Embed Size (px)
Citation preview
Controlador de Tránsito CT-800d
1
Controlador de Tránsito CT-800d Autotrol
versión = 101-db firmware = 5.55
manual del usuario
Controlador de Tránsito CT-800d
2
1. INDICE
1. INDICE 2
2. INTRODUCCIÓN 6
3. DIAGRAMA FUNCIONAL DEL CONTROLADOR DE TRÁNSITO CT-800D 8
3.1 Microprocesador, memorias y reloj de tiempo real 8
3.2 Módulo de potencia 9
3.3 Teclado y display 9
3.4 Comunicaciones 11
3.5 Detectores 11
3.6 Comandos 12
3.7 Detección de verdes conflictivos y ausencia de rojos 12
3.8 Sensado de lámparas 12
3.9 Detección de cruce por cero 13
4. CONTROL DE INTERSECCIONES CON EL CONTROLADOR CT-800D 14
4.1 Introducción 14
4.2 Intersección aislada controlada a ciclo fijo 15
4.3 Intersección controlada a ciclo fijo con salteo de estado 19
4.4 Intersecciones coordinadas 22
4.4.1 Intersección coordinada con el reloj de tiempo real 23
4.4.2 Intersección coordinada por otro controlador CT-800d actuando como maestro 24
Controlador de Tránsito CT-800d
3
4.4.3 Intersección coordinada por un Coordinador Maestro o Computador Central 24
5. PROGRAMACIÓN DEL CONTROLADOR CT-800D 28
5.1 Programación por intervalos 28
6. COORDINACIÓN DEL CONTROLADOR CT-800D 30
6.1 Sincronización por Reloj de Tiempo Real 30
6.2 Sincronización por señales de coordinación 32
6.3 Sincronización desde un Centro de Control 32
6.3.1 Consideraciones de software 32
6.3.1.1 Protocolo de comunicaciones 32
6.3.1.2 Facilidades 34
6.3.2 Consideraciones de hardware 34
7. OPERACIÓN Y MANTENIMIENTO 35
7.1 Introducción 35
7.2 Potencia 35
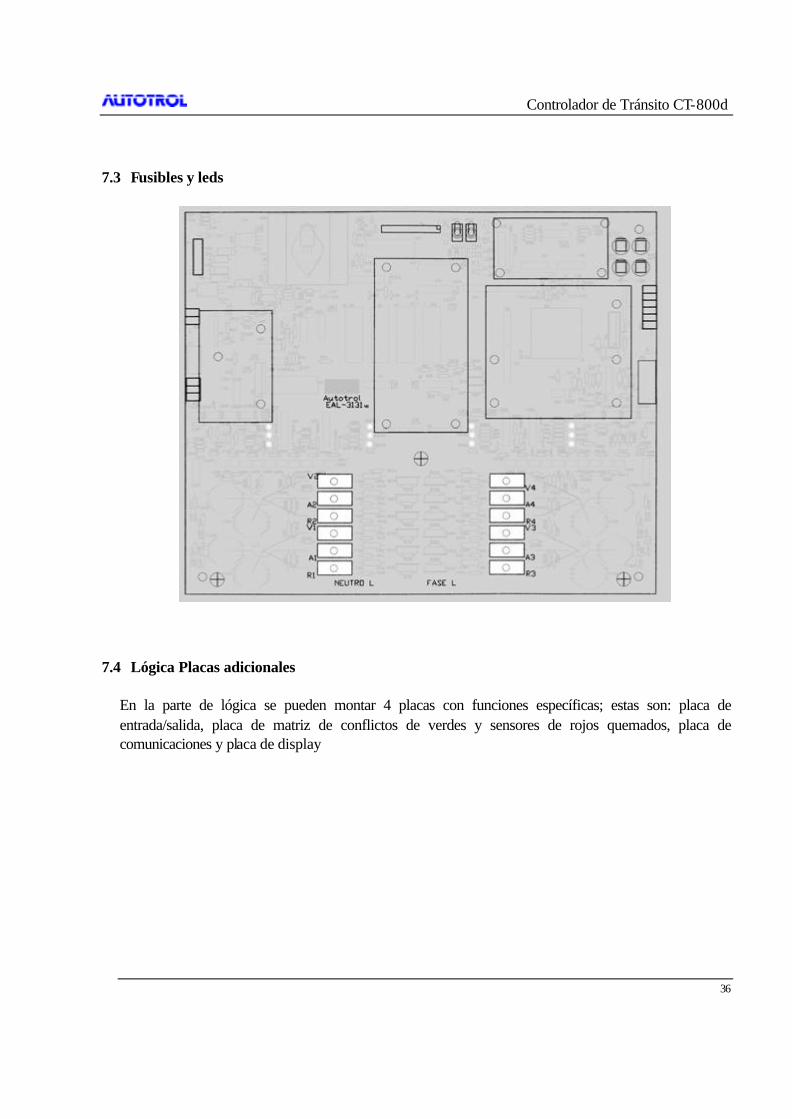
7.3 Fusibles y leds 36
7.4 Lógica Placas adicionales 36
7.5 Placa de Entrada/Salida 37
7.6 Matriz de conflictos 38
7.7 Placas de comunicaciones 39
7.8 Placa de display 39
7.9 Teclado y display 40
7.9.1 Operación 40
7.9.2 Referencia a la información del display del controlador 42
Controlador de Tránsito CT-800d
4
7.9.2.1 Texto de presentación 42
7.9.2.2 Menú de consulta de datos y errores 42
7.9.2.3 Menú de edición 42
7.9.2.4 Menú de funciones de reloj 42
7.9.2.5 Menú de operaciones especiales 42
7.9.2.6 Sub-menú de consulta de estados internos 42
7.9.2.7 Sub-menú de consulta de parámetros 44
7.9.2.8 Sub-menú de consulta de errores 44
7.9.2.9 Opción para borrar los errores almacenados 44
7.9.2.10 Sub-menú de consulta versión de firmware 45
7.9.2.11 Sub-menú de consulta de opciones 45
7.9.2.12 Menúes de parámetros 45
7.9.2.13 Sub-menúes referidos al reloj de tiempo real 46
7.9.2.14 Menú de funciones especiales 46
7.9.3 Edición de la programación por intervalos 47
7.9.3.1 Generalidades 47
7.9.3.2 programación por teclado y dis play 47
7.9.3.3 menú “edición de grupos” 48
7.9.3.4 menú “edición de planes” 49 7.9.3.4.1 descripción de los campos en pantalla 50 7.9.3.4.2 desfasaje, punto de sincronismo y tiempo máximo de espera 53
7.9.3.5 menú “edición de tabla horaria” 54 7.9.3.5.1 descripción de los campos en pantalla 54
7.9.3.6 edición de la semana automática 55
7.9.3.7 salida de menú de edición 57
7.10 Leds 59
Controlador de Tránsito CT-800d
5
7.11 Llaves de comando 60
7.11.1 Llave titilante 60
7.11.2 Llave apagado de lámparas 60
7.12 Descripción de borneras y conectores de placa base 61
8. CONTROLADOR CT-800D COMO AFORADOR DE TRÁNSITO 63
9. CONTROLADOR CT-800D PARA ACCIONAR CARTELES DE MENSAJE VARIABLE 64
10. DETECCIÓN DE LÁMPARA QUEMADA (OPCIONAL) 65
11. MECÁNICA Y MONTAJE 66
11.1 Mecánica 66
11.2 Montaje 68
11.2.1 Protecciones de acceso a la electrónica del controlador 72
11.2.2 Interfaz de comunicaciones 73
11.2.3 Interfaz de entrada y salida 74
11.2.4 Matriz de conflicto 75
11.2.5 Detectores de tránsito 76
12. INSTALACIÓN 78
12.1 Conexión de Borneras CT-800 d 80
13. ESPECIFICACIONES DEL CONTROLADOR CT-800D 82

Controlador de Tránsito CT-800d
6
2. INTRODUCCIÓN El controlador de tránsito CT-800d es un equipo de tecnología electrónica capaz de administrar los derechos de paso de vehículos y peatones de una intersección controlada por grupos de semáforos. Su diseño de avanzada lo convierte en una herramienta moderna y versátil para el profesional dedicado al control de tránsito urbano. Su espectro de aplicaciones va desde el control de una intersección operando en forma aislada, hasta su utilización en sistemas de control adaptivos en tiempo real. El controlador CT-800d comanda 4 u 8 grupos de semáforos en cualquier combinación, cuenta con un reloj de tiempo real sincronizado por línea y es capaz de almacenar hasta 32 planes de tránsito en su memoria interna. El controlador CT-800d cuenta con diversas interfaces de comunicaciones que permiten el diálogo con otros controladores de tránsito o equipos jerárquicos a través de redes de comunicaciones realizadas en cobre o fibra óptica. El controlador CT-800d tiene 8 entradas para detectores y cuenta además con otras 8 entradas y/o salidas para usos generales que le permiten implementar funciones especiales para cada aplicación particular, por ejemplo manejo de carteles de mensaje variable, activación de cámaras para control de infracciones, sensores de contaminación ambiental, etc. Los módulos de salidas a lámparas están diseñados para manejar las tradicionales lámparas incandescentes o halógenas y además semáforos de leds. Un circuito de sensado de corriente permite la detección de lámparas quemadas. Los elementos de seguridad asociados con las salidas de lámparas resuelven situaciones de verdes conflictivos y ausencia de rojos haciendo que el controlador CT-800d pase al estado de amarillo intermitente en forma automática. La programación del controlador CT-800d se realiza a través de un software gráfico que corre en cualquier PC o Laptop estándar. Se ha prestado especial interés en la interfaz hombre-máquina de manera de tener flexibilidad en la programación del controlador y facilidad en la operación del programa.
Controlador de Tránsito CT-800d
7
Este software gráfico permite además la transmisión de los programas al controlador como así también la lectura y modificación de programas previamente almacenados en el mismo. Por último este software facilita el mantenimiento de la documentación de programación del conjunto de controladores CT-800d que conforman un sistema. El conjunto de características enunciadas hacen del controlador de tránsito CT-800d una herramienta ideal para la solución de problemas de tránsito en el entorno urbano.
Controlador de Tránsito CT-800d
8
3. DIAGRAMA FUNCIONAL DEL CONTROLADOR DE TRÁNSITO CT-800D
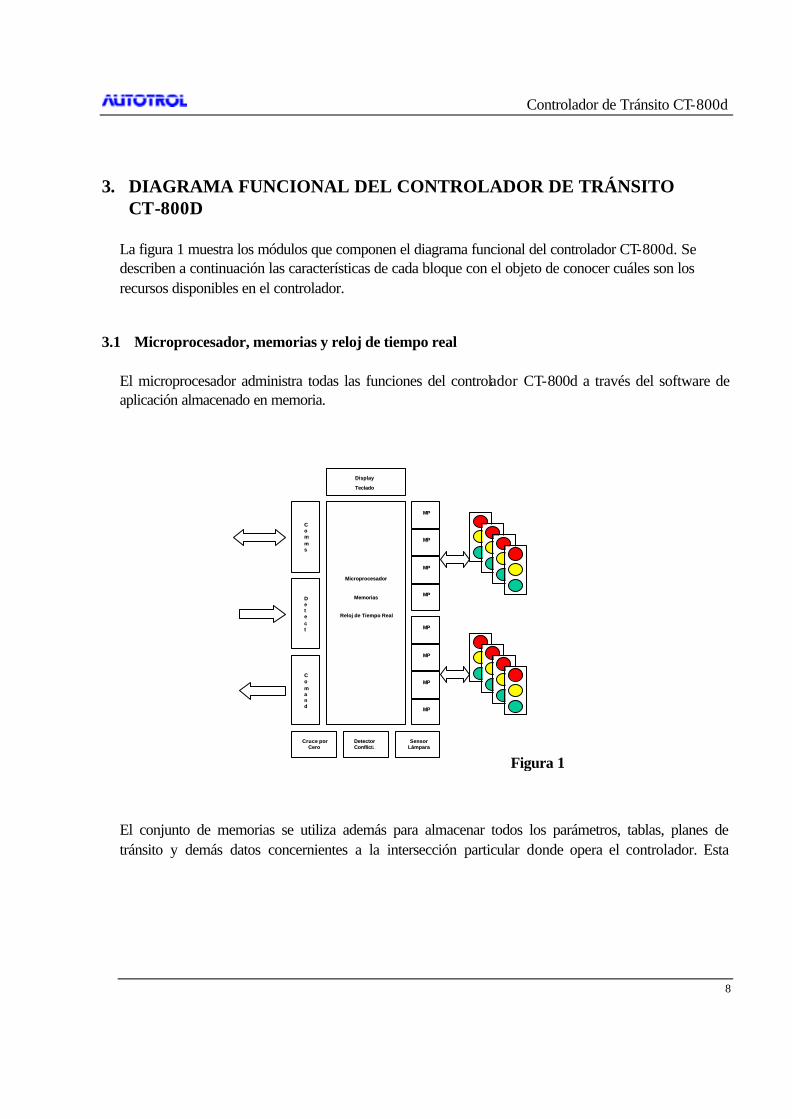
La figura 1 muestra los módulos que componen el diagrama funcional del controlador CT-800d. Se describen a continuación las características de cada bloque con el objeto de conocer cuáles son los recursos disponibles en el controlador.
3.1 Microprocesador, memorias y reloj de tiempo real El microprocesador administra todas las funciones del controlador CT-800d a través del software de aplicación almacenado en memoria.
El conjunto de memorias se utiliza además para almacenar todos los parámetros, tablas, planes de tránsito y demás datos concernientes a la intersección particular donde opera el controlador. Esta
MicroprocesadorMicroprocesador
MemoriasMemorias
Reloj de Tiempo RealReloj de Tiempo Real
DisplayDisplay
TecladoTeclado
CCoommmmss
DDeetteecctt
MPMP
MPMP
MPMP
MPMP
MPMP
MPMP
MPMP
MPMP
CCoommaanndd
Cruce porCruce porCeroCero
DetectorDetectorConflict.Conflict.
SensorSensorLámparaLámpara
Figura 1

Controlador de Tránsito CT-800d
9
información es generada por el usuario a través de un computador personal o note book y luego es transferida al controlador por una de sus líneas de comunicaciones. En los casos en que se deba guardar información recolectada en terreno como por ejemplo aforos de tránsito, se utiliza parte de la memoria debidamente soportada por batería para que no exista pérdida de información en caso de corte de suministro eléctrico. El reloj de tiempo real mantiene la información de fecha y hora dentro del controlador CT-800d. Este reloj está sincronizado con la frecuencia de línea, de manera de asegurar la misma hora en controladores pertenecientes a una misma región. De esta forma, aún sin vinculación física entre controladores es posible obtener coordinación entre los mismos. Otra de las funciones del reloj de tiempo real es establecer los modos de funcionamiento del controlador de acuerdo con la hora del día, el día de la semana y eventualmente algún día especial como ser un feriado. El reloj de tiempo real está soportado por batería.
3.2 Módulo de potencia El módulo de potencia es el encargado de manejar las salidas a lámparas de acuerdo con los comandos impuestos por el microprocesador. A cada módulo le corresponde un grupo de señal, es decir comanda a las lámparas verde, amarilla y roja. Está diseñado para operar con lámparas incandescentes, de halógeno o leds y cada una de sus salidas está protegida por un fusible de fácil reemplazo. El comando de las lámparas se realiza por elementos de estado sólido. El módulo de potencia provee además la información básica para el detector de señales verdes conflictivas y ausencia de rojos.
3.3 Teclado y display El controlador CT-800d cuenta con una interfaz de teclado y display incorporada que permite obtener información básica acerca del funcionamiento y operación del controlador. En el display alfanumérico se refresca continuamente información de los parámetros de operación. A través del teclado pueden seleccionarse los distintos datos mostrados por el display o introducir parámetros básicos como ser fecha y hora.

Controlador de Tránsito CT-800d
10
Controlador de Tránsito CT-800d
11
3.4 Comunicaciones Este bloque es el que permite que el controlador CT-800d dialogue con otros equipos en un sistema de control de tránsito. A modo de ejemplo podemos nombrar un computador central, un controlador maestro, o bien otro controlador de tránsito. Las opciones para soportar esta comunicación son, entre otras: módem, fibra óptica, lazo de corriente, etc. Por otro lado, la implementación de diferentes protocolos de comunicación se realiza en forma sencilla en el software de aplicación del controlador CT-800d. Una interfaz RS-232 permite el diálogo entre el controlador CT-800d y un note-book.
3.5 Detectores Los detectores vehiculares son los equipos encargados de sensar la presencia de flujo vehicular en las arterias a controlar. Esta información puede ser utilizada para diferentes aplicaciones, entre otras:
∗ Recolección de características del tránsito para enviar al nivel jerárquico del sistema donde se toman acciones en función de los niveles de tránsito en cada arteria. Esta información puede utilizarse para selección dinámica de planes prealmacenados, control adaptivo en tiempo real, etc.
∗ Recolección de características del tránsito con fines estadísticos. Estos parámetros, como ser volumen,
ocupación, velocidad media, etc., son almacenados dentro de la memoria interna del controlador y a posteriori procesados a través de algún programa estándar de computación (planilla electrónica, etc.).
∗ Utilización de la información de los detectores para el control local de la intersección, es decir, se
asignan derechos de paso y su duración de acuerdo con las demandas del tránsito en cada arteria.
∗ Utilización de la información de los detectores para sensar infracciones de violaciones de luz roja, excesos de velocidad, invasión de senda peatonal, etc.
Alternativamente las entradas de detectores del controlador CT-800d pueden utilizarse para conectar pulsadores de demanda peatonal o bien otros sensores que sirvan para informar alguna condición externa ya sea para utilizar en el controlador o transmitir al centro de control (ejemplos: señal de barrera de ferrocarril baja, vehículo de emergencia, sensor de monóxido de carbono, etc.)
Controlador de Tránsito CT-800d
12
3.6 Comandos En forma complementaria a las entradas para detectores, el controlador CT-800d cuenta con salidas de comandos para usos generales. Como ejemplos de aplicación para estos comandos podemos citar:
∗ Activación de paneles de mensajes (velocidad, congestionamiento, estacionamiento, etc.) ∗ Señal de comando para dispositivos de registro de infracciones.
3.7 Detección de verdes conflictivos y ausencia de rojos El controlador CT-800d cuenta con dos mecanismos de detección de señales verdes conflictivas y ausencia de rojos. Una plaqueta de circuito impreso, enchufable en la plaqueta principal permite, a través de puentes, programar los pares de señales verdes que resultan conflictivas para la estructura de la intersección bajo control. De igual manera son seleccionables los grupos semafóricos donde se sensa la ausencia total de rojos. El segundo mecanismo es similar al primero, salvo que éste se realiza por software, es decir la selección de pares de señales verdes conflictivas o sensado de rojos se establece a través del software gráfico de programación del controlador. La redundancia en la detección de señales conflictivas de verde y ausencia de rojos reduce a una mínima expresión la posibilidad de mostrar en la vía pública un conjunto de señales en los semáforos que atenten contra la seguridad vial. Cualquiera de ambos mecanismos que falle está respaldado por el otro. La acción que toma el controlador CT-800d ante la operación de señales verdes conflictivas o ausencia total de rojos en un grupo semafórico es la de pasar a operar en modo de amarillo intermitente. En paralelo se da aviso de falla a la central de control y se almacena en el registro interno de eventos del controlador la falla, la causa y la fecha y hora.
3.8 Sensado de lámparas
Controlador de Tránsito CT-800d
13
Los sensores de corriente de salida a lámparas permiten detectar lámparas quemadas en la instalación, informando el evento al centro de control. Esta característica facilita el mantenimiento de las instalaciones y reduce sus costos.
3.9 Detección de cruce por cero Esta señal, generada a partir del suministro de energía eléctrica permite generar todas las señales de disparo de las llaves de estado sólido en un punto de mínima tensión, sincronizar al reloj de tiempo real y ajustar los parámetros internos del controlador en forma automática para redes operando en 50 ó 60 Hz.
Controlador de Tránsito CT-800d
14
4. CONTROL DE INTERSECCIONES CON EL CONTROLADOR CT-800D
4.1 Introducción El control de tránsito en una intersección a través de semáforos consiste en una cesión ordenada de los derechos de paso de cada uno de los movimientos vehiculares y peatonales. Cada movimiento vehicular o peatonal está controlador por un grupo semafórico que da o quita el derecho de paso. Es posible que uno o más movimientos vehiculares y peatonales puedan circular por la intersección en forma simultánea sin molestarse uno con otro. A este conjunto de uno o más grupos semafóricos cediendo en forma simultánea el derecho de paso lo denominamos estado. Entonces, el control de una intersección, consiste en una secuencia de estados que darán derechos de paso hasta satisfacer todos los movimientos o grupos semafóricos. Por otro lado, el paso de un estado a otro debe realizarse a través de intervalos de tiempo que aseguren que una corriente vehicular o peatonal se detenga antes de dar el derecho de paso a otra conflictiva. Estos intervalos son de despeje vehicular o peatonal y están representados por el amarillo vehicular; el intermitente peatonal; etc. Al conjunto de estos intervalos de prevención se los denomina en forma genérica como entreverde. Cada estado estará separado temporalmente del siguiente por un período de entreverde. Resumiendo, la intersección está controlada a través de una secuencia de estados y entreverdes que satisfacen el derecho de paso de cada uno de los movimientos vehiculares y peatonales. El tiempo necesario para ejecutar todos los estados y entreverdes se denomina ciclo. Con estos conceptos en mente podemos definir la forma de operación de diferentes modalidades de control.
