Embed Size (px)
Citation preview
Sebenta da Disciplina RM-LEG, Zuzana Dimitrovová, DEC/FCT/UNL, 2018
Cap. 2. Deformação
1. Deslocamento
2. Gradiente dos deslocamentos
2.1 Translação, rotação e deformação da vizinhança elementar
3. Tensor das pequenas deformações
3.1 Teoria geometricamente linear
3.2 Significado físico das pequenas deformações
3.2.1 Variação relativa do comprimento (Extensão)
3.2.2 Variação angular do ângulo (Distorção)
3.3 Representação geométrica no quadrado elementar unitário
4. Deformação volúmica
5. Medição das deformações: extensómetros, rosetas
6. Equações de compatibilidade
7. Forma matricial das equações introduzidas
8. Estados de deformação
9. Vector das deformações

Sebenta da Disciplina RM-LEG, Zuzana Dimitrovová, DEC/FCT/UNL, 2018
A deformação é uma das repostas do meio contínuo ao carregamento. A sua introdução e
definição não é fictícia como no caso das tensões, porque é possível medi-la e visualizá-la.
A aplicação do carregamento causa que cada vizinhança em torno de um ponto interior do meio
contínuo muda:
- a sua posição através da translação e rotação do “corpo rígido”
- o seu volume representado pela parte volúmica do tensor das deformações (definido neste
capítulo)
- a sua forma representada pela parte desviadora do tensor das deformações (definido neste
capítulo)
1. Deslocamento
O deslocamento do ponto P do meio contínuo, define-se como o vetor que liga a posição inicial
desse ponto P com a sua posição final P , ou seja, com a posição onde o ponto se encontra
depois da aplicação do carregamento. Tal como a definição de um vetor permite, é suficiente
identificar a posição do ponto P , inicial e final, e não é necessário introduzir uma vizinhança em
torno do ponto P .
O campo de deslocamento é “visível”, porque pode-se medir pelo menos nos pontos de
superfície do meio contínuo.
Introduz-se a designação ( ), ,T
u u v w= para evitar índices. Salienta-se que é necessário ter
cuidado, e de contexto, distinguir o vetor de deslocamento u da sua primeira componente u .
2. Gradiente dos deslocamentos
Figura 1

Sebenta da Disciplina RM-LEG, Zuzana Dimitrovová, DEC/FCT/UNL, 2018
O gradiente dos deslocamentos M define-se usando pontos vizinhos na posição original e
final (deformada).
Na figura 1, representa-se um corpo na sua posição inicial (à esquerda) sem o carregamento
aplicado. Escolhem-se 2 pontos vizinhos de maneira que o ponto Q esteja contido na
vizinhança elementar do ponto P . No entanto, para uma melhor visualização os dois pontos
representam-se bastante afastados. Após a aplicação do carregamento, o corpo muda a sua
posição, o seu volume e a sua forma. O mesmo é válido para cada vizinhança elementar, assim,
após a aplicação do carregamento, os pontos P e Q encontram-se nas novas posições,
designadas P e Q .
O vetor que liga os dois pontos P e Q designa-se ( ), ,T
s x y z = e as suas
componentes são dadas por Q Px x x = − ,
Q Py y y = − , Q Pz z z = − . De acordo com a
definição do deslocamento, Pu P P= − e
Qu Q Q= − . Fazendo uma paralela ao vetor Pu que
passa pelo ponto Q , observa-se facilmente da figura acima, que a variação do deslocamento
u , pode-se escrever como
u s s = −
ou seja
s s u = +
Diz-se que não há deformação quando s s é verdadeiro para qualquer escolha dos
pontos P e Q . Neste caso, apenas pode existir o movimento do corpo rígido. No entanto, não
se pode concluir diretamente que neste caso se trata do corpo rígido; isso apenas seria possível
se não ocorrerem deformações para qualquer carregamento.
Em seguida aproxima-se a variação do deslocamento. Tal como no capítulo anterior, para esta
aproximação usa-se o primeiro termo da expansão de Taylor. A variação efetua-se ao longo de
uma direção arbitrária, e não como no capítulo anterior, apenas na direção do eixo cartesiano.
Por esta razão é necessário efetuar as três derivadas parciais em cada componente, ou seja
u u uu x y z
x y z
= + +
e analogamente
v v vv x y z
x y z
= + +
,
w w ww x y z
x y z
= + +

