Embed Size (px)
DESCRIPTION
:B
Citation preview
UNIVERSIDAD NACIONAL DEL CALLAO
Sintonía de Controladores PID
26/09/2014
INTEGRANTES:
Mahr Calle Renzo Arturo Fernando
Príncipe Fernández Jose Antonio
Chinchay Rivera Jherson Emerson
Calderon Chávez Felix
Sintonía de Controladores PID 2014
Sintonia de Controladores PID
1. INTRODUCCION:
La sintonía de controladores por el método de Ziegler-Nichols y otras se han usado ampliamente para sintonizar controladores PID en sistemas de control de procesos en los que no se conoce con precisión la dinámica de la planta. Durante muchos años tales reglas de sintonía han demostrado ser muy útiles. Por supuesto, las reglas de sintonía de Ziegler-Nichols se pueden aplicar a plantas cuya dinámica se conoce (Conociendo la función de transferencia).
2. OBJETIVO:
Diseñar e implementar un controlador PID de tal manera que mejore la performance del sistema de segundo orden; es decir mejore la respuesta en el tiempo.
3. MATERIALES:
Computadora. Software “Matlab”.
4. PROCEDIMIENTO:
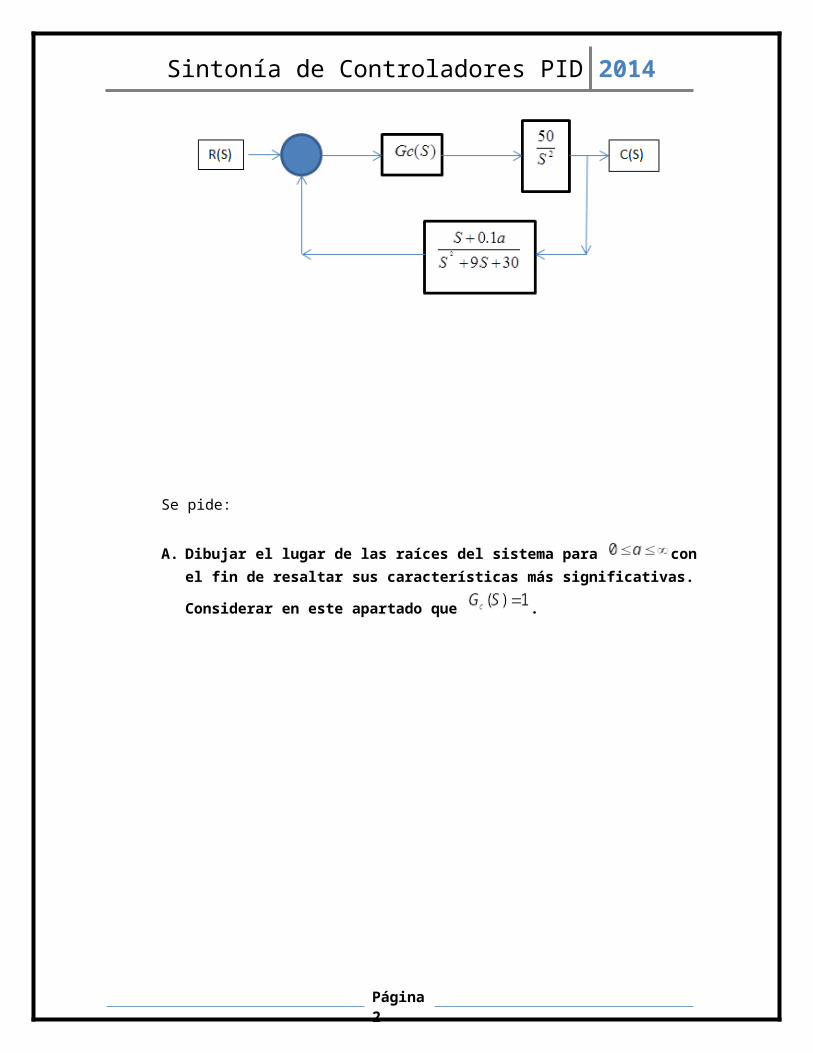
Se pide diseñar el controlador para una planta dada e implementar el sistema de control a compensar. La figura representa un sistema de realimentación negativa de lazo simple.