Controlador de Tránsito CT-800d
15
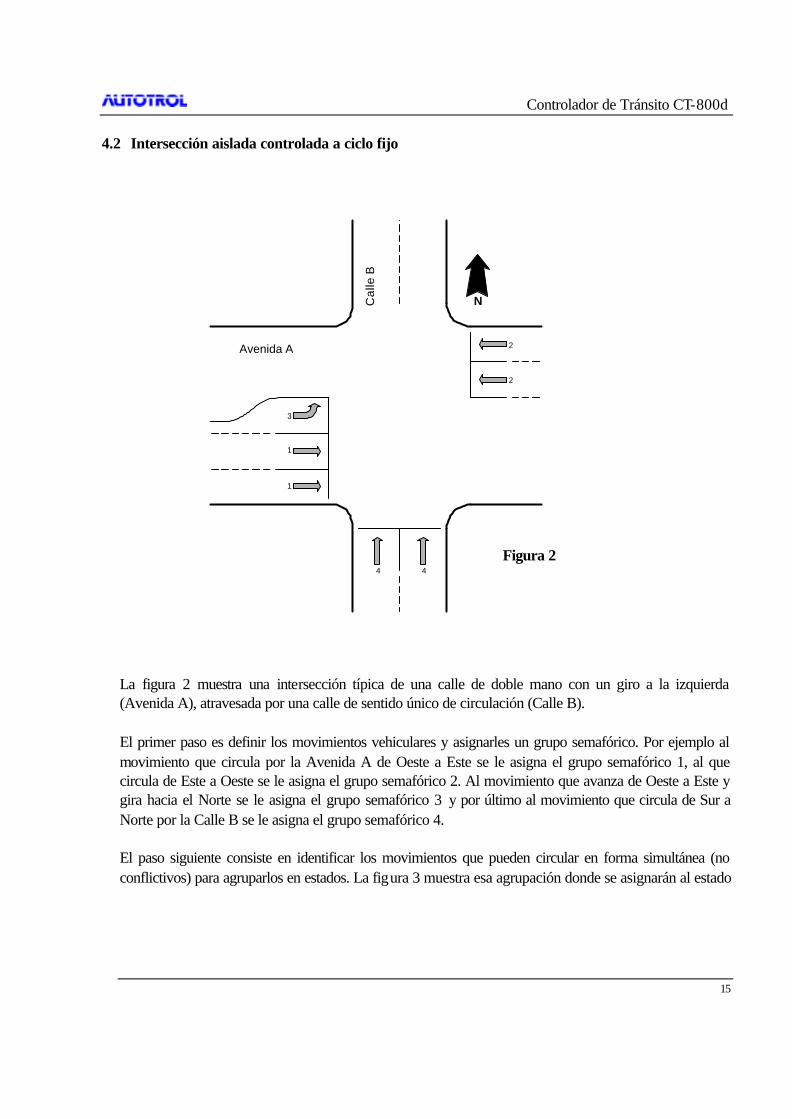
4.2 Intersección aislada controlada a ciclo fijo
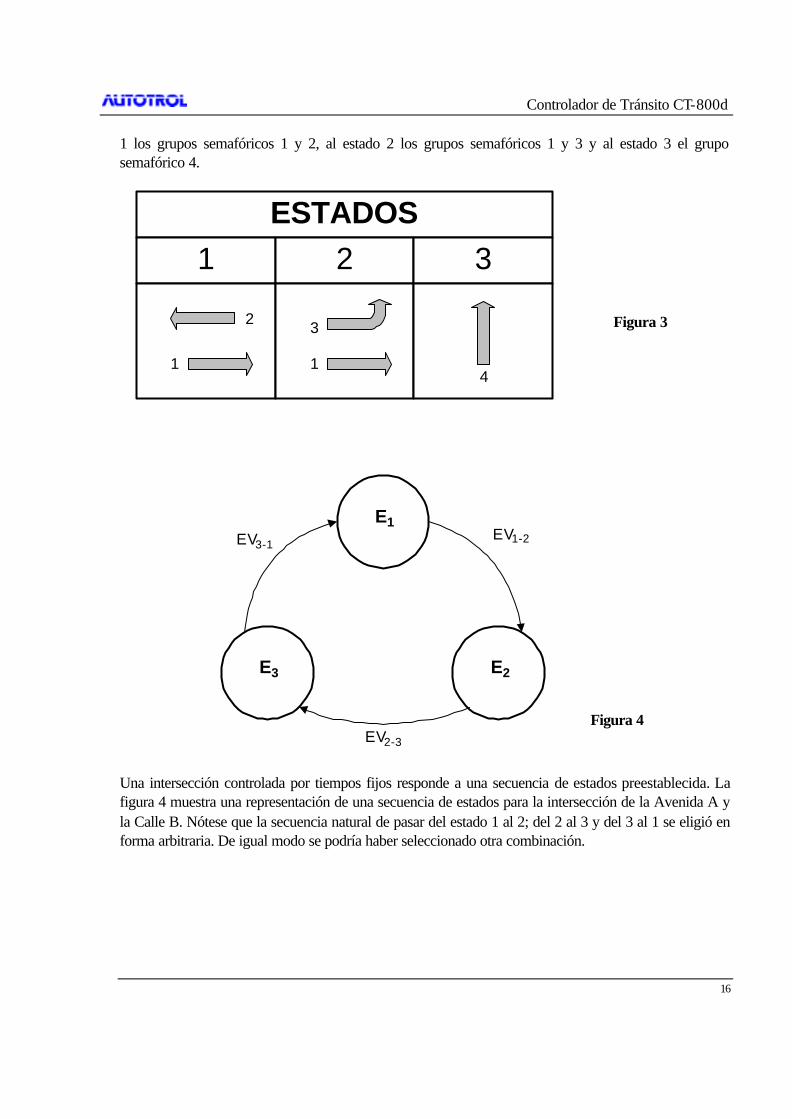
La figura 2 muestra una intersección típica de una calle de doble mano con un giro a la izquierda (Avenida A), atravesada por una calle de sentido único de circulación (Calle B). El primer paso es definir los movimientos vehiculares y asignarles un grupo semafórico. Por ejemplo al movimiento que circula por la Avenida A de Oeste a Este se le asigna el grupo semafórico 1, al que circula de Este a Oeste se le asigna el grupo semafórico 2. Al movimiento que avanza de Oeste a Este y gira hacia el Norte se le asigna el grupo semafórico 3 y por último al movimiento que circula de Sur a Norte por la Calle B se le asigna el grupo semafórico 4. El paso siguiente consiste en identificar los movimientos que pueden circular en forma simultánea (no conflictivos) para agruparlos en estados. La figura 3 muestra esa agrupación donde se asignarán al estado
3
1
1
2
2
4 4
Avenida A
Cal
le B
N
Figura 2
Controlador de Tránsito CT-800d
16
1 los grupos semafóricos 1 y 2, al estado 2 los grupos semafóricos 1 y 3 y al estado 3 el grupo semafórico 4.
Una intersección controlada por tiempos fijos responde a una secuencia de estados preestablecida. La figura 4 muestra una representación de una secuencia de estados para la intersección de la Avenida A y la Calle B. Nótese que la secuencia natural de pasar del estado 1 al 2; del 2 al 3 y del 3 al 1 se eligió en forma arbitraria. De igual modo se podría haber seleccionado otra combinación.
E1
E2E3
EV1-2
EV2-3
EV3-1
ESTADOS1 2 3
2
1 1
3
4
Figura 3
Figura 4
Controlador de Tránsito CT-800d
17
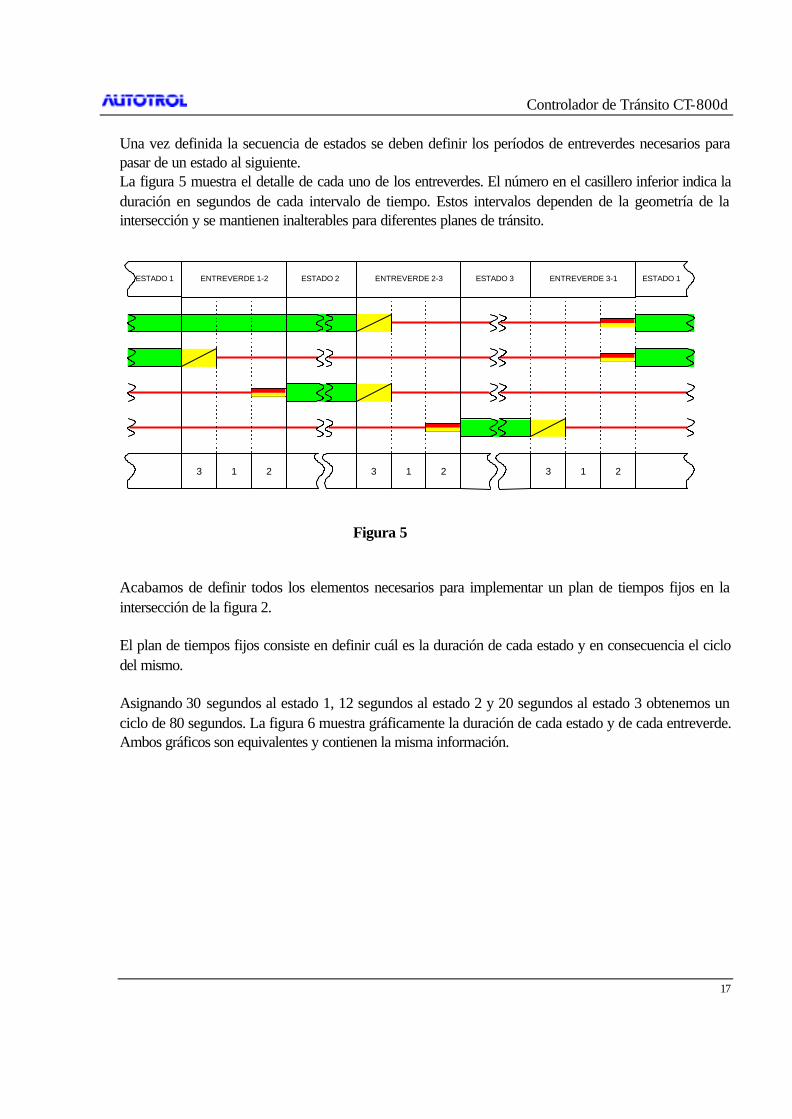
Una vez definida la secuencia de estados se deben definir los períodos de entreverdes necesarios para pasar de un estado al siguiente. La figura 5 muestra el detalle de cada uno de los entreverdes. El número en el casillero inferior indica la duración en segundos de cada intervalo de tiempo. Estos intervalos dependen de la geometría de la intersección y se mantienen inalterables para diferentes planes de tránsito. Acabamos de definir todos los elementos necesarios para implementar un plan de tiempos fijos en la intersección de la figura 2. El plan de tiempos fijos consiste en definir cuál es la duración de cada estado y en consecuencia el ciclo del mismo. Asignando 30 segundos al estado 1, 12 segundos al estado 2 y 20 segundos al estado 3 obtenemos un ciclo de 80 segundos. La figura 6 muestra gráficamente la duración de cada estado y de cada entreverde. Ambos gráficos son equivalentes y contienen la misma información.
ENTREVERDE 1-2 ESTADO 2 ENTREVERDE 2-3 ESTADO 3 ENTREVERDE 3-1ESTADO 1 ESTADO 1
3 1 2 3 1 2 3 1 2
Figura 5
Controlador de Tránsito CT-800d
18
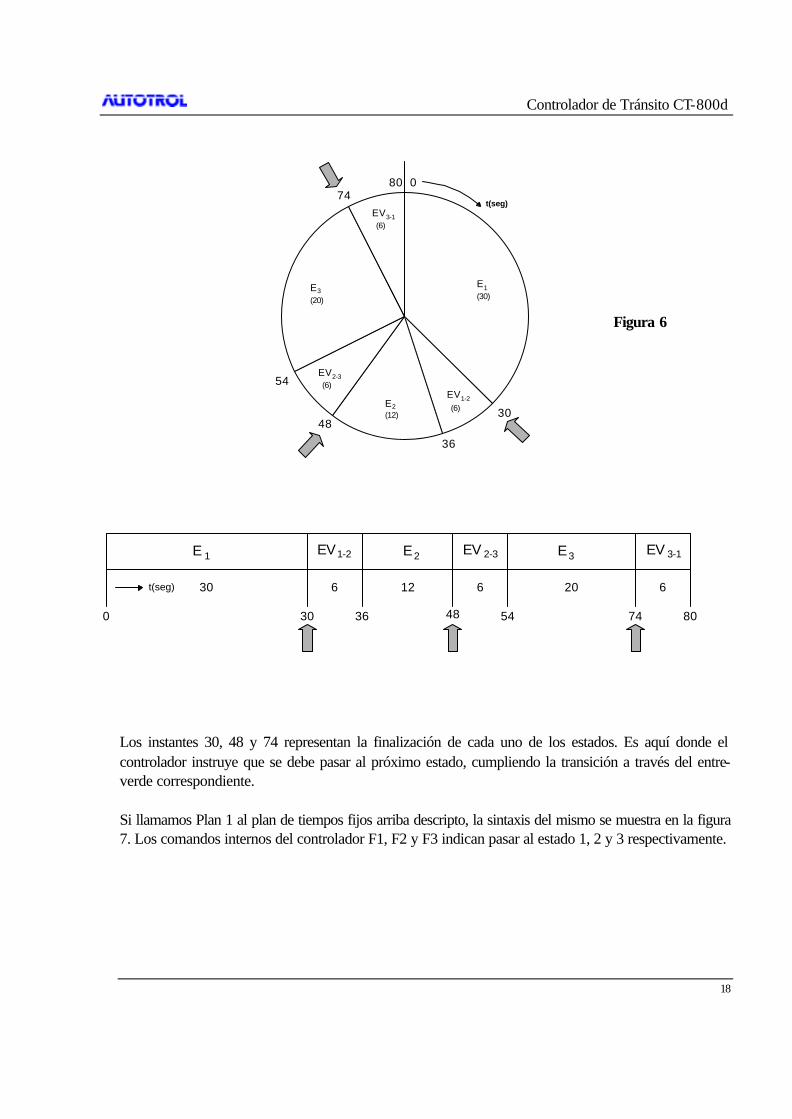
Los instantes 30, 48 y 74 representan la finalización de cada uno de los estados. Es aquí donde el controlador instruye que se debe pasar al próximo estado, cumpliendo la transición a través del entre-verde correspondiente. Si llamamos Plan 1 al plan de tiempos fijos arriba descripto, la sintaxis del mismo se muestra en la figura 7. Los comandos internos del controlador F1, F2 y F3 indican pasar al estado 1, 2 y 3 respectivamente.
080
t(seg)EV3-1(6)
EV1-2(6)
EV2-3(6)
E3(20)
E1(30)
E2(12) 30
36
48
54
74
E 1 E2 E3EV1-2 EV 2-3 EV 3-1
0 30 36 48 54 74 80
30 6 6 62012t(seg)
Figura 6
Controlador de Tránsito CT-800d
19
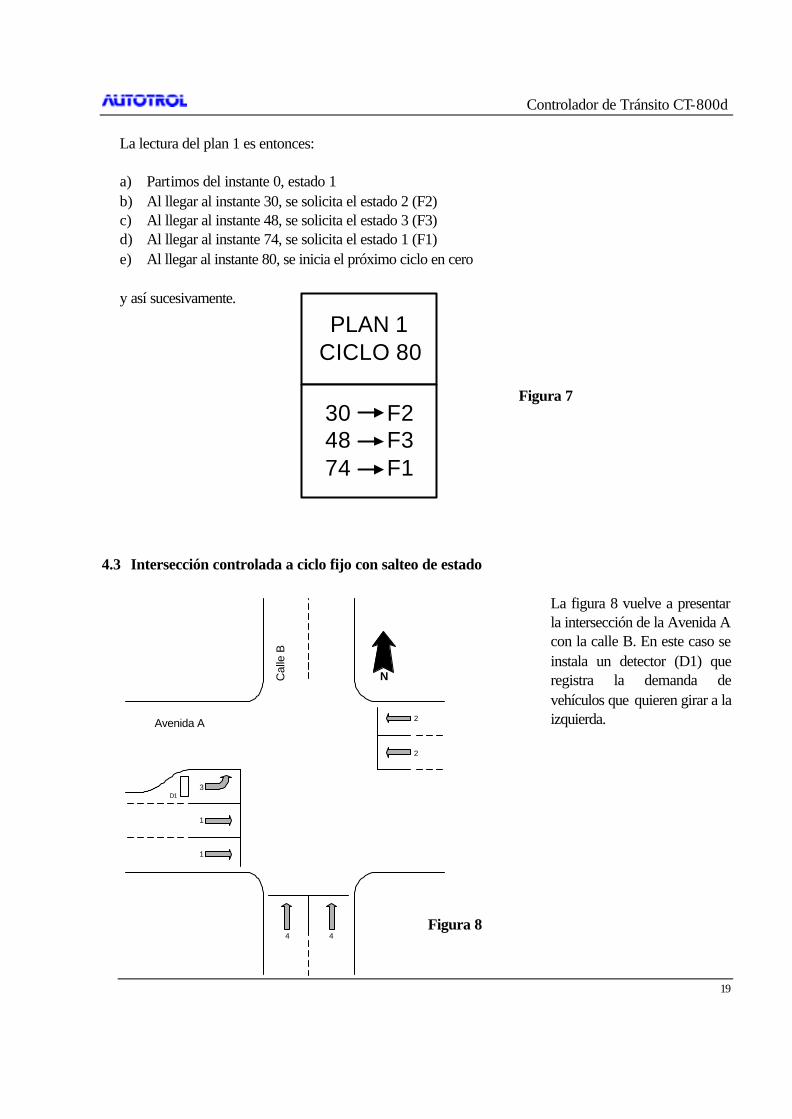
La lectura del plan 1 es entonces: a) Partimos del instante 0, estado 1 b) Al llegar al instante 30, se solicita el estado 2 (F2) c) Al llegar al instante 48, se solicita el estado 3 (F3) d) Al llegar al instante 74, se solicita el estado 1 (F1) e) Al llegar al instante 80, se inicia el próximo ciclo en cero y así sucesivamente.
4.3 Intersección controlada a ciclo fijo con salteo de estado
La figura 8 vuelve a presentar la intersección de la Avenida A con la calle B. En este caso se instala un detector (D1) que registra la demanda de vehículos que quieren girar a la izquierda.
PLAN 1CICLO 80
30 F248 F374 F1
Figura 7
3
1
1
2
2
4 4
Avenida A
Cal
le B
N
D1
Figura 8
Controlador de Tránsito CT-800d
20
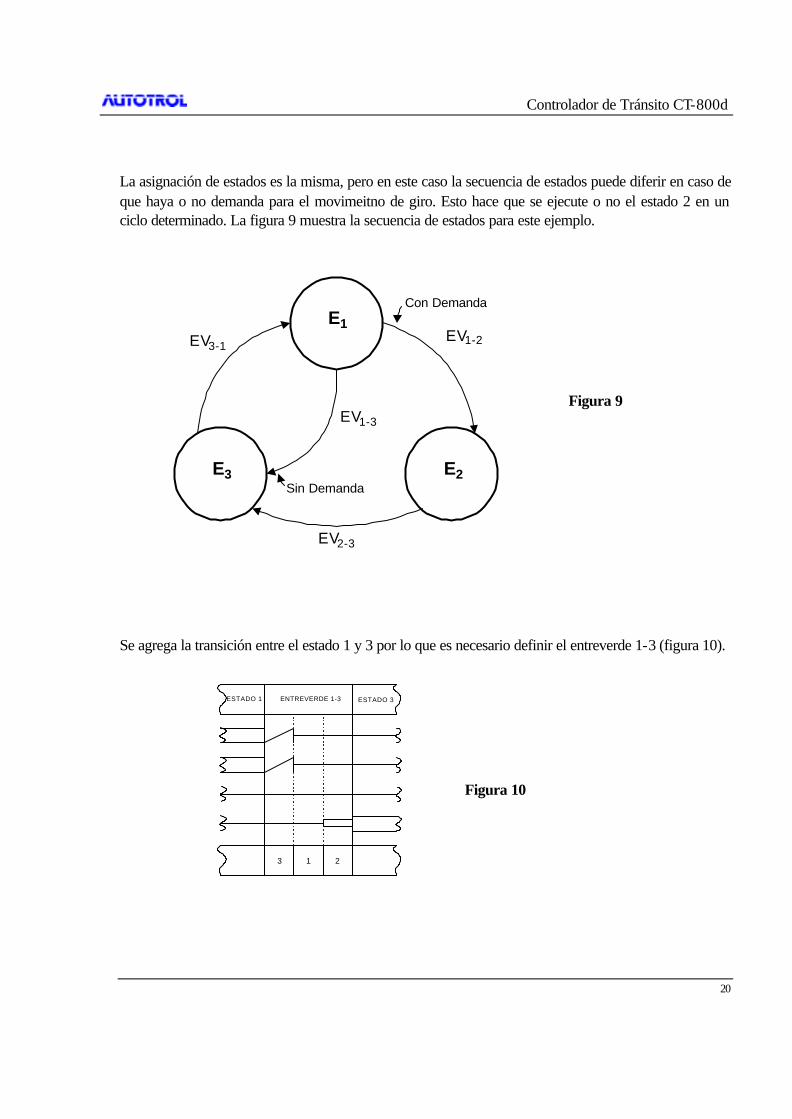
La asignación de estados es la misma, pero en este caso la secuencia de estados puede diferir en caso de que haya o no demanda para el movimeitno de giro. Esto hace que se ejecute o no el estado 2 en un ciclo determinado. La figura 9 muestra la secuencia de estados para este ejemplo. Se agrega la transición entre el estado 1 y 3 por lo que es necesario definir el entreverde 1-3 (figura 10).
