Embed Size (px)
Citation preview

1
工學碩士學位 請求論文
스파이크 웨이블렛 변환 기법을 이용한
기어 시스템의 건전성 감시
Condition Monitoring in Gear System
Using Spike Wavelet Transform
2 0 0 2 年 2 月
仁荷大學校 大學院
機械工學科(固體 및 生産工學專攻)
沈 章 善

2
工學碩士學位 請求論文
스파이크 웨이블렛 변환 기법을 이용한
기어 시스템의 건전성 감시
Condition Monitoring in Gear System
Using Spike Wavelet Transform
2 0 0 2 年 2 月
指導敎授 李 相 權
이 論文을 碩士學位論文으로 提出함
仁荷大學校 大學院
機械工學科(固體 및 生産工學專攻)
沈 章 善

3
이 論文을 沈章善의 碩士學位論文으로 認定함
2 0 0 2 年 2 月
主審 _______________________
副審 _______________________
委員 _______________________

4
요 약 문
기어 시스템의 충격음과 충격신호는 대개 기어의 결함과 관련이 있다.
그래서 이러한 충격음과 충격신호는 기어 시스템의 건전성 감시의 주요
요소로 사용되어 진다. 본 연구에서는 이런 충격음과 충격 신호를 효율적
으로 추출해 내기 위해 연속 웨이블렛 변환의 확대된 위상 지도를 이용하
는 방법과 스파이크 웨이블렛 변환을 이용하는 방법을 제안하였다.
연속 웨이블렛 변환의 확대된 위상 지도는 기어 진동 신호의 지배적 맞
물림 주파수 및 그 측대역 주파수 성분들에 해당하는 위상 정보만을 제공
함으로써 초기 피팅과 같은 기어의 미세한 결함을 조기에 정확히 탐지할
수 있게한다. 또한 스파이크 웨이블렛 변환은 기존에 제안된 연속 웨이블
렛 변환의 한계점인 임의의 영역에서의 시간-주파수 분해능의 스케일 변
수에 대한 선형성을 보완하여 비 선형적으로 이것을 조절할 수 있게 함으
로써 관심 주파수를 기준으로 연속 웨이블렛 변환보다 고주파 영역에서는
시간 분해능이 향상되어지고 동시에 저주파 영역에서는 주파수 분해능이
향상되어져 기어 결함에 대한 정보 손실 없이 기어의 결함 위치를 보다
명확히 판단할 수 있게한다.

5
ABSTRACT
Impulsive sound and vibration signals in gear system are often associated with
their faults. Thus these impulsive sound and vibration signals can be used as
indicators in condition monitoring in gear system. The traditional amplitude map of
continuous wavelet transform has been used for detection of impulsive signals.
However, it is often difficult to detect minor fault of gear like “initial pitting” and to
identify spikes at high frequency and meshing frequencies at low frequency
simultaneously.
In this paper, the zoomed phase map of continuous wavelet transform and the
spike wavelet transform are developed to extract these impulsive sound and
vibration signals. The zoomed phase map of continuous wavelet transform provides
the phase information associated with only tooth meshing frequency and its
sideband. By using this method the minor fault of gear can be detected quantitatively.
The spike wavelet transform can be used to detect fault position clearly without the
loss of information for the damage of a gear system since the spike wavelet
transform has better time resolution at high frequency and frequency resolution at
low frequency than those of the continuous wavelet transform respectively.

6
목 차
요 약 ···························
························ Ⅰ
ABSTRACT ···························
························· Ⅱ
목 차 ···························
························ Ⅲ
표 및 그림 목록 ·························
····················· 6
제 1 장 서 론 ·····················
··················· 1
제 2 장 이 론 해 석 ···················
················· 3
2.1 연속 웨이블렛 변환(CWT) 이론 ··············
············· 3
2.2 연속 웨이블렛 변환의 시간-주파수 분해능 특성 ······
····· 5
2.3 기어 진동 신호의 위상 변조 ···············
·············· 7
2.4 스파이크 웨이블렛 변화(SWT) 이론 ············
·········· 11
2.5 스파이크 웨이블렛 변화의 시간-주파수 분해능 특성 ····

7
·· 12
제 3 장 실 험 방 법 ···················
················ 14
3.1 실험 장치 및 데이터 수집 과정 ··············
··········· 14
3.2 기어의 결함 형태 및 위치 ················
·············· 16
제 4 장 결 과 및 해 석 ··················
··············· 18
4.1 연속 웨이블렛 변환의 확대된 위상지도를 이용한 결과해석 ·
18
4.2 스파이크 웨이블렛 변환을 이용한 결과 해석 ········
······ 28
제 5 장 결 론 ·····················
·················· 34
참 고 문 헌 ···························
························ 35
표 및 그림 목록
Table 1 Data on the test gear set

8
Fig. 2.1 Morlet wavelet function
Fig. 2.2 Time-frequency resolution of CWT
Fig. 2.3 Time signal of gear vibration
Fig. 2.4 Frequency analysis of time signal (Fig. 2.3)
Fig. 2.5 Dominant meshing frequency and its sidebands
Fig. 2.6 Approximate vibration signal of orginal signal
Fig. 2.7 Phase modulation function of gear vibration
Fig. 2.8 Time-frequency resolution of SWT
Fig. 2.9 Comparison of time-frequency resolution
Fig. 3.1 Schematic diagram of Test Rig for condition monitoring in gear system
Fig. 3.2 Details of gear fault for experiment
Fig. 4.1 CWT amplitude map of healthy gear (750 rpm , 2.94 Nm)
Fig. 4.2 CWT amplitude map of gear with tip breakage (750 rpm , 2.94 Nm)
Fig. 4.3 CWT amplitude map of gear with initial pitting (750 rpm , 2.94 Nm)
Fig. 4.4 CWT phase map of healthy gear (750 rpm , 2.94 Nm)
Fig. 4.5 CWT phase map of gear with initial pitting (750 rpm , 2.94 Nm)
Fig. 4.6 Zoomed phase map of healthy gear (750 rpm , 2.94 Nm)
Fig. 4.7 Zoomed phase map of gear with initial pitting (750 rpm , 2.94 Nm)
Fig. 4.8 Comparison of zoomed phase maps (750 rpm , 2.94 Nm)
Fig. 4.9 Zoomed phase map and phase modulation function of healthy gear