Página 1
Sintonía de Controladores PID 2014
Se pide:
A. Dibujar el lugar de las raíces del sistema para con el fin de resaltar sus características más significativas. Considerar en este
apartado que .
Página 2
Sintonía de Controladores PID 2014
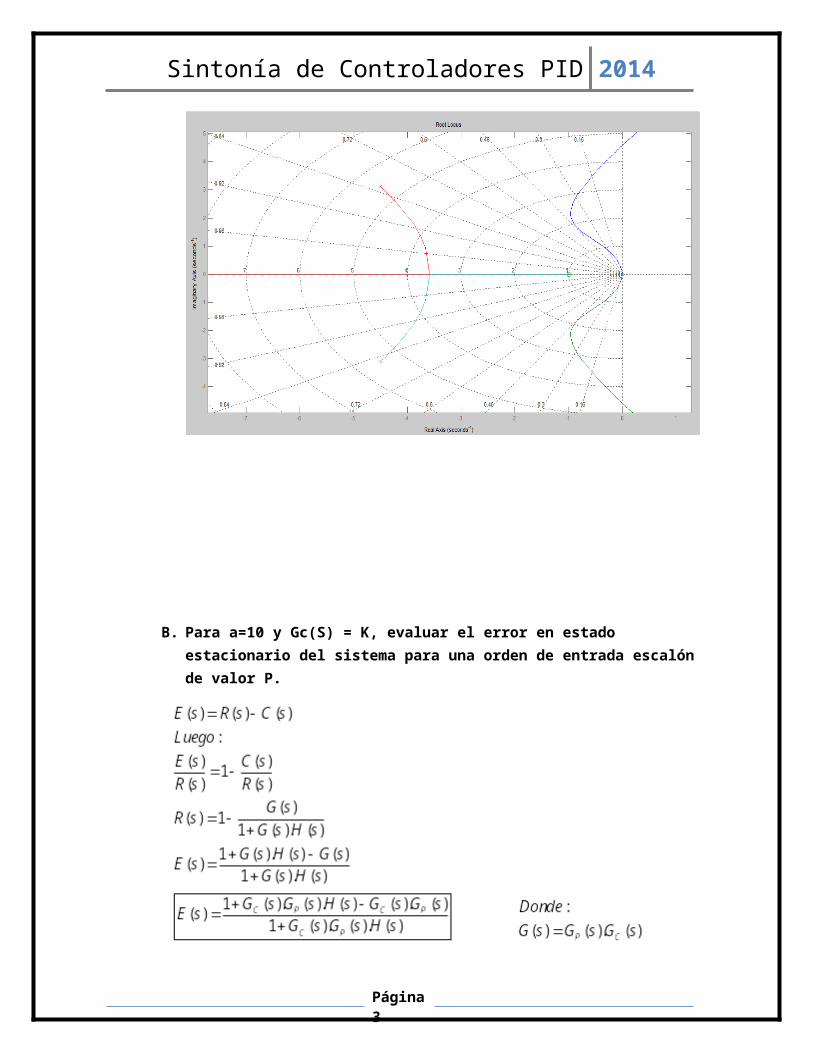
B. Para a=10 y Gc(S) = K, evaluar el error en estado estacionario del sistema para una orden de entrada escalón de valor P.
Y la entrada de escalón P es
Reemplazando:
Aplicando el límite:
Página 3

Sintonía de Controladores PID 2014
Como podemos observar el valor negativo indica que el error de estado estacionario hace que la salida este por encima del valor ideal, esto se puede corregir aumentado integradores al sistema de control.
C. Empleando el segundo criterio de Ziegler Nichols y considerando a=10, diseñar el controlador Gc(s) con estructura PID más adecuado para el sistema.
