisiologica, quindi
parte del sangue non ossigenato è ancora in grado di entrare nel circolo sistemico e ciò causa
una leggera cianosi.
Figura 1.24 Anastomosi della vena cava superiore all'arteria polmonare.
Fontan
Lo stadio finale della procedura palliativa, consiste nel dirottare il ritorno venoso della vena
cava inferiore verso l’arteria polmonare. Si procede recidendo l’estremo della vena cava
inferiore e collegandolo ad un tubo in Gore-Tex, che viene a sua volta anastomizzato
all’arteria polmonare (Figura 1.25). In questo modo la totalità del sangue non ossigenato
viene mandata nel circolo polmonare e il ventricolo destro pompa nel circolo sistemico solo
sangue ossigenato. La circolazione risultante non è più formata da due circoli in parallelo,
ma da un singolo circolo composto dalla serie di quello sistemico e di quello polmonare. In
questo modo viene completato il bypass del ventricolo sinistro ma le due circolazioni sono
mantenute separate. In seguito a quest’ultimo stadio il paziente non sarà più cianotico, in
quanto il livello di saturazione di ossigeno nel sangue viene riportato all’interno del range
fisiologico.

32
Figura 1.25 Connessione cavo-polmonare totale.

33
2 Dispositivi di supporto meccanico alla circolazione cardiaca
In questo capitolo vengono descritti i dispositivi di assistenza meccanica alla circolazione.
Viene innanzitutto eseguita una classificazione di tali dispositivi in base alle loro
caratteristiche tra cui, la durata di utilizzo, i diversi organi che essi possono assistere e il loro
posizionamento.
Nella seconda parte del capitolo vengono illustrati i diversi modelli disponibili in commercio
con una particolare attenzione all’ambito infantile, oggetto della tesi: ci si sofferma sulle
specifiche che le tecnologie di supporto pediatriche devono soddisfare, sottolineando la
delicatezza e la complessità nel progettare ed impiantare un sostegno per bambini rispetto
all’assistenza dell’adulto.

34
Classificazione dei dispositivi di assistenza ventricolare
L’insufficienza cardiaca rappresenta una delle principali cause di morte nei paesi occidentali
[30]. L’inesistenza di una chirurgia convenzionale, o di una terapia atta a risolvere i problemi
dovuti a questa condizione, porta ad avere come unica soluzione il trapianto cardiaco.
Il trapianto cardiaco è tutt’oggi considerato il “gold standard” per pazienti soggetti a
scompenso cardiaco refrattario ma, nonostante le probabilità di successo dell’intervento
siano elevate, il continuo aumento del gap fra donatori e richiedenti rende questa operazione
non adatta alla cura di tutti i pazienti.
Il quadro riportato dal Ministero della Salute [31], infatti, mostra come il numero di
interventi realizzati negli ultimi dieci anni sia rimasto pressoché invariato, mentre, al
contrario, risulta evidente un sensibile aumento del numero di pazienti in lista d’attesa.
Attualmente il tempo medio d’attesa è superiore a due anni e ciò determina un rischio elevato
per i pazienti che, in questo periodo, possono soffrire di un deterioramento emodinamico
acuto spesso irreversibile.
Il trapianto cardiaco oggigiorno rappresenta la soluzione per un paziente su dieci, risultando
così una terapia poco efficace dal punto di vista epidemiologico.
L’assenza di una soluzione terapeutica efficace per gran parte dei pazienti con insufficienza
cardiaca grave ha portato, da oltre trent’anni, allo sviluppo della ricerca nel campo dei
sistemi di assistenza circolatoria meccanica.
Questi sistemi meccanici possono essere di due tipi: ossigenazione extracorporea a
membrana (Extra Corporeal membrane oxygenation, ECMO) oppure dispositivi di
assistenza cardiaca.
I sistemi ECMO vengono utilizzati per terapie a breve termine, spesso nei pazienti che oltre
ad insufficienza cardiaca presentano insufficienza polmonare e/o renale. I principali vantaggi
di questo sistema sono la flessibilità di utilizzo, la possibilità di incannulazione centrale o
periferica e la capacità di supportare più organi contemporaneamente (Figura 2.1).
Nonostante questi diversi aspetti positivi, i sistemi ECMO presentano anche due grossi
svantaggi.
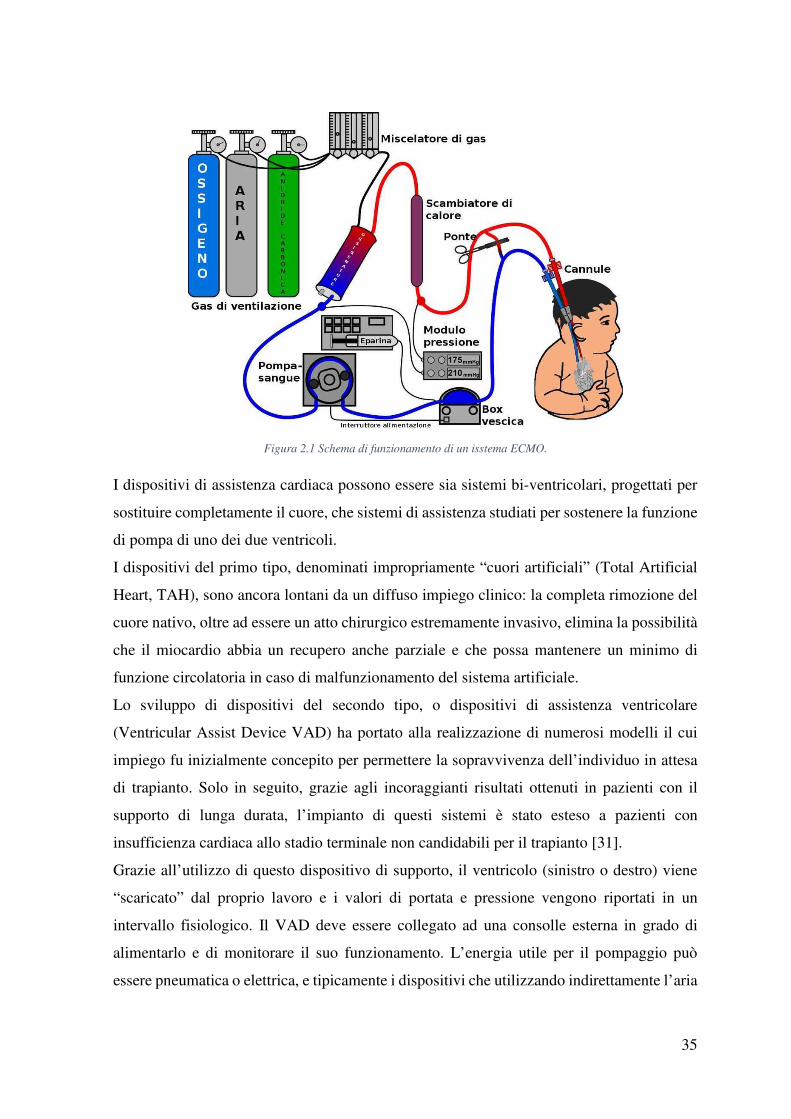
35
Figura 2.1 Schema di funzionamento di un isstema ECMO.
I dispositivi di assistenza cardiaca possono essere sia sistemi bi-ventricolari, progettati per
sostituire completamente il cuore, che sistemi di assistenza studiati per sostenere la funzione
di pompa di uno dei due ventricoli.
I dispositivi del primo tipo, denominati impropriamente “cuori artificiali” (Total Artificial
Heart, TAH), sono ancora lontani da un diffuso impiego clinico: la completa rimozione del
cuore nativo, oltre ad essere un atto chirurgico estremamente invasivo, elimina la possibilità
che il miocardio abbia un recupero anche parziale e che possa mantenere un minimo di
funzione circolatoria in caso di malfunzionamento del sistema artificiale.
Lo sviluppo di dispositivi del secondo tipo, o dispositivi di assistenza ventricolare
(Ventricular Assist Device VAD) ha portato alla realizzazione di numerosi modelli il cui
impiego fu inizialmente concepito per permettere la sopravvivenza dell’individuo in attesa
di trapianto. Solo in seguito, grazie agli incoraggianti risultati ottenuti in pazienti con il
supporto di lunga durata, l’impianto di questi sistemi è stato esteso a pazienti con
insufficienza cardiaca allo stadio terminale non candidabili per il trapianto [31].
Grazie all’utilizzo di questo dispositivo di supporto, il ventricolo (sinistro o destro) viene
“scaricato” dal proprio lavoro e i valori di portata e pressione vengono riportati in un
intervallo fisiologico. Il VAD deve essere collegato ad una consolle esterna in grado di
alimentarlo e di monitorare il suo funzionamento. L’energia utile per il pompaggio può
essere pneumatica o elettrica, e tipicamente i dispositivi che utilizzando indirettamente l’aria

36
per mettere in moto il sangue sono pulsatili, mentre se utilizzano corrente elettrica sono
assiali. Infine vi è un’unità di comando è composta da un sistema di controllo elettronico che
regola la modalità di pompaggio.
Le specifiche di progetto per un dispositivo di assistenza ventricolare sono:
• la biocompatibilità dei materiali;
• l’elevata resistenza a fatica della pompa;
• la capacità di regolare la portata ematica alle diverse esigenze fisiologiche
dell’organismo;
• l’assenza di emolisi all’interno del dispositivo;
• l’assenza di zone ad elevato sforzo di taglio (shear stress) o di ristagno all’interno del
dispositivo per evitare la formazione di trombi;
• le adeguate dimensioni anatomiche;
• la facilità di impianto;
• il basso costo;
• un’ottima affidabilità nel tempo.
Con l’obiettivo di attenersi il più possibile a queste specifiche sono stati realizzati numerosi
modelli di VAD, che possono essere classificati in base ad alcune loro caratteristiche,
elencate di seguito e spiegate successivamente.
- Tipo di flusso generato;
- Sede di impianto;
- Principio di propulsione;
- Durata del supporto al circolo.
La prima distinzione può essere fatta sulla base del tipo di flusso generato: ci possono essere
VAD a flusso pulsatile o a flusso continuo.
Quelli a flusso pulsatile, generalmente, sono composti da due camere, una per l'aria e l'altra
per il sangue, separate da una membrana elastica. La seconda ha un condotto di ingresso e
di uscita alle quali estremità vi sono due connettori per cannule. Nei condotti, due protesi
valvolari cardiache, polimeriche o meccaniche, permettono la pulsatilità e unidirezionalità
del sistema. Attraverso una cannula, che può essere suturata all’’atrio o direttamente
all’apice del ventricolo, si collega un tubo che viene collegato a sua volta con l’organismo;

37
il sangue viene poi restituito al corpo attraverso un tubo di collegamento e una cannula di
efflusso che viene anastomizzata ad una delle due grandi arterie (aorta, arteria polmonare).
La pressione all’interno della camera ventricolare è positiva in fase di sistole per permettere
al sangue di essere spinto all’interno del circolo, mentre risulta negativa in fase di diastole,
quando il sangue deve essere accolto nel VAD.
Il dispositivo è quindi dotato di un’unità pneumatica che regola il livello di pressione a
seconda della fase. È bene notare che sia in fase di sistole che in fase di diastole il
funzionamento della camera artificiale non dipende solo dalla pressione guida del
compressore ma anche dal valore delle resistenze nel circolo sistemico e/o polmonare.
I VAD a flusso continuo, invece, erogano una pressione di perfusione media senza
escursione sisto-diastolica.
Tutte le componenti dei VAD a flusso continuo si trovano allineate lungo un unico asse
longitudinale, attraverso il quale il sangue si muove con flusso laminare. Le dimensioni di
questi dispositivi sono estremamente ridotte in quanto essi non presentano la camera
ventricolare.
Una seconda classificazione dei dispositivi di assistenza ventricolare può essere fatta in base
alla loro sede di impianto: i VAD attualmente in commercio possono essere intracorporei,
paracorporei o extracorporei.
Nei dispositivi intracorporei le cannule e la pompa sono alloggiati all’interno dell’organismo
a livello intratoracico o addominale e sono collegati, attraverso un cavo percutaneo, al
sistema di controllo e alla fonte di energia posti all’esterno del corpo.
Per quanto riguarda i sistemi paracorporei la pompa, la fonte di energia e il sistema di
controllo sono collocati all’esterno del paziente e vengono collegati al cuore e alle grandi
arterie attraverso cannule percutanee. Tali dispositivi sono potenzialmente trasportabili dal
paziente.
Infine anche nei VAD extracorporei la pompa, la fonte di energia, il sistema di controllo ed
eventualmente quello di ossigenazione sono posti all’esterno del paziente ma, in questo caso,
essi sono collegati all’organismo tramite lunghe cannule percutanee che non permettono il
trasporto del dispositivo (esempio: ECMO).
Un’ulteriore distinzione può essere fatta in base al principio di propulsione: il flusso di
sangue può essere garantito attraverso l’uso di un sistema a spostamento di volume, di
turbine assiali o di pompe centrifughe.

38
I dispositivi il cui funzionamento è garantito dallo spostamento di volume trasferiscono
l’energia meccanica esercitando una forza sul sangue attraverso il movimento di una
membrana posta tra unità pneumatica e sangue. Questi dispositivi sono dotati di una camera
ventricolare che contiene il sangue e la membrana.
Le turbine assiali e micro-assiali invece, sono formate da una ventola in rotazione continua
lungo il proprio asse centrale che attraverso le sue lame rotanti attira il sangue e lo spinge in
modo da garantire minima emolisi.
Grazie alle loro dimensione ed al loro profilo tubolare questi dispositivi sono molto
maneggevoli e possono essere introdotti nell’albero vascolare periferico e fatte avanzare fino
alla valvola aortica, in modo da aspirare sangue dal ventricolo sinistro ed immetterlo in aorta
ascendente. Il principale inconveniente di tali sistemi è il rischio elevato di trombosi.
Infine, possono essere usate le pompe centrifughe che impartiscono al sangue un moto
tangenziale alla loro velocità di rotazione mediante la spinta esercitata sul liquido dalle pale
di un opportuno organo mobile che si muove ruotando attorno al proprio asse, solidale con
un rotore.
I principali inconvenienti di queste pompe sono i traumi subiti dagli elementi corpuscolati
del sangue (emolisi).
Un’ultima classificazione può essere fatta in base alla durata del supporto al circolo. I VAD
possono essere a breve termine, se usati da qualche ora a pochi giorni, a medio termine, se
usati dalle due alle quattro settimane o a lungo termine, se usati oltre le quattro settimane.
Vi sono poi VAD che vengono classificati come permanenti in quanto devono essere in
grado di fornire un’assistenza per un periodo potenzialmente indeterminato.
Dispositivi di assistenza ventricolare ad uso pediatrico
Il campo dei VAD ad uso pediatrico è in continua evoluzione, con un trend crescente per
quanto riguarda l’uso di dispositivi temporanei a flusso continuo.
Solo di recente, infatti, grazie alla loro progressiva miniaturizzazione, i VAD sono sempre
più utilizzati in campo pediatrico, a scapito dell’ossigenazione extracorporea a membrana.
Oltre al vantaggio dovuto alle dimensioni inferiori, è preferibile utilizzare VAD in quanto
essi permettono una migliore decompressione del ventricolo malato.
I VAD attualmente usati in ambito pediatrico per cure a breve termine sono: Bio-Medicus
BP-50 (Medtronic; Minneapolis, MN, Stati Uniti), CentriMag® (Levitronix LLC; Waltham,

39
MA, Regno Unito), Jostra RotaFlow Centrifugal Pump (MAQUET Cardiovascular; Wayne,
NJ, Stati Uniti) e TandemHeart (CardiacAssist, Inc.; Pittsburgh, PA, Stati Uniti) [32].
Il dispositivo della Medtronic mostrato in Figura 2.2 è formato da una pompa centrifuga con
dimensioni di inlet e outlet da ¼”, un volume di priming di 48 ml ed è in grado di fornire
una portata di 1.5 l/min [33].
Figura 2.2 Bio-Medicus™ BP-50.
La pompa CentriMag della Thoratec (Figura 2.3) è un dispositivo di supporto circolatorio,
certificato in Europa e adatto per essere utilizzato fino a 30 giorni. Può essere usato sia per
circolazione extracorporea che come dispositivo para-corporeo. Il vantaggio che offre è
dovuto alle eliche della pompa, che essendo a levitazione magnetica, riducono i danni legati
all’emolisi [34].

40
Figura 2.3 Thoratec CentriMag.
Una delle pompe centrifughe più piccole tra quelle disponibili è quella della Maquet, la
ROTAFLOW (Figura 2.4). È l’unica pompa centrifuga senza albero metallico e offre un
volume di priming di 32 ml. Riesce a fornire una portata massima di 10 l/min con connettori
da 3/8” [35].
Figura 2.4 Girante a cono ROTAFLOW.
L’ultimo tra i dispositivi a breve termine usato in ambito pediatrico è il TANDEMHEART
(Figura 2.5), che ha un volume di priming di soli 10 ml. La pompa aspira il sangue ossigenato
dall’atrio sinistro, e lo restituisce all’arteria femorale. In questo modo il dispositivo
sostituisce l’attività del ventricolo sinistro, fornendo portate fino a 5 litri/minuto [36].

41
Figura 2.5 Pompa centrifuga TandemHeart e opportuno posizionamento.
Per quanto riguarda i VAD per terapie a medio-lungo termine utilizzati in ambito pediatrico,
essi possono essere distinti tra para corporei e intracorporei. Quelli para-corporei più
comunemente utilizzati sono: il PVAD di Thoratec (Thoratec Laboratories Corp.;
Pleasanton, CA, Stati Uniti), BHE (Berlin Heart AG; Berlino, Germania) e MEDOS HIA
VADs (MEDOS Medizintechnik AG; Stolberg, Germania).
Il primo dispositivo, il PVAD di Thoratec (Figura 2.6) da oltre trent’anni in uso clinico,
viene considerato come dispositivo di riferimento per la sua affidabilità. Uno dei suoi grandi
vantaggi, nonostante le dimensioni non contenute, è che il paziente ha la possibilità di avere
grande mobilità e di lasciare l’ospedale durante il periodo di cura. Questo dispositivo è adatto
a pazienti con BSA ridotta, sino a 0.73 m2.
È stato anche mostrato che, nel 9% dei casi [37], esso permette al paziente di poter recuperare
la sua naturale funzione cardiaca.

42
Figura 2.6 Thoratec PVAD.
L’unico dispositivo di assistenza che, ad oggi, è stato riconosciuto dall’FDA per uso
pediatrico è il Berlin Heart EXCOR® (BHE) VAD [38]. Nel 1990 è stato il primo dispositivo,
utilizzato con successo, come ponte verso il trapianto [39]. Questo sistema para-corporeo
consiste in una pompa diaframmatica attuata da un compressore pneumatico, dotata di
valvole di poliuretano (Figura 2.7). È disponibile in diverse taglie e lo stroke volume
associato può essere di 10, 15, 25 e 30 ml. La versione da 15 ml è quella che ha ricevuto
l’approvazione dall’FDA nel 2012.
Figura 2.7 Berlin Heart EXCOR VAD.
Il dispositivo MEDOS VAD, di Medos è in uso dal 1994 (Figura 2.8). È possibile avere sia
la versione per il ventricolo destro che sinistro, ed è disponibile per adulti (72 / 80 ml e 54 /
60 ml), per bambini (22.5 / 25 ml) e per neonati (9 / 10 ml). È un dispositivo paracorporeo,
pulsatile con funzionamento simile a quello del Berlin Heart EXCOR VAD.
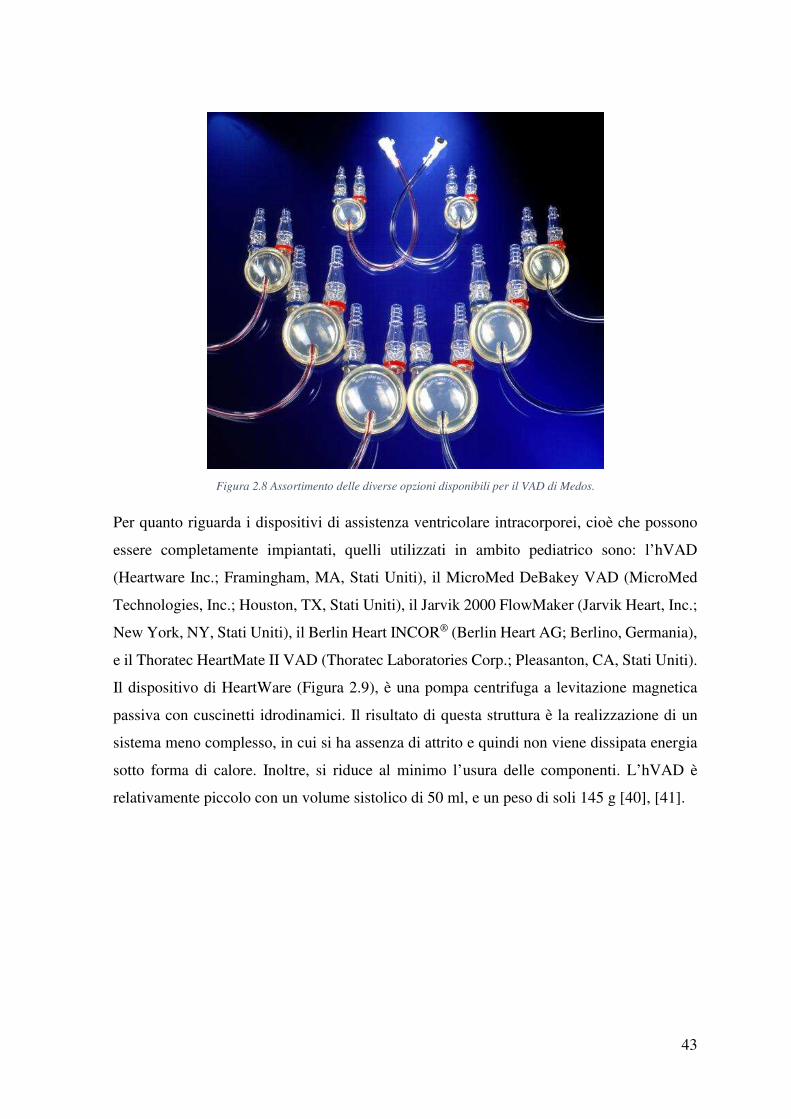
43
Figura 2.8 Assortimento delle diverse opzioni disponibili per il VAD di Medos.
Per quanto riguarda i dispositivi di assistenza ventricolare intracorporei, cioè che possono
essere completamente impiantati, quelli utilizzati in ambito pediatrico sono: l’hVAD
(Heartware Inc.; Framingham, MA, Stati Uniti), il MicroMed DeBakey VAD (MicroMed
Technologies, Inc.; Houston, TX, Stati Uniti), il Jarvik 2000 FlowMaker (Jarvik Heart, Inc.;
New York, NY, Stati Uniti), il Berlin Heart INCOR® (Berlin Heart AG; Berlino, Germania),
e il Thoratec HeartMate II VAD (Thoratec Laboratories Corp.; Pleasanton, CA, Stati Uniti).
Il dispositivo di HeartWare (Figura 2.9), è una pompa centrifuga a levitazione magnetica
passiva con cuscinetti idrodinamici. Il risultato di questa struttura è la realizzazione di un
sistema meno complesso, in cui si ha assenza di attrito e quindi non viene dissipata energia
sotto forma di calore. Inoltre, si riduce al minimo l’usura delle componenti. L’hVAD è
relativamente piccolo con un volume sistolico di 50 ml, e un peso di soli 145 g [40], [41].

44
Figura 2.9 Posizionamento del dispositivo hVAD di HeartWare.
Il MicroMed DeBakey è un VAD a flusso assiale, ideato in collaborazione con gli ingegneri
della NASA (Figura 2.10). È costruito in titanio e può fornire una portata fino a 10 l/min. Fu
impiantato per la prima volta nel 1998 e viene prodotto sia per pazienti adulti che pediatrici
[42].
Figura 2.10 Sezione del VAD di MicroMed.
Un altro esempio di VAD intracorporeo è quello ideato da Jarvik Heart: il Jarvik 2000
(Figura 2.11). Questo dispositivo, che può essere tenuto in una sola mano viste le dimensioni
estremamente ridotte, è in grado di fornire fino a 8.5 l/mi di portata. È fatto in titanio, ed è
ideato per supportare il cuore mentre esso recupera la sua normale attività. [43].

45
Figura 2.11 Vad Jarvik 2000.
Berlin Heart INCOR, di Berlin Heart (Figura 2.12), è un VAD intracorporeo che riesce a
fornire una portata fino a 8 l/min grazie alla presenza di una pompa centrifuga in titano a
levitazione magnetica. La parte a contatto con il sangue è costruita con materiali
appositamente studiati per minimizzare il rischio di trombosi. Questo dispositivo funziona
grazie ad algoritmi che assicurano il riempimento regolare del ventricolo sinistro, un flusso
sanguigno arterioso continuo e la regolare apertura della valvola aortica [44].
Figura 2.12 VAD intracorporeo Berlin Heart INCOR.
Infine Thoratec offre una soluzione intracorporea chiamata HeartMate III LVAD (Figura
2.13). Progettato per supportare il cuore del paziente malato per diversi anni, richiede un
intervento invasivo ma permette la mobilità del paziente [45].

46
Figura 2.13 HeartMate III di Thoratec.

47
3 Stato dell’arte dei simulatori del sistema circolatorio
Per poter progettare un banco prova è necessario disporre di modelli idraulici e matematici
che rappresentino il sistema cardiovascolare che si vuole simulare.
Ogni volta che si decide di creare un modello è bene fare delle scelte che riguardino in primis
l’accuratezza dello stesso: più sarà accurato nel riprodurre le diverse parti del sistema
considerato, maggiore sarà l’affidabilità e la realisticità dei risultati. Inoltre è necessario
considerare che, con l’aumentare dell’accuratezza aumenterà anche il costo computazionale
nel caso di modelli in silico, e la complessità di realizzazione dei componenti in caso di
modelli in vitro. Risulta quindi importante utilizzare delle approssimazioni che
semplifichino il problema e ne determinino il livello di discretizzazione. Si può, ad esempio,
decidere di non utilizzare tutte le informazioni anatomiche disponibili per i vari organi e di
limitarsi alla ricerca di modelli che forniscano pressioni e portate uguali a quelle del sistema
biologico studiato.
Tipicamente i simulatori della circolazione cardiovascolare vengono costruiti partendo da
un modello elettrico a parametri concentrati, per poi ottenere un equivalente idraulico dal
quale vengono ottenuti i dati necessari per la costruzione del banco prova fisico.
Nei paragrafi successivi verranno analizzati i modelli a parametri concentrati e in vitro
trovati in letteratura, usati per simulare il comportamento della circolazione corporea.
È bene notare come la maggior parte dei lavori rappresenti la circolazione adulta e non
pediatrica.

48
Stato dell’arte dei modelli a parametri concentrati
Un modello a parametri concentrati (lumped parameter model, LPM) rappresenta il sistema
circolatorio tramite una rete elettrica, dove ogni componente di tale rete viene associata alla
sua equivalente idraulica. Seguendo questo approccio, la tensione e la corrente equivalgono
rispettivamente alla pressione e alla portata, i condensatori simulano le proprietà elastiche
dei vasi, mentre, resistenze ed induttori rappresentano le dissipazioni energetiche dovute agli
attriti e ai fenomeni di inerzia del fluido. La portata sanguigna viene descritta tramite le
equazioni di conservazione della massa, la legge di Poiseuille nel caso di stazionarietà e le
equazioni di Navier-Stokes altrimenti.
Il primo modello a parametri concentrati nacque nel 1899, quando lo studioso Otto Frank
propose di rappresentare la circolazione sistemica in maniera semplificata, utilizzando il
cosiddetto modello Windkessel, termine tedesco che significa serbatoio d'aria [46]. Secondo
questa proposta l'albero arterioso sistemico funziona come un serbatoio elastico, che,
attraverso la valvola aortica, riceve sangue in modo pulsatile dal ventricolo sinistro e lo cede
alle arteriole e ai capillari che possono essere rappresentati complessivamente come una
resistenza vascolare equivalente. A valle dei capillari si ha la circolazione venosa sistemica,
che in questo modello viene considerata a pressione atmosferica (Figura 3.1).
Figura 3.1 Modello Windkessel.
In termini di analogia elettrica, si può verificare come il modello Windkessel corrisponda al
parallelo di un condensatore (C) e di una resistenza (R) (Figura 3.2).

