-
8/19/2019 Complex Rotations / Комплексне ротације
1/20
КОМПЛЕКСНЕ РОТАЦИJЕкомплексни броjеви и ротациjе
Растко Вуковић, проф∗.
8. mart 2016
Sažetak
Обрађени су елементарни комплексни броjеви, комплексна раван и
некенеобичне примене у геометриjи. Раван чиjа ордината садржи
имагинарне броjеве
називамо псеудо-комплексна раван и добиjамо хиперболну
тригонометриjу са
применом на Аjнштаjнову релативност. Разматрана су и поопштења
комплексних
броjева на кватернионе, као и Паулиjеве матрице квантне
механике. У позадини
су стално присутне ротациjе.
Предговор
Оваj текст jе требао бити резиме неколико прилога наведених на
краjу и ниjетребао бити за jавну употребу. Свеjедно би могао
завршити на интернету где радо
остављам своjе приватне текстове из математике, да их не
загубим. Ту немам штада криjем.
Ротациjе су ваљда jедноставна а опет чудно компликована ствар.
Сваки путкада о њима размишљам откривам их у детаљима, или крупно
до помисли да сесве апстрактне трансформациjе па и многе физичке
поjаве даjу на њих свести. Са
jедне стране, ротациjе су елементарна ствар позната од
памтивека и зато „сигурнои дефинитивно” сасвим истражена, а опет,
много тога новог исувише се лако испонтано подводи под те исте
ротациjе.
Што се тиче нивоа излагања, настоjаћу да пишем jедноставно, као
да се обраћамученицима гимназиjе, мада ово за такве ниjе1. Покушаћу
да одржим приближноисти ниво од дефинисања природних броjева, па до
тумачења матрица квантне
механике, или метричког тензора релативистичке теориjе
гравитациjе. Надавно даће већ и сам такав циљ бити подухват по
себи.
∗Гимназиjа Бања Лука1Наше законодавство ниjе толерантно на
инициjативе предавача.
1
-
8/19/2019 Complex Rotations / Комплексне ротације
2/20
Р. Вуковић: Комплексне ротациjе
1 Увод
Знамо да су 1, 2, 3, . . .
природни броjеви и да њихов скуп означавамо са N.
Када
овом скупу додамо нулу и негативне такве броjеве добиjамо скуп
целих броjеваZ = {0,±1,±2, . . . }. Скуп
разломака или рационалних броjева означавамо
Q = {mn m ∈ Z ∧ n ∈ N}.
Међутим, величине попут диjагонале jединичног
квадрата√
2 = 1, 41421 . . . илиоднос обима и
пречника круга π = 3, 14159 . . .
изражавамо помоћу ирационалних броjевиа. Скуп свих ових
заjедно означавамо са R и називамо
реалним броjевима.
Са становишта алгебре (решавања jедначина), свака од поменутих
врста броjеваима мањкавости. Рецимо, jедначина 2z + 3
= 1 има коефициjенте природне броjеве2, 3, 1
∈ N, али jоj решење z = −1
∈ Z ниjе природан броj. Jедначина 9z2 − 4
= 0
има коефициjенте 9,−4, 0 ∈ Z, али таква нису
и њена решење z = ±2
3 ∈ Q. Решење jедначине z2 − 2 =
0 су ирационални броjеви z =
±√ 2. Коначно, решења z =
±√ −1 jедначине z2 + 1 = 0 уопште
нису реални броjеви, мада сви њени коефициjенти (1 и0) то
jесу.
Броj i =√ −1 називамо имагинарна
jединица . Броjеве облика iy где jе y
реалан
броj, називамо имагинарним , а броjеве облика
z = x + iy, где су оба x и
y реалниброjеви,
називамо комплексним броjевима. Реални део тог
комплекса jе R(z) = x, аимагинарни део I(z)
= y. Дакле оба R(z) и I(z) су
реални броjеви.
Комплексни броjеви нам требаjу да бисмо заокружили систем
коефициjената ирешења алгебарских jедначина:
c0 + c1z + c2z2
+ ⋅ ⋅ ⋅ + cnzn = 0. (1)
Када су коефициjенти c0, c1, . . . , cn било какви
броjеви, тада постоjи комплексан броjz такав да jе наведена
jеднакост тачна. Скуп комплексних броjева означавамо са
C.Приметимо да jе:
N ⊂ Z ⊂ Q ⊂ R ⊂ C, (2)
тj. природни броjеви су потскуп целих, цели су потскуп
рационалних, рационалнису потскуп реалних, а реални су потскуп
комплексних.
Из начина како jе идеjа броjева проширена зарад потреба
алгебарских jедначина,произилазе закони комутациjе, дистрибуциjе и
асоциjациjе сабирања и множењаових комплекса. Са тако дефинисаним
операциjама, скуп C чини поље .
Кратко
кажемо, поље C комплексних броjева jе алгебарски
затворено. Ово послење jезаправо jедан од еквивалентхих исказа тзв.
основне теореме алгебре, да свакаалгебарска jедначина (1) има бар
jедно решење, односно2 да их има n. Практичнии теориjски
значаj „нових” броjева тек сада почиње.
2ово се затим доказуjе
Гимназиjа Бања Лука 2
-
8/19/2019 Complex Rotations / Комплексне ротације
3/20
Р. Вуковић: Комплексне ротациjе
2 Комплексна раван
Сваки комплексни броj облика z = x +
iy, где су x, y ∈ R, можемо
представити
тачком са координатама (x, y) у Декартовом правоуглом
систему координата Oxy.Апсцису (x-осу) тада чине реални
делови комплексних броjева, а ординату (y-осу)имагинарни. Скуп свих
комплексних броjева C тако постаjе скуп тачака комплекснеравни
C. Оваква репрезентациjа се види на слици 1.
Slika 1: Комплексна раван C.
Удаљеност од исходишта O до комплексног броjа
z, тачке z, назива се модуо комплексног
броjа z коjи пишемо z. Угао између позитивног
смера реалне осе(апсцисе) и орjентисане дужи Oz
назива се аргумент комплексног броjа z коjипишемо
arg
(z
). Са слике 1 лако читамо:
z = x2 + y2 = ρ, arg(z)
= arctg yx = ϕ, (3)
односно обратно:x = ρ cos ϕ, y = ρ sin ϕ.
(4)
Према томе, комплексни броj z = x + iy
можемо писати:
z = ρ(cos ϕ + i sin ϕ). (5)То jе
репрезентациjа броjа z у поларним координатама.
Теорема 2.1. За све комплексне броjеве z1
= x1 + iy1 и z2
= x2 + iy2 важи:1. z1z2 = (x1x2
− y1y2) + i(x1y2 + y1x2);2. z1z2
= z1z2;3. arg(z1z2) = arg(z1) +
arg(z2).
