Embed Size (px)
Citation preview

I SBAI- UNESP - Rio Claro/SP - Brasil
COMPONENTES DE UM PROTÓTIPO DE UM A.G.V.
PARA UM AMBIENTE DE MANUFATURA INTEGRADA
ORIDES MORANDIN JÚNIOR Departamento de Engenharia Mecânica Escola de Engenharia de são Carlos Universidade de São Paulo Av. Dr. Carlos Botelho, 1465 Fone: (0162) 726222 Ramal 3230 Caixa Postal 359 13560 São Carlos S.P.
RESUMO
Este artigo descreve os sub-sistemas componentes de um protótipo de um AGV (Veículo Auto-Guiado), projetado para trabalhar dentro de um ambiente de Manufatura Integrada por Computador. O AGV utiliza uma técnica de guia ótica, e possui duplo sistema diretor, o que permite movimento em dois sentidos. Um microcomputador de bordo é responsável pelo acionamento, controle e supervisão de todos os componentes do AGV, e também é responsável pela integração deste no sistema Flexível de Manufatura.
1. INTRODUÇÃO
A Manufatura Integrada por Computador (CIM) é obtida pela aplicação de sistemas Computacionais na automação do ciclo completo da Manufatura. O sistema total passa então a ser encarado como processo único, no qual um grande número de informações relativas a todas as atividades é rapidamente tratado. Neste tipo de automação, existem dois fatos notáveis: a flexibilidade, permitindo a fabricação eficiente de lotes pequenos, e a integração que permite · a interligação física, lógica e funcional dos equipamentos.
A nível do "chão de fábrica", isso é atingido através da utilização de máquinas ferramentas CNC, sistemas de transporte automáticos de peças e ferramentas e os robôs industriais, que são associados formando os sistemas Flexíveis de Manufatura (FMS) e dentro destes, as Células Flexíveis de Manufatura (FMC).
Dentro de uma FMC, e entre as FMC que formam o FMS, existe um alto fluxo de transporte, que deve ser atendido de forma
- 455-
I SBAI - UNESP - Rio Claro/SP - Brasil
automática e precisa, tanto em relação à posição quanto ao tempo. Este transporte automático é feito desde os armazéns de
peças e ferramentas, até os locais de trabalho das máquinas CNC por veículos auto-guiados (AGV - Automated Guided Vehicles). Nas proximidades das máquinas CNC, os robôs fazem a movimentação mais especializada.
Os A.G.V.'s transportam portanto, ferramentas e/ou "pallets" de peças desde os armazéns até os robôs e vice-versa, segundo trajetórias que devem ser otimizadas e programáveis. Isto implica em um certo grau de inteligência embarcada no A.G.V., capaz inclusive de se comunicar com o programa gerenciador do sistema Flexível de Manufatura.
Um A.G.V. é um avançado sistema de transporte de material, que .compreende um veículo "sem condutor", que segue uma guia, e é controlado por um microcomputador de transporte de material convencionais, como transportadores monotrilhos ou esteiras, um A.G.V. é capaz de selecionar sua própria rota ou curso para atingir seu destino. Ele tem basicamente a mesma liberdade de uma empilhadeira manual, mas não requer um operador. Através de seu computador de bordo, o veículo é hábil para receber informações ou comandos, como a identificação da carga, seu destino, e outras instruções especiais, que são fornecidos por um computador externo (controlador central) ou, em alguns casos, por entrada manual.
A.G.V.'s foram originalmente desenvolvidos para distribuição de materiais em depósitos. Entre suas áreas de aplicação, há duas de maior interesse: o transporte "de" e "para" áreas de produção numa fabricação, no lugar de empilhadeiras manuais; e no transporte em linhas de montagem, no lugar de transportadores tipo serial, assíncrono ou com índice fixado. Também são utilizados em escritórios para distribuir correspondências, mensagens e pequenos pacotes, assim como em hospitais.