9
Fig. 4.10 Zooming in more detail from Fig. 4.9
Fig. 4.11 Zoomed phase map and phase modulation function of gear with initial
pitting
Fig. 4.12 Zooming in more detail from Fig. 4.11.
Fig. 4.13 Zoomed phase map of gear with initial pitting (950 rpm , 0 Nm)
Fig. 4.14 Zoomed phase map of gear with initial pitting (950 rpm , 1.47Nm)
Fig. 4.15 CWT amplitude map of healthy gear (950 rpm , 1.47 Nm)
Fig. 4.16 CWT amplitude map of gear with tip breakage (950 rpm , 1.47 Nm)
Fig. 4.17 CWT of gear with tip breakage (initial time duration reduced 6 times)
Fig. 4.18 SWT of gear with tip breakage (k = 6 , if = 380 Hz)
Fig. 4.19 SWT of gear with tip breakage (k = 6 , if = 760 Hz)
제 1 장 서 론
자동차, 항공기 등의 수송 기계와 일반 공작 기계의 동력 전달 장치로서 오랜

10
동안 사용 되어온 기어는 중요한 기계 부품으로 인정되어 왔다. 따라서 기어의
결함 진단에 대한 여러 가지 연구가 진행되어 왔다. 이러한 연구의 주요 목적은
기어의 결함을 조기에 발견하여 기계의 손상으로 인한 경제적인 손실과 인명 피
해를 미연에 방지하기 위함이다. 기어의 결함을 진단하는 연구는 주로 기어 시
스템으로부터 측정된 진동 신호에 바탕을 두고 있다. 이러한 진동 신호는 여러
가지 원인으로 인해서 발생되므로 복잡한 형상을 나타낸다. 특히 기어의 지협적
결함(local fault)은 기어 이(齒)의 갑작스러운 강성 변화에 의한 충격파 진동으로
나타나며 이런 충격파 진동은 순간적으로 기어 이(齒)에 걸리는 하중을 변동시
키고 그 위상을 지연시키는 역할을 하게 된다.
기어 시스템의 진동 신호로부터 이런 충격파 신호를 찾아내기 위한 방법으로
시간 평균화 방법[1], Kurtosis 평가[2], Cepstrum 분석[3] 등이 사용되어져 왔다. 특
히 McFadden 에 의한 위상 변조 추출법(phase demodulation)[4]은 충격파에 의한
순간적인 위상 변화를 이용하여 기어의 결함을 진단하는 방법으로 제시되어졌다.
최근 들어서는 디지털 신호 처리 기법의 발전에 힘입어 신호의 주파수 성분들을
시간 축 상에서 전개해 나갈 수 있는 시간-주파수 분석법[5,6], 이산 웨이블렛 변
환(discrete wavelet transform)[7], 연속 웨이블렛 변환(continuous wavelet transform)[8]
등이 이런 충격파를 탐지하는데 이용되어지고 있다. 이 중에서 특히 연속 웨이
블렛 변환은 스케일 변수로써 간단히 다중 시간-주파수 분해능(resolution)을 구현
할 수 있어 기어 시스템의 건전성 감시에 유용하게 사용되어지고 있다[8]. 하지
만 임의의 영역에서의 시간-주파수 분해능의 스케일 변수에 대한 선형성으로 인
해 기어의 결함으로부터 발생되어 지는 충격파와 같은 순간적인 과도적 신호를
찾아내는 데는 한계를 가지고 있으며 초기 피팅과 같이 미세한 결함을 갖는 기

11
어 시스템의 건전성 감시에도 여러가지 어려움을 가지고 있다.
이에 본 연구에서는 이런 문제점을 개선하고자 지배적인 기어 맞물림 주파수
에 해당하는 연속 웨이블렛 변환의 스케일 변수 부분만을 확대하여 위상 변화
간격을 정량적으로 분석할 수 있는 연속 웨이블렛 변환의 확대된 위상 지도를
이용하는 방법[9]과 스파이크 웨이블렛 변환(spike wavelet transform)[10]이라고 명
명한 새로운 방법을 제안하고자 한다. 또한 정상 상태, 상단 절손(tip breakage),
초기 피팅(initial pitting) 형태의 결함을 갖는 기어 시스템의 건전성 감시 실험을
통해 본 연구에서 제시하는 방법들의 타당성 및 유용성을 검증 하고자 한다.
제 2 장 이 론 해 석
2.1 연속 웨이블렛 변환(CWT) 이론

12
입력 신호 )(tx 에 대한 연속 웨이블렛 변환 ),( baCWT 는 다음과 같이 정의 된다.
dta
bttx
abaCWT ∫
∞
∞−
−Ψ= )(
1),( (2.1)
여기서 )(tΨ 는 모(母) 웨이블렛 함수(mother wavelet function)이며, a 는 스케일
변수(scale parameter) b 는 이동 변수(translation parameter) 이다. 스케일 변수 a 는
모(母) 웨이블렛 함수의 기본 구조를 유지 시키면서 그 폭을 확장 또는 압축 시
켜주는 역할을 한다. 즉 시간-주파수 분해능을 결정 시켜주는 변수이며, 이동 변
수 b 는 시간 축 상에서의 모(母) 웨이블렛 함수를 이동 시켜주는 역할을 한다.
각각의 변수 a , b 에 대한 연속 웨이블렛 변환의 계수는 입력 신호 )(tx 와 모
(母) 웨이블렛 함수가 각각 스케일 되어지고 이동 되어진 상태인 웨이블렛 셑들
)/)(( abt −Ψ 과의 교차 상관관계(cross correlation)를 나타낸다. 또한 a/1 은 에너지
평균화(energy normalization)를 위한 항이다.
본 연구에서는 모(母) 웨이블렛 함수로서 변조되어진 가우시안(gaussian) 함수
형태로 명확한 표현이 가능하고 복소수 형태를 가지는 Morlet 웨이블렛 함수를
사용 하였으며 그 기본 웨이블렛 함수는 다음과 같다.
)2exp(2
exp)( 22
tfjtc
t oo π
−=Ψ (2.2)
여기서 of 는 최고 관심 주파수이고 oc 는 Morlet 웨이블렛 함수의 of 에서의 초
기 시간 폭(time duration)과 주파수 대역폭(bandwidth)을 결정해 주는 변수이다.

