Embed Size (px)
DESCRIPTION
Regulación primaria y regulación secundaria, Maquinas térmicas sin recalentamiento, Regulador de tensión, Maquinas operando en paralelo en una misma área de control
Citation preview
Universidad Nacional del Este
Facultad Politécnica
Control y Estabilidad
Profesor:
Ing. Luis María Fernández
Alumnos:
Rodrigo David López López
Eduardo Arístides Flecha Rodas
9no Semestre
Noviembre-2014

ÍNDICE
Introducción……………………………………………………………………………………1
Dos máquinas térmicas sin recalentamiento con regulación primaria…………….2 al 9
Dos máquinas térmicas sin recalentamiento, una con regulación secundaria y otra con
regulación primaria…………………………………………………………………….10 al 15
Tres unidades en paralelo en una misma área de control………………………...16 y 17
Tres unidades en paralelo en una misma área de control (Modelo vissim)…….18 al 22
Regulador de Tensión………………………………………………………………...23 al 29
Conclusión……………………………………………………………………………………30

1
INTRODUCCIÓN
Las unidades generadoras son dotadas de mecanismos de regulación
automática, que actúan en el sentido de elevar o reducir la potencia de la unidad,
cuando la velocidad (o frecuencia) se aleja de la velocidad referencia.
Esta regulación automática ejercida por los reguladores de velocidad de las
máquinas del sistema es denominada: Regulación Primaria, en esta regulación se
puede observar que el control de la frecuencia es hecho a través de variaciones de
potencia activa de la máquina.
La Regulación Primaria actúa sin la acción del CAG y logra llegar a un equilibrio,
pero la frecuencia no vuelve a su valor nominal, siendo el nuevo valor hallado menor o
mayor a la nominal, dependiendo de la variación de carga.
Viendo la necesidad de controlar la variación de frecuencia y hacer tender a cero
dicha variación, se incorpora al sistema, el control integrador KI, que da origen a un
error estático nulo de la frecuencia, es decir, logrando que el error de la frecuencia sea
cero en régimen permanente. Este tipo de regulación se lo conoce como Regulación
Secundaria, en el cual la variación de la frecuencia es cero luego de que exista una
variación de carga y el sistema se haya estabilizado, logrando el equilibrio, o sea,
haciendo que la potencia generada sea igual a la potencia de demanda (la carga).
En este trabajo simularemos ambos tipos de regulación, estudiando así su
amortiguación, su tiempo de estabilidad, su oscilación, la cantidad de carga absorbida
entre otros temas.

2
TEMA 1 - Trabajo Practico N° 3
Dos máquinas térmicas sin recalentamiento que operan en paralelo en la misma
área de control con los siguientes datos: Tg = 0.05 seg., Tt = 1.5 seg. Una máquina
(A) posee estatismo de 3 % (frecuencia nominal = 50 Hz) y la otra máquina posee
estatismo = 6 %, conforme se indica en el diseño en VISSIM:
La función de transferencia del Sistema de Potencia es la indicada en el diseño. Considere que el área de control posee “Regulación primaria”. Responda a las siguientes preguntas:

3
a- Identifique en el diseño, los lazos del RV + Turbina de la maquina A y B y también identifique el lazo que correspondiente al estatismo.

4
b- Identifique la entrada de la variación de la carga, y la función de
transferencia del Sistema de Potencia con sus respectivas constantes de
tiempo.
100( )
1 10 1
p
p
p
KG s
sT s
Función de transferencia del sistema de potencia
100p
HzK
pu Ganancia estática del sistema
10pT seg Constante de tiempo del área

5
c- Monte el referido diseño en el simulador VISSIM y calcule la ganancia del
estatismo para cada máquina, identificando sus magnitudes (Hz, pu, etc)
1 20,666666667
3% 1 3.(50 )
100%
mA
pu puG
Hz HzHz
pu
1 10,3333333333
6% 1 3.(50 )
100%
mB
pu puG
Hz HzHz
pu

6
d- Calcule (de acuerdo al gráfico) aproximadamente, cuanto p.u. cada
máquina absorbe y responda a que se debe esta diferencia, considerando
que ambos generadores son idénticos.
En este ejemplo se asumió un aumento de la carga en 10% (ΔP=0,1pu)
Del gráfico tenemos que:
- La máquina A absorbe 0,0664pu
- La máquina B absorbe 0,0336pu
Asumiendo un aumento de la carga igual a 0,1pu; podemos ver que la máquina A
absorbe lo equivalente a 0,0664pu y la máquina B absorbe una carga de 0,0336pu.
Por más que ambos generadores sean idénticos, la causa de la diferencia de absorción
de carga de uno con otro es el estatismo. Por teoría sabemos que cuanto menos sea el
estatismo de la máquina, mayor será la absorción de carga de la misma, y como la
máquina A posee menor estatismo (3%) absorbe mayormente la variación de la carga,
generando más potencia para lograr el equilibrio entre la generación y la demanda
(Pg=Pd).

