Embed Size (px)
DESCRIPTION
Co Hoc Vat Bay PGS.lequang
Citation preview

1
MỤC LỤC
CHƯƠNG1: NHỮNG TÍNH CHẤT VẬT LÍ CƠ BẢN CỦA CHẤT LỎNG VÀ CHẤT KHÍ 1 1.1. Tính chất chung của chất lỏng và chất khí 1 1.2. Các đại lượng vật lí 2 1.3. Các phương trình cơ bản 9 1.4. Lực cản 12 CHƯƠNG 2: CÁC CHẾ ĐỘ BAY KHÁC NHAU. 15 2.1. Các trục tọa độ. 15 2.2. Chế độ bay ngang đều 18 2.3. Chế độ bay lên đều 19 2.4. Chế độ chuyển động bay xuống đều 21 2.5. Chế độ cất cánh 23 2.6. Chế độ hạ cánh 26 2.6.1. Hệ số tải trọng 26 2.6.2. Chế độ bay liệng chuẩn ( Virage ). 26 2.7. Đồ thị tọa độ cực và các điểm bay đặc biệt 28 2.7.1. Đường lực nâng và đường đặc tính cực (Polaire) của máy bay 28 2.7.2. Đường đặc tính “Máy bay” 29 2.7.3. Đường đặc tính động cơ 30 2.7.4. Đường đặc tính tổng hợp động cơ_ máy bay 33 CHƯƠNG 3: ỔN ĐỊNH VÀ ĐIỀU KHIỂN MÁY BAY 40 3.1. Các hệ trục toạ độ 40 3.1.1. Hệ toạ độ cố định Oxyz gắn cố định với mặt đất. 40 3.1.2. Hệ trục chuyển động tịnh tiến cùng máy bay 40 3.1.3. Hệ trục gắn cố định với máy bay 40 3.1.4. Hệ tọa độ không tốc 40 3.1.5. Hệ tọa độ địa tốc hay hệ toạ độ quỹ đạo 40 3.2 Ổn định tĩnh trong chuyển động dọc của máy bay 43 3.2.1. Mômen khí động tác dụng lên cánh trong chuyển động dọc trục 43 3.2.2. Mômen khí động tác dụng lên đuôi ngang của máy bay trong chuyển động dọc 45 3.3.3. Momen khí động tác dụng lên thân máy bay trong chuyển động dọc 48 3.3.4. Momen do lực đẩy của động cơ 48 3.2.5. Sự ổn định dọc tĩnh của máy bay 49 3.2.6. Điểm trung hoà 51 3.3 Sự điều khiển chuyển động dọc của máy bay 52 3.3.1. Các mặt điều khiển 52 3.3.2. Điều khiển chuyển động dọc băng đuôi lái ngang 52 3.3.3. Góc của đuôi lái ngang lúc bay ổn định 54 3.3.4. Sự ổn định hướng của máy bay 54 3.3.5. Sự điều khiển hướng máy bay 56 3.3.6. Sự ổn định nghiêng 57 3.3.7. Sự điều khiển độ nghiêng 59 3.4. Các phương trình chuyển động cơ bản 60 3.4.1. Các phương trình cơ bản 60 3.4.2. Phương pháp tuyến tính hoá để giải các phương trình động lực học bay 62 3.4.3. Tính toán hệ số đạo hàm khí động 66

2
3.4.4. Phương trình chuyển động dưới dạng ma trận 71 CHƯƠNG 4: ỔN ĐỊNH ĐỘNG HỌC MÁY BAY 78 4.1. Một số khái niêm cơ bản 78 4.1.1. Biên độ phức của hàm điều hoà 78 4.1.2. Biên độ phức của hàm bất kỳ. Phép biến đổi Fourier 78 4.1.3. Phép biến đổi Laplace 79 4.2. Tính chuyển động dọc của máy bay 80
4.2.1. Ma trận hàm truyền và ma trận độ cứng khí động của máy bay trong chuyển động dọc trục 80 4.2.2. Tính chuyển động dọc của máy bay dưới tác động của không khí bị nhiễu động 82 4.2.3. Tính dao động dọc tự do của máy bay lúc không có điều khiển 83 4.2.4. Dao động dọc trục của máy bay khi có điều khiển đuôi lái ngang δe 85 4.2.5. Tiêu chuẩn đánh giá tính chất lượng máy bay 86 ÁP DỤNG KHẢO SÁT ỔN ĐỊNH ĐỘNG HỌC MÁY BAY 91 1. Các thông số của máy bay 91 2. Phân tích chất lượng máy bay 93

3
CHƯƠNG1: NHỮNG TÍNH CHẤT VẬT LÍ CƠ BẢN CỦA CHẤT LỎNG VÀ CHẤT KHÍ
Lực khí động và mô men tác động vào vật thể bay phụ thuộc vào kích thước hình học của vật bay, vận tốc cũng như tính chất xung quanh vật bay. Khi nghiên cứu Cơ học vật bay, chúng ta phải quan tâm tới tính chất vật lí của chất khí như áp suất, nhiệt độ, khối lượng riêng, độ nhớt, vận tốc âm thanh ở độ cao mà vật bay chuyển động. 1.1. Tính chất chung của chất lỏng và chất khí Chất lỏng là một dạng vật chất được đặc trưng bởi hai đặc điểm, đó là nó có thể tích và không có hình dạng nhất định. Chất lỏng có khả năng chống nén tương đối lớn, nghĩa là nó thay đổi thể tích rất ít, khi thay đổi áp suất và nhiệt độ. Mặt khác, do lực liên kết giữa các phần tử không lớn lắm nên nó chống lại rất yếu các biến dạng trượt. Tính chất này làm nó không có hình dạng riêng của mình, mà luôn mang hình dạng của vật chứa nó. Điều này làm cho chất lỏng có tính chất giống như chất khí. Chất lỏng khác chất khí ở chỗ, nó còn phần nào chống lại lực kéo dãn. Trong khi đó chất khí hoàn toàn không có khả năng này. Điều này có thể giải thích là do lực tác dụng tương hỗ giữa các phẩn tử khí nhỏ hơn rất nhiều so với trong chất lỏng. Chính vì vậy chất khí không chỉ có khả năng điền đầy bất cứ khoảng không nào chứa nó, mà còn có thể thu nhỏ đáng kể thể tích của mình khi chịu áp suất lớn. Ở những điều kiện nhiệt độ cao và áp suất thấp thì các tính chất của chất lỏng và chất khí hoàn toàn giống nhau. Khoảng cách giữa các phần tử chất khí thường rất lớn so với kích thước phân tử của chất khí. Do vậy khí nghiên cứu chất khí người ta thường bỏ qua thể tích của các phân tử và lực tác dụng tương hỗ giữa chúng. Mô hình khí như vậy được gọi là khí lí tưỏng. Mặc dầu trong thực tế không có khí lí tưởng, tuy nhiên khi nhiết độ cao và áp suất thấp thí các chất khí thực rất giống khí lí tưởng. Trong khí động học, mọi tính toán đều được thực hiện trên mô hình lí tưởng và kết quả thu được vẫn hoàn toàn phù hợp với thực tế. Mặc dù môi trường khí là môi trường rời rạc. Nhưng khi nghiên cứu chuyển động của chất khí và sự tác dụng tương hỗ giữa chất khí và vật thể chuyển đông, trong đó người ta vẫn coi chất khí là môi trường liên tục. Đây là giả thiết về tính liên tục của môi trường khí do Đalămbe đưa ra vào năm 1744 và Ơle đưa ra vào năm 1753. Nhờ các giả thiết liên tục này mà người ta có thể coi các đặc trưng của dòng khí là những hàm liên tục của toạ độ không gian và thời gian. Do đó có thuận lợi trong việc sử dụng các công cụ toán học. Đối với không khí loãng, khi mà quãng đường tự do của các phân tử khí tương đương với kích thước của vật chảy bao. Giả thiết liên tục này không còn đúng nữa.

4
1.2. Các đại lượng vật lí 1- Áp suất : áp suất là áp lực tác dụng vuông góc lên một đơn vị diện tích. Áp suất trung bình được tính theo công thức sau :
FAp (1.1)
F : lực theo phương pháp tuyến (n) A : diện tích (m2) Quan hệ giữa áp suất p, khối lượng riêng và nhiệt độ T được thể hiện trong phương trình trạng thái p = rT (1.2) Trong đó r là hằng số chất khí. Đối với không khí r = 287 J/kg.K 2- Nhiệt độ : Nhiệt độ của không khí là một thông số quan trọng vì nó ảnh hưởng trực tiếp đến các tính chất vật lí của không khí như khối lượng riêng và độ nhớt. Khi nhiệt độ tăng đối với chất khí, chuyển động của các phân tử mạnh lên, do đó độ nhớt cũng tăng lên. Còn đối với chất lỏng như nước hoặc dầu, khi nhiệt độ tăng lên, lực liên kết giữa các phân tử giảm, dẫn tới độ nhớt giảm. Điều đó có nghĩa khi máy bay chuyển động với vận tốc lớn, ma sát giữa dòng khí với vật rắn sinh nhiệt lớn, làm cho hệ số nhớt tăng. Lúc này mô hình chất khí không nhớt sẽ không còn chính xác nữa và việc khảo sát chất khí nhớt coi là bắt buộc. Để đo nhiệt độ người ta dùng thang độ Kelvin (oC) hay Rankine (oK). Quan hệ giữa hai thang độ đó là : T0K = T0C + 273 (1.3) Trong tầng đối lưu nhiệt độ trung bình giảm 6,5 độ khi độ cao tăng 1000 m. Bề dầy tầng đối lưu được xác định từ mặt đất đến chỗ kết thúc quá trình giảm nhiệt độ. Bề dầy này thay đổi theo vĩ độ và theo mùa. Cụ thể ở vùng nhiệt đới bề dầy này vào khoảng 17-18 km, còn lại ở hai cực của Trái đất bề dầy của tầng đối lưu là 8 km. Người ta thường lấy trung bình bề dầy tầng đối lưu là 11 km và vì thế nhiệt độ ở mặt trên tầng đối lưu là khoảng 216 OK ( tức là - 56 OC ) Những quy luật thay đổi các thông số trong Khí quyển chuẩn thường được thiết lập trên cơ sở các số liệu thống kê thực tế. Chúng có dạng :
- Đối với tầng đối lưu : T = TO - 0,0065.Z ( km)
110006340
110006340
11
11
Z
Z
p p e
e
(1.4)
- Đối với tầng bình lưu T11 = 216,5OK = const (1.5) Trong đó T11, P11 và 11 là các thông số ứng với độ cao 11 km

5
Hình 1.1: Nhiệt độ thay đổi theo độ cao trong lớp khí quyển
3- Khối lương riêng, trọng lượng riêng, tỷ trọng - Khối lượng riêng là khối lượng của một đơn vị thể tích chất lỏng ( z là chỉ số chỉ độ cao, M là khối lượng (kg), V là thể tích của chất lỏng ( m3).
28
11
22
216.
Hình 1.2 : Nhiệt độ thay đổi đến độ cao 22km
Z km
T(K)
1km
6.5o

6
3[ ]KgMZ V m
(1.6)
z là độ cao (km). Với t=150 và z=0 => - Trọng lượng riêng là trọng lượng của một đơn vị thể tích chất lỏng:
3[ ]Mg NZ V m (1.7)
-Tỷ trọng là tỷ số giữa khối lượng ( trọng lượng) của không khí ở độ cao z và khối lượng ( trọng lượng) của không khí ở mặt đất z= 0 km.
(1.8)
z là độ cao đo bằng km.
4- Tính nén của chất lỏng : là khả năng thay đổi khối lương riêng thí dụ khi áp suất thay đổi. Để biểu diễn độ nén ta dùng tỷ số
Thứ nguyên của tỷ số
1 2
32 2dp ML T
d MLL T
(1.9)
có thứ nguyên là vận tóc bình phương và đó chính là vận tốc âm bình phương
=> vận tốc âm. (1.10)
Nếu giả thiết không có sự trao đổi nhiệt bên ngoài và không có tổn hao, ta có thể sử dụng định luật Poisson trong trường hợp này:
(1.11)
Cho chất lỏng là không khí.
Cp: Nhiệt dung riêng đẳng áp ( Cho không khí Cp = 1000) Cv: Nhiệt dung riêng đẳng tích ( Cho không khí Cv = 713) r = (Cp – Cv): Hằng số chất khí ( Cho không khí: r=1000-713=287) a (m/s): Vận tốc âm cho không khí được tính như sau :
(1.12)

7
- Số Mach (M): Tỷ số giữ vận tốc dòng khí và vận tốc truyền âm
0 < M < 0.5 : dòng chảy dưới âm chất lỏng không nén được 0.5 < M < 0.8 : dòng chảy dưới âm chất lỏng nén được 0.8 < M < 1.2 : dòng chảy cận âm 1.2 < M < 5 : dòng chảy trên âm M > 5 : dòng chảy siêu âm
5- Tính nhớt - số Reynolds và lớp biên : - Tính nhớt là khả năng của chất lỏng có thể chống lại lực trượt, nói cách khác nó đặc trưng cho mức độ di động của chất lỏng.
Khi chất lỏng chuyển động, nó chảy thành từng lớp với vận tốc khác nhau, do đó trượt lên nhau. Giữa chúng xuất hiện lực ma sát gọi là nội ma sát hay ma sát trong. Đặc tính của chất lỏng gây ra lực ma sát trong gọi là tính nhớt và lực ma sát gọi là lực nhớt. Theo Newtơn ứng suất nhớt được xác định bởi biểu biểu toán học sau:
2[ / ]duT
S dn N m (1.13) Trong đó: T là lực nhớt, du/dn là gradient vận tốc theo phương n vuông góc với hướng dòng chảy, là hệ số nhớt động lực (hệ số được đo bằng Poazơ (P), 1P = 10-
1Ns/m2). Giả thiết cho hai dòng khí chuyển động gần nhau có khoảng cách dn với các vận tốc u và u+du, ta sẽ xét một thành phần diện tích tiếp xúc dS.
Nếu dòng là lý tưởng thì sẽ không có lực nhớt, nhưng trong thực tế với dòng chẩy thực thì sẽ xuất hiện một thành phần lực nhớt:
nudSdF
.. (1.14)
Ta thấy lực nhớt này tỉ lệ với diện tích tiếp xúc, gradien vận tốc và hệ số nhớt ,. Độ nhớt của một chất khí phụ thuộc vào nhiệt độ tính theo công thức gần đúng
sau :76,0
00
TT
cho không khí với được tính bằng Poazơ (Poiseulle) hoặc Pa.s
Với chất khí: 60 10.15,17 Poazơ ở nhiệt độ T0= 2730K

8
610.89,17 Poazơ ở nhiệt độ T0= 273+150K
- Chú ý rằng độ nhớt của chất khí giảm theo nhiệt độ do vậy sẽ giảm theo chiều cao.
Như vậy cho độ cao kmZ 11 , T= (288-56)0K và 610.21,14 . - Nếu mỗi chất khí được đặc trưng bởi 0 của nó, công thức này sẽ không đúng
đối với chất lỏng như nước hoặc dầu. Đối với chất lỏng này, độ nhớt sẽ giảm khi nhiệt độ tăng (dầu của động cơ vào mùa đông sẽ tốt hơn trong mùa hè).
- Số Reynolds là số không thứ nguyên diễn tả tỷ số giữ lực của áp suất động lực học và lực nhớt
LV
e.
V : vận tốc của máy bay hoặc của điểm cần xét (m/s) L : độ dài dây cung hay toạ độ điểm cần xét đến (m).
: độ nhớt động học (m2/s).
Độ lớn của số Reynold trong chuyển động bay của máy bay khoảng 104 dến 107. - Số Reynolds cục bộ: khi thay L = x là toạ độ của điểm cần xét. Như vậy mỗi điểm của đường dòng chảy bao cánh có một số Reynolds khác nhau.
Ví dụ: tại A: .e 0
tại B:
be
xV .
Với profil :
ce
xV .
Với một hình cầu :
.V
e cũng giống với một ống có đường kính .
- Lớp biên Ta biết rằng, khi chất lỏng thực bao quanh một vật đứng yên, do tính nhớt nên các
lớp sát thành dính vào bề mặt vật. Vì vậy, vận tốc của dòng chảy trên mặt vật bằng không. Khi ra xa vật theo phương phấp tuyến với bề mặt, vận tốc sẽ tăng dần và tại khoảng cách nào đó, kí hiệu là , nó sẽ gần bằng vận tốc của dòng bên ngoài
~0,995u u . Lớp chất lỏng có chiều dày đó được gọi là lớp biên. Độ dày phụ thuộc vào vị trí điểm xét đến ở trên mặt vật. Độ dày lớp biên sẽ phát triển từ thượng lưu (khoảng vài mm) đến hạ lưu ( khoảng vài cm) của mặt vật.