13
일반적으로 웨이블렛 함수의 효과적인 유지를 위하여 ))2/3364.5/(( πoo fc = 값을 취
하며 Fig. 2.1 과 같은 모양을 갖는다[11]. 따라서 식(2.1)의 연속 웨이블렛 변환은
다음과 같이 쓰여질 수 있다.
dta
btfj
abtc
txa
baCWT oo∫
∞
∞−
−
−−= π2exp
2exp)(
1),(
22
(2.3)
Fig. 2.1 Morlet wavelet function
또한 웨이블렛 함수 )(tΨ 가 복소수 형태의 값을 가지므로 연속 웨이블렛 변환
의 계수 ),( baCWT 또한 복소수 형태의 값을 갖게 된다. 따라서 연속 웨이블렛
변환은 시간-주파수 축 상에서 입력 신호 )(tx 의 진폭 지도(amplitude map)와 위
상 지도(phase map)를 가지게 되며 이 두 가지 정보들은 기어 결함 진단에 효과
적으로 이용되어질 수 있다. 특히 본 연구에서는 초기 피팅과 같이 탐지가 곤란

14
한 기어의 미세한 결함을 조기에 탐지하기 위한 목적으로 연속 웨이블렛 변환의
확대된 위상 지도를 이용하는 방법을 제시하고자 한다.
2.2 연속 웨이블렛 변환의 시간-주파수 분해능 특성
연속 웨이블렛 변환의 시간-주파수 분해능은 기본 웨이블렛 함수의 시간 폭,
주파수 대역폭과 스케일 변수a 에 의해서 결정되어 진다. 임의의 시간 t , 주파수
f 에서의 연속 웨이블렛 변환의 시간-주파수 분해능은 다음과 같이 정의되어 진
다.
otat ∆⋅=∆ af
fo∆=∆ (2.4)
여기서 ot∆ 와 of∆ 는 기본 웨이블렛 함수의 초기 시간 폭과 주파수 대역폭을
나타내며 t∆ 와 f∆ 는 임의의 영역에서의 시간 폭과 주파수 대역폭을 의미한다.
연속 웨이블렛 변환의 시간-주파수 분해능의 한 예를 보여주고 있는 Fig. 2.2 와
식(2.4) 에서 알 수 있듯이 임의의 영역에서의 시간 폭은 스케일 변수 a 값에 선
형적으로 비례하고 주파수 대역폭은 선형적으로 반비례함을 알 수 있다. 물론
저주파 영역에서는 주파수 분해능이 좋고 고주파 영역에서는 시간 분해능 이 좋

15
Fig. 2.2 Time-frequency resolution of CWT
은 특성을 가지고 있지만 이런 시간-주파수 분해능의 선형성은 기어의 결함으로
부터 발생되어지는 충격파와 같은 순간적인 과도적 신호를 탐지하는 데는 한계
성을 내포하고 있다. 즉 과도적 신호의 고주파 성분을 정확히 탐지하기 위해 기
본 웨이블렛 함수의 초기 시간 폭 ot∆ 를 짧게 하면 초기 주파수 대역폭 of∆ 는
길어지게 되고 시간-주파수 분해능의 선형성에 의해 저주파 영역에서의 주파수
분해능이 나빠지는 한계를 가지게 된다. 본 연구에서는 이런 문제점의 대안으로
스파이크 웨이블렛 변환(SWT)이라고 명명한 새로운 방법을 제안하고자 한다.

16
2.3 기어 진동 신호의 위상 변조
일정한 하중과 속도 하에서 이상적으로 제조된 기어의 진동 신호 )(tx 는 기본
맞물림 주파수(fundamental tooth meshing frequency ; mf )와 그 하모닉(harmonic)성분
들의 합으로 나타낼 수 있다.
( )∑=
Φ+=N
n
nmn tnfXtx0
2cos)( π (2.5)
여기서 nX 은 각 성분들의 진폭이고 nΦ 은 그때의 위상을 나타낸다. 기어가 지
협적 결함을 가지면 기어 이(齒) 주변에 강성 변화를 유발 시킨다. 이런 변화는
진폭 변조 함수 )(ta 와 위상 변조 함수 )(tb 로써 표현 되어질 수 있다. 이와 같
이 변조 되어진 기어의 진동 신호 )(ty 는 다음과 같이 표현 되어진다.
( ) ( )∑=
+Φ++=N
n
nnmnn tbtnftaXty0
)(2cos)(1)( π (2.6)
여기서 지배적인 하모닉 성분과 그 주위의 측대역(sideband) 성분들로써 변조
되어진 기어의 진동 신호를 근사적으로 표현할 수 있다. 이 근사적 진동 신호를
)(tzn 이라 하면 )(tzn 는 다음과 같이 표현 되어질 수 있다.
( ) ( ))(2cos)(1)( tbtnftaXtz nnmnnn +Φ++≅ π (2.7)
다음으로 근사적인 진동 신호 )(tzn 의 해석적 신호(analytic signal)를 이용하여
위상 변조 함수 )(tbn 를 구할 수 있다. 이 해석적 신호 )(tcn 는 다음과 같다.

17
( ))()()( tzjHtztc nnn += ( ) ( )( ))(2exp)(1 tbtnfjtaX nnmnn +Φ++= π (2.8)
여기서 ( ))(tzH n 는 근사적인 진동 신호 )(tzn 의 Hilbert 변환이다. 식(2.8)로 부터
위상 변조 함수 )(tbn 는 다음과 같이 얻어진다[4].
( ) ( )nmnn tnftctb Φ+−= π2)(arg)( (2.9)
Fig. 2.3 ~ Fig. 2.7 은 실제 기어 진동 신호에서 위상 변조 함수를 구하는 과정
을 한 예로서 도시한 그림이다. 이렇게 구해진 위상 변조 함수(Fig. 2.7)를 통하여
기어의 결함 유무 및 위치를 파악할 수 있다.
Fig. 2.3 Time signal of gear vibration

