-
7/30/2019 cerlog programs
1/60
KCG COLLEGE OF TECHNOLOGY
KARAPAKKAM
CHENNAI-600097
LABORATORY RECORD
REG NO: 1072064 NAME: VENISHKUMAR.T
M.E.VLSI DESIGN
II-SEMISTER
252252 VLSI LAB-II
DEPARTMENT OF VLSI DESIGN ENGINEERING
-
7/30/2019 cerlog programs
2/60
KCG COLLEGE OF TECHNOLOGY
KARAPAKKAM
CHENNAI-6000097
RECORD CERTIFICATE
Registerno. : 1072064
Name of The Lab : VLSI DESIGN LABORATORY II
Department : VLSI DESIGN ENGINEERING
Name of The Examination : M.E DEGREE
Certified that this Bonafied record Of The work done in the
VLSI
DESIGN LABORATORY By Mr.T.Venishkumar Of Master Of
Engineering (M.E.VLSI DESIGN) II Semester During The Year
2010-
2011.
(T.THOMAS LEONID) (Dr.V.RANGANATHAN)Faculty in Charge Head of
the VLSI Department
Internal Examiner External Examiner
-
7/30/2019 cerlog programs
3/60
INDEX
Exp no Date Title Page no Signature
1 Implementation of 4bit ALUin VHDL and Verilog
2Implementation of 4 bit Sliced
processor in VHDL
3
Implementation of elevator
controller using Embedded
micro controller
4Implementation of Alarm
clock controller using
Embedded micro controller
5Implementation of Model
Train controller using
Embedded micro controller
6 System Design using PLL
-
7/30/2019 cerlog programs
4/60
LIST OF FIGURES:
Exp No Figure No Figure name Page No
1
1.1 Block diagram
1.2 RTL Schematic
1.3 Schematic Diagram
1.4 Output Waveform
2
2.1 Block Diagram
2.2 RTL Schematic
2.3 Output Waveform
3
3.1 Block Diagram
3.2 Flow Chart
3.3 Logic Of The Program
3.4 Observation
3.5 Output
3.6 PIC SimulationOutput
4
4.1 Front Panel Display
4.2 Seven Segment
Display
4.3 Observation
4.4 Output
4.5 PIC Simulation Output
5
5.1 Model Train
Controller
5.2 Flow Chart
5.3 Logic of the Program
5.4 Observation
5.5 Output
5.6 PIC Simulation Output
6
6.1 Block Diagram
6.2 RTL Schematic
6.3 Schematic Diagram
(Id_counter)6.4 Output Waveform
-
7/30/2019 cerlog programs
5/60
Exp: 1Date:
IMPLEMENTATION OF 8 BIT ALU USING VHDL/VERILOG
AIM:
To design and implement a 8 bit ALU in both VHDL and
Verilog.
TOOL REQUIRED:
Xilinx ISE 9.1i
THEORY:
An arithmetic and logic unit is a combinational circuit that
performs
arithmetic and logic operations on a pair of n bit operands. The
operationsperformed by an ALU are controlled by a set of function
select inputs. An ALU
combines addition, subtraction with operations such as shifting
and bitwise logic
operations.ALU consists of arithmetic unit, multiplexers and
logic unit. The core of the
microprocessor or microcontroller is the arithmetic and logic
unit.
PROCEDURE:
Create a new project in Xilinx 9.1i and give the inputs and
outputs
variables through VHDL/ Verilog module.
Program has to be entered into the body of Architecture and have
to
check the syntax.
To give inputs have to create a new source to the test bench
waveform.
By changing the synthesis implementation model have to execute
and
simulate the output waveform.