49
Figura 3.2 Equivalente elettrico modello Windkessel.
Questo modello fu il primo tentativo di descrivere il comportamento dinamico della
circolazione sistemica in regime pulsatile. Esso è caratterizzato da varie semplificazioni ed
approssimazioni che ne limitano la validità e che devono essere tenute ben presenti,
soprattutto quando viene usato per valutazioni quantitative. Infatti, tale modello, chiamato
modello Windkessel a due elementi, è capace di imitare il comportamento dell’albero
arterioso a basse frequenze ma non riesce a rappresentare correttamente le grandezze ad esso
riferite su una gamma di frequenze più ampia; inoltre, non tiene conto della dinamica della
circolazione venosa.
Per ovviare a queste limitazioni sono stati proposti modelli più complessi.
Al fine di considerare anche la circolazione venosa, pur sempre in modo semplificato, si può
collegare al modello Windkessel a due elementi un altro serbatoio elastico caratterizzato da
un volume e da una compliance �, collegato a sua volta all’atrio destro attraverso una
strozzatura che oppone una resistenza �. In Figura 3.3 è rappresentato uno schema di tale modello mentre in Figura 3.4 il suo equivalente elettrico, chiamato anche modello di Guyton dal nome del suo ideatore [47].
Figura 3.3 Modello di Guyton.

50
Figura 3.4 Equivalente elettrico del modello di Guyton.
La compliance venosa � è di un ordine di grandezza superiore a quello della compliance
arteriosa C. Questo è dovuto alla maggiore deformabilità delle pareti venose rispetto a quelle
arteriose e soprattutto al fatto che il volume di sangue totale contenuto nelle vene è circa il
quadruplo di quello contenuto nelle arterie.
Nel modello Windkessel sono poi stati aggiunti ulteriori elementi per migliorare il
comportamento ad alte frequenze.
Nel 1971 Westerhof et al. [48] hanno mostrato che, ponendo in serie al modello RC un
secondo elemento resistivo Zc, inserito per rappresentare le proprietà aortiche, la risposta in
frequenza del modello migliora significativamente. Questo accade specialmente nei range di
media-alta frequenza, perciò, questo modello, che viene indicato come Windkessel a tre
elementi, è capace di generare profili di onde pressorie che si avvicinano molto a quelle
misurate nell’albero arterioso.
L’analogo elettrico per questa nuova configurazione è mostrato in Figura 3.5.
Figura 3.5 Equivalente elettrico del modello Windkessel a tre elementi.
Infine, è stato dimostrato come l’aggiunta di un quarto elemento, cioè un componente
rappresentante l’inerzia del sangue (L), produca un miglioramento rispetto al modello a tre
elementi (Figura 3.6).

51
Figura 3.6 Equivalente elettrico del modello Windkessel a 4 elementi.
Per quanto riguarda lo studio della circolazione pediatrica, soprattutto di quella associata ai
tre interventi palliativi di Norwood-Glenn-Fontan nelle patologie a ventricolo unico, in
letteratura sono presenti differenti modelli a parametri concentrati in cui i vari distretti del
corpo vengono rappresentati più o meno dettagliatamente.
Si può notare come gli studi che riportano modelli a parametri concentrati più dettagliati
siano quelli a cui segue un’analisi fluidodinamica computazionale (CFD), mentre quelli
associati alla costruzione di banchi prova risultino meno complessi al fine di garantire
maggior facilità di costruzione.
Nello studio svolto da Baretta nel 2010 [1], che ha l’obiettivo di confrontare diverse tipologie
di connessioni cavo polmonari totali (TCPC) seguendo le fasi di una pianificazione
chirurgica virtuale, è stato implementato il modello a parametri concentrati riportato in
Figura 3.7.

52
Figura 3.7 Schema a blocchi del modello a parametri concentrati del circuito di Baretta (destra) ed equivalente elettrico
(sinistra) nella configurazione seguente l’intervento di Glenn [1].
Lo schema a blocchi proposto è formato da quattro macro-sezioni che rappresentano
rispettivamente il cuore, la parte superiore del corpo (“upper body”, UB), la parte inferiore
(“lower body”, LB) e la circolazione polmonare. Per quanto riguarda il cuore esso è stato
descritto tramite due compliance variabili rappresentanti un unico atrio e un unico ventricolo.
Il tratto della rete che schematizza la circolazione polmonare è stato diviso in due parti che
a loro volta rappresentano la circolazione nel polmone destro e sinistro. Ogni ramo viene
suddiviso tra tratto venoso e tratto arterioso. Questa suddivisione si ritrova anche nei blocchi
rappresentanti la parte superiore e inferiore del corpo. L’aorta viene rappresentata con tre
blocchi che a loro volta corrispondono all’arco aortico, all’aorta toracica e a quella
addominale. Nella parte dei distretti inferiori sono inoltre presenti rami specifici che
identificano i diversi organi quali reni, fegato, intestino e gambe. Anche la vena cava viene
divisa in toracica e addominale per avvicinarsi maggiormente ai tracciati clinici.
Nel modello sviluppato è stato inserito l’effetto della respirazione, che agisce sui vasi e sugli
organi interni, in termini di pressione intra-addominale e intra-toracica. È stato inoltre
considerato il collasso delle vene cave, che avviene quando la pressione transmurale diventa
negativa a causa di un’elevata pressione esterna.

53
A livello delle vene degli arti inferiori è stato inserito un elemento che modella una valvola
venosa. È stata invece esclusa dal modello la circolazione coronarica e non sono stati
indagati gli effetti che la gravità ha sulla circolazione sanguigna.
Una volta creata la rete, è stato necessario definire i parametri di ciascun distretto in modo
da generare valori medi e forme d’onda pressorie e di portate il più possibile vicini ai tracciati
clinici. Al fine di creare un modello paziente-specifico, è stato necessario scegliere i valori
clinici a cui fare riferimento per la definizione dei parametri elettrici. Il modello di Baretta
appare il più dettagliato rispetto alla letteratura esaminata e viene utilizzato in diversi studi
successivi.
Un altro modello a parametri concentrati molto dettagliato ritrovato in letteratura è quello
proposto da Molfetta et al. nel 2012 [49]. L’obiettivo di tale studio era la realizzazione e la
validazione di un modello a parametri concentrati, capace di simulare l’emodinamica di un
paziente con un unico ventricolo e permettere l’analisi degli effetti dovuti all’ impianto di
VAD.
Sono state costruite tre reti che rappresentano rispettivamente la circolazione di Norwood,
Glenn e Fontan. In Figura 3.8 viene riportata la rete riferita alla circolazione di Glenn.
Lo schema a parametri concentrati è composto da due macro-sezioni, una polmonare e una
sistemica, schematizzate con modelli Windkessel. Le valvole sono rappresentate da diodi,
mentre l’atrio e il ventricolo unico vengono simulati con un modello ad elastanza variabile.
Infine il difetto interatriale è schematizzato con una resistenza. Il circuito è stato
implementato in LAbView 7.1.

54
Figura 3.8 Analogo elettrico della circolazione di Glenn per Molfetta.
I valori dei parametri di riferimento sono stati ottenuti dai dati clinici di 30 pazienti (10
Norwood, 10 Glenn, 10 Fontan).
Le resistenze polmonari e sistemiche sono state calcolate partendo da questi dati. I polmoni
sono stati schematizzati separatamente, ipotizzando una resistenza uguale per ciascuno di
essi. Le resistenze sistemiche sono state assunte in parallelo e risultano uguali per quanto
riguarda la circolazione di Norwood e Glenn, mentre nel caso di Fontan, la resistenza dei
distretti inferiori è stata impostata doppia rispetto a quella riferita ai distretti superiori. A
partire dalle forme d’onda pressorie arteriose sistemiche è stato possibile calcolare la
costante di tempo, da cui ne deriva il calcolo della compliance sistemica. La compliance è
stata poi corretta empiricamente come il valore necessario per raggiungere la corretta
pressione arteriosa polmonare sistolica.
Esaminando, invece, modelli a parametri concentrati meno dettagliati si può considerare in
primis la rete presentata da Vukicevic et al. [50] riportata in Figura 3.9.

55
Figura 3.9 Analogo elettrico circolazione di Fontan per Vukicevic.
Questo schema rappresenta la circolazione di Fontan e unisce un modello a parametri
concentrati (0D) con una sezione 3D patient-specific rappresentante la TCPC. La parte 3D
corrisponde all’anatomia del paziente e viene ricostruita a partire da immagini di risonanza
magnetica. Questo schema può essere suddiviso in quattro macro-blocchi: distretto inferiore,
circolazione viscerale, distretto superiore e circolazione polmonare. Ogni blocco è costituito
da quattro elementi che includono una resistenza prossimale ed una distale, una compliance
e un’inertanza. I valori attribuiti ai diversi parametri sono ottenuti utilizzando come
riferimento il modello LPN di Baretta et al. [1].
Il modello a parametri concentrati più recente riscontrato in letteratura è quello proposto da
Parabiaghi e Vicario [51], usato per simulare la circolazione di Glenn, Fontan e quella
fisiologica. In Figura 3.10 è rappresentato il modello riferito alla circolazione di Glenn. I
valori dei parametri della rete sono stati ottenuti riducendo il modello proposto da Baretta et
al. [1].

56
Figura 3.10 Analogo elettrico della circolazione di Glenn per Parabiaghi e Vicario.
Il modello presenta quattro blocchi principali usati per schematizzare quattro specifici
distretti: aortico, inferiore, superiore e polmonare. Le caratteristiche dell’aorta vengono
rappresentate con un modello Windkessel a 3 elementi. I distretti inferiori sono rappresentati
da un modello Windkessel a 4 elementi in cui sono presenti due elementi resistivi. La prima
resistenza simula i diversi organi, la seconda, invece, corrisponde alla vena cava inferiore. I
polmoni vengono condensati in un unico blocco Windkessel a 4 elementi dove la resistenza
totale è divisa in resistenza polmonare e resistenza della vena polmonare. Infine il distretto
superiore viene raffigurato con un modello Windkessel a 3 elementi condensando le
caratteristiche resistive totali in un’unica resistenza.
All’interno del circuito è stato introdotto un blocco che rappresenta il VAD, che viene
alimentato dalla forma d’onda cardiaca proposta da Swanson & Clark [52]. In particolare, la
forma d’onda rappresenta la portata aortica durante le fasi di sistole e diastole ventricolare,
risultando fedele a quella reale.
Il circuito, che è stato implementato in Simulink® (Matlab, Mathworks, ver. 8.5), permette
di effettuare rilevazioni di pressione e portata in diversi punti, utili a verificare la coerenza
dei dati rilevati con i dati clinici ottenuti tramite cateterizzazione.

57
Stato dell’arte dei banchi prova
Il banco prova è uno strumento essenziale per valutare in vitro la funzionalità dei dispositivi
di assistenza ventricolare. Esso non può sostituire le prove in vivo, ma, se progettato
accuratamente, può dare precisi riferimenti sugli effetti che tale dispositivo ha
sull’emodinamica della circolazione.
Principalmente i banchi prova possono essere divisi in due tipologie: quelli usati per valutare
gli effetti della sola attività cardiaca e quelli utilizzati per monitorare l’influenza che altri
organi possono avere su di essa.
In entrambi i casi il circuito idraulico realizzato deve permettere la variabilità controllata
delle sue caratteristiche, come la modifica dei valori di resistenza o compliance per simulare
in alternanza stati patologici e fisiologici.
In letteratura sono stati trovati diversi banchi prova; di seguito vengono riportati quelli
progettati per testare dispositivi di assistenza ventricolare.
Nel 2005, Timms et al [53] hanno proposto come soluzione tecnica per caratterizzare
ventricoli artificiali un circuito idraulico formato da quattro elementi complianti, due atri,
due elementi resistivi ed una pompa (Figura 3.11).
Figura 3.11 Rappresentazione schematica del banco prova di Timms et al.
Con l’uso di due reservoir a pelo libero vengono simulati i due atri, aventi sono
comportamento passivo. Le due camere ventricolari, invece, sono attuate pneumaticamente
da compressori. La contrazione ventricolare è monitorata tramite una scheda di controllo e
il software ad essa abbinato, mentre la lettura delle pressioni vascolari viene effettuato

58
tramite trasduttori di pressione. Gli scenari analizzati sono inizialmente quello fisiologico e
successivamente quello di insufficienza cardiaca indotta.
Nel 2010, Figliola et al. [54] hanno proposto diversi banchi prova: uno utile a simulare la
circolazione polmonare, uno per simulare l’effetto della coartazione aortica e uno per
simulare la circolazione corporea di Fontan. I diversi circuiti vengono costruiti a partire dai
corrispettivi modelli a parametri concentrati.
Il modello della circolazione destra (Figura 3.12) viene divisa in tre compartimenti che
simulano rispettivamente il ventricolo destro, l’arteria polmonare e la circolazione vascolare.
Il flusso pulsatile viene garantito utilizzando una camera ventricolare, separata in due parti
da un diaframma elastico che viene attuato pneumaticamente. Il liquido in ingresso al
ventricolo viene fornito dalla camera atriale, che a sua volta attinge dal recipiente atriale, il
quale garantisce una pressione costante nella camera ventricolare. Le compliance sono state
realizzate con casse alte 750 mm e con diametro 100 mm, e possono essere classificate come
compliance a cassa d’aria chiusa.
Figura 3.12 Modello a parametri concentrati usato per il modello della circolazione destra o polmonare.
Per studiare la coartazione aortica, alla quale spesso vanno incontro i pazienti, in seguito
all’operazione di Norwood, viene proposto un ulteriore banco prova (Figura 3.13).
Quest’ultimo è composto da una pompa centrifuga, una camera prossimale alla coartazione
nella quale viene misurata la portata tramite l’uso di flussimetro Doppler, una sezione
stenotica che rappresenta la coartazione e due trasduttori di pressione posizionati a valle e a
monte del luogo di coartazione. Viene inoltre inserita una sezione resistenza per simulare il
post-carico atriale sistemico.

59
Figura 3.13 Schematico per testare l'accuratezza di predizioni Doppler in caso di coartazione dell'aorta.
Diversamente da quanto trattato finora, Huang et al. [55] svilupparono un banco prova per
VAD sinistri pediatrici come mostrato in Figura 3.14.
Figura 3.14 Set up del simulatore della circolazione sistemica.
Il circuito consiste in un simulatore del ventricolo sinistro, una camera di compliance aortica,
un elemento resistivo e un reservoir che rappresenta le vene e l’atrio sinistro (Figura 3.15).
Questo lavoro mira a simulare la funzione complessiva del sistema cardiovascolare, e non
ad imitare le diverse strutture anatomiche.
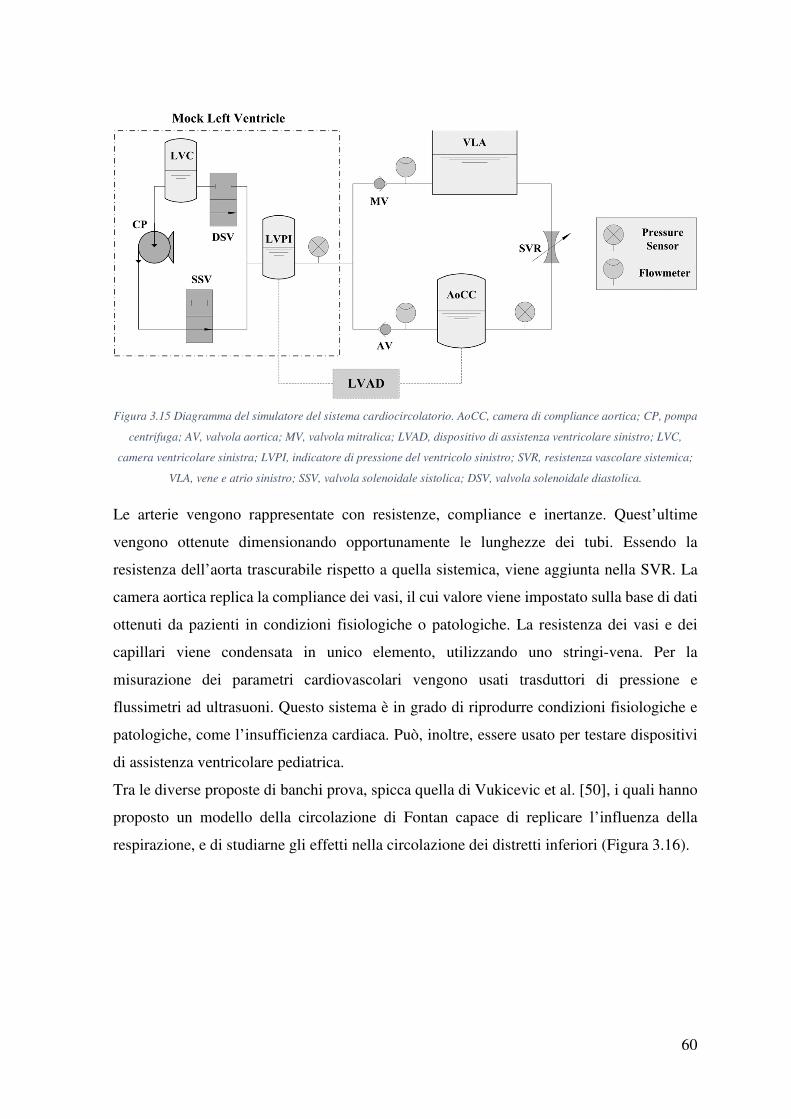
60
Figura 3.15 Diagramma del simulatore del sistema cardiocircolatorio. AoCC, camera di compliance aortica; CP, pompa
centrifuga; AV, valvola aortica; MV, valvola mitralica; LVAD, dispositivo di assistenza ventricolare sinistro; LVC,
camera ventricolare sinistra; LVPI, indicatore di pressione del ventricolo sinistro; SVR, resistenza vascolare sistemica;
VLA, vene e atrio sinistro; SSV, valvola solenoidale sistolica; DSV, valvola solenoidale diastolica.
Le arterie vengono rappresentate con resistenze, compliance e inertanze. Quest’ultime
vengono ottenute dimensionando opportunamente le lunghezze dei tubi. Essendo la
resistenza dell’aorta trascurabile rispetto a quella sistemica, viene aggiunta nella SVR. La
camera aortica replica la compliance dei vasi, il cui valore viene impostato sulla base di dati
ottenuti da pazienti in condizioni fisiologiche o patologiche. La resistenza dei vasi e dei
capillari viene condensata in unico elemento, utilizzando uno stringi-vena. Per la
misurazione dei parametri cardiovascolari vengono usati trasduttori di pressione e
flussimetri ad ultrasuoni. Questo sistema è in grado di riprodurre condizioni fisiologiche e
patologiche, come l’insufficienza cardiaca. Può, inoltre, essere usato per testare dispositivi
di assistenza ventricolare pediatrica.
Tra le diverse proposte di banchi prova, spicca quella di Vukicevic et al. [50], i quali hanno
proposto un modello della circolazione di Fontan capace di replicare l’influenza della
respirazione, e di studiarne gli effetti nella circolazione dei distretti inferiori (Figura 3.16).

61
Figura 3.16 Fotografia del banco prova con dettaglio della connessione cavo polmonare (1); Compliance specifica della
IVC (2); Compliance polmonare (3); Resistenza polmonare (4); Compliance dei distretti inferiori (5) e superiori (10);
Stringi-vena (6), (7), (9); Compliance del distretto splancnico (8); Trasduttori di pressione (11); IVC, vena cava
inferiore; LPA, arteria polmonare sinistra; RPA, arteria polmonare destra; SVC, vena cava superiore.
Il banco prova viene realizzato e testato per due pazienti di età diverse (pediatrico con BSA
di 0.67 e 1.2 m2). Gli elementi resistivi vengono realizzati con valvole a sfera ed elementi di
flusso che consistono in un fascio di capillari con diametro variabile tra 0.75 e 3 mm. La
compliance del distretto superiore viene realizzare con una camera chiusa, mentre quella del
distretto viscerale viene realizzata inserendo una membrana in latex tra aria e acqua. Per
simulare la compliance del distretto polmonare, invece, si fa uso di camere di Starling con
tubo comprimibile.
Infine nel 2014 Parabiaghi e Vicario [51], nel loro lavoro di tesi hanno ideato un banco prova
che, in base a come viene strutturato, può simulare la circolazione corporea infantile in
condizioni fisiologiche, successive all’intervento di Glenn o di Fontan (Figura 3.17, Figura
3.18(A), Figura 3.18 (B)).

62
Figura 3.17 Fotografia del banco prova in condizioni fisiologiche. 1, VAD; 2, compliance aortica; 3, resistenza distretti
inferiori; 4, compliance distretti inferiori; 5, resistenza distretti superiori; 6, compliance distretti superiori; 7, atrio
destro; 8, VAD destro; 9, resistenza polmonare; 10, compliance polmonare; 11, atrio sinistro.
Figura 3.18 Fotografie del banco prova in condizioni di Glenn (A) e Fontan (B). 1, VAD; 2, compliance aortica; 3,
resistenza distretti inferiori; 4, compliance distretti inferiori; 5, resistenza distretti superiori; 6, compliance distretti
superiori; 7, resistenza polmonare; 8, compliance polmonare; 9, atrio.
Per la riproduzione della resistenza polmonare hanno scelto di avvolgere una rete di plastica
semirigida per formare un cilindro cavo poroso, al cui interno è permesso lo scorrimento di
una barra capace di variare la quantità di poroso che oppone resistenza al flusso. Per la
realizzazione delle resistenze sistemiche è stato utilizzato lo stesso meccanismo, ma al posto
della rete è stato realizzato un cilindro poroso cavo ottenuto ad hoc mischiando resina bi-
A B

63
componente e sabbia. Le compliance sono state rappresentate con casse d’aria chiuse, mentre
le inertanze dimensionando opportunamente le lunghezze dei tubi.
Il lavoro più recente trovato in letteratura è infine quello di Pugovkin, A. A. et al. [56], i
quali costruiscono un banco prova per testare VAD. Il banco prova consiste in due VAD
pulsatili, quattro camere chiuse formate da reservoir, un flussimetro, otto trasduttori di
pressione, un sistema di controllo pneumatico e due elementi resistivi (Figura 3.19). Il
sistema di controllo permette la misurazione della pressione, la scelta della modalità
(aspirazione o compressione) e il controllo di intensità. I dati che vengono ottenuti sono letti
da una scheda di acquisizione che è connessa ad un PC tramite il quale si esegue la
rielaborazione.
Figura 3.19 Fotografia del banco prova circolatorio.

64
4 Progettazione del banco prova attraverso un modello a
parametri concentrati
Nel seguente capitolo è presentato il modello a parametri concentrati utilizzato per progettare
il banco prova, oggetto di questo lavoro di tesi. Viene adottato uno schema elettrico e, nei
primi paragrafi, viene spiegato come sono stati scelti i valori degli elementi presenti in ogni
distretto. Essi infatti, derivano da altri modelli e sono opportunamente adattati, tramite l’uso
di equazioni allometriche, al circuito che si vuole riprodurre.
Una volta ottenuti i valori di tutti gli elementi elettrici, vengono effettuate delle simulazioni
in Simulink necessarie ad ottenere l’andamento di pressione e portata all’uscita di ogni
distretto.
Una volta verificata la correttezza dei tracciati di portata e pressione, i valori dei parametri
concentrati ottenuti sono stati utilizzati per la costruzione del banco prova.
Infine, dopo aver costruito il banco prova, questo è stato caratterizzato al fine di verificare
l’omogeneità tra i dati misurati sperimentalmente e quelli di progetto confrontando
l’andamento di portate e pressioni.

65
Scelta del modello
Come accennato nel capitolo precedente, l’utilizzo di un modello a parametri concentrati
può essere di grande utilità per la realizzazione di un banco prova.
Una volta definiti tutti i componenti della rete, è infatti possibile simulare il comportamento
del circuito, analizzare l’andamento di pressioni e portate nei punti di interesse e verificare
che il modello simuli realmente la circolazione che si vuole riprodurre.
In questo studio il modello predittivo elettrico è stato costruito sulla base della rete realizzata
da Parabiaghi e Vicario per simulare la circolazione di Glenn.
Tale modello può essere diviso in cinque blocchi, che rappresentano il cuore, l’aorta, i
distretti superiori, i distretti inferiori e il distretto polmonare come mostrato in Figura 4.1
Figura 4.1 Rappresentazione schematica del circuito.
Ognuno di questi blocchi è stato riprodotto elettricamente come mostrato in Figura 4.2.

66
Figura 4.2 Modello a parametri concentrati utilizzato per rappresentare la circolazione di Glenn.
I distretti inferiori e il distretto polmonare sono stati schematizzaati con un modello
Windkessel a quattro elementi, mentre per i distretti superiori si è utilizzato un modello
Windkessel a tre elementi. Per quanto riguarda il cuore, esso viene rappresentato da un
generatore di tensione, che svolge le funzioni dell’unico atrio, e da un generatore ideale di
corrente, che simula il comportamento del ventricolo.
L’andamento della corrente in uscita dal generatore corrisponde alla curva proposta da
Swanson e Clark, mostrata in Figura 4.3, utilizzata per rappresentare la portata aortica.
Per implementare il circuito è stata usata la libreria Electrical della Foundation Library di
Simscape appartenente a Simulink, presente in ambiente MATLAB, che permette la
simulazione di circuiti elettrici.

67
Figura 4.3 Curva proposta da Swanson e Clark per rappresentare l'andamento nel tempo della portata aortica.
Il codice che restituisce la curva raffigurata, implementato precedentemente da Parabiaghi e
Vicario, richiede, per il suo funzionamento, l’inserimento della portata e della frequenza
cardiaca. In questo studio è stata impostata una portata media di 1,2 l/min poiché è stato
scelto di simulare il cuore tramite l’uso di un VAD del volume di 10 ml capace di svuotarsi
completamente ad una frequenza cardiaca di 100 bpm.
Questo dispositivo viene rappresentato da un generatore ideale di corrente in grado di
erogare sempre la stessa corrente indipendentemente dal valore della tensione ai suoi capi e,
per questo motivo, può essere facilmente assimilato ad una pompa volumetrica.
Inoltre, poiché l’atrio è soggetto a variazioni di pressione di piccola entità durante le fasi di
sistole e diastole è stata considerata una pressione media costante durante tutta la durata della
simulazione.
Calcolo BSA
L’obiettivo dello studio in esame è simulare, attraverso tre circuiti distinti, il sistema
circolatorio di pazienti di 2, 4 e 5 anni sottoposti all’intervento di Glenn.
È stato necessario innanzitutto definire la superficie corporea (BSA) corrispondente a queste
età; i valori dei parametri del circuito infatti variano al variare di questa grandezza.
Per il calcolo è stato utilizzato l’abaco riportato in Figura 4.4 tramite cui è possibile associare
ad ogni diversa età del paziente il peso e l’altezza media corrispondente.

68
Figura 4.4 Abaco usato per ricavare l'altezza e il peso corporeo dei pazienti avendo a disposizione la loro età.
I dati ottenuti sono riportati in Tabella 4.1 e sono stati correlati tra loro attraverso la formula
di Mosteller (6) per ottenere i valori di BSA ad essi associati.
;�� = <��=> ∗ �?@�AAB3600 6.
Tabella 4.1 Valori BSA ottenuti dal normogramma.
Età [anni] Peso [Kg] Altezza [cm] BSA [m2]
2 13 86,5 0,56
4 16 102 0,67
5 18 109 0,74
Calcolo dei parametri del circuito
Una volta ottenute le BSA ricercate è stato necessario dimensionare gli elementi presenti
nella rete elettrica.
I modelli a parametri concentrati, utilizzati per rappresentare la circolazione corporea,
possono essere adattati allo studio del sistema circolatorio in età differenti variando i valori

69
degli elementi del circuito attraverso l’utilizzo di equazioni allometriche. A parità di circuito,
esse infatti permettono di trovare i valori dei parametri per una BSA scelta, partendo da
quelli correlati ad una BSA di riferimento.
Le equazioni allometriche sono espresse tramite la formula:
F = FG ∙ H ;��;��GIJ 7.
dove
• x è il parametro da trovare;
• BSA è la superficie corporea a cui si deve riferire il circuito [m2];
• x0 è il valore del parametro nel circuito associato alla BSA di riferimento;
• BSA0 è la superficie corporea di riferimento [m2];
• b è una costante chiamata “fattore di scala” che dipende dalle caratteristiche del
circuito e dalla BSA di riferimento
Per poter dimensionare gli elementi della rete raffigurata in Figura 4.2 per le BSA pari a
0.56, 0.67 e 0.74 m2 sono stati eseguiti i passaggi spiegati di seguito.
Per prima cosa è stato considerato il lavoro svolto da Baretta et al [1] che, benché presenti
un modello a parametri concentrati molto più complesso di quello utilizzato in questo studio,
fornisce dati utili per l’utilizzo delle equazioni allometriche. Nel testo infatti, viene riportata
la rete mostrata in Figura 4.5 e i valori di tutti i parametri associati ad una BSA di 0.66 m2.
È inoltre specificato come questi valori vengano ottenuti attraverso l’uso di equazioni
allometriche utilizzando una BSA di riferimento pari a 1.8 m2 e i fattori di scala riportati in
Figura 4.5. È bene notare come questi fattori di scala assumano un valore differente a
seconda del distretto considerato.

