Embed Size (px)
Citation preview

CONCEPÇÃO DE GRUA DE FILMAGEM COM TRELIÇA MODULAR
TRIANGULAR EM ALUMÍNIO
Vicente Tavares Curi
Projeto de Graduação apresentado ao Curso
de Engenharia Mecânica da Escola
Politécnica, Universidade Federal do Rio de
Janeiro, como parte dos requisitos
necessários à obtenção do título de
Engenheiro.
Orientador: Vitor Ferreira Romano
Rio de Janeiro
Dezembro de 2014

CONCEPÇÃO DE GRUA DE FILMAGEM COM TRELIÇA MODULAR
TRIANGULAR DE ALUMÍNIO
Vicente Tavares Curi
PROJETO DE GRADUAÇÃO SUBMETIDO AO CORPO DOCENTE DO CURSO
DE ENGENHARIA MECÂNICA DA ESCOLA POLITÉCNICA DA
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS
REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE
ENGENHEIRO MECÂNICO.
Aprovado por:
_______________________________________________
Prof. Vitor Ferreira Romano, Dott. Ric. (Orientador)
_______________________________________________
Prof. Fernando Augusto de Noronha Castro Pinto, Dr.-Ing.
_______________________________________________
Prof. Max Suell Dutra, Dr.-Ing.
RIO DE JANEIRO, RJ – BRASIL
DEZEMBRO DE 2014

i
Curi, Vicente Tavares
Concepção de Grua de Filmagem com Treliça
Modular Triangular de Alumínio/ Vicente Tavares Curi. –
Rio de Janeiro: UFRJ/ Escola Politécnica, 2014.
XI, 67 p.:il.; 29,7 cm
Orientador: Vitor Romano Ferreira.
Projeto de Graduação – UFRJ/ Escola Politécnica/
Curso de Engenharia Mecânica, 2014.
Referências Bibliográficas: p. 64.
1. Grua 2. Equipamento de Filmagem. 3. Treliça
Modular. 4. Elementos Finitos. I. Romano, Vitor Ferreira.
II. Universidade Federal do Rio de Janeiro, Escola
Politécnica, Curso de Engenharia Mecânica. III.
Concepção De Grua De Filmagem Com Treliça Modular
Triangular De Alumínio

ii
“A distância entre a loucura e genialidade é medida apenas pelo sucesso”
James Bond

iii
DEDICATÓRIA
A minha melhor amiga e irmã: Fernanda Curi.
Ao meu eterno Tio Bito. Eu sei que você olha por mim e me protege para que eu
alcance todos os meus sonhos.

iv
AGRADECIMENTOS
A Carlos Felipe Curi, Eleonora Tavares e Fernanda Curi. Vocês são tudo para
mim.
Aos grandes amigos que conquistei após ingressar na Engenharia Mecânica da
UFRJ.
Aos dois irmãos que a vida me deu no intercâmbio em Marseille, França.
Aos mosqueteiros Maurício Iglesias, Rafael Bessa e Raphael Santana pela
fidelidade.
Ao Prof. Vitor Romano pela exímia orientação. Superou minhas expectativas
durante todo projeto.
A Guilherme Moura, Gustavo Borges, Juan Chargue, Mariana Dias e André
Garcia pela colaboração.

v
Resumo do Projeto de Graduação apresentado à Escola Politécnica/UFRJ como parte
dos requisitos necessários para a obtenção do grau de Engenheiro Mecânico.
CONCEPÇÃO DE GRUA DE FILMAGEM COM TRELIÇA MODULAR
TRIANGULAR EM ALUMÍNIO
Vicente Tavares Curi
Dezembro/2014
Orientador: Vitor Ferreira Romano
Curso: Engenharia Mecânica
O presente estudo consiste em apresentar a concepção de uma grua de filmagem
visando obter um equipamento leve, de fácil montagem, e com lança modular em
alumínio, adaptável para diferentes alcances de filmagem. Para atingir o objetivo,
segmentou-se o trabalho em etapas como modelagem, detalhamento dos componentes,
análise de elementos finitos dos principais subconjuntos e desenhos de montagem do
equipamento.
Palavras-chave: Grua, Equipamento de Filmagem, Treliça Modular, Elementos Finitos.

vi
Abstract of Undergraduate Project presented to POLI/UFRJ as a partial fulfillment of
the requirements for the degree of Engineer.
CONCEPTION OF A SHOOT CRANE WITH MODULAR TRIANGULAR TRUSS
IN ALUMINIUM
Vicente Tavares Curi
December/2014
Advisor: Vitor Ferreira Romano
Course: Mechanical Engineering
The study presents the conception of a shoot crane, aiming to obtain a light
equipment, easy to assemble and with the lattice boom in aluminum, adaptable to
different shooting ranges. The work is segmented in conceptual design, modeling,
components dimensioning, structural analysis of the main subsets and equipment
assembly drawing.
Keywords: Crane, Shoot Crane, Lattice Boom, Finite Elements.

vii
Índice
1. INTRODUÇÃO ........................................................................................................ 1
1.1. História e Evolução ............................................................................................ 1
1.2. Equipamentos de Movimentação de Câmera ..................................................... 2
1.3. Equipamentos de Filmagem ............................................................................... 4
1.3.1. Câmera ........................................................................................................ 4
1.3.2. Lentes ......................................................................................................... 6
1.3.3. Cabeça remota ............................................................................................ 7
1.4. Gruas de Filmagem ............................................................................................ 8
2. CONCEPÇÃO DO EQUIPAMENTO .................................................................... 10
2.1. Conceito ........................................................................................................... 10
2.2. Dimensões e Alcance ....................................................................................... 11
2.3. Fases do Projeto ............................................................................................... 14
3. DESENVOLVIMENTO DA CONCEPÇÃO ......................................................... 15
3.1. Análise Cinemática .......................................................................................... 15
3.1.1. Mecanismo de quarto barras ..................................................................... 15
3.1.2. Posição ...................................................................................................... 16
3.1.3. Velocidade ................................................................................................ 16
3.1.4. Aceleração ................................................................................................ 18
3.2. Módulos de Treliça Triangular ........................................................................ 19
3.2.1. Elemento triangular .................................................................................. 19
3.2.2. Alumínio ................................................................................................... 20
3.2.3. Módulo treliçado ...................................................................................... 20
3.2.4. Componentes e vínculos ........................................................................... 22
4. DETALHAMENTO DOS COMPONENTES ........................................................ 24
4.1. Lança Principal ................................................................................................ 24
4.2. Caixa Suporte ................................................................................................... 25
4.3. Lança Secundária ............................................................................................. 27
4.4. Coluna .............................................................................................................. 28
4.5. Dolly ................................................................................................................ 30
5. ANÁLISE ESTRUTURAL ..................................................................................... 32
5.1. Análises Estruturais Estáticas .......................................................................... 33

viii
5.1.1. Plataforma da cabeça remota .................................................................... 33
5.1.2. Pino do suporte ......................................................................................... 34
5.1.3. Ponta suporte ............................................................................................ 36
5.1.4. Sistema 4ª barra ........................................................................................ 37
5.1.5. Módulos de treliça triangular .................................................................... 39
5.1.6. Lança secundária ...................................................................................... 42
5.1.7. Caixa suporte ............................................................................................ 44
5.1.8. Perfil U ..................................................................................................... 46
5.1.9. Eixo vertical .............................................................................................. 48
5.1.10. Coluna ....................................................................................................... 49
5.1.11. Dolly ......................................................................................................... 51
5.2. Análise Estrutural Transiente ........................................................................... 53
5.2.1. Módulos de treliça triangular .................................................................... 53
6. SELEÇÃO DE COMPONENTES COMERCIAIS ................................................ 56
6.1. Componentes de Filmagem ............................................................................. 56
6.1.1. Monitor ..................................................................................................... 56
6.1.2. Control Box, Pistola e Joystick ................................................................ 56
6.2. Componentes Estruturais ................................................................................. 58
6.2.1. Anilhas ...................................................................................................... 58
6.2.2. Rolamentos – ponta suporte ..................................................................... 60
6.2.3. Rolamento – eixo I ................................................................................... 62
6.2.4. Rolamento – eixo II .................................................................................. 64
6.2.5. Rolamentos – eixo vertical ....................................................................... 65
6.2.6. Sapatas ajustáveis ..................................................................................... 67
6.2.7. Rodas ........................................................................................................ 68
7. RESULTADOS ....................................................................................................... 70
8. CONCLUSÃO ........................................................................................................ 71
8.1. Estudo Apresentado ......................................................................................... 71
8.2. Trabalhos Futuros ............................................................................................ 72
9. BIBLIOGRAFIA ..................................................................................................... 74
ANEXO A – DESENHOS DE MONTAGEM .............................................................. 76

ix
LISTA DE FIGURAS:
Figura 1.1- Primeira câmera comercial de fita magnética - Ampex VRX 1000 .............. 1
Figura 1.2 - Resolução de Imagem ................................................................................... 5
Figura 1.3 - Sony F55 ....................................................................................................... 5
Figura 1.4 - Cabeça Remota Stabilized Scorpio ............................................................... 7
Figura 1.5 - Dados Técnicos Scorpio ............................................................................... 7
Figura 1.6 - Movimentação da Grua ................................................................................. 8
Figura 1.7 - Grua Estaiada GF 8 [1] ................................................................................. 9
Figura 1.8 - Plataforma para Operador - Giraffe Crane [1] .............................................. 9
Figura 1.9 - Telescópica Motorizada - Supertechno 30 [1] .............................................. 9
Figura 2.1 - Grua e Principais Componentes .................................................................. 11
Figura 2.2 - Medidas Antropométricas ........................................................................... 11
Figura 2.3 - Resultados de variáveis antropométricas (valores em cm). ........................ 12
Figura 2.4 - Alcance superior da grua [mm] .................................................................. 13
Figura 2.5 - Alcance inferior da grua [mm].................................................................... 13
Figura 2.6 - Grua em equilíbrio ...................................................................................... 14
Figura 2.7 - Mapeamento de Etapas de Projeto Mecânico ............................................. 14
Figura 3.1 - Sistema 4 barras .......................................................................................... 15
Figura 3.2 - Sistema 4 barras - Lança Principal ............................................................. 16
Figura 3.3 - Descrição da cinemática ............................................................................. 17
Figura 3.4 - Triângulo x Retângulo ................................................................................ 20
Figura 3.5 - Módulo da Treliça Triangular ..................................................................... 21
Figura 3.6 - Dimensões do Módulo [mm] ...................................................................... 21
Figura 3.7 - Perfis de Interligação .................................................................................. 22
Figura 3.8 - Configuração Módulo-Módulo ................................................................... 23
Figura 3.9 - Configuração “Módulo - Caixa Suporte” ................................................... 23
Figura 4.1 - Lança Principal ........................................................................................... 24
Figura 4.2 – Pinos ........................................................................................................... 25
Figura 4.3 - Caixa Suporte .............................................................................................. 26
Figura 4.4 - Rolamentos da Caixa de Encaixe................................................................ 26
Figura 4.5 - Lança Secundária ........................................................................................ 27
Figura 4.6 - Sistema Pino-Mola ...................................................................................... 28
Figura 4.7 - Coluna [mm] ............................................................................................... 28
Figura 4.8 - Rolamentos Cônicos ................................................................................... 29
Figura 4.9 - Pinos de Posicionamento ............................................................................ 29
Figura 4.10 - Dolly [mm] ............................................................................................... 30
Figura 4.11 – Dolly - Isométrica .................................................................................... 30
Figura 4.12 - Pinos de Travamento ................................................................................ 31
Figura 5.1 - Condições de Contorno - Plataforma Cabeça Remota................................ 33
Figura 5.2 - Tensão Máxima da Plataforma CR ............................................................. 34
Figura 5.3 - Condições de Contorno - Pino Suporte ...................................................... 35
Figura 5.4 - Tensão Máxima do Pino Suporte CR ......................................................... 35