-
7/30/2019 cerlog programs
6/60
VHDL PROGRAM FOR ALU
library IEEE;
use IEEE.STD_LOGIC_1164.ALL;
use IEEE.STD_LOGIC_ARITH.ALL;use
IEEE.STD_LOGIC_UNSIGNED.ALL;
entity aluvhdl2 is
port ( a,b :in std_logic_vector(7 downto 0);
clk :in std_logic;
rst :in std_logic;
s :in std_logic_vector(3 downto 0);c :out std_logic_vector(7
downto 0));
end aluvhdl2;
architecture Behavioral of aluvhdl2 is
beginprocess(clk,rst,s,a,b)
begin
if (rst='1')thenc
-
7/30/2019 cerlog programs
7/60
-
7/30/2019 cerlog programs
8/60
process
begin
for i in 0 to 255 loopfor j in 0 to 255 loop
for k in 0 to 15 loop
wait for 10 ns;s
-
7/30/2019 cerlog programs
9/60
reg [7:0] a;
reg [7:0] b;
reg [3:0] s;
wire [15:0] c;integer i,j,k;
aluu uut (
.clk(clk),
.a(a),
.b(b),
.s(s),
.c(c));
initial begin
clk = 0;a = 0;
b = 0;s = 0;
for(k=0;k
-
7/30/2019 cerlog programs
10/60
BLOCK DIAGRAM:
Figure 1.1
FUNCTIONAL TABLE:
S(3) S[2 downto 0] Operation
0
000 a - b
001 a + 1010 a - 1
011 b - a
100 b + 1
101 a / b
110 a + b
111 a * b
1
000 a nand b
001 a or b
010 a nor b
011 not a
100 a xor b101 a xnor b
110 a and b
111 a and b
-
7/30/2019 cerlog programs
11/60
RTL SCHEMATIC:
Figure1.2
SCHEMATIC DIAGRAM:
Figure 1.3
-
7/30/2019 cerlog programs
12/60
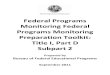
OUTPUT WAVEFORM:
OUTPUT 1:
a = 11011101 (input 1, 8 bit)
b = 00000011 (input 2, 8 bit)
s = 0000 (addition selected, 4bit)c = 0000000011100000 (result,
16 bit )
OUTPUT 2:
a = 10100000 (input 1, 8 bit)
b = 00000001 (input 2, 8 bit)s = 0111 (a AND b, 4bit)
c = 0000000000000000 (result, 16 bit )
Fig. 1.4
-
7/30/2019 cerlog programs
13/60
Exp: 2Date:
IMPLEMENTATION OF 4 BIT SLICE PROCESSOR USING
VHDL
AIM:
To implement 4 bit slice processor in VHDL
TOOL REQUIRED:
Xilinx ISE 9.1i
THEORY:
A 4-bit sliced processor which can perform various arithmetic
and logical
functions. It has two ALU units.Each ALU has a accumulator and a
register. The two inputs are sliced in
to two parts. The lower nibbles are given to accum1 and Breg1
and higher
nibbles are given to accum2 and Breg2. the operations are
performed and theoutputs are appended to get the final result.
PROCEDURE:
Create a new project in Xilinx 9.1i
Create a VHDL/ Verilog module and enter the code for 4 bit
sliceprocessor.
Synthesis the program and generate the RTL schematic.
Add a test bench module to the project.
Write test bench code to test various combinations of the inputs
in theprogram.
Simulate the testbench and view the output waveform.
-
7/30/2019 cerlog programs
14/60
VHDL CODE (4 BIT SLICE processor)
library IEEE;
use IEEE.STD_LOGIC_1164.ALL;
use IEEE.STD_LOGIC_ARITH.ALL;use
IEEE.STD_LOGIC_UNSIGNED.ALL;
entity slice isport(x,y : in std_logic_vector(7 downto 0);
start : in std_logic;
result : out std_logic_vector(7 downto 0);mulout : out
std_logic_vector(15 downto 0);
operation : in std_logic_vector(3 downto 0);
functionload : in std_logic_vector(3 downto 0));
end slice;
Architecture Behavioral of slice is
signal carry1,carry2,borrow1,borrow2 : std_logic;signal
accum1,accum2 : std_logic_vector(3 downto 0);
signal Breg1,Breg2 : std_logic_vector(3 downto 0);
signal m1,m2 : std_logic_vector(7 downto 0);signal sum1,sum2 :
std_logic_vector(4 downto 0):="00000";
signal control1,control2 : std_logic_vector(3 downto 0);
signal exe1,exe2,add,sub:bit : ='0';
signal zout1 : std_logic_vector(3 downto 0):="0000";signal zout2
: std_logic_vector(3 downto 0):="0000";
begin
p1:process(x,y,operation,functionload,start)
beginif(start='1') then
exe1
-
7/30/2019 cerlog programs
15/60
result
-
7/30/2019 cerlog programs
16/60
borrow1
-
7/30/2019 cerlog programs
17/60
elsif(accum2'0');
--Outputs
SIGNAL result : std_logic_vector(7 downto 0);
-
7/30/2019 cerlog programs
18/60
SIGNAL mulout : std_logic_vector(15 downto 0);
begin
-- Instantiate the Unit Under Test (UUT)
uut: slice PORT MAP(
x => x,y => y,
start => start,
result => result,mulout => mulout,
operation => operation,
functionload => functionload
);
tb1 : process
begin
wait for 100 ns;start
-
7/30/2019 cerlog programs
19/60
The design and implementation of 4 bit slice processor has done
in
VHDL.