70
Figura 4.5 Modello a parametri concentrati usato da Baretta et al [1] (sinistra) e i fattori di scala utilizzati nelleequazioni
allometriche (destra).
Utilizzando i dati a disposizione e la formula inversa delle equazioni allometriche riportata
di seguito, è stato possibile calcolare i valori di tutti i parametri per la rete associata alla BSA
di riferimento.
FG = F ∙ H ;��;��GIKJ 8.
Una volta ottenuti tutti i valori di interesse associati alla rete di riferimento, utilizzando
nuovamente le equazioni allometriche è stato possibile calcolare il valore di tutti i parametri
elettrici per le reti analoghe associate alle BSA di interesse (0.56 m2, 0.67 m2 e 0.74 m2).
A questo punto è stato necessario ridurre i circuiti ottenuti al un numero di parametri
desiderato.
In elettrotecnica per ridurre un circuito complesso viene utilizzato il teorema di Thevenin,
che stabilisce che per qualunque circuito lineare esiste un equivalente formato da un
generatore reale di tensione in serie ad un resistore. Utilizzando questo teorema si è
inizialmente provato a ridurre il circuito ma, data la sua complessità e il numero di parametri
a cui si voleva arrivare (3 o 4 a seconda del distretto), questo metodo è stato scartato.
Si è deciso dunque di usare un metodo semplificativo che consiste nel ridurre i vari distretti
del circuito in un numero variabile di parametri, considerando singolarmente un solo
elemento elettrico (resistenza, compliance o inertanza) per volta.
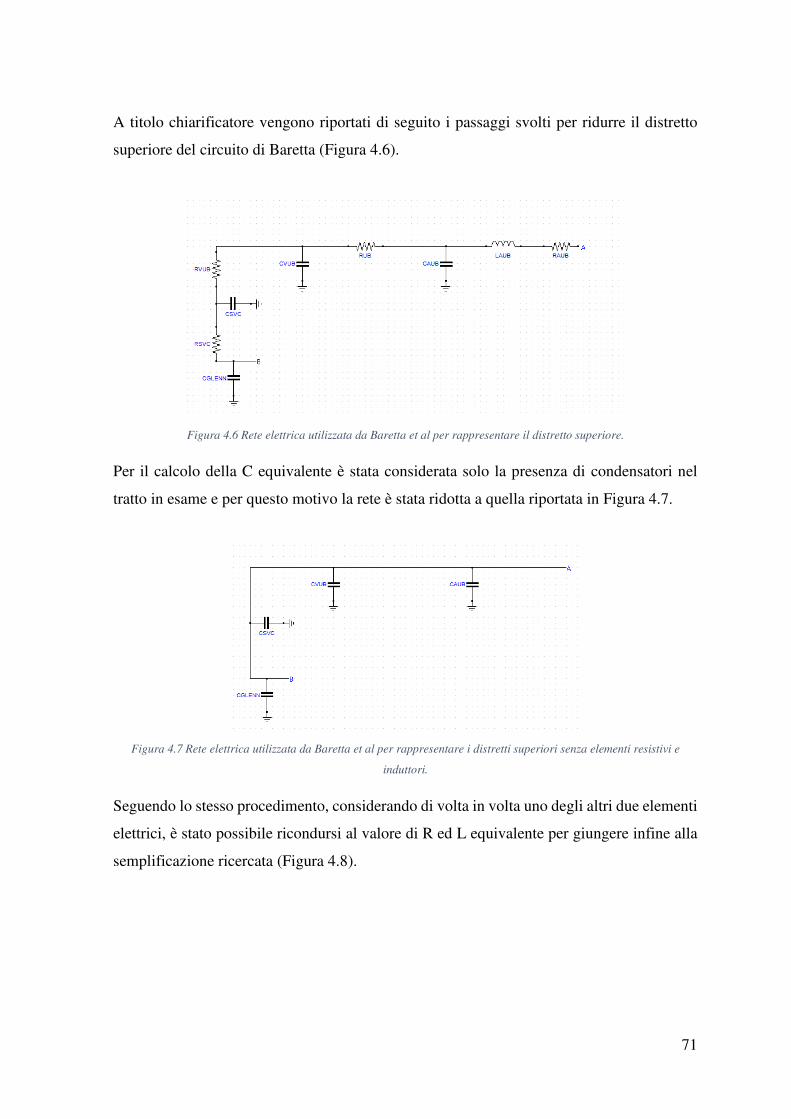
71
A titolo chiarificatore vengono riportati di seguito i passaggi svolti per ridurre il distretto
superiore del circuito di Baretta (Figura 4.6).
Figura 4.6 Rete elettrica utilizzata da Baretta et al per rappresentare il distretto superiore.
Per il calcolo della C equivalente è stata considerata solo la presenza di condensatori nel
tratto in esame e per questo motivo la rete è stata ridotta a quella riportata in Figura 4.7.
Figura 4.7 Rete elettrica utilizzata da Baretta et al per rappresentare i distretti superiori senza elementi resistivi e
induttori.
Seguendo lo stesso procedimento, considerando di volta in volta uno degli altri due elementi
elettrici, è stato possibile ricondursi al valore di R ed L equivalente per giungere infine alla
semplificazione ricercata (Figura 4.8).

72
Figura 4.8 Distretti superiori ottenuti con la semplificazione della rete di Baretta et al.
È da notare come nella riduzione dei tratti del circuito che simulano rispettivamente i distretti
inferiori e il distretto polmonare, la resistenza equivalente sia stata divisa in resistenza
prossimale e resistenza distale, riportandosi quindi ad un modello Windkessel a 4 elementi.
Nel caso dei distretti inferiori, il primo elemento resistivo rappresenta la resistenza offerta
da tutti i distretti inferiori a meno della vena cava che viene simulata separatamente
attraverso il secondo elemento.
Nel caso del distretto polmonare invece, la resistenza prossimale rappresenta la resistenza
offerta dai polmoni e dalle arterie polmonari mentre quella distale simula la resistenza offerta
dalla vena polmonare.
Per ottenere i valori di resistenza prossimale e resistenza distale di un determinato distretto,
è stato necessario dividere la resistenza equivalente. Per il calcolo viene mantenuto il
rapporto esistente tra la somma delle resistenze del circuito che avrebbero costituito la
resistenza prossimale e quella delle resistenze che avrebbero formato la resistenza distale.
L’ultimo elemento riportato nel circuito è un condensatore necessario per simulare l’arco
aortico.
In Tabella 4.2 sono riportati i valori dei parametri presenti nei modelli associati alle 3 BSA
di interesse, ottenuti con il procedimento sopra illustrato.

73
Tabella 4.2 Valori dei parametri del modello ridotto per ciascuna BSA.
Elementi circuito BSA 0.56 m2 BSA 0.67 m2 BSA 0.74 m2
Distretti superiori
R [mmHg·s/ml] 4,036 3,822 3,709
C [ml/mmHg] 1,567 1,711 1,798
L [mmHg·s^2/ml] 0,001 0,001 0,001
Polmoni
Rvp [mmHg·s/ml] 0,054 0,046 0,042
Rp [mmHg·s/ml] 0,316 0,269 0,246
C [ml/mmHg] 0,461 0,572 0,644
L [mmHg·s^2/ml] 0,002 0,002 0,002
Distretti inferiori
Rivc [mmHg·s/ml] 0,034 0,029 0,026
R [mmHg·s/ml] 5,975 4,785 4,225
C [ml/mmHg] 3,588 4,928 5,908
L [mmHg·s^2/ml] 0,002 0,002 0,002
Arco aortico C [ml/mmHg] 0,236 0,292 0,329
Si nota come i valori di resistenze e inertanze diminuiscano all’aumentare della BSA mentre
i valori di compliance aumentino. Risulta però evidente che i valori tra le 3 BSA non
differiscono significativamente.
Validazione del metodo
La rete ottenuta deve essere equivalente a quella di partenza (rete di Baretta [1]) quindi, per
prima cosa, è stata controllata l’equivalenza tra i due circuiti. L’equivalenza tra due circuiti
può essere valutata confrontando le funzioni di trasferimento (fdt) di ogni singolo distretto;
esse devono coincidere almeno per le frequenze di interesse. Nel caso in esame, il dispositivo
usato per simulare il singolo ventricolo, fornirà tra i 60 e i 120 battiti al minuto e per questo
motivo le due fdt dovranno coincidere per le frequenze di 1-2 Hz (6-12 rad/sec).
Questo calcolo viene effettuato tramite l’utilizzo di Sapwin (Cirlab, Università di Firenze,
ver. 3.0), un pacchetto software integrato di cattura schematica, analisi simbolica, grafica e
post processing per circuiti analogici lineari.
L’interfaccia del programma viene mostrata in Figura 4.9. La schermata principale presenta
un foglio bianco dove l’utente può disegnare il circuito usando gli strumenti comuni di

74
Windows per copiare, tagliare, incollare, muovere e modificare un componente o una parte
dello schema.
Figura 4.9 Interfaccia grafico Sapwin.
Innanzitutto è stata disegnata la rete, trascinando i componenti dalla barra presente a
sinistra della schermata o selezionandoli dalla finestra che si apre cliccando su Get. A
questo punto è stato possibile fissare il loro valore e rinominarli attraverso il click destro
del mouse sul componente disegnato.
Il passo successivo consiste nello scegliere l’uscita in tensione o in corrente attraverso le
relative icone evidenziate in verde in Figura 4.10. Quindi, è possibile calcolare la fdt
attraverso l’icona F(s) presente sulla barra superiore della schermata.
Figura 4.10 Comandi necessari al calcolo della funzione di trasferimento.
Una volta calcolate, le funzioni di trasferimento sono state implementate in MATLAB
tramite cui è stato possibile rappresentare il diagramma di Bode. Infine, per ogni distretto è
stato calcolato l’errore percentuale tra le funzioni di trasferimento dei due circuiti da
confrontare nelle diverse frequenze.

75
Di seguito, per ogni distretto, vengono riportati i grafici di Bode delle due funzioni di
trasferimento e l’andamento dell’errore percentuale tra di esse calcolato (Figura 4.11,
Figura 4.12, Figura 4.13, Figura 4.14, Figura 4.15, Figura 4.16). I grafici si riferiscono al
circuito associato ad una BSA di 0.67 m2.
Figura 4.11 Funzioni di trasferimento per il distretto polmonare per BSA pari a 0.67 m2.
Figura 4.12 Errore percentuale tra le fdt del distretto polmonare per BSA pari a 0.67 m2.

76
Figura 4.13 Funzioni di trasferimento per i distretti superiori per BSA pari a 0.67 m2.
Figura 4.14 Errore percentuale tra le fdt dei distretti superiori per BSA pari a 0.67 m2.

77
Figura 4.15 Funzioni di trasferimento per i distretti inferiori per BSA pari a 0.67 m2.
Figura 4.16 Errore percentuale tra le fdt dei distretti inferiori per BSA pari a 0.67m2.
Dai grafici si evince che, nell’intorno delle frequenze di interesse l’errore tra la funzione di
trasferimento riferita al circuito proposto da Baretta [1] e quella riferita al modello ridotto
risulta dello 0% nel caso di distretto polmonare, del 13% nel caso dei distretti superiori e
dell’11% nel caso dei distretti inferiori.
Il metodo utilizzato è quindi più preciso nel ridurre distretti in cui la portata si divide in due
rami caratterizzati dagli stessi elementi elettrici mentre, approssima con un maggior errore
la riduzione di distretti caratterizzati da un elevato numero di elementi elettrici e da diversi
rami intrecciati fra loro con caratteristiche totalmente differenti.

78
Simulazione dei modello in Simulink
In seguito all’assegnazione dei valori agli elementi delle tre reti elettriche, sono state
effettuate alcune simulazioni in Simulink per poter verificare l’andamento dei tracciati di
portate e pressioni al fine di verificarli coi valori ottenuti da cateterismo in vivo disponibili
in letteratura. Per ogni simulazione è stata impostata una frequenza di 100 bpm e una portata
di 1.2 l/min coerentemente con i valori medi riportati in letteratura per i pazienti pediatrici.
In questo capitolo vengono riportati i grafici risultanti dalle simulazioni.
Per la validazione del banco prova le curve che vengono valutate sono quelle che
rappresentano la portata aortica e le pressioni nei diversi distretti (aortico, distretto
polmonare, distretti superiori e distretti inferiore). Essendo un modello a parametri
concentrati, è bene notare che i valori di pressione e portata possono essere visualizzati solo
in entrata o in uscita dal distretto. Si è scelto di rappresentare le curve in uscita dove sono
state posizionate le porte di visualizzazione.
Tracciati relativi al circuito elettrico di Glenn per BSA pari a 0.56 m2
Di seguito vengono riportati i grafici riferiti al modello elettrico che rappresenta la
circolazione di Glenn nel caso di BSA pari a 0.56 m2. Essi mostrano l’andamento di portata
e pressione nel tratto aortico (Figura 4.17, Figura 4.18), l’andamento della pressione nel
distretto polmonare (Figura 4.19), quello all’uscita del distretto superiore (Figura 4.20) e
infine la pressione registrata all’uscita dei distretti inferiori (Figura 4.21).

79
Figura 4.17 Tracciato della portata in uscita dal tratto aortico del paziente Glenn-modello elettrico per BSA di 0.56 m2.
Figura 4.18 Tracciato della pressione in uscita dal tratto aortico del paziente Glenn-modello elettrico per BSA di 0.56
m2.
-0,2
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
0 3 6 9 12 15
Po
rta
ta [
l/m
in]
Tempo [s]
Portata in uscita dal distretto aortico - BSA 0.56 m2
0
10
20
30
40
50
60
70
80
0 3 6 9 12 15
Pre
ssio
ne
[ m
mH
g]
Tempo [s]
Pressione in uscita dal distretto aortico - BSA 0.56 m2

80
Figura 4.19 Tracciato della pressione in uscita dal distretto polmonare del paziente Glenn-modello elettrico per BSA di
0.56 m2.
Figura 4.20 Tracciato della pressione in uscita dal distretto sistemico superiore, coincidente con la pressione in ingresso
al distretto polmonare per il paziente Glenn-modello elettrico per BSA di 0.56 m2.
0
1
2
3
4
5
6
0 3 6 9 12 15
Pre
ssio
ne
[m
mH
g]
Tempo [s]
Pressione uscita distretti polmonari - BSA 0.56 m2
0
1
2
3
4
5
6
7
8
9
10
0 3 6 9 12 15
Pre
ssio
ne
[m
mH
g]
Tempo [s]
Pressione uscita distretti superiori - BSA 0.56 m2

81
Figura 4.21 Tracciato della pressione in uscita dal distretto sistemico inferiore del paziente Glenn-modello elettrico per
BSA di 0.56 m2.
Ogni distretto raggiuge la pressione caratteristica dopo un certo transitorio, dovuto alla
presenza di elementi complianti che ne determinano l’andamento.
Tracciati relativi al circuito elettrico di Glenn per BSA pari a 0.67 m2
Di seguito vengono riportati i grafici riferiti al modello elettrico che rappresenta la
circolazione di Glenn nel caso di BSA pari a 0.67 m2. Essi mostrano l’andamento di portata
e pressione nel tratto aortico (Figura 4.22, Figura 4.23), l’andamento della pressione nel
distretto polmonare (Figura 4.24), quello all’uscita dei distretti superiori (Figura 4.25) e
infine la pressione registrata all’uscita dei distretti inferiori (Figura 4.26).
0
1
2
3
4
5
6
0 3 6 9 12 15
Pre
ssio
ne
[m
mH
g]
Tempo [s]
Pressione uscita distretti inferiori - BSA 0.56 m2

82
Figura 4.22 Tracciato della portata in uscita dal tratto aortico del paziente Glenn-modello elettrico per BSA di 0.67 m2.
Figura 4.23 Tracciato della pressione in uscita dal tratto aortico del paziente Glenn-modello elettrico per BSA di 0.67
m2.
-0,2
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
0 3 6 9 12 15
Po
rta
ta [
l/m
in]
Tempo [s]
Portata in uscita dal distretto aortico per - BSA 0.67 m2
0
10
20
30
40
50
60
70
0 3 6 9 12 15
Pre
ssio
ne
[m
mH
g]
Tempo [s]
Pressione in uscita dal distretto aortico - BSA 0.67 m2
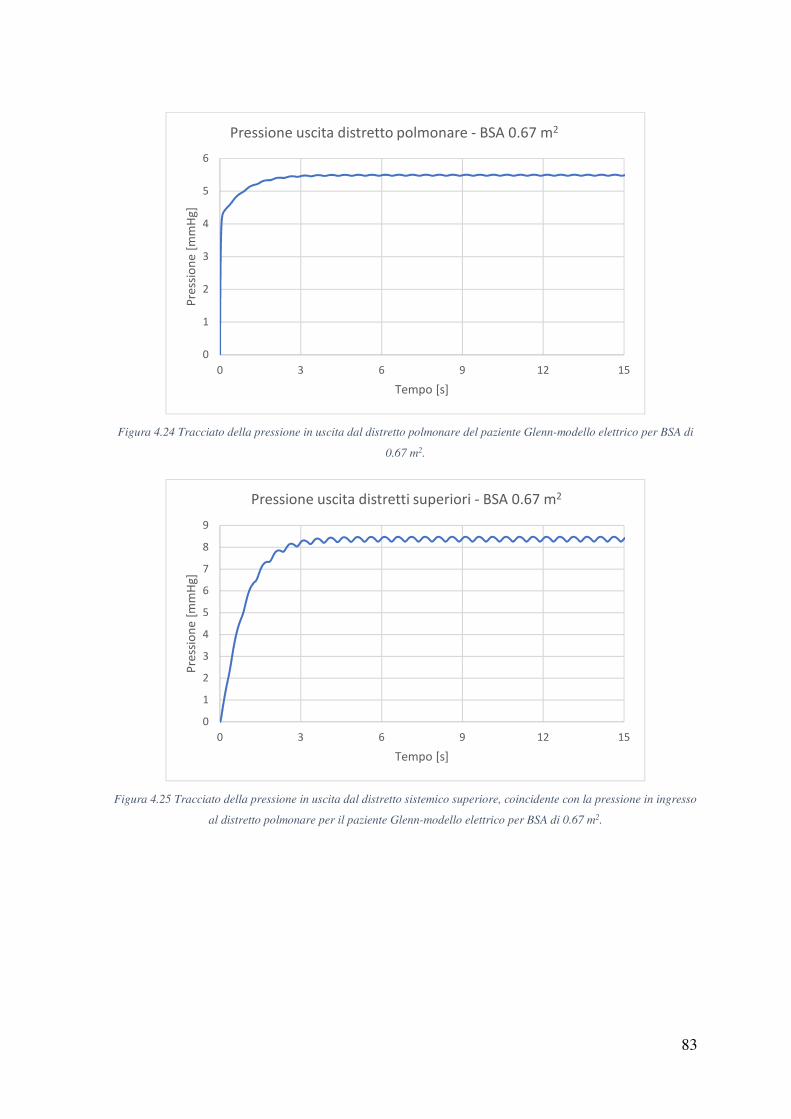
83
Figura 4.24 Tracciato della pressione in uscita dal distretto polmonare del paziente Glenn-modello elettrico per BSA di
0.67 m2.
Figura 4.25 Tracciato della pressione in uscita dal distretto sistemico superiore, coincidente con la pressione in ingresso
al distretto polmonare per il paziente Glenn-modello elettrico per BSA di 0.67 m2.
0
1
2
3
4
5
6
0 3 6 9 12 15
Pre
ssio
ne
[m
mH
g]
Tempo [s]
Pressione uscita distretto polmonare - BSA 0.67 m2
0
1
2
3
4
5
6
7
8
9
0 3 6 9 12 15
Pre
ssio
ne
[m
mH
g]
Tempo [s]
Pressione uscita distretti superiori - BSA 0.67 m2

84
Figura 4.26 Tracciato della pressione in uscita dal distretto sistemico inferiore del paziente Glenn-modello elettrico per
BSA di 0.67m2.
In Figura 4.27 vengono presentati i valori ricavati da cateterismo sui pazienti operati secondo
procedura di Glenn. Questi dati sono stati cortesemente forniti dal Dr. Griselli del Freeman
Hospital (Newcastle upon Tyne, Regno Unito). I risultati delle simulazioni sono nell’intorno
dei valori riportati.
Figura 4.27 Schema riassuntivo delle pressioni medie nei distretti anatomici di interesse per i pazienti Glenn di BSA 0.67
m2.
0
1
2
3
4
5
6
0 3 6 9 12 15
Pre
ssio
ne
[m
mH
g]
Tempo [s]
Pressione uscita distretti inferiori - BSA 0.67 m2
SVC/PA pressures Mean 12 (± 2 mmHg) Saturations 55% (±5)
Common atrial pressure Mean 6 (± 2 mmHg)
Aortic pressure Mean 50-60 mmHg Saturations 80% (±5)
End diastolic pressure Mean 6 (± 2 mmHg) Saturations 80% (±5)
IVC pressures Mean 6 (± 2 mmHg) Saturations 55% (±5)
We assume that pulmonary veins Saturations are 99%

85
Tracciati relativi al circuito elettrico di Glenn per BSA pari a 0.74 m2
Di seguito vengono riportati i grafici riferiti al modello elettrico che rappresenta la
circolazione di Glenn nel caso di BSA pari a 0.74 m2. Essi mostrano l’andamento di portata
e pressione nel tratto aortico (Figura 4.28, Figura 4.29), l’andamento della pressione nel
distretto polmonare (Figura 4.30), quello all’uscita dei distretti superiori (Figura 4.31) e
infine la pressione registrata all’uscita dei distretti inferiori (Figura 4.32).
Figura 4.28 Tracciato della pressione in uscita dal tratto aortico del paziente Glenn-modello elettrico per BSA di 0.74
m2.
-0,2
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
0 3 6 9 12 15
Po
rta
ta [
l/m
in]
Tempo [s]
Portata in uscita dal distretto aortico - BSA 0.74 m2

86
Figura 4.29 Tracciato della pressione in uscita dal tratto aortico del paziente Glenn-modello elettrico per BSA di 0.74
m2.
Figura 4.30 Tracciato della pressione in uscita dal distretto polmonare del paziente Glenn-modello elettrico per BSA di
0.74 m2.
0
10
20
30
40
50
60
70
0 3 6 9 12 15
Pre
ssio
ne
[m
mH
g]
Tempo [s]
Pressione in uscita dal distretto aortico - BSA 0.74 m2
0
1
2
3
4
5
6
0 3 6 9 12 15
Pre
ssio
ne
[m
mH
g]
Tempo [s]
Pressione in uscita distretti polmonari - BSA 0.74 m2

87
Figura 4.31 Tracciato della pressione in uscita dal distretto sistemico superiore, coincidente con la pressione in ingresso
al distretto polmonare per il paziente Glenn-modello elettrico per BSA di 0.74 m2.
Figura 4.32 Tracciato della pressione in uscita dal distretto sistemico inferiore del paziente Glenn-modello elettrico per
BSA di 0.74 m2.
Per quanto riguarda le BSA di 0.56 e di 0.74 m2 non sono disponibili i valori delle pressioni
a cavallo dei distretti studiati, ottenuti tramite cateterismo.
Confrontando i risultati ottenuti per ogni distretto nei tre casi analizzati si evince che i valori
di pressioni variano al più di qualche mmHg. Questo risultato viene giustificato dal fatto che
i valori dei parametri dei tre modelli analizzati non differiscono significativamente.
0
1
2
3
4
5
6
7
8
9
0 3 6 9 12 15
Pre
ssio
ne
[m
mH
g]
Tempo [s]
Pressione uscita distretti superiori - BSA 0.74 m2
0
1
2
3
4
5
6
0 3 6 9 12 15
Pre
ssio
ne
[m
mH
g]
Tempo [s]
Pressione uscita distretti inferiori - BSA 0.74 m2

88
5 Realizzazione del banco prova
In questo capitolo viene riportata la progettazione e la realizzazione dell’intero banco prova.
Dopo una breve introduzione sulla strumentazione di misura utilizzata per caratterizzare i
singoli elementi del circuito e validare l’intero banco, viene descritta la realizzazione di ogni
singolo elemento. Nel paragrafo dedicato alle resistenze è spiegato come, mezzi porosi,
realizzati tramite stampante 3D, possano essere dimensionati per simulare le diverse
resistenze dei distretti corporei. Segue poi il paragrafo riguardante gli elementi complianti
del circuito in cui ci si focalizza sul dimensionamento di casse d’aria per raggiungere i valori
desiderati. Infine, vi è la descrizione del sistema di controllo realizzato tramite l’uso di
Arduino, utile a controllare e regolare la frequenza cardiaca tramite l’utilizzo di
elettrovalvole.

89
Strumentazione utilizzata
In questo paragrafo verranno elencate e descritte tutte le apparecchiature utilizzate al fine di
monitorare e valutare le pressioni e le portate a cavallo degli elementi di interesse.
La scheda di acquisizione in dotazione (NI 6341, National Instruments) permette il
collegamento di 12 sensori non alimentati tramite TRS da 6.3 mm (Jack), e di 4 sensori
autoalimentati attraverso le uscite BNC (Figura 5.1). Questo strumento consente
l’acquisizione di segnali ad alta risoluzione (500 kS/s) con una dinamica di 16 bit.
I sensori collegati tramite TRS possono essere alimentati dalla scheda ad un voltaggio
compreso tra -10 V e +10 V regolabile tramite una manopola di precisione montata a
pannello.
Per il monitoraggio di pressioni e portate vengono collegati alla scheda uno o due trasduttori
di pressione e un flussimetro. I trasduttori di pressione sono connessi tramite jack e vengono
alimentati ad una tensione di + 8 V, il flussimetro invece è autoalimentato e quindi viene
collegato all’ingresso BNC.
Figura 5.1 Scheda di acquisizione e interfaccia grafica utente.
L’interfaccia utente viene gestita da un computer dotato di sistema operativo Windows 7,
sul quale è installato LabVIEW 9.0 (National Instruments Corporation, Austin) che permette
la registrazione e la visualizzazione dei segnali acquisiti, campionati a 200 Hz.

90
Per la lettura della pressione sono stati utilizzati trasduttori Micro Switch (Honeywell Inc.,
Freeport, USA) della serie 140PC, con un diverso fondo scala in base alla prova da effettuare
(Figura 5.2). I trasduttori in questione sono di tipo differenziale. Essi infatti presentano due
ingressi distinti utili a rilevare da una parte la pressione di riferimento (pressione
atmosferica) e dall’altra la pressione in esame. Il valore letto dall’utente corrisponde alla
differenza dei due valori misurati. La loro alimentazione deve essere di + 8 V, infatti, come
si legge da datasheet, per questo valore si ottengono le prestazioni migliori. Durante il corso
di questa tesi vengono utilizzati trasduttori di pressione con fondo scala 1 psi (51.7 mmHg),
5 psi (258,6 mmHg) e 15 psi (775,7 mmHg).
Figura 5.2 Trasduttore di pressione Micro Switch 142PC05D (Honeywell Inc.).
Le misurazioni di portata vengono invece affidate a sonde per flussimetro che si agganciano
direttamente all’esterno del tubo (Serie H-XL, Transonic) in cui passa il flusso. Il
funzionamento di queste sonde è basato sulla lettura di segnali ad ultrasuoni che incrociano
il flusso di liquido come mostrato in Figura 5.3. Questi segnali hanno frequenze che variano,
in base alla dimensione del tubo, tra 1.2 e 3.6 MHz. Il dispositivo in esame misura il tempo
di transito del segnale nelle quattro direzioni e associa ad esso un valore di portata.