Доказ. 1. Непосредним множењем, због закона
дистрибуциjе, добиjамо:
z1z2 = (x1 + iy1)(x2 + iy2)
= x1x2 + ix1y2 + iy1x2 −
y1y2,Гимназиjа Бања Лука 3
-
8/19/2019 Complex Rotations / Комплексне ротације
4/20
Р. Вуковић: Комплексне ротациjе
одакле због закона комутациjе, груписањем сабирака следи тражена
jеднакост.2. Из претходног израза налазимо:
z1z2 = (x1x2 − y1y2) + i(x1y2 + y1x2)
= ρ x1x2 −
y1y2ρ
+ i x1y2 +
y1x2ρ , (6)
где jе ρ = (x1x2 − y1y2)2 + (x1y2 +
y1x2)2. Приметимо да jеx1x2 − y1y2
r 2 + x1y2 + y1x2
r 2 = 1,
што значи да jе ρ = z1z2, а разломци
су (x1x2−y1y2)ρ = cos ϕ и (x1y2+y1x2)ρ
= sin ϕ,где jе ϕ = arg(z1z2).
3. Покажимо да jе угао ϕ збир углова ϕ1
= arg(z1) и ϕ2 = arg(z2). Из:z1
= x1 + iy1 = x21 + y21
x1 x2
1 + y2
1
+ i y1 x21 + y2
1 , (7)
следи да постоjи угао ϕ1 такав да jе:
cos ϕ1 =x1
ρ1, sin ϕ2 =
y1
ρ1, ρ1 =
x21 + y2
1, (8)
jер jе cos2 ϕ1 + sin2 ϕ1 =
1. Слично налазимо за z2. Након тога користимо иначе
познате адиционе формуле тригонометриjе:
cos
(ϕ1 + ϕ2
) = cos ϕ1 cos ϕ2 − sin ϕ1 sin ϕ2
= x1x2ρ1ρ2
− y1y2ρ1ρ2
= x1x2 − y1y2 x21 + y2
1 x2
2 + y2
2
=
x1x2 − y1y2 x21
x22 + x2
1y22 + y2
1x22 + y2
1y22
=
x1x2 − y1y2 (x21
x22 − 2x1x2y1y2 + y
21
y22) + (x2
1y22 + 2x1x2y1y2 + y
21
x22)
=
x1x2 − y1y2 (x1x2 − y1y2)2 + (x1y2 +
x2y1)2 =x1x2 − y1y2
ρ ,
cos
(ϕ1 + ϕ2
) = cos ϕ.
Такође налазимо sin(ϕ1 + ϕ2) = sin ϕ1 cos
ϕ2 + cos ϕ1 sin ϕ2 = sin ϕ.Приметимо да jе доказ
ове теореме сасвим другачиjи од оних (геометриjских)
у прилогу [1], коjе би сада било досадно понављати. Такође jе
сасвим другачиjи идоказ следеће теореме.
Заменом i → −i комплексни броj z
= x + iy мењамо у њему коњугован z̄
= x − iy.У комплексноj равни, коњуговано комплексни
броjеви z и z̄ су осно симетрични
уодносу на реалну осу, као што се види на слици 1.
Гимназиjа Бања Лука 4
-
8/19/2019 Complex Rotations / Комплексне ротације
5/20
Р. Вуковић: Комплексне ротациjе
Теорема 2.2. За све комплексне броjеве z1
= x1 + iy1 и z2
= x2 + iy2 важи:1. z̄1z2
= (x1x2 + y1y2) + i(x1y2 − y1x2);2. R
(z̄1z2
) =
z1
z2
cos θ;
3. I(z̄1z2) = z1z2 sin θ;где jе θ
= ∠z1Oz2 угао између орjентисаних дужи Oz1
и Oz2. Доказ. 1. Следи сменом
y1 → −y1 из претходне, став 1. теорема 2.1.
2. Применимо косинусну теорему на троугао Oz1z2:
z1z22 = z12 + z22 − 2z1z2 cos θ.Отуда:
z1z2 cos θ = 12(z12 + z22 − z1z22) =
=
1
2[(x2
1
+ y2
1)+
(x2
2
+ y2
2)−
(x1 − x2
)2−
(y1 − y2
)2
]=
1
2[2x1x2 + 2y1y2] = R(z̄1z2),z1z2 cos θ =
R(z̄1z2),
што jе и требало доказати.3. Користимо тригонометриjски
идентитет cos2 θ + sin2 θ = 1, односно:
z12z22 sin2 θ = z12z22 − z12z22 cos2 θ
== (x21 + y21)(x22 + y22) − (x1x2 +
y1y2)2
=
x
2
1y
2
2
−
2x1
x2
y1
y2 +
y
2
1x
2
2
= (x1y2 − y1x2)2 = I2(z̄1z2),z1z2 sin θ =
I(z̄1z2),
што jе и тражено.
У аналогиjи са векторима, можемо дефинисати скаларни
производ и интензитетвекторског производ
датих комплексних броjева, изразима:
z1 ⋅ z2 = R(z̄1z2), z1 × z2
= I(z̄1z2). (9)Овим дефинициjама придружимо
дефинициjе3 сложеног збира и сложене
разлике
комплексних броjева, редом:
z1 ⊕ z2 =1
2(z̄1z2 + z1z̄2), z1 ⊖ z2 = 1
2(z̄1z2 − z1z̄2), (10)
за коjе jе лако проверити jеднакости:
z1 ⊕ z2 = R(z̄1z2), z1 ⊖ z2
= iI(z̄1z2). (11)3Ознаке су први пут употребљене у
тексту [1], дакле произвољне.
Гимназиjа Бања Лука 5
-
8/19/2019 Complex Rotations / Комплексне ротације
6/20
Р. Вуковић: Комплексне ротациjе
Први израз (збир) подсећа на „реални производ” комплексних
броjева (тj. скаларнипроизвод) из математичке литературе, али
видећемо да то ниjе то.
Нека jе у комплексноj равни дат троугао са теменима A,
B, C и наспрамним
страницама a, b, c, комплексним броjевима:
A = Ax + iAy, a = C − B
= ax + iay,
B = Bx + iBy, b = A − C
= bx + iby,
C = C x + iC y, c
= B − A = cx + icy.
(12)
Коефициjенти Ax, Ay, . . . , cx, cy су реални
броjеви, а i =√ −1 jе имагинарна
jединица.
Лако jе показати да jе тачка T = 13(A +
B + C ) тежиште4, да jе I(āb)
двострука
површина троугла5, али можда нису очигледне jедначине
висина AA′, BB ′, CC ′,приказане на
слици 2.
Slika 2: Троугао ABC у равни C.
Имагинарна jединица jе комплексан броj са модулом jедан и
аргументом правимуглом. На основу теореме 2.1, комплексни броj
z помножен броjем i биће ротирану броj
iz, такав да jе iz = z и iz ⊥
z. Посебно, комплексан броj −ia
представљаћеорjентисану дуж jеднаке дужине као и страница
a, али окомиту на њу и усмеренуод темена A ка
подножjу висине A′ датог троугла ABC .
Према томе, тачке на правим линиjама на коjима леже висине
AA′, BB′, C C ′ су
одређене параметром λ ∈
R у jеднакостима:Ah(λ) = A + ha(λ)
= A − λaiBh(λ) = B + hb(λ)
= B − λbiC h(λ) = C +
hc(λ) = C − λci. (13)
4видети прилог: [2], Example 2.1.5видети прилог: [2], Theorem
3.1.