BLOCK DIAGRAM
Fig.2.1
FUNCTIONAL TABLE
Function Load Operation
0000 OR
0001 AND
0010 NOR
0011 NAND
0100 XOR
0101 NOT x
0110 NOT y
0111 shift right x
1000 shift right y
1001 shift left x1010 shift left y
1011 rotate left x
1100 rotate right y
1101 Add x and y
1110 Subtract y from x
1111 Multiply x and y
-
7/30/2019 cerlog programs
20/60
Table 2.1
RTL SCHEMATIC
Fig.2.2
OUTPUT WAVEFORM
OUTPUT 1:
x = 00000001(input 1, 8 bit)
y = 00001111(input 2, 8 bit)Function load = 0000(x OR y)
Result = 00001111(8 bit)
OUTPUT 2:
x = 00000001(input 1, 8 bit)y = 00000100(input 2, 8 bit)
-
7/30/2019 cerlog programs
21/60
Function load = 0110(NOT y)
Result = 11111011(8 bit)
OUTPUT 3:
Start = 1
x[7:0] = 8b00000001
y[7:0] = 8b00000010function load[3:0] = 4b0110
result[7:0] = 8b11111110
Fig 2.3
-
7/30/2019 cerlog programs
22/60
Exp: 3Date:
IMPLEMEMTATION OF ELEVATOR CONTROLLER
USING PIC MICROCONTROLLER (PIC16F8778)
AIM:
To implement elevator controller using embedded
microcontroller
PIC16F8778.
TOOLS:
MPLAB.IDE package
PIC Simulator
THEORY:
The elevator uses the principles of distributed system designing
thecomponents are physically distributed among the elevator and
flows of the
building. The elevator car is the unit that runs up and down in
the host way can
stop at only floor every elevator car has a control panel that
allow the passengerto select the floor to stop at each floor has a
single control panel at calls for an
elevator. Each floor has a set of displays to show the current
position of the
elevator car. The user interface consists of elevator floor
control panel anddisplays. There is one display per host way always
shows the some state.
PROCEDURE:
Select the MPLAB icon from the desktop.
Select the FILE menu from the menu bar and then select NEW.
Enter the program and save it with .ASM extension.
Select the project from menu bar and then select project wizard,
then
select the device PIC16F877A and click next and next.
Enter the project name and enter the project directory.
Now add the saved program to project as source files.
Select project and click BUILDALL, if coding is switch out
Build
succeeded will appear on the screen. Select the PIC simulator
IDE from the desktop.
The file select menu from the menu bar and load the
hexafile.
Select the tools from menu bar and select corresponding
hardwaredisplays.
Select the simulation to start the program.
The output is displayed on LEDS.