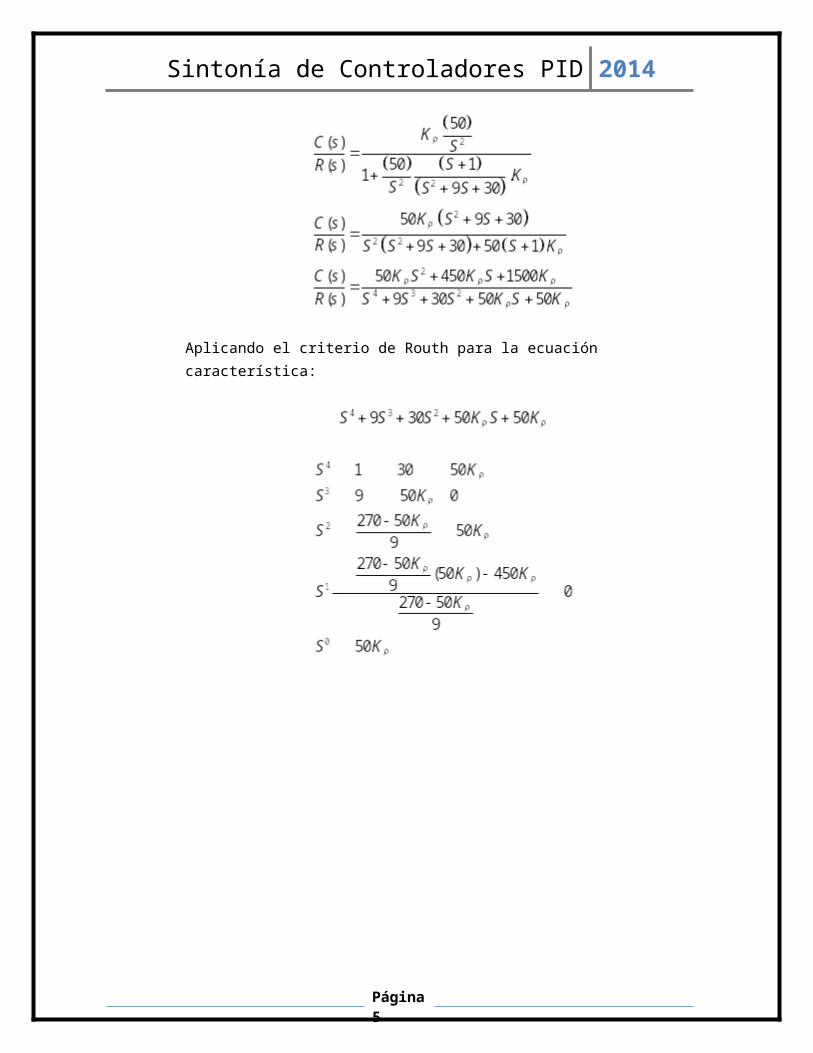
De la función de transferencia:
Aplicando el criterio de Routh para la ecuación característica:
Página 4
Sintonía de Controladores PID 2014
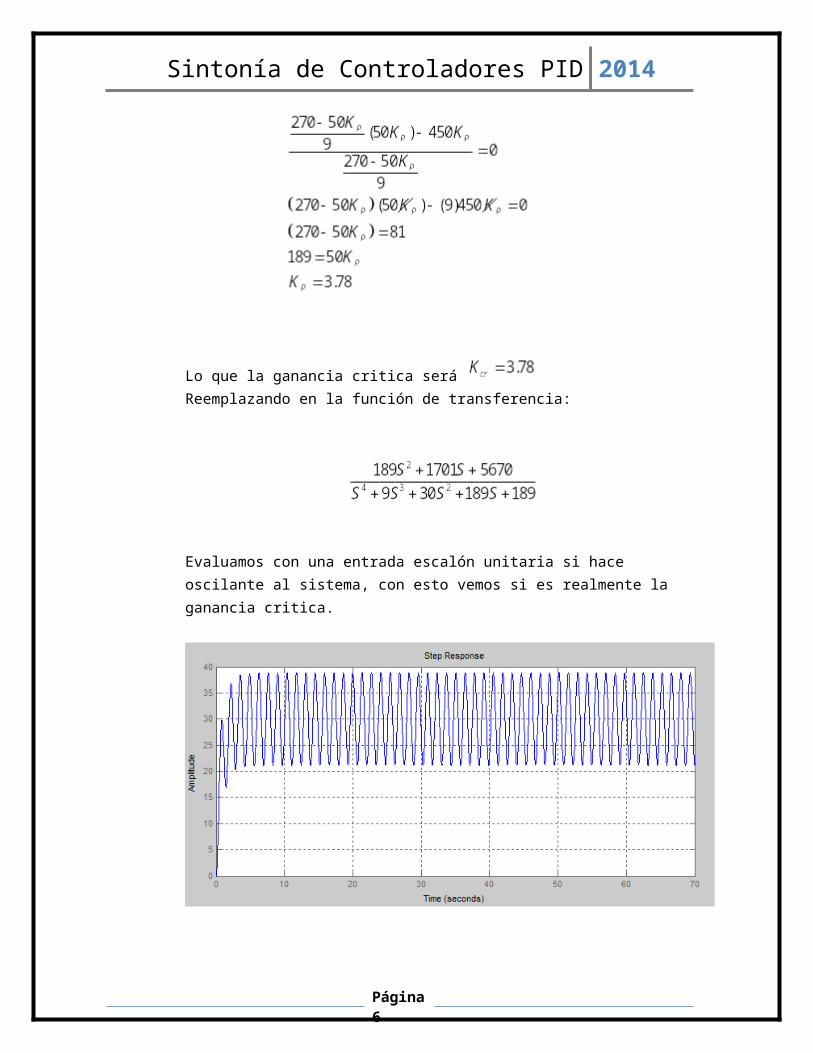
Lo que la ganancia critica será Reemplazando en la función de transferencia:
Evaluamos con una entrada escalón unitaria si hace oscilante al sistema, con esto vemos si es realmente la ganancia critica.
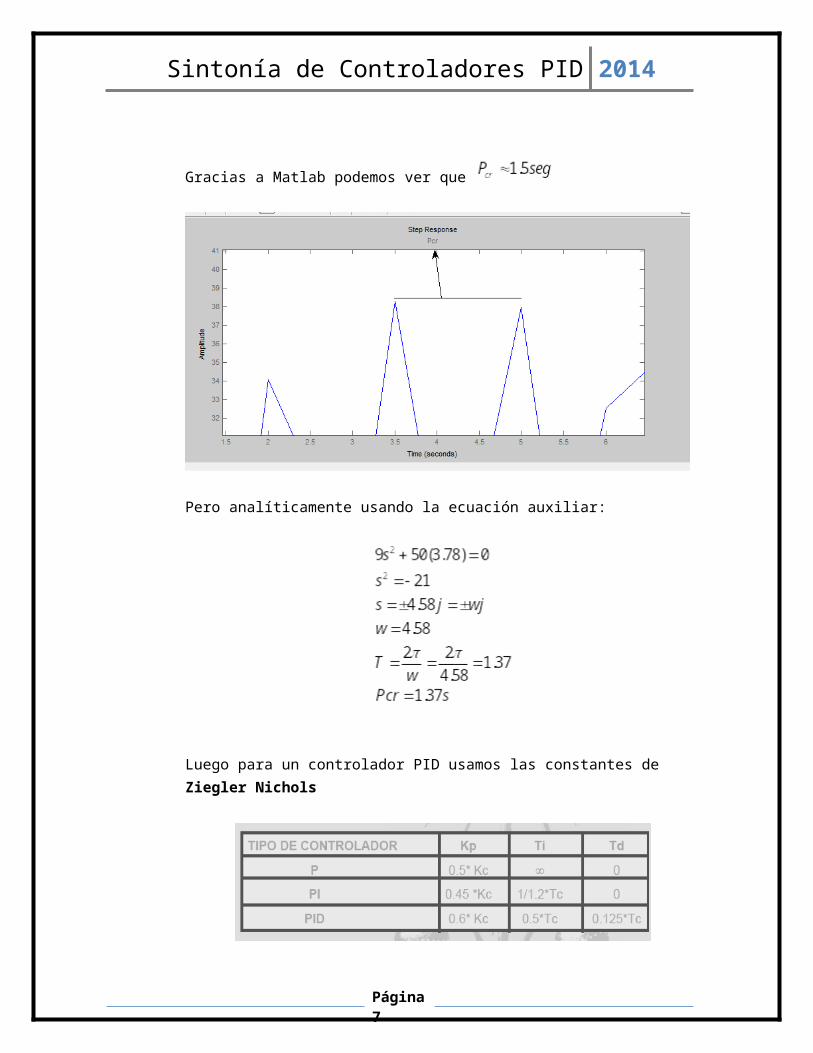
