Embed Size (px)
Citation preview
27
CAPÍTULO 4
COMPORTAMIENTO MECÁNICO DE BIOPOLÍMEROS 4.1. Introducción
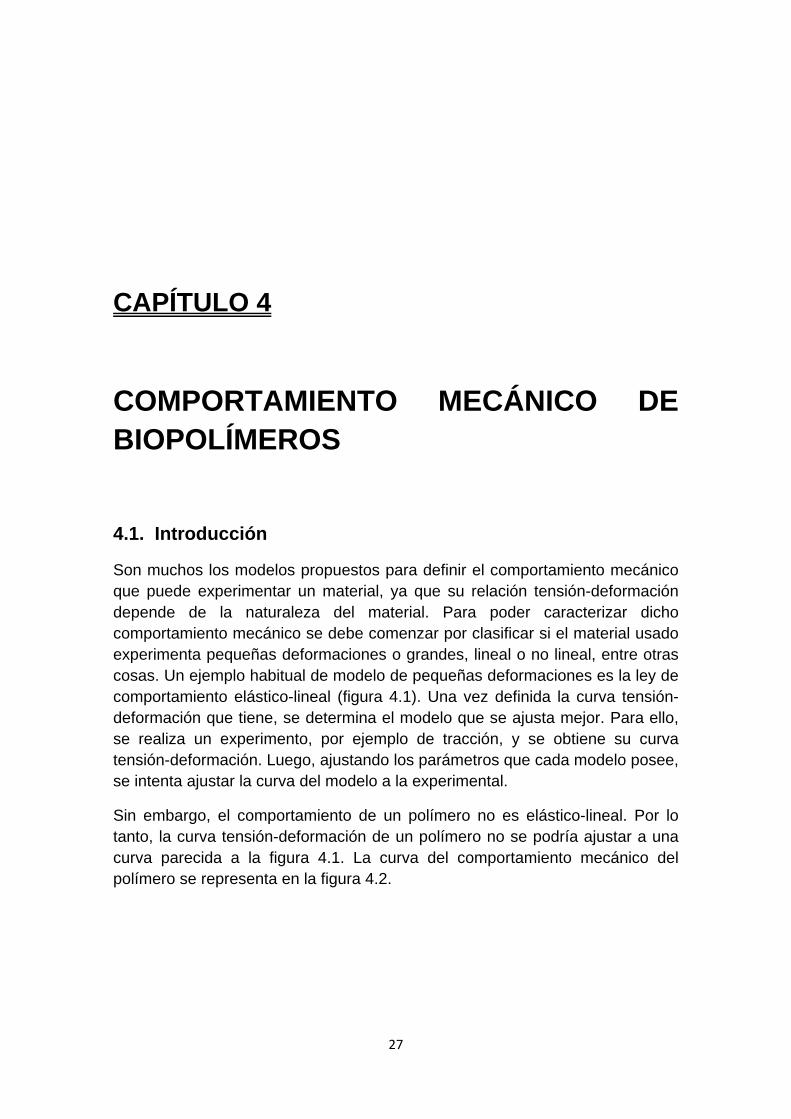
Son muchos los modelos propuestos para definir el comportamiento mecánico que puede experimentar un material, ya que su relación tensión-deformación depende de la naturaleza del material. Para poder caracterizar dicho comportamiento mecánico se debe comenzar por clasificar si el material usado experimenta pequeñas deformaciones o grandes, lineal o no lineal, entre otras cosas. Un ejemplo habitual de modelo de pequeñas deformaciones es la ley de comportamiento elástico-lineal (figura 4.1). Una vez definida la curva tensión-deformación que tiene, se determina el modelo que se ajusta mejor. Para ello, se realiza un experimento, por ejemplo de tracción, y se obtiene su curva tensión-deformación. Luego, ajustando los parámetros que cada modelo posee, se intenta ajustar la curva del modelo a la experimental.