E1
E2E3
EV1-2
EV2-3
EV3-1
EV1-3
Sin Demanda
Con Demanda
Figura 9
ESTADO 1 ESTADO 3
3 1 2
ENTREVERDE 1-3
Figura 10
Controlador de Tránsito CT-800d
21
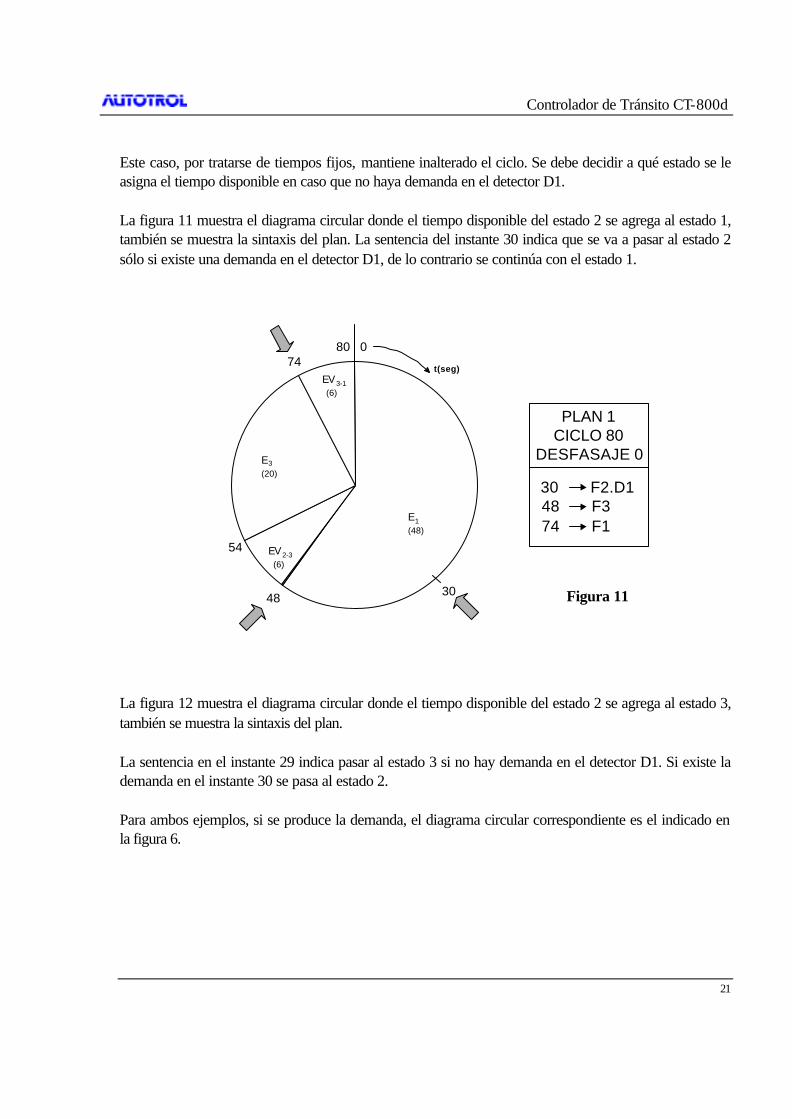
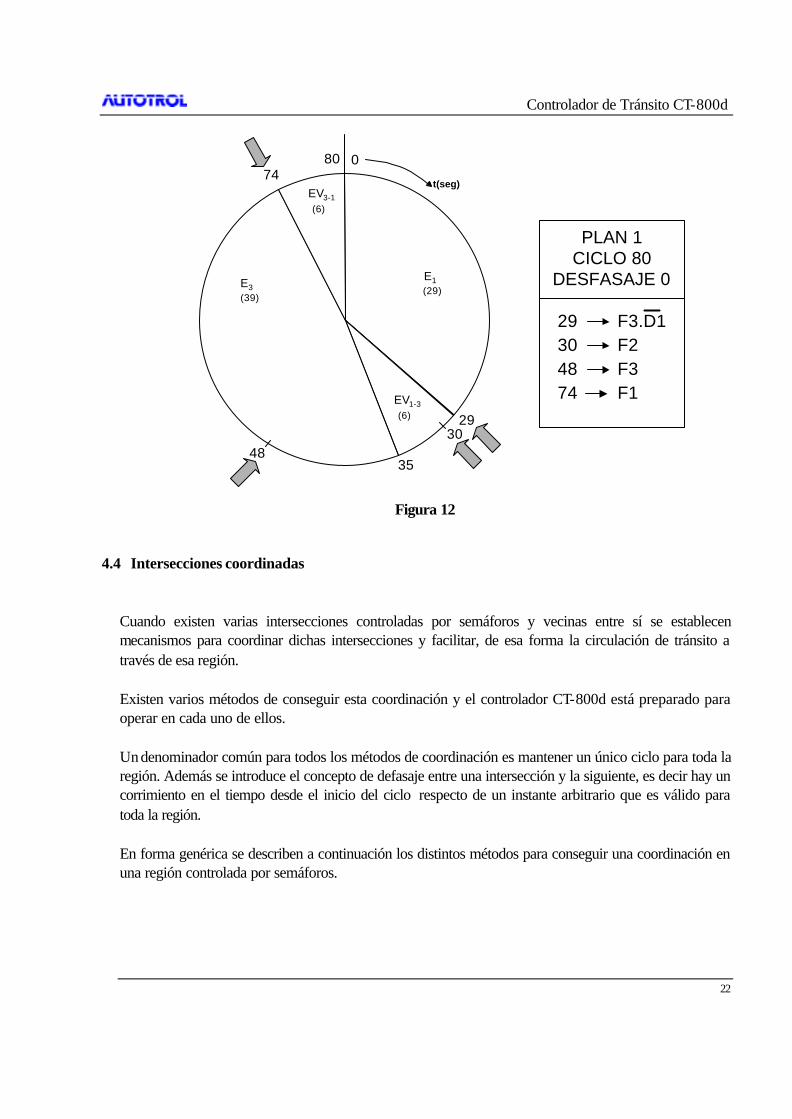
Este caso, por tratarse de tiempos fijos, mantiene inalterado el ciclo. Se debe decidir a qué estado se le asigna el tiempo disponible en caso que no haya demanda en el detector D1. La figura 11 muestra el diagrama circular donde el tiempo disponible del estado 2 se agrega al estado 1, también se muestra la sintaxis del plan. La sentencia del instante 30 indica que se va a pasar al estado 2 sólo si existe una demanda en el detector D1, de lo contrario se continúa con el estado 1. La figura 12 muestra el diagrama circular donde el tiempo disponible del estado 2 se agrega al estado 3, también se muestra la sintaxis del plan. La sentencia en el instante 29 indica pasar al estado 3 si no hay demanda en el detector D1. Si existe la demanda en el instante 30 se pasa al estado 2. Para ambos ejemplos, si se produce la demanda, el diagrama circular correspondiente es el indicado en la figura 6.
080
t(seg)EV3-1(6)
EV2-3(6)
E3
(20)
E1(48)
3048
54
74
30 F2.D1
PLAN 1CICLO 80
DESFASAJE 0
48 F374 F1
Figura 11
Controlador de Tránsito CT-800d
22
080
t(seg)EV3-1(6)
E3(39)
E1(29)
3048
74
EV1-3(6) 29
35
PLAN 1CICLO 80
DESFASAJE 0
30 F248 F3
29 F3.D1
74 F1
Figura 12
4.4 Intersecciones coordinadas Cuando existen varias intersecciones controladas por semáforos y vecinas entre sí se establecen mecanismos para coordinar dichas intersecciones y facilitar, de esa forma la circulación de tránsito a través de esa región. Existen varios métodos de conseguir esta coordinación y el controlador CT-800d está preparado para operar en cada uno de ellos. Un denominador común para todos los métodos de coordinación es mantener un único ciclo para toda la región. Además se introduce el concepto de defasaje entre una intersección y la siguiente, es decir hay un corrimiento en el tiempo desde el inicio del ciclo respecto de un instante arbitrario que es válido para toda la región. En forma genérica se describen a continuación los distintos métodos para conseguir una coordinación en una región controlada por semáforos.
Controlador de Tránsito CT-800d
23
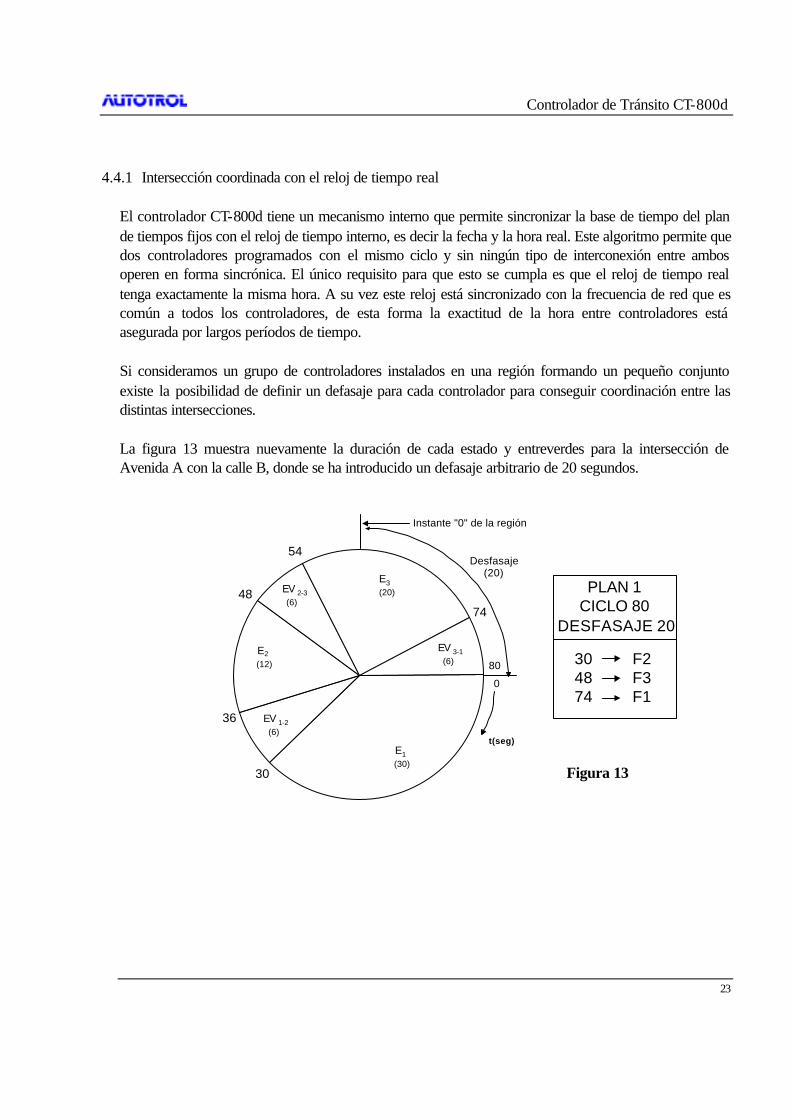
4.4.1 Intersección coordinada con el reloj de tiempo real El controlador CT-800d tiene un mecanismo interno que permite sincronizar la base de tiempo del plan de tiempos fijos con el reloj de tiempo interno, es decir la fecha y la hora real. Este algoritmo permite que dos controladores programados con el mismo ciclo y sin ningún tipo de interconexión entre ambos operen en forma sincrónica. El único requisito para que esto se cumpla es que el reloj de tiempo real tenga exactamente la misma hora. A su vez este reloj está sincronizado con la frecuencia de red que es común a todos los controladores, de esta forma la exactitud de la hora entre controladores está asegurada por largos períodos de tiempo. Si consideramos un grupo de controladores instalados en una región formando un pequeño conjunto existe la posibilidad de definir un defasaje para cada controlador para conseguir coordinación entre las distintas intersecciones. La figura 13 muestra nuevamente la duración de cada estado y entreverdes para la intersección de Avenida A con la calle B, donde se ha introducido un defasaje arbitrario de 20 segundos.
t(seg)
EV 3-1(6)
EV 1-2(6)
EV 2-3(6)
E3(20)
E1(30)
E2
(12)
30
36
48
54
74
80
0
Instante "0" de la región
Desfasaje(20)
PLAN 1CICLO 80
DESFASAJE 20
30 F248 F374 F1
Figura 13
Controlador de Tránsito CT-800d
24
Se muestra además, la sintaxis del plan de tiempos donde se introdujo el defasaje, como parámetro adicional. La selección de planes de acuerdo con la hora y el día de la semana lo realiza el propio controlador a través de una tabla horaria almacenada en su memoria.
4.4.2 Intersección coordinada por otro controlador CT-800d actuando como maestro
El controlador CT-800d tiene un mecanismo interno que permite interconectar un conjunto de controladores a través de algún medio físico, generalmente pares telefónicos. Este conjunto opera de forma tal que uno de los controladores CT-800d se convierte en controlador maestro y el resto opera como controlador esclavo de esa red. El controlador maestro envía a intervalos regulares la hora del sistema y el plan de tránsito que debe ejecutarse. De esta forma cada controlador esclavo ajusta su reloj interno al del maestro y ejecuta el plan de tránsito que éste le indica. Un defasaje interno programado en cada controlador hace que se produzca el efecto de coordinación entre intersecciones. La tabla horaria del controlador que opera como maestro selecciona el plan de tránsito a ejecutar por todo el conjunto. Desde el punto de vista funcional este sistema opera en forma similar que el conjunto de controladores operando sin interconexión. Como ventaja adicional se tiene que el controlador maestro permite poner en hora a todo el conjunto de controladores y además la tabla horaria del maestro es la que comanda toda la región. Queda claro que el controlador maestro simplemente impone un plan de tránsito interno del controlador esclavo. El efecto de coordinación se produce por tener un ciclo común, sincronizado con la hora real y un defasaje programado internamente por cada plan.
4.4.3 Intersección coordinada por un Coordinador Maestro o Computador Central
Controlador de Tránsito CT-800d
25
En los casos anteriores no es posible alterar en forma dinámica el reparto de verdes, ni el defasaje, ni el ciclo en los controladores esclavos.
Controlador de Tránsito CT-800d
26
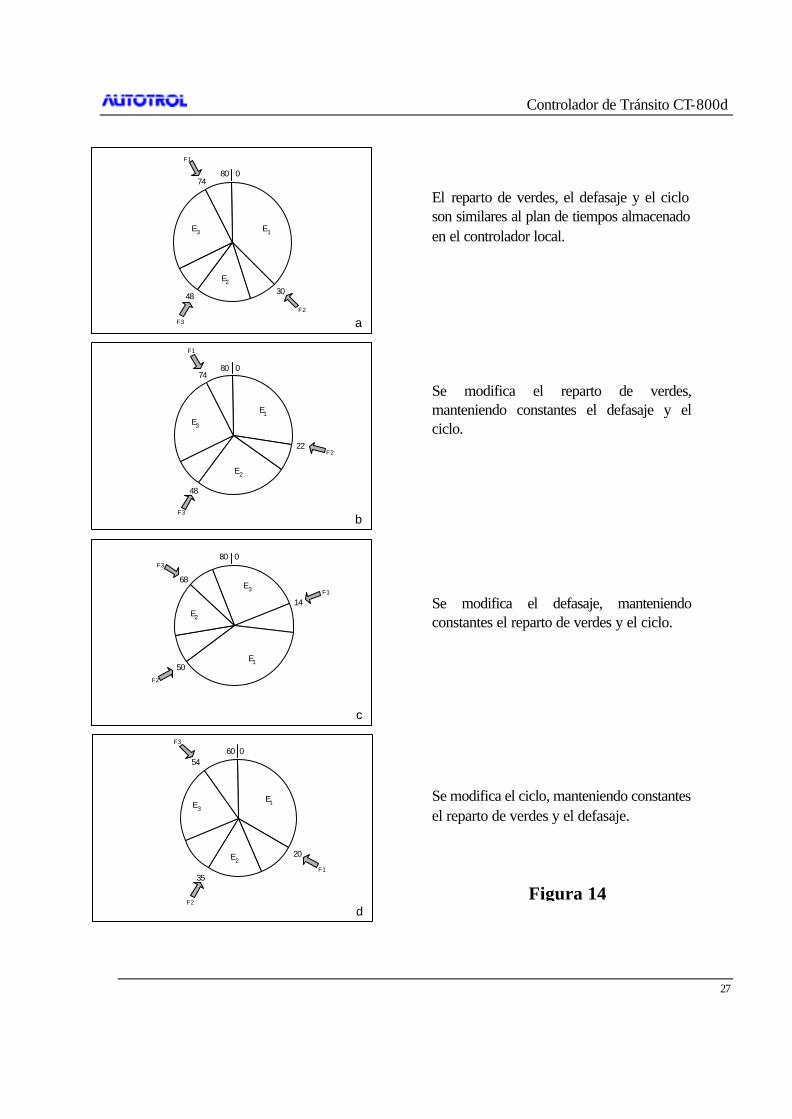
El controlador CT-800d está preparado para recibir señales de coordinación desde un coordinador maestro o computador central para actuar sobre cada uno de sus estados. Esta característica hace que el controlador CT-800d sea completamente flexible para adaptarse a los comandos del nivel jerárquico superior. La figura 14 muestra cuatro posibles variaciones respecto a un plan de tránsito. El coordinador maestro o computador central envía en los instantes señalados las señales de coordinación para cada estado. El primer gráfico (a) reproduce exactamente el diagrama de la intersección Avenida A con calle B de la figura 6. Ahora las señales de cambio de estado provienen de los equipos de control, a través de la red de comunicaciones. El gráfico (b) muestra la alteración de los repartos de verde, adelantando el envío de la señal de coordinación F2. Ahora el estado 1 dura menos tiempo y este tiempo es cedido al estado 2. En el gráfico (c) se observa que se ha adicionado un defasaje, manteniendo constante la duración de los estados. Por último el gráfico (d) mantiene la proporción en la duración de los estados pero reduce el ciclo a 60 segundos. Para ser claros en los ejemplos se colocó cada gráfico de forma tal de alterar un único parámetro a la vez. Queda claro que, dependiendo de los algoritmos que operen en los equipos jerárquicos será posible alterar los repartos de verde, defasajes y ciclos en forma simultánea.
Controlador de Tránsito CT-800d
27
060
20
35
54
E1
E2
E3
F1
F2
F3
d
80 0
14
50
68
E1
E2
E3 F1
F2
F3
c
80 0
22
48
74
E1
E2
E3
F2
F3
F1
b
80 074
48 30
E1
E2
E3
F2
F3
F1
a
El reparto de verdes, el defasaje y el ciclo son similares al plan de tiempos almacenado en el controlador local. Se modifica el reparto de verdes, manteniendo constantes el defasaje y el ciclo. Se modifica el defasaje, manteniendo constantes el reparto de verdes y el ciclo. Se modifica el ciclo, manteniendo constantes el reparto de verdes y el defasaje. Figura 14
Controlador de Tránsito CT-800d
28
5. PROGRAMACIÓN DEL CONTROLADOR CT-800D La programación del controlador CT-800d se realiza mediante la utilización de un paquete de software para PC denominado Visual 800. Este software ha sido diseñado por la empresa Autotrol para operar en computadoras PC compatible, bajo el sistema operativo Microsoft Windows, en cualquiera de sus versiones de 32 bits (Windows 95, Windows 98, Windows NT 4 ó superior). Todas las alternativas presentadas como ejemplos en los puntos anteriores son fácilmente programables en el controlador CT-800d a través del Visual 800. El usuario simplemente debe definir sus requerimientos a través de una serie de pantallas gráficas que le presentarán las distintas opciones para cada caso. Para mayor información acerca del Visual 800, por favor referirse al Manual del Usuario del Visual 800.
5.1 Programación por intervalos Este controlador de tránsito admite la programación por intervalos. Ideal para situaciones sencillas donde no se requiere toda la estructura de la programación por estados, esta forma de configuración del equipo está disponible para su implementación mediante el teclado y display incorporados al controlador, brindando una alternativa de solución inmediata en campo. La programación por intervalos se basa en una planilla de fácil interpretación que indica, para cada instante del ciclo del cruce, cuáles son las luces encendidas en cada grupo semafórico. La ejecución de la programación se realiza en forma sencilla desde el teclado y display siguiendo un menú, que guía en la entrada de los datos hasta llegar a la total configuración del cruce. Esta programación, sencilla y natural para la edición e interpretación, tiene sus limitaciones en cuanto a herramientas para la ingeniería de tránsito; por tal motivo, la programación por estados se impone cuando se trata de equipos con salteos de fase, con condiciones particulares de actuación externa, sincronismo por frecuencia de línea, coordinación y subordinación a Centros de Control de Tránsito, etc.
Controlador de Tránsito CT-800d
29
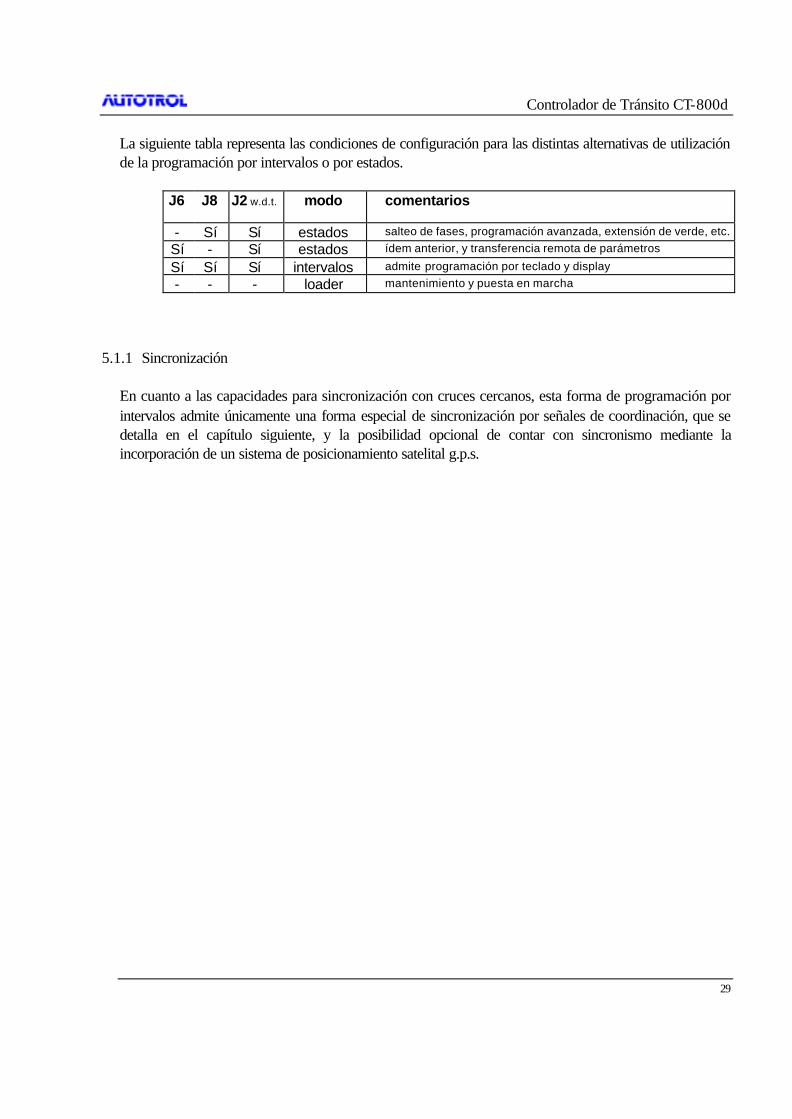
La siguiente tabla representa las condiciones de configuración para las distintas alternativas de utilización de la programación por intervalos o por estados.
