Embed Size (px)
Citation preview

5/12/2018 budujemy robota cz_1 - slidepdf.com
http://slidepdf.com/reader/full/budujemy-robota-cz1 1/6
Budujemy Robota cz. 1
Witam.
Na imię mam Marek.
Elektroniką interesuję się od zawsze :-) .
Chcąc pozostawić coś po sobie potomnym szukałem okazji … I nadarzyła się ona poprzez ofertę
jaką znalazłem w czasopiśmie EdW . A mianowicie propozycji by powstał artykuł o budowie
robota.
Po kilku listach e-mail z redaktorem Piotrem Góreckim powstaje seria którą w chwili obecnej drogi
czytelniku masz przed oczami.
Nie jestem specjalistą w pisaniu także proszę o wyrozumiałość.
Postaram się pomóc i podpowiedzieć każdemu kto będzie chętny przystąpić do grona
konstruktorów robotów.
Tyle tytułem wstępu i zgodnie z wcześniejszymi zapowiedziami piszę ten oto artykuł.
Nie ma to być encyklopedyczny poradnik „how to” lecz koncept. Cykl ten ma pozwolićzbudować robota każdemu czytelnikowi. Także będą tu podawane miejsca gdzie co można kupić, z
czego można wyciągnąć itd.
Napęd jest specyficzny dla każdego konstruktora amatora bądź profesjonalisty (uzależniony
od możliwości technologicznych i zasobów portfela).
Dlatego konstrukcją mechaniki robota zajmiemy się pod koniec cyklu i tam też omówimy kilka
możliwych wariacji układu napędowego.
W tej części postaram się omówić kilka podstawowych tematów . Podpowiem co gdzie i jak.
Zaczniemy tworzyć płytki drukowane do 2-ch podstawowych części naszej konstrukcji. Będą to
mianowicie „mózg” robota , oraz sterownik silników.W zasadzie dzięki tym płytkom będziemy mieli możliwość uruchomienia oprogramowania na
komputerze i zabawy z programem sterującym robota (jego „inteligencją”).
Układy elektroniczne stanowią bowiem bazę do różnorakich konstrukcji. Zaprojektowane są tak by
pasowały do konstrukcji praktycznie dowolnego robota. Będzie można na nich odpalić robota klasy
sumo, minisumo, follow the line, freestyle.
Zgodnie z tym założeniem nie możemy przekroczyć wymiarów 10cm x 10cm (wymagania
minisumo) .
Co będzie nam potrzebne.
Do prac potrzebujemy narzędzi.
Jakich … no cóż na pewno będzie potrzebna lutownica , jakiś miernik, ucinaczki (cążki), cyna, być
może pinceta .Jeżeli robimy płytki samodzielnie dodatkowo potrzebować będziemy odczynników chemicznych
narzędzi do obróbki mechanicznej (między innymi np. wiertarki).
Płytki można będzie zamówić lub wykonywać samodzielnie.Do tej drugiegiej opcji przyda nam się
poradnik który znajduje się pod tym adresem:
http://www.ensyst.pl/szablon/files/METODA_ZELAZKOWA.pdf
Do „mózgu” :
Procesor – w naszej konstrukcji posłużymy się procesorem serii AVR . Dokładniej ATmega 16. W
obudowie DIP (nie każdy bowiem posiada sprzęt i umiejętności potrzebne do lutowania SMD).
Dalej potrzebujemy kilku elementów jak kondensatory , rezystory, złączki , trochę przewodów.
Do sterownika napędu:
układ L293D – jeżeli planujemy mniejszego robota lub robota, który posiada silniki o stosunkowo
małym poborze prądu.
Ważne jest by kupić układ L293D … literka D w jego nazwie oznacza iż posiada on już
5/12/2018 budujemy robota cz_1 - slidepdf.com
http://slidepdf.com/reader/full/budujemy-robota-cz1 2/6
wbudowane diody zabezpieczające i upraszcza konstrukcję.