9
Ảnh hưởng của nhớt chỉ tồn tại ở lớp mỏng sát với thành vật. Đối với dòng ở bên ngoài lớp biên, dòng không chịu ảnh hưởng của lực nhớt. Phân bố vận tốc của lớp biên chảy tầng và chảy rối cũng khác nhau. Năng lượng của lớp biên rối lớn hơn nhiều so với lớp biên chảy tầng.
- Dòng chảy tầng và chảy rối:
Với cùng vận tốc, Gradien vận tốc nV trong trường hợp chảy rối lớn
hơn do vậy gần thành mỏng => ứng suất tiếp sẽ lớn hơn. Ở cùng vận tốc : lamiturb . Trong trường hợp chảy rối, ở rất gần thành vật sẽ xuất hiện một lớp
chảy tầng rất mỏng dưới nó có chiều dày turbLL % 1 . - Đặc tính cơ bản của lớp biên:
constVP 2. 2
V giảm chiều dày lớp biên. P được bảo toàn trên chiều dài cơ bản. - Dòng chảy trên tấm phẳng: V và P là không đổi trên chiều dài tấm tại góc tới bằng 0.
Với số Re nhỏ, ta có dòng chảy tầng. Ta có dạng độ dày lớp biên:
xe
.92,4

10
biến bậc hai của x
.
với x cho trước: nếu V . - Lớp biên trên mặt cong:
Khi dòng chảy bao quanh mặt cong thường xảy ra hiện tượng khá quan trọng : xuất hiện điểm rời của lớp biên.
Ta khảo sát dòng bao quanh mặt cong AB (hình vẽ): hình 1.6. Giả sử áp suất của dòng ngoài dọc AB lúc đầu giảm, đạt giá trị cực tiểu ở M rồi sau
đó tăng. Miền dòng ngoài mà tại đó građien áp suất âm ( 0
xp ) gọi là điểm thu hẹp
dần. Miền chuyển động sau điểm M có građien áp suất dương ( 0
xp ) gọi là điểm mở
rộng dần. Tại miền thu hẹp dần dòng ngoài sẽ tăng tốc, còn ở miền rộng dần dòng sẽ bị hãm. Vì trong lớp biên, 0
xp , nên có thể kết luận là phân bố áp suất cũng sẽ tương
tự như thế trong bất kỳ khoảng cách y - trong lớp biên trên đoạn AB. Trong phạm vi lớp biên, vận tốc điểm M sẽ tăng, còn sau M thì giảm. Đến mặt cắt S nào đó, các phần tử chất lỏng ở sát bề mặt AB không thể thắng ảnh hưởng hãm của dòng ngoài và chúng bị dừng lại. Tại S sẽ có:
00
yyu

11
Sau điểm S, dưới tác dụng của độ chênh áp suất ngược chiều dòng chảy, các phần tử ở sát bề mặt AB sẽ bắt đầu chuyển động ngược, gọi là dòng thứ cấp. Gặp dòng chính, dòng thứ cấp sẽ bị đẩy ra khỏi bề mặt AB, dẫn đến hiện tượng tách rời lớp biên. Điểm S được gọi là điểm rời của lớp biên. 1.3. Các phương trình cơ bản 1. Phương trình liên tục dạng tổng quát
0)( Vdiv
t
(1.15)
2. Phương trình bảo toàn động lượng
)(. pgradVVgradtV
DtVD
(1.16)
3. Phương trình Becnulli cho chất lỏng lí tưởng
(1.17) 4. Phương trình Saint-Venant (1.18) 5.Phương trình Hugoniot (1885) (1.19)
Hình 1.7 : Dòng chảy qua ống phun
cteg
vpz 2
2
2
2ptVC T const
2( 1)dS dVMS V

12
M < 1: 1 – M2 > 0:
VdV
AdA
VdV
AdA
M > 1: 1 – M2 < 0:
VdV
AdA
VdV
AdA
M = 1: 1 – M2 = 0: 00 VdV
AdA
6. Quan hệ giữa nhiệt độ và vận tốc Nhiệt độ toàn phần Tt ( hoặc Ti) Nhiệt độ tĩnh T (có thể kí hiệu làTo hay Ts) Theo công thức Saint-Venant ta có :
20
0 2p p iVC T C T (1.20)
2
2oV
C pT i T o (1.21) Cho không khí, ta có Cp = 1000
2
2 0 0 0oVT i T o (1.22)
Thành lập hàm nhiệt độ theo số Mach
TCV
TT
p
t
21
2
a2 = rT
constKp ; rTppKp
11
2
22
2
2
211
221
21
aVV
CCC
ar
CV
TT
p
vp
p
t
1111
p
v
p
vp
CC
CCC
. Ta có M = V/a, do vậy ta có
)(2
111
2 MMTT
t
(1.23)
Cho = 1,4, công thức (1.31) có thể viết dưới dạng : Tt = Ts (1 + 0,2M2) (1.24)

13
7. Quan hệ giữa các thông số của dòng khí một chiều đoạn nhiệt
t
t
tt
ppTT
pp
;0
ttpp
trong đó:
1
t
t
t
t
tt pp
TT
1 11 1211
2t t
T MT
(1.25)
1211
2t t
p Mp
(1.26)
Các thông số gắn với chỉ số c gọi là các giỏ trị tới hạn (critique- những giỏ trị tại M = 1) Ta được:
12
t
c
aa ;
12
t
c
TT ;
11
12
t
c ; 1
12
t
c
pp
Lưu lượng cho bởi G = VA = cVcAc = cacVc, với:
Va
aa
aa
Va
AA t
t
ct
t
ccc
c
Do đó ta được:
)(2
111
21 )1(21
2)1(2
1
MfMMA
Ac
(1.27)
Hình 1. 8 : Quan hệ mặt cắt thiết diện ngang của ông phun với số M

14
1.4 Lực cản Phương pháp thông thường là ta tách riêng từng loại lực cản ra để tính rồi sau
đó kết hợp chúng lại. Việc này thường gây sai số khí tính lực cản. Do ảnh hưởng của tính nhớt mà các lớp biên trên các bộ phận tác động lẫn nhau tạo ra các lực cản khác nữa và được gọi là lực cản giao thoa. Trên thực tế, khoảng cách giữa các bộ phận, cường độ rối, độ nhám trên bề mặt... cũng ảnh hướng tới lực cản. Ta có thể viết phương trình lực cản của máy bay như sau:
D=k(DCánh+Dthân+Dvỏ động cơ +...) trong đó, k là hệ số giao thoa lực cản. Lực cản trên cánh là: 21
¸ 2c nh L ND C V S trong đó, SN là diện tích cánh, phần cánh chôn trong thân không tính đến ở đây. Lực cản của các thành phần khác cũng được tính tương tự, chia cho SV2
21 ta được hệ số lực cản:
...
SS
CS
SCS
SCkC codéngvácodéngváD
thanthanD
NcanhD
Trong đó, CDthân là hệ số lực cản của thân máy bay trên diện tích cánh Sthân, ... Lực cản thân phụ thuộc diện tích ướt, càng máy bay...
Dưới đây là một sơ đồ phân tích lực cản trên máy bay: hình 1.9.
Hình 1.9 : Các thành phần lực cản Khi xét lực cản biên dạng cánh ba chiều trong dòng chảy thực ta phải tính đến
lực cản cảm ứng. Do xải cánh là hữu hạn nên nó gây ra xoáy đầu cánh, ta có lực cản xoáy đầu cánh hay lực cản cảm ứng. Trong một dòng chảy có độ nhớt, việc xuất hiện lớp biên làm thay đổi đường dòng do đó nó gây ra lực cản, nó còn được gọi là lực cản áp suất vuông góc với bề mặt biên dạng profil cánh tuy nhiên tên thường gọi là lực cản biên dạng; với loại máy bay vận tốc thấp, tổng hợp lực ma sát bề mặt và lực cản biên dạng gọi chung là lực cản profil. Ảnh hưởng của lớp biên cũng làm giảm đường cong lực nâng của cánh do đó bề mặt của nó nghiêng hơn theo hướng chuyển động, ta có lực cản nhớt phụ thuộc lực nâng. Nếu vận tốc máy bay đủ lớn để xuất hiện sóng va thì xuất hiện một lực cản áp suất. Tại lực nâng bằng không, nó có tên gọi là lực cản sóng

15
do chiều dày, hiệu ứng góc tấn làm biến đổi sóng va gây nên một lực cản, lực cản sóng do lực nâng.
Hình 1.10: Sự biến thiên của hệ số cản ma sát trên mặt phẳng theo số Reynolds Vẫn có một số loại lực cản không có trên hình vẽ. Đầu tiên là lực cản do chảy
tràn, lực cản này sinh ra do tác động của dòng khí đi ra khỏi động cơ chảy bao quanh các thành phần khác của máy bay; nó là loại lực cản chỉ quan trọng trong trường hợp bay trên âm. Thứ hai, lực cản gây ra do điều khiển các thành phần khí động máy bay như các cánh tà, tấm cản lưng, cánh lái,...
Lực ma sát bề mặt trên cánh cũng được tính như trên các biên dạng phẳng với ảnh hưởng của số Reynolds và vị trí chuyển tiếp của lớp biên. Hình (1.11) minh hoạ sự biến thiên của hệ số ma sát bề mặt theo số Reynolds.
Tác động của dòng nén được tới lực cản
Hình 1.11: Quan hệ hệ số lực cản (CDo) với số M
Khi máy bay bay gần vận tốc âm, nếu tiếp tục tăng vận tốc, số Mach tăng lên sẽ xuất hiện sóng va trên lưng cánh và khi đó lực cản tăng rất nhanh. Số Mach mà tại đó hệ số lực cản (CDo) tăng đột ngột được gọi là số Mach tới hạn. Đồ thị của CDo tính theo

16
số Mach được minh hoạ trên hình 1.11. Số MDcrit phụ thuộc vào dạng cánh và góc mũi tên của cánh.
CDo đạt tới giá trị lớn nhất khi M=1, và sau đó giảm xuống, xem hình 1.12 Lực cản cảm ứng CDI phụ thuộc vào hệ số lực nâng CL, Ta có:
2LD bCaC
trong đó CDI = bCL2
Hình 1.12: Biến thiên của các loại hệ số lực cản với số M

17
CHƯƠNG 2: CÁC CHẾ ĐỘ BAY KHÁC NHAU.
2.1. Các trục tọa độ.
- Trong quá trình nghiên cứu chuyển động của máy bay, ta xét đến các hệ tọa độ sau:
Hệ tọa độ máy bay: Gx1y1z1.
Trục Gx1 trùng với trục máy bay.
Trục Gz1 vuông góc với Gx1 và nằm trong mặt phẳng đối xứng của máy bay.
x1
G
y1
z1
Hình 2.1. Hệ tọa độ máy bay.
Hệ tọa độ vận tốc: Gxyz.
Gx trùng với phương vận tốc V
của máy bay và nằm trong mặt phẳng đối xứng.
Gz vuông góc với Gx và nằm trong mặt phẳng đối xứng.
x1

18
G x
y
z
Hình 2.2. Hệ tọa độ vận tốc.
Hệ tọa độ không khí (so với mặt đất): GXYZ.
GX là phương ngang
GZ vuông góc với Gx và hướng thẳng đứng xuống dưới
G X
Z Y
Hình 2.3. Hệ tọa độ không khí.
- Từ các hệ tọa độ, ta có các khái niệm:
+ Góc bay ( Assiette): A=( X;x1 ).
+ Góc nghiêng (Pente) : = ( X;x ).
+ Góc tới (Incidence): =( x;x1).
x1
x
A
G X
V

19
Hình 2.4. Các góc liên hệ giữa các trục.
Như vậy, góc bay có giá trị bằng tổng giá trị góc tới và góc nghiêng.
A=+
Trong chế độ bay ngang: = 0 & A= ( tức là X trùng với x ).
Trong chế độ bay cất cánh: > 0 & A >0
Trong chế độ hạ cánh: < 0 & A< 0 .
+ Góc bay xiên ( Angle de dérapage).
Kí hiệu
Hình 2.5: Góc bay xiên
+ Góc bay liệng ( Angle de assiette latérale ).
Kí hiệu

20
Hình 2.6: Góc bay liệng
2.2. Chế độ bay ngang đều
Các giả thiết:
+ Máy bay bay đối xứng.
+ Góc tấn của profil cánh bằng góc tấn của máy bay (mb = c ).
+ Tâm đẩy trùng với trọng tâm của máy bay.
+ Chuyển động ngang đều thẳng V = const.
R Fz
Tu x1
Fx A= X
P
Z Hình 2.7: Chế độ bay bằng
- Ta có phương trình các lực tác dụng lên máy bay:
[2.1]
- Phân tích lực:
Chiếu phương trình [2.1] lên các trục ta được:
Trục Z: P = Fz + Tu . sin [2.2]
Trục X: Tu . cos = Fx [2.3]
Vì nhỏ nên có thể coi: cos 1 và sin 0 ,
Vậy ta có : P = Fz
Tu = Fx
0. amRTP u
2...21
PZZ VCSP
V