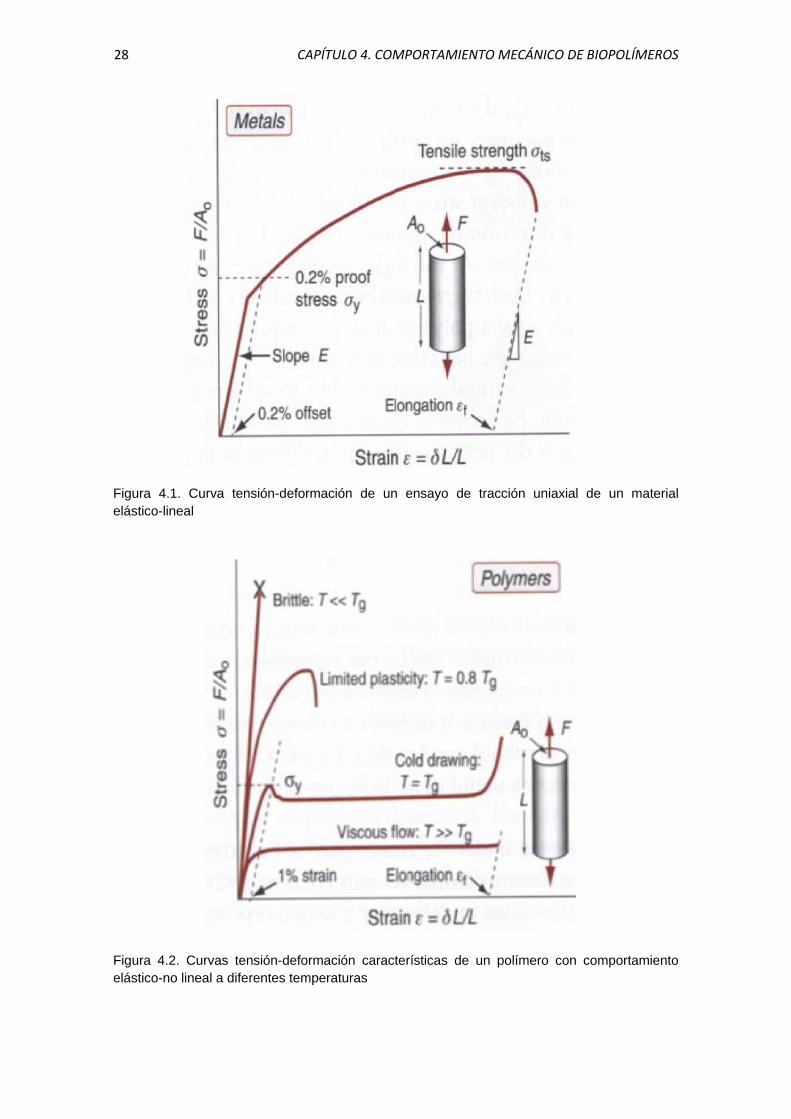
Sin embargo, el comportamiento de un polímero no es elástico-lineal. Por lo tanto, la curva tensión-deformación de un polímero no se podría ajustar a una curva parecida a la figura 4.1. La curva del comportamiento mecánico del polímero se representa en la figura 4.2.
28 CAPÍTULO 4. COMPORTAMIENTO MECÁNICO DE BIOPOLÍMEROS
Figura 4.1. Curva tensión-deformación de un ensayo de tracción uniaxial de un material elástico-lineal
Figura 4.2. Curvas tensión-deformación características de un polímero con comportamiento elástico-no lineal a diferentes temperaturas
29 CAPÍTULO 4. COMPORTAMIENTO MECÁNICO DE BIOPOLÍMEROS
Para caracterizar estas curvas de forma matemática se utilizan los modelos constitutivos. Se llama modelo constitutivo a una formulación matemática capaz de describir el funcionamiento físico macroscópico de un “sólido ideal” después de aplicarle ciertas simplificaciones. Por lo tanto, se puede considerar que un modelo constitutivo representa una realidad condicionada del comportamiento del material, que tiene que tenerse en cuenta a la hora de obtener conclusiones.
Como se ha dicho anteriormente existen diferencias entre los modelos, por lo tanto, se puede realizar una clasificación de los mismos. Ésta fue presentada en la American Society of Civil Engineers (ASCE).
• Modelos basados en la elasticidad lineal y no-lineal • Modelos de fractura • Modelos basados en la teoría de la plasticidad
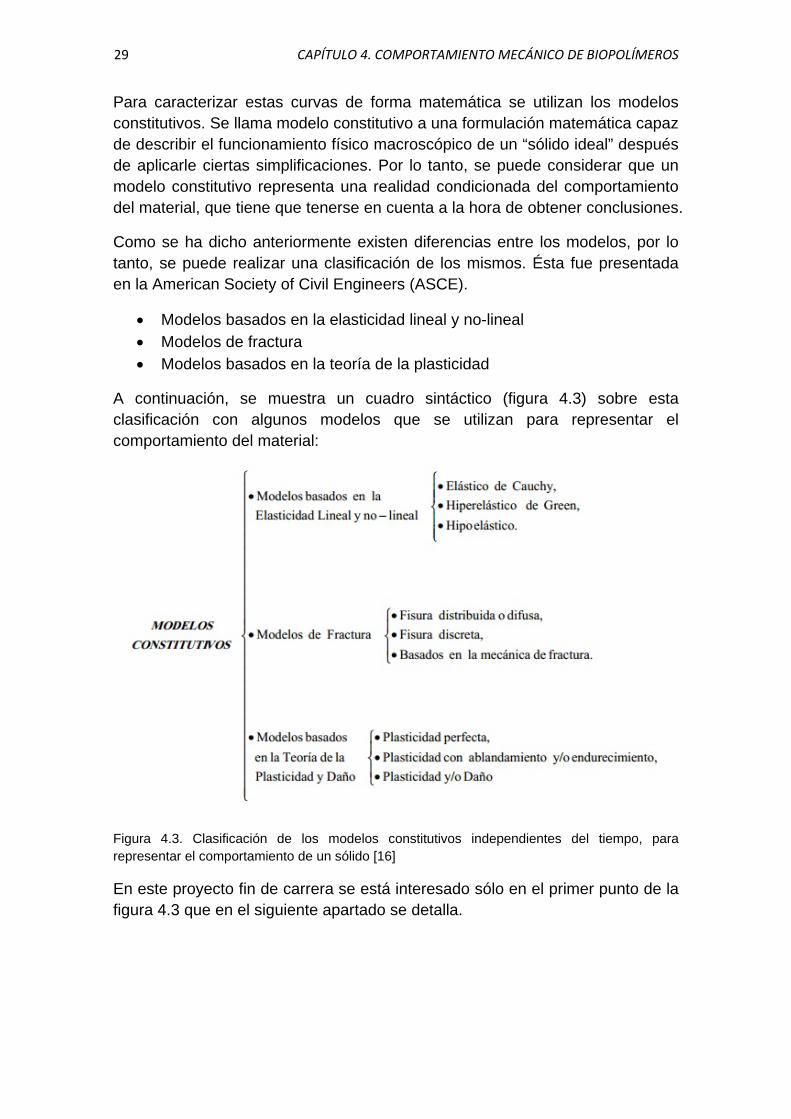
A continuación, se muestra un cuadro sintáctico (figura 4.3) sobre esta clasificación con algunos modelos que se utilizan para representar el comportamiento del material:
Figura 4.3. Clasificación de los modelos constitutivos independientes del tiempo, para representar el comportamiento de un sólido [16]
En este proyecto fin de carrera se está interesado sólo en el primer punto de la figura 4.3 que en el siguiente apartado se detalla.

30 CAPÍTULO 4. COMPORTAMIENTO MECÁNICO DE BIOPOLÍMEROS
4.2. Modelos constitutivos basados en la elasticidad
Son los modelos más simples, utilizados para representar materiales con comportamiento elástico, tanto lineal como no-lineal. Aquí se muestra una breve definición de estos modelos:
• Modelos elásticos de Cauchy [17]. Están basados en la Ley de Hooke. El campo tensional σ ij se define a partir del campo de deformaciones ϵ ij en un instante concreto mediante una función tensional del tipo σ ij = fij (ϵkl).
• Modelos hiperelásticos de Green [18]. En estos modelos la tensión σ ij se define a partir de un potencial que es función de ϵkl, la cual es la variable del problema, de la siguiente forma σ ij = ∂ω/∂ϵkl.
Estos modelos llevan asociadas unas ecuaciones constitutivas, que en el caso de los modelos clásicos están bien definidas:
• Modelo elástico de Cauchy, es el más clásico y utilizado, en elasticidad lineal.
𝜎𝑖𝑗 = 𝑓 (𝜖𝑘𝑙) (4.1)
𝜖𝑖𝑗 = 𝑓 −1(𝜎𝑘𝑙) (4.2)
Con esta formulación tanto la deformación como la tensión pueden ser la variable libre del problema, pero una vez definida una de ellas, la otra queda perfectamente establecida.
• Modelo elástico de Green, o también llamado hiperelástico. La variable del problema depende de una densidad de energía de deformación que debe ser preestablecida Ψ = Ψ (ϵ ij) o de su complemento Ψ� = Ψ� (σ ij).
𝜎𝑖𝑗 = 𝜕Ψ(𝜖𝑖𝑗)𝜕𝜖𝑖𝑗
(4.3)
𝜖𝑖𝑗 = 𝜕Ψ� (𝜎𝑖𝑗)𝜕𝜎𝑖𝑗
(4.4)
Ocurre lo mismo que en el modelo de Cauchy, tanto la deformación como la tensión pueden ser la variable libre del problema, pero una vez definida una de ellas, la otra queda perfectamente establecida. Este modelo contiene al anterior y es la forma más general de definir el comportamiento elástico de un sólido.
Esto es una forma general de formular los ilimitados modelos basados en la elasticidad lineal y no-lineal que existen. Este proyecto sólo se va a centrar en modelos hiperelásticos.

31 CAPÍTULO 4. COMPORTAMIENTO MECÁNICO DE BIOPOLÍMEROS
4.2.1. Modelos constitutivos hiperelásticos
Todos los modelos constitutivos hiperelásticos, también llamados modelos de Green, parten de una definición de la función de densidad de energía de deformación que dependerá de los invariantes de deformación (I1̅, I2̅, I3̅) y de unos parámetros característicos. Cada modelo tiene sus parámetros propios y no tiene porque depender de todos los invariantes. Los parámetros de los modelos suelen tener un significado físico, por lo que cada modelo es útil para un tipo determinado de material, no todos los modelos se ajustan correctamente al comportamiento de un material. Estos son unos ejemplos de modelos constitutivos con sus respectivas densidades de energía de deformación [19].