Gracias a Matlab podemos ver que
Página 5
Sintonía de Controladores PID 2014
Pero analíticamente usando la ecuación auxiliar:
Luego para un controlador PID usamos las constantes de Ziegler Nichols
Página 6
Sintonía de Controladores PID 2014
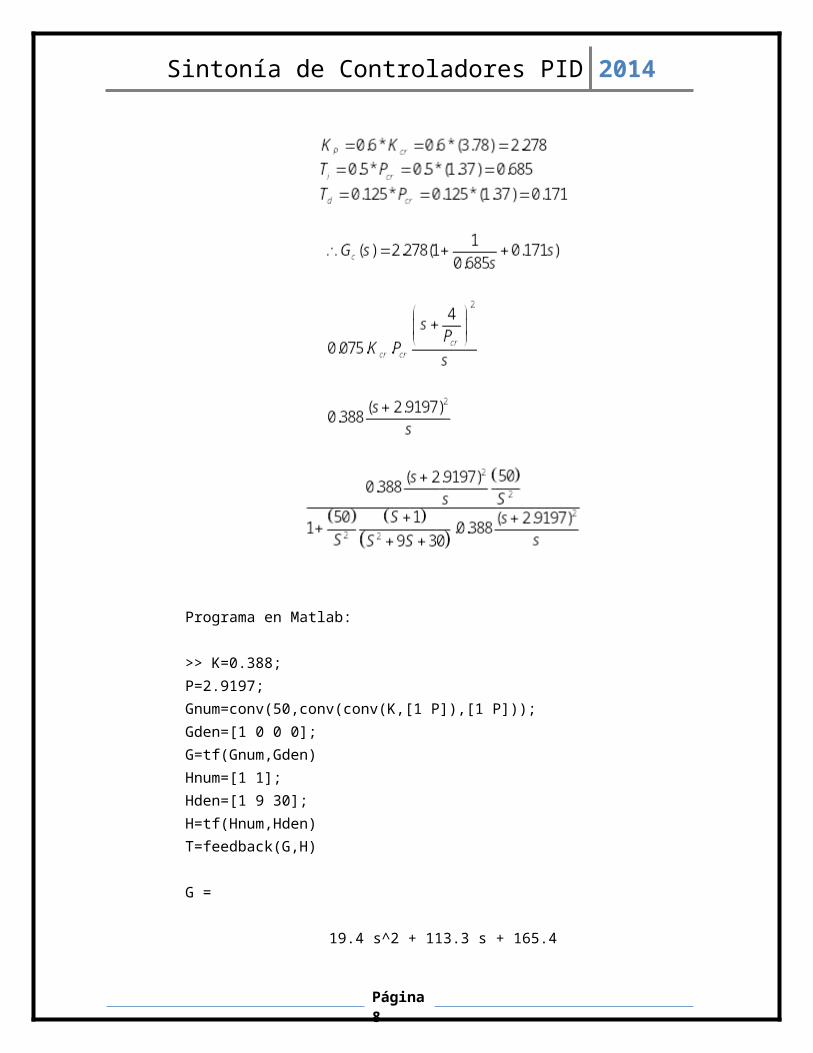
Programa en Matlab:
>> K=0.388;P=2.9197;Gnum=conv(50,conv(conv(K,[1 P]),[1 P]));Gden=[1 0 0 0];G=tf(Gnum,Gden)Hnum=[1 1];Hden=[1 9 30];H=tf(Hnum,Hden)T=feedback(G,H)