21
Hay [2.4]
[2.5]
VE vận tốc hiệu dụng ;
(Vp là vận tốc thực của máy bay).
(2.4),(2.5) sẽ tương đương với:
[2.6]
[2.7]
- Hệ số chất lượng bay f có giá trị:
[2.8]
Suy ra [2.9]
2.3. Chế độ bay lên đều
- Các giả thuyết:
+ Tâm áp trùng với trọng tâm máy bay.
+ Góc tấn của máy bay trùng với góc tấn của cánh.( nhỏ )
+ Máy bay bay trong mặt phẳng đối xứng.
2...21
PXZU VCST
.PE VV 0
z
20 ...
21
EZVCSP
20 ...
21
EXU VCST
X
Z
U CC
TPf
fPTU

22
Hình.2.8: Chế độ bay lên đều
- Phương trình lực:
[2.10]
- Phân tích lực, chiếu phương trình lên hệ tọa độ Gx1y1z1 của máy bay ta có:
Chiếu lên trục z:
[2.11]
Chiếu lên trục x:
[2.12]
Suy ra : [2.13]
[2.14]
- Các đại lượng đặc trưng. Đặc tính bay lên của máy bay đặc trưng bởi:
- Vận tốc nâng Vz ( vario):
Từ các kết quả ở trên ta có
[2.15]
[2.16]
Vz Vp
Wu: Công suất hiệu dụng của động cơ.
Wn: Công suất cần thiết của máy bay.
- Độ nghiêng của chuyển động bay lên đều ( ): Vx
0. amRTP u
0coscos PR
0sinsin RPTU
cosPFZ
XU FPT sin
nZu
ZxzZU
WVPWVFPVVT
..sin.
PW
PWWV nu
Z

23
[2.17]
Thông thường rất nhỏ (<10) nên có thể coi cos 1.
Như vậy
[2.18]
(với f là hệ số chất lượng bay)
- Nhận xét:
Ta thấy vận tốc nâng Vz đạt giá trị max khi W= Wu- Wn đạt giá trị min.
(Tương đương với điểm 3 trên đường đặc trưng của máy bay).
2.4. Chế độ chuyển động bay xuống đều
- Giả thuyết:
Góc tấn máy bay trùng góc tấn cánh. (mb=profil).
Tâm đẩy trùng trọng tâm.
Máy bay chuyển động đều và đối xứng trong mặt phẳng Oxz.
Góc tấn máy bay nhỏ không đáng kể so với góc nghiêng máy bay( < ).
R Fz
Fx X
G Psin A= Tu Vp Pcos Vz Vx
x
P Z Hình.2.9 : Chế độ bay xuống đều
- Ta có phương trình lực:
[2.19]
fPT
PT
PTtg
PVVTVT
PVWW
VVtg
unu
P
PnPu
P
nu
P
Z
1
..
0. amRTP u
P
Z
P
Z
X
Z
VV
VV
VVtg
cos

24
- Phân tích lực. Chiếu lên các trục ta có:
+ Chiếu lên x1: [2.20]
+ Chiếu lên z1: [2.21]
- Các đặc tính:
Khi hạ cánh, ngoài thành phần Psin, lực kéo Tu cũng tác động vào để thắng lực cản; trong trường hợp Tu = 0 Ta có thể coi máy bay hoạt động ở chế độ tàu lượn. Vz được gọi là vận tốc vario hay vận tốc theo phương thẳng đứng VZ.
Vì góc nhỏ nên có thể coi cos 1; sin 0.
Suy ra: Fz = P
Tu = Fx.
Từ phương trình trên ta có:
[2.22]
- Độ dốc hạ cánh: ()
[2.23]
- Trong trường hợp tàu lượn (Tu = 0):
+Về mặt lực Fx = P.sin
Fz = P.cos
+Về vận tốc Tu = 0 => Wu = 0
Vz = Wn / P [2.24]
-Nhận xét:
+ Khi W= Wu- Wn nhỏ nhất thì vận tốc vario cũng đạt giá trị nhỏ nhất.
0sin PFT xu
0cos PFz
PWWV
VPVFVT
unZ
PPxPu
0.sin...
PT
fPT
PTtg
PVVTVT
PVWW
VVtg
uun
P
PuPn
P
un
P
Z
1
..

25
+ Góc nghiêng hạ cánh đạt giá trị nhỏ nhất ứng với góc tấn 2 ở đó có hệ số chất lượng bay lớn nhất.
+ Thời gian hạ cánh lâu nhất nhất khi Vz min.
+ Nếu công suất động cơ (Wn) tăng =>Vz giảm => góc chúc ngóc giảm.
2.5. Chế độ cất cánh
Cất và hạ cánh là các chế độ bay rất phức tạp và đặc biệt nguy hiểm trong quá trình bay của máy bay. Mỗi chế độ này đều đòi hỏi những thông số riêng nhằm đảm bảo cho quá trình cất và hạ cánh của máy bay diễn ra một cách an toàn. Phần lý thuyết dưới đây đề cập đến việc xác định các thông số thời gian, chiều dài cần thiết cho quá trình cất và hạ cánh có kể đến ảnh hưởng của một số yếu tố bên ngoài như gió ....
Trong suốt quá trình cất cánh, ngoài khối lượng không tải và hàng hoá, hành khách là cố định, máy bay sẽ chịu tải trọng của lượng nhiên liệu cần thiết cho chuyến bay. Khi đó, động cơ sẽ phải làm việc ở hiệu suất cao để máy bay có thể cất cánh trong khoảng thời gian ngắn nhất. Đối với máy bay dân dụng thì còn có nhiều điều kiện phức tạp hơn nữa bởi yêu cầu giảm tiếng ồn đến mức tối thiểu.
- Quá trình cất cánh được chia thành 4 giai đoạn:
+ Giai đoạn 1: chạy đà trên mặt đất.
Trong giai đoạn này, máy bay tăng tốc đến “vận tốc ngóc”, Vr
Độ cao của máy bay vẫn không đổi cho nên CL,CD cũng không đổi.
+ Giai đoạn 2: chuẩn bị chúc ngóc.
Giai đoạn này xảy ra rất nhanh, máy bay bắt đầu quá trình bay lên ( tức là xoay quanh trục y ) do tín hiệu điều khiển từ phi công, do đó đến cuối giai đoạn này lực nâng lớn hơn trọng lực và máy bay bắt đầu rời đường băng.
+ Giai đoạn 3: chúc ngóc hoàn toàn.
Trong giai đoạn này, đường bay thay đổi để phù hợp với góc chế độ lên dần cuối cùng. Trọng tâm của máy bay di chuyển theo quỹ đạo gần như tròn.
+ Giai đoạn 4: bay lên dần.
Trong chế độ này, máy bay sẽ lên dần đều với một góc leo và vận tốc leo không đổi đạt dần đến độ cao cất cánh h ( khoảng 15 m ). Lực đẩy, CL, CD cũng coi như không đổi.

26
Hình 2.10: Các chế độ cất cánh
-Trong thực tế, giai đoạn 3 và 4 xảy ra tức thời, người ta gộp hai chế độ 1 và 2 với nhau, chế độ 3 và 4 với nhau.
- Sau đây ta sẽ tính toán các thông số liên quan đến quá trình cất cánh: vận
tốc cất cánh, chiều dài cất cánh .
Fr
Fx Fms Tu P Hình 2.11: Lực tác động ở chế độ cất cánh
+ Từ định luật 2 Newton ta có phương trình: (2.25)
Trong đó: a: gia tốc của máy bay ( )
Tu: lực đẩy của động cơ.
Fx: lực cản khí động
Fms: lực ma sát lăn giữa bánh xe và đường băng.
MFFTa msxu
2/sm

27
M: trọng lượng của máy bay.
+ Ta coi gia tốc a là không đổi. Vận tốc cất cánh (Vdec) được tính như sau:
Do máy bay ở trên mặt đất, coi z = 0 nên
[N] (2.26)
Suy ra :
[m/s] (2.27)
Thời gian cất cánh sẽ được tính:
[sec] (2.28)
Chiều dài cất cánh ( DR) đến khi máy bay ngóc lên:
[m] (2.29)
- Ta thấy rằng, chiều dài cất cánh tỉ lệ với trọng lượng. Ngoài ra, chiều dài cất cánh còn ít nhiều chịu ảnh hưởng bởi tỉ trọng không khí ( thông số này ảnh hưởng tới lực đẩy), nhiệt độ môi trường .... Nhiệt độ không khí nếu cao sẽ làm giảm lực đẩy. Trong thực tế, các nhà chế tạo phải cung cấp các đồ thị biểu diễn sự ảnh hưởng của các yếu tố như: nhiệt độ, độ ẩm, tỉ trọng không khí ... cho người sử dụng.
- Trong trường hợp đường băng không hoàn toàn nằm ngang như đường chân trời, vec tơ trọng lượng của máy bay sẽ không vuông góc với đương băng. Học viên hãy tự thành lập các công thức để tính gia tốc a, vận tốc cất cánh cũng như quãng đường cất cánh cho 2 trường hợp : đường băng có độ dốc dương và đường băng có độ dốc âm.
- Trong trường hợp có gió cùng chiều hoặc ngược chiều, vận tốc cất cánh và quãng đường cất cánh cũng sẽ thay đổi. Học viên hãy tính cho các trường hợp trên.
20 ...
21
decZR VCSPF
ZOdec SC
PV
2
aVt dec
aVatD dec
R 22
22

28
2.6. Chế độ hạ cánh Ta cũng chia chế độ hạ cánh thành bốn giai đoạn như cất cánh, trên hình 2.14,
hoặc trong trường hợp đơn giản hoá có thể coi gồm hai giai đoạn chính.
Hình 2.12: Các giai đoạn trong chế độ hạ cánh
Chiều dài hạ cánh ở đây phụ thuộc rất nhiều vào kỹ thuật điều khiển. Khi máy bay gần tiếp đất, người phi công thường điều khiển máy bay ngóc đầu lên để tăng lực cản, giảm vận tốc và tiếp đất bằng hệ thống càng sau rồi sau đó mới cải bằng máy bay về vị trí nằm ngang. Những phi công ít kinh nghiệm thường có xu hướng kết thúc chế độ kéo ngóc khi máy bay vẫn chưa chạm đất và máy bay gần như “trôi” trên mặt đất, giảm ga cho đến khi máy bay chạy thất tốc trên đường băng. Còn người phi công kinh nghiệm thì thường tiếp đất ngay khi hết chế độ kéo ngóc với vận tốc máy bay lớn hơn vận tốc thất tốc và đây chính là chiều dài yêu cầu. Quá trình “cải bằng máy bay” diễn ra rất nhanh sau khi tiếp đất.
Ở đây có nhiều hệ số có thể dự tính chiều dài đường hạ cánh trên mặt đất phức tạp hơn chế độ cất cánh. Động năng máy bay giảm đi khi càng bắt đầu chạm đất và hệ thống phanh hoạt động, do vậy, hệ số ma sát lúc này sẽ bằng tổng hợp các hệ số ma sát lăn, phanh và ảnh hưởng lớn bởi vận tốc và liệu đường băng khô hay ướt, ta xem đồ thị 2.14.
Các giá trị này chỉ có thể đạt được nếu tất cả các bánh xe có phanh với các hệ thống chống trượt bánh hoàn hảo. Việc giảm tốc lớn nhất phụ thuộc vào sự thoải mái của hành khách trên máy bay hoặc các lý do khác, và có thể có giới hạn phanh. Hệ thống phanh chỉ có thể hoạt động sau khi tiếp đất cho nên sẽ có một khoảng trễ khoảng 2s trước khi nó hoạt động tốt. Tương tự là hệ thống thổi ngược của động cơ hay hệ thống giảm lực nâng (dạng như tấm cản lưng). Ma sát từ hệ thống phanh là hệ số quan trọng hơn nhiều hệ số ma sát lăn ở chế độ cất cánh.

29
Hình 2.13: Sự biên thiên của lực ma sát giữa bánh xe và đường băng
2.6. Chế độ bay liệng ( Virage )
2.6.1. Hệ số tải trọng
Hệ số tải trọng (kí hiệu là n) là tỉ số giữa khối lượng gia tăng trong quá trình bay và khối lượng thực hay tỉ số giữa lực nâng và trọng lực máy bay.
(2.30)
2.6.2. Chế độ bay liệng chuẩn ( Virage ).
Hình 2.14: Chế độ liệng của máy bay
Trong đó: Fc lực li tâm.
R: bán kính liệng.
P: trọng lượng máy bay.
- Như vậy, hệ số tải trọng sẽ được tính:
PF
PP
n Za
cos1
PP
n a

30
gtgVR
RgV
gRtg
2
22
(2.31)
- Bán kính liệng R:
(2.32)
Gọi ự là hệ số liệng.
hệ số liệng 1 =>khi vận tốc góc liệng là 180/min ( 3O/s )
hệ số liệng 2 => khi vận tốc góc liệng là 1 vòng/min. ( 6O/s )
2.7. Đồ thị tọa độ cực và các điểm bay đặc biệt
2.7.1. Đường lực nâng và đường đặc tính cực (Polaire) của máy bay
222
2
.
tggMPtg
MFR
RMPFtg
c
c

31
Hình 2.15: Đường hệ số lực nâng Hình 2.16: Đường đặc tính cực (Polaire)
- Các điểm bay đặc biệt:
+ Điểm Cz đạt giá trị lớn nhất: 4
+ Điểm Cz =0: 0.
+ Điểm hệ số chất lượng bay f đạt giá trị max: 2.
2.7.2. Đường đặc tính “Máy bay” : Tn = f (Vp) và Wn = f (Vp)
Ta có: Wn =Tn *Vp.
(2.33)
Wn min khi =3
z
xn
n CC
PfPT
TPf
...2.
0 zz
xpnn CS
PCCPVTW

32
Hình 2.17: Các đường đặc tính Tn = f (Vp) và Wn = f (Vp).
2.7.3. Đường đặc tính động cơ
Máy bay có thể được trang bị động cơ một trong những nhóm sau :
+ Nhóm động cơ Piston - cánh quạt (GMP)
Công suất đo tại trục động cơ : Wm = Cm.Ω
Công suất hiệu dụng : Wu = Wm.H
Cm : Mo men tại trục
H : hiệu suất cánh quạt
Hình 2.18 : Đường công suất động cơ Piston-cánh quạt (GMP)
Hệ số tiêu thụ nhiên liệu : Csp là lương tiêu thu nhiên liệu trong 1 giờ và cho 1 đơn vị công suất.
CSP = Ch/Wm
CSP có giá trị khoảng0,20,3 kg/ngựa.h
Đơn vị : CSP = kg/ngựa.h
Ch = kg/h
Wm = sức ngựa ( 1 ngựa = 736 W)
Ch : hệ số tiêu thụ nhiên liệu cho 1 giờ bay

