Embed Size (px)
Citation preview

Modelling coral’s interactions with other species on a coral reef.
Talya Mellor: 1336294
1 Introduction
Coral reefs are deteriorating at an alarming rate with 70% of coral reefs now classed as threatened[1]. It is possible that mathematical models could aid reef Managers in their effort to protect thesehabitats. Sometimes known as rainforests of the sea, coral reefs cover less than 1% of the ocean floor[2]. Despite this small percentage they are thought to accommodate between 1 and 9 million differentspecies [3] making them some of the most biologically diverse habitats on earth. Alongside the threatto biodiversity, reef decline has significant implications for local communities that rely on them forfood, income and coastal defences. A variety of factors are known to cause reef decline. These include:
• Overfishing of reef grazers allowing algae to overgrow the reefs.[2]
• Increase’s in extreme weather, such as hurricanes which can cause lasting structural damage tothe reef.
• The breakdown of corals relationship with the algae leaving it unable to gain the nutrients itneeds.The most widely researched cause being increases in sea temperature. [4].
• Increases in the sea’s uptake of C02 decreases the seas pH. This can cause the dissolution ofcalcium carbonate which is the primary building block of coral reefs [2] [4].
Coral reefs are made up of hard and soft corals, sponges and algae [3]. Hard corals are knownas reef builders. They are responsible for developing the multicoloured limestone structures thatcategorise a coral reef. Soft transparent coral polyps utilise calcium carbonate in seawater to create ahard limestone exoskeleton to protect their bodies[3] . When the polyps die they decompose leavingthis limestone rock behind for new polyps to build on [2]. Thus only the outer layer of coral is alive[5]. Corals attribute their bright colours to an algae named zooxanthella which live inside the polyps’bodies. This algae provides the coral with nutrients and in return the coral offers the algae protection[2].
Overfishing is of particular interest as it is directly caused by human behaviour. As in any ecosys-tem coral competes with other species on the reef for space, nutrition and light. One of these com-petitors is an algae known as macroalgae. It is usually kept at bay by species of fish that graze thereef. Grazed macroalgae can provide a good environment for new coral polyps to develop. Howeveroverfishing of grazing fish can allow the macroalgae to overgrow the reef causing coral death [6].
In this project we look to understand how system’s of ordinary differential equations have beendeveloped to model this relationship between grazers, corals, and macroalgae. For the most part thisproject is based around a model described by Mumbey et al. in [9]. We look to understand howthe model is established and consider how analytical methods can be used to gain an understandingof the behaviour of the system. The later sections of this project go on to consider the work donein subsequent papers analysing and extending the model. We then go on to introduce the basicconcepts of delay differential equations and consider how scientists have used them to analyse whethera change in fishing strategy can increase reef resilience to alternative stresses, such as a naturaldisaster. Throughout this analysis we are particularly interested in whether shifts in reef conditionsare reversible [7].
1

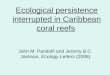
Figure 1: Left: A healthy coral reef [2]. Right: A coral reef overrun with macroalgae [8].
2 Modelling corals relationship with macroalgae
The model created by Mumby et al. considers the interactions between coral and algae on coral reefsin the Caribbean. Caribbean reefs are of particular interest because they are seen as less resilientthan other reefs due to their low species diversity. The model considers the interactions between threedifferent groups; coral, algal turf and macroalgae. Algal turf is a thin layer of algae that remains onthe reef after macroalgae has been grazed. It provides good conditions for coral growth but if left un-grazed will grow back into macroalgae. We begin by defining important parameters and assumptions.For simplicity the reef is modelled as a reasonably flat structure enclosed in a limited area of seabed.Thus the area covered by coral, algal turf, or macroalgae, is perceived as if from a birds eye viewand taken as a fraction of the available space. The parameters defined below are kept consistentthroughout this project:
• C: Coral cover: The of area covered by coral as a fraction of the available seabed.
• T: Algal turf cover: The area of seabed covered by a algal turf given as a fraction of the availableseabed.
• M: Macroalgae: The area of macroalgae cover as a fraction of the available seabed.
• r: The rate that corals colonise algal turfs.
• d: The natural mortality rate of corals.