G =
19.4 s^2 + 113.3 s + 165.4--------------------------
s^3
H =
s + 1--------------
s^2 + 9 s + 30
Página 7
Sintonía de Controladores PID 2014
T =
19.4 s^4 + 287.9 s^3 + 1767 s^2 + 4887 s + 4961----------------------------------------------------
s^5 + 9 s^4 + 49.4 s^3 + 132.7 s^2 + 278.7 s + 165.4
>> step(T)>> D=zpk(T)
D =
19.4 (s+2.92)^2 (s^2 + 9s + 30)--------------------------------------------------------
(s+0.8379) (s^2 + 1.828s + 8.963) (s^2 + 6.334s + 22.02)
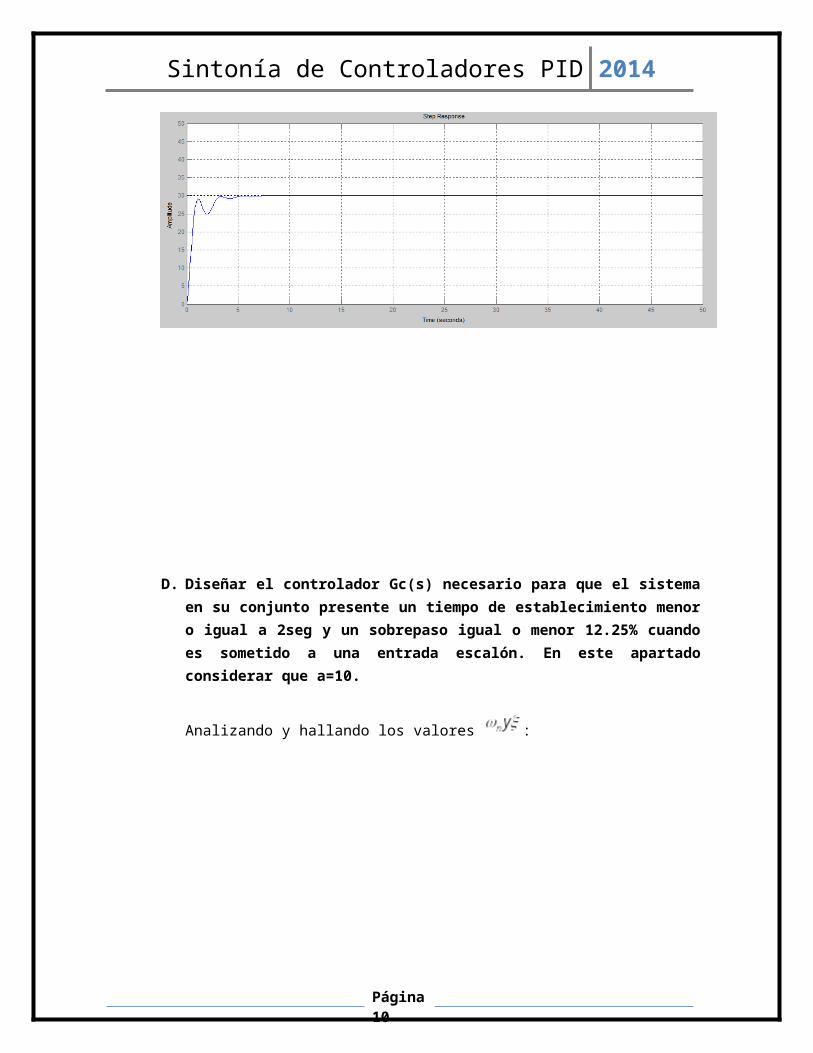
Respuesta escalón con nuestra nueva función usando el segundo método de Ziegler Nichols:
Página 8
Sintonía de Controladores PID 2014
D. Diseñar el controlador Gc(s) necesario para que el sistema en su conjunto presente un tiempo de establecimiento menor o igual a 2seg y un sobrepaso igual o menor 12.25% cuando es sometido a una entrada escalón. En este apartado considerar que a=10.