Com o aumento de fabricação automática, os AGV's têm se tornado um método natural de transporte de material. Podem ser facilmente interfaceados com robôs, armazenagem automática e sistemas de recuperação (AS/RS), máquinas CNC, e outras formas modernas de automação controlada por computador. Um A.G.V. proporciona um sistema de transporte de material que é flexível e adaptável a uma alteração do produto ou produção, sendo desenvolvido para proporcionar uma rápida modificação ou expansão num tempo mínimo.
A integração de um sistema automático de transporte numa célula flexível de manufatura em conjunto com um sistema automático de armazenamento de peças proporciona aumento da produtividade, redução de inventário, eliminação de manuseio repetitivo e gerenciamento de materiais, redução de perdas por danificação e erros de localização.
2. DESCRIÇÃO
Este trabalho descreve os sub-sistemas componentes de um protótipo de um AGV (Veículo Auto-Guiado) (figura 1), projetado para trabalhar dentro de um ambiente de Manufatura Integrada por Computador. O AGV utiliza uma técnica de guia ótica, e possui
- 456-

I SBAI - UNESP - Rio Claro/SP - Brasil
duplo sistema diretor, o que permite movimento em dois sentidos. Um microcomputador de bordo é responsável pelo acionamento, controle e supervisão de todos os componentes do AGV, e também é responsável pela integração deste no FMS (figura 2).
VISTA LATERAL
,._._._._.- . • 1 1 • • 1 1 • • 1 1 • • 1 L ._._ ._. __ _
;---------'] 1 • • 1 ! i 1 • • 1 1 ___ _ __ -- -- -
" ------, ------',----., CABOS DE k
PARA-CHOQUES SENSORES CONTRA COUSAO DE COUSAO
I
/ /
/
I /,.../ ..... ,...
Fig.1 - AGV - Esboço
MI C R o GERENCIADOR
DA CELULA
INTERFACES
MULTI-SER I AL
E PARALELA
AGV
VISTA SUPERIOR
l........ PLATAFORMA
DE TRABALHO
MAGAZINE AUTOMATICO
R O B O CENTRO DE USINAGEM
Fig.2 - sistema Flexível de Manufatura sendo implantado
A configuração de condução do veículo é do tipo duplo triciclo, com dois sistemas de direção, permitindo dois sentidos de movimento, pois AGV's que andam em duas sentidos são muito mais flexíveis, sendo mais apropriados a ambientes de Manufatura Automatizada.
Na tração temos um motor de corrente contínua acoplado a uma roda; a alimentação é feita por baterias; e no controle de trajetória é utilizada a técnica de guia por reflexão de luz em pista demarcada no chão, o que inclui o uso de componentes optoeletrônicos.
Nos pontos de destin%rigem do material transportado há manipuladores específicos para efetuar a carga e descarga. E a comunicação é feita por rádio-frequência.