91
Figura 5.3 Tecnologia transit-time ultrasound.
Queste sonde (Figura 5.4) sono ritenute il “Gold-Standard” nel campo della biomedica in
quanto permettono di mantenere l’integrità del tubo raggiungendo accuratezze di ±5%. Le
sonde utilizzate per le prove effettuate hanno diverse misure e si possono alloggiare su tubi
con diametro interno da ¼ a ½ “.
Figura 5.4 Sonda per flussimetro transonic H9XL.
I segnali in uscita dalle sonde vengono mandati ad un flussimetro (HT110 Bypass
Flowmeter, Transonic) che mostra a display il valore di portata misurato (Figura 5.5). In
base alla prova da effettuare si può utilizzare il flussimetro per leggere la portata media di
un flusso pulsatile oppure la portata di un flusso continuo. Per registrare istantaneamente la
misurazione della sonda, il flussimetro viene collegato ad uno degli ingressi BNC presenti
sulla scheda di acquisizione. Il segnale in uscita dal flussimetro, emesso sotto forma di
voltaggio, risulta proporzionale all’entità letta dalla sonda, e in base alle proprietà del flusso,
continuo o pulsatile, viene campionato ad una frequenza differente (0.1 Hz per flusso
continuo, 5 Hz nel caso di flusso pulsatile).

92
Figura 5.5 Flussimetro e sonda.
Infine per le prove è stata utilizzata una pompa centrifuga in grado di generare una portata
continua (Figura 5.6).
In laboratorio è in dotazione una pompa centrifuga (Delphin, Sarns 3M) con girante
magnetica rimovibile, dotata di una manopola a pannello tramite cui è possibile regolare il
numero di giri (al massimo 3600 rpm). La portata erogata dalla pompa dipende dal post-
carico e può arrivare al massimo a 9.9 l/min.
Figura 5.6 Pompa centrifuga Delphin.

93
Resistenza idraulica
Per ogni distretto rappresentato nel circuito è stato realizzato un elemento resistivo ed uno
capacitivo al fine di simulare al meglio il comportamento del sistema circolatorio.
Entrambi gli elementi devono sottostare a delle specifiche di progetto che li rendono idonei
al loro scopo.
Per quanto riguarda la resistenza essa deve garantire in primis un flusso alla Poiseuille,
caratterizzato da un rapporto lineare tra caduta di pressione e portata, deve essere regolabile,
in modo da poter simulare diverse condizioni fisiopatologiche e infine deve avere ingombro
limitato ed essere di semplice utilizzo.
5.2.1 Stato dell’arte delle resistenze idrauliche
In letteratura sono presenti diverse soluzioni tecniche per realizzare l’elemento resistivo.
Le più comuni sono riportate di seguito.
Singolo condotto (Figura 5.7).
Figura 5.7 Resistenza a singolo condotto.
Tale dispositivo garantisce una relazione lineare tra portata e caduta di pressione attenendosi
alla legge di Poiseuille:
∆� = 128 ∙ O ∙ �� ∙ P� ∙ � 9.
dove:
• ∆P è la caduta di pressione a cavallo del condotto [Pa];
• O è la viscosità del fluido utilizzato [Pa⋅s];
• L è la lunghezza del condotto [m];
• D è il diametro del condotto [m];
• Q è la portata che attraversa il condotto [m3/s].

94
Il coefficiente proporzionale tra ΔP e Q rappresenta la resistenza offerta dal condotto. Questo
dispositivo risulta di semplice utilizzo e, se scelto con opportuno diametro, anche di
ingombro limitato. Tuttavia è difficilmente regolabile a meno di sostituzione del tubo stesso
con uno a diametro o lunghezza differente.
Tubi in parallelo.
Figura 5.8 Resistenza a condotti paralleli.
Con la configurazione riportata in Figura 5.8, in cui, per semplicità vengono considerati due
soli tubi in parallelo è possibile ottenere tre valori differenti di resistenza: i primi due si
ottengono bloccando rispettivamente l’accesso di uno dei due tubi, il terzo valore invece è
dato dal parallelo delle due resistenze.
Immaginando di aumentare il numero di tubi, le possibili combinazioni tra le resistenze
porterebbero a maggiore regolabilità, seppur sempre discreta. All’aumentare del numero dei
canali, tuttavia, si nota una perdita di linearità della curva di interesse dovuta a perdite di
carico concentrate nelle zone di raccordo.
Mezzo poroso.
Figura 5.9 Resistenza con mezzo poroso.
Il flusso in un mezzo poroso può essere descritto macroscopicamente dalla legge di Darcy
che garantisce linearità tra ΔP e Q:
∆� = O ∙ �R ∙ � ∙ � 10.
dove:

95
• � è la portata di fluido [m3/s];
• L è la lunghezza del campione [m];
• O è la viscosità del fluido utilizzato [Pa ∙ s]; • R è la permeabilità del mezzo poroso [mW]; • � è la sezione di passaggio [m2];
• ∆� è la caduta di pressione ai capi del mezzo poroso [Pa].
Questo dispositivo risulta di facile utilizzo e di piccolo ingombro ma è difficilmente
regolabile. Per variare il valore resistivo bisognerebbe agire sulla permeabilità (k) variando
il mezzo utilizzato. Tale operazione risulta poco pratica e anche imprecisa.
Strozzatura (rubinetto).
Se si considera un tubo deformabile è possibile, variando l’area di passaggio tramite un
rubinetto, regolare con continuità la resistenza (Figura 5.10).
Figura 5.10 Resistenza con strozzatura in un tubo.
La brusca riduzione di sezione introdotta, causa, tuttavia, perdite di carico concentrate con
conseguente perdita di linearità della curva ∆P-Q e fenomeni di turbolenza indesiderati.
∆� = Y ∙ ��W ∙ 2 ∙ �W; 11.
dove:
• K è un parametro definibile sperimentalmente;
• � è la densità del fluido [kg/m3];
• � è la sezione di passaggio [m2];
• � è la portata di fluido [m3/s].
Pressore con molla (Figura 5.11).

96
Figura 5.11 Resistenza con strozzatura e pressore con molla.
Tale soluzione prevede un tubo deformabile con rubinetto cedevole (munito di molla) che
regola il vincolo di forma in funzione della pressione impartita dal fluido (Figura 5.12,
Figura 5.13).
Figura 5.12 Variazione di sezione nel condotto con strozzatura e pressore con molla.
Figura 5.13 Disegno costruttivo del pressore con molla.
Tramite una vite, è possibile agire sulla quota (z) del piatto di azione (acting plate); esso
impartisce uno spostamento del piatto di carico (loading plate) che comprime il tubo,
variandone la sezione.
La presenza della molla tra i due piatti porta a variazione della posizione (c) del piatto di
carico verso una configurazione di equilibrio, dipendente, oltre che dalla quota z impartita,

97
anche dalla portata nel condotto: a parità di quota z imposta, all’aumentare della portata di
fluido (e quindi della pressione interna), la quota c diminuisce e la sezione trasversale risulta
maggiore; viceversa, se la portata diminuisce, si ha una diminuzione della pressione interna
e un aumento della quota c, risultando in un tubo maggiormente occluso. Tale meccanismo
di autoregolazione garantisce linearità della curva ∆P-Q, in quanto al variare della portata ci
si sposta su parabole adiacenti (Figura 5.14) che descrivono comportamenti per diversi livelli
di compressione del tubo (livello 1, 2, 3 in ordine crescente di compressione).
Figura 5.14 Variazione del punto di equilibrio del dispositivo a parità di quota z imposta.
È inoltre possibile ottenere pendenze diverse (R diverse) variando i parametri L, k, z.
0
20
40
60
80
100
120
0 2 4 6 8 10
De
lta
P [
mm
Hg
]
Portata [l/min]
Resistenza nel pressore con molla
caratteristica con
piatto a livello 1
caratteristica con
piatto a livello 2
caratteristica con
piatto a livello 3
resistenza

98
Figura 5.15 Rappresentazione del valore resistivo.
Il pressore con molla risulta lineare, di semplice utilizzo e poco ingombrante. Lo svantaggio
è che la regolazione risulta difficilmente controllabile.
In questo lavoro di tesi, si è scelto di costruire gli elementi resistivi tramite un sistema
bicomponente formato da un cilindro cavo di materiale poroso e da una barra piena con
diametro pari a quello della cavità interna del cilindro (Figura 5.16).
Figura 5.16 Mezzo poroso e barra.
La resistenza offerta dal materiale poroso varia al variare della posizione della barra al suo
interno. Essa infatti può essere posta in posizione completamente occlusiva, per cui il sistema
offre la massima resistenza, oppure, in posizione non totalmente occlusiva, il cui la
resistenza ottenuta è minore.
Trattandosi di un materiale poroso, la linearità di tale resistenza è garantita dalla legge di
Darcy. Tale legge descrive il moto di un fluido all’interno di un mezzo poroso e stabilisce
un rapporto proporzionale tra la portata imposta al fluido e la caduta di pressione, registrata

99
ai capi del materiale poroso. La costante di proporzionalità è R e rappresenta la resistenza
offerta dal mezzo poroso.
Δ� = � ∙ � 12.
R dipende a sua volta dalle dimensioni e dalle caratteristiche del campione e può essere
definita come:
� = � ∙ ?� 13.
Dove:
• l è la lunghezza del campione [m];
• A è la sezione di ingresso del fluido nel campione [m2];
• ρ è la resistività del mezzo che dipende dalle caratteristiche intrinseche dello stesso
[mmHg·min/dm2].
Per ottenere la relazione tra caduta di pressione e portata normalizzata è necessario sostituire
l’equazione 13 nell’equazione 12, ottenendo così l’equazione 14 utile per il calcolo della
resistività.
Δ�? = � ∙ �� 14.
Il grande vantaggio riscontrato nell’utilizzare un sistema bicomponente rispetto ad un
singolo materiale poroso è la facilità con cui può essere regolato il valore di resistenza offerto
dal sistema. I materiali utilizzati per la realizzazione degli elementi resistivi sono il
plexiglass per la barra e il PLA per il mezzo poroso. Al fine di ottenere un campione con
porosità controllata si è scelto di realizzarlo tramite stampa 3D.
5.2.2 Caratterizzazione e dimensionamento degli elementi resistivi
Le resistenze vascolari rappresentano le resistenze che il flusso di sangue deve superare per
attraversare l’intero sistema circolatorio. La loro unità di misura, secondo il Sistema
Internazionale, corrisponde a Pa∙s/m3 ma, poichè solitamente la pressione sanguigna viene

100
misurata in mmHg e la gittata cardiaca in l/min, si assume come unità il mmHg∙min/l.
Questa unità di misura ibrida, nota come Wood Units (WU) viene utilizzata comunemente
in ambito biomedicale. La Tabella 5.1 riporta i valori delle resistenze, da replicare nella
costruzione del banco prova, convertite in Wood Units.
Tabella 5.1 Valori delle resistenze per le tre BSA di interesse. Le sigle riportate in tabella si riferiscono alla resistenza
dei distretti superiori (Rub), alla resistenza dei distretti inferiori (Rlb), alla resistenza polmonare (Rp), alla resistenza
della vena polmonare (Rvp) e alla resistenza della vena cava inferiorie (Rivc)
BSA 0.56 m2
Rub [WU] 67.3
Rvp [WU] 0.8
Rp [WU] 5.3
Rivc [WU] 0.5
Rlb [WU] 99.5
BSA 0.67 m2
Rub [WU] 63.7
Rvp [WU] 0.8
Rp [WU] 4.5
Rivc [WU] 0.5
Rlb [WU] 79.8
BSA 0.74 m2
Rub [WU] 61.8
Rvp [WU] 0.7
Rp [WU] 4.2
Rivc [WU] 0.5
Rlb [WU] 70.3
Oltre alle resistenze associate ad ogni distretto si è deciso di realizzare un elemento resistivo
del valore di 1 WU (Rp1WU). Questo valore corrisponde a quello che la resistenza
polmonare assume nel primo periodo dopo l’intervento di Glenn. I valori delle resistenze
utilizzate in questo lavoro di tesi, infatti, corrispondono a quelli riscontrati in pazienti
pediatrici in fase tardiva di Glenn, ossia in attesa dell’operazione di Fontan. La realizzazione
di questa resistenza extra permetterà quindi di esaminare la variazione di portate e pressioni
durante tutto il periodo che trascorre tra intervento di Glenn e intervento di Fontan.
Per ottenere questi valori si è deciso di utilizzare dei provini porosi stampati tramite
stampante 3D (Prusa i3, RepRap) disponibile in laboratorio. Per generare il gcode, ossia la
sequenza di comandi necessaria per descrivere il percorso che la macchina deve eseguire
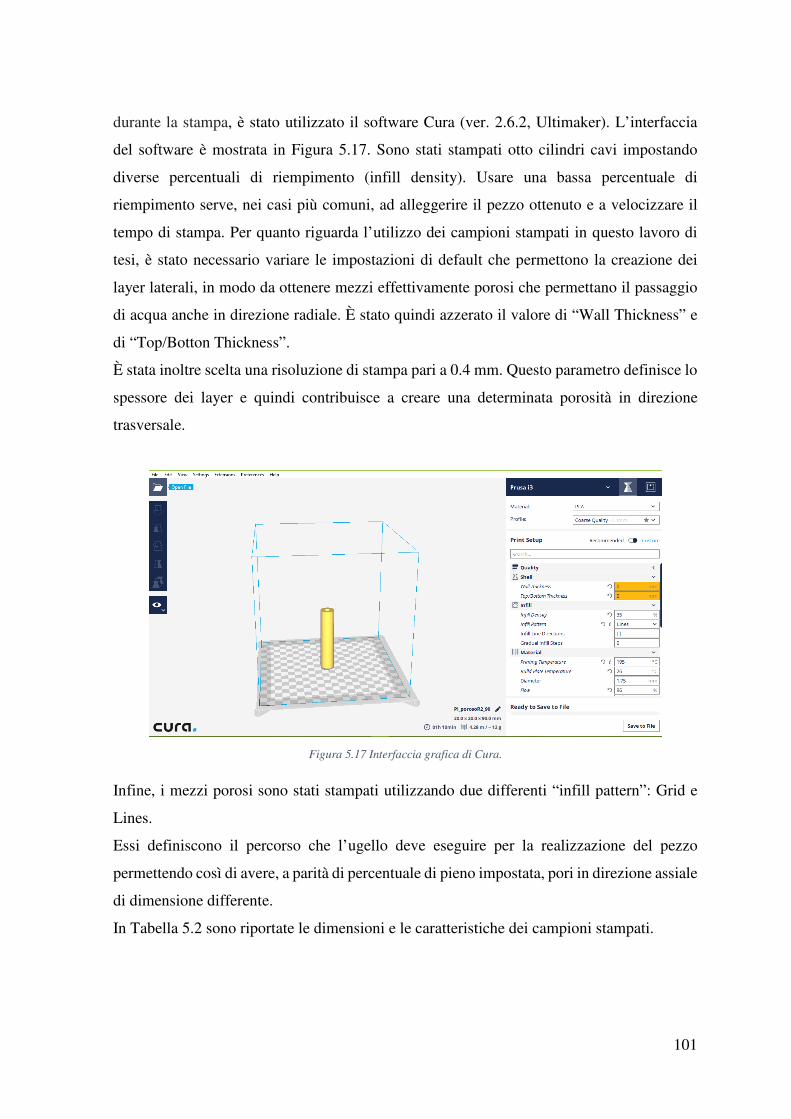
101
durante la stampa, è stato utilizzato il software Cura (ver. 2.6.2, Ultimaker). L’interfaccia
del software è mostrata in Figura 5.17. Sono stati stampati otto cilindri cavi impostando
diverse percentuali di riempimento (infill density). Usare una bassa percentuale di
riempimento serve, nei casi più comuni, ad alleggerire il pezzo ottenuto e a velocizzare il
tempo di stampa. Per quanto riguarda l’utilizzo dei campioni stampati in questo lavoro di
tesi, è stato necessario variare le impostazioni di default che permettono la creazione dei
layer laterali, in modo da ottenere mezzi effettivamente porosi che permettano il passaggio
di acqua anche in direzione radiale. È stato quindi azzerato il valore di “Wall Thickness” e
di “Top/Botton Thickness”.
È stata inoltre scelta una risoluzione di stampa pari a 0.4 mm. Questo parametro definisce lo
spessore dei layer e quindi contribuisce a creare una determinata porosità in direzione
trasversale.
Figura 5.17 Interfaccia grafica di Cura.
Infine, i mezzi porosi sono stati stampati utilizzando due differenti “infill pattern”: Grid e
Lines.
Essi definiscono il percorso che l’ugello deve eseguire per la realizzazione del pezzo
permettendo così di avere, a parità di percentuale di pieno impostata, pori in direzione assiale
di dimensione differente.
In Tabella 5.2 sono riportate le dimensioni e le caratteristiche dei campioni stampati.

102
Tabella 5.2 Caratteristiche e dimensioni dei provini porosi.
% pieno
Infill Pattern
Diametro esterno [mm]
Diametro interno [mm]
Lunghezza [mm]
50 Grid 19 8 40
40 Grid 19 8 40
30 Grid 19 8 40
35 Lines 20 8 60
25 Lines 20 8 39
18 Lines 20 8 34
15 Lines 20 8 35
12 Lines 20 8 40
Dai valori riportati si può notare come il diametro esterno vari tra le stampe con diverso infill
pattern. Il tubo in dotazione per la caratterizzazione dei mezzi realizzati, ha un diametro
interno pari a 20 mm e per questo motivo, tutti i campioni sono stati progettati con un
diametro esterno dello stesso valore. Sono stati stampati inizialmente i mezzi porosi con
infill pattern “Grid”. È stato quindi misurato il loro diametro esterno che è risultato di 19
mm invece che 20. Questa riduzione di diametro può essere giustificata dal fatto che nelle
impostazioni di stampa è stato azzerato il valore di “Wall Thickness” e che quindi non è
stato stampato l’ultimo layer esterno. Dopo questo accorgimento i mezzi porosi del tipo
Lines, stampati successivamente, sono stati ottenuti utilizzando un disegno CAD in cui il
diametro esterno assumeva come valore 21 mm in modo da ottenere un provino con diametro
effettivo di 20.
Tutti i campioni realizzati sono stati caratterizzati attraverso il set up sperimentale riportato
in Figura 5.18.

103
Figura 5.18 Set-up sperimentale allestito per la caratterizzazione degli elementi resistivi. 1- Pompa centrifuga (Delphin
Control Module, Sarns 3M Health Care), dotata di tubo di aspirazione e di mandata; 2- Tubo di mandata da 3/8”; 3-
Flussimetro (Bypass Flow meter HT110, Transonic Systems Inc.); 4- Sonda (H9XL805, Transonic System Inc.) ad tubi da
3/8”; 5- Condotto rigido di dimensioni idonee a contenere mezzo poroso e barra dotato di accesso per trasduttori di
pressione a monte e a valle del campione poroso; 6- Campione poroso con barra inserita; 7- Rete metallica necessaria
ad evitare lo scivolamento del campione durante le prove Rete metallica necessaria ad evitare lo scivolamento del
campione durante le prove; 8- Trasduttori di pressione (142PC05D, Honeywell); 9- Tubo di aspirazione da 3/8”;10-
Reservoir.
Sono state effettuate due prove differenti: nella prima la barra è stata inserita all’interno del
mezzo poroso per tutta la sua lunghezza, mentre nella seconda solo per un centimetro.
Il protocollo di prova utilizzato per testare i provini è descritto di seguito:
1. Montaggio del set up sperimentale: tutti i componenti del circuito sono stati
assemblati insieme in modo da garantire la tenuta idraulica. All’interno del condotto
rigido è stato posizionato il mezzo poroso e la barra, precedentemente avvolti in
teflon per aumentare l’interferenza degli accoppiamenti.
2. Calibrazione: I sensori di pressione sono stati collegati al manometro a mercurio
(Figura 5.19) tramite cui sono state imposte due pressioni, che inserite nella scheda
di acquisizione hanno permesso di creare la retta di calibrazione degli stessi.
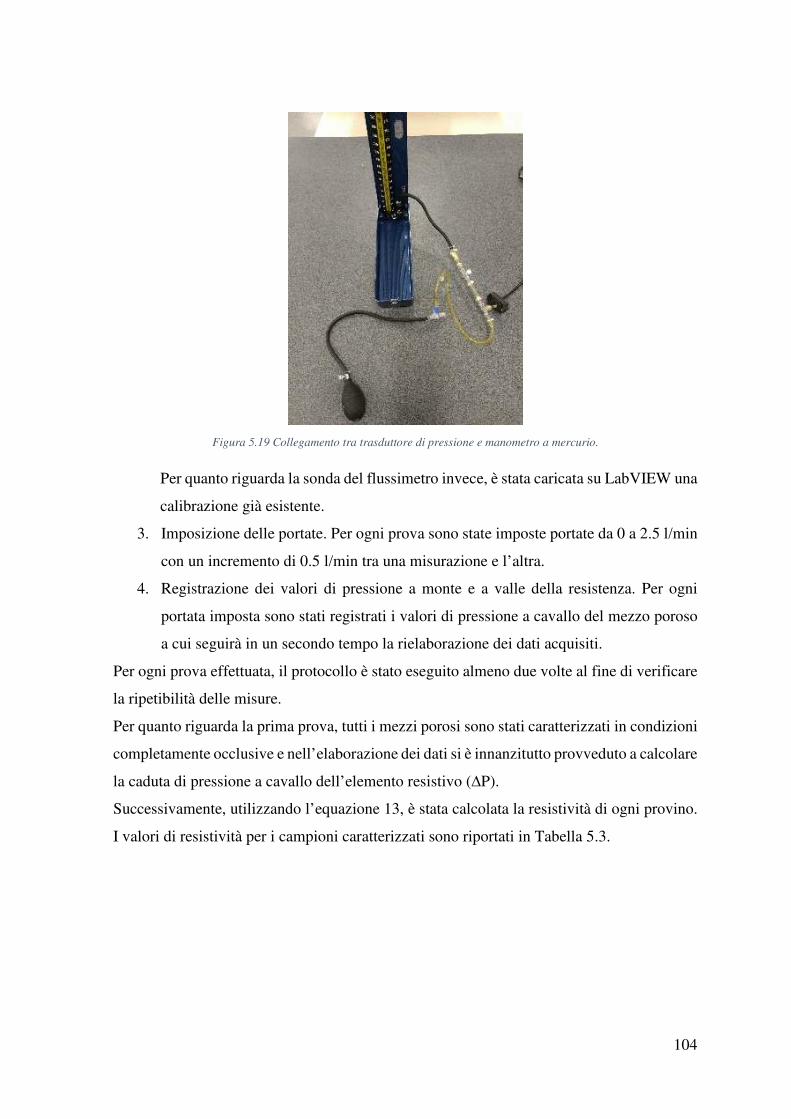
104
Figura 5.19 Collegamento tra trasduttore di pressione e manometro a mercurio.
Per quanto riguarda la sonda del flussimetro invece, è stata caricata su LabVIEW una
calibrazione già esistente.
3. Imposizione delle portate. Per ogni prova sono state imposte portate da 0 a 2.5 l/min
con un incremento di 0.5 l/min tra una misurazione e l’altra.
4. Registrazione dei valori di pressione a monte e a valle della resistenza. Per ogni
portata imposta sono stati registrati i valori di pressione a cavallo del mezzo poroso
a cui seguirà in un secondo tempo la rielaborazione dei dati acquisiti.
Per ogni prova effettuata, il protocollo è stato eseguito almeno due volte al fine di verificare
la ripetibilità delle misure.
Per quanto riguarda la prima prova, tutti i mezzi porosi sono stati caratterizzati in condizioni
completamente occlusive e nell’elaborazione dei dati si è innanzitutto provveduto a calcolare
la caduta di pressione a cavallo dell’elemento resistivo (∆P).
Successivamente, utilizzando l’equazione 13, è stata calcolata la resistività di ogni provino.
I valori di resistività per i campioni caratterizzati sono riportati in Tabella 5.3.

105
Tabella 5.3 Valore di resistività dei mezzi porosi caratterizzati.
% pieno Infill Pattern ρ [mmHg∙min/dm2]
50 Grid 2.66
40 Grid 1.15
30 Grid 0.48
35 Lines 0.40
25 Lines 0.16
18 Lines 0.10
15 Lines 0.11
12 Lines 0.06
Ogni valore di resistività viene utilizzato per trovare la lunghezza che il campione in esame
dovrebbe avere per poter simulare i valori di resistenza dei distretti associati alla BSA 0.56
m2. Il dimensionamento è stato fatto utilizzando le resistenze associate a questa BSA perché
risultano avere valori maggiori delle altre due.
Oltre al grafico relativo alla resistività, con i dati acquisiti nella prima prova è stato costruito
il grafico Δ�-Q che fornisce il massimo valore di resistenza ottenuto dal campione in esame.
In seguito, con i dati acquisiti dalla seconda prova è stato ottenuto il grafico Δ�-Q, relativo
al minimo valore di resistenza che lo stesso campione può offrire.
I campioni ottenuti dalla stampa 3D non sono ortotropi, in quanto, i pori trasversali, dovuti
alla distanza tra i vari layer, risultano sempre molto più piccoli di quelli presenti in direzione
assiale. A causa di questa conformazione è possibile trascurare il contributo resistivo della
parte di campione in cui non è inserita la barra, e ipotizzare che la resistenza aumenti
linearmente con l’inserimento della stessa. Ciò significa che il valore di resistenza minimo
offerto dal campione varierà di poco anche allungando quest’ultimo. Due campioni stampati
con la stessa percentuale di pieno ma con lunghezza diversa offrono lo stesso valore di
resistenza, se in essi la barra viene inserita per un solo centimetro. È importante verificare
che il valore di resistenza minima sia uguale o minore a quello che si vuole replicare.
Per il dimensionamento sono state scelte, innanzitutto, le percentuali di pieno che
permettono di ottenere elementi resistivi con lunghezze accettabili. In Tabella 5.4 viene
indicata la percentuale di pieno scelta per replicare la resistenza di ogni distretto e la
lunghezza utile ad ottenere i valori desiderati.

106
Tabella 5.4 Percentuale di pieno e lunghezza scelta per replicare le resistenze delle BSA in esame.
% pieno scelta Infill Pattern lunghezza [mm]
Rub 50 Grid 59
Rvp 15 Lines 21
Rp 35 Lines 36
Rivc 12 Lines 22
Rlb 50 Grid 87
Rp 1WU 18 Lines 18
Dopo questa operazione è stato esaminato il range di resistenze offerte dai mezzi porosi
caratterizzati (Tabella 5.5).
Tabella 5.5 Resistenza massima e resistenza minima offerte dai campioni di interesse caratterizzati.
% pieno Infill Pattern
Resistenza massima [WU]
Resistenza minima [WU]
50 Grid 45.6 17.5
35 Lines 9.0 4.0
18 Lines 1.3 0.9
15 Lines 1.4 0.7
12 Lines 0.9 0.6
Confrontando i dati riportati in Tabella 5.1 con quelli presenti in Tabella 5.5 si evince che i
range di resistenza offerti dai campioni caratterizzati sono sufficienti per rappresentare la
resistenza della vena polmonare, la resistenza polmonare, la resistenza della vena cava
inferiore e la resistenza polmonare con valore fisso a 1WU, in tutte e 3 le BSA di interesse.
Per convenienza, quindi, si è scelto di usare nel banco prova questi campioni regolando la
lunghezza di inserimento della barra per ottenere i valori ricercati.
Per quanto riguarda invece la resistenza dei distretti superiori (Rub) e quella dei distretti
inferiori (Rlb) è stato necessario realizzare nuovi campioni. Per considerare eventuali
approssimazioni si è deciso di stampare queste ultime due resistenze con lunghezze pari a
60 e 90 mm rispettivamente aggiungendo un margine ai valori mostrati i Tabella 5.4.
Una volta stampati, questi campioni sono stati caratterizzati a loro volta. In Figura 5.20,
Figura 5.21 e Figura 5.22 sono riportati i grafici relativi alla caratterizzazione della resistenza
associata ai distretti superiori, mentre in Figura 5.23, Figura 5.24 e Figura 5.25 quelli relativi
alla caratterizzazione della resistenza dei distretti inferiori.