Sebenta da Disciplina RM-LEG, Zuzana Dimitrovová, DEC/FCT/UNL, 2018
Na forma matricial por isso
s s u s M s = + = +
em que M se designa o gradiente dos deslocamentos.
u u u
x y z
v v vM
x y z
w w w
x y z
=
O gradiente dos deslocamentos é um campo tensorial de segunda ordem, porque de acordo
com a lei do quociente, as suas componentes são obtidas pelas derivadas de um campo vetorial,
ou seja, tensorial de primeira ordem.
É importante realçar que na expansão de Taylor foram utilizados apenas os dois primeiros
termos (constante e linear) e os outros foram desprezados. É possível estabelecer teorias mais
exatas, envolvendo mais termos nesta expansão.
2.1 Translação, rotação e deformação da vizinhança elementar
Para identificar a deformação numa vizinhança elementar, é necessário remover a translação e
a rotação do corpo rígido, deixando assim apenas a variação de forma e de volume. Isso pode-se
fazer do seguinte modo:
( ) ( ) ... V Ds I s M s I s I s = + + + + = + + +
Define-se como o tensor das deformações, a parte simétrica do gradiente dos deslocamentos,
ou seja
( ) / 2TM M = +
e como o tensor das rotações a parte antissimétrica do gradiente dos deslocamentos, ou seja
( ) / 2TM M = −

Sebenta da Disciplina RM-LEG, Zuzana Dimitrovová, DEC/FCT/UNL, 2018
1 1 1 10
2 2 2 2
1 10
2 2
u u v u w u v u wu u ux y x z x y x z xx y z
v v v v v w v w
x y z y z y z y
w w w w antissim
x y z z
+ + − − = + + −
0sim
Voltando às equações acima, o movimento do corpo rígido representa-se pela translação, I , e
pela rotação . A deformação envolve a variação de volume, V que corresponde à
parte volúmica do tensor e a variação de forma, D que corresponde à parte desviadora
do tensor . Neste caso, o tensor chama-se o tensor das pequenas deformações.
3. Tensor das pequenas deformações
O tensor das pequenas deformações, depende linearmente nas componentes de gradiente dos
deslocamentos. Por isso, o tensor das pequenas deformações é possível usar sempre, quando os
termos do gradiente dos deslocamentos são pequenos, ou seja, quando 1 ,ijM i j .
As componentes do tensor das deformações não têm unidade, como se pode concluir da sua
definição. Visto que na teoria das pequenas deformações os valores costumam ser bastante
pequenos, usa-se o prefixo 610 −= para aumentar a grandeza do número. Salienta-se que
não é unidade e lê-se como “micro”.
3.1 Teoria geometricamente linear
O tensor das pequenas deformações é uma função linear em termos de gradiente dos
deslocamentos, ou seja, uma função linear em derivadas de componentes do vetor dos
deslocamentos. Esta linearidade designa-se linearidade geométrica ou cinemática. Usa-se
também o termo “a teoria das pequenas deformações”.
Nota-se que as pequenas deformações não impedem deslocamentos grandes. Por exemplo, o
movimento do corpo rígido pode representar deslocamentos grandes, no entanto, o tensor das
deformações é nulo. Define-se por isso também “a teoria dos pequenos deslocamentos”. A
teoria dos pequenos deslocamentos implica a teoria das pequenas deformações, mas não vice-
versa. Na teoria dos pequenos deslocamentos, não se costuma distinguir a forma do corpo
original da deformada, quer para a determinação das propriedades, ou para escrever as
condições de equilíbrio. Salienta-se que isso já foi utilizado nas disciplinas anteriores em que se
determinavam as reações das estruturas reticuladas, ou seja, as equações de equilíbrio
escreveram-se na posição indeformada da estrutura.