A figura 3 mostra um diagrama dos sub-sistemas componentes
- 457-
I SBAI - UNESP - Rio Claro/SP - Brasil
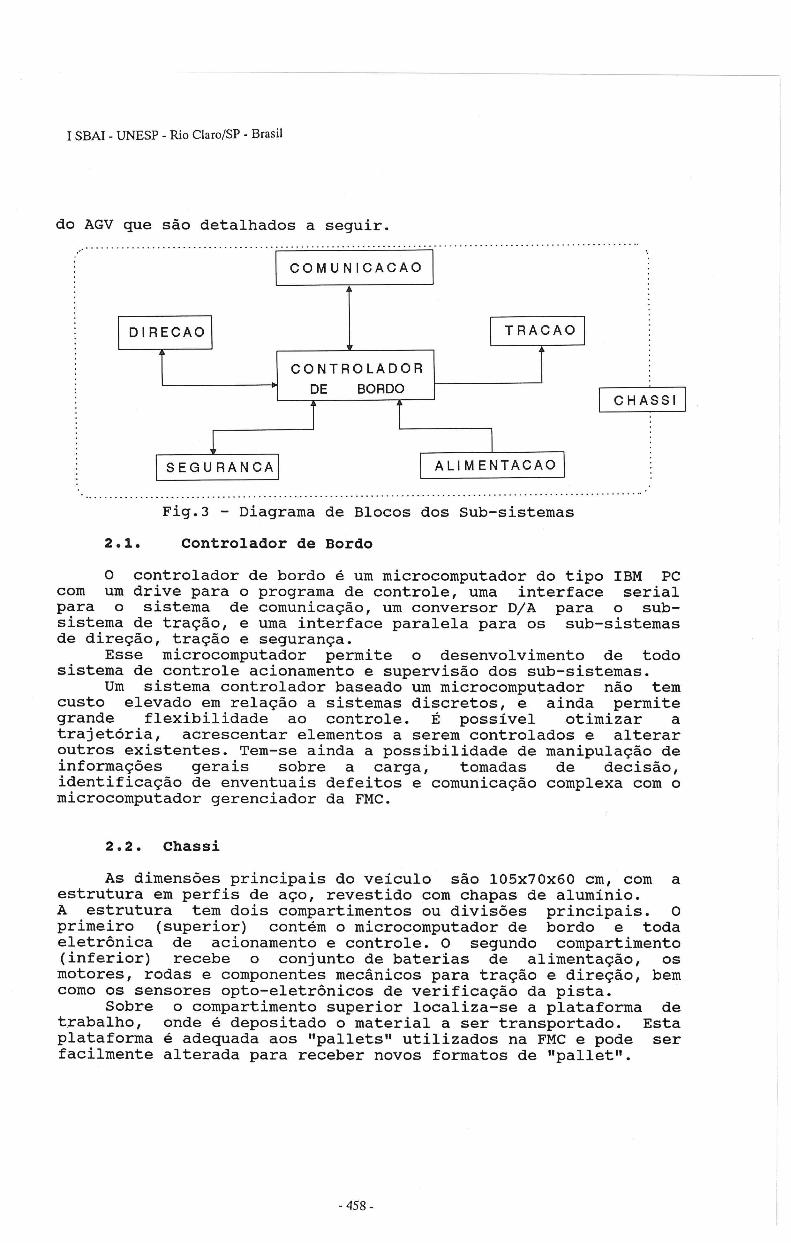
do AGV que são detalhados a seguir . ..... . ... ... ........ . .............. ... ..... .. .. .............................. .. . . ..... . ... . ... .. .... . ...... . ..
.. ' I COMUNICACAO I
I DIRECAOI I
TRACAO I J 1 CONTROLADOR
DE BORDO
r I CHASSI
1 I I SEGURANCAJ I ALIMENTACAO J
....... .. ... .. . . . .... . ..... ... . ...... . ... . ... . .. ...... . ..... . . ....... ..... .. . .. .. ... .. . ... . .... . ..... . .... .. ....
Fig.3 - Diagrama de Blocos dos Sub-sistemas
2.1. Controlador de Bordo
o controlador de bordo é um microcomputador do tipo IBM PC com um drive para o programa de controle, uma interface serial para o sistema de comunicação, um conversor D/A para o subsistema de tração, e uma interface paralela para os sub-sistemas de direção, tração e segurança.
Esse microcomputador permite o desenvolvimento de todo sistema de controle acionamento e supervisão dos sub-sistemas.
Um sistema controlador baseado um microcomputador não tem custo elevado em relação a sistemas discretos, e ainda permite grande flexibilidade ao controle. É possível otimizar a trajetória, acrescentar elementos a serem controlados e alterar outros existentes. Tem-se ainda a possibilidade de manipulação de informações gerais sobre a carga, tomadas de decisão, identificação de enventuais defeitos e comunicação complexa com o microcomputador gerenciador da FMC.