Kilka kondensatorów troszkę przewodów :-).
Części niezbędne do wykonania płytek możemy kupić praktycznie w każdym sklepie
elektronicznym.
Między innymi:
www.sklep.avt.plwww.piekarz.pl
www.tme.pl
Przystępujemy do pracy.
Płytkę procesora należy starannie polutować. By uniknąć kłopotów błędnym działaniem.
Lutowanie zawsze zaczynamy od wlutowania elementów takich jak zworki, rezystory itp.
Następnie lutujemy większe elementy jak podstawki, elementy dyskretne itd.
Na koniec uruchamiamy płytę stosując starą zasadę „na sucho” to znaczy bez procesora. I
sprawdzamy miernikiem czy napięcia zasilające znajdują się tam gdzie powinny i są prawidłowe.
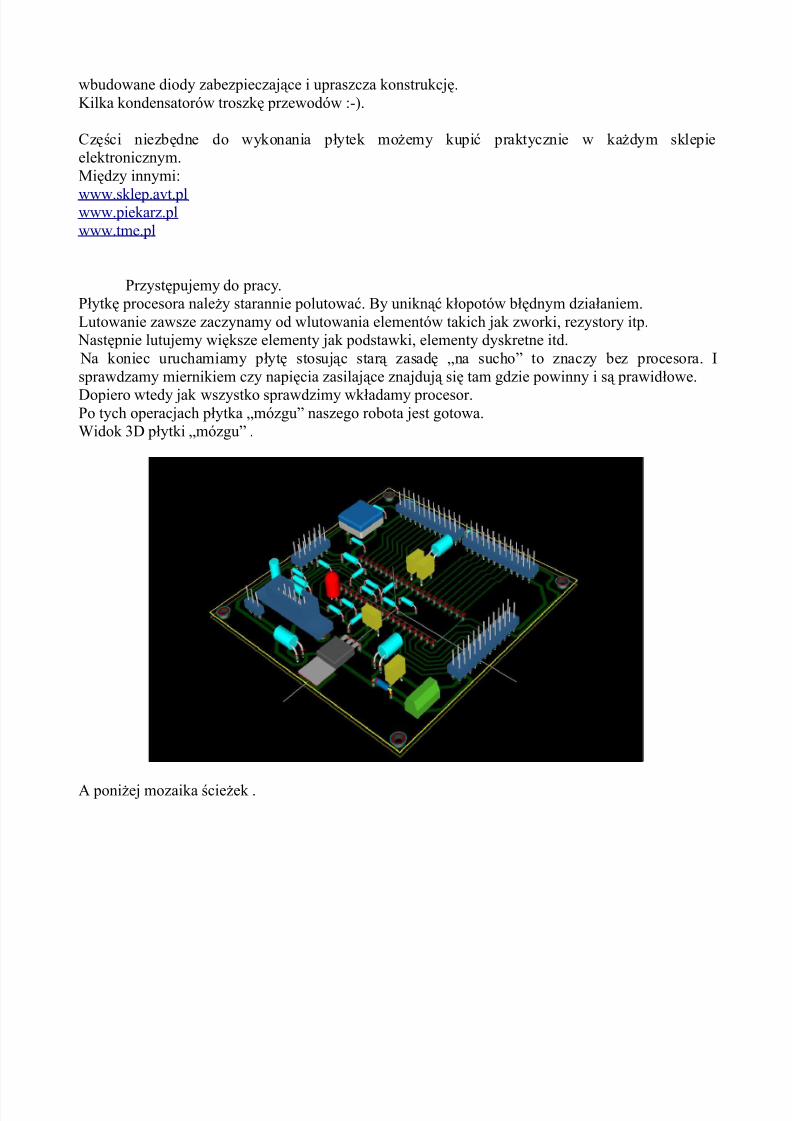
Dopiero wtedy jak wszystko sprawdzimy wkładamy procesor.Po tych operacjach płytka „mózgu” naszego robota jest gotowa.
