Embed Size (px)
Citation preview

Capitolo 1
Regolazione PID (Proporzionale Integrale Derivativa), messa a punto dei regolatori,
verifiche sperimentali 1.1 Regolazione Il tipo di regolazione svolta dallo strumento è definita dalla relazione tra segnale in ingresso ed uscita; può essere di diversi tipi:
- A due posizioni - Proporzionale - Integrale - Derivativa
Esse possono trovarsi variamente combinate tra loro.

Capitolo 1 REGOLAZIONE PNEUMATICA
2
1.2 Regolazione a due posizioni
Si ha x = segnale della variabile controllata (segnale d’ingresso) y = segnale di uscita. Ad ogni valore desiderato di X, detto X0, corrisponde un valore di Y, detto
Y0: X < X0 ⇒ Y = Y1 con Y1 > Y0 X > X0 ⇒ Y = Y2 con Y2 < Y0 Essendo Y0 il valore che manterrebbe il segnale X0.
Fig.1 - Curva caratteristica di un regolatore a due posizioni
X
Y
Y1
Y0
Y2
X0

Capitolo 1 REGOLAZIONE PNEUMATICA
3
Fig.2 - Risposta di una strumento di regolazione a due posizioni L’ampiezza e la frequenza delle oscillazioni dipendono dalle caratteristiche del processo. La frequenza delle oscillazioni dipende principalmente dalla velocità di risposta del processo, mentre l’ampiezza è legata all’entità di: ∆Y1 = (Y1 – Y0) e ∆Y2 = (Y2 – Y0)
Variabile Controllata
Segnale di uscita %
0
100 %
Tempo
Valore X0 desiderato

Capitolo 1 REGOLAZIONE PNEUMATICA
4
Dovendo mantenere la variabile controllata attorno al valore di set point (x0) con un regolatore che può assumere solo due posizioni in uscita, si adotta la banda differenziale, x = x2-x1 entro la quale il regolatore non scatta, in modo da avere una inerzia fittizia sul sistema per ridurre la frequenza delle oscillazioni come mostrato in figura 3.
Fig.3 - Risposta di uno strumento di regolazione a due posizioni con banda differenziale
Banda differenziale
Variabile Controllata
Segnale di uscita %
0
100 %
Tempo
Valore X0 desiderato X1
X2
Y1
Y2

Capitolo 1 REGOLAZIONE PNEUMATICA
5 Fig.4 - Risposta di un processo munito di regolazione a due posizioni ad una variazione di carico. Tempo
Carico
Variabile Controllata
Segnale di uscita %
Scarto
X2
X1
Valore desiderato
Y1
Y20
100 %


Capitolo 1 REGOLAZIONE PNEUMATICA
7
A causa dell’aumento di carico (fig. 4), x diminuisce, si attesta su un valore medio minore di x0 e non oscilla più simmetricamente attorno al set point, poiché in fase di apertura il flusso agente eccede di poco il flusso strettamente necessario e quindi la variabile impiega un tempo relativamente lungo a risalire, mentre in fase di chiusura la perdita di energia è più sensibile per cui la variabile scende più rapidamente. La regolazione a due posizioni si usa quando le oscillazioni non sono dannose (addirittura, se sono interne alla x, non succede nulla).
La banda differenziale viene scelta tra lo 0,1% e 2% del campo di regolazione considerando un sistema con buone caratteristiche di reattività. Regolazione pneumatica: sistema ugello – paletta
Con questo paragrafo si vogliono descrivere i principi di funzionamento degli strumenti pneumatici che realizzano le varie azioni regolatrici. Consideriamo il sistema schematicamente rappresentato in figura 5 comunemente chiamato sistema ugello paletta.
Fig.5 – Sistema ugello-paletta per la regolazione pneumatica
Esso è costituito da un tubo in cui scorre aria compressa. Il flusso dell’aria
compressa proveniente da sinistra passa attraverso una restrizione R ed esce dall’ugello B. All’uscita dell’ugello esso incontra una lamina o una paletta mobile F che ne ostacola più o meno il deflusso in relazione alla sua maggiore o minore

Capitolo 1 REGOLAZIONE PNEUMATICA
8
vicinanza alla sezione di uscita dell’ugello. La posizione della lamina varia in funzione della risposta dell’elemento sensibile della misura.
Nel caso in cui la lamina ostruisca completamente l’ugello, si annulla il flusso di aria nel tubo ed i due manometri M1 ed M2 segneranno una stesso valore di pressione P1 = P2. Nel caso opposto in cui la lamina non ostruisca affatto il flusso di aria uscente dall’ugello, il manometro M2 segnerà una pressione P’2 inferiore a P1, essendo la differenza P1 – P’2 pari alla perdita di carico provocata dalla restrizione R. In ogni caso intermedio in cui la lamina ostacoli l’uscita dell’aria, si creerà una perdita di carico localizzata all’uscita dell’ugello, per cui il manometro M2 misurerà una pressione P”2 compresa tra i valori P2 e P’2. Consideriamo ad esempio il caso in cui la posizione della lamina rispetto all’ugello sia tale per cui la sezione di efflusso all’uscita dell’ugello, uguagli la sezione di passaggio nella restrizione R.
In questo caso si ha
dove dR e dB sono i diametri della restrizione e dell’ugello, mentre s è la
distanza della lamina dall’ugello. Con ciò si è ammesso di poter considerare lo spostamento davanti all’ugello come una traslazione orizzontale anziché una rotazione intorno al fulcro H. Con questa semplificazione e supponendo che le perdite di carico attraverso i due passaggi di uguale sezione siano uguali, ne deriva che per il valore di s che risolve l’equazione, si ha: P1 – P2 = P2 – P0, dove P0 è la pressione esterna.
Supponendo P0 = 0. si ha:
ma se ad esempio
si può notare come per un tale valore di s la pressione dimezza. La figura 6 mostra l’andamento della pressione P2 nella zona compresa tra la restrizione e l’ugello in funzione della distanza tra quest’ultimo e la lamina. In ciò si suppone costante la pressione P1 a monte della restrizione.
sddB
R ππ
=4
2
2PP 1
2 =
mm5,0dB =mm2,0dR = mm02,0s =⇒

Capitolo 1 REGOLAZIONE PNEUMATICA
9
Come si vede dalla figura la relazione tra distanza e pressione non è una relazione lineare e ciò rappresenta una caratteristica negativa per un elemento sensibile che deve dare in uscita un segnale proporzionale al segnale di ingresso. Ostacolo superabile facendo lavorare l’elemento in un tratto limitato della curva che possa essere assimilato con sufficiente approssimazione ad un tratto rettilineo.
Fig.6 - Relazione tra distanza della lamina dell’ugello e pressione a monte dell’ugello
Ciò riduce naturalmente l’escursione massima della lamina. In pratica i movimenti di quest’ultima vengono ristretti in un intervallo di 0,05 mm (valore
Distanza
Pressione psig
5
10
15
0,3 mm

Capitolo 1 REGOLAZIONE PNEUMATICA
10
orientativo), cui corrisponde una variazione massima di pressione di circa 1 psig, come si può notare in figura 7.
Fig.7 - Tratto approssimativamente rettilineo della curva di un elemento ugello-paletta
Si sfrutta il tratto con p compreso tra 2 e 3 psi e s= 0,075 …. 0,125 mm. Dato che sulle valvole regolatrici pneumatiche la pressione di comando varia p=3…15 psi bisogna amplificare il segnale e per questo viene utilizzato il relay pneumatico.
Pressione psig
Distanza mm
2,0
2,5
3,0
0,075 0,100 0,125

Capitolo 1 REGOLAZIONE PNEUMATICA
11
Relay pneumatico
Come elemento amplificatore viene usato il relay pneumatico, la figura 8 ne illustra un esempio con incorporato l’ugello e la relativa restrizione. In esso viene alimentata aria compressa ad una pressione costante (20 psi). L’aria passa attraverso la restrizione R ed esce dall’ugello A. La valvola sferica B è collegata al diaframma C ed è contrastata dalla molla a balestra D. Un aumento della pressione a monte dell’ugello provoca una spostamento verso sinistra del diaframma e della valvola. La base conica di quest’ultima chiude lo sfogo libero E mentre la sfera si allontana dal suo seggio e lascia che l’aria di alimentazione passi attraverso il relay ed esca come segnale di uscita.
Se la pressione a monte dell’ugello diminuisce, il diaframma si sposta verso destra, la sfera ostruisce il flusso di aria di alimentazione verso l’uscita, mentre la base conica dello stelo si allontana dal seggio mettendo in comunicazione l’uscita del relay con l’esterno attraverso lo sfogo libero E. Una variazione di 0,75 psi sul diaframma è sufficiente a causare una variazione di 12 psi nella pressione di uscita che passa da 3 a 15 psig.
Fig.8 - Relay pneumatico