2.2. Chassi
As dimensões principais do veículo são l05x70x60 cm, com a estrutura em perfis de aço, revestido com chapas de alumínio. A estrutura tem dois compartimentos ou divisões principais. O primeiro (superior) contém o microcomputador de bordo e toda eletrônica de acionamento e controle. O segundo compartimento (inferior) recebe o conjunto de baterias de alimentação, os motores, rodas e componentes mecânicos para tração e direção, bem como os sensores opto-eletrônicos de verificação da pista.
Sobre o compartimento superior localiza-se a plataforma de trabalho, onde é depositado o material a ser transportado. Esta plataforma é adequada aos "pallets" utilizados na FMC e pode ser facilmente alterada para receber novos formatos de "pallet".
- 458-
I SBAI - UNESP - Rio Claro/SP - Brasil
2.3. Alimentação
utiliza baterias de linha automotiva, e não do tipo tracionária especial, por terem substituição e recarga mais facilmente realizados e custo inferior. Os motores de corrente contínua utilizados na tração e direção são de 24 V., portanto são utilizados dois conjuntos em paralelo de duas baterias em serie, a fim de obter uma fonte de 24 V com capacidade de fornecimento de corrente de 120 Amperes/Hora, garantindo uma autonomia de aproximadamente 5 horas de trabalho contínuo ao veículo.
2.4. comunicação
A comunicação entre controlador de bordo e o microcomputador gerenciador da célula é feita por rádio-frequência. utiliza portanto uma interface serial no padrão RS-232-C e dois conjuntos mOduladores/demoduladores de R.F., um sendo conectado à interface serial do controlad6r de bordo e o outro à interface serial do microcomputador gerenciador da célula. Cada um desses conjuntos é formado por um modem e por um transceptor na faixa de VHF.
Na comunicação são trocadas informações sobre origem, destino e tipo de carga, permissão para tráfego, parada de emergência (ocasionada por exemplo por colisão do AGV com algum obstáculo) e identificação de eventuais defeitos.
2.5. Tração
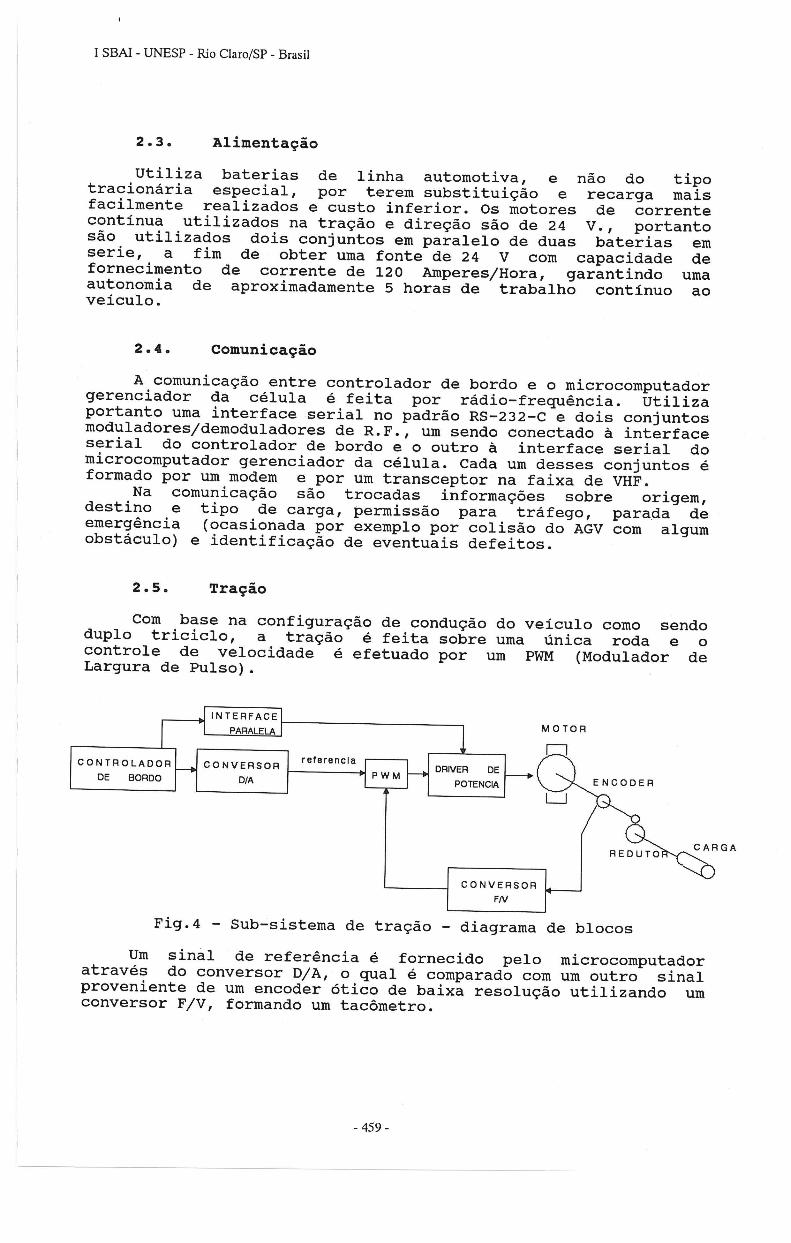
Com base na configuração de condução do veículo como sendo duplo triciclo, a tração é feita sobre uma única roda e o controle de velocidade é efetuado por um PWM (Modulador de Largura de Pulso).