Analizando y hallando los valores :
Ahora utilizando Matlab veremos en qué regiones para nuestro controlador se cumple lo pedido en el ejercicio:
Página 9
Sintonía de Controladores PID 2014
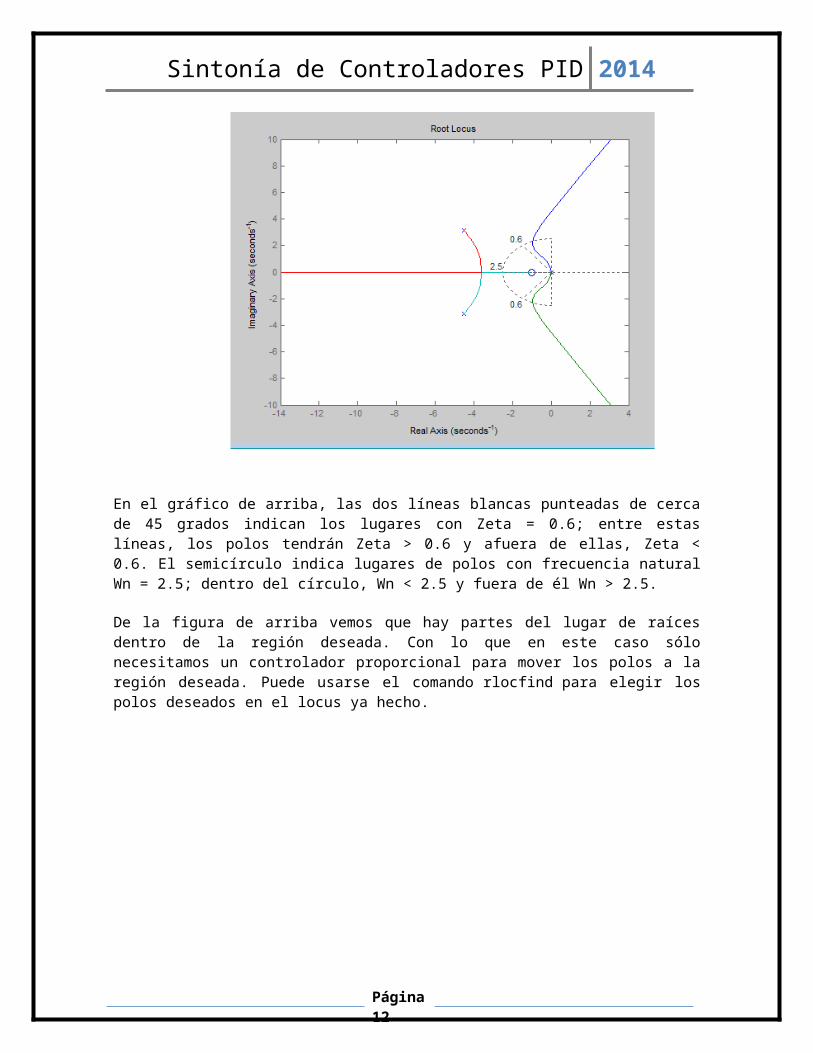
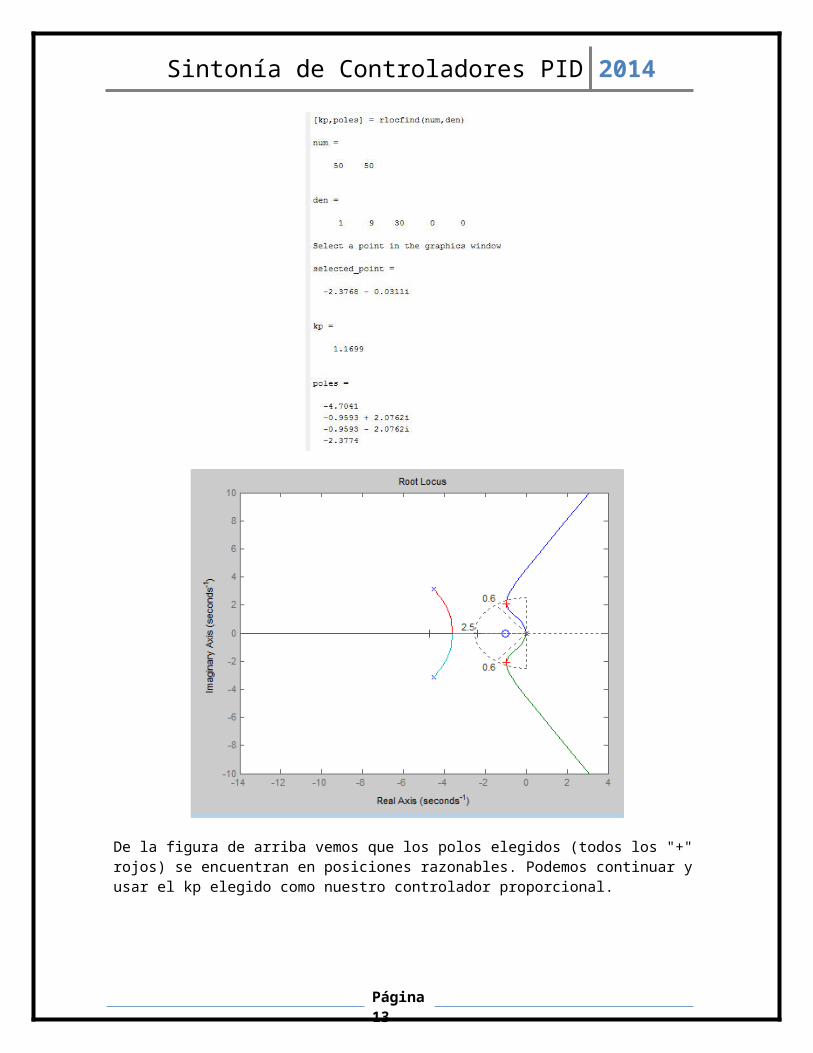
En el gráfico de arriba, las dos líneas blancas punteadas de cerca de 45 grados indican los lugares con Zeta = 0.6; entre estas líneas, los polos tendrán Zeta > 0.6 y afuera de ellas, Zeta < 0.6. El semicírculo indica lugares de polos con frecuencia natural Wn = 2.5; dentro del círculo, Wn < 2.5 y fuera de él Wn > 2.5.
De la figura de arriba vemos que hay partes del lugar de raíces dentro de la región deseada. Con lo que en este caso sólo necesitamos un controlador proporcional para mover los polos a la región deseada. Puede usarse el comando rlocfind para elegir los polos deseados en el locus ya hecho.
Página 10
Sintonía de Controladores PID 2014
De la figura de arriba vemos que los polos elegidos (todos los "+" rojos) se encuentran en posiciones razonables. Podemos continuar y usar el kp elegido como nuestro controlador proporcional.