x
Figura 5.5 - Condições de Contorno - Ponta Suporte ..................................................... 36
Figura 5.6 - Tensão Máxima na Ponta Suporte .............................................................. 37
Figura 5.7 - Condições de Contorno - Sistema 4ª barra ................................................. 38
Figura 5.8 - Tensão Máxima no Sistema 4ª Barra .......................................................... 39
Figura 5.9 - Sistema 4ª barra - Malha ............................................................................. 39
Figura 5.10 - Condições de Contorno - Lança Principal ................................................ 40
Figura 5.11 - Tensão Máxima nos Módulos de Treliça .................................................. 41
Figura 5.12 - Região de Descontinuidade na Treliça Triangular ................................... 42
Figura 5.13 - Condições de Contorno - Lança Secundária ............................................. 43
Figura 5.14 - Tensão Máxima na Lança Secundária ...................................................... 43
Figura 5.15 - Lança Secundária - Malha ........................................................................ 44
Figura 5.16 - Condições de Contorno - Caixa Suporte................................................... 45
Figura 5.17 - Tensão Máxima na Caixa Suporte ............................................................ 46
Figura 5.18 - Condições de Contorno - Perfil U ............................................................ 47
Figura 5.19 - Tensão Máxima no Perfil U ...................................................................... 47
Figura 5.20 - Condições de Contorno - Eixo Vertical .................................................... 48
Figura 5.21 - Tensão Máxima no Eixo Vertical ............................................................. 49
Figura 5.22 - Condições de Contorno - Coluna .............................................................. 50
Figura 5.23 - Tensão Máxima na Coluna ....................................................................... 50
Figura 5.24 - Condições de Contorno - Dolly ................................................................ 52
Figura 5.25 - Tensão Máxima na Dolly .......................................................................... 52
Figura 5.26 - Tensão Máxima na Análise Transiente ..................................................... 54
Figura 5.27 - Região de Descontinuidade da Análise Transiente................................... 55
Figura 6.1 - Monitor 7" ................................................................................................... 56
Figura 6.2 – (a)Control Box (b)Pistola (c)Joystick ....................................................... 57
Figura 6.3 - Itens de Filmagem ....................................................................................... 58
Figura 6.4 - Anilha 25 kg ............................................................................................... 59
Figura 6.5 - Anilha 5 kg ................................................................................................. 60
Figura 6.6 - Anilha 1 kg ................................................................................................. 60
Figura 6.7 - Carregamento sobre Rolamento - Ponta Suporte ........................................ 61
Figura 6.8 - Especificação Rolamento Ponta Suporte .................................................... 61
Figura 6.9 - Especificação Rolamento Eixo I ................................................................. 63
Figura 6.10 - Carregamento sobre Rolamento - Eixo I .................................................. 63
Figura 6.11 - Especificação Rolamento Eixo II ............................................................. 64
Figura 6.12 - Carregamento sobre Rolamento - Eixo II ................................................. 65
Figura 6.13 - Especificação Rolamentos Eixo Vertical .................................................. 66
Figura 6.14 - Carregamento sobre Eixo Vertical ............................................................ 67
Figura 6.15 - Especificações da Sapata Ajustável .......................................................... 67
Figura 6.16 - Carregamento sobre Sapatas ..................................................................... 68
Figura 6.17 - Especificação da Roda .............................................................................. 69
Figura 8.1 - Grua Estaiada .............................................................................................. 73

xi
ÍNDICE DE TABELAS
Tabela 1.1 - Alguns Equipamentos de Filmagem............................................................. 3
Tabela 1.3 - Dados Dimensionais da Sony F55................................................................ 5
Tabela 1.2 - Modelos de Câmeras e Lentes ...................................................................... 6
Tabela 7.1 - Resultado dos Componentes Estruturais .................................................... 70
Tabela 7.2 - Resultado dos Componentes Comerciais ................................................... 70

1
1. INTRODUÇÃO
1.1. História e Evolução
O ato de registrar imagens com impressão de movimento sobre um suporte
cinematográfico é o que denomina a ação de filmar. Há registros históricos da
necessidade humana de registrar o movimento, e sua comprovação vem desde os
desenhos e pinturas retratando o comportamento da vida humana e da própria natureza.
A história da filmagem ganha vida por volta de 1890, com a invenção das primeiras
câmeras com captação de movimento. Esta época apresentavam filmes com duração de
um minuto e até 1927 as imagens em movimentos eram produzidas sem som.
Por volta dos anos 50 surgiu a primeira máquina com captura em fita magnética
[1], em que as pessoas podiam contar com filmadoras com filme de até 16 mm. Duas
décadas depois, essas câmeras se tornaram mais populares, porém a qualidade era ruim.
A partir de 1990, a evolução das tecnologias cinematográficas para os processos
digitais apresentou inovações como a não deterioração do arquivo digital, independente
da frequência de uso. Esse fator trouxe fim à preocupação com gastos com reparo dos
arquivos de filmagem.
Figura 1.1- Primeira câmera comercial de fita magnética - Ampex VRX 1000

2
Contudo, a movimentação da câmera é um fator decisivo no setor
cinematográfico, e as câmeras não se deslocavam da mesma forma em todas as eras de
filmagem. Convenções e tecnologias foram evoluindo com a passar dos anos.
1.2. Equipamentos de Movimentação de Câmera
Nos primórdios, as filmadoras eram estacionárias, pois diretores e produtores
julgavam a movimentação de câmera confusa para o espectador, assim como as edições.
Com isso, estas eram posicionadas para dar a sensação à audiência de que estaria
assistindo da primeira fila do teatro. Somado a isso, era mais caro adicionar movimento
às câmeras, pois demandaria mais tempo para planejar as tomadas em movimento e
necessitaria de equipamentos específicos [3].
Com a evolução desses equipamentos e maior acessibilidade aos mesmos, a
indústria cinematográfica expandiu sua versatilidade para dar movimento às filmagens.
A Erro! Fonte de referência não encontrada. enumera alguns dos equipamentos
utilizados e suas funções:

3
Tabela 1.1 - Alguns Equipamentos de Filmagem
Equipamento Função Imagem
Grua
Captura de imagem estática ou dinâmica,
com possibilidade de movimentação pan
(horizontal) e tilt (vertical) em gama de
posições superior ao Camera Man.
Cabeça Remota
Fixado ao conjunto Câmera-Lente, operam-
se seus possíveis movimentos durante a
filmagem.
Steady-Cam
Sistema que câmera é acoplada ao operador
por meio de colete que estabiliza imagem
produzida
Tripé
Um dos suportes para câmera mais usados.
Permite execução de movimentos suaves e
uniformes com sua cabeça.
Tele-Prompter
Equipamento acoplado à câmera que filma
e transmite texto com sistema de espelho à
45º
Travelling
Movimento de tracking do tipo transversal
onde câmera, objeto e operador se
movimentam ao mesmo tempo.
Drone Veículo não tripulado adotado como suporte para câmera para fazer imagens aéreas
Os próximos tópicos serão destinados a apresentar alguns tipos de câmera e
lentes. A partir da definição do equipamento que atenda as necessidades deste estudo,
serão apresentados conceitos que auxiliaram na concepção da grua.

4
1.3. Equipamentos de Filmagem
1.3.1. Câmera
A câmera profissional de vídeo é um equipamento utilizado para captar as
imagens que serão posteriormente transmitidas aos telespectadores. Há diversos
formatos padronizados de transmissão de imagem que caracterizam a tecnologia
(analógica ou digital) e a resolução empregados na indústria (NTSC, SECAM, PAL,
HDTV).
Neste projeto será adotada uma captação de imagem em HD (high-definition
television), ou seja, tanto os modelos de câmeras usadas no projeto, quanto os
equipamentos da cabeça remota, devem estar de acordo com os requisitos para esse
padrão. Esse sistema de transmissão possui uma resolução significativamente superior
aos formatos tradicionais (NTSC, SECAM, PAL), sendo transmitido digitalmente. Esta
tecnologia foi lançada inicialmente nos EUA durante a década de 1990 por um
consórcio envolvendo AT&T, General Instrument, MIT, Philips, Sarnoff, Thomson e
Zenith. Os padrões HDTV atuais são definidos pela norma ITU-R BT709 como 1080i
(interlaced), 1080p (progressive) ou 720p usando uma proporção de tela de 16:9.

5
Figura 1.2 - Resolução de Imagem
A grua deste trabalho será projetada para uso em estúdios de televisão, portanto
levará em consideração câmeras como a Sony F55 HD [5], utilizadas em grandes
emissoras brasileiras.
Figura 1.3 - Sony F55
Tabela 1.2 - Dados Dimensionais da Sony F55

6
1.3.2. Lentes
As lentes são de grande importância para as filmagens, pois elas também
determinam a qualidade da imagem que será fornecida, além de serem as responsáveis
por parâmetros como zoom e foco. A primeira ação a se verificar no projeto é o tipo de
conjunto câmera e lente que será usado. O projeto deve suportar as câmeras que serão
usadas para o tipo de filmagem pedida, e poder realizar os movimentos de Pan e Tilt
sem que ocorram falhas, independente da posição ou da combinação de movimentos
demandado.
Outro aspecto importante, além da massa do equipamento, é a dimensão do
conjunto, pois isso influencia tanto no dimensionamento da carcaça, largura e altura
posicionamento da câmera, quanto no torque que será usado para os movimentos.
Foi realizada uma pesquisa de câmeras e lentes usadas no mercado que podem ser
acopladas [5].
Tabela 1.3 - Modelos de Câmeras e Lentes

7
.
1.3.3. Cabeça remota
A cabeça remota, onde ficará acoplado o sistema câmera lente, será baseado no
conjunto Stabilized Scorpio, que possuem uma capacidade para lentes entre 35-300 mm
(Sony 300 mm F/2.8G II Telephoto Prime Lens – Tabela 1.2) de comprimento efetivo
[6]. Esse conjunto total possui carga máxima de 45 kg.
Figura 1.4 - Cabeça Remota Stabilized Scorpio
Figura 1.5 - Dados Técnicos Scorpio
Para efeitos de estudo, o primeiro dado de entrada para a concepção da grua será
a carga máxima de 50 kg, a partir dos dados técnicos citados acima.