J6 J8 J2 w.d.t.
modo comentarios
- Sí Sí estados salteo de fases, programación avanzada, extensión de verde, etc.
Sí - Sí estados ídem anterior, y transferencia remota de parámetros
Sí Sí Sí intervalos admite programación por teclado y display
- - - loader mantenimiento y puesta en marcha
5.1.1 Sincronización En cuanto a las capacidades para sincronización con cruces cercanos, esta forma de programación por intervalos admite únicamente una forma especial de sincronización por señales de coordinación, que se detalla en el capítulo siguiente, y la posibilidad opcional de contar con sincronismo mediante la incorporación de un sistema de posicionamiento satelital g.p.s.
Controlador de Tránsito CT-800d
30
6. COORDINACIÓN DEL CONTROLADOR CT-800D En un capítulo precedente se hizo mención a la coordinación desde el punto de vista de la programación del controlador, en la sección de intersecciones coordinadas. En este capítulo se describen las posibilidades y características que presenta el CT-800d en cuanto a coordinación enfocada desde la óptica del sistema. Un “sistema de controladores coordinados” es un conjunto de controladores locales que, estando próximos entre sí, adecuan o “sincronizan” sus funcionamientos para obtener mejoras en el comportamiento global del tránsito en el área (por ejemplo, implementando ondas verdes en arterias principales). El requerimiento básico es que exista algún tipo de comunicación entre los controladores locales mediante el cual un controlador obtenga datos de los controladores cercanos para operar en forma relacionada (coordinada). La especificación definitiva de un sistema de controladores coordinados va a depender del grado de “conectividad” entre equipos, del costo de instalación y mantenimiento de las comunicaciones y, en definitiva, de las facilidades y prestaciones que se esperan del conjunto en su totalidad. Varios métodos permiten la coordinación entre intersecciones. Cada método presenta variaciones y opciones, que con diferencias en costos de implementación y prestaciones, cubren el amplio espectro del moderno Control de Tránsito Urbano de la actualidad. El controlador CT-800d dispone de módulos de software y hardware para integrarse a cualquiera de los sistemas que se resumen a continuación.
6.1 Sincronización por Reloj de Tiempo Real El controlador CT-800d contiene un “Reloj de Tiempo Real” que mantiene la fecha y hora actuales. Como ya se mencionó en el capítulo precedente, el controlador dispone de un algoritmo que, haciendo referencia a una fecha y hora patrón, permite la adecuación de su funcionamiento en base a parámetros de ingeniería de tránsito (largo de ciclo, defasaje, etc.). Como la fecha y hora patrón es la misma en todos los controladores, se puede diagramar un funcionamiento coordinado del área programando cuidadosamente los parámetros de cada controlador, y confiando en la precisión y exactitud del “reloj de tiempo real” propio de cada equipo. Para la programación, ver en el capítulo anterior los puntos “Intersección coordinada con el reloj de tiempo real” y “Intersección coordinada por otro controlador CT-800d actuando como maestro”.
Controlador de Tránsito CT-800d
31
En resumen, en este tipo de coordinación, una vez programado adecuadamente el controlador va a operar en sincronismo si está en hora. Entonces, el objetivo principal ahora es garantizar la precisión de la fecha y hora en el controlador. Para ello, se cuenta con las siguientes opciones: § La forma más sencilla es basarse en el cristal propio del controlador local. A pesar de la precisión
que presenta (mejor que 1 min. por mes, o sea mejor que 25 ppm), la diferencia acumulada entre equipos puede llegar a ser alta con el paso del tiempo, perdiendo sincronización.
§ Una mejor forma es basándose en la frecuencia de línea, la que es común a los distintos equipos del
área. El controlador puede ajustar su fecha y hora según la frecuencia de línea; a pesar de la pobre precisión, la ventaja es que es igual en todos los equipos, los que se mantienen en perfecto sincronismo. La falencia de esta opción se presenta si un equipo se mantiene apagado durante un lapso de tiempo considerable (en tal caso, la fecha y hora propias se basan únicamente en el cristal propio del reloj de tiempo real, que sigue funcionando por el respaldo de batería). La diferencia con los equipos que estuvieron funcionando y ajustando sus horas con la línea puede ser importante, considerando la pobre estabilidad de la frecuencia de línea en el corto plazo
§ Una forma interesante consiste en utilizar un gps (Global Positioning System). Mediante esta
tecnología satelital se obtiene una muy buena precisión que no disminuye con el paso del tiempo. § Los CT-800d pueden interconectarse formando una red mediante conexión por cable telefónico. En
este tipo de sistema, un controlador hace de “maestro” de comunicaciones, generando mensajes que reciben otros controladores, los “esclavos” en la red, que adecuan sus parámetros y su reloj interno en concordancia con el “maestro”. Mediante este procedimiento se puede, además de garantizar el sincronismo de los relojes, comandar un estado de titilante remoto, emergencia, etc. Una característica adicional es que un controlador “esclavo” es un repetidor activo para los controladores que siguen, y pasa a ser “maestro” si pierde el enlace con el controlador previo. Se obtiene así un subsistema que sigue coordinado aún cuando se interrumpan enlaces en el medio. Además, se pueden integrar otros equipos Autotrol al sistema (CT-800i, CT-800A). Estas prestaciones adicionales, junto con la característica de que como cada controlador intermedio retransmite las señales se puede diseñar una red sin límite teórico en el número de intersecciones coordinadas, hacen interesante esta opción aún a pesar del requerimiento de tendido de cables de interconexión. Puede también tomarse como paso inicial para después crecer hacia uno de los sistemas que se indican en el método II de coordinación, que utilice un red de interconexión similar.
Controlador de Tránsito CT-800d
32
6.2 Sincronización por señales de coordinación § Mediante interfaz adecuada, el CT-800d puede interconectarse a una red de controladores
electromecánicos, donde un “maestro” transmite señales de coordinación, titilante, selección de planes, etc.
§ Cuando el controlador se programa por intervalos, se dispone de esta forma de coordinación, con la
ventaja de operar tanto subordinado a un ‘equipo maestro’ que genera las señales, como propiamente como ‘equipo maestro’, donde según su programación interna envía las señales de sincronismo hacia otros controladores cercanos. Esta facilidad está siempre presente y opera de tal manera que un controlador esclavo pasa a ser maestro cuando no recibe coordinación, de forma de asegurar el sincronismo hacia los equipos siguientes aún cuando se cae la comunicación con el equipo anterior. En este régimen de operación se cuenta con un titilante remoto, una selección de plan de tránsito y una solicitud de modo especial de operación en forma remota (apagado de lámparas o emergencia de bomberos), además de la señal de sincronismo de sistema.
6.3 Sincronización desde un Centro de Control La desventaja primordial de los sistemas de coordinación mencionados hasta aquí es que se trata de redes a “lazo abierto”, y donde prácticamente el único objetivo de la interconexión de equipos es la puesta en hora (sincronismo basado en el reloj de tiempo real propio de cada controlador). Una comunicación entre equipos, mediante tendido de una red de interconexión, inmediatamente nos lleva a la idea de obtener información del estado de cada intersección. Surge así el enlace en las dos direcciones, de tal manera de controlar una intersección y al mismo tiempo recibir datos del controlador. Un Centro de Control será un lugar geográfico desde donde una computadora registrará el estado de los distintos equipos, que mantendrá coordinados, y desde donde un operador podrá emitir comandos hacia determinado controlador.
6.3.1 Consideraciones de software
6.3.1.1 Protocolo de comunicaciones El primer punto a considerar en cuanto a este tipo de sistemas concierne al protocolo de comunicaciones; consiste en la definición lógica que determina las señales de comando que llegan al controlador así como el formato de la información que proviene del mismo. Este protocolo es entonces el lenguaje por medio del cual dialoga el controlador con el Centro de Control. En los casos en los que un
Controlador de Tránsito CT-800d
33
sistema contiene otros equipos como Concentradores de Comunicaciones, Maestros de Comunicaciones, etc., existirá un protocolo por cada par de equipos distintos interconectados. El CT-800d tiene implementados actualmente un conjunto de protocolos que permiten su integració n con sistemas de diversa complejidad. Siendo un producto de diseño moderno, modular y de alto nivel, este controlador puede fácilmente adaptarse a nuevos protocolos que sean de dominio público o estén adecuadamente documentados. Los protocolos actualmente en existencia, cubren las siguientes áreas: § sistemas de control del tránsito para tiempos fijos y selección dinámica de planes § sistemas de control del tránsito adaptativos en tiempo real (Scoot)
Controlador de Tránsito CT-800d
34
6.3.1.2 Facilidades Un resumen de las facilidades más notorias que se disponen en el controlador CT-800d se presenta a continuación. Es de destacar que el controlador está diseñado con las funcionalidades descriptas, pero que en última instancia es el protocolo, como las herramientas del Centro de Control, los que determinan las facilidades y propiedades del Sistema de Control de Tránsito en su totalidad. § lectura del estado, modo de funcionamiento, situación presente de la intersección § comandos de puesta en titilante, selección del modo de funcionamiento, selección del plan de
tránsito, modo de vehículos de emergencia, etc. § lectura de errores almacenados, eventos almacenados, borrado de dichos espacios de memoria no
volátil § lectura del reloj de tiempo real; puesta en hora remota § información detallada de la intersección, incluye el estado de todas las salidas de lámparas en cada
instante § información de la presencia de lámparas quemadas, con ubicación de la falla; lectura y
almacenamiento de los parámetros “nominales” y la tensión de alimentación § lectura remota de la información correspondiente a las estadísticas de los detectores (ver punto
“controlador CT-800d como aforador de tránsito” § lectura y actualización de todos los parámetros de tránsito para la intersección § actualización remota del firmware del controlador § etc.
6.3.2 Consideraciones de hardware La interconexión entre equipos se implementa por distintos medios físicos, que requieren diversos componentes de hardware en el CT-800d. Plaquetas enchufables de fácil identificación y remplazo resuelven la interfaz adecuada. A continuación se resumen los modos más usados: § RS-485 , § RS-232 , § 20 mA (lazo de corriente tipo TTY) , § módem para línea dedicada , § módem para línea telefónica , § fibra óptica , § equipo celular
Controlador de Tránsito CT-800d
35
7. OPERACIÓN Y MANTENIMIENTO
7.1 Introducción El controlador CT-800d posee una placa básica (EAL-3131) la cual se encuentra dividida en 2 partes principales, la parte de potencia y la de lógica.
7.2 Potencia En la parte de potencia se encuentran los fusibles de salida de lámparas los cuales son de 4 amperes. Estas salidas permiten comandar hasta 12 lámparas (4 grupos de señales). Si fuese necesario comandar más grupos de señal es posible conectar una placa de potencia adicional (EAL-3133) a través del conector P6 situado en la parte superior de la placa EAL-3131. Este conector vincula las señales lógicas entre ambas placas. La placa adicional de potencia cuenta además con sus respectivos fusibles de salida de lámparas. Por otra parte cada grupo de señal cuenta con leds indicadores del estado de las lámparas correspondientes.
Controlador de Tránsito CT-800d
36
7.3 Fusibles y leds
7.4 Lógica Placas adicionales En la parte de lógica se pueden montar 4 placas con funciones específicas; estas son: placa de entrada/salida, placa de matriz de conflictos de verdes y sensores de rojos quemados, placa de comunicaciones y placa de display
Controlador de Tránsito CT-800d
37
7.5 Placa de Entrada/Salida Existen 3 opciones de acuerdo a las necesidades. Estas son: 16 entradas de detectores 8 entradas de detectores y 8 salidas auxiliares 16 salidas auxiliares Cualquiera de estas opciones se conectan a la placa base por medio de los conectores P5 y P5’ de la misma. La conexión al campo se realiza a través de las borneras dispuestas a tal efecto y cuya descripción se muestra a continuación:
1-entrada detector 1 2-entrada detector 2 3-entrada detector 3 4-entrada detector 4 5-entrada detector 5 6-entrada detector 6 7-entrada detector 7 8-entrada detector 8 9-salida de señal auxiliar 1 10-salida de señal auxiliar 2 11-salida de señal auxiliar 3 12-salida de señal auxiliar 4 13-salida de señal auxiliar 5 14-salida de señal auxiliar 6 15-salida de señal auxiliar 7 16-salida de señal auxiliar 8
Controlador de Tránsito CT-800d
38
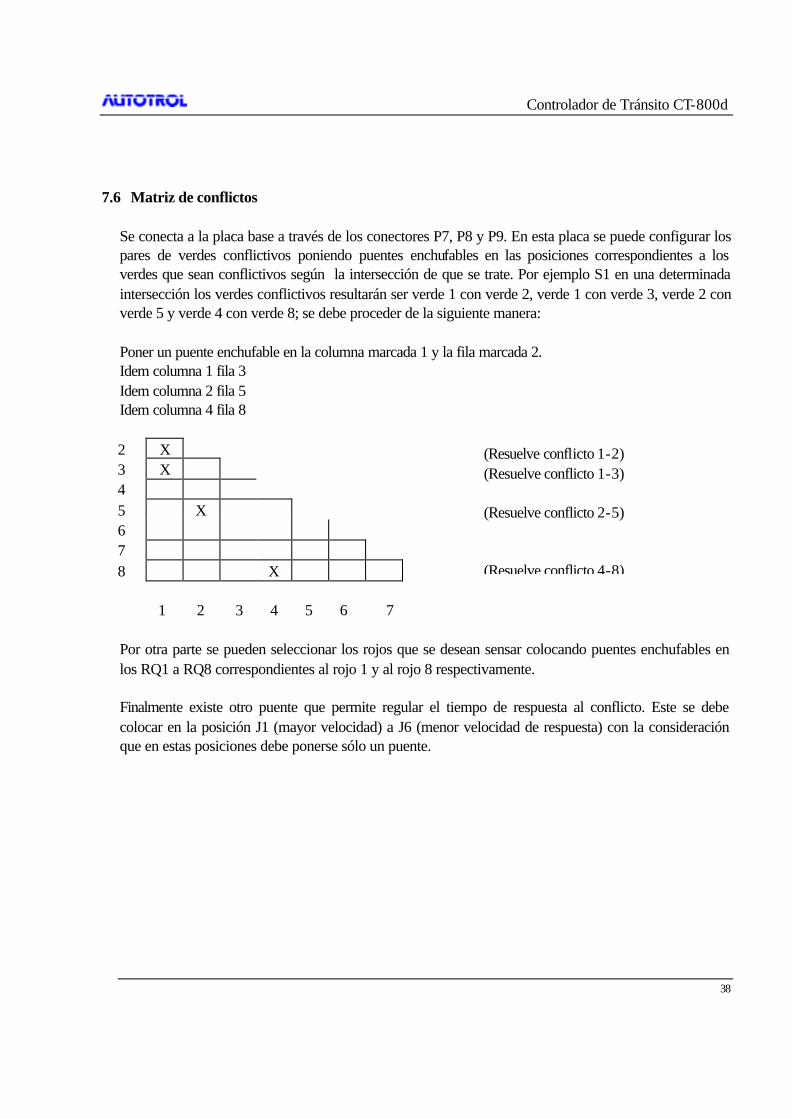
7.6 Matriz de conflictos
Se conecta a la placa base a través de los conectores P7, P8 y P9. En esta placa se puede configurar los pares de verdes conflictivos poniendo puentes enchufables en las posiciones correspondientes a los verdes que sean conflictivos según la intersección de que se trate. Por ejemplo S1 en una determinada intersección los verdes conflictivos resultarán ser verde 1 con verde 2, verde 1 con verde 3, verde 2 con verde 5 y verde 4 con verde 8; se debe proceder de la siguiente manera: Poner un puente enchufable en la columna marcada 1 y la fila marcada 2. Idem columna 1 fila 3 Idem columna 2 fila 5 Idem columna 4 fila 8
2 X 3 X 4 5 X 6 7 8 X
1 2 3 4 5 6 7 Por otra parte se pueden seleccionar los rojos que se desean sensar colocando puentes enchufables en los RQ1 a RQ8 correspondientes al rojo 1 y al rojo 8 respectivamente. Finalmente existe otro puente que permite regular el tiempo de respuesta al conflicto. Este se debe colocar en la posición J1 (mayor velocidad) a J6 (menor velocidad de respuesta) con la consideración que en estas posiciones debe ponerse sólo un puente.
(Resuelve conflicto 1-2) (Resuelve conflicto 1-3) (Resuelve conflicto 2-5) (Resuelve conflicto 4-8)
Controlador de Tránsito CT-800d
39
7.7 Placas de comunicaciones En este caso son dos las posibilidades: Comunicaciones vía módem. Esta placa se conecta a la placa base a través del conector P3. comunicaciones vía lazos de 20 mA. Ésta se conecta a la placa base por medio de los conectores P3 y P4. En ambos casos la conexión al campo se realiza por medio de borneras ubicada en la placa base (ver descripción de borneras y conectores de placa base, EAL-3131).
7.8 Placa de display
Opcionalmente se puede instalar una placa que posee un display alfanumérico de 16 caracteres por 2 líneas (32 caracteres en total). Esta se conecta a la placa base por medio del conector P10.
Controlador de Tránsito CT-800d
40
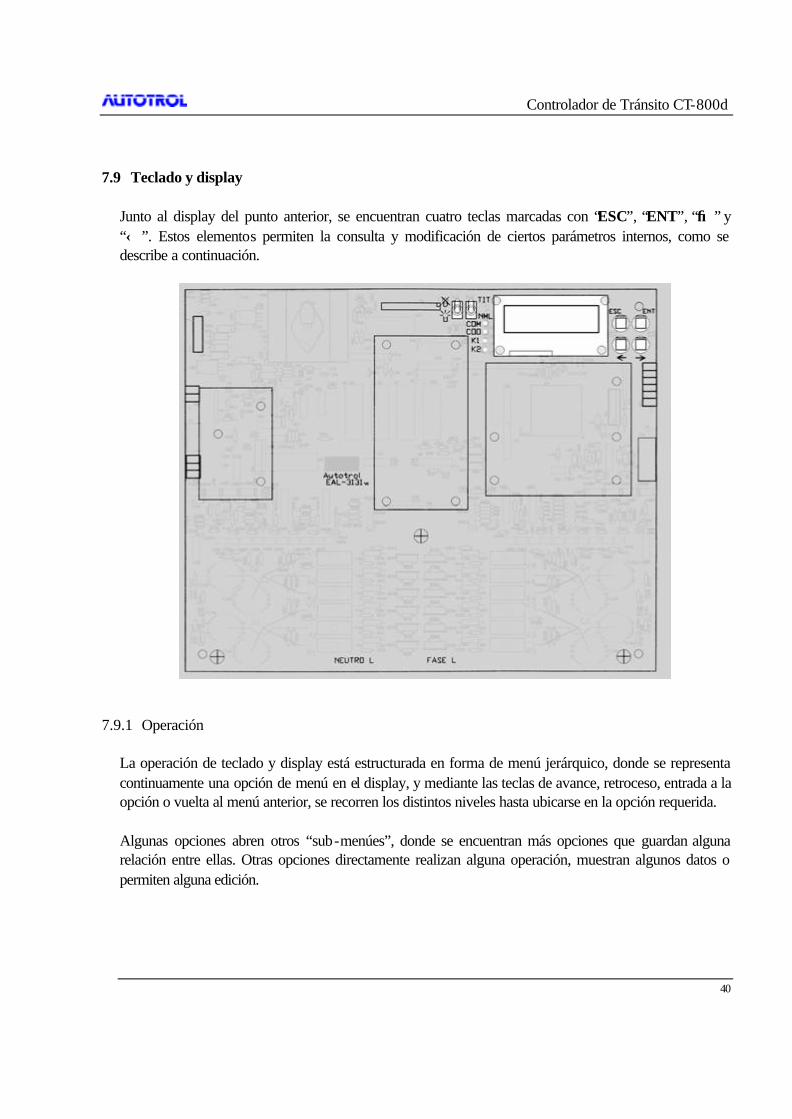
7.9 Teclado y display Junto al display del punto anterior, se encuentran cuatro teclas marcadas con “ESC”, “ENT”, “→” y “←”. Estos elementos permiten la consulta y modificación de ciertos parámetros internos, como se describe a continuación.
7.9.1 Operación La operación de teclado y display está estructurada en forma de menú jerárquico, donde se representa continuamente una opción de menú en el display, y mediante las teclas de avance, retroceso, entrada a la opción o vuelta al menú anterior, se recorren los distintos niveles hasta ubicarse en la opción requerida. Algunas opciones abren otros “sub-menúes”, donde se encuentran más opciones que guardan alguna relación entre ellas. Otras opciones directamente realizan alguna operación, muestran algunos datos o permiten alguna edición.