18
Fig. 2.4 Frequency analysis of time signal (Fig. 2.3)
Fig. 2.5 Dominant meshing frequency and its sidebands

19
Fig. 2.6 Approximate vibration signal of orginal signal
Fig. 2.7 Phase modulation function of gear vibration

20
2.4 스파이크 웨이블렛 변화(SWT) 이론
입력 신호 )( tx 에 대한 스파이크 웨이블렛 변환 ),( baSWT 는 다음과 같이 정의된
다.
dta
btfj
abtc
txa
baSWT odd ∫
∞
∞−++
−
−−= π2exp
2exp)(
1),(
2
)1(
2
)1( (2.10)
여기서 a 와 b 는 스케일 변수와 이동 변수를 나타내고 of 는 최고 관심 주파
수이다. 또한 c 는 기본 웨이블렛 함수의 of 에서의 초기 폭을 결정해주는 변수로
다음과 같이 정의된다.
ockc ⋅= (2.11)
여기서 oc 는 연속 웨이블렛 변환에서 일반적으로 사용 되어지는 ))2/3364.5/(( πoo fc =
값이고 k 는 그때의 초기 시간 폭의 축소율을 나타내주는 변수이다. 즉 k 가 2
이면 최고 관심 주파수 of 에서의 기본 웨이블렛 함수의 초기 시간 폭을 연속 웨
이블렛 변환의 2 배로 축소한다는 것을 의미한다. 또한 식(2.10)에서 d 는 스케일
변수 a 에 대한 시간-주파수 분해능을 비선형적으로 변화시켜주는 변수이며 스
파이크 웨이블렛 변환에서 이 d 값을 선정하는 이 매우 중요한 요소이다. 본 연
구에서는 시간-주파수 분해능을 유지시키고자 하는 영역, 즉 관심 주파수
(frequency of interest) if 에 대한 d 값을 선정하는 방법을 다음과 같이 제안하고자
한다.
( )( )io ff
kd
lnln= (2.12)

21
식(2.12)는 관심 주파수 if 에서 시간-주파수 분해능을 연속 웨이블렛 변환과
동일하게 함으로써, 즉 식(2.3)과 식(2.10)에서 동일한 스케일 변수 a )/( io ff= 에
대한 모(母) 웨이블렛 함수의 시간 폭과 주파수 대역폭을 같게 함으로써 구해질
수 있다.
2.5 스파이크 웨이블렛 변화의 시간-주파수 분해능 특성
임의의 시간 t , 주파수 f 에서의 스파이크 웨이블렛 변환의 시간-주파수 분해
능은 식(2.10)으로부터 다음과 같이 구해 진다.
( )o
d tat ∆⋅=∆ +1 ( )d
o
af
f+
∆=∆1
(2.13)
Fig. 2.8 Time-frequency resolution of SWT

22
여기서 ot∆ 와 of∆ 는 기본 웨이블렛 함수의 초기 시간 폭과 주파수 대역폭을
나타내며 t∆ 와 f∆ 는 임의의 영역에서의 시간 폭과 주파수 대역폭을 의미한다.
스파이크 웨이블렛 변환의 시간-주파수 분해능의 한 예를 보여주고 있는 Fig. 2.8
과 식(2.13)에 의하면 임의의 영역에서의 시간 폭과 주파수 대역폭은 변수 d 의
영향으로 스케일 변수 a 값에 비선형적으로 변함을 알 수 있다. Fig. 2.9 는 연속
웨이블렛 변환과 스파이크 웨이블렛 변환의 시간-주파수 분해능을 비교하여 도
시한 그림이다. 그림에서 보면 알 수 있듯이 스파이크 웨이블렛 변환에서는 관
심 주파수 if 를 기준으로 고주파 영역에서는 시간 분해능이 향상되었고 동시에
저주파 영역에서는 주파수 분해능이 향상됨을 알 수 있다. 이와 같은 특성은 스
파이크 웨이블렛 변환으로써 기어의 결함으로부터 발생되어지는 충격파와 같은
과도적 신호의 고주파 성분을 저주파 영역의 정보 손실 없이 정확히 탐지할 수
있게 해준다.
Fig. 2.9 Comparison of time-frequency resolution

23
제 3 장 실험 방법
3.1 실험 장치 및 데이터 수집 과정
본 연구에서 사용되어진 기어 시스템의 건전성 감시를 위한 실험 장치의 개략
도가 Fig. 3.1 에 도시 되어져 있다. 본 실험장치는 0.75 KW 의 MSS-080M DC
모터와 SCM 재질의 M3-24 입력 축 평기어(spur gear)와 같은 재질의 M3-25 출력
축 평기어 한 쌍으로 구성되어 있으며 기어 시스템에 토크 부하(torque load)를
가해주기 위해 출력 축에 NKPB-1.2Y 파우더 브레이크(powder break)를 사용하였
다. 이 파우더 브레이크는 실험 장치에 추가적인 진동을 유발시키지 않고 안정
적인 에너지 소산을 시킬 수 있는 장치이다. 본 실험 장치에서 입력 축 회전
속도는 DC 모터에 연결되어진 DC 속도 조절기(DC speed controller)로써 조절이 가
능하고 파우더 브레이크에 연결되어진 DC 토크 부하 조절기(DC torque load
controller)로써 기어 시스템에 가해주는 토크 부하를 결정할 수 있다.
본 실험에서는 750 rpm 의 입력 축 회전 속도와 2.94 Nm 의 토크 부하 상태
그리고 950 rpm 의 입력 축 회전 속도와 1.47 Nm 의 토크 부하 상태에서 실험을
수행하였다. 또한 결함을 갖는 기어를 입력 축 기어로 하였으며 이에 의한 진동
신호를 얻기 위해 가장 근접해 있는 베어링 하우징(bearing housing) 상단에 가속
도계(accelerometer ; B&K 4366)를 부착하였다. 기어 축 한 회전 당의 기준 펄스
신호(pulse signal)를 얻기 위해 입력 축 상의 커플링(coupling)에 있는 키(key) 고
정용 구멍(hole)을 이용하여 간극 센서(gap sensor ; AEC-55MS-M)로부터 상대적인
기준 펄스 신호를 얻었다. 이렇게 얻어진 기어의 진동 신호와 기준 신호를 각각

24
Fig. 3.1 Schematic diagram of Test Rig for condition monitoring in gear system

25
Table 1 Data on the test gear set
구 분 모듈 잇수 (개)
피치원직경 (mm)
이나비 (mm)
이두께 (mm)
Pinion 3 24 72 30 4.71
Gear 3 25 75 30 4.71
증폭기(amplifier)를 통하여 증폭 시키고 DAQ 보드(BNC-2090)를 이용하여 펄스
신호를 기준으로 기어의 진동 신호를 트리거(trigger) 하였다. 이 트리거 되어진
신호들을 동시 시간 평균화(synchronous time average ; STA) 하여 기어축 한 회전
에 대한 기어 시스템의 진동 신호를 얻었다.
3.2 기어의 결함 형태 및 위치
기어의 지협적 결함 형태 중 가장 일반적이고 중요한 형태는 치면 피로
(surface fatigue)에 의한 피팅 파손과 굽힘 피로(bending fatigue)에 의한 절손 파손
이다[12].
피팅 파손은 치면의 접촉응력이 재료의 피로 한도를 넘었을 때에 반복 하중에
의해 치면 또는 내부에 미세한 균열이 발생하여 거기서 작은 조각이 탈락하고
치면에 웅덩이를 만드는 손상으로 기어 의 피치선(pitch line) 바로 아래 부분에서
파손이 시작되는 특징이 있다. 절손 파손은 순간적인 과부하(overload) 또는 구조
물의 부적절한 설치(misalignment), 베어링 파손, 큰 이물질의 침투 등으로 인한
굽힘 피로의 누적으로 비교적 큰 금속편이 치면으로부터 박리하는 손상으로 조
립이나 제조 과정 등에서도 발생될 수 있다.