• Modelo Mooney-Rivlin. Este modelo puede ser utilizado tanto con elementos sólidos, como tipo placa de pared gruesa. En este modelo el número de parámetros es dos y su función de densidad de energía de deformación tiene la siguiente forma:
Ψ = C10(I1̅ − 3) + C01(I2̅ − 3) + 1D1
(Jel − 1)2 (4.5)
Donde W es la densidad de energía de deformación, C10 y C01 son constantes del material, D1 es la constante responsable de la compresibilidad del material. I1̅ y I2̅ son el primer y segundo invariante de deformación desviatorio definidos como:
I1̅ = λ�12 + λ�22 + λ�32 y I2̅ = λ�1(−2) + λ�1
(−2) + λ�1(−2) (4.6)
Donde las deformaciones desviadoras λ�i = J−13λi con λi igual a las
deformaciones principales; J es la relación de volumen total (determinante del tensor gradiente de deformación F, o lo que es lo mismo I3=J2); Jel es la relación de volumen elástico. El módulo de cizalladura inicial y el módulo de compresibilidad se definen como:
µ0 = 2(C10 + C01) y K0 = 2D1
(4.7)
• Modelo Neo-Hookeano. Este modelo se basa en la estadística de la termodinámica de los polímeros reticulados. Por lo tanto, se usa para predecir el comportamiento de plásticos y gomas. Su función de densidad de energía de deformación viene definida como:
Ψ = C10(I1̅ − 3) + 1D1
(Jel − 1)2 (4.8)
La definición de los parámetros y las variables es la misma que en el modelo de Mooney-Rivlin, excepto la de C10:
µ0 = 2C10 (4.9)
• Modelo Yeoh. Este modelo hiperelástico se usa para materiales casi incompresibles y con comportamiento no lineal como las gomas. A este modelo también se le llama modelo polinómico reducido y tiene la
32 CAPÍTULO 4. COMPORTAMIENTO MECÁNICO DE BIOPOLÍMEROS
siguiente expresión de la función de densidad de energía de deformación:
Ψ = ∑ Ci0(I1̅ − 3)ini=1 + ∑ Ck0(J − 3)2kn
k=1 (4.10) Donde I1̅ y J tienen la misma expresión que los modelos anteriores y Ci0 y Ck0 son constantes del material. C10 es la mitad del módulo de cizalladura inicial y C11 la mitad del módulo de compresibilidad. Cuando n=1 el modelo representa el comportamiento incompresible del material y tiene una expresión similar al modelo neo-hookeano.
• Modelo Arruda-Boyce. Este modelo se explica detalladamente en el siguiente apartado. Como adelanto se cita su función de densidad de energía de deformación:
Ψ = µ∑ CiλL2i−2 �I1̅i − 3i�5
i=1 + 1D1
(Jel2−12
− ln Jel) (4.11)
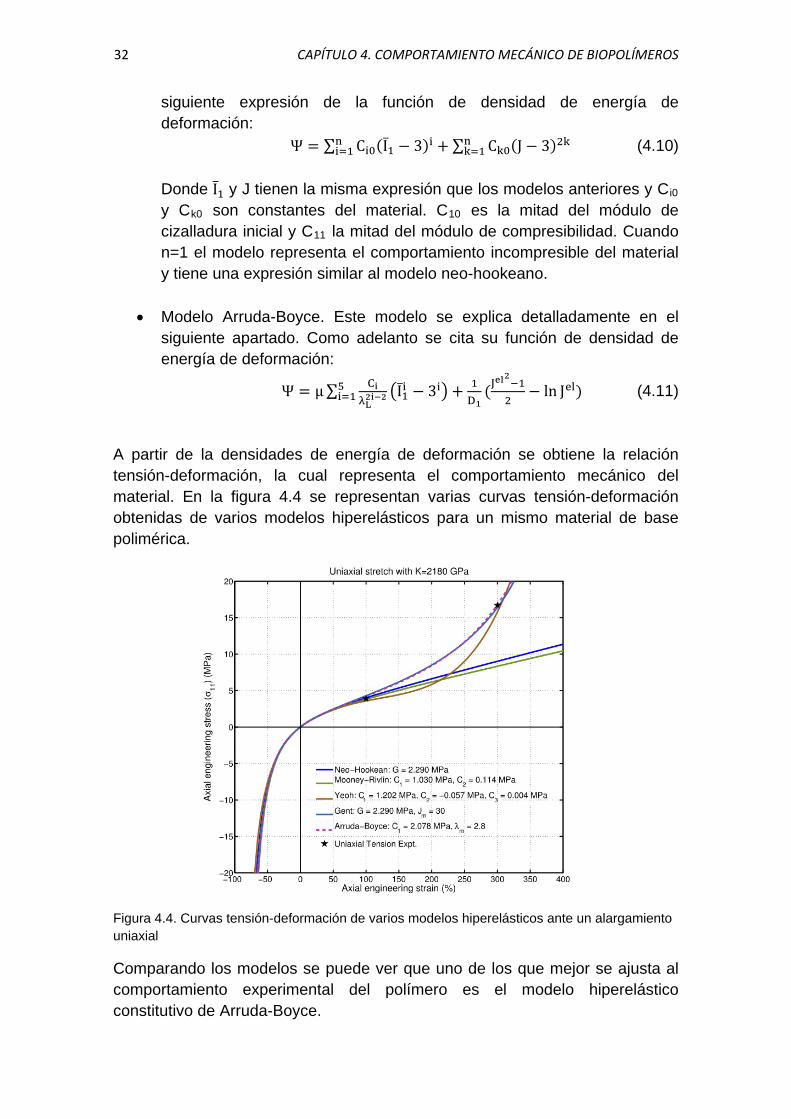
A partir de la densidades de energía de deformación se obtiene la relación tensión-deformación, la cual representa el comportamiento mecánico del material. En la figura 4.4 se representan varias curvas tensión-deformación obtenidas de varios modelos hiperelásticos para un mismo material de base polimérica.