• a: The rate that macroalgae overgrows corals.
• q: The rate that macroalgae spreads over algal turfs.
• g: The grazing rate of fish.
Here the lower-case parameters are treated as constants which can be estimated from historicaldata, whilst the parameters in capitals are variable’s. It is important to note that in this modelgrazing (g) is taken as a constant. In reality this is unlikly to be the case as grazing is dependent onthe population of fish. We assume a triangular relationship between coral, macroalgae, and algal turfas seen in Figure 3. Thus, algal turf grows over dead coral and coral grows over algal turf. Macroalgaegrows over both algal turf and coral whilst grazing reduces it back to algal turf. Algal turf grows overdead coral and is produced via grazing. It is assumed that there is no time delay to take account ofgrowth. This means, for example, that whilst in a real world environment dead coral might remainundisturbed for a period of time, in this model it is immediately colonised by algal turf. The finalassumption is that C+T+M = 1 so that all available space is covered at all times [9]. This assumptionreflects the understanding that an increase in macroalgae leads to a decrease in coral and vice versa.Note, also that due to the assumed triangular relationship this system is dependent on grazing in thismodel graving (g) is taken as a constant.
2

Figure 2: A diagram to show the relationship between coral, macroalgae and algal turf.
Mumby et. al builds up differential equations for the changes in cover of the three variables; M,C, T as follows. The change in macroalgae cover over time dM
dt is given by
dM
dt= aMC︸ ︷︷ ︸
Macroalgae growth over coral
− gM
M + T︸ ︷︷ ︸Macroalgae removed due to grazing
+ qMT.︸ ︷︷ ︸Macroalgae growth over turf
The change in coral cover over time dCdt is given by
dC
dt= rTC︸︷︷︸
Coral growth over turf
− dC︸︷︷︸Coral mortality
− aMC.︸ ︷︷ ︸Macroalge growth over corals
The change in algal turf cover over time dTdt is given by
dT
dt=
gM
M + T︸ ︷︷ ︸Turf added due to grazing
− qMT︸ ︷︷ ︸Macroalgae growth over un-grazed turf
− rTC︸︷︷︸turfs colonized by coral
+ dC.︸︷︷︸Coral mortality
The assumption that no area of seabed is left uncovered means that T = 1− C −M and thus dTdt
can be found in terms of dCdt and dM
dt [6]. Therefore we only require two of the three equations statedabove to describe changes in C, M and T. It makes sense to use the equations for C and M since weare interested the relationship between grazers, corals, and macroalgae. Choosing these two equationsalso reduces the number of terms, simplifying the analysis. Therefore we have the model:
dM
dt= aMC − gM
M + T+ qMT, (1)
dC
dt= rTC − dC − aMC. (2)
3 Analytical methods for Solving this model
Li et al. provides a detailed global analysis of the above ODE model in [6]. In this project we considerthe methodology used to interpret a system of ODE’s of this type. Dynamical Systems are a ‘meansof describing how one state develops into another state over a course of time’ [10]. The System ofordinary differential equations above considers how a reef might shift from a coral dominated stateto a macroalgae dominated state and back again over a course of time. Therefore it can be describedas a Dynamical system. It is clear to see that this system is non-linear, demonstrated by the terms
3

where M, C, and T are multiplied together, and autonomous, because the system does not depend ontime [11].
We wish to eliminate T by substituting T = 1−C −M from above. In order to make the systemmore familiar let M=x and C=y [6]. On rearranging the system becomes:
dx
dt= x
(q − qx+ (a− q)y − g
1− y
), (3)
dy
dt= y(r − d− (a+ r)x− ry). (4)
We begin by noting that there is a singularity at y=1. In order to utilise much of the theory foranalysing non-linear dynamical systems our equations must be analytic at all points. Therefore define:Ω = (x, y) : 0 < x, 0 < y, x + y < 1 as the region of interest [6]. We are interested only in thepositive quadrant because it is not possible to have a negative population size [11].
Our task now is to analyse and understand what this system shows about corals relationship withmacroalgae. Arguably the best way to do this is to find solutions to our problem as flow lines of anassociated vector field V:
V =
(F (x, y)G(x, y)
)=
(x(q − qx+ (a− q)y − g
1−y )
y(r − d− (a+ r)x− ry)
).