26
(a) Healthy (b) Initial Pitting (c) Tip Breakage
Fig. 3.2 Details of gear fault for experiment
Fig. 3.2 는 본 실험에서 사용되어진 정상 기어와 지협적 결함을 갖는 기어의
형상을 나타내고 있다. Fig. 3.2 의 (b)는 비교적 미세한 결함 형태인 초기 피팅을
갖는 기어를 실험용으로 제작한 것으로 피치선 바로 아래 부분에 이 두께(tooth
thickness)의 20%를 줄(file)로써 갈아주었다. 또한 (c)는 비교적 큰 결함 형태인
상단 절손을 갖는 기어를 나타낸 것으로 기어 작용 높이(working depth)의 25%를
줄로써 제거해주었다. 이와 같은 결함을 가지는 기어를 전체 24 개중 14 번째에
위치 시켜 기어 시스템의 건전성 감시 실험을 실시 하였다.

27
제 4 장 결과 및 해석
4.1 연속 웨이블렛 변환의 확대된 위상지도를 이용한 결과 해석
기어의 결함 진단을 위해 Fig. 3.2에서 제시한 3 가지 경우에 대해 동일한 조건
하에서 실험을 실시하였다. 가속도계로부터 나오는 진동 신호와 기준 펄스 신
호를 이용하여 기어축 한 회전 당 동시 시간 평균화 되어진 시간 신호를 추출
하였으며 이 신호를 이용하여 식(2.3)에 제시되어진 연속 웨이블렛 변환을 구현
하였다. 본 연구에서 사용되어진 최고 관심 주파수 of 는 2692 Hz 이며 스케일
변수 a 는 1 부터 12 까지 0.5 의 증분을 사용하였다. 또한 연속 웨이블렛 변환 결
과의 참고 자료로 활용하기 위해 시간 신호의 푸리에 변환(fourier transform)을 수
행하여 주파수 분포를 알아보았다. Fig. 4.1 ~ Fig. 4.3은 750 rpm 의 입력 축 회전
속도와 2.94 Nm 의 토크 부하 실험 조건에서의 정상 상태, 상단 절손, 초기 피팅
의 경우에 대한 연속 웨이블렛 변환의 진폭 지도를 나타내고 있다.
Fig. 4.1 을 보면 기어 진동 신호 대부분의 에너지는 기본 맞물림 주파수의 3 번
째 하모닉 성분인 900 Hz 부근에 집중되어 있음을 알 수 있다. 또한 Fig. 4.2 는
비교적 큰 결함 형태인 상단 절손을 갖는 기어의 경우로 200o ~ 225o 부근에서
결함이 있음을 탐지할 수 있다. 이는 본 실험에서 결함 위치로 지정한 14 번째
기어의 위치(195o ~ 210o)를 비교적 잘 탐지하고 있다. 하지만 Fig. 4.3와 같이 미
세한 결함 형태 중 하나인 초기 피팅을 갖는 기어의 경우에서는 결함의 유무를
정확히 판단 하기가 곤란하다. 따라서 본 연구에서는 연속 웨이블렛 변환의 확
대된 위상 지도를 이용하여 기어의 미세한 결함을 탐지할 수 있는 방법을 제안

28
Fig. 4.1 CWT amplitude map of healthy gear (750 rpm , 2.94 Nm)
Fig. 4.2 CWT amplitude map of gear with tip breakage (750 rpm , 2.94 Nm)

29
Fig. 4.3 CWT amplitude map of gear with initial pitting (750 rpm , 2.94 Nm)
하고자 한다.
지협적인 기어의 결함은 기어 이(齒)의 강성을 변화시켜 순간적인 위상 변화
를 유발시키며 결국은 이상적인 기어 진동 신호의 위상을 변조시키게 된다. 이
런 위상 변조는 맞물림 주파수의 측 대역 주파수 성분들의 변화로 나타나며 지
배적 맞물림 주파수와 그 영역의 측 대역 주파수 성분들을 분석함으로써 지협
적 기어 결함에 의한 위상 변조를 탐지할 수 있다.
Fig. 4.4 와 Fig. 4.5는 각각 정상 상태의 기어와 초기 피팅을 갖는 기어의 경우
에 대한 연속 웨이블렛 변환의 위상 지도를 나타내고 있다. 연속 웨이블렛 변환
의 위상 지도는 기어의 기본 맞물림 주파수에서는 기어 잇수 만큼의 위상 변화
를 나타내고 그 하모닉 성분에서는 잇수의 정수배 만큼의 위상 변화를 보여주고

30
Fig. 4.4 CWT phase map of healthy gear (750 rpm , 2.94 Nm)
Fig. 4.5 CWT phase map of gear with initial pitting (750 rpm , 2.94 Nm)

31
있다. 정상 상태의 경우는 비교적 위상 변화의 폭이 일정함을 알 수 있으나 초
기 피팅의 경우는 보다 정량적으로 분석할 필요성이 있음을 알 수 있다.
Fig. 4.6 ~ Fig. 4.8은 지배적 맞물림 주파수인 기본 맞물림 주파수의 3 번째 하모
닉 성분, 즉 900 Hz 에 해당되는 연속 웨이블렛 변환의 스케일 변수 a 를 기준으
로 주위의 스케일 변수와 독립적인 주파수 범위를 각 경우에 대해 Fig. 4.4 와
Fig. 4.5 로부터 확대하여 도시한 그림이다. 또한 이때의 연속 웨이블렛 변환의
계수들로부터 위상 변화폭의 간격을 정량적으로 계산한 결과를 함께 도시하였다.
Fig. 4.8 을 보면 정상 상태의 기어는 위상이 등 간격으로 변하고 있는 반면 미
세한 결함 형태인 초기 피팅을 갖는 기어의 경우는 200o 부근에서 등 간격의 폭
이 현저하게 증가됨을 볼 수 있다. 이는 지협적 결함을 갖는 기어가 일시적인
Fig. 4.6 Zoomed phase map of healthy gear (750 rpm , 2.94 Nm)