8
1.4. Gruas de Filmagem
A grua é um equipamento de filmagem composto de uma haste longa, chamada
também de lança, que se apoia sobre um suporte a partir de uma articulação. Este apoio
pode ser próprio para a grua, ou uma adaptação de um tripé. A câmera será posicionada
em uma extremidade da lança, e na oposta serão colocados contrapesos para equilibrar a
lança. Esse sistema tornará suave a movimentação da haste durante a filmagem. Para
garantir que o suporte da câmera se mantenha perpendicular ao chão, a lança se acopla a
um sistema quatro barras.
Figura 1.6 - Movimentação da Grua
Este equipamento pode apresentar lança inteiriça, telescópica ou modular. Esta
ultima facilita o processo de montagem no local de uso. O comprimento e robustez
dependem da carga máxima a ser suportada, que pode variar desde câmeras pequenas
até mesmo ao peso do operador, quando se instala uma plataforma, como ocorre em
produções grandes de cinema e televisão.
A monitoração da imagem é feita na base da lança em um visor (LCD ou CRT),
conectado diretamente à saída de vídeo da câmera. Junto ao monitor, é possível
controlar remotamente o zoom e o foco da câmera. As gruas mais modernas apresentam

9
o aparelho de filmagem acoplado ao sistema de cabeça remota, que terá seus
movimentos de pan (horizontal) e tilt (vertical) monitorados pelo operador a partir de
um sistema joystick. Abaixo segue alguns tipos de grua encontrados no mercado:
Figura 1.7 - Grua Estaiada GF 8 [1]
Figura 1.8 - Plataforma para Operador - Giraffe Crane [1]
Figura 1.9 - Telescópica Motorizada - Supertechno 30 [1]

10
O propósito do estudo, baseado nos conceitos apresentados, é projetar uma grua
modular não motorizada com sistema quatro barras, como mostrado na Figura 1.6,
aplicável à realidade de pequenos projetos de indústria de televisão e cinema.
2. CONCEPÇÃO DO EQUIPAMENTO
2.1. Conceito
O conceito deste estudo é projetar uma grua com componentes modulares. Isto
tornaria o equipamento de fácil montagem e desmontagem em locais de uso. Os
principais dados impostos ao estudo são listados a seguir:
Lança principal composta por módulos de treliça triangular em alumínio;
Alcance máximo superior de 4000 mm (pé direto duplo citado no Regulamento
Geral de Edificações Urbanas), podendo variar dependendo do número de módulos de
treliça que forem utilizados. Neste caso, serão usados três módulos;
Dimensões de envelope de cada submontagem inferior a 2000 mm, para que
possam ser projetados cases que facilitem seu transporte;
Giro da lança de 360º em torno do eixo da coluna;
Contrapeso suficiente para equilibrar carga de 50 kg correspondente à ao
conjunto câmera e cabeça remota;
Esses dados de entrada guiaram a concepção do modelo a seguir:

11
Figura 2.1 - Grua e Principais Componentes
2.2. Dimensões e Alcance
A grua deverá obedecer a valores ergonômicos para o conforto do operador. Estes
valores foram retirados de tabelas antropométricas [7] e essas dimensões auxiliam o uso
do equipamento por um usuário padrão (1700 mm de altura).
Figura 2.2 - Medidas Antropométricas
12
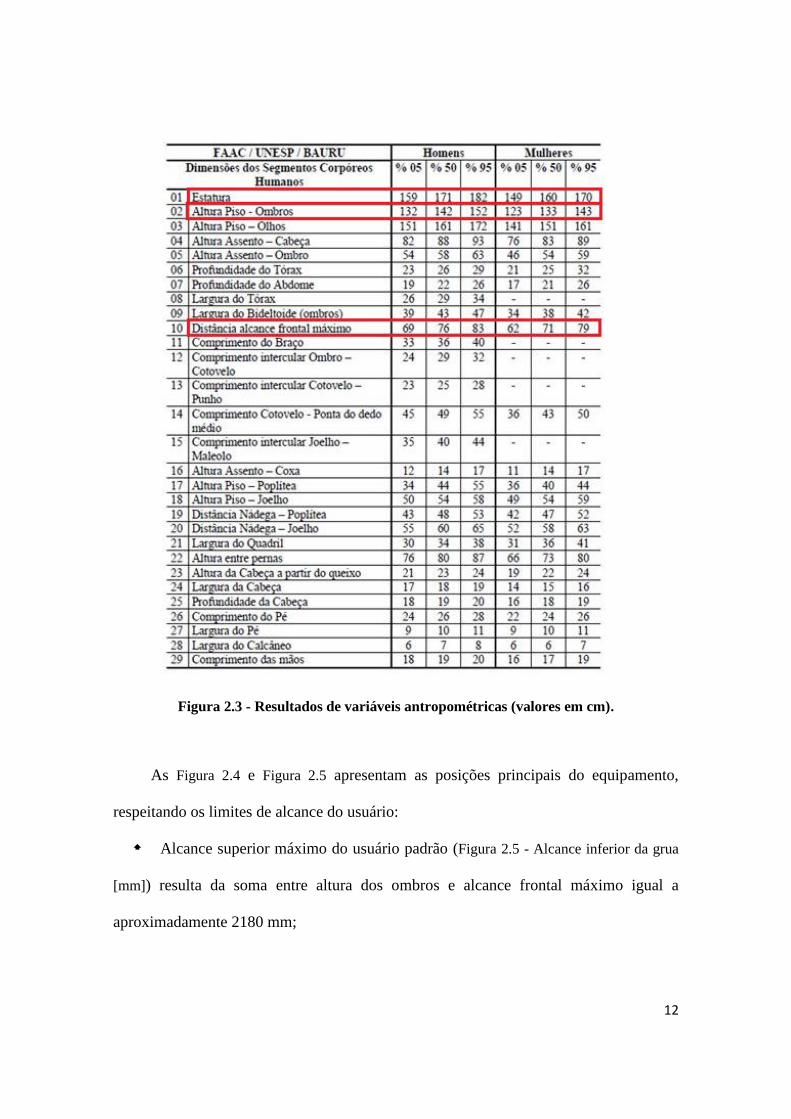
Figura 2.3 - Resultados de variáveis antropométricas (valores em cm).
As Figura 2.4 e Figura 2.5 apresentam as posições principais do equipamento,
respeitando os limites de alcance do usuário:
Alcance superior máximo do usuário padrão (Figura 2.5 - Alcance inferior da grua
[mm]) resulta da soma entre altura dos ombros e alcance frontal máximo igual a
aproximadamente 2180 mm;

13
Alcance inferior mínimo do usuário padrão (Figura 2.4) resulta de subtração entre
altura dos ombros e cumprimento ombro-punho igual a ± 660 mm
Figura 2.4 - Alcance superior da grua [mm]
Figura 2.5 - Alcance inferior da grua [mm]

14
Figura 2.6 - Grua em equilíbrio
2.3. Fases do Projeto
O termo “Projeto Mecânico” refere-se a projeto de objetos e sistemas de natureza
mecânica, tais como máquinas, peças, dispositivos, ferramentas e instrumentos. A
otimização de um projeto começa com seu planejamento, dividindo suas etapas em
tarefas iterativas para o alcance do melhor resultado. Esta divisão de tarefas, também
chamada de mapeamento de processos, guiará o presente estudo.
A imagem abaixo mostra o mapeamento de processos de um projeto de máquinas
padrão [8]:
Figura 2.7 - Mapeamento de Etapas de Projeto Mecânico

15
A realidade deste estudo pode ser inserida no mapeamento padrão de projetos
mecânicos. Após a análise da necessidade e da apresentação dos dados de entrada, os
próximos capítulos farão o desenvolvimento da concepção, o detalhamento de cada
submontagem e o dimensionamento de seus componentes a partir da análise de
elementos finitos.
3. DESENVOLVIMENTO DA CONCEPÇÃO
3.1. Análise Cinemática
3.1.1. Mecanismo de quarto barras
A grua a ser concebida possui dois graus de liberdade. A lança principal apresenta
um sistema quatro barras que garante perpendicularidade entre a cabeça remota e o solo
durante toda movimentação do equipamento.
Figura 3.1 - Sistema 4 barras

16
Figura 3.2 - Sistema 4 barras - Lança Principal
O esquema acima descreve o mecanismo de um sistema de quatro barras. A
dinâmica da grua a ser concebida facilita a interpretação deste esquema, pois no
presente estudo as barras “2” e “4” (respectivamente a Caixa Suporte e a Plataforma da
Cabeça Remota) tem o mesmo comprimento, assim como as barras “3” e “1”. Portanto
“θ2” e “θ4” descreverão o mesmo giro.
3.1.2. Posição
O deslocamento vertical do conjunto câmera e cabeça remota será descrito por
Lxθ (Figura 3.3). A razão entre L e S é de 5:1, os movimentos do operador deverão ser
suaves e curtos para centralizar a imagem desejada.
3.1.3. Velocidade
A ilustração a seguir descreve a movimentação da cabeça remota em relação ao
referencial inercial:

17
Figura 3.3 - Descrição da cinemática
A equação que descreve a velocidade linear do ponto C (representa a localização
da cabeça remota) em relação ao ponto A (solidário ao referencial inercial S1), descrito
também no referencial S1 é:
Os referencias S1 (inercial), S2 e S3 estão respectivamente solidários aos corpos
base A, AB e BC. A velocidade do ponto C no referencial S1 é igual a soma vetorial da
velocidade de C no referencial S2 com a velocidade em S1 do ponto B fixo em S2, mais
o produto vetorial da velocidade angular de S2 em relação a S1 com o vetor posição de
C com respeito a B [9]. Como o objetivo é descobrir a velocidade de C lida no
referencial inercial, é necessário descrever as matrizes de rotação entre os referencias S2
– S3 (giro em x, ϕ) e S1-S2 (giro em z, θ).
T¹(S2 <-> S3) = [
1 0 00 𝑐𝜙 −𝑠𝜙0 𝑠𝜙 𝑐𝜙
]

18
[𝑐𝜃 −𝑠𝜃 0𝑠𝜃 𝑐𝜃 00 0 1
]
A estratégia é de resolver termo a termo. O primeiro termo teria como solução a
equação abaixo, levando em consideração a descrição dos termos em S2:
Os primeiros dois termos desta equação são nulos, pois os pontos são solidários
aos referenciais. Logo, o resultado desta equação é:
O segundo termo da equação principal é nulo, pois B é solidário ao referencial
S1. Com isso, o resultado obtido através da equação principal, considerando a descrição
dos termos em S1, descreve a velocidade absoluta da cabeça remota em relação ao
referencial inercial.
3.1.4. Aceleração
A equação que descreve a aceleração do conjunto câmera e cabeça remota é:
T²(S1<-> S2) =

19
Utilizando da mesma estratégia de cálculo da velocidade linear, a aceleração
linear absoluta do conjunto descrita na base inercial S1 é:
Os resultados apresentados para velocidade e aceleração absolutas serão regidos
pelo apoio do operador sobre Barra de Manuseio. Para obter uma imagem desejada, o
operador servirá de atuador e amortecedor durante a filmagem, pois este regerá a
velocidade imposta sobre a lança da grua e o quão suave será o deslocamento do
conjunto.
3.2. Módulos de Treliça Triangular
Este tópico, dando continuidade ao desenvolvimento do conceito, dará ênfase ao
principal componente do equipamento, os módulos de treliça triangular.
3.2.1. Elemento triangular
A estrutura triangular, sobre influência de uma carga, não alterará seu formato até
que seus lados dobrem, se estendam, quebrem ou se suas articulações se soltem. Em
contrapartida, o retângulo é dependente da força em suas articulações para manter sua
estrutura. Como curiosidade, arquitetos japoneses consideram construir seus arranha-
céus em formato triangular para que estes edifícios suportem melhor cargas geradas por
terremotos.
A grua de filmagem está sobre influencia da carga da câmera e da cabeça remota
durante toda sua operação. Baseando-se nos dados citados acima, será utilizado o
formato triangular para os módulos da lança principal.