107
Figura 5.20 Curva ΔP /l-v ottenuta dalla caratterizzazione dell'elemento resistivo con barra inserita per tutta la sua
lunghezza.
Figura 5.21 Curva ΔP-Q ottenuta dalla caratterizzazione dell'elemento resistivo con barra inserita per tutta la sua
lunghezza.
y = 3,358x - 51,143
R² = 0,985
0
50
100
150
200
250
300
350
400
0 40 80 120
ΔP
/l[
mm
Hg
/dm
]
velocità [dm/min]
Resistività distretti superiori
Resistività
Resistività valori di
interesse
Interpolazione lineare
nei valori di interesse
y = 84,189x - 30,686
R² = 0,9854
0
50
100
150
200
250
0 1 2 3
ΔP
[m
mH
g]
Q [l/min]
Resistenza massima distretti superiori
Resistenza massima
Resistenza massima
valori di interesse
Interpolazione lineare
nei valori di interesse

108
Figura 5.22 Curva ΔP -Q ottenuta dalla caratterizzazione dell'elemento resistivo con barra inserita al suo interno per un
cm.
Figura 5.23 Curva ΔP /l-v ottenuta dalla caratterizzazione dell'elemento resistivo con barra inserita per tutta la sua
lunghezza.
y = 23,035x - 8,5809
R² = 0,9831
0
10
20
30
40
50
60
70
0 1 2 3
ΔP
[m
mH
g]
Q [l/min]
Resistenza minima distretti superiori
Resistenza minima
Resistenza minima
valori di interesse
Interpolazione lineare
nei valori di interesse
y = 3,753x - 59,187
R² = 0,9825
0
50
100
150
200
250
300
350
400
450
0 40 80 120
ΔP
/l [
mm
Hg
/dm
]
velocità [dm/min]
Resistività distretti inferiori
Resistività
Resistività valori di
interesse
Interpolazione lineare
nei valori di interesse

109
Figura 5.24 Curva ΔP -Q ottenuta dalla caratterizzazione dell'elemento resistivo con barra inserita per tutta la sua
lunghezza.
Figura 5.25 Curva ΔP-Q ottenuta dalla caratterizzazione dell'elemento resistivo con barra inserita al suo interno per 1
cm.
Analizzando i grafici riportati possono essere fatte due considerazioni. Innanzitutto si
possono confrontare i valori di resistività riscontrati dalla caratterizzazione dei due nuovi
campioni (3.35 mmHg·min/dm2 per Rub e 3.75 mmHg·min/dm2 per Rlb) con il valore di
resistività con cui essi sono stati progettati (2.66 mmHg·min/dm2). Da questo confronto si
evince che l’errore percentuale tra i valori di resistività arriva al 29%. Questa variazione può
y = 144,8x - 53,268
R² = 0,9825
0
50
100
150
200
250
300
350
400
0 1 2 3
ΔP
[m
mH
g]
Q [l/min]
Resistenza massima distretti inferiori
Resistenza massima
Resistenza massima
valori di interesse
Interpolazione lineare
nei valori di interesse
y = 22,549x - 7,9648
R² = 0,9902
0
10
20
30
40
50
60
0 1 2 3
ΔP
[m
mH
g]
Q[l/min]
Resistenza mininima distretti inferiori
Resistenza minima
Resistenza minima
valori di interesse
Interpolazione lineare
nei valori di interesse
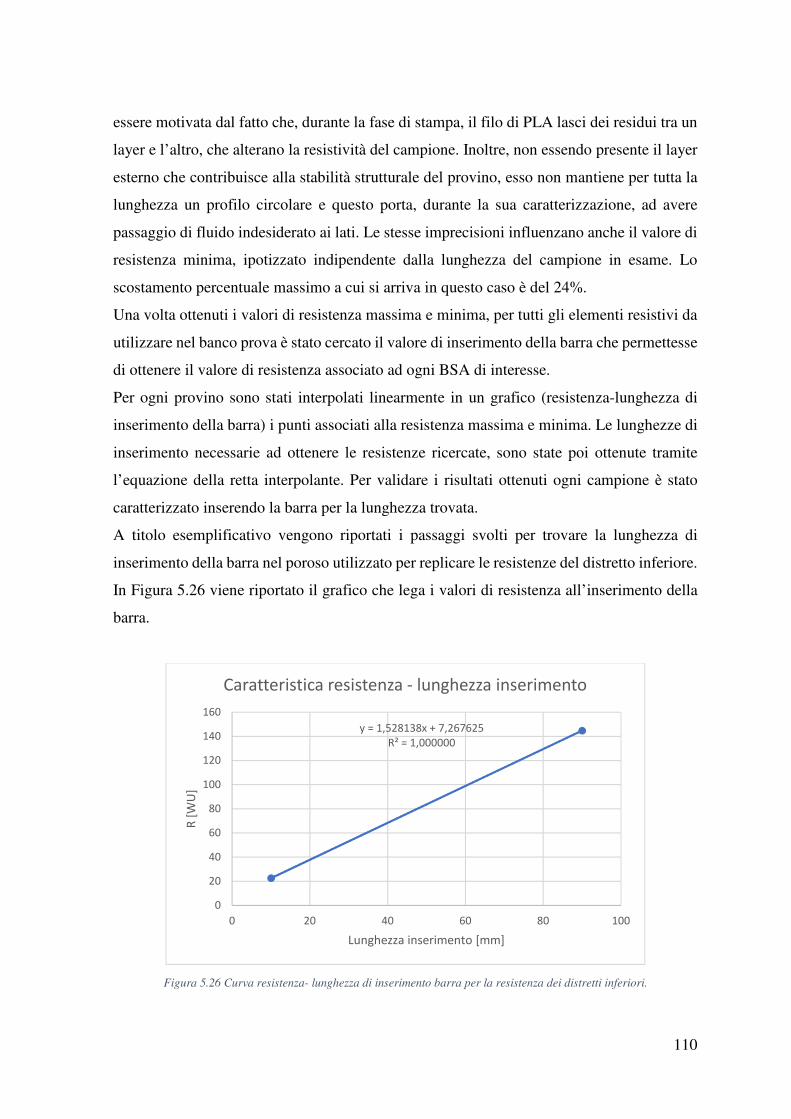
110
essere motivata dal fatto che, durante la fase di stampa, il filo di PLA lasci dei residui tra un
layer e l’altro, che alterano la resistività del campione. Inoltre, non essendo presente il layer
esterno che contribuisce alla stabilità strutturale del provino, esso non mantiene per tutta la
lunghezza un profilo circolare e questo porta, durante la sua caratterizzazione, ad avere
passaggio di fluido indesiderato ai lati. Le stesse imprecisioni influenzano anche il valore di
resistenza minima, ipotizzato indipendente dalla lunghezza del campione in esame. Lo
scostamento percentuale massimo a cui si arriva in questo caso è del 24%.
Una volta ottenuti i valori di resistenza massima e minima, per tutti gli elementi resistivi da
utilizzare nel banco prova è stato cercato il valore di inserimento della barra che permettesse
di ottenere il valore di resistenza associato ad ogni BSA di interesse.
Per ogni provino sono stati interpolati linearmente in un grafico (resistenza-lunghezza di
inserimento della barra) i punti associati alla resistenza massima e minima. Le lunghezze di
inserimento necessarie ad ottenere le resistenze ricercate, sono state poi ottenute tramite
l’equazione della retta interpolante. Per validare i risultati ottenuti ogni campione è stato
caratterizzato inserendo la barra per la lunghezza trovata.
A titolo esemplificativo vengono riportati i passaggi svolti per trovare la lunghezza di
inserimento della barra nel poroso utilizzato per replicare le resistenze del distretto inferiore.
In Figura 5.26 viene riportato il grafico che lega i valori di resistenza all’inserimento della
barra.
Figura 5.26 Curva resistenza- lunghezza di inserimento barra per la resistenza dei distretti inferiori.
y = 1,528138x + 7,267625
R² = 1,000000
0
20
40
60
80
100
120
140
160
0 20 40 60 80 100
R [
WU
]
Lunghezza inserimento [mm]
Caratteristica resistenza - lunghezza inserimento

111
Sostituendo i valori delle resistenze desiderate nell’equazione della retta è stato possibile
ottenere le lunghezze di inserimento della barra riportate in Tabella 5.6.
Tabella 5.6 Lunghezze di inserimento necessarie ad ottenere le resistenze ricercate.
BSA [m2] 0,6 0,7 0,7
Rlb [WU] 99,5 79,8 70,3
Lunghezza inserimento [mm] 60,4 47,5 41,3
In Figura 5.27 e Figura 5.28 sono riportati i grafici ΔP-Q relativi alla caratterizzazione del
provino con le lunghezze di inserimento presenti in Tabella 5.6, utili ad ottenere il valore di
resistenza associato ai distretti inferiori per le BSA di 0.56 e 0.74 m2.
Figura 5.27 Resistenza dei distretti inferiori associata a BSA di 0.56 m2.
y = 100,20404x - 36,63502
R² = 0,98424
0
50
100
150
200
250
300
0 1 2 3
ΔP
[m
mH
g]
Q [l/min]
Resistenza distretti inferiori - BSA 0.56
Resistenza LB BSA 0.56
Resistenza LB BSA 0.56
valori di interesse
Interpolazione lineare
nei valori di interesse

112
Figura 5.28 Resistenza dei distretti inferiori associata a BSA di 0.74 m2.
Dal confronto tra i valori di resistenza ricercati e quelli ottenuti sperimentalmente, la linearità
dei campioni porosi può essere confermata. L’errore percentuale massimo ottenuto in questo
caso è infatti del 6.7%.
5.2.3 Progettazione dell’alloggiamento per gli elementi resistivi
L’alloggiamento degli elementi resistivi utilizzato nel lavoro di Parabiaghi e Vicario è stato
identificato come un possibile punto debole del circuito a causa delle perdite di carico, e
quindi si è cercato di trovare una soluzione costruttiva che fosse in grado di migliorarlo.
Infatti, come mostrato in Figura 5.29, la zona in cui si ha il brusco cambiamento di direzione
e di diametro è causa di perdite di pressione limitabili ottimizzando il design.
y = 75,397x - 28,069
R² = 0,9846
0
20
40
60
80
100
120
140
160
180
200
0 0,5 1 1,5 2 2,5 3
ΔP
me
dia
[m
mH
g]
Q [l/min]
Resistenza distretti inferiori - BSA 0.74
Resistenza LB per BSA
0.74
Resistena LB BSA 0.74
valori di interesse
Interpolazione lineare
nei valori di interesse

113
Figura 5.29 Rappresentazione CAD di una resistenza variabile con mezzo poroso.
Per garantire il movimento assiale della barra e allo stesso tempo eliminare la perdita di
carico non lineare è stata pensata la soluzione progettuale mostrata in Figura 5.30. Sfruttando
l’accoppiamento di cinque diversi componenti e la loro rotazione manuale, viene garantito
il movimento della barra, vincolata a due supporti. Essi sono incastrati nei tre tubi centrali,
creando un unico elemento mobile. La tenuta idraulica viene garantita grazie a sei o-ring.
L’avanzamento della barra viene reso possibile afferrando l’elemento centrale con la mano,
e applicando un movimento traslatorio nel verso di avanzamento desiderato. Tutto
l’elemento è collegato al circuito tramite due connettori da ½”, che sono incastrati nei tubi
esterni. Questi ultimi vengono fissati ad un sistema di riferimento solidale al tavolo di
appoggio.

114
Figura 5.30 Rappresentazione esplosa CAD della prima soluzione progettuale dell'elemento resistivo. Connettore da ½”
(1); Tubo esterno da 34 mm di diametro interno (2); Mezzo poroso (3); Tubo centrale da 42 mm di diametro interno(4);
Supporto (5); barra (6).
Per scegliere la geometria dell’area di passaggio dei supporti sono state ipotizzate diverse
soluzioni come mostrato in Figura 5.31. Considerando che l’area utile è un cerchio con
diametro di 42 mm, le dimensioni dei fori sono state scelte in modo da garantire la più grande
area di passaggio, mantenendo allo stesso tempo l’integrità del supporto.
La prima configurazione presenta quattro fori con diametro di 11 mm, allineati su due assi
perpendicolari passanti per il centro dell’area utile. La seconda ha quattro fori con diametro
di 9 mm, allineati come nella geometria precedente, quattro fori con diametro di 5 mm e altri
quattro con diametro di 4 mm. L’ultima soluzione ha tre sezioni di corona circolare con
diametro esterno pari a 34 mm, diametro interno di 24 mm e grandezza angolare di 100°.
Le dimensioni dei fori sono state ottenute in modo da avere area passante confrontabile, pari
a 380, 383 e 379 mm2 rispettivamente.

115
Figura 5.31 Rappresentazione CAD dell'area di passaggio sulla superficie dei supporti.
Per scegliere quale delle tre geometrie utilizzare, si è calcolato il numero di Reynold
attraverso il foro più limitante, per verificare che il flusso fosse laminare (Re < 2300). Il
calcolo non viene effettuato per il foro centrale del supporto, in quanto come riportato in
Figura 5.30 esso è occupato dalla barra.
�� = � ∙ ∙ Pμ 15.
Dove
• ρ è la densità del fluido [kg/m3];
• v è la velocità del fluido [m/s];
• D è il lunghezza caratteristica [m];
• µ è la viscosità del fluido [Pa∙s].
Per condotti o fori circolari la lunghezza caratteristica corrisponde al diametro, altrimenti
viene calcolato con la seguente formula:
P = 4 ∙ �? 16.
Dove
• S è la sezione del foro [m2];
• l è il perimetro del foro [m].

116
Il numero di Reynolds che si ottiene per le tre geometrie è rispettivamente 2314, 6366 e
1319. Siccome i primi due valori sono associati ad un moto di transizione e ad un moto
turbolento, la scelta della terza geometria è stata immediata.
Una successiva analisi CFD con software COMSOL Multiphysics 5.2 (COMSOL Inc.), ha
mostrato che le perdite di pressione a cavallo dei supporti erano maggiori di quelle indotte
dalla brusca riduzione di diametro e dal cambiamento di direzione del flusso. La
motivazione era da ricondurre sia alla presenza della resistenza offerta dai supporti che
dalla lunghezza dell’elemento resistivo.
Questa soluzione costruttiva è quindi stata scartata ed è stato rimosso uno dei supporti.
Per ridurre ulteriormente le perdite di carico è stata ridotta la lunghezza dell’elemento
resistivo. Ciò è stato possibile poiché si è deciso di ridurre il diametro esterno dei mezzi
porosi, permettendo, quindi, di ottenere la resistenza richiesta con una lunghezza minore.
Utilizzando un tubo interno con diametro 20 mm e spessore di 2 mm, vengono ridotte di
conseguenza anche le dimensioni dei supporti. Considerando la configurazione meno
resistente e massimizzando l’area di passaggio, nonostante il notevole accorciamento
dell’elemento resistente, le cadute di pressione misurate ai capi rimangono maggiori della
soluzione tecnica originale.
La soluzione tecnica finale, è stata trovata cambiando il modo di operare della resistenza.
Anziché utilizzare dei supporti per reggere la barra, si è scelto di utilizzare una barra
trasversale come mostrato in Figura 5.32. Quest’ultima viene vincolata ad un tubo esterno
grazie a due fori diametralmente opposti, di opportune dimensioni. L’inserimento della
barra all’interno del mezzo poroso è ottenuto traslando il tubo esterno su quello interno, il
che è permesso dalla presenza di due scanalature diametralmente opposte su
quest’ultimo. La tenuta idraulica viene garantita dalla presenza di due o ring posti, sul tubo
interno, alle estremità della scanalatura e da altri due posizionati all’estremità della barra
trasversale.

117
Figura 5.32 Rappresentazione CAD dell'elemento resistente con soluzione traslante. Connettore da ½“(1); Tubo con
diametro 20 mm (2); Mezzo poroso (3); Tubo con diametro 26 mm (4); Barra (5); Barra di supporto (6).
Compliance
La costruzione di un banco prova prevede l’utilizzo di diversi componenti necessari a
simulare le molteplici proprietà dei vasi sanguigni. Oltre agli elementi resistivi, infatti,
devono essere progettati elementi complianti in grado di rappresentare la variazione di
volume subita dai condotti al variare delle pressioni interne.
La progettazione di questi elementi deve attenersi a particolari specifiche di progetto che ne
garantiscono la validità durante l’utilizzo.
In particolare essi devono essere di ingombro ridotto, di semplice utilizzo e di facile
regolazione.
5.3.1 Stato dell’arte delle compliance
Di seguito vengono illustrate le soluzioni tecniche più utilizzate trovate in letteratura.
Cassa a pelo libero (Figura 5.33).
Figura 5.33 Cassa a pelo libero.

118
La compliance è data dal rapporto tra la variazione di volume del liquido immesso nel
recipiente e la variazione della pressione che si registra alla base della cassa, legata al
battente idraulico.
La pressione alla base del recipiente può essere calcolata tramite l’equazione:
[ = � ∙ \ ∙ ℎ 17.
dove:
• ρ è la densità del fluido [kg/m3];
• g è l’accelerazione gravitazionale [m/s2];
• h è l’altezza del livello d’acqua [m].
Moltiplicando ambi i membri per l’area della cassa e differenziando si ottiene:
� ∙ ∆� = � ∙ � ∙ \ ∙ ∆ℎ 18.
Sapendo che
� ∙ ∆ℎ = ∆ 19.
si ottiene che
� ∙ ∆� = � ∙ \ ∙ ∆ 20.
da cui è possibile ricavare il valore di compliance.
C = ∆V∆P = Aρg ; 21.
dove:
• C è la compliance del dispositivo [m3/Pa];
• ∆ è la variazione infinitesima di volume [m3];
• ∆� è la variazione infinitesima di pressione [Pa];

119
Come evidenziato dall’equazione 21 la compliance del dispositivo dipende da diversi fattori
tra cui la sezione trasversale della cassa. Per ottenere diversi valori di compliance è possibile
ridurre discretamente questa sezione introducendo cilindri pieni di diametri crescenti. In
questo modo la cassa costruita può essere considerata come regolabile.
Cassa chiusa con molla (Figura 5.34).
Figura 5.34 Cassa chiusa con molla.
La presenza di fluido all’interno della cassa genera una pressione che si traduce in uno
spostamento della molla.
Sulla piastra posta sotto la molla agiscono due forze uguali e contrarie in condizioni di
equilibrio: la forza della molla verso il basso e quella del liquido verso l’alto.
Il bilancio di forze può essere analizzato come segue:
R ∙ cF d FGe = [ ∙ � 22.
dove:
• k è la costante elastica della molla [N/min];
• x è la posizione del piatto quando la molla è deformata [m];
• x0 è la posizione del piatto quando la molla è in equilibrio [m];
• p è la pressione del liquido [Pa];
• A è l’area della cassa [m2].
moltiplicando ambi i membri per l’area della cassa e differenziando si ottiene:
� ∙ Y ∙ fF = f[ ∙ � 23.

120
Dunque
R ∙ ∆ = �W ∙ ∆� 24.
da cui è possibile ricavare il valore della compliance:
C = ∆V∆P = AWR ; 25.
dove:
• C è compliance del dispositivo [m3/Pa];
• ∆ è la variazione infinitesima di volume [m3];
• ∆� è la variazione infinitesima della pressione [Pa];
• � è l’area della cassa con molla [m2];
• k è la costante elastica della molla [N/m].
In quanto cassa chiusa, per variare il valore di compliance del sistema è necessaria la
sostituzione della molla con un’altra di rigidezza differente. Tale operazione risulta
difficoltosa e per questo motivo la soluzione descritta viene usata raramente nella
costruzione di circuiti.
Cassa d’aria chiusa (Figura 5.35).
Figura 5.35 Cassa d'aria chiusa.
All’interno della cassa d’aria viene introdotta una quantità di gas nota tale da indurre una
variazione di pressione iniziale. La quantità di gas introdotta è complementare alla quantità

121
di fluido. È possibile considerare la pressione del gas costante nel volume e uguale a quella
nel fluido, per il quale si trascura il battente idraulico agente alla base della cassa d’aria.
L’equazione sotto riportata descrive le diverse trasformazioni politropiche che possono
avvenire all’interno della cassa. Esse differiscono a seconda dell’indice kp (Tabella 5.7).
p ∙ Vgh = cost 26.
dove: • p è la pressione rilevata nel sistema [Pa];
• V è il volume della cassa chiusa [m3];
• kp è un coefficiente caratteristico della trasformazione che si sviluppa nel
dispositivo.
Tabella 5.7 Coefficienti caratteristici per le diverse trasformazioni termodinamiche; Cp rappresenta il calore specifico a
pressione costante; Cv rappresenta il calore specifico a volume costante.
Trasformazione Kp
Isobara 0
Isoterma 1
Isocora ±∞
adiabatica jhjk
A partire dall’equazione 26, si ottiene il valore di compliance caratteristico di tale
dispositivo.
C = δVδP = VmnoG ∙ pGp qrs ∙ pKp qrs Kp
ku ; 27.
dove:
• C è compliance del dispositivo [m3/Pa];
• f è la variazione infinitesima di volume [m3];
• f� è la variazione infinitesima della pressione [Pa];
• vwxG è il volume iniziale del gas [m3];

122
• p0 è la pressione iniziale del gas [Pa];
• kp è il coefficiente caratteristico della trasformazione;
• p è il valore pressorio al termine della trasformazione [Pa].
Per rendere regolabile questo dispositivo è possibile variare le condizioni iniziali di
pressione e volume (p0 e VmnoG). Modificandole opportunamente è possibile, infatti, variare
in maniera continua il valore di compliance. A tale scopo si può utilizzare una siringa per
aumentare p0 o una valvola di sfogo per diminuirla.
Inoltre, è bene considerare come anche la pressione a fine trasformazione possa influenzare
il comportamento del sistema. Aumentandola, infatti, il sistema si irrigidisce diventando
meno compliante. Tale comportamento rispecchia quello vascolare fisiologico.
In conclusione la cassa d’aria risulta facilmente regolabile, di semplice utilizzo e di
ingombro ridotto, quindi utilizzabile anche come compliance arteriosa.
5.3.2 Dimensionamento e progettazione degli elementi complianti
Nella costruzione del banco prova si è scelto di utilizzare, come elementi complianti, casse
d’aria chiuse per i vantaggi elencati nel paragrafo precedente.
Per utilizzare questi dispositivi è necessario inserire al loro interno del liquido in modo da
portare il gas alla pressione di utilizzo o pressione di esercizio. Attorno a questo valore la
pressione oscilla a causa della portata pulsatile. Il riempimento della cassa avviene in
condizioni quasi statiche per via della lentezza con cui viene inserito il fluido; in questo
modo è possibile considerare la compressione subita dal gas come una trasformazione
isoterma.
Per quanto riguarda le oscillazioni attorno alla pressione di esercizio, esse, invece,
avvengono in tempi rapidi, tali da poter considerare trascurabili i flussi di calore tra gas e
ambiente in fase di compressione ed espansione del fluido. In questa fase è possibile quindi
assumere che la trasformazione del gas sia una trasformazione adiabatica. Nell’intervallo di
pressione e temperatura in cui si lavora nelle applicazioni bioingegneristiche si può
ragionevolmente approssimare l’aria ad un gas ideale.
Tenendo conto di queste assunzioni, per poter dimensionare le casse d’aria, bisogna
considerare che la trasformazione isoterma per un gas perfetto è descritta dall’equazione:

123
�y y = �G G 28.
dove il pedice “e” indica le condizioni di esercizio mentre il pedice “0” le condizioni iniziali
del gas.
Per quanto riguarda la trasformazione adiabatica che avviene nell’intorno della pressione di
esercizio, essa può essere descritta dall’equazione:
� q = �y yq 29.
dove il coefficiente caratteristico della trasformazione adiabatica k assume il valore di 1.4.
Esplicitando quest’ultima equazione in funzione del volume e derivandola rispetto alla
pressione si ottiene l’equazione seguente.
� = z{z| = d pq �yp/q y�cKpKqe/q 30.
Poiché le oscillazioni di pressione nell’intorno della pressione di esercizio risultano essere
molto piccole è possibile porre P = Pe. Nella progettazione delle casse d’aria si può dunque
considerare che l’isoterma venga usata per spostarsi dalla pressione iniziale (pressione
atmosferica) a quella di esercizio mentre l’adiabatica avvenga nell’intorno di quest’ultima.
Per poter dimensionare le casse d’aria, sono stati considerati innanzitutto i valori di
compliance da simulare. Essi sono riportati in Tabella 5.8, divisi tra i vari distretti e in base
alle diverse BSA.
Tabella 5.8 Valori di Compliance per i vari distretti per le BSA di interesse.
BSA 0.56 m2 BSA 0.67 m2 BSA 0.74 m2
Caorta [ml/mmHg] 0.2 0.3 0.3
CLB [ml/mmHg] 3.6 4.9 5.9
CUb [ml/mmHg] 1.6 1.7 1.8
Cpolmoni [ml/mmHg]
0.5 0.6 0.6
Per poter utilizzare le equazioni politropiche riportate precedentemente, è stata calcolata la
pressione di esercizio di ogni distretto, mediando la pressione massima con la pressione

124
minima. Questi valori sono stati rilevati dai grafici, ottenuti tramite le simulazioni in
Simulink, riportati nel paragrafo 4.4.
A questo punto è stato calcolato il volume di esercizio del gas (Ve) e il volume iniziale di
gas (V0), corrispondente al volume della cassa, adattando le equazioni 21 e 22 alle incognite
ricercate:
y = � ∗ Y~�yKp G = y ∗ �y�G 31.
Una volta ottenuti questi parametri è stato possibile calcolare il volume di esercizio del
liquido sottraendo a V0 il volume di esercizio del gas.
In Tabella 5.9 sono riportati i valori di pressioni e i volumi utili al dimensionamento delle
casse.
Tabella 5.9 Valori di pressione e volume calcolati.
BSA 0.56 m2
Compliance [ml/mmHg]
P esercizio assoluta[mmHg]
V esercizio gas [ml]
V0 gas (Vcassa) [ml]
Vacqua [ml]
Aorta 0.2 815.9 269.2 288.9 19.8
LB 3.6 765.3 3844.5 3871.2 26.7
Ub 1.6 769.3 1687.4 1708 20.6
Polmoni 0.5 765.6 494.1 497.7 3.7
BSA 0.67
m2
Aorta 0.3 809.2 331.1 352.5 21.5
LB 4.9 765.4 5280.3 5317.4 37.2
Ub 1.7 768.4 1840.6 1861 20.3
Polmoni 0.6 765.5 612.6 617 4.4
BSA 0.74 m2
Aorta 0.3 806 371.5 394.0 22.5
LB 5.9 767.9 6352 6418.4 66.4
Ub 1.8 765.2 1926.5 1939.8 13.3
Polmoni 0.6 765.4 690.1 695.1 4.9
Le dimensioni delle casse sono state scelte in base alla disponibilità dei tubi presenti in
laboratorio e in modo tale che il livello d’acqua in condizioni di esercizio non fosse minore
a 3 cm. Con un livello d’acqua molto basso infatti, durante lo svolgimento delle prove, si
correrebbe il rischio di aspirazione e/o di immissione di aria all’interno del circuito. Per
ovviare questo problema le casse sono state dimensionate in modo da poter contenere più

125
volume di quello desiderato e il volume extra è stato riempito d’acqua in modo da non
influire sul valore di compliance.
Sono state costruite le casse d’aria per i distretti associati alla BSA da 0.56 m2 e in seguito
dei volumi aggiuntivi da collegare ad esse tramite tubi da 3/16”, utili ad aumentare la loro
capacità e ottenere i volumi necessari per simulare la compliance dei distretti delle BSA di
0.67 e 0.74 m2.
In Figura 5.36 viene mostrata, a titolo esemplificativo, la cassa d’aria utilizzata per ottenere
la compliance dei distretti superiori della BSA da 0.56 m2 collegata al volume aggiuntivo
necessario per avere un sistema che possa simulare la compliance dei distretti superiori per
BSA 0.67 m2.
Figura 5.36 Cassa d'aria usata da sola per simulare la compliance dei distretti superiori per BSA 0.56 m2 (destra),
collegata ad un volume aggiuntivo per simulare la compliance dei distretti superiori per BSA 0.67 m2 (sinistra).
5.3.3 Caratterizzazione casse d’aria
Una volta realizzate, tutte le casse d’aria sono state caratterizzate in modo da verificare che
la compliance ottenuta sperimentalmente corrispondesse con quella teorica.
Per la caratterizzazione è stato allestito il set up sperimentale mostrato in Figura 5.37.