32
Fig. 4.7 Zoomed phase map of gear with initial pitting (750 rpm , 2.94 Nm)
Fig. 4.8 Comparison of zoomed phase maps (750 rpm , 2.94 Nm)

33
강성 변화를 일으켜 순간적인 위상 지연(phase lag) 현상을 나타내고 있음을 명확
히 보여주고 있다. 또한 이는 본 실험에서 결함 위치로 지정한 14 번째 기어의
위치(195o ~ 210o)와도 정확히 일치함을 알 수 있다.
다음으로 기어의 미세한 결함을 탐지하기 위한 방법으로 본 연구에서 제시한
연속 웨이블렛 변환의 확대된 위상 지도를 이용하는 방법의 타당성을 검토하기
위해 McFadden 이 제시한 Hilbert 변환을 이용한 위상 변조 추출법(2.3 절)의 결
과와 본 연구의 결과를 비교하여 Fig. 4.9 ~ Fig. 4.12 에 도시하였다.
Fig. 4.9 와 Fig. 4.10 은 정상 상태 기어의 위상 변조를 나타내고 있다. 연속 웨
이블렛 변환의 확대된 위상 지도에서 알 수 있었듯이 위상이 거의 일정하게 변
화고 있음을 위상 변조 추출법을 통해 확인할 수 있다. 또한 Fig. 4.11 과 Fig.
4.12 는 초기 피팅을 갖는 기어의 위상 변조를 나타내고 있다. 이 경우에도 미세
한 결함에 의한 위상 지연의 위치로 CWT 의 확대된 위상 지도로부터 찾은 200o
부근에서 명확한 위상 변화를 일으킴을 위상 변조 추출법을 통해 확인할 수 있
다. 참고로 위상 변조 추출법은 좋은 결과에 비해 많은 신호 처리 과정을 요구
한다. 즉 주어진 시간 신호를 주파수 분석후 지배적 맞물림 주파수 및 그 측대
역 주파수 성분들을 필터링 해야 하며, 필터링되어진 신호의 해석적 신호
(analytic signal)를 구해 이 해석적 신호의 위상(phase)에서 지배적 맞물림 주파수
의 정확한 위상을 빼주어야 하는 복잡한 과정이 필요하다. 특히 필터링 과정에
서 위상 정보에 유의해야 하며 지배적 맞물림 주파수의 위상 정보를 정확히 구
해야 하는 어려움이 있다. 반면에 연속 웨이블렛 변환의 확대된 위상 지도를
이용하는 방법의 경우는 주어진 시간 신호에 대해 연속 웨이블렛 변환을 취한후
확대하는 작업만 하면 되기 때문에 비교적 간단한 신호 처리 과정을 갖는다.

34
Fig. 4.9 Zoomed phase map and phase modulation function of healthy gear
Fig. 4.10 Zooming in more detail from Fig. 4.9

35
Fig. 4.11 Zoomed phase map and phase modulation function of gear with initial pitting
Fig. 4.12 Zooming in more detail from Fig. 4.11.

36
Fig. 4.13 Zoomed phase map of gear with initial pitting (950 rpm , 0 Nm)
Fig. 4.14 Zoomed phase map of gear with initial pitting (950 rpm , 1.47Nm)

37
또한 본 연구의 객관성을 검증하기 위해서 동일한 초기 피팅 결함에 대한 다
른 회전 속도와 토크 부하에서의 연속 웨이블렛 변환의 확대된 위상 지도 결과
를 Fig. 4.13 과 Fig. 4.14 에 도시하였다. 위 결과들로부터 본 연구에서 제시한 연
속 웨이블렛 변환의 확대된 위상 지도를 이용하는 기어 결함 진단 방법은 초기
피팅과 같이 미세한 결함을 가지는 기어 시스템의 건전성 감시에 유용성이 있음
을 알 수 있다.
4.2 스파이크 웨이블렛 변환을 이용한 결과 해석
Fig. 4.15 는 950 rpm 의 입력 축 회전 속도와 1.47 Nm 의 토크 부하 실험 조건
에서의 정상 상태 기어에 대한 연속 웨이블렛 변환의 진폭 지도를 나타내고 있
다. 그림에서와 같이 기어 시스템으로부터 나오는 진동 신호의 대부분의 에너지
는 기어의 기본 맞물림 주파수의 2 번째 하모닉(harmonic) 성분인 760 Hz 부근에
집중되어 있으며 기본적으로 기어 시스템이 가지고 있는 진폭변조(amplitude
modulation)와 위상변조(phase modulation)에 의해 진동 신호가 변조되어 있음을
알 수 있다.
다음으로 Fig. 4.16 은 950 rpm 의 입력 축 회전 속도와 1.47 Nm 의 크 부하 실
험 조건에서의 상단 절손을 갖는 기어에 대한 연속 웨이블렛 변환의 진폭 지도
를 보여주고 있다. 지협적인 결함 형태 중 하나인 상단 절손을 갖는 기어의 경
우 이(齒) 부분이 맞물림 할 때 순간적으로 주위의 강성을 변화시켜 충격파를
유발하게 된다. 이런 충격파는 순간적인 과도적 신호이기 때문에 넓은 주파수
영역에 걸친 신호의 왜곡(distortion) 현상이 발생하게 된다. Fig. 4.16 과 같이 상단
절손을 갖는 기어의 경우 200o ~ 225o 부근에서 결함의 유무를 탐지할 수 있는