7
e- Observe la oscilación de potencia de ambas maquinas e interprete el
porqué de estas oscilaciones. ¿Cuál maquina se estabiliza más
rápidamente?
Las oscilaciones de potencia en ambas máquinas ocurren debido a la perturbación que
existe en el sistema (aumento de la carga). Podemos observar en la figura que la
máquina A con menor estatismo (3%) oscila más y con mayor amplitud que la máquina
B con mayor estatismo (6%). Esto sucede porque la máquina A es más sensible a la
variación de la carga haciendo que su potencia generada oscile mucho más y tarde
más tiempo en estabilizarse, es decir, la máquina B se estabiliza más rápido por ser
menos sensible a la variación de la carga.

8
f- ¿Cuál es el valor final de Δf,stat después del efecto dinámico?
El valor del error de la frecuencia después del efecto dinámico es Δfstat = - 0,098537Hz,
resulta un valor negativo debido a que ocurrió un aumento en la carga.
g- Separe las maquinas A y B eléctricamente asumiendo que ambas
pertenecen a diferentes áreas de control. Considerar que el “sumador”
donde es conectada la potencia de salida de la turbina es independiente en
este caso. Realice estas modificaciones en el diseño del VISSIM. Responda
a las mismas preguntas de a – f, y compare los resultados. Saque sus
conclusiones.

9
Asumiendo un aumento de la carga igual a 0,1pu; la máquina A con menor estatismo
toma la carga de 0,0984 pu; y mientras que la máquina B absorbe 0,0968 pu.
Como hay una máquina en cada sistema, cada máquina debe absorber toda la
variación de carga que sufra el sistema para llegar a un punto de equilibrio. Esta
pequeña diferencia que se puede observar entre la carga absorbida por ambas
máquinas se debe a que la máquina A con menor estatismo (3%) es más sensible a la
variación de carga.
Se puede observar en la figura de las potencias que la máquina A es mucho más
sensible a la variación de la carga por tener menor estatismo y en consecuencia oscila
más. Sin embargo la máquina B se estabiliza más rápido por tener mayor estatismo y
por ser menos sensible a la variación ocurrida en el sistema.
El valor del error de frecuencia después del efecto dinámico para la máquina A es
-0,147769Hz y para la máquina B con mayor estatismo es -0,291264Hz.
El valor final de la variación de frecuencia de la máquina A es menor porque ésta
máquina es más sensible a la variación de la carga y por ende absorbe más carga
logrando acercarse más al punto de equilibrio entre la generación y la demanda
(Pg=Pd) comparando con la máquina B.
10
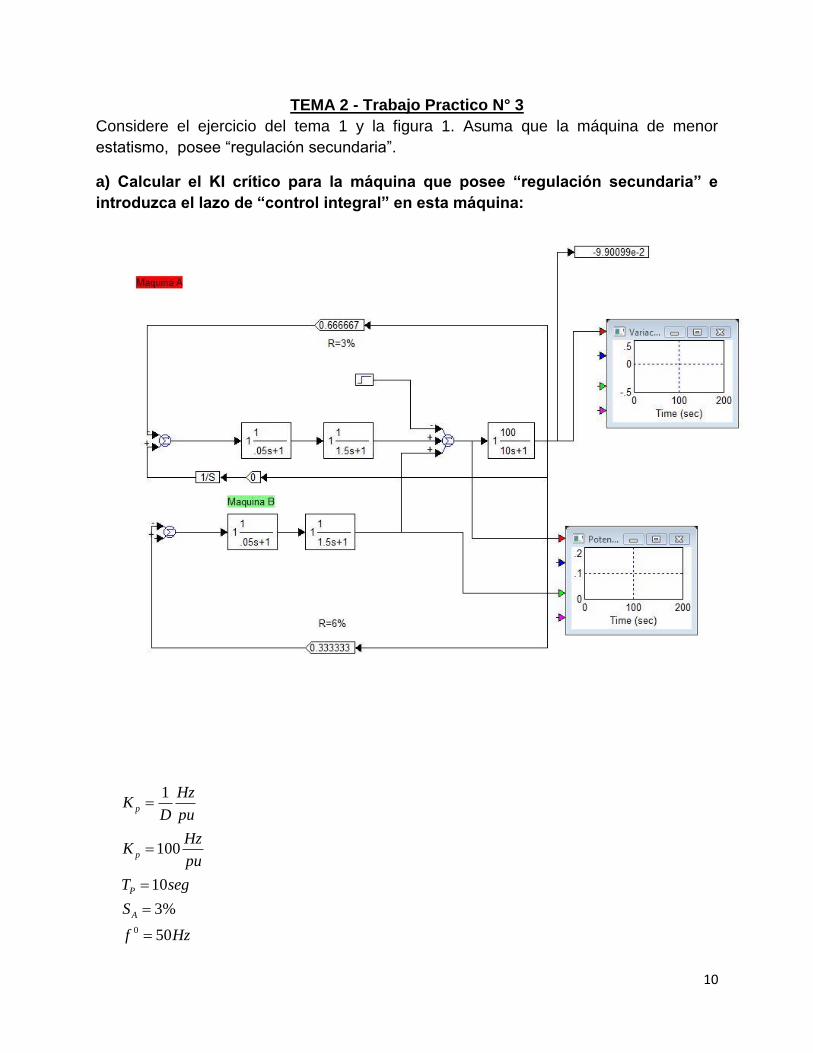
TEMA 2 - Trabajo Practico N° 3
Considere el ejercicio del tema 1 y la figura 1. Asuma que la máquina de menor
estatismo, posee “regulación secundaria”.
a) Calcular el KI crítico para la máquina que posee “regulación secundaria” e
introduzca el lazo de “control integral” en esta máquina:
0
1
100
10
3%
50
p
p
P
A
HzK
D pu
HzK
pu
T seg
S
f Hz
RV
Turbina