33
+ Nhóm động cơ Turbo - phản lực (GTR)
Lưc đẩy hiệu dụng Tu, khi coi trọng lượng nhiên liệu Qc nhỏ hơn nhiều so với trọng lượng không khí đi qua động cơ trong 1 đơn vị thời gian Qa ta có :
Tu = Qa*(V2 – V1)
Trong đó : V2 là vận tốc ra khỏi ống phụt của động cơ
V1 là vận tốc vào động cơ
Khi số vòng của động cơ không đổi, ( hay số EPR - tỷ số nén không đổi)
lực đẩy của động cơ hầu như không phụ thuộc vào vân tốc bay Vp. Tuy nhiên khi thay đổi độ cao do áp suất thay đổi dẫn tới lượng khí vào động cơ thay đổi do vậy lực đẩy của động cơ cũng đổi :
TuZ = TuO* K
Trong cơ học vật bay, ta coi hệ số k = 1 có nghĩa là lực đẩy giảm tuyến tính theo trọng lương riêng của không khí.
Hình 2.19 : Đường công suất động cơ Turbo - Phản lực (GTR)
Hệ số tiêu thụ nhiên liệu: Csp là lương tiêu thu nhiên liệu trong 1 giờ và cho 1 đơn vị lực đẩy.
CSP = Ch/Tu
CSP có giá trị khoảng0,0040,11 kg/ngựa.h
Đơn vị : CSP = kg/N.h
Ch = kg/h

34
Tu = N
Ch : hệ số tiêu thụ nhiên liệu cho 1 giờ bay
( Với mỗi loại động cơ ta có một vòng quay tối ưu, ở đó giá trị Csp là nhỏ nhất.
- Đường cong Wu = f(Vp)
Công suất hiệu dụng của đông cơ : Wu= Tu. Vp. Vậy đường cong co dạng Y = a.X là một đường thẳng đi qua gốc toạ độ
+ Nhóm động cơ Turbo - cánh quạt (GTP)
Công suất toàn phần WΩ của nhóm động cơ này gồm :
- Do cánh quạt : Wucq = Wm.H
- Do lực phản lực của động cơ : WuĐC= TuĐC. Vp.
Từ đó công suất toàn phần WuT : WuT = Wucq + WuĐC
WuT = (Wm.H) + (TuĐC. Vp)
- Đường cong Wu = f(Vp)
Hình 2.20 : Đường công suất động cơ Turbo - cánh quạt (GTP)
Hệ số tiêu thụ nhiên liệu : Csp là lương tiêu thu nhiên liệu trong 1 giờ và cho 1 đơn vị công suất.
CSP = Ch/Wm
Đơn vị : CSP = kg/ngựa.h
Ch = kg/h
Wm = sức ngựa ( 1 ngựa = 736 W)

35
Ch : hệ số tiêu thụ nhiên liệu cho 1 giờ bay
2.7.4. Đường đặc tính tổng hợp động cơ_ máy bay
Đó là đồ thị biểu diễn đường cong động cơ và đường cong máy bay
+ Đối với động cơ Moto cánh quạt (GMP)
Hình 2.21: Đường đặc tính tổng hợp động cơ Piston-cánh quạt
Wn: Công suất yêu cầu của máy bay cho chế độ bay.
Wu: Công suất hữu ích do động cơ gây sinh ra.
Khi Wn = Wu ( tại 01 và 02 ) máy bay bay đều.
Tại điểm 3 ( điểm trần bay) Wn đạt giá trị min.
Điểm trần bay cũng là điểm ngăn cách 2 chế độ.
- Chế độ 1(ổn định): Vp tăng -> Wn tăng, ( kí hiệu trên hình là vùng (2))
- Chế độ 2: Vp tăng -> Wn giảm-> Lực cản tăng, ( kí hiệu trên hình là vùng (1))
Tại điểm 4: vận tốc Vp min (2.34)
- Thời gian tự hành lớn nhất ( autonomie maxi) : là thời gian bay lâu nhất của máy bay.
maxmin ..
2
Zz CSPV

36
Thông số này phụ thuộc vào nhiều yếu tố.
1. Lượng nhiên liệu ( Q ) và lượng tiêu thụ dầu trên đơn vị thời gian (Ch).
(2.35)
Khi máy bay bay đều Wn = Wu
Như vậy max -> Ch min -> Wn min -> =3
2. Ảnh hưởng của độ cao.
(2.36)
-> Càng thấp máy bay bay càng lâu.
- Bán kính tự hành lớn nhất.( Rayon maxi): là khoảng cách máy bay có thể bay xa nhất mà không cần tiếp nhiên liệu.
(2.37)
Trong đó: Cd là lượng tiêu thụ dầu trên 1 đơn vị chiều dài.
Giả thiết máy bay bay đều trong điều kiện không có ảnh hưởng của gió.
(2.38)
Như vậy: D max -> Cd min -> f max -> =2
+ Đối với động cơ Turbo phản lực (GTR)
hCQ
u
h
m
hs W
CWCC
pnn VTkW .
dCQD
fPCTC
VWC
VCC s
ns
p
ns
p
hd ...

37
Hình 2.22: Đường đặc tính tổng hợp động cơ Piston-cánh quạt
Tại 2 điểm 01 và 02 Tn = Tu nên máy bay bay đều.
Điểm 2 là điểm ngăn cách 2 chế độ. (1) và (2)
- Vận tốc nhỏ nhất Vp min cũng giống như trường hợp của GMP
- Thời gian tự hành lớn nhất = Q/Ch
(2.39)
Như vậy max -> Ch min -> f max -> =2
Độ cao gần như không ảnh hưởng tới đường đặc tính của máy bay. Tuy nhiên, khi máy bay thay đổi độ cao hay số vòng quay động cơ thay đổi thì Cs sẽ thay đổi. Thông thường khi tăng độ cao, Cs giảm đến giá trị Nopt rồi lại tăng.
- Bán kính tự hành lớn nhất:
(2.40)
PfC
TC
TCC h
n
h
u
hs
.
s
p
n
p
h
p
d CPfVQ
TVQ
CVQ
CQD
.....

38
Csmin Cs
Hình 2.23: Sự thay đổi của Cs theo độ cao
Như vậy: D max -> Cd min -> Tn/Vp min
Tầm bay càng lớn khi máy bay bay càng cao.
+ Đối với động cơ Turbo - Cánh quạt (GTP)
Đường cong động cơ cắt đường cong máy bay tại hai điểm O1 và O2.
Tại hai điểm O1 và O2, giá trị Wu = Wn, máy bay bay ngang đều.
Góc tới có giá trị α+ nằm giữa α3 và α2 sẽ chia vùng bay ra làm 2 chế độ. Đường đặc tính tổng hợp cho trường hợp động cơ thuộc nhóm Turbo - cánh quạt :
Hình 2.24: Đường đặc tính tổng hợp động cơ Turbo-cánh quạt
Thí dụ máy bay trang bị động cơ Piston - cánh quạt ở chế độ bay lên đều có thể sử dụng các đồ thị trên để xác định các đặc trưng của chuyển động ( tính Vz... )

39
Hình 2.25 : Vận tốc lên thẳng đứng Vz
2.8. Chế độ bay cận âm và trên âm.
Giá trị lớn nhất của hệ số Cz là hàm của số Mach( M ).
Cz max = f( M )

40
Hình 2.26: Đường cong Cz max bay cận âm và trên âm
(2.41)
Mặt khác
(2.42)
(2.43)
Hình 2.26: Miền bay cho chế độ cận âm và trên âm
2...21
PZZ VCSP
z
sP p
pmRTmamV ....
2...7.0 mCSpP zs
2.MCz2.MCz

41
Hình 2.27 : Miền hoạt động của máy bay

42
CHƯƠNG 3 ỔN ĐỊNH VÀ ĐIỀU KHIỂN MÁY BAY
3.1.Các hệ trục toạ độ
1. Hệ toạ độ cố định Oxyz gắn cố định với mặt đất. Gốc là điểm xuất phát
của vật bay, trục z hướng thẳng đứng xuống dưới. Ox thường là một hướng
đặc trưng (ví dụ hướng Đông). Trục Oy thẳng góc với mặt phẳng Oxz, hệ
trục Oxyz tạo thành một tam diện thuận
2. Hệ trục chuyển động tịnh tiến cùng máy bay Cxfyfzf , có gốc ở khối
tâm C của máy bay và các trục Cxf , Cyf , Czf có phương không đổi và
tương ứng song song với các trục cố định Ox ,Oy , Oz, Mặt phẳng Cxfyf là
mặt phẳng nằm ngang
3. Hệ trục gắn cố định với máy bay Cxbybzb có gốc C là khối tâm máy bay.
Trục Cxb thường là trục dọc của máy bay , hướng về phía mũi. Trục Czb nằm
trong mặt phẳng đối xứng của máy bay, trục Czb hướng xuống dưới trong
trường hợp máy bay bay ngang. Trục Cyb hướng thẳng góc với mặt phẳng
Cxbzb và tạo thành một tam diện thuận
4.Hệ tọa độ không tốc Cxayaza có gốc ở khối tâm C, trục Cxa trùng với
không tốc V ( không tốc là vận tốc tương đối của khối tâm máy bay so với
môi trường không khí chưa bị nhiễu động bởi chuyển động máy bay) V=V∞ ,
khác với vận tốc Vk là vận tốc tuyệt đối của khối tâm máy bay Vk=VC ,
trường hợp không khí đứng yên V=Vk . Mặt phẳng Cxaya vuông góc với mặt
phẳng đối xứng của máy bay Cxbyb . Trục Cza vuông góc với mặt phẳng
Cxaya và tạo với các trục Cxa , Cya một hệ trục thuận.
5.Hệ tọa độ địa tốc hay hệ toạ độ quỹ đạo Cxkykzk có gốc ở khối tâm C,
trục Cxk trùng với Vk . Mặt phẳng Cxkyk vuông góc với mặt phẳng ngang
Cxfyf , trục Cyk vuông góc với Cxkzk và tạo thành một hệ toạ độ thuận. Như

43
vậy hệ toạ độ quỹ đạo chỉ phụ thuộc vào chuyển động khối tâm C mà không
bị nghiêng ngả theo chuyển động máy bay, trục yk luôn nằm trong mặt
phẳng ngang
Chuyển động của máy bay có thể phân tích thành hai chuyển động cơ bản :
-Chuyển động theo là chuyển động tịnh tiến của hệ trục Cxfyfzf so với hệ
trục cố định Oxyz
-Chuyển động tương đối là chuyển động quay quanh khối tâm C
Để xác định hướng của máy bay trong không gian ta cần xác định hướng của
hệ trục gắn liền với máy bay Cxbybzb so với hệ trục tịnh tiến Cxfyfzf
Vị trí hệ trục Cxbybzb xác định hướng của máy bay có thể biểu diễn bởi ba
phép quay liên tiếp nhau, những góc quay này được gọi là góc quay Euler
Ở thời điểm ban đầu ta giải thiết hệ trục Cxbybzb trùng với hệ Cxfyfzf . Từ hệ
trục Cxfyfzf ta thực hiện ba phép quay sau đây
a. Quay hệ trục Cxfyfzf quanh trục Czf một góc hướng ψ đến hệ trục Cx1y1z1
b.Quay hệ trục Cx1y1z1 quanh trục Cy1 một góc chúc ngóc θ để đến trục
Cx2y2z2
c.Quay hệ trục Cx2y2z2 quanh Cx2 một góc nghiêng hoặc góc xoắn Φ để đến
hệ trục Cx3y3z3 , hệ trục này chính là hệ trục Cxbybzb . Các góc quay ψ, θ, Φ
này là góc quay Euler
Các góc quay Euler được định nghĩa như sau

44
Góc hướng ψ là góc giữa trục Cxf và hình chiếu của Cxb lên mặt phẳng
ngang
Góc chúc ngóc θ là góc giữa trục Cxb và mặt phẳng nằm ngang
Góc nghiêng Φ là góc làm giữa mặt phẳng đối xứng của máy bay Cxbzb với
mặt phẳng thẳng đứng chứa xb
Ngoài ra ta còn dùng các góc sau
Góc tấn α là góc giữa trục máy bay Cxb với hình chiếu của véctơ không tốc
V xuống mặt đối xứng của máy bay Cxbyb

45
α >0 nếu hình chiếu của V hướng xuống dưới so với Cxb
Góc cạnh β là góc giữa véctơ không tốc V với mặt phẳng đối xứng của máy
bay Cxbzb
β >0 nếu V nghiêng về phía dương của trục yb
Góc nghiêng quỹ đạo θk là góc giữa véctơ địa tốc Vk với mặt phẳng nằm
ngang Cxfyf
Góc nghiêng quỹ đạo φa là góc giữa mặt phẳng Cxaza với mặt phẳng thẳng
đứng chứa xa , trong trường hợp không có gió φa là góc xoay của hệ Cxayaza
đối với Cxkykzk quanh trục xk =xa
3.2. Ổn định tĩnh trong chuyển động dọc của máy bay
1. Mômen khí động tác dụng lên cánh trong chuyển động dọc trục
Chuyển động dọc xảy ra khi máy bay chỉ chuyển động trong mặt phẳng
thẳng đứng
c : Đường dây cung

46
xac: Khoảng cách từ cạnh trước của cánh đến tâm khí động của cánh
xcg: Trọng tâm của máy bay
zcg: Độ cao của trọng tâm máy bay so với tâm khí động
iw: Góc giữa đường dây cung của cánh và FRL
αw: Góc tấn của cánh
αFRL: Góc tấn của thân
Lw: Lực nâng của cánh
Dw: Lực cản của cánh
Macw:Mômen đối với tâm khí động của cánh
Tổng momen đối với trọng tâm của các lực khí động tác dụng lên cánh :
acwcgwwwcgwww
accgwwwaccgwwwcgw
MziDziLxxiDxxiLM
cossinsincos
(3.1)
Chia cho cSV 2
21
ta có:
Macwwwcg
Dwwwcg
Lw
wwaccg
Dwwwaccg
Lwmcgw
Cic
zCi
cz
C
ic
xc
xCi
cx
cx
CC
cossin
sincos (3.2)
Với góc tấn bé ta có:
1cos ww i
ww isin = ww i
Giả thiết bỏ qua thành phần lực cản và các thành phần ngang của lực nâng
thì phương trình trên trở thành
Macwaccg
Lwmcgw Cc
xcx
CC
(3.3)
Giả thiết quan hệ giữa hệ số lực nâng của cánh và góc tấn cánh là tuyến tính
ta có:

47
wwLLowLw CCC (3.4)
Từ các phương trình trên ta có
Macwaccg
wwLLowmcgw Cc
xc
xCCC
)( (3.5)
2. Mômen khí động tác dụng lên đuôi ngang của máy bay trong chuyển
động dọc
Xét trường hợp đuôi máy bay ở sau cánh , do đó đuôi sẽ chịu ảnh hưởng bởi
dòng khí gây ra do cánh
Giá trị vận tốc của dòng chuyển động lên hoặc xuống phụ thuộc vào vị trí
tương đối của mặt đuôi so với cánh
Trong đó góc hợp giữa đuôi và đường thân máy bay là it . Do đó có dòng
không khí đi xuống nên không tốc ở đuôi 'V sẽ khác với V và hợp với V
một góc ε
Góc tấn αt là:
twwtFRLt iii (3.6)
Mômen của lực khí động tác dụng lên đuôi đối với trọng tâm :

48
actFRLtFRLtcgt
FRLtFRLttt
MLDzDLlM
sincos]sincos[
(3.7)
Bỏ qua các đại lượng bé trong phương trình trên ta có:
ttt LlM (3.8)
Hệ số lực nâng của đuôi được ký hiệu là tt
tL
SV
LCt
2
21
với St là diện tích bề
mặt của cánh đuôi
Vậy ta có :
(3.9)
tt L
w
ttt
tt
tM C
V
V
cSSl
cSV
MC2
2
2
2121
21
(3.10)
Hay tt LHM CVC (3.11)
Trong đó w
t
w
t
V
V
2
2
2121
(3.12)
cSSlV tt
H (3.13)
là tỷ số áp lực động ở đuôi và cánh còn được gọi là hệ số hiệu quả đuôi
VH là tỷ số thể tích của đuôi ngang
Từ phương trình (3.6) hệ số lực nâng của đuôi có thể viết dưới dạng:
)( twwLtLL iiCCCttt
(3.14)
Giả thiết mặt cắt của đuôi là đối xứng và tLC là độ dốc của đường nâng a
cuả đuôi ngang
ttLtt SVClMt
2
21

49
Góc tấn phụ ε do dòng không khí chuyển động xuống ở đuôi có thể viết dưới
dạng:
wwd
d 0 (3.15)
Trong đó ε0 là góc tấn phụ lúc αw=0 với w là góc tấn của cánh
Với giả thiết lực nâng phân bố elip ta có
w
L
ARC
w
2 (3.16)
wLC , wAR là hệ số nâng và tỷ số dài của cánh
Lấy đạo hàm phương trình này ta được
w
L
w ARC
dd w
2
(3.17)
wwLHtwoLH
ww
towwLHM
ddCViiCV
ddiiCVC
tt
tt
1 (3.18)
Phương trình này có thể viết dưới dạng
wMMoM tttCCC (3.19)
Trong đó
twoLHMo iiCVCtt
(3.20)
(3.21)
wwLHM d
dCVCtt
1

50
3. Momen khí động tác dụng lên thân máy bay trong chuyển động dọc
Phương trình để tính hệ số momen của thân máy bay
wfmmofm CCC (3.22)
Với
dxiwcS
kkC fow
l
fmof
f
0
212
5.36 (3.23)
dxwcS
C ul
ffm
f
0
2
5.361
(độ-1) (3.24)
Trong đó (k2-k1) là hệ số hiệu chỉnh cho tỷ số chiều dày của thân máy bay
S:Diện tích cánh
c : chiều dày dây cung trung bình của cánh
Wf: Chiều rộng trung bình của mặt cắt thân
α0w: Góc có lực nâng bằng không của cánh
if: Góc của đường trung bình của thân so với đường tham chiếu của thân,
góc này được tính âm nếu thân chúc xuống
Hệ số 12 kk dược tính dựa trên hình vẽ và kết quả thức nghiệm
Góc tấn tại một mặt cắt cuả thân bao gồm góc tấn hình học của mỗi mặt cắt
và góc tấn phụ εu do chuyển động lên hoặc xuống của không khí ở thân do
cánh gây ra
4. Momen do lực đẩy của động cơ
Động cơ cánh quạt có thể có ảnh hưởng quan trọng lên sự ổn định của máy
bay, nếu đường trục của động cơ không đi qua trọng tâm thì động cơ sẽ tạo
ra momen M

51
5. Sự ổn định dọc tĩnh của máy bay
Tổng hệ số momen các lực khí động tác dụng lên máy bay bằng
mfmtmwmcg CCCC (3.25)
Các hệ số momen Cmw,Cmt,Cmf được tính từ trên
Nên ta có
wmmomcg CCC (3.26)
trong đó
twtLHmofmowmo iiCVCCC 0 (3.27)
wtLHfm
accgwLm d
dCVCc
xc
xCC
1 (3.28)
Xét hai máy bay với đường thẳng quan hệ giữa hệ số momen khối tâm và
góc tấn α của cánh
Giả thiết hai máy bay bay ở chế độ bình ổn , tổng lực và momen bằng
không, do đó Cmcg =0.Chế độ bình ổn ứng với điểm B
Giả thiết máy bay bị một cơn gío giật làm tăng góc tấn α đến điểm C.
Khi đó máy bay 1 sẽ có momen âm có khuynh hướng quay máy bay về vị trí
cân bằng ban đầu làm giảm góc tấn

52
Với máy bay 2, momen tác dụng lên máy bay dương và có khuynh hướng
làm tăng góc tấn và máy bay càng lệch xa khỏi vị trí cân bằng ban đầu
Vậy điều kiện để máy bay ổn định tĩnh là
0 d
dCC mm (3.28)
Xét máy bay 3, máy bay 3 thỏa mãn điều kiện này nhưng chỉ có máy bay 1
thoả mãn điều kiện ổn định với hệ số Cmo > 0, do đó đường thẳng Cmcg phải
cắt trục α ở phía dương
Vậy Cmo>0
Ta có
ddCdCdC
ddC
CL
Lmmm (3.29)
Vì d
dCm >0 nên ta suy ra được
0L
m
dCdC (3.30)
Khi bỏ qua ảnh hưởng của đưôi và thân máy bay thì
cx
cx
CC accgwLm (3.31)
Do đó điều kiện ổn định tĩnh của máy bay trong trường hợp này là xcg<xac,
tức là tâm khí động phải nằm sau trọng tâm của máy bay
Vậy
cx
cx
CCCC accgLowmacwmowmo (3.32)

53
6. Điểm trung hoà
Quan sát thấy Cmα phụ thuộc vào vị trí khối tâm của máy bay xcg , vị trí khối
tâm máy bay có thể thay đổi trong khi bay, Do đó ta phải tìm được giới hạn
di chuyển trọng tâm của máy bay để may bay luôn ổn định
Nếu đường Cmcg nằm ngang thì momen không phụ thuộc vào α , khi đó máy
bay sẽ cân bằng với mọi góc α và gọi là cân bằng phiếm định
Để cho máy bay chuyển động ổn định ta cần xác định vị trí khối tâm để cho
máy bay rơi vào tình trạng cân bằng phiếm định (tìm xcg để Cmα=0)
Ta có
dd
CC
VCC
cx
cx
wL
tLH
wL
fmacNP 1 (3.33)
xNP :Là điểm trung hoà trong chuyển động dọc
Nếu vị trí trọng tâm nằm ở điểm trung hoà thì máy bay nằm ở vị trí cân bằng
phiếm định
Nếu trọng tâm nằm sau điểm trung hoà máy bay sẽ không ổn định tĩnh

54
3.3 Sự điều khiển chuyển động dọc của máy bay
1. Các mặt điều khiển
Để thay đổi trạng thái chuyển động của máy bay thì cần phải tác dụng lực
hay mômen lên máy bay.Máy bay có các mặt điều khiển để tạo lực và
mômen sinh ra gia tốc để điều khiển máy bay
Các mặt điều khiển bao gồm: cánh lái , đuôi lái ngang và đuôi lái đứng
Đuôi lái đứng gắn bản lề với đuôi đứng để điều khiển hướng của máy bay
Đuôi lái ngang gắn bản lề với đuôi ngang để điều khiển độ chúc ngóc của
máy bay
Các cánh lái để điều khiển độ nghiêng của máy bay
2. Điều khiển chuyển động dọc băng đuôi lái ngang
Ảnh hưởng của hệ số mômen Cm vào góc xoay δe của đuôi lái ngang, góc
này được tính dương nếu đuôi lái ngang quay xuống
Ta thấy góc nghiêng của đường Cm không đổi
Khi đuôi lái ngang xoay thì lực nâng và momen đều thay đổi
eeLL CC với e
LeL d
dCC (3.34)
eeLLL CCC (3.35)

55
eemm CC với e
mem d
dCC (3.36)
eemmmom CCCC (3.37)
Các đạo hàm CLδe và Cmδe có quan hệ đặc trưng khí động và đặc trưng hình
học của đuôi ngang theo cách sau
Thay đồi lực nâng của máy bay do sự quay của đuôi lái ngang bằng sự thay
đổi lực nâng tác dụng lên đuôi ngang
tLL (3.38)
ee
LttLt
tL d
dCSS
CSS
C
(3.39)
η được tính theo phương trình trên
Đại lượng e
Lt
ddC
là độ hiệu quả của đuôi lái ngang, nó được đánh giá bởi
phương trình
tLe
t
t
Lt
e
Lt Cdd
ddC
ddC
(3.40)
Từ phương trình trên ta có
e
LtteL d
dCSSC
(3.41)
Gia số của momen trúc góc
ee
LtHLtHm d
dCVCVC
(3.42)
hay
tLHe
LtHem CV
ddCVC (3.43)
Ta có thể thay đổi hiệu quả của sự điều khiển của đuôi lái ngang Cmδe bằng
cánh chọn tỷ số thể tích VH và kích thước của đuôi lái ngang, trong đó VH
đựơc tính như sau

56
cSSlV tt
H
3. Góc của đuôi lái ngang lúc bay ổn định
Máy bay được gọi là bay bình ổn nếu các lực và momen tác dụng lên nó là
cân bằng
Để tính góc của đuôi lái ngang δe lúc bay bình ổn, ta cho tổng momen chúc
góc tác dụng lên máy bay bằng không
eemmmom CCCC (3.44)
Vậy
em
trimmmotrim C
CC
(3.45)
Hệ số lực nâng lúc bay ở chế độ bình ổn
trimeLtrimLLtrim CCC (3.46)
Góc tấn lúc bay bình ổn
L
trimeLLtrimtrim C
CC (3.47)
Phương trình xác định góc đuôi lái lúc bay bình ổn
L
LtrimmLmotrim C
CCCC (3.48)
4. Sự ổn định hướng của máy bay
Sự ổn định hướng là sự ổn định tĩnh của máy bay quay trục z. Máy bay có
tính ổn định về hướng nếu nó có khuynh hướng quay về vị trí cân bằng khi
bị một tác động làm máy bay lệch khỏi vị trí cân bằng
Sự phụ thuộc giữa hệ số momen Cn và góc lệnh cạnh β đối với hai loại máy
bay, với N=Mz là momen quay quanh trục z
Góc lệch cạnh β dương có nghĩa là máy bay quay quanh trục z một góc âm
là β. Máy bay 1 sẽ có momen dương quay máy bay về vị trí ổn định ban đầu,

57
máy bay hai có momen âm càng làm cho nó lệch khỏi vị trí cân bằng và
không ổn định
Vậy điều kiện ồn định là 0 d
dCC n
n
Vậy máy bay có ổn định phương luôn có xu hướng quay về hướng gió
Tính hệ số Cn
Thành phần Cnβ do thân và cánh máy bay gây ra
wb
ffsRlnwfn S
lSkkC (độ-1) (3.49)
kn: Hệ số thực nghiệm, là hàm của các đặc trưng hình học của máy bay (kn=
0…0.06)
kRl : Hệ số thực nghiệm, là một hàm của số Reynolds của thân (kRl=1…4.2)
Sfs: Diện tích hình chiếu cạnh của thân
lf: Chiều dài của thân
Nếu máy bay bay với góc β dương thì đuôi đứng sẽ chịu một lực ngang Lv,
lực này là lực nâng trong mặt phẳng xy. Lực ngang này sẽ quay máy bay
quanh trục thẳng đứng đi qua trọng tâm của nó và làm cho máy bay quay về
hướng gió V
Lực của đuôi đứng chiếu lên trục y
vvvvLv SQCY (3.50)
Góc tấn αv của đuôi đứng v (3.51)
Trong đó σ là góc tấn phụ của đuôi đứng do dòng ngang tạo ra từ các dòng
chảy ở cánh và thân, góc σ cũng giống như góc ε đối với đuôi ngang
Momen N của lực khí động tác dụng lên đuôi đứng
vvvLvvvv SQClYlN )( (3.52)
Hệ số Cn do đuôi đứng

58
vLvv
w
vvLv
w
vnv CV
SbQSQCl
SbQN
C)(
(3.53)
Với SbSlV vv
v là tỷ số thể tích của đuôi đứng
w
vv Q
Q là tỷ số của áp lực động ở đuôi và cánh
Ta có
ddCVC vLvvvn 1 (3.54)
Phương trình để xác định
dd
v 1
ww
wc
vv AR
dz
SS
dd 009.04.0
)cos1(06.3724.01
4
(3.55)
Trong đó
S là diện tích cánh, Sv là diện tích đuôi đứng , zw khoảng cánh từ điểm có
toạ độ bằng 1/4 chiều dài dây cung của mặt cắt gốc của cánh đến đường
trung tâm của thân theo phương song song với trục z, d chiêu cao cực đại
của thân, ARw tỷ số dài của cánh, w
c4
độ nghiêng của đường 1/4 dây cung
của cánh
5. Sự điều khiển hướng máy bay
Sự điều khiển hướng máy bay được thực hiện nhờ mặt điều khiển nằm ở
đuôi đứng gọi là đuôi lái đứng
Lúc đuôi lái đứng quay một góc dương 0r sẽ tạo ra lực ngang tác dụng
lên đuôi đứng dương Yv >0 và tạo ra mômen quay N âm
vvYlN (3.56)
Trong đó
vvLvv SQCY (3.57)

59
Hệ số mômen
Lvw
vvv
wn C
SbQSlQ
SbQNC (3.58)
rr
LvLv d
dCC
(3.59)
Phương trình (3.58) có dạng
rr
Lvvvr
r
Lv
w
vvvn d
dCVddC
SbQSlQC
(3.60)
Tính hiệu quả của đuôi lái được đánh giá bởi hệ số
r
Lvvv
r
nn d
dCVddCC
r
(3.61)
vLr
v
v
Lv
r
Lv Cdd
ddC
ddC
(3.62)
Trong đó τ được tính tra theo đồ thị
6. Sự ổn định nghiêng
Lúc máy bay đổi hướng ( có góc lệch cạnh β >0) , giả thiết có nhiễu động
làm máy bay bị nghiêng , nếu momen của lực khí động quanh trục x của
máy bay có xu hướng làm cho máy bay quay về vị trí ban đầu thì máy bay
có sự ổn định nghiêng , ngược lại thì máy bay không có sự ổn định nghiêng
Mômen quay Mx =L là hàm của β. Yêu cầu để có sự ổn định nghiêng là
0 ll C
ddC (3.63)
Mômen quay L tác dụng lên máy bay lúc có góc lệch cạnh β phụ thuộc vào
độ vểch của cánh Г, độ vút nhọn của cánh , vị trí của cánh so với thân máy
bay và đuôi đứng của máy bay