38
Fig. 4.15 CWT amplitude map of healthy gear (950 rpm , 1.47 Nm)
Fig. 4.16 CWT amplitude map of gear with tip breakage (950 rpm , 1.47 Nm)
39
신호의 왜곡 현상을 볼 수 있다. 이는 본 실험에서 결함의 위치로 지정한 14 번
째 기어의 위치(195o ~ 210o)에 근접함을 알 수 있다. 또한 2번째 하모닉 주파수
성분이 명확히 보이며 기본 맞물림 주파수 성분도 어렴풋이 나타나고 있다. 이
는 연속 웨이블렛 변환의 진폭 지도가 신호의 주파수 성분들을 시간 축 상에서
전개해 나갈 수 있는 시간-주파수 분석법의 하나로서 유용하게 사용되어질 수
있음을 보여주고 있다.
하지만 연속 웨이블렛 변환은 충격파의 위치를 정확히 탐지하기에는 시간 분
해능의 한계를 가지고 있다. 이는 2.2 절에서도 언급한바 있는 시간-주파수 분해
능의 스케일 변수 a 에 대한 선형성 때문이다. 즉 연속 웨이블렛 변환에서 기본
웨이블렛 함수의 초기 시간 폭과 주파수 대역폭이 결정되면 이 선형성에 의해
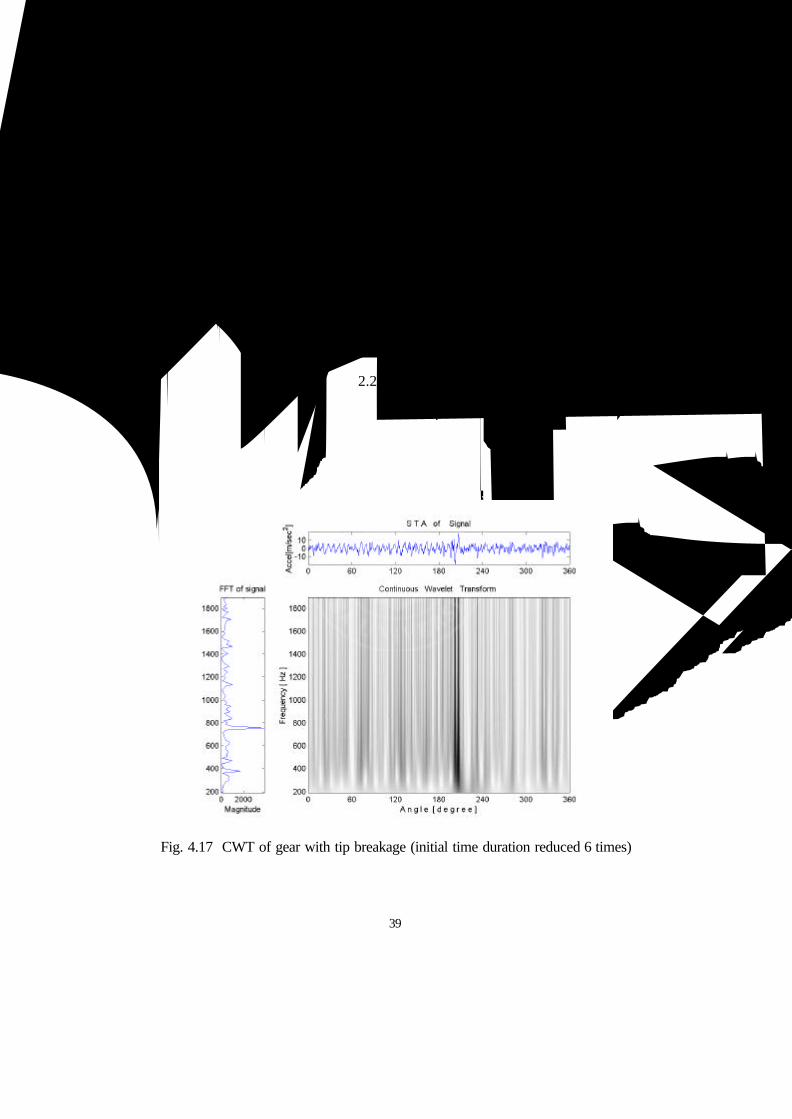
Fig. 4.17 CWT of gear with tip breakage (initial time duration reduced 6 times)

40
임의의 영역에서의 시간-주파수 분해능이 정해지게 된다.(식(2.4)) 한 예로서 Fig.
4.16 에서 적용된 기본 웨이블렛 함수의 초기 시간 폭을 6 배로 축소 했을 경우
의 연속 웨이블렛 변환의 결과를 Fig. 4.17 에 나타내었다. Fig. 4.17 을 보면 고주
파 영역에서의 시간 분해능이 상당히 향상되어 충격파의 위치를 명확히 탐지할
수 있지만 상대적으로 저주파 영역에서의 주파수 분해능이 매우 나빠져 저주파
영역의 주파수 정보들을 잃게 되는 한계를 가지게 된다.
따라서 이런 연속 웨이블렛 변환의 한계에 대한 대안으로서 본 연구에서는 스
파이크 웨이블렛 변환을 제시하게 되었다. 우선 기본 웨이블렛 함수의 초기 시
간 폭을 결정해주는 변수인 k 를 6 으로 하고 시간-주파수 분해능을 유지시키고
자 하는 영역, 즉 관심 주파수 if 를 기본 맞물림 주파수 380 Hz 로 하였을 경우
의 스파이크 웨이블렛 변환의 결과를 Fig. 4.18 에 나타내었다. 그림을 보면 관심
주파수 if 인 기본 맞물림 주파수 에서의 시간-주파수 분해능이 유지되면서 그 이
상의 고주파 영역에서의 시간 분해능이 좋아짐을 알 수 있다. 하지만 상대적으
로 2 번째 하모닉 주파수 성분의 주파수 분해능이 나빠져서 그 성분을 잘 표현
하지 못하고 있다. 이에 관심 주파수 if 를 2 번째 하모닉 성분인 760 Hz 로 취하
여 그 결과를 Fig. 4.19 에 도시하였다.
Fig. 4.19 를 Fig. 4.16 의 연속 웨이블렛 변환과 비교해 보면 관심 주파수 if 로
정한 2 번째 하모닉 성분에서의 시간-주파수 분해능은 유지되면서 그 이상의 고
주파 영역에서는 시간 분해능이 좋아지고 동시에 그 이하의 저주파 영역에서는
주파수 분해능이 좋아짐을 알 수 있다. Fig. 4.19 에서 볼 수 있듯이 스파이크 웨
이블렛 변환을 이용했을 때 기어의 결함의 위치를 보다 명확히 알 수 있다. 203o
~ 207o 에서 충격파에 의한 넓은 주파수 범위의 왜곡 현상이 명확히 나타나며 이

41
Fig. 4.18 SWT of gear with tip breakage ( k = 6 , if = 380 Hz)
Fig. 4.19 SWT of gear with tip breakage ( k = 6 , if = 760 Hz)