11
0
0
0
1 1 1
100100
3% 1. .50 1,5
100%
110 .50 .. .2 100 2,5
. 2 2
p
A A
p
p
puD
HzK Hz
pu
HzR S f Hz
pu pu
puseg HzT f DH HzT H seg
f D
2
,
2
,
2 2.(2,5 ) 5
1 1 1 1 1( ) .( )
4 4(
0
5
,023
) 100 1,5
I cri
c t
t
I ri
M H seg seg
pu puK D
M R seg Hz Hz
K

12
b) Simule y observe lo que ocurre con el “error de frecuencia” en régimen
permanente. ¿Porque la frecuencia posee este “error de frecuencia”?
Como le introdujimos el lazo de control integral (KI) a la máquina A de menor estatismo (3%), el error de
frecuencia Δfstat=0, pues ésta máquina ahora opera con regulación secundaria.
En regulación secundaria se logra que la frecuencia alcance nuevamente su valor nominal en régimen
permanente luego del disturbio (Pd).

13
c- Se pretende aumentar la amortiguación de la oscilación de frecuencia. Realice
las modificaciones necesarias para aumentar dicha amortiguación y simule.
Marque la casilla “overplot” y cambie el color de la curva en el PLOTTER para
comparar los resultados.
Para lograr un aumento en la amortiguación de la frecuencia el valor de KI<KIcritico. Para simular se
asume el valor de KI=0,013.
Cuanto menor sea el valor de KI con respecto a KIcritico, mayor será el amortiguamiento de la
frecuencia y menor la oscilación de la misma; haciendo que pueda estabilizarse más rápidamente, pero
no siendo tan preciso el valor de Δfstat, es decir no tiende a cero absoluto.
Si el sistema es muy amortiguado puede caer en la situación en el que el error no sea nulo.
En la figura se puede observar que la curva verde (KI<KIcritico) oscila menos, pero el error no tiende al
cero absoluto.

14
d) ¿Qué ocurrirá con el “error de frecuencia” en régimen permanente si el valor
de KI tiende a cero? ¿Cuál sería este valor si KI = 0? ¿Qué tipo de regulación es
esta?
Si el valor de KI tiende a cero, la frecuencia no volverá a su valor nominal, sino que se
logrará el equilibrio en un valor diferente del valor nominal. El error de frecuencia para
este caso es 0,0990099statf Hz cuando KI=0.
Cuando KI tiende a cero se trata de una regulación primaria en donde la frecuencia no
vuelve a su valor nominal.