126
Figura 5.37 Set up sperimentale. 1. Cassa d'aria da testare; 2. Trasduttore di pressione; 3. Siringa; 4. Pompetta.
Il protocollo di prova utilizzato è descritto nei punti seguenti.
1. Inserimento del volume di liquido. Mantenendo aperti i rubinetti Luer presenti sul
coperchio della cassa, viene inserito all’interno il volume di acqua necessario per
ottenere un volume d’aria pari a V0.
2. Calibrazione del trasduttore di pressione. Un trasduttore di pressione viene calibrato
tramite l’utilizzo di un manometro a mercurio e avvitato su uno dei rubinetti Luer. Il
valore di pressione rilevato deve essere pari a quello della pressione atmosferica (p0).
3. Chiusura del rubinetto che permette la comunicazione tra l’aria presente all’interno
della cassa e quella esterna.
4. Inserimento di un volume prestabilito di liquido. Attraverso l’uso di una siringa si
inserisce all’interno della cassa, senza far uscire aria, un volume prestabilito di
liquido (solitamente 5 ml).
5. Rilevamento del valore di pressione interno alla cassa.
I punti 4 e 5 del protocollo di prova sono stati ripetuti dieci volte fino al raggiungimento del
volume di esercizio desiderato e, una volta finita la parte sperimentale, ad essa è seguita la
rielaborazione dei dati ottenuti.
È bene notare che tutto il protocollo di prova è stato eseguito almeno due volte per accertarsi
che i valori di pressione rilevati fossero affidabili.
Durante la rielaborazione dei dati si è calcolata la pressione di esercizio del gas con
l’equazione propria della trasformazione isoterma (28).
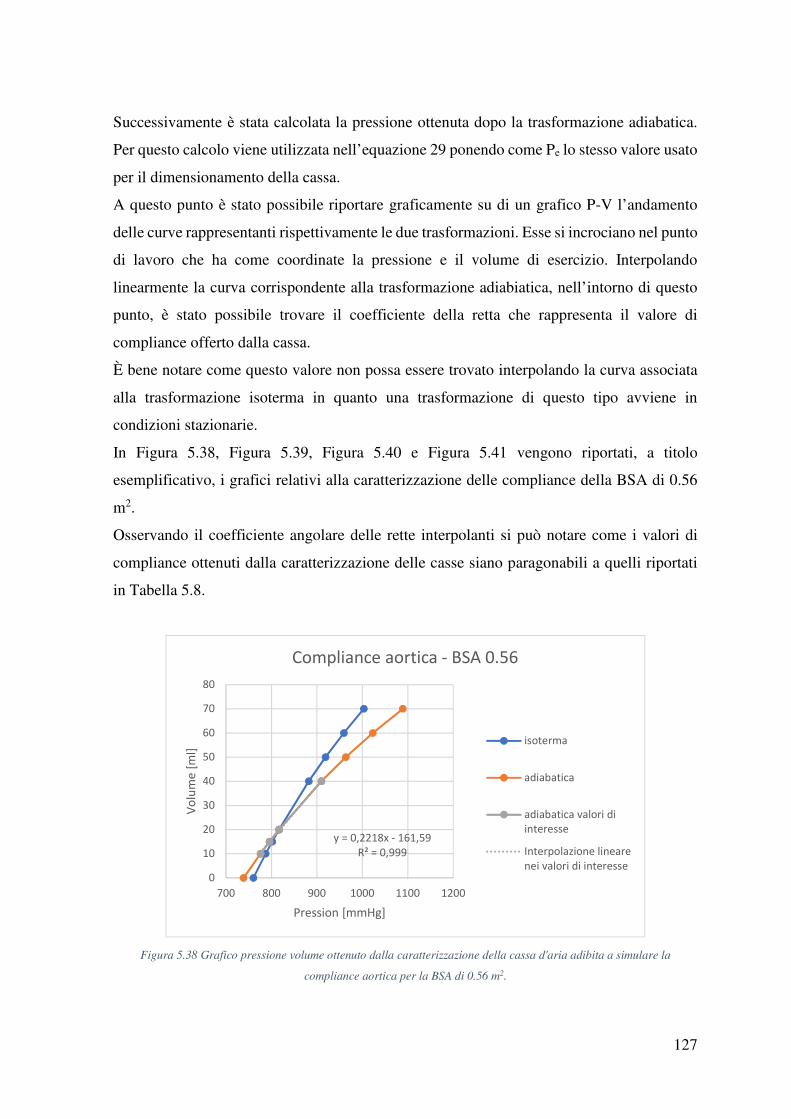
127
Successivamente è stata calcolata la pressione ottenuta dopo la trasformazione adiabatica.
Per questo calcolo viene utilizzata nell’equazione 29 ponendo come Pe lo stesso valore usato
per il dimensionamento della cassa.
A questo punto è stato possibile riportare graficamente su di un grafico P-V l’andamento
delle curve rappresentanti rispettivamente le due trasformazioni. Esse si incrociano nel punto
di lavoro che ha come coordinate la pressione e il volume di esercizio. Interpolando
linearmente la curva corrispondente alla trasformazione adiabiatica, nell’intorno di questo
punto, è stato possibile trovare il coefficiente della retta che rappresenta il valore di
compliance offerto dalla cassa.
È bene notare come questo valore non possa essere trovato interpolando la curva associata
alla trasformazione isoterma in quanto una trasformazione di questo tipo avviene in
condizioni stazionarie.
In Figura 5.38, Figura 5.39, Figura 5.40 e Figura 5.41 vengono riportati, a titolo
esemplificativo, i grafici relativi alla caratterizzazione delle compliance della BSA di 0.56
m2.
Osservando il coefficiente angolare delle rette interpolanti si può notare come i valori di
compliance ottenuti dalla caratterizzazione delle casse siano paragonabili a quelli riportati
in Tabella 5.8.
Figura 5.38 Grafico pressione volume ottenuto dalla caratterizzazione della cassa d'aria adibita a simulare la
compliance aortica per la BSA di 0.56 m2.
y = 0,2218x - 161,59
R² = 0,999
0
10
20
30
40
50
60
70
80
700 800 900 1000 1100 1200
Vo
lum
e [
ml]
Pression [mmHg]
Compliance aortica - BSA 0.56
isoterma
adiabatica
adiabatica valori di
interesse
Interpolazione lineare
nei valori di interesse

128
Figura 5.39 Grafico pressione volume ottenuto dalla caratterizzazione della cassa d'aria adibita a simulare la
compliance polmonare per la BSA di 0.56 m2.
Figura 5.40 Grafico pressione volume ottenuto dalla caratterizzazione della cassa d'aria adibita a simulare la
compliance dei distretti inferiori per la BSA di 0.56 m2.
y = 0,4534x - 343,39
R² = 0,9999
0
5
10
15
20
25
30
35
40
740 760 780 800 820 840 860
Vo
lum
e [
ml]
Pressione [mmHg]
Compliance distretti polmonari - BSA 0.56
isoterma
adiabatica
adiabatica valori di
interesse
Interpolazione lineare
nei distretti di interesse
y = 3,5719x - 2706,5
R² = 1
0
20
40
60
80
100
120
750 760 770 780 790
Vo
lum
e a
cqu
a [
ml]
pressione [mmHg]
Compliance distretti inferiori - BSA 0.56
isoterma
adiabatica
adiabatica valori di
interesse
Interpolazione lineare
nei valori di interesse

129
Figura 5.41 Grafico pressione volume ottenuto dalla caratterizzazione della cassa d'aria adibita a simulare la
compliance dei distretti superiori per la BSA di 0.56 m2.
y = 1,5547x - 1175,5
R² = 0,9999
0
20
40
60
80
100
120
140
160
750 800 850 900
Vo
lum
e [
ml]
Pressione [mmHg]
Compliance distretti superiori - BSA 0.56
isoterma
adiabaica
adiabatica valori di
interesse
Interpolazione lineare
nei valori di interesse

130
Inertanza
Per la corretta simulazione dei distretti corporei è necessario introdurre nel banco prova,
oltre a resistenze e compliance, anche le inerzie del fluido. Per riprodurre queste ultime non
vengono progettati elementi appositi ma viene scelta la dimensione dei tubi di collegamento
del circuito.
Essi infatti, in base alla loro lunghezza permettono di simulare l’inerzia specifica che il fluido
accumula nel muoversi attraverso i vasi sanguigni.
Il valore di inertanza può essere calcolato attraverso la formula seguente:
� = � ?� 32.
Dove:
• L è l’inertanza [kg/m4];
• ρ è la densità del fluido [kg/m3];
• l è la lunghezza del condotto [m];
• A è la sezione trasversale del condotto [m2].
La lunghezza dei tubi è stata calcolata invertendo la formula poiché il valore di inertanza dei
vari distretti viene ricavato dal modello a parametri concentrati (Capitolo 4). Questo
dimensionamento tuttavia non è stato seguito nella costruzione del circuito. La lunghezza
dei tubi infatti sarebbe risultata troppo corta per collegare gli elementi del banco prova. Si è
quindi deciso di utilizzare tubi da ½” di lunghezza variabile a seconda dei componenti da
collegare, evitando eccessivo ingombro, ma permettendo al flusso di liquido di svilupparsi
correttamente tra un elemento e l’altro.

131
Sistema di attuazione
In questo lavoro di tesi, per simulare la funzione del ventricolo unico, si è scelto di utilizzare
i VAD ad azionamento pneumatico. In laboratorio erano presenti due dispositivi di
assistenza ventricolare, una da 10 ml e l’altro da 25 ml (Berlin Heart, EXCOR). Non
disponendo di nessuna delle stazioni apposite per il loro funzionamento, è stato creato un
circuito pneumatico comandato da scheda Arduino, progettato e assemblato ad hoc.
Circuito pneumatico
Il circuito pneumatico utilizzato è composto da sette elementi necessari a controllare la
pressione fornita dalla linea dell'aria compressa. A partire dal compressore, il flusso d'aria
procede verso il circuito. Il primo elemento di controllo è un filtro regolatore (AW20-
F01BG-A, SMC Corporation, Tokyo) necessario per rimuovere le particelle solide in
sospensione, come le polveri, al fine di preservare l'integrità e il corretto funzionamento della
membrana elastica del VAD. In seguito, la linea si divide in due rami, uno usato per il
controllo del singolo ventricolo e l’altro, usato nel caso si voglia esaminare il contributo dato
da un dispositivo di assistenza ventricolare All’inizio di ciascun ramo vi è una valvola ad
azionamento meccanico (EVM430-F01-34R, SMC Corporation, Tokyo) necessaria per
interrompere il flusso verso uno di essi.
I due rami sono composti dagli stessi elementi; per questo motivo di seguito ne viene
descritto uno. Proseguendo dalla valvola verso il VAD, il percorso dell’aria viene diramato
in due ulteriori linee: una per il controllo della sistole e una per il controllo della diastole.
Nella linea di sistole, vi è un regolatore (AR25-F02BM-1-A, SMC Corporation, Tokyo) in
grado di controllare la pressione in uscita verso il VAD. Nella linea di diastole, oltre ad
esserci un regolatore identico a quello presente nella linea di sistole, è presente una valvola
a 2 vie (VDW20QA, SMC Corporation, Tokyo) e un eiettore di vuoto (ZH05BS-01-01, SMC
Corporation, Tokyo) in grado di generare pressioni negative.
Le due linee si uniscono in una valvola a 3 vie (VDW350-5G-4-01F-Q, SMC Corporation,
Tokyo) necessaria per controllare l’apertura alternata di una di esse. La valvola a 3 vie, che
presenta lo schema mostrato in Figura 5.42, è stata montata in modo da collegare l’ingresso
IN con la linea di uscita (linea che collega il circuito al VAD), l’ingresso 2 con la linea di
sistole e l’ingresso 3 con la linea di diastole.

132
Figura 5.42 Schema di funzionamento dell'elettrovalvola a 3 vie.
Il circuito, dunque, avendo la linea di diastole bloccata dalla valvola a 2 vie, che è
normalmente chiusa, e la linea di sistole bloccata dalla valvola a 3 vie, anch’essa
normalmente chiusa per via della scelta del suo posizionamento, si presenta chiuso fintanto
che le valvole non ricevono un segnale dal sistema di controllo.
Viene inoltre inserito un trasduttore di pressione di seguito alla valvola a 3 vie per controllare
l’onda pressoria generata. In Figura 5.43 viene mostrato l’intero sistema di attuazione.
Figura 5.43 Rappresentazione della linea pneumatica per il controllo del VAD. (1) Linea dell’aria compressa. (2) Filtro
regolatore. (3) Valvola ad azionamento meccanico. (4) Regolatore di pressione. (5) Elettrovalvola a 2 vie. (6) Eiettore di
vuoto. (7) Elettrovalvola a 3 vie. (8) Sistema di controllo. (9) VAD.
5.5.1 Sistema di controllo
Per comandare l’apertura e la chiusura delle elettrovalvole è stato necessario progettare il
sistema di controllo. Si è scelto di utilizzare un controllore facilmente disponibile in
commercio, programmabile e con costi contenuti.

133
Per il corretto funzionamento del ventricolo, è necessario fornire le pressioni corrette insieme
alla frequenza cardiaca. Dunque il controllo si basa sull’immissione da parte dell’utente del
valore di frequenza cardiaca e della percentuale di durata della sistole rispetto alla durata
totale di un battito.
Circuito elettrico
La strumentazione elettronica consiste in un microcontrollore Arduino (ARDUINO MEGA
2560, Arduino LLC, Ivrea), una breadboard con 830 punti, un display industriale a 16
caratteri divisi in 2 righe (1602A QAPASS) compatibile con il driver Hitachi HD44780 e un
tastierino a membrana a 12 tasti.
La scheda Arduino a disposizione è basata sul microcontrollore ATMega2560, in grado di
memorizzare fino a 256 KB di istruzioni sulla memoria flash integrata, che ne permette
l’utilizzo indipendente da un computer una volta programmato. Esso viene generalmente
alimentato a 5 V da un alimentatore esterno connesso alla rete elettrica, ma è in grado di
fornire fino ad un massimo di 12 V se viene utilizzato un alimentatore di pari voltaggio. Per
il controllo delle elettrovalvole è stato necessario utilizzare un ulteriore alimentatore a 24 V
(LPV-35-24, Mean Well Enterprice Co., Taiwan).
I collegamenti tra breadboard e hardware sono stati effettuati tramite jumper in dotazione,
quando possibile, altrimenti utilizzando cavo 22AWG opportunamente sezionato.
La breadboard utilizzata contiene 63 x 2 file da 5 pin centrali, utili per collegare i
componenti, e 10 gruppi da 10 fori ciascuno disposti su entrambi i lati lunghi, utilizzati per
l’alimentazione e la massa, come mostrato in Figura 5.44. I collegamenti elettrici all’interno
della breadboard sono per colonna nella zona centrale, e per fila nella zona laterale (Figura
5.44).
Figura 5.44 Disposizione dei pin e visualizzazione dei collegamenti interni.
La scheda Arduino (Figura 5.45), è stata collegata tramite i pin 5 V e GND rispettivamente
alla penultima e ultima fila della breadboard, fissando l’alimentazione di metà di essa a 5 V.

134
L’altra metà della breadboard è stata alimentata con il generatore a 24 V, collegando il
morsetto positivo e il morsetto negativo con l’ultima e la penultima fila rispettivamente.
Figura 5.45 Scheda Arduino Mega 2560.
Una volta alimentata la breadboard, il display (Figura 5.46) è stato collegato tramite i pin
presenti,
Figura 5.46 Disposizione pin digitali del display.
Seguendo lo schema riportato in Figura 5.47 ottenuto tramite il programma open-source
Fritzing (versione 0.9.3b, Interaction Design Lab Potsdam) si possono vedere i collegamenti
dei componenti.

135
Figura 5.47 Disposizione del circuito del sistema di controllo.
Si è inoltre inserito un trimmer da 10 KΩ, collegato al pin VE del display, per agevolarne la
regolazione del contrasto. Questo componente è in grado di fornire una resistenza variabile
da 0 ohm al valore massimo per cui è stato costruito. La regolazione avviene inserendo un
cacciavite a stella nell’apposito foro, il quale agisce da cursore modificando il valore della
resistenza interna.
Il tastierino utilizzato, anch’esso di facile reperibilità, è stato collegato, tramite i suoi 7 pin
di output, ai pin sulla scheda Arduino come mostrato in Figura 5.47. Esso è composto da una
matrice di pulsanti disposti in 4 righe e 3 colonne, collegati elettricamente (Figura 5.48).
Figura 5.48 Disposizione collegamento righe e colonne del tastierino numerico.
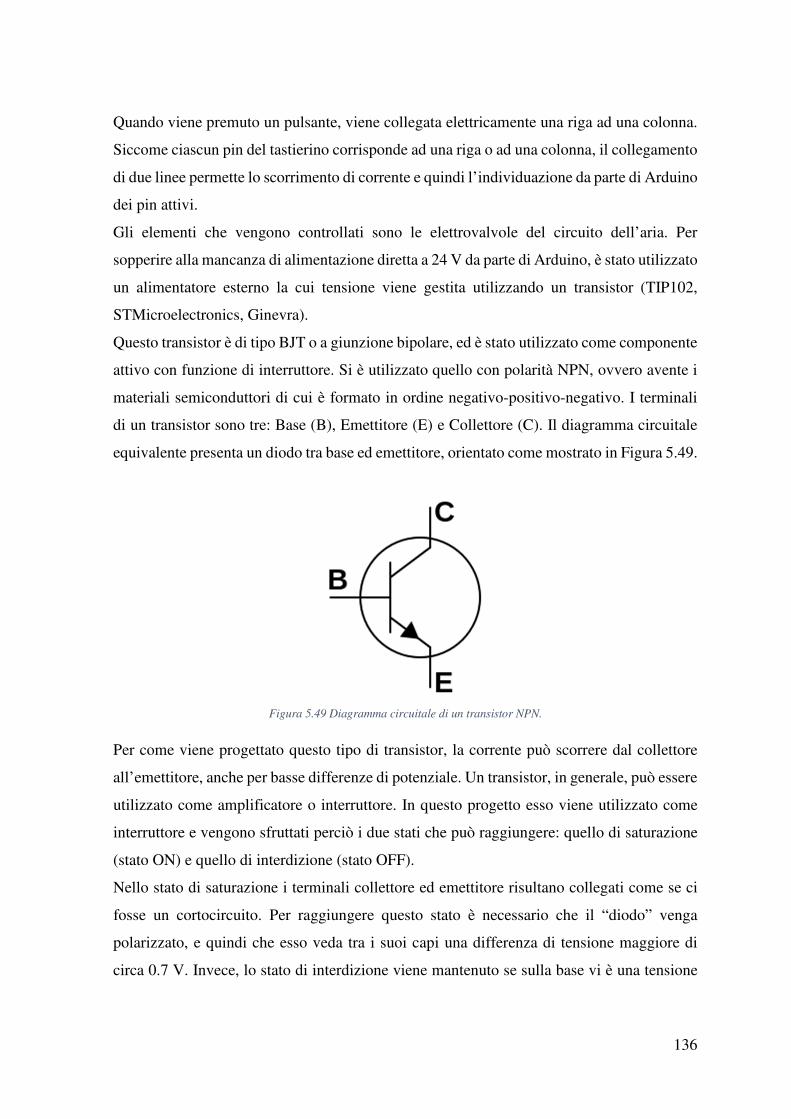
136
Quando viene premuto un pulsante, viene collegata elettricamente una riga ad una colonna.
Siccome ciascun pin del tastierino corrisponde ad una riga o ad una colonna, il collegamento
di due linee permette lo scorrimento di corrente e quindi l’individuazione da parte di Arduino
dei pin attivi.
Gli elementi che vengono controllati sono le elettrovalvole del circuito dell’aria. Per
sopperire alla mancanza di alimentazione diretta a 24 V da parte di Arduino, è stato utilizzato
un alimentatore esterno la cui tensione viene gestita utilizzando un transistor (TIP102,
STMicroelectronics, Ginevra).
Questo transistor è di tipo BJT o a giunzione bipolare, ed è stato utilizzato come componente
attivo con funzione di interruttore. Si è utilizzato quello con polarità NPN, ovvero avente i
materiali semiconduttori di cui è formato in ordine negativo-positivo-negativo. I terminali
di un transistor sono tre: Base (B), Emettitore (E) e Collettore (C). Il diagramma circuitale
equivalente presenta un diodo tra base ed emettitore, orientato come mostrato in Figura 5.49.
Figura 5.49 Diagramma circuitale di un transistor NPN.
Per come viene progettato questo tipo di transistor, la corrente può scorrere dal collettore
all’emettitore, anche per basse differenze di potenziale. Un transistor, in generale, può essere
utilizzato come amplificatore o interruttore. In questo progetto esso viene utilizzato come
interruttore e vengono sfruttati perciò i due stati che può raggiungere: quello di saturazione
(stato ON) e quello di interdizione (stato OFF).
Nello stato di saturazione i terminali collettore ed emettitore risultano collegati come se ci
fosse un cortocircuito. Per raggiungere questo stato è necessario che il “diodo” venga
polarizzato, e quindi che esso veda tra i suoi capi una differenza di tensione maggiore di
circa 0.7 V. Invece, lo stato di interdizione viene mantenuto se sulla base vi è una tensione

137
inferiore a quella presente sul collettore e sull’emettitore. In questo caso il diodo si comporta
come circuito aperto, non permettendo il passaggio di corrente.
Nel circuito, viene inoltre inserita una resistenza da 15 kΩ in serie alla base per proteggere
il transistor da eccessive correnti in ingresso che potrebbero danneggiarlo.
In particolar modo, il transistor utilizzato, è in configurazione Darlington, quindi composto
da due BJT in cascata, e presenta due diodi orientati come in Figura 5.50, i quali permettono
il passaggio di corrente solo dalla base all’emettitore.
Figura 5.50 Diagramma circuitale del transistor Darlington.
L’ultimo componente che è stato utilizzato per la gestione della tensione e corrente in
ingresso alle elettrovalvole, è un diodo di potenza con il catodo orientato come mostrato in
Figura 5.47. Esso è necessario per proteggere le elettrovalvole da correnti retrograde quando
il transistor si trova nella condizione di interdizione.
Infine è stato inserito nel circuito un tasto per agevolare il RESET della scheda Arduino. Vi
è un tasto reset integrato sulla scheda, ma per necessità ne è stato aggiunto uno a pannello in
modo che esso possa essere facilmente raggiungibile dall’utente.
Programmazione
Per interfacciare i componenti hardware con il controllore è stato necessario programmare
quest’ultimo.
Si è collegata la scheda Arduino al PC tramite cavo USB all’ingresso integrato su di essa.
Utilizzando poi il software open-source Arduino IDE (ver. 1.8.3) è stato possibile scrivere
le istruzioni in linguaggio Java da compilare e caricare sulla memoria.
Il codice utilizzato per controllare le elettrovalvole, riportato in appendice A, è diviso in 3
sezioni: la prima, in cui vengono caricate le librerie necessarie per utilizzare il display e il
tastierino, e in cui si inizializzano questi ultimi; la seconda, che corrisponde al setup, in cui
138
vengono attivati i pin a cui sono collegate le elettrovalvole; la terza, infine, che corrisponde
al loop, ed è divisa a sua volta in tre sezioni distinte. Di queste, la prima contiene le righe
necessarie a salvare in memoria la frequenza cardiaca immessa dell’utente tramite tastierino,
la seconda contiene le righe necessarie a salvare in memoria la percentuale di durata della
sistole e la terza contiene le righe necessarie a comandare l’apertura e la chiusura delle
valvole secondo le tempistiche impostate.
In dettaglio l’algoritmo del loop è il seguente:
• Fintanto che l’indicatore rimane 0
o Viene mostrata a schermo la richiesta di inserimento della frequenza
cardiaca;
o Il controllore si aspetta un numero con massimo 3 cifre e ogni cifra viene
salvata nella variabile (bpm);
o Viene effettuata la conversione in numerazione ASCII dei numeri inseriti;
o Alla pressione del tasto * l’indicatore viene cambiato a 1
• Fintanto che l’indicatore rimane 1
o Viene mostrata a schermo la richiesta di inserimento della percentuale di
sistole;
o Il controllore si aspetta un numero con massimo 2 cifre e ogni cifra viene
salvata nella variabile (sist);
o Viene effettuata la conversione in numerazione ASCII dei numeri inseriti;
o Alla pressione del tasto * l’indicatore viene cambiato a 2;
• Fintanto che l’indicatore rimane 2
o Vengono mostrati a schermo i parametri inseriti;
o Viene calcolato il tempo di ciascuna fase del ciclo cardiaco;
o Vengono mostrati a schermo i tempi calcolati;
o Viene modificato l’indicatore a 3;
• Fintanto che l’indicatore rimane 3
o Vengono aperte e chiuse le due valvole seguendo i tempi calcolati
precedentemente;
Nello svolgere il codice, il microcontrollore esegue una sola volta le prime due sezioni,
mentre il loop viene eseguito infinite volte, fino a che non viene resettata la scheda. Per

139
impostare una nuova coppia di parametri si può premere il tasto RESET in un momento
qualsiasi. Così facendo viene riavviato il microcontrollore e il codice viene eseguito
dall’inizio.
5.5.2 Verifica di funzionamento
Per validare il sistema di controllo ed esaminare il comportamento dei dispositivi di
assistenza ventricolare che nel banco prova verranno usati al posto del singolo ventricolo,
sono state effettuate alcune prove utilizzando i VAD disponibili in laboratorio. Durante
questi prove il VAD in esame non è stato collegato ad alcun pre e post-carico. Il flusso,
quindi, veniva prelevato e reimmesso nella stessa riserva senza fluire in nessun altro
componente.
In letteratura sono stati riscontrati i valori delle pressioni e delle frequenze (Tabella 5.10),
che possono essere impostate tramite la stazione di controllo utilizzata clinicamente (IKus).
Non è stata però trovata la corrispondenza tra livelli di pressione lato aria e gittata cardiaca
del ventricolo in quanto questi dati dipendono dal post carico. I valori di pressione da
utilizzare sono stati quindi scelti in base ad osservazioni visive sullo stato del ventricolo e
risultano diversi da quelli che verranno impostati nelle prove effettuate sull’intero banco
prova. Per garantirne il corretto funzionamento, si sono cercati i valori di pressione per cui
la membrana del ventricolo rimanesse il meno possibile tesa all’interno di una delle due
camere. In particolare sono stati cercati valori che permettessero al ventricolo di lavorare in
maniera fluida.
Tabella 5.10 Range di parametri impostabili tramite sistema di controllo Ikus.
Parametro Range possibile
Pressione sistolica [mmHg] Da 60 a 350 Pressione diastolica [mmHg] Da 0 a -100
Frequenza [bpm] Da 30 a 150 Durata relativa della sistole [%] Da 20 a 70
Affinché il ventricolo funzioni correttamente è necessario che durante ogni battito esso si
riempia e si svuoti completamente, garantendo uno stroke volume pari alla sua capacità.
Durante le prove, il corretto funzionamento del dispositivo non è stato verificato solo

140
attraverso un’analisi visiva, ma anche misurando la portata di mandata e integrandola nel
tempo per ottenere il volume eiettato.
I ventricoli solo stati caratterizzati a diverse frequenze di funzionamento. La durata di ogni
singolo battito è stata calcolata dal sistema di controllo in cui è stato necessario inserire la
percentuale del tempo di sistole.
Questo parametro viene calcolato tramite la formula di Katz e Feil riportata di seguito.
@x�x���y = �0.096 ∙ @Jw����� 33.
Le frequenze con cui sono stati testati i dispositivi sono 60, 80, 100 e 120 bpm e per ognuna
di esse è riportata in Tabella 5.11 la percentuale del tempo di sistole.
Tabella 5.11 Valori di durata relativa della sistole rispetto alla frequenza di prova.
Frequenza [bpm] Durata relativa della sistole [%]
60 31
80 36
100 40
120 44
Dai risultati delle prove eseguite è possibile innanzitutto notare che, per garantire il corretto
funzionamento del ventricolo all’aumentare della frequenza imposta, è necessario aumentare
la differenza tra la pressione di controllo massima e minima. Analizzando visivamente il
ventricolo è stato possibile osservare come il movimento della membrana ad ogni ciclo non
fosse omogeneo. In essa infatti alcune zone subiscono la deformazione prima di altre.
Inoltre è stato verificato che, al momento d’inizio della prova, la membrana non fosse
pretensionata. Questo ha garantito un andamento della curva delle pressioni corretto, in cui
è stato possibile apprezzare l’andamento crescente e asintotico al valore di pressione imposto
(Figura 5.51).