-
7/30/2019 cerlog programs
23/60
PROGRAM
LIST P= PIC16F877A
INCLUDE "P16F877A.INC"ORG 0X00
BSF STATUS,RP0
BCF STATUS,RP1MOVLW 0X00
MOVWF TRISB
BCF STATUS,RP0LOOP:MOVLW 0X80
MOVWF PORTB
CALL DELAY
MOVLW 0X90
MOVWF PORTBCALL DELAY
MOVLW 0X40MOVLW PORTB
CALL DELAY
MOVLW 0X48MOVWF PORTB
CALL DELAY
MOVLW 0X80MOVWF PORTB
CALL DELAY
MOVLW 0XA0MOVWF PORTBCALL DELAY
MOVLW 0X84
MOVWF PORTBCALL DELAY
MOVLW 0X40
MOVWF PORTBCALL DELAY
GOTO LOOP
DELAY: MOVLW 0X80
MOVWF 0X20WAIT: DECFSZ 0X20,F
GOTO WAIT
RETURNEND
-
7/30/2019 cerlog programs
24/60
RESULT:
-
7/30/2019 cerlog programs
25/60
Thus the elevator controller using embedded controller PIC
16F877A is
implemented
BLOCK DIAGRAM
Fig 3.1
-
7/30/2019 cerlog programs
26/60
FLOW CHART
Fig 3.2
-
7/30/2019 cerlog programs
27/60
LED POSITION
G0 : Lift available at ground floor
F0 : Lift available at first floorG1 : Switch outside the lift
at ground floor
F1 : Switch outside the lift at first floor
G2 : Switch inside the lift at ground floor
F2 : Switch inside the lift at first floor
G3 : unused switch for ground floor
F3 : unused switch for first floor
LOGIC OF THE PROGRAM
Fig 3.3
Step 1: Lift is at ground floor.
1 0 0 0 0 0 0 0 - 80HStep 2: Outside switch at first floor is
pressed.
1 0 0 1 0 0 0 0 - 90HStep 3: Now lift is at first floor.
0 1 0 0 0 0 0 0- 40HStep 4: Inside switch for ground floor is
pressed.
0 1 0 0 1 0 0 0 - 48HStep 5: Now lift is at ground floor.
1 0 0 0 0 0 0 0 - 80HStep 6: Outside switch at ground floor is
pressed.
1 0 1 0 0 0 0 0 - A0HStep 7: Inside switch for first floor is
pressed.
-
7/30/2019 cerlog programs
28/60
1 0 0 0 0 1 0 0 - 84HStep 8: Now lift is at first floor.
0 1 0 0 0 0 0 0 - 40H
OBSERVATION
-
7/30/2019 cerlog programs
29/60
Fig 3.4
-
7/30/2019 cerlog programs
30/60
OUTPUT
Fig 3.5
.
-
7/30/2019 cerlog programs
31/60
PROGRAM
#INCLUDE"P16F877A.INC"
M EQU 0X20H EQU 0X21
LSD EQU 0X22
MSD EQU 0X23L_MIN EQU 0X24
M_MIN EQU 0X25
L_HOUR EQU 0X26M_HOUR EQU 0X27
D1 EQU 0X28
D2 EQU 0X29MIN EQU 0X2A
HOUR EQU 0X2BA_MIN EQU 0X2C
A_HOUR EQU 0X2DORG 0X00
GOTO MAIN
ORG 0X04RETFIE
MAINCLRF M
CLRF H
CLRF MSDCLRF LSD
MOVLW 0X25
MOVWF A_MIN
MOVLW 0X05MOVWF A_HOUR
BANKSEL TRISBCLRF TRISB
banksel TRISD
clrf TRISD
banksel TRISCCLRF TRISC
BANKSEL PORTB
BSF PORTB,6CLRF STATUS
L1INCF M: INCREMENT MINUT
-
7/30/2019 cerlog programs
32/60
MOVF M,W
CALL HDMOVF LSD,W
MOVWF L_MIN
MOVF MSD,WMOVWF M_MIN
SWAPF M_MIN,WIORWF L_MIN,W
MOVWF MIN
CALL ALARMMOVLW 0X01
MOVWF PORTC
MOVF L_MIN,W
CALL ASSIGNMOVWF PORTD
CALL DELAY
MOVLW 0X02
MOVWF PORTCMOVF M_MIN,W
CALL ASSIGN
MOVWF PORTD
CALL DELAY
MOVF M,WSUBLW 0X3C
BTFSS STATUS,2
GOTO L1
INCF H ;INCREMENT HOUR
MOVF H,W
CALL HDMOVF LSD,W
MOVWF L_HOUR
MOVF MSD,WMOVWF M_HOUR
MOVLW 0X04MOVWF PORTC
MOVF L_HOUR,W
CALL ASSIGN
MOVWF PORTD
-
7/30/2019 cerlog programs