15
e) ¿Cuál es el comportamiento de la oscilación, si el KI > KI,critico? Variar el valor
de KI discretamente hasta obtener los resultados.
Cuando KI es mayor con respecto a KIcritico, la frecuencia tiene un menor
amortiguamiento y por ende mayores oscilaciones haciendo que se demore más
tiempo para alcanzar su estabilidad.
Se puede observar en la figura la sobre posición de las cuatro curvas, la curva rosada
representa (KI=0.05>KIcritico), pudiéndose notar que dicha curva es la que posee
mayor oscilación, haciendo que el sistema sea más estable.

16
TEMA 5 - Trabajo Practico N° 3
Considerar el siguiente diagrama. Asumir que la frecuencia nominal = 60 Hz y la
potencia nominal de cada máquina es 300 MW. Las maquinas pertenecen a una misma
“área de control” y operan en “Regulación primaria” y de repente ocurre un incremento
de carga de 90 MW. Calcular:
a. Cuanto MW de carga tomará cada máquina en régimen permanente y
b. Cuanto será el valor final de la frecuencia después del transitorio.
-
=
Δ = -50 pu ……….(1)
-
=
Δ = - 25 pu ………(2)
-
=
Δ = - 12,5 pu…….(3)

17
Haciendo (1) / (2)
=
= 2 ……………(4)
=
= 4 ………….(5)
Δ = PG1 + PG2 + PG3…....(6)
=
+
+
…….(7)
De (4), (5) y (6)
= 0.5048 pu 300 MW = 151.4286 MW
=0.4190 pu 300 MW = 125.71 MW
=0.3762 pu 300 MW = 112.86 MW
Δ = 90 MW
Δ =
= -0.003429 60 =
Δ = -0.2057Hz
F = 59.7943 Hz
a. En régimen permanente la maquina 1 asumió una carga igual a 51.4286 MW, la
maquina 2 tomó una carga de 25.71 MW y la máquina 3 tomo 12,86 MW de carga,
entre las tres máquinas atendieron la variación de la carga total igual a 90 MW.
b. El nuevo valor del sistema en régimen permanente luego del aumento de la carga
es igual a 59.7943 Hz, ya que el área de control solo posee regulación primaria la
frecuencia final del sistema no vuelve a su valor nominal, ya que las variaciones de
frecuencias (errores de frecuencia) son iguales en el sistema.
18
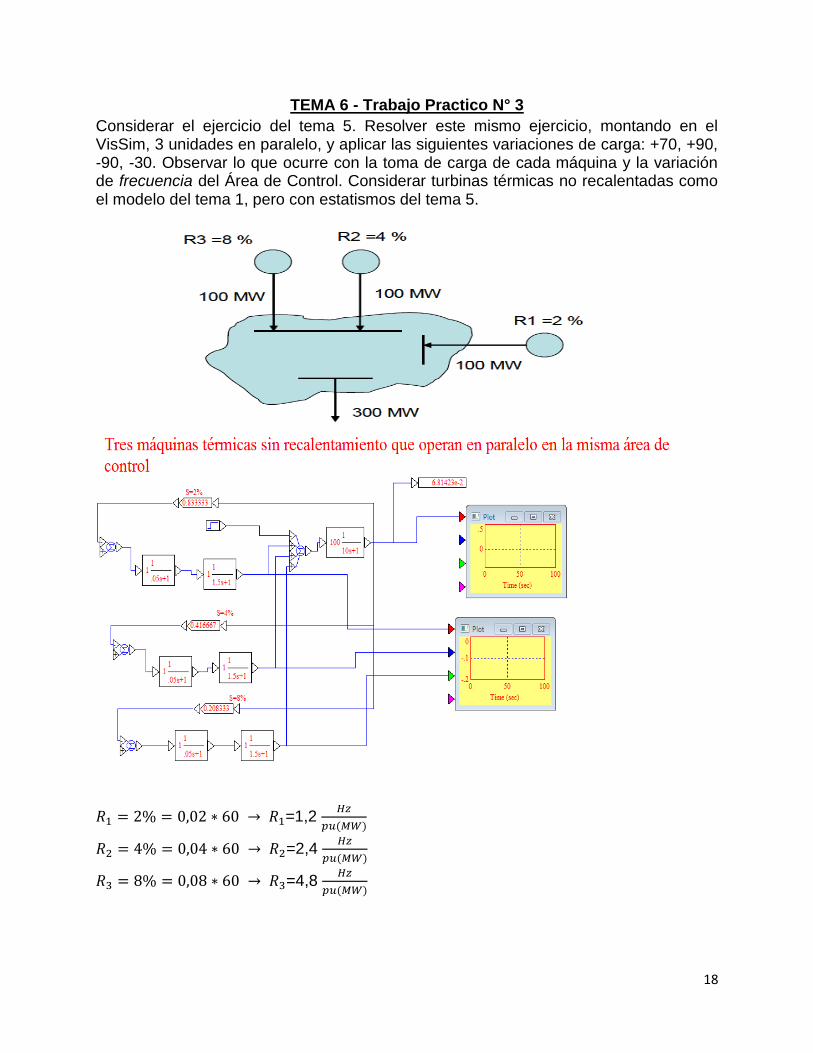
TEMA 6 - Trabajo Practico N° 3
Considerar el ejercicio del tema 5. Resolver este mismo ejercicio, montando en el VisSim, 3 unidades en paralelo, y aplicar las siguientes variaciones de carga: +70, +90, -90, -30. Observar lo que ocurre con la toma de carga de cada máquina y la variación de frecuencia del Área de Control. Considerar turbinas térmicas no recalentadas como el modelo del tema 1, pero con estatismos del tema 5.
=1,2
=2,4
=4,8