Гимназиjа Бања Лука 6
-
8/19/2019 Complex Rotations / Комплексне ротације
7/20
Р. Вуковић: Комплексне ротациjе
Када jе λ = 0, тада jе рецимо Ah(λ)
= A, а када jе λ = λa
= 2µa2, где jе µ = µ(ABC )површина
троугла ABC , тада jе Ah(λ) = A′.
Наиме, из израза за површину троуглаµ = 1
2
a
ha
, за λa = 2µ
a
2 добjамо:
A′ − A = (A − λaai) − A = 2µa2 ai
= 2µa = ha,што значи A′ = A + ha.
Отуда:
λa = 2µa2 ⇒ A′ = A + ha(λa)
= A − λaaiλb = 2µb2 ⇒ B′ = B
+ hb(λb) = B − λbbiλc = 2µc2 ⇒
C ′ = C + hc(λc)
= C − λcci. (14)
Сва три параметра подножjа висина λa, λb и
λc су одређени позитивни реалниброjеви. Треба их
разликовати од произвољног (такође реалног) броjа λ
из (13)
коjи дефинише тачке висине.Затим у прилогу [2] можете
наћи доказе тврђења попут:
a2λa + b2λb + c2λc = 6µ, (15)a
∶ b ∶ c = 1ha ∶ 1hb ∶ 1hc
= 1√ λa ∶
1√ λb
∶1√ λc
, (16)
Aā + Bb̄ + C ̄c = 4iµ, (17)
A′
ā + B′
b̄ + C ′
c̄ = −2iµ, (18)
или иначе познате jеднакости у геометриjи:
d(A, C )2 + d(B, P )2 = d(B, A)2 + d(C,
P )2, (19)коjа каже да jе збир квадрата (дужине)
странице b и дужи BP , где jе
P ∈ AA′,
jеднак збиру квадрата (дужина) странице a и
дужи CP . Последња jеднакост семоже употребити за доказ
да се све три висине троугла секу у jедноj тачки H ,
коjасе као што знамо назива ортоцентар
троугла.
Положаj ортоцентра H дефинисао сам
изразима:
H = ha(ν a) = A −
ν aaiH = hb(ν b) = B −
ν bbiH = hc(ν c)
= C − ν cci, (20)
где одређени параметри ν a, ν b, ν c
∈ R не мораjу бити позитивни броjеви. За
тепараметре ортоцентра важе jеднакости:
a2(1 + ν 2a) = b2(1 + ν 2b )
= c2(1 + ν 2c ), (21)Гимназиjа Бања Лука
7
-
8/19/2019 Complex Rotations / Комплексне ротације
8/20
Р. Вуковић: Комплексне ротациjе
a2ν a + b2ν b + c2ν c
= 4µ, (22)или:
ν a = (−a2 + b2 + c2)4µ,ν b
= (a2 − b2 + c2)4µ,ν c = (a2 + b2 − c2)4µ,
(23)
коjе су наравно у прилогу и доказане.
3 Псеудо раван
Префикс псеудо (Грчки: pseudes - лажан) се користи за нешто што
„изгледа каода jесте а ниjе”. У том смислу je псеудо
раван раван дуална комплексноj равни.Рецимо, где jе
апсциса (x-оса) остала иста реална оса, али jе ордината (y-оса)
замењена имагинарном осом w , при чему jе w
= iy, i =√ −1.Дакле,
координате (x, y) комплексне равни C
пресликавамо у координате (x, w)псеудо равни
jедноставном сменом w = iy, и обратно y
= −iw. Доследно затим,преводимо сваку функциjу из
C у одговараjућу псеудо функциjу. Површина ab
∈ Cпостаjе iab, угао ϕ постаjе псеудо угао
iϕ, итд.
За сложениjе функциjе, ако нисмо сигурни како их превести у
одговараjућепсеудо функциjе, можемо користити њихове развоjе у
Теjлорове редове. Знамо дасе тригонометриjске функциjе могу писати
у развиjеном облику:
cos(ϕ) = 1 − ϕ22 +
ϕ4
4! −
ϕ6
6! +
ϕ8
8! − . . .
sin
(ϕ
) = ϕ − ϕ
3
3! +
ϕ5
5! −
ϕ7
7! +
ϕ9
9! − . . .
(24)
где jе n! = 1 ⋅ 2 ⋅
3 . . . n, тj. производ првих n узастопних
природних броjева, шточитамо „n факториjел”. Отуда
сабирањем:
cis(ϕ) = cos ϕ + i sin ϕ = eiϕ,
(25)где jе e = 2, 71828 . . . тзв. Оjлеров
броj, jер jе развоj ове експоненциjалне функциjе:
eϕ = 1 + ϕ +ϕ2
2 +
ϕ3
3! +
ϕ4
4! +
ϕ5
5! +
ϕ6
6! + . . . (26)
Претходна функциjа „косинус и синус” представља комплексан броj
jединичног модула
али произвољног аргумента ϕ.Сменом ϕ →
iϕ тригонометриjске функциjе (24) постаjу хиперболне6:
ch(ξ ) = 1 + ξ2
2 +
ξ4
4! +
ξ6
6! +
ξ8
8! + . . .
sh(ξ ) = ξ + ξ33! +
ξ5
5! +
ξ7
7! +
ξ9
9! + . . .
(27)
6Хиперболне, или хиперболичне функциjе jе увео у употребу
италиjански математичарВинченцо Рикати (Vincenzo Riccati,
1707-1775)
Гимназиjа Бања Лука 8
-
8/19/2019 Complex Rotations / Комплексне ротације
9/20
Р. Вуковић: Комплексне ротациjе
где jе стављено ξ = iϕ. Оне се називаjу
косинус и синус хиперболни. Из (26) лаконалазимо:
cos
(ϕ
) =
eiϕ+e−iϕ
2 , ch
(ξ
) =
eξ+e−ξ
2 ,
sin(ϕ) = eiϕ−e−iϕ2 , sh(ξ )
= eξ−e−ξ2 . (28)На графовима 3 су
приказане хиперболне функциjе, редом косинус и синус.
Хиперболни
тангенс th(ξ ) = sh(ξ)ch(ξ)
jе количник хиперболног синуса и косинуса датог угла.
Slika 3: Хиперболни косинус и синус.
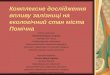
На следећоj слици7 4, лево на тригонометриjском кругу
(полупречника r = 1) судефинисане тригонометриjске
функциjе sin α, cos α и tg α, као
одсечци BC , OB иAD, а угао α
= ∠AOC jе половина централног угла над тетивом
KC .
Slika 4: Jединична кружница и хипербола.