Figura 4.4. Curvas tensión-deformación de varios modelos hiperelásticos ante un alargamiento uniaxial
Comparando los modelos se puede ver que uno de los que mejor se ajusta al comportamiento experimental del polímero es el modelo hiperelástico constitutivo de Arruda-Boyce.

33 CAPÍTULO 4. COMPORTAMIENTO MECÁNICO DE BIOPOLÍMEROS
4.3. Modelo constitutivo de Arruda-Boyce
Como se ha dicho anteriormente, el modelo constitutivo de Arruda-Boyce es un modelo hiperelástico incompresible para grandes deformaciones usado para representar el comportamiento mecánico en materiales con base polimérica. Este proyecto fin de carrera está enfocado en el análisis de las propiedades mecánicas del biopolímero PLA y sus copolímeros afectados por un proceso de hidrólisis a través de su ley de comportamiento, por lo que parece idóneo utilizar el modelo de Arruda-Boyce para representar el comportamiento mecánico en grandes deformaciones de este material. En este apartado se introducirá el modelo constitutivo de Arruda-Boyce original, desacoplado del proceso de hidrólisis.
El modelo se basa en la estadística de la cadena de Langevin para modelar un material con forma de cubo con ocho cadenas que parten de sus vértices al centro (figura 4.5). En el modelo Arruda-Boyce se tiene en cuenta el comportamiento macroscópico de estos materiales, ya que en dicho modelo existen parámetros asociados a la físico-química de los polímeros, como se ve a continuación en la definición matemática del modelo a partir de su densidad de energía de deformación del modelo.
Figura 4.5. Representación del modelo Arruda-Boyce (8 cadenas) [20]
La densidad de energía de deformación de un material con comportamiento Arruda-Boyce tiene la siguiente expresión:
Ψ = NKBΘ√n �βλcadena − √n ln �sinhββ�� (4.12)
siendo N el número de enlaces rígidos por cadena, KB la constante de Boltzmann (1.38065x10-23 J/K), Θ la temperatura en Kelvin, n la densidad de cadenas y donde λcadena y β se definen de la siguiente forma:
λcadena = �I13
β = ℒ−1 �λcadena√n
� (4.13)

34 CAPÍTULO 4. COMPORTAMIENTO MECÁNICO DE BIOPOLÍMEROS
donde I1 es el primer invariante del tensor de deformación izquierdo de Cauchy-Green y ℒ−1 (x) es la función inversa de Langevin que se puede aproximar por:
ℒ−1(x) = �1,31 tan(1,59x) + 0,91x para |x| < 0,841
1sgn(x)−x
para 0,841 ≤ |x| < 1� (4.14)
Este modelo se basa en el enfoque estadístico que posee la función inversa de Langevin, como se ha comentado anteriormente, el cual plantea que los segmentos de cadenas del material presentes entre los puntos de reticulación se pueden simplificar como enlaces rígidos de longitud fija.