We begin by considering the equilibrium points of the system. These are points in the field where thesolution remains unchanged and we have x = 0 and y = 0 [11]. A simple calculation establishes thatthere are three boundary equilibria at (0,0), (0, r−dr ), and ( q−gq ,0) and an additional interior equilibrium
point where 0 = (q − qx + (a − q)y − g1−y ) and 0 = (r − d − (a + r)x − ry) [6]. These two equations
are difficult to solve for x and y. Therefore we will classify the boundary equilibria only and look togain greater incite of the behaviour at this internal equilibria via analysis of the nullclines
It is possible to establish the behaviour of our system in a region surrounding the three boundaryequilibrium points using the method of linearisation.
Theorem 1. For a simple analytic function a taylor series expansion is given by
y = x = f(y + x0) = f(x) +Df(x)y + o(|y|2), where
D =
(Fx(x, y) Fy(x, y)Gx(x, y) Gy(x, y)
)is the Jacobian. When a taylor series expansion of a function exists at all points the linearization ofa system F at x0 is given by L = DF (x0) [11].
Calculating the Jacobian for the system gives:
DV (x, y) =
(q − qx+ (a− q)y − g
1−y − qx x(a− q + −g(1−y)2 )
y(−(a− r)) r − d− (a+ r)x− ry − ry
).
and so
DV (0, 0) =
(q − g 0
0 r − d
)has eigenvalues λ1 = q − g and λ2 = r − d.
DV
(0,r − dr
)=
(a− d
r (a− q)− g rd 0−(r−d)(a+r)
r d− r
)
4

has eigenvalues λ1 = a− dr (a− q)− g rd and λ2 = d− r and finally,
DV
(q − gq
, 0
)=
(g − q (1− g
q )(a− q − g)
0 −(d+ a) + gq (a+ r)
)has eigenvalues λ1 = g − q and λ2 = −(d+ a) + g
q (a+ r).
To determine the behaviour of the flow near each of these equilibrium points we need to determinethe sign of the eigenvalue’s. We could take a case by case approach but this would be time consumingdue to the number of unknown parameters. Fortunately the model is based on a real-world environmentand observational studies can provide insight into what these parameters could be. Using a variety ofdifferent studies, highlighted in [7], it is estimated that a=0.1, q=0.8, r=1, d=0.44 and g is taken tobe variable in the region 0.1 ≤ g < 0.8. This enables us to assume that generally a < d < q < r < 2q[6].
Therefore we have that at V(0,0), both values of λ are greater than 0 and for all values of g.Therefore the eigenvalues are real, different and positive which suggests there is an unstable node forthe linearised system at (0,0).
At V (0, r−dr ), λ2 < 0 at all points because d < r. The sign of λ1 is dependent on the value of g.We know that q > a so a− a rd(a− q) > 0. Now we have two cases:
• Case A: If g is small (i.e g=0.1) then a rd(a− q) > g rd . This implies that λ1 > 0 and λ2 < 0. Theeigenvalues are real and of different sign. This implies a saddle point for the linearised system.
• Case B: If g is large (i.e g=0.4) then a rd(a − q) < g rd so λ1 < 0. Therefore the eigenvalues areboth real, different and negative; λ1 < 0 and λ2 < 0. This implies a stable node in the linearisedsystem.
Finally we classify V ( q−gq , 0). λ1 < 0 because q > g. λ2 on the other hand depends on the valuechosen for g. Therefore, as before, we have two cases:
• Case A: If g is small (i.e g=0.1) then gq (a+ r) < d+ a. This implies that λ2 < 0. Therefore the
eigenvalues are both negative. As above this implies a stable node in the linearised system.
• Case B: If g is large (i.e g=0.4) then gq (a+ r) > d+ a. Therefore λ2 > 0. Thus the eigenvalues
are of different sign which implies there is a saddle point in the linearised system.