Controlador de Tránsito CT-800d
41
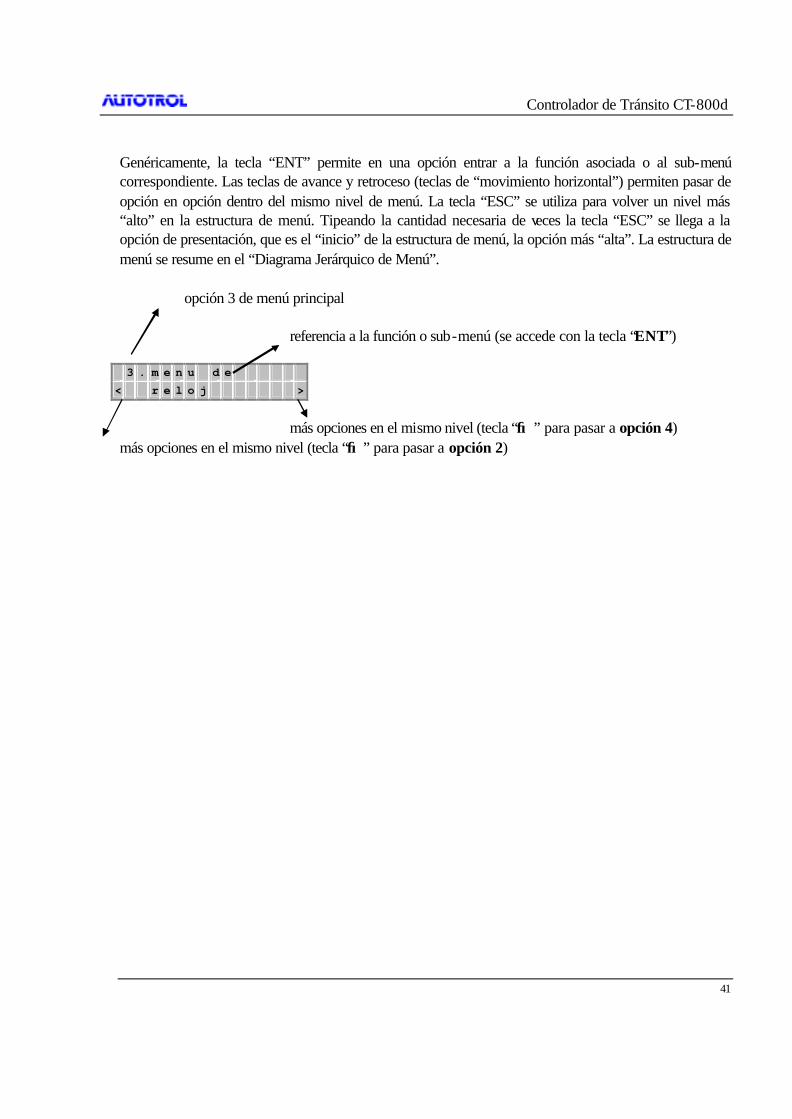
Genéricamente, la tecla “ENT” permite en una opción entrar a la función asociada o al sub-menú correspondiente. Las teclas de avance y retroceso (teclas de “movimiento horizontal”) permiten pasar de opción en opción dentro del mismo nivel de menú. La tecla “ESC” se utiliza para volver un nivel más “alto” en la estructura de menú. Tipeando la cantidad necesaria de veces la tecla “ESC” se llega a la opción de presentación, que es el “inicio” de la estructura de menú, la opción más “alta”. La estructura de menú se resume en el “Diagrama Jerárquico de Menú”. opción 3 de menú principal referencia a la función o sub-menú (se accede con la tecla “ENT”)
3 . m e n u d e < r e l o j >
más opciones en el mismo nivel (tecla “→” para pasar a opción 4) más opciones en el mismo nivel (tecla “→” para pasar a opción 2)
Controlador de Tránsito CT-800d
42
7.9.2 Referencia a la información del display del controlador
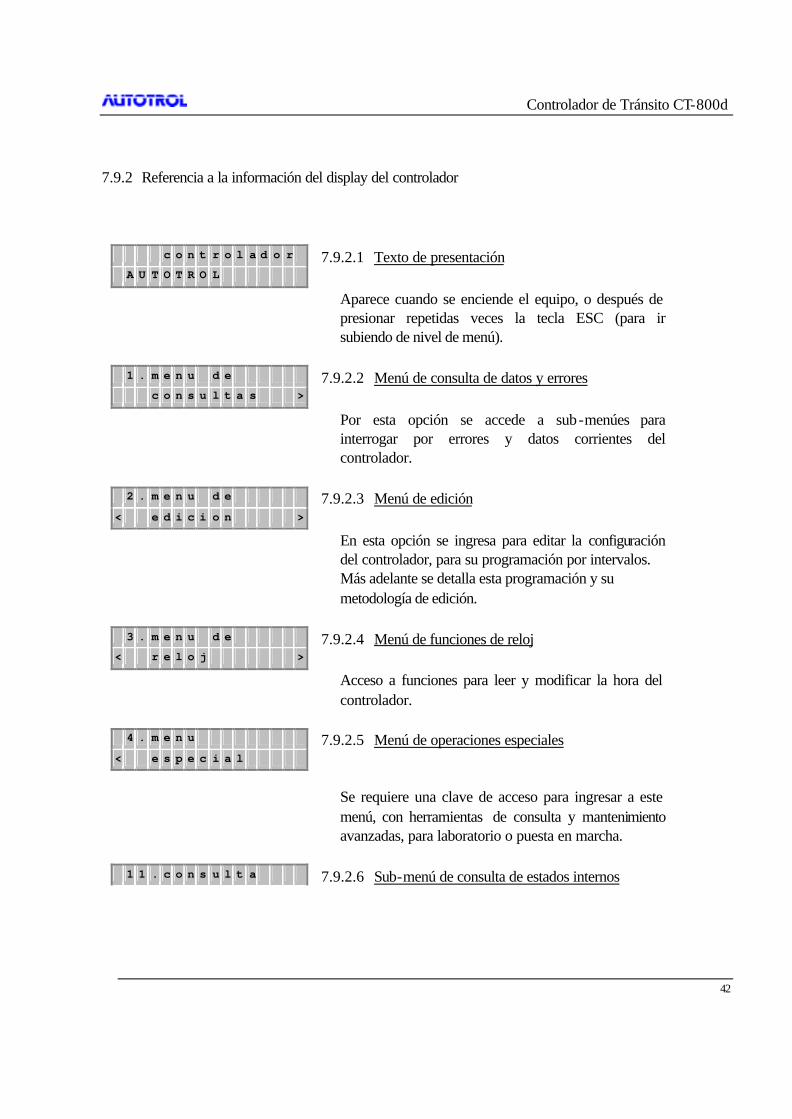
c o n t r o l a d o r 7.9.2.1 Texto de presentación A U T O T R O L Aparece cuando se enciende el equipo, o después de
presionar repetidas veces la tecla ESC (para ir subiendo de nivel de menú).
1 . m e n u d e 7.9.2.2 Menú de consulta de datos y errores c o n s u l t a s > Por esta opción se accede a sub-menúes para
interrogar por errores y datos corrientes del controlador.
2 . m e n u d e 7.9.2.3 Menú de edición < e d i c i o n > En esta opción se ingresa para editar la configuración
del controlador, para su programación por intervalos. Más adelante se detalla esta programación y su
metodología de edición.
3 . m e n u d e 7.9.2.4 Menú de funciones de reloj < r e l o j > Acceso a funciones para leer y modificar la hora del
controlador.
4 . m e n u 7.9.2.5 Menú de operaciones especiales < e s p e c i a l
Se requiere una clave de acceso para ingresar a este menú, con herramientas de consulta y mantenimiento avanzadas, para laboratorio o puesta en marcha.
1 1 . c o n s u l t a 7.9.2.6 Sub-menú de consulta de estados internos
Controlador de Tránsito CT-800d
43
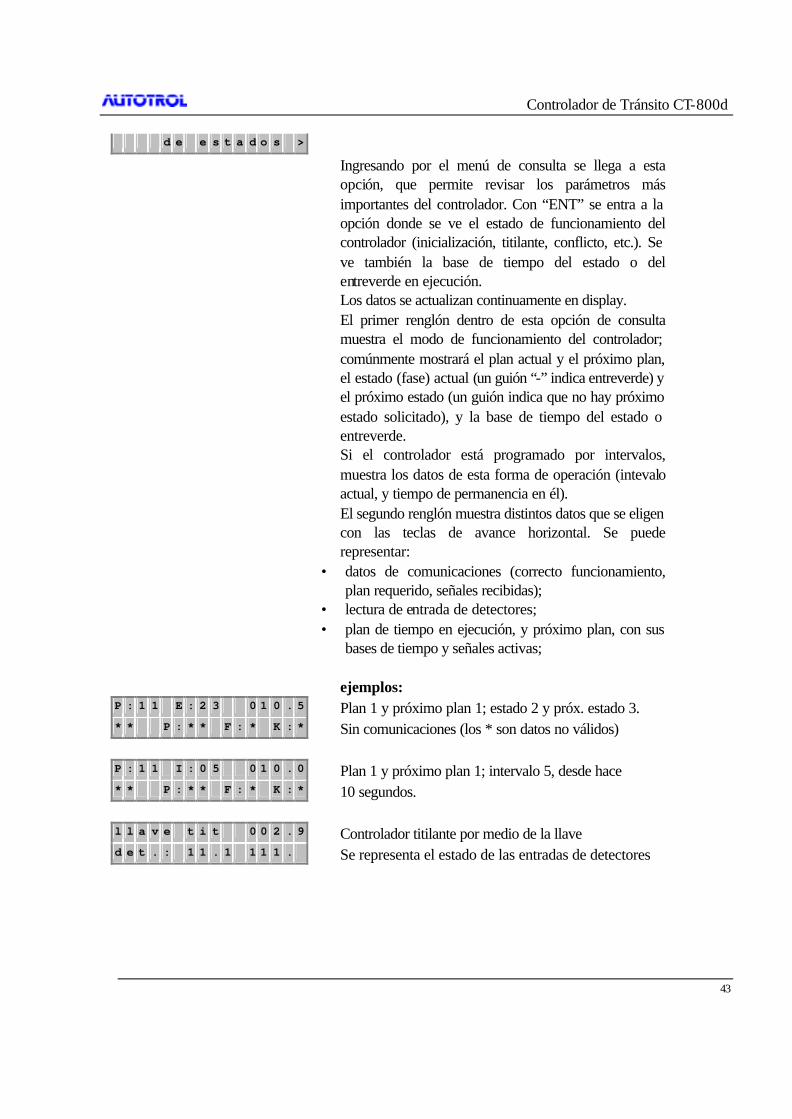
d e e s t a d o s > Ingresando por el menú de consulta se llega a esta
opción, que permite revisar los parámetros más importantes del controlador. Con “ENT” se entra a la opción donde se ve el estado de funcionamiento del controlador (inicialización, titilante, conflicto, etc.). Se ve también la base de tiempo del estado o del entreverde en ejecución. Los datos se actualizan continuamente en display. El primer renglón dentro de esta opción de consulta muestra el modo de funcionamiento del controlador; comúnmente mostrará el plan actual y el próximo plan, el estado (fase) actual (un guión “-” indica entreverde) y el próximo estado (un guión indica que no hay próximo estado solicitado), y la base de tiempo del estado o entreverde. Si el controlador está programado por intervalos, muestra los datos de esta forma de operación (intevalo actual, y tiempo de permanencia en él). El segundo renglón muestra distintos datos que se eligen con las teclas de avance horizontal. Se puede representar:
• datos de comunicaciones (correcto funcionamiento, plan requerido, señales recibidas);
• lectura de entrada de detectores; • plan de tiempo en ejecución, y próximo plan, con sus
bases de tiempo y señales activas;
ejemplos: P : 1 1 E : 2 3 0 1 0 . 5 Plan 1 y próximo plan 1; estado 2 y próx. estado 3. * * P : * * F : * K : * Sin comunicaciones (los * son datos no válidos) P : 1 1 I : 0 5 0 1 0 . 0 Plan 1 y próximo plan 1; intervalo 5, desde hace * * P : * * F : * K : * 10 segundos. l l a v e t i t 0 0 2 . 9 Controlador titilante por medio de la llave d e t . : 1 1 . 1 1 1 1 . Se representa el estado de las entradas de detectores
Controlador de Tránsito CT-800d
44
i n i c i a l i z 0 0 1 . 8 Controlador durante la inicialización d e t . : . . . . 1 1 1 e El detector 1 se encuentra en error (supera tiempos de presencia continua o sin activación)
1 2 . c o n s u l t a 7.9.2.7 Sub-menú de consulta de parámetros < p a r a m e t r o s > Presionando la tecla “ENT” se ve la versión propia de
la programación de tránsito almacenada en el controlador. Es una referencia a la programación específica asociada a la intersección.
[ 4 . 0 8 u s h u a ]
1 3 . c o n s u l t a 7.9.2.8 Sub-menú de consulta de errores < d e e r r o r e s > Opción que permite recorrer la memoria de registro de
alarmas, eventos y errores. Se muestra un error, con su fecha y hora de aparición, cada vez que se teclea el “ENT”. El error o evento está formado por un código y una pequeña descripción que acompaña al código.
0 6 / 1 1 / 9 8 2 2 : 2 3 6 Ejemplo de indicación de encendido del equipo. 0 0 0 0 1 e n c e n d i d o Se indica fecha, hora y día de la semana de ocurrido el evento. Mensajes que aparece cuando no hay errores s i n e r r o r e s almacenados. Con el próximo sub-menú de borra la memoria de
errores.
1 4 . b o r r a r 7.9.2.9 Opción para borrar los errores almacenados < e r r o r e s > Borra la totalidad de los errores almacenados en
memoria. Aunque no es necesaria esta operación, ya que la memoria es grande y se van reescribiendo los errores más viejos cuando la memoria está totalmente usada (quedando registrados siempre los últimos
Controlador de Tránsito CT-800d
45
errores), este procedimiento simplifica las rutinas de mantenimiento porque elimina datos viejos ya leídos y analizados.
1 5 . c o n s u l t a 7.9.2.10 Sub-menú de consulta versión de firmware < v e r s i o n Después de presionar la tecla “ENT” se ve una
información como la que sigue, donde se indica la versión corriente del firmware.
C T - 8 0 0 d 5 . 5 1 Versión 5.51 de controlador CT-800d. 2 2 / 0 4 / 2 0 0 4 Fecha de la versión.
1 6 . c o n s u l t a 7.9.2.11 Sub-menú de consulta de opciones < o p c i o n e s 1 6 1 . i n f o No habilitado en este modelo. h a r d w a r e > 1 6 2 . i n f o Se puede ver el valor de la dirección del equipo. < d i r e c c i o n > Este es un parámetro requerido en algunos protocolos de comunicaciones. 1 6 3 . a j u s t e s No habilitado en este modelo. < p o t . n o m i n . > 1 6 4 . p a r a m . No habilitado en este modelo. < p o t . n o m i n .
2 1 . p a r a m e t r i z a r 7.9.2.12 Menúes de parámetros a t r i b u t o s > Son tres menúes de funciones limitadas. Muestran información de parámetros internos del
controlador. Sólo habilitado para uso interno. n o h a b i l i t a d o p a r a e s t e m o d e l o
Controlador de Tránsito CT-800d
46
3 1 . r e l o j 7.9.2.13 Sub-menúes referidos al reloj de tiempo real c o n s u l t a > Presionando “ENT” se representa el valor de fecha y
hora, actualizándose continuamente en display hasta que se presiona otra tecla para volver al menú.
V I E 0 6 - 1 1 - 1 9 9 8 2 3 : 2 1 : 2 7 . 0 3 2 . r e l o j < m o d i f i c a c . Presionando “ENT” se pasa a la edición de la nueva fecha y hora. Esta edición consta de dos etapas: V I E 0 6 - 1 1 - 1 9 9 8 * * En la primera, se modifica la fecha. Se visualiza solamente la fecha, en el primer renglón; en
el segundo, unos asteriscos indican la cifra que se puede modificar; con las teclas de avance y retroceso (“→” y “←”) se incrementa o decrementa el valor. En el ejemplo de la izquierda se modifica el mes; con “ENT” se selecciona la siguiente cifra a editar (año en este caso); con “ESC” se interrumpe el proceso, sin registrar cambios.
* * 2 3 : 2 1 : 0 0 . 0 Segunda etapa, edición de hora. Aquí se puede editar la hora y los minutos, no así los
segundos que quedan en 0.
4 . m e n u 7.9.2.14 Menú de funciones especiales < e s p e c i a l En este menú se requiere una clave de acceso para
continuar. Permite ingresar a funciones especiales de transferencia (lectura de datos de memoria, transferencia bidireccional por el puerto serie de programación).
Controlador de Tránsito CT-800d
47
7.9.3 Edición de la programación por intervalos
7.9.3.1 Generalidades
Algunas opciones abren otros “sub-menúes”, donde se encuentran más opciones que guardan alguna relación entre ellas. Otras opciones directamente realizan alguna operación, muestran algunos datos o permiten alguna edición. El controlador está preparado para ser programado por intervalos en forma directa a través del teclado incorporado. En el display de cristal líquido se visualiza paso a paso el progreso de la edición del programa. Se entra en esta edición mediante la opción 2 del menú principal que se detalló en el capítulo anterior. La programación implica el ingreso de datos, que según el carácter de los mismos, se los puede separar en tres grupos bien diferenciables:
• en primer lugar, los datos referentes a los movimientos o grupos de semáforos que señalizan el cruce;
• por otro lado es necesario el ingreso de datos relacionados con los planes de tiempo que
gobiernan la intersección. Estos planes incluyen información sobre la estructura y duración de cada movimiento; y
• el último grupo de datos, consiste en la información referente a la tabla horaria, que elige los
planes de tiempo y estados de acuerdo a la hora del día y del día de la semana.
7.9.3.2 programación por teclado y display
Para programar al controlador, se debe acceder al menú de edición, que forma parte del menú principal.
Pulsando la tecla “ENT”, se informa la existencia de un programa anterior (sólo si lo hay), y se presenta la opción de editar un nuevo programa o modificar el existente.
2 . m e n u d e< e d i c i o n >
Controlador de Tránsito CT-800d
48
En el caso que no exista programa en memoria esta pantalla no se visualiza y el controlador entra automáticamente al menú de edición para iniciar la programación. Pulsando “ESC” se vuelve al menú principal. Con “ENT” se carga el programa editado previamente, para posibilitar su modificación. Presionando “←” se accede al menú de edición para comenzar una nueva edición. Dentro del menú de edición, el controlador cuenta con las siguientes posibilidades de edición :
Para desplazarse de un menú a otro se utilizan las teclas “→” y “←”, para entrar en uno de los menúes se da el comando “ENT”. Para volver al menú edición pulsar “ESC”.
7.9.3.3 menú “edición de grupos” El controlador está preparado para comandar hasta 8 movimientos o grupos de señal. La edición de grupos es el primer paso en la realización de un programa de tránsito. Este menú permite definir la cantidad de grupos de señal a programar y la característica vehicular, vehicular secundario (referido al modo titilante), o peatonal de cada uno. En primer lugar se ingresa el número de grupos semafóricos que señalizarán la intersección, con valores válidos entre 2 y 8.
e d i c . n u e v a [ R E T ]mo d i f i c . [ E N T ]
2 1 . e d i c i o n d e g r u p o s >
2 2 . e d i c i o n d e< p l a n e s >
2 3 . e d i c i o n d e< t . h o r a r i a >
Controlador de Tránsito CT-800d
49
Con las flechas “→” y “←”, se incrementa/decrementa el número en display. Para volver al menú de edición pulsar “ESC”. Presionando “ENT”, se confirma el número indicado en pantalla y se pasa a la pantalla donde se caracteriza cada grupo.
Pulsando “ESC” se vuelve a la pantalla anterior (cambiar cantidad). Con “→” y “←” se cambia entre vehicular, vehicular secundario y peatonal. “ENT” valida el tipo de grupo y pasa al siguiente. “ENT” en el último grupo, vuelve al menú de edición. Nota: Si al momento de ingresar en la edición de grupos hay planes editados, la edición de grupos queda limitada a la modificación del número de grupos, no pudiéndose modificar el tipo de grupo. En este caso, se podrá revisar la característica de cada grupo, pero ninguna de las modificaciones del tipo de grupo que efectúe el usuario tendrá efecto. Esta limitación tiene por fin evitar errores que pueden ser críticos durante la programación del controlador.
7.9.3.4 menú “edición de planes” Antes de entrar a la “edición de planes”, es conveniente haber definido con anterioridad los datos del menú “edición de grupos”, concernientes al número y tipo de grupos que conforman la intersección. En caso contrario, el controlador asume por omisión que se trata de un cruce simple (2 grupos de tipo vehicular). La edición de un plan de tránsito, consiste en la construcción de una secuencia de intervalos. Cada intervalo tiene asociado un tiempo de duración y la señal luminosa para cada grupo semafórico. La suma de las duraciones de todos los intervalos que conforman un plan definen el “largo de ciclo” del mismo. En cada plan pueden programarse hasta 32 intervalos. El controlador permite la programación de hasta 32 planes de tránsito.
c a n t i d a d d e g r u p o s 0 5
g r u p o 0 1 v e h i c u l a r
Controlador de Tránsito CT-800d
50
7.9.3.4.1 descripción de los campos en pantalla
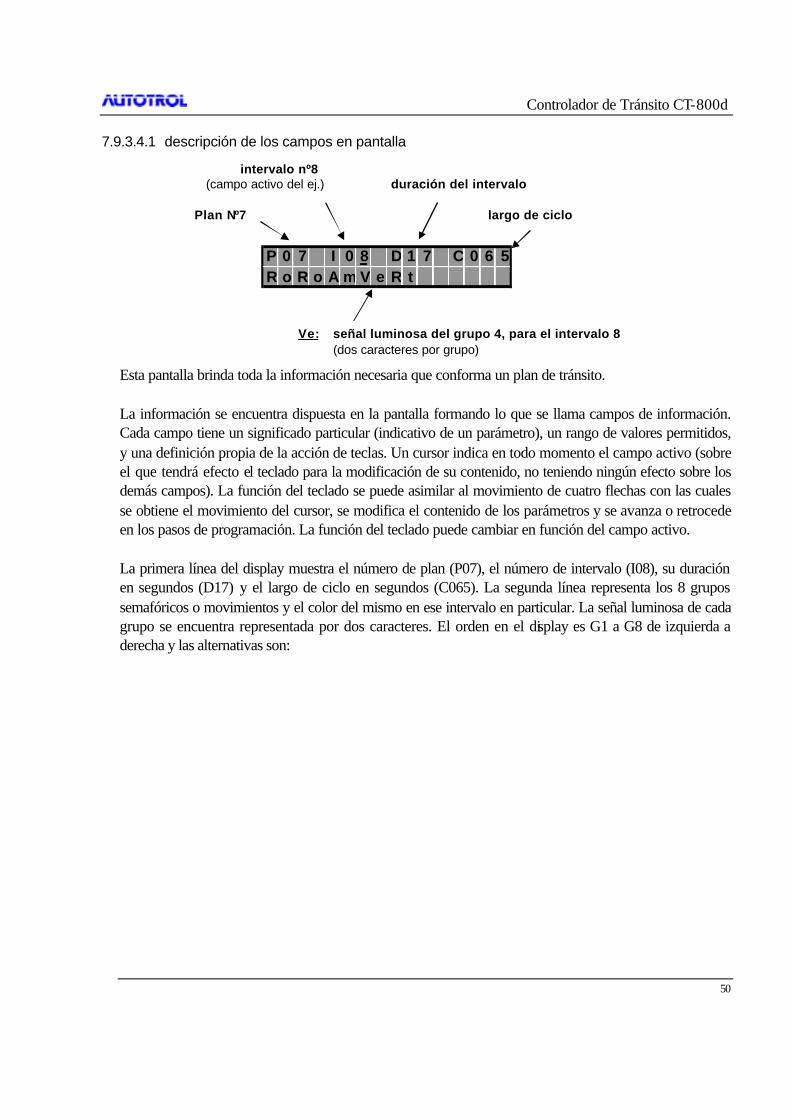
intervalo nº8 (campo activo del ej.) duración del intervalo
Plan Nº7 largo de ciclo
Ve: señal luminosa del grupo 4, para el intervalo 8 (dos caracteres por grupo)
Esta pantalla brinda toda la información necesaria que conforma un plan de tránsito. La información se encuentra dispuesta en la pantalla formando lo que se llama campos de información. Cada campo tiene un significado particular (indicativo de un parámetro), un rango de valores permitidos, y una definición propia de la acción de teclas. Un cursor indica en todo momento el campo activo (sobre el que tendrá efecto el teclado para la modificación de su contenido, no teniendo ningún efecto sobre los demás campos). La función del teclado se puede asimilar al movimiento de cuatro flechas con las cuales se obtiene el movimiento del cursor, se modifica el contenido de los parámetros y se avanza o retrocede en los pasos de programación. La función del teclado puede cambiar en función del campo activo. La primera línea del display muestra el número de plan (P07), el número de intervalo (I08), su duración en segundos (D17) y el largo de ciclo en segundos (C065). La segunda línea representa los 8 grupos semafóricos o movimientos y el color del mismo en ese intervalo en particular. La señal luminosa de cada grupo se encuentra representada por dos caracteres. El orden en el display es G1 a G8 de izquierda a derecha y las alternativas son:
P 0 7 I 0 8 D 1 7 C 0 6 5R o R o A m V e R t
Controlador de Tránsito CT-800d
51
para grupo vehicular: para grupo peatonal:
Ro : ROJO Ve : VERDE
Am: AMARILLO Ro: ROJO
Ve : VERDE Rt : ROJO TITILANTE
RA: ROJO-AMARILLO Vt : VERDE TITILANTE
Vt : VERDE TITILANTE Ap : APAGADO
En la primera pantalla se selecciona uno de los 32 planes para ser editado, sobre el que se efectuarán todas las modificaciones.
