Embed Size (px)
DESCRIPTION
pid
Citation preview

INSTRUMENTACION Y AUTOMATIZACION
INDUSTRIAL
UNDAD V: CONTROLADORES PID
MODULO: CONTROL AUTOMATICO DE EQUIPOS Y DE PROCESOS
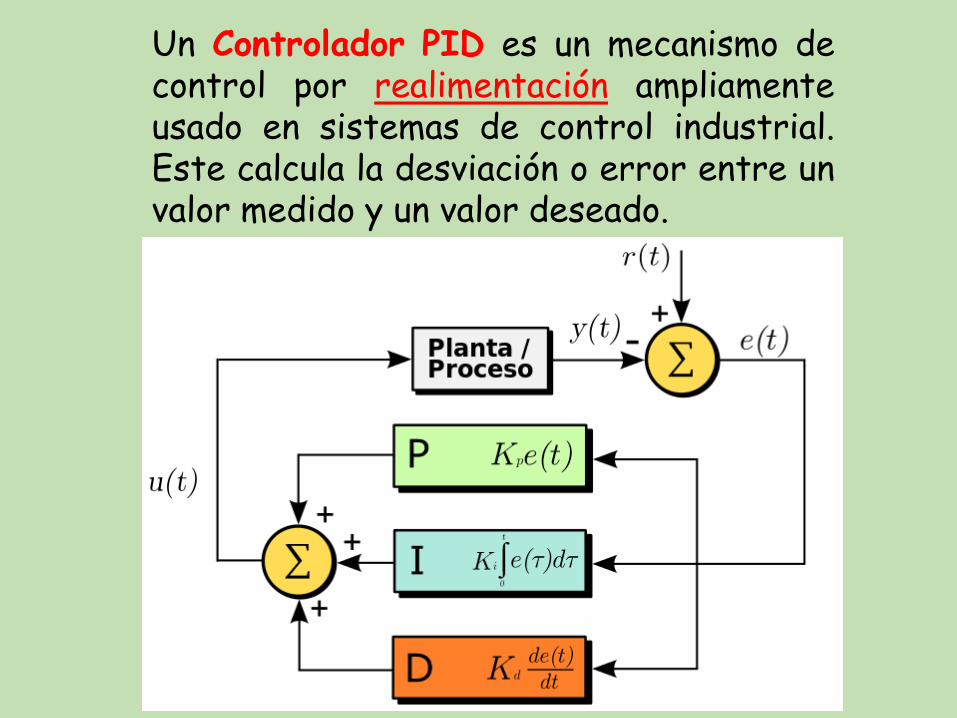
Un Controlador PID es un mecanismo decontrol por realimentación ampliamenteusado en sistemas de control industrial.Este calcula la desviación o error entre unvalor medido y un valor deseado.

Controlador o Regulador PID
El algoritmo del control PID consiste de tresparámetros distintos: el proporcional, el integral,y el derivativo. El valor Proporcional depende delerror actual. El Integral depende de los errorespasados y el Derivativo es una predicción de loserrores futuros. La suma de estas tres accioneses usada para ajustar al proceso por medio de unelemento de control como la posición de unaválvula de control o la potencia suministrada a uncalentador.

Cuando no se tiene conocimiento delproceso, históricamente se ha consideradoque el controlador PID es el controladormás adecuado.Existen controladores PID hidráulicos,neumáticos y electrónicos. También sediseñaron sistemas de control quecontenían controladores PID.Es interesante señalar que más de la mitadde los controladores industriales que seusan hoy en día utilizan esquemas decontrol PID o PID modificado.

Casi todos los controladores PID seajustan en el sitio, siendo que existendiferentes de reglas de sintonización, quepermiten llevar a cabo una sintonizacióndelicada y fina de los controladores PID enel sitio. Asimismo, se han desarrolladométodos automáticos de sintonización yalgunos de los controladores PID poseencapacidad de sintonización automática enlínea.