19
a) Cuando la variación de carga es de +90MW
En este caso hubo un aumento de la carga de +90MW por ende entonces la frecuencia
del sistema tendera a bajar a un valor de f= - 0.2057 Hz, ósea la frecuencia en régimen
permanente de 59,7943 Hz. Al ocurrir este aumento de carga las unidades generadoras
deberán suplir esta demanda entonces la maquina 1 con S=2% de menor estatismo
absorbió más carga que es de 0.17142 pu ósea 51,426 MW, la maquina 2 con S=4%
aumento su generación con 0.08571pu ósea 25.713 MW y la maquina 3 con S=8% con
mayor estatismo que absorberá menos carga entonces aumentó su generación a
0.042857 pu ósea 12,857 MW.

20
b) Cuando la variación de carga es de +70MW
En este caso hubo un aumento de la carga de +70MW por ende entonces la frecuencia
del sistema tendera a bajar a un valor de f= - 0.16 Hz, ósea la frecuencia en régimen
permanente de 59,84 Hz. Al ocurrir este aumento de carga las unidades generadoras
deberán suplir esta demanda entonces la maquina 1 con S=2% de menor estatismo
absorbió más carga que es de 0.1333 pu ósea 40 MW, la maquina 2 con S=4%
aumento su generación con 0.0666 pu ósea 20 MW y la maquina 3 con S=8% con
mayor estatismo que absorberá menos carga entonces aumentó su generación a
0.03333 pu ósea 10 MW.