20
Figura 3.4 - Triângulo x Retângulo
3.2.2. Alumínio
A estrutura da grua exige um material com boa relação resistência/peso. A liga de
alumínio 6061, além de apresentar esta característica, possui ótima aceitação ao
processo de soldagem (TIG/MIG), dureza elevada e ainda excelente grau de polimento e
brilho.
O conceito a ser elaborado utilizará a liga ABNT ASTM 6061 T6, que oferece as
propriedades mecânicas apresentadas no quadro abaixo:
Tabela 3.1 - Propriedades Mecânicas da Liga de Alumínio 6061 T6
3.2.3. Módulo treliçado
O conceito do módulo de treliça, todo em alumínio, é composto de três perfis de
tubo quadrado (2”x2” e 1/8” de espessura) dispostos em formato triangular por quatro
suportes padronizados [12]. A distribuição das cargas faz com que o tubo superior sofra
tração, enquanto os dois inferiores, compressão.

21
Figura 3.5 - Módulo da Treliça Triangular
Os suportes dos perfis são interligados por barras de contraventamento, para
auxiliar no suporte às cargas provenientes da cabeça remota. Ao centro do tubo
superior, será fixado outro suporte, com barras de ¼’’ articuladas nos pinos. A função
destas articulações é acoplar um segundo sistema de perfis no eixo inferior que garanta
o funcionamento do mecanismo de quatro barras.
Por fim, buscando atender a lista de dados de entrada, citada no tópico 2.1, os
componentes foram concebidos com cotas de envelope menores que 2000 mm para que
cases pudessem ser elaborados.
Figura 3.6 - Dimensões do Módulo [mm]

22
3.2.4. Componentes e vínculos
Os componentes do módulo citados no tópico anterior são todos vinculados por
solda (TIG e MIG são recomendadas para 6061 T6) [11]. Portanto, o usuário do
equipamento receberá os módulos prontos para a montagem da lança.
Como forma de facilitar a fixação entre módulos, o estudo concebe perfis de
alumínio (1 3/4”x1 3/4”).
Figura 3.7 - Perfis de Interligação
Estes perfis são aparafusados (M10) nas configurações “módulo-módulo” ou
“módulo-caixa suporte”. Para diminuir possíveis efeitos de corrosão, é recomendado
que esses perfis sejam revestidos de resina epóxi na configuração “módulo-caixa
suporte”, pois a Caixa Suporte é fabricada em aço 1045. Este material possui tensão de
escoamento avaliada em 310 MPa (SAE/AISI 1045) [13].

23
Figura 3.8 - Configuração Módulo-Módulo
Figura 3.9 - Configuração “Módulo - Caixa Suporte”
24
4. DETALHAMENTO DOS COMPONENTES
O próximo capítulo apresentará cada uma das submontagens, suas funções e
vínculos. Como mostradas anteriormente, os componentes são:
Lança Principal;
Caixa Suporte;
Lança Secundária;
Coluna;
Dolly.
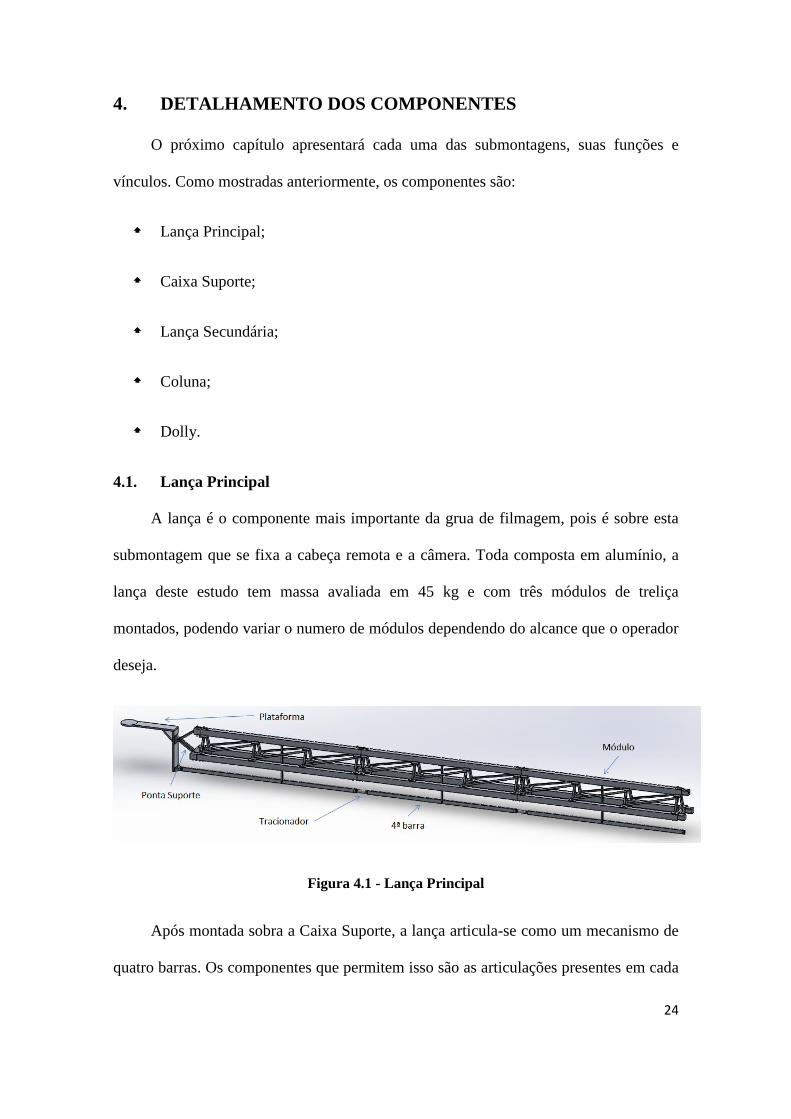
4.1. Lança Principal
A lança é o componente mais importante da grua de filmagem, pois é sobre esta
submontagem que se fixa a cabeça remota e a câmera. Toda composta em alumínio, a
lança deste estudo tem massa avaliada em 45 kg e com três módulos de treliça
montados, podendo variar o numero de módulos dependendo do alcance que o operador
deseja.
Figura 4.1 - Lança Principal
Após montada sobra a Caixa Suporte, a lança articula-se como um mecanismo de
quatro barras. Os componentes que permitem isso são as articulações presentes em cada

25
módulo e os pinos da Ponta Suporte que permite a Plataforma se manter perpendicular
ao solo.
Figura 4.2 – Pinos
Os tracionadores, além de acoplar aos perfis que formam o Sistema 4ª barra, tem
a função de ajustar o posicionamento da Plataforma. Em cada uma de suas extremidades
há uma rosca de direções opostas, permitindo que seu giro aproxime ou afaste os perfis
interligados.
Por fim, a Ponta Suporte faz a ligação entre os módulos e a Plataforma. Esta será
intercambiável e servirá de encaixe para a lança independentemente do número de
módulos que se pretende utilizar.
4.2. Caixa Suporte
Este componente representa o vínculo entre a Lança Principal, Lança Secundária e
Coluna. Para sustentar todas as cargas, esta submontagem é feita em aço 1045.

26
Figura 4.3 - Caixa Suporte
O componente mais robusto deste conjunto é o Perfil U, sobre o qual se deposita
todo o peso das treliças, e esta carga é transmitida para a Coluna através do Flange.
Sobre o perfil são fixados os Eixo I e Eixo II que permitem, respectivamente, o
pivotamento da Lança Principal e dos perfis da 4ª Barra.
Sobre o Eixo I está posicionada a Caixa de Encaixe. Este elemento unirá as lanças
através dos perfis citados no tópico 3.3. Porém, o movimento de rotação da caixa sobre
o eixo será possível através de rolamentos presos na extremidade do mesmo.
Figura 4.4 - Rolamentos da Caixa de Encaixe

27
Por fim, para controle do movimento vertical da lança (tilt), estão acoplados ao
sistema uma pista e um pino de freio. Ao girar o pino, este se choca contra a pista,
travando o movimento da treliça. Os esforços sobre o pino não serão críticos, pois a
movimentação da grua estará suavizada pelos contrapesos.
4.3. Lança Secundária
Esta submontagem fará contrapeso com a Lança Principal através de anilhas,
servirá de suporte para Monitor / Control Box e para as barras de manuseio de grua.
Figura 4.5 - Lança Secundária
As barras chamadas Suporte Anilhas são projetadas para suportar até 380 kg em
anilhas como contrapeso. Por isso, são os únicos componentes desta submontagem em
aço 1045. O contato entre estas barras e a treliça retangular deve ter depósito de material
epóxi para evitar corrosão.
A Barra de Manuseio, além de servir como apoio ao operador, será suporte para
joystick da cabeça remota e da pistola zoom/foco/íris. O posicionamento desta barra
poderá variar de acordo com o sistema pino-mola acoplado.

28
Figura 4.6 - Sistema Pino-Mola
4.4. Coluna
O componente denominado Coluna, composto de elementos em aço 1045,
transmitirá toda carga das lanças para a Dolly. O vínculo entre a Caixa Suporte e a
Coluna é feito a partir do flange acoplado sobre o Eixo Vertical.
Figura 4.7 - Coluna [mm]
Esta submontagem é dividida em diversos componentes para facilitar a
montagem. A Carenagem protege a extremidade superior do eixo. Este último,
denominado Eixo Vertical, é posicionado sobre dois rolamentos cônicos de rolo para
garantir sua concentricidade durante operação.