Actualmente se usan en la industria formasmodificadas del control PID, tales como elcontrol I-PD y el control PID con dos gradosde libertad.
En el control I-PD únicamente se integra elerror y se resta la suma de la parteproporciona y derivativa de la salida.
Para el correcto funcionamiento de uncontrolador PID que regule un proceso osistema se necesita, al menos:1. Un sensor, que determine el estado del
sistema (termómetro, caudalímetro,manómetro, etc).
2. Un controlador, que genere la señal quegobierna al actuador.
3. Un actuador, que modifique al sistemade manera controlada (resistenciaeléctrica, motor, válvula, bomba, etc).
Funcionamiento de un Controlador PID

El sensor proporciona una señal analógica odigital al controlador, la cual representa elpunto actual en el que se encuentra elproceso o sistema.La señal puede representar ese valor entensión eléctrica, intensidad de corrienteeléctrica o frecuencia.En este último caso la señal es de corrientealterna, a diferencia de los dos anteriores,que también pueden ser con corrientecontinua.
Funcionamiento de un Controlador PID
El controlador lee una señal externa querepresenta el valor que se desea alcanzar.Esta señal recibe el nombre de punto dereferencia, la cual es de la mismanaturaleza y tiene el mismo rango devalores que la señal que proporciona elsensor.
Funcionamiento de un Controlador PID

Para hacer posible esta compatibilidad yque, a su vez, la señal pueda ser entendidapor un humano, habrá que establecer algúntipo de interfaz (HMI-Human MachineInterface), son pantallas de gran valorvisual y fácil manejo que se usan para hacermás intuitivo el control de un proceso.
Funcionamiento de un Controlador PID

El controlador resta la señal de punto actuala la señal de punto de referencia, obteniendoasí la señal de error, que determina en cadainstante la diferencia que hay entre el valordeseado (referencia) y el valor medido. Laseñal de error es utilizada por cada uno delos 3 componentes del controlador PID. Las 3señales sumadas, componen la señal de salidaque el controlador va a utilizar para gobernaral actuador.
Funcionamiento de un Controlador PID
La señal resultante de la suma de estastres se llama variable manipulada y no seaplica directamente sobre el actuador, sinoque debe ser transformada para sercompatible con el actuador utilizado.
Funcionamiento de un Controlador PID
Las tres componentes de un controladorPID son: parte Proporcional, acciónIntegral y acción Derivativa. El peso de lainfluencia que cada una de estas partestiene en la suma final, viene dado por laconstante proporcional, el tiempo integral yel tiempo derivativo, respectivamente. Sepretenderá lograr que el bucle de controlcorrija eficazmente y en el mínimo tiempoposible los efectos de las perturbaciones
Funcionamiento de un Controlador PID

CONTROL PROPORCIONAL
En el controlador proporcional, se regula lavariable controlada de manera lineal con laposición del elemento final de control.
“En esencia, un controlador proporcional esun amplificador con una gananciaajustable.”
CONTROL PROPORCIONAL
Para ajustar el controlador proporcional se debe definir:
Ganancia: Es la relación entre la variaciónde la señal de salida y la variación de laseñal de entrada del controlador.
Banda Proporcional: Es la inversa de laganancia, y se define como el porcentajedel campo de medida de la variable que elactuador necesita para efectuar un ciclocompleto.

La parte proporcional consiste en elproducto entre la señal de error y laconstante proporcional para lograr que elerror en estado estacionario se aproxime acero, pero en la mayoría de los casos, estosvalores solo serán óptimos en unadeterminada porción del rango total decontrol, siendo distintos los valoresóptimos para cada porción del rango.La fórmula del Proporcional está dada por
Controlador Proporcional
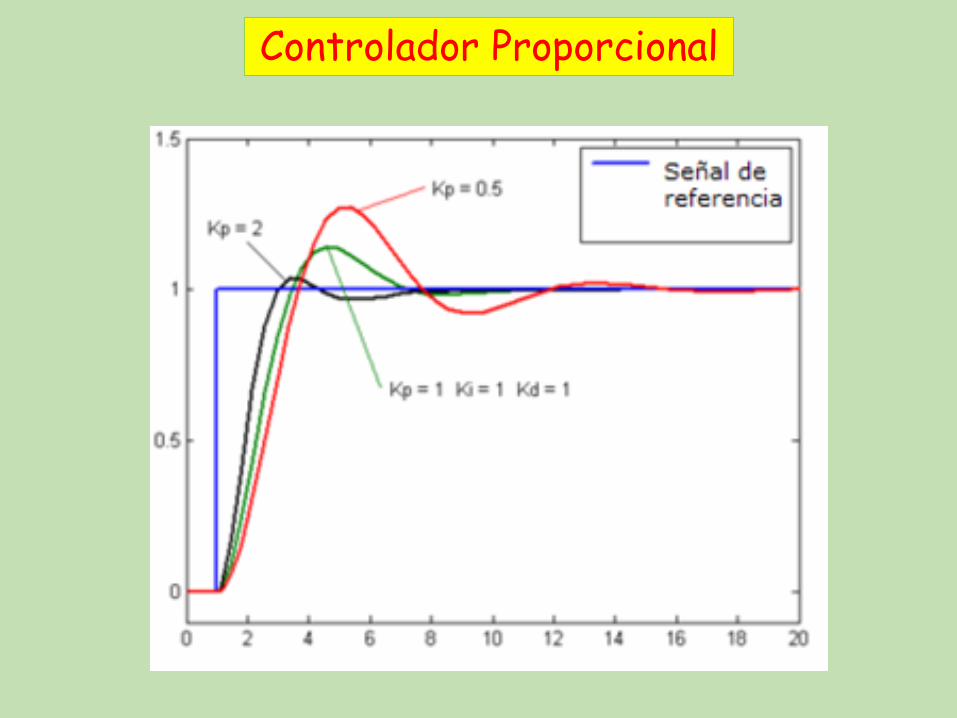
Controlador Proporcional