El modelo que a continuación se plantea es una forma alternativa, más sencilla de implementar, considerando los primeros cinco términos de la función inversa de Langevin, además de dotar al material de una propiedad de quasi-incompresibilidad [20]:
Ψ(I1̅) = µ∑ CiλL2i−2 �I1̅i − 3i�5
i=1 + 1D
(J2−12− ln J) (4.15)
donde:
C1 =12
C2 =1
20 C3 =
111050
C4 =19
7050 C5 =
519673750
Con:
I1̅ = λ�12 + λ�22 + λ�32 (4.16)
El primer término de la ecuación anterior es la parte desviadora, que tiene unos parámetros característicos (µ,λL), donde μ representa el módulo de cizalladura, el cual se define a partir del módulo de cizalladura inicial μ0,
µ0 = nkBΘ (4.17)
µ0 = µ �1 + 35λL
2 + 99175λL
4 + 513875λL
6 + 4203967375λL
8� (4.18)
Y el término λL es el límite de extensión de red. Cuando se sobrepasa este límite, el esfuerzo se incrementa significativamente, porque las cadenas del polímero están completamente extendidas y rígidas. Este límite se calcula normalmente a través de curvas de ajuste con la siguiente ecuación:
λL = √N (4.19)
El segundo término de la ecuación 4.15 es la parte volumétrica, encargada de representar el comportamiento compresible del material mediante el jacobiano del gradiente de deformaciones (J) y el parámetro D que se relaciona con el módulo de compresibilidad κ,

35 CAPÍTULO 4. COMPORTAMIENTO MECÁNICO DE BIOPOLÍMEROS
D = 2κ (4.20)
El carácter quasi-incompresible del material hace que el jacobiano del tensor gradiente de deformación, F, sea en todo momento igual a uno, por lo que el segundo término de la ecuación 4.15 es igual a cero.
En este modelo se puede ver que la respuesta depende de tres parámetros (µ,λL,D). Estos parámetros son los que necesita Abaqus® para poder simular el comportamiento mecánico de un material hiperelástico Arruda-Boyce.
4.4. Curva tensión-alargamiento (σ-λ)
Este apartado se va a apoyar en la Ley de la elasticidad no lineal (figura 4.6) para obtener la expresión que relacione las tensiones (σ) con los invariantes (I1̅, I2̅, I3̅), ya que estos, a su vez, dependen del alargamiento (λ), por lo que finalmente se tendrá la relación tensión-alargamiento (σ-λ) a partir de la expresión de la densidad de energía de deformación del modelo Arruda-Boyce.
Figura 4.6. Esquema de la ley de la elasticidad no lineal [21]
La expresión de la densidad de energía de deformación del modelo de Arruda-Boyce que se usa en este desarrollo es la de los cinco primeros términos de la función de Langevin de un material quasi-incompresible es la siguiente:
Ψ = µ �12
(I1̅ − 3) + 120λL
2 (I1̅2 − 9) + 111050λL
4 (I1̅3 − 27) + 197000λL
6 (I1̅4 − 81) + 519673750λL
8 (I1̅5 − 243)� +1D
(J2−12− ln J) (4.21)

36 CAPÍTULO 4. COMPORTAMIENTO MECÁNICO DE BIOPOLÍMEROS
Se ve con facilidad que la densidad de energía sólo depende del primer invariante (I1̅ = λ�12 + λ�22 + λ�32) del tensor de Cauchy-Green por la derecha, C, y de las constantes del material λL, deformación crítica de la cadena, de μ, módulo de cizalladura, y de D, el parámetro de incompresibilidad del material, que es igual a la mitad de K, siendo K el módulo de compresibilidad.
Se definen los siguientes coeficientes para facilitar la escritura del problema:
α1 =12
α2 =1
20λL2 α3 =
111050λL4
α4 =19
7000λL6 α5 =
519673750λL8
Además, se definen los siguientes tensores necesarios para el desarrollo del problema.
Primero se define F, que es el tensor gradiente de deformación, como:
𝐅 =
⎝
⎜⎜⎜⎛
𝜕𝑥1𝜕𝑋1
𝜕𝑥1𝜕𝑋2
𝜕𝑥1𝜕𝑋3
𝜕𝑥2𝜕𝑋1
𝜕𝑥2𝜕𝑋2
𝜕𝑥2𝜕𝑋3
𝜕𝑥3𝜕𝑋1
𝜕𝑥3𝜕𝑋2
𝜕𝑥3𝜕𝑋3⎠
⎟⎟⎟⎞
= �𝐹11 𝐹12 𝐹13𝐹21 𝐹22 𝐹23𝐹31 𝐹32 𝐹33
�
Además se definen los siguientes tensores:
𝐂 = 𝐅T𝐅
𝐂 = �F112 + F212 + F312 F11F12 + F21F22 + F31F32 F11F13 + F21F23 + F31F33
F12F11 + F22F21 + F32F31 F122 + F222 + F322 F12F13 + F22F23 + F32F33F13F11 + F23F21 + F33F31 F13F12 + F23F22 + F33F32 F132 + F232 + F332
�
𝐛 = 𝐅𝐅T
𝐛 = �F112 + F122 + F132 F11F21 + F12F22 + F13F23 F11F31 + F12F32 + F13F33
F21F11 + F22F12 + F23F13 F212 + F222 + F232 F21F31 + F22F32 + F23F33F31F11 + F32F12 + F33F13 F31F21 + F32F22 + F33F23 F312 + F322 + F332
�
El desarrollo para llegar al tensor de tensiones de Cauchy es el que se muestra a continuación, basado en las leyes de la hiperelasticidad.