~ __ ~INTERFACEr-__________________ -.
CONTROLADOR
DE BORDO
PARALELA
CONVERSOR
DIA
referencla DRIVER DE
POTENCIA
CONVERSOR
FN
MOTOR
Fig.4 - Sub-sistema de tração - diagrama de blocos
Um sinal de referência é fornecido pelo microcomputador através do conversor D/A, o qual é comparado com um outro sinal proveniente de um encoder ótico de baixa resolução utilizando um conversor F/V, formando um tacômetro.
- 459-

I SBAI - UNESP - Rio Claro/SP - Brasil
o motor de corrente contínua será acoplado à roda através de um redutor do tipo sem fim.
2.6. Direção
o controle de trajetória é composto por duas partes básicas: a unidade rastreadora e a unidade diretora. Esse sistema possui duas unidades diretoras para permitir o movimento do veículo em dois sentidos.
2.6.1. Unidade Rastreadora
Uma vez que a unidade rastreadora (figura 5) utiliza a técnica de reflexão de luz em pista demarcada no chão (figura 6), são utilizados componentes opto-eletrônicos ,que são chaves óticas compostas de umfoto-transístor e um diodo emissor de luz (figura 7-a) , que "verificam" a pista feita no chão. Esses componentes são dispostos vetorialmente (figura 7-b) na direção perpendicular ao movimento do AGV, permitindo a verificação da posição do veículo em relação à pista reflexiva demarcada, assim como os locais de parada, passando a informação ao controlador de bordo através de uma interface paralela.
CONTROLADOR INTERFACE DISPOSITIVO DE BORDO PARALELA RASTREADOR
--
Fig.5 - Unidade Rastreadora - Diagrama de blocos
-
-
INFORMACAO
DE DIRECAO
INFORMACAO
DE POSICAO
Fig.6 - Trecho da Pista Reflexiva
Fig.7-a - Elemento ótico -b - Vetor de Elementos
Há um unlCO dispositivo rastreador composto por elementos óticos para leitura da informação de direção e
- 460-
vinte quatro

I SBAI - UNESP - Rio Claro/SP - Brasil
outros elementos para leitura da informação de posição sendo constantemente avaliados pelo controlador de bordo para o controle nos dois sentidos de movimento.
Esse dispositivo está salientes, colocado no centro da parte inferior do veículo, com um grau de liberdade, apoiado sobre molas para permitir retração em função de pequenas irregularidades na pista e de modo a ficar bem próximo a ela.