60
Giá trị lC bị ảnh hưởng lớn nhất bởi góc vểnh cánh Г. Góc vểnh cánh là góc
nghiêng của cánh trong mặt phẳng thẳng đứng so với phương nằm ngang ,
nếu cánh vểnh lên thì góc vểnh Г sẽ dương. Nếu máy bay bị nghiêng thì độ
cao các đỉnh cánh khác nhau
Khi máy bay bắt đầu đổi hướng β >0, sẽ có thành phần vận tốc thẳng góc với
máy bay v ( hướng theo trục y)
uv (3.64)
(u là vận tốc dọc của máy bay)
Phân tích vận tốc dọc mép dưới của cánh thành hai thành phần dọc theo
chiều dài cánh và thẳnh góc với cánh vn
uvvn (3.65)
Tại mặt cắt 1: vn hướng xuống
Tại mặt cắt 2 : vn hướng lên
Thành phần vn đã làm thay đổi góc tấn α ở các mặt cắt 1 và 2 của cánh
Sự thay đổi góc tấn tại mặt cắt 1 là
uvn
1 (3.66)
Sự thay đổi góc tấn tại mặt cắt 2 là
uvn
2 (3.67)
Sự thay đổi lực nâng ΔL ở các mặt cắt 1 và 2 tạo ra một mômen quay quay
máy bay về vị trí nằm ngang. Như vậy cánh vểnh lên làm cho máy bay ổn
định nghiêng và hiện tượng này gọi là hiệu ứng cánh vểnh
Đối với cánh nghiêng ra phía sau cũng làm cho độ ổn định tăng thêm
Vị trí thân máy bay so với cánh cũng ảnh hưởng đến ổn định nghiêng, có hai
vị trí là cánh nằm trên và cánh nằm dưới thân

61
Dòng chảy ngang sẽ chảy vòng ở xung quanh thân máy bay và làm thay đổi
góc tấn địa phương của cánh ở vùng tiếp giáp giữa cánh và thân. Như vậy
cánh trên sẽ làm tăng ổn định nghiêng và cánh dưới làm giảm ổn định
nghiêng
Đuôi ngang cũng có hiệu ứng đuôi vểnh như cánh nhưng có ảnh hưởng
không lớn vì diện tích nhỏ
Đối với đuôi đứng lực ngang Yv sẽ tạo ra mômen N quanh trục đứng z, và
mômen L quanh trụ x . Mômen xoay L xuất hiện vì tâm của lực khí động tác
dụng lên đuôi đứng nằm cao hơn trọng tâm của máy bay. Mômen này có
khuynh hướng quay máy bay về vị trí nằm ngang
7. Sự điều khiển độ nghiêng
Sự điều khiển độ nghiêng được thực hiện bằng cánh liệng, khi điều khiển độ
nghiêng của hai cánh này quay ngược chiều nhau
Sự thay đổi mômen xoay ΔL do sự thay đổi góc cánh lái δa
yZL .
Dưới dạng hệ số
QSbQcydyC
QSbLC l
t
(3.68)
Hệ số nâng Cl ở vùng cánh lái có thể viết dưới dạng
alaa
ll CddCC
(3.69)
Thay phương trình này vào (3.69) và tích phân ta được
2
1
2 y
y
all cydy
SbC
C w
(3.70)

62
Trong phương trình này là các hệ số đã được hiệu chỉnh cho lý thuyến 3
chiều của cánh có chiều dài hữu hạn và 2 số tính cho cả hai cánh lái quay
ngược chiều nhau
2
1
2 y
y
ll cydy
SbC
C w
a
(3.71)
3.4. Các phương trình chuyển động cơ bản
1. Các phương trình cơ bản
Xem máy bay là một vật rắn tuyệt đối thì phương trình chuyển động của
máy bay bao gồm phương trình chuyển động khối tâm C và phương trình
biến thiên momen động
dtdVmF c
e (3.72)
dtdHM e (3.73)
Trong đó eF là tổng véctơ ngoại lực tác dụng lên máy bay
eM là tổng véctơ momen ngoại lực đối với C
Vc : là vận tốc khối tâm C
m : là khối lượng máy bay
H : là véctơ momen động của máy bay đối với C
Hệ trục Cxfyfzf là hệ trục chuyển động tịnh tiến ( Hệ trục quán tính I)
Hệ trục Cxbybzb là hệ trục gắn liền với máy bay B
Nếu gọi A là một vectơ bất kỳ trong không gian thì ta có quan hệ giữa đạo
hàm của A trong hệ trục quán tính I và trong hệ trục gắn với máy bay B
ABI
dtdA
dtdA
(3.74)

63
ω là vectơ vận tốc góc của hệ trục B và cũng là vectơ vận tốc góc của máy
bay
Từ trên ta có
cB
ce Vm
dtdV
mF (3.75)
Hdt
dHMB
e (3.76)
Các thành phần của véctơ Vc và véctơ ω trên các trục Cxb, Cyb, Czb tương
ứng là u,v,w và p, q, r.
Phương trình viết dưới dạng hình chiếu lên các trục Cxb, Cyb, Czb có dạng
rvqwumX e
pwruvmYe
(3.77)
yzxex rHqHHML
zxyey rHpHHMM (3.78)
xyzez qHpHHMN
Trong đó Hx, Hy, Hz là các thành phần của véctơ mômen động của máy bay
trên các trục động Cxb, Cyb, Czb , được tính như sau:
xzxyxx rIqIpIH
yzyxyy rIqIpIH (3.79)
zyzxzz rIqIpIH
qupvwmZe

64
Trong đó Ix, Iy , Iz là mômen quán tính khối lượng của máy bay đối với các
trục Cxb, Cyb, Czb
Ixy , Ixz , Iyz là các tích quán tính khối lượng
Vì mặt phẳng Cxbyb là đối xứng nên ta có: Ixy = Iyz=0
Ta có hệ phương trình vi phân chuyển động của máy bay
rvqwumX e
pwruvmYe (3.80)
qupvwmZ e
pqIIIqrrIpIL xzyzxzx
22 rpIIIrpqIM xzzxy (3.81)
qrIIIpqrIpIN xyyxzxz
2. Phương pháp tuyến tính hoá để giải các phương trình động lực học
bay
2.1. Tuyến tính hóa các phương trình chuyển động
Ẩn số của bài toán là các thành phần vận tốc dài, vận tốc góc trong hệ trục
gắn liền với máy bay Cxbybzb là u, v, w và p, q, r
Có dạng:
uuu 0
vvv 0
www 0 (3.82)
ppp 0

65
qqq 0
rrr 0
Các thành phần của lực và momen tác dụng lên máy bay trong hệ trục
Cxbybzb
XXX 0
YYY 0
ZZZ 0 (3.83)
LLLM xb 0
MMMM Yb 0
NNNM Zb 0
Các đại lượng điều khiển
0
Các góc Euler
0
0
0
Giả thiết lực của động cơ là không đổi, điều kiện bay đối xứng
00000000 rqpvw
Trong hệ toạ độ quỹ đạo ta có:
Vk=wk=0
Xét hệ phương trình chuyển động theo phương xb
rvqwumX e
pwruvmYe
qupvwmZ e
pqIIIqrrIpIL xzyzxzx

66
22 rpIIIrpqIM xzzxy
qrIIIpqrIpIN xyyxzxz
Theo phương trình X ta có
rvqwummgX sin (3.84)
Biến đổi phương trình ta được
vvrrwwqquudtdm
mgXX
00000
00 )sin(
(3.85)
Theo giả thiết ban đầu ta có
ummgXX )sin( 00 (3.86)
Cho các số gia ΔX, Δθ, Δu =0, ta được phương trình chuyển động bình ổn
0)sin( 00 mgX (3.87)
Biểu diễn dưới dạng khác
Ta có khai triển
00000 cossinsincoscossinsin
Nên có
ummgXX )cossin( 000 (3.88)
Với giả thiết ta có
ummgX 0cos (3.89)
ΔX là sự thay đổi của thành phần lực khí động và lực đẩy của động cơ theo
phương xb
Giả thiết ΔX là hàm của u, w, δe, δT , suy ra ΔX trong gần đúng bậc nhất có
dạng
TT
ee
XXwwXu
uXX
(3.90)

67
Trong đó δe, δT là sự thay đổi góc đuôi lái ngang và lực đẩy động cơ
Ta có phương trình
TT
ee
XXmgwwXu
uX
dtdm
0cos (3.91)
TTeewu XXgwXuXdtd
0cos (3.92)
Trong đó wX
mX
uX
mX wu
1,1 là các đạo hàm khí động
Từ đó ta có các phương trình chuyển động dọc gồm: u, w, θ, δe, δT
TTeewu XXgwXuXdtd
0cos
TTeeqwwu ZZgdtdZuwZ
dtdZuZ
00 sin1
TTeeqwwu MMdtdM
dtdwM
dtdMuM
2
2
(3.93)
Các phương trình chuyển động ngang gồm v, p, r, δa , δr trong đó δa là tham
số điều khiển chuyển động nghiêng thực hiện ở cả hai cánh lái quay ngược
chiều quay nhau và δr là góc xoay của đuôi lái đứng
rerpv YgrYupYvYdtd
00 cos
rraerx
xzpv LLrL
dtd
II
pLdtdvL
(3.94)
rraepz
xzrv NNpN
dtd
II
rNdtdvN

68
3. Tính toán hệ số đạo hàm khí động
Để giải được 6 phương trình trên ta cần tính các hệ số đạo hàm khí động
Các đạo hàm này gọi là các đạo hàm ổn định, thay đổi theo số Mach
3.1. Đạo hàm do sự thay đổi của vận tốc dọc u
Lực nâng, lực cản, lực đẩy của động cơ và momen chúc ngóc Myb =M sẽ
thay đổi khi thay đổi vận tốc u
Vì X=T-D ta có
uuTu
uDu
uXX
(3.95)
Hay uT
uD
uX
(3.96)
uX được gọi là đạo hàm của vận tốc
Từ đó
uTCu
uCuS
uX
DD
0020 2
2 (3.97)
(Chỉ số 0 ứng với trạng thái bay bình ổn)
Từ đó ta có
TuDDuXu CCCC 02 (3.98)
Với CDu, và CTu là sự thay đổi của hệ số cản và hệ số lực đẩy theo vận tốc
Đối với máy bay cánh quạt thì CTu giả thiết gần bằng CDo
Sự thay đổi của thành phần lực Z theo vận tốc u
00 221
LLu CCSuuZ
(3.99)
Dưới dạng hệ số
02 LLuZu CCC (3.100)
hay

69
002
2
21 LLZu CC
MMC
3.4. Đạo hàm do vận tốc góc q quanh yb
tttLt SQCLt
(3.111)
Do 0u
qltt nên ta có
ttt
LLt SQuqlCCLZ
tt0
(3.112)
Do SQ
ZCw
Z
Nên SS
uql
CQS
ZC ttLZ t
0
(3.113)
với w
t
HLZ
o
ZZq VC
qC
cu
ucq
CCt2
2
2
0
(3.114)
với cSSlV tt
H
Sự thay đổi momen chúc ngóc M do thay đổi lực nâng ở đuôi
cl
VCq
Ccu
uc
CC t
HLmm
m tq 2
2
2
0
0
(3.115)
3.5. Đạo hàm do sự thay đổi tốc độ của góc tấn α
Các hệ số phát sinh là do dòng chảy xuống ở đuôi xảy ra chậm hơn sự thay
đổi góc tấn ở cánh

70
Lúc góc tấn ở cánh thay đổi , dòng xoáy không khí quanh cánh sẽ thay đổi .
sự thay đổi dòng xoáy sẽ kéo theo sự thay đổi dòng chảy xuống ở đuôi, điều
này sẽ xảy ra trong một khoang thời gian 0u
lt t , thời gian Δt này chính là
thời gian khi các đường xoáy ở hai đầu cánh chuyển động tới đuôi
Sự thay đổi góc tấn ở đuôi
0ul
dtdt
dtd t
t (3.116)
Hay 00 u
ldd
ul
dtd
dd tt
t
(3.117)
Sự thay đổi lực nâng của đuôi bằng
tttLt SQCLt
(3.118)
Sự thay đổi của hệ số lực nâng theo phương z bằng
SS
ul
ddC
SSC
QSLC tt
Lt
tLt
z tt
0
(3.119)
ddVCC
cu
uc
CC HLzz
Z t2
2
2
0
0
(3.120)
Sự thay đổi của momen do sự chậm của dòng chảy xuống ở đuôi
SQClLlM ttLtttcg t
(3.121)
0ul
ddVCC t
HLm tcg
(3.122)
cl
ddVCC
cu
uc
CC tHL
mmm t
22
2
0
0
(3.123)

71
3.6. Đạo hàm do vận tốc xoay quanh xb, p
Nếu máy bay quay quanh trục dọc, vận tốc góc p sẽ tạo ra sự phân bố vận
tốc dài theo luật tuyến tính trên mặt đứng , mặt nằm ngang và cánh máy
bay. Các vận tốc dài sẽ làm thay đổi lực nâng , sinh ra mômen quay quanh
trục xb
Xét cánh máy bay khi máy bay quay quanh trục xb với vận tốc góc p dương
Phần cánh quay xuống, góc tấn α tăng lên và làm lực nâng cũng tăng lên
Phần cánh bị quay lên , góc tấn α giảm và lực nâng cũng giảm. Sự thay đổi
lực nâng sẽ tạo ra một mômen ΔMxb=ΔL quay ngược chiều với p
Tính hệ số cản quay Clp do mặt cánh gây ra
Sự thay đổi lực nâng –Z tại y trên diện tích cdy
QcdycZd l )( (3.124)
Trong đó
0upy
Momen quay do sự thay đổi lực khí động trên diện tích cdy bằng
QcydyupycyZddL l
0
)( (3.125)
Tổng momen tác dụng lên cánh
2/
0 0
2b
l QcydyupycL (3.126)
Hệ số Cl được tính
dycycSbu
pCb
ll2
2/
00
2 (3.127)
Để đơn giản độ dốc Clα(y) của mặt cắt cánh được thay bởi hệ số CLαw của
cánh, lúc đó phương trình trên có dạng