33/60
CALL DELAY
MOVLW 0X08MOVWF PORTC
MOVF M_HOUR,W
CALL ASSIGNMOVWF PORTD
CALL DELAY
SWAPF M_HOUR,W
IORWF L_HOUR,W
MOVWF HOUR
CLRF M
MOVF H,WSUBLW 0X17
BTFSS STATUS,2GOTO L1
GOTO MAIN
HD
CLRF MSD
MOVWF LSD
MOVLW 0X0A
LOOP
INCF MSDSUBWF LSD,F
BTFSC STATUS,0
GOTO LOOPDECF MSD,F
ADDWF LSD,F
RETURN
ALARM
SUBWF A_MIN,WBTFSS STATUS,2
RETURN
MOVF HOUR,WSUBWF A_HOUR,W
BTFSS STATUS,2
RETURN
BANKSEL PORTB
-
7/30/2019 cerlog programs
34/60
BSF PORTB,7
RETURN
ASSIGNADDWF PCL,1
RETLW 0X3F
RETLW 0X06RETLW 0X5B
RETLW 0X4F
RETLW 0X64RETLW 0X6D
RETLW 0X7D
RETLW 0X07
RETLW 0X7FRETLW 0X6F
DELAY
MOVLW 0X01
MOVWF D1L3
MOVLW 0X02
MOVWF D2L4
DECFSZ D2,1
GOTO L4
DECFSZ D1,1GOTO L3
RETURNEND
RESULT:
-
7/30/2019 cerlog programs
35/60
Thus the alarm clock using embedded controller PIC 16F877A
is
implemented.
FRONT PANEL DISPLAY:
Fig 4.1
SEVEN SEGMENT DISPLAY:
Fig 4.2
-
7/30/2019 cerlog programs
36/60
OBSERVATION
Fig 4.3
-
7/30/2019 cerlog programs
37/60
OUTPUT
Exp: 5Date:
IMPLEMENTATION OF MODEL TRAIN CONTROLLERUSING EMBEDDED
MICROCONTROLLER (PIC16F877A)
AIM:
To implement model train controller using embedded
microcontroller
PIC18F877A.
TOOLS:
MPLAB.IDE package PIC Simulator
THEORY:
The signal message to the train is given with a help of a
control attached to
the tracks, the control such as Throttle, Emergency stop button
and so on. Thetrain receives electrical power from the two rails
and the tracks. The control boxes
-
7/30/2019 cerlog programs
38/60
can senses signal to the train over the tracks by modulating the
power supply
voltage.
The control panel sense packet over the tracks to the receiver
on the train.
The train includes analog electro routes to the packets being
transmitted under
control system to act the train motor speeds and direction based
on thosecommand.
Each packet involves so that the console can control several
train on thesame tracks. The packet has a error correction code to
guard against transmission
errors. The model train can not send commands and back to the
user.
PROCEDURE:
Select the MPLAB icon from the desktop.
Select the FILE menu from the menu bar and then select NEW.
Enter the program and save it with .ASM extension. Select the
project from menu bar and then select project wizard, then
select the device PIC16F877A and click next and next.
Enter the project name and enter the project directory.
Now add the saved program to project as source files.
Select project and click BUILDALL, if coding is switch out
Build
succeeded will appear on the screen.
Select the PIC simulator IDE from the desktop.
The file select menu from the menu bar and load the
hexafile.
Select the tools from menu bar and select corresponding
hardware
displays.
Select the simulation to start the program.
The output is displayed on LEDS.