Sebenta da Disciplina RM-LEG, Zuzana Dimitrovová, DEC/FCT/UNL, 2018
Implementando esta restrição, não se conseguem analisar outros fenómenos como por
exemplo, a instabilidade. Usam-se por isso os termos “a teoria de 1ª ordem” e “a teoria de 2ª
ordem”. Na teoria de 2ª ordem, as equações de equilíbrio escrevem-se admitindo a forma
deformada do corpo. Note-se que a palavra “deformada” não corresponde ao termo
“deformação”. O corpo na posição deformada corresponde ao corpo constituído pelos pontos
na sua posição final, ou seja, aplicando o campo dos deslocamentos. Visto que os pontos de
superfície se mantém na superfície após a aplicação do carregamento e o corpo se mantém
contínuo, a posição deformada pode-se obter usando a posição “deslocada” de superfície,
aplicando o vector dos deslocamentos a cada ponto de superfície.
3.2 Significado físico das pequenas deformações
4.3.1 Variação relativa do comprimento (Extensão)
As componentes normais do tensor das pequenas deformações (x ,
y , z ) chamam-se
extensões. O significado físico representa a variação relativa de um comprimento infinitesimal,
nomeadamente num dado ponto P , P
x identifica a variação relativa do comprimento de uma
fibra elementar paralela ao eixo x . O valor positivo corresponde ao alongamento, e o valor
negativo ao encurtamento. Tal como no caso das tensões, o sinal da componente normal não
depende do referencial.
Na realidade, na teoria dos pequenos deslocamentos, na enumeração da variação relativa do
comprimento, usa-se o comprimento projetado à direção original, tal como especifica a
derivada x
u
x
=
. Em mais pormenores:
Figura 2
Na figura 2 representa-se a posição inicial da fibra infinitesimal na direção do eixo cartesiano x ,
identificada pelos pontos próximos P e Q , e assume-se que o seu comprimento L é
infinitesimal. A variação relativa da distância destes pontos após a deformação PQ é L
L
.
Pode-se provar que x
u L
x L
=
e assim, confirmar o significado físico descrito acima.
Prova:

Sebenta da Disciplina RM-LEG, Zuzana Dimitrovová, DEC/FCT/UNL, 2018
De acordo com a definição
0limP
xPQ
P
u P Q PQ
x PQ
→
−= =
Pretende-se provar que:
0 0lim limPQ PQ
P Q PQ P Q PQ
PQ PQ→ →
− −
Assumiu-se que:
( ),0,0s x = , L s x= =
Por isso, a expressão acima pode-se escrever como
s s s xP Q PQ
s xPQ
− − −= =
Usando a definição do tensor das pequenas deformações
2 2 2
2 22 2T
xs s s x s s x − = − = =
e voltando à expressão anterior
2 22 2
21 1 1 1 1 1
s s xs x s
x x x x
− − = − − + − = + −
Substituindo
22
22
2 2
21 1 1 1 2 1 1 2 1 1 1 1x
x x x x x
s x x
x x
− + − = + − = + − + + − = + − =
Usando agora a definição
x
u
x
=
pode-se concluir que a variação do comprimento de uma fibra de comprimento finito paralela
ao eixo x é dada por