29
Figura 4.8 - Rolamentos Cônicos
O posicionamento correto das casas dos rolamentos é garantido por pinos
distanciados 120º, como mostrado na imagem abaixo. Por fim, o vínculo entre a Base
Soldada e a Dolly é feito por parafusos M12.
Figura 4.9 - Pinos de Posicionamento

30
4.5. Dolly
A Dolly, fabricada em aço 1045, é a submontagem responsável por suportar todo
peso da grua e oferecer sustentação para que o sistema opere de forma suave, sem
causar distúrbios na imagem gerada pela câmera.
Figura 4.10 - Dolly [mm]
Figura 4.11 – Dolly - Isométrica

31
A base deste equipamento foi projetada para que toda carga advinda da coluna
seja distribuída diretamente para as rodas de aro 12’’. Isto gera estabilidade, junto às
quatro Sapatas. Estas entrarão em contato com o solo quando a grua for estacionada
para entrar em operação de filmagem.
Com o propósito de facilitar o deslocamento da base, a Barra de Manuseio está
ligada diretamente ao Sistema Dirigível. Este sistema permite que as rodas girem em até
20º. Ao estacionar, devem-se inserir os pinos de travamento para evitar o giro das rodas.
Figura 4.12 - Pinos de Travamento
32
5. ANÁLISE ESTRUTURAL
Este capítulo apresentará a estratégia de todas as análises estruturais, utilizando a
ferramenta de elementos finitos, feitas sobre os componentes da Grua. A ordem das
análises seguirá o fluxo de carregamento da grua até o referencia inercial, portanto, da
Cabeça remota até a Dolly.
Alguns pontos relevantes foram aplicados em todas as análises:
Valor padrão de gravidade (g = 9806,6 mm/s²);
Inserção de todos os materiais utilizados na concepção de Grua no “Arquivo de
Engenharia” (Engineering Data);
Malha com no mínimo 2 (dois) elementos na parede mais fina de cada
componente, com o objetivo de obter o melhor resultado das interações entre contatos e
superfícies;
Tentativa de utilizar Hexaedro (Hex Dominant) como o elemento de malha, pois
quanto maior o número de vértices do elemento, maior o número de nós (nodes), melhor
é a interação entre elementos.
Limite superior de nós de 2x10³ (Limite suportado pela máquina disponível);
Gerar “Informação Inicial” (Initial Information) dentro do item Connections –
Contact Tool. Após resultado de relatório, suprimir ou otimizar contatos com menos de
5 nós em “Número de Contato”(Number Contacting);
Exigir como resposta mínima: “Tensão Equivalente de Von-Mises” (Equivalent
Stress) e “Deformação Direcional” (Directional Deformation).

33
As forças inseridas no modelo estarão apresentadas de acordo com os eixos de
coordenadas disponíveis em cada figura.
5.1. Análises Estruturais Estáticas
5.1.1. Plataforma da cabeça remota
O soma das massas do conjunto Cabeça Remota (Stabilized Scorpio) e Câmera
(Sony F55) é 45 kg, como citado no tópico 1.3. Como segurança, foi utilizada a carga
de 500 N (aproximadamente 50 kg).
Condições de contorno:
Suporte cilíndrico para os suportes de pino;
Carga da Câmera + Cabeça Remota: (0, 0, -500) N;
Figura 5.1 - Condições de Contorno - Plataforma Cabeça Remota
Os resultados apresentados pelo programa a partir destes dados de entrada foram:
Tensão máxima de 103.35 MPa no suporte do pino superior;

34
Deslocamento máximo de 2.78 mm;
Figura 5.2 - Tensão Máxima da Plataforma CR
Os resultados de tensão apresentados comprovam que a Plataforma, a partir das
dimensões utilizadas, pode ser fabricada com a liga de Alumínio 6061 T6, prevista
anteriormente.
5.1.2. Pino do suporte
Os pinos utilizados nos suportes cilíndricos do item anterior são iguais. Logo, os
valores utilizados como condição de contorno para a próxima análise foram os máximos
registrados nos suportes. As condições de contorno aplicadas foram:
Suporte cilíndrico nas extremidades do pino (condição extrema);
Força resultante de 2830 N aplicada no centro do pino;

35
Figura 5.3 - Condições de Contorno - Pino Suporte
Os resultados apresentados pelo programa foram:
Tensão Máxima de 375 MPa na junção do pino com o suporte cilíndrico;
Deformação Máxima de 0.048 mm.
Figura 5.4 - Tensão Máxima do Pino Suporte CR

36
A partir dos resultados obtidos, o elemento deve ser fabricado de aço AISI 1045
laminado a frio. Este material oferece 450 MPa de escoamento [13].
5.1.3. Ponta suporte
As cargas calculadas pelas forças de reações na Plataforma foram repassadas para
esta análise. Como a conexão entre estas é articulada, não há momento. As condições de
contorno aplicadas foram:
Suporte fixo para os três vínculos aparafusados com os perfis de interligação;
Força resultante aplicado ao vínculo com o pino: (605, -976.2; 0) N;
Figura 5.5 - Condições de Contorno - Ponta Suporte
Os resultados obtidos pelo programa foram:
Tensão máxima de 20.48 MPa;
Deslocamento máximo vertical de 2.68x10-3
mm;

37
Figura 5.6 - Tensão Máxima na Ponta Suporte
Os resultados demonstram que este elemento poderá ser fabricado da liga de
alumínio 6061 T6.
5.1.4. Sistema 4ª barra
O sistema em análise recebe a carga da Plataforma e está fixo pelas articulações
aparafusadas à Lança Principal. Com o intuito de diminuir o número de componentes,
porém sem perder a veracidade da análise, as três articulações e a Plataforma foram
substituídas por molas. Para isso, foram feitas análises com cargas unitárias sobre os
componentes e, a partir do deslocamento registrado, calcula-se o coeficiente elástico. Os
dados de entrada utilizados foram:
Carga proveniente do apoio cilíndrico inferior da Plataforma: (0, 0, -976.2) N;
Suporte cilíndrico sobre o menor eixo da Caixa Suporte;

38
Figura 5.7 - Condições de Contorno - Sistema 4ª barra
Os resultados obtidos pelo programa foram:
Deformação máxima horizontal de 9.38x10-3
mm;
Deformação máxima vertical de 0.16 mm;
Tensão máxima em um dos elementos tracionadores de 39 MPa;

39
Figura 5.8 - Tensão Máxima no Sistema 4ª Barra
Este resultado permite que o sistema seja fabricado em liga de alumínio 6061 T6.
Figura 5.9 - Sistema 4ª barra - Malha
5.1.5. Módulos de treliça triangular
Esta análise importa as cargas de reação lidas na análise da Ponta Suporte e aplica
estes valores sobre os respectivos perfis de interligação. As fixações utilizadas são os

40
perfis que serão aparafusados na Caixa de Encaixe. Como resultado, além das tensões e
deslocamentos, são pedidas as reações em cada perfil, para que estes valores sejam
aplicados corretamente à Caixa. Os dados de entrada foram:
Força no perfil superior de interligação: (0,-694,1029) N;
Momento no perfil superior: (22569, 0,0) N*mm;
Força nos perfis inferiores: (±34, -144,212) N;
Momento nos perfis inferiores: (±5012, -11062,7421) N*mm;
Suporte fixo nas faces dos perfis aparafusados à Caixa;
Figura 5.10 - Condições de Contorno - Lança Principal
Os resultados obtidos na análise foram:
Tensão máxima de 237.14 MPa na interação entre os módulos;
Deformação vertical de 23 mm;

41
Figura 5.11 - Tensão Máxima nos Módulos de Treliça
O resultado apresentado pelo programa é passível de diferentes interpretações. Ao
aproximar do local de máximo de tensão, é possível observar uma descontinuidade na
interação entre os elementos. Ao melhorar a qualidade da malha, o resultado de máxima
tensão diminui seu valor, podendo assim concluir que este ponto não apresenta
resultado coerente com a realidade.
O local mais apropriado para apresentar resultados de máxima tensão seria perto
dos perfis de interligação com a Caixa. Nessa região, a tensão média é de 50 MPa.

42
Figura 5.12 - Região de Descontinuidade na Treliça Triangular
Apesar dos resultados apresentados pelo programa, os módulos de treliças podem
ser fabricados em liga de alumínio 6061 T6 e apresentar fator de segurança acima de 1.
5.1.6. Lança secundária
As cargas geradas sobre esta estrutura provem das anilhas que farão contrapeso à
carga da Câmera e da Cabeça Remota. Em sua outra extremidade, os quatro perfis de
interligação serão aparafusados à Caixa. Esta estrutura também serve de suporte para o
Monitor, Control Box e a carga proveniente do apoio do operador sobre Barra de
Manuseio. Os dados de entrada utilizados foram:
Suporte fixo sobre as faces dos perfis de interligação;
Carga das anilhas de 25 kg apoiadas sobre a barra inferior: (0,-3000,0) N;
Carga das anilhas de 1 e 4 kg apoiadas sobre a barra superior: (0,-400,0) N;
Carga resultante do Monitor/Control Box/Operador: (0,-200,0) N

43
Figura 5.13 - Condições de Contorno - Lança Secundária
Os resultados obtidos da análise foram:
Tensão máxima sobre a barra suporte das anilhas de 25 kg: 156 MPa;
Deformação máxima vertical de 3.48 mm;
Figura 5.14 - Tensão Máxima na Lança Secundária

44
Figura 5.15 - Lança Secundária - Malha
Os dados resultantes mostram que as barras de apoio à anilhas devem ser
fabricadas em aço 1045 e a Lança Secundária, assim como os módulos de treliça, pode
ser fabricada em liga de alumínio 6061 T6.
5.1.7. Caixa suporte
As cargas imprimidas sobre este elemento provem das reações dos perfis de
interligação da Lança Principal e da Lança Secundária. O ponto de apoio da caixa é o
Eixo I, fixo no Perfil U. Os dados de entrada para esta análise foram:
Força no perfil superior da Lança Principal: (20475, 0, 0)N;
Momento no perfil superior da Lança Principal: (0, 0, -1.6x105) N*mm;
Força em cada perfil inferior da Lança Principal: (-10062, -573, 0)N;
Momento em cada perfil inferior da Lança Principal: (0,0, -1.7x105) N*mm;
Força em cada perfil superior da Lança Secundária: (-4493, -933, 0)N;
Momento em cada perfil superior da Lança Secundária: (0, 0, 4.16x105) N*mm:

45
Força em cada perfil inferior da Lança Secundária: (4400, -1066, 0)N;
Momento em cada perfil inferior da Lança Secundária: (0, 0, 4.46x105) N*mm;
Figura 5.16 - Condições de Contorno - Caixa Suporte
Os resultados dessa análise foram:
Tensão máxima registrada no vínculo superior da Lança Principal: 267 Mpa;
Deslocamento máximo vertical de 0.29 mm;