Primero, se parte del segundo tensor de Piola-Kirchhoff, S [21]:
𝐒 = Jp𝐂−1 + 2 ��∂Ψ∂I̅1
+ I1̅∂Ψ∂I̅2� 𝐈 − ∂Ψ
∂I̅2𝐂 − 1
3�∂Ψ∂I̅1
I1̅ + 2 ∂Ψ∂I̅2
I2̅� 𝐂−1� (4.22)

37 CAPÍTULO 4. COMPORTAMIENTO MECÁNICO DE BIOPOLÍMEROS
siendo p la presión hidrostática y definida como[21]:
p = ∂Ψ∂J
(4.23)
El tensor de tensiones de Cauchy es:
𝛔 = J−1𝐅𝐒𝐅T (4.24)
𝛔 = J−1𝐅 �Jp𝐂−1 + 2 ��∂Ψ∂I̅1
+ I1̅∂Ψ∂I̅2� 𝟏 − ∂Ψ
∂I̅2𝐂 − 1
3�∂Ψ∂I̅1
I1̅ + 2 ∂Ψ∂I̅2
I2̅� 𝐂−1�� 𝐅T (4.25)
𝛔 = p𝐅𝐂−1𝐅T + 2J−1 ��∂Ψ∂I̅1
+ I1̅∂Ψ∂I̅2� 𝐅𝟏𝐅T − ∂Ψ
∂I̅2𝐅𝐂𝐅T − 1
3�∂Ψ∂I̅1
I1̅ + 2 ∂Ψ∂I̅2
I2̅� 𝐅𝐂−1𝐅T�
(4.26)
Para obtener dicho tensor se debe derivar la densidad de energía de deformación respecto a los invariantes. Además se debe conocer el valor de los tensores F1FT, FCFT y FC-1FT:
∂Ψ∂I̅1
= µ[α1 + 2α2I1̅ + 3α3I1̅2 + 4α4I1̅3 + 5α5I1̅4] (4.27)
∂Ψ∂I̅2
= ∂Ψ∂I̅3
= 0
FC-1FT =F(FTF) -1FT=FF-TF-1FT=(F-1F)(FTF-T)=1x1=1
F1FT=FFT= b
FCFT =F(FTF)FT=bb=b2
Sabiendo estos valores y haciendo las simplificaciones oportunas, tenemos la siguiente expresión del tensor de tensiones de Cauchy:
𝛔 = p𝟏 + 2J−1µ[α1 + 2α2I1̅ + 3α3I1̅2 + 4α4I1̅3 + 5α5I1̅4] �𝐛 − I̅13𝟏� (4.28)
Esta ecuación relaciona de forma genérica las tensiones (σ) con el primer invariante y el tensor b. Tanto el primer invariante como el tensor b dependen de los alargamientos (λ). Estos alargamientos dependen del tipo de problema (condiciones de contorno y de carga), por lo que en este punto del desarrollo matemático del modelo se debe especificar el tipo de problema que se desea resolver.

38 CAPÍTULO 4. COMPORTAMIENTO MECÁNICO DE BIOPOLÍMEROS
4.5. Ejemplo de aplicación
Como es sabido algunos problemas tienen solución analítica y siendo ésta fácilmente calculable. Ese es el caso de un ensayo uniaxial de tracción, el cual se toma en este apartado como ejemplo para representar el comportamiento mecánico de materiales homogéneos y quasi-incompresibles.