Capitolo 1 REGOLAZIONE PNEUMATICA
12
Sistema di regolazione a due posizioni.
Fig.9 - Sistema di regolazione pneumatica a due posizioni
L’elemento sensibile posiziona sia l’indice i che la paletta. Se l’indice si sposta rispetto al controindice, si muove l’asta 1-2 allora la paletta ruota intorno a 3 e apre o chiude la luce sull’ugello. Il relay è come un rubinetto a tre vie. Se la paletta si allontana, p1 diminuisce e la sfera sale e chiude lo sfogo libero. L’uscita è in comunicazione con l’aria compressa, che va così ad agire sulla membrana della servo valvola, spingendola a fine corsa. Se la paletta si avvicina allora p1 aumenta nel

Capitolo 1 REGOLAZIONE PNEUMATICA
13
soffietto e la sfera chiude l’alimentazione. L’uscita è in comunicazione con lo sfogo libero e la membrana della servo valvola, sotto l’azione della forza di richiamo, si porta all’estremo opposto della sua corsa. Basta un movimento piccolissimo della lamina per far variare la pressione nel soffietto dal massimo al minimo. Difficilmente sta su un valore intermedio, come avevamo ipotizzato in teoria per il relay pneumatico, ma, a causa della sensibilità, si hanno bruschi salti nel campo di variazione. E’ quindi una azione a due posizioni. 1.3 Regolazione proporzionale
Uno strumento di regolazione viene detto ad azione proporzionale quando fa corrispondere una relazione biunivoca di proporzionalità tra ingresso e uscita, allora:
con x, x0= valori istantaneo e iniziale della variabile controllata, y, y0= valori
istantaneo e iniziale della variabile in uscita. L’inclinazione della retta di lavoro dipende da K, che dà la sensibilità allo strumento, se K’< K basta una variazione
per far compiere alla valvola regolatrice una escursione completa da 0 a
100%, cioè per la stessa variazione x-x0 si ha una escursione più ampia della valvola regolatrice da Y-Y0 a Y’-Y0
( )00 XXKYY −±=
12'1
'2 XXXX −<−

Capitolo 1 REGOLAZIONE PNEUMATICA
14
Fig10 - Variazione di inclinazione della retta di lavoro di un regolatore proporzionale
Se poniamo
per la retta con K’ si ha
posto
12
0
XXXXe−−
−=100YP =
100YP 0
0 =
'1
'20
0
XX100
XXY'Y'K
−=
−−
=
12
'1
'2
XXXXb
−−
=
X2
X1
X
X0
0 % Y0 Y 100 %
Valore della variabile
Apertura della valvola
Retta di lavoro (K)
K’ < K
X’1
X’2
Y’

Capitolo 1 REGOLAZIONE PNEUMATICA
15
sostituendo si ottiene
La b (banda proporzionale) rappresenta il rapporto tra la variazione della
variabile controllata, per cui si ha lo 0-100% della valvola regolatrice e la differenza tra i valori massimo e minimo misurabili dallo strumento X2-X1. Se b è maggiore del 100% allora la valvola regolatrice non raggiunge mai la completa apertura o chiusura. Se b è molto elevato, a parità di ∆X si ha un minore ∆Y. Quindi b è un indice di sensibilità dello strumento. Se b diminuisce la sensibilità aumenta, se b diminuisce di molto si cade nello strumento a due posizioni. La velocità di spostamento della valvola di regolazione dipende dalla velocità di variazione della variabile secondo la seguente formula:
Nella figura 11 è illustrato l’andamento della curva di risposta di un
regolatore proporzionale per due variazioni della variabile controllata nel caso ideale di un regolatore che agisca fedelmente secondo l’equazione:
senza ritardi. Con un segnale di ingresso (errore) sinusoidale, l’uscita dello strumento risulta direttamente proporzionale ed in fase con l’errore. Per ogni altro tipo di variazione dell’errore, il segnale di risposta dello strumento può essere calcolato tramite le due ultime equazioni scritte.
bePP 0 +=
dtde
b1
dtdp
=
bePP 0 +=

Capitolo 1 REGOLAZIONE PNEUMATICA
16
Fig. 11 - Risposta di uno strumento di regolazione ad azione proporzionale
Tempo
Errore
Velocità di spostamento della valvola
Apertura della valvola

Capitolo 1 REGOLAZIONE PNEUMATICA
17
Sistema di regolazione proporzionale
Fig.12 - Sistema di regolazione pneumatico ad azione proporzionale Rispetto allo strumento a due posizioni c’è in più il soffietto B, su cui agisce
la pressione di uscita, che viene così riportata sulla paletta. Il punto 3 non è più fisso. Se cala la temperatura la paletta si allontana, la pressione all’ugello diminuisce e la sfera sale, allora p di uscita aumenta e il soffietto si oppone al movimento della

Capitolo 1 REGOLAZIONE PNEUMATICA
18
paletta, che si ferma quando il segnale di ingresso e la retroazione sono in equilibrio. La pressione in uscita è proporzionale al segnale di ingresso, infatti:
rotazione attorno a C:
Rotazione attorno ad I:
Se la valvola di regolazione funziona nel campo di rettilineità della figura 6,
la pressione all’ugello risulta proporzionale allo spostamento - Xn del punto N, dove il segno meno tiene conto del fatto che la pressione diminuisce quando lo spostamento Xn aumenta; visto che il relay non fa altro che amplificare questa pressione moltiplicandola per un coefficiente di amplificazione costante, anche la pressione di uscita pu risulta proporzionale allo spostamento – Xn; si può quindi scrivere:
Dove m ed n sono caratteristiche del sistema (m = Pu per Xn = 0 ed n è il
coefficiente angolare della retta). Per il soffietto B vale F= -KXc dove K è la costante di elasticità della molla opposta, allora -KXc = APu, (A=superficie del soffietto); sostituendo si ottiene che Pu=m-nγXi+nδApu/K ⇒
Da cui risulta ch segnale di uscita Pu risulta legato al segnale di ingresso Xi da
una relazione di proporzionalità.
CIX
CNX inc =
NIX
CIX nic =
CICN
=γCINI
=δcinincn XXXXX δ+γ=+=⇒
nu nXmP −=
AnKKXn
AnKmKP i
u δ−γ
−δ−
=

Capitolo 1 REGOLAZIONE PNEUMATICA
19
Spostando la posizione di C lungo la paletta varia la sensibilità, se C va in alto allora CI cala e CN cresce, quindi γ cresce e δ cresce ⇒ sensibilità cresce e b cala.
Comportamento di un sistema proporzionale.
Fig.13 - Controllo automatico della temperatura di un fluido in uscita da uno scambiatore di calore.
Nello scambiatore si scalda il fluido A con il fluido B (TA < TB). Il regolatore C deve mantenere costante la temperatura (variabile controllata) di A, regolando opportunamente la portata di B (essendo costante quella di A) con la valvola regolatrice.
( ) ( )BUIIUA pBBBAAAp cQQc θθθθ −=−
C

Capitolo 1 REGOLAZIONE PNEUMATICA
20
Dato quindi che la temperatura aumenta se aumenta la portata di B allora la curva di carico del processo (in questo caso una retta) mi dà un bilancio energetico
Fig.14 – Condizioni di funzionamento di un sistema secondo i dati di progetto
θ2= temperatura di uscita con p=100%, mentre θ1 con p=0%. Di solito si pone:
θ0 = (θ2 + θ1)/2 come set point, che corrisponde a p=0,5.
H
ϑ1
Retta di lavoro
Retta di carico
Temperatura
Apertura valvola
1 0 0,5
Indi
ce
Con
troin
dice
ϑ2
ϑ0

Capitolo 1 REGOLAZIONE PNEUMATICA
21
Se lo strumento ha sensibilità b=1 allora la retta di lavoro e di carico si incontrano in H che è il punto di funzionamento.
Partendo dalle condizioni di funzionamento della Fig.14, supponiamo di voler
cambiare il valore desiderato della variabile da θ0 a θ’>θ0 (vedi Fig.15).
Fig.15 – Variazione del valore desiderato della variabile. Dalla retta di carico si ricava il nuovo grado di apertura della valvola
necessario per mantenere la temperatura di uscita del fluido riscaldato sul nuovo valore θ’. La retta di lavoro dello strumento ci dà inoltre la deviazione fra indice e
H’
H
ϑ1
Retta di carico
Temperatura
Apertura valvola
1 0 0,5
Indi
ce
Con
troin
dice
ϑ2
ϑ0
ϑ’1
ϑ’2
ϑ’
ϑ’0
ϑ”