Página 11
Sintonía de Controladores PID 2014
E. Sintonice la salida (varié los parámetros del PID) hasta lograr una respuesta aceptable ante un escalón unitario.
Del apartado c podemos tomamos los valores para variarlos:
Programa en Matlab con lo cual mejoramos el tiempo de respuesta aumentado la ganancia y moviendo los ceros:
K=2.9;
P=0.6;
Gnum=conv(50,conv(conv(K,[1 P]),[1 P]));
Gden=[1 0 0 0];
G=tf(Gnum,Gden)
Hnum=[1 1];
Hden=[1 9 30];
H=tf(Hnum,Hden)
T=feedback(G,H)
F=tf(T);
D=zpk(T)
step(T);
v=[0 50 0 50];
axis(v)
grid
Página 12
Sintonía de Controladores PID 2014
G =
145 s^2 + 174 s + 52.2
----------------------
s^3
H =
s + 1
--------------
s^2 + 9 s + 30
T =
145 s^4 + 1479 s^3 + 5968 s^2 + 5690 s + 1566
------------------------------------------------
s^5 + 9 s^4 + 175 s^3 + 319 s^2 + 226.2 s + 52.2
D =
145 (s+0.6)^2 (s^2 + 9s + 30)
------------------------------------------------------
(s+0.4365) (s^2 + 1.494s + 0.7476) (s^2 + 7.07s + 160)
Página 13
Sintonía de Controladores PID 2014
Entonces los parámetros serán:
Página 14





