From above it is clear that changing the value of g between 0.1 and 0.8 creates two different phaseportraits. Now we turn our focus towards the equilibrium point that satisfies 0 = (q−qx+(a−q)y− g
1−y )and 0 = (r − d − (a + r)x − ry). To classify this point using the above method is challenging as itrequires solving for x and y. Fortunately considerable insight into the behaviour of the system closeto this point is gained through studying the nullclines of the system [6].
Definition 3.1. 0-Isoclines are given by F(x,y)=0 and G(x,y)=0 where F(x,y)=0 gives the x isoclineand G(x,y) gives the y isocline, 0-isocline are also known as nullclines [11].
Using this definition the x nullcline’s are given by x = 0 and
q − qx+ (a− q)y − g
1− y= 0
=⇒ y2(q − a) + y(a− 2q + qx) + q − qx− g = 0
Solving for y gives
=⇒ y =(2q − a− qx) +
√q2x2 + a2 − 2aqx+ 4gq − 4ga
2(q − a)
5

The y nullcline’s are given by y = 0 and
r − d− (a+ r)x− ry = 0
=⇒ y = −(
1 +a
r
)x+
(1− d
r
)These lines can be plotted using a package called P-plane. To do this the values of a, q, r and d
are taken as the estimated values stated above.
Figure 3: The nullclines plotted for different values of g. Left g=0.4, middle g=0.3 and right g=0.1.
Equilibrium points occur when nullclines cross. In the left and right graph the lines only cross atthe boundary’s. Therefore the equilibrium point which satisfies 0 =
(q − qx + (a − q)y − g
1−y)
and0 = (r − d − (a + r)x − ry) does not occur in the region of interest when g=0.4 or larger or wheng=0.1. In the middle graph, however this internal equilibrium point exists where the nullclines cross.Clearly the grazing level of fish completely changes the system.
The red and yellow arrows on the graphs signify the direction of flow. Using the information gainedthrough the classification of the boundary equilibria above and this knowledge of the direction off flowphase lines are added to create a full phase portrait at different values of g in figure 4.
Figure 4: Phase planes of the system plotted for different values of g. Left g=0.4, middle g=0.3 andright g=0.1
The graph for g=0.4 (case B above) has only one stable steady state at x=0 suggesting that allmacroalgae is kept at bay by the grazers. Likewise in the graph for g=0.1 on the right the only steady
6

state is at y=0, indicating the death of all coral. For a grazing rate of 0.3 both macroalgae, and coraldominated states are stable and the outcome is dependent on the initial ratio of coral:macroalgae.Clearly the preferable environment is presented in the graph on the left however this is clearly relianton grazing being high enough to keep macroalgae at bay.
4 Dynamic Grazing
An obvious problem with the model above is that grazing is set as constant. Grazing intensity isdependent on the population size of the grazers. This inevitably fluctuates over time and can bedramatically influenced by fishing intensity and changes in coral and macroalgae populations overtime. We consider how the method used by Blackwood et al. in [7] allows grazing intensity as afunction of parrot fish population g(P) to be introduced into the model. We need to make assumptionsabout the type of fish grazing the reef. The Parrotfish is one of the more common fish found grazingCaribbean coral reefs. Different species of parrotfish exhibit different grazing behaviour. We requirethat the parrotfish graze macroalgae and algal turf evenly. Such behaviour is exhibited by certainspecies in the genus Sparisoma which Blackwood et al. assumes to dominate the community. Tointroduce dynamic grazing into the model we must consider the change in the number of parrotfishover time dP
dt . Blackwood et al. models the growth of this population using the logistic equation.
Definition 4.1. The logistic equation is a continuous model for population growth given by dNdt =
sN(K−N)K1
where s represents the maximum rate of population growth and K is the maximum sustainablepopulation. (carrying capacity) [10].