Capitolo 1 REGOLAZIONE PNEUMATICA
22
controindice necessaria per ottenere il nuovo grado di apertura della valvola. Come risulta dalla figura essa è data da θ0 - θ’’. Per ottenere che lo strumento di controllo dia in uscita il segnale corrispondente alla nuova apertura della valvola occorre quindi portare il controindice su un valore θ’0 che differisca dal nuovo valore desiderato della variabile della quantità θ0 - θ’’.
Ciò equivale a una traslazione uniforme della retta di lavoro la quale deve inoltre passare per il nuovo punto di equilibrio H’ del sistema.
Lo spostamento della retta di lavoro comporta una nuova corrispondenza fra valore della variabile e apertura della valvola regolatrice. Ciò viene ottenuto negli strumenti di controllo spostando il controindice sulla scala graduata.
La nuova condizione di funzionamento è rappresentata nella Fig.15. Lo scarto θ’0 - θ’ fra indice e controindice produce nello strumento un segnale di uscita corrispondente all’apertura della valvola richiesta dal nuovo punto di equilibrio H’.
Se si volesse riportare l’indice e il controindice sul valore θ’, occorrerebbe spostare meccanicamente il controindice e portarlo sul valore θ’, senza interessare la parte pneumatica dello strumento; è, cioè, solo una questione “estetica”.
In base alla nuova retta di lavoro, il campo di funzionamento dello strumento è cambiato passando dai limiti θ2 e θ1 ai nuovi limiti θ’2 e θ’1.
Naturalmente il sistema si trova ora a lavorare in una condizione di equilibrio con la valvola regolatrice aperta oltre la posizione intermedia per cui la possibilità di escursione dei suoi movimenti correttivi è maggiore in un senso più che nell’altro.
La sua capacità di azioni correttive è cioè maggiore nel senso della chiusura che non in quello della apertura. Questo inconveniente è la conseguenza del fatto di avere abbandonato le condizioni di progetto per le quali la valvola era stata dimensionata in modo da consentire il flusso necessario con un’apertura del 50%.
Esaminiamo ora il comportamento del sistema allorché interviene una variazione di carico.
La cosa può essere vista in modo semplice considerando il sistema della Fig.16. In esso la portata U di un liquido uscente da un serbatoio viene regolata in modo da mantenere costante il livello nel serbatoio malgrado l’ingresso I di nuovo liquido.
L’insieme del galleggiante A, del fulcro B e dei levismi relativi realizza una relazione di proporzionalità diretta fra il livello del liquido nel recipiente e la luce di passaggio della valvola C.

Capitolo 1 REGOLAZIONE PNEUMATICA
23
Supponiamo che la portata di ingresso I sia di 50 litri/sec e che la capacità di efflusso della linea di scarico sia di 50 litri/sec quando la valvola è aperta per metà. Una volta aggiustato il sistema in modo che la valvola sia aperta per metà quando il livello del serbatoio coincide con il valore desiderato,la portata di efflusso U bilancia esattamente quella di ingresso I e il livello rimane costante. Se ora, improvvisamente, viene rovesciata nel serbatoio una quantità finita di liquido, la portata di ingresso supera per un momento quella di uscita facendo salire il livello.
Ciò provoca una maggiore apertura della valvola con conseguente aumento della portata di efflusso. Quest’ultima si mantiene comunque superiore ai 50 litri/sec normali fino a che non è stata smaltita la quantità di liquido introdotta bruscamente.
Quando ciò sia avvenuto il livello ritorna a coincidere con il valore desiderato e si ristabiliscono le condizioni iniziali.
Fig.16 – Sistema di regolazione proporzionale. Il sistema di regolazione proporzionale si è così dimostrato in grado di reagire
efficacemente a una variazione improvvisa e di breve durata delle condizioni normali di processo.
Vediamo ora come si comporta lo stesso sistema nel caso in cui la variazione di carico permanga nel tempo.
Supponiamo quindi che la portata di ingresso I si porti improvvisamente da 50 a 75 litri/sec e rimanga costante su questo nuovo valore. La portata del liquido che entra è in un primo momento superiore a quella del liquido che esce. Il livello comincia quindi a salire e la valvola comincia ad aprirsi ulteriormente. Allorché il livello ha raggiunto il valore a cui corrisponde un’apertura della valvola tale da consentire una portata di efflusso di 75 litri/sec, si stabilisce l’uguaglianza fra liquido che entra e liquido che esce. Il livello,a questo punto, cessa quindi di salire e si ferma su un valore costante diverso da quello iniziale.
Valore desiderato
A B
CU

Capitolo 1 REGOLAZIONE PNEUMATICA
24
Il sistema quindi torna a regolare il processo in modo da mantenere costante la variabile controllata, ma essa rimane peraltro ferma su un valore diverso dal valore desiderato. La differenza fra i due valori dovrà essere tale da provocare un’apertura della valvola maggiorata in modo da consentire l’efflusso di una quantità di liquido pari alla nuova portata di ingresso.
In questo caso quindi, il sistema di regolazione proporzionale si è dimostrato insufficiente ad assicurare la costante coincidenza della variabile con il suo valore desiderato.
Esaminiamo ora la cosa per mezzo delle rette di lavoro e di carico partendo ancora dalle condizioni di funzionamento della Fig.14. Supponiamo che a partire da un certo istante in poi la temperatura di ingresso del fluido B di riscaldamento subisca una improvvisa diminuzione. In questo caso per ottenere una certa temperatura di uscita del fluido A è necessaria una portata maggiore della valvola regolatrice. Ciò corrisponde a una variazione della retta di carico la quale subisce una traslazione uniforme nel verso delle aperture crescenti. Il funzionamento del sistema in queste nuove condizioni è illustrato nella Fig.17.
Per effetto della variazione di carico, l’apertura della valvola del 50% non è più sufficiente a mantenere la variabile controllata sul valore desiderato. La temperatura di uscita del fluido A comincia perciò a diminuire fino a raggiungere il valore θ’ corrispondente al nuovo punto di equilibrio H’. L’indice dello strumento sulla scala graduata si allontana pertanto dal controindice di una quantità θ0 - θ’ che rimane costante finché permane invariata la variazione di carico nel processo. Si viene cioè a creare uno scarto fra il valore effettivo della variabile controllata e il valore desiderato la cui grandezza dipende, oltre che dalla entità della variazione di carico,dall’ampiezza della banda proporzionale dello strumento.

Capitolo 1 REGOLAZIONE PNEUMATICA
25
Fig.17 – Variazione di carico del processo. Nella Fig.18 è illustrato il variare dello scarto al variare della banda
proporzionale dello strumento per una variazione di carico costante.
H’
H
ϑ1
Retta di carico
Temperatura
Apertura valvola
1 0 0,5
Indi
ce
Con
troin
dice
ϑ2
ϑ0
ϑ’

Capitolo 1 REGOLAZIONE PNEUMATICA
26
Fig.18 – Variazione dello scarto al variare della banda proporzionale. Come si vede dalla figura lo scarto aumenta al crescere della banda
proporzionale. Qualora esso risulti intollerabile ai fini del processo, si può riportare la variabile sul valore originale θ0 modificando opportunamente la retta di lavoro in modo che il punto di intersezione con la nuova retta di carico si venga a trovare sul prolungamento del segmento θ0H della Fig.15.
Così facendo si ottiene un nuovo punto di equilibrio H’’ al quale corrisponde ancora il valore θ0 della variabile (vedi Fig.19).
Lo spostamento della retta di lavoro viene ottenuto spostando il controindice sulla scala graduata analogamente a quanto abbiamo già visto nel caso di una variazione del valore desiderato.
ϑ’’
ϑ2
ϑ1
ϑ’
0 0,5 1
Valore della variabile
Apertura della valvola
Retta di carico
50%
200%
100%
ϑ’’’
ϑ0

Capitolo 1 REGOLAZIONE PNEUMATICA
27
Fig.19 – Riporto dell’indice sul valore desiderato mediante spostamento del
controindice. In questo modo si ottiene che l’indice torni a coincidere col valore θ0 mentre
il controindice ne differisce della quantità necessaria per ottenere la apertura della valvola corrispondente al nuovo punto di equilibrio H’’.
Dai casi finora esaminati risulta che, a meno di apportare modifiche meccaniche allo strumento, l’indice e il controindice coincidono in una sola condizione che è quella di progetto.
Nella Fig.20 sono illustrate le curve di risposta di un processo munito di regolazione automatica ad azione proporzionale per una variazione di carico a gradino.
Il tipo di risposta dipende dall’ampiezza della banda proporzionale dello strumento. Una banda proporzionale. Una banda proporzionale piccola produce una
H’
H
ϑ1
Retta di carico
Temperatura
Apertura valvola
1 0 0,5
Indi
ce
Con
troin
dice
ϑ2
ϑ0
ϑ’0
ϑ’
H”