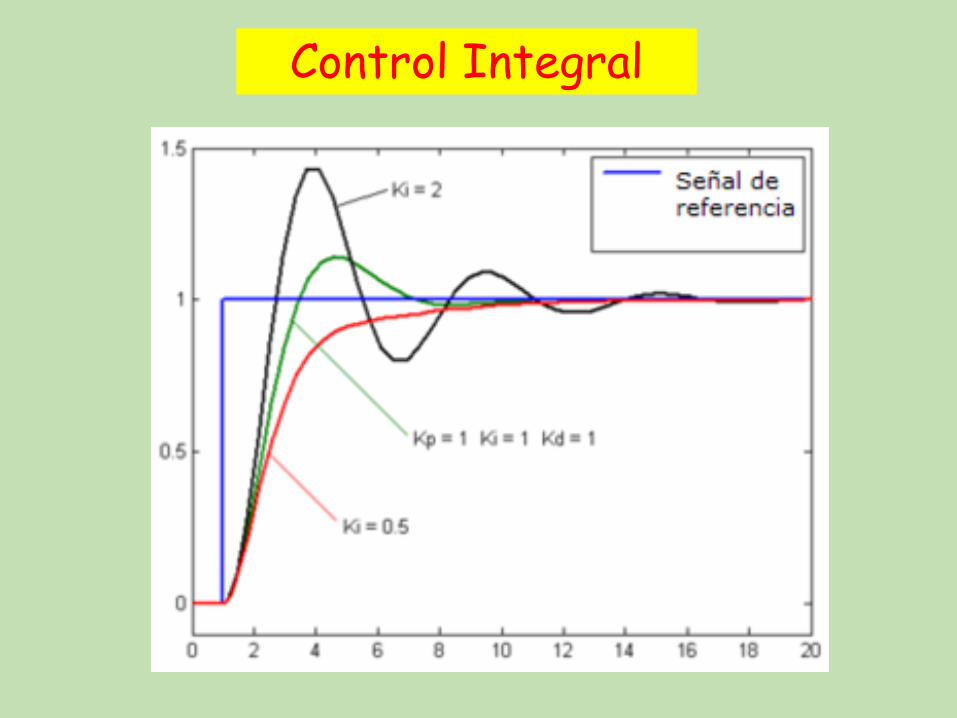
El modo de control Integral tiene comopropósito disminuir y eliminar el error enestado estacionario, provocado por el modoproporcional. El control integral actúa cuandohay una desviación entre la variable y el puntode consigna, integrando esta desviación en eltiempo y sumándola a la acción proporcional. Elerror es integrado, lo cual tiene la función depromediarlo o sumarlo por un períododeterminado; Luego es multiplicado por unaconstante Ki.
Control Integral

Posteriormente, la respuesta integral esadicionada al modo Proporcional paraformar el control P + I con el propósito deobtener una respuesta estable del sistemasin error estacionario.El control integral se utiliza para obviar elinconveniente del offset (desviaciónpermanente de la variable con respecto alpunto dereferencia) de la bandaproporcional.La fórmula del integral está dada por:
Control Integral
Control Integral

La acción derivativa se manifiesta cuandohay un cambio en el valor absoluto delerror; (si el error es constante, solamenteactúan los modos proporcional e integral).El error es la desviación existente entre elpunto de medida y el valor de referencia, o"Set Point".La función de la acción derivativa esmantener el error al mínimo corrigiéndoloproporcionalmente con la misma velocidadque se produce; de esta manera evita queel error se incremente.
Control Derivativo

Se deriva con respecto al tiempo y semultiplica por una constante D y luego sesuma a las señales anteriores (P+I). Esimportante adaptar la respuesta de controla los cambios en el sistema ya que unamayor derivativa corresponde a un cambiomás rápido y el controlador puederesponder acordemente.La fórmula del derivativo está dada por:
Control Derivativo