Rearranging the logistic equation and letting N=P where P is the number of parrotfish in the
population gives dPdt = sP
(1− P
K1
). The maximum sustainable population (K1) is inevitably limited
by habitat conditions. To incorporate this Blackwood et al. introduces a term 0 < K(C) < 1that ‘limits carrying capacity as a function of coral cover’[7]. Therefore if K1 = β is the maximumsustainable population then βK(C) is the maximum sustainable population when limited by coralcover. Finally we represent the parrotfish removed from the system due to fishing by fP where f is theconstant rate of fishing. Subtracting this term from dp
dt and adding this new differential equation tothe system in Section 2 gives:
dM
dt= aMC − g(P )M
M + T+ qMT, (5)
dC
dt= rTC − dC − aMC, (6)
dP
dt= sP
(1− p
βK(C)
)− fP. (7)
In order to define g(P) Blackwood et al. let grazing intensity be proportional to Pβ . Therefore
assuming that α is a positive constant g(P ) = αPβ . Previously the upper limit for g was defined as
0.8. Blackwood et al. extends this to 1 for convenience and lets α = gmax = 1. This results ing(P ) = P
β which means that if the number of parrotfish reaches the maximum sustainable populationthen grazing will be equal to 1. This can only be the case when there is no limitation on the parrotfishpopulation. Fortunately the only way to obtain P = β is to let K(C)=1 and f=0. These valuescorrespond to there being no fishing and no limitation from coral. Therefore our value for g(P) makessense.
Finally we can non-dimensionalise in order to study the ‘dynamics relative to the maximum car-rying capacity β’ [7]. This is done by letting P = P ∗β which becomes dP
dt = P ∗
dt β on differentiating.
7

Substituting this into the equation gives:
dP ∗
dt= sP ∗
(1− p∗
K(C)
)− fp∗ [7].
The introduction of dynamic grazing into the system is a step towards making the model moreconsistent with the real world environment. It allows us to consider the system under different reefconditions. Having already established the importance of grazing Blackwood et al. goes on to considerwhether the introduction of a controlled fishing strategy would increase coral’s resilience to a naturaldisaster [7]. Natural disasters, such as hurricanes, can cause significant structural damage to coralslimestone exoskeletons. Parrotfish rely directly on coral for protection from predation. Therefore at avery low coral cover more fish will be removed from the system due to predation. We incorporate thisinto the model via the K(C) term. At low coral cover the carrying capacity will be low. An increasein coral will result in an increase in carrying capacity as less fish will be removed due to predation.Under this assumption Blackwood et al. lets K(C) = C.
Previously it was assumed that shifts in the system happen immediately with no time delay. Inreality growth delays occur throughout the system however, we are particularly interested in any delaysassociated with grazing. We note that there will inevitably be an delay between increased carryingcapacity and an increase in parrotfish population. This is because an increase in coral reduces thenumber of parrotfish removed due to predation which allows more parrotfish to go on to reproducewhich then increases the population size. This is a substantial delay that could potentially alter theentire system. In the next section we look at different methods for introducing a delay into the model.
5 Delay Differential Equations (DDE)
In this section we provide a brief introduction into delay differential equations and the different ways inwhich delays can be incorporated into a system. We demonstrate; how a system of delay differentialequations can be reduced to a system of ordinary differential equations (ODE’s) and consider theimpact that introducing a delay into the system in section 4 has. A system which incorporate’s a timedelay is known as a delay differential equation (DDE).
Definition 5.1. A differential equation is known as a delay differential equation when its time deriva-tives depend on its solution and potentially its derivatives at previous times [16]. A linear differentialequation with continuous delay is given as:
dx
dt= Ax(t)−B
∞∫0
F (θ)x(t− θ)dθ
where A and B are real coefficients, F the delay kernal is an integrable function and θ is the delay.(Delay differential equations, 2016) [12]
For certain functions of F, such as Dirac’s delta function, this delay can be simplified to the lineardiscrete delay differential equation.
Definition 5.2. The Dirac delta function is a ‘non-physical, singularity function’ defined as:
δ(x) =
0 x 6= 0
∞ (undefined) x = 0where
∞∫−∞
δ(x)dx = 1 [17] (8)
Definition 5.3. A linear discrete delay differential equation is given by;
dx
dt= −Ax(t)−Bx(t− σ) where A,B ∈ <, and σ = the delay. [12] [16]
8

Fixed time delays of this type are often used in mathematical models. However they produceinfinite dynamical systems and thus their analysis quickly becomes complicated. Introducing a con-tinuous distributed delay is more realistic because it allows for variation in delay time [15]. In thisproject we consider distributed delays of gamma type as defined below.