Sebenta da Disciplina RM-LEG, Zuzana Dimitrovová, DEC/FCT/UNL, 2018
( )0 0, ,f
i
x
x f ix
L x y z dx u u = = −
onde 0 0,y z identificam a sua posição em relação aos outros eixos cartesianos. Ou seja, sabendo
os deslocamentos horizontais dos pontos nas extremidades, é possível simplesmente subtraí-
los. Não sabendo estes deslocamentos, é necessário efetuar a integração em função de x .
Analogamente para fibras paralelas aos outros eixos cartesianos.
No caso de distribuição uniforme de deformações:
f f
i i
x x
x x xx x
L dx dx L = = =
ou seja, pode-se generalizar que L
L
= , L L = , ( )1L L L L = + = +
4.3.2 Variação do ângulo
As componentes tangenciais do tensor das pequenas deformações chamam-se distorções e
correspondem às variações angulares dos ângulos.
Assume-se um ângulo delimitado pelas semirretas identificadas pelos versores unitários Ar
e Br . Pode-se provar que
( )2 cos
sin
A B
T
A B r rr r
− + =
Quando o ângulo é originalmente reto, a fórmula simplifica-se para
2T
A Br r =
Por exemplo em 2D, alinhando as semirretas com o referencial cartesiano
( )1,0T
Ar = , ( )0,1T
Br =
2 2T
A B xyr r = =
E por isso, o dobro da componente tangencial representa a variação angular do ângulo
originalmente reto. Por esta razão, e outras vantagens que serão abordadas no próximo
capítulo, introduz-se a distorção de engenharia, 2xy xy
u v
y x
= = +
.

Sebenta da Disciplina RM-LEG, Zuzana Dimitrovová, DEC/FCT/UNL, 2018
Figura 3
Aproximando as derivadas pelas variações, tan tanxy
u v
y x
+ + +
de acordo
com Figura 3. Para eliminar as componentes normais do tensor das deformações, no esboço da
Figura 3 assumiu-se que as fibras paralelas aos eixos cartesianos não sofrem alongamentos. Da
Figura 3 pode-se facilmente concluir, que xy = + corresponde à variação total do ângulo
formado pelos eixos cartesianos, como já dito anteriormente, e que a distorção positiva diminui
o ângulo, e a distorção negativa aumenta-o.
Em resumo tem significado físico de variação angular do ângulo originalmente recto.
3.3 Representação geométrica no quadrado elementar unitário
Figura 4
Na figura 4 podem-se identificar os seguintes passos:

Sebenta da Disciplina RM-LEG, Zuzana Dimitrovová, DEC/FCT/UNL, 2018
O retângulo elementar desloca-se da sua posição inicial (cinzento) e deforma-se para ocupar a
sua posição final (vermelho). Os pontos que designam os vértices na posição inicial: , , ,A B C D
ocupam na posição deformada posições , , ,A B C D . Para simplificar, não se apresenta a
análise do ponto D .
Ao longo desta mudança, o retângulo sofre a translação (verde), a rotação (azul) e a deformação
(vermelho). A rotação deve assegurar que os ângulos no vértice A são iguais. A translação e a
rotação correspondem ao movimento do corpo rígido, ou seja, o retângulo não altera nem a sua
forma nem o seu volume. A deformação poder-se-ia separar na parte volúmica (alteração do
volume) e desviadora (alteração de forma), mas neste momento isso não é importante. Na
teoria dos pequenos deslocamentos, as alterações de deslocamento são pequenas e podem-se
aproximar pelas primeiras derivadas. Já foi explicado no capítulo anterior, que, quando a
alteração se efetua somente na direção de um eixo cartesiano, a derivada efetua-se apenas
segundo esta variável.
Pode-se facilmente concluir que no caso dos lados infinitesimais, mas unitários, os
deslocamentos dos vértices que definem a forma deformada, correspondem diretamente às
deformações, porque L L = = como 1L = . Na visualização das deformações retira-se
assim a parte de movimento do corpo rígido, ou seja, A A= e o retângulo representado a azul
roda-se para que os lados coincidam com o referencial. Assumindo ainda os lados unitários,
pode-se concluir que a visualização das deformações no quadrado elementar unitário obedece
às regas da Figura 5, onde se assume que 0y .
As fórmulas para esta representação escrevem-se
x xyu x y = + e y xyv y x = +
e poder-se-iam deduzir pela integração do campo de
deformações uniforme.
Figura 5
4. Deformação volúmica
A representação das deformações em 2D é relativamente fácil, no entanto em 3D apresentava
complicações desnecessárias. Mas, no referencial principal, onde as distorções são nulas, pode-
se identificar a variação de volume do seguinte modo: assume-se um paralelepípedo elementar
de lados paralelos aos eixos principais. O volume inicial do paralelepípedo é V x y z= e o
volume após a deformação é
( )( )( )
( )
1 2 3
1 2 3 1 2 1 3 2 3 1 2 3
1 1 1
1 2 2 2
V x y z
x y z
= + + +
= + + + + + + +