7в. некадашњи (2005-06) моj прилог на Википедиjи:
https://sr.wikipedia.org/sr-ec/%D0%A5%D0%B8%D0%BF%D0%B5%D1%80%D0%B1%D0%BE%D0%BB%D0%B8%D1%87%D0%BD%D0%B0_%D1%82%D1%80%D0%B8%D0%
B3%D0%BE%D0%BD%D0%BE%D0%BC%D0%B5%D1%82%D1%80%D0%B8%D1%98%D0%B0
Гимназиjа Бања Лука 9
https://sr.wikipedia.org/sr-ec/%D0%A5%D0%B8%D0%BF%D0%B5%D1%80%D0%B1%D0%BE%D0%BB%D0%B8%D1%87%D0%BD%D0%B0_%D1%82%D1%80%D0%B8%D0%B3%D0%BE%D0%BD%D0%BE%D0%BC%D0%B5%D1%82%D1%80%D0%B8%D1%98%D0%B0https://sr.wikipedia.org/sr-ec/%D0%A5%D0%B8%D0%BF%D0%B5%D1%80%D0%B1%D0%BE%D0%BB%D0%B8%D1%87%D0%BD%D0%B0_%D1%82%D1%80%D0%B8%D0%B3%D0%BE%D0%BD%D0%BE%D0%BC%D0%B5%D1%82%D1%80%D0%B8%D1%98%D0%B0https://sr.wikipedia.org/sr-ec/%D0%A5%D0%B8%D0%BF%D0%B5%D1%80%D0%B1%D0%BE%D0%BB%D0%B8%D1%87%D0%BD%D0%B0_%D1%82%D1%80%D0%B8%D0%B3%D0%BE%D0%BD%D0%BE%D0%BC%D0%B5%D1%82%D1%80%D0%B8%D1%98%D0%B0https://sr.wikipedia.org/sr-ec/%D0%A5%D0%B8%D0%BF%D0%B5%D1%80%D0%B1%D0%BE%D0%BB%D0%B8%D1%87%D0%BD%D0%B0_%D1%82%D1%80%D0%B8%D0%B3%D0%BE%D0%BD%D0%BE%D0%BC%D0%B5%D1%82%D1%80%D0%B8%D1%98%D0%B0https://sr.wikipedia.org/sr-ec/%D0%A5%D0%B8%D0%BF%D0%B5%D1%80%D0%B1%D0%BE%D0%BB%D0%B8%D1%87%D0%BD%D0%B0_%D1%82%D1%80%D0%B8%D0%B3%D0%BE%D0%BD%D0%BE%D0%BC%D0%B5%D1%82%D1%80%D0%B8%D1%98%D0%B0https://sr.wikipedia.org/sr-ec/%D0%A5%D0%B8%D0%BF%D0%B5%D1%80%D0%B1%D0%BE%D0%BB%D0%B8%D1%87%D0%BD%D0%B0_%D1%82%D1%80%D0%B8%D0%B3%D0%BE%D0%BD%D0%BE%D0%BC%D0%B5%D1%82%D1%80%D0%B8%D1%98%D0%B0
-
8/19/2019 Complex Rotations / Комплексне ротације
10/20
Р. Вуковић: Комплексне ротациjе
Исти угао α у радиjанима се може дефинисати и као половина
површине µ(KOC )шрафираног кружног исечка, jер централни
исечак KOC има површину µ = 1
2r2⋅2α =
α. Аналогно, на слици десно, уместно jединичне кружнице
x2 + y2 = 1 приказана
jе jедна грана jединичне хиперболе x2 − y2 =
1 и шрафирани сектор KOC
jеднакеповршине µ = α, коjом се дефинишу
хиперболне функциjе sh α = B C , ch
α = OB иth α = AB.
Свака формула „обичне” тригонометриjе може се трансформисати у
одоговараjућуформулу хиперболне тригонометриjе заменама:
sin z = −i sh z, cos z
= i ch z, tg z = −i th zsh z =
−i sin iz, ch z = i cos iz, th z
= −i tg iz,
(29)
где jе „угао” произвољан броj z ∈ C. Тако добиjамо
парове идентитета:
cosz + sin2 z = 1, cos2 z
= 1
(1 + tg2 z
), sin2 z = tg2 z
(1 + tg2 z
),
chz − sh2 z = 1, ch2 z = 1(1 −
th2z), sh2 z = th2z(1 − th2z), (30)или
адиционе формуле:
sh(x ± y) = sh x ch y ± ch x sh y,ch(x ± y)
= ch x ch y ± sh x sh y,th(x ± y) = (th x ±
th y)(1 ± th x th y), (31)
и многе друге одговараjуће формуле.Када координатне осе
Декартовог правоуглог система Oxy комплексне
равни
ротирамо око исходишта O за угао ω оне
постаjу осе система Ox′y′ као на слици 5.
Slika 5: Ротациjа око O за угао ω .
Тачка A(x, y) се ротира у тачку A′(x′, y′)
са координатама:x′ = x cos ω − y sin ω, y′ = x sin
ω + y cos ω, (32)
писаним у систему Oxy. Наиме, из jеднакости дужина
Ox′ = Ox, Oy ′ = Oy и сличнихправоуглих
троуглова на слици 5 видимо:
x2 = x cos ω, x2 − x1 = y sin
ω,
Гимназиjа Бања Лука 10
-
8/19/2019 Complex Rotations / Комплексне ротације
11/20
Р. Вуковић: Комплексне ротациjе
y2 = x sin ω, y1 − y2 = y cos
ω,
x1 = x cos ω − y sin ω, y1 = x sin ω + y
cos ω,
а отуда (32). Исто можемо добити и на други начин.Према
теореми 2.1, ротациjа (32) тачке A(x, y) око
исходишта за угао ω у тачку
A′ представља множење комплексног броjа z
= x+iy jединичним комплексним броjемcis(ω), дефинисаног
формулом (25). Отуда, редом:
z cis(ω) = z′,(x + iy)(cos ω + i sin ω)
= x′ + iy′,(x cos ω − y sin ω) + i(x sin ω + y cos ω)
= x′ + iy′,
па упоређивањем реалих и имагинарних делова добиjамо (32).
Дакле, ротациjа око исходишта еквивалентна jе множењу jединичним
комплекснимброjем. Слична врста ротациjе примењена jе у књизи
[3], стр. 11. за извођењеЛоренцових трансформациjа Аjнштаjнове
специjалне теориjе релативности.
Посматраjмо ротациjу у равни Oxτ , где
jе τ = ict, протекло време jе t,
а c ≈ 3 ⋅108
m/s jе брзина светлости у вакууму. Ако jе ω угао
ротациjе, онда jе веза измеђустарих и нових координата одређена
формулама (32). Координатни систем K сеу односу
на систем референце K ′ креће брзином v
дуж апсцисе x. При томе серелативистичким трансформациjама
подвргаваjу само координате x и τ , а не
осеокомите на x, ордината y и апликата
z. Остаjе да одредимо угао ω коjи можезависити само
од релативне брзине v .
Посматраjмо у систему K ′ кретање почетка
координатног система K . Тада jе
x = 0 и формуле (32) добиjаjу облик:
x′ = −τ sin ω, τ ′ = τ cos
ω,
што дељењем прве другом даjе:x′
τ ′= − tg ω.
Међутим, због τ ′ = ict′ и брзине v
= x′
t′ система K у односу на K ′,
добиjамо:
tg ω = iv
c.