72
dycyup
SbC
Cb
Lt
w
2/
0
2
0
2 (3.128)
Hệ số Clp:
dycyup
SbC
upbC
Cb
Llt
w
2/
0
2
02
0
4
2
(3.129)
3.5. Đạo hàm do vận tốc góc quanh trục Zb ,r
Các hệ số ổn định Cyr, Cnr ,Clr do vận tốc góc r gây ra
Chuyển động quay quanh trục zb sẽ tạo ra lực ngang Y tác dụng lên các mặt
thẳng đứng của máy bay. Góc tấn của đuôi đứng của máy bay sẽ thay đổi và
do đó sẽ thay đổi lực ngang tác dụng lên đuôi đứng
Vận tốc góc r dương sẽ tạo ra góc tấn âm đối với đuôi đứng, lực ngang Y tác
dụng lên đuôi đứng:
(3.130)
Trong đó 0u
rlvv
Dưới dạng hệ số phương trình có dạng
SS
urlC
QS
SQurlC
C vv
vL
vvv
L
y v
v
0
0 (3.131)
Trong đó QQv
v
Hệ số ổn định Cyr được định nghĩa:
bl
SSC
urb
CC vv
vLy
yr v
2
2 0
(3.132)
Số hạng tyv
vL CSSC
( t: tail chỉ số đuôi )
Nên
vvL SQCYv

73
blCC v
tyyr 2 (3.133)
tyC : là hệ số lực ngang so với góc lệch cạnh β
Momen quay quanh trục z :
vvvv
Lv lSQurlCYlN
v
0 (3.134)
Dưới dạng hệ số
vvv
Ln Vurl
CCv
0 (3.135)
Trong đó Sb
lSV vvv
Hệ số ổn định Cnr được định nghĩa
blVC
urbCC v
vvLn
nr v
2
2 0
(3.136)
Ta suy ra 2
2
blCC v
tynr
4. Phương trình chuyển động dưới dạng ma trận
Để có hệ 8 phương trình bậc nhất 8 ẩn ta sử dụng các biểu thức gần đúng sau
rqp .tancos.tansin
r.sincos (3.137)
Đơn giản phương trình trên ta có:
rp 0tan
q (3.138)
Ta có các phương trình sau:

74
TTwu XXgwXuXudtd
0cos
Teqwuw
TeZZqZugwZuZ
Zw
dtd
00sin
11
Teqwuw TeMMqMwMuM
dtwdMq
dtd
(3.139)
Biến đổi phương trình ta thu được ma trận sau
BAxx (3.140)
Trong đó
Tpwux ,,, (3.141)
TTex , (3.142)
0110
1sin0cos0
*0**
0**
**0
**0
wqwqwwwuwu
qwu
wu
Zg
ZuMMZMMZMM
ZuZZgXX
A
(3.143)
00
**
**
TTee
Te
Te
ZMMZMMZZXX
Bww
(3.144)
Trong đó
w
uu Z
ZZ
1
* w
ww Z
ZZ
1
* w
qq Z
ZZ
1*
w
ee Z
ZZ
1
* ,
wZuu
10*
0 (3.145)
Nếu bỏ qua các đại lượng wZ và Zp và coi θ0 = 0 thì ma trận A và B có dạng
đơn giản

75
001000
0
0
0
uMMZMMZMMuZZ
gXX
Awqwwwuwu
wu
wu
(3.146)
00TTee
Te
Te
ZMMZMMZZXX
Bww
(3.147)
Ta có phưong trình
DCyy (3.148)
Trong đó
Trpvy ,,, (3.149)
Tray , (3.150)
0tan10
0
0
cos)(
0
******
******
00
rx
xzrp
x
xzpv
x
xzv
rx
xzrp
x
xzpv
x
xzv
ryv
LII
NLII
NLII
N
NII
LNII
LNII
L
gYuYY
C
(3.151)
00
0
****
****
rraa
rraa
r
LIINL
IIN
NIILN
IIL
Y
D
x
xz
x
xz
x
xz
x
xz
(3.152)

76
Trong đó
zx
xz
vv
III
LL 2*
1
zx
xz
vv
III
NN 2*
1 (3.153)
Nếu vật bay có trục xb đối xứng thì Ixz=0 và ma trận C, D có dạng
0tan1000
cos
0
00
rpv
rpv
rpv
NNNLLL
gYuYY
C
(3.154)
00
0
ra
ra
e
NNLLY
D
(3.155)
Trong một số trường hợp ta sử dụng góc Δβ thay cho Δv , quan hệ giữa Δβ
và Δv
00
1tanu
vu
v
Trường hợp Ixy = 0
Ta có phương trình
r
a
rp
rp
rp
ra
ra
r
NNLLuY
rp
NNNLLL
ug
uY
uY
uY
rp
00
0
0tan1000
cos1
0
0
0
0
000
(3.156)

77
3.4. Ảnh hưởng của gió và dòng chảy rối không khí
Máy bay bay trong khí quyển nên chịu tác động của gió và nhiễu động
1. Gió
Theo tiêu chuẩn hàng không quốc tế ICAO thì ta có thể xác định vận tốc gió
theo độ cao
347.14087.02545.0
15.9
HVV ww 0<H<300m (3.157)
15.986585.2 ww VV H>300m (3.158)
Khi máy bay bay ở độ cao bé, nếu có dông sẽ rất nguy hiểm vì vận tốc gió
thay đổi theo độ cao cả về phương và độ lớn . Sự thay đổi của vận tốc gió
gây ra tại vùng tiếp xúc của hai luồng không khí chảy ngược chiều nhau

78
Ta xác định
dhdhdu
u gg
dhdhdv
v gg (3.160)
dhdh
dww g
g
Theo tiêu chuẩn hàng không quốc tế ICAO thì sự thay đổi vận tốc gió ngang
xem là nhẹ nếu dhdug và
dhdvg nằm trong từ 0 đến 0,08s-1
Trung bình nếu nằm trong khoảng 0,08 dến 0,15 s-1
Mạnh trong khoảng 0,15 đến 0,2 s-1 và rất mạnh nếu lớn hơn 0.2s-1
4. Dòng chảy rối không khí
Vận tốc không khí thực chất là một trường, quá trình ngẫu nhiên nên vận tốc
không khí biến đổi theo không gian và thời gian một cách ngẫu nhiên. Để
nghiên cứu chuyển động rối của không khí và chuyển động của máy bay
trong dòng rối ta sử dụng khái niệm về quá trình ngẫu nhiên. Một trong
những đặc trưng quan trọng của hàm ngẫu nhiên là khái niệm về phương sai
và mật độ phổ công suất
Hàm phổ của Karman được sử dụng rộng rãi để mô tả dòng rối của không
khí
6
52
2
339.11
12
u
uuuu
L
LSggg
6112
2
2
339.11
339.13812
v
vv
vvv
L
LLS
ggg (3.161)

79
6112
2
2
339.11
339.13812
w
ww
www
L
LLS
ggg
Trong đó ggg wvu ,, tương ứng là độ lệch chuẩn của ug , vg , wg
2
với λ là chiều dài bước sóng
0u
L là chiều dài xác định quy mô của dòng rối
Ta có hàm truyền của dòng rối là
j
VLuV
LuH uug
1
121
22
1
312
jVLv
jVLv
VLvH vvg (3.162)
23
1
312
jV
L
jV
L
VLH wwg

80
CHƯƠNG 4
ỔN ĐỊNH ĐỘNG HỌC MÁY BAY 4.1. Một số khái niêm cơ bản
1. Biên độ phức của hàm điều hoà
Một hàm điều hoà theo thời gian được biểu diễn bởi phương trình
)cos()( tatx (4.1)
Trong đó a là biên độ phức , ω là tần số, φ là góc pha của x(t)
Dùng một hàm phức có dạng
j
tj
aexextz
ˆˆ)( (4.2)
sử dụng phương trình Euler
sincos je j (4.3)
Ta sẽ có quan hệ giữa x(t) và z(t) như sau
)](Re[)( tztx (4.4)
x là biên độ phức của x(t)
Như vậy biên độ phức của hàm tuần hoàn chứa thông tin cả biên độ a và góc
φ của hàm x(t). Nếu biết biên độ phức x thì từ phương trình trên ta có
)ˆ(arg)ˆ(ˆ
xumentxabsxa
(4.5)
2. Biên độ phức của hàm bất kỳ. Phép biến đổi Fourier
Giả thiết x(t) là hàm bất kỳ theo thời gian lúc đó biên độ phức )(ˆ x được
định nghĩa là phép biến đổi Fourier của x(t)
dtetxtxFx tj
)()(ˆ (4.6)
Phép biến đổi Fourier có dạng

81
(4.7)
Vì x(t) là hàm thực nên ta có
dextx tj ])(ˆ[Re1)(0
(4.8)
Từ đó ta có thể coi một hàm bất kỳ x(t) như tập hợp của rất nhiều hàm điều
hoà với tần số từ 0 đến trong đó ứng với tần số ω biên độ phức bằng
dtxFdx )]([)(ˆ
(4.9)
3. Phép biến đổi Laplace
Lúc sử dụng phép biến đổi Fourier đê tính biên độ phức theo phương trình
(4.6) hàm x(t) cần thoả mãn điều kiện
dttx )( (4.10)
Thực tế để thoả mãn điều kiện này hàm x(t) cần thiết chỉ tồn tại trong
khoảng thời gian nhất định
Thay cho hàm x(t) ta xét hàm x(t)e-αt với α>0 và chọn α đủ lớn để
dtt-x(t)e (4.11)
Phép biến đổi Fourier có dạng
dtetxtxF tj )()()]([ (4.12)
dtexxinvFtx tj
)(ˆ21)](ˆ[)(

82
Đặt s=α+jω với giả thiết x(t)=0 lúc t<0 phép biến đổi trên có phép biến đổi
Laplace
)()()]([ sXdtetxtxL st (4.13)
Phép biến đổi Laplace ngược
j
j
stdsesXj
sinvL
)(
21)](X[ (4.14)
4.2. Tính chuyển động dọc của máy bay
1. Ma trận hàm truyền và ma trận độ cứng khí động của máy bay trong
chuyển động dọc trục
Trong trường hợp máy bay chuyển động trong vùng không khí bị nhiễu động
phương trình chuyển động dọc của máy bay có dạng
Tgggx
TTex
Txx
qwu
qwux
ABAxx
,,
),(,,,
'
(4.15)
A, B, A’ là các ma trận hệ số của chúng phụ thuộc vào các đạo hàm khí
động, ξ là véctơ đầu vào do chuyển động của gió, η là véctơ điều khiển, x là
véctơ đầu ra biểu diễn chuyển động của máy bay
Để giải phương trình này ta giả thiết tjextx ˆ)( (4.16)
Trong đó x là véctơ biên độ phức của x
Tqwux ,ˆ,ˆ,ˆˆ (4.17) tj
xx e ˆ (4.18)

83
tjxx e ˆ (4.19)
Trong đó
Tgggx
TTex
qwu ˆ,ˆ,ˆˆ)ˆ,ˆ(ˆ
(4.20)
Thay thế các phương trình trên vào phương trình 4.15 với
xjtx
exjtx tj
ˆ)(ˆˆ)(
(4.21)
Ta có phương trình sau
xx ABxIjA ˆ'ˆˆ (4.22)
Giải phương trình này theo x
xx ABIjAx ˆ'ˆˆ 1 (4.23)
Phương trình này có thể viết dưới dạng
xx HHx ˆˆˆ (4.24)
Trong đó
'1
1
AIjAH
BIjAH
(4.25)
Hη và Hξ được gọi là ma trận hàm truyền của đầu ra x tương ứng đối với các
đầu vào x và x
Trong trường hợp 0ˆ x (không có điều khiển) phương trình có dạng
xAxIjA ˆ'ˆ (4.26)
Hay
11)'(
ˆˆ
HIjAAKxK x (4.27)

84
Ma trận K gọi là ma trận độ cứng khí động của máy bay
Trong trường hợp các véctơ x ,ηx , ξx không phải là các véctơ hàm điều hòa
của t các phương trình này vẫn đúng , thay vì các biên độ phức tính theo
phương trình 4.2 ta sử dụng phương trình 4.6 của phép biến đổi Fourier
Thực hiện phép biến đổi Laplace đối với phương trình 4.10 ta có phương
trình giống phương trình 4.22 trong đó thay thế jω bởi s và biên độ phức
)(ˆ jx bởi X(s)
)(')()( sAsBsxsIA xx (4.28)
từ đấy ta được
)()()( sHsHsx xx (4.29)
Trong đó
')(
)(1
1
AsIAsH
BsIAsH
(4.30)
Trong phương trình trên thì )(sx và )(sx là véctơ mà các thành phần của nó
là phép biến đổi Laplace của các thành phần của véctơ )(tx và )(tx
Sau khi có được vectơ x(s) bằng phép biến đổi Laplace ngược ta nhận được
véctơ x(t)
2. Tính chuyển động dọc của máy bay dưới tác động của không khí bị
nhiễu động
Trong trường hợp không khí bị nhiễu động do gió, véctơ biên độ phức của
chuyển động dọc của máy bay được xác định từ phương trình 4.24 với 0ˆ x
xHx ˆˆ
Biết véctơ biên độ phức x , véctơ x(t) được x(t) được xác định từ phương
trình 4.4, 4.7
)ˆRe()( tjextx (4.31)

85
Hay
(4.32)
Phương trình 4.31 được sử dụng lúc vận tốc gió là các hàm điều hoà tần số ω
và phương trình 3.32 sử dụng lúc vận tốc gió là bất kỳ
3. Tính dao động dọc tự do của máy bay lúc không có điều khiển
Dao động tự do của máy bay xảy ra trong trường hợp không có lực cản khí
động do gió tác động lên máy bay, hay là dao động lúc máy bay ở chế độ
bình ổn, các lực tác dụng lên máy bay ở trạng thái cân bằng
Từ phương trình 4.27 ta được phương trình tự do của máy bay
0ˆ xK (4.33)
Phương trình để xác định dao động tự do của máy bay
Det(K)=0 (4.34)
Từ phương trình IjAAK 1)'(
Phương trình 4.34 có dạng
0)( IjAIjADet (4.35)
Phương trình 4.35 gọi là phương trình tần số
Vì )( IjADet là phương trình bậc 4 đối với ω nên trong trường hợp tổng
quát phương trình 4.35 có 4 nghiệm 4321 ,,, trong đó mỗi tần số là một
số phức
kokk j (4.36)
Biết ωk từ phương trình 4.33 ta có phương trình để xác định véctơ biên độ
phức kx
0ˆ)( kk xK (4.37)
0ˆ kk xIjA (4.38)
Phương trình 4.38 là phương trình để xác định véctơ riêng
dexdtexxinvFtx tjtj ])(ˆ[Re1)(ˆ21)](ˆ[)(
0