“ENT” para validar el número de plan y acceder a la pantalla de edición de plan de tránsito. En el comienzo de la edición de un plan el cursor se sitúa en el campo ‘intervalo’ , indicando que es el campo activo, y toma el valor 1. Esto significa que la información de los demás campos (duración, luces), está referida al primer intervalo. Si no existen intervalos editados para este plan, el campo duración toma valor 0, y el campo de luces, aparece tachado con líneas. Las teclas “→” y “←” permiten incrementar o decrementar respectivamente el número de intervalo. De esta manera, es posible recorrer los intervalos existentes desde el primero hasta uno más que el último. En caso de no existir intervalo, estas teclas no tienen efecto y el campo estará fijo en el valor 1 hasta que se complete un intervalo, donde toma automáticamente el valor 2. A medida que se recorren los intervalos, se actualizan los demás campos con los valores de duración y salida de luces correspondientes al intervalo visualizado. Pulsando “ESC”, pasa a la pantalla para edición de desfasaje y punto de sincronismo descripta más adelante. Para pasar a editar un intervalo se presiona “ENT”.
e d i t a r p l a n 0 7
Controlador de Tránsito CT-800d
52
En esta instancia pueden suceder dos cosas distintas dependiendo de que el intervalo a editar exista (haya sido previamente editado) o no. Si el intervalo existe, se presenta la siguiente opción en pantalla:
Con “ENT” se pasa a modificar su contenido. Con “→” se pasa a editar un intervalo nuevo que será insertado delante del seleccionado. En el caso que el intervalo no tenga contenido la opción anterior no se presenta, y pasa directamente a la edición del intervalo nuevo. En todos los casos el cursor pasa al campo ‘D’.
En el campo ‘D’ se señala el tiempo de duración en segundos para un intervalo (nro. 1 en la figura), del plan correspondiente (nro. 7 de la figura). La función de las teclas en este campo se describe a continuación: El incremento y decremento del tiempo se realiza con las teclas “→” y “←” respectivamente, y puede tomar valores entre 0 y 99. “ESC” vuelve el cursor al campo ‘I’, anulando las modificaciones. Con “ENT” se acepta el valor del campo (siempre que sea distinto de 0), y activa el campo de luces para edición. En ningún caso se toma por válido un intervalo con duración 0. Un intervalo editado previamente, puede ser borrado. Si se entra por la opción modificar intervalo existente, y se ingresa el valor duración 0, se produce el borrado del intervalo y el cursor vuelve al campo ‘I’, apuntando al intervalo que estaba a continuación del borrado. Si en cambio se está editando un nuevo intervalo, y se ingresa un valor de duración 0, la tecla “ENT” no produce ningún efecto. El largo de ciclo visualizado en el campo ‘C’, se actualiza automáticamente incrementándose en el valor del campo duración.
P 0 7 I 0 1 D 1 5 C 0 0 0
P 0 7 I 0 3 D 2 3 C 0 8 3m o d [ E N T ] i n s [ A V ]
Controlador de Tránsito CT-800d
53
El campo de edición de luces tiene dos letras por grupo. Cuando se ingresa a editar este campo, el cursor se posiciona en el extremo inferior izquierdo de la pantalla, apuntando al primer grupo semafórico. Las teclas “→” y “←” permiten modificar las señales luminosas para cada grupo, tomando en cada caso las luces permitidas para el grupo, según su característica vehicular/peatonal definida anteriormente como tipo de grupo en el menú “edición de grupos”. La tecla “ESC”, tiene la función de anular la edición del grupo activo devolviendo el contenido que poseía previamente, y volver el cursor al grupo anterior. Presionando sucesivamente se cancela la edición de luces y el cursor vuelve al campo duración. Con “ENT” se valida la señal y se pasa al siguiente grupo. Esta acción se repite así hasta el ultimo grupo ( nro. que fue definido previamente en la pantalla “cantidad de grupos” dentro del menú “edición de grupos”), donde luego de aceptar la señal de éste, se considera completa la edición del intervalo y el cursor pasa al campo ‘I’, apuntando al siguiente intervalo. Cuando el cursor está en el campo Intervalo, pulsando “ESC”, se pasa a la pantalla de edición de desfasaje y punto de sincronismo que se describe a continuación.
7.9.3.4.2 desfasaje, punto de sincronismo y tiempo máximo de espera Concluida la edición de los intervalos constituyentes de un plan, sólo resta definir cuáles son las condiciones operativas del controlador: si funciona aislado o si se encuentra dentro de un sistema, en sincronismo con otros controladores. En el primer caso (aislado), no será necesaria la edición de estos parametros, ya que por defecto el controlador asume que trabaja aislado (como muestra la figura) y bastará con aceptar (pulsar “ENT”) sucesivamente hasta salir de la edición del plan.
En el segundo caso (en sincronismo), se debe determinar si el sistema se encuentra sincronizado por reloj interno o mediante un vínculo físico (cableado), de manera de decidir por editar desfasaje, punto de sincronismo y tiempo máximo de espera.
P 0 7 I 0 1 D 1 5 C 0 1 5R A
P 0 7 C 0 1 5 d e s f a s a j e
Controlador de Tránsito CT-800d
54
Por medio de las teclas “→” “←” se ajusta el tiempo en segundos desde cero hasta el “largo de ciclo –1”, o se deshabita “---“ , presionando “ENT” se acepta el tiempo mostrado en pantalla. Con “ESC” se vuelve a la pantalla de edición de intervalos.
7.9.3.5 menú “edición de tabla horaria” Éste es el último paso en la edición de un programa de tránsito. Consiste en indicarle al controlador en qué momento del día y qué día de la semana, entrarán en funcionamiento los planes que fueron programados. En forma más específica, se define qué plan o estado del controlador, tiene vigencia de acuerdo a la hora del día, y el día de la semana. Estos datos en su conjunto conforman una “entrada” o “renglón”, de la tabla horaria. La edición de esta tabla no es obligatoria, y en caso de no existir entrada el controlador asumirá como estado de funcionamiento, el plan 1, para todos los días de la semana. A continuación se muestra una pantalla típica de la tabla horaria con todos los campos que la conforman.
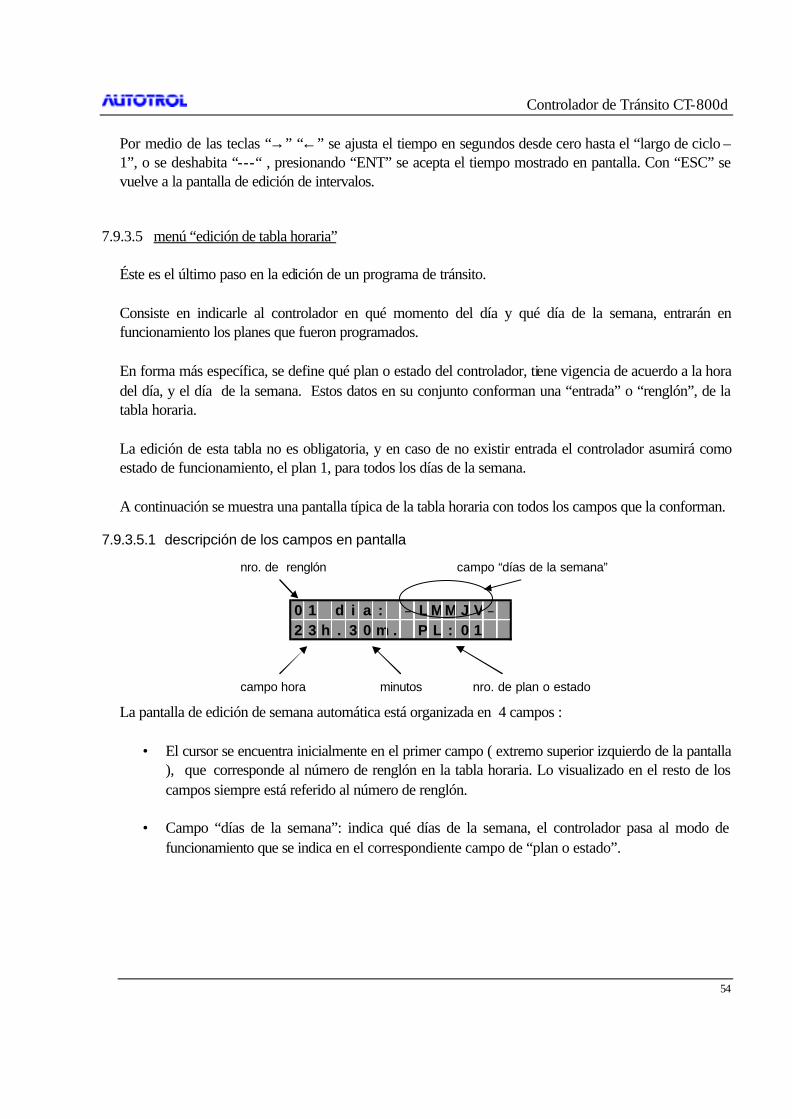
7.9.3.5.1 descripción de los campos en pantalla
nro. de renglón campo “días de la semana”
campo hora minutos nro. de plan o estado
La pantalla de edición de semana automática está organizada en 4 campos :
• El cursor se encuentra inicialmente en el primer campo ( extremo superior izquierdo de la pantalla ), que corresponde al número de renglón en la tabla horaria. Lo visualizado en el resto de los campos siempre está referido al número de renglón.
• Campo “días de la semana”: indica qué días de la semana, el controlador pasa al modo de
funcionamiento que se indica en el correspondiente campo de “plan o estado”.
0 1 d i a : L MM J V 2 3 h . 3 0 m . P L : 0 1
Controlador de Tránsito CT-800d
55
• Campo “hora, minutos”, indica la hora del día que el controlador pasa al estado o plan que se indica en el campo “estado o plan”.
• En este campo se coloca el plan o estado de funcionamiento del controlador. Las posibilidades
son los planes que fueron editados y los estados de intermitencia y apagado.
7.9.3.6 edición de la semana automática Al ingresar en la edición de la tabla horaria, la pantalla muestra la información correspondiente al primer renglón de la tabla. El cursor se sitúa inicialmente en el primer campo que corresponde al renglón en la tabla horaria. Un nuevo renglón, se encuentra: con todos los días de la semana deshabilitados (guiones), con el campo de hora y minutos en 0 y con el campo “plan/estado”, en el estado de apagado. Situados en el campo renglones con “→” o “←”, se recorren los distintos renglones, hasta uno más que el último definido. Con “ENT”, se entra a editar o modificar el renglón, según sea un renglón nuevo o existente. El cursor pasa al primer elemento del campo “días de la semana” (corresponde al día domingo), para indicar los días de vigencia del corriente renglón. Con “→” y “←”, se recorren los 7 días. Con “ENT” se cambia de deshabilitado (guión “—“), a habilitado ( día correspondiente “D”, “L”, “M”, etc.) , y viceversa. Con “→”, después del último día (sábado) se valida el contenido del campo “días” y pasa el cursor al siguiente campo para editar la hora. Por medio de las teclas “→” y “←”, se incrementa o decrementa la hora en el display. “ENT” valida hora y pasa al campo minutos, donde se procede de la misma forma que para la hora. Pulsando “ENT”, se accede al campo de “plan/estado”, donde se recorren por medio de “→” y “←” en forma ordenada los planes que fueron editados hasta el momento y los estados titilante y apagado. Presionando “ENT” , se confirma que toda la edición del renglón contenida en la pantalla es válida quedando guardado en memoria y el cursor se vuelve a ubicar en el campo “numero de renglón”, pero ahora apuntando al renglón siguiente de la tabla. Vale destacar que en cualquier punto de la edición, se puede utilizar la tecla “ESC” para volver un paso atrás en la edición, lo que permite la corrección de errores previos, o para deshacer la edición entera de un renglón.

Controlador de Tránsito CT-800d
56
Controlador de Tránsito CT-800d
57
7.9.3.7 salida de menú de edición Al ingresar en la edición de la tabla horaria, el movimiento en la estructura de menúes se restringe un poco: no es posible salir del menú 2 en forma normal con la tecla “ESC”. Es necesario ir a la opción 2-4 de salida de edición, ya sea que se quiere ‘abortar’ la edición corriente, o se quiere aceptar y grabar definitivamente. En esta opción se encuentra la siguiente selección:
Si se opta por SÍ, el controlador entra en estado intermitente por unos segundos, mientras se visualiza la siguiente inscripción:
Posteriormente, se resetea automáticamente, recomenzando su ejecución con los nuevos parámetros recién actualizados. Ante cualquier error (falta de datos necesarios) en el ingreso previo, la actualización no se lleva a cabo, aparece un mensaje indicando la falla, y el controlador sigue en el menú de edición, dando así la posibilidad de corregir la falta, o abortar definitivamente la edición.
g r a b a r ? S I [ E N T ] NO [ E S C ]
e j e c u t a n d o f u n c i o n e n R AM

Controlador de Tránsito CT-800d
58
DIAGRAMA JERARQUICO DE MENUEste símbolo representa el cambio que se produce dentro del menú al presionar la tecla ENT
Este símbolo muestra el movimiento en el menú mediante las teclas de desplazamiento horizontal
Con la tecla ESC se sube un nivel en el menú
NOTA: En letra negra se representa la opción de menú; en letra clara se muestran ejemplos con datos variables
c o n t r o l a d o r visualización al encender el equipoA U T O T R O L
1 . m e n u d e 2 . m e n u d e 3 . m e n u d e 4 . m e n u c o n s u l t a s > < p a r a m e t r o s > < r e l o j > < e s p e c i a l
i n g r e s e c l a v e d ea c c e s o 0 0 0 0 0 0 0 1
3 1 . r e l o j 3 2 . r e l o j c o n s u l t a > < m o d i f i c a c .
V I E 0 6 - 1 1 - 1 9 9 8 V I E 0 6 - 1 1 - 1 9 9 8 2 3 : 2 1 : 2 7 . 0 * *
2 1 . p a r a m e t r i z a r 2 2 . p a r a m e t r i z a r 2 3 . p a r a m e t r i z a r a t r i b u t o s > < g r u p . s e m a f . > < d i r e c c i o n
s e n s . s a l i d a s m o d o : s a t e l i t e r e l o j R A M . 2 d i r e c c i o n : 9 9
1 1 . c o n s u l t a 1 2 . c o n s u l t a 1 3 . c o n s u l t a 1 4 . b o r r a r d e e s t a d o s > < d e p a r a m t r . > < d e e r r o r e s > < e r r o r e s >
P : 1 1 E : 2 3 0 1 0 . 5 * * P : * * F : * K : * [ 4 . 0 8 u s h u a ] s i n e r r o r e s
Controlador de Tránsito CT-800d
59
7.10 Leds A la izquierda del display se encuentran 4 leds marcados “COM”, “COO”, “K1” y “K2”. La función de los mismos se describe a continuación: Los leds al lado del display, junto con los leds de los módulos de potencia, permiten un rápido diagnóstico del modo de funcionamiento del equipo. El led superior, identificado como “COM”, se enciende cuando se reciben mensajes por la línea de comunicaciones de campo (al Controlador Maestro, a un Centro de Control, a otro controlador CT-800d o CT-800i), ya se trate de comunicaciones vía módem, o con un protocolo en lazo de corriente. El segundo LED, “COO”, indica que el controlador está “coordinado”, o “sincronizado”, a una red (no sólo recibe comunicaciones sino que también las interpreta y se adecua en concordancia). Los últimos dos Led’s corresponden a las señales K1 y K2 de ciertos protocolos de comunicaciones. Cuando el controlador está coordinado con un sistema que genera K1 y K2 (por ejemplo, el sistema Philips o el Sistema de Control de Tránsito Autotrol), estos Leds informan de la presencia de dichas señales. En caso contrario, los Leds permanecen encendidos. Un controlador aislado tendrá los dos primeros Leds apagados, y los dos últimos Leds encendidos.

Controlador de Tránsito CT-800d
60
7.11 Llaves de comando
7.11.1 Llave titilante
Por medio de esta llave el controlador funcionará en modo titilante (posición “TIT”) o en ciclo o modo normal (posición “NML”). Si el controlador hubiera entrado en conflicto esta llave permite sacarlo de ese estado (si se subsanó el
problema que lo llevó a dicho estado), pasando primero a “TIT” y luego a “NML”.
7.11.2 Llave apagado de lámparas
Por medio de esta llave se inhibe el disparo de los triac’s pudiéndose monitorear el funcionamiento del equipo sin encender las lámparas. Opcionalmente y con el agregado de un contactor se puede cortar la energía eléctrica en las lámparas en forma segura. Como medida de seguridad, cuando se habilita la salida de lámparas el controlador realiza la secuencia de encendido (titilante inicial, rojo integral inicial).
Controlador de Tránsito CT-800d
61
7.12 Descripción de borneras y conectores de placa base Borneras y conectores en placa base EAL-3131
P1 1-entrada alterna 14 V. 2-entrada punto medio. 3-entrada alterna 14 V. 4-entrada alterna 23 V. 5-entrada alterna 23 V. BR3 1-salida fuente auxiliar (negativo). 2-salida fuente auxiliar (positivo). BR2 1-salida relé auxiliar ,contacto común. 2-salida relé auxiliar ,contacto normal cerrado. 3-salida relé auxiliar ,contacto normal abierto. BR1 1-Tx +. 2-Tx -. 3-Rx +. 4-Rx -. 5-salida fuente auxiliar (positivo). 6-salida fuente auxiliar (negativo). P2 Conector para RS-232. 1-DCD. 2-Rx. 3-Tx. 4-DTR (5 V). 5-GND. 6-Libre (DSR). 7-RTS. 8-CTS. 9-+5 V / RI.
Controlador de Tránsito CT-800d
62
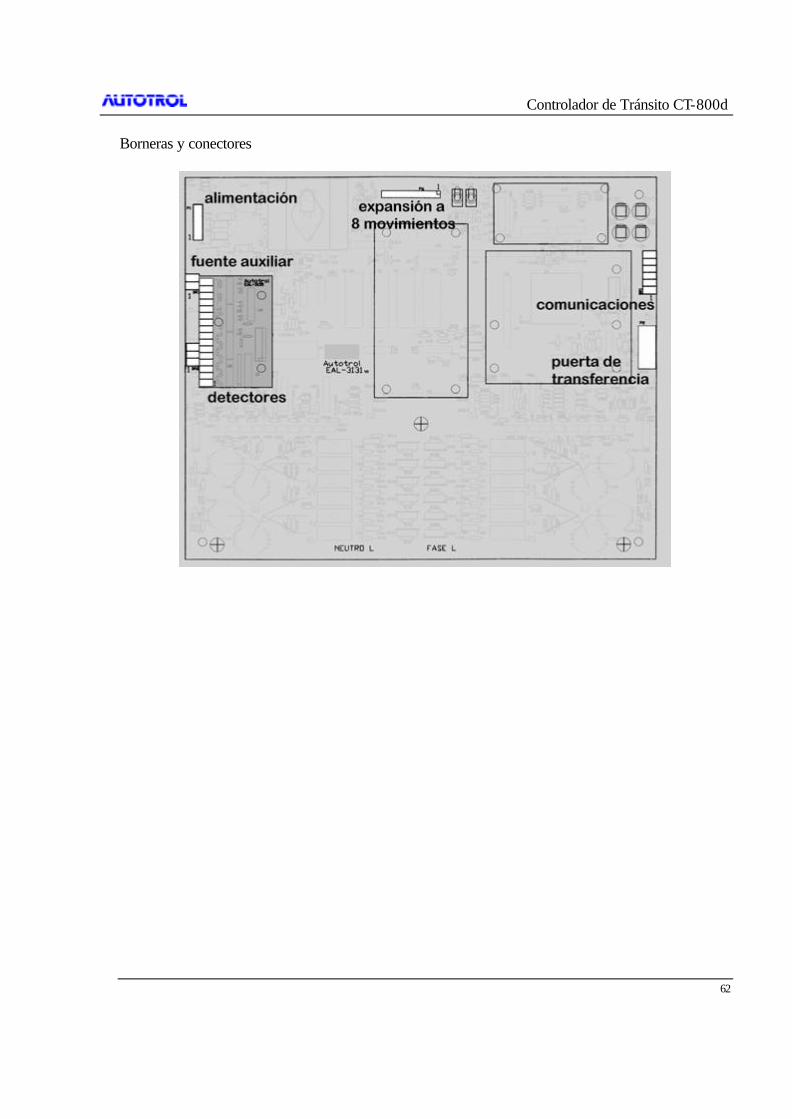
Borneras y conectores
Controlador de Tránsito CT-800d
63
8. CONTROLADOR CT-800D COMO AFORADOR DE TRÁNSITO Esta característica de controlador CT-800d permite almacenar datos estadísticos recolectados de los detectores vehiculares. El controlador dispone de 8 canales de aforo, programables por el usuario para mejor aprovechamiento del espacio de almacenamiento. Por canal se selecciona su condición de habilitado o deshabilitado y, para los canales habilitados, el detector asociado y las variables a registrar. Estas variables pueden ser:
Volumen: Cantidad de vehículos detectados en un intervalo de tiempo; Ocupación: Proporción de tiempo ocupado sobre tiempo total (intervalo prefijado).