Capitolo 1 REGOLAZIONE PNEUMATICA
28
curva di risposta con molte oscillazioni mentre con una banda proporzionale ampia la variabile raggiunge il nuovo valore con andamento aperiodico.
Nel primo caso però lo scarto è inferiore che nel secondo.
Fig.20 – Curve di risposta di un processo munito di regolazione proporzionale.
Di solito si cerca di regolare la banda proporzionale in modo di avere una
curva di risposta leggermente sottosmorzata del tipo intermedio della Fig.20. Ciò rappresenta una soluzione di compromesso che eviti l’effetto dannoso di uno scarto eccessivo ad ogni variazione di carico dovuto a una banda proporzionale troppo grande, senza provocare dall’altra parte continue oscillazioni della variabile ad ogni disturbo del processo a causa di una banda proporzionale troppo piccola.
Tempo
Carico
Banda proporzionale piccola
Banda proporzionale media
Banda proporzionale grande
Scarto Variabile misurata
Valore desiderato
Variabile misurata
Variabile misurata

Capitolo 1 REGOLAZIONE PNEUMATICA
29
Nella Fig.21 è rappresentata la curva di risposta di un processo in cui la variabile, dopo una variazione di carico, venga riportata sul valore originario spostando opportunamente il controindice sulla scala dello strumento.
Naturalmente questa correzione manuale è possibile quando le variazioni di carico del processo non siano frequenti, altrimenti l’operatore deve intervenire continuamente sullo strumento il quale perde così la sua dote maggiore rappresentata dalla automaticità di funzionamento.
Fig.21 – Correzione manuale per una variazione di carico. Come si vede dalla figura, dall’istante t1 in cui interviene la variazione di
carico la variabile viene mantenuta costante su un valore che differisce dal valore desiderato della quantità m che rappresenta lo scarto. Se, come è indicato all’istante t2, si modifica il valore desiderato spostando manualmente il controindice sulla scala graduata di una quantità opportuna m’, la variabile pur differendo dal nuovo valore desiderato, torna a coincidere con il valore originale.
La regolazione proporzionale è indicata nei processi che, oltre ad andare incontro a piccole e rare variazioni di carico, abbiano altresì grande ricettività, piccola velocità di risposta e piccoli ritardi.
Tempo
Carico
Scarto m
Variabile misurata
Valore desiderato
m’
t1 t2

Capitolo 1 REGOLAZIONE PNEUMATICA
30
Ricettività: Facendo riferimento alla figura seguente, nell’ipotesi che Va = Vb, per la
stessa variazione di carico, il livello aumenta più in a che in b.
tempo b è più ricettivo di a definendo con ricettività il rapporto tra la quantità di
energia entrante nel processo e le corrispondente variazione della variabile misurata. Ricettività: Livello: m3/m Pressione: m3 / (kg/m2) Termico: kcal/°C
La presenza di ritardi notevoli limita sensibilmente la possibilità di usare una
banda proporzionale stretta.
Va
Vb
a
b
h

Capitolo 1 REGOLAZIONE PNEUMATICA
31
Essi infatti sono responsabili dello sfasamento fra il valore istantaneo dell’errore e l’azione correttiva.
Lo sfasamento angolare fra variabile ed azione correttiva, dipende dalle caratteristiche del sistema (ad esempio il ritardo cinematico del sistema = tempo che impiega ad es. l’H2O a passare dal punto in cui viene scaldata al punto in cui incontra l’elemento sensibile) in particolare dalla frequenza con cui oscilla il sistema che dipende anche dalla banda proporzionale.
Fig.22 – Sfasamento fra variabile e azione correttiva.
Tempo
Variabile
Azione correttiva
Ritardo
Ritardo
Ritardo
Banda proporzionale grande
Banda proporzionale piccola
Banda proporzionale media

Capitolo 1 REGOLAZIONE PNEUMATICA
32
Riducendo la banda proporzionale può accadere perciò che lo sfasamento raggiunga i 180°.
In questo caso l’errore e l’azione correttiva vengono a trovarsi in opposizione di fase per cui il sistema entra in autoscillazione. Nella Fig.22 si può vedere come, restando costante il ritardo, l’aumento della frequenza di oscillazione del sistema dovuto ad una riduzione della banda proporzionale possa portare l’azione correttiva in opposizione di fase all’andamento della variabile.
Infatti la riduzione della banda proporzionale fa, tra l’altro, andare la velocità di risposta e, quindi, la frequenza.
GUADAGNO: dipende anche dalla banda proporzionale: esso è il rapporto fra la modificazione apportata nel processo dall’azione correttiva e la modificazione rilevata dallo strumento che ha generato l’intervento correttivo.
Il guadagno dipende, così, dal sistema (cioè dall'efficacia di intervento nel senso della potenza che può erogare il sistema per intervenire) e dalla banda (cioè dall’intervallo di variazione della variabile entro cui erogo tutta la potenza).
Si può quindi concludere che un sistema regolato entra tanto più facilmente in oscillazione quanto maggiori sono i ritardi e quanto minore è la banda proporzionale dello strumento. Pertanto, la presenza in un processo di ritardi notevoli, impedendo di adottare una banda proporzionale stretta, limita fortemente la possibilità di regolazione mediante l’azione proporzionale.
Considerazioni finali: Quanto più grandi sono i ritardi, tanto più ampia deve essere la banda
proporzionale al fine di evitare le oscillazioni; quanto più ampia è la banda proporzionale, tanto più grande è lo scarto conseguente a una variazione di carico.

Capitolo 1 REGOLAZIONE PNEUMATICA
33
1.4 Azione integrale. Uno strumento di regolazione viene detto ad azione integrale quando fa
corrispondere fra l’apertura della valvola regolatrice e il valore istantaneo dell’errore una relazione espressa dall’equazione:
la valvola può rimanere in una posizione diversa da quella iniziale anche
dopo che la variabile è tornata sul valore desiderato e quindi e = 0. Perché ciò avvenga basta che sia
con t = istante corrente e t0 = 0 = istante iniziale La velocità della valvola regolatrice è
la regolazione è, quindi, del tipo flottante a velocità proporzionale. Nello stesso istante in cui appare la variazione la valvola regolatrice comincia
a muoversi con una velocità, il cui valore si ricava dalla
Questa velocità rimane costante per tutto il tempo in cui rimane costante
l’errore. La valvola regolatrice ritornerà nella sua posizione originale soltanto dopo
che ci sarà stato un altro errore di segno opposto al primo e di valore tale che l’area
∫+=tedtfPP
00
00
≠∫tedt
fedtdP
=
fedtdP
=

Capitolo 1 REGOLAZIONE PNEUMATICA
34
compresa fra l’asse dei tempi e la curva errore-tempo sia uguale a quella corrispondente alla prima deviazione della variabile.
Fig.23 – Risposta di uno strumento di regolazione ad azione integrale.
Tempo
Errore %
Velocità di apertura della valvola
Apertura della valvola %
errore
P
t

Capitolo 1 REGOLAZIONE PNEUMATICA
35
Fig.24 – Ritorno della valvola nella posizione originale. Definizione: Fattore di velocità = P/te (vedi Fig.23) è la percentuale dell’escursione della valvola al minuto (100*P/t) per
variazione percentuale della variabile (e*100) rispetto al range dello strumento. Essendo
∫+=tedtfPP
00 ; se e = cost.
P = P0 + fet; se P0 = 0 : f = P/et = fattore di velocità.
Tempo
Apertura della valvola
Errore

Capitolo 1 REGOLAZIONE PNEUMATICA
36
La Fig.25 illustra alcune curve di risposta di un processo munito di
regolazione integrale nel caso tipico di una variazione di carico a gradino. Fig.25 – Risposta di un processo munito di regolazione integrale. Come si vede dalla figura, quanto maggiore è il fattore di velocità dello
strumento, tanto più grande è la tendenza del sistema a produrre oscillazioni. Con l’aumentare del fattore di velocità, l’azione correttiva si fa infatti sempre
più brusca e la regolazione integrale si fa sempre più vicina alla regolazione a due posizioni. L’entità delle oscillazioni per un dato valore del fattore di velocità dipende dalle caratteristiche del processo e dai ritardi del sistema. Un fattore di velocità alto è vantaggioso e può essere adottato quando la velocità di reazione del processo è alta e i ritardi sono piccoli.
In genere è conveniente adottare un fattore di velocità tale che la curva di risposta risulti leggermente sottosmorzata in modo che la variabile ritorni sul valore desiderato in un tempo relativamente breve e senza troppe oscillazioni.
La regolazione integrale è usata molto spesso in combinazione con altri tipi di regolazione, come vedremo più avanti. Da sola essa viene impiegata vantaggiosamente nei processi con piccoli ritardi, alta velocità di risposta e nei quali
Carico
Variabile misurata
Variabile misurata
Variabile misurata
Tempo
Fattore di velocità piccolo
Fattore di velocità medio
Fattore di velocità grande