141
Figura 5.51 Andamento della pressione di comando durante la caratterizzazione del VAD da 10 ml, ottenuta impostando
una frequenza di 100bpm.
In caso di pretensionamento infatti, la stessa curva presenta più picchi in fase di sistole che
indicano gli istanti in cui le diverse zone della membrana si muovono (Figura 5.52).
Figura 5.52 Andamento della pressione di comando ottenuto durante la caratterizzazione del VAD da 10 ml con membrana
pretensionata.
Analizzando i dati registrati durante le prove si è notato un malfunzionamento del ventricolo
da 10 ml. Una delle valvole polimeriche in esso presente, è risultata infatti insufficiente
-100
-50
0
50
100
150
200
0 0,2 0,4 0,6 0,8 1
Po
rta
ta [
ml/
min
]
Tempo [s]
Caratterizzazione VAD 10 ml
-100
-50
0
50
100
150
200
0 0,2 0,4 0,6 0,8 1
Pre
ssio
ne
[m
mH
g]
Tempo [s]
Andamento della pressione di comando

142
(Figura 5.53). Ciò è stato riscontrato, oltre che analizzando i dati acquisiti, in cui risulta
evidente un rigurgito statico in fase di diastole, anche visivamente.
Figura 5.53 Andamento della pressione di comando e della portata di mandata nella caratterizzazione del VAD da 10 ml.
Per questo motivo si è scelto di utilizzare come dispositivo per la simulazione del ventricolo
unico, il VAD da 25 ml.
Infine, in fase di analisi dei dati acquisiti, si è verificato che l’onda pressoria avesse la
periodicità ricercata e che le fasi del ciclo cardiaco durassero il tempo prestabilito. Nel codice
è stato necessario introdurre un ritardo di 35 ms nella chiusura della valvola della linea di
sistole per sopperire al ritardo meccanico della stessa.
Assemblaggio circuito
In questo paragrafo vengono mostrate le configurazioni del banco prova per le diverse BSA.
In Figura 5.54 è raffigurato il circuito completo, configurato per simulare il sistema
circolatorio di pazienti pediatrici con BSA di 0.56 m2, a seguito dell’intervento secondo
Glenn. I distretti vengono evidenziati secondo lo schema a colori riportato in figura Figura
4.1. Il singolo ventricolo aspira da un atrio comune e pompa verso la compliance aortica, a
valle della quale si ha la diramazione tra distretto superiore e inferiore. I distretti inferiori,
come nel modello in Simulink vengono rappresentati con una resistenza e una compliance,
seguite dalla resistenza della vena cava inferiore. I distretti superiori, invece, sono formati
da un elemento resistivo e da una compliance e precedono il distretto polmonare.
-2,25
-1,5
-0,75
0
0,75
1,5
2,25
3
3,75
4,5
-100
-50
0
50
100
150
200
0 0,2 0,4 0,6 0,8 1
Po
rta
ta [
ml/
min
]
Pre
ssio
ne
[m
mH
g]
Tempo [s]
Andamento della pressione di comando e della
portata di mandata
Paria
Portata

143
Quest’ultimo è composto da una diramazione iniziale che permette di simulare i pazienti
nella fase iniziale post operatoria, tramite la resistenza da fissa da 1 WU, o in fase tardiva,
attraverso l’utilizzo della resistenza regolabile. A seconda della condizione che si vuole
simulare uno dei due rami viene escluso dal circuito tramite l’uso di clamp. A valle del
raccordo che riunisce queste ultime due resistenze, vi è la compliance polmonare, la
resistenza della vena polmonare e, infine, converge in un atrio comune simulato tramite
l’utilizzo di due casse aperte.
Figura 5.54 Banco prova, configurato per pazienti pediatrici con BSA di 0.56 m2. (1) VAD, dispositivo usato per
simulare il singolo ventricolo; (2) Compliance aortica; (3) Resistenza distretti inferiori; (4) Compliance distretti
inferiori; (5) Resistenza IVC; (6) Resistenza distretti superiori; (7) Compliance distretti superiori; (8) Resistenza
polmonare regolabile; (9) Resistenza polmonare da 1 WU; (10) Compliance polmonare; (11) Resistenza della vena
polmonare; (12) Prima cassa dell’atrio comune; (13) Seconda cassa dell’atrio comune.

144
In Figura 5.55 è rappresentato il circuito completo, configurato per simulare pazienti
pediatrici con BSA di 0.67 m2 a seguito dell’operazione di Glenn. Il percorso del fluido
rimane invariato e per cambiare le dimensioni del paziente vengono regolati gli elementi del
circuito. Per quanto riguarda le resistenze viene modificato l’inserimento della barra nel
mezzo poroso, mentre per aumentare i volumi delle compliance, vengono collegate alle
compliance esistenti ulteriori casse o siringhe graduate. In particolare, in questa
configurazione, vengono collegate due casse chiuse tramite un tubo da 3/16”, fissato con
attacchi Luer, alla compliance dei distretti superiori e inferiori. Per il distretto aortico e
polmonare il volume aggiuntivo, invece, viene ottenuto tramite siringhe graduate,
opportunamente fissate alla casse usate per simulare gli stessi distretti nella configurazione
associata alla BSA di 0.56 m2.

145
Figura 5.55 Banco prova configurato per pazienti pediatrici con BSA di 0.67 m2. (1) VAD dispositivo usato per simulare
il singolo ventricolo; (2) Compliance aortica; (3) Resistenza distretti inferiori; (4) Compliance distretti inferiori; (5)
Resistenza IVC; (6) Resistenza distretti superiori; (7) Compliance distretti superiori; (8) Resistenza polmonare
regolabile; (9) Resistenza polmonare da 1 WU; (10) Compliance polmonare; (11) Resistenza della vena polmonare; (12)
Prima cassa dell’atrio comune; (13) Seconda cassa dell’atrio comune.
In Figura 5.56 è riportato il circuito completo, configurato per simulare pazienti pediatrici
con BSA di 0.74 m2 a seguito dell’operazione di Glenn. Come detto precedentemente, il
circuito rimane invariato, a meno della regolazione delle resistenze e dell’aggiunta di volumi
alle compliance. In questo caso vengono collegate ulteriori casse chiuse alle compliance dei
distretti superiori, inferiori e polmonare. Per quanto riguarda il distretto aortico vengono
aggiunte 3 siringhe graduate, opportunamente fissate alla cassa usata per simulare lo stesso
distretto nella configurazione associata alla BSA di 0.56 m2.

146
Figura 5.56 Banco prova, configurato per pazienti pediatrici con BSA di 0.74 m2. (1) VAD, dispositivo usato per
simulare il singolo ventricolo; (2) Compliance aortica; (3) Resistenza distretti inferiori; (4) Compliance distretti
inferiori; (5) Resistenza IVC; (6) Resistenza distretti superiori; (7) Compliance distretti superiori; (8) Resistenza
polmonare regolabile; (9) Resistenza polmonare da 1 WU; (10) Compliance polmonare; (11) Resistenza della vena
polmonare; (12) Prima cassa dell’atrio comune; (13) Seconda cassa dell’atrio comune.
Le connessioni tra i componenti del circuito idraulico sono state effettuate mediante tubi in
Tygon da ½”, di lunghezza predefinita. Per le prove è stata utilizzata acqua demineralizzata,
utile a preservare il dispositivo di assistenza ventricolare utilizzato per simulare l’attività del
singolo ventricolo.
Come accennato precedentemente l’atrio comune viene rappresentato tramite l’utilizzo di
due casse chiuse disponibili in laboratorio, sulle quali i rubinetti Luer sono stato lasciati
aperti per permettere la comunicazione con l’esterno. È stato necessario utilizzare due casse
per smorzare le oscillazioni presenti a monte del ventricolo dovute alla pulsatilità di

147
quest’ultimo. Utilizzandone solo una, infatti, queste oscillazioni avrebbero potuto
influenzare il flusso proveniente da i distretti inferiori e dal distretto polmonare. Le casse
sono state riempite con 8 cm di acqua dalla base, in modo da ottenere un precarico di circa
5.5 mmHg.
Infine, durante le prove, per simulare la resistenza aortica e ritrovare le pressioni corrette, è
stato utilizzato uno stringivena posto a valle della compliance aortica.

148
6 Analisi e discussione dei risultati
In questo capitolo vengono riportate le curve di portata e pressione acquisite
sperimentalmente durante il funzionamento del banco prova, nelle tre diverse configurazioni
di progetto (BSA pari a 0.56, 0.67 e 0.74 m2). Tali curve vengono messe a confronto con i
risultati ottenuti dalle simulazioni in Simulink, per verificare che vi sia corrispondenza tra i
valori previsti in fase di progettazione e i valori effettivamente misurati.
Per permettere il confronto, le misurazioni sul banco prova sono state ottenute imponendo
al ventricolo unico una frequenza pari a 100 bpm e regolando la portata di mandata a 1.2
l/min.
Durante le simulazioni del banco prova, i segnali di pressione sono stati rilevati a valle della
compliance aortica (pressione aortica), a valle della compliance dei distretti superiori, a
monte della connessione con la resistenza polmonare (tratto che simula l’arteria polmonare),
a valle della compliance polmonare (tratto che simula la vena polmonare) e infine in uscita
dalla compliance associata ai distretti inferiori (tratto che simula la vena cava inferiore).
Per quanto riguarda il segnale di portata esso è stato rilevato in mandata al ventricolo (tratto
che simula l’aorta) e a monte di tutte le resistenze presenti nel circuito, in modo da valutarne
la distribuzione nei vari distretti.

149
Pressione di comando
Per ottenere una portata media di 1,2 l/min e poter, quindi, confrontare le misurazioni
effettuate sul banco prova con i dati ottenuti dalla simulazione computazionale, è stato
necessario regolare la pressione della linea d’aria nelle fasi di sistole e di diastole. Inoltre, lo
stringi vena posizionato a valle della compliance aortica ha contribuito ad ottenere questi
valori. Per rilevare l’andamento della pressione d’aria è stato posto un trasduttore di
pressione a monte del VAD. Le registrazioni effettuate per le 3 BSA sono mostrate in Figura
6.1, Figura 6.2 e Figura 6.3.
Figura 6.1 Andamento della pressione di comando e andamento della portata in uscita dal VAD per BSA di 0.56 m2.
-40-20020406080100120140160180200
-1
0
1
2
3
4
5
0 0,5 1 1,5 2
Pre
ssio
ne
[m
mH
g]
Po
rta
ta [
l/m
in]
Tempo [s]
Andamento della pressione di comando e
della portata in uscita dal VAD - BSA 0,56 m2
Portata
Pressione

150
Figura 6.2 Andamento della pressione di comando dell''aria e andamento della portata in uscita dal VAD per BSA di
0.67 m2.
Figura 6.3 Andamento della pressione di comando dell''aria e andamento della portata in uscita dal VAD per BSA di
0.74 m2.
Dai grafici si evince che i valori di pressione della linea d’aria variano a seconda della BSA
che si sta simulando. Per la BSA di 0.56 m2 i valori limite raggiunti dalla pressione sono
rispettivamente 79.20 e -30.11 mmHg mentre, per quanto riguarda la BSA di 0.67 m2, essi
raggiungono picchi di 72.48 e -45.13 mmHg: Infine nel circuito associato alla BSA di 0.74
m2 la stessa pressione varia da 66.06 a -50.96 mmHg.
-50
-25
0
25
50
75
100
125
150
175
200
-1
0
1
2
3
4
5
0 0,5 1 1,5 2
Pre
ssio
ne
[m
mH
g]
Po
rta
ta [
l/m
in]
Tempo [s]
Andamento della pressione di comando e della
portata in uscita dal VAD - BSA 0.67 m2
Portata
Pressione
-50
-25
0
25
50
75
100
125
150
175
200
225
250
-1
0
1
2
3
4
5
0 0,5 1 1,5 2
Pre
ssio
ne
[m
mH
g]
Po
rta
ta [
l/m
in]
Tempo [s]
Andamento della pressione di comando e della
portata in uscita dal VAD - BSA 0.74 m2
Portata
Pressione

151
Per tutti i grafici si nota come l’andamento della pressione d’aria presenti dei picchi anomali
in fase di sistole e di diastole. Essi dipendono dal movimento della membrana durante il
ciclo cardiaco. Per il corretto funzionamento del VAD, la membrana, durante la fase di
sistole, dovrebbe essere completamente appiattita contro la parete della camera del liquido
mentre, durante la fase di diastole dovrebbe tendersi fino a toccare la parete della camera
d’aria. In questo modo lo stroke volume ottenuto sarebbe pari alla capacità del VAD
utilizzato e le curve della pressione di comando presenterebbero l’andamento mostrato in
Figura 5.51. Nel caso in esame, però, il VAD, per garantire uno stroke volume di 12 ml, non
si riempie e non si svuota completamente. Lo spostamento della membrana tra una fase e
l’altra risulta quindi instabile e per questo motivo la membrana risulta sempre pretensionata.
Questo movimento discontinuo tra un ciclo e l’altro si traduce in picchi anomali nel tracciato
pressorio del ventricolo lato aria.
Portata in mandata al VAD (Swanson e Clark)
In Figura 6.4, Figura 6.5 e Figura 6.6 sono riportati i confronti tra le portate acquisite
sperimentalmente in mandata al VAD e la curva proposta da Swanson e Clark, impostata
come sorgente di ingresso nelle simulazioni effettuate in Simulink.
Figura 6.4 Confronto tra la portata misurata sperimentalmente in uscita dal VAD e quella ottenuta dal modello Simulink.
Valori sperimentali per BSA di 0.56 m2: �� = 1.35 l/min, Qmax = 4.49 l/min.
-1
0
1
2
3
4
5
6
7
8
0 0,5 1 1,5 2 2,5 3 3,5 4
Po
rta
ta [
l/m
in]
Tempo [s]
Confronto portate in uscita dal VAD - BSA 0.56 m2
Sperimentale
Simulink

152
Figura 6.5 Confronto tra la portata misurata sperimentalmente in uscita dal VAD e quella ottenuta dal modello Simulink.
Valori sperimentali per BSA di 0.67 m2: �� = 1.27 l/min, Qmax = 4.02 l/min.
Figura 6.6 Confronto tra la portata misurata sperimentalmente in uscita dal VAD e quella ottenuta dal modello Simulink.
Valori sperimentali per BSA di 0.74 m2: �� = 1.23 l/min, Qmax = 4.04 l/min.
Dai grafici si evince che le curve sperimentali seguono lo stesso andamento proposto dalla
Swanson e Clark benché il picco massimo risulti per tutte e tre le BSA minore di quello
teorico (4.47 l/min per BSA pari a 0.56 m2, 4.02 l/min per BSA pari a 0.67 m2, 4.04 l/min
per BSA pari a 0.74 m2). In ogni grafico, durante la fase di diastole, la portata oscilla intorno
a 0 l/min e questo dato conferma l’ottimo stato delle valvole polimeriche interne al
-1
0
1
2
3
4
5
6
7
8
0 0,5 1 1,5 2 2,5 3 3,5 4
Po
rta
ta [
l/m
in]
Tempo [s]
Confronto portate in uscita dal VAD - BSA 0.67 m2
Sperimentale
Simulink
-1
0
1
2
3
4
5
6
7
8
0 0,5 1 1,5 2 2,5 3 3,5 4
Po
rta
ta [
l/m
in]
Tempo [s]
Confronto portate in uscita dal VAD - BSA 0.74 m2
Sperimentale
Simulink

153
ventricolo. Nelle prove sperimentali viene richiesto uno stroke volume pari a 12 ml in modo
da ottenere, insieme alla frequenza cardiaca di 100 bpm, una portata media di 1.2 l/min. I
valori di stroke volume ottenuti integrando le curve sperimentali sono di 14.1 ml per quanto
riguarda la BSA di 0.56 m2, 13.24 ml per la portata associata alla BSA di 0.67 m2 e 12.77
ml per le misurazioni svolte sul circuito riferito alla BSA di 0.74 m2. Questi valori sono
dovuti al fatto che, nonostante la misurazione riportata in Figura 6.6 abbia picchi più bassi,
le curve sono più larghe, e aumentano così il valore dell’area sottesa.
Pressione aortica
In Figura 6.7, Figura 6.8 e Figura 6.9 sono riportati i tracciati della pressione aortica, acquisiti
per ogni BSA e il relativo confronto con i risultati della simulazione effettuata in Simulink.
Figura 6.7 Confronto tra la pressione nel distretto aortico misurata sperimentalmente e ottenuta dal modello Simulink
per BSA 0.56 m2. I valori di pressione media, massima e minima per il banco prova sono: �� = 55.88 mmHg, Pmax = 74.04
mmHg, Pmin = 38.25 mmHg. I valori di pressione media, massima e minima per il modello Simulink sono: �� = 56.77
mmHg, Pmax = 71.95 mmHg, Pmin = 40.33 mmHg.
0
10
20
30
40
50
60
70
80
0 0,5 1 1,5 2 2,5 3 3,5 4
Pre
ssio
ne
[m
mH
g]
Tempo [s]
Confronto pressione aortica - BSA 0.56 m2
Simulink
Sperimentale

154
Figura 6.8 Confronto tra la pressione nel distretto aortico misurata sperimentalmente e ottenuta dal modello Simulink
per BSA 0.67 m2. I valori di pressione media, massima e minima per il banco prova sono: �� =49.78 mmHg, Pmax = 62.20
mmHg, Pmin = 36.81 mmHg. I valori di pressione media, massima e minima per il modello Simulink sono: �� = 48.24
mmHg, Pmax = 62.41 mmHg, Pmin = 34.85 mmHg.
Figura 6.9 Confronto tra la pressione nel distretto aortico misurata sperimentalmente e ottenuta dal modello Simulink
per BSA 0.74 m2. I valori di pressione media, massima e minima per il banco prova sono: �� = 44.72 mmHg, Pmax = 57.44
mmHg, Pmin = 33.31 mmHg. I valori di pressione media, massima e minima per il modello Simulink sono: �� = 46.60
mmHg, Pmax = 57.62 mmHg, Pmin = 34.92 mmHg.
Come si evince dai grafici riportati, i segnali pressori computazionali e sperimentali sono
confrontabili sia come andamento che come valori. Ciò può essere ben apprezzato dal
dettaglio degli andamenti e dai valori riportati nella didascalia di ogni grafico.
0
10
20
30
40
50
60
70
80
0 0,5 1 1,5 2 2,5 3 3,5 4
Pre
ssio
ne
[m
mH
g]
Tempo [s]
Confronto pressione aortica - BSA 0.67 m2
Simulink
Sperimentale
0
10
20
30
40
50
60
70
80
0 0,5 1 1,5 2 2,5 3 3,5 4
Pre
ssio
ne
[m
mH
g]
Tempo [s]
Confronto pressione aortica - BSA 0.74 m2
Simulink
Sperimentale

155
Confronto delle portate tra distretti superiori e vena polmonare
Come anticipato nel paragrafo 5.6, nel banco prova sono state utilizzate due casse per
simulare l’atrio unico. Questa scelta è stata necessaria per impedire alle oscillazioni, dovute
alla pulsatilità del ventricolo, di disturbare i segnali di portata e di pressione misurati nei
distretti direttamente comunicanti con l’atrio. L’andamento delle curve riferite a questi
segnali deve infatti essere smorzato man mano che la loro acquisizione avviene
allontanandosi dal ventricolo. Lo stesso comportamento si verifica fisiologicamente ed è
dovuto alla presenza degli elementi complianti nel circuito percorso dal sangue, che per i
distretti inferiori e superiori raggiungono valori elevati di compliance.
In Figura 6.10, Figura 6.11 e Figura 6.12 viene raffigurata, per ogni BSA, la portata rilevata
sperimentalmente a monte della resistenza dei distretti superiori, della resistenza del distretto
polmonare e della resistenza della vena polmonare. In ogni grafico è presente anche il
confronto con i dati risultanti dalle simulazioni effettuate in Simulink.

156
Figura 6.10 Confronto tra le portate misurate a monte delle resistenze di ciascun distretto con quelle ottenute dalla
simulazione in Simulink. Distretti superiori (A), distretto polmonare (B), vena polmonare (C).
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
2
0 1 2 3 4
Po
rta
ta [
l/m
in]
Tempo [s]
Confronto portate nei distretti
superiori - BSA 0.56 m2
Sperimentale
Simulink
A
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
2
0 1 2 3 4
po
rta
ta [
l/m
in]
Tempo [s]
Confronto portate nel distretto
polmonare - BSA 0.56 m2
Sperimentale
Simulink
B
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
2
0 1 2 3 4
Po
rta
ta [
l/m
in]
Tempo [s]
Confronto portate nella vena
polmonare - BSA 0.56 m2
Sperimentale
Simulink
C

157
Figura 6.11 Confronto tra le portate misurate a monte delle resistenze di ciascun distretto con quelle ottenute dalla
simulazione in Simulink. Distretti superiori (A), distretto polmonare (B), vena polmonare (C).
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
2
0 1 2 3 4
Po
rta
ta [
l/m
in]
Tempo [s]
Confronto portate nei distretti
superiori - BSA 0.67 m2
Sperimentale
Simulink
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
2
0 1 2 3 4
po
rta
ta [
l/m
in]
Tempo [s]
Confronto portate nel distretto
polmonare - BSA 0.67 m2
Sperimentale
Simulink
B
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
2
0 1 2 3 4
Po
rta
ta [
l/m
in]
Tempo [s]
Confronto portate nella vena
polmonare - BSA 0.67 m2
Sperimentale
Simulink
C

158
Figura 6.12 Confronto tra le portate misurate a monte delle resistenze di ciascun distretto con quelle ottenute dalla
simulazione in Simulink. Distretti superiori (A), distretto polmonare (B), vena polmonare (C).
Osservando in successione le acquisizioni ottenute dai vari distretti, si evince che il banco
prova è in grado di riprodurre gli andamenti di pressione e portata desiderati. L’andamento
della portata, misurato a monte della resistenza della vena polmonare (Figura 6.10 C, Figura
6.11 C; Figura 6.12 C), risulta infatti smorzato rispetto a quello registrato nel distretto
polmonare (Figura 6.10 B, Figura 6.11 B, Figura 6.12 B). Entrambi i segnali risultano invece
essere molto smorzati rispetto al segnale acquisito a monte dei distretti superiori (Figura 6.10
A, Figura 6.11 A, Figura 6.12 A).
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
2
0 1 2 3 4
Po
rta
ta [
l/m
in]
Tempo [s]
Confronto portate nei distretti
superiori - BSA 0.74 m2
Sperimentale
Simulink
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
2
0 1 2 3 4
po
rta
ta [
l/m
in]
Tempo [s]
Confronto portate nel distretto
polmonare - BSA 0.74 m2
Sperimentale
Simulink
B
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
2
0 1 2 3 4
Po
rta
ta [
l/m
in]
Tempo [s]
Confronto portate nella vena
polmonare - BSA 0.74 m2
Sperimentale
Simulink
C

159
Infine, confrontando singolarmente ogni curva sperimentale con quella ottenuta da Simulink,
si evince che i segnali teorici e sperimentali siano confrontabili sia come andamento che
come valori.
In Appendice B sono riportati i grafici contenenti il confronto tra le altre portate e pressioni
acquisite sul banco prova e i risultati delle simulazioni effettuate in Simulink.

160
7 Conclusioni e sviluppi futuri
L’obiettivo di questo lavoro di tesi è la progettazione e la realizzazione di un banco prova,
utile a simulare la circolazione patologica pediatrica di pazienti con un unico ventricolo. In
particolare, il simulatore idraulico costruito, è adatto per simulare il sistema
cardiocircolatorio in caso di ipoplasia del ventricolo sinistro.
Per garantire la sopravvivenza di pazienti affetti da tale malformazione, è necessario
intervenire chirurgicamente sin dalla nascita. La procedura che viene adottata più
frequentemente prevede tre operazioni. Il primo intervento, che prende il nome di Norwood,
viene poi seguito, dopo pochi mesi, da quello che rappresenta il secondo stadio della
procedura palliativa, l’intervento di Glenn. Infine, dopo un periodo che può variare da due a
cinque anni, si interviene con l’ultima operazione della procedura, l’intervento di Fontan.
Essa, conclude la serie di interventi necessari ad ottenere una circolazione compatibile con
la vita.
In letteratura sono presenti numerosi studi sulla circolazione di Fontan poiché, in generale,
essa precede il trapianto di cuore. Negli ultimi anni, però, sono in corso diverse ricerche atte
a migliorare le condizioni del paziente in seguito all’intervento di Glenn per evitare il terzo
stadio della procedura palliativa. La necessità di passare all’intervento di Fontan è infatti
dovuta al fallimento della circolazione di Glenn che se non trattata rapidamente porterebbe
alla morte del paziente. Le principali cause per cui la circolazione di Glenn fallisce sono
[57]:
- l’insufficienza sistolica;
- l’insufficienza diastolica;
- l’ipertensione polmonare;
- condizione mista delle tre precedenti.
Il banco prova sviluppato in questo lavoro di tesi può servire, quindi, come strumento per
meglio comprendere come supportare il paziente in queste condizioni.
Lo studio svolto, si è focalizzato su 3 gruppi di pazienti con età di 2, 4 e 5 anni per poter
esaminare le variazioni di pressioni e portate nei diversi distretti corporei all’aumentare
dell’età.
Il primo passo per la progettazione del banco prova è stato l’implementazione di un modello
elettrico in silico, sviluppato in ambiente Matlab®. Questo modello viene ottenuto tramite la

161
rielaborazione di modelli più complessi che vengono semplificati per arrivare al numero di
elementi desiderato. Utilizzando questi modelli e le equazioni allometriche è stato possibile
ottenere i valori dei componenti di ogni singolo distretto. La parte di progettazione del
modello a parametri concentrati si è conclusa con la sua validazione, in cui si è verificato
che le pressioni e le portate ottenute nei diversi distretti della rete assumessero valori
concordi con quelli ricavati da cateterismo.
È stato poi sviluppato un circuito che permettesse di limitare gli ingombri, simulare la
resistenza e l’elastanza dei vasi e di regolare gli elementi che lo compongono. Ciò rende il
banco prova adatto alla simulazione di diverse BSA, senza dover rimuovere e sostituire i
componenti presenti.
Per quanto riguarda gli elementi resistivi, è stata studiata una soluzione tecnica in grado di
ottimizzare gli spazi, ridurre le perdite di carico, ed essere regolabile. Sfruttando la stampa
3D, sono stati ottenuti diversi provini, a forma di cilindro cavo, che possono essere
approssimati a porosi e, quindi, ai quali può essere applicata la legge di Darcy. In seguito
alla loro caratterizzazione sono stati dimensionati gli elementi utilizzati nel circuito e sono
stati progettati e costruiti gli alloggiamenti. Sfruttando una barra piena, inserita nel foro
centrale del mezzo poroso, si regola la lunghezza di provino che oppone resistenza al
passaggio del fluido.
Per simulare la componente elastica dei vasi, si è scelto invece, di utilizzare casse d’aria
chiuse, sfruttando gli studi precedenti sulle camere Windkessel. Esse possono essere regolate
collegando volumi prefissati ai rubinetti predisposti sul loro coperchio. Ciò permette di
ampliare la loro capacità e di conseguenza ridurre la loro rigidezza.
L’ultimo elemento di cui si tiene conto è l’inertanza offerta dalla massa di fluido in
movimento, che viene simulata sezionando opportunamente i tubi di connessione tra un
componente e l’altro.
Siccome nella realizzazione del banco prova viene utilizzato un VAD per simulare il
ventricolo unico, è stato necessario provvedere anche al controllo e all’attuazione di
quest’ultimo. Per fare ciò è stato realizzato ad hoc un circuito pneumatico comandato da una
scheda Arduino. Il controllo del dispositivo pulsatile viene effettuato impostando la
frequenza cardiaca e la durata relativa della sistole, parametri che servono a regolare
l’apertura e la chiusura di elettrovalvole poste nel circuito di attuazione pneumatico.
162
Le prove effettuate sul circuito completo hanno permesso di valutare la precisione che il
banco prova ha nel simulare la circolazione sanguigna, in pazienti pediatrici affetti da
patologie con ventricolo unico. Sono state rilevate pressioni e portate a cavallo di ogni
distretto e questi dati sono stati confrontati con quelli ottenuti dalla simulazione
computazionale. I tracciati sono confrontabili per forma d’onda e valor medio in ciascun
distretto; si può quindi ritenere che il banco prova sia uno strumento valido per riprodurre in
vitro il modello a parametri concentrati.
Il banco prova realizzato risulta versatile in quanto permette di valutare pressioni e portate,
in corrispondenza dei diversi distretti, per diversi valori di BSA.
Durante la progettazione del simulatore si è deciso di realizzare due elementi resistivi per il
distretto polmonare; uno in grado di offrire un valore di resistenza fisso di 1 WU, e l’altro
regolabile, con cui si può ottenere una resistenza da 4 a 9 WU. Questa scelta è stata fatta
poiché in condizioni patologiche stabili la resistenza polmonare dopo l’intervento di Glenn
assume un valore nell’intorno di 1WU, mentre con il passare del tempo aumenta, a causa di
complicazioni, fino a circa 4 WU.
Il dispositivo realizzato, quindi è in grado di riprodurre sia la condizione che si ottiene subito
dopo il secondo stadio della procedura palliativa (condizione patologica stabile), sia nella
sua fase tardiva (condizione patologica aggravata).
Per quanto riguarda gli sviluppi futuri del progetto svolto, si può pensare di migliorare la
tecnologia utilizzata per ottenere le resistenze. I campioni porosi, infatti, pur essendo di
facile ripetibilità poiché stampati in 3D, non risultato ortotropi e quindi sono difficilmente
dimensionabili. Anche il codice implementato per il sistema di controllo può essere
ottimizzato inserendo controlli sugli inserimenti effettuati dall’utente.
Dal punto di vista del suo utilizzo, invece, questo banco prova può servire come strumento
per valutare le condizioni di un paziente al secondo stadio della procedura di Norwood, sia
in condizioni stabili che in seguito allo sviluppo di determinate patologie. La possibilità di
regolare singolarmente ogni parametro permette infatti di simulare disfunzioni come
l’insufficienza sistolica, l’insufficienza diastolica, l’ipertensione polmonare e di analizzare
le pressioni e le portate a cavallo dei distretti del circuito.
Mediante l’utilizzo di questo strumento è inoltre possibile indagare come variano i parametri
di interesse (pressioni e portate) nel caso di circolazione assistita. Come spiegato nel
paragrafo 5.5, il circuito pneumatico è predisposto per la connessione di una seconda linea

163
d’aria, che può essere usata per comandare un VAD adibito all’assistenza del ventricolo
unico. È possibile analizzare il comportamento del dispositivo a seconda della frequenza
imposta, della portata, e del tipo di incannulazione effettuata (atriale o ventricolare).
Infine, poiché i collegamenti tra tubi ed elementi avvengono attraverso connettori, è
possibile collegare il tubo posto a valle della resistenza della vena cava inferiore a monte del
distretto polmonare, ottenendo così il circuito corrispondente all’operazione di Fontan. Tale
configurazione risulta utile per confrontare, per una stessa BSA o per una stessa patologia,
l’andamento di pressione e portate a seguito dei due diversi interventi.