46
Figura 5.17 - Tensão Máxima na Caixa Suporte
Este elemento deve ser fabricado em aço 1045 para garantir a sustentação das
lanças. É valido lembrar que os perfis de interligação são de alumínio, logo, os encaixes
devem receber tratamento em epóxi.
5.1.8. Perfil U
Este elemento foi projetado de forma robusta para suportar o peso das lanças e da
Caixa Suporte. O suporte do perfil é aplicado ao flange que posiciona o elemento sobre
o Eixo vertical. Uma parcela das cargas é aplicada sobre o Eixo I, e a outra parte,
proveniente do Sistema 4ª Barra, é aplicada ao Eixo II. Os dados de entrada são:
Suporte fixo sobre as faces aparafusadas do flange;
Carga proveniente das lanças e da Caixa Suporte: (0, -5000, 0) N;
Carga proveniente do Sistema 4ª barra: (0, 0, -976) N;

47
Figura 5.18 - Condições de Contorno - Perfil U
Os resultados obtidos da análise foram:
Tensão máxima no centro do Eixo 2: 150 MPa;
Deslocamento máximo vertical de 0.07 mm;
Figura 5.19 - Tensão Máxima no Perfil U
48
Os resultados da análise mostra que a ideia inicial de fabricar os eixos e o perfil
em aço 1045 será satisfatória à estrutura.
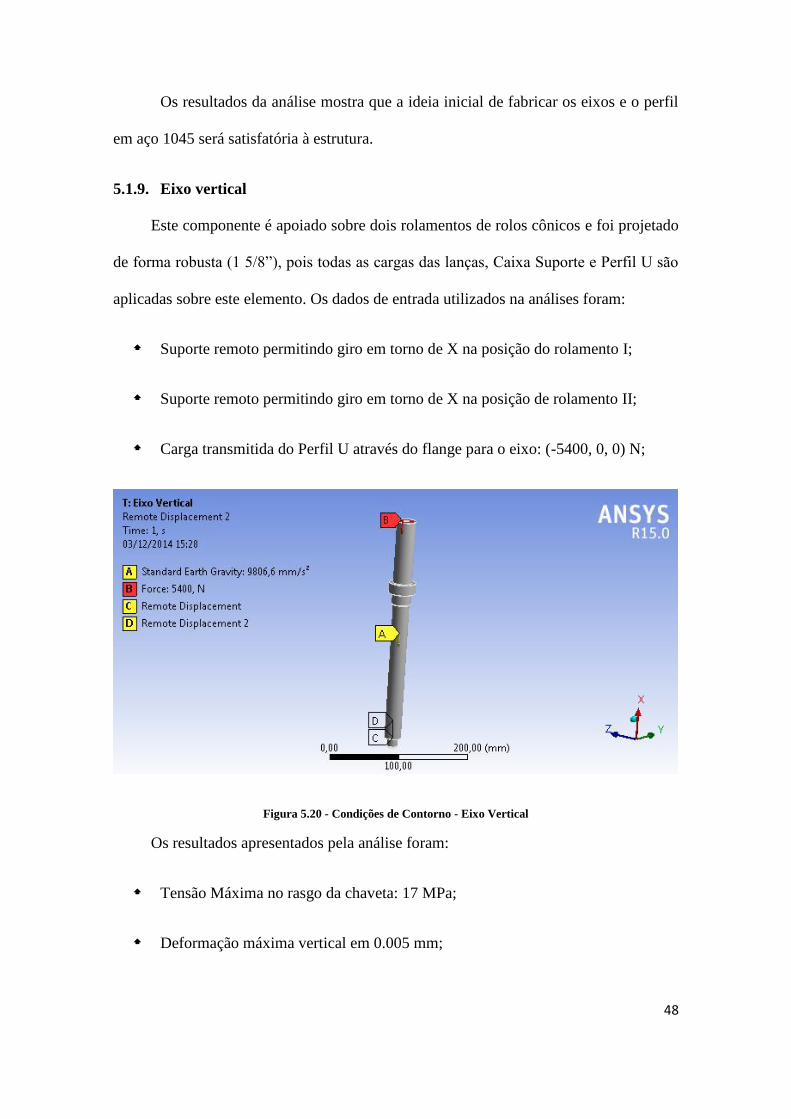
5.1.9. Eixo vertical
Este componente é apoiado sobre dois rolamentos de rolos cônicos e foi projetado
de forma robusta (1 5/8”), pois todas as cargas das lanças, Caixa Suporte e Perfil U são
aplicadas sobre este elemento. Os dados de entrada utilizados na análises foram:
Suporte remoto permitindo giro em torno de X na posição do rolamento I;
Suporte remoto permitindo giro em torno de X na posição de rolamento II;
Carga transmitida do Perfil U através do flange para o eixo: (-5400, 0, 0) N;
Figura 5.20 - Condições de Contorno - Eixo Vertical
Os resultados apresentados pela análise foram:
Tensão Máxima no rasgo da chaveta: 17 MPa;
Deformação máxima vertical em 0.005 mm;

49
Figura 5.21 - Tensão Máxima no Eixo Vertical
Os resultados obtidos mostram que o Eixo Vertical está mais robusto do que o
necessário para suportar as cargas aplicadas sobre o mesmo. O material utilizado no
conceito do elemento foi aço 1045.
5.1.10. Coluna
A Coluna possui a base soldada como suporte de fixação na análise, por onde,
posteriormente, as cargas serão transmitidas para a Dolly. As cargas incididas sobre a
coluna provem tanto reação do Eixo Vertical sobre as casas dos rolamentos quanto da
pré-carga de 50 kg exercida por cada esticador para mantê-la perpendicular à base. Os
dados de entrada utilizados na análise foram:
Suporte fixo na base soldada da Coluna;
Pré-carga sobre cada maninha dos esticadores: 500 N;
Carga proveniente do Eixo Vertical sobre o rolamento I: (0, -5334, 0) N;
Carga proveniente do Eixo Vertical sobre o rolamento II: (0, -51, 0) N;

50
Figura 5.22 - Condições de Contorno - Coluna
Os resultados desta análise foram:
Tensão máxima descrita nas manilhas dos esticadores: 27 Mpa
Deformação máxima vertical de 0.013 mm;
Figura 5.23 - Tensão Máxima na Coluna

51
A análise sobre as tensões na Coluna demonstram que o subconjunto, assim
como o Eixo Vertical, foi projetado com dimensões acima das necessárias para suportar
as cargas impostas. A princípio, o elemento seria fabricado em aço 1045, porém os
resultados demonstram que, com as geometrias utilizadas na concepção da
submontagem, a liga de alumínio 6061 T6 seria suficiente para oferecer um coeficiente
de segurança elevado.
5.1.11. Dolly
O subconjunto a ser analisado possui diversos componentes com paredes de
espessura fina, o que exigiria um número de elementos excessivo para obter uma
resposta condizente com a realidade. Para contornar esta dificuldade, a estratégia obtida
foi análise em simetria, utilizando somente metade dos corpos para descrever o
comportamento de todos os elementos sem exceder o número de nós. Além disso, as
montagens das rodas foram substituídas por molas que descrevem o mesmo
comportamento, assim como foi realizado na análise do Sistema 4ª barra.
O intuito desta análise é de avaliar a capacidade das sapatas de suportar toda carga
advinda da Coluna e da pré-carga dos esticadores. Os dados de entrada utilizados foram:
Suporte fixo na base das sapatas;
Carga (simétrica) da Coluna exercida sobre a Dolly: (0, -3900, 0) N;
Pré-carga sobre cada manilha dos esticadores: 500 N;

52
Figura 5.24 - Condições de Contorno - Dolly
Os resultados apresentados pela análise foram:
Deformação máxima vertical de 0.37 mm;
Tensão Máxima descrita sobre o corpo das sapatas: 71 MPa;
Figura 5.25 - Tensão Máxima na Dolly

53
O resultado desta análise comprova que as sapatas serão suficientes para
oferecer sustentabilidade para toda estrutura. A distribuição das cargas demonstrada
pela imagem mostra que os esforços foram direcionados para as rodas, como previsto
durante a concepção do subconjunto. A Dolly poderá ser fabricada em alumínio ou em
aço 1045.
5.2. Análise Estrutural Transiente
5.2.1. Módulos de treliça triangular
O objetivo desta análise final é simular um possível cenário de uso da grua, onde
o operador esteja movimentando a lança e realize uma parada brusca, ou colida o
equipamento. Os dados de entrada da análise são os mesmos da análise estática, exceto
pela velocidade inicial de 1 m/s implicada sobre a ponta da lança. O resultado obtido
pela análise foi:
Tensão Máxima entre ligação dos módulos: 321 MPa;
Deformação máxima total de 8.86 mm;

54
Figura 5.26 - Tensão Máxima na Análise Transiente
Assim como apresentado na análise estática deste subconjunto, a geração de
malha é falha em certos pontos e oferece regiões de descontinuidade. O máximo de
tensão oferecido nesta análise pertence a uma região onde os elementos vizinhos não
apresentam o mesmo comportamento.

55
Figura 5.27 - Região de Descontinuidade da Análise Transiente
Todavia, a região próxima da fixação apresenta tensões que apresentam máximo
em 135 MPa, valor abaixo do escoamento do alumínio 6061 T6, o que comprova que o
material e geometria suportariam situações cotidianas de uso do equipamento
concebido.

56
6. SELEÇÃO DE COMPONENTES COMERCIAIS
6.1. Componentes de Filmagem
A listagem completa dos itens necessários para geração de imagens descreve
desde câmera aos itens de cabeamento. Este tópico citará alguns componentes principais
que influenciam diretamente na concepção da Grua.
6.1.1. Monitor
Este componente auxilia o operador a obter imagens precisas enquanto opera a
Grua. O suporte projetado possui dimensões para comportar monitores entre 7 e 9
polegadas, que possuam canais de áudio/vídeo, para comunicação com a Control Box. O
item comercial selecionado possui resolução 1280:800, e sinais de entrada e saída
3G/HD/SDSDI/HDMI [14].
Figura 6.1 - Monitor 7"
6.1.2. Control Box, Pistola e Joystick
Os elementos desse tópico, além de auxiliar diretamente na operação de
filmagem, necessitam de posicionamentos específicos sobre a Grua para facilitar o
trabalho de quem a opera.