Capitolo 1 REGOLAZIONE PNEUMATICA
37
le variazioni di carico sono piccole e graduali. Qualora queste ultime fossero invece grandi e improvvise, l’azione correttiva risulterebbe troppo lenta e l’errore persisterebbe per un tempo eccessivo.
A uno squilibrio improvviso comunque forte della variabile, il segnale integrale in uscita dallo strumento comincia a far variare progressivamente l’apertura della valvola regolatrice. Questa si muove tanto più velocemente quanto più grande è lo squilibrio, tuttavia può accadere che nei primi istanti il suo intervento sia inadeguato a correggere degli squilibri rilevanti. L’azione integrale produce in pieno il suo effetto in un secondo tempo proseguendo la sua azione correttiva fino all’annullamento completo dello scarto.
Se si tratta però di compensare sul nascere una causa di squilibrio improvvisa, l’azione integrale deve essere accoppiata a una azione regolatrice più pronta quale l’azione proporzionale.
Nella regolazione ad azione proporzionale la velocità di spostamento della valvola regolatrice è proporzionale alla velocità di variazione dell’errore:
dP/dt = de/bdt Se quindi la deviazione della variabile dal valore desiderato avviene
rapidamente altrettanto rapidamente interviene l’azione correttiva.

Capitolo 1 REGOLAZIONE PNEUMATICA
38
Fig. 26 – Risposta di uno strumento di regolazione ad azione proporzionale più integrale.
Nella regolazione integrale, invece, la velocità di spostamento della valvola
regolatrice risulta, come abbiamo visto, direttamente proporzionale all’entità dell’errore per cui la sua azione correttiva diviene efficace solo dopo che si è prodotto un segnale errore di una certa consistenza.
La relazione, in uno strumento P.I. fra errore e correzione è:
Variabile misurata
Valore desiderato
Tempo
Posi
zion
e de
ll’el
emen
to fi
nale
di c
ontro
llo
B
E = errore
Azione proporzionale Integrale
Azione Integrale
Azione Proporzionale
T
P
P0
B
P2
P1
B
P

Capitolo 1 REGOLAZIONE PNEUMATICA
39
velocità di integrazione (reset rate) = P/TB Esprime anche di quante volte, nell’unità di tempo la variazione nella
posizione dell’elemento finale di controllo dovuta all’azione integrale (P) ripete quella dovuta alla sola azione proporzionale (B). La velocità di integrazione viene espressa perciò generalmente in ripetizioni al minuto. Se, per esempio, il segnale in uscita dovuto alla sola azione proporzionale è uguale al 3% del valore di fondo scala (es. 15 psi), con un’azione integrale pari a 1 ripetizioni/min il segnale di uscita aumenterà ancora ogni minuto del 3% del valore di fondo scala; con l’azione integrale predisposta a 2 ripetizioni/min il segnale in uscita aumenterà ancora ogni minuto del 6% del valore di fondo scala.
La velocità di integrazione in uno strumento di regolazione ad azione proporzionale più integrale viene predisposta al valore voluto con un aggiustamento manuale; essa determina la pendenza della curva del segnale di uscita ed è indipendente sia dalla deviazione della variabile controllata che dalla ampiezza della banda proporzionale.
Considerando il caso della Fig.26 si dimostra facilmente che la costante h che compare nell’equazione è data da: h = r/b; dove r è la velocità di integrazione in ripetizioni per unità di tempo e b è la banda proporzionale dello strumento.
Dalla Fig.26 si ha infatti:
(eq. della regolazione proporzionale) e dalla
∫++=t
edthbePP
00
bePP 01 +=
∫++=t
edthbePP
00

Capitolo 1 REGOLAZIONE PNEUMATICA
40
La velocità di integrazione, secondo la definizione che ne abbiamo data, risulta pertanto:
e sostituendo in questa equazione i valori di (p2 – p1) e (p1 – p0) ricavati
dalla precedenti si ottiene: r = bh L’equazione di un regolatore ad azione proporzionale più integrale risulta
pertanto:
Illustriamo con un esempio l’uso di questa equazione. Esempio: in un sistema di regolazione proporzionale più integrale la banda
proporzionale e la velocità di integrazione dello strumento di controllo sono rispettivamente del 20% e di 0,5 ripetizione/min. In condizioni normali di funzionamento l’apertura della valvola regolatrice è del 50%.
Determinare il grado di apertura della valvola regolatrice dopo che sono trascorsi due minuti dal momento in cui la variabile controllata ha subito una deviazione permanente dal valore desiderato pari al 3% del campo di funzionamento dello strumento.
Soluzione: i dati del problema sono: P0 = 0,5 b = 0,2 r = 0,5 ripetizioni/min e = 0,03. Sostituendo questi valori nell’equazione in esame e risolvendola per t=2, si
ottiene. P = 0,80
hetPP += 12
( )01
12
PPTPP
TBPr
−−
==
∫++=t
edtbr
bePP
00

Capitolo 1 REGOLAZIONE PNEUMATICA
41
Si conclude perciò che per un errore e=0,03 persistente per 2 minuti lo strumento di regolazione fa variare il grado di apertura della valvola regolatrice dal 50% all’80%.
L’apertura della valvola dovuta alla sola azione proporzionale sarebbe stata del 65% come si ricava dalla nostra equazione se si trascura l’ultimo addendo.
Nella Fig.27 è illustrato schematicamente un sistema di regolazione pneumatico ad azione proporzionale più integrale.
Fig.27 – Sistema di regolazione pneumatica ad azione proporzionale più
integrale.

Capitolo 1 REGOLAZIONE PNEUMATICA
42
Nelle condizioni normali di funzionamento la pressione dell’aria nei due soffietti è la stessa ed è uguale all’aria in uscita dallo strumento. Supponiamo che, a un certo istante, avvenga nel processo una variazione di carico tale che la variabile controllata devi dal valore desiderato provocando un allontanamento della paletta dall’ugello.
Attraverso l’azione del relay ne consegue un aumento della pressione in uscita. Considerando inizialmente interrotto il collegamento fra i due soffietti proporzionale e integrale, l’aumento della pressione in uscita viene risentito dal soffietto proporzionale il quale con la sua azione di reazione tende a riavvicinare la paletta all’ugello e fa sì che il sistema assuma una configurazione corrispondente al valore della deviazione della variabile controllata.
Occorre a questo punto tener conto del fatto che la resistenza variabile R ha un valore finito, per cui, mano a mano che aumenta la pressione nel soffietto proporzionale B, l’aria comincia a passare gradualmente da questo al soffietto integrale I. La pressione in questo soffietto comincia perciò a salire e ciò provoca nuovamente un movimento di allontanamento della paletta dall’ugello e quindi un nuovo aumento della pressione in uscita dallo strumento e nel soffietto proporzionale B.
Nuova aria passa pertanto da B e I e il ciclo si ripete con continuità provocando un aumento continuo della pressione in uscita dallo strumento. La valvola regolatrice, in conseguenza del costante aumento della pressione di uscita dallo strumento, va gradualmente variando il suo grado di apertura apportando sul processo l’azione correttiva tendente a riportare la variabile controllata a coincidere con il valore desiderato. Il passaggio dell’aria attraverso la resistenza R si riduce mano a mano che la differenza di pressione fra i due soffietti diminuisce, cioè, essendo questa differenza di pressione proporzionale alla deviazione della variabile controllata mano a mano che questa ultima si avvicina al valore desiderato. Quando la variabile torna a coincidere con esso, la paletta riassume la posizione originaria davanti all’ugello mentre nei due soffietti agisce la stessa pressione; questa pressione è quella corrispondente all’apertura della valvola regolatrice necessaria a mantenere la variabile al valore desiderato malgrado la nuova condizione di carico del processo.
Per fare un esempio pratico, supponiamo che il sistema sia inizialmente in equilibrio con una pressione sulla valvola di controllo di 7 psig. La stessa pressione agisce nei due soffietti proporzionale e integrale. Supponiamo ora che, in seguito a una variazione di carico intervenuta nel processo, la pressione sulla valvola