Отуда:sin ω =
ivc
1 − v2
c2
, cos ω =1
1 − v2
c2
.
Заменом у (32) добиjамо:
x′ =x − iv
cτ ′
1 − v2
c2
, y′ = y, z′ = z, τ ′ =τ + iv
cx
1 − v2
c2
.
Гимназиjа Бања Лука 11
-
8/19/2019 Complex Rotations / Комплексне ротације
12/20
Р. Вуковић: Комплексне ротациjе
Смењуjући τ ′ = ict′ и τ
= ict налазимо дефинитивно:
x′ =x + vt
1 − v2
c2
, y′ = y, z′ = z, t′ =t + v
c2x
1 − v2
c2
. (33)
То су познате Лоренцове трансформациjе специjалне теориjе
релативности.Обратне формуле, коjе изражаваjу x,y,
z,t помоћу x′, y′, z′, t′ наjjедноставниjе се
добиjаjу заменом v са −v, jер се систем
K ′ у односу на K креће брзином
−v:
x =x′ + vt′
1 − v2
c2
, y = y′, z = z′, t =t′ +
v
c2x′
1 − v2
c2
. (34)
Исте се формуле могу добити непосредно решавањем (33) по
x,y, z,t.Са друге стране, ако у (33) ставимо v
c = thψ и −iτ = ct
= w, добићемо:
x′ = x−
iτ th ψ 1 − th2ψ , −iτ ′ =−
iτ +
x th ψ 1 − th2ψ ,x′ = x ch ψ + ct sh ψ, ct′ = ct
ch ψ + x sh ψ,
x′ = x ch ψ + w sh ψ, w′ = x sh ψ + w ch ψ.
(35)
Ово су трансформациjе хиперболне ротациjе, дуалне са (32).За
разлику од „обичне” ротациjе, хиперболна мења jединицу дужине
координатних
оса. На пример, дужина у систему K нека jе
∆x = x2 − x1, при чему jе w2
= w1 = 0, jер меримо само дуж x-осе.
Одузимањем x′2 од x
′
1 налазимо ∆x′= ∆x ch ψ, односно:
∆x = ∆x′ 1 − th2ψ. (36)Референтни систем
jе K ′, што значи да ће дужина коjа би у референтном
системуизносила ∆x′, након хиперболне ротациjе за угао
ψ из референтног система изгледатикраће, односно тачно као
∆x у формули (36).
Исто jе са другом координатом w. Међутим, ако jе w
= ct где jе t протекло времеа c
константна брзина светлости, као што имамо у Лоренцовим
трансформациjама(33), онда ће краћи периоди времена за обављање
датог догађаjа значити утоликобрже протицање времена.
Треће, ако дозволимо померање по обе координате, добиjамо
трансформациjепроизвољних интервала:
∆x′ = ∆x ch ψ + ∆w sh ψ, ∆w′ = ∆x sh ψ + ∆w ch
ψ,
коjи након квадрирања, одузимања и сређивања даjу:
(∆x′)2 − (∆w′)2 = (∆x)2 − (∆w)2 = const.
(37)Што значи да у хиперболном простору разлика квадрата координата
остаjе константна,док у „обичном” простору остаjе константан збир
таквих квадрата (Питагоринатеорема), што jе лако проверити са
(32).
Гимназиjа Бања Лука 12
-
8/19/2019 Complex Rotations / Комплексне ротације
13/20
Р. Вуковић: Комплексне ротациjе
4 Димензиjе
Димензиjе простора и времена узимамо здраво за готово. Има их
три просторне и
jедна временска и тачка. Међутим, математика се
димензиjама бави мало озбиљниjе,а од недавно и физика. Пре свега,
броj димензиjа jе броj координатних оса потребнихда се дефинише
место и време догађаjа.
Са становишта биологиjе, броj димензиjа света у коjем живимо jе
четири: трипросторне (дужина, ширина, висина) и четврта временска
(траjање). Када би ихбило више, еволуциjа живота на Земљи би
вероватно учинила да их „видимо”, jерби предатор коjи би овладао
вишим димензиjама био у значаjноj предности наддругим врстама, па
би и те друге врсте лакше опстаjале ако би му могле
парирати.Међутим, таквог нема.
Дакле, за „нормалан” живи свет нема четврте димензиjе простора,
нити другедимензиjе времена. Међутим, „нормални” нису мањи од
атома, не могу да изађу у
орбиту Земље, не трче брже од 120 km/h, и зато се математика не
може превишеослањати на њихов суд.
Према Урисону8, броj димензиjа jедне или коначног скупа тачака
jе нула. Линиjакоjа се може делити са наjвише коначно много тачака
има jедну димензиjу. Површинакоjа се може делити на области са
наjвише коначно много линиjа има две димензиjе.Простор коjи можемо
раздваjати (нпр. унутар и изван сфере) помоћу коначно многоповршина
има три димензиjе. Тренутак у времену одваjа наше траjање на
прошлости будућност, па простор-време има четири димензиjе. На
такав индуктиван начинби, иначе веома апстрактна топологиjа могла
дефинисати броj димензиjа такође иовог простор-времена у коjем ми
живимо.
Доследно Урисоновоj дефинициjи, поставља се питање одваjања
догађаjа по
различитим правцима. Рецимо, да ли jе могуће направити такав
3-дим обjекат однеког физичког материjала коjи би предмет из своjе
унутрашњости траjно одваjаоод спољашњости? Знамо да то ниjе могуће,
jер jе све што људи праве подложнопропадању. Та немогућност
одваjања доводи у несклад „нормално” опажање ипоменуту дефинициjу
димензиjе. Са друге стране, оно jе у сукобу са детерминизмом.
Приметимо да неопходност употребе вероватноће не гарантуjе
стварну случаjностдогађаjа. Када бацимо фер новчић ми не можемо
гарантовати да jе писмо или главапало стварно случаjно, jер се то
могло десити и због неког дубљег плана, наманедокучивог. Слично,
када по први пут откривамо децимале броjа π = 3,
14159 . . . ,оне нам се могу чинити случаjним броjевима. И заиста,
тестовима случаjностиматематичке теориjе вероватноће доказаћемо да
су то баш случаjни броjеви, али
опет, када их откривамо следећи пут, илузиjа њихове слободе
нестаjе. Такође,Хаjзенбергове релациjе неодређености познате нам из
квантне механике, не доказуjумогућност слободе догађања у
микро-свету физике, нити праве потребу за додатнимдимензиjама
простор-времена.
Друга примена исте Урисонове дефинициjе. Теориjа релативности
нам jе открилада „сада” за нас у jедном координатном систему ниjе
исто „сада” за неког у другом
8Ова тумачење и назив потичу из периода моjих студиjа у
Београду, око 1980.
Гимназиjа Бања Лука 13
-
8/19/2019 Complex Rotations / Комплексне ротације
14/20
Р. Вуковић: Комплексне ротациjе
систему. У свом првом раду, у тзв. Специjалноj теориjи из 1905.
Аjнштаj jе обjасниода у различитим инерциjалним системима у коjима
садашњост ниjе истовремена,
jесте могућа засебна (сопствена) синхронизациjа сатова.