Definition 5.4. Distributed delays of gamma type:∞∫0
x(t− s)gpa(s)ds =
1∫−∞
x(η)gpa(t− η)dη
where the kernal gpa is the density function of the gamma distribution: gpa(u) = apup−1
(p−1)! e−au. Here p,
the shape parameter, divided by a, the rate parameter, give the mean delay time [18].
For this type of Kernal a method known as the chain trick can be used to reduce the DDE into asystem of ODE’s, simplifying the analysis process [18]. This method is used in [15] where Blackwoodand Hastings introduce a distributed delay of gamma type into the system in section 4. This methodcan be demonstrated by introducing a delay into a generic model for species competition [15]. TheLotka-Volterra model of competition is given by; dx
dt = x(1 − x − ay), dydt = by(1 − y − cx) where
a, b, c > 0 [14]. Although this model is much simpler than the coral model it demonstrates a similarequilibrium structure with three boundary equilibria and one internal saddle point [15].
Introducing a distributed time delay into this Lotka-Volterra model gives:
dx
dt= x(1− x− ay),
dy
dt= by(1− y − c
t∫−∞
x(η)gpa(t− η)dη). (9)
If we let
zq =
t∫−∞
x(η)gpa(t− η)dη then, z1 =
t∫−∞
x(η)αe−α(t−η)dη. (10)
We now look to compute dz1dt . To do this the following property, defined in [15], is required:
dz
dt
∫f(t, η)dη = f(t, t) +
∫f(t, η)dη.
Applying this property gives
x(t)α+
(−
t∫−∞
x(η)αe−α(t−η)dη
)= α(x(t)− z1),
and the system reduces to:dx
dt= x(1− x− ay), (11)
dy
dt= by(1− y − czp), (12)
dz1dt
= α(x− z1). (13)
Note 5.1. If we were to solve this we would require boundary conditions. Let these be y(0) = y0,x(0) = ψ(0) where x(t) = ψ(t) and t ∈ (−∞, 0] because the system depends on the history of the system.
After applying the chain trick they become y(0) = y0, x(0) = ψ(0) and z(0) =0∫−∞
ψ(η)g1a(−η)dη [15].
Recall now the system of equations created in section 4. Blackwood and Hastings uses the abovemethod to introduce a time delay into the system. Whilst we do not study the specific mathematics itis interesting to briefly consider their findings. Using the values for the parameter estimated through
9

Figure 5: a) a simulation of the model in section 4 without a time delay. b) a simulation of the modelin section 4 with a time delay introduced [15]. In both graphs the dashed line represents macroalgaecover, the hard line represents coral cover and the dotted line represents the number of parrotfish.
historical data stated in section 3 and a computer simulation they are able to produce the graphs infigure 5.
Note that this system was created under the assumption that a natural disaster had greatly reducedthe coral. Which led in turn to a reduction in parrotfish numbers. Clearly the time delay has a bigimpact on the findings. In graph a), where no time delay is introduced both coral and parrotfishpopulations die out while macroalgae overgrows the system. In contrast graph b) shows a differentresult. The delay means the parrotfish population is able to keep the macroalgae at bay whichallows coral recovery. Through this system Blackwood and Hastings have successfully highlighted theimportance of incorporating a time delay. At the same time they have shown that if a structuredfishing plan is put into place then coral resilience to natural disasters could improve.
6 Conclusion
The above sections have considered how a system of ordinary differential equations can be created,developed, and analysed to gather information about how corals compete with macroalgae. By plottingthe system using P-plane we were able to highlight the importance of maintaining a high grazing rateto corals survival. Through considering two separate papers [7] and [15] we have considered thedifferent methods which have been used to extend the system. Whilst our original model highlightedthe importance of maintaining a high grazing rate, the extended model introduced a way to showthat a change in human behaviour, through the introduction of a controlled fishing system, couldimprove reef resilience to alternate stresses. Therefore it is clear that the development and analysisof mathematical models is useful when designing reef management programs and putting pressure oninstitutions and local communities to change their fishing habits.