21
c) Cuando la variación de carga es de -90MW
En este caso hubo una disminución de la carga de - 90MW por ende entonces la
frecuencia del sistema tendera a subir a un valor de f= + 0.2057 Hz, ósea la frecuencia
en régimen permanente de 60.2057 Hz. Al ocurrir esta disminución de carga las
unidades generadoras deberán retirar generación entonces la maquina 1 con S=2% de
menor estatismo retiró más carga que es de -0.17142 pu ósea -51,426 MW, la maquina
2 con S=4% retiró su generación con -0.08571pu ósea -25.713 MW y la maquina 3 con
S=8% con mayor estatismo que retiró menos carga entonces disminuyo su generación
a -0.042857 pu ósea -12,857 MW.
22
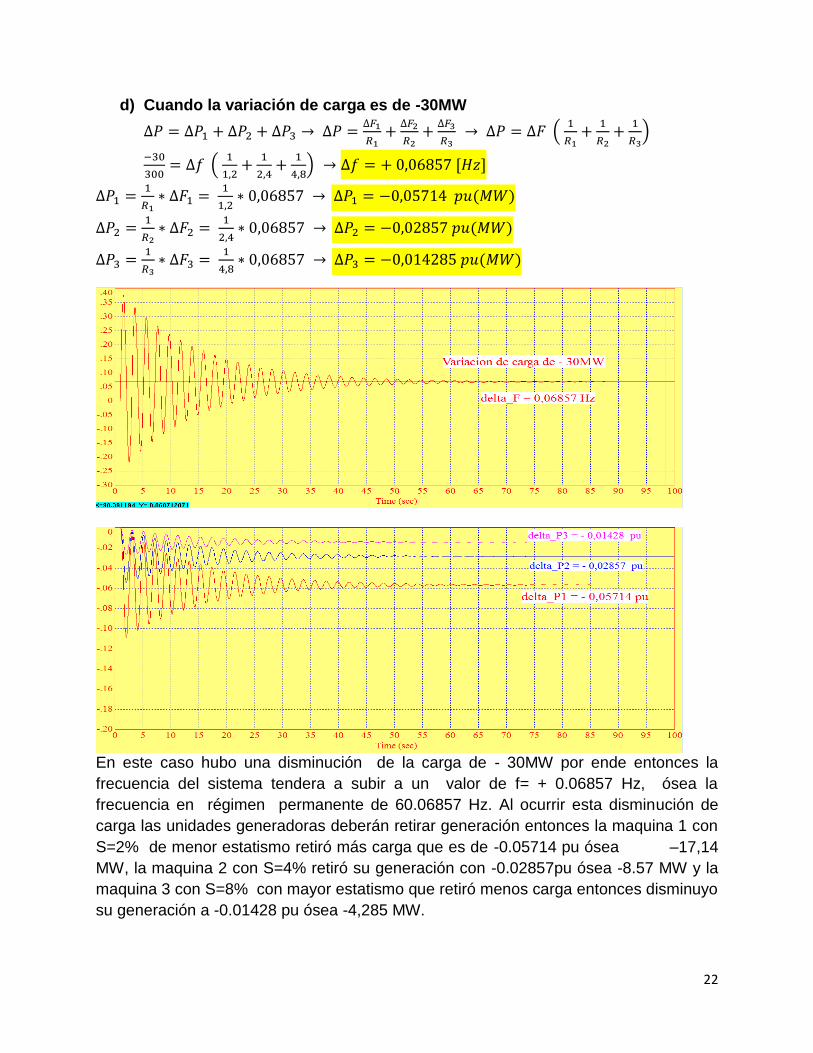
d) Cuando la variación de carga es de -30MW
En este caso hubo una disminución de la carga de - 30MW por ende entonces la
frecuencia del sistema tendera a subir a un valor de f= + 0.06857 Hz, ósea la
frecuencia en régimen permanente de 60.06857 Hz. Al ocurrir esta disminución de
carga las unidades generadoras deberán retirar generación entonces la maquina 1 con
S=2% de menor estatismo retiró más carga que es de -0.05714 pu ósea –17,14
MW, la maquina 2 con S=4% retiró su generación con -0.02857pu ósea -8.57 MW y la
maquina 3 con S=8% con mayor estatismo que retiró menos carga entonces disminuyo
su generación a -0.01428 pu ósea -4,285 MW.

23
TEMA 3 - Trabajo Practico N° 4
El siguiente modelo corresponde a un Regulador de Tensión que no posee
estabilizador. Montar el referido modelo en Vissim y ejecutarlo para un aumento de
tensión de +2% y +4% en la entrada del amplificador.
Se solicita responder los siguientes puntos:
a) Identifique y describa la denominación de todos los parámetros o variables de
las funciones de transferencia (FT), como constantes de tiempo, ganancias, etc.;

24
Referencia:
a- Entrada de señales: en ella se introducen las perturbaciones o variaciones de
tensión en la entrada del amplificador.
b- Amplificador: o conocido como el mecanismo de regulación de tensión.
c- Limitador de tensión: Controla la tensión nominal de la maquina dentro de los
límites establecidos.
d- Excitatriz: encargado del excitador del regulador de tensión.
e- Transductor: Encargado de la medición y filtrado de las señales de tensión.
f- Generador: Es la maquina principal encargada de la transformación de energía.
g- Salida de señales: se tienen referencias de lo ocurrido al recibir una perturbación
de tensión en el sistema, puede notarse el comportamiento de la tensión post-
perturbación.
Controlador Diseño Descripción
Amplificador
KA = Ganancia del amplificador TA = Constante de tiempo del amplificador.
Limitador de Tensión
VR,min = límite mínimo de variación de tensión VR,max = límite máximo de variación de tensión.
Excitador
KE = Ganancia del Excitador TE = Constante de tiempo del excitador
Generador
KG = Ganancia del generador. TG = Constante de tiempo del generador.
Transductor KR = Ganancia del filtro o transductor. TR = Constante de tiempo del transductor.