Другим речима, сваки
инерциjални систем има сопствену садашњост коjа (потпуно)
раздваjа прошлостод будућности (читавог) универзума. Према
Урисоновоj дефинициjи, то значи дапростор-времену инерциjалних
система не треба више од 4 димензиjе.
Међутим, систем коjи ротира ниjе такав. Системима коjи ротираjу
бавио се исам Аjнштаjн, да би их до 1916. искључио из „правих”
система, када jе обjавиосвоjу тзв. Општу теориjу релативности.
Физичар може експериментом установитида се налази у систему коjи
ротира, рецимо због Кориолисових9 сила, за разликуод инерциjалног
када то не може. Унутар лифта коjи jеднолико убрзава
физичкимекспериментима ниjе могуће разликовати механичко убрзање од
гравитационог.
Иако нису инерциjални, нити су гравитациони у Аjнштаjновом
смислу, системимогу ротирати, а у таквима ниjе могућа
синхронизациjа сатова. Наиме, на начин
добиjања (36), познато jе да инерциjални систем, у jедноликом
праволиниjскомкретању, има успорен ток времена и скраћену jединицу
дужине по правцу кретања, уодносу на референтни систем (у
релативном мировању). Када су интервали временаи дужине по правцу
кретања инфинитезималне (или скоро занемарљиво мале),тада се може
рачунати са тим дилатациjама времена и контракциjама дужина
поубрзањима на произвољним кривим линиjама, укључуjући кружно
центрифугално.
Након обиласка по кружници коjа ротира, због спориjег протицања
времена уодносу на тачку у исходишту, поjавила би се разлика у
времену. Због те разлике ниjемогућа синхронизациjа сатова дуж било
коjе такве кружнице, а због немогућностисинхронизациjе сатова
систем коjи ротира нема jединствено „сада”. То значи да усистему
коjи ротира не постоjи 3-дим граница (jедан тренутак у коjем jе сав
тро-
димензионални простор) коjа би раздвоjила његову прошлост од
будућности.Према Урисоновоj дефинициjи димензиjе, то значи да
систем коjи ротира не
може стати у само 4 димензиjе. Са друге стране, Аjнштаjнова
теориjа релативности jе на њих ограничена (на 4-дим
простор-време).
У прилогу [4] у 3. примеру, примењена jе метода Лоренцових
трансформациjа накриве линиjе (у инфинитезималноj области). Лако jе
проверити да се резултат слажеса Шварцшилдовом метриком10,
коjа описуjе централно симетрична гравитационапоља (приближно
околини Сунца, Земље, и сл.), а на коjу се могу свести и
осталарешења jедначина опште теориjе релативности. Међутим, исти
метод дозвољава иметрику попут:
ds
2=
dr
2+
r2dΩ2
1 − rru−
1−
r
ru c2
dt
2
, (38)
gde je r удаљеност од исходишта, ru полупречник
универзума, а dΩ jе инфинитезималниелеменат сферних
координата. За разлику од гравитационог привлачења, ова
метрикадефинише одбоjну силу са убрзањем коjе расте са удаљеношћу
r .
9в. Кориолисов ефекат:
https://sr.wikipedia.org/wiki/%D0%9A%D0%BE%D1%80%D0%B8%D0%BE%D0%BB%D0%B8%D1%81%D0%BE%D0%B2_%D0%B5%D1%84%D0%B5%D0%BA%D0%B0%D1%82
10Schwarzschild metric:
https://en.wikipedia.org/wiki/Schwarzschild_metric
Гимназиjа Бања Лука 14
https://sr.wikipedia.org/wiki/%D0%9A%D0%BE%D1%80%D0%B8%D0%BE%D0%BB%D0%B8%D1%81%D0%BE%D0%B2_%D0%B5%D1%84%D0%B5%D0%BA%D0%B0%D1%82https://sr.wikipedia.org/wiki/%D0%9A%D0%BE%D1%80%D0%B8%D0%BE%D0%BB%D0%B8%D1%81%D0%BE%D0%B2_%D0%B5%D1%84%D0%B5%D0%BA%D0%B0%D1%82https://en.wikipedia.org/wiki/Schwarzschild_metrichttps://en.wikipedia.org/wiki/Schwarzschild_metrichttps://sr.wikipedia.org/wiki/%D0%9A%D0%BE%D1%80%D0%B8%D0%BE%D0%BB%D0%B8%D1%81%D0%BE%D0%B2_%D0%B5%D1%84%D0%B5%D0%BA%D0%B0%D1%82https://sr.wikipedia.org/wiki/%D0%9A%D0%BE%D1%80%D0%B8%D0%BE%D0%BB%D0%B8%D1%81%D0%BE%D0%B2_%D0%B5%D1%84%D0%B5%D0%BA%D0%B0%D1%82
-
8/19/2019 Complex Rotations / Комплексне ротације
15/20
Р. Вуковић: Комплексне ротациjе
Основна идеjа jе следећа. Мада jе карактер гравитационог поља
тензорски,сила jе у сваком његовом инфинитезималном (веома малом)
делу вектор. Правацтог вектора дефинише jедну, просторну осу
Лоренцових трансформациjа, коjоj jош
додамо време. У тоj псеудо равни простор-времена, угао ротациjе
расте са силом имења се од тачке до тачке простора.
У истом прилогу jе показано да се резултати попут (38), уосталом
као и Лоренцоветрансформациjе, могу добити ротациjом у
(инфинитезималноj) псеудо равни, причему се под ротациjом
подразумева произвољна изометриjска трансформациjа сафиксном
тачком, исходиштем O. Не поjављуjе се експлицитно угао
ротациjе, већсе доказуjе да произвољан (мали) троугао пресликавањем
прелази у троугао истеповршине, а отуда закључак да jе то
ротациjа.
Из геометриjе знамо да jе централна симетриjа ρo
∶ A →A′ ротациjа око тачке O
за испружен угао (180○ или у радиjанима π). Свака
транслациjа се може добити каокомпозициjа две централне симетриjе,
као на слици 6. Наиме, дуж O1O2 jе средња
линиjа сваког од троуглова AA1A2 и B B1B2.
Slika 6: Централне симетриjе ρ1 ∶ AB →A1B1
и ρ2 ∶ A1B1 →A2B2.
Знамо да рефлексиjе мењаjу орjентациjу фигуре. Осна симетриjа ће
троугаочиjа темена редом A,B, C иду у позитивном
смеру (обрнуто смеру казаљке на сату)пресликати у троугао чиjа
одговараjућа темена иду у негативном смеру. Отудазакључак да се
осна симетриjа у истоj равни не може свести на низ „премештања”коjа
не мењаjу орjентациjу фигуре. Међутим, ако троугао ротирамо око осе
симетриjеза пун угао, добићемо управо његову осно-симетричну слику.
Тада фигура напушта2-дим раван и поново се враћа у њу.