Sebenta da Disciplina RM-LEG, Zuzana Dimitrovová, DEC/FCT/UNL, 2018
Desprezando os termos de ordem maior, a variação do volume é
( )
( )
1 2 3 1 2 1 3 2 3 1 2 3
1 2 3 1
2 2 2V V V x y z
V I V
= − = + + + + + +
+ + =
onde 1I é o primeiro invariante fundamental do tensor das deformações. Sendo o invariante,
pode-se concluir que o mesmo resultado seria obtido no referencial arbitrário e que a definição
da deformação volúmica é
1 2 3V x y z = + + = + +
O que está em conformidade com o facto de que as variações de volume não são afetadas pelas
distorções, como especificado no início deste capítulo. Depois escreve-se
VV V = analogamente como xL L =
Recorda-se ainda que a deformação desviadora resulta em alteração de forma num volume
inalterado. Sabe-se que o traço do desviador é nulo e que mais uma vez confirma a deformação
volúmica nula.
5. Medição das deformações: extensómetros,
rosetas
As medições de deformações efetuam-se nas superfícies de componentes. Usando a
extensometria, tem que se escolher uma zona em que há deformações uniformes, porque as
várias medições efetuadas nesta zona têm que corresponder ao mesmo “ponto”. Por esta razão
os extensómetros devem-se colocar suficientemente longe de extremidades e de pontos de
aplicação de carga. O tensor de deformações em 2D tem 3 componentes diferentes e por isso é
necessário colocar pelo menos 3 extensómetros para medir 3 valores. O conjunto de 3
extensómetros forma uma roseta. Um extensómetro consegue apenas registar a variação de
comprimento e por isso mede apenas a extensão na sua direção (Figura 6).
Figura 6

Sebenta da Disciplina RM-LEG, Zuzana Dimitrovová, DEC/FCT/UNL, 2018
Os resultados das medições representam depois o problema que já foi abordado na parte de
cálculo tensorial, ou seja, determinar as componentes do tensor sabendo 3 valores normais nas
3 direções diferentes, o que se esquematiza na Figura 7.
Figura 7
Este problema resulta num sistema de 2 equações para 2 incógnitas y e
xy :
( ) ( ) ( ) ( )2 2cos sin 2 sin cosb a y xy = + +
( ) ( ) ( ) ( )2 2cos sin 2 sin cosc a y xy = + + + + + +
que se pode facilmente resolver.
Às vezes colocam-se numa roseta 4 extensómetros para reduzir os erros de medição.
6. Equações de compatibilidade
As equações de compatibilidade chamam-se também: equações de integrabilidade,
continuidade ou admissibilidade física. O problema coloca-se da seguinte maneira: Sabendo o
campo dos deslocamentos, é possível de forma inequívoca determinar o campo das
deformações pelas derivadas. No entanto, sabendo o campo das deformações, já não é possível
concluir diretamente se o campo dos deslocamentos existe. O problema está no número de
componentes, ou seja, como a deformação tem 6 componentes e o deslocamento 3, isso
significa que para determinar o campo dos deslocamentos usando o campo das deformações,
temos que resolver usando integrações 6 equações diferenciais com 6 funções de posição
conhecidas em ordem de apenas 3 funções de posição incógnitas. Este problema pode induzir
uma contradição.
Quando o campo de deslocamentos não existe, por outras palavras, quando não existe na forma
de uma função contínua, estamos perante a violação da continuidade do meio contínuo, e por
isso as designações de “continuidade” ou de “admissibilidade física”. O outro termo
(integrabilidade) está ligado à fundamentação matemática. O campo de deslocamentos
determina-se pela integração, ou seja, se existir, as equações deformação-deslocamento são