Capitolo 1 REGOLAZIONE PNEUMATICA
43
regolatrice, necessaria per mantenere la variabile controllata sul valore desiderato, divenga 11 psig.
La variazione di carico provoca una deviazione iniziale della variabile. Supponendo che essa sia del 6% del campo di funzionamento dello strumento e che la banda proporzionale dello stesso sia del 30%, la variazione corrispondente della pressione in uscita dovuta all’azione proporzionale, sarà uguale a 0,06/0,3=0,2 ossia pari al 20% del campo di variazione della pressione in uscita.
Poiché quest’ultima varia da 3 a 15 psig con una escursione di 12 psig la variazione di pressione dovuta all’azione proporzionale risulta 0,2x12=2,4 psig. La pressione sulla valvola regolatrice passa quindi per effetto dell’azione proporzionale da 7 a 9,4 psig. Anche la pressione nel soffietto proporzionale diviene uguale a 9,4 psig e quindi ai due lati della resistenza R si viene a creare una differenza di pressione di 9,4-7=2,4 psig. Ciò provoca un flusso di aria dal soffietto proporzionale a quello integrale la cui pressione comincia ad aumentare provocando un graduale allontanamento della paletta dall’ugello. Ne consegue un ulteriore aumento della pressione di uscita e quindi il ripristinarsi della differenza di pressione fra i due soffietti.
Il fenomeno si ripete con un costante aumento della pressione di uscita e si arresta soltanto quando essa ha raggiunto gli 11 psig. A questo punto la valvola regolatrice ha raggiunto l’apertura sufficiente a ristabilire nel processo le condizioni iniziali per cui la variabile controllata torna a coincidere con il valore desiderato. La paletta riassume la posizione iniziale davanti all’ugello mentre nei due soffietti si stabilisce la stessa pressione di uscita che agisce nella valvola regolatrice e che rimane uguale a 11 psig. L’intensità dell’azione integrale viene regolata variando opportunamente la resistenza variabile R. Di solito essa è costituita da una valvola a spillo la cui luce di passaggio viene regolata girando una manopola sopra una scala graduata direttamente in ripetizioni al minuto.
Generalmente questa scala va da 0 fino a un massimo di 50 ripetizioni al minuto. Se la resistenza variabile è nulla le pressioni nei due soffietti sono praticamente sempre equilibrate e quindi la loro azione sulla paletta è costantemente nulla. In questo caso lo strumento funziona con azione tutto o niente.
Se la resistenza variabile diviene invece tanto grande da interrompere totalmente al linea di comunicazione fra i due soffietti, il soffietto integrale perde ogni efficacia e lo strumento viene a funzionare con azione puramente proporzionale.

Capitolo 1 REGOLAZIONE PNEUMATICA
44
Per ogni valore intermedio della resistenza variabile si ottiene il funzionamento ad azione proporzionale più integrale.
Fig.28 – Risposta di un processo munito di regolazione proporzionale più integrale.
Carico
Variazione dell’apertura della valvola
Variazione dell’apertura della valvola
Variazione dell’apertura della valvola
Tempo
Azione proporzionale + integrale
Azione integrale
Azione proporzionale
Variazione della variabile misurata
a
b
c
d
e

Capitolo 1 REGOLAZIONE PNEUMATICA
45
I valori più alti della velocità di integrazione vengono usati generalmente in quei processi, come per esempio il controllo della portata di un fluido, che hanno una velocità di risposta elevata e piccoli ritardi. Nei sistemi di controllo della temperatura e in altri processi a lenta risposta vengono adottate basse velocità di integrazione onde evitare il prodursi di oscillazioni.
Il regolatore ad azione proporzionale più integrale viene perciò detto anche a riporto automatico (sui testi inglesi “automatic-reset”).
E’ evidente quindi che, nei processi che presentano un ritardo, l’aggiunta all’azione proporzionale di un’azione integrale troppo marcata darà luogo al nascere di oscillazioni. Per evitare ciò occorre rallentare l’azione correttiva adeguandola alla velocità di reazione del processo. Ciò viene ottenuto aumentando la banda proporzionale e riducendo la velocità di integrazione.
In questo modo però la variabile ritorna molto lentamente nel valore desiderato e quindi il sistema non è più soddisfacente.
Se poi la deviazione della variabile controllata dal valore desiderato persiste per molto tempo, può accadere che la valvola regolatrice raggiunga una posizione limite fermandosi in apertura totale o chiusura totale. Da questo momento in poi il sistema cessa ogni azione di regolazione. Il segnale di uscita rimane invariato finché l’errore non cambia segno, ossia finché la variabile non è passata dall’altro lato del valore desiderato.
Queste situazione si verifica comunemente durante la fase di avviamento iniziale di un impianto.
Concludendo, la regolazione proporzionale più integrale è indicata nei processi in cui si hanno ampie e frequenti variazioni di carico in quanto è in grado di reagire efficacemente ad esse mantenendo la variabile controllata sul valore desiderato.

Capitolo 1 REGOLAZIONE PNEUMATICA
46
Fig.29 – Effetto della velocità di integrazione sulla risposta di un sistema di regolazione ad azione proporzionale più integrale.
Carico
Variabile misurata
Variabile misurata
Variabile misurata
Tempo
Velocità di integrazione bassa
Velocità di integrazione media
Velocità di integrazione alta

Capitolo 1 REGOLAZIONE PNEUMATICA
47
Fig. 30 – Effetto dell’ampiezza della banda proporzionale sulla risposta di un sistema di regolazione ad azione proporzionale più integrale.
Il suo funzionamento peraltro non è interamente soddisfacente allorché siano
presenti tempi morti e ritardi rilevanti.
Carico
Variabile misurata
Variabile misurata
Variabile misurata
Tempo
Banda proporzionale grande
Banda proporzionale media
Banda proporzionale piccola

Capitolo 1 REGOLAZIONE PNEUMATICA
48
1.5 Azione derivativa. Nel caso di processi in cui siano presenti tempi morti e ritardi notevoli la
regolazione per mezzo dell’azione proporzionale e integrale risulta generalmente di difficile attuazione.
Lo strumento di regolazione realizza una relazione lineare di proporzionalità fra il segnale di uscita e la velocità di variazione del segnale errore di ingresso. Questa relazione viene espressa dall’equazione:
la regolazione derivativa non intraprende nessuna azione correttiva finché
l’errore rimane costante, a prescindere dalla sua entità. In quest’ultimo caso il segnale di uscita è ancora costituito da una
oscillazione sinusoidale ma sfasata di 90° in anticipo rispetto al segnale di ingresso. La velocità di spostamento dell’elemento finale di controllo si ottiene
differenziando l’equazione precedente:
L’azione derivativa può essere inoltre diretta o inversa a seconda che la
costante di proporzionalità m è positiva o negativa. Nelle considerazioni che faremo, dove non sia espressamente specificato, considereremo sempre m positivo.
dtdemPP 0 +=
2
2
dtedm
dtdp
=

Capitolo 1 REGOLAZIONE PNEUMATICA
49
Fig.31 – Risposta di uno strumento di regolazione ad azione derivativa. Azione proporzionale più derivativa L’azione derivativa da sola non viene mai adottata negli strumenti di
regolazione in quanto essa non reagisce in nessun modo a una deviazione costante della variabile comunque grande essa sia. Di solito l’azione derivativa viene impiegata in combinazione con quella proporzionale e integrale.
L’equazione di un regolatore ad azione proporzionale più derivativa è:
L’azione derivativa provoca un rapido spostamento della valvola regolatrice di valore maggiore di quello che si avrebbe con la sola azione proporzionale. Questa brusca apertura della valvola apporta al processo una forte azione correttiva iniziale che contrasta immediatamente il movimento di allontanamento della variabile dal
dtdem
bePP ++= 0
Tempo
Errore %
Velocità di apertura della valvola
Apertura della valvola %

Capitolo 1 REGOLAZIONE PNEUMATICA
50
valore desiderato. Successivamente, man mano che la velocità di incremento dell’errore diminuisce, l’azione derivativa si attenua sempre di più fino ad annullarsi completamente quando l’errore diventa costante. A questo punto lo strumento di regolazione funziona con la sola azione proporzionale.
Il coefficiente di proporzionalità m che esprime l’entità dell’azione derivativa, viene generalmente scritto sotto la forma: m = q/b; in cui b è la banda proporzionale dello strumento e q è una grandezza caratteristica chiamata tempo di derivazione (sui testi in lingua inglese: “rate time”).
Fig.32 – Risposta di uno strumento di regolazione ad azione proporzionale
più derivativa. Essa viene espressa in unità di tempo e il suo valore serve a indicare
quantitativamente l’entità dell’azione derivativa. Calcolo di m. Nel caso di regolazione solo proporzionale:
t1
Errore %
t0
P P
Apertura della valvola
Apertura della valvola
Apertura della valvola
Tempo
Azione proporzionale + derivativa
Azione derivativa
Azione proporzionale