The mathematics in this project, however is far from exhaustive, and only scrapes the surface ofthe mathematical research being carried out in this area. For the model described by Mumby et al.alone far more advanced mathematics has been carried out to gain a more detailed understandingof the way that the system behaves. Likewise there are papers which extend the work done in [7]and [15] by looking into the creation of bifurcation diagrams. Moreover introducing a delay into thesystem has been done in more than one way. For the system in section 3 the paper [6] goes on toadd a discrete time delay on grazing into the system and carries out in-depth analysis into the alteredsystem. Moreover mathematics is not only used to address the question of overfishing and competition.Research has also been carried out into producing models that consider corals symbiotic relationship
10

with the algae it relies on to gain nutrients.
Therefore it is sensible to conclude that while this project has provided a brief introduction intosome of the techniques that mathematicians are using to model coral reefs, much more work wouldneed to be done in order to fully study the current research on this topic.
References
[1] Obura, D. and Grimsditch, G. (2008) Coral Reefs, Climate Change and Resilience An Agendafor Action from the IUCN World Conservation Congress in Barcelona, Spain [online]. Availablefrom: http://cmsdata.iucn.org/downloads/resilience barcelona.pdf [Accessed 24 November 2015]
[2] Lallanilla, M. (2013) What are coral reefs? [online]. Available from:http://www.livescience.com/40276-coral-reefs.html [Accessed 20 November 2015]
[3] Pilling, G.M., Davy, S.K. and Sheppard, C.R.C. (2009) The biology of coral reefs. United King-dom: Oxford University Press
[4] Phinney, J., Hoegh-Guldberg, O. and Kleypas, J. (2007) Coral reefs and climate change: Scienceand management (coastal and Estuarine sciences). 1st ed. Phinney, J. (ed.). Washington, DC:American Geophysical Union
[5] Ridgell, R. (1988) Pacific nations and territories: The islands of Micronesia, Melanesia, andPolynesia. 2nd ed. Honolulu, HI: Bess Press
[6] Li, X., Wang, H., Zhang, Z., et al. (2014) Mathematical analysis of coral reef models. Journalof Mathematical Analysis and Applications, 416 (1): 352373
[7] Blackwood, J.C., Hastings, A. and Mumby, P.J. (2010) The effect of fishing on hysteresis inCaribbean coral reefs. Theoretical Ecology, 5 (1): 105114
[8] Diaz-Pulido, G. and J. McCook, L. (2008) Environmental Status: Macroalgae (Seaweeds). GreatBarrier Reef Marine Park Authority.
[9] Mumby, P.J., Hastings, A. and Edwards, H.J. (2007) Thresholds and the resilience of Caribbeancoral reefs. Nature, 450 (7166): 98101
[10] Weisstein, Eric W. ”Dynamical System.” From MathWorld–A Wolfram Web Resource.http://mathworld.wolfram.com/DynamicalSystem.html4
[11] Taylor, M.E. (2011) Introduction to differential equations (pure and applied undergraduatetexts). Providence, RI: American Mathematical Society
[12] Atay, F.M. (2010) Complex time-delay systems: Theory and applications. Berlin: Springer-Verlag Berlin and Heidelberg GmbH Co. K
[13] Weisstein, E.W. (2003) Logistic equation [online]. Available from:http://mathworld.wolfram.com/LogisticEquation.html [Accessed 3 February 2016]
[14] Sternberg, S. (2009) Lecture 15 Lotka-Volterra [online]. Available from:http://www.math.harvard.edu/library/sternberg/slides/11809LV.pdf [Accessed 3 February2016]
[15] Blackwood, J.C. and Hastings, A. (2010) The effect of time delays on Caribbean coralalgalinteractions. Journal of Theoretical Biology, 273 (1): 3743
[16] Delay differential equations (2016). Available from: http://reference.wolfram.com/language/tutorial/NDSolveDelayDifferentialEquations.html[Accessed 3 February 2016]
[17] The Dirac delta function. Available at: http://www.nada.kth.se ∼ annak/diracdelta.pdf (Ac-cessed: 22 March 2016).
[18] Smith, H. (2011) An introduction to delay differential equations with applications to the lifesciences. United States: Springer. (pp 119-130)
11