164

165
Bibliografia
[1] A. Baretta, «Modelli Multiscala Patient Specific Per La Pianificazione Chirurgica Nel
Trattamento Di Malformazioni Cardiache Congenite,» 2010. [Online].
[2] D. U. Silverthorn, Human Physiology: An Integrated Approach, 2013.
[3] F. M. A. Redaelli, Biomeccanica. Analisi multiscala di tessuti biologici, Pàtron, 2009.
[4] F. Baldissera, Fisiologia e biofisica medica, Poletto, 2009.
[5] M. C. Barry J. Maron, M. F. Jeffrey A. Towbin e M. Gaetano Thiene, «Contemporary
Definitions and Classification of the Cardiomyopathies,» Circulation, 2006.
[6] L. Lu, R. Sun, M. Liu, Y. Zheng e P. Zhang, «The Inflammatory Heart Diseases -
Causes, Symptoms, and Treatments,» Cell Biochem Biophys, 2015.
[7] J. M. Leslie T. Cooper, «Myocarditis,» New England Journal of Medicine, 2009.
[8] «National Heart, Lung, and Blood Institute,» [Online]. Available:
https://www.nhlbi.nih.gov/. [Consultato il giorno 9 Marzo 2017].
[9] J. I. E, Hoffman e S. Kaplan, «The Incidence of Congenital Heart Disease,» Journal
of the American College of Cardiology, 2002.
[10] C. Mary Ella Pierpont e C. T. Basson, «Genetic Basis for Congenital Heart Defects:
Current Knowledge,» 2007.
[11] J. Roos-Hesselink, W. Kerstjens-Frederikse, F. Meijboom e P. Pieper, «Inheritance
of congenital heart disease,» 2008.
[12] «Boston Children's Hospital,» [Online]. Available:
http://www.childrenshospital.org/. [Consultato il giorno 9 Marzo 2017].
[13] R. C. a. G. Limongelli, «Complete atrioventricular canal,» Orphanet Journal of Rare
Diseases, 2006.
[14] 2. Frederique Bailliard* 1 and Robert H Anderson 1, «Tetralogy of Fallot,» Orphanet
Journal of Rare Diseases, 2009.
[15] C. Apitz, G. D. Webb e A. N. Redington, «Tetralogy of Fallot,» Lancet, 2009.

166
[16] M. Douglas J. Schneider e M. M. John W. Moore, «Patent ductus arteriosus,» 2006.
[17] C. H. A. Jost, H. M. Connolly e J. A. Dearani, «Ebstein’s Anomaly,» 2007.
[18] B. Ferdman e G. Singh, «Persistent Truncus Arteriosus,» 2003.
[19] P. S. Rao, «Tricuspid Atresia,» 2000.
[20] H. Vyas e D. J. Hagler, «Double Inlet Left Ventricle,» 2007.
[21] D. Obler, A. L. Juraszek, L. B. Smoot e M. R. Natowicz, «Double outlet right ventricle
- aetiologies and associations,» 2009.
[22] E. Hayek, C. N. Gring e B. P. Griffin, «Mitral valve prolapse,» 2005.
[23] Brown, U. Gudjonsson e J. W., «Scimitar Syndrome,» 2006.
[24] D. J. Barron, M. D. Kilby, B. Davies, J. G. C. Wright, T. J. Jones e W. J. Brawn,
«Hypoplastic left heart syndrome,» 2009.
[25] S. J.M., «Hypoplastic left heart syndrome,» 2000.
[26] Thiagarajan e J. A. C. a. Ravi, «Hypoplastic left heart syndrome,» 2007.
[27] D. S. Fruitman e F. o. Medicine, «Hypoplastic left heart syndrome: Prognosis and
management options,» 2000.
[28] R. B. Hinton, L. J. Martin e M. E. Tabangin, «Hypoplastic Left Heart Syndrome Is
Heritable,» 2007.
[29] D. J. Barron, M. D. Kilby, B. Davies, J. G. C. Wright, T. J. Jones e W. J. Brawn,
«Hypoplastic left heart syndrome,» 2009.
[30] F. MusuMeci, A. L. Forte, A. Montalto, F. Ranocchi e P. L. d. Monica, «Assistenza
Meccanica Cardiocircolatoria A Medio-Lungo Termine Come Ponte Al Trapianto
Cardiaco,» 2008.
[31] F. Fattirolli, M. Bonacchi, C. Burgisser, T. Cellai, S. Francini, S. Valente, G. Sani e
G. F. Gensini, «Riabilitazione cardiologica di pazienti con supporto circolatorio
mediante dispositivo di assistenza ventricolare sinistra,» 2009.
[32] F. Gandolfo, F. D. Rita, A. Hasan e M. Griselli, «Mechanical circulatory support in
pediatrics,» 2014.

167
[33] «Medtronic,» [Online]. Available: http://www.medtronic.com/us-en/healthcare-
professionals/products/cardiovascular/pediatric-perfusions/bp-50.html. [Consultato il
giorno 2017 Marzo 16].
[34] «Thoratec,» [Online]. Available: http://www.thoratec.com/medical-
professionals/vad-product-information/thoratec-centrimag.aspx. [Consultato il
giorno 2017 Marzo 16].
[35] «MAQUET GETINGE GROUP,» [Online]. Available:
https://www.maquet.com/int/products/rotaflow-centrifugal-pump/. [Consultato il
giorno 2017 Marzo 16].
[36] «Kardia, soluzioni per scienze mediche,» [Online]. Available:
http://www.kardia.it/dispositivi-medici/tandemheart-system/. [Consultato il giorno
2017 Marzo 16].
[37] M. Kirsch, J.-P. Mazzucotelli, J.-C. Roussel, O. Bouchot, J. N'Loga, P. Leprince, P.-
Y. Litzler e A. Vincentelli, «Survival after biventricular mechanical circulatory
support: Does the type of device matter?,» The Journal of Heart and Lung
Transplantation, 2012.
[38] «Berlin Heart,» [Online]. Available:
http://www.berlinheart.de/index.php/home/choose_region. [Consultato il giorno 15
Marzo 2017].
[39] R. Hetzer, F. Kaufmann e E. M. D. Walter, «Paediatric mechanical circulatory support
with Berlin Heart EXCOR: development and outcome of a 23-year experience,»
2016.
[40] J. A. L. ROSE, D. TAMEZ, M. ASHENUGA e C. REYES, «Design Concepts and
Principle of Operation of the HeartWare Ventricular Assist System,» 2010.
[41] «HeartWare,» [Online]. Available: https://www.heartware.com/. [Consultato il
giorno 15 Marzo 2017].
[42] M. George P. Noon, «Current Status of the MicroMed DeBakey Noon Ventricular
Assist Device,» 2010.
[43] «Jarvik Heart,» [Online]. Available: http://www.jarvikheart.com/products/the-jarvik-
2000/. [Consultato il giorno 2017 Marzo 16].

168
[44] «Berlin Heart INCOR,» [Online]. Available:
http://www.berlinheart.de/index.php/patienten/content/patients_products/patients_pr
oducts_incor. [Consultato il giorno 2017 Marzo 17].
[45] «Thoratec HeartMate II LVAD,» [Online]. Available:
http://www.thoratec.com/medical-professionals/vad-product-information/heartmate-
ll-lvad.aspx. [Consultato il giorno 2017 Marzo 17].
[46] G. D. Fusco, Confronto dei modelli Windkessel a tre o a quattro elementi per la
circolazione sistemica.
[47] A. Guyton, T. Coleman e H. Granger, «Circulation: overall regulation.,» Annual
Review of Physiology, vol. 34, 1972.
[48] W. Nicolaas, N. Stergiopulos e M. I. Noble, Snapshots of hemodynamics. An aid for
clinical research and graduate education, 2010.
[49] G. Ferrari, C. D. Lazzari, R. Mimmo, G. Tosti e D. Ambrosi, «A modular numerical
model of the cardiovascular system for studying and training in the field of
cardiovascular physiopathology,» Journal of Biomedical Engineering, 2012.
[50] V. Marija, C. John e C. Timothy, «Mock Circulatory System of the Fontan Circulation
to Study Respiration Effects on Venous Flow Behavior,» American Society for
Artificial Internal Organs Journal, 2013.
[51] C. M. Parabiaghi e M. S. Vicario, Progettazione e realizzazione di un banco prova
per la simulazione della circolazione pediatrica fisiologica e patologica , 2014.
[52] C. Swanson, A simple cardiovascular system simulator: design and performance,
Journal of Bioengeneering 1: 135-45, 1976.
[53] D. Timms, M. Hayne, K. McNei e A. Galbraith, «A Complete Mock Circulation Loop
for the Evaluation of Left, Right, and Biventricular Assist Devices,» Artificial
Organs, 2005.
[54] R. Figliola, A. Giardini e T. Conover, «In vitro simulation and validation of the
circulation with congenital heart defects,» Progress in Pediatric Cardiology, 2010.
[55] F. Huang, X. Ruan e J. Z. e. al., «A Fast Building and Effective Hydraulic Pediatric
Mock Circulatory System for the Evaluation of a Left Ventricular Assist Device.,»
ASAIO journal, 2013.

169
[56] Pugovkin, A. A. Selishchev e S. V. Telyshev, «Simulator for Modeling the
Cardiovascular System for Testing Circulatory Assist Devices,» Biomedical
Engineering, 2015.
[57] D. Horne, J. Conway, I. M. Rebeyka e H. Buchholz, «Mechanical Circulatory Support
in Univentricular Hearts,» Pediatric cardiac surgery annual, 2015.

170

171
APPENDICE A
#include <LiquidCrystal.h>
#include <Keypad.h>
const byte ROWS = 4;
const byte COLS = 3;
char keys[ROWS][COLS] = {
{'1', '2', '3'},
{'4', '5', '6'},
{'7', '8', '9'},
{'*', '0', '#'}
};
byte rowPins[ROWS] = {33, 35, 37, 39};
byte colPins[COLS] = {41, 43, 45};
Keypad tastierino = Keypad( makeKeymap(keys), rowPins, colPins, ROWS, COLS
);
LiquidCrystal lcd(1, 2, 4, 5, 6, 7 );
int bpm = 0;
int sist = 0;
int flag = 0;
int i;
unsigned int tsist = 0;
int tdiast = 0;
int tbattito = 0;
char key_temp;
void setup() {
lcd.begin(16, 2);
lcd.noAutoscroll();
pinMode(22, OUTPUT);
pinMode(24, OUTPUT);
}
void loop() {
while (flag == 0) {
lcd.clear();
lcd.print("Inserire bpm: ");
172
for (i = 0; i < 4; i++) {
char key = tastierino.waitForKey();
if (key != '*') {
key_temp = key;
bpm = bpm * 10 + key - 48;
lcd.setCursor(0, 1);
lcd.print(bpm);
}
if (key == '*') {
flag = 1;
i = 3;
delay(500);
lcd.clear();
}
}
}
while (flag == 1) {
lcd.print("% sistole: ");
for (i = 0; i < 3; i++) {
char key1 = tastierino.waitForKey();
if (key1 != '*') {
sist = sist * 10 + key1 - 48;
lcd.setCursor(0, 1);
lcd.print(sist);
}
if (key1 == '*') {
flag = 2;
i = 2;
delay(500);
lcd.clear();
}
}
}
if (flag == 2) {
lcd.setCursor(0, 0);
lcd.print("bpm:");
lcd.setCursor(6, 0);
lcd.print(bpm);
lcd.setCursor(0, 1);

173
lcd.print("% sist:");
lcd.setCursor(8, 1);
lcd.print(sist);
delay(2000);
tbattito = 60000 / bpm;
tsist = sist * tbattito;
tsist = tsist / 100 ;
tsist = tsist - 35;
tdiast = tbattito - tsist;
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("tsist[ms]:");
lcd.setCursor(11, 0);
lcd.print(tsist);
lcd.setCursor(0, 1);
lcd.print("tdiast[ms]:");
lcd.setCursor(12, 1);
lcd.print(tdiast);
flag = 3;
}
while (flag == 3) {
char key2 = tastierino.getKey();
if (key2 == '#') {
flag = 0;
bpm = 0;
sist = 0;
break;
}
else {
digitalWrite(22, HIGH);
digitalWrite(24, LOW);
delay(tsist);
digitalWrite(22, LOW);
digitalWrite(24, HIGH);
delay(tdiast);
}
}
}

174
APPENDICE B
Rilevazioni sperimentali riferite alla BSA di 0.56 m2.
Figura B.1 Confronto tra la pressione misurata sperimentalmente nei distretti superiori e quella ottenuta dal modello
Simulink per BSA di 0.56 m2.
Figura B.2 Confronto tra la pressione misurata sperimentalmente nel distretto polmonare e quella ottenuta dal modello
Simulink per BSA di 0.56 m2.
0
1
2
3
4
5
6
7
8
9
10
0 0,5 1 1,5 2 2,5 3 3,5 4
Pre
ssio
ne
[m
mH
g]
Tempo [s]
Confronto pressioni nei distretti superiori - BSA 0.56 m2
Sperimentale
Simulink
0
1
2
3
4
5
6
7
8
9
10
0 0,5 1 1,5 2 2,5 3 3,5 4
Pre
ssio
ne
[m
mH
g]
Tempo [s]
Confronto pressioni distretto polmonare - BSA 0.56 m2
Sperimentale
Simulink

175
Figura B.3 Confronto tra la pressione misurata sperimentalmente nei distretti inferiori e quella ottenuta dal modello
Simulink per BSA di 0.56 m2.
Figura B.4 Confronto tra la portata misurata sperimentalmente nei distretti inferiori e quella ottenuta dal modello
Simulink per BSA di 0.56 m2.
0
1
2
3
4
5
6
7
8
9
10
0 0,5 1 1,5 2 2,5 3 3,5 4
Pre
ssio
ne
[m
mH
g]
Tempo [s]
Confronto pressioni nei distretti inferiori - BSA 0.56 m2
Sperimentale
Simulink
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
2
0 0,5 1 1,5 2 2,5 3 3,5 4
Po
rta
ta [
l/m
in]
Tempo [s]
Confronto portate nei distretti inferiori - BSA 0.56 m2
Sperimentale
Simulink

176
Figura B.5 Confronto tra la portata misurata sperimentalmente nella vena cava inferiore e quella ottenuta dal modello
Simulink per BSA di 0.56 m2.
Rilevazioni sperimentali riferite alla BSA di 0.67 m2.
Figura B.6 Confronto tra la pressione misurata sperimentalmente nei distretti superiori e quella ottenuta dal modello
Simulink per BSA di 0.67 m2.
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
2
0 0,5 1 1,5 2 2,5 3 3,5 4
Po
rta
ta [
l/m
in]
Tempo [s]
Confronto portate nella vena cava inferiore - BSA 0.56 m2
Sperimentale
Simulink
0
1
2
3
4
5
6
7
8
9
0 0,5 1 1,5 2 2,5 3 3,5 4
Pre
ssio
ne
[m
mH
g]
Tempo [s]
Confronto pressioni distretti superiori - BSA 0.67 m2
Sperimentale
Simulink

177
Figura B.7 Confronto tra la pressione misurata sperimentalmente nel distretto polmonare e quella ottenuta dal modello
Simulink per BSA di 0.67 m2.
Figura B.8 Confronto tra la pressione misurata sperimentalmente nei distretti inferiori e quella ottenuta dal modello
Simulink per BSA di 0.67 m2.
4
4,2
4,4
4,6
4,8
5
5,2
5,4
5,6
5,8
6
0 0,5 1 1,5 2 2,5 3 3,5 4
Pre
ssio
ne
[m
mH
g]
Tempo [s]
Confronto pressioni distretto polmonare - BSA 0.67 m2
Sperimentale
Simulink
4
4,2
4,4
4,6
4,8
5
5,2
5,4
5,6
5,8
6
0 0,5 1 1,5 2 2,5 3 3,5 4
Pre
ssio
ne
[m
mH
g]
Tempo [s]
Confronto pressioni distretti inferiori - BSA 0.67 m2
Sperimentale
Simulink
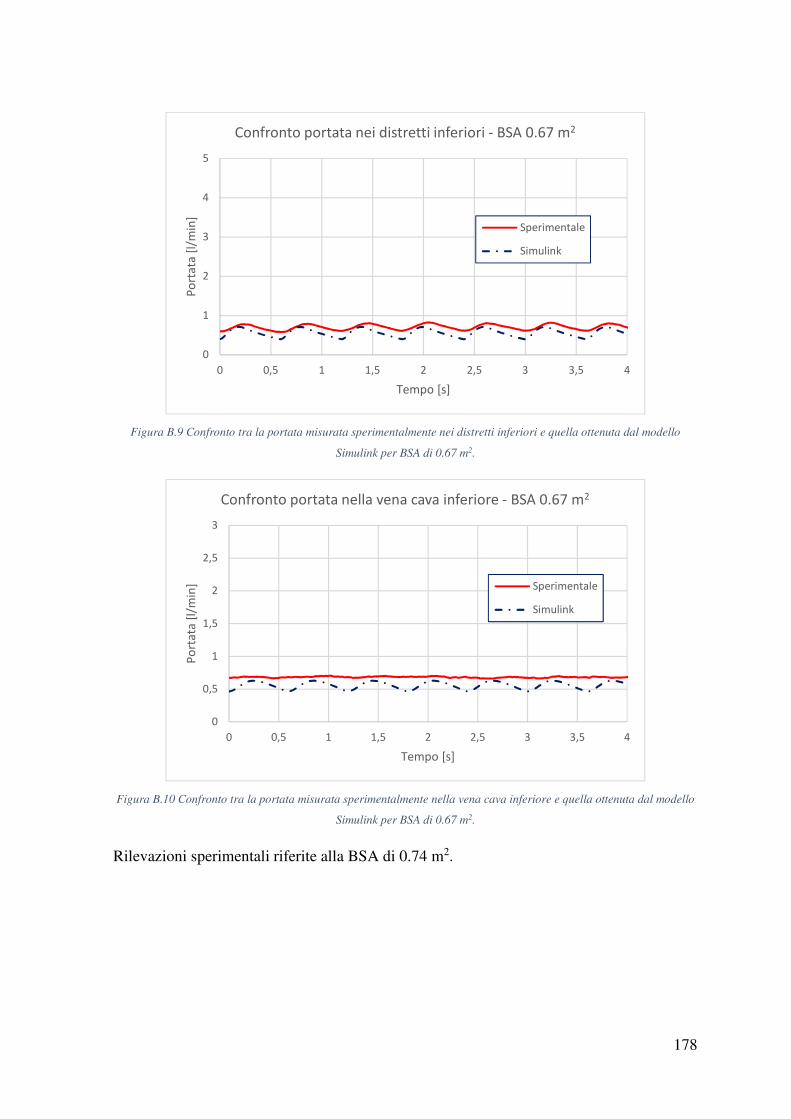
178
Figura B.9 Confronto tra la portata misurata sperimentalmente nei distretti inferiori e quella ottenuta dal modello
Simulink per BSA di 0.67 m2.
Figura B.10 Confronto tra la portata misurata sperimentalmente nella vena cava inferiore e quella ottenuta dal modello
Simulink per BSA di 0.67 m2.
Rilevazioni sperimentali riferite alla BSA di 0.74 m2.
0
1
2
3
4
5
0 0,5 1 1,5 2 2,5 3 3,5 4
Po
rta
ta [
l/m
in]
Tempo [s]
Confronto portata nei distretti inferiori - BSA 0.67 m2
Sperimentale
Simulink
0
0,5
1
1,5
2
2,5
3
0 0,5 1 1,5 2 2,5 3 3,5 4
Po
rta
ta [
l/m
in]
Tempo [s]
Confronto portata nella vena cava inferiore - BSA 0.67 m2
Sperimentale
Simulink

179
Figura B.11 Confronto tra la pressione misurata sperimentalmente nei distretti superiori e quella ottenuta dal modello
Simulink per BSA di 0.74 m2.
Figura B.12 Confronto tra la pressione misurata sperimentalmente nel distretto polmonare e quella ottenuta dal modello
Simulink per BSA di 0.74 m2.
0
1
2
3
4
5
6
7
8
9
0 0,5 1 1,5 2 2,5 3 3,5 4
Pre
ssio
ne
[m
mH
g]
Tempo [s]
Confronto pressioni nei distretti superiori - BSA 0.74 m2
Sperimentale
Simulink
0
1
2
3
4
5
6
0 0,5 1 1,5 2 2,5 3 3,5 4
Pre
ssio
ne
[m
mH
g]
Tempo [s]
Confronto pressioni distretto polmonare - BSA 0.74 m2
Sperimentale
Simulink
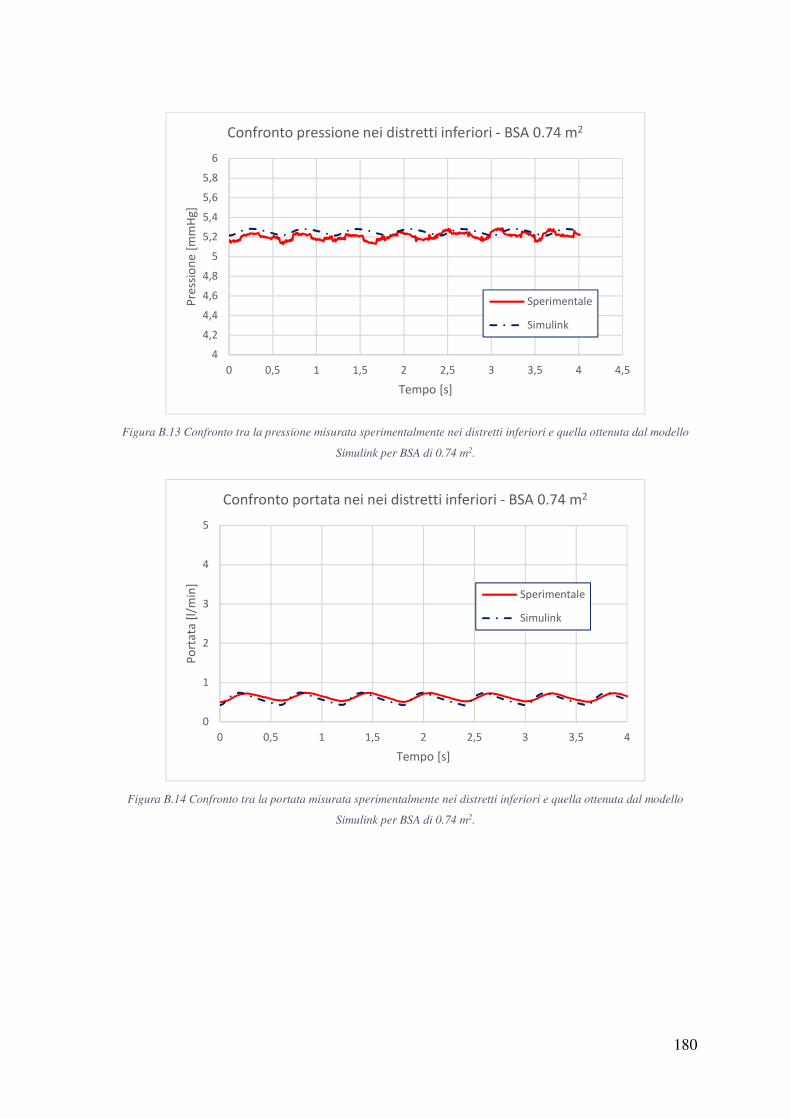
180
Figura B.13 Confronto tra la pressione misurata sperimentalmente nei distretti inferiori e quella ottenuta dal modello
Simulink per BSA di 0.74 m2.
Figura B.14 Confronto tra la portata misurata sperimentalmente nei distretti inferiori e quella ottenuta dal modello
Simulink per BSA di 0.74 m2.
4
4,2
4,4
4,6
4,8
5
5,2
5,4
5,6
5,8
6
0 0,5 1 1,5 2 2,5 3 3,5 4 4,5
Pre
ssio
ne
[m
mH
g]
Tempo [s]
Confronto pressione nei distretti inferiori - BSA 0.74 m2
Sperimentale
Simulink
0
1
2
3
4
5
0 0,5 1 1,5 2 2,5 3 3,5 4
Po
rta
ta [
l/m
in]
Tempo [s]
Confronto portata nei nei distretti inferiori - BSA 0.74 m2
Sperimentale
Simulink

181
Figura B.15 Confronto tra la portata misurata sperimentalmente nella vena cava inferiore e quella ottenuta dal modello
Simulink per BSA di 0.74 m2.
0
0,5
1
1,5
2
2,5
3
0 0,5 1 1,5 2 2,5 3 3,5 4
Po
rta
ta [
l/m
in]
Tempo [s]
Confronto portata nella vena cava inferiore - BSA 0.74 m2
Sperimentale
Simulink







![Le cardiopatie Congenite 2007 [modalità compatibilità]...(1 può essere imperforata) ¾Doppia uscita da ventricolo dx da ventricolo sx ¾1 valvola comune (solo nel tipo: singola](https://img.pdfslide.tips/doc/110x75/5e63724514a7d063700e79d8/le-cardiopatie-congenite-2007-modalit-compatibilit-1-pu-essere-imperforata.jpg)