Capitolo 1 REGOLAZIONE PNEUMATICA
51
nel caso di regolazione proporzionale più derivativa:
Supponendo di approssimare la curva e (t) ad un tratto rettilineo (per un breve tratto è sempre possibile) e (t) = kt
( )btePP 2
0 =−
( )1
10
ttdtdem
btePP
=
⎟⎠⎞
⎜⎝⎛+=−
P
P+D P %
P0
m de/dt
P
t 1 t 2 Tempo

Capitolo 1 REGOLAZIONE PNEUMATICA
52
(l’entità di t2 – t1, dipende dalla “distanza” mde/dt, vedi figura) essendo m =q/b allora q = t2 – t1 generalizzando ad una qualsiasi trasformazione:
q (può essere variata sullo strumento) è il tempo di derivazione. Come si vede dalla figura, l’azione derivativa tende a livellare la curva
secondo un andamento parallelo all’asse dei tempi.
Fig.33 – Effetto dell’azione derivativa.
bttmmk
bkt
bktPP 1212
0−
=⇒+==−
dtde
bq
bePP ++= 0
Valore desiderato
Temperatura
Tempo

Capitolo 1 REGOLAZIONE PNEUMATICA
53
Consideriamo dapprima il caso in cui la variabile controllata si stia allontanando dal valore desiderato, diminuendo con velocità costante, tale da passare dal punto A al punto B in 2 minuti.
La posizione della valvola regolatrice dovuta alla sola azione proporzionale è determinata dal punto corrispondente lungo la retta di lavoro.
Allo stesso istante, supponendo di predisporre il tempo di derivazione a 2 minuti, l’apertura della valvola regolatrice, per effetto dell’azione proporzionale e derivativa combinate, risulta uguale a quella che la sola azione proporzionale avrebbe provocato due minuti più tardi, ossia quando la temperatura fosse giunta in C.
Il risultato complessivo delle due azioni equivale a un’azione proporzionale immaginaria con banda proporzionale più stretta di quella effettiva (retta di lavoro tratteggiata).
Fig.34 – Effetto dell’azione derivativa quando la variabile si allontana dal valore desiderato.
Temperatura %
100
Valore desiderato
C1
B1
A
B
C
0
Retta di lavoro dell’azione proporzionale
Apertura prodotta dall’azione proporzionale
Apertura prodotta dall’azione proporzionale + derivativa
0 50 100 Apertura della valvola %

Capitolo 1 REGOLAZIONE PNEUMATICA
54
Consideriamo ora il caso in cui la variabile controllata si stia avvicinando al valore desiderato (Fig.35).
Aumentando con velocità costante essa passa dal punto A al punto B in 2 minuti. Per effetto dell’azione derivativa l’apertura complessiva della valvola in corrispondenza del punto A è uguale a quella che la sola azione proporzionale provocherebbe due minuti più tardi, cioè quando la temperatura è in B.
Ne risulta pertanto che i punti di funzionamento dovuti all’azione proporzionale e derivativa combinate, corrispondono a quelli di un’azione proporzionale immaginaria con una banda proporzionale più ampia di quella effettiva (retta di lavoro tratteggiata).
Fig.35 – Effetto dell’azione derivativa quando la variabile si avvicina al valore desiderato.
Temperatura %
100
Valore desiderato
A 1
B1
50
B
A
0
Retta di lavoro dell’azione proporzionale
Apertura prodotta dall’azione proporzionale
Apertura prodotta dall’azione proporzionale + derivativa
0 50 100 Apertura della valvola %

Capitolo 1 REGOLAZIONE PNEUMATICA
55
Si può pertanto concludere dicendo che quando la deviazione della variabile controllata dal valore desiderato sta aumentando (Fig.34) l’azione derivativa equivale a una diminuzione della banda proporzionale dello strumento.
L’azione di controllo risulta pertanto più sensibile ed energica e le deviazioni della variabile sono contenute entro limiti più stretti.
Quando invece la deviazione della variabile sta diminuendo (Fig.35) l’azione derivativa equivale ad un allargamento della banda proporzionale; l’azione correttiva viene attenuata e si riduce la possibilità che la variabile oltrepassi il valore desiderato provocando il nascere di oscillazioni.
Come si vede l’azione derivativa attenua le oscillazioni ma non ha nessuna influenza per quanto riguarda l’eliminazione dello scarto della variabile dal valore desiderato.
Come si vede dalla Fig.36 benché la temperatura in A sia ancora al di sotto del valore desiderato, l’azione derivativa, anticipando quella proporzionale posiziona la valvola regolatrice come per correggere l’eccesso di temperatura che si avrebbe in B.
Effetto dell’azione derivativa durante un’oscillazione completa della variabile:
dtdem
bePP o +=−
dtde
PPm
PPbe
00
1)( −
−=−
⎟⎟⎠
⎞⎜⎜⎝
⎛−
−=−
dtde
PPmb
ePP
0
0
1
⎟⎟⎠
⎞⎜⎜⎝
⎛−
−dtde
PPmb
0
1 è la banda proporzionale “fittizia” da confrontare con
quella del regolatore P: P - P0 = e/b se:
- ⇒=−
00 dt
dePP
m proporzionale

Capitolo 1 REGOLAZIONE PNEUMATICA
56
- ⇒<−
00 dt
dePP
m banda più stretta della proporzionale
- ⇒>−
00 dt
dePP
m banda più larga della proporzionale
⇒> 0m azione derivativa diretta ⇒< 0m azione derivativa inversa
Fig.36 – Effetto di anticipo dell’azione derivativa. Considerando ancora quello che è il caso illustrato in figura 35, si vede che se
la velocità di spostamento della temperatura dal punto A fosse più alta o fosse maggiore il tempo di derivazione fissato sullo strumento, il punto B potrebbe passare dall’altro lato del valore desiderato durante il tempo di derivazione. Cioè può
Temperatura %
100
Valore desiderato
B
50
A
0
Spostamento della variabile corrispondente al tempo di derivazione
Apertura prodotta dall’azione proporzionale
Apertura prodotta dall’azione proporzionale + derivativa
0 50 100 Apertura della valvola %

Capitolo 1 REGOLAZIONE PNEUMATICA
57
accadere che, quando la temperatura è nel punto A, l’apertura della valvola dovuta alle azioni proporzionale e derivativa combinate sia uguale a quella che la sola azione proporzionale avrebbe dato quando la temperatura avesse superato il valore desiderato
L’azione derivativa inversa risulta vantaggiosa nei processi che hanno grande
velocità di reazione, quali, per esempio, quelli riguardanti il moto di fluidi. In simili casi lo strumento di regolazione può essere predisposto con una banda proporzionale stretta al fine di ottenere un controllo più sensibile; tuttavia, quando si verifica una deviazione della variabile, l’allargamento temporaneo della banda proporzionale apporta sul sistema un effetto stabilizzante. In questo modo si possono sfruttare i vantaggi di una banda proporzionale stretta senza andare incontro all’inconveniente di avere troppe oscillazioni.