57
(a)
(b)
(c)
Figura 6.2 – (a)Control Box (b)Pistola (c)Joystick

58
A Control Box [15] possui suporte sobre a Lança Secundária, próximo ao suporte
do monitor, para reduzir o comprimento do cabeamento. A Pistola Zoom/Foco/Iris e o
Joystick de Cabeça Remota são fixados sobre a Barra de Manuseio para que o operador
possa utilizá-los durante a filmagem.
Figura 6.3 - Itens de Filmagem
6.2. Componentes Estruturais
O intuito deste tópico é avaliar alguns dos itens estruturais que não foram
mencionados durante as análises de elementos finitos.
6.2.1. Anilhas
O cálculo da combinação de anilhas necessárias para fazer o contrapeso com o
conjunto utiliza os seguintes dados de entrada:
Gravidade: g = 9.807 [m/s²];
Massa do conjunto Câmera + Cabeça Remota: 50 kg;

59
Massa da Lança Principal: 45 kg;
Massa da Lança Secundária: 20 kg;
Distância das anilhas à Caixa Suporte: 1 m;
Distância do centro de massa da Lança Principal à Caixa Suporte: 2.5 m;
Distância do centro de massa da Lança secundária à Caixa Suporte: 0.5 m;
Ao aplicar a equação do somatório de momentos no centro de massa da Caixa
Suporte, obtém-se:
O conceito e análise de elementos foram realizados com uma combinação de
anilhas comerciais de 25, 5 e 1 kg, em um somatório de 382 kg. As dimensões das
anilhas são (Altura x Largura x Profundidade):
Anilha de 25 kg: 370x370x40 mm;
Figura 6.4 - Anilha 25 kg
Anilha de 5 kg: 150x150x40 mm;
𝐴𝑛𝑖𝑙𝑙ℎ𝑎𝑠 = 𝐷𝑐𝑎𝑚∗𝑔∗𝑃𝑐𝑎𝑚−𝐷𝑙𝑠∗𝑃𝑙𝑠∗𝑔+𝐷𝑙𝑝∗𝑃𝑙𝑝∗𝑔
𝐷𝑎𝑛𝑖∗𝑔= 352𝑘𝑔

60
Figura 6.5 - Anilha 5 kg
Anilha de 1 kg: 130x130x20 mm;
Figura 6.6 - Anilha 1 kg
6.2.2. Rolamentos – ponta suporte
O rolamento utilizado neste elemento durante a modelagem é o SKF 618/7 [16],
com carga estática máxima avaliada em 400 N. São posicionados dois iguais dispostos
em contato com o Pino Suporte. Porém, as cargas avaliadas pelas análises são
superiores a suportada por este elemento (574 N).

61
Figura 6.7 - Carregamento sobre Rolamento - Ponta Suporte
De acordo com catálogos utilizados, o rolamento que suportaria essa carga, sem
alterar a dimensão do pino, é o SKF 607 [16], com carga estática máxima avaliada em
950 N. Para utilização deste componente, a Ponta Superior necessitará de aumento do
diâmetro da casa do rolamento de 14 para 19 mm.
Figura 6.8 - Especificação Rolamento Ponta Suporte

62
O cálculo da vida útil dos rolamentos do capítulo 6 teve como base o programa
específico do fornecedor (SKF Bearing Calculator). Os dados de entrada foram
estipulados pelo manual da SKF para rolamentos em baixas rotações (15). Estes são:
Número de rotações: 30 r/min;
Temperatura de operação: 40 °C;
Viscosidade à 40 ºC: 70 mm²/s;
Carga respectiva a cada rolamento (axial ou radial);
O rolamento da Ponta Suporte apresentou vida útil (SKF rating life) de 3870 horas
e um fator de esforços estáticos “Fs” (capacidade de carga estática [kN]/carga estática
equivalente [kN]) de 4.1. Este fator é descrito a partir das seguintes ponderações [16]:
1,5 < Fs < 2,5 Para exigências elevadas;
1,0 < Fs < 1,5 Para exigências normais;
0,7 < Fs < 1,0 Para exigências reduzidas.
6.2.3. Rolamento – eixo I
Há dois rolamentos que fazem interface entre o Eixo I e a Caixa Suporte e são
expostos a mesma carga devido a simetria dos componentes. Durante a modelagem, o
componente utilizado foi o SKF 61812 [16], com carga máxima estática avaliada em
11.4 kN.

63
Figura 6.9 - Especificação Rolamento Eixo I
As análises mostraram que a carga máxima está avaliada em 2.7 kN,
comprovando que o uso deste rolamento é suficiente para sua aplicação.
Figura 6.10 - Carregamento sobre Rolamento - Eixo I
O resultado do programa do forneceu como resposta 6189 horas de vida útil e 4.4
como fator de esforços estáticos.

64
6.2.4. Rolamento – eixo II
Este componente faz interface entre o Sistema 4ª Barra e o Eixo II. O rolamento
utilizado durante a modelagem foi o SKF 6202 [16], com carga estática máxima
avaliada em 3.75 kN.
Figura 6.11 - Especificação Rolamento Eixo II
A carga máxima avaliada na análise foi de 0.98 kN, comprovando a possibilidade
de uso do componente sem riscos de falha. O resultado do programa do forneceu como
resposta 32400 horas de vida útil e 8.2 como fator de esforços estáticos.
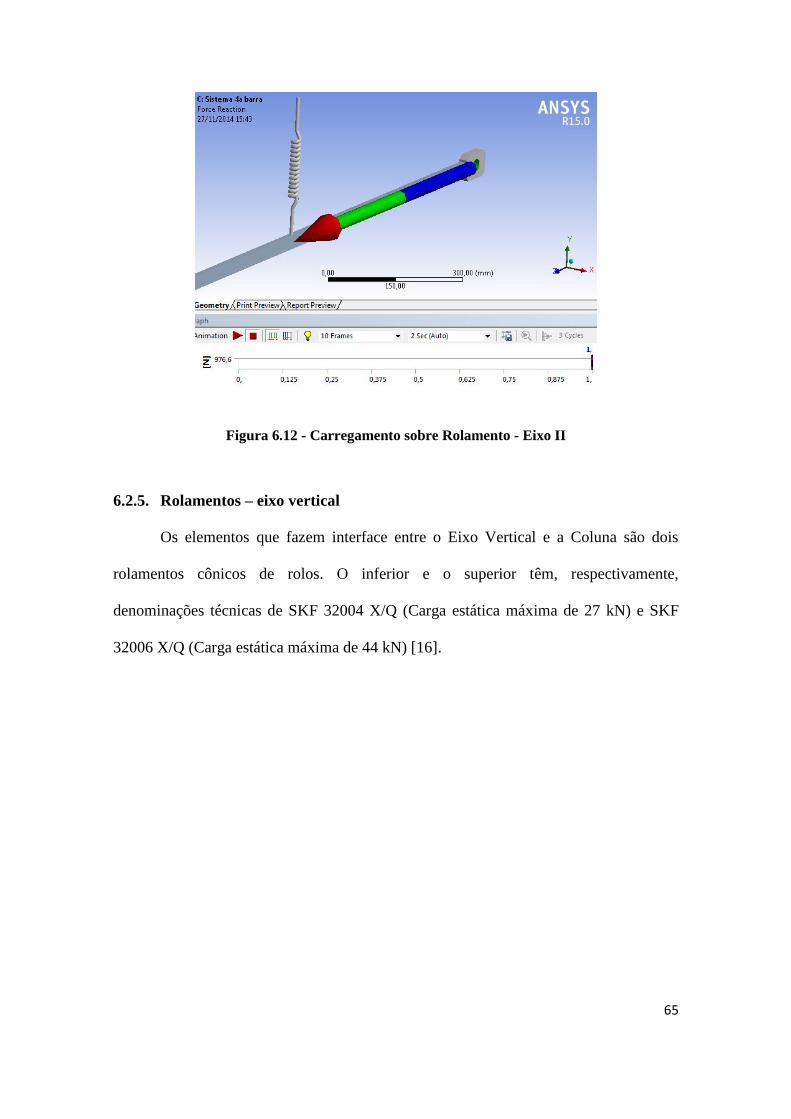
65
Figura 6.12 - Carregamento sobre Rolamento - Eixo II
6.2.5. Rolamentos – eixo vertical
Os elementos que fazem interface entre o Eixo Vertical e a Coluna são dois
rolamentos cônicos de rolos. O inferior e o superior têm, respectivamente,
denominações técnicas de SKF 32004 X/Q (Carga estática máxima de 27 kN) e SKF
32006 X/Q (Carga estática máxima de 44 kN) [16].

66
Figura 6.13 - Especificação Rolamentos Eixo Vertical
As análises foram feitas para dois cenários, pois o Eixo Vertical não tocará
perfeitamente a superfície dos dois rolamentos ao mesmo tempo. Os resultados
apresentaram carga máxima para os rolamentos inferior e superior de 5.38 kN. Com
isso, comprova-se que o uso destes componentes é suficiente para suas aplicações.

67
Figura 6.14 - Carregamento sobre Eixo Vertical
O rolamento inferior apresentou como resultados 3530 horas de vida útil e 3.5 de
fator de esforços estáticos. O superior, 99500 horas e 9.3 como fator.
6.2.6. Sapatas ajustáveis
Este elemento foi utilizados no conceito da Grua baseando-se em sapatas
ajustáveis para andaime. As especificações do produto preveem carga máxima de 6 Kn
[17].
Figura 6.15 - Especificações da Sapata Ajustável
68
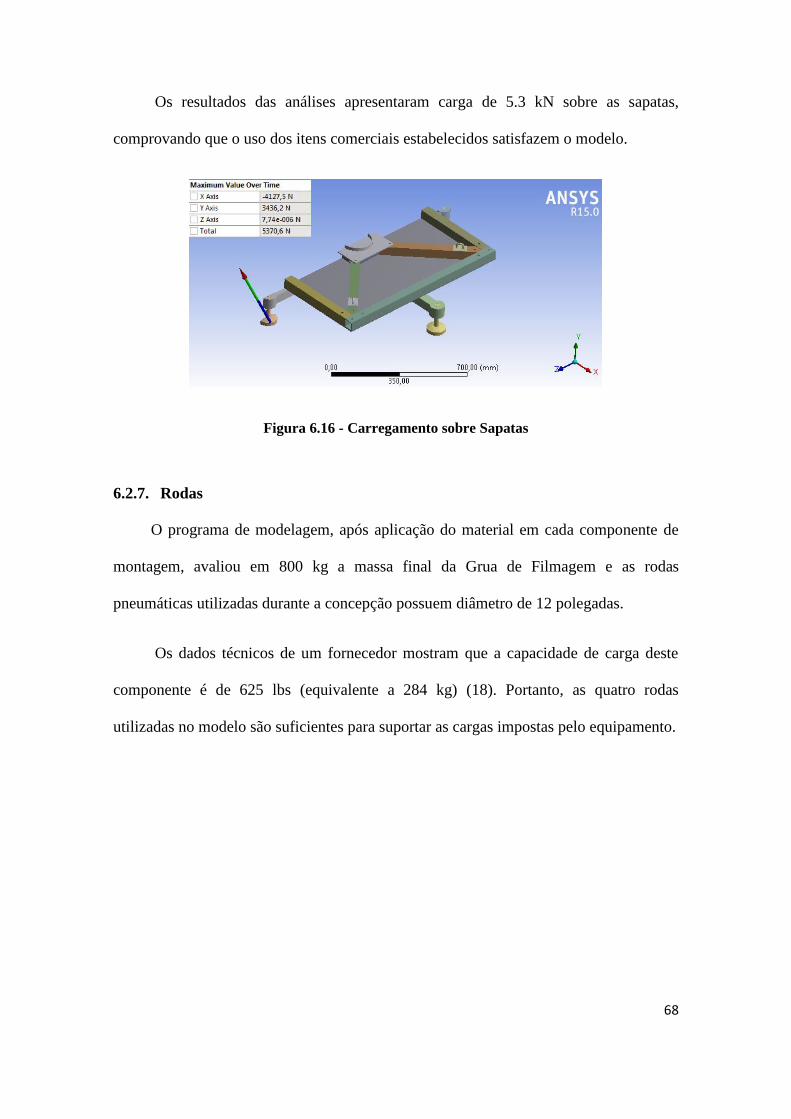
Os resultados das análises apresentaram carga de 5.3 kN sobre as sapatas,
comprovando que o uso dos itens comerciais estabelecidos satisfazem o modelo.
Figura 6.16 - Carregamento sobre Sapatas
6.2.7. Rodas
O programa de modelagem, após aplicação do material em cada componente de
montagem, avaliou em 800 kg a massa final da Grua de Filmagem e as rodas
pneumáticas utilizadas durante a concepção possuem diâmetro de 12 polegadas.
Os dados técnicos de um fornecedor mostram que a capacidade de carga deste
componente é de 625 lbs (equivalente a 284 kg) (18). Portanto, as quatro rodas
utilizadas no modelo são suficientes para suportar as cargas impostas pelo equipamento.