Además se puede elegir el intervalo de almacenamiento, entre los siguientes valores:
1min , 5min , 15min , 30min y 1h.
La capacidad de almacenamiento, en días registrados, está condicionada al número de canales habilitados, al número de variables almacenadas por canal y al intervalo de medición. Como ejemplo, con un intervalo de 15min y 4 canales registrando volumen y ocupación, se tendrán datos de las últimas tres semanas. Un detallado control de errores y una metodología de ajuste de datos resulta en una alta confiabilidad para la información obtenida, aun cuando el controlador esté expuesto a periódicos cortes de energía que de otra manera invalidarían las mediciones.
Controlador de Tránsito CT-800d
64
9. CONTROLADOR CT-800D PARA ACCIONAR CARTELES DE MENSAJE VARIABLE
El controlador CT-800d permite accionar indicadores de velocidad máxima. En un modo local de funcionamiento del controlador, éste selecciona una velocidad para representar en el cartel de acuerdo a su tabla horaria y condiciones de funcionamiento (plan de tránsito vigente). En un modo interconectado, el controlador provee un vínculo entre el cartel y el Centro de Control mediante el protocolo adecuado. El controlador puede comandar hasta dos carteles independientes, con un retorno que indica al CT-800d el estado de funcionamiento de cada cartel.
Controlador de Tránsito CT-800d
65
10. DETECCIÓN DE LÁMPARA QUEMADA (Opcional) Un opcional de hardware y software brinda al CT-800d una sofisticada característica de detección de una lámpara quemada. Este agregado permite conocer cuándo se quemó alguna lámpara en la instalación. No tiene los requerimientos de seguridad de la detección de ausencia de rojos en un movimiento; es solamente informativo, pero es particularmente interesante para equipos interconectados a un Centro de Control, donde aparece una alarma para que un operador avise al grupo de mantenimiento correspondiente. Este opcional requiere un detallado circuito de hardware, así como un cuidadoso procesamiento por software, donde se presenta un “modo aprendizaje” que permite registrar el estado “nominal”, con todas las lámparas en correcto funcionamiento, contra el cual se compara en el “modo normal” de operación. Además, utiliza una función de compensación ante variaciones de la tensión de alimentación. El modo de funcionamiento –aprendizaje, normal– puede seleccionarse mediante el teclado y display propios del controlador, sin requerimiento de equipo adicional, para facilitar la operatoria cuando debe un nuevo “aprendizaje” ante cambios en la instalación, por ejemplo en la potencia de las lámparas instaladas. En el display del controlador se puede leer el estado de las salidas de los grupos semafóricos, donde se indica para cada salida de lámparas si se encuentra ante una merma en la potencia instalada, indicando la condición de una o más lámparas quemadas. También en el display del controlador puede verse la tensión de alimentación. Todas las operaciones de aprendizaje, lectura, generación de alarmas y reprogramación pueden ser ejecutadas y monitoreadas desde un Centro de Control, según protocolo de comunicaciones.
Controlador de Tránsito CT-800d
66
11. MECÁNICA Y MONTAJE
11.1 Mecánica El gabinete del controlador CT-800d viene en distintas versiones y montajes de acuerdo a requerimientos del cliente. Básicamente consiste en montaje sobre pedestal (buzón) o sobre columna. De acuerdo a requerimientos de seguridad, el controlador se provee con simple o doble cerradura y protecciones mecánicas de accesos a la programación y mantenimiento. El gabinete está construido en chapa de hierro de 2mm de espesor, 480mm de largo por 715 mm de alto y 170mm de profundidad. El gabinete cumple con los requisitos de protección IP-53; esto significa protección contra el polvo, sin precipitación de sedimentos perjudiciales en elementos sensibles y contra el agua de lluvia cayendo en forma de lluvia hasta un ángulo menor o igual a 60º de la vertical.
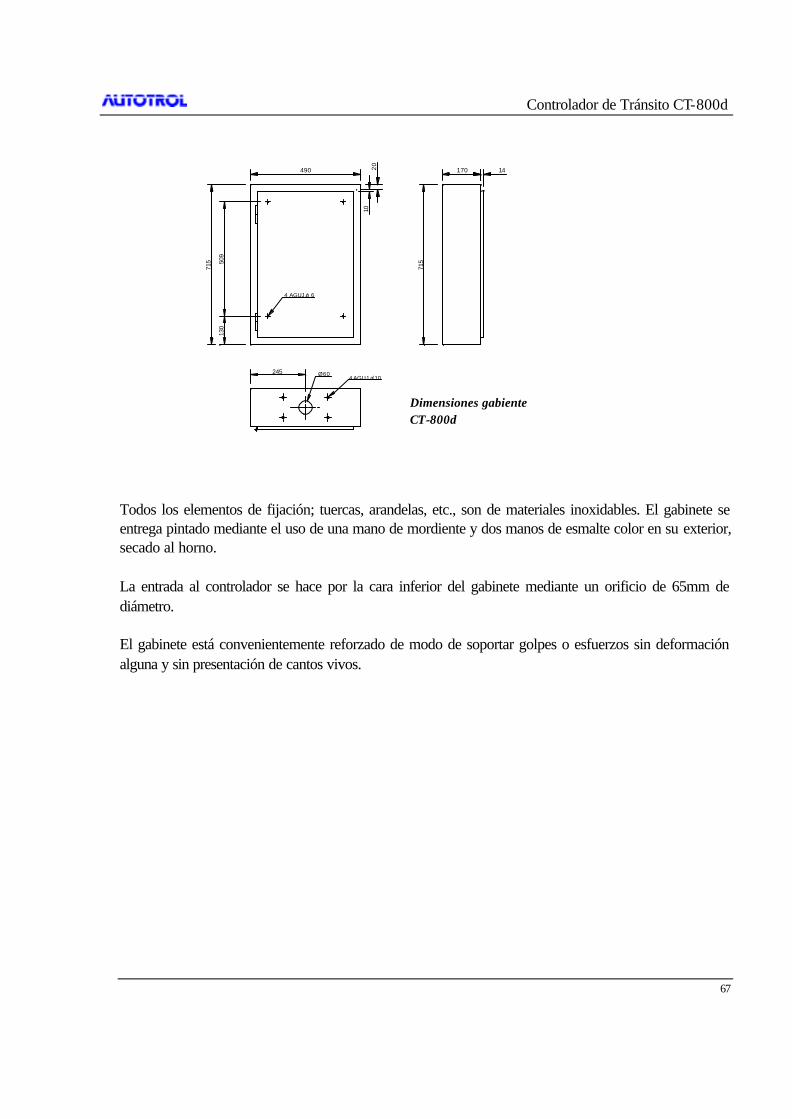
Controlador de Tránsito CT-800d
67
715 50
9
490
130
20
10
715
170
245
14
4 AGUJ.o 6/
Ø604 AGUJ.o 10/
Todos los elementos de fijación; tuercas, arandelas, etc., son de materiales inoxidables. El gabinete se entrega pintado mediante el uso de una mano de mordiente y dos manos de esmalte color en su exterior, secado al horno. La entrada al controlador se hace por la cara inferior del gabinete mediante un orificio de 65mm de diámetro. El gabinete está convenientemente reforzado de modo de soportar golpes o esfuerzos sin deformación alguna y sin presentación de cantos vivos.
Dimensiones gabiente CT-800d
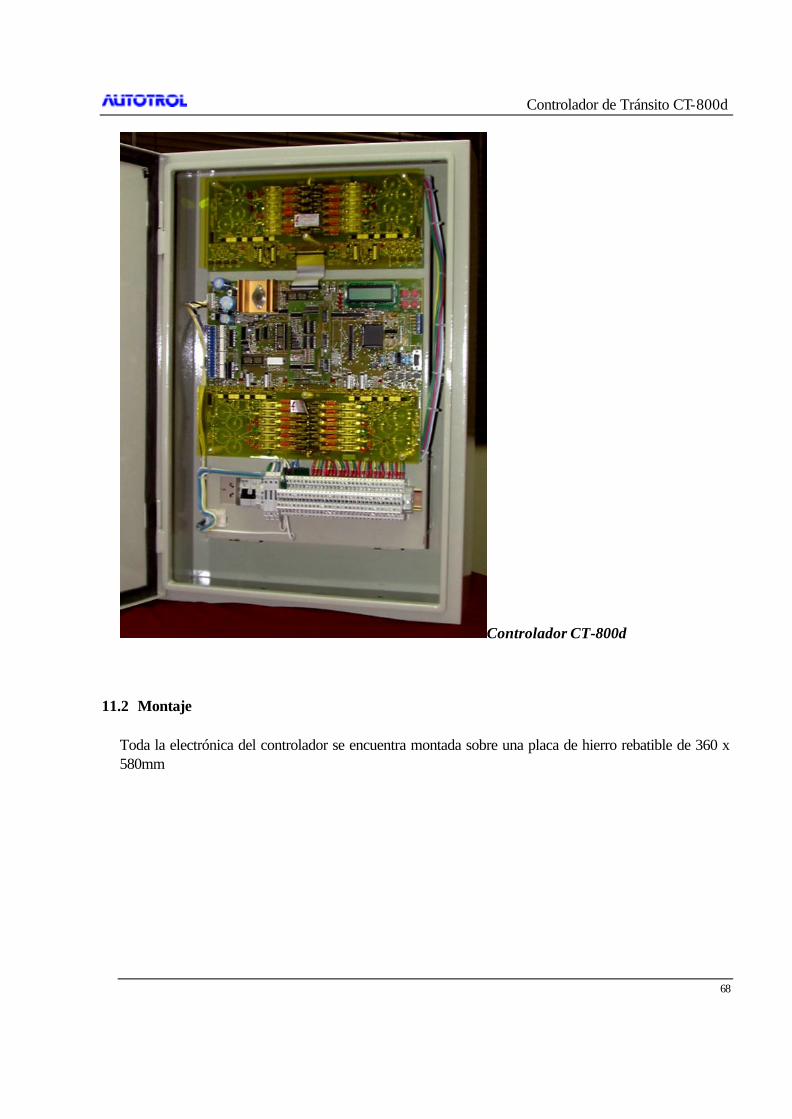
Controlador de Tránsito CT-800d
68
Controlador CT-800d
11.2 Montaje Toda la electrónica del controlador se encuentra montada sobre una placa de hierro rebatible de 360 x 580mm
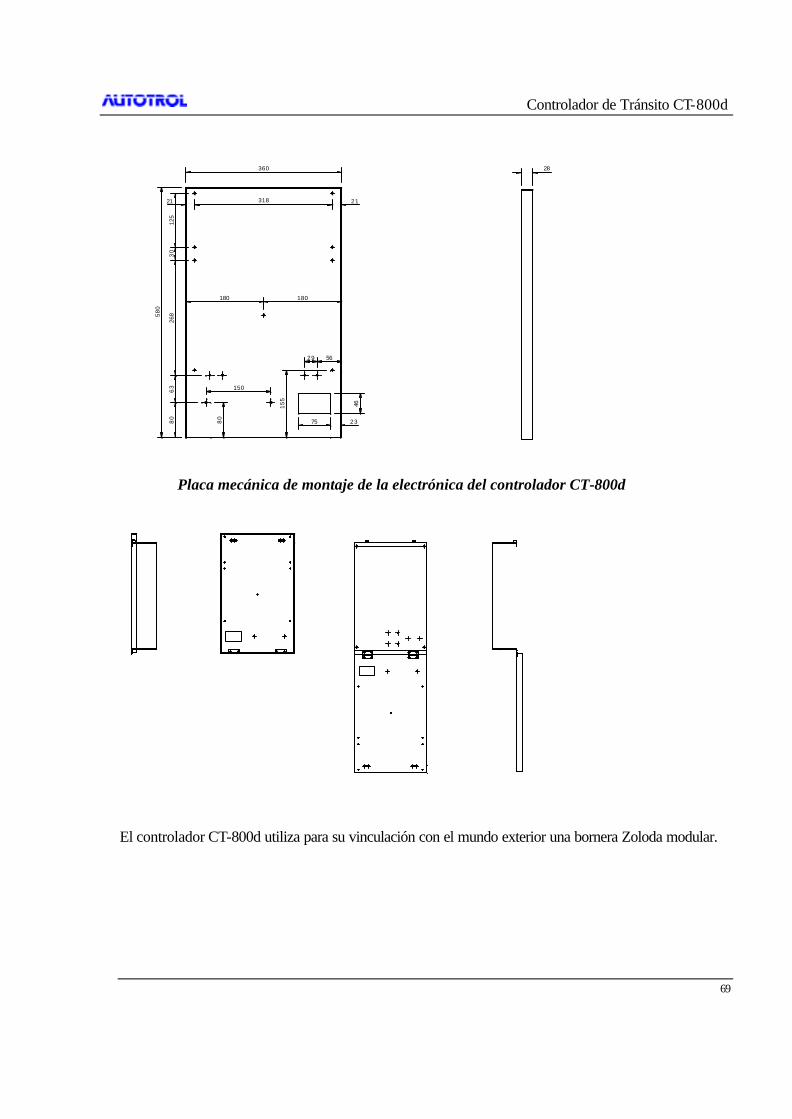
Controlador de Tránsito CT-800d
69
21
150
80
80
63
15
5
75
29 56
58
0
268
180
30
125
180
318
360
23
46
21
28
El controlador CT-800d utiliza para su vinculación con el mundo exterior una bornera Zoloda modular.
Placa mecánica de montaje de la electrónica del controlador CT-800d
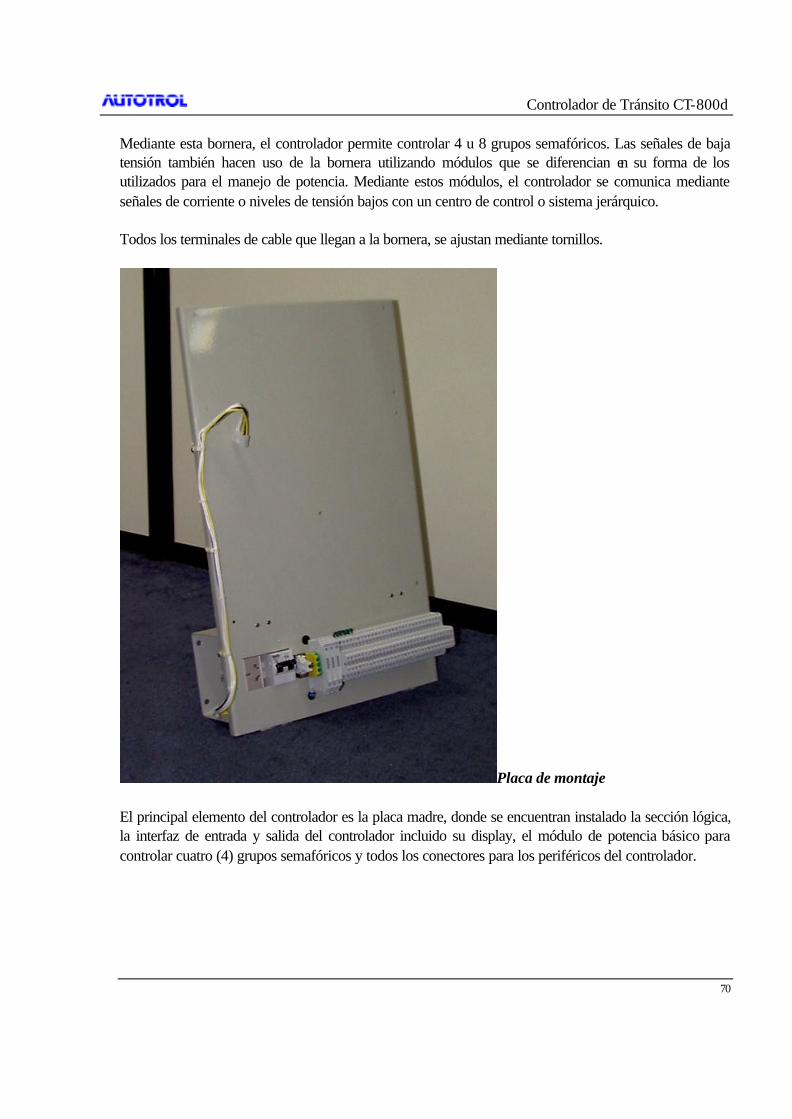
Controlador de Tránsito CT-800d
70
Mediante esta bornera, el controlador permite controlar 4 u 8 grupos semafóricos. Las señales de baja tensión también hacen uso de la bornera utilizando módulos que se diferencian en su forma de los utilizados para el manejo de potencia. Mediante estos módulos, el controlador se comunica mediante señales de corriente o niveles de tensión bajos con un centro de control o sistema jerárquico. Todos los terminales de cable que llegan a la bornera, se ajustan mediante tornillos.
Placa de montaje El principal elemento del controlador es la placa madre, donde se encuentran instalado la sección lógica, la interfaz de entrada y salida del controlador incluido su display, el módulo de potencia básico para controlar cuatro (4) grupos semafóricos y todos los conectores para los periféricos del controlador.
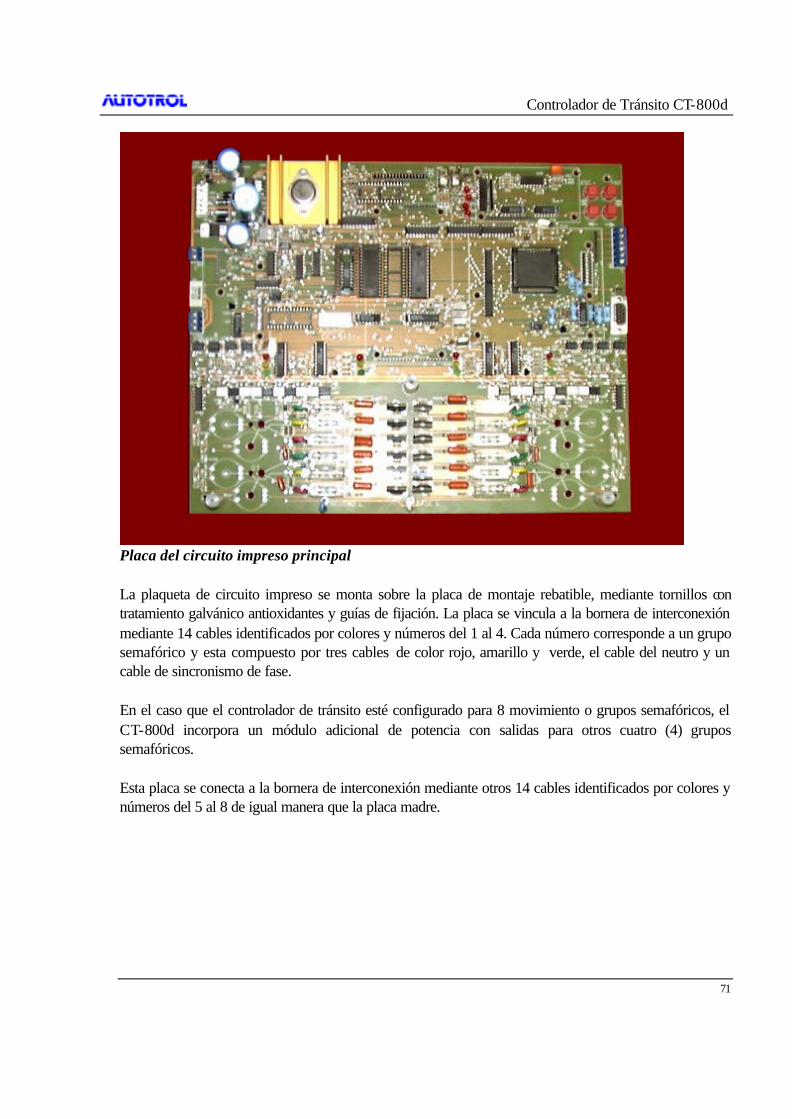
Controlador de Tránsito CT-800d
71
Placa del circuito impreso principal La plaqueta de circuito impreso se monta sobre la placa de montaje rebatible, mediante tornillos con tratamiento galvánico antioxidantes y guías de fijación. La placa se vincula a la bornera de interconexión mediante 14 cables identificados por colores y números del 1 al 4. Cada número corresponde a un grupo semafórico y esta compuesto por tres cables de color rojo, amarillo y verde, el cable del neutro y un cable de sincronismo de fase. En el caso que el controlador de tránsito esté configurado para 8 movimiento o grupos semafóricos, el CT-800d incorpora un módulo adicional de potencia con salidas para otros cuatro (4) grupos semafóricos. Esta placa se conecta a la bornera de interconexión mediante otros 14 cables identificados por colores y números del 5 al 8 de igual manera que la placa madre.