Kp constante de proporcionalidad: se puedeajustar como el valor de la ganancia delcontrolador o el porcentaje de bandaproporcional.
Ki constante de integración: indica lavelocidad con la que se repite la acciónproporcional.
Significado de las Constantes

Kd constante de derivación: hace presentela respuesta de la acción proporcionalduplicándola, sin esperar a que el error seduplique. El valor indicado por la constantede derivación es el lapso durante el cual semanifestará la acción proporcionalcorrespondiente a 2 veces el error ydespués desaparecerá.
Significado de las Constantes
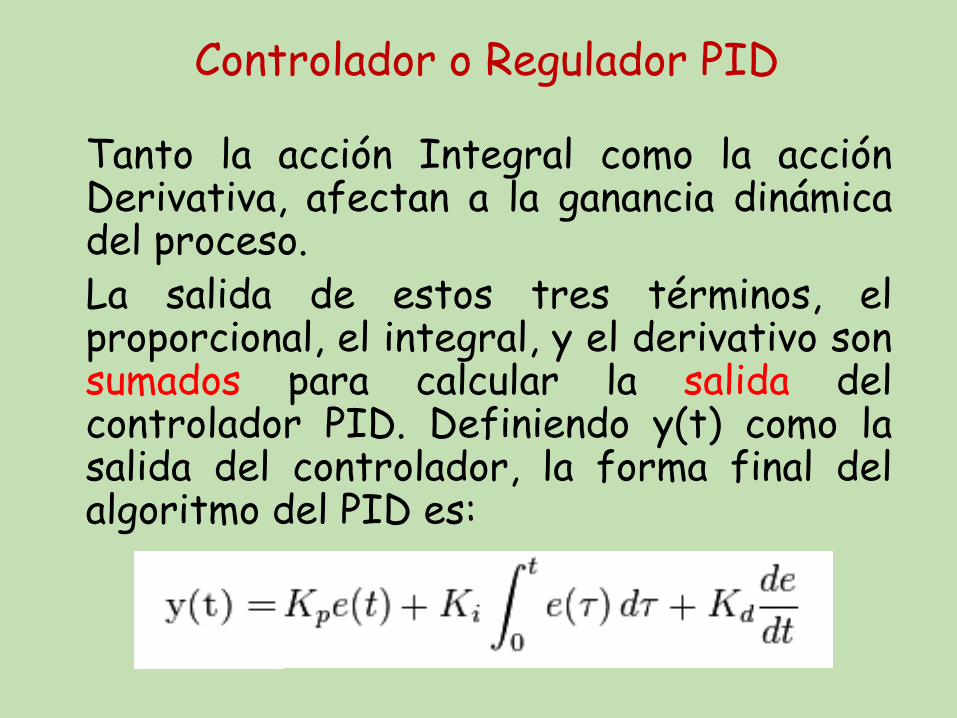
Tanto la acción Integral como la acciónDerivativa, afectan a la ganancia dinámicadel proceso.La salida de estos tres términos, elproporcional, el integral, y el derivativo sonsumados para calcular la salida delcontrolador PID. Definiendo y(t) como lasalida del controlador, la forma final delalgoritmo del PID es:
Controlador o Regulador PID

El objetivo de los ajustes de losparámetros PID es lograr que el bucle decontrol corrija eficazmente y en el mínimotiempo los efectos de las perturbaciones;se tiene que lograr la mínima integral deerror. Si los parámetros del controladorPID (la ganancia del proporcional, integral yderivativo) se eligen incorrectamente, elproceso a controlar puede ser inestable.
Ajuste de parámetros del PID

Ajustar un lazo de control significa ajustarlos parámetros del sistema de control a losvalores óptimos para la respuesta delsistema de control deseada. Elcomportamiento óptimo ante un cambio delproceso o cambio del valor de referencia"setpoint" varía dependiendo de laaplicación.
Ajuste de parámetros del PID

Mientras que los controladores PID sonaplicables a la mayoría de los problemas decontrol, puede ser pobres en otrasaplicaciones. Los controladores PID, cuandose usan solos, pueden dar un desempeñopobre cuando la ganancia del lazo del PIDdebe ser reducida para que no se dispare uoscile sobre el valor del punto dereferencia o "setpoint".
Limitaciones de un control PID

El desempeño del sistema de control puedeser mejorado combinando el lazo cerradode un control PID con un lazo abierto.Conociendo el sistema (como la aceleraciónnecesaria o la inercia) puede ser accionadoy combinado con la salida del PID paraaumentar el desempeño final del sistema.
Limitaciones de un control PID