42
는 본 실험에서 결함의 위치로 지정한 14 번째 기어의 위치(195o ~ 210o)를 정확히
탐지하고 있다. 또한 저주파 영역의 기본 맞물림 주파수 성분이 보다 명확히 나
타나고 있는데 이는 정상 상태보다 결함을 갖는 경우의 기본 맞물림 주파수가
명확해지고 있는 특성(Fig. 4.15 , Fig. 4.16)을 보다 잘 표현하고 있다. 위 결과들로
부터 스파이크 웨이블렛 변환은 적절한 k 값과 d 값을 선택함으로써 일정한 하
모닉 주파수 성분들과 기어 결함에 의한 과도적 충격파 신호를 동시에 가지고
있는 기어 시스템의 건전성 감시에 유용성이 있음을 알 수 있으며 계산 시간에
있어서도 연속 웨이블렛 변환과 흡사한 시간을 보여 주었다.
43
제 5 장 결 론
기어 시스템의 건전성 감시 방법으로서 본 연구에서는 연속 웨이블렛 변환의
확대된 위상 지도를 이용하는 방법과 스파이크 웨이블렛 변환을 이용하는 방법
을 제안 하였다. 연속 웨이블렛 변환의 확대된 위상 지도는 기어 진동 신호의
지배적 맞물림 주파수 및 그 측대역 주파수 성분들에 해당하는 위상 정보만을
제공하여 기어 이(齒)의 일시적 강성 변화에 의한 순간적인 위상 지연 현상을
탐지할 수 있게 한다. 본 연구에서는 이를 통해 초기 피팅과 같이 탐지가 곤란
했던 기어의 미세한 결함을 조기에 정확히 탐지할 수 있었다. 또한 스파이크 웨
이블렛 변환은 기존에 제안되어진 연속 웨이블렛 변환의 한계점인 임의의 영역
에서의 시간-주파수 분해능의 스케일 변수에 대한 선형성을 보완하여 비선형적
으로 이것을 조절할 수 있게 하였다. 그 결과 관심 주파수를 기준으로 연속 웨
이블렛 변환 보다 고주파 영역에서는 시간 분해능이 향상되었고 동시에 저주파
영역에서는 주파수 분해능이 향상되어서 기어의 결함 위치를 보다 명확히 판단
할 수 있었다.
정상 상태, 초기 피팅, 상단 절손을 갖는 기어에 대한 건전성 감시 실험을 통
해 일정한 하모닉 주파수 성분들과 기어 결함에 의한 과도적 충격파 신호를 동
시에 가지고 있는 기어 시스템의 건전성 감시에 있어 본 연구에서 제시한 연속
웨이블렛 변환의 확대된 위상 지도와 스파이크 웨이블렛 변환이 탁월한 유용성
이 있음을 검증할 수 있었다.

44
참 고 문 헌
[1] Stewart, R. M., 1977, “Some Useful Data Analysis Techniques for Gearbox
Diagnostics,” Institude of Sound and Vibration Research, University of Southampton,
Report MHM/R/10/77.
[2] Dyer, D. and Stewart, R. M., 1978, “Detection of Rolling Element Bearing Damage by
Statistical Vibration Analysis,” Journal of Mechanical Design, Transactions of ASME,
Vol. 100, No. 2, pp. 229~235.
[3] Randall, R., 1982, “Cepstrum Analysis and Gearbox Fault Detection,” B&K
Application Note, Technical Report, pp. 13~150.
[4] McFadden, P. D., 1986, “Detecting Fatigue Cracks in Gears by Amplitude and Phase
Demodulation of Meshing Vibration,” Journal of Vibration Acoustics Stress and
Reliability in Design, Transactions of ASME, Vol. 108, pp. 165~170.
[5] Lee, S. K. and White, P. R., 1997, “Higher-Order Time-Frequency Analysis and Its
Application to Fault Detection in Rotating Machinery,” Mechanical Systems and Signal
Processing, Vol. 11, No. 4, pp. 637~650.
[6] Lee, S. K. and White, P. R., 1999, “Two-Stage Adaptive Line Enhancer and Sliced
Wigner Trispectrum for the Characterization of Faults from Gear Box Vibration Data,”
Journal of Vibration Acoustics, Transactions of ASME, Vol. 121, pp. 488~494.
[7] Wang, W. J. and McFadden, P. D., 1995, “Application of Orthogonal Wavelets to
Early Gear Damage Detection,” Mechanical Systems and Signal Processing, Vol. 9, No.
5, pp. 497~507.
[8] Boulahbal, D. Golnaraghi, M. F. and Ismail, F., 1999, “Amplitude and Phase Wavelet
Maps for The Detection of Cracks in Geared Systems,” Mechanical Systems and Signal

45
Processing, Vol. 13, No. 3, pp. 423~436.
[9] 이상권, 심장선, 2001, “연속 웨이블렛 변환의 확대된 위상 지도를 이용한 기
어의 초기 피팅 결함 진단,” 대한 기계 학회 논문집 A , 제 25 권, 제 11 호,
pp. 1759~1766.
[10] 이상권, 심장선, 2001, “스파이크 웨이블렛 변환을 이용한 기어 시스템의 건
전성 감시,” 한국음향학회지, 제 20 권, 제 5 호, pp. 21~27.
[11] Daubechies, I., 1992, “Ten Lectures on Wavelets,” Society for Industrial and Applied
Mathematics, pp. 76~80.
[12] 小泉晋, 1995, “기어와 호브반 작업,” 기전 연구사, pp. 237~247.



![20 열역학 제2법칙optics.hanyang.ac.kr/~choh/degree/[2013-2] general... · 2016. 8. 29. · 26.1 키르히호프의 규칙 회로의 각 성분에 걸리는 퍼텐셜차와 전류의](https://img.pdfslide.tips/doc/110x75/5fd8f0f5ba1da46ef64999c3/20-oe2e-chohdegree2013-2-general-2016-8-29-261-e.jpg)







![구조물의 파손과 하중 종류 제1장 · 2019-01-14 · (b) 전지가위를 이용한 나뭇가지 정리 그림 1.5 전단 하중 구조물 예[출처:Shutterstock] 하중을](https://img.pdfslide.tips/doc/110x75/5e2a59002ffdc748e5539d95/ee-oeoee-e-oe1-2019-01-14-b-eoee-oe.jpg)