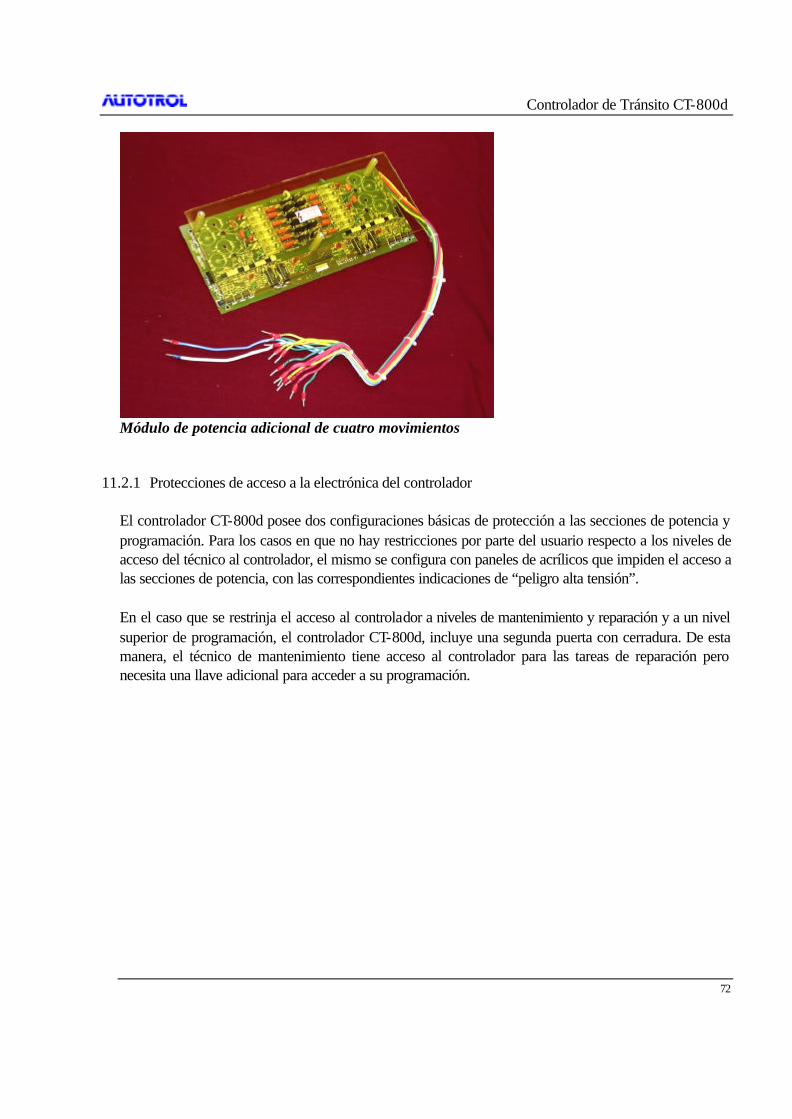
Controlador de Tránsito CT-800d
72
Módulo de potencia adicional de cuatro movimientos
11.2.1 Protecciones de acceso a la electrónica del controlador El controlador CT-800d posee dos configuraciones básicas de protección a las secciones de potencia y programación. Para los casos en que no hay restricciones por parte del usuario respecto a los niveles de acceso del técnico al controlador, el mismo se configura con paneles de acrílicos que impiden el acceso a las secciones de potencia, con las correspondientes indicaciones de “peligro alta tensión”. En el caso que se restrinja el acceso al controlador a niveles de mantenimiento y reparación y a un nivel superior de programación, el controlador CT-800d, incluye una segunda puerta con cerradura. De esta manera, el técnico de mantenimiento tiene acceso al controlador para las tareas de reparación pero necesita una llave adicional para acceder a su programación.
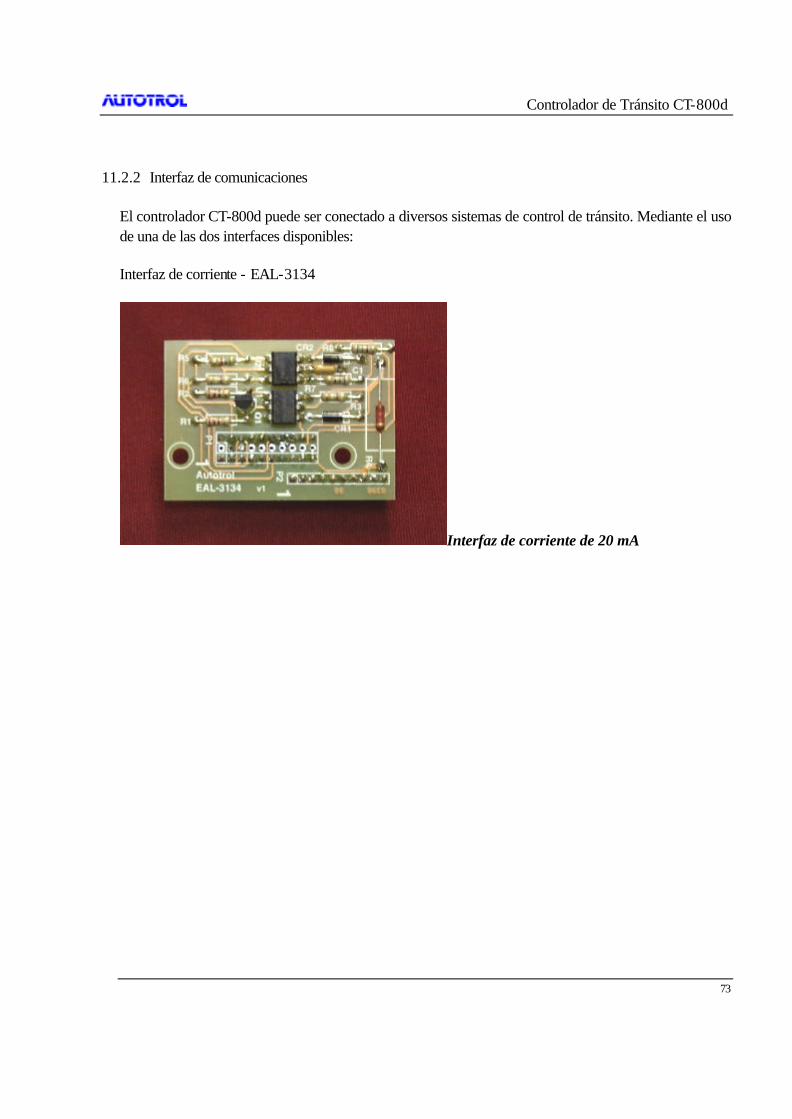
Controlador de Tránsito CT-800d
73
11.2.2 Interfaz de comunicaciones El controlador CT-800d puede ser conectado a diversos sistemas de control de tránsito. Mediante el uso de una de las dos interfaces disponibles: Interfaz de corriente - EAL-3134
Interfaz de corriente de 20 mA
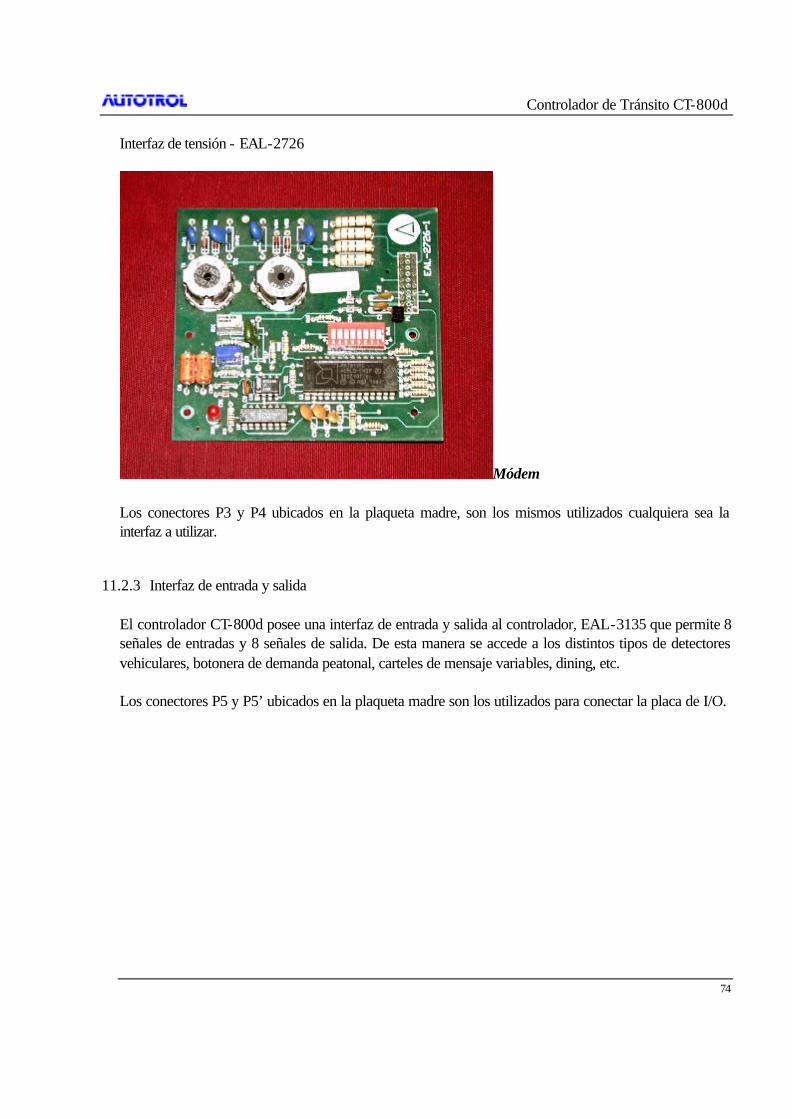
Controlador de Tránsito CT-800d
74
Interfaz de tensión - EAL-2726
Módem Los conectores P3 y P4 ubicados en la plaqueta madre, son los mismos utilizados cualquiera sea la interfaz a utilizar.
11.2.3 Interfaz de entrada y salida El controlador CT-800d posee una interfaz de entrada y salida al controlador, EAL-3135 que permite 8 señales de entradas y 8 señales de salida. De esta manera se accede a los distintos tipos de detectores vehiculares, botonera de demanda peatonal, carteles de mensaje variables, dining, etc. Los conectores P5 y P5’ ubicados en la plaqueta madre son los utilizados para conectar la placa de I/O.

Controlador de Tránsito CT-800d
75
Plaqueta de entrada y salida
11.2.4 Matriz de conflicto El controlador CT-800d posee detección de conflictos de verde y de rojo, mediante configuración de software, hardware o ambas condiciones en forma simultánea. Para el caso de utilizar cualquiera de las dos últimas alternativas, debe ser incorporada una placa de circuito impreso, que mediante el uso de jumper, permita configurar la matriz. La placa de conflicto EAL 3132 se conecta a la placa madre mediante los conectores P7, P8 y P9.
Matriz de conflicto
Controlador de Tránsito CT-800d
76
11.2.5 Detectores de tránsito Para la detección de tránsito, el controlador CT-800d utiliza detectores de la firma Peek - Sarasota de Inglaterra. A tal efecto, el controlador puede ser configurado con detectores de dos (2) y cuatro (4) canales de la serie MTS-382.

Controlador de Tránsito CT-800d
77
El controlador soporta 8 detectores y el montaje se hace en la parte posterior de la placa de hierro rebatible.
Detector de cuatro canales De esta manera es posible montar módulos hasta configurar 8 canales. Los detectores Peek - Sarasota cumplen con los requerimientos de la norma MCE0100-E. El conector utilizado tiene norma DIM 41612.
Controlador de Tránsito CT-800d
78
12. INSTALACIÓN El controlador CT-800D está preparado para ser instalado sobre un buzón o a través de un soporte, sobre una columna. Tiene previstos cuatro agujeros de fijación en su base para su sujeción. Los cables de alimentación, salida a semáforos, comunicación, detectores, etc., acometen por un agujero de 60 mm de diámetro practicado en el centro de su base. Todas las conexiones con el equipo se realizan a través de borneras a tornillo que se encuentran dispuestas sobre un riel en la parte inferior del mismo. Estas borneras son doble piso. En la parte inferior se encuentran las salidas a lámparas de los semáforos, es decir, la parte de potencia. La parte superior está destinada a comunicaciones, entrada detectores, etc., o sea la parte de señales. La conexión de 220 Vca se realiza en dos borneras con fusible incorporado (10A). Es importante respetar los bornes marcados como fase (F) y neutro (N), para dotar a la instalación de mayor seguridad. También es muy importante conectar un cable de tierra en el borne dedicado a tal efecto, el que a su vez deberá conectarse a la jabalina de la instalación. El tercer borne fusible corresponde al fusible de lógica (0,5A) el cual no se debe conectar. A la derecha de los bornes fusible se encuentran los bornes que alimentan a la o las plaquetas (CT-800D/4 o CT-800D/8). A continuación se encuentran los comunes de lámparas y a partir de allí se hallan las salidas a lámparas agrupadas por grupo de señal (1 a 4 ó 1 a 8). Una vez fijado el equipo se recomienda seguir los siguientes pasos: ∗ Comprobar el buen funcionamiento de los semáforos alimentando con 220 Vca grupo por grupo,
verificando el correcto encendido de lámparas y la ausencia de cortocircuitos. ∗ Luego conectar a las borneras correspondientes. ∗ Colocar la llave de lámparas en lámparas apagadas. ∗ Energizar el controlador y observar que éste funciona correctamente a través de los leds
indicadores. ∗ Colocar el equipo en titilante a través de la llave correspondiente. ∗ Encender las lámparas. ∗ Pasar el equipo a operación normal.
Controlador de Tránsito CT-800d
79
Luego de verificar durante algunos ciclos el funcionamiento normal de la intersección: ∗ Conectar y verificar el cableado de la interconexión con el equipo de comando si lo hubiera. ∗ Verificar el correcto funcionamiento del controlador subordinado al equipo de comando con las
lámparas apagadas. ∗ Encender las lámparas y verificar el correcto funcionamiento del equipo. Nota: Al pasar la llave de lámparas a encendido el controlador hará la secuencia de arranque inicial
titilante, inicial todo rojo y luego iniciará el ciclo normalmente.
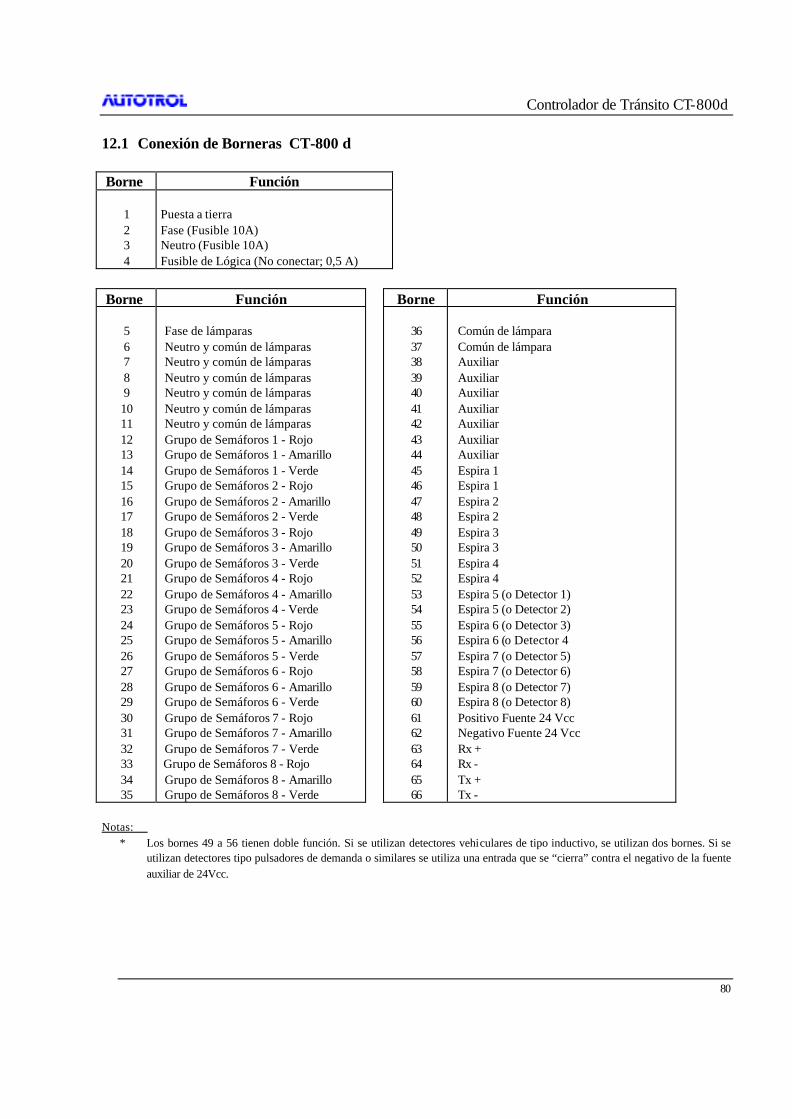
Controlador de Tránsito CT-800d
80
12.1 Conexión de Borneras CT-800 d
Borne Función 1 2 3 4
Puesta a tierra Fase (Fusible 10A) Neutro (Fusible 10A) Fusible de Lógica (No conectar; 0,5 A)
Borne Función Borne Función
5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35
Fase de lámparas Neutro y común de lámparas Neutro y común de lámparas Neutro y común de lámparas Neutro y común de lámparas Neutro y común de lámparas Neutro y común de lámparas Grupo de Semáforos 1 - Rojo Grupo de Semáforos 1 - Amarillo Grupo de Semáforos 1 - Verde Grupo de Semáforos 2 - Rojo Grupo de Semáforos 2 - Amarillo Grupo de Semáforos 2 - Verde Grupo de Semáforos 3 - Rojo Grupo de Semáforos 3 - Amarillo Grupo de Semáforos 3 - Verde Grupo de Semáforos 4 - Rojo Grupo de Semáforos 4 - Amarillo Grupo de Semáforos 4 - Verde Grupo de Semáforos 5 - Rojo Grupo de Semáforos 5 - Amarillo Grupo de Semáforos 5 - Verde Grupo de Semáforos 6 - Rojo Grupo de Semáforos 6 - Amarillo Grupo de Semáforos 6 - Verde Grupo de Semáforos 7 - Rojo Grupo de Semáforos 7 - Amarillo Grupo de Semáforos 7 - Verde
Grupo de Semáforos 8 - Rojo Grupo de Semáforos 8 - Amarillo Grupo de Semáforos 8 - Verde
36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66
Común de lámpara Común de lámpara Auxiliar Auxiliar Auxiliar Auxiliar Auxiliar Auxiliar Auxiliar Espira 1 Espira 1 Espira 2 Espira 2 Espira 3 Espira 3 Espira 4 Espira 4 Espira 5 (o Detector 1) Espira 5 (o Detector 2) Espira 6 (o Detector 3) Espira 6 (o Detector 4 Espira 7 (o Detector 5) Espira 7 (o Detector 6) Espira 8 (o Detector 7) Espira 8 (o Detector 8) Positivo Fuente 24 Vcc Negativo Fuente 24 Vcc Rx + Rx - Tx + Tx -
Notas:
∗ Los bornes 49 a 56 tienen doble función. Si se utilizan detectores vehiculares de tipo inductivo, se utilizan dos bornes. Si se utilizan detectores tipo pulsadores de demanda o similares se utiliza una entrada que se “cierra” contra el negativo de la fuente auxiliar de 24Vcc.

Controlador de Tránsito CT-800d
81
∗ Los bornes 59, 60, 61, 62 son de comunicaciones. Se han identificado para el caso de lazos de 20mA. En el caso de comunicaciones vía módem los bornes marcados como Rx y Tx no poseen polaridad.
Controlador de Tránsito CT-800d
82
13. ESPECIFICACIONES DEL CONTROLADOR CT-800D Tecnología Totalmente electrónica HCMOS, digital, de ultra bajo consumo Microprocesador central de 16 bits Hasta 1Mb de memoria. RAM con batería y FLASH de parámetros Reloj de tiempo real Microcontroladores independientes de 8 bits para cada grupo de señal Bus interno de 25MHz Red de comunicación interna de alta velocidad Watch Dog Timer Sensado analógico de corriente para cada salida de grupo de señal (opcional) Sensado analógico de la tensión de alimentación Monitoreo de la potencia de salida de lámparas (opcional) Controles e indicaciones Teclado y display alfanumérico de cuarzo líquido Llave de operación normal o amarillo intermitente Llave de apagado de lámparas Indicadores luminosos de estado sólido (leds), que muestran el estado de funcionamiento propio y de las comunicaciones Interfase RS-232A para interconexión a una PC o módem telefónico Llave termomagnética bipolar de encendido Tomacorriente Fusibles de alimentación en bornera Fusible de lógica Grupos de señal 4 u 8 grupos de semáforos Indicación constante del estado de los grupos de señal

Controlador de Tránsito CT-800d
83
Modos de funcionamiento Aislado a tiempos fijos Aislado semi-actuado Aislado actuado Coordinado a tiempos fijos Coordinado en tiempo real Tabla horaria Manual Amarillo intermitente, apagado y emergencia por programa Amarillo intermitente o cualquier otro patrón de seguridad por conflicto A todos estos modos de funcionamiento se les puede agregar la capacidad de aforo (opcional) Modos de coordinación Coordinación por equipamiento maestro y/o desde un centro de control Integración de una red de controladores de similar tecnología coordinados entre sí. Posibilidad de inserción en una red de controladores electromecánicos Sincronismo por reloj de tiempo real Sincronismo por frecuencia de red Sincronismo por Sistema de Posicionamiento Global Satelital (GPS) Compatibilidad total con protocolo SCOOT para control en tiempo real Red de comunicaciones Módem norma Bell 202T o CCITT V.23 Lazo de corriente optoaislado Interfaz RS-485 optoaislada Interfaz con fibra óptica Conmutación de lámparas Módulos de potencia de 4 grupos de señal con protección para cada salida de lámpara Semiconductores controlados (TRIACs) Potencia de salida por grupo de señal 1000W Aislación galvánica de 5kV
Controlador de Tránsito CT-800d
84
Seguridades Detección por hardware y software seleccionable para todos los posibles pares de verdes conflictivos Detección por hardware y software de ausencia de rojos tanto para lámpara incandecente de tungsteno, lámpara halógena o leds Detección de una lámpara quemada (opcional) por sensado analógico-digital de corriente Llave termomagnética de encendido Filtro de línea Protección contra interferencia electromagnética y descargas atmosféricas Entradas 8 entradas optoaisladas de detectores o demandas peatonales Salidas 8 salidas optoaisladas programables por el usuario Tensión de alimentación 110/220 Vca -25% a +15% 50/60 Hz Temperatura de operación -20ºC a +70ºC Humedad relativa 0 a 98% Dimensiones Alto: 710mm Ancho: 500mm Profundidad: 200mm Peso 25,4 kg





