69
Figura 6.17 - Especificação da Roda

70
7. RESULTADOS
As tabelas a seguir fazem compilação dos resultados apresentados pelas análises
de elementos finitos feitos sobre cada subconjunto e da seleção dos principais
componentes comerciais.
Tabela 7.1 - Resultado dos Componentes Estruturais
Tabela 7.2 - Resultado dos Componentes Comerciais
Os resultados compilados da Tabela 7.1 mostram que a grua possui uma
deformação vertical total de aproximadamente 31 mm após ação dos esforços sobre
estrutura.

71
8. CONCLUSÃO
8.1. Estudo Apresentado
O objetivo do estudo foi conceber, modelar e analisar uma grua de filmagem e,
com o auxílio do método de elementos finitos, avaliar a atuação dos esforços sobre a
estrutura. Para entender as necessidades deste equipamento, foi necessário entender
sobre o meio profissional em que esta está inserido.
O setor de cine-vídeo utiliza gruas de filmagem para tomadas aéreas que
melhoram a percepção do espectador sobre o cenário. Portanto, este equipamento deve
oferecer estabilidade à câmera e conforto para seu respectivo operador. Além disso, por
ser um dispositivo de grandes dimensões, a facilidade de montagem é um fator
importante para sua concepção. Com isso, surge a ideia de conceber uma grua com
lança modular, composta de um material leve e com alta relação resistência/peso.
A modelagem foi estruturada a partir de catálogos de empresas fabricantes deste
equipamento. O interesse principal desta consulta era de levantar as vantagens que cada
grua possui e reuni-las em um mesmo produto. As características trazidas para o modelo
foram: lança composta por módulos, apoio da coluna sobre dolly, suporte para monitor e
unidade de comando eletrônico, sapatas e esticadores para estabilização, entre outros.
A partir destas considerações, o modelo foi concebido, sempre com a precaução
de compor cada subconjunto com o máximo de componentes comerciais, evitando
possíveis fabricações, soldagens e usinagem de peça específica. Estes processos
encareceriam o projeto se a ideia final fosse fabricá-lo.
A etapa seguinte à concepção foi a utilização do software para realizar o estudo de
elementos finitos sobre cada subconjunto para avaliar seu respectivo comportamento às
72
cargas impostas. Porém, o fator limitante principal para a apuração de resultados mais
precisos era a capacidade da máquina disponível de realizar estudos com malhas mais
refinadas. Isto se comprova com as respostas das análises feitas sobre os módulos de
treliça triangular, com as zonas de descontinuidade gerada entre elementos. Para os
outros subconjuntos que exigiam malhas menos refinadas, a capacidade da máquina foi
suficiente para apresentar resultados satisfatórios.
Durante as análises e compilação dos resultados, observou-se que alguns
componentes, como o Eixo e a Coluna, foram dimensionados acima do necessário para
os carregamentos aplicados sobre os mesmos, apresentando coeficientes de segurança
altos. Em caso de construção, isto impactaria diretamente no peso da grua, tornando-o
desvantajoso comparado aos concorrentes. Por outro lado, os demais componentes e
subconjuntos atenderam as expectativas após as análises de elementos finitos.
Em virtude dos dados mencionados, mesmo com algumas desvantagens geradas
pelo limite de capacidade da máquina e de itens dimensionados acima do necessário, o
estudo sobre a grua de filmagem atendeu as etapas de projeto estabelecidas.
8.2. Trabalhos Futuros
A continuidade deste projeto é motivada pela evolução constante das tecnologias
que envolvem a indústria cinematográfica. A seguir estão descritas propostas de
melhoria para o estudo:
Construir um protótipo para validar os parâmetros construtivos obtidos da
modelagem.

73
Adicionar motorização à Grua, para tornar mais precisa a movimentação do
equipamento;
Adicionar freio ao movimento de pan da Lança Principal (giro horizontal);
Modelar sistema de estaiagem por cabos de aço para Lança Principal com mais
de três módulos. O objetivo desse sistema será diminuir as cargas sobre os módulos de
treliça e diminuir a deformação elástica do conjunto.
Figura 8.1 - Grua Estaiada

74
9. BIBLIOGRAFIA
1. Misteri Digital. [Online] [Citado em: 24 de 11 de 2014.]
http://misteridigital.wordpress.com/2007/09/24/the-history-of-video-tape-and-camera/.
2. Unidas Produções. Unidas Produções. [Online] [Citado em: 24 de 11 de 2014.]
www.unidasproducoes.com.br/historia-da-filmagem-e-cinema/.
3. Fazendo Vídeo. Fazendo Vídeo. [Online] [Citado em: 24 de 11 de 2014.]
http://www.fazendovideo.com.br/vtsup.asp .
4. Sony - Broadcast and Business Solutions. Pro Sony. [Online] Sony. [Citado em: 25
de 11 de 2014.] https://pro.sony.com/bbsc/ssr/show-
highend/resource.solutions.bbsccms-assets-show-highend-
F55.shtml?PID=I:35mm_F55:F55%23/f55t5_7%23/f55t5_7#/f55t1_13.
5. Santos, Bruno Gomes dos. Projeto Conceitual de Equipamento para Movimentação
de Câmera com Estrutura em Alumínio e Fibra de Carbono. Rio de Janeiro, RJ : s.n.,
2014.
6. Inc, Willian F. Whita International. Specialty Equipment.
7. Cabeças, José Miquel. As Dimensões Antropométricas.
8. Romano, Prof. Dott.Ric. Vitor Ferreira. Projetos de Máquinas I. Rio de Janeiro : s.n.,
2014.
9. [A. do livro] Roberto A. Tenenbaum. Dinâmica Aplicada. Barueri, SP : Manole,
2006.
10. Shockmetais. [Online] Shockmetais. [Citado em: 25 de 11 de 2014.]
http://www.shockmetais.com.br/especificacoes/aluminio/pmec.
11. wikiHow. wikiHow. [Online] [Citado em: 25 de 11 de 2014.]
http://pt.wikihow.com/Soldar-Alum%C3%ADnio.
12. matweb. Matweb. [Online] MatWeb Material Property Data. [Citado em: 26 de 11
de 2014.] http://www.matweb.com/.
13. seetec. Seetec ..see better. [Online] SEETEC Technology. [Citado em: 27 de 11 de
2014.] http://www.seetec.com.cn/en/productlist.asp?sendid=83.
14. Mattedi. Conectores Control Box e Cabeças Remotas.
15. skf.com. SKF The Power of knowledge Engineering. [Online] SKF. [Citado em: 27
de 11 de 2014.] http://www.skf.com/br/products/bearings-units-housings/index.html.
16. Service, SKF. Desmistificando o Monitoramento de Rolamentos em Baixas
Rotações.
17. Capítulo 07 - Mancais de Rolamentos. [A. do livro] UNIP.
18. prestoindustrial.com.br. PRESTO Industrial. [Online] PRESTO Industrial. [Citado
em: 27 de 11 de 2014.] www.prestoindustrial.com.br/produto/sapata-ajustavel-para-
andaime/.
19. servicecaster.com. Service Caster Corporation. [Online] Service Caster
Corporation. [Citado em: 27 de 11 de 2014.] http://www.servicecaster.com/pneumatic-
wheels-casters.php.

75
20. Graphics Cornell. Cornell University - Program of Computer Graphics. [Online]
Cornell University. [Citado em: 24 de 11 de 2014.]
http://www.graphics.cornell.edu/~westin/misc/ISO_12233-reschart.pdf.
21. Techradar. Techradar. [Online] [Citado em: 24 de 11 de 2014.]
http://www.techradar.com/news/photography-video-capture/cameras/camera-testing-
resolution-charts-explained-1027585.
22. CTG clean. John's Corner Technical Blog. [Online] [Citado em: 25 de 11 de 2014.]
http://www.ctgclean.com/tech-blog/wp-content/uploads/Triangle-vs.-Square.ai_-
1024x341.jpg.
23. An Introduction to the Mechanics od Solids. [A. do livro] Stephen H. Crandall.
24. Favorit. [Online] Favorit Aços Especiais. [Citado em: 26 de 11 de 2014.]
http://www.favorit.com.br/sites/default/files/tabelas/acos_para_construcao_mecanica_3.
html.
25. Hurlbutvisuals. [Online] [Citado em: 25 de 11 de 2014.]
www.hurlbutvisuals.com/blog/2013/07/using-a-crane.
26. Imperiodosmetais. [Online] Imperio dos Metais. [Citado em: 26 de 11 de 2014.]
http://www.imperiodosmetais.com.br/aluminio-6061-t6.php.
27. Gerdau. Catálogo de Produtos Comercial Gerdau. 2010.
28. Mattedi. Catalogo Mattedi. s.l. : Mattedi, 2004.
29. Systems, CamMate. Roomer Assembly. RO6000.
30. —. Spec Sheet For Dollies.
31. Products, ABC. ABC Crane 120 Folder.
32. Jib, Jimmy. Jimmy Jib Triangle. 2014.
33. Products, ABC. World of ABC Products. 2013.
34. Technocrane. Price list SUPERTECHNO 30.
35. —. Technodolly Manual.
36. CamMate. Boom Operations Manual.
37. Mattedi. Grua CamMate Travel Series T25.

76
ANEXO A – DESENHOS DE MONTAGEM





