Capitolo 1 REGOLAZIONE PNEUMATICA
58
1.6 Azione P.I.D.
A) dtde
bqedt
br
bePP
t
+++= ∫0
0
Esempio: in un sistema di regolazione, i valori di predisposizione dello
strumento sono: banda proporzionale del 30%, velocità di integrazione 0,5 ripetizioni al minuto tempo di derivazione 0,3 minuti.
Fig.37 – Risposta di uno strumento di regolazione ad azione proporzionale, integrale e derivativa.
Variabile controllata %
Apertura della valvola %
Apertura della valvola %
Apertura della valvola %
Apertura della valvola %
Tempo
Azione proporzionale + integrale + derivativa
Azione derivativa
Azione integrale
Azione proporzionale
Valore desiderato

Capitolo 1 REGOLAZIONE PNEUMATICA
59
Partendo da un’apertura iniziale della valvola regolatrice del 50%, calcolare il grado di apertura della stessa dopo che è trascorso 1 minuto dall’istante in cui la variabile ha cominciato a subire una deviazione dal valore desiderato espressa dall’equazione:
e = 0,06 t. La variabile controllata si allontana dal valore desiderato; al termine
dell’azione correttiva dello strumento, la variabile ritorna peraltro a coincidere con esso per effetto dell’azione integrale che fa assumere alla valvola regolatrice una apertura finale adeguata al nuovo valore del carico.
Soluzione: P0 = 0,5 q = 0,3 minuti e = 0,06 t
b = 0,3 r = 0,5 rpm de/dt = 0,06 Sostituendo questi valori nella A) con t =1 risulta: P = 0,5+0,2+0,05+0,06 = 0,81 Cioè dopo un minuto l’apertura della valvola è passata dal 50% all’81%. Se la banda proporz. fosse stata del 100% avremmo avuto sempre per t = 1: (32) p = 0,5+0,06+0,015+0,018 = 0,593. Il grado di apertura corrispondente a ciascuna azione è, nei due casi:
b=0,3 b=1
apertura iniziale 50% 50% azione proporzionale 20% 6% azione integrale 5% 1,5% azione derivativa 6% 1,8% TOTALE 81% 59,3%

Capitolo 1 REGOLAZIONE PNEUMATICA
60
Regolatore pneumatico P.I.D.
Fig.38 – Sistema di regolazione pneumatica ad azione proporzionale,
integrale e derivativa. L’azione derivativa risulta vantaggiosa nella regolazione dei processi con
elevata velocità di risposta. In essi le deviazioni della variabile avvengono rapidamente e poiché il segnale derivativo è proporzionale alla velocità di variazione

Capitolo 1 REGOLAZIONE PNEUMATICA
61
del segnale errore, ne risulta un’azione particolarmente efficace. Generalmente negli strumenti di regolazione il tempo di derivazione arriva al massimo a circa 10 minuti. L’azione derivativa, pertanto, sarà efficace in quei casi in cui un anticipo massimo di 10 minuti nel posizionamento dell’elemento finale di controllo ha un effetto apprezzabile. Ciò si verifica in pratica per i processi nei quali la costante di tempo non sia superiore alle 2 o 3 ore.
Le pressioni a monte e valle di R1 si equilibrano con ritardo quindi la reazione di B (proporzionale) è più lenta. Nei processi, invece, nei quali la costante di tempo è superiore alle 2 o 3 ore, la velocità di variazione dell’errore è troppo bassa per generare un segnale derivativo tale da agire efficacemente sul processo. Esempi di processo di questo tipo, sono rappresentati, per esempio, dai grandi forni per i trattamenti termici dei metalli. In questi casi l’azione derivativa risulta praticamente inutile.
Ci sono inoltre alcuni casi in cui l’azione derivativa può risultare addirittura dannosa.
Ciò si verifica in quei processi molto disturbati nei quali i disturbi sono del tutto casuali e di brevissima durata.

Capitolo 1 REGOLAZIONE PNEUMATICA
62
1.7 Messa a punto dei regolatori
La banda proporzionale corrispondente al sorgere delle oscillazioni permanenti viene detta banda proporzionale di pendolazione. Essa viene indicata con BPp.
Corrispondente, il tempo impiegato dalla variabile per compiere una oscillazione completa viene definito periodo di pendolazione e indicato con Pp.
L’americano D.W. Pessen ha sviluppato una serie di formule empiriche. Divisione secondo il tipo di funzionamento
- per la regolazione di processi con preminente fase di avviamento: banda proporzionale:
b = 5BPp
velocità di integrazione:
r = 3 ripetizioni / Pp
tempo di derivazione:
q = Pp / 2
- per la regolazione di processi a funzionamento prevalentemente continuo: banda proporzionale:
b = 3BPp
velocità di integrazione: r = 2 ripetizioni / Pp tempo di derivazione: q = Pp / 3.

Capitolo 1 REGOLAZIONE PNEUMATICA
63
Divisione secondo il tipo di regolazione
Formule di Ziegler e Nichols:
- azione proporzionale: b=2BPp;
- azione proporzionale e integrale:
b= BP p / 0,45 r= 1,2 ripetizioni /Pp;
- azione proporzionale, integrale e derivativa:
b=BPp/0,6 r=2ripetizioni/Pp
q=Pp/8
E’ bene ripetere che tanto le formule di Pessen che quelle di Ziegler e Nichols, danno dei valori orientativi i quali devono essere poi affinati in base ai risultati pratici ottenuti. La maggioranza dei processi industriali rientra nella categoria dei processi con autoequilibrio. A seconda della durata e del grado di smorzamento del periodo transitorio, i processi con autoequilibrio possono poi suddividersi in:
1. processi di ordine 0 2. processi di ordine 1
3. processi di ordine 2 4. processi con tempo morto

Capitolo 1 REGOLAZIONE PNEUMATICA
64
5. processi di ordine superiore
L’ordine del processo corrisponde all’ordine della eq. differenziale che descrive matematicamente la risposta transitoria del processo stesso. Così, un processo di ordine 2 presenta una risposta transitoria espressa da una equazione differenziale di 2° ordine.
La risposta transitoria risulta tanto più “rallentata” quanto maggiore è l’ordine che contraddistingue il processo.
Fig.39 - Risposta transitoria di un processo di ordine 1 con autoequilibrio e tempo morto; ad una risposta di questo tipo si può ricondurre con buona approssimazione quella di un processo di ordine superiore con autoequilibrio.
Questo rallentamento può essere assimilato ad un tempo morto tanto più quanto è
alto l’ordine del processo
Costante di tempo Ts
Tr
t=0 tempo
X

Capitolo 1 REGOLAZIONE PNEUMATICA
65
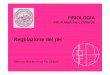
Fig.40 - Determinazione grafica dei fattori caratteristici di un processo di ordine superiore sulla base dell’andamento della risposta transitoria.
Questa circostanza consente di sostituire, con buona approssimazione, la risposta transitoria di un processo di ordine superiore con quella di un processo di ordine 1 con autoequilibrio e tempo morto.
E’ così possibile semplificare la caratterizzazione del comportamento dinamico di un processo di ordine superiore con autoequilibrio, essendo infatti sufficiente conoscere soltanto i seguenti tre fattori caratteristici: il fattore di amplificazione Vs, la costante di tempo Ts ed il tempo morto equivalente Tt.
La determinazione di questi fattori si effettua per via grafica dalla risposta transitoria in base al metodo illustrato nella figura precedente. Il tempo morto equivalente è pari al segmento intercettato sull’asse dei tempi dalla tangente alla curva della risposta transitoria nel punto di flesso F.
Tt Ts
X
F
Tempo
Tempo
Y
y
I=Vsy

Capitolo 1 REGOLAZIONE PNEUMATICA
66
La costante di tempo Ts risulta invece individuata dall’intersezione della stessa tangente con la linea orizzontale corrispondente al nuovo stato di equilibrio.
E’ evidente che la validità di questa approssimazione risulta tanto più grande quanto maggiore è l’ordine del processo. Criterio pratico per la valutazione del grado di difficoltà della regolazione. Quando Tt/Ts<1/10 la regolazione del processo si può ritenere facile. Quando Tt/Ts≈1/6 il processo si può considerare ancora sufficientemente regolabile. Quando Tt/Ts>1/3 la regolazione del processo è difficile.

Capitolo 1 REGOLAZIONE PNEUMATICA
67
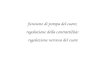
Metodo della curva di reazione (Ziegler-Nichols) Si genera la curva di reazione (sperimentalmente o con metodi di calcolo) che è la variazione libera del sistema (cioè escludendo la regolazione) ad una variazione a gradino del carico o dell’alimentazione
N= tg massima (punto di flesso) L= ritardo= tempo morto equivalente A= valore della variabile all’istante in cui è stata prodotta la variazione di carico (o di alimentazione) ∆P = variazione percentuale del carico (o del grado di apertura della valvola di alimentazione) -regolazione proporzionale: b=NL/∆P
L
X
N
Tempo
Tempo
A

Capitolo 1 REGOLAZIONE PNEUMATICA
68
-regolazione proporzionale e integrale: b=1,1NL/∆P r=0,3/L (ripetizioni al minuto)
-regolazione proporzionale, integrale e derivativa:
b=0,83NL/∆P r=0,5/L (ripetizioni al minuto) q=0,5L (minuti) Caratteristiche di processo ed azioni regolatrici
Tipo di regolazione
Velocità di risposta del
processo
Ritardi
Variazioni di
carico
A due posizioni Bassa Piccoli Piccole e lente
Proporzionale Bassa o media Piccoli o medi Piccole
Proporzionale e Integrale
Qualsiasi Piccoli o medi Qualsiasi ma lente
Proporzionale, integrale e derivativa
Qualsiasi Qualsiasi Qualsiasi