25
b) Por que la señal de salida se torna inestable? Que solución podría aplicarse para
tornar el regulador un modelo estable?
La señal de la salida es inestable para los dos casos, con variaciones de tensión de
+2% y con +4%. Como se ve en la figura sufre una oscilación que no se estabiliza en
régimen permanente, pero aplicamos el criterio de Routh – Hurwitz a la FT
característica y hallamos el lugar de las raíces.
La función de transferencia en malla abierta es:
En malla cerrada:
La ecuación característica en la malla cerrada es:
Aplicando criterio de estabilidad para Routh-Hurwitz
S4 1 226,9 K
S3 30,9 177
S2
= 221,2
S1
S0
Analizando estabilidad: Para la estabilidad, K debe ser positiva, y todos los coeficientes de la primera columna deben serlo también. Por tanto,
K>0 → KA>0,05
177-0,14K>0 → 177>0,14K→ K<1264,3 →400 KA-20<1264,3 → KA<3,21
26
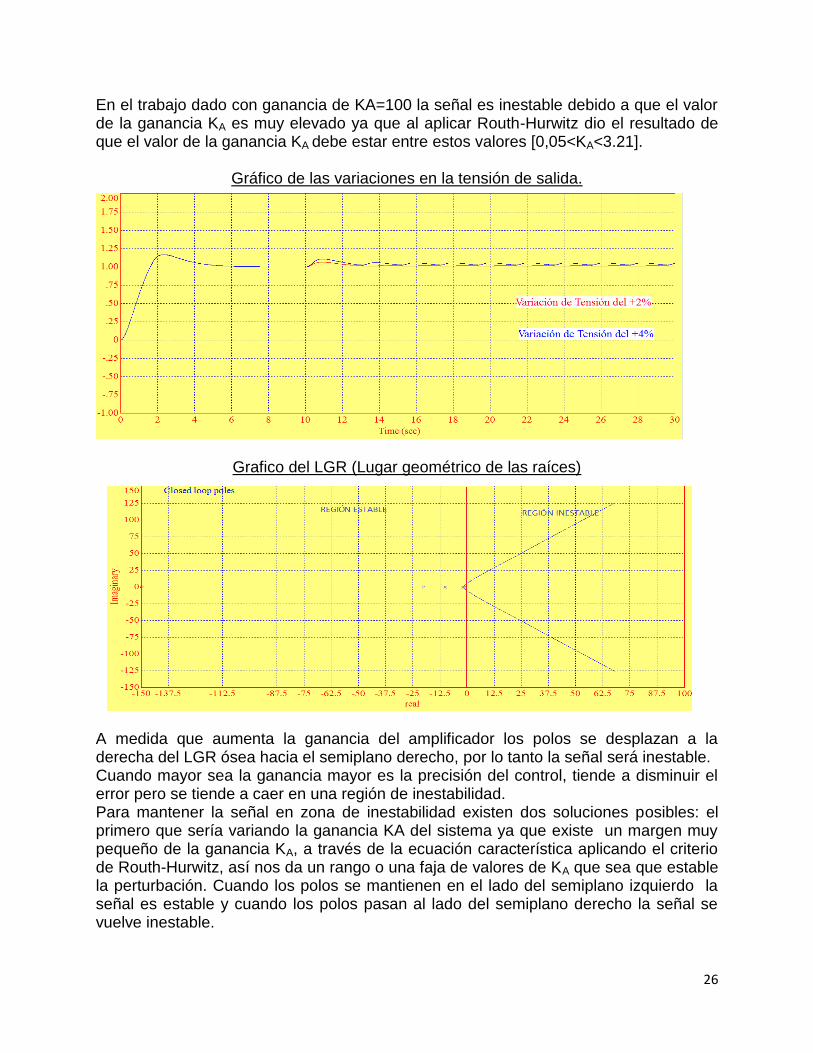
En el trabajo dado con ganancia de KA=100 la señal es inestable debido a que el valor de la ganancia KA es muy elevado ya que al aplicar Routh-Hurwitz dio el resultado de que el valor de la ganancia KA debe estar entre estos valores [0,05<KA<3.21].
Gráfico de las variaciones en la tensión de salida.
Grafico del LGR (Lugar geométrico de las raíces)
A medida que aumenta la ganancia del amplificador los polos se desplazan a la derecha del LGR ósea hacia el semiplano derecho, por lo tanto la señal será inestable. Cuando mayor sea la ganancia mayor es la precisión del control, tiende a disminuir el error pero se tiende a caer en una región de inestabilidad. Para mantener la señal en zona de inestabilidad existen dos soluciones posibles: el primero que sería variando la ganancia KA del sistema ya que existe un margen muy pequeño de la ganancia KA, a través de la ecuación característica aplicando el criterio de Routh-Hurwitz, así nos da un rango o una faja de valores de KA que sea que estable la perturbación. Cuando los polos se mantienen en el lado del semiplano izquierdo la señal es estable y cuando los polos pasan al lado del semiplano derecho la señal se vuelve inestable.