86
Tkkkkk qwux ,ˆ,ˆ,ˆˆ (4.39)
Phương trình 4.38 là hệ 4 phương trình đại số tuyến tính, tuy nhiên định thức
của hệ phương trình này bằng không vì ωk là nghiệm của phương trình tần số
4.35 nên trong 4 phương trình chỉ có 3 phương trình là độc lập, phương trình
còn lại là phụ thuộc tuyến tính vào 3 phương trình kia
Như vậy có ba phương trình tuyến tính độc lập nhưng có 4 ẩn số. Cho một
trong 4 ẩn số một giá trị nào đó ta sẽ tính được 3 ẩn số còn lại. Vậy trong
bốn thành phần của véctơ riêng kx ta có thể tuỳ ý chọn một thành phần . Ví
dụ ta chọn k là tuỳ ý và tính các thành phần còn lại theo k
Để tính toán ta chia hệ phương trình 4.38 cho k và bỏ phương trình thứ 4
ta được 3 phương trình với các ẩn số tương ứng là k
k
k
k
k
k qwu ˆˆ
,ˆˆ
,ˆˆ
như sau
0
ˆˆˆˆˆˆ
34333231
24232221
14131211
k
k
k
k
k
k
k
k
k
q
w
u
AjAAAAAjAAAAAjA
(4.40)
Như vậy các thành phần của véctơ riêng kx phụ thuộc một hằng số tuỳ ý
kkC (4.41)
kk
T
k
k
k
k
k
kkk xCqwuCx 0ˆ1,ˆ
ˆ,ˆ
ˆ,ˆ
ˆˆ
(4.42)
T
k
k
k
k
k
kk
qwux
1,ˆˆ
,ˆˆ
,ˆˆˆ0
(4.43)

87
Ba thành phần đầu của véctơ kx0ˆ là nghiệm của hệ phương trình 4.40, trong
trường hợp tổng quát các thành phần này là các số phức
kbkak xjxx ˆˆˆ0 (4.44)
với kbka xx ˆ,ˆ tương ứng là phần thực và phần ảo của kx0ˆ
Ta có phương trình véctơ sau
)ˆRe()ˆRe()( tjko
tk
tjkk
okkk exeCextx
4. Dao động dọc trục của máy bay khi có điều khiển đuôi lái ngang δe
Ta sử dụng phép biến đổi Laplace để tính dao động dọc trục của máy bay lúc
ξx =0 và 0x
Từ phương trình 4.29 cho ξx =0 ta có
ssHsx x (4.45)
Ma trận B được tính với giả thiết là
0TTT
MZX
0M0Z000
e
e
e
e
ZM
XB
w
(4.46)
Tex
Tex
ss
tt
0),(
0),()(
(4.47)
Trong đó )(se là biến đổi Laplace của )(te

88
Từ phương trình 4.37 ta tính được x(s), sử dụng biến đổi Laplace ngược ta
tính được x(t)
4.3. Tính chuyển động ngang của máy bay
Phương trình chuyển động ngang của máy bay có dạng
yy CDCyy ' (4.48)
Trong đó biến v thay bởi ouv
Tray
T
ggo
gy
T
rpuv
rpy
,
,,
,,,
(4.49)
C, D, C’ là các ma trận được tính ở phần trên
Giống như chuyển động dọc phương trình để tính tần số dao động ngang có
dạng
0 CICIDet (4.50)
Có nghiệm dạng
kokk j (4.51)
Điều kiện để chuyển động ngang ổn định là các phần thực của các nghiệm
ωk (k=1,2,3,4) là âm
Véctơ riêng ứng với tần số ωk được xác định từ phương trình
0ˆ kk yIC (4.52)
Tương tự trường hợp dọc trục thì ta có ba nghiệm độc lập và một
nghiệm chọn tuỳ ý
Tkkkkk rpCy 1,ˆ,ˆ,ˆˆ (4.53)

89
Với Ck là hằng số tuỳ ý
Các thành phần kkk rp ˆ,ˆ,ˆ được tính toán nhờ ba phương trình đầu
của 4.52
Để tính dao động ngang lúc biết véctơ điều khiển ηy và véctơ ξy ta có thể
dùng phương pháp biến đổi Laplace
Phương trình 4.48 viết dưới dạng biến đổi Laplace
)(')()()( sCsDsysIC yy (4.54)
Trong đó
Tgggy
Tray
T
srspsvs
sss
ssrspssy
)(),(),()(
)(),()(
)(),(),(,)(
(4.55)
Với y(s), ηy(s), ξy(s) là biến đổi Laplace của y(t), ηy(t), ξy(t)
Từ 4.54 ta có
)(')()()()( 1 sCsDsICsysIC yy (4.56)
Biết y(s) ta sẽ tính được y(t) nhờ phép biến đổi Laplace ngược
5.Tiêu chuẩn đánh giá tính chất lượng máy bay
Tiêu chuẩn đánh giá trên quan điểm tính ổn định và điều khiển
Chất lượng phụ thuộc vào từng loại máy bay và giai đoạn bay
Phân loại máy bay dựa vào kích thước và khả năng cơ động của chúng
Hạng I Máy bay nhỏ, nhẹ
Hạng II Máy bay trọng lượng trung bình, khả năng cơ động chậm đến
trung bình

90
Hạng III Máy bay lớn, nặng khả năng cơ động chậm đến trung bình
Hạng IV Máy bay khả năng cơ động cao
Phân loại theo hạng máy bay
Loại A (giai đoạn
bay dài hạn)
Yêu cầu cơ động nhanh, đường bay chính xác, sự điều
khiển đường bay chính xác
Máy bay chiến đấu trên không, với mặt đất,
Bay trinh sát
Loại B (giai đoạn
bay dài hạn)
Vận hành từ từ, không cần điều khiển đường bay chính
xác
Giai đoạn bay lên cao, xuống thấp, bay bình ổn
Loại C (giai đoạn
bay cuối)
Vận hành từ từ, cần yêu cầu điều khiển đường bay chính
xác: gồm giai đoạn cất cánh , bay vòng và hạ cánh
Phân loại theo giai đoạn bay
Chất lượng máy bay thường được phân chia thành 3 mức:
Mức 1 Chất lượng thỏa mãn cho các giai đoạn bay theo yêu cầu
Mức 2 Chất lượng bay thoả mãn để hoàn thành giai đoạn bay
theo yêu cầu, nhưng phi công cần phải tăng công việc
hoặc giảm bớt nhiệm vụ
Mức 3 Chất lượng bay đảm bảo sao cho máy bay có thể điều
khiển an toàn nhưng phi công phải lam việc mệt mỏi
hoặc nhiệm vụ đề ra được thực hiện không đầu đủ
Chất lượng bay dọc của máy bay
Tần số dao động riêng và hệ số tắt dần là hai yếu tố quan trọng quyết định
chất lượng theo quan điểm dễ điều khiển

91
Chất lượng chuyển động dọc
Dạng dao động chu kỳ lớn
Mức 1 04.0
Mức 2 0
Mức 3 T > 55s
Dạng dao động chu kỳ bé
Loại A và C Loại B
Mức min max min max
1 0.35 1.3 0.3 4.0
2 0.25 4.0 0.2 4.0
3 0.15 - 0.15 -
Chất lượng chuyển động ngang của máy bay
Chuyển động ngang tự do của máy bay gôm các dạng chuyển động xoắn
ốc (Spiral mode ) chuyển động xoay nghiêng ( Roll mode) và chuyển
động vừa xoay vừa lắc ( Dutch roll mode)
Dạng xoắn ốc ( Spiral mode)
Thời gian tối thiểu để biên độ giảm một nửa 2
1T
Hạng Loại Mức 1 Mức 2 Mức 3
I và IV A 12s 12s 4s
B và C 20s 12s 4s
II và III Tất cả 20s 12s 4s

92
Dạng xoay nghiêng ( Roll mode)
Hằng số thời gian cực đại (s)
Hạng Loại Mức 1 Mức 2 Mức 3
I và IV A 1.0 1.4 10
II và III 1.4 3.0
Tất cả B 1.4 3.0 10
I và IV C 1.0 1.4 10
II và III 1.4 3.0
Dạng vừa xoay vừa lắc
Mức 1 Loại Hạng min )( 1
mins 1
minsn
1 A I, IV 0.19 0.35 1.0
II, III 0.19 0.35 0.4
B Tất cả 0.08 0.15 0.4
C I, II-C 0.08 0.15 1.0
IV
II-L, III 0.08 0.15 0.4
2 Tất cả Tất cả 0.02 0.15 0.4
2 Tất cả Tất cả 0.02 0.4
C, L ứng với máy bay đang bay hoặc hạ cánh

93
ÁP DỤNG KHẢO SÁT ỔN ĐỊNH ĐỘNG HỌC MÁY BAY 1.Các thông số của máy bay
Phân tích tính ổn định của máy bay Boeing 747
Ta có thông số của máy bay được cho như sau
Điều kiện bay
Gia tốc: g =34.174
Độ cao: H = 40000 ft
Khối lượng riêng không khí: rho = 0.00058727 slugs-cubic feet
Vận tốc âm thanh: a = 968.08 ft/s
Số Mach: M = 0.9
Vận tốc máy bay u0 = aM
Q = 0.5rho.uo2
Khối lượng và thông số hình học của máy bay
Khối lượng: W = 636600 lbs
m = W/g
Momen quán tính của máy bay
Ix = 18.2e6 slugs-sq.ft
Iy = 33.1e6 slugs-sq.ft
Iz = 49.7e6 slugs-sq.ft
Tích quán tính máy bay Ixz = 0.97e6 slugs-sq.ft
Diện tích cánh quy chiếu S = 5500 sq.ft
Dây cung cánh trung bình cbar = 27.31 ft
Sải cánh b = 195.68 ft

94
Thông số động học ổn định dọc trục
Clo = 0.5
Cdo = 0.042
CLalpha = 5.5
CDalpha = 0.47
CMalpha = -1.6
Clalphadot = 0.006
Cmalphadot = -9.0
CLq = 6.58
CMq = -25
CLm = 0.2
CDm = 0.25
CMm = -0.1
Cddeltae = 0.0
Cldeltae = 0.3
Cmdeltae = -1.2
Thống số động học ổn định ngang
Cybeta = -0.85
Clbeta = -0.1
Cnbeta = 0.20
Cyp = 0
CLp = -0.3
CNp = 0.2
Cyr = 0
CLr = 0.2
CNr = -0.325
Cldeltaa = 0.014
Cndeltaa = 0.003
Cydeltar = 0.075
Cldeltar = 0.005
Cndeltar = -0.09

95
2. Phân tích chất lượng máy bay
1. Chế độ bay dọc trục
Nghiệm đặc trưng
iwiw
iwiw
0048635,0002556,00048635.0002556,0
2777.147736,02777.147736.0
4
3
2
1
Các giá trị chu kỳ
Chu kỳ dài:
Thời gian giảm nửa biên độ: sT 18.2712
1
Chu kỳ: T=129.19
Số chu kỳ để giảm nửa biên độ : N=4.09303
Daming raitio và Frequency 05971.00509685.0
n
n
Chu kỳ ngắn
Thời gian giảm nửa biên độ: sT 45203.12
1
Chu kỳ T=4.91772
Số chu kỳ để giảm nửa biên độ : N = 0.294414
Daming raitio và Frequency 349514.03644.1n
n

96
2. Chế độ chuyển động ngang
Nghiệm riêng
0056422.037289.0
97701.016486.097701.016486.0
4
3
2
1
ww
iwiw
Roll mode
Thời gian giảm nửa biên độ: sT 8504.12
1
Hăng số thời gian 19822.21
pL
Dutch roll mode
Thời gian giảm nửa biên độ: sT 18529.42
1
Chu kỳ : T = 6.43102
Số chu kỳ để giảm nửa biên độ : N = 0,651883
Daming ratio và Frequency 0896469.000656.1n
n
Spiral mode
Thời gian giảm nửa biên độ: sT 293.1222
1
Kết quả bằng đồ thị
Ma trận A, B, A’

97
Ma trận chuyển động ngang C, D, C’

98
3.1.Chuyển động dọc trục
Các đồ thị nghiệm đặc trưng
Phugoid

99
Short period
Các đồ thị nghiệm riêng ứng với
Phugoid

100
Short period

101
3.4.Chuyển động ngang
Các đồ thị nghiệm đặc trưng
Roll mode

102
Dutch roll mode

103
Spiral mode

104
Các đồ thị nghiệm riêng
Roll mode

105

106
Dutch roll mode
Spiral mode

107
4.Biện luận kết quả
Kết quả đối với chuyển động dọc trục
Bốn nghiệm đặc trưng của chuyển động dọc trục có phần thực đều mang dấu âm
điều đó chứng tỏ máy bay thoả mãn điều kiện ổn định tĩnh dọc trục
Với dạng chuyển động chu kỳ dài
04.005971.00509685.0
n
n
Với dạng chuyển động chu kỳ ngắn
0.2349514.03.03644.1n
n
Vậy chất lượng bay dọc trục chu kỳ lớn đạt Mức 1
Chất lượng bay dọc trục chu kỳ bé đạt Mức 1

108
Kết quả đối với chuyển động ngang
Trong bốn nghiệm riêng của chế độ chuyển động ngang có 3 nghiệm có phần
thực âm ( ứng với chế độ chuyển động xoay nghiêng và chuyển động vừa xoay
vừa lắc), một nghiệm có phần thực dương ( ứng với chế độ chuyển động xoắn
ốc)
Với chuyển động xoay nghiêng
Hằng số thời gian sLp
319822.21
Vậy chất lượng chuyển động xoay nghiêng đạt mức 2
Với chuyển động vừa xoay vừa lắc
05.00902.002.00896469.0
4.000656.1
n
n
n
n
Vậy chất lượng chuyển động vừa xoay vừa lắc đạt mức 2
Tài liệu tham khảo
1. A.C. Kermode C - Mechanics of flight - 1995 2. ENSMA - POITIER . Qualite du Vol 3. D. Robert- C. Nelson. Flight Stability and Automatic Control. 2000
United State 4. John J. BERTIN - Micheal L. SMITH. Aerodynamics for Engineers 5. Daniel Cauvin -Jean Mermoz Edition 1983 . Aerodynamique-
Mecanique du vol
6. Nguyễn Xuân Hùng - Nhà XBQG 2004 - Động lực học và ổn định của
máy bay
7. Phạm Công Ngô - Nhà XBKHKT 1997 - Lí thuyết điều khiển tự động

109
8. Đồ án tốt nghiệp của Sinh viên ngành Hàng không từ khoá K-39 9. Daniel Cauvin -Jean Mermoz Edition 1983 . Aerodynamique-
Mecanique du vol 10. Tài liệu trên mạng: www. Interaction.com;www.mit.edu; www.nasa.gov








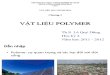






![[Nguoithay.org] co hoc vat ran hay](https://img.pdfslide.tips/doc/110x75/55636692d8b42a2f508b53fc/nguoithayorg-co-hoc-vat-ran-hay.jpg)




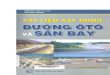



![[Nguoithay.vn] co hoc vat ran hay](https://img.pdfslide.tips/doc/110x75/5589ccadd8b42a522e8b4576/nguoithayvn-co-hoc-vat-ran-hay.jpg)