PROGRAM:
LIST P= PIC16F877A
INCLUDE "P16F877A.INC"ORG 0X00
BSF STATUS,RP0
BCF STATUS,RP1
MOVLW 0X00MOVWF TRISB
BCF STATUS,RP0
LOOP: MOVLW 0XA0;0X80MOVWF PORTB
CALL DELAY
MOVLW 0XB0;0X90MOVWF PORTB
-
7/30/2019 cerlog programs
39/60
CALL DELAY
MOVLW 0X40
MOVLW PORTBCALL DELAY
MOVLW 0X90;0X48MOVWF PORTB
CALL DELAY
MOVLW 0X94;0X80MOVWF PORTB
CALL DELAY
MOVLW 0X40;0XA0
MOVWF PORTBCALL DELAY
MOVLW 0X84
MOVWF PORTB
CALL DELAYMOVLW 0X85;0X40
MOVWF PORTBCALL DELAY
MOVLW 0X40
MOVWF PORTBCALL DELAY
MOVLW 0X81
MOVWF PORTB
CALL DELAYMOVLW 0XA1
MOVWF PORTB
CALL DELAYMOVLW 0X40
MOVWF PORTB
CALL DELAYMOVLW 0XA0
MOVLW PORTB
CALL DELAY
GOTO LOOP
DELAY: MOVLW 0X80MOVWF 0X20
WAIT: DECFSZ 0X20,F
GOTO WAITRETURN
END
-
7/30/2019 cerlog programs
40/60
RESULT:
Thus the model train controller using embedded microcontroller
with
PIC16F877A is implemented
MODEL TRAIN CONTROLLER:
-
7/30/2019 cerlog programs
41/60
Fig 5.1
FLOW CHART:
-
7/30/2019 cerlog programs
42/60
Fig 5.2
-
7/30/2019 cerlog programs
43/60
Fig 5.3
Step 1: Train stops at station 1.
1 0 1 0 0 0 0 0 - A0HStep 2: Train has to go to station 2.
1 0 1 1 0 0 0 0 - B0HStep 3: Train is moving.
0 1 0 0 0 0 0 0 - 40HStep 4: Train reaches and stops at station
2.
1 0 0 1 0 0 0 0 - 90HStep 5: Train has to go to station 4.
1 0 0 1 0 1 0 0 - 94HStep 6: Train is moving.
0 1 0 0 0 0 0 0 - 40HStep 7: Train reaches station 4 and
stops.
1 0 0 0 0 1 0 0 - 84HStep 8: Train has to go to station 6.1 0 0
0 0 1 0 1 - 85H
Step 9: Train is moving.
0 1 0 0 0 0 0 0 - 40H
Step 10: Train reaches station 6 and stop.
0 0 0 0 0 0 0 0 - 81HStep 11: Train has to go to station 1.
1 0 1 0 0 0 1 0 - A1HStep 12: Train is moving.
0 1 0 0 0 0 0 0 - 40HStep 13: Train reaches station 1 and
stops.
1 0 1 0 0 0 0 0 - A0H
-
7/30/2019 cerlog programs
44/60
OBSERVATION
-
7/30/2019 cerlog programs
45/60
-
7/30/2019 cerlog programs
46/60
-
7/30/2019 cerlog programs
47/60
Fig 5.4
-
7/30/2019 cerlog programs
48/60
OUTPUT:
Fig 5.5
-
7/30/2019 cerlog programs
49/60
PIC SIMULATION OUTPUT
Fig 5.6
-
7/30/2019 cerlog programs
50/60
Exp: 6
Date:
SYSTEM DESIGN USING PHASED LOCKED LOOP (PLL)
AIM:
To implement system design using pll
TOOL REQUIRED:
Xilinx ISE 9.1i,
FPGA Kit
THEORY:
A Phase locked loop is a control system that tries to generate
an outputsignal whose phase is related to phase of the input
reference signal.It is an
electronic circuit consisting of variable frequency oscillator
and a phase detector.This circuit compares the phase of the input
signal with the phase of the signal
derived from its output oscillator and adjusts the circuit of
its oscillator to keepthe phase match. The signal from phase
detector is used to control the oscillator in
a feed back loop,
PROCEDURE:
Create a new project in Xilinx.
Create a verilog module in it and enter the coding for pll.