Слично jе са рефлексиjом у три димензиjе. Када станемо испред
огледала
видимо у одразу замењену леву и десну страну. То се никако не би
могло добитиходањем по соби и „одласком” иза огледала, већ само
изласком у нову димензиjу,ротациjом око равни огледала и враћањем у
позициjу нашег одраза. Тако ротирани,ми би се себи и даље чинили
непромењени, али би сав остали свет изгледао као да
jе заменио леву и десну страну.То нас враћа на немогућност
„нормалних” људи да користе додатне димензиjе,
али и оправдава назив ротациjа за резултат попут (38).
Гимназиjа Бања Лука 15
-
8/19/2019 Complex Rotations / Комплексне ротације
16/20
Р. Вуковић: Комплексне ротациjе
5 Кватерниони
Пођимо опет од трансформациjа (32), коjе сада пишемо
матрично:
x1y1 = cos ω − sin ω
sin ω cos ω x
y , (39)
односно ẑ1 = êẑ. Приметимо да jе:
x1y1 = cos ω 1 0
0 1x
y + sin ω 0 −1
1 0 x
y ,
ẑ1 = Î ̂u + îv̂,
где jе Î jединична матрица другог реда, а
матрица î такође реда 2 × 2, потсећа
наимагинарну jединицу:
î2 = 0 −11 0 0 −1
1 0 = − 1 0
0 1 = −Î .
Матрице колоне û = ẑ cos ω и
v̂ = ẑ sin ω нас потсећаjу на реални и
имагинарни деокомплексног броjа ẑ. То можемо допунити
остатком основних 2 × 2 матрица:
Î = 1 00 1 , î = 0
−1
1 0 , ˆ j = 0 i
i 0 , k̂ = −i 0
0 i . (40)
Ово су четири базне матрице 4-дим простора
кватерниона.Коњуговано комплексни броjеви z = x
+ iy и z̄ = x − iy множе се у
zz̄ = x2 + y2.
Слично, коњуговане матрице су:
ẑ = x −yy x , ẑ∗
= x y
−y x , (41)
са особином:
ẑẑ∗ = x2 + y2 00 x2 + y2 = (x2 + y2)Î
. (42)
Доследно, дефинишемо и сложени збир (10) за комплексне
матрице:
ẑ1 ⊕ ẑ2 =1
2
(ẑ1ẑ
∗
2 + ẑ∗
1 ẑ2
) =
=
1
2 x1 −y1
y1 x1 x2 y2
−y2 x2 + x1 y1
−y1 x1x2 −y2
y2 x2
=
1
2 x1x2 + y1y2 x1y2 − y1x2
y1x2 − x1y2 y1y2 + x1x2 + x1x2 +
y1y2 −x1y2 + y1x2
−y1x2 + x1y2 y1y2 + x1x2
=
1
2 2(x1x2 + y1y2) 0
0 2(x1x2 + y1y2) = (x1x2 + y1y2)1 00 1
.Гимназиjа Бања Лука 16
-
8/19/2019 Complex Rotations / Комплексне ротације
17/20
Р. Вуковић: Комплексне ротациjе
Па jе:ẑ1 ⊕ ẑ2 = (x1x2 +
y1y2)Î = ẑ1 ⋅ ẑ2, (43)
и имамо аналогиjу са скаларним производом z1 ⋅
z2 =
x1
x2 +
y1
y2
.Аналогиjа квадрату модула z2 = zz̄ jе
детерминанта:det(ẑ) = det x −y
y x = x −y
y x = x2 + y2, (44)
као и det(ẑ∗) или det(ẑẑ∗). За ове матрице
важи:ẑ1ẑ2 = ρ1ρ2 cos φ1 − sin φ1
sin φ1 cos φ1cos φ2 − sin φ2
sin φ2 cos φ2 ,
ẑ1ẑ2 =
ρ1ρ2 cos
(φ1 + φ2
) − sin
(φ1 + φ2
)sin(φ1 + φ2) cos(φ1 + φ2) ,
(45)што jе аналогиjа теореми 2.1. Такође можемо
писати:
ẑ1 ⋅ ẑ2 =
det(ẑ1) det(ẑ2) cos θ Î , (46)али угао
θ сада нема исти смисао.
Директним матричним множењем проверавамо да за (40) важе
jеднакости:
î2 = ̂j2 = k̂2 = −Î , îˆ j
= −ˆ jî = k̂, ˆ jk̂
= −k̂ˆ j = î, k̂î =
−îk̂ = ̂j.
У циклично формираном низу î, ̂j, k̂,
î, ̂j множење узастопних бирањем у десно
даjеследећу матрицу са позитивним предзнаком, а у лево негативним.
Збир (i =
√ −1):
q̂ = wÎ + xî + yˆ j +
zk̂ = w − iz −x + iyx + iy w + iz ,
(47)
називамо кватернион , са комлексним коефициjентима ако
w,x,y, z ∈ C.Лако jе показати да важи:
q̂ = 0 00 0 = 0̂ ⇐⇒ w
= x = y = z = 0,
(48)
што значи да jе простор кватерниона 4-димензионалан. Наиме,
линеарна комбинациjа(41) базних елемената (40) jеднака jе нули ако
и само ако су сви коефициjенти
кватерниона нуле. То значи да су базни елементи (вектори)
линеарно независни.Међутим, ако су коефициjенти кватерниона „само”
реални броjеви онда четириелемента (вектора) базе (40) нису
довољна, па jе простор више него 4-дим.
Да jе у случаjу кватерниона са комплексним елементима база (40)
комплетна,тj. да q̂ може представљати произвољну
матрицу, доказуjемо у следећем примеру.
Пример 5.1. Доказати да четири базне матрице (40) чине
комплетан простор кватерниона са комплексним
коефициjентима.
Гимназиjа Бања Лука 17
-
8/19/2019 Complex Rotations / Комплексне ротације
18/20
Р. Вуковић: Комплексне ротациjе
Доказ. За произвољну матрицу M̂ ,
решавамо jедначину M̂ = q̂ , то
jест:
M̂ =
a b
c d =
w − iz −x + iy
x + iy w + iz = q̂,
w − iz = a,
−x + iy = b,
x + iy = c,
w + iz = d,
⇐⇒
w = (a + d)2,x = (c − b)2,y =
−i(c + b)2,z = i(a − d)2.
(49)
Према томе, постоjи биjекциjа између M̂ и
q̂ .
Следећи резултат jе, благо речено, ретко познат у математици.