Widok 3D płytki „mózgu” .
A poniżej mozaika ścieżek .

5/12/2018 budujemy robota cz_1 - slidepdf.com
http://slidepdf.com/reader/full/budujemy-robota-cz1 3/6
Jak widać na powyższych obrazkach płytka jest prosta . Zawiera sporą ilość zworek (oznaczenie Z)
lecz dzięki temu nie jest wymagana wersja 2 stronna .
Pliki dostępne będą pod adresem :
…..........................................................................................
Płytki wykonane są w darmowym programie KiCad można pobrać z tego adresu :
http://kicad.sourceforge.net/wiki/index.php/PL:Main_Page
Wykaz elementów do płytki :
– ATMEGA 16 obudowa DIP
– podstawka 40 nóżkowa pod procesor
– Dioda dowolna o prądzie dopuszczalnym minimum 2A
– 3x 100nF/63V
– 1000uF/16V
–
2x 100uF/6,3V – 470uF/6,3V
– 4,7k / 0,125W
– 1k / 0,125W
– 390 /0,125W
– LED – dowolna dioda LED 5mm
– LM1117 -5V - stabilizator 5V LOWDROP w obudowie TO220
– srebrzanka (do wykonania zworek)
– gniazda na złącza „szpilkowe” można kupić długie i dociąć na odpowiednią ilość styków
– złącze 10 pin (ISP) dowolne , może być w obudowie zabezpieczającej przed odwrotnym
podłączeniem. – JP1 zworka
– Przycisk START – dowolny przycisk NO (normalnie otwarty)
5/12/2018 budujemy robota cz_1 - slidepdf.com
http://slidepdf.com/reader/full/budujemy-robota-cz1 4/6
Do dalszych prac związanych z tym modułem niezbędne będzie również zainstalowanie w
komputerze oprogramowania AVRStudio oraz pakietu WinAvr .
Linki do tych programów :
http://www.atmel.com/dyn/Products/tools_card.asp?tool_id=2725
http://winavr.sourceforge.net/
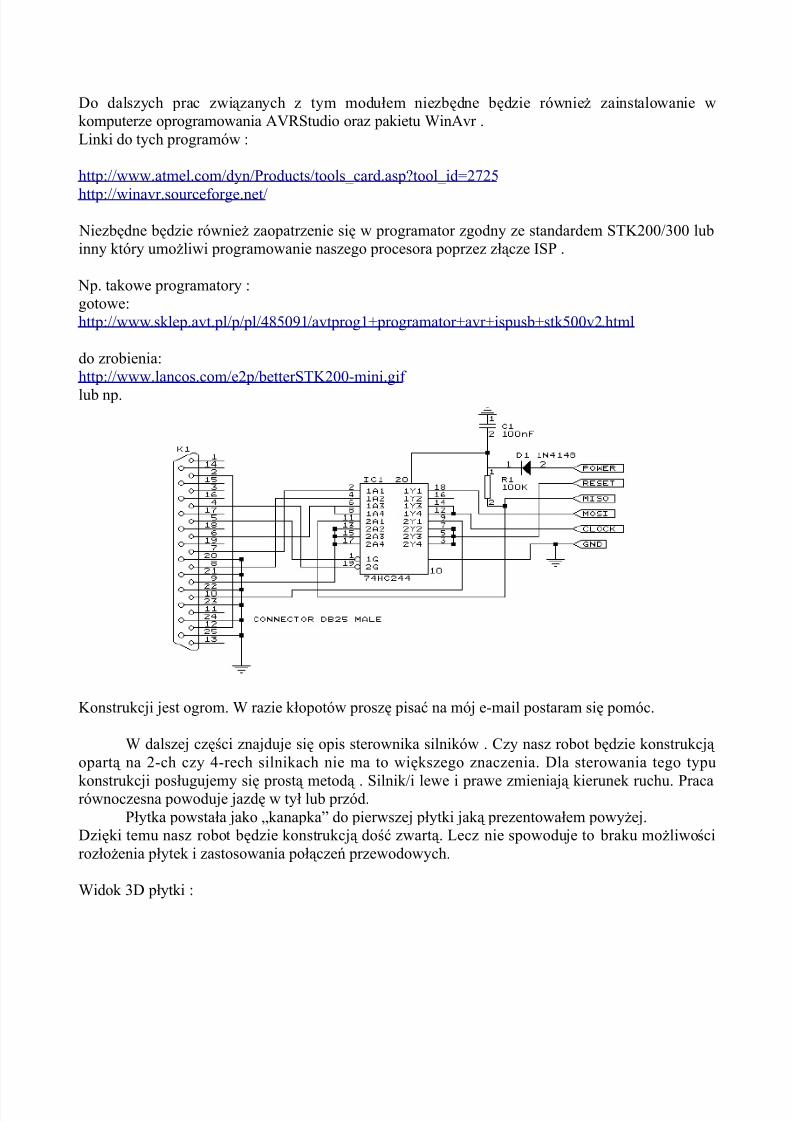
Niezbędne będzie również zaopatrzenie się w programator zgodny ze standardem STK200/300 lub
inny który umożliwi programowanie naszego procesora poprzez złącze ISP .
Np. takowe programatory :
gotowe:
http://www.sklep.avt.pl/p/pl/485091/avtprog1+programator+avr+ispusb+stk500v2.html
do zrobienia:
http://www.lancos.com/e2p/betterSTK200-mini.gif
lub np.