27
El segundo seria conectando un estabilizador al sistema de manera a que la señal en la salida sea estable, el compensador en este caso sería un derivador, teniendo en cuenta que el derivador tiene un polo. Se debe tener en cuenta que si al aplicar el primer método a las variaciones sometidas y si está dentro de los rangos de KA te asegura una estabilidad en la tensión de salida, sin la necesidad de conectar el estabilizador. Análogamente para el segundo caso sin importar la perturbación que se ha solicitado el estabilizador logra estabilizar la tensión en la salida hasta sin alejarse mucho de los valores de la ganancia KA, o sino si nos alejamos de la ganancia él lo estabiliza pero produce de vuelta un error de tensión en la salida muy pequeña pero la tensión de salida es mayor a la nominal. Solución:
Con KA= 2 (los gráficos están superpuestos, uno bajo otro)
Con KA=20 y Estabilizador conectado

28
c) Agregar a este modelo un lazo estratégico con una función de transferencia adecuada de forma a tornar el modelo estable. Simule nuevamente para comprobar su hipótesis; Se agrega un lazo estratégico como muestra en la figura:
Este lazo agregado se lo conoce como lazo estabilizador, es adecuado para este sistema de regulación de tensión, en este caso sería a través compensador tipo derivador o sea FE(s)= D(s)=sKst, considerando que esta FT tiene un polo, la formula
estimada del compensador es FT(s)=
Se debe tener en cuenta que al adicionar un
cero a los polos existentes en la FT de malla abierta, este cero dobla los lugares de las raíces inestables del sistema no compensado llevando al semiplano izquierdo o estable.
d) ¿Que parámetro del modelo podría ser modificado a fin de tornar el Sistema más preciso? Realice los cambios correspondientes y compruebe sus respuestas El parámetro del modelo que podría ser modificado a fin de tornar el sistema más preciso sería la de agregar un integrador en serie con el derivador ya que el integrador es un compensador que tiene como función la de eliminar el error en régimen permanente, y cuando hablamos de precisión nos referimos a eliminar el error en este caso, eliminar el error de tensión.

29
Como se ve en la figura para el mismo sistema con regulador de tensión pero es agregado en serie un integrador y corrige la precisión en la salida del sistema.
e) Explique los beneficios de las ganancias, integradores y derivadores que son aplicados a una función de transferencia (FT). Estos son conocidos como controladores PID, proporcional, derivador e integrativos P(s)= Ganancia proporcional: es un amplificador con ganancia ajustable, al aumentar disminuye el error en régimen permanente, pero empeora el transitorio para entrada constantes, a medida que se aumenta y está fuera de rango puede volver al sistema más oscilatorio pudiendo estabilizarlo. I(s)= Compensador Integrativo: Elimina el error o variación de perturbación en la salida. El modo de control Integral tiene como propósito disminuir y eliminar el error en estado estacionario, provocado por el modo proporcional. El control integral actúa cuando hay una desviación entre la variable y el punto de consigna, integrando esta desviación en el tiempo y sumándola a la acción proporcional. D(s)= Compensador Derivativo: modifica el amortiguamiento y mejora la estabilidad, conocido como un estabilizador, la función de la acción derivativa es mantener el error al mínimo corrigiéndolo proporcionalmente con la misma velocidad que se produce; de esta manera evita que el error se incremente.
30
CONCLUSIÓN Con todas las simulaciones realizadas podemos concluir que es mejor trabajar
con dos o más máquinas en paralelo conectadas a un área de control, que separar
eléctricamente cada máquina con un área específica, pues cuando trabajan juntas
las máquinas; la variación de frecuencia es menor y también la cantidad de carga
que absorbe cada una es menor a lo que debería absorber si trabajase sola.
Cuando dentro del sistema de varias unidades generadoras, una de ellas tenga
regulación secundaria, siempre la variación de frecuencia tendera a cero, lo cual es
primordial para el buen funcionamiento del sistema y estabilidad de la frecuencia de
la misma.
Hoy en día todos los sistemas de control cuentan con estos tipos de reguladores,
pues la meta es conseguir un sistema confiable y estable, y esto solo se puede
lograr si el sistema busca siempre el equilibrio entre potencia generada y potencia
de la demanda, sin variar demasiado la frecuencia, en lo posible haciendo que esta
variación sea cero.