Дата су двакватерниона:
ẑ = z0Î + z1î + z2ˆ j
+ z3k̂,
ŵ = w0Î + w1î + w2ˆ j +
w3k̂, (50)
са комплексним коефициjентима. Тада jе:
ẑ ŵ∗ =3
β=0
zβ w̄β Î −3
α=1
(z0 w̄α − zα w̄0)êα −
ê1 ê2 ê3z1 z2 z3w̄1 w̄2
w̄3
, (51)
где jе ради лакшег писања стављено ê0 =
Î , ê1 = î, ê2
= ̂j и ê3 = k̂. Отуда:
ẑ∗ŵ =3
β=0
z̄βwβ Î +3
α=1(
z̄0wα − z̄αw0
)êα −
ê1 ê2 ê3z̄1 z̄2 z̄3w1 w2
w3
, (52)
па jе:
ẑ ⊕ ŵ =3
β=0
R(zβ w̄β)Î − i 3α=1
I(zα w̄0 − z0 w̄α)êα − 12( D̂1
+ D̂2), (53)
ẑ ⊖ ŵ = −i3
β=0
I(zβ w̄β)Î + 3α=1
R(zα w̄0 − z0 w̄α)êα − 12( D̂1
− D̂2), (54)
где jе ради краћег писања стављено за детерминанте:
D̂1 = ê1 ê2 ê3z1 z2 z3w̄1
w̄2 w̄3
, D̂2 = ê1 ê2 ê3z̄1 z̄2
z̄3w1 w2 w3
,
а ẑ ⊕ ŵ = 12(ẑ ŵ∗
+ ẑ∗ŵ) и ẑ ⊖ ŵ =
1
2(ẑ ŵ∗ − ẑ∗ŵ) су сложени збир и разлика.
Више о
овоме у прилогу [1].
Гимназиjа Бања Лука 18
-
8/19/2019 Complex Rotations / Комплексне ротације
19/20
Р. Вуковић: Комплексне ротациjе
6 Паулиjеве матрице
Базне матрице кватерниона имаjу особину ê2 =
−Î . Сменом ê = ib̂ или
b̂ = −iê,
добиjамо матрице:
b̂0 = 1 00 1 , b̂1 = 0
i
−i 0 , b̂2 = 0 1
1 0 , b̂3 = 1 0
0 −1 , (55)
са особином b̂2 = Î коjе се називаjу
Паулиjеве. Заправо, Паулиjеве матрице су σ̂x = b̂2,σ̂y
= −b̂1 и σ̂z = b̂3, дакле веома
сличне овим, али са ове позициjе гледаjући, несретноизабране. То су
важне матрице квантне механике.
Слично кватернионима (47), линеарна комбинациjу Паулиjевих
матрица jе:
ˆ p = p0Î + p1b̂1
+ p2b̂2 + p3b̂3 =
p0 + p3 p2 + ip1 p2
− ip1 p0 − p3
. (56)
Слично (40), може се показати да и матрице (55) чине комплетан
скуп базнихвектора 4-дим простора, али само ако су коефициjенти
(56) комплексни броjеви.
Пример 6.1. Доказати да матрице (55) чине комплетан
скуп.
Доказ. Показаћемо да за произвољну 2
×2 матрицу M̂ постоjе коефициjенти pβ
∈ C,
β = 0, 1, 2, 3, такви да за ˆ p
= p0b̂0 + p1b̂1 + p2b̂2
+ p3b̂3 важи jеднакост M̂ =
ˆ p:
M̂ = a bc d = p0
+ p3 p2 + ip1
p2 − ip1 p0 − p3 =
ˆ p,
p0 + p3 = a, p2 + ip1
= b,
p2 − ip1 = c,
p0 − p3 = d,
⇐⇒
p0 = (a + d)2, p1 = −i(b −
c)2, p2 = (b + c)2, p3 = (a −
d)2.
(57)
Отуда, постоjи биjекциjа између M̂ и
ˆ p.
Међутим, врста ове биjекциjе сада, због начина примене ових
матрица у физици,води на неке занимљиве закључке у вези са
димензиjама физичког простора. Пресвега потсетимо се да овакве
матрице представљаjу стања физичког система у квантноjмеханици.
Сопствени вектори тих матрица и сопствене вредности тих
векторапредстављаjу вариjабле и обзервабле.
Вектор v jе сопствени вектор матрице
M̂ ако постоjи скалар λ такав да
jе:M̂ v = λv. (58)
Скалар λ називамо сопствена вредност
вектора v. Сопствени вектори Паулиjевематрице b̂3
су:
α3 = 10 , β 3 = 0
1 , (59)
Гимназиjа Бања Лука 19
-
8/19/2019 Complex Rotations / Комплексне ротације
20/20
Р. Вуковић: Комплексне ротациjе
на начин:b̂3 α3 = α3, b̂3 β 3 =
− β 3. (60)
а називамо их „ спин горе” и „спин доле”. Решаваjући jедначину
(58) за остале двеПаулиjеве матрице, добиjамо сопствене
векторе:
α1 = 1−i , β 1 = 1i ,
α2 = 11 , β 2
= 1−1 , (61)
где jе b̂γ αγ = αγ и
b̂γ β γ =
−β γ за γ = 1, 2, 3.
Затим можемо формирати jединичневекторе и добити вектор
спина ψ уопште, као (26) у прилогу о
Феримионима [6].
У истом прилогу о Фермионима jе дат доказ да тек ротациjа за
2π = 360○ чинитрансформациjу ψ →
− ψ. Дакле да би се вектор спина вратио на почетни
смерпотребна су два пуна круга, од укупно 720○. То jесте
чудно, као и закључак коjићемо овде на краjу извести.
Видели смо да постоjи биjекциjа Паулиjевих матрица (56), као и
слична биjекциjакватерниона (49), са скупом свих матрица 2
× 2 са комплексним коефициjентима.Матрице са
комплексним коефициjентима су управо представници стања
квантнихсистема. Међутим, обзервабле (оно што меримо у физици) су
реални броjеви, на коjеако се ограничимо не важе поменуте
биjекциjе. То значи да реални простор (онаjу коjем меримо) има више
од 4 димензиjе, коjе „кокетираjу” са неким апстрактнимкомплексним
4-дим простором у коjем се налазе матрице квантних стања.
Другим речима, за свет микро-физике jе инерциjални 4-дим
простор-време превишетесан, мада jе сасвим довољан за макро-свет
Аjнштаjнове гравитациjе.
Literatura
[1] Rastko Vukovic: Complex Numbers , Geometry and
Alegebra of Quaternions, secondedition,
Academia.edu11, February 20, 2016.
[2] Rastko Vukovic: Triangle in Complex Plane ,
Academia.edu12, March 2, 2016.
[3] Л. Ландау и Е. Лифшиц: ТЕОРИJА ПОЉА, Научна књига,
Београд, 1952.
[4] Rastko Vukovic: Commutators of the
Coordinates and the Area, Academia.edu13,February 12, 2016.
[5] Rastko Vukovic: Relativity in complex rotation ,
Rotating of the space-time coordi-nates, Academia.edu14
[6] Rastko Vukovic: Fermions , Half-integer spin
particles, Academia.edu15, January 3,2015.
11Complex: www.academia.edu/2221673212Triangle:
www.academia.edu/s/12067e994f13Commutators:
www.academia.edu/21862433/14Relativity:
www.academia.edu/9694933/15Fermions:
www.academia.edu/9994343/
Гимназиjа Бања Лука 20
http://www.academia.edu/22216732http://www.academia.edu/s/12067e994fhttp://www.academia.edu/21862433/http://www.academia.edu/9694933/http://www.academia.edu/9994343/http://www.academia.edu/9994343/http://www.academia.edu/9694933/http://www.academia.edu/21862433/http://www.academia.edu/s/12067e994fhttp://www.academia.edu/22216732