Embed Size (px)
Citation preview

Exercício analítico sobre PID digital
Guias práticos STR 4-1
4 PID digital (exercícios analíticos)
4.1
Pretende-se controlar em tempo real um dado sistema. Para isso, o sistema foi identificado,
aplicando em malha aberta um degrau unitário na entrada. A sua resposta foi amostrada
obtendo-se a seguinte tabela.
Tempo
(segundos)
resposta ao
degrau unitário
0.0000 0
0.2500 0
0.5000 0
0.7500 0.7869
1.0000 1.2642
1.2500 1.5537
1.5000 1.7293
1.7500 1.8358
2.0000 1.9004
2.2500 1.9396
2.5000 1.9634
2.7500 1.9778
3.0000 1.9865
3.2500 1.9918
A saída após 3.25 segundos a saída manteve-se constante com o valor 2.
a) Determinar o valor do intervalo de amostragem Ts e os parâmetros do controlador PID
discreto (kp, ki e kd), dado pela seguintes equação diferença:
mk = kp ek + ki Sk + kd (ek - ek-1)
onde: Sk = Sk-1 + ek
Nota: Embora normalmente não
apareça no enunciado de um teste os
valores considerados foram:
k = 2
Tp = 0.5
L = 0.5
E a FT 1ª ordem é na forma
G s kesT
Ls
p( ) =
+
−
1

Exercício analítico sobre PID digital
Guias práticos STR 4-2
sendo mk ao sinal de controlo no instante k e ek o erro no instante k.
Utilize para os cálculos a seguinte regra:
kR L T
kT
R L Tk
RTps
is
sd
s=
+=
+=
12 0 62
52
.( )
,.
( / ),
.
e
Ts = 0.3 L
Onde L é o tempo morto (dead time) e R o declive da curva de saída.
b) Escreva um programa que implemente o controlador PID na forma dada na alínea
anterior. Assuma que dispõe das seguintes funções ou procedimentos:
GetTime retorna o valor do relógio de tempo real em décimos de segundo
Out (m) aplica o valor num dado instante k do sinal m a uma DAC
In (e) lê o valor de e de uma ADC num dado instante k
Nota: caso não tenha conseguido resolver o anterior, assume valores razoáveis para Ts, Kp,
Ki e Kd.
c) Escreva outro programa, utilizando agora um algoritmo de velocidade para o PID. Assuma
que o controlo é iniciado quando o sistema está em repouso.

Exercício analítico sobre PID digital
Guias práticos STR 4-3
Resolução
a)
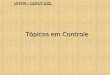
Assumindo que podemos identificar um sistema de 1ª ordem com atraso de acordo com:
e como a resposta é:
Por observação do gráfico o atraso L = 0.5 seg.
∆ gain = K =
TT = L + Tp
t
y(∞)
y(∞) Slope R
Tp
Tt

Exercício analítico sobre PID digital
Guias práticos STR 4-4
O ganho k é dado por:
2==∆∞
=∆
=12)y(Hk
Pois o degrau de entrada é unitário e a resposta final é 2.
O declive da recta, R, pode ser calculado pela equação da recta que passa por dois pontos.
Pode-se considerar os dois primeiros pontos (t,y) da resposta não nula, como mostra a figura
acima, i.e (0.5,0) e (0.75, 0.7869):
3.1476=−
−=
−−
==5.0
7869.075.05.0
7869.00t-ty-y
R10
10
Agora para calcular o Tt, isto é o Tempo quando a recta de declive R intersecta a resposta
final, resolve-se a equação acima de modo a determinar o tempo para y = 2, i.e o segundo
ponto será (Tt, 2):
tt0
0
T5.0201476.3
T-t)y(-y
R−−
=⇔∞
=
E resolvendo em ordem a Tt tem-se:
1354.1T3.1476-
0.5*1476.3-2T tt =⇔=
Agora pode-se determinar a constante de tempo com:
Tp = Tt – L = 1.1354-0.5 = 0.6354
Substituindo obtém-se a FT seguinte:
1S 0.634e 2
1S Tpek G(S)
S 0.5S L
+=
+=
−−

Exercício analítico sobre PID digital
Guias práticos STR 4-5
E para determinar a sintonia do PID usando as regras dadas no enunciado:
Ts = 0.3 L = 0.3 * 0.5 = 0.15
( )
( )
( )
( )
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
==
=+
=
=+
=
⇔
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
=
+=
+=
1.0590
0.0864
0.5864
0.15*3.1476 0.5k
2/0.150.5 *3.1476 0.15* 6.0k
0.150.5*3.14761.2k
RT0.5k
2/TL RT 6.0
k
TL R1.2k
d
2i
p
sd
2s
si
sp
b)
O algoritmo de controlo do PID discreto, usando as expressões acima indicadas para o
cálculo do sinal de controlo, e as funções para a entrada de dados com a Plant e para
sincronizar com o tempo de amostragem de 0.15 segundos, em, por exemplo PASCAL:
PROGRAM PID_discreto_base;
VAR
Ts, time, NextSample, S, m, e, eold, kp, ki, kd : REAL;
BEGIN
kp := 0.586;
ki := 0.086;
kd := 1.059;
In (eold); (* Melhor inicializar eold com o valor corrente do que com 0 *)
S : = 0;
Ts = 0.15;
time := GetTime*0.1; (*Converte para segundos*)
WHILE TRUE DO
BEGIN
(* Aguarda próximo instante de amostragem *)
NextSample := time + Ts;
WHILE time < NextSample DO time := GetTime*0.1;

Exercício analítico sobre PID digital
Guias práticos STR 4-6
(* Aquisição do, sinal de entrada do controlador via ADC*)
In (e);
(* Tarefa de Controlo *)
S := S + e;
m := kp * e + ki * S + kd * (e - eold);
eold := e;
(* Envia sinal de controlo para Plant via DAC*)
Out (m);
END;
END.
c)
O algoritmo de velocidade é dado por:
∆mk = mk - mk-1
Aplicando na equação do PID discreto usada na alínea anterior:
( )1-kkdkikpk eekSkekm −++=
( )2-k1-kd1-ki1-kp1-k eekSkekm −++=
têm-se:
( )2-k1-kkd1-kki1-kkpk e2e-ek)S-(Sk)e-(ekm +++=∆
e como:
ek = Sk - Sk-1
chega-se a:
d2-kdp1-kdipkk ke)k2k(e-)kk(kem ++++=∆
De modo que o programa anterior deve ser alterado segundo:

Exercício analítico sobre PID digital
Guias práticos STR 4-7
PROGRAM PID_discreto_algo_velocidade;
VAR
Ts, time, NextSample, dm, e, e1, e2, kp, ki, kd, K : REAL;
BEGIN
kp := 0.586;
ki := 0.086;
kd := 1.059;
e1 := 0; (* Visto que o controlo é iniciado com o sistema em repouso *)
e2 := 0;
Ts = 0.15;
time := GetTime*0.1; (*Converte para segundos*)
While TRUE
(* Aguarda próximo instante de amostragem *)
NextSample := time + Ts;
WHILE time < NextSample DO time := GetTime*0.1;
(* Aquisição do, sinal de entrada do controlador via ADC*)
In (e);
(* Tarefa de Controlo *)
dm = e*(kp + ki + kd) - e1 * (kp + 2 *kd) + e2 * (kd);
e2 = e1;
e1 = e;
(* Envia sinal de controlo para Plant via DAC*)
Out (dm);
END;
END.