2.6.2. Unidade Diretora
Cada urna das duas unidades diretoras (Fig. 8) é composta por um moto-redutor de corrente contínua acoplado a urna roda diretora, com um encoder ótico simples, para controle de posição.
CONTROLADOR
DE BORDO INTERFACE
PARALELA CONTROLADOR
DE POSICAO
MOTOR
DRIVER DE
POTENCIA ENCODER
Fig.8 - Unidade Diretora - Diagrama de Blocos
~RGA
A partir de urna informação de desvio de trajetória da unidade rastreadora, o controlador de bordo envia urna referência de posição ao circuito controlador do moto-redutor, através da interface paralela. Este circuito comanda o moto-redutor até atingir a posição adequada, sendo realimentado pelo encoder. Urna vez atingida a posição, informa ao controlador de bordo.
Há também, chaves opto-eletrônicas corno referência para inicializar o sistema e corno fim de curso, para garantir um limite de giro às rodas diretoras.
2.7. Unidade de Segurança
É constituida por fitas flexíveis de aço com chaves do tipo "fim de curso", que ao serem acionadas são reconhecidos pelo controlador de bordo, o qual executa a parada do AGV, e se necessário, informa o microcomputador gerenciador da célula. Também existem botões de emergência, luzes e um sinal sonoro, indicadores de veículo em movimento para garantir urna boa segurança ao sistema e ao usuário.
3. CONCLUSÃO
A implementação das técnicas utilizadas nesta concepção do veículo, permitiu sua construção com relativa facilidade, e
- 461 -
------------ - --

I SBAI - UNESP - Rio Claro/SP - Brasil
também a um baixo custo. Seu desempenho em relação à velocidade e posicionamento na parada, e ao longo da trajetória, foi bastante satisfatório, o que unido à comunicação do microcomputador de bordo com o restante da célula, possibilitou uma fácil integração deste sistema.
4 • REFERÊNCIAS
# Hollier, R. H., "AUTOMATED GUIDED VEHICLE SYSTEMS", International Trends in Manufacturing Technology, IFS (Publications) Ltd., 1987.
#Hollier, R. H., "AUTOMATED GUIDED VEHICLES", proceedings of an Executive Briefing, IFS (Publications) Ltd., 1986.
#Hammond, Gary, "AGVS AT WORK", IFS (Publications) Ltd., 1986.
#Muller, Dr-Ing Thomas, "AUTOMATED GUIDED VEHICLES", IFS (Publications) Ltd., 1983.
#Nichols, Elizabeth Agnew, "DATACOMMUNICATIONS FOR MICROCOMPUTERS", McGraw-Hill Book Company, 1982.
#Dorf, Richard C., "SISTEMAS AUTOMATICOS DE CONTROL", Fondo Educativo Ihteramericano S.A., 1978.
#Ogata, Katsuhiko, "ENGENHARIA DE CONTROLE MODERNO", Editora Prentice-Hall do Brasil Ltda., 1982.
#Taub, Herbert, "ELETRÔNICA DIGITAL", Editora McGraw-Hill do Brasil Ltda, 1982.
#Weedy, B. M., "ELECTRIC POWER SYSTEMS", John Wiley and Sons Ltd., 1987.
#Smeaton, Robert W., "SWITCHGEAR AND CONTROL HANDBOOK", McGraw-Hill Book Company, 1987.
#Franklin, Gene F., "DIGITAL CONTROL OF DYNAMIC SYSTEMS", Addison-Wesley Publishing CompanyInc., 1980.
#Kenjo, Takashi, "PERMANENT-MAGNET AND BRUSHLESS DC MOTORS", Oxforf University Press, 1985.
#Boylestad, Robert, "DISPOSITIVOS ELETRÕNICOS E TEORIA DE CIRCUITOS", Editora Prentice-Hall do Brasil Ltda., 1984.
- 462-