Si se define el tensor gradiente de deformación, F, de la siguiente forma para el caso de alargamiento uniaxial en la dirección x (ó 1):
𝐅 =
⎝
⎜⎜⎜⎛
∂x1∂X1
∂x1∂X2
∂x1∂X3
∂x2∂X1
∂x2∂X2
∂x2∂X3
∂x3∂X1
∂x3∂X2
∂x3∂X3⎠
⎟⎟⎟⎞
= �F11 F12 F13F21 F22 F23F31 F32 F33
� = �λ1 0 00 λ2 00 0 λ3
�
con λ1 = λ y λ2 = λ3 y al ser quasi-incompresible J=|F|=λ1λ2λ3=1, por lo que λ2 = λ3 = 1/√λ quedando F y b con la siguiente forma:
𝐅 = �
λ 0 00 1
√λ0
0 0 1√λ
� 𝐛 = �
λ2 0 00 1
λ0
0 0 1λ
�
Y el primer invariante I1 con la siguiente forma:
I1 = λ12 + λ2
2 + λ32 = λ2 +
2λ
Entonces, el tensor de Cauchy quedaría:
σ11 = p + 2µ �α1 + 2α2(λ2 +2λ
) + 3α3(λ2 +2λ
)2 + 4α4(λ2 +2λ
)3 + 5α5(λ2 +2λ
)4� �λ2 −13
(λ2 +2λ
)�
σ22 = p + 2µ �α1 + 2α2(λ2 +2λ
) + 3α3(λ2 +2λ
)2 + 4α4(λ2 +2λ
)3 + 5α5(λ2 +2λ
)4� �1λ−
13
(λ2 +2λ
)�
σ33 = p + 2µ �α1 + 2α2(λ2 +2λ
) + 3α3(λ2 +2λ
)2 + 4α4(λ2 +2λ
)3 + 5α5(λ2 +2λ
)4� �1λ−
13
(λ2 +2λ
)�
σ12 =p2
+ 2µ �α1 + 2α2(λ2 +2λ
) + 3α3(λ2 +2λ
)2 + 4α4(λ2 +2λ
)3 + 5α5(λ2 +2λ
)4� �0 −13
(λ2 +2λ
)�
σ13 =p2
+ 2µ �α1 + 2α2(λ2 +2λ
) + 3α3(λ2 +2λ
)2 + 4α4(λ2 +2λ
)3 + 5α5(λ2 +2λ
)4� �0 −13
(λ2 +2λ
)�
σ23 =p2
+ 2µ �α1 + 2α2(λ2 +2λ
) + 3α3(λ2 +2λ
)2 + 4α4(λ2 +2λ
)3 + 5α5(λ2 +2λ
)4� �0 −13
(λ2 +2λ
)�

39 CAPÍTULO 4. COMPORTAMIENTO MECÁNICO DE BIOPOLÍMEROS
con α1 = 1
2 α2 = 1
20λL2 α3 = 11
1050λL4 α4 = 19
7000λL6 α5 = 519
673750λL8
Ya sólo falta conocer la expresión de la presión hidrostática p. En un problema analítico, de fácil resolución, se llega a esta expresión tras definir las restricciones cinemáticas del problema. En este caso, se sabe que las tensiones en las dos direcciones distintas a la carga son cero. Por lo tanto, si se ha definido el ensayo uniaxial de tracción en la dirección 1, las componentes σ2 y σ3 serán cero durante todo el problema. Así si se iguala una de las dos tensiones a cero se obtiene la expresión de p:
σ22 = p + 2µ �α1 + 2α2(λ2 +2λ
) + 3α3(λ2 +2λ
)2 + 4α4(λ2 +2λ
)3 + 5α5(λ2 +2λ
)4� �1λ−
13
(λ2 +2λ
)�
= 0
p = −2µ �α1 + 2α2(λ2 +2λ
) + 3α3(λ2 +2λ
)2 + 4α4(λ2 +2λ
)3 + 5α5(λ2 +2λ
)4� �1λ−
13
(λ2 +2λ
)�
Quedando finalmente la expresión de σ11 en función de λ de la siguiente manera:
σ11 = 2µ(λ2 −1λ
) �α1 + 2α2(λ2 +2λ
) + 3α3(λ2 +2λ
)2 + 4α4(λ2 +2λ
)3 + 5α5(λ2 +2λ
)4�
Con esta expresión para cada valor del alargamiento λ se tiene una tensión σ11 que se puede representar en una curva, la cual nos indicará el comportamiento mecánico de dicho material.
En la figura 4.7 se ha representado el comportamiento mecánico de un material homogéneo y quasi-incompresible mediante su correspondiente curva tensión-alargamiento creada con un código en MatLab® donde los parámetros del modelo Arruda-Boyce (µ y λL) se han definido con los siguiente valores:
μ = 2100 MPa λL = 5
También se ha representado la gráfica del modelo de elementos finitos del ejemplo que se ha descrito anteriormente obtenida de Abaqus® (figura 4.8) obteniendo idénticos resultados.

40 CAPÍTULO 4. COMPORTAMIENTO MECÁNICO DE BIOPOLÍMEROS
Figura 4.7. Curva tensión-alargamiento (σ-λ) de un ensayo uniaxial dibujada con MatLab®
Figura 4.8. Curva tensión-alargamiento (σ-λ) de un ensayo uniaxial obtenida de Abaqus®
1 1.5 2 2.5 3 3.5 40
0.5
1
1.5
2
2.5
3
3.5
4x 10
4
Alargamiento (λ)
Tens
ión
( σ) [
MP
a]
Ensayo Uniaxial





