Synthesize the program and create the RTL schematic.
Add a test bench module to the project.
Write a test bench to test various combinations of the input in
the
program.
Simulate the test bench and view the output waveform.
-
7/30/2019 cerlog programs
51/60
VERILOG PROGRAM:
module DPLL(sys_clock,
reset,
enable,Fin,
Fout,
Kmode);
input sys_clock,
reset,enable,
Fin;
input[2:0] Kmode;
output Fout;
wire se,
carry,borrow,IDclock,
IDout;
reg[2:0] cnt_H; // H =8reg[5:0] cnt_N; // N =32
/*********** Phrase Detector ***********/
xor cmp(se, Fin, Fout);
/*********** DLF ***********/k_counter
k_counter(.Kclock(sys_clock),.reset(reset),
.dnup(se),
.enable(enable),
.Kmode(Kmode),
.carry(carry),
.borrow(borrow));
reg q1,q2,
carry_out;wire clr = carry_out;
always @(posedge carry or negedge reset)
if(~reset|clr)q1
-
7/30/2019 cerlog programs
52/60
if(~reset)
q2
-
7/30/2019 cerlog programs
53/60
endmodule
K_COUNTER:
module k_counter(Kclock,
reset,dnup,enable,
Kmode,
carry,borrow
);
input Kclock,
reset,dnup,
enable;
input[2:0] Kmode;
output carry,borrow;
reg[8:0] count;
reg[8:0] Ktop;
always @(Kmode)
begin
case(Kmode)
3'b001: Ktop = 7;3'b010: Ktop = 15;
3'b011: Ktop = 31;
3'b100: Ktop = 63;3'b101: Ktop = 127;
3'b110: Ktop = 255;
3'b111: Ktop = 511;default:Ktop = 15;
endcase
end
always @(posedge Kclock or negedge reset)
begin
if(~reset)count
-
7/30/2019 cerlog programs
54/60
else
count
-
7/30/2019 cerlog programs
55/60
);
FFD FFD3(.clock(IDclock),
.reset(reset),
.D(Q1),
.Q(Q3),
.Q_not(Qn3));
FFD FFD4(.clock(IDclock),
.reset(reset),
.D(Q2),
.Q(Q4),
.Q_not(Qn4)
);FFD FFD5(.clock(IDclock),
.reset(reset),
.D(Q3),
.Q(Q5),.Q_not(Qn5)
);FFD FFD6(.clock(IDclock),
.reset(reset),
.D(Q4),
.Q(Q6),
.Q_not(Qn6)
);
assign D7=((Q9 & Qn1 & Q3) | (Q9 & Q5 &
Qn3));
assign D8=((Qn9 & Qn2 & Q4) | (Qn9 & Q6 &
Qn4));
FFD FFD7(.clock(IDclock),
.reset(reset),
.D(D7),
.Q(Q7),
.Q_not(Qn7)
);
FFD FFD8(.clock(IDclock),.reset(reset),
.D(D8),
.Q(Q8),
.Q_not(Qn8)
);
JK FFJK(.clock(IDclock),.reset(reset),
.J(Qn7),
.K(Qn8),
.Q(Q9),
-
7/30/2019 cerlog programs
56/60
.Q_not(Qn9)
);
assign IDout = ~((IDclock)|Q9);
endmodule
D_FLIPFLOP:
module FFD(clock,
reset,
D,Q,Q_not
);
input clock,
reset,D;
output Q,Q_not;
reg Q;
always @(posedge clock or negedge reset)
if(~reset)
Q
-
7/30/2019 cerlog programs
57/60
always @(posedge clock or negedge reset)
if(~reset)
Q
-
7/30/2019 cerlog programs
58/60
RESULT:
-
7/30/2019 cerlog programs
59/60
System design using PLL is done using verilog and output
verified.
BLOCK DIAGRAM:
Fig 6.1
RTL SCHEMATIC:
Fig 6.2
-
7/30/2019 cerlog programs
60/60
SCHEMATIC DIAGRAM (ID_COUNTER)
Fig 6.3OUTPUT WAVEFORM:
Fig 6.4