Konstrukcji jest ogrom. W razie kłopotów proszę pisać na mój e-mail postaram się pomóc.
W dalszej części znajduje się opis sterownika silników . Czy nasz robot będzie konstrukcją
opartą na 2-ch czy 4-rech silnikach nie ma to większego znaczenia. Dla sterowania tego typu
konstrukcji posługujemy się prostą metodą . Silnik/i lewe i prawe zmieniają kierunek ruchu. Pracarównoczesna powoduje jazdę w tył lub przód.
Płytka powstała jako „kanapka” do pierwszej płytki jaką prezentowałem powyżej.
Dzięki temu nasz robot będzie konstrukcją dość zwartą. Lecz nie spowoduje to braku możliwości
rozłożenia płytek i zastosowania połączeń przewodowych.
Widok 3D płytki :

5/12/2018 budujemy robota cz_1 - slidepdf.com
http://slidepdf.com/reader/full/budujemy-robota-cz1 5/6
Poniżej mozaika ścieżek :
Podczas składania obowiązują te same zasady co przy pierwszej płytce.
Wykaz elementów :
– L293D
–
S1, S2 – złącza silników dowolne (równie dobrze można wyprowadzić przewody) – 1000uF/16V
– 2x 100nF/63V
5/12/2018 budujemy robota cz_1 - slidepdf.com
http://slidepdf.com/reader/full/budujemy-robota-cz1 6/6
– srebrzanka na zworki (0,8mm średnicy)
– złącza szpilkowe długie (im dłuższe tym lepiej) można również płytki łączyć przewodami.
W razie pytań proszę pisać na mój e-mail : [email protected] lub [email protected]
Co dalej …
W następnej części pokażę zdjęcia gotowych modułów podam także informacje dotyczące budowy
bardzo ważnego modułu czujników.Będzie to następny element naszej kanapki.
Podam także informacje dotyczące instalacji pakietu programów podanych w tym odcinku.
Zaczniemy pisać szablon programu oraz zobaczymy pierwsze efekty poprawnej pracy dotychczas
skonstruowanej części robota.
Będę wdzięczny za wszelkie sugestie dotyczące dalszego rozwoju projektu. Jakie pomysły
mielibyście na wygląd konstrukcji. Jak widać celowo nie umieszczałem zdjęć tego jak według mnie
ma wyglądać. Pozwalam Czytelnikom samym wybrać ich własny styl..