Sebenta da Disciplina RM-LEG, Zuzana Dimitrovová, DEC/FCT/UNL, 2018
integráveis de modo a permitirem a determinação do campo dos deslocamentos. Fisicamente,
quando o campo de deformações é compatível, isso significa que ao representar as formas
deformadas de todas as vizinhanças, não se formam vazios entre elas.
Diz-se que o campo de deformação é compatível quando se cumprem as condições de
compatibilidade. Estas equações são de dois tipos: no primeiro tipo há 3 equações, cada uma
num plano coordenado e no segundo tipo há 3 equações que ligam uma direção com os 3
planos coordenados. A primeira equação do primeiro grupo é
2 22
2 2
xy yx
x y y x
= +
e do segundo é
2
2yz xyx zx
y z x x y z
= − + +
Restantes equações obtêm-se pela permutação positiva de índices.
Note-se que todos os termos representam segundas derivadas, e por isso o campo de
deformação linear é sempre compatível, porque depois de duas derivadas cada termo nas
equações é nulo.
Considerando as deformações apenas em 2D, é necessário verificar apenas uma equação de
compatibilidade nesse mesmo plano. Reduzindo a 1D, não há equações de compatibilidade
porque a uma componente de deformação corresponde uma componente de deslocamento e
não existe a contradição acima referida.
7. Forma matricial das equações introduzidas
Verifica-se facilmente que as equações de equilíbrio do capítulo anterior podem-se escrever na
forma:
0f + =
Em que a matriz de operadores é ( )/ , / , /T
x y z = .
No entanto, já não é possível escrever as equações deformações-deslocamento numa forma
compacta usando a matriz de componentes . Torna-se mais vantajoso escrever as
componentes na forma vetorial e as vantagens desta formulação tornam-se ainda mais claras no
próximo capítulo. Define-se:

Sebenta da Disciplina RM-LEG, Zuzana Dimitrovová, DEC/FCT/UNL, 2018
, , , , ,T
x y z yz xz xy =
E analogamente
, , , , ,T
x y z yz xz xy =
Chama-se à atenção que a ordem das componentes de 2 índices segue a seguinte regra:
yz (falta x ), xz (falta y ), xy (falta z ). Chama-se ainda à atenção que as componentes de
deformação de 2 índices incluem a distorção de engenharia, , ou seja, o dobro da distorção,
, que é considerada como a componente tensorial. Esta forma torna-se ainda mais vantajosa
na descrição das equações constitutiva, que é o tema que será abordado no próximo capítulo.
Com esta definição as equações deformação-deslocamento escrevem-se:
T
u =
A definição de matriz de operadores pode-se facilmente deduzir
/ 0 0 0 / /
0 / 0 / 0 /
0 0 / / / 0
x z y
y z x
z y x
=
Para se manter a uniformidade nas designações, escrevem-se as equações de equilíbrio na
forma
0f + =
E o equilíbrio na fronteira, em vez de p n=
ˆp n =
Em que a matriz de componentes da normal tem a forma semelhante com a matriz de
operadores
0 0 0
ˆ 0 0 0
0 0 0
x z y
y z x
z y x
n n n
n n n n
n n n
=
Para as equações de compatibilidade, existem duas formas possíveis, no entanto nenhuma usa
matrizes de operadores já introduzidos.
Sebenta da Disciplina RM-LEG, Zuzana Dimitrovová, DEC/FCT/UNL, 2018
0T
= com
0
0
0
z y
z x
y x
−
= −
−
e 2 0 =
em que a matriz 2 é facilmente deduzível e não se vai apresentar por razões de
simplificação.
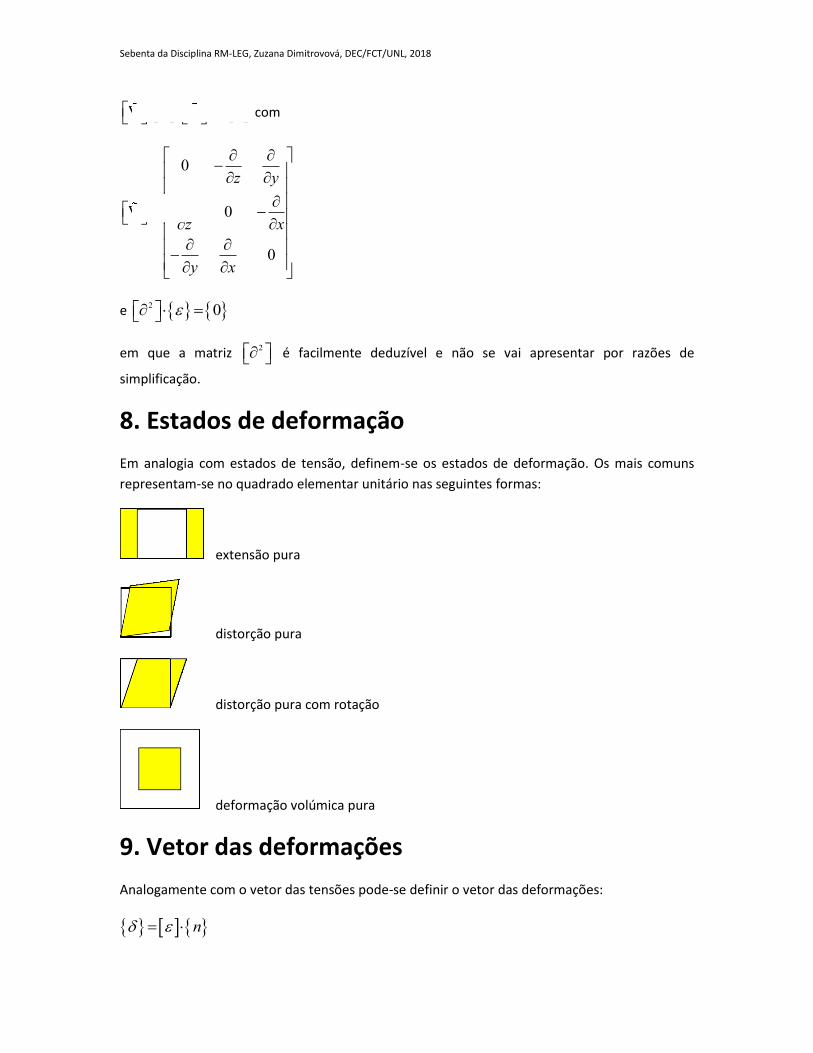
8. Estados de deformação
Em analogia com estados de tensão, definem-se os estados de deformação. Os mais comuns
representam-se no quadrado elementar unitário nas seguintes formas:
extensão pura
distorção pura
distorção pura com rotação
deformação volúmica pura
9. Vetor das deformações
Analogamente com o vetor das tensões pode-se definir o vetor das deformações:
n =

Sebenta da Disciplina RM-LEG, Zuzana Dimitrovová, DEC/FCT/UNL, 2018
A aplicabilidade desta definição é reduzida, porque não tem significado físico importante.
Usa-se componente normal intrínseca no sentido da extensão numa dada direção definida pelo
versor r
( ) T T
rr r r r = =
e a variação do ângulo originalmente reto, definido pelas semirretas cujos versores são Ar e
Br , representa a componente intrínseca tangencial
2 2A B B Ar r r r = =
Recorda-se que é necessário utilizar o dobro da multiplicação semelhante à usada na parte das
tensões, porque, devido ao significado físico, habitualmente determina-se a alteração do ângulo
completo, ou seja, o análogo da distorção.





























